
アーク放電評価方法

【課題】アーク放電状態を確実に評価できるアーク放電評価方法を提供する。
【解決手段】金属ターゲットの表面を複数回撮影して、アーク放電状態を複数の解析画像データとして取得する画像取得工程S30と、画像取得工程S30にて撮影した解析画像データの所定の位置を原点として、各解析画像データを座標データに変換する変換工程S50と、座標データと所定の閾値とを比較することで、座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程S60と、抽出座標データを回帰して、抽出座標データの二次関数と二次関数の相関係数rとを算出し、二次関数の二次項aと二次関数の相関係数rとをアーク放電状態の特徴量として取得する特徴量取得工程S80と、を行う。
【解決手段】金属ターゲットの表面を複数回撮影して、アーク放電状態を複数の解析画像データとして取得する画像取得工程S30と、画像取得工程S30にて撮影した解析画像データの所定の位置を原点として、各解析画像データを座標データに変換する変換工程S50と、座標データと所定の閾値とを比較することで、座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程S60と、抽出座標データを回帰して、抽出座標データの二次関数と二次関数の相関係数rとを算出し、二次関数の二次項aと二次関数の相関係数rとをアーク放電状態の特徴量として取得する特徴量取得工程S80と、を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カソードとアノードとの間に発生させるアーク放電の状態を評価するアーク放電評価方法に関する。
【背景技術】
【0002】
従来から、自動車部品の摺動性や耐摩耗性等を向上させるために、真空アーク蒸着装置によって自動車部品に硬質薄膜コーティング(例えば、DLC(Diamond Like Carbon)コーティング等)を施している。
真空アーク蒸着装置は、真空容器内に配置される金属ターゲット(カソード)と金属ターゲットより離間して配置される電極(アノード)との間でアーク放電を発生させ、金属ターゲットの表面を昇華させて金属イオンを発生させる。そして、真空アーク蒸着装置は、金属イオンをワークの表面に堆積させることで、ワークに硬質薄膜コーティングを施す。
【0003】
生産設備に複数の真空アーク蒸着装置を設置して、製品の成膜品質を同質にする場合、制御因子を測定して、制御因子と成膜品質との関係を明確にする必要がある。
このような制御因子の一つとして、アーク放電状態、つまり、アークスポット(陰極点)の動きが考えられる。アークスポットは、金属ターゲットの表面で高温状態となる部分であり、多くの金属イオンが発生する。
すなわち、制御因子と成膜品質との関係を明確にするためには、アーク放電状態を定量的に評価する必要がある。
【0004】
特許文献1に開示される技術では、CCDカメラ等によりアークやアーク周囲を撮影し、撮影した画像より略楕円状の高輝度部(アーク)を抽出する。そして、高輝度部の重心、長軸、および短軸等に基づいて、溶接トーチのウィービング動作の補正量を定量的に評価する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−42067号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示される技術では、高輝度部の重心等を算出するため、高輝度部が閉じた形状であることが前提となっている。アークスポットは、その形状が非常に小さく、また、金属ターゲットの表面をランダムに高速移動するため、アークスポットの移動軌跡を繋いで高輝度部を抽出する場合、高輝度部が閉じた形状とならない可能性がある。
従って、高輝度部を抽出しても、アークスポットを適切に抽出できない可能性がある。つまり、特許文献1に開示される技術では、アーク放電状態を確実に評価できない可能性がある。
【0007】
本発明は、以上の如き状況を鑑みてなされたものであり、アーク放電状態を確実に評価できるアーク放電評価方法を提供するものである。
【課題を解決するための手段】
【0008】
請求項1においては、カソードの表面を複数回撮影または前記カソードの表面温度を複数回測定して、前記カソードとアノードとの間に発生させるアーク放電の状態を、複数の解析画像データとして取得する画像取得工程と、前記画像取得工程にて撮影した解析画像データの所定の位置を原点として、前記各解析画像データを座標データに変換する変換工程と、前記座標データと所定の閾値とを比較することで、前記座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程と、前記抽出した座標データを二次関数で回帰して、前記二次関数の二次項と前記二次関数の相関係数とを前記アーク放電状態の特徴量として取得する特徴量取得工程と、を行う、ものである。
【0009】
請求項2においては、前記二次関数の二次項および前記二次関数の相関係数の関係に基づいて、前記アーク放電状態を良否判定する良否判定工程、をさらに行う、ものである。
【0010】
請求項3においては、カソードの表面を複数回撮影または前記カソードの表面温度を複数回測定して、前記カソードとアノードとの間に発生させるアーク放電の状態を、複数の解析画像データとして取得する画像取得工程と、前記画像取得工程にて撮影した解析画像データの所定の位置を原点として、前記解析画像データを座標データに変換する変換工程と、前記座標データと所定の閾値とを比較することで、前記座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程と、前記座標データの原点から前記抽出した座標データまで距離の平均と前記距離の分散とを算出し、前記距離の平均と前記距離の分散とを前記アーク放電状態の特徴量として取得する特徴量取得工程と、を行う、ものである。
【0011】
請求項4においては、前記距離の平均および前記距離の分散の関係に基づいて、前記アーク放電状態を良否判定する良否判定工程、をさらに行う、ものである。
【0012】
請求項5においては、カソードの表面を複数回撮影または前記カソードの表面温度を複数回測定して、前記カソードとアノードとの間に発生させるアーク放電の状態を、複数の解析画像データとして取得する画像取得工程と、前記画像取得工程にて撮影した解析画像データの所定の位置を原点として、前記解析画像データを座標データに変換する変換工程と、前記座標データと所定の閾値とを比較することで、前記座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程と、前記抽出した座標データを二次関数で回帰するとともに、前記座標データの原点から前記抽出した座標データまで距離の平均と前記距離の分散とを算出し、前記二次関数の二次項と前記二次関数の相関係数と前記距離の平均と前記距離の分散とを前記アーク放電状態の特徴量として取得する特徴量取得工程と、を行う、ものである。
【0013】
請求項6においては、前記二次関数の二次項および前記二次関数の相関係数の関係と、前記距離の平均および前記距離の分散の関係とに基づいて、前記アーク放電状態を良否判定する良否判定工程、をさらに行う、ものである。
【発明の効果】
【0014】
本発明は、アークスポットの移動軌跡が閉じた形状とならない場合でもアーク放電状態を定量化できるため、アーク放電状態を確実に評価できる、という効果を奏する。
【図面の簡単な説明】
【0015】
【図1】アーク放電評価装置の構成を示す図。
【図2】アーク放電評価方法の手順を示す図。
【図3】解析画像データを示す図。
【図4】抽出座標データを示す図。
【図5】回帰した二次関数のグラフを示す図。
【図6】二次関数の二次項および二次関数の相関係数の関係を示す図。
【図7】原点から各抽出座標データまでの距離を示す図。
【図8】距離の平均および距離の分散の関係を示す図。
【図9】生産設備にアーク放電評価装置を適用した状態を示す図。
【図10】アーク放電評価方法を用いて成膜品質を良否判定する手順を示す図。
【図11】二次関数の二次項および二次関数の相関係数の関係から成膜品質を良否判定する状態を示す図。(a)成膜品質が良好であると判定される場合を示す図。(a)成膜品質が良好でないと判定される場合を示す図。
