
インバータ制御装置および車両
【課題】変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できるようにする。
【解決手段】インバータ制御装置60は、インバータ20に対して電圧制御信号Vcを出力する電圧変換制御部66aと、電圧変換制御部66aが出力する電圧制御信号Vcの変調率が閾値を超えると、変調率,同期数k,位相等のような電圧制御信号Vcを制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する電圧振幅補正部65a(線形補正部)とを有する。変調率が閾値以下の正弦波制御も当然に線形にできるので、正弦波制御と過変調制御との間における制御モードの切り替えをシームレスに行うことができる。すなわち、電圧指令と出力電圧1次成分とを線形に維持することができる。
【解決手段】インバータ制御装置60は、インバータ20に対して電圧制御信号Vcを出力する電圧変換制御部66aと、電圧変換制御部66aが出力する電圧制御信号Vcの変調率が閾値を超えると、変調率,同期数k,位相等のような電圧制御信号Vcを制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する電圧振幅補正部65a(線形補正部)とを有する。変調率が閾値以下の正弦波制御も当然に線形にできるので、正弦波制御と過変調制御との間における制御モードの切り替えをシームレスに行うことができる。すなわち、電圧指令と出力電圧1次成分とを線形に維持することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転電機に電力を変換して出力するインバータに対し、指令値に基づいて回転電機の回転制御を行う信号を出力するインバータ制御装置と、当該インバータ制御装置を備える車両とに関する。
【背景技術】
【0002】
従来では、PWM(Pulse Width Modulation)制御を行い直流電圧を交流電圧に変換する際、第1の電圧指令値(モータに印加する正弦波状電圧の指令値)の大きさとPWM電圧生成手段の出力電圧の基本波成分の大きさとの関係を線形化し、第1の電圧指令値を補正して第2の電圧指令値を生成する技術の一例が開示されている(例えば特許文献1の請求項1,2を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−309993号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
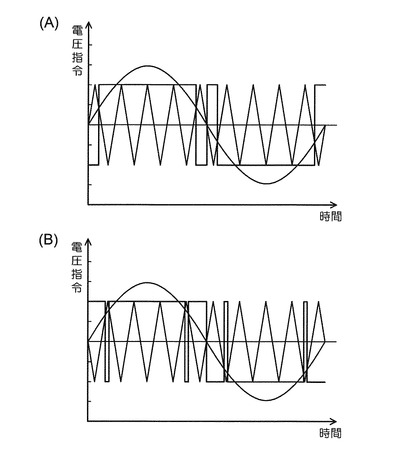
しかし、特許文献1の技術を適用してみると、電圧位相とPWM三角波位相の位相差によっても出力電圧1次成分は変化するため、電圧指令と出力電圧1次成分とが常に線形な関係になるとは限らない。例えば図12(A)に示す経時的変化と図12(B)に示す経時的変化とを比較すると明らかなように、電圧指令値(正弦波)とPWM信号(三角波)との位相に応じて出力電圧(矩形波)が異なる。このため、特に変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わる領域では、電圧指令値が乱れることで電流も乱れ、制御が不安定になる可能性がある。
【0005】
本発明はこのような点に鑑みてなしたものであり、変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できるインバータ制御装置および車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するためになされた請求項1に記載の発明は、回転電機に電力を変換して出力するインバータに対し、指令値に基づいて前記回転電機の回転制御を行う信号を出力するインバータ制御装置において、前記インバータに対して電圧制御信号を出力する電圧変換制御部と、前記電圧変換制御部が出力する電圧制御信号の変調率が閾値を超えると、変調率,同期数,位相等のような前記電圧制御信号を制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する線形補正部とを有することを特徴とする。
【0007】
この構成によれば、電圧制御信号の変調率が1を超える過変調制御では、線形補正部が二以上の変数を引数とする補正用マップを用いて電圧指令と出力電圧とが線形となるように補正する。変調率が1以下の正弦波制御も当然に線形にできるので、正弦波制御と過変調制御との間における制御モードの切り替えをシームレスに行うことができる。すなわち、電圧指令と出力電圧1次成分とを線形に維持することができる。
【0008】
なお「回転電機」は、例えば電動機,電動発電機,発電機等が該当する。「電圧制御信号」は、アナログ信号とデジタル信号とを問わない。「補正用マップ」は、例えば電圧指令振幅補正マップや他のマップ等が該当する。「変調率」は、例えば電圧指令の振幅/(直流電源電圧/2)で算出される値である。「閾値」には任意の数値を設定することができ、例えば1.00から1.15までの間の数値を設定することが多い。
【0009】
請求項2に記載の発明は、前記線形補正部は、前記変調率,前記同期数および前記位相を含めて三以上の変数を引数とする前記補正用マップを用いることを特徴とする。この構成によれば、引数となる変数を増やすことで、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0010】
請求項3に記載の発明は、前記線形補正部は、前記位相を引数とする場合には、前記電圧位相、前記三角波位相、前記電圧位相と前記三角波位相との間の位相差のうちでいずれか一の位相を用いることを特徴とする。この構成によれば、どの位相を引数に用いても、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0011】
請求項4に記載の発明は、前記線形補正部は、前記位相を引数とする場合には、前記電圧位相と前記三角波位相との間の位相差を一定角度変化させたときの補正値の中心値を用いることを特徴とする。この構成によれば、補正値の中心値は簡単な演算で求められ、補正用マップは位相差ごとにデータを記録する必要がなくなるのでデータ量を抑制できる。よって、演算速度を向上させることができ、補正用マップの記録に必要な容量を低減することができる。
【0012】
請求項5に記載の発明は、前記線形補正部は、前記位相を引数とする場合には、前記電圧位相と前記三角波位相との間の位相差を一定角度変化させたときの補正値の平均値を用いることを特徴とする。この構成によれば、補正値の平均値は簡単な演算で求められ、補正用マップは位相差ごとにデータを記録する必要がなくなるのでデータ量を抑制できる。よって、演算速度を向上させることができ、補正用マップの記録に必要な容量を低減することができる。
【0013】
請求項6に記載の発明は、前記線形補正部は、前記変調率および前記同期数を含めて二以上の変数を引数とする前記補正用マップを用いるとともに、前記電圧位相と前記三角波位相との間の位相差を制御する位相差制御信号を前記電圧変換制御部に出力することを特徴とする。この構成によれば、電圧変換制御部は位相差制御信号に基づいて電圧制御信号を出力するので、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0014】
請求項7に記載の発明は、前記線形補正部は、前記変調率を引数とする場合には、電圧増幅率または電圧指令増幅率を用いることを特徴とする。この構成によれば、どの変調率を引数に用いても、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0015】
請求項8に記載の発明は、車両において、請求項1から7のいずれか一項に記載のインバータ制御装置と、前記回転電機と、前記インバータとを有することを特徴とする。この構成によれば、回転電機の回転制御を行うために電圧変換制御部が出力する電圧制御信号の変調率が閾値以下の正弦波領域と変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できる車両を提供できる。
【図面の簡単な説明】
【0016】
【図1】インバータ制御装置を含む電力変換システムの構成例を示す模式図である。
【図2】インバータ制御装置の第1構成例を示す模式図である。
【図3】電圧指令補正処理の第1手続き例を示すフローチャートである。
【図4】三角波位相と電圧1次成分増幅率との関係を示すグラフ図である。
【図5】三角波位相と電圧1次成分増幅率との関係を示すグラフ図である。
【図6】三角波位相と電圧1次成分増幅率との関係を示すグラフ図である。
【図7】三角波位相と電圧1次成分増幅率との関係を示すグラフ図である。
【図8】インバータ制御装置の第2構成例を示す模式図である。
【図9】電圧指令補正処理の第2手続き例を示すフローチャートである。
【図10】インバータ制御装置の第3構成例を示す模式図である。
【図11】車両の構成例を示す模式図である。
【図12】電圧指令値、電圧制御信号および出力電圧の経時的変化を示す図である。
【発明を実施するための形態】
【0017】
以下、本発明を実施するための形態について、図面に基づいて説明する。なお、特に明示しない限り、「接続する」という場合には電気的な接続を意味する。各図は、本発明を説明するために必要な要素を図示し、実際の全要素を図示してはいない。連続符号は記号「〜」を用いて簡略化する。例えば「スイッチング素子Q1〜Q6」は「スイッチング素子Q1,Q2,Q3,Q4,Q5,Q6」を意味する。上下左右等の方向を言う場合には、図面の記載を基準とする。
【0018】
〔実施の形態1〕
