
データ解析装置、データ解析方法、及びプログラム
【課題】電柱などの円柱形状の地物を高精度に自動的に検出する。
【解決手段】部分空間設定手段20は対象空間を垂直面で分割して、柱状の複数の部分空間を設定する。部分空間選択手段22は部分空間のうち目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する。壁面探索手段26は注目部分空間の水平面内における線分のうち、当該水平面に射影された点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する。円柱面探索手段28は点群のうち壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、目的地物の円柱面の位置を探索する。
【解決手段】部分空間設定手段20は対象空間を垂直面で分割して、柱状の複数の部分空間を設定する。部分空間選択手段22は部分空間のうち目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する。壁面探索手段26は注目部分空間の水平面内における線分のうち、当該水平面に射影された点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する。円柱面探索手段28は点群のうち壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、目的地物の円柱面の位置を探索する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地物表面の三次元形状を表す点群データに基づいて円柱形状の地物を検出するデータ解析装置、データ解析方法、及びプログラムに関する。
【背景技術】
【0002】
特許文献1には、レーザスキャナを用いて、地物の形状を表す三次元点群データを取得する技術が示されている。例えば、モービルマッピングシステムでは、レーザスキャナは自動車の上部に搭載され、周囲にレーザを照射する。レーザの光軸は仰俯角及び方位角を変えることにより垂直方向及び水平方向に走査され、走査範囲内にて微小角度ごとにレーザパルスが発射される。レーザの発射から反射光の受信までの時間に基づいて距離が計測され、またその際、レーザの発射方向、時刻、及び車体の位置・姿勢などが計測される。車体の位置・姿勢の計測は例えば、GPS/IMU(Global Positioning System:全地球測位システム、Inertial Measurement Unit:慣性計測装置)を用いて行われる。このようにして得られた計測データから、レーザパルスを反射した点の三次元座標を表す点群データが求められる。
【0003】
また、点群データの取得と同時に、カメラを用いて映像が撮影される。画像はデータ解析にてユーザが計測対象部分を指定する際に利用することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−204615号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来、点群データをもとに電柱などの円柱形状の地物やその他の地物を判読するためには人手を要しており、三次元CADで編集ツール等を利用して手作業で地物の抽出作業が行われていた。
【0006】
本発明は、地物表面の三次元形状を表す点群データに基づいて円柱形状の地物を自動的に検出するデータ解析装置、データ解析方法、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係るデータ解析装置は、対象空間における地物表面の三次元形状を表す点群データに基づいて、円柱形状を有する目的地物を検出するものであって、前記対象空間を垂直面で分割して、柱状の複数の部分空間を設定する部分空間設定手段と、前記部分空間のうち前記目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する部分空間選択手段と、前記注目部分空間の水平面内における線分のうち、当該水平面に射影された前記点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する壁面探索手段と、前記点群のうち前記壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、前記目的地物の円柱面の位置を探索する円柱面探索手段と、を有する。
【0008】
他の本発明に係るデータ解析装置は、前記注目部分空間を分割して、縦に積み重なる複数のブロック空間を設定するブロック空間設定手段を有し、前記壁面探索手段は、前記ブロック空間ごとに壁面位置を探索し、前記円柱面探索手段は、前記壁面位置が検出されなかった前記ブロック空間内の前記点群を前記残余点群として前記円柱面の位置を探索する。
【0009】
別の本発明に係るデータ解析装置においては、前記壁面探索手段は、前記ブロック空間に隣接する空間における前記点群集中線分であって、当該ブロック空間にて検出された前記点群集中線分に連なる連接線分を探索し、当該連接線分が存在する場合に、当該ブロック空間の前記点群集中線分を前記壁面位置と推定する。
【0010】
別の本発明に係るデータ解析装置は、さらに、前記ブロック空間にて前記円柱面の位置が検出された場合に、当該ブロック空間に対応する高さに位置し、かつ前記目的地物の水平断面を包含する大きさの水平断面を有する柱状の再探索空間を、当該円柱面の中心軸を中心として設定する再探索空間設定手段と、前記再探索空間内の前記点群の前記水平面内での分布に基づいて当該円柱面の位置を求め、前記点群のうち当該円柱面の表面上に存在する円柱面点群を抽出する円柱面再探索手段と、を有する。
【0011】
別の本発明に係るデータ解析装置は、さらに前記ブロック空間に対応して抽出された前記円柱面点群に基づいて、前記円柱面の三次元形状を求める円柱形状決定手段を有する。
【0012】
本発明に係るデータ解析方法は、対象空間における地物表面の三次元形状を表す点群データに基づいて、円柱形状を有する目的地物を検出する方法であって、前記対象空間を垂直面で分割して、柱状の複数の部分空間を設定する部分空間設定ステップと、前記部分空間のうち前記目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する部分空間選択ステップと、前記注目部分空間の水平面内における線分のうち、当該水平面に射影された前記点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する壁面探索ステップと、前記点群のうち前記壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、前記目的地物の円柱面の位置を探索する円柱面探索ステップと、を有する。
【0013】
本発明に係るプログラムは、コンピュータに、対象空間における地物表面の三次元形状を表す点群データに基づいて、円柱形状を有する目的地物を検出する処理を行わせるためのプログラムであって、当該コンピュータを、前記対象空間を垂直面で分割して、柱状の複数の部分空間を設定する部分空間設定手段、前記部分空間のうち前記目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する部分空間選択手段、前記注目部分空間の水平面内における線分のうち、当該水平面に射影された前記点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する壁面探索手段、及び前記点群のうち前記壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、前記目的地物の円柱面の位置を探索する円柱面探索手段、として機能させる。
【発明の効果】
【0014】
本発明によれば、地物表面の三次元形状を表す点群データに基づいて円柱形状の地物を自動的に検出することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施形態に係る電柱抽出システムの概略の構成を示すブロック図である。
【図2】本発明の実施形態に係る電柱抽出システムによる電柱抽出処理の概略のフロー図である。
【図3】電柱検索処理の概略のフロー図である。
【図4】電柱検索処理の概略のフロー図である。
【図5】壁面判定処理の概略のフロー図である。
【図6】壁面判定処理の概略のフロー図である。
【図7】ブロック空間内での壁面を検出する処理を説明する模式図である。
【図8】電柱抽出処理の概略のフロー図である。
【図9】再探索空間の一例を示す模式図である。
【図10】電柱形状の登録処理の概略のフロー図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態(以下実施形態という)である電柱抽出システム2について、図面に基づいて説明する。本システムは、地物表面の三次元形状を表す点群データに基づいて円柱形状の地物である電柱を検出するデータ解析装置である。本システムは地表面に略垂直な地物表面において電柱に対応する半径を有する円柱面と、当該円柱面に比べて平坦な壁面とを分離して電柱を抽出する。点群データは例えば、上述のモービルマッピングシステムのように地上を走行する車両に搭載されたレーザスキャナにより取得される。また、レーザスキャナを地上に設置して計測を行っても良い。点群データが地物表面の三次元形状を表すには、地物表面の凹凸のスケールに応じた点密度でレーザスキャンが行われる必要がある。この点、車両や三脚を用いて道路等の地上から行うレーザスキャンは、例えば、道路の近傍に建つ電柱の円柱面及び、建物などの壁面の形状を捉えることができる程度の走査密度を実現できる。
【0017】
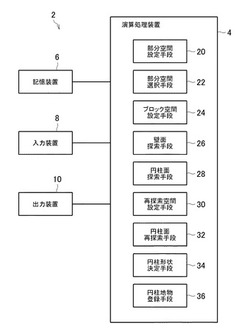
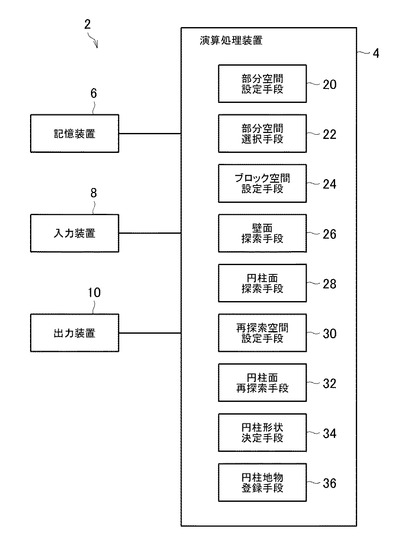
図1は、電柱抽出システム2の概略の構成を示すブロック図である。本システムは、演算処理装置4、記憶装置6、入力装置8及び出力装置10を含んで構成される。演算処理装置4として、本システムの各種演算処理を行う専用のハードウェアを作ることも可能であるが、本実施形態では演算処理装置4は、コンピュータ及び、当該コンピュータ上で実行されるプログラムを用いて構築される。
【0018】
当該コンピュータのCPU(Central Processing Unit)が演算処理装置4を構成し、後述する部分空間設定手段20、部分空間選択手段22、ブロック空間設定手段24、壁面探索手段26、円柱面探索手段28、再探索空間設定手段30、円柱面再探索手段32、円柱形状決定手段34、及び円柱地物登録手段36として機能する。
【0019】
記憶装置6はコンピュータに内蔵されるハードディスクなどで構成される。記憶装置6は演算処理装置4を部分空間設定手段20、部分空間選択手段22、ブロック空間設定手段24、壁面探索手段26、円柱面探索手段28、再探索空間設定手段30、円柱面再探索手段32、円柱形状決定手段34、及び円柱地物登録手段36として機能させるためのプログラム、及びその他のプログラムや、本システムの処理に必要な各種データを記憶する。例えば、記憶装置6は、処理対象データとして解析の対象空間の点群データを格納される。例えば、道路及びその近傍領域が解析の対象空間とされる。また、レーザスキャナを搭載した車両の位置・姿勢を計測した車載GPS/IMUの計測データも記憶装置6に格納される。また、記憶装置6は、検出しようとする電柱の太さ(半径)や高さに関する情報を予め記憶する。