【図12】距離の平均および距離の分散の関係から成膜品質を良否判定する状態を示す図。(a)成膜品質が良好であると判定される場合を示す図。(a)成膜品質が良好でないと判定される場合を示す図。
【図13】各範囲を設定する手順を示す図。
【図14】未使用の金属ターゲットおよび劣化した金属ターゲットにおけるアーク放電状態の特徴量を示す図。(a)二次関数の二次項および二次関数の相関係数の関係を示す図。(b)距離の平均および距離の分散の関係を示す図。
【発明を実施するための形態】
【0016】
以下では、本実施形態のアーク放電評価方法について説明する。
【0017】
本実施形態のアーク放電評価方法は、真空アーク蒸着装置100によってワークWに硬質薄膜コーティング(例えば、DLC(Diamond Like Carbon)コーティング等)を施すときに発生させるアーク放電の状態を評価するものである。
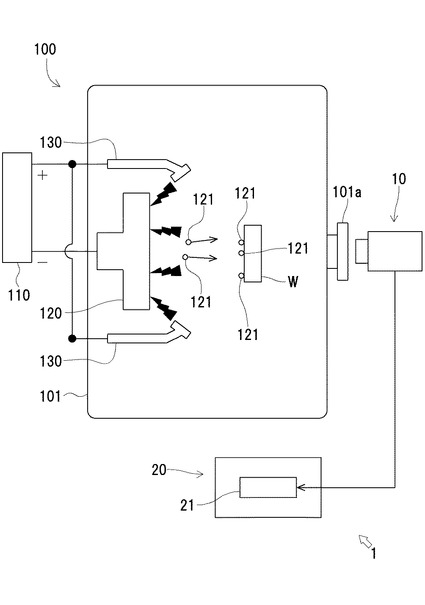
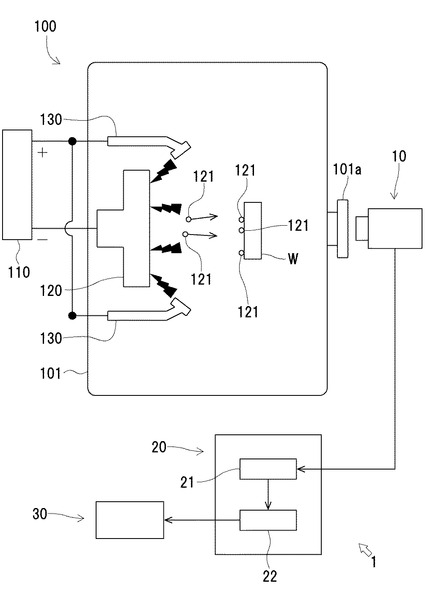
図1に示すように、本実施形態のアーク放電評価方法によるアーク放電評価は、真空アーク蒸着装置100にアーク放電評価装置1を取り付けることによって実施される。
【0018】
まず、真空アーク蒸着装置100について説明する。
真空アーク蒸着装置100は、アーク電源110、金属ターゲット120、および二つの電極130等を具備する。
【0019】
アーク電源110は、陰極側が金属ターゲット120に接続されるとともに陽極側が電極130に接続され、金属ターゲット120と電極130との間にアーク電圧を印加する。
【0020】
金属ターゲット120は、真空容器101内に配置され、アーク電源110よりアーク電圧が印加されてカソード(陰極)となる。金属ターゲット120は、硬質薄膜となる材料(チタン等)によって構成される。
【0021】
電極130は、真空容器101内に配置されるとともに、金属ターゲット120より離間する位置に配置される。電極130は、アーク電源110よりアーク電圧が印加されてアノード(陽極)となる。
【0022】
真空容器101内の金属ターゲット120および電極130より離間する位置には、ワークWが配置される。
【0023】
真空アーク蒸着装置100は、真空ポンプ等により真空容器101内を所定の真空度にして、アーク電源110により金属ターゲット120と電極130との間にアーク電圧を印加する。
そして、真空アーク蒸着装置100は、金属ターゲット120と電極130との間でアーク放電を発生させ、金属ターゲット120の表面を昇華させて金属イオン121を発生させる。そして、真空アーク蒸着装置100は、当該金属イオン121をワークWの表面に堆積させて硬質薄膜を成形する。
【0024】
生産設備に複数の真空アーク蒸着装置100を設置して、各真空アーク蒸着装置100間で製品の成膜品質を同質にする場合、制御因子を測定して、制御因子と成膜品質との関係を明確にする必要がある。
このような制御因子の一つとして、アーク放電状態、つまり、アークスポット100a(陰極点、図3参照)の動きが考えられる。
【0025】
アークスポット100aは、金属ターゲット120の表面で高温状態となる部分である。従って、アークスポット100aが発生している部分では、多くの金属イオン121が発生する。アークスポット100aは、その形状が非常に小さく、金属ターゲット120の表面をランダムに高速移動する。
【0026】
すなわち、制御因子と成膜品質との関係を明確にするためには、アーク放電状態を定量的に評価する必要がある。
アーク放電評価方法は、このようなアーク放電状態を評価するものである。
【0027】
次に、アーク放電評価装置1について説明する。
アーク放電評価装置1は、撮像器10およびデータ解析部20等を具備する。
【0028】
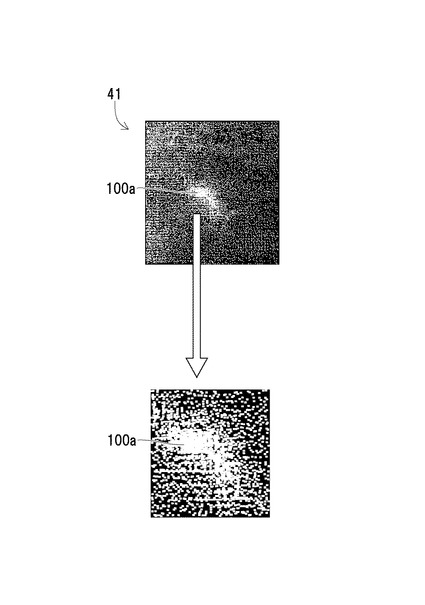
撮像器10は、真空容器101の外側に配置され、真空容器101内を視認可能なのぞき窓101aより金属ターゲット120の表面を撮影する。本実施形態の撮像器10は、CCDカメラによって構成される。撮像器10により撮影された解析画像データ41(図3参照)は、データ解析部20に送信される。
【0029】
なお、撮像器10の構成は、本実施形態に限定されるものでなく、例えば、赤外線カメラであっても構わない。
【0030】
データ解析部20は、解析画像データ41を記録するとともに解析画像データ41を解析し、アーク放電状態を評価するものである。データ解析部20は、演算部21等を備える。
【0031】
演算部21は、アーク放電評価方法に関する種々の演算処理を行う。
【0032】
データ解析部20は、例えば、市販のパーソナルコンピュータで所定のプログラムを実行することにより動作する。
【0033】
次に、アーク放電評価装置1を用いて行うアーク放電評価方法の手順について説明する。
【0034】
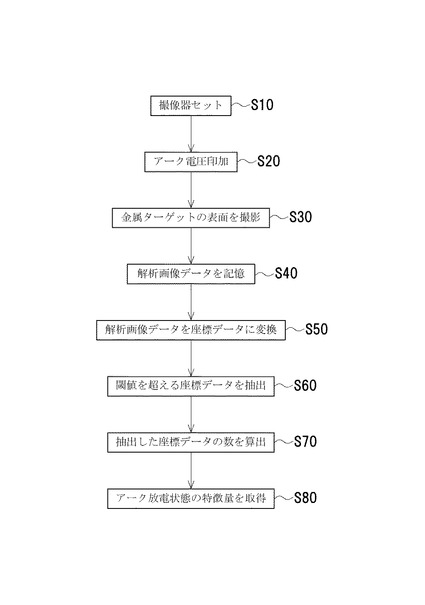
まず、図1および図2に示すように、アーク放電評価方法では、真空容器101ののぞき窓101aより金属ターゲット120の表面を撮影可能となるように、真空容器101の外側に撮像器10をセットする(S10)。
【0035】
撮像器10をセットした後で、アーク放電評価装置1は、アーク電源110より金属ターゲット120と電極130との間にアーク電圧を印加して、金属ターゲット120と電極130との間にアーク放電を発生させ、金属ターゲット120の表面を昇華させる(S20)。
【0036】
アーク電圧を印加した後で、アーク放電評価装置1は、撮像器10により金属ターゲット(カソード)130の表面を所定のサンプリング周期で複数回撮影する(S30)。
アーク放電評価装置1は、ワークWへの硬質薄膜コーティングが終了するまで撮像器10による複数回(本実施形態では六回)の撮影を行い、複数の解析画像データ41を取得する。
【0037】
なお、ステップS30では、アーク放電状態がわかるデータを取得できればよく、例えば、金属ターゲット120の表面の温度を測定しても構わない。この場合、撮像器10は、サーモグラフィー等によって構成される。
【0038】
このように、ステップS30は、金属ターゲット130の表面を複数回撮影または金属ターゲット130の表面温度を複数回測定して、アーク放電状態を複数の解析画像データ41として取得する画像取得工程として機能する。
【0039】
図3に示すように、各解析画像データ41では、アークスポット100aに対応する部分に電流が集中して高温となり、最も強く光る。
【0040】
撮影が終了した後で、図1および図2に示すように、アーク放電評価装置1は、撮像器10からデータ解析部20に各解析画像データ41を送信し、データ解析部20に各解析画像データ41を記憶させる(S40)。
【0041】
各解析画像データ41を記憶した後で、データ解析部20は、各解析画像データ41を座標データに変換する変換工程を行う(S50)。
すなわち、データ解析部20は、画像取得工程S30にて撮影した各解析画像データ41の所定の位置を原点として、各解析画像データ41の一方向をx軸、前記一方向と直交する方向をy軸とした座標軸上に、各解析画像データ41を配置する。
【0042】
具体的には、データ解析部20は、図3に示す解析画像データ41の左下端部を原点として、紙面右方向をx軸、紙面上方向をy軸とした座標軸上に、解析画像データ41を配置する。
【0043】
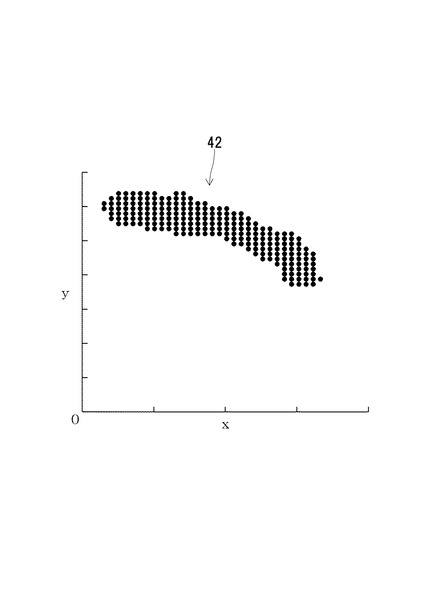
各解析画像データ41を座標データに変換した後で、図2および図4に示すように、データ解析部20は、座標データと所定の閾値とを比較することで、座標データよりアークスポット100aに対応する部分を、解析画像データ41毎に抽出する抽出工程を行う(S60)。
すなわち、データ解析部20は、各解析画像データ41の中で輝度が高いデータを、所定の閾値と比較することで座標データより抽出する。
【0044】
このとき、例えば、データ解析部20は、各解析画像データ41の中で最も輝度が高い(明るい)部分の輝度値の90%を閾値に設定し、前記閾値以上の輝度値を有するデータだけを座標データより抽出する。
これにより、データ解析部20は、アークスポット100aに対応する部分を所定の座標軸上に配置した座標群として、抽出座標データ42を取得する。
【0045】
