
アイドリングストップ制御装置
【課題】自車両周辺の交通状況に基づいてアイドリングストップの実施の可否を的確に判断することができる技術を提供する。
【解決手段】アイドリングストップ制御装置1の第1条件判定部13は、自車両の各センサ類から特定した自車両の状態を判定要素にして、アイドリングストップを実施可能とするための自車両の都合に関する第1条件が成立するか否かを判定する(第1条件フラグを出力)。第2条件判定部15は、車車間通信等により取得した周辺車両データで示される周辺車両の状態を判定要素にして、アイドリングストップを実施可能とするための周辺車両による都合に関する第2条件が成立するか否かを判定する(第2条件フラグを出力)。IS指令出力部17は、第1条件フラグ及び第2条件フラグの出力結果に基づき、第1条件及び第2条件の双方が成立することを条件に、エンジン制御部28に対してアイドリングストップを指示する。
【解決手段】アイドリングストップ制御装置1の第1条件判定部13は、自車両の各センサ類から特定した自車両の状態を判定要素にして、アイドリングストップを実施可能とするための自車両の都合に関する第1条件が成立するか否かを判定する(第1条件フラグを出力)。第2条件判定部15は、車車間通信等により取得した周辺車両データで示される周辺車両の状態を判定要素にして、アイドリングストップを実施可能とするための周辺車両による都合に関する第2条件が成立するか否かを判定する(第2条件フラグを出力)。IS指令出力部17は、第1条件フラグ及び第2条件フラグの出力結果に基づき、第1条件及び第2条件の双方が成立することを条件に、エンジン制御部28に対してアイドリングストップを指示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、所定のアイドリングストップ条件が成立したときに車両のエンジンのアイドリングを停止するアイドリングストップ制御装置に関する。
【背景技術】
【0002】
停車時等に一時的にエンジンを停止することで燃料消費量を低減するアイドリングストップに関する従来技術として、特許文献1に記載の技術が知られている。この従来技術では、車両の発進後に車速が規定速度以上に到達する条件を満たさない限りアイドリングストップを行わないようにしている。このような制御をすることで、車両のアイドリングストップ期間を可能な限り延長して燃料消費量の節減を図りながら、渋滞時等にエンジンの停止及び再始動が頻繁に行われるのを防止できるとしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−257121
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術の構成では、仮に燃費向上を期待できる所定時間A以上のアイドリングストップが可能な状況であったとしても、前回の発進から車速が規定速度以上に到達するという速度履歴条件を満たしていなければアイドリングストップが行われないことになる。つまり、アイドリングストップによって燃料消費量を節減できる機会がありながら、自車両の速度履歴条件が逆に仇となって折角の機会を逸してしまうという問題がある。
【0005】
例えば、停止信号や渋滞に伴う停車時のアイドリングストップ中において、前の車両との車間を詰めるために少しだけ前進するという状況を想定してみる。この場合、エンジンを再始動し、そのまま微速で前進して速度がアイドリングストップの規定速度まで上がりきらないまま停止すると、その後の停止時間が長かった(所定時間A以上のアイドリングストップが可能であった)としてもアイドリングストップが実施されず、その停止中にも燃料を消費し続けることになる。
【0006】
一方、比較的軽度の渋滞の中を走行中に、アイドリングストップの規定速度付近の速度を出しながら断続的に発停止を繰返すような状況を想定してみる。この場合、発進後に速度が一度でも規定速度を達していれば、次の停止時にたとえ短時間のエンジン停止しか見込まれないような状況であってもアイドリングストップが実施され、またすぐにエンジンを再始動するといった悪循環となることがある。このような状況下でアイドリングストップをした場合、アイドリングストップをしなかった場合よりもむしろ燃費が悪化してしまうこともあり得る。
【0007】
アイドリングストップが可能な時間は、自車両側の都合だけでなく、渋滞等の自車両周辺の他車両の走行状況に大きく左右されると考えられる。したがって、従来技術のような自車両の速度履歴条件だけでアイドリングストップの可否を適切に判断するのは難しい。
【0008】
本発明は、上記問題を解決するためになされたものであり、自車両周辺の交通状況に基づいてアイドリングストップの実施の可否を的確に判断することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するためになされた請求項1に記載のアイドリングストップ制御装置は、次のような特徴を有する。第1条件判定手段は、自車両の状態を判定要素にして、アイドリングストップを実施可能とするための自車両の都合に関する所定の第1条件が成立するか否かを判定する。一方、第2条件判定手段は、周辺車両情報取得手段により取得した周辺車両情報で示される周辺車両の状態を判定要素にして、アイドリングストップを実施可能とするための周辺車両による都合に関する所定の第2条件が成立するか否かを判定する。そして、アイドリングストップ制御手段は、第1条件判定手段及び第2条件判定手段の判定結果に基づき、第1条件及び第2条件の双方が成立することを条件に、自車両のエンジン制御手段に対してアイドリングストップを指示する。
【0010】
このように構成された本発明によれば、自車両の状態を判定要素とするアイドリングストップの実施要件(第1条件)だけでなく、周辺車両の状態を判定要素とするアイドリングストップの実施要件(第2条件)を加味して、アイドリングストップの可否を的確に判断できる。
【0011】
一例として、自車両がアイドリングストップを実施できる期間は、自車両の走行を制限する周辺車両の停滞度合に因るところが大きい。そこで、例えば、自車両が取得した周辺車両情報に基づく周辺車両の状態が、所定時間以上のアイドリングストップが期待できるような所定の停滞度合を呈することを第2条件とすることが考えられる。このようにすることで、周辺車両の停滞により燃費を向上可能な所定時間以上の停止時間を確保できる状況において、的確にアイドリングストップを実施できるようになる。反対に、交通流が順調で周辺車両が停滞していない状況では、燃費を向上可能な所定時間以上の停止期間を確保できないと考えられる。このような状況下では、たとえ自車両の走行状態がアイドリングストップ可能な第1条件を満たす場合でも、周辺車両に関する第2条件を不成立とすることで、燃費の向上に寄与しない余分なアイドリングストップの実施を回避できる。
【0012】
つぎに、請求項2に記載のアイドリングストップ制御装置は、自車両の進路前方を先行する先行車両を特定し、その特定した先行車両に該当する周辺車両情報のみに基づき、第2条件が成立するか否かを判定することを特徴とする。自車両がアイドリングストップを実施できる期間は、主に自車両の進路前方を先行する車両の停滞度合に因るところが大きいと考えられる。そこで、自車両の進路前方を先行する先行車両を特定し、その先行車両の状態を判定要素に第2条件の成否を判定することで、アイドリングストップの可否を的確に判断できる。
【0013】
つぎに、請求項3に記載のアイドリングストップ制御装置は、次のような特徴を有する。周辺車両情報取得手段は、周辺車両のアクセル開度に関する情報を含む周辺車両情報を取得する。また、第2条件は、周辺車両のアクセル開度の状況に関する条件を含む。そして、第2条件判定手段は、周辺車両情報で示される周辺車両のアクセル開度の状況に基づき、第2条件が成立するか否かを判定する。
【0014】
例えば、周辺車両のアクセル開度が総じて大きい場合、たとえ今自車両がエンジン停止できる状態であったとしても、周辺車両が動くことでまたすぐに再始動を余儀なくされ、その結果、燃費を向上可能な所定時間以上の停止期間を確保できない可能性が高い。よって、このような状況下では、たとえ自車両の走行状態がアイドリングストップ可能な第1条件を満たす場合であっても、周辺車両に関する第2条件を不成立とすることで、燃費の向上に寄与しない余分なアイドリングストップの実施を回避できる。反対に、周辺車両のアクセル開度が総じて小さい場合、周辺車両が停滞している可能性が高いと考えられ、燃費を向上可能な所定時間以上の停止期間を確保できる可能性が高い。よって、このような状況下でアイドリングストップを実施することで燃費を向上できる。このように、周辺車両のアクセル開度の状況を判定要素に第2条件の成否を判定することで、アイドリングストップの可否を的確に判断できる。
【0015】
請求項4に記載のアイドリングストップ制御装置は、次のような特徴を有する。周辺車両情報取得手段は、周辺車両の速度に関する情報を含む周辺車両情報を取得する。また、第2条件は、周辺車両の速度に関する条件を含む。そして、第2条件判定手段は、周辺車両情報で示される周辺車両の速度に基づき、第2条件が成立するか否かを判定する。
【0016】
例えば、周辺車両の速度が総じて大きい場合、たとえ今自車両がエンジン停止できる状態であったとしても、周辺車両の流れに合わせてまたすぐに再始動を余儀なくされ、その結果、燃費を向上可能な所定時間以上の停止期間を確保できない可能性が高い。よって、このような状況下では、たとえ自車両の走行状態がアイドリングストップ可能な第1条件を満たす場合であっても、周辺車両に関する第2条件を不成立とすることで、燃費の向上に寄与しない余分なアイドリングストップの実施を回避できる。反対に、周辺車両の速度が総じて小さい場合、周辺車両が停滞している可能性が高いと考えられ、燃費を向上可能な所定時間以上の停止期間を確保できる可能性が高い。よって、このような状況下でアイドリングストップを実施することで燃費を向上できる。このように、周辺車両の速度の状況を判定要素に第2条件の成否を判定することで、アイドリングストップの可否を的確に判断できる。
【0017】
一方、周辺車両のアクセル開度の状況を判定要素にする場合、アクセル開度の時間的経緯を反映するために、請求項5に記載ように構成するとよい。つまり、記憶手段は、周辺車両情報取得手段により取得した周辺車両情報を時系列に記憶する。また、第2条件は、周辺車両の時系列のアクセル開度の積算値に関する条件を含む。そして、第2条件判定手段は、記憶手段が記憶している時系列の周辺車両情報で示されるアクセル開度を、周辺車両情報の取得時期が古い程小さくなる時間重みを付けて積算し、この加重積算の算出結果に応じて第2条件が成立するか否かを判定する。
【0018】
周辺車両における過去から現在までの時系列のアクセル開度を積算することで、その周辺車両の走行状態を精度よく把握できる。このとき、情報の取得時期が古い程小さくなる時間重みを付けて積算を行うことで、時間的に古いアクセル開度の情報の影響を相対的に小さくし、新しいアクセル開度の情報を積算結果に強く反映させることができる。このような時間による重み付けをしたアクセル開度の積算値を第2条件の判定要素に利用することで、アイドリングストップの可否を周辺車両の現状に即して判断できる。
【0019】
あるいは、周辺車両のアクセル開度の状況を判定要素にする場合、周辺車両の位置による自車両の走行への影響を反映するために、請求項6に記載ように構成するとよい。つまり、位置情報取得手段は、自車両の現在位置に関する位置情報を取得する。記憶手段は、周辺車両情報取得手段により取得した周辺車両情報、及び、位置情報取得手段により取得した位置情報を時系列に記憶する。また、第2条件は、周辺車両の時系列のアクセル開度の積算値に関する条件を含む。そして、第2条件判定手段は、記憶手段が記憶している時系列の周辺車両情報で示されるアクセル開度を、周辺車両情報の取得時期における当該周辺車両とその取得時期に対応する自車両との位置情報から特定した車間距離が大きい程小さくなる距離重みを付けて積算し、この加重積算の算出結果に応じて第2条件が成立するか否かを判定する。
【0020】
自車両の走行が周辺車両により制限される場合、互いの車間距離が小さいほどその影響を受けやすく、車間距離が大きいほど影響を受けにくい。つまり、周辺車両の状態に基づいてアイドリングストップできる期間を考慮する場合、自車両に近い周辺車両のアクセル開度をより重視すればよい。そこで、周辺車両における過去から現在までの時系列のアクセル開度を積算する際、その時々の自車両との車間距離が大きい程小さくなる距離重みを付けて積算を行うことで、自車両から遠い周辺車両のアクセル開度の情報の影響を相対的に小さくし、自車両から近い周辺車両のアクセル開度の情報を積算結果に強く反映させることができる。このような車間距離による重み付けをしたアクセル開度の積算値を第2条件の判定要素に利用することで、アイドリングストップの可否を周辺車両の位置状況に即して判断できる。
【0021】
さらに、請求項7に記載のように、上述の距離重みに加え、周辺車両情報の取得時期が古い程小さくなる時間重みを付けて時系列のアクセル開度を積算するようにしてもよい。
あるいは、上述の時間重みや距離重みの他に、周辺車両の進路変更や方向転換等の動向に基づく重み付けを考慮してアクセル開度を積算するために、請求項8に記載ように構成するとよい。つまり、周辺車両情報取得手段は、周辺車両のウインカの作動状況を示すウインカ情報を更に含む周辺車両情報を取得する。また、第2条件判定手段は、更に周辺車両情報の取得時期におけるウインカの作動状況に応じたウインカ作動重みを付けてアクセル開度を積算し、この加重積算の算出結果に応じて第2条件の成否を判定する。
【0022】
例えば、自車両前方の周辺車両が自車両の進路と異なる方向へ移動すると予測できるウインカの作動状況を把握した場合、そのときの周辺車両のアクセル開度を小さく補正する重みを付けてアクセル開度を積算するといった運用が考えられる。このように、周辺車両のウインカ情報に基づいて、周辺車両の自車両に対する影響度合をアクセル開度の積算結果に反映することで、アイドリングストップの可否を周辺車両の現状に即して的確に判断できる。
【0023】
ところで、アイドリングストップの可否の判定要素として、周辺車両情報に加え交差点の位置情報を利用することが考えられる。具体的には、請求項9に記載のように構成するとよい。すなわち、交差点情報取得手段は、自車両の進路前方の交差点の位置に関する情報を含む交差点情報を取得する。また、位置情報取得手段は、自車両の現在位置に関する位置情報を取得する。第2条件は、自車両の現在位置と進路前方の交差点との所定の位置関係に関する条件を含む。そして、第2条件判定手段は、更に交差点情報取得手段により取得した交差点情報と、位置情報取得手段により取得した位置情報で示される自車両の現在位置との所定の位置関係を判定要素に加えて、第2条件が成立するか否かを判定する。
【0024】
例えば、交差点での信号待ち等により交通流の停滞が生じている場合、自車両の現在地から交差点までの距離の長短によってその交差点を要因とする交通流の影響が自車両に波及する時期や度合が異なる。それにより、自車両のアイドリングストップが可能な期間も異なると考えられる。そこで、上記のように現在位置と当該交差点との位置関係を判定要素に加えて第2条件の成否を判定することで、交差点を要因とする交通流の波及度合を反映した態様にてアイドリングストップの可否を判断できる。
【0025】
あるいはアイドリングストップの可否の判定要素として、周辺車両情報に加え交差点に設けられた交通信号機の信号情報を利用することが考えられる。具体的には、請求項10に記載のように構成するとよい。すなわち、信号情報取得手段は、自車両の進路前方の交差点に設置された交通信号機の信号現示の予定に関する情報を含む信号情報を取得する。また、第2条件は、自車両の進路前方の交差点に設置された交通信号機における信号の切替時期に関する条件を含む。そして、第2条件判定手段は、更に信号情報取得手段により取得した信号情報から特定した信号の切替時期を判定要素に加えて第2条件が成立するか否かを判定する。
【0026】
前方の交通信号機の信号が何時どのように切替わるかによって、自車両が停止してから再発進するまでの期間が異なる。つまり、自車両のアイドリングストップが可能な期間も異なると考えられる。例えば、現在表示中の停止信号の残り時間が少ない場合、アイドリングストップが可能な期間も短い。反対に、次の進行信号に切替わるまでの時間が長い場合、アイドリングストップが可能な期間も長い。そこで、上記のように前方交差点における信号の切替時期を判定要素に加えて第2条件の成否を判定することで、信号の切替時期を反映した態様にてアイドリングストップの可否を判断できる。
【0027】
さらに、信号情報を用いてアイドリングストップの可否を判断する場合、請求項11に記載のように構成してもよい。すなわち、第2条件判定手段によって、周辺車両情報に関する判定要素が第2条件の成立要件を満たし、かつ、信号の切替時期に関する判定要素が第2条件の成立要件を満たさないと判定された場合、シフトダウン指示手段は自車両の変速機のシフトポジションを制御するシフト制御手段に対してシフトダウンを指示する。
【0028】
周辺車両情報に関する判定要素が第2条件の成立要件を満たし、かつ、信号の切替時期に関する判定要素が第2条件の成立要件を満たさない状況下では、信号の切替時期が到来すると程なくして再加速をすることが予想される。そのような場合、予め自車両の変速機をシフトダウンしておくことで、再加速時の速度の立ち上がりをよくできる。よって、上記発明によれば、燃費の向上が期待できないアイドリングストップを回避すると共に、ドライビリティを向上できる。
【0029】
さらに、請求項12に記載のように、シフトダウン指示手段は、第2条件判定手段による判断結果に加え、更に自車両の現在のエンジン回転数と、アクセル全閉時にエンジンへの燃料供給をカットするための条件である燃料カット回転数とが所定の関係になっていることを条件にシフトダウンを指示するように構成するとよい。
【0030】
燃料噴射が電子的に制御される一般的なエンジンでは、アクセルを全閉した惰性走行時におけるエンジン回転数が燃料カット回転数以上の場合であれば燃料噴射がカットされ、燃料カット回転数を下回る場合であれば燃料噴射が行われアイドリング状態になる。そこで、例えば、燃料カット回転数近傍でシフトダウンを行うことで、燃料カット回転数よりも高いエンジン回転数を維持するようにすれば、燃料消費を抑えることができる。よって、アイドリングストップを行うことができない状況下であっても、燃料カット回転数に基づくシフトダウンの制御をすることで燃費を向上できる。
【0031】
ところで、第2条件判定手段による判定の対象となる、自車両の進路前方の先行車両を特定する具体的な方法については、請求項13に記載のようにすることが考えられる。すなわち、位置方位情報取得手段は、自車両の現在位置及び進行方位を示す位置方位情報を取得する。また、周辺車両情報取得手段は、周辺車両の現在位置及び進行方位を示す位置方位情報を含む周辺車両情報を取得する。そして、第2条件判定手段は、位置方位情報取得手段により取得した位置方位情報で示される自車両の現在位置及び進行方位と、周辺車両情報取得手段により取得した位置方位情報で示される周辺車両の現在位置及び進行方位との関係に基づいて、自車両の進路前方を先行する先行車両を特定する。
【0032】
このような構成において、さらに、請求項14に記載のようにしてもよい。すなわち、第2条件判定手段は、自車両の現在位置から進行方位に向けて延びる仮想進路上に位置する周辺車両であって、その周辺車両の進行方位と自車両の進行方位との差が所定範囲内である条件を満たすものを先行車両として特定する。
【0033】
請求項13,14に記載の発明によれば、自車両と周辺車両の位置及び進行方位のみの簡易な構成によって先行車両を特定することができ、ナビゲーション装置等の高度な経路案内手段等を持たなくとも実現可能である。
【0034】
さらに、自車両の進路を特定する際には、位置及び進行方位の情報に加え、交差点の位置情報と自車両のウインカの作動状況とを利用することができる。具体的には、請求項15に記載のように構成するとよい。すなわち、距離情報取得手段は、自車両の現在位置から進路前方の交差点までの距離を取得する。また、ウインカ情報取得手段は、自車両のウインカの作動状況を示すウインカ情報を取得する。そして、第2条件判定手段は、自車両から交差点までの距離が所定値以内の条件下において自車両のウインカが左右何れかの方向を指示する作動状態である場合、当該交差点の位置を始点に自車両の現在の進行方位にウインカの指示方向を加えた方向に向けて延びる仮想進路上を先行する周辺車両を先行車両として特定する。
【0035】
交差点のすぐ手前でウインカを作動させている場合、その交差点でウインカの点灯方向へ方向転換することが予想できる。そこで、自車両から交差点までの距離とウインカの作動状況に応じて予測される方向転換先の進路上に存在する周辺車両を先行車両として特定することで、自車両の走行に影響を与える可能性の高い先行車両を第2条件判定手段による判定の対象として抽出することができる。その結果として、先行車両の現状に即してアイドリングストップの可否を的確に判断できる。
【0036】
一方、自車両が走行する予定の経路が決まっている場合、請求項15に記載のようにすることが考えられる。すなわち、周辺車両情報取得手段は、周辺車両の現在位置及び進行方位を示す位置方位情報を含む周辺車両情報を取得する。そして、第2条件判定手段は、自車両が走行する予定の経路である走行予定経路に関する経路情報を取得し、この経路情報で示される走行予定経路と、周辺車両情報取得手段により取得した位置方位情報で示される周辺車両の現在位置及び進行方位とに基づき、走行予定経路上を先行する周辺車両を先行車両として特定する。
【0037】
ここでいう走行予定経路は、例えばナビゲーション装置において探索された目的地までの推奨経路や、走行履歴として記録された過去の走行経路、通勤や帰宅等の日常よく通行する経路等である。予め判っている走行予定経路上に存在する周辺車両を先行車両として特定することで、自車両の走行に影響を与える可能性の高い先行車両を第2条件判定手段による判定の対象として抽出することができる。その結果として、先行車両の現状に即してアイドリングストップの可否を的確に判断できる。
【図面の簡単な説明】
【0038】
【図1】アイドリングストップ制御装置1の概略構成を示すブロック図である。
【図2】周辺車両データの具体的内容を示す説明図である。
