
カーナビゲーション装置
【課題】自車位置の算出精度を向上できるカーナビゲーション装置を提供する。
【解決手段】カーナビゲーション装置は、自車両の位置(自車位置)を検出する自車位置検出手段と、自車両と対象物との距離を外部から受信する距離情報受信手段と、道路地図データに基づいて対象物の位置を推定する対象物位置推定手段と、距離情報受信手段で受信した距離と、対象物位置推定手段で推定した対象物の位置とに基づいて、自車位置検出手段で検出した自車位置を補正する自車位置補正手段とを備えることを特徴とする。
【解決手段】カーナビゲーション装置は、自車両の位置(自車位置)を検出する自車位置検出手段と、自車両と対象物との距離を外部から受信する距離情報受信手段と、道路地図データに基づいて対象物の位置を推定する対象物位置推定手段と、距離情報受信手段で受信した距離と、対象物位置推定手段で推定した対象物の位置とに基づいて、自車位置検出手段で検出した自車位置を補正する自車位置補正手段とを備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カーナビゲーション装置の自車位置算出技術に関する。
【背景技術】
【0002】
たとえば車両に搭載され、車両の現在位置(自車位置)を算出して、算出した自車位置の周辺の地図とともに自車位置を表示したり、自車位置から目的地までの推奨経路を演算して、推奨経路に沿って車両を経路誘導したりするカーナビゲーション装置が知られている。このカーナビゲーション装置では、算出された自車位置に誤差が含まれている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−20365号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した特許文献に記載のように、カーナビゲーション装置で算出された自車位置に誤差が含まれているため、自車位置の算出精度をさらに向上させることが望まれている。
【課題を解決するための手段】
【0005】
(1) 請求項1の発明によるカーナビゲーション装置は、自車両の位置である自車位置を検出する自車位置検出手段と、自車両と対象物との距離を外部から受信する距離情報受信手段と、道路地図データに基づいて対象物の位置を推定する対象物位置推定手段と、距離情報受信手段で受信した距離と、対象物位置推定手段で推定した対象物の位置とに基づいて、自車位置検出手段で検出した自車位置を補正する自車位置補正手段とを備えることを特徴とする。
(2) 請求項6の発明によるカーナビゲーション装置は、自車位置を検出する自車位置検出手段と、他車両の位置を受信する他車両位置情報受信手段と、自車両から他車両までの距離及び方位を検出する位置関係検出手段と、他車両位置情報受信手段で受信した他車両の位置と、位置関係検出で検出した自車両から他車両までの距離及び方位とに基づいて、自車位置検出手段で検出した自車位置を補正する自車位置補正手段とを備えることを特徴とする。
【発明の効果】
【0006】
本発明によれば、自車位置の算出精度を向上できる。
【図面の簡単な説明】
【0007】
【図1】第1の実施の形態のカーナビゲーション装置の構成を示す図である。
【図2】T字路の交差点の例を示す図である。
【図3】第1の実施の形態の、車両の現在位置を算出して表示モニタ上に表示する処理の動作を示したフローチャートである。
【図4】第2の実施の形態のカーナビゲーション装置の構成を示す図である。
【図5】自車と他の車両との位置関係の例を示す図である。
【図6】第2の実施の形態の、車両の現在位置を算出して表示モニタ上に表示する処理の動作を示したフローチャートである。
【発明を実施するための形態】
【0008】
−−−第1の実施の形態−−−
図1〜3を参照して、本発明によるカーナビゲーション装置の第1の実施の形態を説明する。図1は、第1の実施の形態におけるカーナビゲーション装置1の構成を示す図である。カーナビゲーション装置1は、車両に搭載されており、車両の現在位置を道路地図上に表示して、目的地まで車両を誘導する。このとき、道路地図データに基づいて公知のマップマッチング処理を行うことにより、車両の現在位置を道路地図上に表示できるようにしたものである。以下の説明では、カーナビゲーション装置1を搭載する車両(自車)を、単に車両とも呼ぶ。カーナビゲーション装置1は、車両位置周辺の道路地図を表示する機能、出発地から目的地までの推奨経路を演算する機能、演算された推奨経路に基づいて経路誘導を行う機能など、車両の走行に関する情報を提示する機能を兼ね備えている。
【0009】
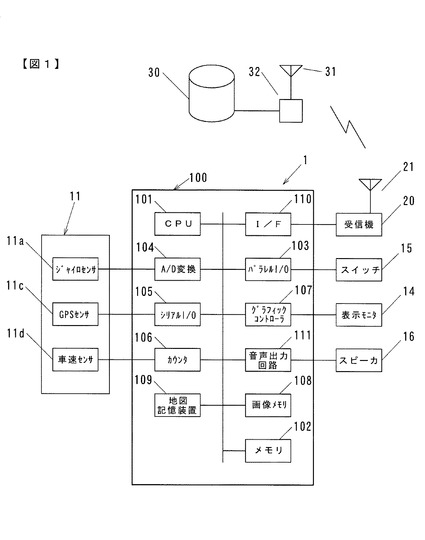
図1において、11は車両の現在地を検出する現在地検出装置であり、たとえば車両の進行方位の変化量を検出するジャイロセンサ11a、GPS(Global Positioning System)衛星からのGPS信号を検出するGPSセンサ11c、車速を検出する車速センサ11d等から成る。
【0010】
100は制御装置であり、CPU101およびその周辺回路から成る。CPU101およびその周辺回路は互いにバスで接続されている。周辺回路は、メモリ102、パラレルI/O103、A/D変換器104、シリアルI/O105、カウンタ106、グラフィックコントローラ107、画像メモリ108、地図記憶装置109、インターフェース(I/F)110、音声出力回路111等から成る。14は車室内の乗員が視認可能な位置に配設されて、地図や各種情報を表示する表示モニタである。
【0011】
15は乗員が車両の目的地等の入力など、各種操作入力を行うためのスイッチである。スイッチ15は、表示モニタ14の画面上に設けられたタッチパネルスイッチや、カーソルの移動や画面のスクロールを指示するジョイスティックなどを含む。スイッチ15は、リモコンスイッチであってもよく、表示画面周辺に設けられたスイッチであってもよい。16は、音声出力回路111から出力される音声信号を音声として出力するスピーカである。
【0012】
制御装置100のメモリ102は、制御プログラムを格納するROM、作業エリアのRAM、および、各種設定値などを記憶する不揮発メモリを含むメモリである。CPU101は、メモリ102にアクセスして制御プログラムを実行し、各種の制御を行う。パラレルI/O103は、スイッチ15を構成する個別のスイッチ等が接続されるパラレルI/Oポートである。A/D変換器104は、ジャイロセンサ11aのアナログ信号をA/D変換する変換器である。シリアルI/O105は、GPSセンサ11cからのシリアル信号を受信するシリアルI/Oポートである。カウンタ106は、たとえば車軸の回転に伴って車速センサ11dから出力されるパルス信号をカウントするカウンタである。
【0013】
グラフィックコントローラ107は、CPU101から出力される表示データを、画像データとして画像メモリ(ビデオRAM)であるメモリ108に格納し、メモリ108に格納された画像データを表示モニタ14に表示するための制御を行う。CPU101から出力される表示データは、各種の文字データや道路地図などの各種の図形データなどから成る。制御装置100は、表示モニタ14の表示制御装置として機能する。
【0014】
地図記憶装置109は、ナビゲーション処理に使用する道路地図データやPOI情報(Point of Interest 観光地や各種施設の情報)など各種の情報を格納する地図記憶装置であり、ハードディスク装置が用いられている。なお、地図記憶装置109は、ハードディスク装置以外にも、道路地図データが格納されたCD−ROMやDVD、その他の記録媒体、および、その読み出し装置であってもよい。
【0015】
なお、道路地図データは、地図に関する情報であり、地図表示用データ、経路探索用データ、誘導データ(交差点名称・道路名称・方面名称・方向ガイド・施設情報など)などから成る。地図表示用データは道路や道路地図の背景を表示するためのデータである。経路探索用データは、道路形状とは直接関係しない分岐情報などから成るデータであり、主に推奨経路を演算(経路探索)する際に用いられる。誘導データは、交差点の名称などから成るデータであり、演算された推奨経路に基づき運転者等に推奨経路を誘導する際に用いられる。道路地図データは、道路をノードとリンクで表現したデータであり、交差点にノードが対応し、各ノード間を結ぶ線分がリンクに対応する。
【0016】
I/F110は、後述する受信機20を接続するためのインターフェースである。受信機20は、後述する路側のビーコン装置32から送信される交通情報(VICS(登録商標)情報)等をアンテナ21を介して受信する受信機である。
【0017】
なお、ビーコン装置32は、VICS(Vehicle Information and Communication System)センタに設けられた管理サーバ30からの安全運転支援情報や道路交通情報等の各種情報を無線アンテナ31を介して受信機20に送信する。