なお、座標データの抽出に用いる閾値の設定内容は、本実施形態に限定されるものでない。また、サーモグラフィーによって撮像器10を構成した場合、アーク放電状態を測定した温度に対して閾値が設定される。
【0046】
座標データを抽出した後で、データ解析部20は、解析画像データ41毎に抽出座標データ42の数を算出する(S70)。
【0047】
抽出座標データ42の数を算出した後で、データ解析部20は、解析画像データ41毎に抽出座標データ42よりアーク放電状態の特徴量を算出する特徴量取得工程を行う(S80)。
【0048】
「アーク放電状態の特徴量」とは、アーク放電状態を定量的に示す情報である。
【0049】
アーク放電状態の特徴量を算出するとき、図5に示すように、データ解析部20は、抽出座標データ42を二次関数で回帰する。
データ解析部20は、例えば、抽出座標データ42の縦軸を従属変数y、抽出座標データ42の横軸を独立変数xとして、二次関数y=ax2+bx+cの式を取得する。このとき、データ解析部20は、二次関数の関連度合いを示す相関係数rを算出する。データ解析部20は、解析画像データ41毎に二次関数および二次関数の相関係数を算出する。
【0050】
データ解析部20は、特徴量取得工程S80にて、二次関数の二次項aと二次関数の相関係数rとをアーク放電状態の特徴量として取得する。
【0051】
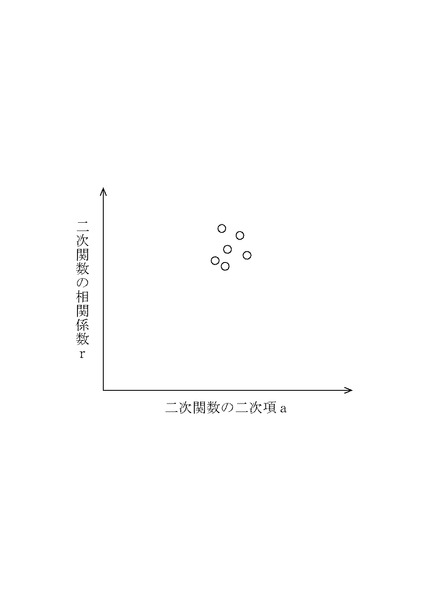
これによれば、図6に示すように、データ解析部20は、二次関数の二次項aおよび二次関数の相関係数rの関係を用いて、アーク放電状態(アークスポット100aの動き)を定量的に表すことができる。
本実施形態では、撮像器10により六回撮影を行うため、六枚の解析画像データ41に対応する六つの座標データ(図6に白抜きの丸で示す座標データ)が、二次関数の二次項aを横軸、二次関数の相関係数rを縦軸とした座標軸上に配置される。
このような二次関数の二次項aおよび二次関数の相関係数rは、アークスポット100aの移動軌跡が閉じた形状とならない場合でも算出可能である。
【0052】
従って、アーク放電評価方法は、アークスポット100aの移動軌跡が閉じた形状とならない場合でもアーク放電状態を定量化できるため、アーク放電状態を確実に評価できる。
【0053】
二次関数の二次項aと二次関数の相関係数rとを取得した後で、図7に示すように、データ解析部20は、原点から各抽出座標データ42までの距離Rnを算出する。このとき、データ解析部20は、抽出座標データ42の座標値毎に距離Rnを算出するとともに、ステップS70にて算出した座標データの数を用いて距離Rnの平均Rを算出する(図7に示す距離の平均を示す式参照)。
【0054】
なお、反転信号は、本来、オーバーラインを用いて表記すべきであるが、明細書作成方式の制限上、本明細書では「平均R」と表記する。
【0055】
距離Rnの平均Rを算出した後で、データ解析部20は、距離Rnの平均Rおよび抽出座標データ42より、距離Rnの分散VRを算出する(図7に示す距離の分散を示す式参照)。
すなわち、データ解析部20は、座標データの原点に対する距離Rnの統計量を算出する。データ解析部20は、解析画像データ41毎に前記統計量を算出する。
【0056】
データ解析部20は、特徴量取得工程S80にて、距離Rnの平均Rと距離Rnの分散VRとをアーク放電状態の特徴量として取得する。
【0057】
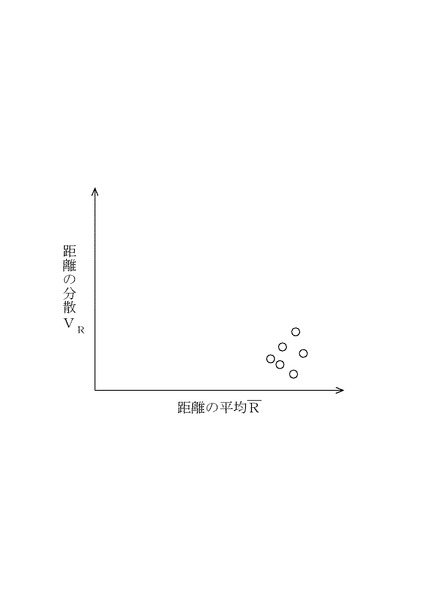
これによれば、データ解析部20は、図8に示すように、データ解析部20は、距離Rnの平均Rおよび距離Rnの分散VRの関係を用いて、アーク放電状態を定量的に表すことができる。
本実施形態では、撮像器10により六回撮影を行うため、六枚の解析画像データ41に対応する六つの座標データ(図8に白抜きの丸で示す座標データ)が、距離Rnの平均Rを横軸、距離Rnの分散VRを縦軸とした座標軸上に配置される。
このような距離Rnの平均Rおよび距離Rnの分散VRは、アークスポット100aの移動軌跡が閉じた形状とならない場合でも算出可能である。
【0058】
従って、アーク放電評価方法は、アークスポット100aの移動軌跡が閉じた形状とならない場合でもアーク放電状態を定量化できるため、アーク放電状態を確実に評価できる。
【0059】
本実施形態のデータ解析部20は、特徴量取得工程S80にて、二次関数の二次項aと二次関数の相関係数rと距離Rnの平均Rと距離Rnの分散VRとをアーク放電状態の特徴量として取得する。
【0060】
これによれば、データ解析部20は、図6および図8に示すように、二次関数の二次項aおよび二次関数の相関係数rの関係と、距離Rnの平均Rおよび距離Rnの分散VRの関係とを用いて、アーク放電状態を定量的に表すことができる。
【0061】
従って、アーク放電評価方法は、アークスポット100aの移動軌跡が閉じた形状とならない場合でもアーク放電状態を定量化できるため、アーク放電状態を確実に評価できる。
また、アーク放電評価方法は、二次関数の二次項aおよび二次関数の相関係数rの関係と、距離Rnの平均Rおよび距離Rnの分散VRの関係とのいずれか一方を用いてアーク放電状態を評価する場合よりも、より高精度にアーク放電状態を評価できる。
【0062】
データ解析部20は、以上のようなステップS40〜S80を、演算部21によって行う。つまり、演算部21は、ステップS40〜S80を実行するための演算処理を行うプログラム等により構成される。
【0063】
なお、アーク放電評価方法において取得するアーク放電状態の特徴量は、二次関数の二次項aおよび二次関数の相関係数rと、距離Rnの平均Rおよび距離Rnの分散VRとの、少なくともいずれか一方であればよい。
【0064】
このようなアーク放電評価方法を適用した生産設備においては、成膜品質を監視できる。
以下では、アーク放電評価装置1を生産設備に設置して、成膜品質を監視するものとして説明を行う。
【0065】
図9に示すように、成膜品質の監視を行う場合、アーク放電評価装置1は、図1に示す構成に加えて、データ解析部20に判定部22を備えるとともに、表示部30をさらに具備する。
【0066】
判定部22は、アーク放電状態の特徴量から成膜品質を良否判定し、その結果を表示部30に送信する。
【0067】
表示部30は、判定部22からの信号を受信して、作業者等がその結果を判断可能となるように表示する。
【0068】
表示部30は、データ解析部20を動作させるパーソナルコンピュータに市販の液晶ディスプレイやプリンタ等を接続することにより動作する。
【0069】
次に、成膜品質を監視する場合の手順について説明する。
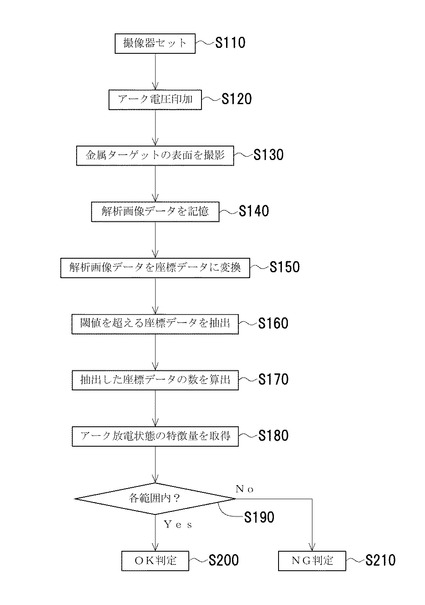
図10に示すように、アーク放電評価装置1は、前述したステップS10〜S80と同様のステップS110〜S180を行い、アーク放電状態の特徴量を取得する。
【0070】
アーク放電状態の特徴量を取得した後で、データ解析部20は、アーク放電状態の特徴量の関係を求める。すなわち、データ解析部20は、二次関数の二次項aおよび二次関数の相関係数rの関係を求めるとともに、距離Rnの平均Rおよび距離Rnの分散VRの関係を求める。
そして、データ解析部20は、それぞれのアーク放電状態の特徴量に設定される各範囲R1・R2と求めたアーク放電状態の特徴量の関係との比較を行う(S190)。
【0071】
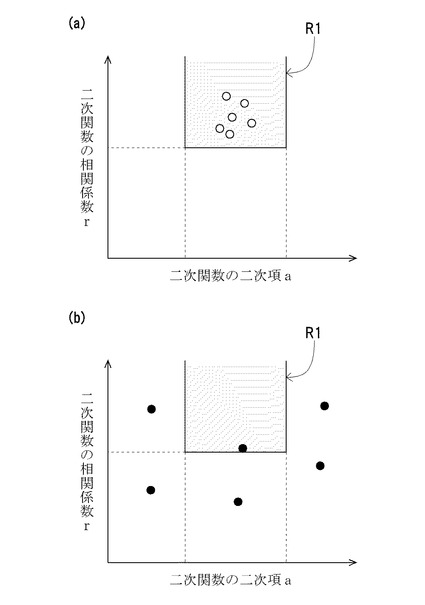
具体的には、図11に示すように、データ解析部20は、二次関数の二次項aと二次関数の相関係数rとにより規定される座標データが、第一範囲R1内に位置しているかを確認する(図11に白塗りおよび黒塗りの丸で示す座標データ参照)。
【0072】
図11(a)に示すように、第一範囲R1は、成膜品質が良好であると判定される場合のアーク放電状態を撮影し、その解析画像データ41の二次関数の二次項aと二次関数の相関係数rとにより規定される座標データが含まれる範囲である(図11(a)に白塗りの丸で示す座標データ参照)。
また、図11(b)に示すように、成膜品質が良好でないと判定される場合のアーク放電状態を撮影した解析画像データ41の、二次関数の二次項aと二次関数の相関係数rとにより規定される座標データは、少なくとも一つ以上第一範囲R1外に位置する(図11(b)に黒塗りの丸で示す座標データ参照)。
【0073】
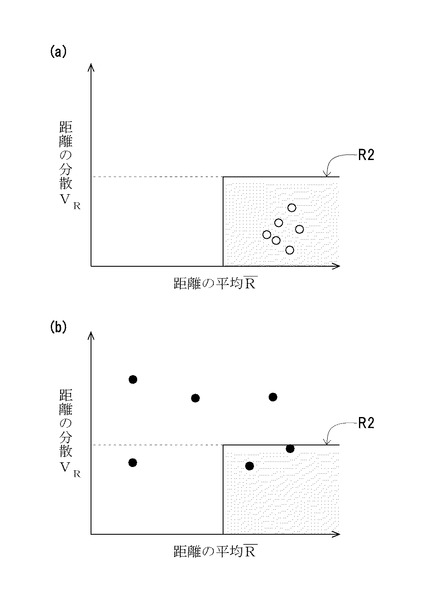