【図3】自車両データの具体的内容を示す説明図である。
【図4】第1条件判定処理の手順を示すフローチャートである。
【図5】第2条件判定処理の手順を示すフローチャートである。
【図6】アクセル開度に対する時間重み及び距離重みの付与例を示す説明図である。
【図7】第2条件判定処理の変形例を示すフローチャートである。
【図8】アイドリングストップ制御装置1の変形例を示すブロック図である。
【図9】第2条件判定処理の変形例を示すフローチャートである。
【図10】アイドリングストップ制御装置1の変形例を示すブロック図である。
【図11】第2条件判定処理の変形例を示すフローチャートである。
【図12】第2条件判定処理の変形例を示すフローチャートである。
【図13】アイドリングストップ制御装置1の変形例を示すブロック図である。
【図14】第2条件判定処理の変形例を示すフローチャートである。
【図15】第2条件判定処理の変形例を示すフローチャートである。
【発明を実施するための形態】
【0039】
以下、本発明の一実施形態を図面に基づいて説明する。なお、本発明は下記の実施形態に何ら限定されるものではなく様々な態様にて実施することが可能である。
[アイドリングストップ制御装置の構成の説明]
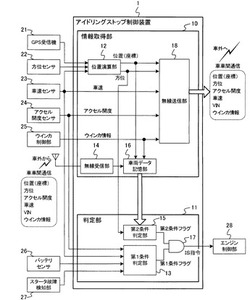
まず、図1に基づいて実施形態のアイドリングストップ制御装置1の構成を説明する。アイドリングストップ制御装置1は、内燃エンジンを動力とする車両に搭載され、この車両に設けられたGPS受信機21、方位センサ22、車速センサ23、アクセル開度センサ24、ウインカ制御部25、バッテリセンサ26、スタータ故障検知部27、エンジン制御部28等の各機器と通信可能に接続されている。
【0040】
アイドリングストップ制御装置1に接続している各部構成について説明する。GPS受信機21は、GPS衛星からの測位信号に基づいて自車両の現在位置を測位するための装置である。方位センサ22は、ジャイロスコープにより自車両の角速度を検知し、そこから自車両の進行方位を検知するための装置である。車速センサ23は、自車両の速度を検知するための装置である。アクセル開度センサ24は、自車両のアクセルペダルの踏み込み量(すなわち、アクセル開度)を検知するための装置である。ウインカ制御部25は、方向指示器(ウインカ)の作動制御を行う装置であり、ウインカの作動状況を示すウインカ情報をアイドリングストップ制御装置1に入力する。バッテリセンサ26は、自車両に搭載されているバッテリの状態(電圧、充電率等)を検知し、その検知結果をアイドリングストップ制御装置1に入力する装置ための装置である。スタータ故障検知部27は、エンジンを始動させるためのスタータの故障を検知し、その検知結果をアイドリングストップ制御装置1に入力する装置ための装置である。エンジン制御部28は、エンジン運転における、始動・停止制御、燃料制御、点火制御、動弁制御、給排気制御等の各種制御を総合的に行うための装置である。
【0041】
一方、アイドリングストップ制御装置1は、CPU、ROM、RAM、通信機器等からなるコンピュータ装置で構成されており、そのコンピュータ装置により実現する機能的構成として情報取得部10と判定部11とを備える。
【0042】
このうち情報取得部10は、アイドリングストップの実施の可否を判定するために必要な内外の情報を取得及び記憶するための構成であり、位置演算部12、無線受信部14、車両データ記憶部16、及び無線送信部18を備える。位置演算部12は、GPS受信機21、方位センサ22、車速センサ23の各種センサ類による検出信号に基づき、周知の演算方法により自車両の現在位置(座標値)及び進行方位を演算する。現在位置の演算結果は車両データ記憶部16及び無線送信部18へ出力され、進行方位の演算結果は無線送信部18及び判定部11の第2条件判定部15へ出力される。
【0043】
無線受信部14は、通信装置を搭載する周辺車両や路側に設置された通信装置(路側機)から無線通信により情報を取得するための通信装置である。図1に示す実施例では、自車両周辺の他車両から車車間通信によって、当該周辺車両の現在における位置(座標)、進行方位、アクセル開度、車速、ウインカ情報と、当該周辺車両の車両識別番号(VIN:Vehicle Identification Number)等を含む周辺車両データを受信する。この周辺車両データは、各車両から例えば100ms周期で繰返し送信される。無線受信部14により受信した周辺車両データは車両データ記憶部16へ出力され、そこでVIN別に取得順の時系列で記憶される。
【0044】
車両データ記憶部16は、RAM等の記憶素子により構成され、車車間通信により取得した周辺車両データと、各種センサ類から取得した自車両に関する自車両データとを記憶する。この車両データ記憶部16には、現在から過去の一定期間に受信した周辺車両データが周辺車両のVINごとに取得順の時系列で記録された周辺車両データベース(図2参照)として格納されている。また、情報取得部10において例えば100ms周期で取得した自車両の現在位置(座標値)、進行方位、及びウインカ情報等を含む自車両データが取得順の時系列で記録された自車両データベース(図3参照)として格納されている。車両データ記憶部16に格納される周辺車両データ及び自車両データのより詳細な内容については後述する。
【0045】
無線送信部18は、位置演算部12から入力される自車両の現在位置(座標値)、進行方位、車速センサ23から入力される自車両の速度、アクセル開度センサ24から入力されるアクセル開度、ウインカ制御部25から入力されるウインカ情報、及び、自車両の車両識別番号(VIN)を含む車両データを、車車間通信により周辺車両に対して送信する。これにより、自車両周辺の車両において自車両に関する情報を周辺車両データとして取得できる。なお、車両データの送信は例えば100ms周期で行う。
【0046】
なお、無線受信部14及び無線送信部18による無線通信に用いる通信様式としては、例えばETC(登録商標)システム等で用いられる狭域通信(DSRC)や、VICS(登録商標)等で用いられる電波ビーコン等の技術を用いることが考えられる。あるいは、日本国において、2011年(予定)のアナログテレビ放送の終了後に利用区分が再編される予定の700MHz帯の電波を利用することも考えられる。この700MHz帯の電波は、DSRCで用いられる5.8GHz帯の電波と比較して波長が長いため、回折を起こし易い。そのため、建築物が密集する都市部において、建物の影からでも良好に通信が行うことができる。
【0047】
一方、判定部11は、車両の内外から取得した情報に基づいてアイドリングストップの実施の可否を判定するため構成であり、第1条件判定部13、第2条件判定部15、及びこれらの判定結果からアイドリングストップ指令(以下、IS指令)を出力するIS指令出力部17を備える。第1条件判定部13は、車速センサ23、アクセル開度センサ24、バッテリセンサ26、及びスタータ故障検知部27の各センサ類からの検知情報に基づく自車両の状態を判定要素にして、アイドリングストップを実施可能とするための自車両の都合に関する第1条件が成立するか否かを判定する(第1条件判定処理)。そして、その判定結果を示す第1条件フラグをIS指令出力部17へ出力する。第1条件フラグは、第1条件が成立している状態を「1」の値で表し、第1条件が成立していない状態を「0」の値で表す。この第1条件判定処理のより詳しい説明については後述する。
【0048】
第2条件判定部15は、位置演算部12から自車両の進行方位を示す情報を取得すると共に、車両データ記憶部16に格納されている周辺車両データベース及び自車両データベースを参照し、これらの情報に基づく周辺車両状況を判定要素にして、アイドリングストップを実施可能とするための周辺車両の都合に関する第2条件が成立するか否かを判定する(第2条件判定処理)。そして、その判定結果を示す第2条件フラグをIS指令出力部17へ出力する。第2条件フラグは、第2条件が成立した状態を「1」の値で表し、第2条件が成立していない状態を「0」の値で表す。この第2条件判定処理のより詳しい説明については後述する。
【0049】
IS指令出力部17は、第1条件判定部13及び第2条件判定部15からそれぞれ出力される第1条件フラグ及び第2条件フラグの論理積を演算し、その演算結果をIS指令として出力する。すなわち、第1条件判定部13により第1条件が成立した(第1条件フラグ=1)と判定され、かつ、第2条件判定部15により第2条件が成立した(第2条件フラグ=1)と判定された場合に、エンジン制御部28に対してアイドリングストップを許可する旨のIS指令(ここでは「1」の値)が出力される。そして、エンジン制御部28は、判定部11のIS指令出力部17からアイドリングストップを許可する旨のIS指令を受信するとエンジンのアイドリングを停止する。
【0050】
[周辺車両データの説明]
つぎに、車両データ記憶部16に格納されている周辺車両データベースの詳細な内容について図2を参照しながら説明する。
【0051】
図2(a)に示すように、周辺車両データベースは、周辺車両1台分のレコードが複数の車両データの集合で記録され、そのレコードが複数車両分まとまって構成されたものである。そして、周辺車両1台分のレコードは、その車両の車両識別番号VINに対応付けて行番号(row)により番号付けされている。
【0052】
周辺車両1台分のレコードには、該当車両の車両データが取得時刻の新しい順に時系列で並んで記録されており、時刻の新しい順に列番号(column)により番号付けされている。つまり、この周辺車両データベースにおいてはcolumn=1のフィールドに割当てられている車両データがその車両の中で最新のデータとなり、末番のcolumnのフィールドに割当てられている車両データがその車両の中で最古のデータとなる。
【0053】
個々の車両データのフィールドには、その車両データを取得した時刻、当該車両の位置座標、進行方位、速度、ウインカの作動状況を示すウインカ情報の各情報が含まれている。なお、車両データを取得した時刻は、アイドリングストップ制御装置1に内蔵された時計手段(図示なし)や他の機器の時計手段(図示なし)から取得した時刻を記録する。あるいは、無線受信部14を介して受信した周辺車両データに含まれる送信時刻、すなわち送信元の周辺車両側で記録した時刻を用いてもよい。
【0054】
また、アクセル開度については、無線受信部14を介して受信した元の周辺車両データにおいて0%(全閉)〜100%(全開)の数値で表されているものを、車両データ記憶部16に記録する際に「1(全閉=オフ)」又は「0(0%より大=オン)」と2値化して記録しておく。このようにすることでメモリ容量を節約できる。また、ウインカ情報については、ウインカの作動状況を「左点灯」、「右点灯」、「無点灯」の何れかの状態を表す規定の数値が記録される。
【0055】
図2(a)に示す周辺車両データベースを保有している状態において、車車間通信によって車両A(VIN=A)から最新の車両データを受信したという想定で説明をする。この場合、図2(b)に示すように、新たに取得した車両データに取得時刻tnを追加したものを、VIN=Aの車両に該当するレコードのcolumn=1のフィールドに記録する。このとき、このレコードの既存の車両データについては後尾側のcolumnへ1つずつシフトする。このようにして、各周辺車両からおよそ100ms周期でそれぞれ送信される車両データを受信する度に、各周辺車両の時系列の車両データが蓄積されていく。
【0056】
[自車両データの説明]
つぎに、車両データ記憶部16に格納されている自車両データベースの詳細な内容について図3を参照しながら説明する。
【0057】
図3(a)に示すように、自車両データベースは、自車両に関する車両データの集合で構成されたものである。この自車両データベースは、自車両の車両データが取得時刻の新しい順に時系列で並んで記録されており、時刻の新しい順に列番号(column)により番号付けされている。つまり、この自車両データベースにおいてはcolumn=1のフィールドに割当てられている車両データが最新のデータとなり、末番のcolumnのフィールドに割当てられている車両データが最古のデータとなる。
【0058】
個々の車両データのフィールドには、その車両データを取得した時刻、自車両の位置座標、ウインカの作動状況を示すウインカ情報の各情報が含まれている。なお、車両データを取得した時刻は、アイドリングストップ制御装置1に内蔵された時計手段(図示なし)や他の機器の時計手段(図示なし)から取得した時刻を記録する。また、ウインカ情報については、ウインカの作動状況を「左点灯」、「右点灯」、「無点灯」の何れかを表す何れかの状態を表す規定の数値が記録される。
【0059】
図3(a)に示す自車両データベースを保有している状態において、位置演算部12及びウインカ制御部25から最新のデータを受信したという想定で説明をする。この場合、図3(b)に示すように、新たに取得した車両データに取得時刻tnを追加したものをcolumn=1のフィールドに記録する。このとき、既存の車両データについては後尾側のcolumnへ1つずつシフトする。このようにして、各センサ類からおよそ100ms周期でデータを取得する度に、自車両に関する時系列の車両データが蓄積されていく。
【0060】
[第1条件判定処理の説明]
つぎに、判定部11の第1条件判定部13が実行する第1条件判定処理の手順について、図4のフローチャートを参照しながら説明する。この第1条件判定処理は、例えば100msごとに繰返し実行される。
【0061】
第1条件判定部は、まず、第1条件の成否を示す第1条件フラグの値を「0(不成立)」にセットする(S100)。つぎに、車速センサ23、アクセル開度センサ24、バッテリセンサ26及びスタータ故障検知部27の各センサ類からの検知情報に基づいて、所定の第1条件が成立するか否かを判定する(S101)。
【0062】
本実施形態では、第1条件として、バッテリ電圧>規定値、かつ、スタータ回路正常、かつ、速度<20km/h、かつ、アクセル開度=0(全閉)、という条件を採用している。これは、今エンジンを停止しても安全が確保されるか(車速が規定値未満か)、エンジンを停止して再始動が可能か(バッテリ電圧が規定値より大きいか、スタータが故障していないか)、運転者がエンジン停止を希望しているか(アクセルをオフにしているか)といった観点で採用される条件である。なお、第1条件としてどのような条件を採用するかについては設計事項であり、環境負荷や安全性への配慮、車両の特性等に応じて適切な条件を選択できる。
【0063】
S101の判定の結果、第1条件が成立した場合(S101:YES)、第1条件フラグの値を「1(成立)」にセットし(S102)、本処理を終了する。一方、S101の判定の結果、第1条件が不成立である場合(S101:NO)、第1条件フラグを「0(不成立)」にセットしたまま本処理を終了する。そして、第1条件判定処理による判定で設定された第1条件フラグの値はIS指令出力部17へ出力される。
【0064】
[第2条件判定処理(第1実施形態)の説明]
つぎに、判定部11の第2条件判定部15が実行する第2条件判定処理(第1実施形態)の手順について、図5のフローチャートを参照しながら説明する。この第2条件判定処理は、例えば100msごとに繰返し実行される。
【0065】
第2条件判定部15は、まず、S200で初期化処理を行う。具体的には、第2条件の成否を示す第2条件フラグの値を「0(不成立)」にセットし、かつ、第2条件の成否を判定するための指標であるアクセル度の値を「0」にセットし、かつ、アクセル度の演算対象となった周辺車両の数を示す判定台数のカウンタを「0」にセットする。
【0066】
つぎに、アクセル度の演算の対象となる周辺車両(以下、選択車両と称する)を示すカウンタであるrowの値を1にセットする(S201)。このカウンタrowの値は、周辺車両データベース(図2参照)の行番号と対応しており、このカウンタrowの値が1のときは、周辺車両データベースの行番号(row)が1のレコードに記録されている車両(図2の事例では、VIN:Aの車両)が選択車両に該当する。
【0067】
つぎに、この選択車両が現時点において自車両の進路前方に存在する先行車両に該当するか否かを判定する(S202)。具体的には、自車両の現在位置の座標及び進行方位と、周辺車両データベースにおける当該選択車両の最新時刻(すなわち、column=1)の車両データに含まれる位置座標及び進行方位を用いて判定する。自車両と選択車両とが同一進路上であると判定する条件は、自車両の現在位置から進行方位前方に向けて伸びる所定幅の仮想道路上に選択車両が存在し、かつ、自車両の進行方位と選択車両の進行方位との差が規定値以下となっていることである。
【0068】
S202で選択車両が先行車両に該当すると判定した場合(S202:YES)、S203の処理へ進み、以下、この選択車両を対象にアクセル度の演算を行う。一方、選択車両が先行車両に該当しないと判定した場合(S202:NO)、この選択車両についてはアクセル度の演算を行わず、そのままS210の処理へ移行する。
【0069】
選択車両が先行車両に該当する場合に進むS203では、アクセル度の演算の対象となる車両データの時刻(以下、選択時刻と称する)を示すカウンタであるcolumnの値を1にセットする。このカウンタcolumnの値は、周辺車両データベースの列番号と対応しており、このカウンタcolumnの値が1のときは、周辺車両データベースの列番号(column)が1のフィールドに記録されている選択車両の車両データがアクセル度の演算の対象となる。
【0070】
つぎに、S204では、カウンタrowの値及びカウンタcolumnの値に該当の速度の情報を周辺車両データベースから取得し、この選択車両の選択時刻における速度が20km/h未満であるか否かを判定する。ここで選択車両の選択時刻における速度が20km/h未満であると判定した場合(S204:YES)、S206の処理へ進み、この選択時刻を対象にアクセル度の演算を行う。一方、選択車両の選択時刻における速度が20km/h以上であると判定した場合(S204:NO)、この選択車両についてはアクセル度の演算を行わず、そのままS207の処理へ移行する。
【0071】
選択車両の選択時刻における速度が20km/h未満である場合に進むS206では、下記式(1)によりアクセル度を演算する。アクセル度は、選択時刻におけるアクセル開度の値に対して選択時刻の新旧に関する時間重み及び選択車両と自車両との距離に関する距離重みによる加重計算をしたものを積算した値である。
【0072】
【数1】

【0073】
なお、上記式(1)において、右辺第1項は従前のアクセル度の値である。また、右辺第2項の分子であるアクセル開度の値は、周辺車両データベースにおけるカウンタrowの値及びカウンタcolumnの値に該当の車両データから取得するものであり、1(アクセルオフ)又は0(アクセルオン)の何れかの値を示す。
【0074】
また、右辺第2項の分母のcolumnは、カウンタcolumnの値であり、時間重みに相当する値である。このcolumnの値が大きい、すなわち選択時刻が古い程、アクセル度に加算される右辺第2項のアクセル開度の値が小さく補正されるようになっている。これは、時刻が古い程、情報の確度が低いためである。
【0075】
また、右辺第2項の分母の選択時刻における選択車両と自車両との距離は、距離重みに相当する値である。選択車両と自車両との距離は、周辺車両データベースから取得した選択車両の選択時刻における位置座標と、この選択時刻に該当の周辺車両データ内にある実際の時刻情報に対応する自車両の位置座標(自車両データベース(図3参照)から取得)との差から算出されるものである。選択時刻における選択車両と自車両との距離が大きい程、アクセル度に加算される右辺第2項のアクセル開度の値が小さく補正されるようになっている。これは、選択車両が自車両から遠い程、情報の確度が低いためである。
【0076】
つぎに、S207では、カウンタcolumnの値が規定の閾値thCに到達しているか否かを判定する。すなわち、ここでは選択車両に関するアクセル度の演算が規定の時間分だけ行われたか否かを判定している。カウンタcolumnの値が規定の閾値thCに到達していない場合(S207:NO)、S208でカウンタcolumnの値を1つカウントアップし、S204の処理へ戻る。以下、同じ選択車両の次の選択時刻を対象にアクセル度の演算を行う。
【0077】
ここで、時間重み及び距離重みを考慮したアクセル開度の概念について、図6の図表を参照しながら説明する。図6(a)は、周辺車両データベースにおけるある選択車両のアクセル開度の時系列のグラフである。アクセル開度は、「1(全閉)」又は「0(開)」の何れかの値で示される。また、図6(b)は、(a)のグラフと同じ車両の同時間帯における速度の時系列のグラフである。
【0078】
アクセル度は、選択車両の速度が20km/h未満のときのアクセル開度のサンプルのみを抽出して積算することになっている。また、時間重みは、サンプルの時刻が古い程、そのときのアクセル開度の値が小さくなるように加重される。これらの条件を反映したアクセル開度/時間重みの時系列のグラフを図6(c)に示す。また、このグラフの下側に各時刻における当該選択車両と自車両との距離を付記する。
【0079】
距離重みは、自車両からの距離が遠い程、そのときのアクセル開度の値が小さくなるように加重される。この条件を反映したアクセル開度/時間重み/距離重みの時系列のグラフを図6(d)に示す。そして、このグラフに示す各サンプルの値を積算したものが、当該選択車両のアクセル度になる。
【0080】
図5のフローチャートの説明に戻る。S207でカウンタcolumnの値が規定の閾値thCに到達したと判定した場合(S207:YES)に進むS209では、判定台数の値を1つカウントアップする。つぎに、S210では、カウンタrowの値が規定の閾値thRに到達しているか否かを判定する。なお、閾値thRは、車両データ記憶部16に格納されている周辺車両データベースにおける行番号rowの最大値とする。すなわち、ここでは周辺車両データベースに登録されている全ての周辺車両についてアクセル度の演算が済んだか否かを判定している。
【0081】
カウンタrowの値が規定の閾値thRに到達していない場合(S210:NO)、S211でカウンタrowの値を1つカウントアップし、S202の処理へ戻る。以下、次の選択車両を対象にアクセル度の演算を行う。
【0082】
上述のように、S202〜S211の処理を選択車両ごとに順次繰返すことで、複数の周辺(先行)車両についてアクセル度を積算する。このようにして演算されるアクセル度は、下記式(2)の如く表される。
