
エアサポート式ベルトコンベヤ
【課題】 ヘッドプーリの位置を自在に移動可能とし、搬送経路の所望の位置へ搬送物を移動させることを可能とするエアサポート式ベルトコンベヤを提供する。
【解決手段】 搬送ベルト(11)によって搬送される搬送物(M)の重量と搬送ベルト(11)の重量および張力を支持するためのベルト支持手段(40)を搬送経路に沿って複数備える。ヘッドプーリ移動手段(30)の移動時において移動を妨げる位置に該当するベルト支持手段(40)は、内部にエア貯留室(42)を有する半円筒形状のベルト支持体(41)を備える。そのベルト支持体(41)の半円筒形の内面と前記搬送ベルト(11)との間にエア層を形成するエア噴射孔(43)を前記エア貯留室(42)に連通してベルト支持体(41)に設ける。また、ヘッドプーリ移動手段(30)が上流側あるいは下流側へ移動する際に邪魔にならない位置へベルト支持体(41)を待避させる待避機構(50)を備える。
【解決手段】 搬送ベルト(11)によって搬送される搬送物(M)の重量と搬送ベルト(11)の重量および張力を支持するためのベルト支持手段(40)を搬送経路に沿って複数備える。ヘッドプーリ移動手段(30)の移動時において移動を妨げる位置に該当するベルト支持手段(40)は、内部にエア貯留室(42)を有する半円筒形状のベルト支持体(41)を備える。そのベルト支持体(41)の半円筒形の内面と前記搬送ベルト(11)との間にエア層を形成するエア噴射孔(43)を前記エア貯留室(42)に連通してベルト支持体(41)に設ける。また、ヘッドプーリ移動手段(30)が上流側あるいは下流側へ移動する際に邪魔にならない位置へベルト支持体(41)を待避させる待避機構(50)を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送ベルトをエアにてサポートするエアサポート式ベルトコンベヤの技術に関する。 特に、ヘッドプーリの位置を自在に移動可能とすることによって搬送物を搬送経路の所望の位置へ運ぶことを可能としたサポートするエアサポート式ベルトコンベヤに関する。
【背景技術】
【0002】
一般に、鉱石や石炭等(「バラモノ」と称する)の搬送物を一定方向に連続的に運搬するベルトコンベヤの中間排出方式としては、トリッパー方式、スクレーパ方式、斜板方式がある。
トリッパー方式とは、ベルトの途中で搬送物を荷降しすることができるベルトコンベヤである。 スクレーパ方式は、走行しているベルト表面にゴムベルトまたは鋼板を押しつけて運搬物をせきとめ、ベルトの側方(片側)に荷降しするベルトコンベヤである。 斜板方式は、V型のスクレーパであり、搬送物をベルトの両側に荷降しするベルトコンベヤである。
さらに、ベルトコンベヤを中心として左右を貯炭場として使用するための配炭機を備えたベルトコンベヤがある。たとえば、トリッパーとシャトルコンベヤとを一体構造としたベルトコンベヤ本体移動式などが知られている。
【0003】
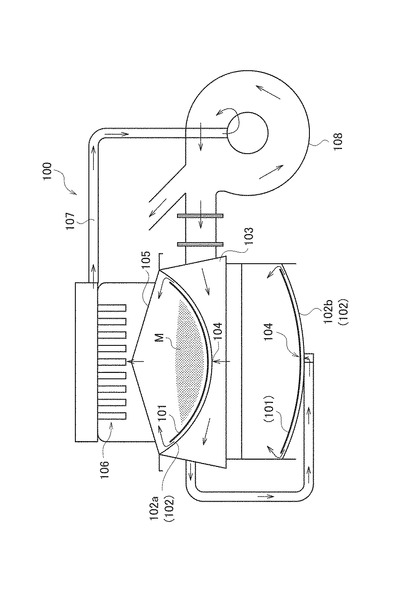
さて、搬送ベルトの動力としてエアを用いるエアサポート式ベルトコンベヤが、近年は注目を集めている。 代表的なエアサポート式ベルトコンベヤについて、図11を用いて説明する。
図11に示すエアサポート式ベルトコンベヤ100は、の紙面に対して垂直方向へ走行する無端環状の搬送ベルト101と、その搬送ベルト101を支持するベルト受け部材102と、を備える。 そのベルト受け部材102は、キャリア側ベルト受け部材102aとリターン側ベルト受け部材102bとからなる。 またキャリア側ベルト受け部材102aの下側には、エア供給源として例えばエアブロア108から供給されるエアを充填するプレナムチャンバ103が設けられている。
【0004】
前記の搬送ベルト101は、上部に位置するキャリア側搬送ベルト101にて搬送物Mを搬送した後に、下部に位置するリターン側搬送ベルト101となって回転する。
また、前記キャリア側ベルト受け部材102aおよびリターン側ベルト受け部材102bのそれぞれの表面には、プレナムチャンバ103に連通するエア吹出し孔104が設けられている。
更に、エア吹出し孔104から前記キャリア側ベルト受け部材102aと前記キャリア側搬送ベルト101との間へエアを供給してエア層を形成する。 エア吹出し孔104から前記リターン側ベルト受け部材102bと前記リターン側搬送ベルト101との間へエアを供給してエア層を形成する。
搬送ベルト101の全体は、トラフ105によってほぼ完全に密閉される。エアは、トラフ105に連通するエアフィルタ106を経て清浄なエアとなって、エアダクト107を通過して再びエアブロア108からプレナムチャンバ103へ供給されて循環する。
【0005】
以上のように、搬送ベルト101は、エア吹出し孔104から吹出されるエアによってサポートされるので、摩擦抵抗が少なく、大容量の搬送物Mが容易に搬送される。
このエアサポート式ベルトコンベヤに関連する技術として特許文献1を抽出した。
特許文献1に開示されているエアサポート式ベルトコンベヤは密閉構造なので、例えば鉱石や石炭等の搬送物において舞い上がる粉塵を封じ込めることができるため、衛生的である。この衛生面に関する特徴により、食品(たとえば穀物)などを搬送するベルトコンベヤとして有望視されている。
【0006】
さて、ベルトコンベヤに対しては、搬送物の落下場所(到達位置)を状況に応じて変更したいというニーズもある。
そのニーズに応える技術としては、たとえば特許文献2に開示された技術がある。 これは、搬送物の落下場所にヘッドプーリを移動させることが可能であるように、ヘッドプーリの移動によって余ったベルトを収納する構造を備えたベルトコンベヤに関する技術である。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平9−175618号公報
【特許文献2】特開2008−280161号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
前述した技術では、次のような問題が生じていた。
第一に、図11に示したトリッパー方式では、搬送物Mの落下させる位置の関係からベルトコンベヤの(特に上方の)設置スペースを大きくする必要がある。このため、ベルトコンベヤの設置場所が制限される場合や、ベルトコンベヤ設置場所の諸条件に合わせたオーダーメードが必要な場合が生じていた。オーダーメードの場合には、ベルトコンベヤの生産効率が悪く、コスト高になってしまう。
また、スクレーパ方式および斜板方式では、ベルト上にスクレーパを載置するため、任意の位置に荷降しすることが困難であり、かつ荷降しがトリッパーのように完全に排出することができない、という問題があった。
【0009】
特許文献1に示すようなエアサポート式ベルトコンベヤでは、搬送物をベルトコンベヤの搬送方向の途中で落とすことができない。
一方、搬送物をベルトコンベヤの搬送方向の途中で落とすには、特許文献2に開示されているような技術があるが、密閉構造ではないために、衛生面でのニーズを確保するために多大な労力を要していた。 チェーンコンベヤを採用する場合には、搬送物が変更されるたびに、搬送物がふれる部分(ケース内側、チェーン及びアタッチメントなど)全てを分解清掃や消毒する、という手間が掛かっていた。またチェーンに潤滑油を必要とする場合、その潤滑油が搬送物に付着するという問題は回避しがたい。
【0010】
本願発明が解決しようとする課題は、ヘッドプーリの位置を自在に移動可能とし、搬送経路の所望の位置へ搬送物を移動させることを可能とするエアサポート式ベルトコンベヤを提供することにある。
【課題を解決するための手段】
【0011】
(第一の発明)
本願における第一の発明は、 搬送物(M)を搬送物投入口(23)から下流側に位置する到達位置(たとえば搬送物受け口24a,24b,・・・)へ搬送させるとともに前記到達位置を変更可能なエアサポート式ベルトコンベヤ(10)に係る。
前記搬送物投入口(23)の近傍にて水平に固定された回転軸にて回転可能なテールプーリ(12)と、 水平な回転軸の位置を変更可能なヘッドプーリ(32)と、 そのヘッドプーリ(32)および前記テールプーリ(12)に掛け渡された搬送ベルト(11)と、 前記ヘッドプーリ(32)の回転軸を支持するとともにその回転軸の移動軌跡を形成するレール部材(33,33)と、 そのレール部材(33,33)に沿ってヘッドプーリ(32)およびその回転軸を移動させるためのヘッドプーリ移動手段(30)と、 そのヘッドプーリ移動手段(30)が移動することによって弛むまたは伸張する前記搬送ベルト(11)を収納または搬出させるとともにその搬送ベルト(11)を所定のテンションに保つ搬送ベルト収納機構(80)と、を備える。
また、前記搬送ベルト(11)によって搬送される搬送物(M)の重量と搬送ベルト(11)の重量および張力を支持するためのベルト支持手段(40)を搬送経路に沿って複数備える。
更に、ヘッドプーリ移動手段(30)の移動時において移動を妨げる位置に該当するベルト支持手段(40)は、内部にエア貯留室(42)を有する半円筒形状のベルト支持体(41)と、 そのベルト支持体(41)の半円筒形の内面と前記搬送ベルト(11)との間にエア層を形成すべく前記搬送ベルト(11)に向けて前記エア貯留室(42)のエアを噴射する複数のエア噴射孔(43,43,・・・)と、を備えるとともに、 ヘッドプーリ移動手段(30)が上流側あるいは下流側へ移動する際に邪魔にならない位置へベルト支持体(41)を待避させる待避機構(50)を備える。
【0012】
(作用)
搬送物(M)の到達位置(搬送物受け口24a,24b,・・・)を、所望の任意位置へ変更することが可能なエアサポート式ベルトコンベヤ(10)である。
まず、搬送物投入口(23)から最も遠い到達位置(「最長到達位置」とする)へ搬送させる場合には、搬送物投入口(23)から最も離れた位置にヘッドプーリ(32)が位置し、ヘッドプーリ(32)およびその回転軸はレール部材(33,33)の端部に位置することとなる。そして、全てのベルト支持手段(40)が搬送ベルト(11)を支持し、搬送ベルト収納機構(80)が収納する搬送ベルト(11)は、最も短くなる。
【0013】
搬送物投入口(23)から最も遠い到達位置よりは近い到達位置(「目的到達位置」とする)へ搬送させる場合には、ヘッドプーリ移動手段(30)が搬送物投入口(23)側へ、つまり上流側へ移動する。その移動の際に、待避機構(50)によって、移動方向直前のベルト支持手段(40)のベルト支持体(41)を待避位置に移動させ、ヘッドプーリ移動手段(30)の移動の際に邪魔にならない位置へ移動する。ヘッドプーリ移動手段(30)がヘッドプーリ(32)およびその回転軸を、レール部材(33,33)に沿って目的到達位置の近傍まで移動させる。
ヘッドプーリ移動手段(30)が通過後には、上記の待避位置に移動した当該ベルト支持手段(40)のベルト支持体(41)を待避機構(50)によって、搬送ベルト(11)を支持させることができる位置へ戻しておく。
最長到達位置と目的到達位置との間の搬送ベルト(11)が不要となって、搬送ベルト(11)が弛んだ状態となるので、搬送ベルト収納機構(80)が搬送ベルト(11)を収納し、所定のテンションを保つ。また、搬送物投入口(23)と目的到達位置との間に位置するベルト支持手段(40) が搬送ベルト(11)を支持する。
【0014】
目的到達位置を最長到達位置の方向へ近づける場合には、ヘッドプーリ移動手段(30)が下流側へ移動する。その移動の際に、待避機構(50)によって、移動方向直前のベルト支持手段(40)のベルト支持体(41)を待避位置に移動させ、ヘッドプーリ移動手段(30)の移動の際に邪魔にならない位置へ移動する。ヘッドプーリ移動手段(30)がヘッドプーリ(32)およびその回転軸を、レール部材(33,33)に沿って変更後の目的到達位置の近傍まで移動させる。
ヘッドプーリ移動手段(30)が通過後には、上記の待避位置に移動していた当該ベルト支持手段(40)のベルト支持体(41)を待避機構(50)によって、搬送ベルト(11)を支持させることができる位置へ戻しておく。それによって、変更前の目的到達位置と変更後の目的到達位置との間に位置するベルト支持手段(40)が、新たに搬送ベルト(11)を支持するために加えられる。
変更前の目的到達位置と変更後の目的到達位置との間の分だけ、搬送ベルト(11)が伸張するので、搬送ベルト収納機構(80)が搬送ベルト(11)を所定のテンションに保つように、収納していた搬送ベルト(11)を搬出する。
【0015】
搬送ベルト(11)は、複数のベルト支持体(41,41,・・・)によって支持され、エア貯留室(42)から複数のエア噴射孔(43,43,・・・)に対してエアが供給され、搬送ベルト(11)に向けて噴射するので、各ベルト支持体(41)の半円筒形の内面と搬送ベルト(11)との間にエア層が形成される。したがって、搬送ベルト(11)は、エアにて浮上した状態でベルト支持体(41)によって支持されながら下流側へ移動する。 このため、搬送ベルト(11)に載せられた搬送物(M)は、低騒音、省動力にて搬送される。 コンベア(10)の全体をほぼ完全に密閉することも可能である。
【0016】
(第一の発明のバリエーション1)
第一の発明は、以下のようなバリエーションを提供することもできる。
すなわち、 前記待避機構(50)は、前記搬送経路に沿って延伸した本体フレーム(21)と、その本体フレーム(21)に設けた支軸(51)を中心にして前記複数のベルト支持体(41,41,…)をその半円のほぼ中心位置で搬送方向を遮る方向と待避する方向へ回転するベルト支持体回転装置(60)と、を備えたエアサポート式ベルトコンベヤ(10)としてもよい。
【0017】
(作用)
複数の各ベルト支持体(41,41,…)は、それぞれ支軸(51)を中心にして各ベルト支持体(41,41,…)の半円のほぼ中心位置で回転するので、ヘッドプーリ移動手段(30)を上流側または下流側へ移動させる際に、ヘッドプーリ移動手段(30)の移動の邪魔にならない位置へ待避する。ヘッドプーリ移動手段(30)が通過した後は、ベルト支持体(41,41,…)にて搬送ベルト(11)を支持させることができる位置へ戻しておく。
【0018】
(第一の発明のバリエーション2)
第一の発明は、以下のようなバリエーションを提供することもできる。
すなわち、 前記支軸(51)は、前記搬送経路に沿って延伸させ、その支軸(51)がエアを供給するエア供給管としてもよい。