【0020】
入力装置8は、キーボード、マウスなどであり、ユーザが本システムへの操作を行うために用いる。
【0021】
出力装置10は、ディスプレイ、プリンタなどであり、本システムにより求められた電柱の対象空間内での位置を画面表示、印刷等によりユーザに示す等に用いられる。
【0022】
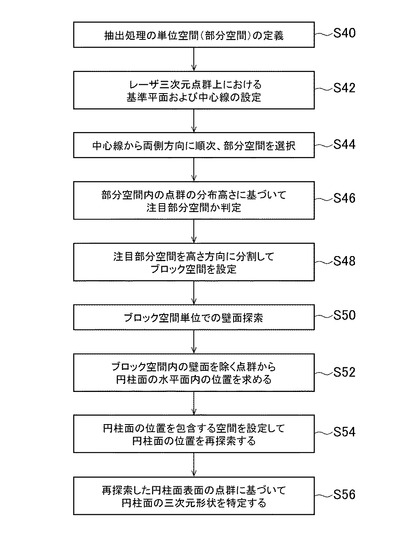
図2は、電柱抽出システム2による電柱抽出処理の概略のフロー図である。この図2を参照しながら、演算処理装置4の各手段を説明する。
【0023】
部分空間設定手段20は、対象空間を垂直面で分割して得られる柱状の複数の部分空間を壁面抽出の処理の初期の単位空間として設定する(S40)。本実施形態では、部分空間設定手段20は、対象空間を水平面(XYZ直交座標系でX−Y平面とする)内にて二次元直交格子(メッシュ)状に分割して四角柱形状の部分空間を生成する。例えば、部分空間の水平断面は幅W及び奥行きDが50cmの正方形とすることができる。部分空間の高さHは対象空間の高さ(Z軸方向の寸法)と一致させることができ、その高さは検出目的とする電柱の高さより大きく設定される。なお、部分空間設定手段20を構成するプログラムでは、幅W、奥行きD及び高さHはパラメータ化されており、例えば、ユーザが入力装置8を用いて変更することができる。
【0024】
部分空間選択手段22は部分空間のうち予め設定した閾値以上の高さまで分布する点群を含むものを注目部分空間として選択する。当該閾値は検出対象とする電柱の高さに基づいて、当該電柱を含む部分空間が確実に選択される一方、当該電柱を含まない部分空間をなるべく選択しないように設定するのが好適である。
【0025】
具体的には、部分空間設定手段20は複数の部分空間を所定の順序で設定し、部分空間選択手段22は当該部分空間内が注目部分空間となるか判定する。上述したように点群データは道路等に位置するレーザスキャナからのレーザ照射によって取得され、当該レーザスキャナから見える電柱、建物等の地物が点群データによる三次元形状上に捉えられる。そこで、部分空間設定手段20は例えば、当該三次元形状にて道路等に対応する平面の部分に基づいて基準平面を決定し、また、道路に沿って道幅内に水平に当該三次元形状の中心線を設定する(S42)。そして、当該中心線に沿って順番に部分空間の設定の起点を設定し、中心線に直交する線に沿って両側方向に当該起点から近い順に部分空間を設定する(S44)。部分空間選択手段22は当該部分空間内の点群の高さが閾値以上であれば当該部分空間を注目部分空間と判定する(S46)。
【0026】
ブロック空間設定手段24は、注目部分空間を水平面で分割して、縦に積み重なる複数のブロック空間を設定する(S48)。例えば、ブロック空間の高さHBは部分空間の幅W、奥行きDと同程度に設定することができる。
【0027】
壁面探索手段26は、ブロック空間ごとに、水平面内にて当該水平面に射影された点群が予め設定した基準以上に近傍に集まる線分(点群集中線分)を探索して、当該線分を水平面内における壁面の位置(水平面内壁面位置)と推定する(S50)。ブロック空間ごとに水平面内壁面位置を探索することで、垂直方向に細長い注目部分空間にて異なる高さに存在し得る、位置・向きが相違した複数の壁面を分離できる。ここで、壁面探索手段26は、或るブロック空間にて点群集中線分を検出したことを以て、当該点群集中線分の位置に壁面が存在すると判断する構成とすることもできるが、本実施形態では、さらに当該ブロック空間に隣接する空間にて当該点群集中線分につながる点群集中線分(連接線分)を探索し、連接線分が存在する場合に、当該ブロック空間の点群集中線分を壁面位置を判断する構成としている。これにより、検出される壁面の信頼性が向上する効果があり、特にブロック空間(又は部分空間)の水平断面のサイズ(幅W及び奥行きD)が比較的小さく設定される場合に壁面の誤検出が少なくなる。
【0028】
円柱面探索手段28は、ブロック空間に存在する点群のうち壁面に対応するものを除いた残りの点群(残余点群)を求め、水平面内での残余点群の分布に基づいて、電柱の円柱面の位置を探索する(S52)。具体的には円柱面探索手段28はX−Y平面での円柱面の中心位置Cα及び半径Rαを算出する。
【0029】
ここで、ブロック空間には円柱面の一部分しか存在しないことが想定され、ブロック空間ごとに抽出される残余点群に基づいて円柱面探索手段28により求められる円柱面(中心座標Cα及び半径Rα)についての信頼性、精度は低くなり得る。
【0030】
そこで、ブロック空間にて円柱面探索手段28により円柱面の位置が検出された場合に、その位置に基づいて円柱面の位置を再度算出する再探索処理を行う(S54)。再探索空間設定手段30は再探索を行う空間(再探索空間)として、水平断面が電柱の水平断面である円を包含する大きさであり、その中心が円柱面探索手段28が求めた円柱面の中心Cαに一致し、また、垂直方向の位置(下端及び上端の位置)が円柱面が検出されたブロック空間と基本的に同じである空間を設定する。本実施形態では再探索空間を水平断面が正方形の直方体にする。例えば、その水平断面はブロック空間のそれより大きく設定することができ、本実施形態では幅、奥行きをそれぞれ10cm程度大きく設定する。
【0031】
円柱面再探索手段32は再探索空間内の点群の水平面内での分布に基づいて円柱面の位置(中心座標Cβ及び半径Rβ)を求め、再探索空間の点群のうち当該円柱面の表面上に存在する点群(円柱面点群)を抽出する。ここで、円柱面点群は、例えば、半径が[Rβ,Rβ+ΔR]なる範囲であるリング形状の領域に存在するものを抽出することができる。ΔRは、想定する電柱の表面の点群幅であり、例えば、電柱の表面の凹凸の大きさや点群の位置の測定精度に応じた大きさに設定される。また、多くの電柱は正確には側面がテーパーを有しており、高い位置ほど細くなる。このことを考慮してΔRを設定することもできる。なお、再探索はブロック空間ごとに抽出されている上記残余点群のうち再探索空間内に存在するものを用いて行うことが好適である。
【0032】
上述の円柱面探索手段28及び円柱面再探索手段32による円柱面の探索は注目部分空間に設定したブロック空間に対応した高さごとに行った。この探索は、例えば、注目部分空間に設定した複数段のブロック空間の下段から上段へ向かう方向に順番に行うことができる。
【0033】
円柱形状決定手段34は、注目部分空間に設定したブロック空間に対応した高さごとに再探索にて抽出された円柱面点群に基づいて、円柱面の三次元形状を求める(S56)。具体的には、円柱形状決定手段34は、注目部分空間に対応して得られた円柱面点群を水平面に射影して、その分布に基づいて円柱面の中心位置C及び半径Rを求める。また、円柱形状決定手段34は再探索で得られた円柱面点群のうち中心C及び半径Rで定義される円柱面上に存在する点群を、円柱面再探索手段32による円柱面点群と同様に抽出する。そして、その点群の最大高度AH及び最小高度ALを求める。円柱面の三次元形状は中心C、半径R、最大高度AH及び最小高度ALにより特定され、その形状が円柱地物登録手段36により記憶装置6に登録される。本実施形態では円柱形状決定手段34は、円柱面の当該三次元形状を表すワイヤーフレームモデルを生成し、円柱地物登録手段36は当該モデルを構成するラインを記憶装置6に格納する。
【0034】
以下、電柱抽出システム2が行う処理をより詳しく説明する。電柱抽出システム2は処理開始時に検索情報を初期化する。この初期化により例えば、記憶装置6やRAM(Random Access Memory)などに設けられる各種の作業領域の記憶内容が消去される。また、部分空間のサイズ(幅W,奥行きD,高さH)など、処理に用いる各種パラメータがユーザの入力により設定されたり、記憶装置6に予め用意されたパラメータセットがRAM等の作業領域に読み込まれる。
【0035】
例えば、部分空間設定手段20が対象空間をX軸方向及びY軸方向に沿ってメッシュ状に分割する場合、部分空間の幅W及び奥行きDがパラメータとして設定されると、それらが当該メッシュの間隔(部分空間のサイズ)となり、対象空間のサイズに応じてX,Y各方向の部分空間の配列個数が定まる。当該配列個数により、X,Y各方向の部分空間の位置を示すインデックスの範囲が決定される。部分空間設定手段20は、部分空間の二次元メッシュ状の配置を表すインデックスを所定の順番で変更し、設定されたインデックスに応じた位置(X,Y各方向の座標範囲)で定義される部分空間を設定する。
【0036】
ここで、道路を走行する車両上からレーザ照射を行い点群データを取得した場合、上述したように、点群データが表す三次元形状にて道路等に対応する平面の部分に基づいて基準平面が設定され、道路に沿って当該三次元形状の中心線が設定される。説明を簡単にするために、当該中心線をX軸(つまりY=0)とし、車両が走行する方向にX方向のインデックスが増加し、道幅方向に対応するY方向に関しては、中心線から離れるに従ってインデックスの絶対値が増加するものとする。例えば、Y方向のインデックスは中心線の位置では0とし、走行方向に対して左向きに、1,2,3,・・・と設定し、右向きには−1,−2,−3,・・・と設定することができる。この場合、部分空間設定手段20は例えば、X方向のインデックスを順番にインクリメントし、X方向のインデックスの各値にて、Y軸の正方向と負方向との両方向にY方向のインデックスを変化させる。すなわち、部分空間設定手段20はX方向の或るインデックスの値にて、Y方向のインデックスを0から順番に増加させて部分空間を設定し、また−1から順番に減少させて部分空間を設定する。
【0037】
このように設定した部分空間(一次部分空間)ごとに、後述する電柱検索処理を行う。さらに、当該部分空間ごとに、その中の点群における最大標高の点を検索して、その点を水平面内での中心とした部分空間(二次部分空間)を設定して、一次部分空間と同様の電柱検索処理を行う。
【0038】
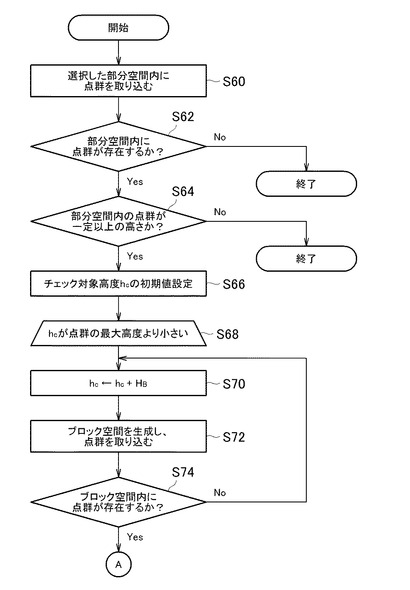
図3及び図4は電柱検索処理の概略のフロー図である。部分空間選択手段22は順次設定される部分空間に包含されている点群を例えば、ハードディスク等の記憶装置6からRAM等の作業領域に取り込む(S60)。部分空間に取り込んだ点群内に所定閾値Th1以上の個数の点群が存在し(S62にて「Yes」の場合)、かつ当該点群の分布範囲の最大高度APMAXが所定閾値Th2以上である場合(S64にて「Yes」の場合)、部分空間選択手段22は当該部分空間を注目部分空間と判断する。一方、部分空間内の点群の個数が閾値Th1未満である場合(S62にて「No」の場合)、及び当該点群の最大高度APMAXが閾値Th2未満である場合(S64にて「No」の場合)、当該部分空間は注目部分空間とは判定されず、当該部分空間についての以降の処理は行われない。
【0039】
