
ねじの任意負荷荷重試験装置
【課題】 従来、トルク変化に基づいて固有の振動動作を予測して、変数としてねじの回転数、振動振幅偏差、揺動周波数を入力して繰り返し運転し、ねじの異常を強制的に発生させて、原因を追求するという、得られた結果からねじの品質向上を図るための試験装置は存在していなかったという点である。
【解決手段】 電源と、その電源と電気的に接続されるモータドライブと、そのモータドライブで稼動されるねじ駆動用モータと、そのねじ駆動用モータとトルク検出器を介して設けられる対象ねじの設置部と、そのねじの設置部に設けられるタコジェネレータとを有し、前記モータドライブには電源と電気的に接続されたプログラマブルコントローラを接続し、かつ、ねじ駆動用モータにはパルスジェネレータを接続し、前記モータドライブには揺動予想入力波形設定器を接続し、前記プログラマブルコントローラには操作盤とレコーダを接続してあり、前記トルク検出器もそのレコーダに接続してあることとする。
【解決手段】 電源と、その電源と電気的に接続されるモータドライブと、そのモータドライブで稼動されるねじ駆動用モータと、そのねじ駆動用モータとトルク検出器を介して設けられる対象ねじの設置部と、そのねじの設置部に設けられるタコジェネレータとを有し、前記モータドライブには電源と電気的に接続されたプログラマブルコントローラを接続し、かつ、ねじ駆動用モータにはパルスジェネレータを接続し、前記モータドライブには揺動予想入力波形設定器を接続し、前記プログラマブルコントローラには操作盤とレコーダを接続してあり、前記トルク検出器もそのレコーダに接続してあることとする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はねじの任意負荷荷重試験装置に関し、各種のねじ、特にボールねじを対象として、負荷時(ボールを介してナットとの摩擦)の直線運動時に、ねじに発生するトルク変動に基づく固有の揺動(振動)動作を予測し、変数としてねじの回転数、振動振幅偏差、揺動周波数を入力として繰り返し運転させることで、ねじの異常を強制的に発生させて、故障原因を追求し、品質向上に役立てることを目的とした試験装置に関する。
【背景技術】
【0002】
ある一定条件の下にねじを運転(直線運動)させると、一定の負荷でありながらトルクが変化する状況がある。このトルク変化に起因して表面剥離や場合によっては座屈を生じてしまうこともある。
【0003】
また、ボールねじの場合、揺動(振動)が加えられると、ねじとナットの間に介在するボールがスリップしてしまい、正常な転動摩擦が得られず、ねじの駆動ができなくなってしまうこともある。
【0004】
従前は、このねじの試験に関して、材料やサイズ等を基として振動や圧力、衝撃時に対する耐性を計測するタイプのものは存在しているが、本願のようにトルク変化に起因する特有の揺動(振動)による負荷を計測、試験する装置は存在していない。
【先行技術文献】
【特許文献】
【0005】
出願人は、本願発明について、先行する技術文献を調査したが、格別に本願発明と関連し、類似していると思われる文献は発見できなかった。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする問題点は、従来、トルク変化に基づいて固有の振動動作を予測して、変数としてねじの回転数、振動振幅偏差、揺動周波数を入力して繰り返し運転し、ねじの異常を強制的に発生させて、原因を追求するという、得られた結果からねじの品質向上を図るための試験装置は存在していなかったという点である。
【課題を解決するための手段】
【0007】
上記した問題点を解決するために、本発明に係るねじの任意揺動負荷荷重試験装置は電源と、その電源と電気的に接続されるモータドライブと、そのモータドライブで稼動されるねじ駆動用モータと、そのねじ駆動用モータとトルク検出器を介して設けられる対象ねじの設置部と、そのねじの設置部に設けられるタコジェネレータとを有し、前記モータドライブには電源と電気的に接続されたプログラマブルコントローラを接続し、かつ、ねじ駆動用モータにはパルスジェネレータを接続し、前記モータドライブには揺動予想入力波形設定器を接続し、前記プログラマブルコントローラには操作盤とレコーダを接続してあり、前記トルク検出器もそのレコーダに接続してあることを特徴としている。
【0008】