【0018】
このように構成されるカーナビゲーション装置1は、現在地検出装置11により取得した情報および地図記憶装置109に格納されている道路地図データに基づき各種のナビゲーションを行う。たとえば、制御装置100のCPU101は、現在地検出装置11により取得した情報および地図記憶装置109に格納されている道路地図データに基づき、自車位置を算出する。このとき、CPU101は、公知のマップマッチングの手法により、自車位置を道路地図データのリンク上に設定する。そして、CPU101は、算出した自車位置近辺の道路地図および自車位置を表示モニタ14に表示するよう各部を制御する。また、CPU101は、経路探索によって得られた経路(推奨経路)に沿ってドライバを誘導するように各部を制御する。
【0019】
CPU101は、誤差やノイズを含む現在地検出装置11の各センサの出力を用いて刻々と変化する自車位置を算出する。自車位置算出の過程で、たとえば公知のカルマンフィルタが用いられ、算出される自車位置の誤差(以下、誤差Ecと表す)の推定が可能となる。
【0020】
−−−自車位置の補正について−−−
近年、たとえば「神奈川県DSSS・SKYプロジェクト」における出会い頭の事故防止の対策として、路側のビーコン装置32から車両に対して、車両の前方に一時停止をしなければならない箇所があることを通知すること等が行われている。たとえば「神奈川県DSSS・SKYプロジェクト」では、道路上の一時停止線(停止線)までの距離の情報を路側のビーコン装置32から車両に対して送信することも行われている。また、車両側では、受信した停止線までの距離の情報に基づいて、停止線の手前で車両が停止するように制御することも行われている。
【0021】
ここで、当該停止線の位置(絶対位置)が分かれば、当該停止線の位置と、当該停止線までの距離(車両に対する停止線の相対位置)の情報とに基づいて、自車位置の算出精度を高めることが考えられる。しかし、道路地図データに停止線の位置の情報やビーコン装置32の設置位置の情報がない場合には、受信した停止線までの距離の情報だけでは自車位置を算出できない。
【0022】
そこで、本実施の形態では、次のようにして当該停止線の位置(絶対位置)を推定する。そして、推定した当該停止線の位置の誤差が上述した自車位置の算出誤差よりも小さいときには、当該停止線の位置と、当該停止線までの距離の情報とに基づいて、自車位置を補正する。
【0023】
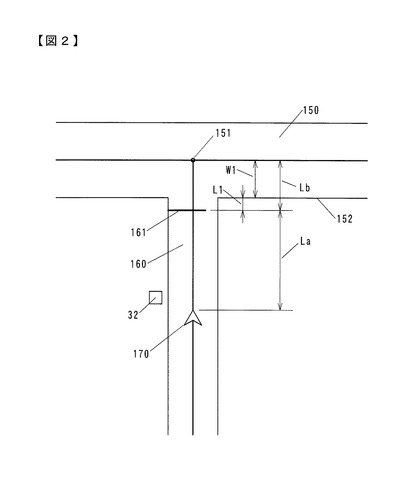
CPU101は、停止線の位置を次のようにして推定する。なお、受信した停止線までの距離の情報には、当該情報を車両が受信する位置から当該停止線までの距離Laが含まれているものとする。CPU101は、受信機20で停止線までの距離の情報を受信すると、自車位置の存在する(車両が走行している)道路(以下、走行道路と呼ぶ)と自車位置の前方で交差する道路(以下、交差道路と呼ぶ)についての、幅員数、道幅、道路種別の情報を道路地図データから取得する。すなわち、CPU101は、走行道路と交差道路との交差点のノードに含まれる情報から、幅員数、道幅、道路種別の情報を取得する。そして、CPU101は、取得した情報から、上記交差点のノードから交差道路の自車位置側の路側までの距離W1を算出する。具体的には、CPU101は、次のようにして、距離W1を算出する。
【0024】
たとえば、図2に示すようなT字路の交差点を例に説明する。図2において、150は交差道路であり、151は交差点のノードであり、152は交差道路150の自車位置側の路側である。160は走行道路であり、161は停止線であり、170は車両(自車)である。たとえば、「交差点のノード151が上り車線のノードであり、車線数が3車線であり、道幅が3mである」という情報を取得した場合、CPU101は、交差点のノード151が3車線のうちの中央の車線の中心に存在するものと判断して、交差点のノード151から交差道路150の自車位置側の路側152までの距離W1が(3m)×(3車線/2)=4.5mであると算出する。
【0025】
また、CPU101は、交差道路150の自車位置側の路側152から、走行道路160上の停止線161までの距離L1を推定する。ここで、たとえば距離L1が1mの固定された値にあらかじめ設定されているものとする。この場合、距離L1が1mであるという情報が制御装置100のメモリ102のうち各種設定値などを記憶する不揮発メモリに格納されている。CPU101は、当該不揮発メモリに格納されている距離L1の情報を読み込むことで、距離L1の値を得る。
【0026】
距離W1と距離L1との和が、交差点のノード151から停止線161までの距離Lbであると推定される。したがって、停止線161の位置と、停止線161までの距離の情報(すなわち距離Laについての情報)とに基づいて算出される自車位置は、外部から取得した停止線までの距離Laと上記のように推定した距離Lbとの和(La+Lb)だけ交差点のノード151から走行道路160のリンクに沿って手前の位置となる。
【0027】
なお、上述のようにして距離W1を算出する際、交差道路150の歩道の有無、および歩道の道幅を考慮していない。また、停止線161は、たとえば、交差道路150から走行道路160へ侵入する車両の内輪差を考慮して、走行道路160の道幅が狭い場合や、交差道路150と走行道路160との交差角度が小さい場合などでは、交差点から離れた位置に設けられることが考えられる。そのため、上述のようにして算出した交差点のノード151から停止線161までの距離Lbには、数m(たとえば2m程度)の誤差Eがあるものと考えられる。
【0028】
そこで、本実施の形態では、算出される自車位置の誤差Ecの推定値が、上記誤差Eよりも大きい場合に限って、停止線までの距離Laと上記距離Lbとの和(La+Lb)だけ交差点のノード151から走行道路160のリンクに沿って手前の位置を自車位置とする。すなわち、算出される自車位置の誤差Ecの推定値が、上記誤差Eよりも大きい場合に限って、現在地検出装置11により取得した情報および地図記憶装置109に格納されている道路地図データに基づいて算出した自車位置を、停止線の位置と、停止線までの距離の情報とに基づいて算出される自車位置で補正する。
【0029】
なお、本実施の形態では、たとえば誤差Eが2mの固定された値にあらかじめ設定されているものとする。この場合、誤差Eが2mであるという情報が制御装置100のメモリ102のうち各種設定値などを記憶する不揮発メモリに格納されている。CPU101は、当該不揮発メモリに格納されている誤差Eの情報を読み込むことで、誤差Eの値を得る。
【0030】
−−−フローチャート−−−
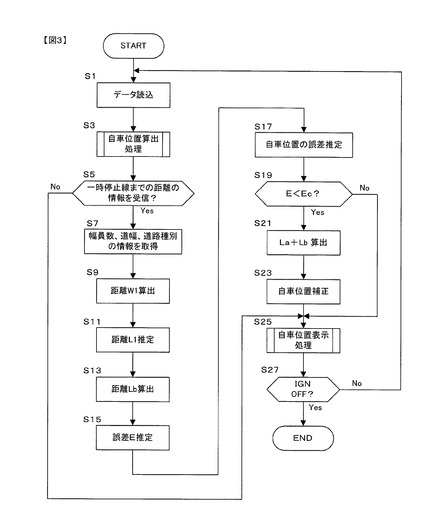
図3は、車両の現在位置を算出して表示モニタ14上に表示する処理の動作を示したフローチャートである。車両の不図示のイグニッションキーにより不図示のアクセサリスイッチがオン(ACC ON)されると、カーナビゲーション装置1の電源がオンされて、図3に示す処理を行うプログラムが起動されてCPU101で実行される。ステップS1において、現在地検出装置11からの各情報や、道路地図データなどを読み込んでステップS3へ進む。
【0031】
ステップS3において、ステップS1で読み込んだ現在地検出装置11からの各情報に基づいて自車位置を算出する。なお、ステップS3における自車位置算出処理は、従来の現在位置算出処理と同様であり公知であるため、説明を省略する。また、自車位置算出に際し、自車位置の誤差Ecの推定が可能であることは、上述のとおりである。
【0032】
ステップS5において、ビーコン装置32から停止線までの距離の情報を受信したか否かを判断する。ステップS5が肯定判断されるとステップS7へ進み、走行道路160と交差道路150との交差点151のノードに含まれる情報から、幅員数、道幅、道路種別の情報を取得してステップS9へ進む。ステップS9において、ステップS7で取得した幅員数、道幅、道路種別の情報から、交差点のノード151から交差道路150の自車位置側の路側152までの距離W1を算出してステップS11へ進む。
【0033】
ステップS11において、交差道路150の自車位置側の路側152から、走行道路160上の停止線161までの距離L1を推定する。上述したように、本実施の形態では、ステップS11において、たとえば制御装置100のメモリ102から距離L1の情報を読み込むことで、距離L1の値を得る。
【0034】
ステップS11が実行されるとステップS13へ進み、ステップS9で算出した距離W1と、ステップS11で推定した距離L1との和である、交差点のノード151から停止線161までの距離Lbを算出してステップS15へ進む。ステップS15において、交差点のノード151から停止線161までの距離Lbの誤差Eを推定する。上述したように、本実施の形態では、ステップS15において、たとえば制御装置100のメモリ102から誤差Eの情報を読み込むことで、誤差Eの値を得る。