【0083】
【数2】
【0084】
なお、上記式(2)において、時間重みωt(VIN,t)は、車両データの取得時刻が古い程、値が小さくなる関数である。また、距離重みωd(VIN,t)は、その時刻における自車両との距離が遠い程、値が小さくなる関数である。
【0085】
そして、S210でカウンタrowの値が規定の閾値thRに到達したと判定した場合(S210:YES)、すなわち、周辺車両データベースに登録されている全ての周辺車両についてアクセル度の演算が済んだ場合、S212の処理へ移行する。S212では、現在のアクセル度の値を判定台数の値で除することで、周辺(先行)車両1台あたりの平均アクセル度の値を算出する。この平均アクセル度は、周辺(先行)車両がアイドリングストップ可能な低速度(例えば20km/h)で、かつアクセルをオフにしている傾向度合を示す指標である。この値が大きい程、周辺(先行)車両が低速度でアクセルをオフにしている傾向が強い、すなわち、交通流が停滞する傾向が強く、より長いアイドリングストップ期間を確保できる状況であることを示している。
【0086】
次のS213では、S212で算出した平均アクセル度が規定の閾値thAより大きいか否かを判定する。この閾値thAは、例えば、燃費の向上が可能な所定時間以上のアイドリングストップを継続できると見込まれる程度の平均アクセル度の値とすることが考えられる。S213の判定の結果、平均アクセル度が規定の閾値thAより大きい場合(S213:YES)、すなわち、周辺(先行)車両が低速度でアクセルをオフにしている傾向が規定よりも強い場合、第2条件フラグの値を「1(成立)」にセットし(S214)、本処理を終了する。一方、S213の判定の結果、平均アクセル度が規定の閾値thA以下である場合(S213:NO)、すなわち、周辺(先行)車両が低速度でアクセルをオフにしている傾向が規定よりも弱い場合、第2条件フラグを「0(不成立)」にセットしたまま本処理を終了する。そして、第2条件判定処理による判定で設定された第2条件フラグの値はIS指令出力部17へ出力される。
【0087】
[効果]
上記実施形態のアイドリングストップ制御装置1によれば、次のような効果を奏する。
自車両の進路前方を走行する先行車両から受信した情報に基づき、アイドリングストップ可能な車速(例えば20km/未満)においてアクセルオフにしている傾向度合を示すアクセル度を算出できる。そして、その算出したアクセル度に基づいてアイドリングストップの可否を判断できる。このようにすることで、自車両の状態を判定要素とするアイドリングストップの実施要件(第1条件)だけでなく、周辺(先行)車両の状態を判定要素とするアイドリングストップの実施要件(第2条件)を加味して、アイドリングストップの可否を的確に判断できる。
【0088】
よって、従来技術のように「前回の発進から車速が規定速度以上にならなければアイドリングストップが実施されない(車速履歴条件)」といった条件を用いる必要がない。また、第2条件では、周辺(先行)車両が低速度でアクセルをオフにしている傾向、すなわち、交通流が停滞する傾向を考慮し、十分な停止時間を確保できると見込まれる状況でアイドリングストップを許可するため、渋滞時にエンジンの停止及び再始動が頻繁に行われるのを防止できる。
【0089】
また、従来技術のような車速履歴条件を満たしていない走行状況であったとしても、第2条件が成立する条件下、すなわち、交通流が停滞する傾向が強い場合であれば、アイドリングストップが実施される。これにより、従来技術の問題点として挙げた「前回からの発進から車速が規定速度まで上がりきらないまま停止すると、その後の停止時間が長かった(所定時間A以上のアイドリングストップが可能であった)としてもアイドリングストップが実施されない」といった不都合を解決できる。
【0090】
また、比較的軽度の渋滞の中を走行中に、アイドリングストップの規定速度付近の速度を出しながら頻繁に発停止を繰返す(アクセルオン/オフを繰返す)ような状況では、周辺(先行)車両も同様の挙動をしているため、それらのアクセル度の値は必然的に低く算出されることになる。よって、このような状況下では第2条件が成立しないため、燃費の向上が見込まれない短時間のアイドリングストップを実施しないようにできる。
【0091】
[第2実施形態]
図7は、第2条件判定処理の変形例(第2実施形態)の手順を示すフローチャートである。なお、図7のフローチャートにおいては、図5に示す第1実施形態のフローチャートから変更のある部分を主に記載し、変更のない共通部分については記載を省略している。また、図7のフローチャートにおいてステップ番号が図5のフローチャートと同一の処理については、特に説明しない限りは同一の処理内容であるものとして扱い、同じ説明は繰返さない。
【0092】
第2実施形態の第2条件判定処理では、S204の処理の後にS301,S302の処理が追加された点で第1実施形態の第2条件判定処理と異なる。すなわち、S204で選択車両の選択時刻における速度が20km/h未満であると判定した場合(S204:YES)、S301の処理へ移行し、この選択時刻において選択車両のウインカの作動状況が同時期における自車両のウインカの作動状況と一致していたか否かを判定する。なお、選択車両のウインカの作動状況は、この選択時刻に該当の周辺車両データ内にあるウインカ情報に基づいて特定する。また、自車両のウインカの作動状況は、この選択時刻に該当の周辺車両データ内にある実際の時刻情報に対応する自車両のウインカ情報(自車両データベース(図3参照)から取得)に基づいて特定する。
【0093】
そして、S301で選択車両のウインカの作動状況と自車両のウインカ作動状況とが一致しないと判定した場合(S301:NO)、S302の処理へ移行し、下記式(3)によりアクセル度を演算する。ここでのアクセル度の算出は、選択時刻におけるアクセル開度の値に対して、第1実施形態と同様の時間重み及び距離重みに加え、更にウインカの作動状況に関するウインカ作動重みを加重計算した値を積算することで行われる。
【0094】
【数3】
【0095】
なお、上記式(3)において、右辺第3項にて乗じられる「1/2」の値が、ウインカ作動重みに相当する値である。例えば、自車両のウインカが点灯していないときに周辺(先行)車両のウインカが点灯している場合、その周辺(先行)車両は、自車両の進路上から逸れて自車両の走行状態に関与しなくなる可能性が高く、この車両の情報の確度は低いものとなる。そこで、周辺(先行)車両のウインカの作動状況と自車両のウインカの作動状況とが一致しない場合には、アクセル度の重み付けを軽くする(ここでは、アクセル開度に1より小さい数値を乗じる)ことで、この車両のアクセル開度の影響度合を小さくできる。
【0096】
一方、S301で選択車両のウインカの作動状況と自車両のウインカ作動状況とが一致すると判定した場合場合(S301:YES)、S206の処理へ移行する。この場合、第1実施形態と同様に上記式(2)によりアクセル度を演算する。
【0097】
[第3実施形態]
図8は、アイドリングストップ制御装置1の変形例(第3実施形態)の概略構成を示すブロック図である。なお、図8のブロック図において、図1に示す第1実施形態のブロック図と同一の符号を付した構成については、特に説明しない限りは同一のものとして扱い、同じ説明は繰返さない。
【0098】
第3実施形態のアイドリングストップ制御装置1は、判定部11の第2条件判定部15が自車両に搭載されたナビゲーションECU29から走行予定経路情報を取得し、これに基づいてアクセル度の判定対象となる先行車両を特定する点で、第1実施形態のアイドリングストップ制御装置1と異なる。
【0099】
ナビゲーションECU29は、道路地図データに基づいて現在位置から目的地までの推奨経路を探索し、その探索した推奨経路に従って走行案内をする周知のナビゲーションシステムを構成する電子制御装置である。ナビゲーションECU29から第2条件判定部15へ入力される走行予定経路情報は、目的地までの推奨経路を示す情報を用いることが考えられる。あるいは、ナビゲーションECU29において目的地までの推奨経路が設定されていない場合には、ナビゲーションECU29のメモリに走行履歴として記録されている過去の走行経路や、通勤や帰宅等の日常よく通行する経路等を示す情報も、走行予定経路情報として利用可能である。
【0100】
図9は、上記第3実施形態のアイドリングストップ制御装置1の第2条件判定部15において実行される第2条件判定処理(第3実施形態)の手順を示すフローチャートである。なお、図9のフローチャートにおいては、図5に示す第1実施形態のフローチャートから変更のある部分を主に記載し、変更のない共通部分については記載を省略している。また、図9のフローチャートにおいてステップ番号が図5のフローチャートと同一の処理については、特に説明しない限りは同一の処理内容であるものとして扱い、同じ説明は繰返さない。
【0101】
第3実施形態の第2条件判定処理では、第1実施形態のS202の処理に代えて新たにS401の処理が追加された点で第1実施形態の第2条件判定処理と異なる。このS401では、選択車両が自車両前方の予定走行経路上に存在する先行車両に該当するか否かを判定する。
【0102】
具体的には、ナビゲーションECU29から取得した予定走行経路情報と、周辺車両データベース(図2参照)の当該選択車両の最新時刻(すなわち、column=1)の車両データに含まれる位置座標及び進行方位を用いて判定する。予定走行経路上に存在する先行車両に該当すると判定する条件は、選択車両の位置座標が予定走行経路上に存在し、かつ、その予定走行経路の形状に沿った方位と選択車両の進行方位との差が規定値以下となっていることである。
【0103】
S401で選択車両が自車両前方の予定走行経路上に存在する先行車両に該当すると判定した場合(S401:YES)、S203の処理へ進み、以下、この選択車両を対象にアクセル度の演算を行う。一方、選択車両が自車両前方の予定走行経路上に存在する先行車両に該当しないと判定した場合(S401:NO)、この選択車両についてはアクセル度の演算を行わず、そのままS210の処理へ移行する。
【0104】
上述のとおり、ナビゲーションECU29から取得できる予め判っている経路上に存在する周辺車両を先行車両として特定することで、自車両の走行に影響を与える可能性の高い先行車両をアクセル度の判定対象として抽出することができる。例えば、図9の吹き出し枠に記載のとおり、自車両の走行予定経路上に存在する他車両のみがアクセル度の判定対象となり、たとえ、自車両の前方を走行する車両であっても、この走行予定経路上に存在しない他車両はアクセル度の判定対象から除外される。
【0105】
[第4実施形態]
図10は、アイドリングストップ制御装置1の変形例(第4実施形態)の概略構成を示すブロック図である。なお、図10のブロック図において、図1に示す第1実施形態のブロック図と同一の符号を付した構成については、特に説明しない限りは同一のものとして扱い、同じ説明は繰返さない。
【0106】
第4実施形態のアイドリングストップ制御装置1は、情報取得部10の無線受信部14が、路側に設置された無線通信装置(路側機)との路車間通信により進路前方の交差点に関するインフラ情報を取得し、判定部11の第2条件判定部15がこのインフラ情報と自車両のウインカの作動状況とに基づいてアクセル度の判定対象となる先行車両を特定する点で、第1実施形態のアイドリングストップ制御装置1と異なる。
【0107】
アイドリングストップ制御装置1にインフラ情報を提供する路側機は、交差点等に付随して道路近傍に設置される無線通信装置であり、当該交差点の位置情報や交通信号機に関する信号情報を含むインフラ情報を、付近を走行する車両に対して送信する。このうち、交差点の位置情報には、例えば位置座標や当該地点から交差点までの残り距離等を示す情報が含まれる。
【0108】
図11は、上記第4実施形態のアイドリングストップ制御装置1の第2条件判定部15において実行される第2条件判定処理(第4実施形態)の手順を示すフローチャートである。なお、図11のフローチャートにおいては、図5に示す第1実施形態のフローチャートから変更のある部分を主に記載し、変更のない共通部分については記載を省略している。また、図11のフローチャートにおいてステップ番号が図5のフローチャートと同一の処理については、特に説明しない限りは同一の処理内容であるものとして扱い、同じ説明は繰返さない。
【0109】
第4実施形態の第2条件判定処理では、S201の処理の後にS501,S502の処理が追加された点で第1実施形態の第2条件判定処理と異なる。S501では、自車両の現在位置から進路前方の交差点までの距離が30m以内であり、かつ、自車両のウインカが作動しているか否かを判定する。なお、自車両の現在位置から交差点までの距離は、車両データ記憶部16の自車両データベース(図3参照)における最新時刻(すなわち、column=1)の車両データに含まれる位置座標と、無線受信部14による路車間通信で取得したインフラ情報で示される交差点の位置とに基づいて特定する。また、自車両のウインカの作動状況は、車両データ記憶部16の自車両データベースにおける最新時刻(すなわち、column=1)の車両データに含まれるウインカ情報に基づき特定する。
【0110】
S501で自車両の現在位置から進路前方の交差点までの距離が30m以内であり、かつ、自車両のウインカが作動していると判定した場合(S501:YES)、S502の処理へ移行し、否定判定をした場合(S501:NO)、S202の処理へ移行する。S502では、選択車両が現時点において自車両の進行方位にウインカの指示方向を加えた仮想進路上に存在する先行車両に該当するか否かを判定する。具体的には、自車両の現在位置から前方交差点までの進路と、この交差点の位置を始点として自車両の進行方位にウインカの指示方向を加算した角度の進路とを併せた仮想進路を設定して判定を行う。仮想進路上に存在する先行車両に該当すると判定する条件は、選択車両の位置座標がこの仮想進路上に存在し、かつ、その仮想進路の形状に沿った方位と選択車両の進行方位との差が規定値以下となっていることである。
【0111】
S501で選択車両が自車両前方の仮想進路上に存在する先行車両に該当すると判定した場合(S501:YES)、S203の処理へ進み、以下、この選択車両を対象にアクセル度の演算を行う。一方、選択車両が自車両前方の仮想進路上に存在する先行車両に該当しないと判定した場合(S501:NO)、この選択車両についてはアクセル度の演算を行わず、そのままS210の処理へ移行する。
【0112】
上述のとおり、交差点から所定範囲内(例えば手前30m以内)でウインカが作動していることを条件に自車両が交差点で方向転換する方向を特定し、その方向転換先の進路を加味した仮想進路上に存在する周辺車両を先行車両として特定することで、自車両の走行に影響を与える可能性の高い先行車両をアクセル度の判定対象として抽出することができる。また、ウインカが作動しているという条件に加え、現在位置が交差点から所定範囲内(例えば手前30m以内)という条件を含むため、交差点での方向転換とは関係なく単に車線変更や停車するときに行われるウインカの作動と区別できる。これは、交差点で
[第5実施形態]
図12は、第2条件判定処理の変形例(第5実施形態)の手順を示すフローチャートである。なお、図12のフローチャートにおいてステップ番号が図5のフローチャートと同一の処理については、特に説明しない限りは同一の処理内容であるものとして扱い、同じ説明は繰返さない。
【0113】
第5実施形態では、第1実施形態の第2条件判定処理で用いたアクセル度の代わりに、別の指標であるアクセルオフ度を用いて第2条件の成否を判定する点で第1実施形態の第2条件判定処理と異なる。アクセルオフ度は、過去の所定期間(例えば、現時点から10秒前までの期間)において、周辺(先行)車両が規定速度(例えば、20km/h)未満でアクセルを全閉にしていた合計時間に、自車両との距離に関する距離重みを加重したものを、各周辺(先行)車両について積算した指標である。
【0114】
なお、第5実施形態の第2条件判定処理では、第1実施形態の第2条件判定処理におけるS200の処理に代えてS601の処理が追加され、S203〜S208の処理に代えてS602〜S604の処理が追加され、S212,S213の処理に代えてS605,S606の処理が追加されている。
【0115】
第2条件判定部15は、まず、S601で初期化処理を行う。具体的には、第2条件の成否を示す第2条件フラグの値を「0(不成立)」にセットし、かつ、第2条件の成否を判定するための指標であるアクセルオフ度の値を「0」にセットし、かつ、アクセルオフ度の演算対象となった周辺車両の数を示す判定台数のカウンタを「0」にセットする。
【0116】
つぎに、アクセルオフ度の演算の対象となる選択車両を示すカウンタであるrowの値を1にセットする(S201)。そして、S202で選択車両が自車両の進路前方に存在先行車両に該当すると判定した場合(S202:YES)、S602の処理へ進み、以下、この選択車両を対象にアクセルオフ度の演算を行う。一方、選択車両が先行車両に該当しないと判定した場合(S202:NO)、この選択車両についてはアクセルオフ度の演算を行わず、そのままS210の処理へ移行する。
【0117】
選択車両が先行車両に該当する場合に進むS602では、現時点から10秒前までの期間において選択車両が速度20km/h未満でかつアクセル全閉であった合計時間を算出する。この合計時間は、周辺車両データベース(図2参照)の当該選択車両のレコードに含まれる時刻情報と、各時刻における速度情報及びアクセル開度情報とに基づいて算出する。
【0118】
つぎに、S603では、現時点から10秒前までの期間における自車両と選択車両との平均距離を算出する。この平均距離は、周辺車両データベースの当該選択車両のレコードに含まれる時刻情報及び各時刻における位置座標と、自車両データベース(図3参照)に含まれる時刻情報及び各時刻における位置座標とに基づいて算出する。
【0119】
そして、次のS604では、S602,S603における計算結果に基づき、下記式(4)によりアクセルオフ度を演算する。
【0120】
【数4】
【0121】
なお、上記式(4)において、右辺第1項は従前のアクセルオフ度の値である。また、右辺第2項の分子は、S602において算出したアクセル全閉時の合計時間である。また、右辺第2項の分母は、S603において算出した平均距離であり、距離重みに相当する値である。これにより、過去10秒間における選択車両と自車両との平均距離が大きい程、アクセルオフ度に加算される右辺第2項のアクセル全閉時の合計時間の値が小さく補正されるようになっている。これは、選択車両が自車両から遠い程、情報の確度が低いためである。
【0122】
S604でアクセルオフ度を演算した後、判定台数の値を1つカウントアップする(S209)。つぎに、S210では、カウンタrowの値が規定の閾値thRに到達しているか否かを判定する。カウンタrowの値が規定の閾値thRに到達していない場合(S210:NO)、S211でカウンタrowの値を1つカウントアップし、S202の処理へ戻る。以下、次の選択車両を対象にアクセルオフ度の演算を行い、これを選択車両ごとに順次繰返すことで、複数の周辺(先行)車両についてアクセルオフ度を積算する。
【0123】
そして、S210でカウンタrowの値が規定の閾値thRに到達したと判定した場合(S210:YES)、すなわち、周辺車両データベースに登録されている全ての周辺車両についてアクセルオフ度の演算が済んだ場合、S605の処理へ移行する。S605では、現在のアクセルオフ度の値を判定台数の値で除することで、周辺(先行)車両1台あたりの平均アクセルオフ度の値を算出する。この平均アクセルオフ度は、周辺(先行)車両がアイドリングストップ可能な低速度(例えば20km/h)で、かつアクセルをオフにしている期間の長さを示す指標である。この値が大きい程、周辺(先行)車両が低速度でアクセルをオフにしている傾向が強い、すなわち、交通流が停滞する傾向が強く、より長いアイドリングストップ期間を確保できる状況であることを示している。
【0124】
次のS606では、S605で算出した平均アクセルオフ度が規定の閾値thA´より大きいか否かを判定する。この閾値thA´は、例えば、燃費の向上が可能な所定時間以上のアイドリングストップを継続できると見込まれる程度の平均アクセルオフ度の値とすることが考えられる。
【0125】
S606の判定の結果、平均アクセルオフ度が規定の閾値thA´より大きい場合(S606:YES)、すなわち、周辺(先行)車両が低速度でアクセルをオフにしている傾向が規定よりも強い場合、第2条件フラグの値を「1(成立)」にセットし(S214)、本処理を終了する。一方、S606の判定の結果、平均アクセル度が規定の閾値thA´以下である場合(S606:NO)、すなわち、周辺(先行)車両が低速度でアクセルをオフにしている傾向が規定よりも弱い場合、第2条件フラグを「0(不成立)」にセットしたまま本処理を終了する。
【0126】
[第6実施形態]
図13は、アイドリングストップ制御装置1の変形例(第6実施形態)の概略構成を示すブロック図である。なお、図13のブロック図において、図1に示す第1実施形態のブロック図と同一の符号を付した構成については、特に説明しない限りは同一のものとして扱い、同じ説明は繰返さない。
【0127】
第6実施形態では、無線受信部14を介して、交差点の交通信号機に付随して設置されている路側機との路車間通信により交通信号機における信号の切替時期を示す信号時間情報を含むインフラ情報を取得し、このインフラ情報を第2条件判定部15における第2条件の成否の判定に利用する。さらに、第2条件判定部15における判定結果に応じて車両の自動変速機(オートマチックトランスミッション)の協調制御がなされる点が特徴的である。
【0128】
アイドリングストップ制御装置1にインフラ情報を提供する路側機は、交差点等に付随して道路近傍に設置される無線通信装置であり、当該交差点の位置情報や交通信号機の信号現示期間に関する信号時間情報を含むインフラ情報を、付近を走行する車両に対して送信する。このうち、信号時間情報には、信号の切替時期や停止信号の残り時間等を示す情報が含まれている。停止信号の残り時間とは、停止信号を現示中において現時点から次の進行信号に切替わるまでに要する時間である。例えば、停止信号の残り時間が60秒を示している場合、この情報が出力された時点で、その交差点における自車両の進路方向の交通信号機は停止信号(赤信号)を現示しており、かつ、情報が出力された時点から60秒後に進行信号(青信号)に切替わることを示している。