【0019】
(作用)
支軸(51)は、エアを供給するエア供給管とすることによって、エアを支軸(51)のエア供給管から各ベルト支持体(41,41,…)のエア貯留室(42,42,…)へ簡単に供給することになる。つまり、支軸(51)とは別途にエア供給管を設けると、そのエア供給管は各ベルト支持体(41,41,…)の回転時に邪魔になるが、支軸(51)がエア供給管を兼用することによって、各ベルト支持体(41,41,…)の回転動作が容易である。
【0020】
(第一の発明のバリエーション3)
第一の発明における前記バリエーション1または2は、以下のようなバリエーションを提供することもできる。
すなわち、 前記ベルト支持体回転装置(60)は、各ベルト支持体(41,41,…)における半円筒の外周面のほぼ対角線上に突出して設けたガイドレール(61)と、前記ヘッドプーリ移動手段(30)が通過前に前記ガイドレール(61)へ突き当てて前記ベルト支持体(41)を待避位置へ向けて回転するべくヘッドプーリ移動手段(30)に設けた突き当て部材(37)と、前記ヘッドプーリ移動手段(30)が通過後に前記ベルト支持体(41)を回転して搬送ベルト(11)を支持させることができる位置へ戻す復帰用回転装置(62)と、を備えたエアサポート式ベルトコンベヤ(10)としてもよい。
【0021】
(作用)
ガイドレール(61)が各ベルト支持体(41,41,…)における半円筒の外周面に半らせん状に設けられているので、ヘッドプーリ移動手段(30)が移動する際に、突き当て部材(37)が前記ガイドレール(61)へ突き当たることによって、ベルト支持体(41)が待避位置へ向けて回転する。ヘッドプーリ移動手段(30)が通過した後は、復帰用回転装置(62)によって前記ベルト支持体(41)が回転して搬送ベルト(11)を支持させることができる位置へ戻って再び搬送ベルト(11)を支持する。
【0022】
(第一の発明のバリエーション4)
第一の発明における前記バリエーション3は、以下のようなバリエーションを提供することもできる。
すなわち、 前記ガイドレール(61)は、各ベルト支持体(41,41,…)における半円筒の外周面の2つのほぼ対角線上に設けた前進用ガイドレール(61a)と後退用ガイドレール(61b)とで構成し、 前記突き当て部材(37)は、前記ヘッドプーリ移動手段(30)が下流側へ移動する時に前記前進用ガイドレール(61a)へ突き当てる前進用突き当て部材(37a)と、前記ヘッドプーリ移動手段(30)が上流側へ移動する時に前記後退用ガイドレール(61b)へ突き当てる後退用突き当て部材(37b)と、を備えたエアサポート式ベルトコンベヤ(10)としてもよい。
【0023】
(作用)
ヘッドプーリ移動手段(30)が下流側へ前進移動する時は、前進用突き当て部材(37a)がベルト支持体(41)における前進用ガイドレール(61a)へ突き当たることによってベルト支持体(41)が待避位置へ向けて回転する。ヘッドプーリ移動手段(30)が上流側へ後退移動する時は、後退用突き当て部材(37b)がベルト支持体(41)における後退用ガイドレール(61b)へ突き当たることによってベルト支持体(41)が待避位置へ向けて回転する。
前進用ガイドレール(61a)と後退用ガイドレール(61b)を、各ベルト支持体(41,41,…)における半円筒の外周面の2つのほぼ対角線上に設けたので、ヘッドプーリ移動手段(30)が下流側と上流側のいずれの方向へ向けて移動する場合であっても、ベルト支持体(41)が同じ方向で待避位置へ向けて回転する。
その結果、ベルト支持体(41)の一側縁を支持部材にて片持ちで支持して支軸(51)を中心に回転可能にすれば、そのベルト支持体(41)は前記支持部材が搬送ベルト(11)にぶつからない方向へ回転することができる。
【0024】
(第一の発明のバリエーション5)
第一の発明における前記バリエーション4は、以下のようなバリエーションを提供することもできる。
すなわち、 前記復帰用回転装置(62)は、待避位置のベルト支持体(41)に対して搬送ベルト(11)を支持させることができる位置へ戻す方向へ押し出すための押し出し装置(63)と、その押し出し装置(63)にて押し出す側のベルト支持体(41)の一側縁に設けた重り(64)と、を備える。
【0025】
(作用)
押し出し装置(63)によって、待避位置のベルト支持体(41)を搬送ベルト(11)を支持させることができる位置へ戻す方向へ押し出した時、重り(64)がその回転の頂点を通過すると、その重り(64)の重さによってベルト支持体(41)が自動的に回転して搬送ベルト(11)を支持させることができる位置へ戻る。
【発明の効果】
【0026】
第一の発明によれば、ヘッドプーリの位置を自在に移動可能とし、搬送経路の所望の位置へ搬送物を移動させることを可能とするエアサポート式ベルトコンベヤを提供することができた。
【図面の簡単な説明】
【0027】
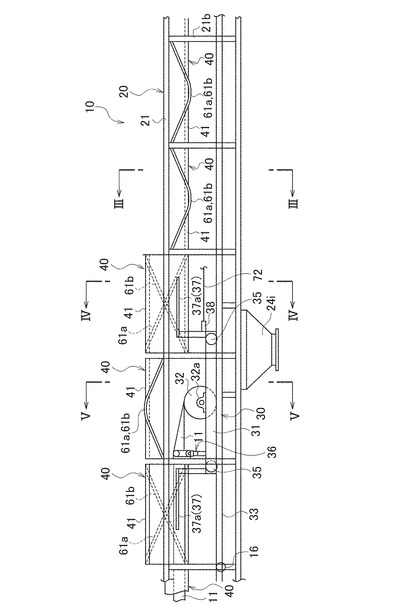
【図1】本発明の実施形態に係るエアサポート式ベルトコンベヤの全体構成を示した側面図である。
【図2】図1のエアサポート式ベルトコンベヤにおけるヘッドプーリ付近を示した斜視図である。
【図3】図8における矢視III−III線の断面図である。
【図4】図8における矢視IV−IV線の断面図である。
【図5】図8における矢視V−V線の断面図である。
【図6】図1のエアサポート式ベルトコンベヤにおけるベルトコンベヤ本体ユニットの下流側先端部分を拡大した側面図である。
【図7】図6の平面図である。
【図8】図1のエアサポート式ベルトコンベヤにおけるベルトコンベヤ本体ユニットの中間部分を拡大した側面図である。
【図9】図1のエアサポート式ベルトコンベヤにおけるベルトコンベヤ本体ユニットの上流側のベルト貯めユニット付近を拡大した側面図である。
【図10】ヘッドプーリを上流側または下流側に移動させた場合の搬送物の積載状況を示す概略説明図である。
【図11】従来の実施形態に係るエアサポート式ベルトコンベヤの全体構成を正面から視た概略的な断面図である。
【発明を実施するための形態】
【0028】
本発明の実施形態について、図面を参照しながら説明する。ここで使用する図面は、図1から図9である。
【0029】
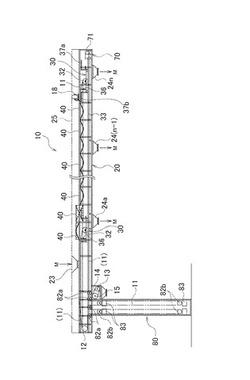
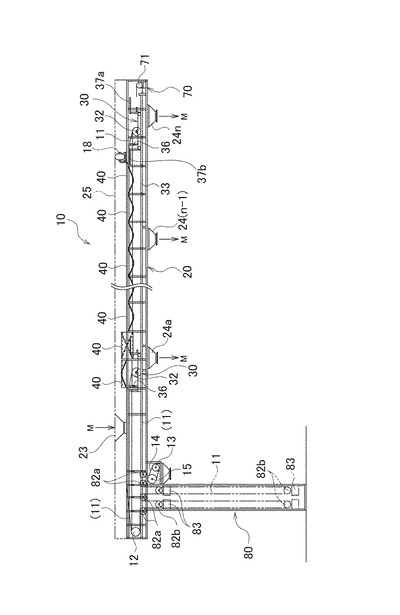
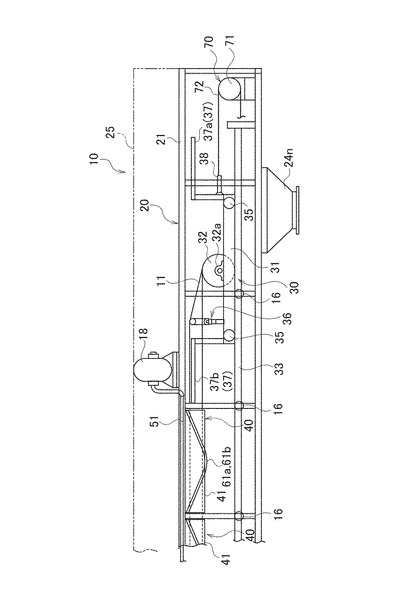
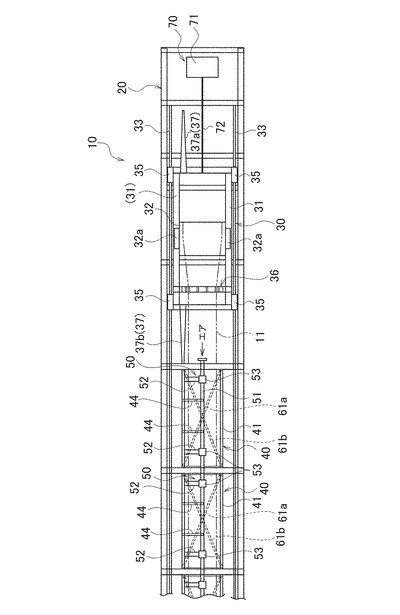
図1は、搬送位置可変型のエアサポート式ベルトコンベヤ10(以下、単に「ベルトコンベヤ」という)の全体構成を示した側面図である。
ベルトコンベヤ10は、搬送ベルト11をエアにてサポートするとともに、ヘッドプーリ32を上流側および下流側へ移動させることで、搬送ベルト11上に載置された搬送物Mを下流側の任意の位置へ自在に落下させることが可能である。なお、搬送物Mとしては、例えば、鉱石や石炭などの鉱物、大豆やトウモロコシや米や麦などの穀物、その他の種々の材料がある。
ベルトコンベヤ10は、ベルトコンベヤ本体ユニット20と、ヘッドプーリ32を台車で移動させるヘッドプーリ台車ユニット30(ヘッドプーリ移動手段)と、搬送経路に沿って複数備えたベルト支持装置40(ベルト支持手段)と、ウィンチユニット70と、ベルト貯めユニット80(搬送ベルト収納機構)と、を備えている。
【0030】
(ベルトコンベヤ本体ユニット)
図1、図2および図3に示すように、ベルトコンベヤ本体ユニット20は、コンベヤ本体フレーム21と、手摺22と、搬送物投入口23と、搬送物受け口24と、トラフ25とを備えている。
また、ベルトコンベヤ本体ユニット20は、その先端側にて上流側と下流側へ移動できるように配置されたヘッドプーリ32と、そのヘッドプーリ32の反対側の端部に位置するテールプーリ12と、前記ヘッドプーリ32とテールプーリ12を架け渡して配置された搬送ベルト11とを備える。
【0031】
さらに、駆動モータ13から駆動チェーン14を介して伝達した駆動力によって駆動する駆動プーリ15と、リターン側の搬送ベルト11を回転しながら支持するリターンローラ16を備えている。さらに、テールプーリ12からベルト支持装置40(ベルト支持手段)の最上流位置までの間で搬送ベルト11を徐々に搬送方向に対して垂直な断面において湾曲形状に変角するための変角ローラ17(図9を参照)を備えている。
【0032】
コンベヤ本体フレーム21は、床面から垂直に立設された縦部材21aと、その縦部材21aの反床面側に直交し、搬送ベルト11の搬送方向に沿って架け渡された横梁21bとによって略矩形状に形成される。
手摺22は、前記コンベヤ本体フレーム21を中心とした両側に配置されるとともに、移動式ベルトコンベヤ10のメンテナンス時に作業員が歩行可能な歩廊26および歩廊26の歩行時の安全性確保のために設置されたものである。
【0033】
搬送物投入口23は、上流側に位置して前記コンベヤ本体フレーム21の上部に設けており、搬送物Mを投入する。その搬送物投入口23には、開閉するための投入用ハッチ(図示は表示しない)を備えている。
搬送物受け口24は、下流側の適宜位置に配置して前記コンベヤ本体フレーム21の下部に設けており、前記搬送物投入口23から投入された搬送物Mが搬送ベルト11にて搬送されてから落下させる。その搬送物受け口24には、開閉するための排出用ハッチ(図示は表示しない)を備えている。
【0034】
本実施形態では、上流側から順に、(最短位置の)一番目の搬送物受け口24a、二番目の搬送物受け口24b、三番目の搬送物受け口24c、・・・・・・・・(最長位置の)n番目の搬送物受け口24nとする。任意位置のi番目は、搬送物受け口24iと称する。
トラフ25は、図3に示すように、前記コンベヤ本体フレーム21の全体をほぼ完全に密閉した状態で覆うものである。なお、図2ではトラフ25を図示省略している。
【0035】
(ヘッドプーリ台車ユニット30)
ヘッドプーリ台車ユニット30は、台車フレーム31の上に載置されたヘッドプーリ32を移動可能なユニットである。そのユニットは、搬送ベルト11の幅方向に所定間隔にて離して配置された二本のレール33,33(レール部材)と、車輪軸34の両端に設置され、各レール33,33に沿って移動可能に嵌め込まれた車輪35,35と、台車フレーム31上に載置されたヘッドプーリ32とを備える。
【0036】
ヘッドプーリ32は、図2に示すように、ヘッドプーリ軸受32aにヘッドプーリ軸32bが嵌合されて台車フレーム31の上端部に固定されている。台車フレーム31には、フック38が固定され、このフック38にヘッドプーリ32を搬送ベルト11の搬送方向に沿って前後に移動させるワイヤーロープ72が連結されている。このワイヤーロープ72は、ウィンチユニット70の駆動力によってヘッドプーリ32を前後に移動させる。
このヘッドプーリ32の移動範囲としては、図1に示した上流側から一番目の搬送物受け口24aを上流限界とし、n番目の搬送物受け口24nを下流限界とした範囲であり、この範囲内では自在に移動可能となっている。
【0037】
また、図2、図6および図7に示すように、台車フレーム31の上流端側には、湾曲した状態の搬送ベルト11を下側から支持するベルト支持ローラ部36が設けられている。搬送ベルト11は、詳しくは後述する半円筒形状のエアチャンバ41にて湾曲した状態で支持されて移動する。ベルト支持ローラ部36は、前記エアチャンバ41の下流端から外れた搬送ベルト11をほぼ同じ位置で下側から支持するものである。
ベルト支持ローラ部36は、台車フレーム31の下流側の上部に固定したキャリアスタンド36aと、そのキャリアスタンド36aの上部に湾曲形成した湾曲面に複数のローラ固定部材36bを介して設けた複数のキャリアローラ36cとを備える。本実施形態では、図3に示すように、5個のキャリアローラ36cを設けている。各キャリアローラ36cは、内部にベアリングを内蔵し、そのベアリングによって回転する。
その結果、エアチャンバ41にて支持される搬送ベルト11が、そのエアチャンバ41の下流端からヘッドプーリ32へ向けてスムーズに移動することになる。
【0038】
(ベルト支持装置)
ベルト支持装置40は、搬送ベルト11によって搬送される搬送物Mの重量と搬送ベルト11の重量および張力を支持するものである。なお、本実施形態では、複数のベルト支持装置40(ベルト支持手段)が搬送経路に沿って直列的に配置されている。
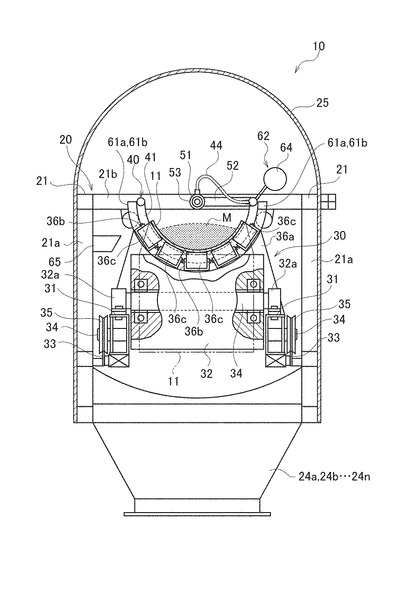
そのベルト支持装置40は、図4に示すように、内部にエア貯留室42を有する半円筒形状のベルト支持体であるエアチャンバ41と、そのエアチャンバ41の半円筒形の内面から搬送ベルト11に向けて前記エア貯留室42のエアを噴射する複数のエア噴射孔43と、を備えている。
本実施形態では、複数のエア噴射孔43は、エアチャンバ41の長手方向に垂直な断面において半円のほぼ中央位置に、当該エアチャンバ41の長手方向に向けて適宜間隔に設けている。
【0039】
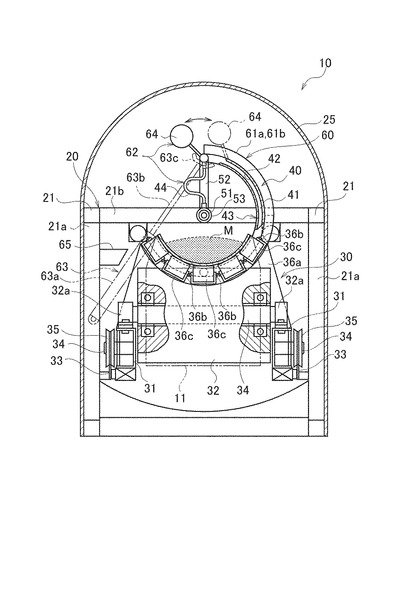
各エアチャンバ41は、常時、搬送ベルト11を支持させることができる位置(本実施形態では「原位置」という)に位置する。その原位置は、ヘッドプーリ台車ユニット30の移動時において移動を妨げる位置となる。しかし、ヘッドプーリ台車ユニット30の通過に応じて各エアチャンバ41を回転することによって、ヘッドプーリ台車ユニット30の移動の邪魔にならない位置(本実施形態では、「待避位置」という)へ待避する待避機構50を備えている。
【0040】
待避機構50は、コンベヤ本体フレーム21に設けた支軸51を中心にして、前記複数のエアチャンバ41をその半円のほぼ中心位置で、搬送ベルト11の搬送方向を遮る方向と、その逆に待避する方向へ回転するベルト支持体回転装置60を備えて構成されている。
【0041】
支軸51は、コンベヤ本体フレーム21の上部に、そのコンベヤ本体フレーム21の幅方向のほぼ中央に位置して、前記搬送方向と同じ方向に延伸して固定されている。本実施形態では、支軸51は、圧縮空気であるエアを供給するエア供給管でもある。
エアは、コンプレッサ等のエア供給源から、支軸51内のエア供給管の一端側へ供給される。本実施形態では、エア供給源としてエアブロア18が、コンベヤ本体フレーム21の下流端側の上部に設けられている。