また、本発明に係るねじの任意揺動負荷荷重試験装置は前記した対象ねじの設置部にはリミットスイッチを設けてあることを特徴とし、前記したねじ駆動用モータはサーボモータとしてあることを特徴とし、前記した操作盤はタッチパネルとしたことを特徴としている。
【0009】
さらに、本発明に係るねじの任意揺動付加荷重試験装置は前記したタコジェネレータは追随速度波形確認のためのDCタコジェネレータとしたことを特徴とし、前記したレコーダは表示画面と接続され、入力波形とタコジェネレータによる出力波形が並べて表示されることを特徴としている。
【発明の効果】
【0010】
本発明に係るねじの任意揺動負荷荷重試験装置は上記のように構成されている。そのため、想定、予想される揺動(振動)を対象となるねじに与え、それを波形として、入力と出力を視認比較することで、発生した異常を把握でき、その異常の原因も入力状況で判断できるので、対象となるねじの品質向上を原因に基づいて容易に図っていくことができることとなる。
【図面の簡単な説明】
【0011】
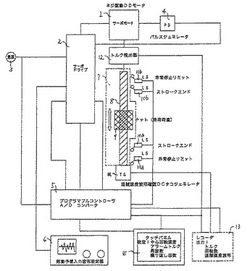
【図1】本発明に係る試験装置のブロック図である。
【図2】操作盤を示す図である。
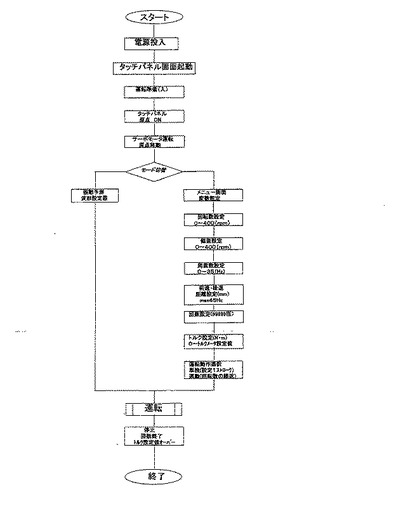
【図3】操作手順を示す図である。
【発明を実施するための形態】
【0012】
図面として示し、実施例で説明したように構成したことで実現した。
【実施例1】
【0013】
次に、本発明の好ましい実施の一例を図面を参照して説明する。図中1に対象となるねじ(ボールねじ)を直線運動(正逆直動)させるためのサーボモータを示している。このサーボモータ1はサーボドライブ2によって稼動されるものとなっており、このサーボドライブ2は電源3と電気的に接続されている。また、サーボドライブ2はパルスジェネレータ4と接続され、このパルスジェネレータ4を駆動させ、このパルスジェネレータ4から、パルスがフィードバックされて、プログラマブルコントローラ5からの指令と比較され常に速度指令と位置指令が追従して設定値を保持監視している。
【0014】
また、前記したサーボドライブ2にはプログラマブルコントローラ5及び揺動予想入力波形設定器6が電気的に接続され、プログラマで定められた順序、条件に従ってサーボドライブ2を制御し、任意に設定した揺動を付与するものとなっている。尚、前記したプログラマブルコントローラ5にはA/Dコンバータが設置されている。
【0015】
一方、図中7は対象となるねじの設置部を示しており、ユーザーが試験をしたいねじを設置する。ねじ8は、そのねじ8と対応し、位置決め固定されるナット9に螺合された状態で設置される。ねじ8にはサーボモータ1により直線運動が与えられるので、ナット9(介在されるボール)との間で転動摩擦が生じ、負荷荷重となる。ねじ8はナット9の存在によって回転を伴いながら直動することとなり、この直動は正逆とも可能となっている。
【0016】
また、ねじの設置部7の前後端には各々ストロークエンドのためのリミットスイッチ10a、10b及び非常停止用のリミットスイッチ11a、11bが設けられている。この各リミットスイッチ10a、10b、11a、11bはプログラマブルコントローラ5と接続されている。
【0017】
ねじの設置部7とサーボモータ1との間、より具体的には設置されたねじ8とサーボモータ1との間にはトルク検出器12が介在されており、このトルク検出器12はユーザーが設置するレコーダ13と接続される。このレコーダ13は勿論プログラマブルコントローラ5と接続されているもので、プログラマブルコントローラ5はトルク検出器12とレコーダ13とを接続する回線とも接続されている。
【0018】
さらに、ねじの設置部7の前端側、即ち、セットされるねじ8の前端側にはタコジェネレータ14が設けられている。このタコジェネレータ14は追随速度波形認識のためのDCタコジェネレータとなっているものでレコーダ13に接続されている。
【0019】
そして、図中15は本装置における数値を設定し、操作するための操作盤を示しており、プログラマブルコントローラ5と接続されており、そのプログラマブルコントローラ5とトルク検出器12とレコーダ13を接続する回線との接続回線とも接続されている。
【0020】
この操作盤15の具体例は図2として詳細に示す。操作盤15はタッチパネルとなっており、メニュー画面16と他のスイッチ群とより構成されている。スイッチ群には運転スイッチ17のほか、運転準備入スイッチ17a、運転準備切スイッチ17b及び非常停止スイッチ17cが存在している。