【0129】
図13において、回転数センサ30は、自車両のエンジンの回転数を検知するためのセンサである。また、変速機制御部31は、自車両の走行状態(車速やエンジン回転数)に応じて自動変速機の最適な変速段の決定及び切替えをする電子制御装置である。
【0130】
第2条件判定部15には、自車両の位置座標や進行方位を示す情報に加え、無線受信部14を介して受信した信号時間情報や、車速センサ23からの車速情報、エンジンの回転数を検知する回転数センサ30からのエンジン回転数情報、変速機制御部31において検知された現在選択中の変速段(以下、シフト位置)を示すシフト位置情報等が入力される。そして、第2条件判定部15からは、第2条件の成否を示す第2条件フラグに加えて、シフト位置を低速側に変更するためのダウンシフト指令を変速機制御部31に対して出力する。
【0131】
図14は、上記第6実施形態のアイドリングストップ制御装置1の第2条件判定部15において実行される第2条件判定処理(第6実施形態)の手順を示すフローチャートである。なお、図14のフローチャートにおいては、図5に示す第1実施形態のフローチャートから変更のある部分を主に記載し、変更のない共通部分については記載を省略している。また、図14のフローチャートにおいてステップ番号が図5のフローチャートと同一の処理については、特に説明しない限りは同一の処理内容であるものとして扱い、同じ説明は繰返さない。
【0132】
第6実施形態の第2条件判定処理では、S213の処理の後にS701〜S704の処理が追加された点で第1実施形態の第2条件判定処理と異なる。S213で肯定判定をした場合(S213:YES)、すなわち、平均アクセル度が第2条件の成立に必要な値を満足している場合、次のS701では、自車両の進路前方の交差点における停止信号の残り時間が規定の閾値thSよりも長いか否かを判定する。なお、停止信号の残り時間は、無線受信部14を介して受信した最新のインフラ情報に基づいて特定する。
【0133】
S701で停止信号の残り時間が閾値thSよりも長いと判定した場合(S701:YES)、S214の処理へ進み、第2条件フラグの値を「1」にセットする。一方、停止信号の残り時間が閾値thSよりも短い、あるいは現時点で停止信号が現示されていない場合(S701:NO)、第2条件フラグを「0(不成立)」にセットしたままS702の処理へ進む。
【0134】
S701で停止信号の残り時間が閾値thSよりも長いと判定されたということは、この停止信号に従って所定時間以上停車する可能性が高いことを示している。よって、この場合は、アイドリングストップを実施するのに好適な条件であるとして、第2条件成立(第2条件フラグ=1)と判定するようになっている。
【0135】
一方、S701で停止信号の残り時間が閾値thSよりも短い、あるいは現時点で停止信号が現示されていないと判定されたということは、交差点に差し掛かった時点で進行信号になっていたり、停止信号による停止時間が短い可能性が高いことを示している。よって、この場合は、アイドリングストップを実施しても燃費の向上が期待できないとして、第2条件不成立(第2条件フラグ=0)と判定する一方、次のS702以降の処理で第2条件判定部15による自動変速機の協調制御を実施することで燃費の向上を図るようになっている。
【0136】
具体的には、S702では、現在のエンジン回転数(ただし、アクセルオフであること)が規定の燃料カット回転数以上であるか否かを判定する。電子制御式の燃料噴射装置においては、通常、アクセルをオフにして惰性で走行しているときのエンジン回転数がエンジンストールしない回転数よりも高い場合には、エンジン内への燃料噴射が停止されることで無駄な燃料消費を抑えるようになっている。この燃料噴射を停止する境界となるエンジン回転数を燃料カット回転数と呼ぶ。なお、燃料カット回転数は、エンジンの回転力を動力源とする機器類(例えば、エアコンのコンプレッサー等)の作動状況や、冷間時において適宜変更されるものである。よって、S702の判定では、その時々で設定されている最新の燃料カット回転数を用いる。
【0137】
S702で現在のエンジン回転数が規定の燃料カット回転数以上であると判定した場合(S702:YES)、すなわち、エンジン内への燃料噴射が停止されている状況では、自動変速機の制御をせずに本処理を終了する。一方、S702で現在のエンジン回転数が規定の燃料カット回転数未満であると判定した場合(S702:NO、すなわち、エンジンストール防止の為に燃料噴射を行っている状況下では、S703の処理へ進む。
【0138】
S703では、現在のシフト位置が1速(最も変速比の低いギア)であるか否かを判定する。現在のシフト位置が1速である場合(S703:YES)、これ以上低いギアが存在しないため、本処理を終了する。一方、現在のシフト位置が1速よりも大きい場合(S703:NO)、シフト位置を低速側へ1段下げるダウンシフト指令を変速機制御部31に対して出力し(S704)、本処理を終了する。
【0139】
上記第6実施形態の構成によれば、周辺車両の走行状況(平均アクセル度)に加えて、インフラ情報に基づく停止信号の残り時間も考慮して、長時間の停止が見込まれる場合に第2条件が成立すると判定することで、燃費向上に貢献するアイドリングストップを的確に実施できると共に、変速機制御に係る電力消費を低減できる。
【0140】
一方、停止信号の残り時間に基づき長時間の停止が見込まれない場合、エンジン回転数が燃料カット回転数以上になるように変速機をシフトダウンさせることができる。このようにすることで、アイドリングストップが短時間しか見込めない状況下においても、積極的なシフトダウンでエンジンの回転数を高く維持することによる燃料カットで減速中における燃料消費を低減できる。
【0141】
また、このようにすることで、減速過程から再加速する状況に転向した時には、シフト位置が低速度からの加速に適した低いギアに予めなっており、再加速に対する即応性が向上する。特に、アイドリングストップによるエンジン停止状態からエンジンを始動して変速機の立ち上がり(油圧の上昇)を待つ場合に比べて、再加速する状況に転向した時点で予めエンジンが作動中で、変速機も低速ギアを選択している状態になっているため、加速を開始するまでに要する時間を低減できる。
【0142】
なお、上記第6実施形態では、変速比を段階的に切替える機構を有する自動変速機を適用した事例を挙げたが、変速比を連続的に変化させる無断変速機(CVT)を適用してもよい。その場合、S703の判断処理では、変速比が最低速であるか否かについて判断し、S704では、変速段を切替える指示に代えて変速比を下げる指示を出力するものとする。
【0143】
また、上述のS702の判断処理では、「エンジン回転数≧燃料カット回転数」という判断基準を用いているため、S702で否定判定(NO)をした時点で既に燃料噴射が行われていることになっている。これに対し、S702に「エンジン回転数≧燃料カット回転数+α(例えばα=100rpm)」という判断基準を採用すれば、減速時の燃料噴射が行われる前にS703の処理へ移行することが可能になる。このようにすることで、S702で否定判定(NO)をした時点で最も高いギアを選択していたとしても、減速過程において燃料を噴射することなく最も低いギアまでシフトダウンすることも可能となる。
【0144】
なお、上記第6実施形態の第2条件判定処理では、周辺車両のアクセル度を演算し、これを判断要素に採用する構成(第1〜4実施形態)を前提としているが、当然ながら、第5実施形態におけるアクセルオフ度を判断要素に採用する構成を前提とするように構成することもできる。
【0145】
[第7実施形態]
図15は、第2条件判定処理の変形例(第7実施形態)の手順を示すフローチャートである。なお、図15のフローチャートにおいては、図5に示す第1実施形態のフローチャートから変更のある部分を主に記載し、変更のない共通部分については記載を省略している。また、図15のフローチャートにおいてステップ番号が図5のフローチャートと同一の処理については、特に説明しない限りは同一の処理内容であるものとして扱い、同じ説明は繰返さない。
【0146】
第7実施形態の第2条件判定処理は、上述の第6実施形態の第2条件判定処理(図14参照)の手順から、変速機の協調制御に関する処理(S702〜S704)を除外したものに相当する。すなわち、第7実施形態は、無線受信部14を介して信号時間情報を含むインフラ情報を取得し、このインフラ情報を第2条件の成否の判定に利用する点で特徴的である。
【0147】
第7実施形態の第2条件判定処理では、S213の処理の後にS701の処理が追加された点で第1実施形態の第2条件判定処理と異なる。S213で肯定判定をした場合(S213:YES)、すなわち、平均アクセル度が第2条件の成立に必要な値を満足している場合、次のS701では、自車両の進路前方の交差点における停止信号の残り時間が規定の閾値thSよりも長いか否かを判定する。なお、停止信号の残り時間は、無線受信部14を介して受信した最新のインフラ情報に基づいて特定する。
【0148】
S701で停止信号の残り時間が閾値thSよりも長いと判定した場合(S701:YES)、S214の処理へ進み、第2条件フラグの値を「1」にセットする。一方、停止信号の残り時間が閾値thSよりも短い、あるいは現時点で停止信号が現示されていない場合(S701:NO)、第2条件フラグを「0(不成立)」にセットしたまま本処理を終了する。
【0149】
S701で停止信号の残り時間が閾値thSよりも長いと判定されたということは、この停止信号に従って所定時間以上停車する可能性が高いことを示している。よって、この場合は、アイドリングストップを実施するのに好適な条件であるとして、第2条件成立(第2条件フラグ=1)と判定するようになっている。
【0150】
一方、S701で停止信号の残り時間が閾値thSよりも短い、あるいは現時点で停止信号が現示されていないと判定されたということは、交差点に差し掛かった時点で進行信号になっていたり、停止信号による停止時間が短い可能性が高いことを示している。よって、この場合は、アイドリングストップを実施しても燃費の向上が期待できないとして、第2条件不成立(第2条件フラグ=0)と判定するようになっている。
【0151】
上記第7実施形態の構成によれば、周辺車両の走行状況(平均アクセル度)に加えて、インフラ情報に基づく停止信号の残り時間も考慮して、長時間の停止が見込まれる場合に第2条件が成立すると判定することで、燃費向上に貢献するアイドリングストップを的確に実施できる。
【0152】
なお、上記第7実施形態の第2条件判定処理では、インフラ情報に基づく停止信号の残り時間を第2条件の判断要素に採用する構成としたが、これに代えて、インフラ情報に基づく交差点までの距離を第2条件の判断要素に採用するように構成してもよい。具体的には、自車両の現在位置から交差点までの距離に応じて、第2条件の成否を分岐する。このようにすることで、交差点を要因とする交通流の波及度合を反映した態様にてアイドリングストップの可否を判断できる。
【0153】
[その他の実施形態]
上述した第1〜7の各実施形態は、互いに相反する技術内容でない限り適宜組合せて実施してもよい。また、アクセル度やアクセルオフ度といった周辺車両のアクセル開度に基づいた指標を用いて第2条件の成否を判定する他に、単に周辺車両の速度を指標とする第2条件を設定して、その成否を判定する構成であってもよい。
【0154】
[実施形態の構成と特許請求の範囲に記載の構成との対応]
上記実施形態のアイドリングストップ制御装置の各部構成と、特許請求の範囲に記載の構成との対応は次のとおりである。
【0155】
アイドリングストップ制御装置1の無線受信部14が、特許請求の範囲における周辺車両情報取得手段、信号情報取得手段、交差点情報取得手段、及び、距離情報取得手段に相当する。また、第1条件判定部13が第1条件判定手段に相当する。また、第2条件判定部15が、第2条件判定手段及びシフトダウン指示手段に相当する。また、IS指令出力部17がアイドリングストップ制御手段に相当する。また、車両データ記憶部16が記憶手段に相当する。また、位置演算部12が、位置情報取得部及び位置方位情報取得部に相当する。また、情報取得部10がウインカ情報取得手段に相当する。
【符号の説明】
【0156】
1…アイドリングストップ制御装置、10…情報取得部、12…位置演算部、14…無線受信部、16…車両データ記憶部、18…無線送信部、11…判定部、13…第1条件判定部、15…第2条件判定部、17…IS指令出力部、21…GPS受信機、22…方位センサ、23…車速センサ、24…アクセル開度センサ、25…ウインカ制御部、26…バッテリセンサ、27…スタータ故障検知部、28…エンジン制御部、29…ナビゲーションECU、30…回転数センサ、31…変速機制御部。
【技術分野】
【0001】
本発明は、所定のアイドリングストップ条件が成立したときに車両のエンジンのアイドリングを停止するアイドリングストップ制御装置に関する。
【背景技術】
【0002】
停車時等に一時的にエンジンを停止することで燃料消費量を低減するアイドリングストップに関する従来技術として、特許文献1に記載の技術が知られている。この従来技術では、車両の発進後に車速が規定速度以上に到達する条件を満たさない限りアイドリングストップを行わないようにしている。このような制御をすることで、車両のアイドリングストップ期間を可能な限り延長して燃料消費量の節減を図りながら、渋滞時等にエンジンの停止及び再始動が頻繁に行われるのを防止できるとしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−257121
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術の構成では、仮に燃費向上を期待できる所定時間A以上のアイドリングストップが可能な状況であったとしても、前回の発進から車速が規定速度以上に到達するという速度履歴条件を満たしていなければアイドリングストップが行われないことになる。つまり、アイドリングストップによって燃料消費量を節減できる機会がありながら、自車両の速度履歴条件が逆に仇となって折角の機会を逸してしまうという問題がある。
【0005】
例えば、停止信号や渋滞に伴う停車時のアイドリングストップ中において、前の車両との車間を詰めるために少しだけ前進するという状況を想定してみる。この場合、エンジンを再始動し、そのまま微速で前進して速度がアイドリングストップの規定速度まで上がりきらないまま停止すると、その後の停止時間が長かった(所定時間A以上のアイドリングストップが可能であった)としてもアイドリングストップが実施されず、その停止中にも燃料を消費し続けることになる。
【0006】
一方、比較的軽度の渋滞の中を走行中に、アイドリングストップの規定速度付近の速度を出しながら断続的に発停止を繰返すような状況を想定してみる。この場合、発進後に速度が一度でも規定速度を達していれば、次の停止時にたとえ短時間のエンジン停止しか見込まれないような状況であってもアイドリングストップが実施され、またすぐにエンジンを再始動するといった悪循環となることがある。このような状況下でアイドリングストップをした場合、アイドリングストップをしなかった場合よりもむしろ燃費が悪化してしまうこともあり得る。
【0007】
アイドリングストップが可能な時間は、自車両側の都合だけでなく、渋滞等の自車両周辺の他車両の走行状況に大きく左右されると考えられる。したがって、従来技術のような自車両の速度履歴条件だけでアイドリングストップの可否を適切に判断するのは難しい。
【0008】
本発明は、上記問題を解決するためになされたものであり、自車両周辺の交通状況に基づいてアイドリングストップの実施の可否を的確に判断することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するためになされた請求項1に記載のアイドリングストップ制御装置は、次のような特徴を有する。第1条件判定手段は、自車両の状態を判定要素にして、アイドリングストップを実施可能とするための自車両の都合に関する所定の第1条件が成立するか否かを判定する。一方、第2条件判定手段は、周辺車両情報取得手段により取得した周辺車両情報で示される周辺車両の状態を判定要素にして、アイドリングストップを実施可能とするための周辺車両による都合に関する所定の第2条件が成立するか否かを判定する。そして、アイドリングストップ制御手段は、第1条件判定手段及び第2条件判定手段の判定結果に基づき、第1条件及び第2条件の双方が成立することを条件に、自車両のエンジン制御手段に対してアイドリングストップを指示する。
【0010】
このように構成された本発明によれば、自車両の状態を判定要素とするアイドリングストップの実施要件(第1条件)だけでなく、周辺車両の状態を判定要素とするアイドリングストップの実施要件(第2条件)を加味して、アイドリングストップの可否を的確に判断できる。
【0011】
一例として、自車両がアイドリングストップを実施できる期間は、自車両の走行を制限する周辺車両の停滞度合に因るところが大きい。そこで、例えば、自車両が取得した周辺車両情報に基づく周辺車両の状態が、所定時間以上のアイドリングストップが期待できるような所定の停滞度合を呈することを第2条件とすることが考えられる。このようにすることで、周辺車両の停滞により燃費を向上可能な所定時間以上の停止時間を確保できる状況において、的確にアイドリングストップを実施できるようになる。反対に、交通流が順調で周辺車両が停滞していない状況では、燃費を向上可能な所定時間以上の停止期間を確保できないと考えられる。このような状況下では、たとえ自車両の走行状態がアイドリングストップ可能な第1条件を満たす場合でも、周辺車両に関する第2条件を不成立とすることで、燃費の向上に寄与しない余分なアイドリングストップの実施を回避できる。
【0012】
つぎに、請求項2に記載のアイドリングストップ制御装置は、自車両の進路前方を先行する先行車両を特定し、その特定した先行車両に該当する周辺車両情報のみに基づき、第2条件が成立するか否かを判定することを特徴とする。自車両がアイドリングストップを実施できる期間は、主に自車両の進路前方を先行する車両の停滞度合に因るところが大きいと考えられる。そこで、自車両の進路前方を先行する先行車両を特定し、その先行車両の状態を判定要素に第2条件の成否を判定することで、アイドリングストップの可否を的確に判断できる。
【0013】
つぎに、請求項3に記載のアイドリングストップ制御装置は、次のような特徴を有する。周辺車両情報取得手段は、周辺車両のアクセル開度に関する情報を含む周辺車両情報を取得する。また、第2条件は、周辺車両のアクセル開度の状況に関する条件を含む。そして、第2条件判定手段は、周辺車両情報で示される周辺車両のアクセル開度の状況に基づき、第2条件が成立するか否かを判定する。
【0014】
例えば、周辺車両のアクセル開度が総じて大きい場合、たとえ今自車両がエンジン停止できる状態であったとしても、周辺車両が動くことでまたすぐに再始動を余儀なくされ、その結果、燃費を向上可能な所定時間以上の停止期間を確保できない可能性が高い。よって、このような状況下では、たとえ自車両の走行状態がアイドリングストップ可能な第1条件を満たす場合であっても、周辺車両に関する第2条件を不成立とすることで、燃費の向上に寄与しない余分なアイドリングストップの実施を回避できる。反対に、周辺車両のアクセル開度が総じて小さい場合、周辺車両が停滞している可能性が高いと考えられ、燃費を向上可能な所定時間以上の停止期間を確保できる可能性が高い。よって、このような状況下でアイドリングストップを実施することで燃費を向上できる。このように、周辺車両のアクセル開度の状況を判定要素に第2条件の成否を判定することで、アイドリングストップの可否を的確に判断できる。
【0015】
請求項4に記載のアイドリングストップ制御装置は、次のような特徴を有する。周辺車両情報取得手段は、周辺車両の速度に関する情報を含む周辺車両情報を取得する。また、第2条件は、周辺車両の速度に関する条件を含む。そして、第2条件判定手段は、周辺車両情報で示される周辺車両の速度に基づき、第2条件が成立するか否かを判定する。
【0016】
例えば、周辺車両の速度が総じて大きい場合、たとえ今自車両がエンジン停止できる状態であったとしても、周辺車両の流れに合わせてまたすぐに再始動を余儀なくされ、その結果、燃費を向上可能な所定時間以上の停止期間を確保できない可能性が高い。よって、このような状況下では、たとえ自車両の走行状態がアイドリングストップ可能な第1条件を満たす場合であっても、周辺車両に関する第2条件を不成立とすることで、燃費の向上に寄与しない余分なアイドリングストップの実施を回避できる。反対に、周辺車両の速度が総じて小さい場合、周辺車両が停滞している可能性が高いと考えられ、燃費を向上可能な所定時間以上の停止期間を確保できる可能性が高い。よって、このような状況下でアイドリングストップを実施することで燃費を向上できる。このように、周辺車両の速度の状況を判定要素に第2条件の成否を判定することで、アイドリングストップの可否を的確に判断できる。
【0017】
一方、周辺車両のアクセル開度の状況を判定要素にする場合、アクセル開度の時間的経緯を反映するために、請求項5に記載ように構成するとよい。つまり、記憶手段は、周辺車両情報取得手段により取得した周辺車両情報を時系列に記憶する。また、第2条件は、周辺車両の時系列のアクセル開度の積算値に関する条件を含む。そして、第2条件判定手段は、記憶手段が記憶している時系列の周辺車両情報で示されるアクセル開度を、周辺車両情報の取得時期が古い程小さくなる時間重みを付けて積算し、この加重積算の算出結果に応じて第2条件が成立するか否かを判定する。
【0018】
周辺車両における過去から現在までの時系列のアクセル開度を積算することで、その周辺車両の走行状態を精度よく把握できる。このとき、情報の取得時期が古い程小さくなる時間重みを付けて積算を行うことで、時間的に古いアクセル開度の情報の影響を相対的に小さくし、新しいアクセル開度の情報を積算結果に強く反映させることができる。このような時間による重み付けをしたアクセル開度の積算値を第2条件の判定要素に利用することで、アイドリングストップの可否を周辺車両の現状に即して判断できる。
【0019】