ブロック空間設定手段24は、注目部分空間の高さ方向に積み重なる複数のブロック空間を順次設定する。例えば、ブロック空間設定手段24は注目部分空間の下側の位置から上方へブロック空間を順次設定し、ブロック空間の上端の高さが当該注目部分空間の点群の最大高度APMAXを超えると、当該注目部分空間でのブロック空間の設定を終了する。チェック対象高度hCはこの動作を制御するための変数であり、hCの初期値として検索開始高度(最初に設定するブロック空間の下端の高さにオフセット値を加えた高さ)が設定される(S66)。基準面に近いブロック空間内にはガードレールや柵、植栽等といった検出対象以外の地物が多いため、3〜5m程度のオフセット値を設けることが好ましい。オフセット値はユーザが入力装置8を操作して調整可能である。hCはブロック空間を設定する度に、ブロック空間の高さHBを加算されて更新され(S70)、ブロック空間設定手段24は、更新されたhCを上端高度とする高さHBのブロック空間を生成し、当該ブロック空間に点群を取り込む(S72)。
【0040】
ブロック空間設定手段24は生成したブロック空間に点群が存在しなければ(S74にて「No」の場合)、処理S70に戻り次のブロック空間を生成する。
【0041】
一方、生成したブロック空間に点群が存在する場合(S74にて「Yes」の場合)、当該ブロック空間での壁面探索手段26、円柱面探索手段28、再探索空間設定手段30及び円柱面再探索手段32による処理が開始される(図4のノードAへ処理が進む)。
【0042】
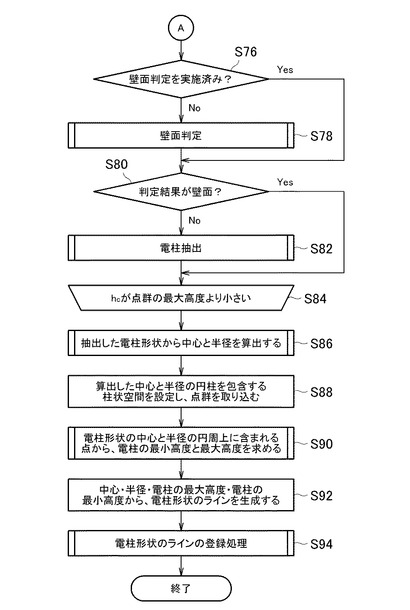
当該ブロック空間について壁面判定が実施されていなければ(S76にて「No」の場合)壁面探索手段26による壁面判定が行われる(S78)。当該壁面判定処理S78の判定結果、または既に壁面判定が実施されている場合(S76にて「Yes」の場合)における判定結果が、当該ブロック空間に壁面以外のものが存在することを示すものであれば(S80にて「No」の場合)、当該ブロック空間における電柱の抽出処理が行われる(S82)。一方、壁面判定の結果が当該ブロック空間に壁面のみ存在することを示すものである場合は(S80にて「Yes」の場合)、電柱抽出処理S82は行われない。
【0043】
以上の処理S70〜S82はチェック対象高度hCが最大高度APMAXより小さい間、繰り返される(S68,S84)。
【0044】
後述するように電柱抽出処理S82では円柱面探索手段28と円柱面再探索手段32とにより2回の円柱面の探索が行われ、円柱面が検出されたブロック空間からは円柱面点群が抽出される。円柱形状決定手段34は、後述する円柱面探索手段28と同様の手法で、注目部分空間に対応して抽出された円柱面点群の水平面での分布に基づいて円柱面の中心位置C及び半径Rを算出する(S86)。また、円柱形状決定手段34は、算出した中心C及び半径Rで定義される円を包含する水平断面を有する柱状の直方体の空間を定義し、当該空間に存在する点群を取り込む(S88)。当該直方体の垂直の中心軸は円の中心Cに位置し、一辺が直径2Rに応じた大きさの正方形の水平断面に設定される。円柱面探索手段28等によるここまでの検索処理に対応して、例えば、当該直方体の上端、下端の高さは注目部分空間内の点群の最大高度APMAX、最小高度APMINに設定することができる。
【0045】
円柱形状決定手段34は処理S88にて設定した空間内の点群のうち水平面内の位置が中心C及び半径Rで定義される円周上にあるものを抽出し、抽出された点群の高度範囲の最大値及び最小値をそれぞれ電柱形状の最大高度AH及び最小高度ALとする(S90)。そして、中心C、半径R、最大高度AH及び最小高度ALによって特定される円柱面の形状を表すワイヤーフレームモデルが生成され(S92)、円柱地物登録手段36は当該モデルを構成するラインを記憶装置6に登録する(S94)。
【0046】
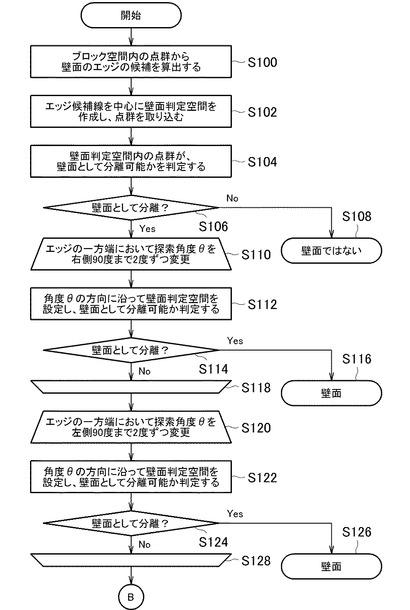
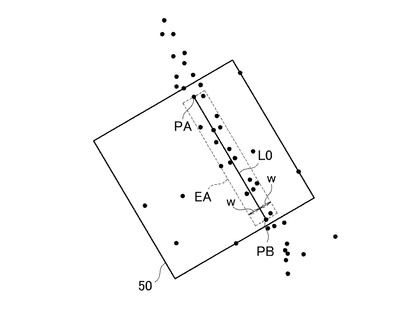
次に壁面判定処理S78及び電柱抽出処理S82を説明する。図5、図6は壁面判定処理S78の概略のフロー図であり、図5、図6はノードBにてつながる一連の処理を示している。また、図7は壁面判定処理S78におけるブロック空間内での壁面を検出する処理S100〜S104を説明する模式図である。図7は、ブロック空間を上面から見た図であり、ブロック空間の幅W及び奥行きDで定義される矩形50と、ブロック空間内の点群のX−Y面内での配置の一例が示されている。壁面探索手段26は、ブロック空間内の点群から任意の2つのデータ点PA,PBを選択し、それら2点を両端とするX−Y面内での線分L0をエッジ(水平面内壁面位置)の候補線として設定する(S100)。そして、線分L0を中心としてその両側にそれぞれ幅w(合計幅2w)の帯状領域EAを設定する。ブロック空間に一致した高さ範囲で、かつ帯状領域EAを水平断面とする直方体の壁面判定空間を設定し、当該空間内に存在する点群を取り込む(S102)。壁面探索手段26は当該空間の点群が壁面として分離可能か判定する(S104)。例えば、当該判定処理において壁面探索手段26は、ブロック空間内の点群のうちX−Y平面での座標が当該領域EA内に位置するデータ点の個数をカウントする。データ点が領域EA内であるか否かは例えば、X−Y平面上での当該データ点から線分L0への垂線の長さがw以下であるか否かによって判定可能である。また、エッジの条件として、領域EA(又は壁面判定空間)内の点群が表す三次元形状が平坦でないことを課す。具体的には、壁面探索手段26は、領域EA内に包含されるデータ点の高低差(最大標高と最小標高との差)ΔZが予め設定した段差閾値γ以上であれば平坦ではないと判定する。
【0047】
ここで、幅wはパラメータであり、壁面に対応するデータ点のエッジに直交する方向の位置のばらつきを吸収する。例えば、wは3cm程度とすることができる。また、高低差の閾値γは例えば2cm程度に設定できる。
【0048】
壁面探索手段26は、ブロック空間内の2つのデータ点の全ての組み合わせについて候補線を設定して上述の判定を行い、領域EA内に所定基準以上に集まり、かつΔZが閾値γ以上である線分L0をブロック空間にて探索し、当該線分L0を点群集中線分とする。当該基準は例えば、壁面の位置にて想定される点群の個数とすることができ、当該個数はレーザスキャンの点密度や壁面判定空間の大きさ等に応じて設定される。また、当該基準はブロック空間内の点群の個数に占める壁面判定空間内の点群の個数の比率で定義することもできる。例えば、壁面探索手段26は、領域EA内にデータ点が最も多く集まる線分L0を点群集中線分と定める。
【0049】
点群集中線分が検出されなかった場合、処理対象としているブロック空間の点群は壁面として分離できないと判断され(S106にて「No」の場合)、壁面以外の地物等によるものと判断される(S108)。
【0050】
一方、点群集中線分が検出された場合、当該線分は壁面のエッジであり、壁面判定空間内の点群は壁面によるものとして分離可能である(S106にて「Yes」の場合)。しかし、本実施形態では既に述べたように、さらに当該点群集中線分に対する連接線分を探索した上で壁面か否かの判定を行う。この連接線分の探索処理を図5、図6に基づいて説明する。壁面探索手段26はブロック空間にて検出された点群集中線分の一方端につながる連接線分と他方端につながる連接線分とをそれぞれ、点群集中線分の延長線に対する角度を変えて探索する。
【0051】
例えば、点群集中線分の一方端においては、当該線分の延長線の向きを探索角度θ=0°として、当該延長線に対して右側にθを2°ずつ90°まで角度を変え、設定した各探索角度θにて連接線分が存在するかを調べる(S110)。各探索角度θでは、基本的にブロック空間での点群集中線分の探索と同様の処理で、連接線分となる点群集中線分が存在するかを調べる。具体的には、処理S100〜S106で検出されている点群集中線分の一方端につながる壁面判定空間を設定する。当該壁面判定空間は領域EAと同様の長方形の平面形状に設定される。当該長方形はその短辺の中点を点群集中線分の一方端に接続され、その長辺に沿った中心線を探索角度θに一致させて配置される。設定された壁面判定空間内に存在する点群を処理S102と同様に取り込み、処理S104と同様にして当該点群が壁面として分離可能か判定する(S112)。
【0052】
当該探索にて壁面として分離できる点群が検出された場合(S114にて「Yes」の場合)、そのときの壁面判定空間の領域EAの中心線分L0が、連接線分を構成する点群集中線分となる。連接線分が検出されると元のブロック空間にて検出された点群集中線分は壁面のエッジであり、その壁面判定空間内の点群は壁面によるものとして分離可能であると判断される(S116)。
【0053】
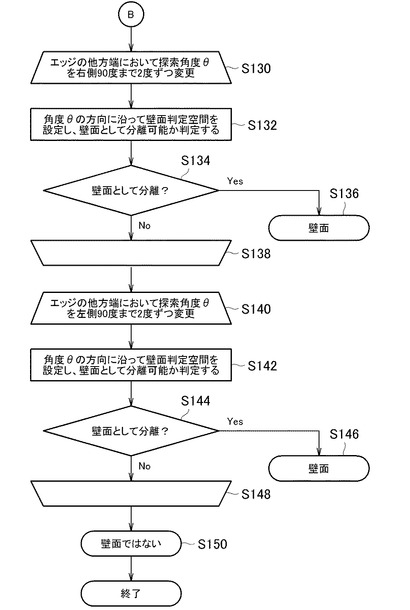
この点群集中線分の一方端における右側角度範囲での探索処理(S110〜S118)と同様に、点群集中線分の一方端における左側角度範囲での探索処理(S120〜S128)、点群集中線分の他方端における右側角度範囲での探索処理(S130〜S138)、及び点群集中線分の他方端における左側角度範囲での探索処理(S140〜S148)が行われる。これら4つの角度範囲での探索処理のいずれにおいても連接線分が検出されなかった場合は、元のブロック空間にて検出された点群集中線分は壁面のエッジではないと判断される(S150)。
【0054】
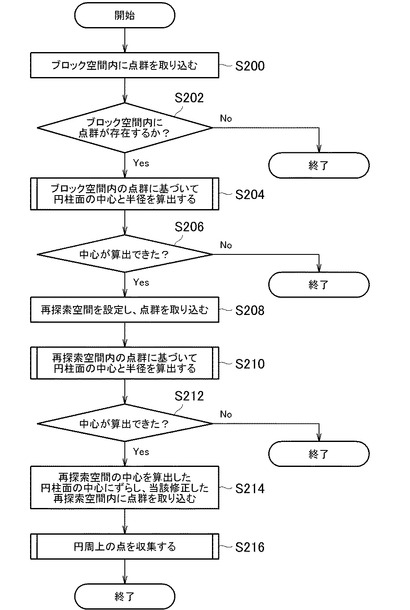
図8は電柱抽出処理S82の概略のフロー図である。円柱面探索手段28はブロック空間内の処理対象となる点群を取り込む(S200)。ここで、当該ブロック空間内に壁面判定処理S78で壁面として分離された点群が存在する場合には、円柱面探索手段28はブロック空間内に存在する点群のうち当該点群を除いた残りの点群を円柱面探索の処理対象とする。ブロック空間内に処理対象とする点群が存在する場合には(S202にて「Yes」の場合)実質的な円柱面探索処理が開始され、円柱面探索手段28がブロック空間内の処理対象点群に基づいて円柱面の中心Cα及び半径Rαを求める処理を行う(S204)。
【0055】
この中心Cα[XCα,YCα]、及び半径Rαを算出する処理を説明する。円柱面探索手段28は、点群から任意の3点(P1[XP1,YP1],P2[XP2,YP2],P3[XP3,YP3])を選択する。中心Cα及び半径Rαで定義される円がこれら3点を通る場合、以下の(1)〜(3)式が得られる。
(XCα−XP1)2 +(YCα−YP1)2 = Rα2 ・・・・・(1)
(XCα−XP2)2 +(YCα−YP2)2 = Rα2 ・・・・・(2)
(XCα−XP3)2 +(YCα−YP3)2 = Rα2 ・・・・・(3)
【0056】
これらを連立させて解くことでXCα,YCα及びRαが算出される。ここで、半径がどの程度の大きさであるかは、検出しようとする円柱形状地物に応じて想定可能である。電柱を抽出する本システムでは、直径は大まかには20cm程度であることから、半径を10cm前後の範囲と仮定することができる。このことから、算出された半径Rαが当該範囲に該当しない場合は、選択した3点P1〜P3は電柱の円柱面上の点ではないと判断する。
【0057】
また、半径Rαが当該範囲に該当する場合には、ブロック空間内の点群のうち、算出した円柱面上の点の数NONと円柱面より内側の点の数NINとを数える。具体的には、ブロック空間内の点群から任意の点を順次選択し、当該点のX−Y面内での位置の中心Cαからの距離rを算出する。r>Rα+ΔRである場合は、選択した点は、想定する電柱の表面の点群幅より外側に位置するものであるとしてカウントしない。一方、Rα≦r≦Rα+ΔRである場合は、NONをカウントアップする。また、r<Rαである場合は、NINをカウントアップする。