【0021】
メニュー画面16には原点スイッチ18があり、これを入力することでサーボモータ1が原点へ移動し、初期設定状態とされる。そして、メニュースイッチ19を入力することで回転数や偏差、周波数、前後進、回数設定、トルク設定の変数設定を可能としており、単独か連動かの運動動作の選択もできるものとしているもので、モード切替スイッチ20が設けられている。
【0022】
本実施例におけるねじの任意揺動負荷荷重試験装置は上記のように構成されている。ここで、この試験装置の操作手順を説明する。まず電源3を投入させて操作盤15の画面を起動させ、運転準備入スイッチ17aをONとする。ここは装置を運転するにあたっての変数設定等の事前準備のための時間となる。次いで原点スイッチ18をONしてサーボモータ1を動かし、原点へ移動させ初期状態とする。
【0023】
次に、モード切替スイッチ20をONして、メニュー画面16によって変数を設定する。この変数として、回転数設定(0〜400rpm)、偏差設定(0〜400rpm)、周波数設定(0〜35Hz、最大45Hz)、前進・後進の距離設定(mm)、回数設定(最高99999回)、トルク設定(N・m、0〜トルクメータ設定値)があり、そして運転動作選択(単独は1ストローク、連動は設定値データの繰り返し)を設定する。
【0024】
また、モード切替スイッチ20をONしてモードを切り替え、揺動予想入力波形設定器6を稼動させ、任意の揺動(振動)をねじ8に与えるよう波形を設定する。尚、この揺動予想入力波形設定器6における設定と前記した変数設定はどちらが先に設定されてもよい。
【0025】
上記した設定が終了したら運転スイッチ17を入力して装置を稼動させる。そして、設定した回転数の回数が終了した場合、トルク設定値がオーバーした場合、もしくは、停止スイッチ17cが入力された場合、その運転は終了となる。
【0026】
この装置の稼動にあって、各種の入力情報、出力情報はレコーダ13に記録され、このデータは表示画面に表示される。特に、パルスジェネレータ4による入力波形と、タコジェネレータ14による出力波形は並列して画面にその波形、波高が表示されるもので、この波形のずれや歪みがねじ8に生じた異常を示すこととなる。この異常の部分からその原因を追求して行くことができる。
【産業上の利用可能性】
【0027】
本実施例に係るねじの任意揺動負荷荷重試験装置は上記のように構成されている。本実施例では対象となるねじをボールねじとして説明したが、これに限定されるものではなく、他のねじ類に対しても応用実施できることは勿論である。
【符号の説明】
【0028】
1 サーボモータ
2 サーボドライブ
3 電源
4 パルスジェネレータ
5 プログラマブルコントローラ
6 揺動予想入力波形設定器
7 ねじの設置部
8 ねじ
9 ナット
10a リミットスイッチ
10b リミットスイッチ
11a リミットスイッチ
11b リミットスイッチ
12 トルク検出器
13 レコーダ
14 タコジェネレータ
15 操作盤
16 メニュー画面(タッチパネル)
17〜17c スイッチ
18 原点スイッチ
19 メニュースイッチ
20 モード切替スイッチ
【技術分野】
【0001】
本発明はねじの任意負荷荷重試験装置に関し、各種のねじ、特にボールねじを対象として、負荷時(ボールを介してナットとの摩擦)の直線運動時に、ねじに発生するトルク変動に基づく固有の揺動(振動)動作を予測し、変数としてねじの回転数、振動振幅偏差、揺動周波数を入力として繰り返し運転させることで、ねじの異常を強制的に発生させて、故障原因を追求し、品質向上に役立てることを目的とした試験装置に関する。
【背景技術】
【0002】
ある一定条件の下にねじを運転(直線運動)させると、一定の負荷でありながらトルクが変化する状況がある。このトルク変化に起因して表面剥離や場合によっては座屈を生じてしまうこともある。
【0003】
また、ボールねじの場合、揺動(振動)が加えられると、ねじとナットの間に介在するボールがスリップしてしまい、正常な転動摩擦が得られず、ねじの駆動ができなくなってしまうこともある。
【0004】
従前は、このねじの試験に関して、材料やサイズ等を基として振動や圧力、衝撃時に対する耐性を計測するタイプのものは存在しているが、本願のようにトルク変化に起因する特有の揺動(振動)による負荷を計測、試験する装置は存在していない。