あるいは、周辺車両のアクセル開度の状況を判定要素にする場合、周辺車両の位置による自車両の走行への影響を反映するために、請求項6に記載ように構成するとよい。つまり、位置情報取得手段は、自車両の現在位置に関する位置情報を取得する。記憶手段は、周辺車両情報取得手段により取得した周辺車両情報、及び、位置情報取得手段により取得した位置情報を時系列に記憶する。また、第2条件は、周辺車両の時系列のアクセル開度の積算値に関する条件を含む。そして、第2条件判定手段は、記憶手段が記憶している時系列の周辺車両情報で示されるアクセル開度を、周辺車両情報の取得時期における当該周辺車両とその取得時期に対応する自車両との位置情報から特定した車間距離が大きい程小さくなる距離重みを付けて積算し、この加重積算の算出結果に応じて第2条件が成立するか否かを判定する。
【0020】
自車両の走行が周辺車両により制限される場合、互いの車間距離が小さいほどその影響を受けやすく、車間距離が大きいほど影響を受けにくい。つまり、周辺車両の状態に基づいてアイドリングストップできる期間を考慮する場合、自車両に近い周辺車両のアクセル開度をより重視すればよい。そこで、周辺車両における過去から現在までの時系列のアクセル開度を積算する際、その時々の自車両との車間距離が大きい程小さくなる距離重みを付けて積算を行うことで、自車両から遠い周辺車両のアクセル開度の情報の影響を相対的に小さくし、自車両から近い周辺車両のアクセル開度の情報を積算結果に強く反映させることができる。このような車間距離による重み付けをしたアクセル開度の積算値を第2条件の判定要素に利用することで、アイドリングストップの可否を周辺車両の位置状況に即して判断できる。
【0021】
さらに、請求項7に記載のように、上述の距離重みに加え、周辺車両情報の取得時期が古い程小さくなる時間重みを付けて時系列のアクセル開度を積算するようにしてもよい。
あるいは、上述の時間重みや距離重みの他に、周辺車両の進路変更や方向転換等の動向に基づく重み付けを考慮してアクセル開度を積算するために、請求項8に記載ように構成するとよい。つまり、周辺車両情報取得手段は、周辺車両のウインカの作動状況を示すウインカ情報を更に含む周辺車両情報を取得する。また、第2条件判定手段は、更に周辺車両情報の取得時期におけるウインカの作動状況に応じたウインカ作動重みを付けてアクセル開度を積算し、この加重積算の算出結果に応じて第2条件の成否を判定する。
【0022】
例えば、自車両前方の周辺車両が自車両の進路と異なる方向へ移動すると予測できるウインカの作動状況を把握した場合、そのときの周辺車両のアクセル開度を小さく補正する重みを付けてアクセル開度を積算するといった運用が考えられる。このように、周辺車両のウインカ情報に基づいて、周辺車両の自車両に対する影響度合をアクセル開度の積算結果に反映することで、アイドリングストップの可否を周辺車両の現状に即して的確に判断できる。
【0023】
ところで、アイドリングストップの可否の判定要素として、周辺車両情報に加え交差点の位置情報を利用することが考えられる。具体的には、請求項9に記載のように構成するとよい。すなわち、交差点情報取得手段は、自車両の進路前方の交差点の位置に関する情報を含む交差点情報を取得する。また、位置情報取得手段は、自車両の現在位置に関する位置情報を取得する。第2条件は、自車両の現在位置と進路前方の交差点との所定の位置関係に関する条件を含む。そして、第2条件判定手段は、更に交差点情報取得手段により取得した交差点情報と、位置情報取得手段により取得した位置情報で示される自車両の現在位置との所定の位置関係を判定要素に加えて、第2条件が成立するか否かを判定する。
【0024】
例えば、交差点での信号待ち等により交通流の停滞が生じている場合、自車両の現在地から交差点までの距離の長短によってその交差点を要因とする交通流の影響が自車両に波及する時期や度合が異なる。それにより、自車両のアイドリングストップが可能な期間も異なると考えられる。そこで、上記のように現在位置と当該交差点との位置関係を判定要素に加えて第2条件の成否を判定することで、交差点を要因とする交通流の波及度合を反映した態様にてアイドリングストップの可否を判断できる。
【0025】
あるいはアイドリングストップの可否の判定要素として、周辺車両情報に加え交差点に設けられた交通信号機の信号情報を利用することが考えられる。具体的には、請求項10に記載のように構成するとよい。すなわち、信号情報取得手段は、自車両の進路前方の交差点に設置された交通信号機の信号現示の予定に関する情報を含む信号情報を取得する。また、第2条件は、自車両の進路前方の交差点に設置された交通信号機における信号の切替時期に関する条件を含む。そして、第2条件判定手段は、更に信号情報取得手段により取得した信号情報から特定した信号の切替時期を判定要素に加えて第2条件が成立するか否かを判定する。
【0026】
前方の交通信号機の信号が何時どのように切替わるかによって、自車両が停止してから再発進するまでの期間が異なる。つまり、自車両のアイドリングストップが可能な期間も異なると考えられる。例えば、現在表示中の停止信号の残り時間が少ない場合、アイドリングストップが可能な期間も短い。反対に、次の進行信号に切替わるまでの時間が長い場合、アイドリングストップが可能な期間も長い。そこで、上記のように前方交差点における信号の切替時期を判定要素に加えて第2条件の成否を判定することで、信号の切替時期を反映した態様にてアイドリングストップの可否を判断できる。
【0027】
さらに、信号情報を用いてアイドリングストップの可否を判断する場合、請求項11に記載のように構成してもよい。すなわち、第2条件判定手段によって、周辺車両情報に関する判定要素が第2条件の成立要件を満たし、かつ、信号の切替時期に関する判定要素が第2条件の成立要件を満たさないと判定された場合、シフトダウン指示手段は自車両の変速機のシフトポジションを制御するシフト制御手段に対してシフトダウンを指示する。
【0028】
周辺車両情報に関する判定要素が第2条件の成立要件を満たし、かつ、信号の切替時期に関する判定要素が第2条件の成立要件を満たさない状況下では、信号の切替時期が到来すると程なくして再加速をすることが予想される。そのような場合、予め自車両の変速機をシフトダウンしておくことで、再加速時の速度の立ち上がりをよくできる。よって、上記発明によれば、燃費の向上が期待できないアイドリングストップを回避すると共に、ドライビリティを向上できる。
【0029】
さらに、請求項12に記載のように、シフトダウン指示手段は、第2条件判定手段による判断結果に加え、更に自車両の現在のエンジン回転数と、アクセル全閉時にエンジンへの燃料供給をカットするための条件である燃料カット回転数とが所定の関係になっていることを条件にシフトダウンを指示するように構成するとよい。
【0030】
燃料噴射が電子的に制御される一般的なエンジンでは、アクセルを全閉した惰性走行時におけるエンジン回転数が燃料カット回転数以上の場合であれば燃料噴射がカットされ、燃料カット回転数を下回る場合であれば燃料噴射が行われアイドリング状態になる。そこで、例えば、燃料カット回転数近傍でシフトダウンを行うことで、燃料カット回転数よりも高いエンジン回転数を維持するようにすれば、燃料消費を抑えることができる。よって、アイドリングストップを行うことができない状況下であっても、燃料カット回転数に基づくシフトダウンの制御をすることで燃費を向上できる。
【0031】
ところで、第2条件判定手段による判定の対象となる、自車両の進路前方の先行車両を特定する具体的な方法については、請求項13に記載のようにすることが考えられる。すなわち、位置方位情報取得手段は、自車両の現在位置及び進行方位を示す位置方位情報を取得する。また、周辺車両情報取得手段は、周辺車両の現在位置及び進行方位を示す位置方位情報を含む周辺車両情報を取得する。そして、第2条件判定手段は、位置方位情報取得手段により取得した位置方位情報で示される自車両の現在位置及び進行方位と、周辺車両情報取得手段により取得した位置方位情報で示される周辺車両の現在位置及び進行方位との関係に基づいて、自車両の進路前方を先行する先行車両を特定する。
【0032】
このような構成において、さらに、請求項14に記載のようにしてもよい。すなわち、第2条件判定手段は、自車両の現在位置から進行方位に向けて延びる仮想進路上に位置する周辺車両であって、その周辺車両の進行方位と自車両の進行方位との差が所定範囲内である条件を満たすものを先行車両として特定する。
【0033】
請求項13,14に記載の発明によれば、自車両と周辺車両の位置及び進行方位のみの簡易な構成によって先行車両を特定することができ、ナビゲーション装置等の高度な経路案内手段等を持たなくとも実現可能である。
【0034】
さらに、自車両の進路を特定する際には、位置及び進行方位の情報に加え、交差点の位置情報と自車両のウインカの作動状況とを利用することができる。具体的には、請求項15に記載のように構成するとよい。すなわち、距離情報取得手段は、自車両の現在位置から進路前方の交差点までの距離を取得する。また、ウインカ情報取得手段は、自車両のウインカの作動状況を示すウインカ情報を取得する。そして、第2条件判定手段は、自車両から交差点までの距離が所定値以内の条件下において自車両のウインカが左右何れかの方向を指示する作動状態である場合、当該交差点の位置を始点に自車両の現在の進行方位にウインカの指示方向を加えた方向に向けて延びる仮想進路上を先行する周辺車両を先行車両として特定する。
【0035】
交差点のすぐ手前でウインカを作動させている場合、その交差点でウインカの点灯方向へ方向転換することが予想できる。そこで、自車両から交差点までの距離とウインカの作動状況に応じて予測される方向転換先の進路上に存在する周辺車両を先行車両として特定することで、自車両の走行に影響を与える可能性の高い先行車両を第2条件判定手段による判定の対象として抽出することができる。その結果として、先行車両の現状に即してアイドリングストップの可否を的確に判断できる。
【0036】
一方、自車両が走行する予定の経路が決まっている場合、請求項15に記載のようにすることが考えられる。すなわち、周辺車両情報取得手段は、周辺車両の現在位置及び進行方位を示す位置方位情報を含む周辺車両情報を取得する。そして、第2条件判定手段は、自車両が走行する予定の経路である走行予定経路に関する経路情報を取得し、この経路情報で示される走行予定経路と、周辺車両情報取得手段により取得した位置方位情報で示される周辺車両の現在位置及び進行方位とに基づき、走行予定経路上を先行する周辺車両を先行車両として特定する。
【0037】
ここでいう走行予定経路は、例えばナビゲーション装置において探索された目的地までの推奨経路や、走行履歴として記録された過去の走行経路、通勤や帰宅等の日常よく通行する経路等である。予め判っている走行予定経路上に存在する周辺車両を先行車両として特定することで、自車両の走行に影響を与える可能性の高い先行車両を第2条件判定手段による判定の対象として抽出することができる。その結果として、先行車両の現状に即してアイドリングストップの可否を的確に判断できる。
【図面の簡単な説明】
【0038】
【図1】アイドリングストップ制御装置1の概略構成を示すブロック図である。
【図2】周辺車両データの具体的内容を示す説明図である。
【図3】自車両データの具体的内容を示す説明図である。
【図4】第1条件判定処理の手順を示すフローチャートである。
【図5】第2条件判定処理の手順を示すフローチャートである。
【図6】アクセル開度に対する時間重み及び距離重みの付与例を示す説明図である。
【図7】第2条件判定処理の変形例を示すフローチャートである。
【図8】アイドリングストップ制御装置1の変形例を示すブロック図である。
【図9】第2条件判定処理の変形例を示すフローチャートである。
【図10】アイドリングストップ制御装置1の変形例を示すブロック図である。
【図11】第2条件判定処理の変形例を示すフローチャートである。
【図12】第2条件判定処理の変形例を示すフローチャートである。
【図13】アイドリングストップ制御装置1の変形例を示すブロック図である。
【図14】第2条件判定処理の変形例を示すフローチャートである。
【図15】第2条件判定処理の変形例を示すフローチャートである。
【発明を実施するための形態】
【0039】
以下、本発明の一実施形態を図面に基づいて説明する。なお、本発明は下記の実施形態に何ら限定されるものではなく様々な態様にて実施することが可能である。
[アイドリングストップ制御装置の構成の説明]
まず、図1に基づいて実施形態のアイドリングストップ制御装置1の構成を説明する。アイドリングストップ制御装置1は、内燃エンジンを動力とする車両に搭載され、この車両に設けられたGPS受信機21、方位センサ22、車速センサ23、アクセル開度センサ24、ウインカ制御部25、バッテリセンサ26、スタータ故障検知部27、エンジン制御部28等の各機器と通信可能に接続されている。
【0040】
アイドリングストップ制御装置1に接続している各部構成について説明する。GPS受信機21は、GPS衛星からの測位信号に基づいて自車両の現在位置を測位するための装置である。方位センサ22は、ジャイロスコープにより自車両の角速度を検知し、そこから自車両の進行方位を検知するための装置である。車速センサ23は、自車両の速度を検知するための装置である。アクセル開度センサ24は、自車両のアクセルペダルの踏み込み量(すなわち、アクセル開度)を検知するための装置である。ウインカ制御部25は、方向指示器(ウインカ)の作動制御を行う装置であり、ウインカの作動状況を示すウインカ情報をアイドリングストップ制御装置1に入力する。バッテリセンサ26は、自車両に搭載されているバッテリの状態(電圧、充電率等)を検知し、その検知結果をアイドリングストップ制御装置1に入力する装置ための装置である。スタータ故障検知部27は、エンジンを始動させるためのスタータの故障を検知し、その検知結果をアイドリングストップ制御装置1に入力する装置ための装置である。エンジン制御部28は、エンジン運転における、始動・停止制御、燃料制御、点火制御、動弁制御、給排気制御等の各種制御を総合的に行うための装置である。
【0041】
一方、アイドリングストップ制御装置1は、CPU、ROM、RAM、通信機器等からなるコンピュータ装置で構成されており、そのコンピュータ装置により実現する機能的構成として情報取得部10と判定部11とを備える。
【0042】
このうち情報取得部10は、アイドリングストップの実施の可否を判定するために必要な内外の情報を取得及び記憶するための構成であり、位置演算部12、無線受信部14、車両データ記憶部16、及び無線送信部18を備える。位置演算部12は、GPS受信機21、方位センサ22、車速センサ23の各種センサ類による検出信号に基づき、周知の演算方法により自車両の現在位置(座標値)及び進行方位を演算する。現在位置の演算結果は車両データ記憶部16及び無線送信部18へ出力され、進行方位の演算結果は無線送信部18及び判定部11の第2条件判定部15へ出力される。
【0043】
無線受信部14は、通信装置を搭載する周辺車両や路側に設置された通信装置(路側機)から無線通信により情報を取得するための通信装置である。図1に示す実施例では、自車両周辺の他車両から車車間通信によって、当該周辺車両の現在における位置(座標)、進行方位、アクセル開度、車速、ウインカ情報と、当該周辺車両の車両識別番号(VIN:Vehicle Identification Number)等を含む周辺車両データを受信する。この周辺車両データは、各車両から例えば100ms周期で繰返し送信される。無線受信部14により受信した周辺車両データは車両データ記憶部16へ出力され、そこでVIN別に取得順の時系列で記憶される。
【0044】
車両データ記憶部16は、RAM等の記憶素子により構成され、車車間通信により取得した周辺車両データと、各種センサ類から取得した自車両に関する自車両データとを記憶する。この車両データ記憶部16には、現在から過去の一定期間に受信した周辺車両データが周辺車両のVINごとに取得順の時系列で記録された周辺車両データベース(図2参照)として格納されている。また、情報取得部10において例えば100ms周期で取得した自車両の現在位置(座標値)、進行方位、及びウインカ情報等を含む自車両データが取得順の時系列で記録された自車両データベース(図3参照)として格納されている。車両データ記憶部16に格納される周辺車両データ及び自車両データのより詳細な内容については後述する。
【0045】
無線送信部18は、位置演算部12から入力される自車両の現在位置(座標値)、進行方位、車速センサ23から入力される自車両の速度、アクセル開度センサ24から入力されるアクセル開度、ウインカ制御部25から入力されるウインカ情報、及び、自車両の車両識別番号(VIN)を含む車両データを、車車間通信により周辺車両に対して送信する。これにより、自車両周辺の車両において自車両に関する情報を周辺車両データとして取得できる。なお、車両データの送信は例えば100ms周期で行う。
【0046】
なお、無線受信部14及び無線送信部18による無線通信に用いる通信様式としては、例えばETC(登録商標)システム等で用いられる狭域通信(DSRC)や、VICS(登録商標)等で用いられる電波ビーコン等の技術を用いることが考えられる。あるいは、日本国において、2011年(予定)のアナログテレビ放送の終了後に利用区分が再編される予定の700MHz帯の電波を利用することも考えられる。この700MHz帯の電波は、DSRCで用いられる5.8GHz帯の電波と比較して波長が長いため、回折を起こし易い。そのため、建築物が密集する都市部において、建物の影からでも良好に通信が行うことができる。
【0047】
一方、判定部11は、車両の内外から取得した情報に基づいてアイドリングストップの実施の可否を判定するため構成であり、第1条件判定部13、第2条件判定部15、及びこれらの判定結果からアイドリングストップ指令(以下、IS指令)を出力するIS指令出力部17を備える。第1条件判定部13は、車速センサ23、アクセル開度センサ24、バッテリセンサ26、及びスタータ故障検知部27の各センサ類からの検知情報に基づく自車両の状態を判定要素にして、アイドリングストップを実施可能とするための自車両の都合に関する第1条件が成立するか否かを判定する(第1条件判定処理)。そして、その判定結果を示す第1条件フラグをIS指令出力部17へ出力する。第1条件フラグは、第1条件が成立している状態を「1」の値で表し、第1条件が成立していない状態を「0」の値で表す。この第1条件判定処理のより詳しい説明については後述する。
【0048】
第2条件判定部15は、位置演算部12から自車両の進行方位を示す情報を取得すると共に、車両データ記憶部16に格納されている周辺車両データベース及び自車両データベースを参照し、これらの情報に基づく周辺車両状況を判定要素にして、アイドリングストップを実施可能とするための周辺車両の都合に関する第2条件が成立するか否かを判定する(第2条件判定処理)。そして、その判定結果を示す第2条件フラグをIS指令出力部17へ出力する。第2条件フラグは、第2条件が成立した状態を「1」の値で表し、第2条件が成立していない状態を「0」の値で表す。この第2条件判定処理のより詳しい説明については後述する。
【0049】
IS指令出力部17は、第1条件判定部13及び第2条件判定部15からそれぞれ出力される第1条件フラグ及び第2条件フラグの論理積を演算し、その演算結果をIS指令として出力する。すなわち、第1条件判定部13により第1条件が成立した(第1条件フラグ=1)と判定され、かつ、第2条件判定部15により第2条件が成立した(第2条件フラグ=1)と判定された場合に、エンジン制御部28に対してアイドリングストップを許可する旨のIS指令(ここでは「1」の値)が出力される。そして、エンジン制御部28は、判定部11のIS指令出力部17からアイドリングストップを許可する旨のIS指令を受信するとエンジンのアイドリングを停止する。
【0050】
[周辺車両データの説明]
つぎに、車両データ記憶部16に格納されている周辺車両データベースの詳細な内容について図2を参照しながら説明する。
【0051】
図2(a)に示すように、周辺車両データベースは、周辺車両1台分のレコードが複数の車両データの集合で記録され、そのレコードが複数車両分まとまって構成されたものである。そして、周辺車両1台分のレコードは、その車両の車両識別番号VINに対応付けて行番号(row)により番号付けされている。
【0052】
周辺車両1台分のレコードには、該当車両の車両データが取得時刻の新しい順に時系列で並んで記録されており、時刻の新しい順に列番号(column)により番号付けされている。つまり、この周辺車両データベースにおいてはcolumn=1のフィールドに割当てられている車両データがその車両の中で最新のデータとなり、末番のcolumnのフィールドに割当てられている車両データがその車両の中で最古のデータとなる。
【0053】
個々の車両データのフィールドには、その車両データを取得した時刻、当該車両の位置座標、進行方位、速度、ウインカの作動状況を示すウインカ情報の各情報が含まれている。なお、車両データを取得した時刻は、アイドリングストップ制御装置1に内蔵された時計手段(図示なし)や他の機器の時計手段(図示なし)から取得した時刻を記録する。あるいは、無線受信部14を介して受信した周辺車両データに含まれる送信時刻、すなわち送信元の周辺車両側で記録した時刻を用いてもよい。
【0054】
また、アクセル開度については、無線受信部14を介して受信した元の周辺車両データにおいて0%(全閉)〜100%(全開)の数値で表されているものを、車両データ記憶部16に記録する際に「1(全閉=オフ)」又は「0(0%より大=オン)」と2値化して記録しておく。このようにすることでメモリ容量を節約できる。また、ウインカ情報については、ウインカの作動状況を「左点灯」、「右点灯」、「無点灯」の何れかの状態を表す規定の数値が記録される。
【0055】
図2(a)に示す周辺車両データベースを保有している状態において、車車間通信によって車両A(VIN=A)から最新の車両データを受信したという想定で説明をする。この場合、図2(b)に示すように、新たに取得した車両データに取得時刻tnを追加したものを、VIN=Aの車両に該当するレコードのcolumn=1のフィールドに記録する。このとき、このレコードの既存の車両データについては後尾側のcolumnへ1つずつシフトする。このようにして、各周辺車両からおよそ100ms周期でそれぞれ送信される車両データを受信する度に、各周辺車両の時系列の車両データが蓄積されていく。
【0056】