【0035】
ステップS15が実行されるとステップS17へ進み、ステップS3で算出される自車位置の誤差Ecを推定してステップS19へ進む。ステップS19において、ステップS15で推定した距離Lbの誤差EよりもステップS17で推定した自車位置の誤差Ecの推定値が大きいか否かを判断する。ステップS19が肯定判断されるとステップS21へ進み、ステップS5で受信した停止線までの距離の情報から得られる距離Laと、ステップS13で算出した距離Lbとの和を算出してステップS23へ進む。
【0036】
ステップS23において、ステップS3で算出した自車位置に代えて、交差点のノード151の位置からステップS21で算出した距離Laと距離Lbとの和(La+Lb)だけ手前の位置を新たな自車位置として設定して(すなわち自車位置を補正して)ステップS25へ進む。ステップS25において、算出または補正された自車位置に基づいて、表示モニタ14に表示された地図上に車両の現在位置を示すカーマークを重畳表示するよう各部を制御してステップS27へ進む。
【0037】
ステップS27において、不図示のイグニッションスイッチがオフされたか否かを判断する。ステップS27が肯定判断されると、本プログラムを終了する。ステップS27が否定判断されると、ステップS1へ戻る。
【0038】
ステップS19が否定判断されると、ステップS25へ進む。ステップS5が否定判断されると、ステップS25へ進む。
【0039】
本実施の形態のカーナビゲーション装置1では、次の作用効果を奏する。
(1) 車両前方の停止線までの距離の情報を路側のビーコン装置32から受信すると、当該停止線の位置を推定するように構成した。そして、当該停止線までの距離の情報と当該停止線の位置とに基づいて、自車位置を補正するように構成した。これにより、簡単な演算処理によって自車位置の算出精度を向上できる。また、ハードウェアの構成で特に機器を追加しなくても、ソフトウェア的な処理だけで自車位置の算出精度を向上でき、コストアップを抑制できる。
【0040】
(2) 自車位置の誤差Ecの推定値が、交差点のノード151から停止線161までの距離Lbの誤差Eよりも大きい場合に限って、停止線までの距離Laと上記距離Lbとの和(La+Lb)だけ交差点のノード151より手前の位置を自車位置とするように構成した。これにより、補正によって自車位置の精度向上が見込める場合にだけ自車位置が補正されるため、補正によって逆に自車位置の精度を劣化させてしまうおそれがない。
【0041】
(3) 車両前方の停止線までの距離の情報を路側のビーコン装置32から受信すると、当該ビーコン装置32の位置ではなく、当該停止線の位置を推定するように構成した。走行道路160と交差道路150との交差点のノード151に従来から含まれる情報を利用することで当該停止線の位置を推定できるので、道路地図データに停止線の位置の情報やビーコン装置32の設置位置の情報がない場合でも、道路地図データに新たな情報を付加することなく、当該停止線の位置を推定できる。したがって、コストアップを抑制できる。
【0042】
(4) 路側のビーコン装置32から送信される車両前方の停止線までの距離の情報を利用するようにしたので、既存のインフラおよび当該インフラから提供される情報に手を加える必要がなく、本発明によるカーナビゲーション装置1を普及させ易い。
【0043】
−−−第2の実施の形態−−−
図4〜6を参照して、本発明によるカーナビゲーション装置の第2の実施の形態を説明する。以下の説明では、第1の実施の形態と同じ構成要素には同じ符号を付して相違点を主に説明する。特に説明しない点については、第1の実施の形態と同じである。本実施の形態では、主に、車車間通信によって得られる他車の位置の情報に基づいて自車位置の算出精度を向上させる点で、第1の実施の形態と異なる。
【0044】
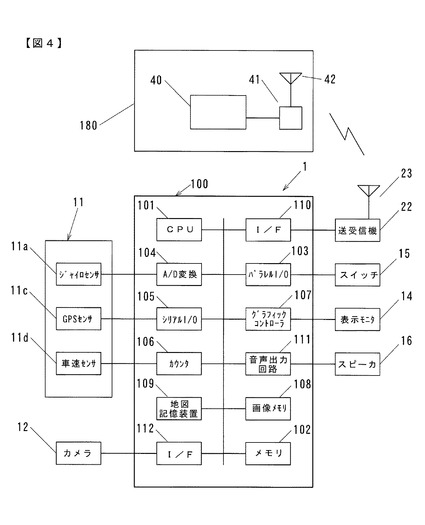
図4は、第2の実施の形態のカーナビゲーション装置1の構成を示す図である。カーナビゲーション装置1は、送受信機22とインターフェース(I/F)112とを備えている。送受信機22は、他の車両との間でアンテナ23を介して車車間通信を行うための送受信機である。I/F110は、カメラ12を接続するためのインターフェースである。カメラ12は、たとえば、あらかじめ車両に搭載されている車間距離検出用途などのカメラであってもよく、本実施の形態のカーナビゲーション装置1のために設けたカメラであってもよい。なお、180は他の車両であり、40は他の車両180に搭載されているカーナビゲーション装置であり、41は他の車両180以外の車両との間でアンテナ42を介して車車間通信を行うための送受信機である。
【0045】
−−−自車位置の補正について−−−
本実施の形態では、車車間通信によって他の車両180から他の車両180の現在位置の情報、現在位置の誤差の情報、および自動車登録番号(すなわち自動車用ナンバープレートのナンバー)の情報が送信されているものとする。本実施の形態では、他の車両180から車車間通信によって送信されたこれらの情報を取得するとともに、カメラ12で撮像して得られた画像に基づいて、自車に対する他の車両180の位置関係(すなわち相対位置を表す方位(方向)と距離)、および、自動車登録番号標(自動車用ナンバープレート)に記載された自動車登録番号(自動車用ナンバープレートのナンバー)を検出する。そして、車車間通信で取得した他の車両180の自動車登録番号とカメラ12で撮像して得られた画像に基づいて検出された自動車登録番号とが一致し、かつ、車車間通信で取得した他の車両180の現在位置の誤差が自車位置の誤差よりも小さい場合に、車車間通信で取得した他の車両180の現在位置の情報および画像処理によって検出した他の車両180との位置関係(相対位置)に基づいて、自車位置を補正する。
【0046】
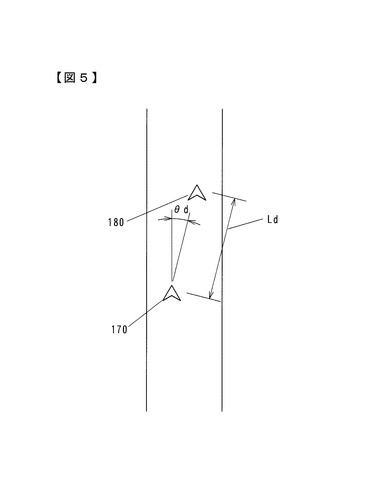
具体的には、CPU101は、送受信機22を介して車車間通信により他の車両180の現在位置の情報、現在位置の情報の誤差Edの情報および自動車登録番号の情報を取得する。また、CPU101は、カメラ12で撮像して得られた画像に対して公知の画像処理を行うことで、カメラ12の撮像範囲内に他の車両が存在するか否かを判断する。カメラ12の撮像範囲内に他の車両が存在する場合には、CPU101は、他の車両が存在する方向(たとえば図5に示した自車の前方からのずれ角度θd)、他の車両までの距離Ld、および、自動車登録番号標に記載された自動車登録番号を検出する。そして、CPU101は、車車間通信で取得した他の車両180の自動車登録番号とカメラ12で撮像して得られた画像に基づいて検出された自動車登録番号とが一致し、かつ、車車間通信で取得した他の車両180の現在位置の誤差Edが自車位置の誤差Ecよりも小さいか否かを判断する。当該判断が肯定判断されると、CPU101は、現在地検出装置11により取得した情報および地図記憶装置109に格納されている道路地図データに基づいて算出した自車位置を、車車間通信で取得した他の車両180の現在位置と、画像処理によって得られた他の車両が存在する方向(ずれ角度θd)および他の車両までの距離Ldとによって算出される自車位置で置き換える。
【0047】
−−−フローチャート−−−
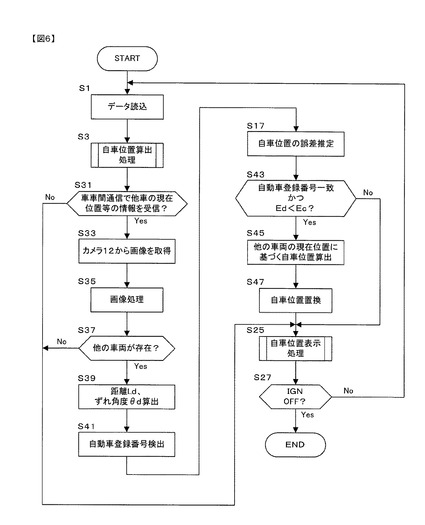
図6は、本実施に形態における、車両の現在位置を算出して表示モニタ14上に表示する処理の動作を示したフローチャートである。車両の不図示のイグニッションキーにより不図示のアクセサリスイッチがオン(ACC ON)されると、カーナビゲーション装置1の電源がオンされて、図6に示す処理を行うプログラムが起動されてCPU101で実行される。ステップS1およびステップS3は、上述した第1の実施の形態における図3に示したステップS1およびステップS3の動作と同じである。
【0048】
ステップS3が実行されるとステップS31へ進み、送受信機22を介して車車間通信により他の車両180の現在位置の情報、現在位置の情報の誤差Edの情報および自動車登録番号の情報を取得したか否かを判断する。ステップS31が否定判断されるとステップS25へ進む。なお、ステップS25以降の動作については、上述した第1の実施の形態における図3に示したステップS25以降の動作と同じである。ステップS31が肯定判断されるとステップS33へ進み、カメラ12で撮像して得られた画像を取得してステップS35へ進む。
【0049】