【先行技術文献】
【特許文献】
【0005】
出願人は、本願発明について、先行する技術文献を調査したが、格別に本願発明と関連し、類似していると思われる文献は発見できなかった。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする問題点は、従来、トルク変化に基づいて固有の振動動作を予測して、変数としてねじの回転数、振動振幅偏差、揺動周波数を入力して繰り返し運転し、ねじの異常を強制的に発生させて、原因を追求するという、得られた結果からねじの品質向上を図るための試験装置は存在していなかったという点である。
【課題を解決するための手段】
【0007】
上記した問題点を解決するために、本発明に係るねじの任意揺動負荷荷重試験装置は電源と、その電源と電気的に接続されるモータドライブと、そのモータドライブで稼動されるねじ駆動用モータと、そのねじ駆動用モータとトルク検出器を介して設けられる対象ねじの設置部と、そのねじの設置部に設けられるタコジェネレータとを有し、前記モータドライブには電源と電気的に接続されたプログラマブルコントローラを接続し、かつ、ねじ駆動用モータにはパルスジェネレータを接続し、前記モータドライブには揺動予想入力波形設定器を接続し、前記プログラマブルコントローラには操作盤とレコーダを接続してあり、前記トルク検出器もそのレコーダに接続してあることを特徴としている。
【0008】
また、本発明に係るねじの任意揺動負荷荷重試験装置は前記した対象ねじの設置部にはリミットスイッチを設けてあることを特徴とし、前記したねじ駆動用モータはサーボモータとしてあることを特徴とし、前記した操作盤はタッチパネルとしたことを特徴としている。
【0009】
さらに、本発明に係るねじの任意揺動付加荷重試験装置は前記したタコジェネレータは追随速度波形確認のためのDCタコジェネレータとしたことを特徴とし、前記したレコーダは表示画面と接続され、入力波形とタコジェネレータによる出力波形が並べて表示されることを特徴としている。
【発明の効果】
【0010】
本発明に係るねじの任意揺動負荷荷重試験装置は上記のように構成されている。そのため、想定、予想される揺動(振動)を対象となるねじに与え、それを波形として、入力と出力を視認比較することで、発生した異常を把握でき、その異常の原因も入力状況で判断できるので、対象となるねじの品質向上を原因に基づいて容易に図っていくことができることとなる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る試験装置のブロック図である。
【図2】操作盤を示す図である。
【図3】操作手順を示す図である。
【発明を実施するための形態】
【0012】
図面として示し、実施例で説明したように構成したことで実現した。
【実施例1】
【0013】
次に、本発明の好ましい実施の一例を図面を参照して説明する。図中1に対象となるねじ(ボールねじ)を直線運動(正逆直動)させるためのサーボモータを示している。このサーボモータ1はサーボドライブ2によって稼動されるものとなっており、このサーボドライブ2は電源3と電気的に接続されている。また、サーボドライブ2はパルスジェネレータ4と接続され、このパルスジェネレータ4を駆動させ、このパルスジェネレータ4から、パルスがフィードバックされて、プログラマブルコントローラ5からの指令と比較され常に速度指令と位置指令が追従して設定値を保持監視している。
【0014】
また、前記したサーボドライブ2にはプログラマブルコントローラ5及び揺動予想入力波形設定器6が電気的に接続され、プログラマで定められた順序、条件に従ってサーボドライブ2を制御し、任意に設定した揺動を付与するものとなっている。尚、前記したプログラマブルコントローラ5にはA/Dコンバータが設置されている。
【0015】
一方、図中7は対象となるねじの設置部を示しており、ユーザーが試験をしたいねじを設置する。ねじ8は、そのねじ8と対応し、位置決め固定されるナット9に螺合された状態で設置される。ねじ8にはサーボモータ1により直線運動が与えられるので、ナット9(介在されるボール)との間で転動摩擦が生じ、負荷荷重となる。ねじ8はナット9の存在によって回転を伴いながら直動することとなり、この直動は正逆とも可能となっている。
【0016】