【0058】
ブロック空間内の点群の全てについて上記rの判定を行った結果、電柱内部の点が1点でも存在する場合、つまりNINが0でない場合は、選択した3点P1〜P3は電柱の円柱面上の点ではないと判断する。一方、NINが0である場合は、当該3点P1〜P3に基づいて得られた円(中心Cα及び半径Rα)について円周上の点の数NONを記録する。
【0059】
円柱面探索手段28はブロック空間内の残余点群から選択する任意の3点P1〜P3の全ての組み合わせについて上記計算を行い、円周上の点の数NONが最も多い円柱面を当該ブロック空間における電柱の円柱面の候補とする。
【0060】
候補となる円柱面が特定された場合、つまりその中心Cαが算出できた場合は(S206にて「Yes」の場合)、再探索処理が行われる。一方、中心Cαが算出できなかった場合は(S206にて「No」の場合)、電柱抽出処理S82を終了する。
【0061】
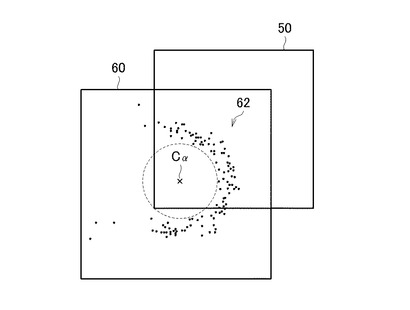
図9は、再探索処理が行われる再探索空間の一例を示す模式図である。図9は、対象空間を上から見た図であり、水平面内での或るブロック空間の配置(矩形50)、再探索空間の配置(矩形60)、及び電柱の円柱面から得られる点群62の分布が示されている。再探索空間は、水平断面の中心を円柱面探索手段28により特定された中心Cαに一致させ、また矩形60の一辺を矩形50より10cm程度大きく設定される。これにより、再探索空間には、ブロック空間にて検出された円柱面候補についてその表面に存在する点群としてブロック空間内に存在する点群だけでなく、その隣接空間に存在する点群まで取り込むことができる。
【0062】
図8を用いて、円柱面探索手段28による初回の探索処理(S200〜S206)に続く再探索処理を説明する。再探索空間設定手段30は再探索空間を設定し、当該空間内に存在する点群が処理対象点群としてRAM等の作業領域に読み込まれる(S208)。円柱面再探索手段32は再探索空間内の処理対象点群に基づいて円柱面の中心Cβ及び半径Rβを求める処理を行う(S210)。この処理は、基本的に初回の探索処理S204と同様に行うことができる。円周全体を包含し得る再探索空間を用い、かつ初回検索にて円柱面の候補が検出された点群が用いられるので、再探索処理は初回よりも好適な精度で円柱面を検出できる可能性が高い。また、精度向上のために本実施形態では、点群から4点P1〜P4を選択し、それら4点を通る円を断面とする円柱面を探索する。当該4点を通る円柱面が特定された場合、つまりその中心Cβが算出できた場合は(S212にて「Yes」の場合)、再探索空間の中心をCαからCβにずらして(S214)、これにより位置が修正された再探索空間内の点群のうち中心Cβ及び半径Rβで定義される円柱面の表面上に存在する上述の円柱面点群を抽出する(S216)。
【0063】
電柱抽出処理S82は処理S216にて円柱面点群を抽出すると終了する。また、ブロック空間内に処理対象とする点群が存在しない場合(S202にて「No」の場合)、及び中心Cα又はCβを算出できない場合(S206及びS212のいずれかにて「No」の場合)には円柱面点群を抽出せずに終了する。
【0064】
注目部分空間に設定される複数段のブロック空間について上述の電柱抽出処理S82を行い、円柱面点群が抽出されると、既に述べたように円柱形状決定手段34が当該円柱面点群に基づいて、円柱面を特定するパラメータとして中心C、半径R、最大高度AH及び最小高度ALを求める(S86〜S90)。
【0065】
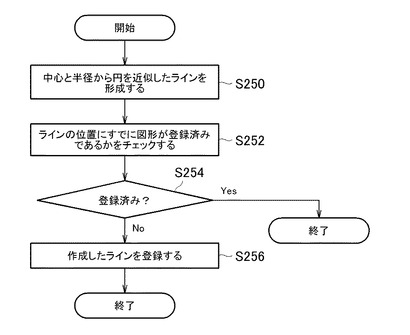
円柱形状決定手段34は当該パラメータによって特定される円柱面の形状を表すワイヤーフレームモデルを生成し(S92)、円柱地物登録手段36は当該モデルを構成するラインを記憶装置6に登録する(S94)。図10は電柱形状の登録処理の概略のフロー図である。中心C及び半径Rで定義される円を近似した多角形のラインが生成される(S250)。この生成したラインの位置に既に他の図形が登録済みではないか調べられる(S252)。他の図形が登録済みである場合は(S254にて「Yes」の場合)、電柱と他の地物との領域が重複していることを意味し検出結果が正しくないことが推定される。よって、この場合は電柱形状の登録は行わない。一方、他の図形が登録済みでない場合は(S254にて「No」の場合)、電柱形状を表すワイヤーモデルを構成するラインを登録する(S256)。具体的には、電柱の円柱面の最大高度AHでの断面の円を近似するライン、最小高度ALでの断面の円を近似するライン、及びそれら最大高度の円を近似する多角形の頂点と最小高度の円を近似する多角形の頂点とを結ぶ電柱側面のラインが求められ登録される(S256)。
【0066】
以上説明した電柱検索処理は上述したように一次部分空間及び二次部分空間について行われる。二次部分空間は基本的には一次部分空間に対してずれた位置に設定され、互いにずれた部分空間について電柱検索処理を行うことで、いずれか一方の電柱検索処理では抽出漏れとなる電柱を他方の電柱検索処理で抽出することが可能となる。すなわち、一次部分空間についての電柱検索処理と二次部分空間についての電柱検索処理とが互いに補完して電柱を好適に検出することが可能となる。
【0067】
具体的には、電柱の円柱面の全周のうちレーザスキャナで走査される範囲は一般には一部であり、例えば、比較的狭い中心角の円弧状の面から得られた点群が、複数の部分空間に跨がって位置すると各部分空間に分割された点群は壁面と誤認識されやすい。当該誤認識が起こると当該点群は壁面判定S78で除去され、電柱として抽出されない。これに対して、部分空間をずらして設定することで、円弧状の面から得られた点群を分割されないようにしたり分割数を減らしたりすることができ、壁面と判定されにくくすることができる。
【0068】
また、電柱は例えば、家屋への電線引き込みのため軒先に設置される場合がある。勾配屋根の軒先から得られる点群は水平面内での分布範囲が広く、また高さ方向の分布範囲は狭いため、壁面と判定されにくい。そのため、電柱抽出処理S82の処理対象となるブロック空間内の点群に屋根の点群が混入し、円柱面を好適に抽出できないことが起こり得る。この場合も、部分空間をずらせば、いずれかの部分空間では電柱以外の点群の影響が軽減され電柱を抽出できる可能が高まる。
【0069】
なお、上述したように通常、電柱はテーパー形状であり、コンクリート製の電柱は例えば、75cm上に行くほど直径が1cm小さくなる。既に述べたように、ΔRの設定にはこれを考慮することが好適である。具体的には、円柱面の初回の探索や再探索を行うブロック空間や再探索空間の高さHBでの直径の変化量の1/2をΔRに含めることができる。また、円柱面の半径RαやRβについて上述の実施形態では10cm前後と仮定して円柱面の断面の円を特定した。この仮定に係る半径を処理対象とするブロック空間や再探索空間が設定される高度に応じて変化させてもよい。また、上述の処理S86では、高さ方向の複数段の再探索空間それぞれから抽出された円柱面点群を水平面に射影して中心C及び半径Rを求めた。これに対し、それら複数段から抽出された円柱面点群が存在する円柱面がテーパーを有していることを前提として、処理S86を当該円柱面点群の三次元分布に適合する円錐面を算出する処理に代えてもよい。
【0070】
以上、円柱形状の地物を抽出する本発明を電柱を抽出するシステムを例に説明したが、本発明は電柱以外の円柱形状地物の抽出に用いることもでき、例えば、道路標識や街路灯の支柱の検出に適用することもできる。
【符号の説明】
【0071】
2 電柱抽出システム、4 演算処理装置、6 記憶装置、8 入力装置、10 出力装置、20 部分空間設定手段、22 部分空間選択手段、24 ブロック空間設定手段、26 壁面探索手段、28 円柱面探索手段、30 再探索空間設定手段、32 円柱面再探索手段、34 円柱形状決定手段、36 円柱地物登録手段。
【技術分野】
【0001】
本発明は、地物表面の三次元形状を表す点群データに基づいて円柱形状の地物を検出するデータ解析装置、データ解析方法、及びプログラムに関する。
【背景技術】
【0002】
特許文献1には、レーザスキャナを用いて、地物の形状を表す三次元点群データを取得する技術が示されている。例えば、モービルマッピングシステムでは、レーザスキャナは自動車の上部に搭載され、周囲にレーザを照射する。レーザの光軸は仰俯角及び方位角を変えることにより垂直方向及び水平方向に走査され、走査範囲内にて微小角度ごとにレーザパルスが発射される。レーザの発射から反射光の受信までの時間に基づいて距離が計測され、またその際、レーザの発射方向、時刻、及び車体の位置・姿勢などが計測される。車体の位置・姿勢の計測は例えば、GPS/IMU(Global Positioning System:全地球測位システム、Inertial Measurement Unit:慣性計測装置)を用いて行われる。このようにして得られた計測データから、レーザパルスを反射した点の三次元座標を表す点群データが求められる。
【0003】
また、点群データの取得と同時に、カメラを用いて映像が撮影される。画像はデータ解析にてユーザが計測対象部分を指定する際に利用することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−204615号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来、点群データをもとに電柱などの円柱形状の地物やその他の地物を判読するためには人手を要しており、三次元CADで編集ツール等を利用して手作業で地物の抽出作業が行われていた。
【0006】
本発明は、地物表面の三次元形状を表す点群データに基づいて円柱形状の地物を自動的に検出するデータ解析装置、データ解析方法、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係るデータ解析装置は、対象空間における地物表面の三次元形状を表す点群データに基づいて、円柱形状を有する目的地物を検出するものであって、前記対象空間を垂直面で分割して、柱状の複数の部分空間を設定する部分空間設定手段と、前記部分空間のうち前記目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する部分空間選択手段と、前記注目部分空間の水平面内における線分のうち、当該水平面に射影された前記点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する壁面探索手段と、前記点群のうち前記壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、前記目的地物の円柱面の位置を探索する円柱面探索手段と、を有する。
【0008】
他の本発明に係るデータ解析装置は、前記注目部分空間を分割して、縦に積み重なる複数のブロック空間を設定するブロック空間設定手段を有し、前記壁面探索手段は、前記ブロック空間ごとに壁面位置を探索し、前記円柱面探索手段は、前記壁面位置が検出されなかった前記ブロック空間内の前記点群を前記残余点群として前記円柱面の位置を探索する。
【0009】