実施の形態1は、同期数と入力電圧とに基づいて、電圧指令と出力電圧とが線形となるように電圧指令値を補正する例であって、図1〜図7を参照しながら説明する。図1にはインバータ制御装置を含む電力変換システムの構成例を模式図で示す。図2にはインバータ制御装置の第1構成例を模式図で示す。図3には電圧指令補正処理の第1手続き例をフローチャートで示す。図4〜図7には、それぞれ三角波位相と電圧1次成分増幅率との関係をグラフ図で示す。
【0019】
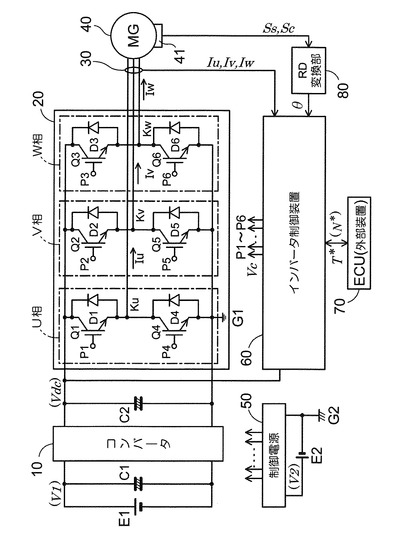
図1に示す電力変換システムは、コンバータ10,インバータ20,制御電源50,インバータ制御装置60などを有する。必要に応じて備えられるコンバータ10は、第1直流電源E1(例えばバッテリ等)から平滑用のコンデンサC1を介して供給される直流電圧(電圧値V1;例えば300[V]等)を、インバータ20で必要とする直流電圧(電圧値Vdc)に変換して出力する機能を担う。なお、コンバータ10の構成や作動等は周知であるので図示および説明を省略する。また、インバータ20が必要とする直流電圧によっては、コンバータ10を用いない場合もある。
【0020】
インバータ20は、供給される直流電圧(電圧値Vdc;例えば660[V]等)を電力変換して回転電機40に出力(伝達)する機能を担う。第1直流電源E1とインバータ20との間には、コンバータ10を介在させている。コンバータ10とインバータ20との間には、平滑用のコンデンサC2が接続される。コンデンサC2は、コンバータ10の出力電圧値(電圧値Vdc)の電位変動を低減する機能を担う。
【0021】
インバータ20は、スイッチング素子Q1〜Q6やダイオードD1〜D6などを有する。スイッチング素子Q1〜Q6には例えばIGBTが用いられ、インバータ制御装置60から個別に伝達される制御信号Spに従ってオン/オフが駆動される。ダイオードD1〜D6は、それぞれ対応するスイッチング素子Q1〜Q6のコレクタ端子とエミッタ端子との間に並列接続される。これらのダイオードD1〜D6は、いずれもフリーホイールダイオードとして機能する。スイッチング素子Q1〜Q3やダイオードD1〜D3などは上アーム側に配置され、スイッチング素子Q4〜Q6やダイオードD4〜D6などは下アーム側に配置される。共通電位G1はインバータ20内で共通する電位(同電位グランド)であり、接地されるグランドG2と接続された場合には0[V]になる。共通電位G1とグランドG2とは必ずしも同電位でない場合があるので、両者は異なる図記号を用いる。
【0022】
インバータ20内の回路素子は、一点鎖線で囲って示すように三相(本例ではU相,V相,W相)に分けられ、インバータ制御装置60によって相ごとに作動が制御される。U相は、スイッチング素子Q1,Q4やダイオードD1,D4などで構成される。V相は、スイッチング素子Q2,Q5やダイオードD2,D5などで構成される。W相は、スイッチング素子Q3,Q6やダイオードD3,D6などで構成される。U相のスイッチング素子Q1,Q4は、直列接続されてハーフブリッジを構成する。V相のスイッチング素子Q2,Q5と、W相のスイッチング素子Q3,Q6とについても同様に、直列接続されてハーフブリッジを構成する。ハーフブリッジの各接続点と回転電機40の三相端子とは、線路Ku,Kv,Kwによって相ごとに接続されている。線路KuにはU相電流Iuが流れ、線路KvにはV相電流Ivが流れ、線路KwにはW相電流Iwが流れる。
【0023】
制御電源50は、第2直流電源E2(例えばバッテリ等)から供給される直流電圧V2(例えば12[V]等)を、コンバータ10やインバータ20等で必要とする電圧や電流に変換して出力する機能を担う。この制御電源50の構成や作動等は周知であるので図示および説明を省略する。これらの制御電源50および第2直流電源E2は、ともにグランドG2に接続されて接地されている。
【0024】
インバータ制御装置60は、コンバータ10やインバータ20等の動作を司る。本発明を実現するためのインバータ制御装置60の構成例については後述する(図2を参照)。インバータ制御装置60が入力する信号には、例えば「外部装置」に相当するECU70から伝達されるトルク指令値T*や、電流センサ30から伝達される電流I(すなわち相電流Iu,Iv,Iw)、レゾルバ41から伝達される信号などが該当する。インバータ制御装置60が出力する信号は、スイッチング素子Q1〜Q6の制御端子P1〜P6に伝達する電圧制御信号Vcや、コンバータ10に備える駆動回路に伝達する電圧制御信号などが該当する。
【0025】
回転電機40は、例えば発電機能と電動機能とを兼ね備える三相の発電電動機(図1には「MG」と記載する)を適用する。電流センサ30には、回転電機40を流れる相電流Iu,Iv,Iwを個々に検出可能なセンサを用いる。例えば、磁気比例型センサ,電磁誘導型センサ,ファラデー効果型センサ,変流器型センサなどが該当する。レゾルバ41は、回転電機40に備える回転部材(例えば主軸やロータ等)の電気角に基づく信号(SIN検出信号SsやCOS検出信号Sc等)を出力する。
【0026】
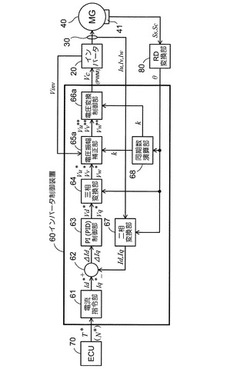
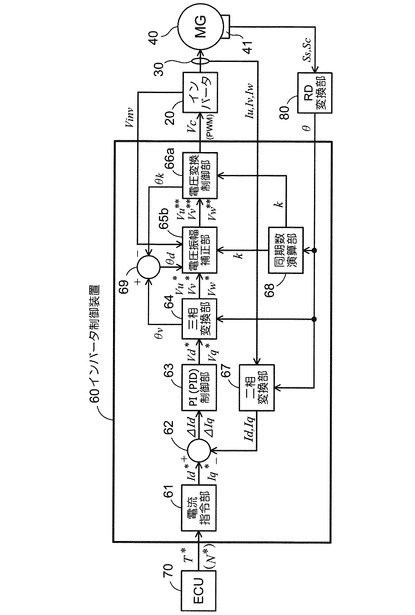
次に図2に示すインバータ制御装置60は、電流指令部61、加合部62,69、PI制御部63、三相変換部64、電圧振幅補正部65a、電圧変換制御部66a、二相変換部67、同期数演算部68などを有する。このインバータ制御装置60は「インバータECU」とも呼ばれる。各要素の機能等については以下に説明する。
【0027】
電流指令部61は、ECU70から伝達されるトルク指令値T*に基づいて、回転電機40を流れる電流I(相電流Iu,Iv,Iw)がトルク指令値T*に対応する指令値に追従するように制御するため、電流指令信号(d軸電流指令値Id*やq軸電流指令値Iq*などを含む)を指令する。
【0028】
加合部62は、入力信号の加え合わせを行う。図2の例では負帰還ループを形成するため、電流指令部61から伝達される電流指令信号と、二相変換部67から伝達されるdq軸電流(すなわちd軸電流Idおよびq軸電流Iq)とを用いる。具体的には、d軸電流指令値Id*からd軸電流Idを差し引き、差分値をd軸電流偏差ΔIdとして出力する。また、q軸電流指令値Iq*からq軸電流Iqを差し引き、差分値をq軸電流偏差ΔIqとして出力する。二相変換部67は、電流センサ30によって検出される電流I(相電流Iu,Iv,Iw)と、RD変換部80から伝達される回転電機40の回転角度θとに基づいて三相・二相変換し、d軸電流Idとq軸電流Iqとを出力する。RD変換部80は、レゾルバ41から出力される信号(SIN検出信号SsやCOS検出信号Sc等)に基づいて、上記回転角度θを演算して出力する。回転角度θは、回転電機40における所定位置を基準とする角度である。所定位置は任意に設定可能であり、ノースマーカの設置に伴う信号を検出することもできる。
【0029】
PI制御部63は、加合部62から伝達される偏差(d軸電流偏差ΔIdおよびq軸電流偏差ΔIq)と、ゲイン(比例ゲインおよび積分ゲイン)とに基づいてPI制御を行うため、電圧位相指令信号(d軸電圧指令値Vd*およびq軸電圧指令値Vq*)を算出して出力する。三相変換部64は、PI制御部63から伝達される電圧位相指令信号と、RD変換部80から伝達される回転電機40の回転角度θとに基づいて二相・三相変換し、相電圧指令信号(U相電圧指令値Vu*,V相電圧指令値Vv*およびW相電圧指令値Vw*を含む)として出力する。
【0030】
電圧振幅補正部65aは「線形補正部」に相当する。この電圧振幅補正部65aは、三相変換部64から伝達される相電圧指令値Vu*,Vv*,Vw*と、インバータ20から伝達される入力電圧Vinvと、同期数演算部68から伝達される同期数kとに基づいて、各相の電圧を補正した相電圧補正指令値(U相電圧補正指令値Vu**,V相電圧補正指令値Vv**,W相電圧補正指令値Vw**を含む)を求めて出力する。相電圧補正指令値は、電圧変換制御部66aが出力する電圧制御信号Vcの変調率が閾値を超える場合に、電圧制御信号Vcを制御する複数の変数(例えば変調率,同期数,位相等)を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように相電圧指令値Vu*,Vv*,Vw*を補正するための値である。
【0031】
一方、電圧制御信号Vcの変調率が閾値以下の場合には、正弦波領域における電圧指令と出力電圧とが線形となるように各相の電圧を補正した相電圧補正指令値を求めて出力する。同期数演算部68は、RD変換部80から伝達される回転電機40の回転角度θに基づいて同期数kを演算して出力する。
【0032】
電圧変換制御部66aは、電圧振幅補正部65aから伝達される相電圧補正指令値Vu**,Vv**,Vw**と、同期数演算部68から伝達される同期数kとに基づいて、インバータ20に含まれる各スイッチング素子を個別に駆動する電圧制御信号Vcを出力する。電圧制御信号Vcにパルス幅変調(PWM)信号を含めるか否かは、任意に設定可能である。
【0033】
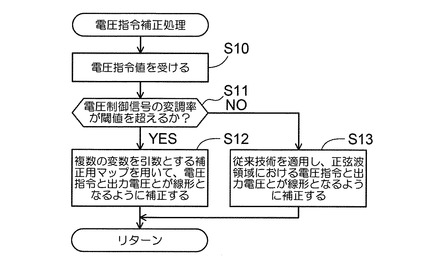
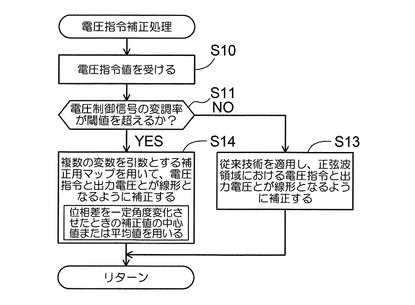
上述のように構成されたインバータ制御装置60(具体的には電圧振幅補正部65a)で実行される電圧指令補正処理の手続きについて、図3を参照しながら説明する。当該図3に示す電圧指令補正処理では、三相変換部64から伝達される相電圧指令値Vu*,Vv*,Vw*を受けると〔ステップS10〕、電圧制御信号Vcの変調率が閾値を超えるか否かを判別する〔ステップS11〕。「閾値」には任意の数値を設定することができる。例えば、普通自動車などでは1.00から1.15までの間の数値を設定することが多い。この閾値は、通常は一定値(例えば1.00から1.15までの間の数値)で維持されるが、変更条件を満たすときに閾値の数値を変更してもよい。変更条件は任意の条件を設定することができる。例えば、電力変換システムの環境が変化(例えば寒冷地と温暖地との間の移動や、冬期と夏期の間の季節変化など)したことや、故障等で別種類の回転電機40に交換されたことなどが該当する。
