
トランスミッション試験装置
【課題】装置全体で駆動用ダイナモメータの速度が脈動するのを防止できるトランスミッション試験装置を提供する。
【解決手段】駆動用・吸収用ダイナモメータ3,4を有し、駆動用ダイナモメータ3側には速度検出部が、また吸収用ダイナモメータ4側にはトルク検出部が配置されている。これらダイナモメータ3,4の制御部は速度フィードバック指令部8aとトルクフィードバック指令部8bとトルク補償部13とからなっている。速度フィードバック指令部8aは駆動用ダイナモメータ3の速度を、またトルクフィードバック指令部8bは吸収用ダイナモメータ4の負荷を制御している。トルク補償部13は、駆動用ダイナモメータ3に生じる速度偏差から補償トルク指令値を得て吸収用ダイナモメータ4に与えている。
【解決手段】駆動用・吸収用ダイナモメータ3,4を有し、駆動用ダイナモメータ3側には速度検出部が、また吸収用ダイナモメータ4側にはトルク検出部が配置されている。これらダイナモメータ3,4の制御部は速度フィードバック指令部8aとトルクフィードバック指令部8bとトルク補償部13とからなっている。速度フィードバック指令部8aは駆動用ダイナモメータ3の速度を、またトルクフィードバック指令部8bは吸収用ダイナモメータ4の負荷を制御している。トルク補償部13は、駆動用ダイナモメータ3に生じる速度偏差から補償トルク指令値を得て吸収用ダイナモメータ4に与えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車、トラック等の車両に使用されるトランスミッションの入力側および出力側に、それぞれ駆動用ダイナモメータ、吸収用ダイナモメータを配置して実車走行時を模擬した試験を行うトランスミッション試験装置、特に所定試験速度に対応する一定の速度指令値を駆動用ダイナモメータに与えるとき、装置全体のダイナモメータの速度が脈動するのを防止できるトランスミッション試験装置に関するものである。
【背景技術】
【0002】
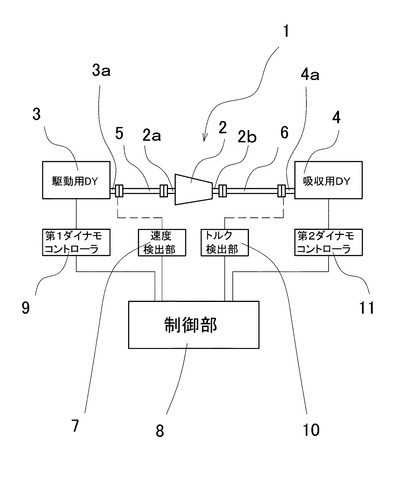
従来、自動車、トラック等の車両に使用されるトランスミッションの性能試験や耐久試験の試験装置としては、図3に示すトランスミッション試験装置1がある。このトランスミッション試験装置1は、試験対象のトランスミッション2を保持する治具(図示せず)、この治具を挟むように対向して配置された駆動用ダイナモメータ3および吸収用ダイナモメータ4を有している。前記駆動用ダイナモメータ3はエンジン(図示せず)に代わる模擬回転を発生するものであり、その模擬制御精度を向上させるためにその慣性モーメントは小さくなっている。この駆動用ダイナモメータ3の駆動軸3aには軸受部(図示せず)により回転自在に保持された第1伝達軸5を介してトランスミッション2の入力軸2aが連結されている。また、前記吸収用ダイナモメータ4の駆動軸4aには軸受部(図示せず)により回転自在に保持された第2伝達軸6を介してトランスミッション2の出力軸2bが連結されており、駆動用ダイナモメータ3の駆動軸3aと吸収用ダイナモメータ4の駆動軸4aとがトランスミッション2を介して一体に連結されている。さらに、この吸収用ダイナモメータ4は前記構成に加え、駆動用ダイナモメータ3とともに駆動されるときトルクを発生させて、駆動用ダイナモメータ3の駆動軸3aの回転を吸収できるように構成されている。
【0003】
前記駆動用ダイナモメータ3の駆動軸3aの周囲には駆動軸3aの速度を検出する速度検出部7が配置されており、その検出値が後記制御部8に送られるように構成されている。また、駆動用ダイナモメータ3にはインバータでなる第1ダイナモコントローラ9が接続されており、駆動用ダイナモメータ3に駆動電流を供給するように構成されている。
【0004】
一方、前記吸収用ダイナモメータ4は実車走行時に発生する各種負荷に代わる模擬負荷を発生するものであり、その慣性モーメントは駆動用ダイナモメータ3よりも十分大きくなっている。この吸収用ダイナモメータ4の駆動軸4aの周囲には駆動軸4aに加わるトルクを検出するトルク検出部10が配置されており、その検出値が制御部8に送られるように構成されている。また、前記吸収用ダイナモメータ4にはインバータでなる第2ダイナモコントローラ11が接続されており、吸収用ダイナモメータ4に駆動電流を供給するように構成されている。
【0005】
前記速度検出部7およびトルク検出部10は制御部8に接続されており、この制御部8は図4に示すように速度フィードバック指令部8aと、トルクフィードバック指令部8bとからなっている。前記速度フィードバック指令部8aは、設定速度指令値を第1ダイナモコントローラ9に送るように構成されている。また、速度フィードバック指令部8aは速度検出部7で検出した検出値を実際の速度としてフィードバックし、駆動用ダイナモメータ3の駆動軸3aの速度を前記設定速度指令値に保持するように構成されている。
【0006】
前記トルクフィードバック指令部8bは、設定トルク指令値を第2ダイナモコントローラ11に送るとともに、トルク検出部10で検出したトルク値を実際のトルクとしてフィードバックし、吸収用ダイナモメータ4の負荷を設定トルク指令値に保持するように構成されている。また、前記トルクフィードバック指令部8bは、設定トルク指令値と実際のトルク値とのトルク偏差がゼロになるようにトルク偏差にゲインをかけてPI制御してトルク指令値を生成し、これを第2ダイナモコントローラ11に送り、吸収用ダイナモメータ4の駆動軸4aに加わるトルクを設定トルク指令値に保持するように構成されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2000−314681号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