別の本発明に係るデータ解析装置においては、前記壁面探索手段は、前記ブロック空間に隣接する空間における前記点群集中線分であって、当該ブロック空間にて検出された前記点群集中線分に連なる連接線分を探索し、当該連接線分が存在する場合に、当該ブロック空間の前記点群集中線分を前記壁面位置と推定する。
【0010】
別の本発明に係るデータ解析装置は、さらに、前記ブロック空間にて前記円柱面の位置が検出された場合に、当該ブロック空間に対応する高さに位置し、かつ前記目的地物の水平断面を包含する大きさの水平断面を有する柱状の再探索空間を、当該円柱面の中心軸を中心として設定する再探索空間設定手段と、前記再探索空間内の前記点群の前記水平面内での分布に基づいて当該円柱面の位置を求め、前記点群のうち当該円柱面の表面上に存在する円柱面点群を抽出する円柱面再探索手段と、を有する。
【0011】
別の本発明に係るデータ解析装置は、さらに前記ブロック空間に対応して抽出された前記円柱面点群に基づいて、前記円柱面の三次元形状を求める円柱形状決定手段を有する。
【0012】
本発明に係るデータ解析方法は、対象空間における地物表面の三次元形状を表す点群データに基づいて、円柱形状を有する目的地物を検出する方法であって、前記対象空間を垂直面で分割して、柱状の複数の部分空間を設定する部分空間設定ステップと、前記部分空間のうち前記目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する部分空間選択ステップと、前記注目部分空間の水平面内における線分のうち、当該水平面に射影された前記点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する壁面探索ステップと、前記点群のうち前記壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、前記目的地物の円柱面の位置を探索する円柱面探索ステップと、を有する。
【0013】
本発明に係るプログラムは、コンピュータに、対象空間における地物表面の三次元形状を表す点群データに基づいて、円柱形状を有する目的地物を検出する処理を行わせるためのプログラムであって、当該コンピュータを、前記対象空間を垂直面で分割して、柱状の複数の部分空間を設定する部分空間設定手段、前記部分空間のうち前記目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する部分空間選択手段、前記注目部分空間の水平面内における線分のうち、当該水平面に射影された前記点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する壁面探索手段、及び前記点群のうち前記壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、前記目的地物の円柱面の位置を探索する円柱面探索手段、として機能させる。
【発明の効果】
【0014】
本発明によれば、地物表面の三次元形状を表す点群データに基づいて円柱形状の地物を自動的に検出することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施形態に係る電柱抽出システムの概略の構成を示すブロック図である。
【図2】本発明の実施形態に係る電柱抽出システムによる電柱抽出処理の概略のフロー図である。
【図3】電柱検索処理の概略のフロー図である。
【図4】電柱検索処理の概略のフロー図である。
【図5】壁面判定処理の概略のフロー図である。
【図6】壁面判定処理の概略のフロー図である。
【図7】ブロック空間内での壁面を検出する処理を説明する模式図である。
【図8】電柱抽出処理の概略のフロー図である。
【図9】再探索空間の一例を示す模式図である。
【図10】電柱形状の登録処理の概略のフロー図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態(以下実施形態という)である電柱抽出システム2について、図面に基づいて説明する。本システムは、地物表面の三次元形状を表す点群データに基づいて円柱形状の地物である電柱を検出するデータ解析装置である。本システムは地表面に略垂直な地物表面において電柱に対応する半径を有する円柱面と、当該円柱面に比べて平坦な壁面とを分離して電柱を抽出する。点群データは例えば、上述のモービルマッピングシステムのように地上を走行する車両に搭載されたレーザスキャナにより取得される。また、レーザスキャナを地上に設置して計測を行っても良い。点群データが地物表面の三次元形状を表すには、地物表面の凹凸のスケールに応じた点密度でレーザスキャンが行われる必要がある。この点、車両や三脚を用いて道路等の地上から行うレーザスキャンは、例えば、道路の近傍に建つ電柱の円柱面及び、建物などの壁面の形状を捉えることができる程度の走査密度を実現できる。
【0017】
図1は、電柱抽出システム2の概略の構成を示すブロック図である。本システムは、演算処理装置4、記憶装置6、入力装置8及び出力装置10を含んで構成される。演算処理装置4として、本システムの各種演算処理を行う専用のハードウェアを作ることも可能であるが、本実施形態では演算処理装置4は、コンピュータ及び、当該コンピュータ上で実行されるプログラムを用いて構築される。
【0018】
当該コンピュータのCPU(Central Processing Unit)が演算処理装置4を構成し、後述する部分空間設定手段20、部分空間選択手段22、ブロック空間設定手段24、壁面探索手段26、円柱面探索手段28、再探索空間設定手段30、円柱面再探索手段32、円柱形状決定手段34、及び円柱地物登録手段36として機能する。
【0019】
記憶装置6はコンピュータに内蔵されるハードディスクなどで構成される。記憶装置6は演算処理装置4を部分空間設定手段20、部分空間選択手段22、ブロック空間設定手段24、壁面探索手段26、円柱面探索手段28、再探索空間設定手段30、円柱面再探索手段32、円柱形状決定手段34、及び円柱地物登録手段36として機能させるためのプログラム、及びその他のプログラムや、本システムの処理に必要な各種データを記憶する。例えば、記憶装置6は、処理対象データとして解析の対象空間の点群データを格納される。例えば、道路及びその近傍領域が解析の対象空間とされる。また、レーザスキャナを搭載した車両の位置・姿勢を計測した車載GPS/IMUの計測データも記憶装置6に格納される。また、記憶装置6は、検出しようとする電柱の太さ(半径)や高さに関する情報を予め記憶する。
【0020】
入力装置8は、キーボード、マウスなどであり、ユーザが本システムへの操作を行うために用いる。
【0021】
出力装置10は、ディスプレイ、プリンタなどであり、本システムにより求められた電柱の対象空間内での位置を画面表示、印刷等によりユーザに示す等に用いられる。
【0022】
図2は、電柱抽出システム2による電柱抽出処理の概略のフロー図である。この図2を参照しながら、演算処理装置4の各手段を説明する。
【0023】
部分空間設定手段20は、対象空間を垂直面で分割して得られる柱状の複数の部分空間を壁面抽出の処理の初期の単位空間として設定する(S40)。本実施形態では、部分空間設定手段20は、対象空間を水平面(XYZ直交座標系でX−Y平面とする)内にて二次元直交格子(メッシュ)状に分割して四角柱形状の部分空間を生成する。例えば、部分空間の水平断面は幅W及び奥行きDが50cmの正方形とすることができる。部分空間の高さHは対象空間の高さ(Z軸方向の寸法)と一致させることができ、その高さは検出目的とする電柱の高さより大きく設定される。なお、部分空間設定手段20を構成するプログラムでは、幅W、奥行きD及び高さHはパラメータ化されており、例えば、ユーザが入力装置8を用いて変更することができる。
【0024】
部分空間選択手段22は部分空間のうち予め設定した閾値以上の高さまで分布する点群を含むものを注目部分空間として選択する。当該閾値は検出対象とする電柱の高さに基づいて、当該電柱を含む部分空間が確実に選択される一方、当該電柱を含まない部分空間をなるべく選択しないように設定するのが好適である。
【0025】
具体的には、部分空間設定手段20は複数の部分空間を所定の順序で設定し、部分空間選択手段22は当該部分空間内が注目部分空間となるか判定する。上述したように点群データは道路等に位置するレーザスキャナからのレーザ照射によって取得され、当該レーザスキャナから見える電柱、建物等の地物が点群データによる三次元形状上に捉えられる。そこで、部分空間設定手段20は例えば、当該三次元形状にて道路等に対応する平面の部分に基づいて基準平面を決定し、また、道路に沿って道幅内に水平に当該三次元形状の中心線を設定する(S42)。そして、当該中心線に沿って順番に部分空間の設定の起点を設定し、中心線に直交する線に沿って両側方向に当該起点から近い順に部分空間を設定する(S44)。部分空間選択手段22は当該部分空間内の点群の高さが閾値以上であれば当該部分空間を注目部分空間と判定する(S46)。
【0026】
ブロック空間設定手段24は、注目部分空間を水平面で分割して、縦に積み重なる複数のブロック空間を設定する(S48)。例えば、ブロック空間の高さHBは部分空間の幅W、奥行きDと同程度に設定することができる。
【0027】
壁面探索手段26は、ブロック空間ごとに、水平面内にて当該水平面に射影された点群が予め設定した基準以上に近傍に集まる線分(点群集中線分)を探索して、当該線分を水平面内における壁面の位置(水平面内壁面位置)と推定する(S50)。ブロック空間ごとに水平面内壁面位置を探索することで、垂直方向に細長い注目部分空間にて異なる高さに存在し得る、位置・向きが相違した複数の壁面を分離できる。ここで、壁面探索手段26は、或るブロック空間にて点群集中線分を検出したことを以て、当該点群集中線分の位置に壁面が存在すると判断する構成とすることもできるが、本実施形態では、さらに当該ブロック空間に隣接する空間にて当該点群集中線分につながる点群集中線分(連接線分)を探索し、連接線分が存在する場合に、当該ブロック空間の点群集中線分を壁面位置を判断する構成としている。これにより、検出される壁面の信頼性が向上する効果があり、特にブロック空間(又は部分空間)の水平断面のサイズ(幅W及び奥行きD)が比較的小さく設定される場合に壁面の誤検出が少なくなる。
【0028】
円柱面探索手段28は、ブロック空間に存在する点群のうち壁面に対応するものを除いた残りの点群(残余点群)を求め、水平面内での残余点群の分布に基づいて、電柱の円柱面の位置を探索する(S52)。具体的には円柱面探索手段28はX−Y平面での円柱面の中心位置Cα及び半径Rαを算出する。
【0029】
ここで、ブロック空間には円柱面の一部分しか存在しないことが想定され、ブロック空間ごとに抽出される残余点群に基づいて円柱面探索手段28により求められる円柱面(中心座標Cα及び半径Rα)についての信頼性、精度は低くなり得る。
【0030】
そこで、ブロック空間にて円柱面探索手段28により円柱面の位置が検出された場合に、その位置に基づいて円柱面の位置を再度算出する再探索処理を行う(S54)。再探索空間設定手段30は再探索を行う空間(再探索空間)として、水平断面が電柱の水平断面である円を包含する大きさであり、その中心が円柱面探索手段28が求めた円柱面の中心Cαに一致し、また、垂直方向の位置(下端及び上端の位置)が円柱面が検出されたブロック空間と基本的に同じである空間を設定する。本実施形態では再探索空間を水平断面が正方形の直方体にする。例えば、その水平断面はブロック空間のそれより大きく設定することができ、本実施形態では幅、奥行きをそれぞれ10cm程度大きく設定する。