ステップS35において、ステップS33で取得した画像に公知の画像処理を行うことで他の車両の画像を抽出してステップS37へ進む。ステップS37において、ステップS35における画像処理によって他の車両の画像が抽出できたか否か、すなわち、他の車両がカメラ12の撮像範囲内に存在していたか否かを判断する。ステップS37が否定判断されるとステップS25へ進む。ステップS37が肯定判断されるとステップS39へ進み、画像処理の結果から他の車両が存在する方向(ずれ角度θd)および他の車両までの距離Ldを算出してステップS41へ進む。
【0050】
ステップS41において、画像処理の結果から他の車両の自動車登録番号を検出してステップS17へ進む。ステップS17は、上述した第1の実施の形態における図3に示したステップS17の動作と同じである。ステップS17が実行されるとステップS43へ進み、ステップS31で取得した他の車両180の自動車登録番号とステップS41で検出した自動車登録番号とが一致し、かつ、ステップS31で取得した他の車両180の現在位置の誤差EdがステップS17で推定した自車位置の誤差Ecよりも小さいか否かを判断する。
【0051】
ステップS43が否定判断されるとステップS25へ進む。ステップS43が肯定判断されるとステップS45へ進み、ステップS31で取得した他の車両180の現在位置の情報と、ステップS39で算出したずれ角度θdおよび距離Ldに基づいて自車位置を算出してステップS47へ進む。ステップS47において、ステップS3で算出した自車位置をステップS47で算出した自車位置で置き換えてステップS25へ進む。
【0052】
第2の実施の形態のカーナビゲーション装置1では、第1の実施の形態における作用効果に加えて、次の作用効果を奏する。
(1) 車車間通信で取得した他の車両180の現在位置の情報および画像処理によって検出した他の車両180の位置関係に基づいて、自車位置を補正するように構成した。これにより、第1の実施の形態に比べて、自車位置補正の機会が増えるので、高い自車位置の算出精度を維持できる。
【0053】
(2) 自車位置の誤差Ecの推定値が、車車間通信で取得した他の車両180の現在位置の誤差Edよりも大きい場合に限って、自車位置を補正するように構成した。これにより、補正によって自車位置の精度向上が見込める場合にだけ自車位置が補正されるため、補正によって逆に自車位置の精度を劣化させてしまうおそれがない。
【0054】
(3) 車車間通信で取得した他の車両180の自動車登録番号とカメラ12で撮像して得られた画像に基づいて検出された自動車登録番号とが一致した場合に限って、自車位置を補正するように構成した。これにより、周囲に他の車両が複数存在する場合であっても、車車間通信で情報を取得した他の車両と、カメラ12で撮像して得られた画像から自車との相対位置を算出する対象となった他の車両とが一致しないまま自車位置の補正を行ってしまうおそれがない。
【0055】
−−−変形例−−−
(1) 上述した第1の実施の形態では、自車位置を補正する際に、停止線を表す道路表示の表示位置を推定するように構成したが、本発明はこれに限定されない。停止線を表す道路表示の表示位置に代えて、たとえば、道路同士の合流部の位置、登坂車線の終了部分の位置、道路の勾配が上り勾配から下り勾配に変化する地点の位置、道路の勾配が下り勾配から上り勾配に変化する地点の位置を推定するように構成してもよい。
【0056】
(2) 上述した第1の実施の形態において、車両から停止線までの距離の誤差(たとえばビーコン装置32からの情報を受信する位置の誤差)を加味してもよい。
(3) 上述した第1の実施の形態において、停止線の推定位置の誤差がそれほど大きくなるとは考えられないため、交差点のノード151から停止線161までの距離Lbの誤差Eに関わらず、自車位置を補正するように構成してもよい。
【0057】
(4) 上述した第2の実施の形態において、カメラ12で撮像して得られた画像に基づいて自車に対する位置関係が算出できるのであれば、自車位置の補正のために現在位置の情報を利用する他の車両180は前走車である必要がない。
(5) 上述した第2の実施の形態において、自車に対する相対位置が算出(検出)できる装置であれば、カメラ12に代えてミリ波レーダ等を用いてもよい。
(6) 上述した各実施の形態および変形例は、それぞれ組み合わせてもよい。
【0058】
なお、本発明は、上述した実施の形態のものに何ら限定されず、自車両の位置(自車位置)を検出する自車位置検出手段と、自車両と対象物との距離を外部から受信する距離情報受信手段と、道路地図データに基づいて対象物の位置を推定する対象物位置推定手段と、距離情報受信手段で受信した距離と、対象物位置推定手段で推定した対象物の位置とに基づいて、自車位置検出手段で検出した自車位置を補正する自車位置補正手段とを備えることを特徴とする各種構造のカーナビゲーション装置を含むものである。
また、本発明は、上述した実施の形態のものに何ら限定されず、自車位置を検出する自車位置検出手段と、他車両の位置を受信する他車両位置情報受信手段と、自車両から他車両までの距離及び方位を検出する位置関係検出手段と、他車両位置情報受信手段で受信した他車両の位置と、位置関係検出で検出した自車両から他車両までの距離及び方位とに基づいて、自車位置検出手段で検出した自車位置を補正する自車位置補正手段とを備えることを特徴とする各種構造のカーナビゲーション装置を含むものである。
【符号の説明】
【0059】
1 カーナビゲーション装置 11 現在地検出装置
12 カメラ 20 受信機
22 送受信機 32 ビーコン装置
101 CPU 170 車両(自車)
180 他の車両
【技術分野】
【0001】
本発明は、カーナビゲーション装置の自車位置算出技術に関する。
【背景技術】
【0002】
たとえば車両に搭載され、車両の現在位置(自車位置)を算出して、算出した自車位置の周辺の地図とともに自車位置を表示したり、自車位置から目的地までの推奨経路を演算して、推奨経路に沿って車両を経路誘導したりするカーナビゲーション装置が知られている。このカーナビゲーション装置では、算出された自車位置に誤差が含まれている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−20365号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した特許文献に記載のように、カーナビゲーション装置で算出された自車位置に誤差が含まれているため、自車位置の算出精度をさらに向上させることが望まれている。
【課題を解決するための手段】
【0005】
(1) 請求項1の発明によるカーナビゲーション装置は、自車両の位置である自車位置を検出する自車位置検出手段と、自車両と対象物との距離を外部から受信する距離情報受信手段と、道路地図データに基づいて対象物の位置を推定する対象物位置推定手段と、距離情報受信手段で受信した距離と、対象物位置推定手段で推定した対象物の位置とに基づいて、自車位置検出手段で検出した自車位置を補正する自車位置補正手段とを備えることを特徴とする。
(2) 請求項6の発明によるカーナビゲーション装置は、自車位置を検出する自車位置検出手段と、他車両の位置を受信する他車両位置情報受信手段と、自車両から他車両までの距離及び方位を検出する位置関係検出手段と、他車両位置情報受信手段で受信した他車両の位置と、位置関係検出で検出した自車両から他車両までの距離及び方位とに基づいて、自車位置検出手段で検出した自車位置を補正する自車位置補正手段とを備えることを特徴とする。
【発明の効果】
【0006】
本発明によれば、自車位置の算出精度を向上できる。
【図面の簡単な説明】
【0007】
【図1】第1の実施の形態のカーナビゲーション装置の構成を示す図である。
【図2】T字路の交差点の例を示す図である。
【図3】第1の実施の形態の、車両の現在位置を算出して表示モニタ上に表示する処理の動作を示したフローチャートである。
【図4】第2の実施の形態のカーナビゲーション装置の構成を示す図である。
【図5】自車と他の車両との位置関係の例を示す図である。
【図6】第2の実施の形態の、車両の現在位置を算出して表示モニタ上に表示する処理の動作を示したフローチャートである。
【発明を実施するための形態】
【0008】
−−−第1の実施の形態−−−
図1〜3を参照して、本発明によるカーナビゲーション装置の第1の実施の形態を説明する。図1は、第1の実施の形態におけるカーナビゲーション装置1の構成を示す図である。カーナビゲーション装置1は、車両に搭載されており、車両の現在位置を道路地図上に表示して、目的地まで車両を誘導する。このとき、道路地図データに基づいて公知のマップマッチング処理を行うことにより、車両の現在位置を道路地図上に表示できるようにしたものである。以下の説明では、カーナビゲーション装置1を搭載する車両(自車)を、単に車両とも呼ぶ。カーナビゲーション装置1は、車両位置周辺の道路地図を表示する機能、出発地から目的地までの推奨経路を演算する機能、演算された推奨経路に基づいて経路誘導を行う機能など、車両の走行に関する情報を提示する機能を兼ね備えている。