前記トランスミッション試験装置1では、駆動用ダイナモメータ3と吸収用ダイナモメータ4とはそれぞれ所定の設定速度、設定トルクに保持されるようにフィードバック制御される。この時、過渡時の応答性を上げるため、速度フィードバック指令部8aのフィードバックゲインを大きくしているが、速度制御のフィードバックゲインが大きいため小さな速度偏差でも駆動用ダイナモメータ3が大きいトルクで速度修正する。また、トランスミッション2の変速比が小さいときには、特に駆動用ダイナモメータ3側の慣性モーメントに対して吸収用ダイナモメータ4側の慣性モーメントが大きくなるため、速度の脈動が発生し、各種試験を正確に行えないという欠点がある。
【0009】
本発明の第1の目的は、このような欠点を除去することであり、所定試験速度に対応する一定の速度指令値を駆動用ダイナモメータに与えるとき、装置全体のダイナモメータの速度が脈動するのを防止できるトランスミッション試験装置を提供することである。
【課題を解決するための手段】
【0010】
本発明は、第1の目的を達成するために、所定試験位置を挟むように駆動用ダイナモメータおよび吸収用ダイナモメータを配置し、駆動用ダイナモメータ側に速度検出部を配置し、吸収用ダイナモメータ側にトルク検出部を配置する一方、
速度検出部およびトルク検出部を制御部に接続し、この制御部を駆動用ダイナモメータの速度フィードバック指令部と吸収用ダイナモメータのトルクフィードバック指令部とトルク補償部とから構成したものであって、前記速度フィードバック指令部で速度検出部の検出値に応じて駆動用ダイナモメータに速度指令値を送って駆動用ダイナモメータの速度を保持するように構成し、前記トルクフィードバック指令部でトルク検出部の検出値に応じて吸収用ダイナモメータにトルク指令値を送って吸収用ダイナモメータの負荷を設定トルク指令値に保持するように構成し、前記トルク補償部で駆動用ダイナモメータの設定速度指令値と速度検出部で検出される実際の速度との速度偏差を補償トルク指令値に変換して、この補償トルク指令値を吸収用ダイナモメータに与えるように構成したことを特徴とする。
【0011】
このように構成すると、駆動用ダイナモメータの速度偏差に応じて慣性モーメントの大きい吸収用ダイナモメータがダイナモメータの速度の脈動を抑える方向にトルクを出すため、ダイナモメータの速度の脈動を直ちに抑制でき、駆動用ダイナモメータの過渡時の応答性を高く保ちながら装置全体のダイナモメータの速度が脈動するのを防止でき、トランスミッションの各種試験を正確に行うことができる。
【0012】
また、前記設定トルク指令値は、実車走行時の走行抵抗に対応する模擬負荷を発生する値であってもよい。
【0013】
さらに、前記トルクフィードバック指令部に、実車走行時の状況を正確に模擬するための各種情報を抵抗指令値に変換する電気慣性発生部を接続してもよく、この場合前述の効果に加えて実車走行時の模擬状況を正確に実現できる。
【発明の効果】
【0014】
以上説明した本発明によれば、自動車、トラック等の車両に使用されるトランスミッションの入力側および出力側にそれぞれ駆動用ダイナモメータ、吸収用ダイナモメータを配置して実車走行時を模擬した試験を行うトランスミッション試験装置であって、特に所定試験速度に対応する一定の速度指令値を駆動用ダイナモメータに与えるとき、装置全体のダイナモメータの速度が脈動するのを防止できるトランスミッション試験装置を提供することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施形態にかかるトランスンミッション試験装置の制御部を示す概略ブロック図
【図2】本発明の第2の実施形態にかかるトランスンミッション試験装置の制御部を示す概略ブロック図
【図3】従来例のトランスミッション試験装置の全体構成図
【図4】従来例のトランスミッション試験装置の制御部を説明する概略ブロック図
【発明を実施するための形態】
【0016】
以下、本発明の実施形態を、図面を参照して説明する。
【0017】
<第1の実施形態>
この第1の実施形態のトランスミッション試験装置の全体構成は従来例と同一で、すでに説明済みであるが、符号を同一にして説明する。
【0018】
図3に示すように、この第1の実施形態のトランスミッション試験装置1は、試験対象のトランスミッション2を保持する治具(図示せず)、この治具を挟むように対向して配置された駆動用ダイナモメータ3および吸収用ダイナモメータ4を有している。前記駆動用ダイナモメータ3はエンジン(図示せず)に代わる模擬回転を発生するものであり、その模擬制御精度を向上させるためにその慣性モーメントは小さくなっている。この駆動用ダイナモメータ3の駆動軸3aには軸受部(図示せず)により回転自在に保持された第1伝達軸5を介してトランスミッション2の入力軸2aが連結されている。前記吸収用ダイナモメータ4の駆動軸4aには軸受部(図示せず)により回転自在に保持された第2伝達軸6を介してトランスミッション2の出力軸2bが連結されており、駆動用ダイナモメータ3の駆動軸3aと吸収用ダイナモメータ4の駆動軸4aとがトランスミッション2を介して一体に連結されている。この構成に加え、吸収用ダイナモメータ4は駆動用ダイナモメータ3とともに駆動されるとき、吸収用ダイナモメータ4に発生するトルクに相当する駆動用ダイナモメータ3の駆動軸3aの回転を吸収できるように構成されている。また、前記トランスミッション2の入力軸2aおよび出力軸2bは、それぞれ第1伝達軸5、第2伝達軸6と着脱可能に連結されており、トランスミッション2の交換が容易にできるように構成されている。