【0034】
もし電圧制御信号Vcの変調率が閾値を超える場合には(YES)、複数の変数を引数とする補正用マップを用いて電圧指令と出力電圧とが線形となるように補正して、相電圧補正指令値Vu**,Vv**,Vw**を出力し〔ステップS12〕、電圧指令補正処理をリターンする。引数となる複数の変数は、電圧制御信号Vcを制御するための変数である。変数の数は任意に設定でき、補正用マップに合わせるのが望ましい。例えば、変調率,同期数k,位相を含む三以上の変数や、これらの変数の中から適切に選択した二以上の変数が該当する。変調率には、後述する電圧指令増幅率を用いるほか、電圧増幅率を用いてもよい。位相には、後述する三角波位相を用いるほか、電圧位相や、電圧位相と三角波位相との間の位相差などを用いてもよい。補正用マップは、例えば電圧指令振幅補正マップや他のマップ等が該当する。
【0035】
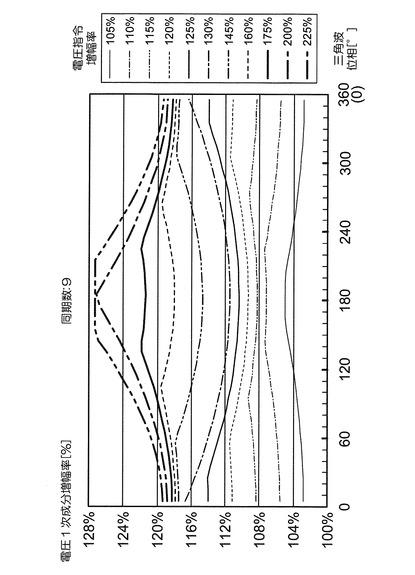
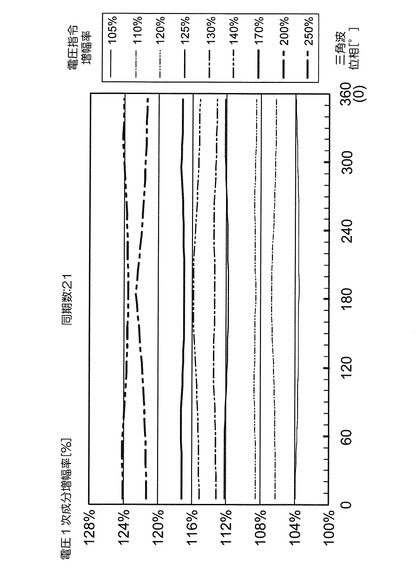
図4〜図7に一例を示す電圧指令振幅補正マップは、横軸を三角波位相[°]とし、縦軸を電圧1次成分増幅率[%]とする場合において、電圧指令と出力電圧とが線形となるような電圧指令増幅率[%]ごとの変化を示す。電圧指令増幅率が120[%]以下を細線で示し、125〜160[%]を中線で示し、170[%]以上を太線で示す。同じ太さの線では、実線、一点鎖線、二点鎖線、破線で区別する。図4の電圧指令振幅補正マップは、同期数kが「9」における電圧指令増幅率[%]ごとの変化を示す。同様に図5の電圧指令振幅補正マップは、同期数kが「21」における電圧指令増幅率[%]ごとの変化を示す。図4〜図7では横軸を三角波位相[°]を用いたが、電圧位相や、電圧位相と三角波位相との間の位相差を用いてもよい。
【0036】
同期数kや電圧指令増幅率は、いずれも一例を示したに過ぎず、他の同期数kや他の電圧指令増幅率についても同様に電圧指令振幅補正マップを規定(記録を含む)してもよい。回転電機40の種類や制御目的等に応じて、適切な同期数kおよび電圧指令増幅率にかかる電圧指令振幅補正マップを規定するのが望ましい。電圧指令振幅補正マップのデータ量を抑えるには、図4や図5に示す電圧指令増幅率で規定し、他の電圧指令増幅率については所定の補間法に従って補間してもよい。所定の補間法には、例えば0次補間(最近傍補間や最近傍点補間とも呼ぶ。)、線形補間(直線補間や1次補間とも呼ぶ。)、放物線補間(2次補間とも呼ぶ。)、多項式補間、キュービック補間(3次補間とも呼ぶ。)、キュービックコンボリューション、ラグランジュ補間、スプライン補間、Sinc関数、ランツォシュ(Lanczos-n)補間などが該当する。
【0037】
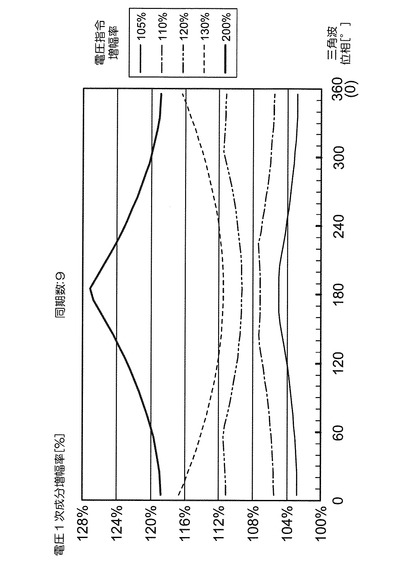
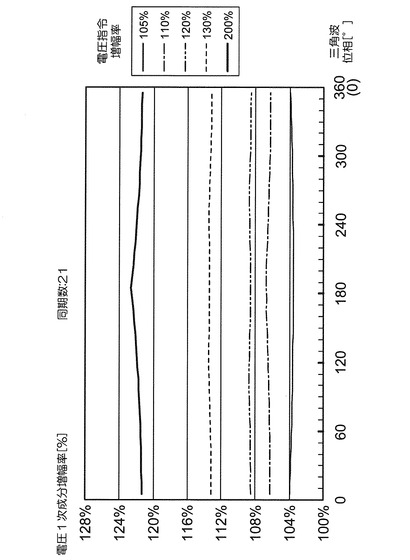
図6および図7は、図4および図5に共通の電圧指令増幅率にかかる変化を参考のために図示したものである。すなわち、電圧指令増幅率が105[%],110[%],120[%],130[%],200[%]について、それぞれ電圧指令と出力電圧とが線形となるような変化を示す。
【0038】
図3に戻って、ステップS11で電圧制御信号Vcの変調率が閾値以下の場合には(NO)、正弦波領域における電圧指令と出力電圧とが線形となるように補正して、相電圧補正指令値Vu**,Vv**,Vw**を出力し〔ステップS13〕、電圧指令補正処理をリターンする。ステップS13の補正は、従来技術を適用することで実現できるので、図示および説明を省略する。このように電圧指令を補正することで、変調率が閾値を超えるか超えないかにかかわらず、電圧指令と出力電圧とが線形になる。
【0039】
上述した実施の形態1によれば、以下に示す各効果を得ることができる。まず請求項1に対応し、回転電機40に電力を変換して出力するインバータ20に対し、指令値に基づいて回転電機40の回転制御を行う信号を出力するインバータ制御装置60において、インバータ20に対して電圧制御信号Vcを出力する電圧変換制御部66aと、電圧変換制御部66aが出力する電圧制御信号Vcの変調率が閾値を超えると、変調率,同期数k,位相等のような電圧制御信号Vcを制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する電圧振幅補正部65a(線形補正部)とを有する構成とした(図2を参照)。この構成によれば、変調率が閾値以下の正弦波制御も当然に線形にできるので、正弦波制御と過変調制御との間における制御モードの切り替えをシームレスに行うことができる。すなわち、電圧指令と出力電圧1次成分とを線形に維持することができる。
【0040】
請求項2に対応し、電圧振幅補正部65aは、変調率,同期数kおよび三角波位相(位相)を含めて三以上の変数を引数とする補正用マップを用いる構成とした(図3のステップS12を参照)。この構成によれば、引数となる変数を増やすことで、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0041】
請求項3に対応し、電圧振幅補正部65aは、位相を引数とする場合には、電圧位相、三角波位相、電圧位相と三角波位相との間の位相差のうちでいずれか一の位相を用いる構成とした(図3のステップS12を参照)。この構成によれば、どの位相を引数に用いても、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0042】
請求項7に対応し、電圧振幅補正部65aは、変調率を引数とする場合には、電圧増幅率または電圧指令増幅率を用いる構成とした(図3のステップS12を参照)。この構成によれば、どの変調率を引数に用いても、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0043】
〔実施の形態2〕
実施の形態2は、同期数,入力電圧および三角波位相に基づいて、電圧指令と出力電圧とが線形となるように電圧指令値を補正する例であって、図8,図9を参照しながら説明する。図8にはインバータ制御装置の第2構成例を模式図で示す。図9には電圧指令補正処理の第2手続き例をフローチャートで示す。なお、電力変換システムの構成等は実施の形態1と同様であるので、説明を簡単にするために実施の形態2では実施の形態1と異なる点について説明する。よって実施の形態1で用いた要素と関連する要素には同一の符号を付して説明を省略する。
【0044】
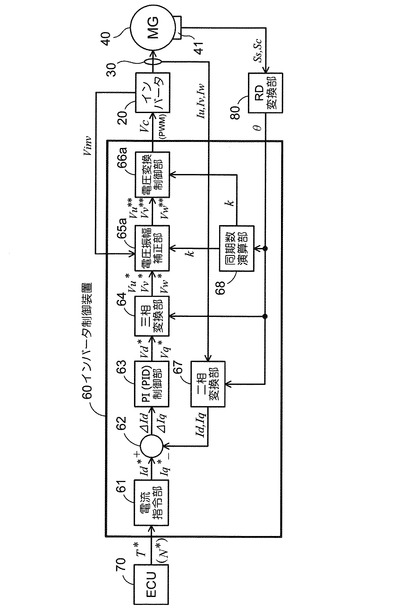
図8に示す第2構成例は、図2に示す第1構成例に代わる。第2構成例は、次の2点で第1構成例と相違する。第1点は、電圧振幅補正部65aに代えて電圧振幅補正部65bを用いる。第2点は、加合部69を追加する。
【0045】
電圧振幅補正部65bは「線形補正部」に相当する。この電圧振幅補正部65bは、電圧振幅補正部65aとほぼ同等の機能を担い、さらに加合部69から伝達される位相差θdに基づいて補正を行う点が相違する。加合部69は、入力信号の加え合わせを行う。図8の例では、三相変換部64から出力される電圧位相θvから、電圧変換制御部66aから出力される三角波位相θkを差し引き、差分値を位相差θdとして出力する。
【0046】
上述のように構成されたインバータ制御装置60(具体的には電圧振幅補正部65b)で実行される電圧指令補正処理の手続きについて、図9を参照しながら説明する。当該図9に示す電圧指令補正処理は、図3に示す電圧指令補正処理に代わる手続き例である。図3に示すステップS12に代えて、後述するステップS14を実行する点で相違する。
【0047】
ステップS11で電圧制御信号Vcの変調率が閾値を超える場合には(YES)、複数の変数を引数とする補正用マップを用いて電圧指令と出力電圧とが線形となるように補正して、相電圧補正指令値Vu**,Vv**,Vw**を出力し〔ステップS14〕、電圧指令補正処理をリターンする。引数となる変数として位相差を用いる場合には、電圧位相と三角波位相との間の位相差を一定角度変化させたときの補正値の中心値を用いたり、電圧位相と三角波位相との間の位相差を一定角度変化させたときの補正値の平均値を用いる。補正用マップは、実施の形態1(図4〜図7)に示す通りである。
【0048】
上述した実施の形態2によれば、以下に示す各効果を得ることができる。なお、請求項1,2,7については実施の形態1と同様の作用効果が得られる。
【0049】
請求項4に対応し、電圧振幅補正部65b(線形補正部)は、位相を引数とする場合には、電圧位相と三角波位相との間の位相差を一定角度変化させたときの補正値の中心値を用いる構成とした(図9のステップS14を参照)。この構成によれば、補正値の中心値は簡単な演算で求められ、補正用マップは位相差ごとにデータを記録する必要がなくなるのでデータ量を抑制できる。よって、演算速度を向上させることができ、補正用マップの記録に必要な容量を低減することができる。
【0050】
請求項5に対応し、電圧振幅補正部65bは、位相を引数とする場合には、電圧位相と三角波位相との間の位相差を一定角度変化させたときの補正値の平均値を用いる構成とした(図9のステップS14を参照)。この構成によれば、補正値の平均値は簡単な演算で求められ、補正用マップは位相差ごとにデータを記録する必要がなくなるのでデータ量を抑制できる。よって、演算速度を向上させることができ、補正用マップの記録に必要な容量を低減することができる。
【0051】
〔実施の形態3〕