図12に示すように、データ解析部20は、距離Rnの平均Rと距離Rnの分散VRとにより規定される座標データが、第二範囲R2内に位置しているかを確認する(図12に白塗りおよび黒塗りの丸で示す座標データ参照)。
【0074】
図12(a)に示すように、第二範囲R2は、成膜品質が良好であると判定される場合のアーク放電状態を撮影し、その解析画像データ41の距離Rnの平均Rと距離Rnの分散VRとにより規定される座標データが含まれる範囲である(図12(a)に白塗りの丸で示す座標データ参照)。
また、図12(b)に示すように、成膜品質が良好でないと判定される場合のアーク放電状態を撮影し、その解析画像データ41の距離Rnの平均Rおよび距離Rnの分散VRに対応するデータは、少なくとも一つ以上第二範囲R2外に位置する(図12(b)に黒塗りの丸で示す座標データ参照)。
【0075】
データ解析部20は、各範囲R1・R2内に全ての座標データが含まれているかどうかを確認することで、成膜品質の良否判断を行う。
【0076】
仮に、図11(a)および図12(a)に示すように、各範囲R1・R2内に全ての座標データが含まれている場合、データ解析部20は、成膜品質が良好であると判断し、表示部30に成膜品質が良好であることを表示させる(S190:Yes、S200)。
つまり、データ解析部20は、アーク放電状態が良好であると判断する。
【0077】
一方、図11(b)および図12(b)に示すように、第一範囲R1内および第二範囲R2内の少なくともいずれか一方に全ての座標データが含まれていない場合、データ解析部20は、成膜品質が良好でないと判断し、表示部30に成膜品質が良好でないことを表示させる(S190:No、S210)。
つまり、データ解析部20は、アーク放電状態が良好でないと判断する。
【0078】
これによれば、アーク放電評価装置1は、アーク放電状態の特徴量の関係(二次関数の二次項aおよび二次関数の相関係数rの関係、距離Rnの平均Rおよび距離Rnの分散VRの関係)に基づいて、成膜品質の良否判定を行うことができる。
従って、アーク放電評価方法を適用した生産設備では、成膜品質を監視できる。
【0079】
データ解析部20は、以上のようなステップS190〜S210を、判定部22によって行う。つまり、判定部22は、ステップS190〜S210を実行するための演算処理を行うプログラム等により構成される。
【0080】
このように、ステップS190は、ステップS180で取得した二次関数の二次項aおよび二次関数の相関係数rの関係と、距離Rnの平均Rおよび距離Rnの分散VRの関係とに基づいて、アーク放電状態を良否判定する良否判定工程として機能する。
【0081】
本実施形態では、二次関数の二次項aおよび二次関数の相関関数rの関係と、距離Rnの平均Rおよび距離Rnの分散VRの関係とに基づいて良否判定を行ったが、これに限定されるものでない。
すなわち、アーク放電評価方法は、二次関数の二次項aおよび二次関数の相関関数rの関係に基づいて良否判定を行っても構わない。
【0082】
また、アーク放電評価方法は、距離Rnの平均Rおよび距離Rnの分散VRの関係に基づいて良否判定を行っても構わない。
【0083】
以下では、各範囲R1・R2を決定する手順について説明する。
【0084】
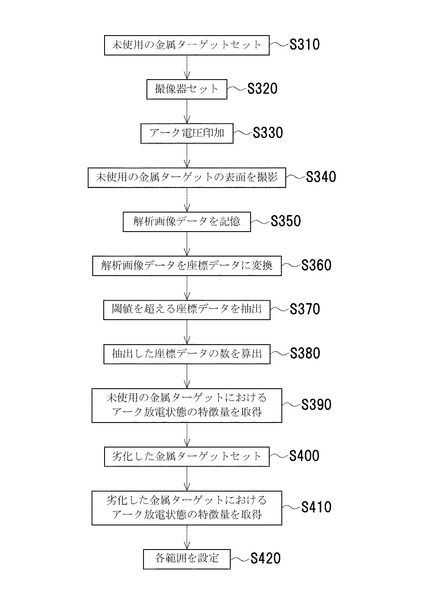
図13に示すように、各範囲R1・R2の設定では、未使用の金属ターゲット120を真空容器101内にセットする(S310)。
そして、アーク放電評価装置1は、撮像器10をセットして、未使用の金属ターゲット120と電極130との間にアーク電圧を印加して、未使用の金属ターゲット120の表面を昇華させる(S320、S330)。
【0085】
未使用の金属ターゲット120の表面を昇華させた後、アーク放電評価装置1は、図13および図14に示すように、前述したステップS30〜S80と同様のステップS340〜S390を行う。つまり、アーク放電評価装置1は、未使用の金属ターゲット120におけるアーク放電状態の特徴量を取得する(図14に白塗りの丸で示す座標データ参照)。
【0086】
未使用の金属ターゲット120におけるアーク放電状態の特徴量を取得した後で、図13に示すように、アーク放電評価装置1は、劣化した金属ターゲット120を真空容器101にセットする(S400)。つまり、アーク放電評価装置1は、未使用の金属ターゲット120を劣化した金属ターゲット120に交換する。
【0087】
「劣化した金属ターゲット120」とは、成膜品質が良好でないと判定されたときに表面を昇華させた金属ターゲット120である。このような劣化した金属ターゲット120としては、例えば、硬質薄膜コーティングを繰り返し行うことで表面が窪んだ金属ターゲット120等がある。
【0088】
劣化した金属ターゲット120をセットした後で、データ解析部20は、劣化した金属ターゲット120と電極130との間にアーク電圧を印加する。すなわち、図13および図14に示すように、データ解析部20は、前述したステップS30〜S80と同様の手順で、劣化した金属ターゲット120におけるアーク放電状態の特徴量を取得する(S410、図14に黒塗りの丸で示す座標データ参照)。
【0089】
劣化した金属ターゲット120におけるアーク放電状態の特徴量を取得した後で、データ解析部20は、未使用の金属ターゲット120と劣化した金属ターゲット120とにおけるアーク放電状態の特徴量とを比較して、各範囲R1・R2を設定する(S420)。
【0090】
劣化した金属ターゲット120におけるアーク放電状態の特徴量(図14に黒塗りの丸で示す座標データ)は、未使用の金属ターゲット120におけるアーク放電状態の特徴量(図14に白塗りの丸で示す座標データ)の周囲に分散する。
このため、データ解析部20は、例えば、未使用の金属ターゲット120におけるアーク放電状態の特徴量が集中している部分の周囲を囲む範囲等を、各範囲R1・R2として設定する。
【符号の説明】
【0091】
1 アーク放電評価装置
41 解析画像データ
42 抽出座標データ(抽出した座標データ)
100a アークスポット
120 金属ターゲット(カソード)
130 電極(アノード)
a 二次項(特徴量)
r 相関係数(特徴量)
R 距離の平均(特徴量)
VR 距離の分散(特徴量)
【技術分野】
【0001】
本発明は、カソードとアノードとの間に発生させるアーク放電の状態を評価するアーク放電評価方法に関する。
【背景技術】
【0002】
従来から、自動車部品の摺動性や耐摩耗性等を向上させるために、真空アーク蒸着装置によって自動車部品に硬質薄膜コーティング(例えば、DLC(Diamond Like Carbon)コーティング等)を施している。
真空アーク蒸着装置は、真空容器内に配置される金属ターゲット(カソード)と金属ターゲットより離間して配置される電極(アノード)との間でアーク放電を発生させ、金属ターゲットの表面を昇華させて金属イオンを発生させる。そして、真空アーク蒸着装置は、金属イオンをワークの表面に堆積させることで、ワークに硬質薄膜コーティングを施す。
【0003】
生産設備に複数の真空アーク蒸着装置を設置して、製品の成膜品質を同質にする場合、制御因子を測定して、制御因子と成膜品質との関係を明確にする必要がある。
このような制御因子の一つとして、アーク放電状態、つまり、アークスポット(陰極点)の動きが考えられる。アークスポットは、金属ターゲットの表面で高温状態となる部分であり、多くの金属イオンが発生する。
すなわち、制御因子と成膜品質との関係を明確にするためには、アーク放電状態を定量的に評価する必要がある。
【0004】
特許文献1に開示される技術では、CCDカメラ等によりアークやアーク周囲を撮影し、撮影した画像より略楕円状の高輝度部(アーク)を抽出する。そして、高輝度部の重心、長軸、および短軸等に基づいて、溶接トーチのウィービング動作の補正量を定量的に評価する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−42067号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示される技術では、高輝度部の重心等を算出するため、高輝度部が閉じた形状であることが前提となっている。アークスポットは、その形状が非常に小さく、また、金属ターゲットの表面をランダムに高速移動するため、アークスポットの移動軌跡を繋いで高輝度部を抽出する場合、高輝度部が閉じた形状とならない可能性がある。