【0019】
前記駆動用ダイナモメータ3の駆動軸3aの周囲には駆動軸3aの速度を検出する速度検出部7が配置されており、その検出値が後記制御部8に送られるように構成されている。また、前記駆動用ダイナモメータ3にはインバータでなる第1ダイナモコントローラ9が接続されており、駆動用ダイナモメータ3に駆動電流を供給するように構成されている。
【0020】
前記吸収用ダイナモメータ4は実車走行時に例えばタイヤの速度に対応する走行抵抗に代わる模擬負荷を発生するものであり、その慣性モーメントは駆動用ダイナモメータ3よりも十分大きくなっている。また、この吸収用ダイナモメータ4の駆動軸4aの周囲には駆動軸4aに加わるトルクを検出するトルク検出部10が配置されており、その検出値が制御部8に送られるように構成されている。さらに、吸収用ダイナモメータ4にはインバータでなる第2ダイナモコントローラ11が接続されており、吸収用ダイナモメータ4に駆動電流を供給するように構成されている。
【0021】
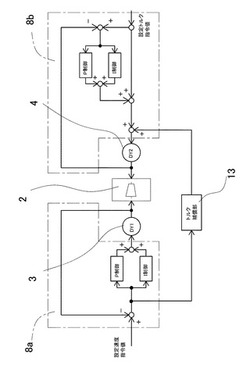
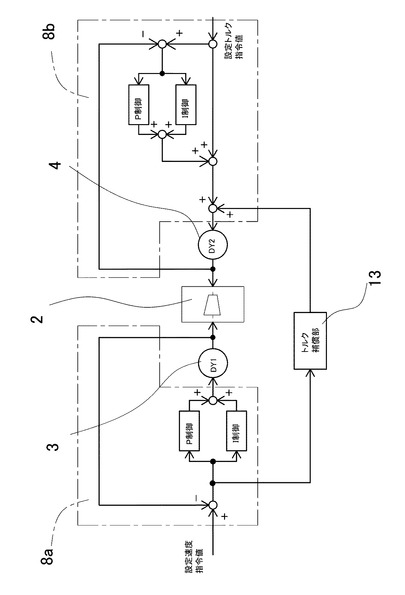
前記速度検出部7およびトルク検出部10は制御部8に接続されており、この制御部8は図1に示すように速度フィードバック指令部8aとトルクフィードバック指令部8bとから構成されている。前記速度フィードバック指令部8aは、設定速度指令値を第1ダイナモコントローラ9に送るとともに、速度検出部7で検出した検出値を実際の速度としてフィードバックするように構成されている。また、速度フィードバック指令部8aは設定速度指令値と実際の速度との速度偏差をPI制御して速度指令値を生成し、これを第1ダイナモコントローラ9に送って駆動用ダイナモメータ3の駆動軸3aの速度が前記設定速度指令値に保持されるように構成されている。前記PI制御は、周知の比例制御と積分制御でなるもので、目標値との偏差に応じてフィードバックゲインを比例させるとともに、偏差が小さくなると偏差の積分値にも比例してフィードバックゲインを得るように構成されている。これにより、駆動用ダイナモメータ3は速度偏差に基づいて比例制御、積分制御それぞれで計算される値の和をトルク指令値としてフィードバックし、その速度を制御する構成となっている。
【0022】
前記トルクフィードバック指令部8bは設定トルク指令値を吸収用ダイナモメータ4に送るとともに、トルク検出部10で検出したトルク値を実際のトルクとしてフィードバックするように構成されている。また、トルクフィードバック指令部8bは前述の設定速度指令値の場合と同様に、設定トルク指令値と実際のトルク値とのトルク偏差がゼロになるようにトルク偏差にゲインをかけてPI制御してトルク指令値(以下、生成トルク指令値という)を生成し、これを第2ダイナモコントローラ11に送り、吸収用ダイナモメータ4の駆動軸4aに加わるトルクを設定トルク指令値に保持するように構成されている。前記PI制御は駆動用ダイナモメータ3に接続されたものと同様の構成をしており、吸収用ダイナモメータ4の駆動軸4aに加わるトルクを制御する構成となっている。
【0023】
前記制御部8は速度フィードバック指令部8aとトルクフィードバック指令部8bとに接続されるトルク補償部13を有している。このトルク補償部13は、駆動用ダイナモメータ3への設定速度指令値と速度検出部7の検出値との速度偏差をゼロにするように速度偏差にゲインをかけてP制御で補償トルク指令値を算出し、この補償トルク指令値を前記トルクフィードバック指令部8bに送り、トルクフィードバック指令部8bで生成される生成トルク指令値に加えるように構成されている。なお、前記補償トルク指令値の算出方法はP制御に限定されるものではなく、PI制御、PID制御のいずれであってもよい。
【0024】
上記トランスミッション試験装置では、トランスミッション2の各種試験を行う際に、制御部8から設定速度指令値が速度フィードバック指令部8aに送られる。速度フィードバック指令部8aは設定速度指令値と速度検出部7の検出値との速度偏差に応じた速度指令値を第1ダイナモコントローラ9に送る。同時に、駆動用ダイナモメータ3の駆動軸3aの実際の速度がPI制御を介してフィードバック制御され、設定速度指令値に対応した試験速度に保持するように速度指令値を第1ダイナモコントローラ9に送る。第1ダイナモコントローラ9は前記速度指令値に対応した駆動電流を駆動用ダイナモメータ3に供給し、駆動用ダイナモメータ3が回転してその回転がエンジンに代わる模擬回転としてトランスミッション2に与えられる。
【0025】
一方、前記制御部8からトルクフィードバック指令部8bに設定トルク指令値が送られる。トルクフィードバック指令部8bは、設定トルク指令値とトルク検出部10の検出値とのトルク偏差に応じたトルク指令値を第2ダイナモコントローラ11に送る。同時に、トルク検出部10で吸収用ダイナモメータ4の駆動軸4aに加わる実際のトルクが検出され、これがPI制御を介してフィードバック制御され、設定トルク指令値に応じた負荷を保持するように生成トルク指令値が第2ダイナモコントローラ11に送られる。この第2ダイナモコントローラ11は吸収用ダイナモメータ4に前記生成トルク指令値に対応した駆動電流を供給する。そのため、この駆動電流に対応する負荷がトランスミッション2の出力軸2bに加わり、駆動用ダイナモメータ3の駆動軸3aの回転が吸収される。
【0026】