【0042】
各エアチャンバ41は、そのエア貯留室42がフレキシブルなエア供給管としての例えばゴムホース44、44にて支軸51内のエア供給管と連通している。本実施形態では、2本のゴムホース44、44を用いているが、少なくも1本以上のゴムホース44で良い。
なお、各エアチャンバ41は、エア供給管ではない単独の支軸51を用いて回転可能に設けても良い。その場合、各エアチャンバ41は他のエア供給管にてエア貯留室42へエアを供給することになる。
【0043】
各エアチャンバ41は、その長手方向の一側縁からエアチャンバ41の半円のほぼ中心に向けて延びる複数の支持棒52、52にて片持ちで、前記支軸51に軸受53、53を介して回転可能に支持される。本実施形態では、2本の支持棒52、52にて片持ちで支持される。
したがって、各エアチャンバ41の長手方向の他側縁には支持棒52、52を設けないので、エアチャンバ41が支軸51を中心にして回転する際、エアチャンバ41の他側縁の側は搬送ベルト11にぶつからずに、搬送ベルト11の外周の下方位置へ回転することができる。あるいは、搬送ベルト11の下方位置から外れる上方の待避位置へ回転することができる。
【0044】
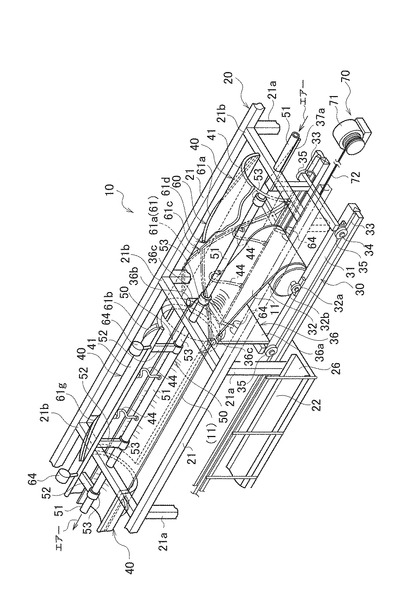
ベルト支持体回転装置60としては、図2、図6および図7に示すように、ガイドレール61と、突き当て部材37と、復帰用回転装置62とを備えている。
ガイドレール61は、各エアチャンバ41における半円筒の外周面のほぼ対角線上に突出して設けたものである。突き当て部材37は、ヘッドプーリ台車ユニット30が通過前に、ガイドレール61の下側へ突き当てて前記エアチャンバ41を原位置から待避位置へ回転させるものである。復帰用回転装置62は、ヘッドプーリ台車ユニット30が通過後に、エアチャンバ41を遮る方向へ回転して原位置へ戻すものである。
【0045】
更に詳しく説明する。突き当て部材37としては、ヘッドプーリ台車ユニット30が下流側へ前進時に使用する前進用突き当て部材37aと、ヘッドプーリ台車ユニット30が上流側へ後退時に使用する後退用突き当て部材37bと、を備えている。前進用突き当て部材37aは、ヘッドプーリ台車ユニット30の台車フレーム31の前方端側に設けており、下流方向へ向けて延伸した棒状の部材である。一方、後退用突き当て部材37bは、ヘッドプーリ台車ユニット30の台車フレーム31の後方端側に設けており、上流方向へ向けて延伸した棒状の部材である。
【0046】
ガイドレール61は、図2に示すように、ヘッドプーリ台車ユニット30が下流側へ前進時に、前進用突き当て部材37aにて突き当てられる前進用ガイドレール61aと、ヘッドプーリ台車ユニット30が上流側へ後退時に、後退用突き当て部材37bにて突き当てられる後退用ガイドレール61bと、を備えている。
更に詳しく説明する。前進用ガイドレール61aと後退用ガイドレール61bは、エアチャンバ41の半円筒の外周面のほぼ対角線上に交叉して設けている。 しかも、その交叉箇所では、前進用突き当て部材37aの先端が後退用ガイドレール61bに干渉しないための切欠き部61cを、後退用ガイドレール61bに対して設けている。 さらに、後退用突き当て部材37bの先端が前進用ガイドレール61aに干渉しないための切欠き部61dを、前進用ガイドレール61aに対して設けている。
【0047】
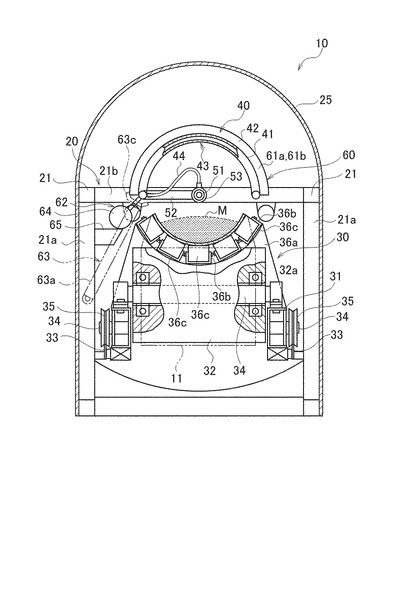
復帰用回転装置62は、図4および図5に示すように、待避位置にあるエアチャンバ41を図5において時計回り方向へ回転するために、そのエアチャンバ41の長手方向の一側縁を斜め上方向へ押し出すプッシャ63(押し出し装置)を備えている。つまり、プッシャ63は、待避位置にあるエアチャンバ41を原位置へ戻る方向へ押し出すものである。
プッシャ63としては、例えば、エアシリンダ63aのシリンダロッド63bの先端に押当て部63cを設ける。エアシリンダ63aの基部がコンベヤ本体フレーム21に回動可能に取り付けられ、前記押当て部63cが、開いた状態のエアチャンバ41の一側縁を図5において時計回り方向へ押し出す構成である。
【0048】
また、エアチャンバ41の前記一側縁には、エアチャンバ41を回転するための重り64を設けている。したがって、プッシャ63は、図4に示すように、エアチャンバ41と一緒に回転する重り64が頂点を通過する位置まで、前記エアチャンバ41を押し出す構成である。
重り64が頂点を通過すると、その重り64の重力によって、前記エアチャンバ41が図4において時計回り方向へ回転し、図3に示す原位置へ戻ることとなる。
なお、復帰用回転装置62は、上記のプッシャ63と重り64に限定されない。例えば、他の実施形態としては、突き当て部材37の先端と軸受53の外周にそれぞれ歯車または摩擦車を設け、それを電動機等で回転させることによりその機能を代替することも可能である。 またそうすることにより復帰方向に回転させるだけでなく、その逆の原位置から退避位置へ回転させることも出来る。
【0049】
(ウィンチユニット)
図6および図7に示すように、ウィンチユニット70は、ヘッドプーリ32を上流側または下流側へ牽引移動させるもので、スイッチ(図示は表示しない)のオン・オフによってヘッドプーリ32を所定位置に電動駆動させるユニットである。そのウィンチユニット70は、ワイヤーロープ72の一端を台車フレーム31のフック38に連結し、任意の方向(本実施形態では上流側または下流側)へ台車フレーム31およびヘッドプーリ32を移動させる電動ウィンチ本体71を備える。
【0050】
また、ウィンチユニット70は、搬送ベルト11の縮状態において、ヘッドプーリ32を限界位置に停止させるための最短リミットスイッチ(図示は表示しない)を備える。 さらに、搬送ベルト11の伸状態において、ヘッドプーリ32を限界位置に停止させるための最長リミットスイッチ(図示は表示しない)を備える。
前記最短リミットスイッチは、ヘッドプーリ32がベルトコンベヤ本体ユニット20における上流側の第一の搬送物受け口24aの位置で停止するように予め設定している。 一方、前記最長リミットスイッチは、ヘッドプーリ32がベルトコンベヤ本体ユニット20における下流側である最後のn番目の搬送物受け口24nの位置で停止するように予め設定している。これによって、最短リミットスイッチと最長リミットスイッチは、ヘッドプーリ32が移動可能な限界範囲として機能する。
【0051】
ここで、「搬送ベルト縮状態」とは、ヘッドプーリ32を上流側へ移動させた場合に、搬送ベルト11が弛んで余剰ベルトが生じることになる。この余剰ベルトを縮めた状態のことをいう。 一方、「搬送ベルト伸状態」とは、ヘッドプーリ32を下流側へ移動させた場合に、搬送ベルト11が伸びた状態のことをいう。
【0052】
なお、本実施形態におけるウィンチユニット70は、電動ウィンチ本体71とワイヤーロープ72によって牽引を実現しているが、動力源について限定されるものではない。 例えば、ギヤとチェーンを用いてヘッドプーリ32を牽引することもできるし、また、ウィンチユニット70の電動モータの代替として油圧モータ、空圧モータ、内燃機、人力、重力、バネ力等を利用することもできる。ただし、電動ウィンチ本体71とワイヤーロープ72の組み合わせは、省スペースおよび低コストで実現可能であるために好ましい。
【0053】
(ベルト貯めユニット)
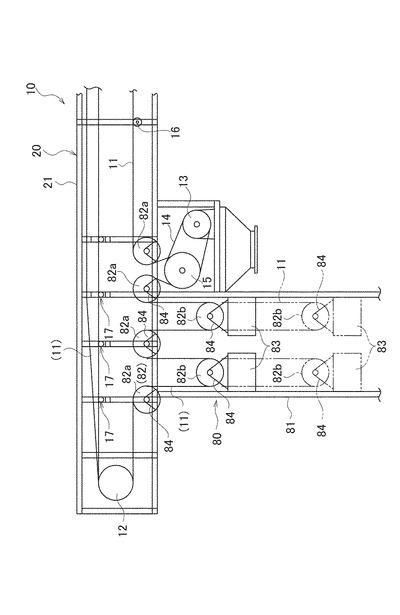
図9は、ベルト貯めユニット80の構成を示した部分拡大図である。ベルト貯めユニット80は、ヘッドプーリ32の移動によって弛んだ搬送ベルト11を貯めておくものである。すなわち、「搬送ベルト縮状態」における余剰ベルトを貯めておくための機能を有する。
例えば、ベルト貯めユニット80は、地面から立設され、ヘッドプーリ移動式ベルトコンベヤ10の全体を支持するベルト貯めユニット架構81と、搬送ベルト11の方向を必要に応じて変化させる複数のアイドルプーリ82と、搬送ベルト11を一定の張力に保つために上下動が可能なカウンターウェイト83(相対移動部材)と、を備えている。
【0054】
アイドルプーリ82は、ベルト貯めユニット架構81に設置された4つの固定型アイドルプーリ82a,・・・,82aと、それらの固定型アイドルプーリ82a,・・・,82aから伸びた搬送ベルト11を巻き回して支持する2つの可動型アイドルプーリ82b,82bと、からなる。2つの可動型アイドルプーリ82b,82bは、所定間隔離して対向配置するとともに、カウンターウェイト83の上面部に設置している。なお、搬送ベルト11は、2つの固定型アイドルプーリ82a,82aの間で駆動プーリ15に巻き回されている。
【0055】
上記の各アイドルプーリ82a、82bは、それぞれに巻き回された搬送ベルト11の伸び縮みを制御する。また、固定型アイドルプーリ82aは、固定部材84によってコンベヤ本体フレーム21の裏面に固定している。一方、移動型アイドルプーリ82aは、固定部材84によってカウンターウェイト83に固定している。そのカウンターウェイト83は、重力によって搬送ベルト11の張力を保持するとともに、起動時のショックを和らげる機能を備える。
【0056】
具体的な動作としては、ヘッドプーリ台車ユニット30が上流側へ移動すると、搬送ベルト11が弛み余剰ベルトが生じる。このとき、ヘッドプーリ台車ユニット30の移動距離に応じてカウンターウェイト83が重力によって下側(地面側)へ移動する。その結果、搬送ベルト11の弛みによって生じるはずの余剰ベルトは、可動型アイドルプーリ82bの下移動によって伸ばすことができる。つまり、ベルト貯めユニット架構81内で搬送ベルト11の張力を一定に保持し、かつ貯めておくことが可能となる。
【0057】
一方、ヘッドプーリ台車ユニット30が下流側へ移動したときは、その移動距離に追従してカウンターウェイト83が上移動する。このようにして搬送ベルト11のベルト張力を一定に保つのである。したがって、ヘッドプーリ台車ユニット30を前後に移動させて、搬送物Mの落下場所を変更した場合、余剰ベルトをベルト貯めユニット架構81内で格納するとともに、ベルト張力を一定に保持することができる。
【0058】
(エアサポート式ベルトコンベヤの動作)
次に、ヘッドプーリ台車ユニット30を上流側または下流側へ移動させるときのベルトコンベヤ10の動作について説明する。
ヘッドプーリ台車ユニット30は、搬送物投入口23と、その搬送物投入口23から最も遠い到達位置(これを「最長到達位置」とする)との間の任意位置で停止することができる。しかし、本実施形態では、図1に示すように、予め、複数の搬送物受け口24iを設けている。上記の最長到達位置は、n番目の搬送物受け口24nの位置となる。
図2および図8では、ヘッドプーリ32が、上流側から順に一番目の搬送物受け口24aとn番目の搬送物受け口24nとの中間に位置している場合を示している。つまり、任意のi番目の搬送物受け口24iの位置である。
【0059】
搬送物Mを搬送物投入口23から最長到達位置へ搬送させる場合には、搬送物投入口23から最も離れた位置にヘッドプーリ32が位置し、ヘッドプーリ32およびその回転軸はレール部材33,33の端部に位置することとなる。そして、全てのベルト支持装置40が搬送ベルト11を支持し、搬送ベルト収納機構80が収納する搬送ベルト11は、最も短くなる。
【0060】
搬送物投入口23から最も遠い到達位置よりは近い到達位置(これを「目的到達位置」とする)へ搬送させる場合には、ヘッドプーリ台車ユニット30が搬送物投入口23側へ、つまり上流側へ移動する。すると、最長到達位置と目的到達位置との間の搬送ベルト11が不要となって、搬送ベルト11が弛んだ状態となるので、搬送ベルト収納機構80が搬送ベルト11を収納し、所定のテンションを保つ。また、搬送物投入口23と目的到達位置との間に位置するベルト支持装置40が搬送ベルト11を支持する。
【0061】
一方、目的到達位置を最長到達位置の方向へ近づける場合には、ヘッドプーリ台車ユニット30が最長到達位置の側へ、つまり下流側へ移動する。すると、変更前の目的到達位置と変更後の目的到達位置との間の分だけ、搬送ベルト11が伸張するので、搬送ベルト収納機構80が搬送ベルト11を所定のテンションに保つように、収納していた搬送ベルト11を搬出する。また、変更前の目的到達位置と変更後の目的到達位置との間に位置するベルト支持装置40が、新たに搬送ベルト11を支持するために加えられる。
【0062】
ここで、ヘッドプーリ台車ユニット30が上流側または下流側へ移動する際に、ベルト支持装置40が搬送ベルト11を支持する動作を説明する。
まず、ベルト支持装置40における複数の各エアチャンバ41,41,・・・は、図1、図3および図8に示すように、通常、搬送ベルト11を下から支持する原位置にある。ただし、ヘッドプーリ台車ユニット30が位置するエアチャンバ41は、図2、図5および図8に示すようにヘッドプーリ台車ユニット30の邪魔にならない待避位置へ開いた状態にある。さらに、そのヘッドプーリ台車ユニット30の前後に隣り合うエアチャンバ41は、図2、図4および図8に示すように前進用突き当て部材37aおよび後退用突き当て部材37bによって半開きの状態、あるいは図5と同様に待避位置の全開の状態である。その詳しい動作は、後述する。
【0063】
搬送ベルト11のキャリア側は、テールプーリ12におけるフラット状態から変角ローラ17にて徐々に湾曲されてから、複数のエアチャンバ41の内周面に湾曲した状態で支持される。その下流端のエアチャンバ41からヘッドプーリ台車ユニット30におけるベルト支持ローラ部36のキャリアローラ36cを経てヘッドプーリ32に巻き回される。搬送ベルト11のリターン側は、ほぼフラットの状態で複数のリターンローラ16にて支持される。さらに、ベルト貯めユニット80の複数のアイドルプーリ82、すなわち固定型アイドルプーリ82aと可動型アイドルプーリ82b、並びに駆動モータ13にて駆動される駆動プーリ15を経てテールプーリ12に巻き回される。
【0064】
エアは、エアブロア18から支軸51内のエア供給管へ供給され、そのエア供給管からゴムホース44を介して各エアチャンバ41のエア貯留室42へ供給される。そのエア貯留室42のエアが複数のエア噴射孔43から噴射されるので、搬送ベルト11とエアチャンバ41との間にエア層が形成される。すなわち、搬送ベルト11がエアにて浮上した状態で各エアチャンバ41によって支持されながら下流側へ移動することになる。