【0031】
円柱面再探索手段32は再探索空間内の点群の水平面内での分布に基づいて円柱面の位置(中心座標Cβ及び半径Rβ)を求め、再探索空間の点群のうち当該円柱面の表面上に存在する点群(円柱面点群)を抽出する。ここで、円柱面点群は、例えば、半径が[Rβ,Rβ+ΔR]なる範囲であるリング形状の領域に存在するものを抽出することができる。ΔRは、想定する電柱の表面の点群幅であり、例えば、電柱の表面の凹凸の大きさや点群の位置の測定精度に応じた大きさに設定される。また、多くの電柱は正確には側面がテーパーを有しており、高い位置ほど細くなる。このことを考慮してΔRを設定することもできる。なお、再探索はブロック空間ごとに抽出されている上記残余点群のうち再探索空間内に存在するものを用いて行うことが好適である。
【0032】
上述の円柱面探索手段28及び円柱面再探索手段32による円柱面の探索は注目部分空間に設定したブロック空間に対応した高さごとに行った。この探索は、例えば、注目部分空間に設定した複数段のブロック空間の下段から上段へ向かう方向に順番に行うことができる。
【0033】
円柱形状決定手段34は、注目部分空間に設定したブロック空間に対応した高さごとに再探索にて抽出された円柱面点群に基づいて、円柱面の三次元形状を求める(S56)。具体的には、円柱形状決定手段34は、注目部分空間に対応して得られた円柱面点群を水平面に射影して、その分布に基づいて円柱面の中心位置C及び半径Rを求める。また、円柱形状決定手段34は再探索で得られた円柱面点群のうち中心C及び半径Rで定義される円柱面上に存在する点群を、円柱面再探索手段32による円柱面点群と同様に抽出する。そして、その点群の最大高度AH及び最小高度ALを求める。円柱面の三次元形状は中心C、半径R、最大高度AH及び最小高度ALにより特定され、その形状が円柱地物登録手段36により記憶装置6に登録される。本実施形態では円柱形状決定手段34は、円柱面の当該三次元形状を表すワイヤーフレームモデルを生成し、円柱地物登録手段36は当該モデルを構成するラインを記憶装置6に格納する。
【0034】
以下、電柱抽出システム2が行う処理をより詳しく説明する。電柱抽出システム2は処理開始時に検索情報を初期化する。この初期化により例えば、記憶装置6やRAM(Random Access Memory)などに設けられる各種の作業領域の記憶内容が消去される。また、部分空間のサイズ(幅W,奥行きD,高さH)など、処理に用いる各種パラメータがユーザの入力により設定されたり、記憶装置6に予め用意されたパラメータセットがRAM等の作業領域に読み込まれる。
【0035】
例えば、部分空間設定手段20が対象空間をX軸方向及びY軸方向に沿ってメッシュ状に分割する場合、部分空間の幅W及び奥行きDがパラメータとして設定されると、それらが当該メッシュの間隔(部分空間のサイズ)となり、対象空間のサイズに応じてX,Y各方向の部分空間の配列個数が定まる。当該配列個数により、X,Y各方向の部分空間の位置を示すインデックスの範囲が決定される。部分空間設定手段20は、部分空間の二次元メッシュ状の配置を表すインデックスを所定の順番で変更し、設定されたインデックスに応じた位置(X,Y各方向の座標範囲)で定義される部分空間を設定する。
【0036】
ここで、道路を走行する車両上からレーザ照射を行い点群データを取得した場合、上述したように、点群データが表す三次元形状にて道路等に対応する平面の部分に基づいて基準平面が設定され、道路に沿って当該三次元形状の中心線が設定される。説明を簡単にするために、当該中心線をX軸(つまりY=0)とし、車両が走行する方向にX方向のインデックスが増加し、道幅方向に対応するY方向に関しては、中心線から離れるに従ってインデックスの絶対値が増加するものとする。例えば、Y方向のインデックスは中心線の位置では0とし、走行方向に対して左向きに、1,2,3,・・・と設定し、右向きには−1,−2,−3,・・・と設定することができる。この場合、部分空間設定手段20は例えば、X方向のインデックスを順番にインクリメントし、X方向のインデックスの各値にて、Y軸の正方向と負方向との両方向にY方向のインデックスを変化させる。すなわち、部分空間設定手段20はX方向の或るインデックスの値にて、Y方向のインデックスを0から順番に増加させて部分空間を設定し、また−1から順番に減少させて部分空間を設定する。
【0037】
このように設定した部分空間(一次部分空間)ごとに、後述する電柱検索処理を行う。さらに、当該部分空間ごとに、その中の点群における最大標高の点を検索して、その点を水平面内での中心とした部分空間(二次部分空間)を設定して、一次部分空間と同様の電柱検索処理を行う。
【0038】
図3及び図4は電柱検索処理の概略のフロー図である。部分空間選択手段22は順次設定される部分空間に包含されている点群を例えば、ハードディスク等の記憶装置6からRAM等の作業領域に取り込む(S60)。部分空間に取り込んだ点群内に所定閾値Th1以上の個数の点群が存在し(S62にて「Yes」の場合)、かつ当該点群の分布範囲の最大高度APMAXが所定閾値Th2以上である場合(S64にて「Yes」の場合)、部分空間選択手段22は当該部分空間を注目部分空間と判断する。一方、部分空間内の点群の個数が閾値Th1未満である場合(S62にて「No」の場合)、及び当該点群の最大高度APMAXが閾値Th2未満である場合(S64にて「No」の場合)、当該部分空間は注目部分空間とは判定されず、当該部分空間についての以降の処理は行われない。
【0039】
ブロック空間設定手段24は、注目部分空間の高さ方向に積み重なる複数のブロック空間を順次設定する。例えば、ブロック空間設定手段24は注目部分空間の下側の位置から上方へブロック空間を順次設定し、ブロック空間の上端の高さが当該注目部分空間の点群の最大高度APMAXを超えると、当該注目部分空間でのブロック空間の設定を終了する。チェック対象高度hCはこの動作を制御するための変数であり、hCの初期値として検索開始高度(最初に設定するブロック空間の下端の高さにオフセット値を加えた高さ)が設定される(S66)。基準面に近いブロック空間内にはガードレールや柵、植栽等といった検出対象以外の地物が多いため、3〜5m程度のオフセット値を設けることが好ましい。オフセット値はユーザが入力装置8を操作して調整可能である。hCはブロック空間を設定する度に、ブロック空間の高さHBを加算されて更新され(S70)、ブロック空間設定手段24は、更新されたhCを上端高度とする高さHBのブロック空間を生成し、当該ブロック空間に点群を取り込む(S72)。
【0040】
ブロック空間設定手段24は生成したブロック空間に点群が存在しなければ(S74にて「No」の場合)、処理S70に戻り次のブロック空間を生成する。
【0041】
一方、生成したブロック空間に点群が存在する場合(S74にて「Yes」の場合)、当該ブロック空間での壁面探索手段26、円柱面探索手段28、再探索空間設定手段30及び円柱面再探索手段32による処理が開始される(図4のノードAへ処理が進む)。
【0042】
当該ブロック空間について壁面判定が実施されていなければ(S76にて「No」の場合)壁面探索手段26による壁面判定が行われる(S78)。当該壁面判定処理S78の判定結果、または既に壁面判定が実施されている場合(S76にて「Yes」の場合)における判定結果が、当該ブロック空間に壁面以外のものが存在することを示すものであれば(S80にて「No」の場合)、当該ブロック空間における電柱の抽出処理が行われる(S82)。一方、壁面判定の結果が当該ブロック空間に壁面のみ存在することを示すものである場合は(S80にて「Yes」の場合)、電柱抽出処理S82は行われない。
【0043】
以上の処理S70〜S82はチェック対象高度hCが最大高度APMAXより小さい間、繰り返される(S68,S84)。
【0044】
後述するように電柱抽出処理S82では円柱面探索手段28と円柱面再探索手段32とにより2回の円柱面の探索が行われ、円柱面が検出されたブロック空間からは円柱面点群が抽出される。円柱形状決定手段34は、後述する円柱面探索手段28と同様の手法で、注目部分空間に対応して抽出された円柱面点群の水平面での分布に基づいて円柱面の中心位置C及び半径Rを算出する(S86)。また、円柱形状決定手段34は、算出した中心C及び半径Rで定義される円を包含する水平断面を有する柱状の直方体の空間を定義し、当該空間に存在する点群を取り込む(S88)。当該直方体の垂直の中心軸は円の中心Cに位置し、一辺が直径2Rに応じた大きさの正方形の水平断面に設定される。円柱面探索手段28等によるここまでの検索処理に対応して、例えば、当該直方体の上端、下端の高さは注目部分空間内の点群の最大高度APMAX、最小高度APMINに設定することができる。
【0045】
円柱形状決定手段34は処理S88にて設定した空間内の点群のうち水平面内の位置が中心C及び半径Rで定義される円周上にあるものを抽出し、抽出された点群の高度範囲の最大値及び最小値をそれぞれ電柱形状の最大高度AH及び最小高度ALとする(S90)。そして、中心C、半径R、最大高度AH及び最小高度ALによって特定される円柱面の形状を表すワイヤーフレームモデルが生成され(S92)、円柱地物登録手段36は当該モデルを構成するラインを記憶装置6に登録する(S94)。
【0046】
次に壁面判定処理S78及び電柱抽出処理S82を説明する。図5、図6は壁面判定処理S78の概略のフロー図であり、図5、図6はノードBにてつながる一連の処理を示している。また、図7は壁面判定処理S78におけるブロック空間内での壁面を検出する処理S100〜S104を説明する模式図である。図7は、ブロック空間を上面から見た図であり、ブロック空間の幅W及び奥行きDで定義される矩形50と、ブロック空間内の点群のX−Y面内での配置の一例が示されている。壁面探索手段26は、ブロック空間内の点群から任意の2つのデータ点PA,PBを選択し、それら2点を両端とするX−Y面内での線分L0をエッジ(水平面内壁面位置)の候補線として設定する(S100)。そして、線分L0を中心としてその両側にそれぞれ幅w(合計幅2w)の帯状領域EAを設定する。ブロック空間に一致した高さ範囲で、かつ帯状領域EAを水平断面とする直方体の壁面判定空間を設定し、当該空間内に存在する点群を取り込む(S102)。壁面探索手段26は当該空間の点群が壁面として分離可能か判定する(S104)。例えば、当該判定処理において壁面探索手段26は、ブロック空間内の点群のうちX−Y平面での座標が当該領域EA内に位置するデータ点の個数をカウントする。データ点が領域EA内であるか否かは例えば、X−Y平面上での当該データ点から線分L0への垂線の長さがw以下であるか否かによって判定可能である。また、エッジの条件として、領域EA(又は壁面判定空間)内の点群が表す三次元形状が平坦でないことを課す。具体的には、壁面探索手段26は、領域EA内に包含されるデータ点の高低差(最大標高と最小標高との差)ΔZが予め設定した段差閾値γ以上であれば平坦ではないと判定する。
【0047】
ここで、幅wはパラメータであり、壁面に対応するデータ点のエッジに直交する方向の位置のばらつきを吸収する。例えば、wは3cm程度とすることができる。また、高低差の閾値γは例えば2cm程度に設定できる。
【0048】