また、駆動用ダイナモメータ3には設定速度指令値に応じた速度を保持するように駆動電流が供給されるが、過渡時の応答性を上げるため、速度フィードバック指令部8aのフィードバックゲインは大きくなっている。これにともない、駆動用ダイナモメータ3の速度の脈動は大きくなり始める。この脈動の間、設定速度指令値と駆動用ダイナモメータ3の駆動軸3aが持つ実際の速度との速度偏差がトルク補償部13に送られ、このトルク補償部13で前記速度偏差をゼロにするように速度偏差にゲインをかけてP制御で補償トルク指令値が算出(速度偏差から補償トルク指令値に変換)され、生成トルク指令値に加えられる。すなわち、速度偏差が正の値の場合補償トルク指令値が生成トルク指令値に加算され、これが負の値の場合には補償トルク指令値が生成トルク指令値から減算される。この時、トランスミッション2の変速比が小さいときには特に駆動用ダイナモメータ3側の慣性モーメントに対して吸収用ダイナモメータ4の慣性モーメントが大きいため、吸収用ダイナモメータ4が発生する生成トルク指令値を前記補償トルク指令値分増減させると、ダイナモメータの速度は直ちに制御される。この制御により、ダイナモメータの速度の脈動が抑制されるので、ダイナモメータの過渡時の応答性を高く保ちながら、速度が脈動するのを防止でき、トランスミッション2の各種試験を正確に行うことができる。
【0027】
以上説明したように、本発明の実施形態は所定試験位置を挟むように駆動用ダイナモメータ3および吸収用ダイナモメータ4を配置し、駆動用ダイナモメータ3側に速度検出部7を配置し、吸収用ダイナモメータ4側にトルク検出部10を配置する一方、速度検出部7およびトルク検出部10を制御部8に接続し、この制御部8を駆動用ダイナモメータ3の速度フィードバック指令部8aと吸収用ダイナモメータ3のトルクフィードバック指令部8bとトルク補償部13とから構成したものであって、前記速度フィードバック指令部8aで速度検出部7の検出値に応じて駆動用ダイナモメータ3に速度指令値を送って駆動用ダイナモメータ3の速度を設定速度指令値に保持するように構成し、前記トルクフィードバック指令部8bでトルク検出部10の検出値に応じて吸収用ダイナモメータ4にトルク指令値を送って吸収用ダイナモメータ4の負荷を設定トルク指令値に保持するように構成し、前記トルク補償部13で駆動用ダイナモメータ3の設定速度指令値と速度検出部7で検出される実際の速度との速度偏差を補償トルク指令値に変換して、この補償トルク指令値を吸収用ダイナモメータ4に与えるように構成したことを特徴としている。そのため、駆動用ダイナモメータ3の速度偏差に応じて慣性モーメントの大きい吸収用ダイナモメータ4のトルクが増減するので、ダイナモメータの速度の脈動を直ちに抑制でき、ダイナモメータの過渡時の応答性を高く保ちながら、速度が脈動するのを防止でき、トランスミッション2の各種試験を正確に行うことができる。
【0028】
<第2の実施形態>
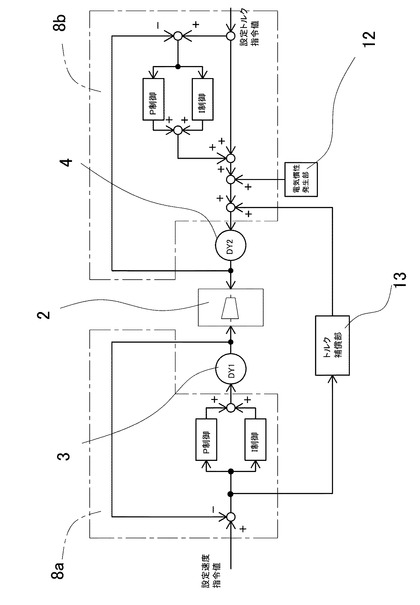
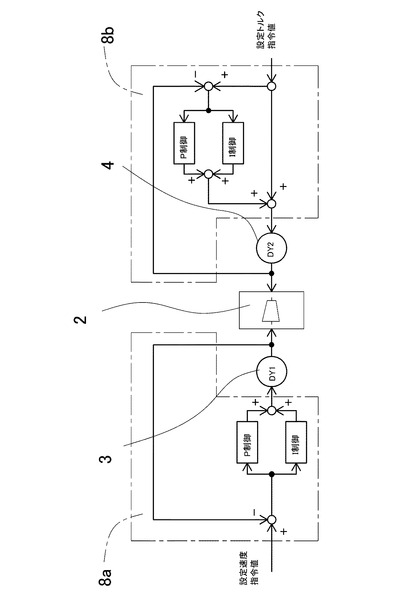
この第2の実施形態のトランスミッション試験装置は、第1の実施形態と構成を同じくするので、説明を省略する。その特徴とするところは、図示はしないが、駆動側ダイナモメータから自動車等のエンジンの模擬回転を速度指令値として与え、吸収側ダイナモメータから実車走行時の走行抵抗に応じた負荷をトルク指令値として与えるところにある。また、図2に示すように駆動側ダイナモメータ3から自動車等のエンジンの模擬回転を速度指令値として与え、吸収側ダイナモメータ4から実車走行時の走行抵抗に応じた負荷をトルク指令値として与えるとともに、前記吸収側ダイナモメータ4を制御するトルクフィードバック指令部8bに前記走行抵抗に応じた負荷に加えてその他の実車走行時の状況を正確に模擬するための各種情報を抵抗指令値に変換する電気慣性発生部12が接続されてもよい。
【0029】
この構成により、実車走行時のエンジンの設定速度を脈動させることなく、また実車走行時の走行抵抗等各種条件に対応した模擬負荷を安定して与えることができるので、トランスミッションの試験を実車走行時と同様に行うことができる。
【0030】
前記トルクフィードバック指令部に、実車走行時の状況を正確に模擬するための各種情報を抵抗指令値に変換する電気慣性発生部を接続してもよく、この場合前述の効果に加えて実車走行時の模擬状況を正確に実現できる。
【0031】
なお、本発明の幾つかの実施形態について説明したが、各部の具体的な構成は、上述した実施形態のみに限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【符号の説明】
【0032】
1…トランスミッション試験装置
3…駆動用ダイナモメータ
4…吸収用ダイナモメータ
7…速度検出部
8…制御部
8a…速度フィードバック指令部
8b…トルクフィードバック指令部
10…トルク検出部
13…トルク補償部
【技術分野】
【0001】
本発明は、自動車、トラック等の車両に使用されるトランスミッションの入力側および出力側に、それぞれ駆動用ダイナモメータ、吸収用ダイナモメータを配置して実車走行時を模擬した試験を行うトランスミッション試験装置、特に所定試験速度に対応する一定の速度指令値を駆動用ダイナモメータに与えるとき、装置全体のダイナモメータの速度が脈動するのを防止できるトランスミッション試験装置に関するものである。
【背景技術】
【0002】