【0009】
図1において、11は車両の現在地を検出する現在地検出装置であり、たとえば車両の進行方位の変化量を検出するジャイロセンサ11a、GPS(Global Positioning System)衛星からのGPS信号を検出するGPSセンサ11c、車速を検出する車速センサ11d等から成る。
【0010】
100は制御装置であり、CPU101およびその周辺回路から成る。CPU101およびその周辺回路は互いにバスで接続されている。周辺回路は、メモリ102、パラレルI/O103、A/D変換器104、シリアルI/O105、カウンタ106、グラフィックコントローラ107、画像メモリ108、地図記憶装置109、インターフェース(I/F)110、音声出力回路111等から成る。14は車室内の乗員が視認可能な位置に配設されて、地図や各種情報を表示する表示モニタである。
【0011】
15は乗員が車両の目的地等の入力など、各種操作入力を行うためのスイッチである。スイッチ15は、表示モニタ14の画面上に設けられたタッチパネルスイッチや、カーソルの移動や画面のスクロールを指示するジョイスティックなどを含む。スイッチ15は、リモコンスイッチであってもよく、表示画面周辺に設けられたスイッチであってもよい。16は、音声出力回路111から出力される音声信号を音声として出力するスピーカである。
【0012】
制御装置100のメモリ102は、制御プログラムを格納するROM、作業エリアのRAM、および、各種設定値などを記憶する不揮発メモリを含むメモリである。CPU101は、メモリ102にアクセスして制御プログラムを実行し、各種の制御を行う。パラレルI/O103は、スイッチ15を構成する個別のスイッチ等が接続されるパラレルI/Oポートである。A/D変換器104は、ジャイロセンサ11aのアナログ信号をA/D変換する変換器である。シリアルI/O105は、GPSセンサ11cからのシリアル信号を受信するシリアルI/Oポートである。カウンタ106は、たとえば車軸の回転に伴って車速センサ11dから出力されるパルス信号をカウントするカウンタである。
【0013】
グラフィックコントローラ107は、CPU101から出力される表示データを、画像データとして画像メモリ(ビデオRAM)であるメモリ108に格納し、メモリ108に格納された画像データを表示モニタ14に表示するための制御を行う。CPU101から出力される表示データは、各種の文字データや道路地図などの各種の図形データなどから成る。制御装置100は、表示モニタ14の表示制御装置として機能する。
【0014】
地図記憶装置109は、ナビゲーション処理に使用する道路地図データやPOI情報(Point of Interest 観光地や各種施設の情報)など各種の情報を格納する地図記憶装置であり、ハードディスク装置が用いられている。なお、地図記憶装置109は、ハードディスク装置以外にも、道路地図データが格納されたCD−ROMやDVD、その他の記録媒体、および、その読み出し装置であってもよい。
【0015】
なお、道路地図データは、地図に関する情報であり、地図表示用データ、経路探索用データ、誘導データ(交差点名称・道路名称・方面名称・方向ガイド・施設情報など)などから成る。地図表示用データは道路や道路地図の背景を表示するためのデータである。経路探索用データは、道路形状とは直接関係しない分岐情報などから成るデータであり、主に推奨経路を演算(経路探索)する際に用いられる。誘導データは、交差点の名称などから成るデータであり、演算された推奨経路に基づき運転者等に推奨経路を誘導する際に用いられる。道路地図データは、道路をノードとリンクで表現したデータであり、交差点にノードが対応し、各ノード間を結ぶ線分がリンクに対応する。
【0016】
I/F110は、後述する受信機20を接続するためのインターフェースである。受信機20は、後述する路側のビーコン装置32から送信される交通情報(VICS(登録商標)情報)等をアンテナ21を介して受信する受信機である。
【0017】
なお、ビーコン装置32は、VICS(Vehicle Information and Communication System)センタに設けられた管理サーバ30からの安全運転支援情報や道路交通情報等の各種情報を無線アンテナ31を介して受信機20に送信する。
【0018】
このように構成されるカーナビゲーション装置1は、現在地検出装置11により取得した情報および地図記憶装置109に格納されている道路地図データに基づき各種のナビゲーションを行う。たとえば、制御装置100のCPU101は、現在地検出装置11により取得した情報および地図記憶装置109に格納されている道路地図データに基づき、自車位置を算出する。このとき、CPU101は、公知のマップマッチングの手法により、自車位置を道路地図データのリンク上に設定する。そして、CPU101は、算出した自車位置近辺の道路地図および自車位置を表示モニタ14に表示するよう各部を制御する。また、CPU101は、経路探索によって得られた経路(推奨経路)に沿ってドライバを誘導するように各部を制御する。
【0019】
CPU101は、誤差やノイズを含む現在地検出装置11の各センサの出力を用いて刻々と変化する自車位置を算出する。自車位置算出の過程で、たとえば公知のカルマンフィルタが用いられ、算出される自車位置の誤差(以下、誤差Ecと表す)の推定が可能となる。
【0020】
−−−自車位置の補正について−−−
近年、たとえば「神奈川県DSSS・SKYプロジェクト」における出会い頭の事故防止の対策として、路側のビーコン装置32から車両に対して、車両の前方に一時停止をしなければならない箇所があることを通知すること等が行われている。たとえば「神奈川県DSSS・SKYプロジェクト」では、道路上の一時停止線(停止線)までの距離の情報を路側のビーコン装置32から車両に対して送信することも行われている。また、車両側では、受信した停止線までの距離の情報に基づいて、停止線の手前で車両が停止するように制御することも行われている。
【0021】
ここで、当該停止線の位置(絶対位置)が分かれば、当該停止線の位置と、当該停止線までの距離(車両に対する停止線の相対位置)の情報とに基づいて、自車位置の算出精度を高めることが考えられる。しかし、道路地図データに停止線の位置の情報やビーコン装置32の設置位置の情報がない場合には、受信した停止線までの距離の情報だけでは自車位置を算出できない。
【0022】
そこで、本実施の形態では、次のようにして当該停止線の位置(絶対位置)を推定する。そして、推定した当該停止線の位置の誤差が上述した自車位置の算出誤差よりも小さいときには、当該停止線の位置と、当該停止線までの距離の情報とに基づいて、自車位置を補正する。
【0023】
CPU101は、停止線の位置を次のようにして推定する。なお、受信した停止線までの距離の情報には、当該情報を車両が受信する位置から当該停止線までの距離Laが含まれているものとする。CPU101は、受信機20で停止線までの距離の情報を受信すると、自車位置の存在する(車両が走行している)道路(以下、走行道路と呼ぶ)と自車位置の前方で交差する道路(以下、交差道路と呼ぶ)についての、幅員数、道幅、道路種別の情報を道路地図データから取得する。すなわち、CPU101は、走行道路と交差道路との交差点のノードに含まれる情報から、幅員数、道幅、道路種別の情報を取得する。そして、CPU101は、取得した情報から、上記交差点のノードから交差道路の自車位置側の路側までの距離W1を算出する。具体的には、CPU101は、次のようにして、距離W1を算出する。
【0024】
たとえば、図2に示すようなT字路の交差点を例に説明する。図2において、150は交差道路であり、151は交差点のノードであり、152は交差道路150の自車位置側の路側である。160は走行道路であり、161は停止線であり、170は車両(自車)である。たとえば、「交差点のノード151が上り車線のノードであり、車線数が3車線であり、道幅が3mである」という情報を取得した場合、CPU101は、交差点のノード151が3車線のうちの中央の車線の中心に存在するものと判断して、交差点のノード151から交差道路150の自車位置側の路側152までの距離W1が(3m)×(3車線/2)=4.5mであると算出する。
【0025】
また、CPU101は、交差道路150の自車位置側の路側152から、走行道路160上の停止線161までの距離L1を推定する。ここで、たとえば距離L1が1mの固定された値にあらかじめ設定されているものとする。この場合、距離L1が1mであるという情報が制御装置100のメモリ102のうち各種設定値などを記憶する不揮発メモリに格納されている。CPU101は、当該不揮発メモリに格納されている距離L1の情報を読み込むことで、距離L1の値を得る。