実施の形態3は、同期数と入力電圧とに基づいて、電圧指令と出力電圧とが線形となるように電圧指令値を補正する例であって、図10を参照しながら説明する。図10にはインバータ制御装置の第3構成例を模式図で示す。なお、電力変換システムの構成等は実施の形態1と同様であるので、説明を簡単にするために実施の形態3では実施の形態1と異なる点について説明する。よって実施の形態1で用いた要素と関連する要素には同一の符号を付して説明を省略する。
【0052】
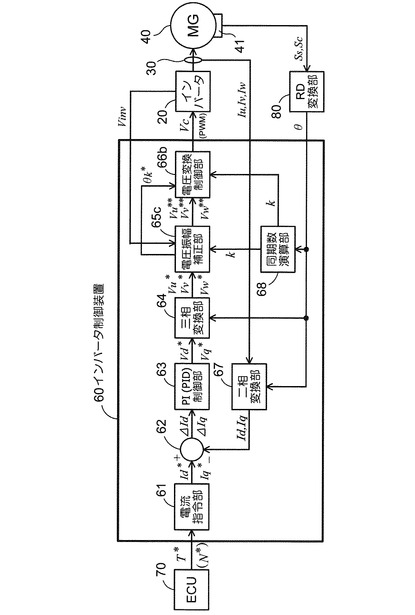
図10に示す第3構成例は、図2に示す第1構成例に代わる。第3構成例は、次の2点で第1構成例と相違する。第1点は、電圧振幅補正部65aに代えて電圧振幅補正部65cを用いる。第2点は、電圧変換制御部66aに代えて電圧変換制御部66bを用いる。電圧振幅補正部65cは「線形補正部」に相当する。この電圧振幅補正部65cは、電圧振幅補正部65aとほぼ同等の機能を担い、さらに三角波位相指令θk*を出力する点が相違する。三角波位相指令θk*は「位相差制御信号」に相当する。電圧変換制御部66bは、さらに電圧振幅補正部65cから伝達される三角波位相指令θk*に基づいて、インバータ20に含まれる各スイッチング素子を個別に駆動する電圧制御信号Vcを出力する点が相違する。
【0053】
上述のように構成されたインバータ制御装置60(具体的には電圧振幅補正部65c)で実行される電圧指令補正処理は、図3に示す電圧指令補正処理または図9に示す電圧指令補正処理が該当する。ただし、図3に示すステップS12および図9に示すステップS14では、さらに三角波位相指令θk*を出力する。補正用マップは、実施の形態1(図4〜図7)に示す通りである。
【0054】
上述した実施の形態3によれば、以下に示す各効果を得ることができる。なお、請求項1,2,7については実施の形態1と同様の作用効果が得られる。
【0055】
請求項6に対応し、電圧振幅補正部65c(線形補正部)は、変調率および同期数kを含めて二以上の変数を引数とする補正用マップを用いるとともに、電圧位相と三角波位相との間の位相差を制御する三角波位相指令θk*(位相差制御信号)を電圧変換制御部66bに出力する構成とした(図10を参照)。この構成によれば、電圧変換制御部66bは三角波位相指令θk*に基づいて電圧制御信号Vcを出力するので、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0056】
〔実施の形態4〕
実施の形態4は、実施の形態1〜3で説明した電力変換システムを車両に適用する例であって、図11を参照しながら説明する。図11には車両の構成例を模式図で示す。なお、電力変換システムの構成等は実施の形態1〜3と同様である。よって、図示および説明を簡単にするため、実施の形態1〜3で用いた要素と同一の要素には同一の符号を付して説明を省略する。
【0057】
図11に示す車両100は、回転電機40および内燃機関(トルク発生源)の双方を動力源として走行可能なハイブリッド自動車(スプリット方式)の一例である。この車両100は、インバータ20および回転電機40に加えて、内燃機関102,バッテリ106,発電機108,動力分割機構110,PCU(パワー・コントロール・ユニット)112,車輪116などを有する。
【0058】
車両100は、内燃機関102および回転電機40の双方を動力源として用い、一方または双方で発生した動力を車輪116に伝達して走行するように構成されている。内燃機関102は例えばガソリンエンジンやディーゼルエンジン等が該当し、炭化水素系燃料を燃焼させることで動力を発生させる。この内燃機関102は、発生させた動力(回転力)を出力軸104に伝達する。回転電機40は、PCU112から供給される電力を受けて動力を発生させる機能と、あるいは動力分割機構110から分割される動力を中継する機能とを有し、一方または双方の動力を回転軸114(伝達軸)に伝達する。
【0059】
バッテリ106は蓄電と放電が可能な蓄電放電手段であり、例えば二次電池や燃料電池等が該当する。発電機108は、動力分割機構110によって分割された動力によって電力を発生させる。通常の発電機を用いてもよく、電動機能と発電機能とを兼ねる電動発電機(図11では「MG」と示す。)を用いてもよい。発生した電力は、PCU112を通じてバッテリ106に蓄電したり、回転電機40を回転駆動させたりする。
【0060】
PCU112は、車両100における電力の授受を司る。具体的には、発電機108で発生した電力をバッテリ106に蓄電する制御や、回転電機40を回転駆動する電力を供給する制御などを行う。このPCU112は、例えばインバータ131,昇圧コンバータ,バッテリECUなどで構成される。バッテリECUは、バッテリ106との間における電力の蓄積や放出等の制御を行う。
【0061】
動力分割機構110は、内燃機関102で発生する動力を分割(分配)する機能を担う。すなわち車両100の状況(すなわち走行や停止等の状態)に応じて、発電機108および回転電機40のうちで一方または双方に動力を伝達する。動力分割機構110は任意に構成可能であるが、例えばキャリア,サンギヤ,プラネタリギヤなどで構成される。
【0062】
インバータ制御装置60には、実施の形態1〜3に示す電圧振幅補正部65a,65b,65cや電圧変換制御部66a,66bなどが含まれている。電流センサ30から伝達される相電流Iu,Iv,Iwや、レゾルバ41から伝達される信号に基づいてRD変換部80から伝達される回転角度θなどに基づいて、車両100に備えられる回転電機40の回転状態が把握できる。電圧指令と出力電圧1次成分とを線形に維持できるので、車両100の走行をスムーズに変化させることができる。
【0063】
上述した実施の形態4によれば、請求項8に対応し、車両100において、請求項1から7のいずれか一項に記載のインバータ制御装置60と、回転電機40と、インバータ20とを備える構成とした(図11を参照)。この構成によれば、回転電機40の回転制御を行うために電圧変換制御部66が出力する電圧制御信号Vcの変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できる車両100を提供できる。なお、請求項1〜7については実施の形態1〜3と同様であるので、各実施の形態に対応する作用効果を得ることができる。
【0064】
〔他の実施の形態〕
以上では本発明を実施するための形態について実施の形態1〜4に従って説明したが、本発明は当該形態に何ら限定されるものではない。言い換えれば、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施することもできる。例えば、次に示す各形態を実現してもよい。
【0065】
上述した実施の形態1〜4では、回転電機40には三相の発電電動機を適用した(図1,図2,図8,図10,図11を参照)。この形態に代えて(あるいは加えて)、他の回転電機を適用してもよい。他の回転電機には、例えば三相以外の相数(二相や四相以上)からなる発電電動機、相数を問わず電動機や発電機などが該当する。電圧制御信号Vcの変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できるので、実施の形態1〜4と同様の作用効果を得ることができる。
【0066】
上述した実施の形態1〜4では、PI制御部63は比例要素と積分要素を含むPI制御を行う構成とした(図2,図5,図7を参照)。この形態に代えて、さらに微分要素を含めてPID制御を行う構成としてもよい。PID制御について、図2,図5,図7では括弧内に示す。回転電機40の性能や用途等によっては回転数Nが急激に変化する場合があり、このような回転電機40についても制御応答性が向上する。
【0067】
上述した実施の形態4では、車両100として回転電機40および内燃機関102の双方を動力源として走行可能なハイブリッド自動車(スプリット方式)を適用した(図9を参照)。この形態に代えて、回転電機40を備える他の車両に適用することもできる。他の車両は、例えば他の方式(シリーズ方式またはパラレル方式)のハイブリッド自動車や、回転電機40の動力のみを利用する車両(いわゆる電気自動車や燃料電池自動車)などが該当する。他の車両であっても形態が相違するに過ぎないので、実施の形態4と同様の作用効果が得られる。
【符号の説明】
【0068】
10 コンバータ
20 インバータ
30 電流センサ
40 回転電機
41 レゾルバ(回転センサ)
60 インバータ制御装置
61 電流指令部
63 PI制御部(PID制御部)
64 三相変換部
65a,65b,65c 電圧振幅補正部(線形補正部)
66a,66b 電圧変換制御部
67 二相変換部
68 同期数演算部
70 ECU(外部装置)
80 RD変換部
100 車両
k 同期数
Vc 電圧制御信号
Vinv 入力電圧
θ 回転角度
θk* 三角波位相指令(位相差制御信号)
【技術分野】
【0001】
本発明は、回転電機に電力を変換して出力するインバータに対し、指令値に基づいて回転電機の回転制御を行う信号を出力するインバータ制御装置と、当該インバータ制御装置を備える車両とに関する。
【背景技術】
【0002】
従来では、PWM(Pulse Width Modulation)制御を行い直流電圧を交流電圧に変換する際、第1の電圧指令値(モータに印加する正弦波状電圧の指令値)の大きさとPWM電圧生成手段の出力電圧の基本波成分の大きさとの関係を線形化し、第1の電圧指令値を補正して第2の電圧指令値を生成する技術の一例が開示されている(例えば特許文献1の請求項1,2を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−309993号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の技術を適用してみると、電圧位相とPWM三角波位相の位相差によっても出力電圧1次成分は変化するため、電圧指令と出力電圧1次成分とが常に線形な関係になるとは限らない。例えば図12(A)に示す経時的変化と図12(B)に示す経時的変化とを比較すると明らかなように、電圧指令値(正弦波)とPWM信号(三角波)との位相に応じて出力電圧(矩形波)が異なる。このため、特に変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わる領域では、電圧指令値が乱れることで電流も乱れ、制御が不安定になる可能性がある。