従来、自動車、トラック等の車両に使用されるトランスミッションの性能試験や耐久試験の試験装置としては、図3に示すトランスミッション試験装置1がある。このトランスミッション試験装置1は、試験対象のトランスミッション2を保持する治具(図示せず)、この治具を挟むように対向して配置された駆動用ダイナモメータ3および吸収用ダイナモメータ4を有している。前記駆動用ダイナモメータ3はエンジン(図示せず)に代わる模擬回転を発生するものであり、その模擬制御精度を向上させるためにその慣性モーメントは小さくなっている。この駆動用ダイナモメータ3の駆動軸3aには軸受部(図示せず)により回転自在に保持された第1伝達軸5を介してトランスミッション2の入力軸2aが連結されている。また、前記吸収用ダイナモメータ4の駆動軸4aには軸受部(図示せず)により回転自在に保持された第2伝達軸6を介してトランスミッション2の出力軸2bが連結されており、駆動用ダイナモメータ3の駆動軸3aと吸収用ダイナモメータ4の駆動軸4aとがトランスミッション2を介して一体に連結されている。さらに、この吸収用ダイナモメータ4は前記構成に加え、駆動用ダイナモメータ3とともに駆動されるときトルクを発生させて、駆動用ダイナモメータ3の駆動軸3aの回転を吸収できるように構成されている。
【0003】
前記駆動用ダイナモメータ3の駆動軸3aの周囲には駆動軸3aの速度を検出する速度検出部7が配置されており、その検出値が後記制御部8に送られるように構成されている。また、駆動用ダイナモメータ3にはインバータでなる第1ダイナモコントローラ9が接続されており、駆動用ダイナモメータ3に駆動電流を供給するように構成されている。
【0004】
一方、前記吸収用ダイナモメータ4は実車走行時に発生する各種負荷に代わる模擬負荷を発生するものであり、その慣性モーメントは駆動用ダイナモメータ3よりも十分大きくなっている。この吸収用ダイナモメータ4の駆動軸4aの周囲には駆動軸4aに加わるトルクを検出するトルク検出部10が配置されており、その検出値が制御部8に送られるように構成されている。また、前記吸収用ダイナモメータ4にはインバータでなる第2ダイナモコントローラ11が接続されており、吸収用ダイナモメータ4に駆動電流を供給するように構成されている。
【0005】
前記速度検出部7およびトルク検出部10は制御部8に接続されており、この制御部8は図4に示すように速度フィードバック指令部8aと、トルクフィードバック指令部8bとからなっている。前記速度フィードバック指令部8aは、設定速度指令値を第1ダイナモコントローラ9に送るように構成されている。また、速度フィードバック指令部8aは速度検出部7で検出した検出値を実際の速度としてフィードバックし、駆動用ダイナモメータ3の駆動軸3aの速度を前記設定速度指令値に保持するように構成されている。
【0006】
前記トルクフィードバック指令部8bは、設定トルク指令値を第2ダイナモコントローラ11に送るとともに、トルク検出部10で検出したトルク値を実際のトルクとしてフィードバックし、吸収用ダイナモメータ4の負荷を設定トルク指令値に保持するように構成されている。また、前記トルクフィードバック指令部8bは、設定トルク指令値と実際のトルク値とのトルク偏差がゼロになるようにトルク偏差にゲインをかけてPI制御してトルク指令値を生成し、これを第2ダイナモコントローラ11に送り、吸収用ダイナモメータ4の駆動軸4aに加わるトルクを設定トルク指令値に保持するように構成されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2000−314681号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
前記トランスミッション試験装置1では、駆動用ダイナモメータ3と吸収用ダイナモメータ4とはそれぞれ所定の設定速度、設定トルクに保持されるようにフィードバック制御される。この時、過渡時の応答性を上げるため、速度フィードバック指令部8aのフィードバックゲインを大きくしているが、速度制御のフィードバックゲインが大きいため小さな速度偏差でも駆動用ダイナモメータ3が大きいトルクで速度修正する。また、トランスミッション2の変速比が小さいときには、特に駆動用ダイナモメータ3側の慣性モーメントに対して吸収用ダイナモメータ4側の慣性モーメントが大きくなるため、速度の脈動が発生し、各種試験を正確に行えないという欠点がある。
【0009】
本発明の第1の目的は、このような欠点を除去することであり、所定試験速度に対応する一定の速度指令値を駆動用ダイナモメータに与えるとき、装置全体のダイナモメータの速度が脈動するのを防止できるトランスミッション試験装置を提供することである。
【課題を解決するための手段】
【0010】
本発明は、第1の目的を達成するために、所定試験位置を挟むように駆動用ダイナモメータおよび吸収用ダイナモメータを配置し、駆動用ダイナモメータ側に速度検出部を配置し、吸収用ダイナモメータ側にトルク検出部を配置する一方、
速度検出部およびトルク検出部を制御部に接続し、この制御部を駆動用ダイナモメータの速度フィードバック指令部と吸収用ダイナモメータのトルクフィードバック指令部とトルク補償部とから構成したものであって、前記速度フィードバック指令部で速度検出部の検出値に応じて駆動用ダイナモメータに速度指令値を送って駆動用ダイナモメータの速度を保持するように構成し、前記トルクフィードバック指令部でトルク検出部の検出値に応じて吸収用ダイナモメータにトルク指令値を送って吸収用ダイナモメータの負荷を設定トルク指令値に保持するように構成し、前記トルク補償部で駆動用ダイナモメータの設定速度指令値と速度検出部で検出される実際の速度との速度偏差を補償トルク指令値に変換して、この補償トルク指令値を吸収用ダイナモメータに与えるように構成したことを特徴とする。
【0011】
このように構成すると、駆動用ダイナモメータの速度偏差に応じて慣性モーメントの大きい吸収用ダイナモメータがダイナモメータの速度の脈動を抑える方向にトルクを出すため、ダイナモメータの速度の脈動を直ちに抑制でき、駆動用ダイナモメータの過渡時の応答性を高く保ちながら装置全体のダイナモメータの速度が脈動するのを防止でき、トランスミッションの各種試験を正確に行うことができる。