【0065】
したがって、搬送ベルト11で搬送される搬送物Mは、従来のローラタイプのコンベヤやチェーンコンベヤに比べて、摩擦係数が小さくなるので、低騒音、省動力にて搬送される。また、コンベヤ本体フレーム21の全体は、トラフ25によってほぼ完全に密閉されているので、複数のエア噴射孔43から噴射されたエアは、トラフ25の上部に設けたエア浄化室(図示は表示しない)のエアフィルタを経て外気へ排出される。その結果、搬送物Mの荷こぼれや粉塵が舞い上がることを防止でき、衛生的である。
なお、エアフィルタを経て浄化されたエアは、再びエアブロア18へ循環するように構成することもできる。
【0066】
ヘッドプーリ台車ユニット30が下流側へ前進する場合は、その移動の際に、図8に示すように、待避機構50の一部を構成する前進用突き当て部材37aが下流側に隣り合うエアチャンバ41の前進用ガイドレール61aの側面へ突き当てて下流側へ前進する。その結果、その下流側のエアチャンバ41が図3の原位置の全閉の状態から反時計回り方向へ回転し、図4の半開きの状態へ移動する。この場合、プッシャ63は、図4の二点鎖線のように作動しておらず、縮んでいる状態である。
さらに、重り64がその回転の頂点を通過した時点で、その重り64によってエアチャンバ41が自動的に反時計回り方向へ回転し、図5に示すように前記重り64の回転はストッパ65にて停止する。エアチャンバ41は、ヘッドプーリ台車ユニット30の邪魔にならない待避位置の全開の状態となる。
【0067】
ヘッドプーリ台車ユニット30が下流側へさらに前進すると、前進用突き当て部材37aが、さらに下流側に隣り合うエアチャンバ41の前進用ガイドレール61aの側面へ突き当てて下流側へ前進するので、上述したのと同様に、そのエアチャンバ41が図3の原位置の全閉の状態から反時計回り方向へ回転する。
以上のように、ヘッドプーリ台車ユニット30の移動に伴って、予めエアチャンバ41がヘッドプーリ台車ユニット30の邪魔にならない待避位置へ回転することになる。
【0068】
また、ヘッドプーリ台車ユニット30が下流側へ前進する際に、後退用突き当て部材37bも下流側へ移動する。その後退用突き当て部材37bの先端が、上流側に隣り合うエアチャンバ41の位置から下流側へ外れた時に、制御装置によってプッシャ63を作動させ、待避位置にあるエアチャンバ41を図5において時計回り方向へ回転させる。重り64が回転の頂点を通過した時点で、その重り64によってエアチャンバ41が自動的に時計回り方向へ回転する。エアチャンバ41は、図3に示すように、搬送ベルト11の下方位置へ回り込み、原位置の全閉の状態で停止する。
【0069】
なお、上述した場合とは別の作動であってもよい。すなわち、後退用突き当て部材37bの先端が、上流側に隣り合うエアチャンバ41の中間より下流側へ移動した時に、プッシャ63を作動させてもよい。
この場合、エアチャンバ41は、重り64によって時計回り方向へ回転すると、後退用ガイドレール61bが後退用突き当て部材37bの先端へ当たってその回転が停止する。その後、後退用突き当て部材37bが下流側へ移動するに伴って、エアチャンバ41が原位置の全閉の状態へ回転することとなる。
【0070】
ヘッドプーリ台車ユニット30が上流側へ後退する場合は、基本的に、上述したヘッドプーリ台車ユニット30が下流側へ前進する場合と同様である。 すなわち、その移動の際に、図8に示すように、待避機構50の一部を構成する後退用突き当て部材37bが上流側に隣り合うエアチャンバ41の後退用ガイドレール61bの側面へ突き当てて上流側へ後退する。その結果、その上流側のエアチャンバ41が図3の原位置の全閉の状態から反時計回り方向へ回転し、図4の半開きの状態へ移動する。
さらに、重り64がその回転の頂点を通過した時点で、その重り64によってエアチャンバ41が自動的に反時計回り方向へ回転し、図5に示すように前記重り64の回転はストッパ65にて停止する。エアチャンバ41は、ヘッドプーリ台車ユニット30の邪魔にならない待避位置の全開の状態となる。
【0071】
ヘッドプーリ台車ユニット30が上流側へさらに後退すると、後退用突き当て部材37bが、さらに上流側に隣り合うエアチャンバ41の後退用ガイドレール61bの側面へ突き当てて上流側へ後退するので、上述したのと同様に、そのエアチャンバ41が図3の原位置の全閉の状態から反時計回り方向へ回転する。
【0072】
また、ヘッドプーリ台車ユニット30が上流側へ後退する際に、前進用突き当て部材37aも上流側へ移動する。その前進用突き当て部材37aの先端が、下流側に隣り合うエアチャンバ41の位置から上流側へ外れた時に、制御装置によってプッシャ63を作動させ、待避位置にあるエアチャンバ41を図5において時計回り方向へ回転させる。重り64が回転の頂点を通過した時点で、その重り64によってエアチャンバ41が自動的に時計回り方向へ回転する。エアチャンバ41は、図3に示すように、搬送ベルト11の下方位置へ回り込み、原位置の全閉の状態で停止する。
【0073】
なお、上述した場合とは別の作動であってもよい。すなわち、前進用突き当て部材37aの先端が、下流側に隣り合うエアチャンバ41の中間より上流側へ移動した時に、プッシャ63を作動させてもよい。
この場合、エアチャンバ41は、重り64によって時計回り方向へ回転すると、前進用ガイドレール61aが前進用突き当て部材37aの先端へ当たってその回転を停止する。その後、前進用突き当て部材37aが上流側へ移動するにつれて、エアチャンバ41が原位置の全閉の状態へ回転することとなる。
【0074】
以上のことから、ヘッドプーリ台車ユニット30を上流側および下流側へ移動させても、エアチャンバ41がヘッドプーリ台車ユニット30に対して邪魔にならないように待避するので、搬送ベルト11の長さを容易に変化することができる。しかも、ヘッドプーリ台車ユニット30に干渉しない位置のエアチャンバ41は、すべて原位置の全閉の状態へ戻るので、搬送ベルト11をエアチャンバ41から噴射するエアにてサポートすることができる。
【0075】
次に、ヘッドプーリ台車ユニット30を上流側または下流側へ移動させた場合の搬送物Mの積載状況について説明する。
最初にベルトコンベヤ10の電源スイッチを押すと、駆動モータ13が駆動プーリ15を駆動させて搬送ベルト11を回転させる。
次に、上流系統から輸送された搬送物Mが、搬送物投入口23の投入口から投入される。その搬送物Mは、搬送ベルト11にて搬送されていき、ヘッドプーリ32の位置で下方へ落下する。そのヘッドプーリ32が位置する搬送物受け口24iから搬送物貯留スペースへ落下する。
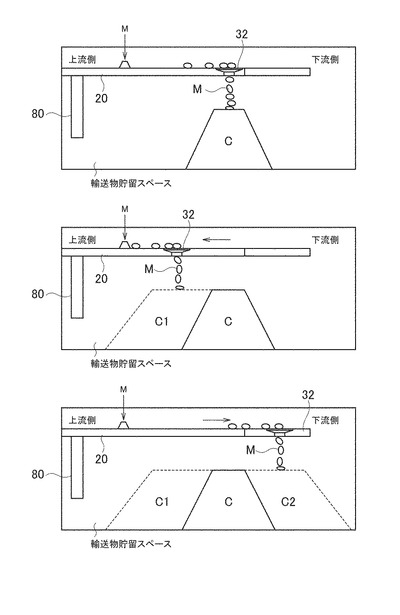
所定時間経過後、同じ箇所に搬送物Mが落下すると、搬送物貯留スペース内に山型に形成された搬送物Mが積載されていく〔図10(a)〕。
【0076】
次に、運転中であるとの条件のもと、制御装置を用いて下流側へ移動させるための操作命令を実行する。すると、電動ウィンチ本体71が下流側に牽引する動力をなし、ワイヤーロープ72に接続されたヘッドプーリ台車ユニット30(図10ではヘッドプーリ32を示す)が下流側へ移動する。ヘッドプーリ32は、山型の搬送物Mの下流側に設定された場所(斜面C1)まで移動して停止する。その場所で搬送物Mを搬送ベルト11から落下させることによって、搬送物貯留スペースへ搬送物Mを積載していく〔図10(b)〕。
【0077】
所定時間経過後、最初の積載物の山(C)と同じぐらいまで積載したら、反対側の斜面(斜面C2)にヘッドプーリ32を移動させる。これは、下流側へ移動させた場合と同様に、制御装置を用いて上流側へ移動させるための操作命令を実行する。電動ウィンチ本体71が上流側に牽引する動力をなし、ワイヤーロープ72に接続されたヘッドプーリ32が上流側へ移動する。ヘッドプーリ32は、山型の搬送物M(落ち山)の上流側に設定された場所(斜面C2)まで移動して停止する。その場所で搬送物Mを搬送ベルト11から落下させることによって、搬送物貯留スペースへ搬送物Mを積載していく。〔図10(c)〕
【0078】
以上のことから、一般的には、搬送物Mを同一箇所に積載し続けることによって、搬送物Mの山が生じてしまい、その山に隣接するスペースまでを十分に積載することが困難となる。しかし、本実施形態におけるベルトコンベヤ10によれば、ヘッドプーリ32を上流側または下流側に任意に移動可能であるので、搬送物M(落ち山)に隣接した空きスペースに新たな搬送物Mを積載することができる。搬送物貯留スペースに搬送物Mを連続的に隙間無く効率良く積載することができる。
【0079】
また、ヘッドプーリ32とカウンターウェイト83とを相対的に移動させたことによって、搬送ベルト11をベルト貯めユニット架構81内に保持しておくことができる。それによって搬送ベルト11の弛みや伸張を効果的に防止することができる。複数の搬送物受け口24を狭い間隔で配置することによって、ヘッドプーリ32の先端から搬送物Mを落下させる際に、落下点を自在に変位させることができる。
【0080】
なお、具体的な動作としては、搬送物Mによって形成された山の高さを判別し、その山の高さが予め設定された高さに達したと判別された場合に、ヘッドプーリ32を前後の一方に移動させる。これを繰り返していき、均一の高さに積載していく。
【0081】
以上のように、本発明の実施形態における搬送位置可変型のエアサポート式ベルトコンベヤ10の全体的な効果としては、搬送ベルト11は、エアにて浮上した状態で各エアチャンバ41,…41によって支持されながら下流側へ移動するので、従来のローラタイプのコンベヤやチェーンコンベヤに比べて、摩擦係数が小さくなる。そのため、搬送ベルト11で搬送される搬送物Mは、低騒音、省動力にて搬送される。また、ベルトコンベヤ10は、トラフ25にてほぼ完全に密閉できるので、衛生的である。
しかも、エアチャンバ41が、待避機構50によってヘッドプーリ台車ユニット30の移動の邪魔にならない位置へ待避するので、ヘッドプーリ台車ユニット30によってヘッドプーリ32を上流側または下流側へ移動させて、搬送ベルト11の長さを容易に変化することができる。つまり、搬送物Mは、輸送経路の所望の位置で落とすことができる。
【産業上の利用可能性】
【0082】
本発明は、コンベアの製造業、コンベアのメンテナンス業、コンベアを用いた運送業や海運業などにおいて、利用可能性を有する。
【符号の説明】
【0083】
10 ベルトコンベヤ 11 搬送ベルト
12 テールプーリ 13 駆動モータ
14 駆動チェーン 15 駆動プーリ
16 リターンローラ 17 変角ローラ
18 エアブロア
20 ベルトコンベヤ本体ユニット 21 コンベヤ本体フレーム(本体フレーム)
21a 縦部材 21b 横梁
22 手摺 23 搬送物投入口
24a,24b,・・・24n 搬送物受け口
25 トラフ 26 歩廊
30 ヘッドプーリ台車ユニット(ヘッドプーリ移動手段)
31 台車フレーム 32 ヘッドプーリ
32a ヘッドプーリ軸受 32b ヘッドプーリ軸
33 レール(レール部材) 34 車輪軸
35 車輪 36 ベルト支持ローラ部
36a キャリアスタンド 36b ローラ固定部材
36c キャリアローラ 37 突き当て部材
37a 前進用突き当て部材 37b 後退用突き当て部材
38 フック
40 ベルト支持装置(ベルト支持手段) 41 エアチャンバ(ベルト支持体)
42 エア貯留室 43 エア噴射孔
44 ゴムホース
50 待避機構 51 支軸
52 支持棒 53 軸受
60 ベルト支持体回転装置 61 ガイドレール
61a 前進用ガイドレール 61b 後退用ガイドレール
61c、61d 切欠き部 62 復帰用回転装置
63 プッシャ(押し出し装置) 63a エアシリンダ
63b シリンダロッド 63c 前記押当て部
64 重り 65 ストッパ
70 ウィンチユニット 71 電動ウィンチ本体
72 ワイヤーロープ
80 ベルト貯めユニット(搬送ベルト収納機構)
81 ベルト貯めユニット架構 82 アイドルプーリ
82a 固定型アイドルプーリ 82b 可動型アイドルプーリ
83 カウンターウェイト 84 固定部材
【技術分野】
【0001】
本発明は、搬送ベルトをエアにてサポートするエアサポート式ベルトコンベヤの技術に関する。 特に、ヘッドプーリの位置を自在に移動可能とすることによって搬送物を搬送経路の所望の位置へ運ぶことを可能としたサポートするエアサポート式ベルトコンベヤに関する。
【背景技術】
【0002】
一般に、鉱石や石炭等(「バラモノ」と称する)の搬送物を一定方向に連続的に運搬するベルトコンベヤの中間排出方式としては、トリッパー方式、スクレーパ方式、斜板方式がある。
トリッパー方式とは、ベルトの途中で搬送物を荷降しすることができるベルトコンベヤである。 スクレーパ方式は、走行しているベルト表面にゴムベルトまたは鋼板を押しつけて運搬物をせきとめ、ベルトの側方(片側)に荷降しするベルトコンベヤである。 斜板方式は、V型のスクレーパであり、搬送物をベルトの両側に荷降しするベルトコンベヤである。
さらに、ベルトコンベヤを中心として左右を貯炭場として使用するための配炭機を備えたベルトコンベヤがある。たとえば、トリッパーとシャトルコンベヤとを一体構造としたベルトコンベヤ本体移動式などが知られている。
【0003】
さて、搬送ベルトの動力としてエアを用いるエアサポート式ベルトコンベヤが、近年は注目を集めている。 代表的なエアサポート式ベルトコンベヤについて、図11を用いて説明する。
図11に示すエアサポート式ベルトコンベヤ100は、の紙面に対して垂直方向へ走行する無端環状の搬送ベルト101と、その搬送ベルト101を支持するベルト受け部材102と、を備える。 そのベルト受け部材102は、キャリア側ベルト受け部材102aとリターン側ベルト受け部材102bとからなる。 またキャリア側ベルト受け部材102aの下側には、エア供給源として例えばエアブロア108から供給されるエアを充填するプレナムチャンバ103が設けられている。
【0004】
前記の搬送ベルト101は、上部に位置するキャリア側搬送ベルト101にて搬送物Mを搬送した後に、下部に位置するリターン側搬送ベルト101となって回転する。
また、前記キャリア側ベルト受け部材102aおよびリターン側ベルト受け部材102bのそれぞれの表面には、プレナムチャンバ103に連通するエア吹出し孔104が設けられている。