[自車両データの説明]
つぎに、車両データ記憶部16に格納されている自車両データベースの詳細な内容について図3を参照しながら説明する。
【0057】
図3(a)に示すように、自車両データベースは、自車両に関する車両データの集合で構成されたものである。この自車両データベースは、自車両の車両データが取得時刻の新しい順に時系列で並んで記録されており、時刻の新しい順に列番号(column)により番号付けされている。つまり、この自車両データベースにおいてはcolumn=1のフィールドに割当てられている車両データが最新のデータとなり、末番のcolumnのフィールドに割当てられている車両データが最古のデータとなる。
【0058】
個々の車両データのフィールドには、その車両データを取得した時刻、自車両の位置座標、ウインカの作動状況を示すウインカ情報の各情報が含まれている。なお、車両データを取得した時刻は、アイドリングストップ制御装置1に内蔵された時計手段(図示なし)や他の機器の時計手段(図示なし)から取得した時刻を記録する。また、ウインカ情報については、ウインカの作動状況を「左点灯」、「右点灯」、「無点灯」の何れかを表す何れかの状態を表す規定の数値が記録される。
【0059】
図3(a)に示す自車両データベースを保有している状態において、位置演算部12及びウインカ制御部25から最新のデータを受信したという想定で説明をする。この場合、図3(b)に示すように、新たに取得した車両データに取得時刻tnを追加したものをcolumn=1のフィールドに記録する。このとき、既存の車両データについては後尾側のcolumnへ1つずつシフトする。このようにして、各センサ類からおよそ100ms周期でデータを取得する度に、自車両に関する時系列の車両データが蓄積されていく。
【0060】
[第1条件判定処理の説明]
つぎに、判定部11の第1条件判定部13が実行する第1条件判定処理の手順について、図4のフローチャートを参照しながら説明する。この第1条件判定処理は、例えば100msごとに繰返し実行される。
【0061】
第1条件判定部は、まず、第1条件の成否を示す第1条件フラグの値を「0(不成立)」にセットする(S100)。つぎに、車速センサ23、アクセル開度センサ24、バッテリセンサ26及びスタータ故障検知部27の各センサ類からの検知情報に基づいて、所定の第1条件が成立するか否かを判定する(S101)。
【0062】
本実施形態では、第1条件として、バッテリ電圧>規定値、かつ、スタータ回路正常、かつ、速度<20km/h、かつ、アクセル開度=0(全閉)、という条件を採用している。これは、今エンジンを停止しても安全が確保されるか(車速が規定値未満か)、エンジンを停止して再始動が可能か(バッテリ電圧が規定値より大きいか、スタータが故障していないか)、運転者がエンジン停止を希望しているか(アクセルをオフにしているか)といった観点で採用される条件である。なお、第1条件としてどのような条件を採用するかについては設計事項であり、環境負荷や安全性への配慮、車両の特性等に応じて適切な条件を選択できる。
【0063】
S101の判定の結果、第1条件が成立した場合(S101:YES)、第1条件フラグの値を「1(成立)」にセットし(S102)、本処理を終了する。一方、S101の判定の結果、第1条件が不成立である場合(S101:NO)、第1条件フラグを「0(不成立)」にセットしたまま本処理を終了する。そして、第1条件判定処理による判定で設定された第1条件フラグの値はIS指令出力部17へ出力される。
【0064】
[第2条件判定処理(第1実施形態)の説明]
つぎに、判定部11の第2条件判定部15が実行する第2条件判定処理(第1実施形態)の手順について、図5のフローチャートを参照しながら説明する。この第2条件判定処理は、例えば100msごとに繰返し実行される。
【0065】
第2条件判定部15は、まず、S200で初期化処理を行う。具体的には、第2条件の成否を示す第2条件フラグの値を「0(不成立)」にセットし、かつ、第2条件の成否を判定するための指標であるアクセル度の値を「0」にセットし、かつ、アクセル度の演算対象となった周辺車両の数を示す判定台数のカウンタを「0」にセットする。
【0066】
つぎに、アクセル度の演算の対象となる周辺車両(以下、選択車両と称する)を示すカウンタであるrowの値を1にセットする(S201)。このカウンタrowの値は、周辺車両データベース(図2参照)の行番号と対応しており、このカウンタrowの値が1のときは、周辺車両データベースの行番号(row)が1のレコードに記録されている車両(図2の事例では、VIN:Aの車両)が選択車両に該当する。
【0067】
つぎに、この選択車両が現時点において自車両の進路前方に存在する先行車両に該当するか否かを判定する(S202)。具体的には、自車両の現在位置の座標及び進行方位と、周辺車両データベースにおける当該選択車両の最新時刻(すなわち、column=1)の車両データに含まれる位置座標及び進行方位を用いて判定する。自車両と選択車両とが同一進路上であると判定する条件は、自車両の現在位置から進行方位前方に向けて伸びる所定幅の仮想道路上に選択車両が存在し、かつ、自車両の進行方位と選択車両の進行方位との差が規定値以下となっていることである。
【0068】
S202で選択車両が先行車両に該当すると判定した場合(S202:YES)、S203の処理へ進み、以下、この選択車両を対象にアクセル度の演算を行う。一方、選択車両が先行車両に該当しないと判定した場合(S202:NO)、この選択車両についてはアクセル度の演算を行わず、そのままS210の処理へ移行する。
【0069】
選択車両が先行車両に該当する場合に進むS203では、アクセル度の演算の対象となる車両データの時刻(以下、選択時刻と称する)を示すカウンタであるcolumnの値を1にセットする。このカウンタcolumnの値は、周辺車両データベースの列番号と対応しており、このカウンタcolumnの値が1のときは、周辺車両データベースの列番号(column)が1のフィールドに記録されている選択車両の車両データがアクセル度の演算の対象となる。
【0070】
つぎに、S204では、カウンタrowの値及びカウンタcolumnの値に該当の速度の情報を周辺車両データベースから取得し、この選択車両の選択時刻における速度が20km/h未満であるか否かを判定する。ここで選択車両の選択時刻における速度が20km/h未満であると判定した場合(S204:YES)、S206の処理へ進み、この選択時刻を対象にアクセル度の演算を行う。一方、選択車両の選択時刻における速度が20km/h以上であると判定した場合(S204:NO)、この選択車両についてはアクセル度の演算を行わず、そのままS207の処理へ移行する。
【0071】
選択車両の選択時刻における速度が20km/h未満である場合に進むS206では、下記式(1)によりアクセル度を演算する。アクセル度は、選択時刻におけるアクセル開度の値に対して選択時刻の新旧に関する時間重み及び選択車両と自車両との距離に関する距離重みによる加重計算をしたものを積算した値である。
【0072】
【数1】
【0073】
なお、上記式(1)において、右辺第1項は従前のアクセル度の値である。また、右辺第2項の分子であるアクセル開度の値は、周辺車両データベースにおけるカウンタrowの値及びカウンタcolumnの値に該当の車両データから取得するものであり、1(アクセルオフ)又は0(アクセルオン)の何れかの値を示す。
【0074】
また、右辺第2項の分母のcolumnは、カウンタcolumnの値であり、時間重みに相当する値である。このcolumnの値が大きい、すなわち選択時刻が古い程、アクセル度に加算される右辺第2項のアクセル開度の値が小さく補正されるようになっている。これは、時刻が古い程、情報の確度が低いためである。
【0075】
また、右辺第2項の分母の選択時刻における選択車両と自車両との距離は、距離重みに相当する値である。選択車両と自車両との距離は、周辺車両データベースから取得した選択車両の選択時刻における位置座標と、この選択時刻に該当の周辺車両データ内にある実際の時刻情報に対応する自車両の位置座標(自車両データベース(図3参照)から取得)との差から算出されるものである。選択時刻における選択車両と自車両との距離が大きい程、アクセル度に加算される右辺第2項のアクセル開度の値が小さく補正されるようになっている。これは、選択車両が自車両から遠い程、情報の確度が低いためである。
【0076】
つぎに、S207では、カウンタcolumnの値が規定の閾値thCに到達しているか否かを判定する。すなわち、ここでは選択車両に関するアクセル度の演算が規定の時間分だけ行われたか否かを判定している。カウンタcolumnの値が規定の閾値thCに到達していない場合(S207:NO)、S208でカウンタcolumnの値を1つカウントアップし、S204の処理へ戻る。以下、同じ選択車両の次の選択時刻を対象にアクセル度の演算を行う。
【0077】
ここで、時間重み及び距離重みを考慮したアクセル開度の概念について、図6の図表を参照しながら説明する。図6(a)は、周辺車両データベースにおけるある選択車両のアクセル開度の時系列のグラフである。アクセル開度は、「1(全閉)」又は「0(開)」の何れかの値で示される。また、図6(b)は、(a)のグラフと同じ車両の同時間帯における速度の時系列のグラフである。
【0078】
アクセル度は、選択車両の速度が20km/h未満のときのアクセル開度のサンプルのみを抽出して積算することになっている。また、時間重みは、サンプルの時刻が古い程、そのときのアクセル開度の値が小さくなるように加重される。これらの条件を反映したアクセル開度/時間重みの時系列のグラフを図6(c)に示す。また、このグラフの下側に各時刻における当該選択車両と自車両との距離を付記する。
【0079】
距離重みは、自車両からの距離が遠い程、そのときのアクセル開度の値が小さくなるように加重される。この条件を反映したアクセル開度/時間重み/距離重みの時系列のグラフを図6(d)に示す。そして、このグラフに示す各サンプルの値を積算したものが、当該選択車両のアクセル度になる。
【0080】
図5のフローチャートの説明に戻る。S207でカウンタcolumnの値が規定の閾値thCに到達したと判定した場合(S207:YES)に進むS209では、判定台数の値を1つカウントアップする。つぎに、S210では、カウンタrowの値が規定の閾値thRに到達しているか否かを判定する。なお、閾値thRは、車両データ記憶部16に格納されている周辺車両データベースにおける行番号rowの最大値とする。すなわち、ここでは周辺車両データベースに登録されている全ての周辺車両についてアクセル度の演算が済んだか否かを判定している。
【0081】
カウンタrowの値が規定の閾値thRに到達していない場合(S210:NO)、S211でカウンタrowの値を1つカウントアップし、S202の処理へ戻る。以下、次の選択車両を対象にアクセル度の演算を行う。
【0082】
上述のように、S202〜S211の処理を選択車両ごとに順次繰返すことで、複数の周辺(先行)車両についてアクセル度を積算する。このようにして演算されるアクセル度は、下記式(2)の如く表される。
【0083】
【数2】
【0084】
なお、上記式(2)において、時間重みωt(VIN,t)は、車両データの取得時刻が古い程、値が小さくなる関数である。また、距離重みωd(VIN,t)は、その時刻における自車両との距離が遠い程、値が小さくなる関数である。
【0085】
そして、S210でカウンタrowの値が規定の閾値thRに到達したと判定した場合(S210:YES)、すなわち、周辺車両データベースに登録されている全ての周辺車両についてアクセル度の演算が済んだ場合、S212の処理へ移行する。S212では、現在のアクセル度の値を判定台数の値で除することで、周辺(先行)車両1台あたりの平均アクセル度の値を算出する。この平均アクセル度は、周辺(先行)車両がアイドリングストップ可能な低速度(例えば20km/h)で、かつアクセルをオフにしている傾向度合を示す指標である。この値が大きい程、周辺(先行)車両が低速度でアクセルをオフにしている傾向が強い、すなわち、交通流が停滞する傾向が強く、より長いアイドリングストップ期間を確保できる状況であることを示している。
【0086】
次のS213では、S212で算出した平均アクセル度が規定の閾値thAより大きいか否かを判定する。この閾値thAは、例えば、燃費の向上が可能な所定時間以上のアイドリングストップを継続できると見込まれる程度の平均アクセル度の値とすることが考えられる。S213の判定の結果、平均アクセル度が規定の閾値thAより大きい場合(S213:YES)、すなわち、周辺(先行)車両が低速度でアクセルをオフにしている傾向が規定よりも強い場合、第2条件フラグの値を「1(成立)」にセットし(S214)、本処理を終了する。一方、S213の判定の結果、平均アクセル度が規定の閾値thA以下である場合(S213:NO)、すなわち、周辺(先行)車両が低速度でアクセルをオフにしている傾向が規定よりも弱い場合、第2条件フラグを「0(不成立)」にセットしたまま本処理を終了する。そして、第2条件判定処理による判定で設定された第2条件フラグの値はIS指令出力部17へ出力される。
【0087】
[効果]
上記実施形態のアイドリングストップ制御装置1によれば、次のような効果を奏する。
自車両の進路前方を走行する先行車両から受信した情報に基づき、アイドリングストップ可能な車速(例えば20km/未満)においてアクセルオフにしている傾向度合を示すアクセル度を算出できる。そして、その算出したアクセル度に基づいてアイドリングストップの可否を判断できる。このようにすることで、自車両の状態を判定要素とするアイドリングストップの実施要件(第1条件)だけでなく、周辺(先行)車両の状態を判定要素とするアイドリングストップの実施要件(第2条件)を加味して、アイドリングストップの可否を的確に判断できる。
【0088】
よって、従来技術のように「前回の発進から車速が規定速度以上にならなければアイドリングストップが実施されない(車速履歴条件)」といった条件を用いる必要がない。また、第2条件では、周辺(先行)車両が低速度でアクセルをオフにしている傾向、すなわち、交通流が停滞する傾向を考慮し、十分な停止時間を確保できると見込まれる状況でアイドリングストップを許可するため、渋滞時にエンジンの停止及び再始動が頻繁に行われるのを防止できる。
【0089】
また、従来技術のような車速履歴条件を満たしていない走行状況であったとしても、第2条件が成立する条件下、すなわち、交通流が停滞する傾向が強い場合であれば、アイドリングストップが実施される。これにより、従来技術の問題点として挙げた「前回からの発進から車速が規定速度まで上がりきらないまま停止すると、その後の停止時間が長かった(所定時間A以上のアイドリングストップが可能であった)としてもアイドリングストップが実施されない」といった不都合を解決できる。
【0090】
また、比較的軽度の渋滞の中を走行中に、アイドリングストップの規定速度付近の速度を出しながら頻繁に発停止を繰返す(アクセルオン/オフを繰返す)ような状況では、周辺(先行)車両も同様の挙動をしているため、それらのアクセル度の値は必然的に低く算出されることになる。よって、このような状況下では第2条件が成立しないため、燃費の向上が見込まれない短時間のアイドリングストップを実施しないようにできる。
【0091】
[第2実施形態]
図7は、第2条件判定処理の変形例(第2実施形態)の手順を示すフローチャートである。なお、図7のフローチャートにおいては、図5に示す第1実施形態のフローチャートから変更のある部分を主に記載し、変更のない共通部分については記載を省略している。また、図7のフローチャートにおいてステップ番号が図5のフローチャートと同一の処理については、特に説明しない限りは同一の処理内容であるものとして扱い、同じ説明は繰返さない。
【0092】
第2実施形態の第2条件判定処理では、S204の処理の後にS301,S302の処理が追加された点で第1実施形態の第2条件判定処理と異なる。すなわち、S204で選択車両の選択時刻における速度が20km/h未満であると判定した場合(S204:YES)、S301の処理へ移行し、この選択時刻において選択車両のウインカの作動状況が同時期における自車両のウインカの作動状況と一致していたか否かを判定する。なお、選択車両のウインカの作動状況は、この選択時刻に該当の周辺車両データ内にあるウインカ情報に基づいて特定する。また、自車両のウインカの作動状況は、この選択時刻に該当の周辺車両データ内にある実際の時刻情報に対応する自車両のウインカ情報(自車両データベース(図3参照)から取得)に基づいて特定する。
【0093】
そして、S301で選択車両のウインカの作動状況と自車両のウインカ作動状況とが一致しないと判定した場合(S301:NO)、S302の処理へ移行し、下記式(3)によりアクセル度を演算する。ここでのアクセル度の算出は、選択時刻におけるアクセル開度の値に対して、第1実施形態と同様の時間重み及び距離重みに加え、更にウインカの作動状況に関するウインカ作動重みを加重計算した値を積算することで行われる。
【0094】
【数3】
【0095】
なお、上記式(3)において、右辺第3項にて乗じられる「1/2」の値が、ウインカ作動重みに相当する値である。例えば、自車両のウインカが点灯していないときに周辺(先行)車両のウインカが点灯している場合、その周辺(先行)車両は、自車両の進路上から逸れて自車両の走行状態に関与しなくなる可能性が高く、この車両の情報の確度は低いものとなる。そこで、周辺(先行)車両のウインカの作動状況と自車両のウインカの作動状況とが一致しない場合には、アクセル度の重み付けを軽くする(ここでは、アクセル開度に1より小さい数値を乗じる)ことで、この車両のアクセル開度の影響度合を小さくできる。
【0096】
一方、S301で選択車両のウインカの作動状況と自車両のウインカ作動状況とが一致すると判定した場合場合(S301:YES)、S206の処理へ移行する。この場合、第1実施形態と同様に上記式(2)によりアクセル度を演算する。
【0097】
[第3実施形態]
図8は、アイドリングストップ制御装置1の変形例(第3実施形態)の概略構成を示すブロック図である。なお、図8のブロック図において、図1に示す第1実施形態のブロック図と同一の符号を付した構成については、特に説明しない限りは同一のものとして扱い、同じ説明は繰返さない。
【0098】
第3実施形態のアイドリングストップ制御装置1は、判定部11の第2条件判定部15が自車両に搭載されたナビゲーションECU29から走行予定経路情報を取得し、これに基づいてアクセル度の判定対象となる先行車両を特定する点で、第1実施形態のアイドリングストップ制御装置1と異なる。
【0099】
ナビゲーションECU29は、道路地図データに基づいて現在位置から目的地までの推奨経路を探索し、その探索した推奨経路に従って走行案内をする周知のナビゲーションシステムを構成する電子制御装置である。ナビゲーションECU29から第2条件判定部15へ入力される走行予定経路情報は、目的地までの推奨経路を示す情報を用いることが考えられる。あるいは、ナビゲーションECU29において目的地までの推奨経路が設定されていない場合には、ナビゲーションECU29のメモリに走行履歴として記録されている過去の走行経路や、通勤や帰宅等の日常よく通行する経路等を示す情報も、走行予定経路情報として利用可能である。
【0100】
図9は、上記第3実施形態のアイドリングストップ制御装置1の第2条件判定部15において実行される第2条件判定処理(第3実施形態)の手順を示すフローチャートである。なお、図9のフローチャートにおいては、図5に示す第1実施形態のフローチャートから変更のある部分を主に記載し、変更のない共通部分については記載を省略している。また、図9のフローチャートにおいてステップ番号が図5のフローチャートと同一の処理については、特に説明しない限りは同一の処理内容であるものとして扱い、同じ説明は繰返さない。
【0101】
第3実施形態の第2条件判定処理では、第1実施形態のS202の処理に代えて新たにS401の処理が追加された点で第1実施形態の第2条件判定処理と異なる。このS401では、選択車両が自車両前方の予定走行経路上に存在する先行車両に該当するか否かを判定する。
【0102】
具体的には、ナビゲーションECU29から取得した予定走行経路情報と、周辺車両データベース(図2参照)の当該選択車両の最新時刻(すなわち、column=1)の車両データに含まれる位置座標及び進行方位を用いて判定する。予定走行経路上に存在する先行車両に該当すると判定する条件は、選択車両の位置座標が予定走行経路上に存在し、かつ、その予定走行経路の形状に沿った方位と選択車両の進行方位との差が規定値以下となっていることである。
【0103】
S401で選択車両が自車両前方の予定走行経路上に存在する先行車両に該当すると判定した場合(S401:YES)、S203の処理へ進み、以下、この選択車両を対象にアクセル度の演算を行う。一方、選択車両が自車両前方の予定走行経路上に存在する先行車両に該当しないと判定した場合(S401:NO)、この選択車両についてはアクセル度の演算を行わず、そのままS210の処理へ移行する。
【0104】
上述のとおり、ナビゲーションECU29から取得できる予め判っている経路上に存在する周辺車両を先行車両として特定することで、自車両の走行に影響を与える可能性の高い先行車両をアクセル度の判定対象として抽出することができる。例えば、図9の吹き出し枠に記載のとおり、自車両の走行予定経路上に存在する他車両のみがアクセル度の判定対象となり、たとえ、自車両の前方を走行する車両であっても、この走行予定経路上に存在しない他車両はアクセル度の判定対象から除外される。
【0105】
[第4実施形態]
図10は、アイドリングストップ制御装置1の変形例(第4実施形態)の概略構成を示すブロック図である。なお、図10のブロック図において、図1に示す第1実施形態のブロック図と同一の符号を付した構成については、特に説明しない限りは同一のものとして扱い、同じ説明は繰返さない。
【0106】
第4実施形態のアイドリングストップ制御装置1は、情報取得部10の無線受信部14が、路側に設置された無線通信装置(路側機)との路車間通信により進路前方の交差点に関するインフラ情報を取得し、判定部11の第2条件判定部15がこのインフラ情報と自車両のウインカの作動状況とに基づいてアクセル度の判定対象となる先行車両を特定する点で、第1実施形態のアイドリングストップ制御装置1と異なる。