【0012】
また、前記設定トルク指令値は、実車走行時の走行抵抗に対応する模擬負荷を発生する値であってもよい。
【0013】
さらに、前記トルクフィードバック指令部に、実車走行時の状況を正確に模擬するための各種情報を抵抗指令値に変換する電気慣性発生部を接続してもよく、この場合前述の効果に加えて実車走行時の模擬状況を正確に実現できる。
【発明の効果】
【0014】
以上説明した本発明によれば、自動車、トラック等の車両に使用されるトランスミッションの入力側および出力側にそれぞれ駆動用ダイナモメータ、吸収用ダイナモメータを配置して実車走行時を模擬した試験を行うトランスミッション試験装置であって、特に所定試験速度に対応する一定の速度指令値を駆動用ダイナモメータに与えるとき、装置全体のダイナモメータの速度が脈動するのを防止できるトランスミッション試験装置を提供することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施形態にかかるトランスンミッション試験装置の制御部を示す概略ブロック図
【図2】本発明の第2の実施形態にかかるトランスンミッション試験装置の制御部を示す概略ブロック図
【図3】従来例のトランスミッション試験装置の全体構成図
【図4】従来例のトランスミッション試験装置の制御部を説明する概略ブロック図
【発明を実施するための形態】
【0016】
以下、本発明の実施形態を、図面を参照して説明する。
【0017】
<第1の実施形態>
この第1の実施形態のトランスミッション試験装置の全体構成は従来例と同一で、すでに説明済みであるが、符号を同一にして説明する。
【0018】
図3に示すように、この第1の実施形態のトランスミッション試験装置1は、試験対象のトランスミッション2を保持する治具(図示せず)、この治具を挟むように対向して配置された駆動用ダイナモメータ3および吸収用ダイナモメータ4を有している。前記駆動用ダイナモメータ3はエンジン(図示せず)に代わる模擬回転を発生するものであり、その模擬制御精度を向上させるためにその慣性モーメントは小さくなっている。この駆動用ダイナモメータ3の駆動軸3aには軸受部(図示せず)により回転自在に保持された第1伝達軸5を介してトランスミッション2の入力軸2aが連結されている。前記吸収用ダイナモメータ4の駆動軸4aには軸受部(図示せず)により回転自在に保持された第2伝達軸6を介してトランスミッション2の出力軸2bが連結されており、駆動用ダイナモメータ3の駆動軸3aと吸収用ダイナモメータ4の駆動軸4aとがトランスミッション2を介して一体に連結されている。この構成に加え、吸収用ダイナモメータ4は駆動用ダイナモメータ3とともに駆動されるとき、吸収用ダイナモメータ4に発生するトルクに相当する駆動用ダイナモメータ3の駆動軸3aの回転を吸収できるように構成されている。また、前記トランスミッション2の入力軸2aおよび出力軸2bは、それぞれ第1伝達軸5、第2伝達軸6と着脱可能に連結されており、トランスミッション2の交換が容易にできるように構成されている。
【0019】
前記駆動用ダイナモメータ3の駆動軸3aの周囲には駆動軸3aの速度を検出する速度検出部7が配置されており、その検出値が後記制御部8に送られるように構成されている。また、前記駆動用ダイナモメータ3にはインバータでなる第1ダイナモコントローラ9が接続されており、駆動用ダイナモメータ3に駆動電流を供給するように構成されている。
【0020】
前記吸収用ダイナモメータ4は実車走行時に例えばタイヤの速度に対応する走行抵抗に代わる模擬負荷を発生するものであり、その慣性モーメントは駆動用ダイナモメータ3よりも十分大きくなっている。また、この吸収用ダイナモメータ4の駆動軸4aの周囲には駆動軸4aに加わるトルクを検出するトルク検出部10が配置されており、その検出値が制御部8に送られるように構成されている。さらに、吸収用ダイナモメータ4にはインバータでなる第2ダイナモコントローラ11が接続されており、吸収用ダイナモメータ4に駆動電流を供給するように構成されている。
【0021】
前記速度検出部7およびトルク検出部10は制御部8に接続されており、この制御部8は図1に示すように速度フィードバック指令部8aとトルクフィードバック指令部8bとから構成されている。前記速度フィードバック指令部8aは、設定速度指令値を第1ダイナモコントローラ9に送るとともに、速度検出部7で検出した検出値を実際の速度としてフィードバックするように構成されている。また、速度フィードバック指令部8aは設定速度指令値と実際の速度との速度偏差をPI制御して速度指令値を生成し、これを第1ダイナモコントローラ9に送って駆動用ダイナモメータ3の駆動軸3aの速度が前記設定速度指令値に保持されるように構成されている。前記PI制御は、周知の比例制御と積分制御でなるもので、目標値との偏差に応じてフィードバックゲインを比例させるとともに、偏差が小さくなると偏差の積分値にも比例してフィードバックゲインを得るように構成されている。これにより、駆動用ダイナモメータ3は速度偏差に基づいて比例制御、積分制御それぞれで計算される値の和をトルク指令値としてフィードバックし、その速度を制御する構成となっている。
【0022】