更に、エア吹出し孔104から前記キャリア側ベルト受け部材102aと前記キャリア側搬送ベルト101との間へエアを供給してエア層を形成する。 エア吹出し孔104から前記リターン側ベルト受け部材102bと前記リターン側搬送ベルト101との間へエアを供給してエア層を形成する。
搬送ベルト101の全体は、トラフ105によってほぼ完全に密閉される。エアは、トラフ105に連通するエアフィルタ106を経て清浄なエアとなって、エアダクト107を通過して再びエアブロア108からプレナムチャンバ103へ供給されて循環する。
【0005】
以上のように、搬送ベルト101は、エア吹出し孔104から吹出されるエアによってサポートされるので、摩擦抵抗が少なく、大容量の搬送物Mが容易に搬送される。
このエアサポート式ベルトコンベヤに関連する技術として特許文献1を抽出した。
特許文献1に開示されているエアサポート式ベルトコンベヤは密閉構造なので、例えば鉱石や石炭等の搬送物において舞い上がる粉塵を封じ込めることができるため、衛生的である。この衛生面に関する特徴により、食品(たとえば穀物)などを搬送するベルトコンベヤとして有望視されている。
【0006】
さて、ベルトコンベヤに対しては、搬送物の落下場所(到達位置)を状況に応じて変更したいというニーズもある。
そのニーズに応える技術としては、たとえば特許文献2に開示された技術がある。 これは、搬送物の落下場所にヘッドプーリを移動させることが可能であるように、ヘッドプーリの移動によって余ったベルトを収納する構造を備えたベルトコンベヤに関する技術である。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平9−175618号公報
【特許文献2】特開2008−280161号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
前述した技術では、次のような問題が生じていた。
第一に、図11に示したトリッパー方式では、搬送物Mの落下させる位置の関係からベルトコンベヤの(特に上方の)設置スペースを大きくする必要がある。このため、ベルトコンベヤの設置場所が制限される場合や、ベルトコンベヤ設置場所の諸条件に合わせたオーダーメードが必要な場合が生じていた。オーダーメードの場合には、ベルトコンベヤの生産効率が悪く、コスト高になってしまう。
また、スクレーパ方式および斜板方式では、ベルト上にスクレーパを載置するため、任意の位置に荷降しすることが困難であり、かつ荷降しがトリッパーのように完全に排出することができない、という問題があった。
【0009】
特許文献1に示すようなエアサポート式ベルトコンベヤでは、搬送物をベルトコンベヤの搬送方向の途中で落とすことができない。
一方、搬送物をベルトコンベヤの搬送方向の途中で落とすには、特許文献2に開示されているような技術があるが、密閉構造ではないために、衛生面でのニーズを確保するために多大な労力を要していた。 チェーンコンベヤを採用する場合には、搬送物が変更されるたびに、搬送物がふれる部分(ケース内側、チェーン及びアタッチメントなど)全てを分解清掃や消毒する、という手間が掛かっていた。またチェーンに潤滑油を必要とする場合、その潤滑油が搬送物に付着するという問題は回避しがたい。
【0010】
本願発明が解決しようとする課題は、ヘッドプーリの位置を自在に移動可能とし、搬送経路の所望の位置へ搬送物を移動させることを可能とするエアサポート式ベルトコンベヤを提供することにある。
【課題を解決するための手段】
【0011】
(第一の発明)
本願における第一の発明は、 搬送物(M)を搬送物投入口(23)から下流側に位置する到達位置(たとえば搬送物受け口24a,24b,・・・)へ搬送させるとともに前記到達位置を変更可能なエアサポート式ベルトコンベヤ(10)に係る。
前記搬送物投入口(23)の近傍にて水平に固定された回転軸にて回転可能なテールプーリ(12)と、 水平な回転軸の位置を変更可能なヘッドプーリ(32)と、 そのヘッドプーリ(32)および前記テールプーリ(12)に掛け渡された搬送ベルト(11)と、 前記ヘッドプーリ(32)の回転軸を支持するとともにその回転軸の移動軌跡を形成するレール部材(33,33)と、 そのレール部材(33,33)に沿ってヘッドプーリ(32)およびその回転軸を移動させるためのヘッドプーリ移動手段(30)と、 そのヘッドプーリ移動手段(30)が移動することによって弛むまたは伸張する前記搬送ベルト(11)を収納または搬出させるとともにその搬送ベルト(11)を所定のテンションに保つ搬送ベルト収納機構(80)と、を備える。
また、前記搬送ベルト(11)によって搬送される搬送物(M)の重量と搬送ベルト(11)の重量および張力を支持するためのベルト支持手段(40)を搬送経路に沿って複数備える。
更に、ヘッドプーリ移動手段(30)の移動時において移動を妨げる位置に該当するベルト支持手段(40)は、内部にエア貯留室(42)を有する半円筒形状のベルト支持体(41)と、 そのベルト支持体(41)の半円筒形の内面と前記搬送ベルト(11)との間にエア層を形成すべく前記搬送ベルト(11)に向けて前記エア貯留室(42)のエアを噴射する複数のエア噴射孔(43,43,・・・)と、を備えるとともに、 ヘッドプーリ移動手段(30)が上流側あるいは下流側へ移動する際に邪魔にならない位置へベルト支持体(41)を待避させる待避機構(50)を備える。
【0012】
(作用)
搬送物(M)の到達位置(搬送物受け口24a,24b,・・・)を、所望の任意位置へ変更することが可能なエアサポート式ベルトコンベヤ(10)である。
まず、搬送物投入口(23)から最も遠い到達位置(「最長到達位置」とする)へ搬送させる場合には、搬送物投入口(23)から最も離れた位置にヘッドプーリ(32)が位置し、ヘッドプーリ(32)およびその回転軸はレール部材(33,33)の端部に位置することとなる。そして、全てのベルト支持手段(40)が搬送ベルト(11)を支持し、搬送ベルト収納機構(80)が収納する搬送ベルト(11)は、最も短くなる。
【0013】
搬送物投入口(23)から最も遠い到達位置よりは近い到達位置(「目的到達位置」とする)へ搬送させる場合には、ヘッドプーリ移動手段(30)が搬送物投入口(23)側へ、つまり上流側へ移動する。その移動の際に、待避機構(50)によって、移動方向直前のベルト支持手段(40)のベルト支持体(41)を待避位置に移動させ、ヘッドプーリ移動手段(30)の移動の際に邪魔にならない位置へ移動する。ヘッドプーリ移動手段(30)がヘッドプーリ(32)およびその回転軸を、レール部材(33,33)に沿って目的到達位置の近傍まで移動させる。
ヘッドプーリ移動手段(30)が通過後には、上記の待避位置に移動した当該ベルト支持手段(40)のベルト支持体(41)を待避機構(50)によって、搬送ベルト(11)を支持させることができる位置へ戻しておく。
最長到達位置と目的到達位置との間の搬送ベルト(11)が不要となって、搬送ベルト(11)が弛んだ状態となるので、搬送ベルト収納機構(80)が搬送ベルト(11)を収納し、所定のテンションを保つ。また、搬送物投入口(23)と目的到達位置との間に位置するベルト支持手段(40) が搬送ベルト(11)を支持する。
【0014】
目的到達位置を最長到達位置の方向へ近づける場合には、ヘッドプーリ移動手段(30)が下流側へ移動する。その移動の際に、待避機構(50)によって、移動方向直前のベルト支持手段(40)のベルト支持体(41)を待避位置に移動させ、ヘッドプーリ移動手段(30)の移動の際に邪魔にならない位置へ移動する。ヘッドプーリ移動手段(30)がヘッドプーリ(32)およびその回転軸を、レール部材(33,33)に沿って変更後の目的到達位置の近傍まで移動させる。
ヘッドプーリ移動手段(30)が通過後には、上記の待避位置に移動していた当該ベルト支持手段(40)のベルト支持体(41)を待避機構(50)によって、搬送ベルト(11)を支持させることができる位置へ戻しておく。それによって、変更前の目的到達位置と変更後の目的到達位置との間に位置するベルト支持手段(40)が、新たに搬送ベルト(11)を支持するために加えられる。
変更前の目的到達位置と変更後の目的到達位置との間の分だけ、搬送ベルト(11)が伸張するので、搬送ベルト収納機構(80)が搬送ベルト(11)を所定のテンションに保つように、収納していた搬送ベルト(11)を搬出する。
【0015】
搬送ベルト(11)は、複数のベルト支持体(41,41,・・・)によって支持され、エア貯留室(42)から複数のエア噴射孔(43,43,・・・)に対してエアが供給され、搬送ベルト(11)に向けて噴射するので、各ベルト支持体(41)の半円筒形の内面と搬送ベルト(11)との間にエア層が形成される。したがって、搬送ベルト(11)は、エアにて浮上した状態でベルト支持体(41)によって支持されながら下流側へ移動する。 このため、搬送ベルト(11)に載せられた搬送物(M)は、低騒音、省動力にて搬送される。 コンベア(10)の全体をほぼ完全に密閉することも可能である。
【0016】
(第一の発明のバリエーション1)
第一の発明は、以下のようなバリエーションを提供することもできる。
すなわち、 前記待避機構(50)は、前記搬送経路に沿って延伸した本体フレーム(21)と、その本体フレーム(21)に設けた支軸(51)を中心にして前記複数のベルト支持体(41,41,…)をその半円のほぼ中心位置で搬送方向を遮る方向と待避する方向へ回転するベルト支持体回転装置(60)と、を備えたエアサポート式ベルトコンベヤ(10)としてもよい。
【0017】
(作用)
複数の各ベルト支持体(41,41,…)は、それぞれ支軸(51)を中心にして各ベルト支持体(41,41,…)の半円のほぼ中心位置で回転するので、ヘッドプーリ移動手段(30)を上流側または下流側へ移動させる際に、ヘッドプーリ移動手段(30)の移動の邪魔にならない位置へ待避する。ヘッドプーリ移動手段(30)が通過した後は、ベルト支持体(41,41,…)にて搬送ベルト(11)を支持させることができる位置へ戻しておく。
【0018】
(第一の発明のバリエーション2)
第一の発明は、以下のようなバリエーションを提供することもできる。
すなわち、 前記支軸(51)は、前記搬送経路に沿って延伸させ、その支軸(51)がエアを供給するエア供給管としてもよい。
【0019】
(作用)
支軸(51)は、エアを供給するエア供給管とすることによって、エアを支軸(51)のエア供給管から各ベルト支持体(41,41,…)のエア貯留室(42,42,…)へ簡単に供給することになる。つまり、支軸(51)とは別途にエア供給管を設けると、そのエア供給管は各ベルト支持体(41,41,…)の回転時に邪魔になるが、支軸(51)がエア供給管を兼用することによって、各ベルト支持体(41,41,…)の回転動作が容易である。
【0020】
(第一の発明のバリエーション3)
第一の発明における前記バリエーション1または2は、以下のようなバリエーションを提供することもできる。
すなわち、 前記ベルト支持体回転装置(60)は、各ベルト支持体(41,41,…)における半円筒の外周面のほぼ対角線上に突出して設けたガイドレール(61)と、前記ヘッドプーリ移動手段(30)が通過前に前記ガイドレール(61)へ突き当てて前記ベルト支持体(41)を待避位置へ向けて回転するべくヘッドプーリ移動手段(30)に設けた突き当て部材(37)と、前記ヘッドプーリ移動手段(30)が通過後に前記ベルト支持体(41)を回転して搬送ベルト(11)を支持させることができる位置へ戻す復帰用回転装置(62)と、を備えたエアサポート式ベルトコンベヤ(10)としてもよい。
【0021】
(作用)
ガイドレール(61)が各ベルト支持体(41,41,…)における半円筒の外周面に半らせん状に設けられているので、ヘッドプーリ移動手段(30)が移動する際に、突き当て部材(37)が前記ガイドレール(61)へ突き当たることによって、ベルト支持体(41)が待避位置へ向けて回転する。ヘッドプーリ移動手段(30)が通過した後は、復帰用回転装置(62)によって前記ベルト支持体(41)が回転して搬送ベルト(11)を支持させることができる位置へ戻って再び搬送ベルト(11)を支持する。
【0022】
(第一の発明のバリエーション4)
第一の発明における前記バリエーション3は、以下のようなバリエーションを提供することもできる。
すなわち、 前記ガイドレール(61)は、各ベルト支持体(41,41,…)における半円筒の外周面の2つのほぼ対角線上に設けた前進用ガイドレール(61a)と後退用ガイドレール(61b)とで構成し、 前記突き当て部材(37)は、前記ヘッドプーリ移動手段(30)が下流側へ移動する時に前記前進用ガイドレール(61a)へ突き当てる前進用突き当て部材(37a)と、前記ヘッドプーリ移動手段(30)が上流側へ移動する時に前記後退用ガイドレール(61b)へ突き当てる後退用突き当て部材(37b)と、を備えたエアサポート式ベルトコンベヤ(10)としてもよい。
【0023】
(作用)
ヘッドプーリ移動手段(30)が下流側へ前進移動する時は、前進用突き当て部材(37a)がベルト支持体(41)における前進用ガイドレール(61a)へ突き当たることによってベルト支持体(41)が待避位置へ向けて回転する。ヘッドプーリ移動手段(30)が上流側へ後退移動する時は、後退用突き当て部材(37b)がベルト支持体(41)における後退用ガイドレール(61b)へ突き当たることによってベルト支持体(41)が待避位置へ向けて回転する。
前進用ガイドレール(61a)と後退用ガイドレール(61b)を、各ベルト支持体(41,41,…)における半円筒の外周面の2つのほぼ対角線上に設けたので、ヘッドプーリ移動手段(30)が下流側と上流側のいずれの方向へ向けて移動する場合であっても、ベルト支持体(41)が同じ方向で待避位置へ向けて回転する。
その結果、ベルト支持体(41)の一側縁を支持部材にて片持ちで支持して支軸(51)を中心に回転可能にすれば、そのベルト支持体(41)は前記支持部材が搬送ベルト(11)にぶつからない方向へ回転することができる。
【0024】
(第一の発明のバリエーション5)
第一の発明における前記バリエーション4は、以下のようなバリエーションを提供することもできる。
すなわち、 前記復帰用回転装置(62)は、待避位置のベルト支持体(41)に対して搬送ベルト(11)を支持させることができる位置へ戻す方向へ押し出すための押し出し装置(63)と、その押し出し装置(63)にて押し出す側のベルト支持体(41)の一側縁に設けた重り(64)と、を備える。