【0005】
本発明はこのような点に鑑みてなしたものであり、変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できるインバータ制御装置および車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するためになされた請求項1に記載の発明は、回転電機に電力を変換して出力するインバータに対し、指令値に基づいて前記回転電機の回転制御を行う信号を出力するインバータ制御装置において、前記インバータに対して電圧制御信号を出力する電圧変換制御部と、前記電圧変換制御部が出力する電圧制御信号の変調率が閾値を超えると、変調率,同期数,位相等のような前記電圧制御信号を制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する線形補正部とを有することを特徴とする。
【0007】
この構成によれば、電圧制御信号の変調率が1を超える過変調制御では、線形補正部が二以上の変数を引数とする補正用マップを用いて電圧指令と出力電圧とが線形となるように補正する。変調率が1以下の正弦波制御も当然に線形にできるので、正弦波制御と過変調制御との間における制御モードの切り替えをシームレスに行うことができる。すなわち、電圧指令と出力電圧1次成分とを線形に維持することができる。
【0008】
なお「回転電機」は、例えば電動機,電動発電機,発電機等が該当する。「電圧制御信号」は、アナログ信号とデジタル信号とを問わない。「補正用マップ」は、例えば電圧指令振幅補正マップや他のマップ等が該当する。「変調率」は、例えば電圧指令の振幅/(直流電源電圧/2)で算出される値である。「閾値」には任意の数値を設定することができ、例えば1.00から1.15までの間の数値を設定することが多い。
【0009】
請求項2に記載の発明は、前記線形補正部は、前記変調率,前記同期数および前記位相を含めて三以上の変数を引数とする前記補正用マップを用いることを特徴とする。この構成によれば、引数となる変数を増やすことで、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0010】
請求項3に記載の発明は、前記線形補正部は、前記位相を引数とする場合には、前記電圧位相、前記三角波位相、前記電圧位相と前記三角波位相との間の位相差のうちでいずれか一の位相を用いることを特徴とする。この構成によれば、どの位相を引数に用いても、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0011】
請求項4に記載の発明は、前記線形補正部は、前記位相を引数とする場合には、前記電圧位相と前記三角波位相との間の位相差を一定角度変化させたときの補正値の中心値を用いることを特徴とする。この構成によれば、補正値の中心値は簡単な演算で求められ、補正用マップは位相差ごとにデータを記録する必要がなくなるのでデータ量を抑制できる。よって、演算速度を向上させることができ、補正用マップの記録に必要な容量を低減することができる。
【0012】
請求項5に記載の発明は、前記線形補正部は、前記位相を引数とする場合には、前記電圧位相と前記三角波位相との間の位相差を一定角度変化させたときの補正値の平均値を用いることを特徴とする。この構成によれば、補正値の平均値は簡単な演算で求められ、補正用マップは位相差ごとにデータを記録する必要がなくなるのでデータ量を抑制できる。よって、演算速度を向上させることができ、補正用マップの記録に必要な容量を低減することができる。
【0013】
請求項6に記載の発明は、前記線形補正部は、前記変調率および前記同期数を含めて二以上の変数を引数とする前記補正用マップを用いるとともに、前記電圧位相と前記三角波位相との間の位相差を制御する位相差制御信号を前記電圧変換制御部に出力することを特徴とする。この構成によれば、電圧変換制御部は位相差制御信号に基づいて電圧制御信号を出力するので、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0014】
請求項7に記載の発明は、前記線形補正部は、前記変調率を引数とする場合には、電圧増幅率または電圧指令増幅率を用いることを特徴とする。この構成によれば、どの変調率を引数に用いても、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0015】
請求項8に記載の発明は、車両において、請求項1から7のいずれか一項に記載のインバータ制御装置と、前記回転電機と、前記インバータとを有することを特徴とする。この構成によれば、回転電機の回転制御を行うために電圧変換制御部が出力する電圧制御信号の変調率が閾値以下の正弦波領域と変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できる車両を提供できる。
【図面の簡単な説明】
【0016】
【図1】インバータ制御装置を含む電力変換システムの構成例を示す模式図である。
【図2】インバータ制御装置の第1構成例を示す模式図である。
【図3】電圧指令補正処理の第1手続き例を示すフローチャートである。
【図4】三角波位相と電圧1次成分増幅率との関係を示すグラフ図である。
【図5】三角波位相と電圧1次成分増幅率との関係を示すグラフ図である。
【図6】三角波位相と電圧1次成分増幅率との関係を示すグラフ図である。
【図7】三角波位相と電圧1次成分増幅率との関係を示すグラフ図である。
【図8】インバータ制御装置の第2構成例を示す模式図である。
【図9】電圧指令補正処理の第2手続き例を示すフローチャートである。
【図10】インバータ制御装置の第3構成例を示す模式図である。
【図11】車両の構成例を示す模式図である。
【図12】電圧指令値、電圧制御信号および出力電圧の経時的変化を示す図である。
【発明を実施するための形態】
【0017】
以下、本発明を実施するための形態について、図面に基づいて説明する。なお、特に明示しない限り、「接続する」という場合には電気的な接続を意味する。各図は、本発明を説明するために必要な要素を図示し、実際の全要素を図示してはいない。連続符号は記号「〜」を用いて簡略化する。例えば「スイッチング素子Q1〜Q6」は「スイッチング素子Q1,Q2,Q3,Q4,Q5,Q6」を意味する。上下左右等の方向を言う場合には、図面の記載を基準とする。
【0018】
〔実施の形態1〕
実施の形態1は、同期数と入力電圧とに基づいて、電圧指令と出力電圧とが線形となるように電圧指令値を補正する例であって、図1〜図7を参照しながら説明する。図1にはインバータ制御装置を含む電力変換システムの構成例を模式図で示す。図2にはインバータ制御装置の第1構成例を模式図で示す。図3には電圧指令補正処理の第1手続き例をフローチャートで示す。図4〜図7には、それぞれ三角波位相と電圧1次成分増幅率との関係をグラフ図で示す。
【0019】
図1に示す電力変換システムは、コンバータ10,インバータ20,制御電源50,インバータ制御装置60などを有する。必要に応じて備えられるコンバータ10は、第1直流電源E1(例えばバッテリ等)から平滑用のコンデンサC1を介して供給される直流電圧(電圧値V1;例えば300[V]等)を、インバータ20で必要とする直流電圧(電圧値Vdc)に変換して出力する機能を担う。なお、コンバータ10の構成や作動等は周知であるので図示および説明を省略する。また、インバータ20が必要とする直流電圧によっては、コンバータ10を用いない場合もある。
【0020】
インバータ20は、供給される直流電圧(電圧値Vdc;例えば660[V]等)を電力変換して回転電機40に出力(伝達)する機能を担う。第1直流電源E1とインバータ20との間には、コンバータ10を介在させている。コンバータ10とインバータ20との間には、平滑用のコンデンサC2が接続される。コンデンサC2は、コンバータ10の出力電圧値(電圧値Vdc)の電位変動を低減する機能を担う。
【0021】
インバータ20は、スイッチング素子Q1〜Q6やダイオードD1〜D6などを有する。スイッチング素子Q1〜Q6には例えばIGBTが用いられ、インバータ制御装置60から個別に伝達される制御信号Spに従ってオン/オフが駆動される。ダイオードD1〜D6は、それぞれ対応するスイッチング素子Q1〜Q6のコレクタ端子とエミッタ端子との間に並列接続される。これらのダイオードD1〜D6は、いずれもフリーホイールダイオードとして機能する。スイッチング素子Q1〜Q3やダイオードD1〜D3などは上アーム側に配置され、スイッチング素子Q4〜Q6やダイオードD4〜D6などは下アーム側に配置される。共通電位G1はインバータ20内で共通する電位(同電位グランド)であり、接地されるグランドG2と接続された場合には0[V]になる。共通電位G1とグランドG2とは必ずしも同電位でない場合があるので、両者は異なる図記号を用いる。
【0022】
インバータ20内の回路素子は、一点鎖線で囲って示すように三相(本例ではU相,V相,W相)に分けられ、インバータ制御装置60によって相ごとに作動が制御される。U相は、スイッチング素子Q1,Q4やダイオードD1,D4などで構成される。V相は、スイッチング素子Q2,Q5やダイオードD2,D5などで構成される。W相は、スイッチング素子Q3,Q6やダイオードD3,D6などで構成される。U相のスイッチング素子Q1,Q4は、直列接続されてハーフブリッジを構成する。V相のスイッチング素子Q2,Q5と、W相のスイッチング素子Q3,Q6とについても同様に、直列接続されてハーフブリッジを構成する。ハーフブリッジの各接続点と回転電機40の三相端子とは、線路Ku,Kv,Kwによって相ごとに接続されている。線路KuにはU相電流Iuが流れ、線路KvにはV相電流Ivが流れ、線路KwにはW相電流Iwが流れる。