【0107】
アイドリングストップ制御装置1にインフラ情報を提供する路側機は、交差点等に付随して道路近傍に設置される無線通信装置であり、当該交差点の位置情報や交通信号機に関する信号情報を含むインフラ情報を、付近を走行する車両に対して送信する。このうち、交差点の位置情報には、例えば位置座標や当該地点から交差点までの残り距離等を示す情報が含まれる。
【0108】
図11は、上記第4実施形態のアイドリングストップ制御装置1の第2条件判定部15において実行される第2条件判定処理(第4実施形態)の手順を示すフローチャートである。なお、図11のフローチャートにおいては、図5に示す第1実施形態のフローチャートから変更のある部分を主に記載し、変更のない共通部分については記載を省略している。また、図11のフローチャートにおいてステップ番号が図5のフローチャートと同一の処理については、特に説明しない限りは同一の処理内容であるものとして扱い、同じ説明は繰返さない。
【0109】
第4実施形態の第2条件判定処理では、S201の処理の後にS501,S502の処理が追加された点で第1実施形態の第2条件判定処理と異なる。S501では、自車両の現在位置から進路前方の交差点までの距離が30m以内であり、かつ、自車両のウインカが作動しているか否かを判定する。なお、自車両の現在位置から交差点までの距離は、車両データ記憶部16の自車両データベース(図3参照)における最新時刻(すなわち、column=1)の車両データに含まれる位置座標と、無線受信部14による路車間通信で取得したインフラ情報で示される交差点の位置とに基づいて特定する。また、自車両のウインカの作動状況は、車両データ記憶部16の自車両データベースにおける最新時刻(すなわち、column=1)の車両データに含まれるウインカ情報に基づき特定する。
【0110】
S501で自車両の現在位置から進路前方の交差点までの距離が30m以内であり、かつ、自車両のウインカが作動していると判定した場合(S501:YES)、S502の処理へ移行し、否定判定をした場合(S501:NO)、S202の処理へ移行する。S502では、選択車両が現時点において自車両の進行方位にウインカの指示方向を加えた仮想進路上に存在する先行車両に該当するか否かを判定する。具体的には、自車両の現在位置から前方交差点までの進路と、この交差点の位置を始点として自車両の進行方位にウインカの指示方向を加算した角度の進路とを併せた仮想進路を設定して判定を行う。仮想進路上に存在する先行車両に該当すると判定する条件は、選択車両の位置座標がこの仮想進路上に存在し、かつ、その仮想進路の形状に沿った方位と選択車両の進行方位との差が規定値以下となっていることである。
【0111】
S501で選択車両が自車両前方の仮想進路上に存在する先行車両に該当すると判定した場合(S501:YES)、S203の処理へ進み、以下、この選択車両を対象にアクセル度の演算を行う。一方、選択車両が自車両前方の仮想進路上に存在する先行車両に該当しないと判定した場合(S501:NO)、この選択車両についてはアクセル度の演算を行わず、そのままS210の処理へ移行する。
【0112】
上述のとおり、交差点から所定範囲内(例えば手前30m以内)でウインカが作動していることを条件に自車両が交差点で方向転換する方向を特定し、その方向転換先の進路を加味した仮想進路上に存在する周辺車両を先行車両として特定することで、自車両の走行に影響を与える可能性の高い先行車両をアクセル度の判定対象として抽出することができる。また、ウインカが作動しているという条件に加え、現在位置が交差点から所定範囲内(例えば手前30m以内)という条件を含むため、交差点での方向転換とは関係なく単に車線変更や停車するときに行われるウインカの作動と区別できる。これは、交差点で
[第5実施形態]
図12は、第2条件判定処理の変形例(第5実施形態)の手順を示すフローチャートである。なお、図12のフローチャートにおいてステップ番号が図5のフローチャートと同一の処理については、特に説明しない限りは同一の処理内容であるものとして扱い、同じ説明は繰返さない。
【0113】
第5実施形態では、第1実施形態の第2条件判定処理で用いたアクセル度の代わりに、別の指標であるアクセルオフ度を用いて第2条件の成否を判定する点で第1実施形態の第2条件判定処理と異なる。アクセルオフ度は、過去の所定期間(例えば、現時点から10秒前までの期間)において、周辺(先行)車両が規定速度(例えば、20km/h)未満でアクセルを全閉にしていた合計時間に、自車両との距離に関する距離重みを加重したものを、各周辺(先行)車両について積算した指標である。
【0114】
なお、第5実施形態の第2条件判定処理では、第1実施形態の第2条件判定処理におけるS200の処理に代えてS601の処理が追加され、S203〜S208の処理に代えてS602〜S604の処理が追加され、S212,S213の処理に代えてS605,S606の処理が追加されている。
【0115】
第2条件判定部15は、まず、S601で初期化処理を行う。具体的には、第2条件の成否を示す第2条件フラグの値を「0(不成立)」にセットし、かつ、第2条件の成否を判定するための指標であるアクセルオフ度の値を「0」にセットし、かつ、アクセルオフ度の演算対象となった周辺車両の数を示す判定台数のカウンタを「0」にセットする。
【0116】
つぎに、アクセルオフ度の演算の対象となる選択車両を示すカウンタであるrowの値を1にセットする(S201)。そして、S202で選択車両が自車両の進路前方に存在先行車両に該当すると判定した場合(S202:YES)、S602の処理へ進み、以下、この選択車両を対象にアクセルオフ度の演算を行う。一方、選択車両が先行車両に該当しないと判定した場合(S202:NO)、この選択車両についてはアクセルオフ度の演算を行わず、そのままS210の処理へ移行する。
【0117】
選択車両が先行車両に該当する場合に進むS602では、現時点から10秒前までの期間において選択車両が速度20km/h未満でかつアクセル全閉であった合計時間を算出する。この合計時間は、周辺車両データベース(図2参照)の当該選択車両のレコードに含まれる時刻情報と、各時刻における速度情報及びアクセル開度情報とに基づいて算出する。
【0118】
つぎに、S603では、現時点から10秒前までの期間における自車両と選択車両との平均距離を算出する。この平均距離は、周辺車両データベースの当該選択車両のレコードに含まれる時刻情報及び各時刻における位置座標と、自車両データベース(図3参照)に含まれる時刻情報及び各時刻における位置座標とに基づいて算出する。
【0119】
そして、次のS604では、S602,S603における計算結果に基づき、下記式(4)によりアクセルオフ度を演算する。
【0120】
【数4】
【0121】
なお、上記式(4)において、右辺第1項は従前のアクセルオフ度の値である。また、右辺第2項の分子は、S602において算出したアクセル全閉時の合計時間である。また、右辺第2項の分母は、S603において算出した平均距離であり、距離重みに相当する値である。これにより、過去10秒間における選択車両と自車両との平均距離が大きい程、アクセルオフ度に加算される右辺第2項のアクセル全閉時の合計時間の値が小さく補正されるようになっている。これは、選択車両が自車両から遠い程、情報の確度が低いためである。
【0122】
S604でアクセルオフ度を演算した後、判定台数の値を1つカウントアップする(S209)。つぎに、S210では、カウンタrowの値が規定の閾値thRに到達しているか否かを判定する。カウンタrowの値が規定の閾値thRに到達していない場合(S210:NO)、S211でカウンタrowの値を1つカウントアップし、S202の処理へ戻る。以下、次の選択車両を対象にアクセルオフ度の演算を行い、これを選択車両ごとに順次繰返すことで、複数の周辺(先行)車両についてアクセルオフ度を積算する。
【0123】
そして、S210でカウンタrowの値が規定の閾値thRに到達したと判定した場合(S210:YES)、すなわち、周辺車両データベースに登録されている全ての周辺車両についてアクセルオフ度の演算が済んだ場合、S605の処理へ移行する。S605では、現在のアクセルオフ度の値を判定台数の値で除することで、周辺(先行)車両1台あたりの平均アクセルオフ度の値を算出する。この平均アクセルオフ度は、周辺(先行)車両がアイドリングストップ可能な低速度(例えば20km/h)で、かつアクセルをオフにしている期間の長さを示す指標である。この値が大きい程、周辺(先行)車両が低速度でアクセルをオフにしている傾向が強い、すなわち、交通流が停滞する傾向が強く、より長いアイドリングストップ期間を確保できる状況であることを示している。
【0124】
次のS606では、S605で算出した平均アクセルオフ度が規定の閾値thA´より大きいか否かを判定する。この閾値thA´は、例えば、燃費の向上が可能な所定時間以上のアイドリングストップを継続できると見込まれる程度の平均アクセルオフ度の値とすることが考えられる。
【0125】
S606の判定の結果、平均アクセルオフ度が規定の閾値thA´より大きい場合(S606:YES)、すなわち、周辺(先行)車両が低速度でアクセルをオフにしている傾向が規定よりも強い場合、第2条件フラグの値を「1(成立)」にセットし(S214)、本処理を終了する。一方、S606の判定の結果、平均アクセル度が規定の閾値thA´以下である場合(S606:NO)、すなわち、周辺(先行)車両が低速度でアクセルをオフにしている傾向が規定よりも弱い場合、第2条件フラグを「0(不成立)」にセットしたまま本処理を終了する。
【0126】
[第6実施形態]
図13は、アイドリングストップ制御装置1の変形例(第6実施形態)の概略構成を示すブロック図である。なお、図13のブロック図において、図1に示す第1実施形態のブロック図と同一の符号を付した構成については、特に説明しない限りは同一のものとして扱い、同じ説明は繰返さない。
【0127】
第6実施形態では、無線受信部14を介して、交差点の交通信号機に付随して設置されている路側機との路車間通信により交通信号機における信号の切替時期を示す信号時間情報を含むインフラ情報を取得し、このインフラ情報を第2条件判定部15における第2条件の成否の判定に利用する。さらに、第2条件判定部15における判定結果に応じて車両の自動変速機(オートマチックトランスミッション)の協調制御がなされる点が特徴的である。
【0128】
アイドリングストップ制御装置1にインフラ情報を提供する路側機は、交差点等に付随して道路近傍に設置される無線通信装置であり、当該交差点の位置情報や交通信号機の信号現示期間に関する信号時間情報を含むインフラ情報を、付近を走行する車両に対して送信する。このうち、信号時間情報には、信号の切替時期や停止信号の残り時間等を示す情報が含まれている。停止信号の残り時間とは、停止信号を現示中において現時点から次の進行信号に切替わるまでに要する時間である。例えば、停止信号の残り時間が60秒を示している場合、この情報が出力された時点で、その交差点における自車両の進路方向の交通信号機は停止信号(赤信号)を現示しており、かつ、情報が出力された時点から60秒後に進行信号(青信号)に切替わることを示している。
【0129】
図13において、回転数センサ30は、自車両のエンジンの回転数を検知するためのセンサである。また、変速機制御部31は、自車両の走行状態(車速やエンジン回転数)に応じて自動変速機の最適な変速段の決定及び切替えをする電子制御装置である。
【0130】
第2条件判定部15には、自車両の位置座標や進行方位を示す情報に加え、無線受信部14を介して受信した信号時間情報や、車速センサ23からの車速情報、エンジンの回転数を検知する回転数センサ30からのエンジン回転数情報、変速機制御部31において検知された現在選択中の変速段(以下、シフト位置)を示すシフト位置情報等が入力される。そして、第2条件判定部15からは、第2条件の成否を示す第2条件フラグに加えて、シフト位置を低速側に変更するためのダウンシフト指令を変速機制御部31に対して出力する。
【0131】
図14は、上記第6実施形態のアイドリングストップ制御装置1の第2条件判定部15において実行される第2条件判定処理(第6実施形態)の手順を示すフローチャートである。なお、図14のフローチャートにおいては、図5に示す第1実施形態のフローチャートから変更のある部分を主に記載し、変更のない共通部分については記載を省略している。また、図14のフローチャートにおいてステップ番号が図5のフローチャートと同一の処理については、特に説明しない限りは同一の処理内容であるものとして扱い、同じ説明は繰返さない。
【0132】
第6実施形態の第2条件判定処理では、S213の処理の後にS701〜S704の処理が追加された点で第1実施形態の第2条件判定処理と異なる。S213で肯定判定をした場合(S213:YES)、すなわち、平均アクセル度が第2条件の成立に必要な値を満足している場合、次のS701では、自車両の進路前方の交差点における停止信号の残り時間が規定の閾値thSよりも長いか否かを判定する。なお、停止信号の残り時間は、無線受信部14を介して受信した最新のインフラ情報に基づいて特定する。
【0133】
S701で停止信号の残り時間が閾値thSよりも長いと判定した場合(S701:YES)、S214の処理へ進み、第2条件フラグの値を「1」にセットする。一方、停止信号の残り時間が閾値thSよりも短い、あるいは現時点で停止信号が現示されていない場合(S701:NO)、第2条件フラグを「0(不成立)」にセットしたままS702の処理へ進む。
【0134】
S701で停止信号の残り時間が閾値thSよりも長いと判定されたということは、この停止信号に従って所定時間以上停車する可能性が高いことを示している。よって、この場合は、アイドリングストップを実施するのに好適な条件であるとして、第2条件成立(第2条件フラグ=1)と判定するようになっている。
【0135】
一方、S701で停止信号の残り時間が閾値thSよりも短い、あるいは現時点で停止信号が現示されていないと判定されたということは、交差点に差し掛かった時点で進行信号になっていたり、停止信号による停止時間が短い可能性が高いことを示している。よって、この場合は、アイドリングストップを実施しても燃費の向上が期待できないとして、第2条件不成立(第2条件フラグ=0)と判定する一方、次のS702以降の処理で第2条件判定部15による自動変速機の協調制御を実施することで燃費の向上を図るようになっている。
【0136】
具体的には、S702では、現在のエンジン回転数(ただし、アクセルオフであること)が規定の燃料カット回転数以上であるか否かを判定する。電子制御式の燃料噴射装置においては、通常、アクセルをオフにして惰性で走行しているときのエンジン回転数がエンジンストールしない回転数よりも高い場合には、エンジン内への燃料噴射が停止されることで無駄な燃料消費を抑えるようになっている。この燃料噴射を停止する境界となるエンジン回転数を燃料カット回転数と呼ぶ。なお、燃料カット回転数は、エンジンの回転力を動力源とする機器類(例えば、エアコンのコンプレッサー等)の作動状況や、冷間時において適宜変更されるものである。よって、S702の判定では、その時々で設定されている最新の燃料カット回転数を用いる。
【0137】
S702で現在のエンジン回転数が規定の燃料カット回転数以上であると判定した場合(S702:YES)、すなわち、エンジン内への燃料噴射が停止されている状況では、自動変速機の制御をせずに本処理を終了する。一方、S702で現在のエンジン回転数が規定の燃料カット回転数未満であると判定した場合(S702:NO、すなわち、エンジンストール防止の為に燃料噴射を行っている状況下では、S703の処理へ進む。
【0138】
S703では、現在のシフト位置が1速(最も変速比の低いギア)であるか否かを判定する。現在のシフト位置が1速である場合(S703:YES)、これ以上低いギアが存在しないため、本処理を終了する。一方、現在のシフト位置が1速よりも大きい場合(S703:NO)、シフト位置を低速側へ1段下げるダウンシフト指令を変速機制御部31に対して出力し(S704)、本処理を終了する。
【0139】
上記第6実施形態の構成によれば、周辺車両の走行状況(平均アクセル度)に加えて、インフラ情報に基づく停止信号の残り時間も考慮して、長時間の停止が見込まれる場合に第2条件が成立すると判定することで、燃費向上に貢献するアイドリングストップを的確に実施できると共に、変速機制御に係る電力消費を低減できる。
【0140】
一方、停止信号の残り時間に基づき長時間の停止が見込まれない場合、エンジン回転数が燃料カット回転数以上になるように変速機をシフトダウンさせることができる。このようにすることで、アイドリングストップが短時間しか見込めない状況下においても、積極的なシフトダウンでエンジンの回転数を高く維持することによる燃料カットで減速中における燃料消費を低減できる。
【0141】
また、このようにすることで、減速過程から再加速する状況に転向した時には、シフト位置が低速度からの加速に適した低いギアに予めなっており、再加速に対する即応性が向上する。特に、アイドリングストップによるエンジン停止状態からエンジンを始動して変速機の立ち上がり(油圧の上昇)を待つ場合に比べて、再加速する状況に転向した時点で予めエンジンが作動中で、変速機も低速ギアを選択している状態になっているため、加速を開始するまでに要する時間を低減できる。
【0142】
なお、上記第6実施形態では、変速比を段階的に切替える機構を有する自動変速機を適用した事例を挙げたが、変速比を連続的に変化させる無断変速機(CVT)を適用してもよい。その場合、S703の判断処理では、変速比が最低速であるか否かについて判断し、S704では、変速段を切替える指示に代えて変速比を下げる指示を出力するものとする。
【0143】
また、上述のS702の判断処理では、「エンジン回転数≧燃料カット回転数」という判断基準を用いているため、S702で否定判定(NO)をした時点で既に燃料噴射が行われていることになっている。これに対し、S702に「エンジン回転数≧燃料カット回転数+α(例えばα=100rpm)」という判断基準を採用すれば、減速時の燃料噴射が行われる前にS703の処理へ移行することが可能になる。このようにすることで、S702で否定判定(NO)をした時点で最も高いギアを選択していたとしても、減速過程において燃料を噴射することなく最も低いギアまでシフトダウンすることも可能となる。
【0144】
なお、上記第6実施形態の第2条件判定処理では、周辺車両のアクセル度を演算し、これを判断要素に採用する構成(第1〜4実施形態)を前提としているが、当然ながら、第5実施形態におけるアクセルオフ度を判断要素に採用する構成を前提とするように構成することもできる。
【0145】
[第7実施形態]
図15は、第2条件判定処理の変形例(第7実施形態)の手順を示すフローチャートである。なお、図15のフローチャートにおいては、図5に示す第1実施形態のフローチャートから変更のある部分を主に記載し、変更のない共通部分については記載を省略している。また、図15のフローチャートにおいてステップ番号が図5のフローチャートと同一の処理については、特に説明しない限りは同一の処理内容であるものとして扱い、同じ説明は繰返さない。
【0146】
第7実施形態の第2条件判定処理は、上述の第6実施形態の第2条件判定処理(図14参照)の手順から、変速機の協調制御に関する処理(S702〜S704)を除外したものに相当する。すなわち、第7実施形態は、無線受信部14を介して信号時間情報を含むインフラ情報を取得し、このインフラ情報を第2条件の成否の判定に利用する点で特徴的である。
【0147】
第7実施形態の第2条件判定処理では、S213の処理の後にS701の処理が追加された点で第1実施形態の第2条件判定処理と異なる。S213で肯定判定をした場合(S213:YES)、すなわち、平均アクセル度が第2条件の成立に必要な値を満足している場合、次のS701では、自車両の進路前方の交差点における停止信号の残り時間が規定の閾値thSよりも長いか否かを判定する。なお、停止信号の残り時間は、無線受信部14を介して受信した最新のインフラ情報に基づいて特定する。
【0148】
S701で停止信号の残り時間が閾値thSよりも長いと判定した場合(S701:YES)、S214の処理へ進み、第2条件フラグの値を「1」にセットする。一方、停止信号の残り時間が閾値thSよりも短い、あるいは現時点で停止信号が現示されていない場合(S701:NO)、第2条件フラグを「0(不成立)」にセットしたまま本処理を終了する。
【0149】
S701で停止信号の残り時間が閾値thSよりも長いと判定されたということは、この停止信号に従って所定時間以上停車する可能性が高いことを示している。よって、この場合は、アイドリングストップを実施するのに好適な条件であるとして、第2条件成立(第2条件フラグ=1)と判定するようになっている。
【0150】
一方、S701で停止信号の残り時間が閾値thSよりも短い、あるいは現時点で停止信号が現示されていないと判定されたということは、交差点に差し掛かった時点で進行信号になっていたり、停止信号による停止時間が短い可能性が高いことを示している。よって、この場合は、アイドリングストップを実施しても燃費の向上が期待できないとして、第2条件不成立(第2条件フラグ=0)と判定するようになっている。
【0151】
上記第7実施形態の構成によれば、周辺車両の走行状況(平均アクセル度)に加えて、インフラ情報に基づく停止信号の残り時間も考慮して、長時間の停止が見込まれる場合に第2条件が成立すると判定することで、燃費向上に貢献するアイドリングストップを的確に実施できる。
【0152】
なお、上記第7実施形態の第2条件判定処理では、インフラ情報に基づく停止信号の残り時間を第2条件の判断要素に採用する構成としたが、これに代えて、インフラ情報に基づく交差点までの距離を第2条件の判断要素に採用するように構成してもよい。具体的には、自車両の現在位置から交差点までの距離に応じて、第2条件の成否を分岐する。このようにすることで、交差点を要因とする交通流の波及度合を反映した態様にてアイドリングストップの可否を判断できる。
【0153】
[その他の実施形態]
上述した第1〜7の各実施形態は、互いに相反する技術内容でない限り適宜組合せて実施してもよい。また、アクセル度やアクセルオフ度といった周辺車両のアクセル開度に基づいた指標を用いて第2条件の成否を判定する他に、単に周辺車両の速度を指標とする第2条件を設定して、その成否を判定する構成であってもよい。