【0025】
(作用)
押し出し装置(63)によって、待避位置のベルト支持体(41)を搬送ベルト(11)を支持させることができる位置へ戻す方向へ押し出した時、重り(64)がその回転の頂点を通過すると、その重り(64)の重さによってベルト支持体(41)が自動的に回転して搬送ベルト(11)を支持させることができる位置へ戻る。
【発明の効果】
【0026】
第一の発明によれば、ヘッドプーリの位置を自在に移動可能とし、搬送経路の所望の位置へ搬送物を移動させることを可能とするエアサポート式ベルトコンベヤを提供することができた。
【図面の簡単な説明】
【0027】
【図1】本発明の実施形態に係るエアサポート式ベルトコンベヤの全体構成を示した側面図である。
【図2】図1のエアサポート式ベルトコンベヤにおけるヘッドプーリ付近を示した斜視図である。
【図3】図8における矢視III−III線の断面図である。
【図4】図8における矢視IV−IV線の断面図である。
【図5】図8における矢視V−V線の断面図である。
【図6】図1のエアサポート式ベルトコンベヤにおけるベルトコンベヤ本体ユニットの下流側先端部分を拡大した側面図である。
【図7】図6の平面図である。
【図8】図1のエアサポート式ベルトコンベヤにおけるベルトコンベヤ本体ユニットの中間部分を拡大した側面図である。
【図9】図1のエアサポート式ベルトコンベヤにおけるベルトコンベヤ本体ユニットの上流側のベルト貯めユニット付近を拡大した側面図である。
【図10】ヘッドプーリを上流側または下流側に移動させた場合の搬送物の積載状況を示す概略説明図である。
【図11】従来の実施形態に係るエアサポート式ベルトコンベヤの全体構成を正面から視た概略的な断面図である。
【発明を実施するための形態】
【0028】
本発明の実施形態について、図面を参照しながら説明する。ここで使用する図面は、図1から図9である。
【0029】
図1は、搬送位置可変型のエアサポート式ベルトコンベヤ10(以下、単に「ベルトコンベヤ」という)の全体構成を示した側面図である。
ベルトコンベヤ10は、搬送ベルト11をエアにてサポートするとともに、ヘッドプーリ32を上流側および下流側へ移動させることで、搬送ベルト11上に載置された搬送物Mを下流側の任意の位置へ自在に落下させることが可能である。なお、搬送物Mとしては、例えば、鉱石や石炭などの鉱物、大豆やトウモロコシや米や麦などの穀物、その他の種々の材料がある。
ベルトコンベヤ10は、ベルトコンベヤ本体ユニット20と、ヘッドプーリ32を台車で移動させるヘッドプーリ台車ユニット30(ヘッドプーリ移動手段)と、搬送経路に沿って複数備えたベルト支持装置40(ベルト支持手段)と、ウィンチユニット70と、ベルト貯めユニット80(搬送ベルト収納機構)と、を備えている。
【0030】
(ベルトコンベヤ本体ユニット)
図1、図2および図3に示すように、ベルトコンベヤ本体ユニット20は、コンベヤ本体フレーム21と、手摺22と、搬送物投入口23と、搬送物受け口24と、トラフ25とを備えている。
また、ベルトコンベヤ本体ユニット20は、その先端側にて上流側と下流側へ移動できるように配置されたヘッドプーリ32と、そのヘッドプーリ32の反対側の端部に位置するテールプーリ12と、前記ヘッドプーリ32とテールプーリ12を架け渡して配置された搬送ベルト11とを備える。
【0031】
さらに、駆動モータ13から駆動チェーン14を介して伝達した駆動力によって駆動する駆動プーリ15と、リターン側の搬送ベルト11を回転しながら支持するリターンローラ16を備えている。さらに、テールプーリ12からベルト支持装置40(ベルト支持手段)の最上流位置までの間で搬送ベルト11を徐々に搬送方向に対して垂直な断面において湾曲形状に変角するための変角ローラ17(図9を参照)を備えている。
【0032】
コンベヤ本体フレーム21は、床面から垂直に立設された縦部材21aと、その縦部材21aの反床面側に直交し、搬送ベルト11の搬送方向に沿って架け渡された横梁21bとによって略矩形状に形成される。
手摺22は、前記コンベヤ本体フレーム21を中心とした両側に配置されるとともに、移動式ベルトコンベヤ10のメンテナンス時に作業員が歩行可能な歩廊26および歩廊26の歩行時の安全性確保のために設置されたものである。
【0033】
搬送物投入口23は、上流側に位置して前記コンベヤ本体フレーム21の上部に設けており、搬送物Mを投入する。その搬送物投入口23には、開閉するための投入用ハッチ(図示は表示しない)を備えている。
搬送物受け口24は、下流側の適宜位置に配置して前記コンベヤ本体フレーム21の下部に設けており、前記搬送物投入口23から投入された搬送物Mが搬送ベルト11にて搬送されてから落下させる。その搬送物受け口24には、開閉するための排出用ハッチ(図示は表示しない)を備えている。
【0034】
本実施形態では、上流側から順に、(最短位置の)一番目の搬送物受け口24a、二番目の搬送物受け口24b、三番目の搬送物受け口24c、・・・・・・・・(最長位置の)n番目の搬送物受け口24nとする。任意位置のi番目は、搬送物受け口24iと称する。
トラフ25は、図3に示すように、前記コンベヤ本体フレーム21の全体をほぼ完全に密閉した状態で覆うものである。なお、図2ではトラフ25を図示省略している。
【0035】
(ヘッドプーリ台車ユニット30)
ヘッドプーリ台車ユニット30は、台車フレーム31の上に載置されたヘッドプーリ32を移動可能なユニットである。そのユニットは、搬送ベルト11の幅方向に所定間隔にて離して配置された二本のレール33,33(レール部材)と、車輪軸34の両端に設置され、各レール33,33に沿って移動可能に嵌め込まれた車輪35,35と、台車フレーム31上に載置されたヘッドプーリ32とを備える。
【0036】
ヘッドプーリ32は、図2に示すように、ヘッドプーリ軸受32aにヘッドプーリ軸32bが嵌合されて台車フレーム31の上端部に固定されている。台車フレーム31には、フック38が固定され、このフック38にヘッドプーリ32を搬送ベルト11の搬送方向に沿って前後に移動させるワイヤーロープ72が連結されている。このワイヤーロープ72は、ウィンチユニット70の駆動力によってヘッドプーリ32を前後に移動させる。
このヘッドプーリ32の移動範囲としては、図1に示した上流側から一番目の搬送物受け口24aを上流限界とし、n番目の搬送物受け口24nを下流限界とした範囲であり、この範囲内では自在に移動可能となっている。
【0037】
また、図2、図6および図7に示すように、台車フレーム31の上流端側には、湾曲した状態の搬送ベルト11を下側から支持するベルト支持ローラ部36が設けられている。搬送ベルト11は、詳しくは後述する半円筒形状のエアチャンバ41にて湾曲した状態で支持されて移動する。ベルト支持ローラ部36は、前記エアチャンバ41の下流端から外れた搬送ベルト11をほぼ同じ位置で下側から支持するものである。
ベルト支持ローラ部36は、台車フレーム31の下流側の上部に固定したキャリアスタンド36aと、そのキャリアスタンド36aの上部に湾曲形成した湾曲面に複数のローラ固定部材36bを介して設けた複数のキャリアローラ36cとを備える。本実施形態では、図3に示すように、5個のキャリアローラ36cを設けている。各キャリアローラ36cは、内部にベアリングを内蔵し、そのベアリングによって回転する。
その結果、エアチャンバ41にて支持される搬送ベルト11が、そのエアチャンバ41の下流端からヘッドプーリ32へ向けてスムーズに移動することになる。
【0038】
(ベルト支持装置)
ベルト支持装置40は、搬送ベルト11によって搬送される搬送物Mの重量と搬送ベルト11の重量および張力を支持するものである。なお、本実施形態では、複数のベルト支持装置40(ベルト支持手段)が搬送経路に沿って直列的に配置されている。
そのベルト支持装置40は、図4に示すように、内部にエア貯留室42を有する半円筒形状のベルト支持体であるエアチャンバ41と、そのエアチャンバ41の半円筒形の内面から搬送ベルト11に向けて前記エア貯留室42のエアを噴射する複数のエア噴射孔43と、を備えている。
本実施形態では、複数のエア噴射孔43は、エアチャンバ41の長手方向に垂直な断面において半円のほぼ中央位置に、当該エアチャンバ41の長手方向に向けて適宜間隔に設けている。
【0039】
各エアチャンバ41は、常時、搬送ベルト11を支持させることができる位置(本実施形態では「原位置」という)に位置する。その原位置は、ヘッドプーリ台車ユニット30の移動時において移動を妨げる位置となる。しかし、ヘッドプーリ台車ユニット30の通過に応じて各エアチャンバ41を回転することによって、ヘッドプーリ台車ユニット30の移動の邪魔にならない位置(本実施形態では、「待避位置」という)へ待避する待避機構50を備えている。
【0040】
待避機構50は、コンベヤ本体フレーム21に設けた支軸51を中心にして、前記複数のエアチャンバ41をその半円のほぼ中心位置で、搬送ベルト11の搬送方向を遮る方向と、その逆に待避する方向へ回転するベルト支持体回転装置60を備えて構成されている。
【0041】
支軸51は、コンベヤ本体フレーム21の上部に、そのコンベヤ本体フレーム21の幅方向のほぼ中央に位置して、前記搬送方向と同じ方向に延伸して固定されている。本実施形態では、支軸51は、圧縮空気であるエアを供給するエア供給管でもある。
エアは、コンプレッサ等のエア供給源から、支軸51内のエア供給管の一端側へ供給される。本実施形態では、エア供給源としてエアブロア18が、コンベヤ本体フレーム21の下流端側の上部に設けられている。
【0042】
各エアチャンバ41は、そのエア貯留室42がフレキシブルなエア供給管としての例えばゴムホース44、44にて支軸51内のエア供給管と連通している。本実施形態では、2本のゴムホース44、44を用いているが、少なくも1本以上のゴムホース44で良い。
なお、各エアチャンバ41は、エア供給管ではない単独の支軸51を用いて回転可能に設けても良い。その場合、各エアチャンバ41は他のエア供給管にてエア貯留室42へエアを供給することになる。
【0043】
各エアチャンバ41は、その長手方向の一側縁からエアチャンバ41の半円のほぼ中心に向けて延びる複数の支持棒52、52にて片持ちで、前記支軸51に軸受53、53を介して回転可能に支持される。本実施形態では、2本の支持棒52、52にて片持ちで支持される。
したがって、各エアチャンバ41の長手方向の他側縁には支持棒52、52を設けないので、エアチャンバ41が支軸51を中心にして回転する際、エアチャンバ41の他側縁の側は搬送ベルト11にぶつからずに、搬送ベルト11の外周の下方位置へ回転することができる。あるいは、搬送ベルト11の下方位置から外れる上方の待避位置へ回転することができる。
【0044】
ベルト支持体回転装置60としては、図2、図6および図7に示すように、ガイドレール61と、突き当て部材37と、復帰用回転装置62とを備えている。
ガイドレール61は、各エアチャンバ41における半円筒の外周面のほぼ対角線上に突出して設けたものである。突き当て部材37は、ヘッドプーリ台車ユニット30が通過前に、ガイドレール61の下側へ突き当てて前記エアチャンバ41を原位置から待避位置へ回転させるものである。復帰用回転装置62は、ヘッドプーリ台車ユニット30が通過後に、エアチャンバ41を遮る方向へ回転して原位置へ戻すものである。
【0045】
更に詳しく説明する。突き当て部材37としては、ヘッドプーリ台車ユニット30が下流側へ前進時に使用する前進用突き当て部材37aと、ヘッドプーリ台車ユニット30が上流側へ後退時に使用する後退用突き当て部材37bと、を備えている。前進用突き当て部材37aは、ヘッドプーリ台車ユニット30の台車フレーム31の前方端側に設けており、下流方向へ向けて延伸した棒状の部材である。一方、後退用突き当て部材37bは、ヘッドプーリ台車ユニット30の台車フレーム31の後方端側に設けており、上流方向へ向けて延伸した棒状の部材である。
【0046】
ガイドレール61は、図2に示すように、ヘッドプーリ台車ユニット30が下流側へ前進時に、前進用突き当て部材37aにて突き当てられる前進用ガイドレール61aと、ヘッドプーリ台車ユニット30が上流側へ後退時に、後退用突き当て部材37bにて突き当てられる後退用ガイドレール61bと、を備えている。
更に詳しく説明する。前進用ガイドレール61aと後退用ガイドレール61bは、エアチャンバ41の半円筒の外周面のほぼ対角線上に交叉して設けている。 しかも、その交叉箇所では、前進用突き当て部材37aの先端が後退用ガイドレール61bに干渉しないための切欠き部61cを、後退用ガイドレール61bに対して設けている。 さらに、後退用突き当て部材37bの先端が前進用ガイドレール61aに干渉しないための切欠き部61dを、前進用ガイドレール61aに対して設けている。
【0047】
復帰用回転装置62は、図4および図5に示すように、待避位置にあるエアチャンバ41を図5において時計回り方向へ回転するために、そのエアチャンバ41の長手方向の一側縁を斜め上方向へ押し出すプッシャ63(押し出し装置)を備えている。つまり、プッシャ63は、待避位置にあるエアチャンバ41を原位置へ戻る方向へ押し出すものである。
プッシャ63としては、例えば、エアシリンダ63aのシリンダロッド63bの先端に押当て部63cを設ける。エアシリンダ63aの基部がコンベヤ本体フレーム21に回動可能に取り付けられ、前記押当て部63cが、開いた状態のエアチャンバ41の一側縁を図5において時計回り方向へ押し出す構成である。
【0048】
また、エアチャンバ41の前記一側縁には、エアチャンバ41を回転するための重り64を設けている。したがって、プッシャ63は、図4に示すように、エアチャンバ41と一緒に回転する重り64が頂点を通過する位置まで、前記エアチャンバ41を押し出す構成である。
重り64が頂点を通過すると、その重り64の重力によって、前記エアチャンバ41が図4において時計回り方向へ回転し、図3に示す原位置へ戻ることとなる。
なお、復帰用回転装置62は、上記のプッシャ63と重り64に限定されない。例えば、他の実施形態としては、突き当て部材37の先端と軸受53の外周にそれぞれ歯車または摩擦車を設け、それを電動機等で回転させることによりその機能を代替することも可能である。 またそうすることにより復帰方向に回転させるだけでなく、その逆の原位置から退避位置へ回転させることも出来る。