【0023】
制御電源50は、第2直流電源E2(例えばバッテリ等)から供給される直流電圧V2(例えば12[V]等)を、コンバータ10やインバータ20等で必要とする電圧や電流に変換して出力する機能を担う。この制御電源50の構成や作動等は周知であるので図示および説明を省略する。これらの制御電源50および第2直流電源E2は、ともにグランドG2に接続されて接地されている。
【0024】
インバータ制御装置60は、コンバータ10やインバータ20等の動作を司る。本発明を実現するためのインバータ制御装置60の構成例については後述する(図2を参照)。インバータ制御装置60が入力する信号には、例えば「外部装置」に相当するECU70から伝達されるトルク指令値T*や、電流センサ30から伝達される電流I(すなわち相電流Iu,Iv,Iw)、レゾルバ41から伝達される信号などが該当する。インバータ制御装置60が出力する信号は、スイッチング素子Q1〜Q6の制御端子P1〜P6に伝達する電圧制御信号Vcや、コンバータ10に備える駆動回路に伝達する電圧制御信号などが該当する。
【0025】
回転電機40は、例えば発電機能と電動機能とを兼ね備える三相の発電電動機(図1には「MG」と記載する)を適用する。電流センサ30には、回転電機40を流れる相電流Iu,Iv,Iwを個々に検出可能なセンサを用いる。例えば、磁気比例型センサ,電磁誘導型センサ,ファラデー効果型センサ,変流器型センサなどが該当する。レゾルバ41は、回転電機40に備える回転部材(例えば主軸やロータ等)の電気角に基づく信号(SIN検出信号SsやCOS検出信号Sc等)を出力する。
【0026】
次に図2に示すインバータ制御装置60は、電流指令部61、加合部62,69、PI制御部63、三相変換部64、電圧振幅補正部65a、電圧変換制御部66a、二相変換部67、同期数演算部68などを有する。このインバータ制御装置60は「インバータECU」とも呼ばれる。各要素の機能等については以下に説明する。
【0027】
電流指令部61は、ECU70から伝達されるトルク指令値T*に基づいて、回転電機40を流れる電流I(相電流Iu,Iv,Iw)がトルク指令値T*に対応する指令値に追従するように制御するため、電流指令信号(d軸電流指令値Id*やq軸電流指令値Iq*などを含む)を指令する。
【0028】
加合部62は、入力信号の加え合わせを行う。図2の例では負帰還ループを形成するため、電流指令部61から伝達される電流指令信号と、二相変換部67から伝達されるdq軸電流(すなわちd軸電流Idおよびq軸電流Iq)とを用いる。具体的には、d軸電流指令値Id*からd軸電流Idを差し引き、差分値をd軸電流偏差ΔIdとして出力する。また、q軸電流指令値Iq*からq軸電流Iqを差し引き、差分値をq軸電流偏差ΔIqとして出力する。二相変換部67は、電流センサ30によって検出される電流I(相電流Iu,Iv,Iw)と、RD変換部80から伝達される回転電機40の回転角度θとに基づいて三相・二相変換し、d軸電流Idとq軸電流Iqとを出力する。RD変換部80は、レゾルバ41から出力される信号(SIN検出信号SsやCOS検出信号Sc等)に基づいて、上記回転角度θを演算して出力する。回転角度θは、回転電機40における所定位置を基準とする角度である。所定位置は任意に設定可能であり、ノースマーカの設置に伴う信号を検出することもできる。
【0029】
PI制御部63は、加合部62から伝達される偏差(d軸電流偏差ΔIdおよびq軸電流偏差ΔIq)と、ゲイン(比例ゲインおよび積分ゲイン)とに基づいてPI制御を行うため、電圧位相指令信号(d軸電圧指令値Vd*およびq軸電圧指令値Vq*)を算出して出力する。三相変換部64は、PI制御部63から伝達される電圧位相指令信号と、RD変換部80から伝達される回転電機40の回転角度θとに基づいて二相・三相変換し、相電圧指令信号(U相電圧指令値Vu*,V相電圧指令値Vv*およびW相電圧指令値Vw*を含む)として出力する。
【0030】
電圧振幅補正部65aは「線形補正部」に相当する。この電圧振幅補正部65aは、三相変換部64から伝達される相電圧指令値Vu*,Vv*,Vw*と、インバータ20から伝達される入力電圧Vinvと、同期数演算部68から伝達される同期数kとに基づいて、各相の電圧を補正した相電圧補正指令値(U相電圧補正指令値Vu**,V相電圧補正指令値Vv**,W相電圧補正指令値Vw**を含む)を求めて出力する。相電圧補正指令値は、電圧変換制御部66aが出力する電圧制御信号Vcの変調率が閾値を超える場合に、電圧制御信号Vcを制御する複数の変数(例えば変調率,同期数,位相等)を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように相電圧指令値Vu*,Vv*,Vw*を補正するための値である。
【0031】
一方、電圧制御信号Vcの変調率が閾値以下の場合には、正弦波領域における電圧指令と出力電圧とが線形となるように各相の電圧を補正した相電圧補正指令値を求めて出力する。同期数演算部68は、RD変換部80から伝達される回転電機40の回転角度θに基づいて同期数kを演算して出力する。
【0032】
電圧変換制御部66aは、電圧振幅補正部65aから伝達される相電圧補正指令値Vu**,Vv**,Vw**と、同期数演算部68から伝達される同期数kとに基づいて、インバータ20に含まれる各スイッチング素子を個別に駆動する電圧制御信号Vcを出力する。電圧制御信号Vcにパルス幅変調(PWM)信号を含めるか否かは、任意に設定可能である。
【0033】
上述のように構成されたインバータ制御装置60(具体的には電圧振幅補正部65a)で実行される電圧指令補正処理の手続きについて、図3を参照しながら説明する。当該図3に示す電圧指令補正処理では、三相変換部64から伝達される相電圧指令値Vu*,Vv*,Vw*を受けると〔ステップS10〕、電圧制御信号Vcの変調率が閾値を超えるか否かを判別する〔ステップS11〕。「閾値」には任意の数値を設定することができる。例えば、普通自動車などでは1.00から1.15までの間の数値を設定することが多い。この閾値は、通常は一定値(例えば1.00から1.15までの間の数値)で維持されるが、変更条件を満たすときに閾値の数値を変更してもよい。変更条件は任意の条件を設定することができる。例えば、電力変換システムの環境が変化(例えば寒冷地と温暖地との間の移動や、冬期と夏期の間の季節変化など)したことや、故障等で別種類の回転電機40に交換されたことなどが該当する。
【0034】
もし電圧制御信号Vcの変調率が閾値を超える場合には(YES)、複数の変数を引数とする補正用マップを用いて電圧指令と出力電圧とが線形となるように補正して、相電圧補正指令値Vu**,Vv**,Vw**を出力し〔ステップS12〕、電圧指令補正処理をリターンする。引数となる複数の変数は、電圧制御信号Vcを制御するための変数である。変数の数は任意に設定でき、補正用マップに合わせるのが望ましい。例えば、変調率,同期数k,位相を含む三以上の変数や、これらの変数の中から適切に選択した二以上の変数が該当する。変調率には、後述する電圧指令増幅率を用いるほか、電圧増幅率を用いてもよい。位相には、後述する三角波位相を用いるほか、電圧位相や、電圧位相と三角波位相との間の位相差などを用いてもよい。補正用マップは、例えば電圧指令振幅補正マップや他のマップ等が該当する。
【0035】
図4〜図7に一例を示す電圧指令振幅補正マップは、横軸を三角波位相[°]とし、縦軸を電圧1次成分増幅率[%]とする場合において、電圧指令と出力電圧とが線形となるような電圧指令増幅率[%]ごとの変化を示す。電圧指令増幅率が120[%]以下を細線で示し、125〜160[%]を中線で示し、170[%]以上を太線で示す。同じ太さの線では、実線、一点鎖線、二点鎖線、破線で区別する。図4の電圧指令振幅補正マップは、同期数kが「9」における電圧指令増幅率[%]ごとの変化を示す。同様に図5の電圧指令振幅補正マップは、同期数kが「21」における電圧指令増幅率[%]ごとの変化を示す。図4〜図7では横軸を三角波位相[°]を用いたが、電圧位相や、電圧位相と三角波位相との間の位相差を用いてもよい。
【0036】
同期数kや電圧指令増幅率は、いずれも一例を示したに過ぎず、他の同期数kや他の電圧指令増幅率についても同様に電圧指令振幅補正マップを規定(記録を含む)してもよい。回転電機40の種類や制御目的等に応じて、適切な同期数kおよび電圧指令増幅率にかかる電圧指令振幅補正マップを規定するのが望ましい。電圧指令振幅補正マップのデータ量を抑えるには、図4や図5に示す電圧指令増幅率で規定し、他の電圧指令増幅率については所定の補間法に従って補間してもよい。所定の補間法には、例えば0次補間(最近傍補間や最近傍点補間とも呼ぶ。)、線形補間(直線補間や1次補間とも呼ぶ。)、放物線補間(2次補間とも呼ぶ。)、多項式補間、キュービック補間(3次補間とも呼ぶ。)、キュービックコンボリューション、ラグランジュ補間、スプライン補間、Sinc関数、ランツォシュ(Lanczos-n)補間などが該当する。
【0037】
図6および図7は、図4および図5に共通の電圧指令増幅率にかかる変化を参考のために図示したものである。すなわち、電圧指令増幅率が105[%],110[%],120[%],130[%],200[%]について、それぞれ電圧指令と出力電圧とが線形となるような変化を示す。
【0038】