従って、高輝度部を抽出しても、アークスポットを適切に抽出できない可能性がある。つまり、特許文献1に開示される技術では、アーク放電状態を確実に評価できない可能性がある。
【0007】
本発明は、以上の如き状況を鑑みてなされたものであり、アーク放電状態を確実に評価できるアーク放電評価方法を提供するものである。
【課題を解決するための手段】
【0008】
請求項1においては、カソードの表面を複数回撮影または前記カソードの表面温度を複数回測定して、前記カソードとアノードとの間に発生させるアーク放電の状態を、複数の解析画像データとして取得する画像取得工程と、前記画像取得工程にて撮影した解析画像データの所定の位置を原点として、前記各解析画像データを座標データに変換する変換工程と、前記座標データと所定の閾値とを比較することで、前記座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程と、前記抽出した座標データを二次関数で回帰して、前記二次関数の二次項と前記二次関数の相関係数とを前記アーク放電状態の特徴量として取得する特徴量取得工程と、を行う、ものである。
【0009】
請求項2においては、前記二次関数の二次項および前記二次関数の相関係数の関係に基づいて、前記アーク放電状態を良否判定する良否判定工程、をさらに行う、ものである。
【0010】
請求項3においては、カソードの表面を複数回撮影または前記カソードの表面温度を複数回測定して、前記カソードとアノードとの間に発生させるアーク放電の状態を、複数の解析画像データとして取得する画像取得工程と、前記画像取得工程にて撮影した解析画像データの所定の位置を原点として、前記解析画像データを座標データに変換する変換工程と、前記座標データと所定の閾値とを比較することで、前記座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程と、前記座標データの原点から前記抽出した座標データまで距離の平均と前記距離の分散とを算出し、前記距離の平均と前記距離の分散とを前記アーク放電状態の特徴量として取得する特徴量取得工程と、を行う、ものである。
【0011】
請求項4においては、前記距離の平均および前記距離の分散の関係に基づいて、前記アーク放電状態を良否判定する良否判定工程、をさらに行う、ものである。
【0012】
請求項5においては、カソードの表面を複数回撮影または前記カソードの表面温度を複数回測定して、前記カソードとアノードとの間に発生させるアーク放電の状態を、複数の解析画像データとして取得する画像取得工程と、前記画像取得工程にて撮影した解析画像データの所定の位置を原点として、前記解析画像データを座標データに変換する変換工程と、前記座標データと所定の閾値とを比較することで、前記座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程と、前記抽出した座標データを二次関数で回帰するとともに、前記座標データの原点から前記抽出した座標データまで距離の平均と前記距離の分散とを算出し、前記二次関数の二次項と前記二次関数の相関係数と前記距離の平均と前記距離の分散とを前記アーク放電状態の特徴量として取得する特徴量取得工程と、を行う、ものである。
【0013】
請求項6においては、前記二次関数の二次項および前記二次関数の相関係数の関係と、前記距離の平均および前記距離の分散の関係とに基づいて、前記アーク放電状態を良否判定する良否判定工程、をさらに行う、ものである。
【発明の効果】
【0014】
本発明は、アークスポットの移動軌跡が閉じた形状とならない場合でもアーク放電状態を定量化できるため、アーク放電状態を確実に評価できる、という効果を奏する。
【図面の簡単な説明】
【0015】
【図1】アーク放電評価装置の構成を示す図。
【図2】アーク放電評価方法の手順を示す図。
【図3】解析画像データを示す図。
【図4】抽出座標データを示す図。
【図5】回帰した二次関数のグラフを示す図。
【図6】二次関数の二次項および二次関数の相関係数の関係を示す図。
【図7】原点から各抽出座標データまでの距離を示す図。
【図8】距離の平均および距離の分散の関係を示す図。
【図9】生産設備にアーク放電評価装置を適用した状態を示す図。
【図10】アーク放電評価方法を用いて成膜品質を良否判定する手順を示す図。
【図11】二次関数の二次項および二次関数の相関係数の関係から成膜品質を良否判定する状態を示す図。(a)成膜品質が良好であると判定される場合を示す図。(a)成膜品質が良好でないと判定される場合を示す図。
【図12】距離の平均および距離の分散の関係から成膜品質を良否判定する状態を示す図。(a)成膜品質が良好であると判定される場合を示す図。(a)成膜品質が良好でないと判定される場合を示す図。
【図13】各範囲を設定する手順を示す図。
【図14】未使用の金属ターゲットおよび劣化した金属ターゲットにおけるアーク放電状態の特徴量を示す図。(a)二次関数の二次項および二次関数の相関係数の関係を示す図。(b)距離の平均および距離の分散の関係を示す図。
【発明を実施するための形態】
【0016】
以下では、本実施形態のアーク放電評価方法について説明する。
【0017】
本実施形態のアーク放電評価方法は、真空アーク蒸着装置100によってワークWに硬質薄膜コーティング(例えば、DLC(Diamond Like Carbon)コーティング等)を施すときに発生させるアーク放電の状態を評価するものである。
図1に示すように、本実施形態のアーク放電評価方法によるアーク放電評価は、真空アーク蒸着装置100にアーク放電評価装置1を取り付けることによって実施される。
【0018】
まず、真空アーク蒸着装置100について説明する。
真空アーク蒸着装置100は、アーク電源110、金属ターゲット120、および二つの電極130等を具備する。
【0019】
アーク電源110は、陰極側が金属ターゲット120に接続されるとともに陽極側が電極130に接続され、金属ターゲット120と電極130との間にアーク電圧を印加する。
【0020】
金属ターゲット120は、真空容器101内に配置され、アーク電源110よりアーク電圧が印加されてカソード(陰極)となる。金属ターゲット120は、硬質薄膜となる材料(チタン等)によって構成される。
【0021】
電極130は、真空容器101内に配置されるとともに、金属ターゲット120より離間する位置に配置される。電極130は、アーク電源110よりアーク電圧が印加されてアノード(陽極)となる。
【0022】
真空容器101内の金属ターゲット120および電極130より離間する位置には、ワークWが配置される。
【0023】
真空アーク蒸着装置100は、真空ポンプ等により真空容器101内を所定の真空度にして、アーク電源110により金属ターゲット120と電極130との間にアーク電圧を印加する。
そして、真空アーク蒸着装置100は、金属ターゲット120と電極130との間でアーク放電を発生させ、金属ターゲット120の表面を昇華させて金属イオン121を発生させる。そして、真空アーク蒸着装置100は、当該金属イオン121をワークWの表面に堆積させて硬質薄膜を成形する。
【0024】
生産設備に複数の真空アーク蒸着装置100を設置して、各真空アーク蒸着装置100間で製品の成膜品質を同質にする場合、制御因子を測定して、制御因子と成膜品質との関係を明確にする必要がある。
このような制御因子の一つとして、アーク放電状態、つまり、アークスポット100a(陰極点、図3参照)の動きが考えられる。
【0025】
アークスポット100aは、金属ターゲット120の表面で高温状態となる部分である。従って、アークスポット100aが発生している部分では、多くの金属イオン121が発生する。アークスポット100aは、その形状が非常に小さく、金属ターゲット120の表面をランダムに高速移動する。
【0026】
すなわち、制御因子と成膜品質との関係を明確にするためには、アーク放電状態を定量的に評価する必要がある。
アーク放電評価方法は、このようなアーク放電状態を評価するものである。
【0027】
次に、アーク放電評価装置1について説明する。
アーク放電評価装置1は、撮像器10およびデータ解析部20等を具備する。
【0028】