また、ねじの設置部7の前後端には各々ストロークエンドのためのリミットスイッチ10a、10b及び非常停止用のリミットスイッチ11a、11bが設けられている。この各リミットスイッチ10a、10b、11a、11bはプログラマブルコントローラ5と接続されている。
【0017】
ねじの設置部7とサーボモータ1との間、より具体的には設置されたねじ8とサーボモータ1との間にはトルク検出器12が介在されており、このトルク検出器12はユーザーが設置するレコーダ13と接続される。このレコーダ13は勿論プログラマブルコントローラ5と接続されているもので、プログラマブルコントローラ5はトルク検出器12とレコーダ13とを接続する回線とも接続されている。
【0018】
さらに、ねじの設置部7の前端側、即ち、セットされるねじ8の前端側にはタコジェネレータ14が設けられている。このタコジェネレータ14は追随速度波形認識のためのDCタコジェネレータとなっているものでレコーダ13に接続されている。
【0019】
そして、図中15は本装置における数値を設定し、操作するための操作盤を示しており、プログラマブルコントローラ5と接続されており、そのプログラマブルコントローラ5とトルク検出器12とレコーダ13を接続する回線との接続回線とも接続されている。
【0020】
この操作盤15の具体例は図2として詳細に示す。操作盤15はタッチパネルとなっており、メニュー画面16と他のスイッチ群とより構成されている。スイッチ群には運転スイッチ17のほか、運転準備入スイッチ17a、運転準備切スイッチ17b及び非常停止スイッチ17cが存在している。
【0021】
メニュー画面16には原点スイッチ18があり、これを入力することでサーボモータ1が原点へ移動し、初期設定状態とされる。そして、メニュースイッチ19を入力することで回転数や偏差、周波数、前後進、回数設定、トルク設定の変数設定を可能としており、単独か連動かの運動動作の選択もできるものとしているもので、モード切替スイッチ20が設けられている。
【0022】
本実施例におけるねじの任意揺動負荷荷重試験装置は上記のように構成されている。ここで、この試験装置の操作手順を説明する。まず電源3を投入させて操作盤15の画面を起動させ、運転準備入スイッチ17aをONとする。ここは装置を運転するにあたっての変数設定等の事前準備のための時間となる。次いで原点スイッチ18をONしてサーボモータ1を動かし、原点へ移動させ初期状態とする。
【0023】
次に、モード切替スイッチ20をONして、メニュー画面16によって変数を設定する。この変数として、回転数設定(0〜400rpm)、偏差設定(0〜400rpm)、周波数設定(0〜35Hz、最大45Hz)、前進・後進の距離設定(mm)、回数設定(最高99999回)、トルク設定(N・m、0〜トルクメータ設定値)があり、そして運転動作選択(単独は1ストローク、連動は設定値データの繰り返し)を設定する。
【0024】
また、モード切替スイッチ20をONしてモードを切り替え、揺動予想入力波形設定器6を稼動させ、任意の揺動(振動)をねじ8に与えるよう波形を設定する。尚、この揺動予想入力波形設定器6における設定と前記した変数設定はどちらが先に設定されてもよい。
【0025】
上記した設定が終了したら運転スイッチ17を入力して装置を稼動させる。そして、設定した回転数の回数が終了した場合、トルク設定値がオーバーした場合、もしくは、停止スイッチ17cが入力された場合、その運転は終了となる。
【0026】
この装置の稼動にあって、各種の入力情報、出力情報はレコーダ13に記録され、このデータは表示画面に表示される。特に、パルスジェネレータ4による入力波形と、タコジェネレータ14による出力波形は並列して画面にその波形、波高が表示されるもので、この波形のずれや歪みがねじ8に生じた異常を示すこととなる。この異常の部分からその原因を追求して行くことができる。
【産業上の利用可能性】
【0027】
本実施例に係るねじの任意揺動負荷荷重試験装置は上記のように構成されている。本実施例では対象となるねじをボールねじとして説明したが、これに限定されるものではなく、他のねじ類に対しても応用実施できることは勿論である。
【符号の説明】
【0028】
1 サーボモータ
2 サーボドライブ
3 電源
4 パルスジェネレータ
5 プログラマブルコントローラ
6 揺動予想入力波形設定器
7 ねじの設置部
8 ねじ
9 ナット
10a リミットスイッチ
10b リミットスイッチ