【0026】
距離W1と距離L1との和が、交差点のノード151から停止線161までの距離Lbであると推定される。したがって、停止線161の位置と、停止線161までの距離の情報(すなわち距離Laについての情報)とに基づいて算出される自車位置は、外部から取得した停止線までの距離Laと上記のように推定した距離Lbとの和(La+Lb)だけ交差点のノード151から走行道路160のリンクに沿って手前の位置となる。
【0027】
なお、上述のようにして距離W1を算出する際、交差道路150の歩道の有無、および歩道の道幅を考慮していない。また、停止線161は、たとえば、交差道路150から走行道路160へ侵入する車両の内輪差を考慮して、走行道路160の道幅が狭い場合や、交差道路150と走行道路160との交差角度が小さい場合などでは、交差点から離れた位置に設けられることが考えられる。そのため、上述のようにして算出した交差点のノード151から停止線161までの距離Lbには、数m(たとえば2m程度)の誤差Eがあるものと考えられる。
【0028】
そこで、本実施の形態では、算出される自車位置の誤差Ecの推定値が、上記誤差Eよりも大きい場合に限って、停止線までの距離Laと上記距離Lbとの和(La+Lb)だけ交差点のノード151から走行道路160のリンクに沿って手前の位置を自車位置とする。すなわち、算出される自車位置の誤差Ecの推定値が、上記誤差Eよりも大きい場合に限って、現在地検出装置11により取得した情報および地図記憶装置109に格納されている道路地図データに基づいて算出した自車位置を、停止線の位置と、停止線までの距離の情報とに基づいて算出される自車位置で補正する。
【0029】
なお、本実施の形態では、たとえば誤差Eが2mの固定された値にあらかじめ設定されているものとする。この場合、誤差Eが2mであるという情報が制御装置100のメモリ102のうち各種設定値などを記憶する不揮発メモリに格納されている。CPU101は、当該不揮発メモリに格納されている誤差Eの情報を読み込むことで、誤差Eの値を得る。
【0030】
−−−フローチャート−−−
図3は、車両の現在位置を算出して表示モニタ14上に表示する処理の動作を示したフローチャートである。車両の不図示のイグニッションキーにより不図示のアクセサリスイッチがオン(ACC ON)されると、カーナビゲーション装置1の電源がオンされて、図3に示す処理を行うプログラムが起動されてCPU101で実行される。ステップS1において、現在地検出装置11からの各情報や、道路地図データなどを読み込んでステップS3へ進む。
【0031】
ステップS3において、ステップS1で読み込んだ現在地検出装置11からの各情報に基づいて自車位置を算出する。なお、ステップS3における自車位置算出処理は、従来の現在位置算出処理と同様であり公知であるため、説明を省略する。また、自車位置算出に際し、自車位置の誤差Ecの推定が可能であることは、上述のとおりである。
【0032】
ステップS5において、ビーコン装置32から停止線までの距離の情報を受信したか否かを判断する。ステップS5が肯定判断されるとステップS7へ進み、走行道路160と交差道路150との交差点151のノードに含まれる情報から、幅員数、道幅、道路種別の情報を取得してステップS9へ進む。ステップS9において、ステップS7で取得した幅員数、道幅、道路種別の情報から、交差点のノード151から交差道路150の自車位置側の路側152までの距離W1を算出してステップS11へ進む。
【0033】
ステップS11において、交差道路150の自車位置側の路側152から、走行道路160上の停止線161までの距離L1を推定する。上述したように、本実施の形態では、ステップS11において、たとえば制御装置100のメモリ102から距離L1の情報を読み込むことで、距離L1の値を得る。
【0034】
ステップS11が実行されるとステップS13へ進み、ステップS9で算出した距離W1と、ステップS11で推定した距離L1との和である、交差点のノード151から停止線161までの距離Lbを算出してステップS15へ進む。ステップS15において、交差点のノード151から停止線161までの距離Lbの誤差Eを推定する。上述したように、本実施の形態では、ステップS15において、たとえば制御装置100のメモリ102から誤差Eの情報を読み込むことで、誤差Eの値を得る。
【0035】
ステップS15が実行されるとステップS17へ進み、ステップS3で算出される自車位置の誤差Ecを推定してステップS19へ進む。ステップS19において、ステップS15で推定した距離Lbの誤差EよりもステップS17で推定した自車位置の誤差Ecの推定値が大きいか否かを判断する。ステップS19が肯定判断されるとステップS21へ進み、ステップS5で受信した停止線までの距離の情報から得られる距離Laと、ステップS13で算出した距離Lbとの和を算出してステップS23へ進む。
【0036】
ステップS23において、ステップS3で算出した自車位置に代えて、交差点のノード151の位置からステップS21で算出した距離Laと距離Lbとの和(La+Lb)だけ手前の位置を新たな自車位置として設定して(すなわち自車位置を補正して)ステップS25へ進む。ステップS25において、算出または補正された自車位置に基づいて、表示モニタ14に表示された地図上に車両の現在位置を示すカーマークを重畳表示するよう各部を制御してステップS27へ進む。
【0037】
ステップS27において、不図示のイグニッションスイッチがオフされたか否かを判断する。ステップS27が肯定判断されると、本プログラムを終了する。ステップS27が否定判断されると、ステップS1へ戻る。
【0038】
ステップS19が否定判断されると、ステップS25へ進む。ステップS5が否定判断されると、ステップS25へ進む。
【0039】
本実施の形態のカーナビゲーション装置1では、次の作用効果を奏する。
(1) 車両前方の停止線までの距離の情報を路側のビーコン装置32から受信すると、当該停止線の位置を推定するように構成した。そして、当該停止線までの距離の情報と当該停止線の位置とに基づいて、自車位置を補正するように構成した。これにより、簡単な演算処理によって自車位置の算出精度を向上できる。また、ハードウェアの構成で特に機器を追加しなくても、ソフトウェア的な処理だけで自車位置の算出精度を向上でき、コストアップを抑制できる。
【0040】
(2) 自車位置の誤差Ecの推定値が、交差点のノード151から停止線161までの距離Lbの誤差Eよりも大きい場合に限って、停止線までの距離Laと上記距離Lbとの和(La+Lb)だけ交差点のノード151より手前の位置を自車位置とするように構成した。これにより、補正によって自車位置の精度向上が見込める場合にだけ自車位置が補正されるため、補正によって逆に自車位置の精度を劣化させてしまうおそれがない。
【0041】
(3) 車両前方の停止線までの距離の情報を路側のビーコン装置32から受信すると、当該ビーコン装置32の位置ではなく、当該停止線の位置を推定するように構成した。走行道路160と交差道路150との交差点のノード151に従来から含まれる情報を利用することで当該停止線の位置を推定できるので、道路地図データに停止線の位置の情報やビーコン装置32の設置位置の情報がない場合でも、道路地図データに新たな情報を付加することなく、当該停止線の位置を推定できる。したがって、コストアップを抑制できる。
【0042】
(4) 路側のビーコン装置32から送信される車両前方の停止線までの距離の情報を利用するようにしたので、既存のインフラおよび当該インフラから提供される情報に手を加える必要がなく、本発明によるカーナビゲーション装置1を普及させ易い。
【0043】
−−−第2の実施の形態−−−
図4〜6を参照して、本発明によるカーナビゲーション装置の第2の実施の形態を説明する。以下の説明では、第1の実施の形態と同じ構成要素には同じ符号を付して相違点を主に説明する。特に説明しない点については、第1の実施の形態と同じである。本実施の形態では、主に、車車間通信によって得られる他車の位置の情報に基づいて自車位置の算出精度を向上させる点で、第1の実施の形態と異なる。
【0044】
図4は、第2の実施の形態のカーナビゲーション装置1の構成を示す図である。カーナビゲーション装置1は、送受信機22とインターフェース(I/F)112とを備えている。送受信機22は、他の車両との間でアンテナ23を介して車車間通信を行うための送受信機である。I/F110は、カメラ12を接続するためのインターフェースである。カメラ12は、たとえば、あらかじめ車両に搭載されている車間距離検出用途などのカメラであってもよく、本実施の形態のカーナビゲーション装置1のために設けたカメラであってもよい。なお、180は他の車両であり、40は他の車両180に搭載されているカーナビゲーション装置であり、41は他の車両180以外の車両との間でアンテナ42を介して車車間通信を行うための送受信機である。