図3に戻って、ステップS11で電圧制御信号Vcの変調率が閾値以下の場合には(NO)、正弦波領域における電圧指令と出力電圧とが線形となるように補正して、相電圧補正指令値Vu**,Vv**,Vw**を出力し〔ステップS13〕、電圧指令補正処理をリターンする。ステップS13の補正は、従来技術を適用することで実現できるので、図示および説明を省略する。このように電圧指令を補正することで、変調率が閾値を超えるか超えないかにかかわらず、電圧指令と出力電圧とが線形になる。
【0039】
上述した実施の形態1によれば、以下に示す各効果を得ることができる。まず請求項1に対応し、回転電機40に電力を変換して出力するインバータ20に対し、指令値に基づいて回転電機40の回転制御を行う信号を出力するインバータ制御装置60において、インバータ20に対して電圧制御信号Vcを出力する電圧変換制御部66aと、電圧変換制御部66aが出力する電圧制御信号Vcの変調率が閾値を超えると、変調率,同期数k,位相等のような電圧制御信号Vcを制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する電圧振幅補正部65a(線形補正部)とを有する構成とした(図2を参照)。この構成によれば、変調率が閾値以下の正弦波制御も当然に線形にできるので、正弦波制御と過変調制御との間における制御モードの切り替えをシームレスに行うことができる。すなわち、電圧指令と出力電圧1次成分とを線形に維持することができる。
【0040】
請求項2に対応し、電圧振幅補正部65aは、変調率,同期数kおよび三角波位相(位相)を含めて三以上の変数を引数とする補正用マップを用いる構成とした(図3のステップS12を参照)。この構成によれば、引数となる変数を増やすことで、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0041】
請求項3に対応し、電圧振幅補正部65aは、位相を引数とする場合には、電圧位相、三角波位相、電圧位相と三角波位相との間の位相差のうちでいずれか一の位相を用いる構成とした(図3のステップS12を参照)。この構成によれば、どの位相を引数に用いても、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0042】
請求項7に対応し、電圧振幅補正部65aは、変調率を引数とする場合には、電圧増幅率または電圧指令増幅率を用いる構成とした(図3のステップS12を参照)。この構成によれば、どの変調率を引数に用いても、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0043】
〔実施の形態2〕
実施の形態2は、同期数,入力電圧および三角波位相に基づいて、電圧指令と出力電圧とが線形となるように電圧指令値を補正する例であって、図8,図9を参照しながら説明する。図8にはインバータ制御装置の第2構成例を模式図で示す。図9には電圧指令補正処理の第2手続き例をフローチャートで示す。なお、電力変換システムの構成等は実施の形態1と同様であるので、説明を簡単にするために実施の形態2では実施の形態1と異なる点について説明する。よって実施の形態1で用いた要素と関連する要素には同一の符号を付して説明を省略する。
【0044】
図8に示す第2構成例は、図2に示す第1構成例に代わる。第2構成例は、次の2点で第1構成例と相違する。第1点は、電圧振幅補正部65aに代えて電圧振幅補正部65bを用いる。第2点は、加合部69を追加する。
【0045】
電圧振幅補正部65bは「線形補正部」に相当する。この電圧振幅補正部65bは、電圧振幅補正部65aとほぼ同等の機能を担い、さらに加合部69から伝達される位相差θdに基づいて補正を行う点が相違する。加合部69は、入力信号の加え合わせを行う。図8の例では、三相変換部64から出力される電圧位相θvから、電圧変換制御部66aから出力される三角波位相θkを差し引き、差分値を位相差θdとして出力する。
【0046】
上述のように構成されたインバータ制御装置60(具体的には電圧振幅補正部65b)で実行される電圧指令補正処理の手続きについて、図9を参照しながら説明する。当該図9に示す電圧指令補正処理は、図3に示す電圧指令補正処理に代わる手続き例である。図3に示すステップS12に代えて、後述するステップS14を実行する点で相違する。
【0047】
ステップS11で電圧制御信号Vcの変調率が閾値を超える場合には(YES)、複数の変数を引数とする補正用マップを用いて電圧指令と出力電圧とが線形となるように補正して、相電圧補正指令値Vu**,Vv**,Vw**を出力し〔ステップS14〕、電圧指令補正処理をリターンする。引数となる変数として位相差を用いる場合には、電圧位相と三角波位相との間の位相差を一定角度変化させたときの補正値の中心値を用いたり、電圧位相と三角波位相との間の位相差を一定角度変化させたときの補正値の平均値を用いる。補正用マップは、実施の形態1(図4〜図7)に示す通りである。
【0048】
上述した実施の形態2によれば、以下に示す各効果を得ることができる。なお、請求項1,2,7については実施の形態1と同様の作用効果が得られる。
【0049】
請求項4に対応し、電圧振幅補正部65b(線形補正部)は、位相を引数とする場合には、電圧位相と三角波位相との間の位相差を一定角度変化させたときの補正値の中心値を用いる構成とした(図9のステップS14を参照)。この構成によれば、補正値の中心値は簡単な演算で求められ、補正用マップは位相差ごとにデータを記録する必要がなくなるのでデータ量を抑制できる。よって、演算速度を向上させることができ、補正用マップの記録に必要な容量を低減することができる。
【0050】
請求項5に対応し、電圧振幅補正部65bは、位相を引数とする場合には、電圧位相と三角波位相との間の位相差を一定角度変化させたときの補正値の平均値を用いる構成とした(図9のステップS14を参照)。この構成によれば、補正値の平均値は簡単な演算で求められ、補正用マップは位相差ごとにデータを記録する必要がなくなるのでデータ量を抑制できる。よって、演算速度を向上させることができ、補正用マップの記録に必要な容量を低減することができる。
【0051】
〔実施の形態3〕
実施の形態3は、同期数と入力電圧とに基づいて、電圧指令と出力電圧とが線形となるように電圧指令値を補正する例であって、図10を参照しながら説明する。図10にはインバータ制御装置の第3構成例を模式図で示す。なお、電力変換システムの構成等は実施の形態1と同様であるので、説明を簡単にするために実施の形態3では実施の形態1と異なる点について説明する。よって実施の形態1で用いた要素と関連する要素には同一の符号を付して説明を省略する。
【0052】
図10に示す第3構成例は、図2に示す第1構成例に代わる。第3構成例は、次の2点で第1構成例と相違する。第1点は、電圧振幅補正部65aに代えて電圧振幅補正部65cを用いる。第2点は、電圧変換制御部66aに代えて電圧変換制御部66bを用いる。電圧振幅補正部65cは「線形補正部」に相当する。この電圧振幅補正部65cは、電圧振幅補正部65aとほぼ同等の機能を担い、さらに三角波位相指令θk*を出力する点が相違する。三角波位相指令θk*は「位相差制御信号」に相当する。電圧変換制御部66bは、さらに電圧振幅補正部65cから伝達される三角波位相指令θk*に基づいて、インバータ20に含まれる各スイッチング素子を個別に駆動する電圧制御信号Vcを出力する点が相違する。
【0053】
上述のように構成されたインバータ制御装置60(具体的には電圧振幅補正部65c)で実行される電圧指令補正処理は、図3に示す電圧指令補正処理または図9に示す電圧指令補正処理が該当する。ただし、図3に示すステップS12および図9に示すステップS14では、さらに三角波位相指令θk*を出力する。補正用マップは、実施の形態1(図4〜図7)に示す通りである。
【0054】
上述した実施の形態3によれば、以下に示す各効果を得ることができる。なお、請求項1,2,7については実施の形態1と同様の作用効果が得られる。
【0055】
請求項6に対応し、電圧振幅補正部65c(線形補正部)は、変調率および同期数kを含めて二以上の変数を引数とする補正用マップを用いるとともに、電圧位相と三角波位相との間の位相差を制御する三角波位相指令θk*(位相差制御信号)を電圧変換制御部66bに出力する構成とした(図10を参照)。この構成によれば、電圧変換制御部66bは三角波位相指令θk*に基づいて電圧制御信号Vcを出力するので、制御モードを切り替える際に制御が不安定になるのを防止できる。
【0056】
〔実施の形態4〕
実施の形態4は、実施の形態1〜3で説明した電力変換システムを車両に適用する例であって、図11を参照しながら説明する。図11には車両の構成例を模式図で示す。なお、電力変換システムの構成等は実施の形態1〜3と同様である。よって、図示および説明を簡単にするため、実施の形態1〜3で用いた要素と同一の要素には同一の符号を付して説明を省略する。
【0057】
図11に示す車両100は、回転電機40および内燃機関(トルク発生源)の双方を動力源として走行可能なハイブリッド自動車(スプリット方式)の一例である。この車両100は、インバータ20および回転電機40に加えて、内燃機関102,バッテリ106,発電機108,動力分割機構110,PCU(パワー・コントロール・ユニット)112,車輪116などを有する。
【0058】
車両100は、内燃機関102および回転電機40の双方を動力源として用い、一方または双方で発生した動力を車輪116に伝達して走行するように構成されている。内燃機関102は例えばガソリンエンジンやディーゼルエンジン等が該当し、炭化水素系燃料を燃焼させることで動力を発生させる。この内燃機関102は、発生させた動力(回転力)を出力軸104に伝達する。回転電機40は、PCU112から供給される電力を受けて動力を発生させる機能と、あるいは動力分割機構110から分割される動力を中継する機能とを有し、一方または双方の動力を回転軸114(伝達軸)に伝達する。
【0059】