前記トルクフィードバック指令部8bは設定トルク指令値を吸収用ダイナモメータ4に送るとともに、トルク検出部10で検出したトルク値を実際のトルクとしてフィードバックするように構成されている。また、トルクフィードバック指令部8bは前述の設定速度指令値の場合と同様に、設定トルク指令値と実際のトルク値とのトルク偏差がゼロになるようにトルク偏差にゲインをかけてPI制御してトルク指令値(以下、生成トルク指令値という)を生成し、これを第2ダイナモコントローラ11に送り、吸収用ダイナモメータ4の駆動軸4aに加わるトルクを設定トルク指令値に保持するように構成されている。前記PI制御は駆動用ダイナモメータ3に接続されたものと同様の構成をしており、吸収用ダイナモメータ4の駆動軸4aに加わるトルクを制御する構成となっている。
【0023】
前記制御部8は速度フィードバック指令部8aとトルクフィードバック指令部8bとに接続されるトルク補償部13を有している。このトルク補償部13は、駆動用ダイナモメータ3への設定速度指令値と速度検出部7の検出値との速度偏差をゼロにするように速度偏差にゲインをかけてP制御で補償トルク指令値を算出し、この補償トルク指令値を前記トルクフィードバック指令部8bに送り、トルクフィードバック指令部8bで生成される生成トルク指令値に加えるように構成されている。なお、前記補償トルク指令値の算出方法はP制御に限定されるものではなく、PI制御、PID制御のいずれであってもよい。
【0024】
上記トランスミッション試験装置では、トランスミッション2の各種試験を行う際に、制御部8から設定速度指令値が速度フィードバック指令部8aに送られる。速度フィードバック指令部8aは設定速度指令値と速度検出部7の検出値との速度偏差に応じた速度指令値を第1ダイナモコントローラ9に送る。同時に、駆動用ダイナモメータ3の駆動軸3aの実際の速度がPI制御を介してフィードバック制御され、設定速度指令値に対応した試験速度に保持するように速度指令値を第1ダイナモコントローラ9に送る。第1ダイナモコントローラ9は前記速度指令値に対応した駆動電流を駆動用ダイナモメータ3に供給し、駆動用ダイナモメータ3が回転してその回転がエンジンに代わる模擬回転としてトランスミッション2に与えられる。
【0025】
一方、前記制御部8からトルクフィードバック指令部8bに設定トルク指令値が送られる。トルクフィードバック指令部8bは、設定トルク指令値とトルク検出部10の検出値とのトルク偏差に応じたトルク指令値を第2ダイナモコントローラ11に送る。同時に、トルク検出部10で吸収用ダイナモメータ4の駆動軸4aに加わる実際のトルクが検出され、これがPI制御を介してフィードバック制御され、設定トルク指令値に応じた負荷を保持するように生成トルク指令値が第2ダイナモコントローラ11に送られる。この第2ダイナモコントローラ11は吸収用ダイナモメータ4に前記生成トルク指令値に対応した駆動電流を供給する。そのため、この駆動電流に対応する負荷がトランスミッション2の出力軸2bに加わり、駆動用ダイナモメータ3の駆動軸3aの回転が吸収される。
【0026】
また、駆動用ダイナモメータ3には設定速度指令値に応じた速度を保持するように駆動電流が供給されるが、過渡時の応答性を上げるため、速度フィードバック指令部8aのフィードバックゲインは大きくなっている。これにともない、駆動用ダイナモメータ3の速度の脈動は大きくなり始める。この脈動の間、設定速度指令値と駆動用ダイナモメータ3の駆動軸3aが持つ実際の速度との速度偏差がトルク補償部13に送られ、このトルク補償部13で前記速度偏差をゼロにするように速度偏差にゲインをかけてP制御で補償トルク指令値が算出(速度偏差から補償トルク指令値に変換)され、生成トルク指令値に加えられる。すなわち、速度偏差が正の値の場合補償トルク指令値が生成トルク指令値に加算され、これが負の値の場合には補償トルク指令値が生成トルク指令値から減算される。この時、トランスミッション2の変速比が小さいときには特に駆動用ダイナモメータ3側の慣性モーメントに対して吸収用ダイナモメータ4の慣性モーメントが大きいため、吸収用ダイナモメータ4が発生する生成トルク指令値を前記補償トルク指令値分増減させると、ダイナモメータの速度は直ちに制御される。この制御により、ダイナモメータの速度の脈動が抑制されるので、ダイナモメータの過渡時の応答性を高く保ちながら、速度が脈動するのを防止でき、トランスミッション2の各種試験を正確に行うことができる。
【0027】
以上説明したように、本発明の実施形態は所定試験位置を挟むように駆動用ダイナモメータ3および吸収用ダイナモメータ4を配置し、駆動用ダイナモメータ3側に速度検出部7を配置し、吸収用ダイナモメータ4側にトルク検出部10を配置する一方、速度検出部7およびトルク検出部10を制御部8に接続し、この制御部8を駆動用ダイナモメータ3の速度フィードバック指令部8aと吸収用ダイナモメータ3のトルクフィードバック指令部8bとトルク補償部13とから構成したものであって、前記速度フィードバック指令部8aで速度検出部7の検出値に応じて駆動用ダイナモメータ3に速度指令値を送って駆動用ダイナモメータ3の速度を設定速度指令値に保持するように構成し、前記トルクフィードバック指令部8bでトルク検出部10の検出値に応じて吸収用ダイナモメータ4にトルク指令値を送って吸収用ダイナモメータ4の負荷を設定トルク指令値に保持するように構成し、前記トルク補償部13で駆動用ダイナモメータ3の設定速度指令値と速度検出部7で検出される実際の速度との速度偏差を補償トルク指令値に変換して、この補償トルク指令値を吸収用ダイナモメータ4に与えるように構成したことを特徴としている。そのため、駆動用ダイナモメータ3の速度偏差に応じて慣性モーメントの大きい吸収用ダイナモメータ4のトルクが増減するので、ダイナモメータの速度の脈動を直ちに抑制でき、ダイナモメータの過渡時の応答性を高く保ちながら、速度が脈動するのを防止でき、トランスミッション2の各種試験を正確に行うことができる。
【0028】
<第2の実施形態>