撮像器10は、真空容器101の外側に配置され、真空容器101内を視認可能なのぞき窓101aより金属ターゲット120の表面を撮影する。本実施形態の撮像器10は、CCDカメラによって構成される。撮像器10により撮影された解析画像データ41(図3参照)は、データ解析部20に送信される。
【0029】
なお、撮像器10の構成は、本実施形態に限定されるものでなく、例えば、赤外線カメラであっても構わない。
【0030】
データ解析部20は、解析画像データ41を記録するとともに解析画像データ41を解析し、アーク放電状態を評価するものである。データ解析部20は、演算部21等を備える。
【0031】
演算部21は、アーク放電評価方法に関する種々の演算処理を行う。
【0032】
データ解析部20は、例えば、市販のパーソナルコンピュータで所定のプログラムを実行することにより動作する。
【0033】
次に、アーク放電評価装置1を用いて行うアーク放電評価方法の手順について説明する。
【0034】
まず、図1および図2に示すように、アーク放電評価方法では、真空容器101ののぞき窓101aより金属ターゲット120の表面を撮影可能となるように、真空容器101の外側に撮像器10をセットする(S10)。
【0035】
撮像器10をセットした後で、アーク放電評価装置1は、アーク電源110より金属ターゲット120と電極130との間にアーク電圧を印加して、金属ターゲット120と電極130との間にアーク放電を発生させ、金属ターゲット120の表面を昇華させる(S20)。
【0036】
アーク電圧を印加した後で、アーク放電評価装置1は、撮像器10により金属ターゲット(カソード)130の表面を所定のサンプリング周期で複数回撮影する(S30)。
アーク放電評価装置1は、ワークWへの硬質薄膜コーティングが終了するまで撮像器10による複数回(本実施形態では六回)の撮影を行い、複数の解析画像データ41を取得する。
【0037】
なお、ステップS30では、アーク放電状態がわかるデータを取得できればよく、例えば、金属ターゲット120の表面の温度を測定しても構わない。この場合、撮像器10は、サーモグラフィー等によって構成される。
【0038】
このように、ステップS30は、金属ターゲット130の表面を複数回撮影または金属ターゲット130の表面温度を複数回測定して、アーク放電状態を複数の解析画像データ41として取得する画像取得工程として機能する。
【0039】
図3に示すように、各解析画像データ41では、アークスポット100aに対応する部分に電流が集中して高温となり、最も強く光る。
【0040】
撮影が終了した後で、図1および図2に示すように、アーク放電評価装置1は、撮像器10からデータ解析部20に各解析画像データ41を送信し、データ解析部20に各解析画像データ41を記憶させる(S40)。
【0041】
各解析画像データ41を記憶した後で、データ解析部20は、各解析画像データ41を座標データに変換する変換工程を行う(S50)。
すなわち、データ解析部20は、画像取得工程S30にて撮影した各解析画像データ41の所定の位置を原点として、各解析画像データ41の一方向をx軸、前記一方向と直交する方向をy軸とした座標軸上に、各解析画像データ41を配置する。
【0042】
具体的には、データ解析部20は、図3に示す解析画像データ41の左下端部を原点として、紙面右方向をx軸、紙面上方向をy軸とした座標軸上に、解析画像データ41を配置する。
【0043】
各解析画像データ41を座標データに変換した後で、図2および図4に示すように、データ解析部20は、座標データと所定の閾値とを比較することで、座標データよりアークスポット100aに対応する部分を、解析画像データ41毎に抽出する抽出工程を行う(S60)。
すなわち、データ解析部20は、各解析画像データ41の中で輝度が高いデータを、所定の閾値と比較することで座標データより抽出する。
【0044】
このとき、例えば、データ解析部20は、各解析画像データ41の中で最も輝度が高い(明るい)部分の輝度値の90%を閾値に設定し、前記閾値以上の輝度値を有するデータだけを座標データより抽出する。
これにより、データ解析部20は、アークスポット100aに対応する部分を所定の座標軸上に配置した座標群として、抽出座標データ42を取得する。
【0045】
なお、座標データの抽出に用いる閾値の設定内容は、本実施形態に限定されるものでない。また、サーモグラフィーによって撮像器10を構成した場合、アーク放電状態を測定した温度に対して閾値が設定される。
【0046】
座標データを抽出した後で、データ解析部20は、解析画像データ41毎に抽出座標データ42の数を算出する(S70)。
【0047】
抽出座標データ42の数を算出した後で、データ解析部20は、解析画像データ41毎に抽出座標データ42よりアーク放電状態の特徴量を算出する特徴量取得工程を行う(S80)。
【0048】
「アーク放電状態の特徴量」とは、アーク放電状態を定量的に示す情報である。
【0049】
アーク放電状態の特徴量を算出するとき、図5に示すように、データ解析部20は、抽出座標データ42を二次関数で回帰する。
データ解析部20は、例えば、抽出座標データ42の縦軸を従属変数y、抽出座標データ42の横軸を独立変数xとして、二次関数y=ax2+bx+cの式を取得する。このとき、データ解析部20は、二次関数の関連度合いを示す相関係数rを算出する。データ解析部20は、解析画像データ41毎に二次関数および二次関数の相関係数を算出する。
【0050】
データ解析部20は、特徴量取得工程S80にて、二次関数の二次項aと二次関数の相関係数rとをアーク放電状態の特徴量として取得する。
【0051】
これによれば、図6に示すように、データ解析部20は、二次関数の二次項aおよび二次関数の相関係数rの関係を用いて、アーク放電状態(アークスポット100aの動き)を定量的に表すことができる。
本実施形態では、撮像器10により六回撮影を行うため、六枚の解析画像データ41に対応する六つの座標データ(図6に白抜きの丸で示す座標データ)が、二次関数の二次項aを横軸、二次関数の相関係数rを縦軸とした座標軸上に配置される。
このような二次関数の二次項aおよび二次関数の相関係数rは、アークスポット100aの移動軌跡が閉じた形状とならない場合でも算出可能である。
【0052】
従って、アーク放電評価方法は、アークスポット100aの移動軌跡が閉じた形状とならない場合でもアーク放電状態を定量化できるため、アーク放電状態を確実に評価できる。
【0053】
二次関数の二次項aと二次関数の相関係数rとを取得した後で、図7に示すように、データ解析部20は、原点から各抽出座標データ42までの距離Rnを算出する。このとき、データ解析部20は、抽出座標データ42の座標値毎に距離Rnを算出するとともに、ステップS70にて算出した座標データの数を用いて距離Rnの平均Rを算出する(図7に示す距離の平均を示す式参照)。
【0054】
なお、反転信号は、本来、オーバーラインを用いて表記すべきであるが、明細書作成方式の制限上、本明細書では「平均R」と表記する。
【0055】
距離Rnの平均Rを算出した後で、データ解析部20は、距離Rnの平均Rおよび抽出座標データ42より、距離Rnの分散VRを算出する(図7に示す距離の分散を示す式参照)。
すなわち、データ解析部20は、座標データの原点に対する距離Rnの統計量を算出する。データ解析部20は、解析画像データ41毎に前記統計量を算出する。
【0056】
データ解析部20は、特徴量取得工程S80にて、距離Rnの平均Rと距離Rnの分散VRとをアーク放電状態の特徴量として取得する。
【0057】
これによれば、データ解析部20は、図8に示すように、データ解析部20は、距離Rnの平均Rおよび距離Rnの分散VRの関係を用いて、アーク放電状態を定量的に表すことができる。
本実施形態では、撮像器10により六回撮影を行うため、六枚の解析画像データ41に対応する六つの座標データ(図8に白抜きの丸で示す座標データ)が、距離Rnの平均Rを横軸、距離Rnの分散VRを縦軸とした座標軸上に配置される。
このような距離Rnの平均Rおよび距離Rnの分散VRは、アークスポット100aの移動軌跡が閉じた形状とならない場合でも算出可能である。
【0058】
従って、アーク放電評価方法は、アークスポット100aの移動軌跡が閉じた形状とならない場合でもアーク放電状態を定量化できるため、アーク放電状態を確実に評価できる。
【0059】