バッテリ106は蓄電と放電が可能な蓄電放電手段であり、例えば二次電池や燃料電池等が該当する。発電機108は、動力分割機構110によって分割された動力によって電力を発生させる。通常の発電機を用いてもよく、電動機能と発電機能とを兼ねる電動発電機(図11では「MG」と示す。)を用いてもよい。発生した電力は、PCU112を通じてバッテリ106に蓄電したり、回転電機40を回転駆動させたりする。
【0060】
PCU112は、車両100における電力の授受を司る。具体的には、発電機108で発生した電力をバッテリ106に蓄電する制御や、回転電機40を回転駆動する電力を供給する制御などを行う。このPCU112は、例えばインバータ131,昇圧コンバータ,バッテリECUなどで構成される。バッテリECUは、バッテリ106との間における電力の蓄積や放出等の制御を行う。
【0061】
動力分割機構110は、内燃機関102で発生する動力を分割(分配)する機能を担う。すなわち車両100の状況(すなわち走行や停止等の状態)に応じて、発電機108および回転電機40のうちで一方または双方に動力を伝達する。動力分割機構110は任意に構成可能であるが、例えばキャリア,サンギヤ,プラネタリギヤなどで構成される。
【0062】
インバータ制御装置60には、実施の形態1〜3に示す電圧振幅補正部65a,65b,65cや電圧変換制御部66a,66bなどが含まれている。電流センサ30から伝達される相電流Iu,Iv,Iwや、レゾルバ41から伝達される信号に基づいてRD変換部80から伝達される回転角度θなどに基づいて、車両100に備えられる回転電機40の回転状態が把握できる。電圧指令と出力電圧1次成分とを線形に維持できるので、車両100の走行をスムーズに変化させることができる。
【0063】
上述した実施の形態4によれば、請求項8に対応し、車両100において、請求項1から7のいずれか一項に記載のインバータ制御装置60と、回転電機40と、インバータ20とを備える構成とした(図11を参照)。この構成によれば、回転電機40の回転制御を行うために電圧変換制御部66が出力する電圧制御信号Vcの変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できる車両100を提供できる。なお、請求項1〜7については実施の形態1〜3と同様であるので、各実施の形態に対応する作用効果を得ることができる。
【0064】
〔他の実施の形態〕
以上では本発明を実施するための形態について実施の形態1〜4に従って説明したが、本発明は当該形態に何ら限定されるものではない。言い換えれば、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施することもできる。例えば、次に示す各形態を実現してもよい。
【0065】
上述した実施の形態1〜4では、回転電機40には三相の発電電動機を適用した(図1,図2,図8,図10,図11を参照)。この形態に代えて(あるいは加えて)、他の回転電機を適用してもよい。他の回転電機には、例えば三相以外の相数(二相や四相以上)からなる発電電動機、相数を問わず電動機や発電機などが該当する。電圧制御信号Vcの変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できるので、実施の形態1〜4と同様の作用効果を得ることができる。
【0066】
上述した実施の形態1〜4では、PI制御部63は比例要素と積分要素を含むPI制御を行う構成とした(図2,図5,図7を参照)。この形態に代えて、さらに微分要素を含めてPID制御を行う構成としてもよい。PID制御について、図2,図5,図7では括弧内に示す。回転電機40の性能や用途等によっては回転数Nが急激に変化する場合があり、このような回転電機40についても制御応答性が向上する。
【0067】
上述した実施の形態4では、車両100として回転電機40および内燃機関102の双方を動力源として走行可能なハイブリッド自動車(スプリット方式)を適用した(図9を参照)。この形態に代えて、回転電機40を備える他の車両に適用することもできる。他の車両は、例えば他の方式(シリーズ方式またはパラレル方式)のハイブリッド自動車や、回転電機40の動力のみを利用する車両(いわゆる電気自動車や燃料電池自動車)などが該当する。他の車両であっても形態が相違するに過ぎないので、実施の形態4と同様の作用効果が得られる。
【符号の説明】
【0068】
10 コンバータ
20 インバータ
30 電流センサ
40 回転電機
41 レゾルバ(回転センサ)
60 インバータ制御装置
61 電流指令部
63 PI制御部(PID制御部)
64 三相変換部
65a,65b,65c 電圧振幅補正部(線形補正部)
66a,66b 電圧変換制御部
67 二相変換部
68 同期数演算部
70 ECU(外部装置)
80 RD変換部
100 車両
k 同期数
Vc 電圧制御信号
Vinv 入力電圧
θ 回転角度
θk* 三角波位相指令(位相差制御信号)
【特許請求の範囲】
【請求項1】
回転電機に電力を変換して出力するインバータに対し、指令値に基づいて前記回転電機の回転制御を行う信号を出力するインバータ制御装置において、
前記インバータに対して電圧制御信号を出力する電圧変換制御部と、
前記電圧変換制御部が出力する電圧制御信号の変調率が閾値を超えると、変調率,同期数,位相等のような前記電圧制御信号を制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する線形補正部と、
を有することを特徴とするインバータ制御装置。
【請求項2】
前記線形補正部は、前記変調率,前記同期数および前記位相を含めて三以上の変数を引数とする前記補正用マップを用いることを特徴とする請求項1に記載のインバータ制御装置。
【請求項3】
前記線形補正部は、前記位相を引数とする場合には、前記電圧位相、前記三角波位相、前記電圧位相と前記三角波位相との間の位相差のうちでいずれか一の位相を用いることを特徴とする請求項2に記載のインバータ制御装置。
【請求項4】
前記線形補正部は、前記位相を引数とする場合には、前記電圧位相と前記三角波位相との間の位相差を一定角度変化させたときの補正値の中心値を用いることを特徴とする請求項2に記載のインバータ制御装置。
【請求項5】
前記線形補正部は、前記位相を引数とする場合には、前記電圧位相と前記三角波位相との間の位相差を一定角度変化させたときの補正値の平均値を用いることを特徴とする請求項2に記載のインバータ制御装置。
【請求項6】
前記線形補正部は、前記変調率および前記同期数を含めて二以上の変数を引数とする前記補正用マップを用いるとともに、前記電圧位相と前記三角波位相との間の位相差を制御する位相差制御信号を前記電圧変換制御部に出力することを特徴とする請求項1に記載のインバータ制御装置。
【請求項7】
前記線形補正部は、前記変調率を引数とする場合には、電圧増幅率または電圧指令増幅率を用いることを特徴とする請求項2,3または6に記載のインバータ制御装置。
【請求項8】
請求項1から7のいずれか一項に記載のインバータ制御装置と、前記回転電機と、前記インバータと、を有することを特徴とする車両。
【請求項1】
回転電機に電力を変換して出力するインバータに対し、指令値に基づいて前記回転電機の回転制御を行う信号を出力するインバータ制御装置において、
前記インバータに対して電圧制御信号を出力する電圧変換制御部と、
前記電圧変換制御部が出力する電圧制御信号の変調率が閾値を超えると、変調率,同期数,位相等のような前記電圧制御信号を制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する線形補正部と、
を有することを特徴とするインバータ制御装置。
【請求項2】
前記線形補正部は、前記変調率,前記同期数および前記位相を含めて三以上の変数を引数とする前記補正用マップを用いることを特徴とする請求項1に記載のインバータ制御装置。
【請求項3】
前記線形補正部は、前記位相を引数とする場合には、前記電圧位相、前記三角波位相、前記電圧位相と前記三角波位相との間の位相差のうちでいずれか一の位相を用いることを特徴とする請求項2に記載のインバータ制御装置。
【請求項4】
前記線形補正部は、前記位相を引数とする場合には、前記電圧位相と前記三角波位相との間の位相差を一定角度変化させたときの補正値の中心値を用いることを特徴とする請求項2に記載のインバータ制御装置。
【請求項5】
前記線形補正部は、前記位相を引数とする場合には、前記電圧位相と前記三角波位相との間の位相差を一定角度変化させたときの補正値の平均値を用いることを特徴とする請求項2に記載のインバータ制御装置。
【請求項6】
前記線形補正部は、前記変調率および前記同期数を含めて二以上の変数を引数とする前記補正用マップを用いるとともに、前記電圧位相と前記三角波位相との間の位相差を制御する位相差制御信号を前記電圧変換制御部に出力することを特徴とする請求項1に記載のインバータ制御装置。
【請求項7】
前記線形補正部は、前記変調率を引数とする場合には、電圧増幅率または電圧指令増幅率を用いることを特徴とする請求項2,3または6に記載のインバータ制御装置。
【請求項8】
請求項1から7のいずれか一項に記載のインバータ制御装置と、前記回転電機と、前記インバータと、を有することを特徴とする車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−125013(P2012−125013A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2010−272445(P2010−272445)
【出願日】平成22年12月7日(2010.12.7)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成22年12月7日(2010.12.7)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]