【0049】
(ウィンチユニット)
図6および図7に示すように、ウィンチユニット70は、ヘッドプーリ32を上流側または下流側へ牽引移動させるもので、スイッチ(図示は表示しない)のオン・オフによってヘッドプーリ32を所定位置に電動駆動させるユニットである。そのウィンチユニット70は、ワイヤーロープ72の一端を台車フレーム31のフック38に連結し、任意の方向(本実施形態では上流側または下流側)へ台車フレーム31およびヘッドプーリ32を移動させる電動ウィンチ本体71を備える。
【0050】
また、ウィンチユニット70は、搬送ベルト11の縮状態において、ヘッドプーリ32を限界位置に停止させるための最短リミットスイッチ(図示は表示しない)を備える。 さらに、搬送ベルト11の伸状態において、ヘッドプーリ32を限界位置に停止させるための最長リミットスイッチ(図示は表示しない)を備える。
前記最短リミットスイッチは、ヘッドプーリ32がベルトコンベヤ本体ユニット20における上流側の第一の搬送物受け口24aの位置で停止するように予め設定している。 一方、前記最長リミットスイッチは、ヘッドプーリ32がベルトコンベヤ本体ユニット20における下流側である最後のn番目の搬送物受け口24nの位置で停止するように予め設定している。これによって、最短リミットスイッチと最長リミットスイッチは、ヘッドプーリ32が移動可能な限界範囲として機能する。
【0051】
ここで、「搬送ベルト縮状態」とは、ヘッドプーリ32を上流側へ移動させた場合に、搬送ベルト11が弛んで余剰ベルトが生じることになる。この余剰ベルトを縮めた状態のことをいう。 一方、「搬送ベルト伸状態」とは、ヘッドプーリ32を下流側へ移動させた場合に、搬送ベルト11が伸びた状態のことをいう。
【0052】
なお、本実施形態におけるウィンチユニット70は、電動ウィンチ本体71とワイヤーロープ72によって牽引を実現しているが、動力源について限定されるものではない。 例えば、ギヤとチェーンを用いてヘッドプーリ32を牽引することもできるし、また、ウィンチユニット70の電動モータの代替として油圧モータ、空圧モータ、内燃機、人力、重力、バネ力等を利用することもできる。ただし、電動ウィンチ本体71とワイヤーロープ72の組み合わせは、省スペースおよび低コストで実現可能であるために好ましい。
【0053】
(ベルト貯めユニット)
図9は、ベルト貯めユニット80の構成を示した部分拡大図である。ベルト貯めユニット80は、ヘッドプーリ32の移動によって弛んだ搬送ベルト11を貯めておくものである。すなわち、「搬送ベルト縮状態」における余剰ベルトを貯めておくための機能を有する。
例えば、ベルト貯めユニット80は、地面から立設され、ヘッドプーリ移動式ベルトコンベヤ10の全体を支持するベルト貯めユニット架構81と、搬送ベルト11の方向を必要に応じて変化させる複数のアイドルプーリ82と、搬送ベルト11を一定の張力に保つために上下動が可能なカウンターウェイト83(相対移動部材)と、を備えている。
【0054】
アイドルプーリ82は、ベルト貯めユニット架構81に設置された4つの固定型アイドルプーリ82a,・・・,82aと、それらの固定型アイドルプーリ82a,・・・,82aから伸びた搬送ベルト11を巻き回して支持する2つの可動型アイドルプーリ82b,82bと、からなる。2つの可動型アイドルプーリ82b,82bは、所定間隔離して対向配置するとともに、カウンターウェイト83の上面部に設置している。なお、搬送ベルト11は、2つの固定型アイドルプーリ82a,82aの間で駆動プーリ15に巻き回されている。
【0055】
上記の各アイドルプーリ82a、82bは、それぞれに巻き回された搬送ベルト11の伸び縮みを制御する。また、固定型アイドルプーリ82aは、固定部材84によってコンベヤ本体フレーム21の裏面に固定している。一方、移動型アイドルプーリ82aは、固定部材84によってカウンターウェイト83に固定している。そのカウンターウェイト83は、重力によって搬送ベルト11の張力を保持するとともに、起動時のショックを和らげる機能を備える。
【0056】
具体的な動作としては、ヘッドプーリ台車ユニット30が上流側へ移動すると、搬送ベルト11が弛み余剰ベルトが生じる。このとき、ヘッドプーリ台車ユニット30の移動距離に応じてカウンターウェイト83が重力によって下側(地面側)へ移動する。その結果、搬送ベルト11の弛みによって生じるはずの余剰ベルトは、可動型アイドルプーリ82bの下移動によって伸ばすことができる。つまり、ベルト貯めユニット架構81内で搬送ベルト11の張力を一定に保持し、かつ貯めておくことが可能となる。
【0057】
一方、ヘッドプーリ台車ユニット30が下流側へ移動したときは、その移動距離に追従してカウンターウェイト83が上移動する。このようにして搬送ベルト11のベルト張力を一定に保つのである。したがって、ヘッドプーリ台車ユニット30を前後に移動させて、搬送物Mの落下場所を変更した場合、余剰ベルトをベルト貯めユニット架構81内で格納するとともに、ベルト張力を一定に保持することができる。
【0058】
(エアサポート式ベルトコンベヤの動作)
次に、ヘッドプーリ台車ユニット30を上流側または下流側へ移動させるときのベルトコンベヤ10の動作について説明する。
ヘッドプーリ台車ユニット30は、搬送物投入口23と、その搬送物投入口23から最も遠い到達位置(これを「最長到達位置」とする)との間の任意位置で停止することができる。しかし、本実施形態では、図1に示すように、予め、複数の搬送物受け口24iを設けている。上記の最長到達位置は、n番目の搬送物受け口24nの位置となる。
図2および図8では、ヘッドプーリ32が、上流側から順に一番目の搬送物受け口24aとn番目の搬送物受け口24nとの中間に位置している場合を示している。つまり、任意のi番目の搬送物受け口24iの位置である。
【0059】
搬送物Mを搬送物投入口23から最長到達位置へ搬送させる場合には、搬送物投入口23から最も離れた位置にヘッドプーリ32が位置し、ヘッドプーリ32およびその回転軸はレール部材33,33の端部に位置することとなる。そして、全てのベルト支持装置40が搬送ベルト11を支持し、搬送ベルト収納機構80が収納する搬送ベルト11は、最も短くなる。
【0060】
搬送物投入口23から最も遠い到達位置よりは近い到達位置(これを「目的到達位置」とする)へ搬送させる場合には、ヘッドプーリ台車ユニット30が搬送物投入口23側へ、つまり上流側へ移動する。すると、最長到達位置と目的到達位置との間の搬送ベルト11が不要となって、搬送ベルト11が弛んだ状態となるので、搬送ベルト収納機構80が搬送ベルト11を収納し、所定のテンションを保つ。また、搬送物投入口23と目的到達位置との間に位置するベルト支持装置40が搬送ベルト11を支持する。
【0061】
一方、目的到達位置を最長到達位置の方向へ近づける場合には、ヘッドプーリ台車ユニット30が最長到達位置の側へ、つまり下流側へ移動する。すると、変更前の目的到達位置と変更後の目的到達位置との間の分だけ、搬送ベルト11が伸張するので、搬送ベルト収納機構80が搬送ベルト11を所定のテンションに保つように、収納していた搬送ベルト11を搬出する。また、変更前の目的到達位置と変更後の目的到達位置との間に位置するベルト支持装置40が、新たに搬送ベルト11を支持するために加えられる。
【0062】
ここで、ヘッドプーリ台車ユニット30が上流側または下流側へ移動する際に、ベルト支持装置40が搬送ベルト11を支持する動作を説明する。
まず、ベルト支持装置40における複数の各エアチャンバ41,41,・・・は、図1、図3および図8に示すように、通常、搬送ベルト11を下から支持する原位置にある。ただし、ヘッドプーリ台車ユニット30が位置するエアチャンバ41は、図2、図5および図8に示すようにヘッドプーリ台車ユニット30の邪魔にならない待避位置へ開いた状態にある。さらに、そのヘッドプーリ台車ユニット30の前後に隣り合うエアチャンバ41は、図2、図4および図8に示すように前進用突き当て部材37aおよび後退用突き当て部材37bによって半開きの状態、あるいは図5と同様に待避位置の全開の状態である。その詳しい動作は、後述する。
【0063】
搬送ベルト11のキャリア側は、テールプーリ12におけるフラット状態から変角ローラ17にて徐々に湾曲されてから、複数のエアチャンバ41の内周面に湾曲した状態で支持される。その下流端のエアチャンバ41からヘッドプーリ台車ユニット30におけるベルト支持ローラ部36のキャリアローラ36cを経てヘッドプーリ32に巻き回される。搬送ベルト11のリターン側は、ほぼフラットの状態で複数のリターンローラ16にて支持される。さらに、ベルト貯めユニット80の複数のアイドルプーリ82、すなわち固定型アイドルプーリ82aと可動型アイドルプーリ82b、並びに駆動モータ13にて駆動される駆動プーリ15を経てテールプーリ12に巻き回される。
【0064】
エアは、エアブロア18から支軸51内のエア供給管へ供給され、そのエア供給管からゴムホース44を介して各エアチャンバ41のエア貯留室42へ供給される。そのエア貯留室42のエアが複数のエア噴射孔43から噴射されるので、搬送ベルト11とエアチャンバ41との間にエア層が形成される。すなわち、搬送ベルト11がエアにて浮上した状態で各エアチャンバ41によって支持されながら下流側へ移動することになる。
【0065】
したがって、搬送ベルト11で搬送される搬送物Mは、従来のローラタイプのコンベヤやチェーンコンベヤに比べて、摩擦係数が小さくなるので、低騒音、省動力にて搬送される。また、コンベヤ本体フレーム21の全体は、トラフ25によってほぼ完全に密閉されているので、複数のエア噴射孔43から噴射されたエアは、トラフ25の上部に設けたエア浄化室(図示は表示しない)のエアフィルタを経て外気へ排出される。その結果、搬送物Mの荷こぼれや粉塵が舞い上がることを防止でき、衛生的である。
なお、エアフィルタを経て浄化されたエアは、再びエアブロア18へ循環するように構成することもできる。
【0066】
ヘッドプーリ台車ユニット30が下流側へ前進する場合は、その移動の際に、図8に示すように、待避機構50の一部を構成する前進用突き当て部材37aが下流側に隣り合うエアチャンバ41の前進用ガイドレール61aの側面へ突き当てて下流側へ前進する。その結果、その下流側のエアチャンバ41が図3の原位置の全閉の状態から反時計回り方向へ回転し、図4の半開きの状態へ移動する。この場合、プッシャ63は、図4の二点鎖線のように作動しておらず、縮んでいる状態である。
さらに、重り64がその回転の頂点を通過した時点で、その重り64によってエアチャンバ41が自動的に反時計回り方向へ回転し、図5に示すように前記重り64の回転はストッパ65にて停止する。エアチャンバ41は、ヘッドプーリ台車ユニット30の邪魔にならない待避位置の全開の状態となる。
【0067】
ヘッドプーリ台車ユニット30が下流側へさらに前進すると、前進用突き当て部材37aが、さらに下流側に隣り合うエアチャンバ41の前進用ガイドレール61aの側面へ突き当てて下流側へ前進するので、上述したのと同様に、そのエアチャンバ41が図3の原位置の全閉の状態から反時計回り方向へ回転する。
以上のように、ヘッドプーリ台車ユニット30の移動に伴って、予めエアチャンバ41がヘッドプーリ台車ユニット30の邪魔にならない待避位置へ回転することになる。
【0068】
また、ヘッドプーリ台車ユニット30が下流側へ前進する際に、後退用突き当て部材37bも下流側へ移動する。その後退用突き当て部材37bの先端が、上流側に隣り合うエアチャンバ41の位置から下流側へ外れた時に、制御装置によってプッシャ63を作動させ、待避位置にあるエアチャンバ41を図5において時計回り方向へ回転させる。重り64が回転の頂点を通過した時点で、その重り64によってエアチャンバ41が自動的に時計回り方向へ回転する。エアチャンバ41は、図3に示すように、搬送ベルト11の下方位置へ回り込み、原位置の全閉の状態で停止する。
【0069】
なお、上述した場合とは別の作動であってもよい。すなわち、後退用突き当て部材37bの先端が、上流側に隣り合うエアチャンバ41の中間より下流側へ移動した時に、プッシャ63を作動させてもよい。
この場合、エアチャンバ41は、重り64によって時計回り方向へ回転すると、後退用ガイドレール61bが後退用突き当て部材37bの先端へ当たってその回転が停止する。その後、後退用突き当て部材37bが下流側へ移動するに伴って、エアチャンバ41が原位置の全閉の状態へ回転することとなる。
【0070】
ヘッドプーリ台車ユニット30が上流側へ後退する場合は、基本的に、上述したヘッドプーリ台車ユニット30が下流側へ前進する場合と同様である。 すなわち、その移動の際に、図8に示すように、待避機構50の一部を構成する後退用突き当て部材37bが上流側に隣り合うエアチャンバ41の後退用ガイドレール61bの側面へ突き当てて上流側へ後退する。その結果、その上流側のエアチャンバ41が図3の原位置の全閉の状態から反時計回り方向へ回転し、図4の半開きの状態へ移動する。
さらに、重り64がその回転の頂点を通過した時点で、その重り64によってエアチャンバ41が自動的に反時計回り方向へ回転し、図5に示すように前記重り64の回転はストッパ65にて停止する。エアチャンバ41は、ヘッドプーリ台車ユニット30の邪魔にならない待避位置の全開の状態となる。
【0071】
ヘッドプーリ台車ユニット30が上流側へさらに後退すると、後退用突き当て部材37bが、さらに上流側に隣り合うエアチャンバ41の後退用ガイドレール61bの側面へ突き当てて上流側へ後退するので、上述したのと同様に、そのエアチャンバ41が図3の原位置の全閉の状態から反時計回り方向へ回転する。
【0072】
また、ヘッドプーリ台車ユニット30が上流側へ後退する際に、前進用突き当て部材37aも上流側へ移動する。その前進用突き当て部材37aの先端が、下流側に隣り合うエアチャンバ41の位置から上流側へ外れた時に、制御装置によってプッシャ63を作動させ、待避位置にあるエアチャンバ41を図5において時計回り方向へ回転させる。重り64が回転の頂点を通過した時点で、その重り64によってエアチャンバ41が自動的に時計回り方向へ回転する。エアチャンバ41は、図3に示すように、搬送ベルト11の下方位置へ回り込み、原位置の全閉の状態で停止する。
【0073】