本実施形態のデータ解析部20は、特徴量取得工程S80にて、二次関数の二次項aと二次関数の相関係数rと距離Rnの平均Rと距離Rnの分散VRとをアーク放電状態の特徴量として取得する。
【0060】
これによれば、データ解析部20は、図6および図8に示すように、二次関数の二次項aおよび二次関数の相関係数rの関係と、距離Rnの平均Rおよび距離Rnの分散VRの関係とを用いて、アーク放電状態を定量的に表すことができる。
【0061】
従って、アーク放電評価方法は、アークスポット100aの移動軌跡が閉じた形状とならない場合でもアーク放電状態を定量化できるため、アーク放電状態を確実に評価できる。
また、アーク放電評価方法は、二次関数の二次項aおよび二次関数の相関係数rの関係と、距離Rnの平均Rおよび距離Rnの分散VRの関係とのいずれか一方を用いてアーク放電状態を評価する場合よりも、より高精度にアーク放電状態を評価できる。
【0062】
データ解析部20は、以上のようなステップS40〜S80を、演算部21によって行う。つまり、演算部21は、ステップS40〜S80を実行するための演算処理を行うプログラム等により構成される。
【0063】
なお、アーク放電評価方法において取得するアーク放電状態の特徴量は、二次関数の二次項aおよび二次関数の相関係数rと、距離Rnの平均Rおよび距離Rnの分散VRとの、少なくともいずれか一方であればよい。
【0064】
このようなアーク放電評価方法を適用した生産設備においては、成膜品質を監視できる。
以下では、アーク放電評価装置1を生産設備に設置して、成膜品質を監視するものとして説明を行う。
【0065】
図9に示すように、成膜品質の監視を行う場合、アーク放電評価装置1は、図1に示す構成に加えて、データ解析部20に判定部22を備えるとともに、表示部30をさらに具備する。
【0066】
判定部22は、アーク放電状態の特徴量から成膜品質を良否判定し、その結果を表示部30に送信する。
【0067】
表示部30は、判定部22からの信号を受信して、作業者等がその結果を判断可能となるように表示する。
【0068】
表示部30は、データ解析部20を動作させるパーソナルコンピュータに市販の液晶ディスプレイやプリンタ等を接続することにより動作する。
【0069】
次に、成膜品質を監視する場合の手順について説明する。
図10に示すように、アーク放電評価装置1は、前述したステップS10〜S80と同様のステップS110〜S180を行い、アーク放電状態の特徴量を取得する。
【0070】
アーク放電状態の特徴量を取得した後で、データ解析部20は、アーク放電状態の特徴量の関係を求める。すなわち、データ解析部20は、二次関数の二次項aおよび二次関数の相関係数rの関係を求めるとともに、距離Rnの平均Rおよび距離Rnの分散VRの関係を求める。
そして、データ解析部20は、それぞれのアーク放電状態の特徴量に設定される各範囲R1・R2と求めたアーク放電状態の特徴量の関係との比較を行う(S190)。
【0071】
具体的には、図11に示すように、データ解析部20は、二次関数の二次項aと二次関数の相関係数rとにより規定される座標データが、第一範囲R1内に位置しているかを確認する(図11に白塗りおよび黒塗りの丸で示す座標データ参照)。
【0072】
図11(a)に示すように、第一範囲R1は、成膜品質が良好であると判定される場合のアーク放電状態を撮影し、その解析画像データ41の二次関数の二次項aと二次関数の相関係数rとにより規定される座標データが含まれる範囲である(図11(a)に白塗りの丸で示す座標データ参照)。
また、図11(b)に示すように、成膜品質が良好でないと判定される場合のアーク放電状態を撮影した解析画像データ41の、二次関数の二次項aと二次関数の相関係数rとにより規定される座標データは、少なくとも一つ以上第一範囲R1外に位置する(図11(b)に黒塗りの丸で示す座標データ参照)。
【0073】
図12に示すように、データ解析部20は、距離Rnの平均Rと距離Rnの分散VRとにより規定される座標データが、第二範囲R2内に位置しているかを確認する(図12に白塗りおよび黒塗りの丸で示す座標データ参照)。
【0074】
図12(a)に示すように、第二範囲R2は、成膜品質が良好であると判定される場合のアーク放電状態を撮影し、その解析画像データ41の距離Rnの平均Rと距離Rnの分散VRとにより規定される座標データが含まれる範囲である(図12(a)に白塗りの丸で示す座標データ参照)。
また、図12(b)に示すように、成膜品質が良好でないと判定される場合のアーク放電状態を撮影し、その解析画像データ41の距離Rnの平均Rおよび距離Rnの分散VRに対応するデータは、少なくとも一つ以上第二範囲R2外に位置する(図12(b)に黒塗りの丸で示す座標データ参照)。
【0075】
データ解析部20は、各範囲R1・R2内に全ての座標データが含まれているかどうかを確認することで、成膜品質の良否判断を行う。
【0076】
仮に、図11(a)および図12(a)に示すように、各範囲R1・R2内に全ての座標データが含まれている場合、データ解析部20は、成膜品質が良好であると判断し、表示部30に成膜品質が良好であることを表示させる(S190:Yes、S200)。
つまり、データ解析部20は、アーク放電状態が良好であると判断する。
【0077】
一方、図11(b)および図12(b)に示すように、第一範囲R1内および第二範囲R2内の少なくともいずれか一方に全ての座標データが含まれていない場合、データ解析部20は、成膜品質が良好でないと判断し、表示部30に成膜品質が良好でないことを表示させる(S190:No、S210)。
つまり、データ解析部20は、アーク放電状態が良好でないと判断する。
【0078】
これによれば、アーク放電評価装置1は、アーク放電状態の特徴量の関係(二次関数の二次項aおよび二次関数の相関係数rの関係、距離Rnの平均Rおよび距離Rnの分散VRの関係)に基づいて、成膜品質の良否判定を行うことができる。
従って、アーク放電評価方法を適用した生産設備では、成膜品質を監視できる。
【0079】
データ解析部20は、以上のようなステップS190〜S210を、判定部22によって行う。つまり、判定部22は、ステップS190〜S210を実行するための演算処理を行うプログラム等により構成される。
【0080】
このように、ステップS190は、ステップS180で取得した二次関数の二次項aおよび二次関数の相関係数rの関係と、距離Rnの平均Rおよび距離Rnの分散VRの関係とに基づいて、アーク放電状態を良否判定する良否判定工程として機能する。
【0081】
本実施形態では、二次関数の二次項aおよび二次関数の相関関数rの関係と、距離Rnの平均Rおよび距離Rnの分散VRの関係とに基づいて良否判定を行ったが、これに限定されるものでない。
すなわち、アーク放電評価方法は、二次関数の二次項aおよび二次関数の相関関数rの関係に基づいて良否判定を行っても構わない。
【0082】
また、アーク放電評価方法は、距離Rnの平均Rおよび距離Rnの分散VRの関係に基づいて良否判定を行っても構わない。
【0083】
以下では、各範囲R1・R2を決定する手順について説明する。
【0084】
図13に示すように、各範囲R1・R2の設定では、未使用の金属ターゲット120を真空容器101内にセットする(S310)。
そして、アーク放電評価装置1は、撮像器10をセットして、未使用の金属ターゲット120と電極130との間にアーク電圧を印加して、未使用の金属ターゲット120の表面を昇華させる(S320、S330)。
【0085】
未使用の金属ターゲット120の表面を昇華させた後、アーク放電評価装置1は、図13および図14に示すように、前述したステップS30〜S80と同様のステップS340〜S390を行う。つまり、アーク放電評価装置1は、未使用の金属ターゲット120におけるアーク放電状態の特徴量を取得する(図14に白塗りの丸で示す座標データ参照)。
【0086】
未使用の金属ターゲット120におけるアーク放電状態の特徴量を取得した後で、図13に示すように、アーク放電評価装置1は、劣化した金属ターゲット120を真空容器101にセットする(S400)。つまり、アーク放電評価装置1は、未使用の金属ターゲット120を劣化した金属ターゲット120に交換する。
【0087】