壁面探索手段26は、ブロック空間内の2つのデータ点の全ての組み合わせについて候補線を設定して上述の判定を行い、領域EA内に所定基準以上に集まり、かつΔZが閾値γ以上である線分L0をブロック空間にて探索し、当該線分L0を点群集中線分とする。当該基準は例えば、壁面の位置にて想定される点群の個数とすることができ、当該個数はレーザスキャンの点密度や壁面判定空間の大きさ等に応じて設定される。また、当該基準はブロック空間内の点群の個数に占める壁面判定空間内の点群の個数の比率で定義することもできる。例えば、壁面探索手段26は、領域EA内にデータ点が最も多く集まる線分L0を点群集中線分と定める。
【0049】
点群集中線分が検出されなかった場合、処理対象としているブロック空間の点群は壁面として分離できないと判断され(S106にて「No」の場合)、壁面以外の地物等によるものと判断される(S108)。
【0050】
一方、点群集中線分が検出された場合、当該線分は壁面のエッジであり、壁面判定空間内の点群は壁面によるものとして分離可能である(S106にて「Yes」の場合)。しかし、本実施形態では既に述べたように、さらに当該点群集中線分に対する連接線分を探索した上で壁面か否かの判定を行う。この連接線分の探索処理を図5、図6に基づいて説明する。壁面探索手段26はブロック空間にて検出された点群集中線分の一方端につながる連接線分と他方端につながる連接線分とをそれぞれ、点群集中線分の延長線に対する角度を変えて探索する。
【0051】
例えば、点群集中線分の一方端においては、当該線分の延長線の向きを探索角度θ=0°として、当該延長線に対して右側にθを2°ずつ90°まで角度を変え、設定した各探索角度θにて連接線分が存在するかを調べる(S110)。各探索角度θでは、基本的にブロック空間での点群集中線分の探索と同様の処理で、連接線分となる点群集中線分が存在するかを調べる。具体的には、処理S100〜S106で検出されている点群集中線分の一方端につながる壁面判定空間を設定する。当該壁面判定空間は領域EAと同様の長方形の平面形状に設定される。当該長方形はその短辺の中点を点群集中線分の一方端に接続され、その長辺に沿った中心線を探索角度θに一致させて配置される。設定された壁面判定空間内に存在する点群を処理S102と同様に取り込み、処理S104と同様にして当該点群が壁面として分離可能か判定する(S112)。
【0052】
当該探索にて壁面として分離できる点群が検出された場合(S114にて「Yes」の場合)、そのときの壁面判定空間の領域EAの中心線分L0が、連接線分を構成する点群集中線分となる。連接線分が検出されると元のブロック空間にて検出された点群集中線分は壁面のエッジであり、その壁面判定空間内の点群は壁面によるものとして分離可能であると判断される(S116)。
【0053】
この点群集中線分の一方端における右側角度範囲での探索処理(S110〜S118)と同様に、点群集中線分の一方端における左側角度範囲での探索処理(S120〜S128)、点群集中線分の他方端における右側角度範囲での探索処理(S130〜S138)、及び点群集中線分の他方端における左側角度範囲での探索処理(S140〜S148)が行われる。これら4つの角度範囲での探索処理のいずれにおいても連接線分が検出されなかった場合は、元のブロック空間にて検出された点群集中線分は壁面のエッジではないと判断される(S150)。
【0054】
図8は電柱抽出処理S82の概略のフロー図である。円柱面探索手段28はブロック空間内の処理対象となる点群を取り込む(S200)。ここで、当該ブロック空間内に壁面判定処理S78で壁面として分離された点群が存在する場合には、円柱面探索手段28はブロック空間内に存在する点群のうち当該点群を除いた残りの点群を円柱面探索の処理対象とする。ブロック空間内に処理対象とする点群が存在する場合には(S202にて「Yes」の場合)実質的な円柱面探索処理が開始され、円柱面探索手段28がブロック空間内の処理対象点群に基づいて円柱面の中心Cα及び半径Rαを求める処理を行う(S204)。
【0055】
この中心Cα[XCα,YCα]、及び半径Rαを算出する処理を説明する。円柱面探索手段28は、点群から任意の3点(P1[XP1,YP1],P2[XP2,YP2],P3[XP3,YP3])を選択する。中心Cα及び半径Rαで定義される円がこれら3点を通る場合、以下の(1)〜(3)式が得られる。
(XCα−XP1)2 +(YCα−YP1)2 = Rα2 ・・・・・(1)
(XCα−XP2)2 +(YCα−YP2)2 = Rα2 ・・・・・(2)
(XCα−XP3)2 +(YCα−YP3)2 = Rα2 ・・・・・(3)
【0056】
これらを連立させて解くことでXCα,YCα及びRαが算出される。ここで、半径がどの程度の大きさであるかは、検出しようとする円柱形状地物に応じて想定可能である。電柱を抽出する本システムでは、直径は大まかには20cm程度であることから、半径を10cm前後の範囲と仮定することができる。このことから、算出された半径Rαが当該範囲に該当しない場合は、選択した3点P1〜P3は電柱の円柱面上の点ではないと判断する。
【0057】
また、半径Rαが当該範囲に該当する場合には、ブロック空間内の点群のうち、算出した円柱面上の点の数NONと円柱面より内側の点の数NINとを数える。具体的には、ブロック空間内の点群から任意の点を順次選択し、当該点のX−Y面内での位置の中心Cαからの距離rを算出する。r>Rα+ΔRである場合は、選択した点は、想定する電柱の表面の点群幅より外側に位置するものであるとしてカウントしない。一方、Rα≦r≦Rα+ΔRである場合は、NONをカウントアップする。また、r<Rαである場合は、NINをカウントアップする。
【0058】
ブロック空間内の点群の全てについて上記rの判定を行った結果、電柱内部の点が1点でも存在する場合、つまりNINが0でない場合は、選択した3点P1〜P3は電柱の円柱面上の点ではないと判断する。一方、NINが0である場合は、当該3点P1〜P3に基づいて得られた円(中心Cα及び半径Rα)について円周上の点の数NONを記録する。
【0059】
円柱面探索手段28はブロック空間内の残余点群から選択する任意の3点P1〜P3の全ての組み合わせについて上記計算を行い、円周上の点の数NONが最も多い円柱面を当該ブロック空間における電柱の円柱面の候補とする。
【0060】
候補となる円柱面が特定された場合、つまりその中心Cαが算出できた場合は(S206にて「Yes」の場合)、再探索処理が行われる。一方、中心Cαが算出できなかった場合は(S206にて「No」の場合)、電柱抽出処理S82を終了する。
【0061】
図9は、再探索処理が行われる再探索空間の一例を示す模式図である。図9は、対象空間を上から見た図であり、水平面内での或るブロック空間の配置(矩形50)、再探索空間の配置(矩形60)、及び電柱の円柱面から得られる点群62の分布が示されている。再探索空間は、水平断面の中心を円柱面探索手段28により特定された中心Cαに一致させ、また矩形60の一辺を矩形50より10cm程度大きく設定される。これにより、再探索空間には、ブロック空間にて検出された円柱面候補についてその表面に存在する点群としてブロック空間内に存在する点群だけでなく、その隣接空間に存在する点群まで取り込むことができる。
【0062】
図8を用いて、円柱面探索手段28による初回の探索処理(S200〜S206)に続く再探索処理を説明する。再探索空間設定手段30は再探索空間を設定し、当該空間内に存在する点群が処理対象点群としてRAM等の作業領域に読み込まれる(S208)。円柱面再探索手段32は再探索空間内の処理対象点群に基づいて円柱面の中心Cβ及び半径Rβを求める処理を行う(S210)。この処理は、基本的に初回の探索処理S204と同様に行うことができる。円周全体を包含し得る再探索空間を用い、かつ初回検索にて円柱面の候補が検出された点群が用いられるので、再探索処理は初回よりも好適な精度で円柱面を検出できる可能性が高い。また、精度向上のために本実施形態では、点群から4点P1〜P4を選択し、それら4点を通る円を断面とする円柱面を探索する。当該4点を通る円柱面が特定された場合、つまりその中心Cβが算出できた場合は(S212にて「Yes」の場合)、再探索空間の中心をCαからCβにずらして(S214)、これにより位置が修正された再探索空間内の点群のうち中心Cβ及び半径Rβで定義される円柱面の表面上に存在する上述の円柱面点群を抽出する(S216)。
【0063】
電柱抽出処理S82は処理S216にて円柱面点群を抽出すると終了する。また、ブロック空間内に処理対象とする点群が存在しない場合(S202にて「No」の場合)、及び中心Cα又はCβを算出できない場合(S206及びS212のいずれかにて「No」の場合)には円柱面点群を抽出せずに終了する。
【0064】
注目部分空間に設定される複数段のブロック空間について上述の電柱抽出処理S82を行い、円柱面点群が抽出されると、既に述べたように円柱形状決定手段34が当該円柱面点群に基づいて、円柱面を特定するパラメータとして中心C、半径R、最大高度AH及び最小高度ALを求める(S86〜S90)。
【0065】
円柱形状決定手段34は当該パラメータによって特定される円柱面の形状を表すワイヤーフレームモデルを生成し(S92)、円柱地物登録手段36は当該モデルを構成するラインを記憶装置6に登録する(S94)。図10は電柱形状の登録処理の概略のフロー図である。中心C及び半径Rで定義される円を近似した多角形のラインが生成される(S250)。この生成したラインの位置に既に他の図形が登録済みではないか調べられる(S252)。他の図形が登録済みである場合は(S254にて「Yes」の場合)、電柱と他の地物との領域が重複していることを意味し検出結果が正しくないことが推定される。よって、この場合は電柱形状の登録は行わない。一方、他の図形が登録済みでない場合は(S254にて「No」の場合)、電柱形状を表すワイヤーモデルを構成するラインを登録する(S256)。具体的には、電柱の円柱面の最大高度AHでの断面の円を近似するライン、最小高度ALでの断面の円を近似するライン、及びそれら最大高度の円を近似する多角形の頂点と最小高度の円を近似する多角形の頂点とを結ぶ電柱側面のラインが求められ登録される(S256)。
【0066】
以上説明した電柱検索処理は上述したように一次部分空間及び二次部分空間について行われる。二次部分空間は基本的には一次部分空間に対してずれた位置に設定され、互いにずれた部分空間について電柱検索処理を行うことで、いずれか一方の電柱検索処理では抽出漏れとなる電柱を他方の電柱検索処理で抽出することが可能となる。すなわち、一次部分空間についての電柱検索処理と二次部分空間についての電柱検索処理とが互いに補完して電柱を好適に検出することが可能となる。
【0067】
具体的には、電柱の円柱面の全周のうちレーザスキャナで走査される範囲は一般には一部であり、例えば、比較的狭い中心角の円弧状の面から得られた点群が、複数の部分空間に跨がって位置すると各部分空間に分割された点群は壁面と誤認識されやすい。当該誤認識が起こると当該点群は壁面判定S78で除去され、電柱として抽出されない。これに対して、部分空間をずらして設定することで、円弧状の面から得られた点群を分割されないようにしたり分割数を減らしたりすることができ、壁面と判定されにくくすることができる。
【0068】