なお、上述した場合とは別の作動であってもよい。すなわち、前進用突き当て部材37aの先端が、下流側に隣り合うエアチャンバ41の中間より上流側へ移動した時に、プッシャ63を作動させてもよい。
この場合、エアチャンバ41は、重り64によって時計回り方向へ回転すると、前進用ガイドレール61aが前進用突き当て部材37aの先端へ当たってその回転を停止する。その後、前進用突き当て部材37aが上流側へ移動するにつれて、エアチャンバ41が原位置の全閉の状態へ回転することとなる。
【0074】
以上のことから、ヘッドプーリ台車ユニット30を上流側および下流側へ移動させても、エアチャンバ41がヘッドプーリ台車ユニット30に対して邪魔にならないように待避するので、搬送ベルト11の長さを容易に変化することができる。しかも、ヘッドプーリ台車ユニット30に干渉しない位置のエアチャンバ41は、すべて原位置の全閉の状態へ戻るので、搬送ベルト11をエアチャンバ41から噴射するエアにてサポートすることができる。
【0075】
次に、ヘッドプーリ台車ユニット30を上流側または下流側へ移動させた場合の搬送物Mの積載状況について説明する。
最初にベルトコンベヤ10の電源スイッチを押すと、駆動モータ13が駆動プーリ15を駆動させて搬送ベルト11を回転させる。
次に、上流系統から輸送された搬送物Mが、搬送物投入口23の投入口から投入される。その搬送物Mは、搬送ベルト11にて搬送されていき、ヘッドプーリ32の位置で下方へ落下する。そのヘッドプーリ32が位置する搬送物受け口24iから搬送物貯留スペースへ落下する。
所定時間経過後、同じ箇所に搬送物Mが落下すると、搬送物貯留スペース内に山型に形成された搬送物Mが積載されていく〔図10(a)〕。
【0076】
次に、運転中であるとの条件のもと、制御装置を用いて下流側へ移動させるための操作命令を実行する。すると、電動ウィンチ本体71が下流側に牽引する動力をなし、ワイヤーロープ72に接続されたヘッドプーリ台車ユニット30(図10ではヘッドプーリ32を示す)が下流側へ移動する。ヘッドプーリ32は、山型の搬送物Mの下流側に設定された場所(斜面C1)まで移動して停止する。その場所で搬送物Mを搬送ベルト11から落下させることによって、搬送物貯留スペースへ搬送物Mを積載していく〔図10(b)〕。
【0077】
所定時間経過後、最初の積載物の山(C)と同じぐらいまで積載したら、反対側の斜面(斜面C2)にヘッドプーリ32を移動させる。これは、下流側へ移動させた場合と同様に、制御装置を用いて上流側へ移動させるための操作命令を実行する。電動ウィンチ本体71が上流側に牽引する動力をなし、ワイヤーロープ72に接続されたヘッドプーリ32が上流側へ移動する。ヘッドプーリ32は、山型の搬送物M(落ち山)の上流側に設定された場所(斜面C2)まで移動して停止する。その場所で搬送物Mを搬送ベルト11から落下させることによって、搬送物貯留スペースへ搬送物Mを積載していく。〔図10(c)〕
【0078】
以上のことから、一般的には、搬送物Mを同一箇所に積載し続けることによって、搬送物Mの山が生じてしまい、その山に隣接するスペースまでを十分に積載することが困難となる。しかし、本実施形態におけるベルトコンベヤ10によれば、ヘッドプーリ32を上流側または下流側に任意に移動可能であるので、搬送物M(落ち山)に隣接した空きスペースに新たな搬送物Mを積載することができる。搬送物貯留スペースに搬送物Mを連続的に隙間無く効率良く積載することができる。
【0079】
また、ヘッドプーリ32とカウンターウェイト83とを相対的に移動させたことによって、搬送ベルト11をベルト貯めユニット架構81内に保持しておくことができる。それによって搬送ベルト11の弛みや伸張を効果的に防止することができる。複数の搬送物受け口24を狭い間隔で配置することによって、ヘッドプーリ32の先端から搬送物Mを落下させる際に、落下点を自在に変位させることができる。
【0080】
なお、具体的な動作としては、搬送物Mによって形成された山の高さを判別し、その山の高さが予め設定された高さに達したと判別された場合に、ヘッドプーリ32を前後の一方に移動させる。これを繰り返していき、均一の高さに積載していく。
【0081】
以上のように、本発明の実施形態における搬送位置可変型のエアサポート式ベルトコンベヤ10の全体的な効果としては、搬送ベルト11は、エアにて浮上した状態で各エアチャンバ41,…41によって支持されながら下流側へ移動するので、従来のローラタイプのコンベヤやチェーンコンベヤに比べて、摩擦係数が小さくなる。そのため、搬送ベルト11で搬送される搬送物Mは、低騒音、省動力にて搬送される。また、ベルトコンベヤ10は、トラフ25にてほぼ完全に密閉できるので、衛生的である。
しかも、エアチャンバ41が、待避機構50によってヘッドプーリ台車ユニット30の移動の邪魔にならない位置へ待避するので、ヘッドプーリ台車ユニット30によってヘッドプーリ32を上流側または下流側へ移動させて、搬送ベルト11の長さを容易に変化することができる。つまり、搬送物Mは、輸送経路の所望の位置で落とすことができる。
【産業上の利用可能性】
【0082】
本発明は、コンベアの製造業、コンベアのメンテナンス業、コンベアを用いた運送業や海運業などにおいて、利用可能性を有する。
【符号の説明】
【0083】
10 ベルトコンベヤ 11 搬送ベルト
12 テールプーリ 13 駆動モータ
14 駆動チェーン 15 駆動プーリ
16 リターンローラ 17 変角ローラ
18 エアブロア
20 ベルトコンベヤ本体ユニット 21 コンベヤ本体フレーム(本体フレーム)
21a 縦部材 21b 横梁
22 手摺 23 搬送物投入口
24a,24b,・・・24n 搬送物受け口
25 トラフ 26 歩廊
30 ヘッドプーリ台車ユニット(ヘッドプーリ移動手段)
31 台車フレーム 32 ヘッドプーリ
32a ヘッドプーリ軸受 32b ヘッドプーリ軸
33 レール(レール部材) 34 車輪軸
35 車輪 36 ベルト支持ローラ部
36a キャリアスタンド 36b ローラ固定部材
36c キャリアローラ 37 突き当て部材
37a 前進用突き当て部材 37b 後退用突き当て部材
38 フック
40 ベルト支持装置(ベルト支持手段) 41 エアチャンバ(ベルト支持体)
42 エア貯留室 43 エア噴射孔
44 ゴムホース
50 待避機構 51 支軸
52 支持棒 53 軸受
60 ベルト支持体回転装置 61 ガイドレール
61a 前進用ガイドレール 61b 後退用ガイドレール
61c、61d 切欠き部 62 復帰用回転装置
63 プッシャ(押し出し装置) 63a エアシリンダ
63b シリンダロッド 63c 前記押当て部
64 重り 65 ストッパ
70 ウィンチユニット 71 電動ウィンチ本体
72 ワイヤーロープ
80 ベルト貯めユニット(搬送ベルト収納機構)
81 ベルト貯めユニット架構 82 アイドルプーリ
82a 固定型アイドルプーリ 82b 可動型アイドルプーリ
83 カウンターウェイト 84 固定部材
【特許請求の範囲】
【請求項1】
搬送物を搬送物投入口から下流側に位置する到達位置へ搬送させるとともに前記到達位置を変更可能なエアサポート式ベルトコンベヤであって、
前記搬送物投入口の近傍にて水平に固定された回転軸にて回転可能なテールプーリと、 水平な回転軸の位置を変更可能なヘッドプーリと、 そのヘッドプーリおよび前記テールプーリに掛け渡された搬送ベルトと、 前記ヘッドプーリの回転軸を支持するとともにその回転軸の移動軌跡を形成するレール部材と、 そのレール部材に沿ってヘッドプーリおよびその回転軸を移動させるためのヘッドプーリ移動手段と、 そのヘッドプーリ移動手段が移動することによって弛むまたは伸張する前記搬送ベルトを収納または搬出させるとともにその搬送ベルトを所定のテンションに保つ搬送ベルト収納機構と、を備え、
前記搬送ベルトによって搬送される搬送物の重量と搬送ベルトの重量および張力を支持するためのベルト支持手段を搬送経路に沿って複数備え、
前記ヘッドプーリ移動手段の移動時において移動を妨げる位置に該当するベルト支持手段は、内部にエア貯留室を有する半円筒形状のベルト支持体と、 そのベルト支持体の半円筒形の内面と前記搬送ベルトとの間にエア層を形成すべく前記搬送ベルトに向けて前記エア貯留室のエアを噴射する複数のエア噴射孔と、を備えるとともに、 ヘッドプーリ移動手段が上流側あるいは下流側へ移動する際に邪魔にならない位置へベルト支持体を待避させる待避機構を備えたエアサポート式ベルトコンベヤ。
【請求項2】
前記待避機構は、前記搬送経路に沿って延伸した本体フレームと、 その本体フレームに設けた支軸を中心にして前記複数のベルト支持体をその半円のほぼ中心位置で搬送方向を遮る方向と待避する方向へ回転するベルト支持体回転装置と、を備えて構成した請求項1に記載のエアサポート式ベルトコンベヤ。
【請求項3】
前記支軸は、前記搬送経路に沿って延伸させるとともに、エアを供給するエア供給管として形成した請求項1または請求項2のいずれかに記載のエアサポート式ベルトコンベヤ。
【請求項4】
前記ベルト支持体回転装置は、各ベルト支持体における半円筒の外周面のほぼ対角線上に突出して設けたガイドレールと、 前記ヘッドプーリ移動手段が通過前に前記ガイドレールへ突き当てて前記ベルト支持体を待避位置へ向けて回転するべくヘッドプーリ移動手段に設けた突き当て部材と、 前記ヘッドプーリ移動手段が通過後に前記ベルト支持体を回転して搬送ベルトを支持させることができる位置へ戻す復帰用回転装置と、を備えた請求項2または請求項3のいずれかに記載のエアサポート式ベルトコンベヤ。
【請求項5】
前記ガイドレールは、各ベルト支持体における半円筒の外周面の2つのほぼ対角線上に設けた前進用ガイドレールと後退用ガイドレールとで構成し、
前記突き当て部材は、前記ヘッドプーリ移動手段が下流側へ移動する時に前記前進用ガイドレールへ突き当てる前進用突き当て部材と、 前記ヘッドプーリ移動手段が上流側へ移動する時に前記後退用ガイドレールへ突き当てる後退用突き当て部材と、を備えた請求項4に記載のエアサポート式ベルトコンベヤ。
【請求項6】
前記復帰用回転装置は、待避位置のベルト支持体に対して搬送ベルトを支持させることができる位置へ戻す方向へ押し出すための押し出し装置と、 その押し出し装置にて押し出す側のベルト支持体の一側縁に設けた重りと、を備えた請求項4または請求項5のいずれかに記載のエアサポート式ベルトコンベヤ。
【請求項1】
搬送物を搬送物投入口から下流側に位置する到達位置へ搬送させるとともに前記到達位置を変更可能なエアサポート式ベルトコンベヤであって、
前記搬送物投入口の近傍にて水平に固定された回転軸にて回転可能なテールプーリと、 水平な回転軸の位置を変更可能なヘッドプーリと、 そのヘッドプーリおよび前記テールプーリに掛け渡された搬送ベルトと、 前記ヘッドプーリの回転軸を支持するとともにその回転軸の移動軌跡を形成するレール部材と、 そのレール部材に沿ってヘッドプーリおよびその回転軸を移動させるためのヘッドプーリ移動手段と、 そのヘッドプーリ移動手段が移動することによって弛むまたは伸張する前記搬送ベルトを収納または搬出させるとともにその搬送ベルトを所定のテンションに保つ搬送ベルト収納機構と、を備え、
前記搬送ベルトによって搬送される搬送物の重量と搬送ベルトの重量および張力を支持するためのベルト支持手段を搬送経路に沿って複数備え、
前記ヘッドプーリ移動手段の移動時において移動を妨げる位置に該当するベルト支持手段は、内部にエア貯留室を有する半円筒形状のベルト支持体と、 そのベルト支持体の半円筒形の内面と前記搬送ベルトとの間にエア層を形成すべく前記搬送ベルトに向けて前記エア貯留室のエアを噴射する複数のエア噴射孔と、を備えるとともに、 ヘッドプーリ移動手段が上流側あるいは下流側へ移動する際に邪魔にならない位置へベルト支持体を待避させる待避機構を備えたエアサポート式ベルトコンベヤ。
【請求項2】
前記待避機構は、前記搬送経路に沿って延伸した本体フレームと、 その本体フレームに設けた支軸を中心にして前記複数のベルト支持体をその半円のほぼ中心位置で搬送方向を遮る方向と待避する方向へ回転するベルト支持体回転装置と、を備えて構成した請求項1に記載のエアサポート式ベルトコンベヤ。
【請求項3】
前記支軸は、前記搬送経路に沿って延伸させるとともに、エアを供給するエア供給管として形成した請求項1または請求項2のいずれかに記載のエアサポート式ベルトコンベヤ。
【請求項4】
前記ベルト支持体回転装置は、各ベルト支持体における半円筒の外周面のほぼ対角線上に突出して設けたガイドレールと、 前記ヘッドプーリ移動手段が通過前に前記ガイドレールへ突き当てて前記ベルト支持体を待避位置へ向けて回転するべくヘッドプーリ移動手段に設けた突き当て部材と、 前記ヘッドプーリ移動手段が通過後に前記ベルト支持体を回転して搬送ベルトを支持させることができる位置へ戻す復帰用回転装置と、を備えた請求項2または請求項3のいずれかに記載のエアサポート式ベルトコンベヤ。
【請求項5】
前記ガイドレールは、各ベルト支持体における半円筒の外周面の2つのほぼ対角線上に設けた前進用ガイドレールと後退用ガイドレールとで構成し、
前記突き当て部材は、前記ヘッドプーリ移動手段が下流側へ移動する時に前記前進用ガイドレールへ突き当てる前進用突き当て部材と、 前記ヘッドプーリ移動手段が上流側へ移動する時に前記後退用ガイドレールへ突き当てる後退用突き当て部材と、を備えた請求項4に記載のエアサポート式ベルトコンベヤ。
【請求項6】
前記復帰用回転装置は、待避位置のベルト支持体に対して搬送ベルトを支持させることができる位置へ戻す方向へ押し出すための押し出し装置と、 その押し出し装置にて押し出す側のベルト支持体の一側縁に設けた重りと、を備えた請求項4または請求項5のいずれかに記載のエアサポート式ベルトコンベヤ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−46298(P2012−46298A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−189120(P2010−189120)
【出願日】平成22年8月26日(2010.8.26)
【出願人】(591061448)東京産業株式会社 (8)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月26日(2010.8.26)
【出願人】(591061448)東京産業株式会社 (8)
【Fターム(参考)】
[ Back to top ]