「劣化した金属ターゲット120」とは、成膜品質が良好でないと判定されたときに表面を昇華させた金属ターゲット120である。このような劣化した金属ターゲット120としては、例えば、硬質薄膜コーティングを繰り返し行うことで表面が窪んだ金属ターゲット120等がある。
【0088】
劣化した金属ターゲット120をセットした後で、データ解析部20は、劣化した金属ターゲット120と電極130との間にアーク電圧を印加する。すなわち、図13および図14に示すように、データ解析部20は、前述したステップS30〜S80と同様の手順で、劣化した金属ターゲット120におけるアーク放電状態の特徴量を取得する(S410、図14に黒塗りの丸で示す座標データ参照)。
【0089】
劣化した金属ターゲット120におけるアーク放電状態の特徴量を取得した後で、データ解析部20は、未使用の金属ターゲット120と劣化した金属ターゲット120とにおけるアーク放電状態の特徴量とを比較して、各範囲R1・R2を設定する(S420)。
【0090】
劣化した金属ターゲット120におけるアーク放電状態の特徴量(図14に黒塗りの丸で示す座標データ)は、未使用の金属ターゲット120におけるアーク放電状態の特徴量(図14に白塗りの丸で示す座標データ)の周囲に分散する。
このため、データ解析部20は、例えば、未使用の金属ターゲット120におけるアーク放電状態の特徴量が集中している部分の周囲を囲む範囲等を、各範囲R1・R2として設定する。
【符号の説明】
【0091】
1 アーク放電評価装置
41 解析画像データ
42 抽出座標データ(抽出した座標データ)
100a アークスポット
120 金属ターゲット(カソード)
130 電極(アノード)
a 二次項(特徴量)
r 相関係数(特徴量)
R 距離の平均(特徴量)
VR 距離の分散(特徴量)
【特許請求の範囲】
【請求項1】
カソードの表面を複数回撮影または前記カソードの表面温度を複数回測定して、前記カソードとアノードとの間に発生させるアーク放電の状態を、複数の解析画像データとして取得する画像取得工程と、
前記画像取得工程にて撮影した解析画像データの所定の位置を原点として、前記各解析画像データを座標データに変換する変換工程と、
前記座標データと所定の閾値とを比較することで、前記座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程と、
前記抽出した座標データを二次関数で回帰して、前記二次関数の二次項と前記二次関数の相関係数とを前記アーク放電状態の特徴量として取得する特徴量取得工程と、
を行う、
アーク放電評価方法。
【請求項2】
前記二次関数の二次項および前記二次関数の相関係数の関係に基づいて、前記アーク放電状態を良否判定する良否判定工程、
をさらに行う、
請求項1に記載のアーク放電評価方法。
【請求項3】
カソードの表面を複数回撮影または前記カソードの表面温度を複数回測定して、前記カソードとアノードとの間に発生させるアーク放電の状態を、複数の解析画像データとして取得する画像取得工程と、
前記画像取得工程にて撮影した解析画像データの所定の位置を原点として、前記解析画像データを座標データに変換する変換工程と、
前記座標データと所定の閾値とを比較することで、前記座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程と、
前記座標データの原点から前記抽出した座標データまで距離の平均と前記距離の分散とを算出し、前記距離の平均と前記距離の分散とを前記アーク放電状態の特徴量として取得する特徴量取得工程と、
を行う、
アーク放電評価方法。
【請求項4】
前記距離の平均および前記距離の分散の関係に基づいて、前記アーク放電状態を良否判定する良否判定工程、
をさらに行う、
請求項3に記載のアーク放電評価方法。
【請求項5】
カソードの表面を複数回撮影または前記カソードの表面温度を複数回測定して、前記カソードとアノードとの間に発生させるアーク放電の状態を、複数の解析画像データとして取得する画像取得工程と、
前記画像取得工程にて撮影した解析画像データの所定の位置を原点として、前記解析画像データを座標データに変換する変換工程と、
前記座標データと所定の閾値とを比較することで、前記座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程と、
前記抽出した座標データを二次関数で回帰するとともに、前記座標データの原点から前記抽出した座標データまで距離の平均と前記距離の分散とを算出し、前記二次関数の二次項と前記二次関数の相関係数と前記距離の平均と前記距離の分散とを前記アーク放電状態の特徴量として取得する特徴量取得工程と、
を行う、
アーク放電評価方法。
【請求項6】
前記二次関数の二次項および前記二次関数の相関係数の関係と、前記距離の平均および前記距離の分散の関係とに基づいて、前記アーク放電状態を良否判定する良否判定工程、
をさらに行う、
請求項5に記載のアーク放電評価方法。
【請求項1】
カソードの表面を複数回撮影または前記カソードの表面温度を複数回測定して、前記カソードとアノードとの間に発生させるアーク放電の状態を、複数の解析画像データとして取得する画像取得工程と、
前記画像取得工程にて撮影した解析画像データの所定の位置を原点として、前記各解析画像データを座標データに変換する変換工程と、
前記座標データと所定の閾値とを比較することで、前記座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程と、
前記抽出した座標データを二次関数で回帰して、前記二次関数の二次項と前記二次関数の相関係数とを前記アーク放電状態の特徴量として取得する特徴量取得工程と、
を行う、
アーク放電評価方法。
【請求項2】
前記二次関数の二次項および前記二次関数の相関係数の関係に基づいて、前記アーク放電状態を良否判定する良否判定工程、
をさらに行う、
請求項1に記載のアーク放電評価方法。
【請求項3】
カソードの表面を複数回撮影または前記カソードの表面温度を複数回測定して、前記カソードとアノードとの間に発生させるアーク放電の状態を、複数の解析画像データとして取得する画像取得工程と、
前記画像取得工程にて撮影した解析画像データの所定の位置を原点として、前記解析画像データを座標データに変換する変換工程と、
前記座標データと所定の閾値とを比較することで、前記座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程と、
前記座標データの原点から前記抽出した座標データまで距離の平均と前記距離の分散とを算出し、前記距離の平均と前記距離の分散とを前記アーク放電状態の特徴量として取得する特徴量取得工程と、
を行う、
アーク放電評価方法。
【請求項4】
前記距離の平均および前記距離の分散の関係に基づいて、前記アーク放電状態を良否判定する良否判定工程、
をさらに行う、
請求項3に記載のアーク放電評価方法。
【請求項5】
カソードの表面を複数回撮影または前記カソードの表面温度を複数回測定して、前記カソードとアノードとの間に発生させるアーク放電の状態を、複数の解析画像データとして取得する画像取得工程と、
前記画像取得工程にて撮影した解析画像データの所定の位置を原点として、前記解析画像データを座標データに変換する変換工程と、
前記座標データと所定の閾値とを比較することで、前記座標データよりアークスポットに対応する部分を、前記解析画像データ毎に抽出する抽出工程と、
前記抽出した座標データを二次関数で回帰するとともに、前記座標データの原点から前記抽出した座標データまで距離の平均と前記距離の分散とを算出し、前記二次関数の二次項と前記二次関数の相関係数と前記距離の平均と前記距離の分散とを前記アーク放電状態の特徴量として取得する特徴量取得工程と、
を行う、
アーク放電評価方法。
【請求項6】
前記二次関数の二次項および前記二次関数の相関係数の関係と、前記距離の平均および前記距離の分散の関係とに基づいて、前記アーク放電状態を良否判定する良否判定工程、
をさらに行う、
請求項5に記載のアーク放電評価方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−112822(P2013−112822A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−256866(P2011−256866)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]