【0045】
−−−自車位置の補正について−−−
本実施の形態では、車車間通信によって他の車両180から他の車両180の現在位置の情報、現在位置の誤差の情報、および自動車登録番号(すなわち自動車用ナンバープレートのナンバー)の情報が送信されているものとする。本実施の形態では、他の車両180から車車間通信によって送信されたこれらの情報を取得するとともに、カメラ12で撮像して得られた画像に基づいて、自車に対する他の車両180の位置関係(すなわち相対位置を表す方位(方向)と距離)、および、自動車登録番号標(自動車用ナンバープレート)に記載された自動車登録番号(自動車用ナンバープレートのナンバー)を検出する。そして、車車間通信で取得した他の車両180の自動車登録番号とカメラ12で撮像して得られた画像に基づいて検出された自動車登録番号とが一致し、かつ、車車間通信で取得した他の車両180の現在位置の誤差が自車位置の誤差よりも小さい場合に、車車間通信で取得した他の車両180の現在位置の情報および画像処理によって検出した他の車両180との位置関係(相対位置)に基づいて、自車位置を補正する。
【0046】
具体的には、CPU101は、送受信機22を介して車車間通信により他の車両180の現在位置の情報、現在位置の情報の誤差Edの情報および自動車登録番号の情報を取得する。また、CPU101は、カメラ12で撮像して得られた画像に対して公知の画像処理を行うことで、カメラ12の撮像範囲内に他の車両が存在するか否かを判断する。カメラ12の撮像範囲内に他の車両が存在する場合には、CPU101は、他の車両が存在する方向(たとえば図5に示した自車の前方からのずれ角度θd)、他の車両までの距離Ld、および、自動車登録番号標に記載された自動車登録番号を検出する。そして、CPU101は、車車間通信で取得した他の車両180の自動車登録番号とカメラ12で撮像して得られた画像に基づいて検出された自動車登録番号とが一致し、かつ、車車間通信で取得した他の車両180の現在位置の誤差Edが自車位置の誤差Ecよりも小さいか否かを判断する。当該判断が肯定判断されると、CPU101は、現在地検出装置11により取得した情報および地図記憶装置109に格納されている道路地図データに基づいて算出した自車位置を、車車間通信で取得した他の車両180の現在位置と、画像処理によって得られた他の車両が存在する方向(ずれ角度θd)および他の車両までの距離Ldとによって算出される自車位置で置き換える。
【0047】
−−−フローチャート−−−
図6は、本実施に形態における、車両の現在位置を算出して表示モニタ14上に表示する処理の動作を示したフローチャートである。車両の不図示のイグニッションキーにより不図示のアクセサリスイッチがオン(ACC ON)されると、カーナビゲーション装置1の電源がオンされて、図6に示す処理を行うプログラムが起動されてCPU101で実行される。ステップS1およびステップS3は、上述した第1の実施の形態における図3に示したステップS1およびステップS3の動作と同じである。
【0048】
ステップS3が実行されるとステップS31へ進み、送受信機22を介して車車間通信により他の車両180の現在位置の情報、現在位置の情報の誤差Edの情報および自動車登録番号の情報を取得したか否かを判断する。ステップS31が否定判断されるとステップS25へ進む。なお、ステップS25以降の動作については、上述した第1の実施の形態における図3に示したステップS25以降の動作と同じである。ステップS31が肯定判断されるとステップS33へ進み、カメラ12で撮像して得られた画像を取得してステップS35へ進む。
【0049】
ステップS35において、ステップS33で取得した画像に公知の画像処理を行うことで他の車両の画像を抽出してステップS37へ進む。ステップS37において、ステップS35における画像処理によって他の車両の画像が抽出できたか否か、すなわち、他の車両がカメラ12の撮像範囲内に存在していたか否かを判断する。ステップS37が否定判断されるとステップS25へ進む。ステップS37が肯定判断されるとステップS39へ進み、画像処理の結果から他の車両が存在する方向(ずれ角度θd)および他の車両までの距離Ldを算出してステップS41へ進む。
【0050】
ステップS41において、画像処理の結果から他の車両の自動車登録番号を検出してステップS17へ進む。ステップS17は、上述した第1の実施の形態における図3に示したステップS17の動作と同じである。ステップS17が実行されるとステップS43へ進み、ステップS31で取得した他の車両180の自動車登録番号とステップS41で検出した自動車登録番号とが一致し、かつ、ステップS31で取得した他の車両180の現在位置の誤差EdがステップS17で推定した自車位置の誤差Ecよりも小さいか否かを判断する。
【0051】
ステップS43が否定判断されるとステップS25へ進む。ステップS43が肯定判断されるとステップS45へ進み、ステップS31で取得した他の車両180の現在位置の情報と、ステップS39で算出したずれ角度θdおよび距離Ldに基づいて自車位置を算出してステップS47へ進む。ステップS47において、ステップS3で算出した自車位置をステップS47で算出した自車位置で置き換えてステップS25へ進む。
【0052】
第2の実施の形態のカーナビゲーション装置1では、第1の実施の形態における作用効果に加えて、次の作用効果を奏する。
(1) 車車間通信で取得した他の車両180の現在位置の情報および画像処理によって検出した他の車両180の位置関係に基づいて、自車位置を補正するように構成した。これにより、第1の実施の形態に比べて、自車位置補正の機会が増えるので、高い自車位置の算出精度を維持できる。
【0053】
(2) 自車位置の誤差Ecの推定値が、車車間通信で取得した他の車両180の現在位置の誤差Edよりも大きい場合に限って、自車位置を補正するように構成した。これにより、補正によって自車位置の精度向上が見込める場合にだけ自車位置が補正されるため、補正によって逆に自車位置の精度を劣化させてしまうおそれがない。
【0054】
(3) 車車間通信で取得した他の車両180の自動車登録番号とカメラ12で撮像して得られた画像に基づいて検出された自動車登録番号とが一致した場合に限って、自車位置を補正するように構成した。これにより、周囲に他の車両が複数存在する場合であっても、車車間通信で情報を取得した他の車両と、カメラ12で撮像して得られた画像から自車との相対位置を算出する対象となった他の車両とが一致しないまま自車位置の補正を行ってしまうおそれがない。
【0055】
−−−変形例−−−
(1) 上述した第1の実施の形態では、自車位置を補正する際に、停止線を表す道路表示の表示位置を推定するように構成したが、本発明はこれに限定されない。停止線を表す道路表示の表示位置に代えて、たとえば、道路同士の合流部の位置、登坂車線の終了部分の位置、道路の勾配が上り勾配から下り勾配に変化する地点の位置、道路の勾配が下り勾配から上り勾配に変化する地点の位置を推定するように構成してもよい。
【0056】
(2) 上述した第1の実施の形態において、車両から停止線までの距離の誤差(たとえばビーコン装置32からの情報を受信する位置の誤差)を加味してもよい。
(3) 上述した第1の実施の形態において、停止線の推定位置の誤差がそれほど大きくなるとは考えられないため、交差点のノード151から停止線161までの距離Lbの誤差Eに関わらず、自車位置を補正するように構成してもよい。
【0057】
(4) 上述した第2の実施の形態において、カメラ12で撮像して得られた画像に基づいて自車に対する位置関係が算出できるのであれば、自車位置の補正のために現在位置の情報を利用する他の車両180は前走車である必要がない。
(5) 上述した第2の実施の形態において、自車に対する相対位置が算出(検出)できる装置であれば、カメラ12に代えてミリ波レーダ等を用いてもよい。
(6) 上述した各実施の形態および変形例は、それぞれ組み合わせてもよい。
【0058】
なお、本発明は、上述した実施の形態のものに何ら限定されず、自車両の位置(自車位置)を検出する自車位置検出手段と、自車両と対象物との距離を外部から受信する距離情報受信手段と、道路地図データに基づいて対象物の位置を推定する対象物位置推定手段と、距離情報受信手段で受信した距離と、対象物位置推定手段で推定した対象物の位置とに基づいて、自車位置検出手段で検出した自車位置を補正する自車位置補正手段とを備えることを特徴とする各種構造のカーナビゲーション装置を含むものである。