また、電柱は例えば、家屋への電線引き込みのため軒先に設置される場合がある。勾配屋根の軒先から得られる点群は水平面内での分布範囲が広く、また高さ方向の分布範囲は狭いため、壁面と判定されにくい。そのため、電柱抽出処理S82の処理対象となるブロック空間内の点群に屋根の点群が混入し、円柱面を好適に抽出できないことが起こり得る。この場合も、部分空間をずらせば、いずれかの部分空間では電柱以外の点群の影響が軽減され電柱を抽出できる可能が高まる。
【0069】
なお、上述したように通常、電柱はテーパー形状であり、コンクリート製の電柱は例えば、75cm上に行くほど直径が1cm小さくなる。既に述べたように、ΔRの設定にはこれを考慮することが好適である。具体的には、円柱面の初回の探索や再探索を行うブロック空間や再探索空間の高さHBでの直径の変化量の1/2をΔRに含めることができる。また、円柱面の半径RαやRβについて上述の実施形態では10cm前後と仮定して円柱面の断面の円を特定した。この仮定に係る半径を処理対象とするブロック空間や再探索空間が設定される高度に応じて変化させてもよい。また、上述の処理S86では、高さ方向の複数段の再探索空間それぞれから抽出された円柱面点群を水平面に射影して中心C及び半径Rを求めた。これに対し、それら複数段から抽出された円柱面点群が存在する円柱面がテーパーを有していることを前提として、処理S86を当該円柱面点群の三次元分布に適合する円錐面を算出する処理に代えてもよい。
【0070】
以上、円柱形状の地物を抽出する本発明を電柱を抽出するシステムを例に説明したが、本発明は電柱以外の円柱形状地物の抽出に用いることもでき、例えば、道路標識や街路灯の支柱の検出に適用することもできる。
【符号の説明】
【0071】
2 電柱抽出システム、4 演算処理装置、6 記憶装置、8 入力装置、10 出力装置、20 部分空間設定手段、22 部分空間選択手段、24 ブロック空間設定手段、26 壁面探索手段、28 円柱面探索手段、30 再探索空間設定手段、32 円柱面再探索手段、34 円柱形状決定手段、36 円柱地物登録手段。
【特許請求の範囲】
【請求項1】
対象空間における地物表面の三次元形状を表す点群データに基づいて、円柱形状を有する目的地物を検出するデータ解析装置であって、
前記対象空間を垂直面で分割して、柱状の複数の部分空間を設定する部分空間設定手段と、
前記部分空間のうち前記目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する部分空間選択手段と、
前記注目部分空間の水平面内における線分のうち、当該水平面に射影された前記点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する壁面探索手段と、
前記点群のうち前記壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、前記目的地物の円柱面の位置を探索する円柱面探索手段と、
を有することを特徴とするデータ解析装置。
【請求項2】
請求項1に記載のデータ解析装置において、
前記注目部分空間を水平面で分割して、縦に積み重なる複数のブロック空間を設定するブロック空間設定手段を有し、
前記壁面探索手段は、前記ブロック空間ごとに壁面位置を探索し、
前記円柱面探索手段は、前記壁面位置が検出されなかった前記ブロック空間内の前記点群を前記残余点群として前記円柱面の位置を探索すること、
を特徴とするデータ解析装置。
【請求項3】
請求項2に記載のデータ解析装置において、
前記壁面探索手段は、前記ブロック空間に隣接する空間における前記点群集中線分であって、当該ブロック空間にて検出された前記点群集中線分に連なる連接線分を探索し、当該連接線分が存在する場合に、当該ブロック空間の前記点群集中線分を前記壁面位置と推定すること、を特徴とするデータ解析装置。
【請求項4】
請求項2又は請求項3に記載のデータ解析装置において、
前記ブロック空間にて前記円柱面の位置が検出された場合に、当該ブロック空間に対応する高さに位置し、かつ前記目的地物の水平断面を包含する大きさの水平断面を有する柱状の再探索空間を、当該円柱面の中心軸を中心として設定する再探索空間設定手段と、
前記再探索空間内の前記点群の前記水平面内での分布に基づいて当該円柱面の位置を求め、前記点群のうち当該円柱面の表面上に存在する円柱面点群を抽出する円柱面再探索手段と、
を有することを特徴とするデータ解析装置。
【請求項5】
請求項4に記載のデータ解析装置において、
前記ブロック空間に対応して抽出された前記円柱面点群に基づいて、前記円柱面の三次元形状を求める円柱形状決定手段を有すること、を特徴とするデータ解析装置。
【請求項6】
対象空間における地物表面の三次元形状を表す点群データに基づいて、円柱形状を有する目的地物を検出するデータ解析方法であって、
前記対象空間を垂直面で分割して、柱状の複数の部分空間を設定する部分空間設定ステップと、
前記部分空間のうち前記目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する部分空間選択ステップと、
前記注目部分空間の水平面内における線分のうち、当該水平面に射影された前記点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する壁面探索ステップと、
前記点群のうち前記壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、前記目的地物の円柱面の位置を探索する円柱面探索ステップと、
を有することを特徴とするデータ解析方法。
【請求項7】
コンピュータに、対象空間における地物表面の三次元形状を表す点群データに基づいて、円柱形状を有する目的地物を検出する処理を行わせるためのプログラムであって、当該コンピュータを、
前記対象空間を垂直面で分割して、柱状の複数の部分空間を設定する部分空間設定手段、
前記部分空間のうち前記目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する部分空間選択手段、
前記注目部分空間の水平面内における線分のうち、当該水平面に射影された前記点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する壁面探索手段、及び
前記点群のうち前記壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、前記目的地物の円柱面の位置を探索する円柱面探索手段、として機能させることを特徴とするプログラム。
【請求項1】
対象空間における地物表面の三次元形状を表す点群データに基づいて、円柱形状を有する目的地物を検出するデータ解析装置であって、
前記対象空間を垂直面で分割して、柱状の複数の部分空間を設定する部分空間設定手段と、
前記部分空間のうち前記目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する部分空間選択手段と、
前記注目部分空間の水平面内における線分のうち、当該水平面に射影された前記点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する壁面探索手段と、
前記点群のうち前記壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、前記目的地物の円柱面の位置を探索する円柱面探索手段と、
を有することを特徴とするデータ解析装置。
【請求項2】
請求項1に記載のデータ解析装置において、
前記注目部分空間を水平面で分割して、縦に積み重なる複数のブロック空間を設定するブロック空間設定手段を有し、
前記壁面探索手段は、前記ブロック空間ごとに壁面位置を探索し、
前記円柱面探索手段は、前記壁面位置が検出されなかった前記ブロック空間内の前記点群を前記残余点群として前記円柱面の位置を探索すること、
を特徴とするデータ解析装置。
【請求項3】
請求項2に記載のデータ解析装置において、
前記壁面探索手段は、前記ブロック空間に隣接する空間における前記点群集中線分であって、当該ブロック空間にて検出された前記点群集中線分に連なる連接線分を探索し、当該連接線分が存在する場合に、当該ブロック空間の前記点群集中線分を前記壁面位置と推定すること、を特徴とするデータ解析装置。
【請求項4】
請求項2又は請求項3に記載のデータ解析装置において、
前記ブロック空間にて前記円柱面の位置が検出された場合に、当該ブロック空間に対応する高さに位置し、かつ前記目的地物の水平断面を包含する大きさの水平断面を有する柱状の再探索空間を、当該円柱面の中心軸を中心として設定する再探索空間設定手段と、
前記再探索空間内の前記点群の前記水平面内での分布に基づいて当該円柱面の位置を求め、前記点群のうち当該円柱面の表面上に存在する円柱面点群を抽出する円柱面再探索手段と、
を有することを特徴とするデータ解析装置。
【請求項5】
請求項4に記載のデータ解析装置において、
前記ブロック空間に対応して抽出された前記円柱面点群に基づいて、前記円柱面の三次元形状を求める円柱形状決定手段を有すること、を特徴とするデータ解析装置。
【請求項6】
対象空間における地物表面の三次元形状を表す点群データに基づいて、円柱形状を有する目的地物を検出するデータ解析方法であって、
前記対象空間を垂直面で分割して、柱状の複数の部分空間を設定する部分空間設定ステップと、
前記部分空間のうち前記目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する部分空間選択ステップと、
前記注目部分空間の水平面内における線分のうち、当該水平面に射影された前記点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する壁面探索ステップと、
前記点群のうち前記壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、前記目的地物の円柱面の位置を探索する円柱面探索ステップと、
を有することを特徴とするデータ解析方法。
【請求項7】
コンピュータに、対象空間における地物表面の三次元形状を表す点群データに基づいて、円柱形状を有する目的地物を検出する処理を行わせるためのプログラムであって、当該コンピュータを、
前記対象空間を垂直面で分割して、柱状の複数の部分空間を設定する部分空間設定手段、
前記部分空間のうち前記目的地物の高さに応じて予め設定された閾値以上の高さにまで点群が分布するものを注目部分空間として選択する部分空間選択手段、
前記注目部分空間の水平面内における線分のうち、当該水平面に射影された前記点群が予め設定した基準以上に近傍に集まる点群集中線分を探索し、当該点群集中線分を地物の壁面の水平面内での位置と推定する壁面探索手段、及び
前記点群のうち前記壁面に対応するものを除いた残余点群を求め、水平面内での当該残余点群の分布に基づいて、前記目的地物の円柱面の位置を探索する円柱面探索手段、として機能させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−64688(P2013−64688A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−204402(P2011−204402)
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
[ Back to top ]