11a リミットスイッチ
11b リミットスイッチ
12 トルク検出器
13 レコーダ
14 タコジェネレータ
15 操作盤
16 メニュー画面(タッチパネル)
17〜17c スイッチ
18 原点スイッチ
19 メニュースイッチ
20 モード切替スイッチ
【特許請求の範囲】
【請求項1】
電源と、その電源と電気的に接続されるモータドライブと、そのモータドライブで稼動されるねじ駆動用モータと、そのねじ駆動用モータとトルク検出器を介して設けられる対象ねじの設置部と、そのねじの設置部に設けられるタコジェネレータとを有し、前記モータドライブには電源と電気的に接続されたプログラマブルコントローラを接続し、かつ、ねじ駆動用モータにはパルスジェネレータを接続し、前記モータドライブには揺動予想入力波形設定器を接続し、前記プログラマブルコントローラには操作盤とレコーダを接続してあり、前記トルク検出器もそのレコーダに接続してあることを特徴とするねじの任意揺動負荷荷重試験装置。
【請求項2】
前記した対象ねじの設置部にはリミットスイッチを設けてあることを特徴とする請求項1に記載のねじの任意揺動負荷荷重試験装置。
【請求項3】
前記したねじ駆動用モータはサーボモータとしてあることを特徴とする請求項1または2に記載のねじの任意揺動負荷荷重試験装置。
【請求項4】
前記した操作盤はタッチパネルとしたことを特徴とする請求項1から3のうち1項に記載のねじの任意揺動負荷荷重試験装置。
【請求項5】
前記したタコジェネレータは追随速度波形確認のためのDCタコジェネレータとしたことを特徴とする請求項1から4のうち1項に記載のねじの任意揺動負荷荷重試験装置。
【請求項6】
前記したレコーダは表示画面と接続され、入力波形とタコジェネレータによる出力波形が並べて表示されることを特徴とする請求項1から5のうち1項に記載のねじの任意揺動負荷荷重試験装置。
【請求項1】
電源と、その電源と電気的に接続されるモータドライブと、そのモータドライブで稼動されるねじ駆動用モータと、そのねじ駆動用モータとトルク検出器を介して設けられる対象ねじの設置部と、そのねじの設置部に設けられるタコジェネレータとを有し、前記モータドライブには電源と電気的に接続されたプログラマブルコントローラを接続し、かつ、ねじ駆動用モータにはパルスジェネレータを接続し、前記モータドライブには揺動予想入力波形設定器を接続し、前記プログラマブルコントローラには操作盤とレコーダを接続してあり、前記トルク検出器もそのレコーダに接続してあることを特徴とするねじの任意揺動負荷荷重試験装置。
【請求項2】
前記した対象ねじの設置部にはリミットスイッチを設けてあることを特徴とする請求項1に記載のねじの任意揺動負荷荷重試験装置。
【請求項3】
前記したねじ駆動用モータはサーボモータとしてあることを特徴とする請求項1または2に記載のねじの任意揺動負荷荷重試験装置。
【請求項4】
前記した操作盤はタッチパネルとしたことを特徴とする請求項1から3のうち1項に記載のねじの任意揺動負荷荷重試験装置。
【請求項5】
前記したタコジェネレータは追随速度波形確認のためのDCタコジェネレータとしたことを特徴とする請求項1から4のうち1項に記載のねじの任意揺動負荷荷重試験装置。
【請求項6】
前記したレコーダは表示画面と接続され、入力波形とタコジェネレータによる出力波形が並べて表示されることを特徴とする請求項1から5のうち1項に記載のねじの任意揺動負荷荷重試験装置。
【図1】



【図2】

【図3】
【図2】
【図3】
【公開番号】特開2013−88170(P2013−88170A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−226758(P2011−226758)
【出願日】平成23年10月14日(2011.10.14)
【出願人】(506035603)
【出願人】(511248777)株式会社大洋電機エンジニアリング (1)
【出願人】(511248788)
【出願人】(511248799)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月14日(2011.10.14)
【出願人】(506035603)
【出願人】(511248777)株式会社大洋電機エンジニアリング (1)
【出願人】(511248788)
【出願人】(511248799)
【Fターム(参考)】
[ Back to top ]