また、本発明は、上述した実施の形態のものに何ら限定されず、自車位置を検出する自車位置検出手段と、他車両の位置を受信する他車両位置情報受信手段と、自車両から他車両までの距離及び方位を検出する位置関係検出手段と、他車両位置情報受信手段で受信した他車両の位置と、位置関係検出で検出した自車両から他車両までの距離及び方位とに基づいて、自車位置検出手段で検出した自車位置を補正する自車位置補正手段とを備えることを特徴とする各種構造のカーナビゲーション装置を含むものである。
【符号の説明】
【0059】
1 カーナビゲーション装置 11 現在地検出装置
12 カメラ 20 受信機
22 送受信機 32 ビーコン装置
101 CPU 170 車両(自車)
180 他の車両
【特許請求の範囲】
【請求項1】
自車両の位置である自車位置を検出する自車位置検出手段と、
前記自車両と対象物との距離を外部から受信する距離情報受信手段と、
道路地図データに基づいて前記対象物の位置を推定する対象物位置推定手段と、
前記距離情報受信手段で受信した前記距離と、前記対象物位置推定手段で推定した前記対象物の位置とに基づいて、前記自車位置検出手段で検出した前記自車位置を補正する自車位置補正手段とを備えることを特徴とするカーナビゲーション装置。
【請求項2】
請求項1に記載のカーナビゲーション装置において、
前記自車位置検出手段で検出した前記自車位置の誤差を算出する自車位置誤差算出手段と、
前記対象物位置推定手段で推定した前記対象物の位置の誤差を算出する対象物位置誤差算出手段とをさらに備え、
前記自車位置補正手段は、前記対象物位置誤差算出手段で算出した前記対象物の位置の誤差が前記自車位置誤差算出手段で算出した前記自車位置の誤差よりも小さい場合に、前記距離情報受信手段で受信した前記距離と、前記対象物位置推定手段で推定した前記対象物の位置とに基づいて、前記自車位置検出手段で検出した前記自車位置を補正することを特徴とするカーナビゲーション装置。
【請求項3】
請求項1または請求項2に記載のカーナビゲーション装置において、
前記対象物の位置は、停止線を表す道路表示の表示位置、道路同士の合流部の位置、登坂車線の終了部分の位置、道路の勾配が上り勾配から下り勾配に変化する地点の位置、道路の勾配が下り勾配から上り勾配に変化する地点の位置の少なくともいずれか一つであることを特徴とするカーナビゲーション装置。
【請求項4】
請求項3に記載のカーナビゲーション装置において、
前記対象物位置推定手段は、前記対象物が自車両が走行する道路である走行道路と交差点で交差する道路である交差道路の手前で、前記走行道路に設けられた前記交差点の手前の停止線である場合、道路地図データに含まれる前記交差点を表すノードの情報から幅員数、道幅、道路種別の情報を取得して前記ノードから前記交差道路の自車位置側の路側までの距離W1を算出し、前記交差道路の自車位置側の路側から前記停止線までの距離L1を推定し、前記ノードの位置から前記距離W1と前記距離L1と前記距離情報受信手段で受信した前記距離との和だけ前記走行道路のノードに沿って自車両側の位置を自車位置として補正することを特徴とするカーナビゲーション装置。
【請求項5】
請求項1〜4のいずれか一項に記載のカーナビゲーション装置において、
前記距離情報受信手段は、少なくとも光ビーコンまたは狭域通信用路側機器から前記距離を受信可能であることを特徴とするカーナビゲーション装置。
【請求項6】
自車位置を検出する自車位置検出手段と、
他車両の位置を受信する他車両位置情報受信手段と、
自車両から前記他車両までの距離及び方位を検出する位置関係検出手段と、
前記他車両位置情報受信手段で受信した前記他車両の位置と、前記位置関係検出で検出した自車両から前記他車両までの距離及び方位とに基づいて、前記自車位置検出手段で検出した前記自車位置を補正する自車位置補正手段とを備えることを特徴とするカーナビゲーション装置。
【請求項7】
請求項6に記載のカーナビゲーション装置において、
前記自車位置検出手段で算出した前記自車位置の誤差を算出する自車位置誤差算出手段と、
前記他車両の位置の誤差の情報を受信する他車両位置誤差情報受信手段とをさらに備え、
前記自車位置補正手段は、前記他車両位置誤差情報受信手段で受信した情報に基づく前記他車両の位置の誤差が前記自車位置誤差算出手段で算出した前記自車位置の誤差よりも小さい場合に、前記他車両位置情報受信手段で受信した前記他車両の位置と、前記位置関係検出で検出した自車両から前記他車両までの距離及び方位とに基づいて、前記自車位置検出手段で検出した前記自車位置を補正することを特徴とするカーナビゲーション装置。
【請求項1】
自車両の位置である自車位置を検出する自車位置検出手段と、
前記自車両と対象物との距離を外部から受信する距離情報受信手段と、
道路地図データに基づいて前記対象物の位置を推定する対象物位置推定手段と、
前記距離情報受信手段で受信した前記距離と、前記対象物位置推定手段で推定した前記対象物の位置とに基づいて、前記自車位置検出手段で検出した前記自車位置を補正する自車位置補正手段とを備えることを特徴とするカーナビゲーション装置。
【請求項2】
請求項1に記載のカーナビゲーション装置において、
前記自車位置検出手段で検出した前記自車位置の誤差を算出する自車位置誤差算出手段と、
前記対象物位置推定手段で推定した前記対象物の位置の誤差を算出する対象物位置誤差算出手段とをさらに備え、
前記自車位置補正手段は、前記対象物位置誤差算出手段で算出した前記対象物の位置の誤差が前記自車位置誤差算出手段で算出した前記自車位置の誤差よりも小さい場合に、前記距離情報受信手段で受信した前記距離と、前記対象物位置推定手段で推定した前記対象物の位置とに基づいて、前記自車位置検出手段で検出した前記自車位置を補正することを特徴とするカーナビゲーション装置。
【請求項3】
請求項1または請求項2に記載のカーナビゲーション装置において、
前記対象物の位置は、停止線を表す道路表示の表示位置、道路同士の合流部の位置、登坂車線の終了部分の位置、道路の勾配が上り勾配から下り勾配に変化する地点の位置、道路の勾配が下り勾配から上り勾配に変化する地点の位置の少なくともいずれか一つであることを特徴とするカーナビゲーション装置。
【請求項4】
請求項3に記載のカーナビゲーション装置において、
前記対象物位置推定手段は、前記対象物が自車両が走行する道路である走行道路と交差点で交差する道路である交差道路の手前で、前記走行道路に設けられた前記交差点の手前の停止線である場合、道路地図データに含まれる前記交差点を表すノードの情報から幅員数、道幅、道路種別の情報を取得して前記ノードから前記交差道路の自車位置側の路側までの距離W1を算出し、前記交差道路の自車位置側の路側から前記停止線までの距離L1を推定し、前記ノードの位置から前記距離W1と前記距離L1と前記距離情報受信手段で受信した前記距離との和だけ前記走行道路のノードに沿って自車両側の位置を自車位置として補正することを特徴とするカーナビゲーション装置。
【請求項5】
請求項1〜4のいずれか一項に記載のカーナビゲーション装置において、
前記距離情報受信手段は、少なくとも光ビーコンまたは狭域通信用路側機器から前記距離を受信可能であることを特徴とするカーナビゲーション装置。
【請求項6】
自車位置を検出する自車位置検出手段と、
他車両の位置を受信する他車両位置情報受信手段と、
自車両から前記他車両までの距離及び方位を検出する位置関係検出手段と、
前記他車両位置情報受信手段で受信した前記他車両の位置と、前記位置関係検出で検出した自車両から前記他車両までの距離及び方位とに基づいて、前記自車位置検出手段で検出した前記自車位置を補正する自車位置補正手段とを備えることを特徴とするカーナビゲーション装置。
【請求項7】
請求項6に記載のカーナビゲーション装置において、
前記自車位置検出手段で算出した前記自車位置の誤差を算出する自車位置誤差算出手段と、
前記他車両の位置の誤差の情報を受信する他車両位置誤差情報受信手段とをさらに備え、
前記自車位置補正手段は、前記他車両位置誤差情報受信手段で受信した情報に基づく前記他車両の位置の誤差が前記自車位置誤差算出手段で算出した前記自車位置の誤差よりも小さい場合に、前記他車両位置情報受信手段で受信した前記他車両の位置と、前記位置関係検出で検出した自車両から前記他車両までの距離及び方位とに基づいて、前記自車位置検出手段で検出した前記自車位置を補正することを特徴とするカーナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−112691(P2012−112691A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−259905(P2010−259905)
【出願日】平成22年11月22日(2010.11.22)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月22日(2010.11.22)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]