この第2の実施形態のトランスミッション試験装置は、第1の実施形態と構成を同じくするので、説明を省略する。その特徴とするところは、図示はしないが、駆動側ダイナモメータから自動車等のエンジンの模擬回転を速度指令値として与え、吸収側ダイナモメータから実車走行時の走行抵抗に応じた負荷をトルク指令値として与えるところにある。また、図2に示すように駆動側ダイナモメータ3から自動車等のエンジンの模擬回転を速度指令値として与え、吸収側ダイナモメータ4から実車走行時の走行抵抗に応じた負荷をトルク指令値として与えるとともに、前記吸収側ダイナモメータ4を制御するトルクフィードバック指令部8bに前記走行抵抗に応じた負荷に加えてその他の実車走行時の状況を正確に模擬するための各種情報を抵抗指令値に変換する電気慣性発生部12が接続されてもよい。
【0029】
この構成により、実車走行時のエンジンの設定速度を脈動させることなく、また実車走行時の走行抵抗等各種条件に対応した模擬負荷を安定して与えることができるので、トランスミッションの試験を実車走行時と同様に行うことができる。
【0030】
前記トルクフィードバック指令部に、実車走行時の状況を正確に模擬するための各種情報を抵抗指令値に変換する電気慣性発生部を接続してもよく、この場合前述の効果に加えて実車走行時の模擬状況を正確に実現できる。
【0031】
なお、本発明の幾つかの実施形態について説明したが、各部の具体的な構成は、上述した実施形態のみに限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【符号の説明】
【0032】
1…トランスミッション試験装置
3…駆動用ダイナモメータ
4…吸収用ダイナモメータ
7…速度検出部
8…制御部
8a…速度フィードバック指令部
8b…トルクフィードバック指令部
10…トルク検出部
13…トルク補償部
【特許請求の範囲】
【請求項1】
所定試験位置を挟むように駆動用ダイナモメータおよび吸収用ダイナモメータを配置し、駆動用ダイナモメータ側に速度検出部を配置し、吸収用ダイナモメータ側にトルク検出部を配置する一方、
速度検出部およびトルク検出部を制御部に接続し、この制御部を駆動用ダイナモメータの速度フィードバック指令部と吸収用ダイナモメータのトルクフィードバック指令部とトルク補償部とから構成したものであって、
前記速度フィードバック指令部で速度検出部の検出値に応じて駆動用ダイナモメータに速度指令値を送って駆動用ダイナモメータの速度を設定速度指令値に保持するように構成し、
前記トルクフィードバック指令部でトルク検出部の検出値に応じて吸収用ダイナモメータにトルク指令値を送って吸収用ダイナモメータの負荷を設定トルク指令値に保持するように構成し、
前記トルク補償部で駆動用ダイナモメータの設定速度指令値と速度検出部で検出される実際の速度との速度偏差を補償トルク指令値に変換して、この補償トルク指令値を吸収用ダイナモメータに与えるように構成したことを特徴とするトランスミッション試験装置。
【請求項2】
設定トルク指令値は、実車走行時の走行抵抗に対応する模擬負荷を発生する値であることを特徴とする請求項1に記載のトランスミッション試験装置。
【請求項3】
吸収用ダイナモメータを制御するトルクフィードバック指令部に実車走行時の状況を正確に模擬するための各種情報を抵抗指令値に変換する電気慣性発生部を接続したことを特徴とする請求項1または2に記載のトランスミッション試験装置。
【請求項1】
所定試験位置を挟むように駆動用ダイナモメータおよび吸収用ダイナモメータを配置し、駆動用ダイナモメータ側に速度検出部を配置し、吸収用ダイナモメータ側にトルク検出部を配置する一方、
速度検出部およびトルク検出部を制御部に接続し、この制御部を駆動用ダイナモメータの速度フィードバック指令部と吸収用ダイナモメータのトルクフィードバック指令部とトルク補償部とから構成したものであって、
前記速度フィードバック指令部で速度検出部の検出値に応じて駆動用ダイナモメータに速度指令値を送って駆動用ダイナモメータの速度を設定速度指令値に保持するように構成し、
前記トルクフィードバック指令部でトルク検出部の検出値に応じて吸収用ダイナモメータにトルク指令値を送って吸収用ダイナモメータの負荷を設定トルク指令値に保持するように構成し、
前記トルク補償部で駆動用ダイナモメータの設定速度指令値と速度検出部で検出される実際の速度との速度偏差を補償トルク指令値に変換して、この補償トルク指令値を吸収用ダイナモメータに与えるように構成したことを特徴とするトランスミッション試験装置。
【請求項2】
設定トルク指令値は、実車走行時の走行抵抗に対応する模擬負荷を発生する値であることを特徴とする請求項1に記載のトランスミッション試験装置。
【請求項3】
吸収用ダイナモメータを制御するトルクフィードバック指令部に実車走行時の状況を正確に模擬するための各種情報を抵抗指令値に変換する電気慣性発生部を接続したことを特徴とする請求項1または2に記載のトランスミッション試験装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−101048(P2013−101048A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244815(P2011−244815)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000002059)シンフォニアテクノロジー株式会社 (1,111)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000002059)シンフォニアテクノロジー株式会社 (1,111)
【Fターム(参考)】
[ Back to top ]