【0154】
[実施形態の構成と特許請求の範囲に記載の構成との対応]
上記実施形態のアイドリングストップ制御装置の各部構成と、特許請求の範囲に記載の構成との対応は次のとおりである。
【0155】
アイドリングストップ制御装置1の無線受信部14が、特許請求の範囲における周辺車両情報取得手段、信号情報取得手段、交差点情報取得手段、及び、距離情報取得手段に相当する。また、第1条件判定部13が第1条件判定手段に相当する。また、第2条件判定部15が、第2条件判定手段及びシフトダウン指示手段に相当する。また、IS指令出力部17がアイドリングストップ制御手段に相当する。また、車両データ記憶部16が記憶手段に相当する。また、位置演算部12が、位置情報取得部及び位置方位情報取得部に相当する。また、情報取得部10がウインカ情報取得手段に相当する。
【符号の説明】
【0156】
1…アイドリングストップ制御装置、10…情報取得部、12…位置演算部、14…無線受信部、16…車両データ記憶部、18…無線送信部、11…判定部、13…第1条件判定部、15…第2条件判定部、17…IS指令出力部、21…GPS受信機、22…方位センサ、23…車速センサ、24…アクセル開度センサ、25…ウインカ制御部、26…バッテリセンサ、27…スタータ故障検知部、28…エンジン制御部、29…ナビゲーションECU、30…回転数センサ、31…変速機制御部。
【特許請求の範囲】
【請求項1】
自車両の周辺に存在する周辺車両の状態に関する周辺車両情報を取得する周辺車両情報取得手段と、
自車両の状態を判定要素にして、アイドリングストップを実施可能とするための自車両の都合に関する所定の第1条件が成立するか否かを判定する第1条件判定手段と、
前記周辺車両情報取得手段により取得した周辺車両情報で示される前記周辺車両の状態を判定要素にして、アイドリングストップを実施可能とするための周辺車両による都合に関する所定の第2条件が成立するか否かを判定する第2条件判定手段と、
前記第1条件判定手段及び前記第2条件判定手段の判定結果に基づき、前記第1条件及び前記第2条件の双方が成立することを条件に、自車両のエンジン制御手段に対してアイドリングストップを指示するアイドリングストップ制御手段とを備えること
を特徴とする車両に搭載されるアイドリングストップ制御装置。
【請求項2】
請求項1に記載のアイドリングストップ制御装置において、
前記第2条件判定手段は、自車両の進路前方を先行する先行車両を特定し、その特定した先行車両に該当する周辺車両情報のみに基づき、前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項3】
請求項1又は請求項2に記載のアイドリングストップ制御装置において、
前記周辺車両情報取得手段は、前記周辺車両のアクセル開度に関する情報を含む周辺車両情報を取得し、
前記第2条件は、前記周辺車両のアクセル開度の状況に関する条件を含むものであって、
前記第2条件判定手段は、前記周辺車両情報で示される前記周辺車両のアクセル開度の状況に基づき、前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項4】
請求項1ないし請求項3の何れか1項に記載のアイドリングストップ制御装置において、
前記周辺車両情報取得手段は、前記周辺車両の速度に関する情報を含む周辺車両情報を取得し、
前記第2条件は、前記周辺車両の速度に関する条件を含むものであって、
前記第2条件判定手段は、前記周辺車両情報で示される前記周辺車両の速度に基づき、前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項5】
請求項3に記載のアイドリングストップ制御装置において、
前記周辺車両情報取得手段により取得した周辺車両情報を時系列に記憶する記憶手段を更に備え、
前記第2条件は、前記周辺車両の時系列のアクセル開度の積算値に関する条件を含むものであって、
前記第2条件判定手段は、前記記憶手段が記憶している時系列の周辺車両情報で示されるアクセル開度を、前記周辺車両情報の取得時期が古い程小さくなる時間重みを付けて積算し、この加重積算の算出結果に応じて前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項6】
請求項3に記載のアイドリングストップ制御装置において、
前記自車両の現在位置に関する位置情報を取得する位置情報取得手段を更に備え、
前記周辺車両情報取得手段により取得した周辺車両情報、及び、前記位置情報取得手段により取得した位置情報を時系列に記憶する記憶手段を更に備え、
前記第2条件は、前記周辺車両の時系列のアクセル開度の積算値に関する条件を含むものであって、
前記第2条件判定手段は、前記記憶手段が記憶している時系列の周辺車両情報で示されるアクセル開度を、前記周辺車両情報の取得時期における当該周辺車両とその取得時期に対応する自車両との位置情報から特定した車間距離が大きい程小さくなる距離重みを付けて積算し、この加重積算の算出結果に応じて前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項7】
請求項6に記載のアイドリングストップ制御装置において、
前記第2条件判定手段は、前記距離重みに加え、更に前記周辺車両情報の取得時期が古い程小さくなる時間重みを付けて前記アクセル開度を積算し、この加重積算の算出結果に応じて前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項8】
請求項5ないし請求項7の何れか1項に記載のアイドリングストップ制御装置において、
前記周辺車両情報取得手段は、前記周辺車両のウインカの作動状況を示すウインカ情報を更に含む前記周辺車両情報を取得し、
前記第2条件判定手段は、更に前記周辺車両情報の取得時期におけるウインカの作動状況に応じたウインカ作動重みを付けて前記アクセル開度を積算し、この加重積算の算出結果に応じて前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項9】
請求項1ないし請求項8の何れか1項に記載のアイドリングストップ制御装置において、
自車両の進路前方の交差点の位置に関する情報を含む交差点情報を取得する交差点情報取得手段と、
前記自車両の現在位置に関する位置情報を取得する位置情報取得手段とを更に備え、
前記第2条件は、自車両の現在位置と進路前方の交差点との所定の位置関係に関する条件を含むものであって、
前記第2条件判定手段は、更に前記交差点情報取得手段により取得した交差点情報と、前記位置情報取得手段により取得した位置情報で示される自車両の現在位置との所定の位置関係を判定要素に加えて、前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項10】
請求項1ないし請求項9の何れか1項に記載のアイドリングストップ制御装置において、
自車両の進路前方の交差点に設置された交通信号機の信号現示の予定に関する情報を含む信号情報を取得する信号情報取得手段を更に備え、
前記第2条件は、自車両の進路前方の交差点に設置された交通信号機における信号の切替時期に関する条件を含むものであって、
前記第2条件判定手段は、更に前記信号情報取得手段により取得した信号情報から特定した信号の切替時期を判定要素に加えて前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項11】
請求項10に記載のアイドリングストップ制御装置において、
前記第2条件判定手段によって、前記周辺車両情報に関する判定要素が前記第2条件の成立要件を満たし、かつ、信号の切替時期に関する判定要素が前記第2条件の成立要件を満たさないと判定された場合、自車両の変速機のシフトポジションを制御するシフト制御手段に対してシフトダウンを指示するシフトダウン指示手段とを更に備えること
を特徴とするアイドリングストップ制御装置。
【請求項12】
請求項11に記載のアイドリングストップ制御装置において、
前記シフトダウン指示手段は、前記第2条件判定手段による判断結果に加え、更に自車両の現在のエンジン回転数と、アクセル全閉時にエンジンへの燃料供給をカットするための条件である燃料カット回転数とが所定の関係になっていることを条件にシフトダウンを指示すること
を特徴とするアイドリングストップ制御装置。
【請求項13】
請求項2、又は請求項2を引用する請求項3ないし請求項12の何れか1項に記載のアイドリングストップ制御装置において、
前記自車両の現在位置及び進行方位を示す位置方位情報を取得する位置方位情報取得手段を更に備え、
前記周辺車両情報取得手段は、前記周辺車両の現在位置及び進行方位を示す位置方位情報を含む前記周辺車両情報を取得し、
前記第2条件判定手段は、前記位置方位情報取得手段により取得した位置方位情報で示される自車両の現在位置及び進行方位と、前記周辺車両情報取得手段により取得した位置方位情報で示される前記周辺車両の現在位置及び進行方位との関係に基づいて、自車両の進路前方を先行する先行車両を特定すること
を特徴とするアイドリングストップ制御装置。
【請求項14】
請求項13に記載のアイドリングストップ制御装置において、
前記第2条件判定手段は、自車両の現在位置から進行方位に向けて延びる仮想進路上に位置する前記周辺車両であって、その周辺車両の進行方位と自車両の進行方位との差が所定範囲内である条件を満たすものを前記先行車両として特定すること
を特徴とするアイドリングストップ制御装置。
【請求項15】
請求項13又は請求項14に記載のアイドリングストップ制御装置において、
自車両の現在位置から進路前方の交差点までの距離を取得する距離情報取得手段と、
前記自車両のウインカの作動状況を示すウインカ情報を取得するウインカ情報取得手段とを更に備え、
前記第2条件判定手段は、自車両から前記交差点までの距離が所定値以内の条件下において自車両のウインカが左右何れかの方向を指示する作動状態である場合、当該交差点の位置を始点に自車両の現在の進行方位にウインカの指示方向を加えた方向に向けて延びる仮想進路上を先行する前記周辺車両を前記先行車両として特定すること
を特徴とするアイドリングストップ制御装置。
【請求項16】
請求項2、又は請求項2を引用する請求項3ないし請求項12の何れか1項に記載のアイドリングストップ制御装置において、
前記周辺車両情報取得手段は、前記周辺車両の現在位置及び進行方位を示す位置方位情報を含む前記周辺車両情報を取得し、
前記第2条件判定手段は、自車両が走行する予定の経路である走行予定経路に関する経路情報を取得し、この取得した経路情報で示される走行予定経路と、前記周辺車両情報取得手段により取得した位置方位情報で示される前記周辺車両の現在位置及び進行方位とに基づき、前記走行予定経路上を先行する前記周辺車両を前記先行車両として特定すること
を特徴とするアイドリングストップ制御装置。
【請求項1】
自車両の周辺に存在する周辺車両の状態に関する周辺車両情報を取得する周辺車両情報取得手段と、
自車両の状態を判定要素にして、アイドリングストップを実施可能とするための自車両の都合に関する所定の第1条件が成立するか否かを判定する第1条件判定手段と、
前記周辺車両情報取得手段により取得した周辺車両情報で示される前記周辺車両の状態を判定要素にして、アイドリングストップを実施可能とするための周辺車両による都合に関する所定の第2条件が成立するか否かを判定する第2条件判定手段と、
前記第1条件判定手段及び前記第2条件判定手段の判定結果に基づき、前記第1条件及び前記第2条件の双方が成立することを条件に、自車両のエンジン制御手段に対してアイドリングストップを指示するアイドリングストップ制御手段とを備えること
を特徴とする車両に搭載されるアイドリングストップ制御装置。
【請求項2】
請求項1に記載のアイドリングストップ制御装置において、
前記第2条件判定手段は、自車両の進路前方を先行する先行車両を特定し、その特定した先行車両に該当する周辺車両情報のみに基づき、前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項3】
請求項1又は請求項2に記載のアイドリングストップ制御装置において、
前記周辺車両情報取得手段は、前記周辺車両のアクセル開度に関する情報を含む周辺車両情報を取得し、
前記第2条件は、前記周辺車両のアクセル開度の状況に関する条件を含むものであって、
前記第2条件判定手段は、前記周辺車両情報で示される前記周辺車両のアクセル開度の状況に基づき、前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項4】
請求項1ないし請求項3の何れか1項に記載のアイドリングストップ制御装置において、
前記周辺車両情報取得手段は、前記周辺車両の速度に関する情報を含む周辺車両情報を取得し、
前記第2条件は、前記周辺車両の速度に関する条件を含むものであって、
前記第2条件判定手段は、前記周辺車両情報で示される前記周辺車両の速度に基づき、前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項5】
請求項3に記載のアイドリングストップ制御装置において、
前記周辺車両情報取得手段により取得した周辺車両情報を時系列に記憶する記憶手段を更に備え、
前記第2条件は、前記周辺車両の時系列のアクセル開度の積算値に関する条件を含むものであって、
前記第2条件判定手段は、前記記憶手段が記憶している時系列の周辺車両情報で示されるアクセル開度を、前記周辺車両情報の取得時期が古い程小さくなる時間重みを付けて積算し、この加重積算の算出結果に応じて前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項6】
請求項3に記載のアイドリングストップ制御装置において、
前記自車両の現在位置に関する位置情報を取得する位置情報取得手段を更に備え、
前記周辺車両情報取得手段により取得した周辺車両情報、及び、前記位置情報取得手段により取得した位置情報を時系列に記憶する記憶手段を更に備え、
前記第2条件は、前記周辺車両の時系列のアクセル開度の積算値に関する条件を含むものであって、
前記第2条件判定手段は、前記記憶手段が記憶している時系列の周辺車両情報で示されるアクセル開度を、前記周辺車両情報の取得時期における当該周辺車両とその取得時期に対応する自車両との位置情報から特定した車間距離が大きい程小さくなる距離重みを付けて積算し、この加重積算の算出結果に応じて前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項7】
請求項6に記載のアイドリングストップ制御装置において、
前記第2条件判定手段は、前記距離重みに加え、更に前記周辺車両情報の取得時期が古い程小さくなる時間重みを付けて前記アクセル開度を積算し、この加重積算の算出結果に応じて前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項8】
請求項5ないし請求項7の何れか1項に記載のアイドリングストップ制御装置において、
前記周辺車両情報取得手段は、前記周辺車両のウインカの作動状況を示すウインカ情報を更に含む前記周辺車両情報を取得し、
前記第2条件判定手段は、更に前記周辺車両情報の取得時期におけるウインカの作動状況に応じたウインカ作動重みを付けて前記アクセル開度を積算し、この加重積算の算出結果に応じて前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項9】
請求項1ないし請求項8の何れか1項に記載のアイドリングストップ制御装置において、
自車両の進路前方の交差点の位置に関する情報を含む交差点情報を取得する交差点情報取得手段と、
前記自車両の現在位置に関する位置情報を取得する位置情報取得手段とを更に備え、
前記第2条件は、自車両の現在位置と進路前方の交差点との所定の位置関係に関する条件を含むものであって、
前記第2条件判定手段は、更に前記交差点情報取得手段により取得した交差点情報と、前記位置情報取得手段により取得した位置情報で示される自車両の現在位置との所定の位置関係を判定要素に加えて、前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項10】
請求項1ないし請求項9の何れか1項に記載のアイドリングストップ制御装置において、
自車両の進路前方の交差点に設置された交通信号機の信号現示の予定に関する情報を含む信号情報を取得する信号情報取得手段を更に備え、
前記第2条件は、自車両の進路前方の交差点に設置された交通信号機における信号の切替時期に関する条件を含むものであって、
前記第2条件判定手段は、更に前記信号情報取得手段により取得した信号情報から特定した信号の切替時期を判定要素に加えて前記第2条件が成立するか否かを判定すること
を特徴とするアイドリングストップ制御装置。
【請求項11】
請求項10に記載のアイドリングストップ制御装置において、
前記第2条件判定手段によって、前記周辺車両情報に関する判定要素が前記第2条件の成立要件を満たし、かつ、信号の切替時期に関する判定要素が前記第2条件の成立要件を満たさないと判定された場合、自車両の変速機のシフトポジションを制御するシフト制御手段に対してシフトダウンを指示するシフトダウン指示手段とを更に備えること
を特徴とするアイドリングストップ制御装置。
【請求項12】
請求項11に記載のアイドリングストップ制御装置において、
前記シフトダウン指示手段は、前記第2条件判定手段による判断結果に加え、更に自車両の現在のエンジン回転数と、アクセル全閉時にエンジンへの燃料供給をカットするための条件である燃料カット回転数とが所定の関係になっていることを条件にシフトダウンを指示すること
を特徴とするアイドリングストップ制御装置。
【請求項13】
請求項2、又は請求項2を引用する請求項3ないし請求項12の何れか1項に記載のアイドリングストップ制御装置において、
前記自車両の現在位置及び進行方位を示す位置方位情報を取得する位置方位情報取得手段を更に備え、
前記周辺車両情報取得手段は、前記周辺車両の現在位置及び進行方位を示す位置方位情報を含む前記周辺車両情報を取得し、
前記第2条件判定手段は、前記位置方位情報取得手段により取得した位置方位情報で示される自車両の現在位置及び進行方位と、前記周辺車両情報取得手段により取得した位置方位情報で示される前記周辺車両の現在位置及び進行方位との関係に基づいて、自車両の進路前方を先行する先行車両を特定すること
を特徴とするアイドリングストップ制御装置。
【請求項14】
請求項13に記載のアイドリングストップ制御装置において、
前記第2条件判定手段は、自車両の現在位置から進行方位に向けて延びる仮想進路上に位置する前記周辺車両であって、その周辺車両の進行方位と自車両の進行方位との差が所定範囲内である条件を満たすものを前記先行車両として特定すること
を特徴とするアイドリングストップ制御装置。
【請求項15】
請求項13又は請求項14に記載のアイドリングストップ制御装置において、
自車両の現在位置から進路前方の交差点までの距離を取得する距離情報取得手段と、
前記自車両のウインカの作動状況を示すウインカ情報を取得するウインカ情報取得手段とを更に備え、
前記第2条件判定手段は、自車両から前記交差点までの距離が所定値以内の条件下において自車両のウインカが左右何れかの方向を指示する作動状態である場合、当該交差点の位置を始点に自車両の現在の進行方位にウインカの指示方向を加えた方向に向けて延びる仮想進路上を先行する前記周辺車両を前記先行車両として特定すること
を特徴とするアイドリングストップ制御装置。
【請求項16】
請求項2、又は請求項2を引用する請求項3ないし請求項12の何れか1項に記載のアイドリングストップ制御装置において、
前記周辺車両情報取得手段は、前記周辺車両の現在位置及び進行方位を示す位置方位情報を含む前記周辺車両情報を取得し、
前記第2条件判定手段は、自車両が走行する予定の経路である走行予定経路に関する経路情報を取得し、この取得した経路情報で示される走行予定経路と、前記周辺車両情報取得手段により取得した位置方位情報で示される前記周辺車両の現在位置及び進行方位とに基づき、前記走行予定経路上を先行する前記周辺車両を前記先行車両として特定すること
を特徴とするアイドリングストップ制御装置。
【図1】

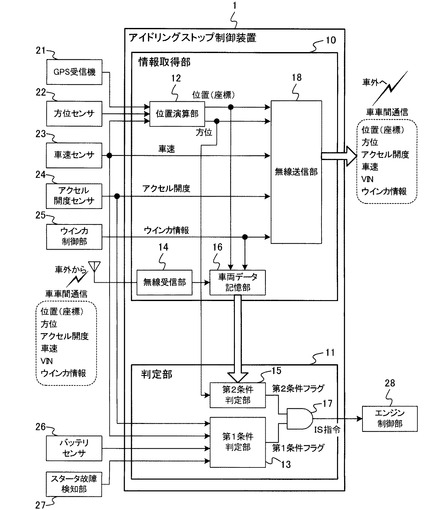
【図2】
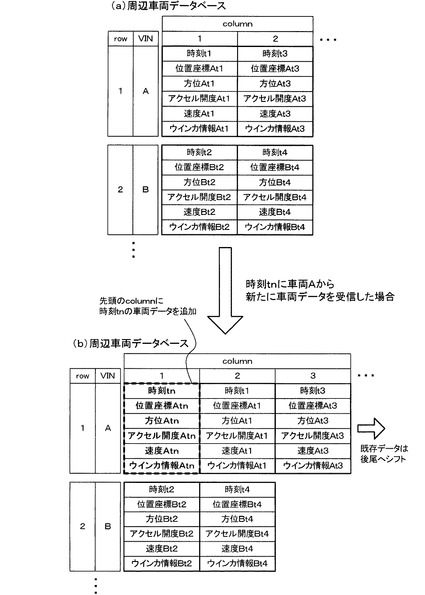
【図3】
【図4】
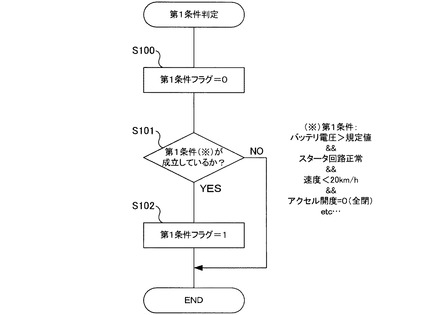
【図5】
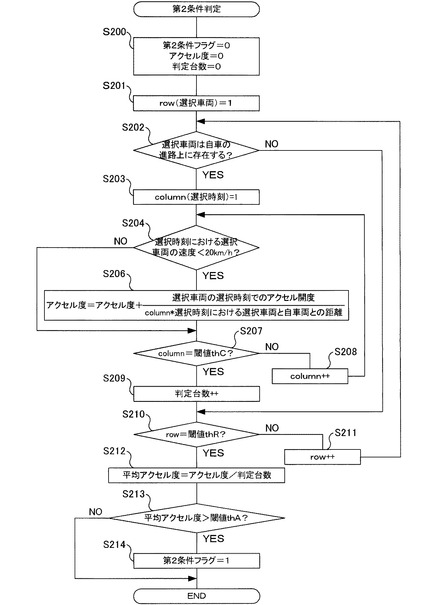
【図7】
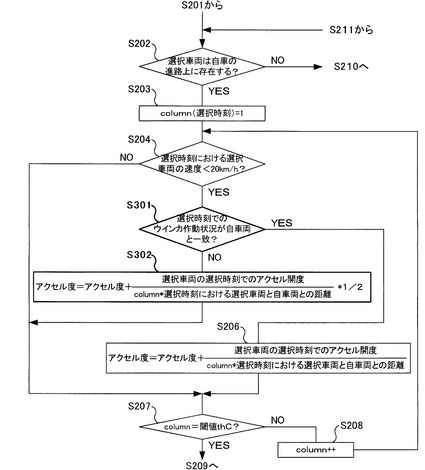
【図8】
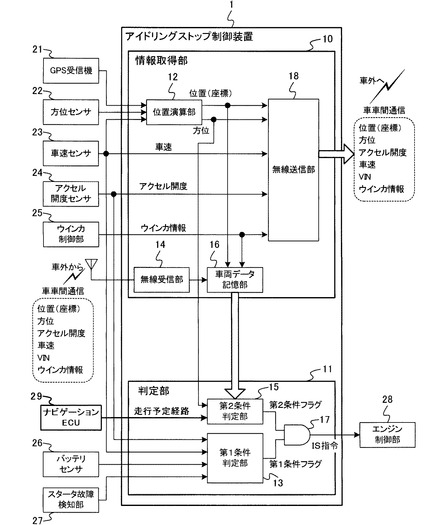
【図9】
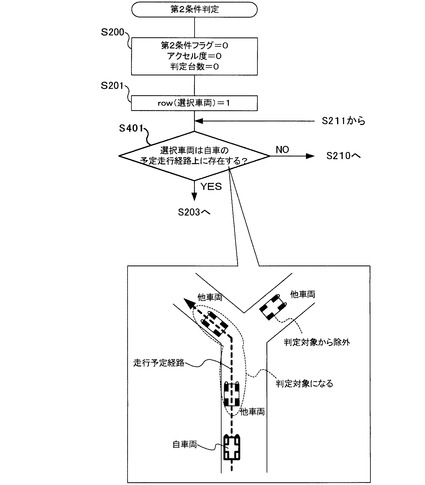
【図10】
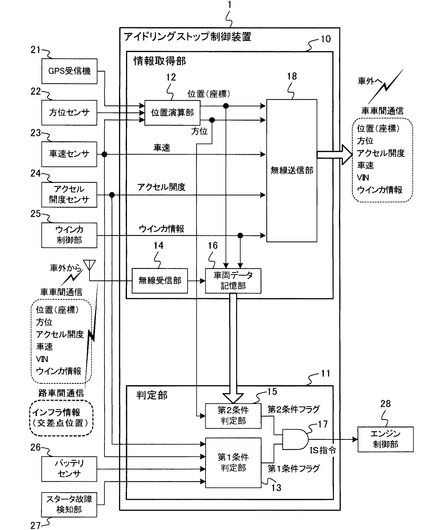
【図11】
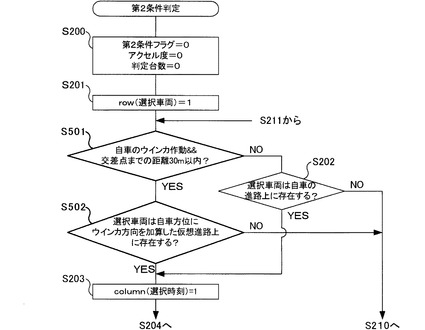
【図12】
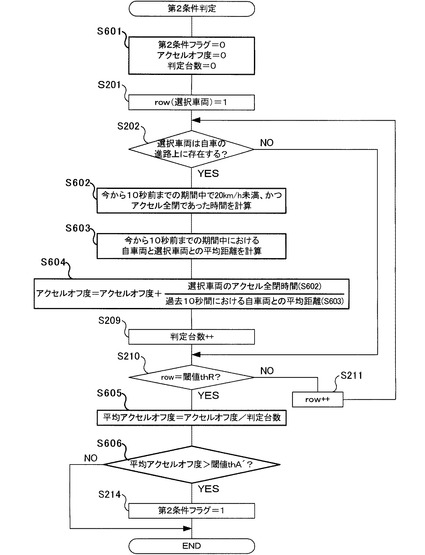
【図13】
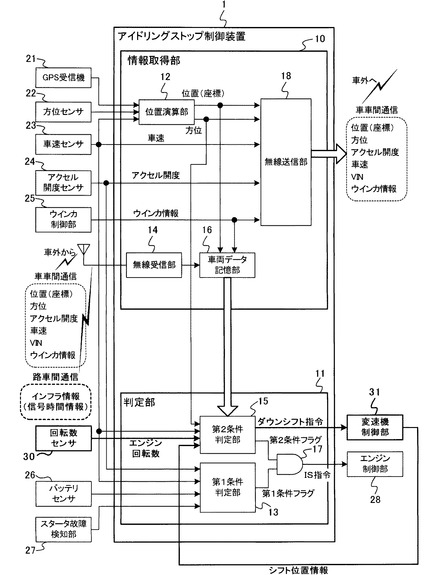
【図14】
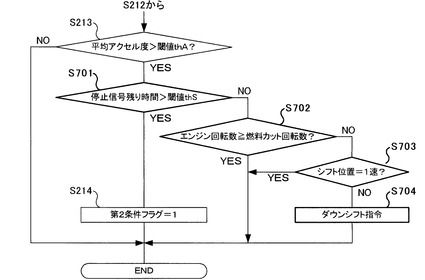
【図15】
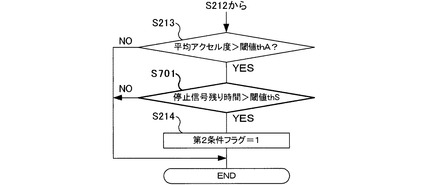
【図6】
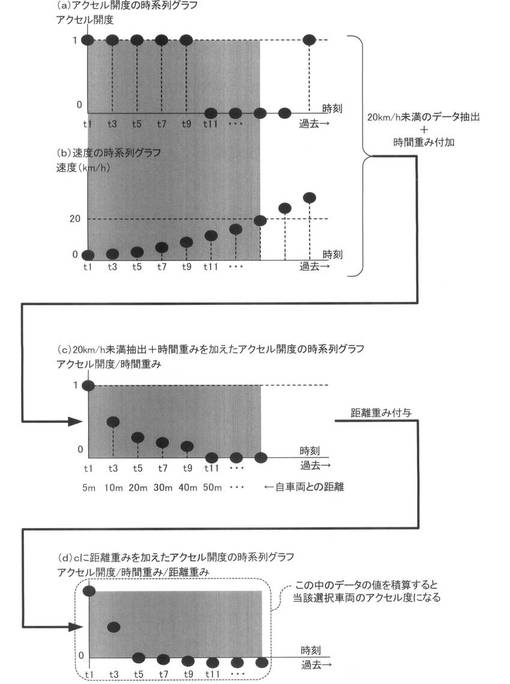
【図2】
【図3】
【図4】
【図5】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図6】
【公開番号】特開2012−57597(P2012−57597A)
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願番号】特願2010−204588(P2010−204588)
【出願日】平成22年9月13日(2010.9.13)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願日】平成22年9月13日(2010.9.13)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]