
ドップラーレーダシステム、及び物体検知方法
【課題】受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上する。
【解決手段】本発明に係るドップラーレーダシステム100は、送信アンテナ120と、複数の受信アンテナ121と、目標物体150に含まれる複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部105と、第1間隔を有する第1分割枠を用いて、測定点の第1重心116aを算出する第1重心算出部106aと、第1間隔より狭い第2間隔を有する第2分割枠を用いて、測定点の第2重心116bを算出する第2重心算出部106bと、複数の第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの第2重心116bを目標物体150の位置に決定する重心決定部107とを備える。
【解決手段】本発明に係るドップラーレーダシステム100は、送信アンテナ120と、複数の受信アンテナ121と、目標物体150に含まれる複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部105と、第1間隔を有する第1分割枠を用いて、測定点の第1重心116aを算出する第1重心算出部106aと、第1間隔より狭い第2間隔を有する第2分割枠を用いて、測定点の第2重心116bを算出する第2重心算出部106bと、複数の第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの第2重心116bを目標物体150の位置に決定する重心決定部107とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目標物体の位置を検知するドップラーレーダシステム、及び物体検知方法に関する。
【背景技術】
【0002】
近年、安全及び快適に暮らせる住環境、並びに社会インフラの整備が重視されるようになってきている。これに伴い、日常生活において、例えば高齢者の行動或いは動作を補助する支援機器、又は人間の負担を軽減するために働く自律型ロボットの実現が望まれるようになっている。
【0003】
実際の生活環境においては、人間又はその他多数の障害物が存在している。その中を移動機器又はロボットが走り回るためには、当該移動機器又はロボットと障害物との衝突を回避することが望まれる。つまり、それら移動機器又はロボットが効率的に障害物との衝突を避けたり、障害物の接近を警告したり、停止したりしながら、安全を確保することが強く望まれる。
【0004】
その一方で、そのような移動機器が走行する際に障害となる障害物のうち、運動又は行動を予測するのが困難なものは人間である。また、対人衝突は歩行者及び搭乗者の双方に与える影響が大きいという問題がある。
【0005】
このようなロボットは、見通しのよい空間よりも、火災で煙の立ちこめた環境、夜間の街灯のない暗闇、又は壁を隔てた空間など、通常とは異なる条件で活用されるので、このような条件でセンシングすることが求められている。すなわち、いかに劣悪な環境でも、人間をうまく検知し、その行動及び移動軌跡を予測できることが必要である。
【0006】
そのような環境にも適用できるセンシング手段としては、電波センサ(レーダ)がある。レーダは相対速度と相対距離とを同時かつ瞬時に計測可能であることから、特に自動車用のセンシングシステムとして既に実用化されている。
【0007】
レーダ(電波)を用いて歩行者など人間の形状及び運動を測定する試みとして、ドップラー(Doppler)シフトによる速度検知と、干渉計法による到来方向検知(DOA:Direction−of−Arrival)とを組み合わせたDDOA(Doppler and Direction−of−Arrival)法と呼ばれる方法が知られている(例えば、非特許文献1参照)。
【0008】
図24は、DDOA法を用いたレーダ装置の構成を示す図である。
【0009】
図24に示すレーダ装置901は、送信器910と、受信器920及び930と、送信アンテナ911と、受信アンテナ912及び913とを備える。
【0010】
レーダ装置901の検知対象は、被測定物931、932及び933である。送信器910は、ある周波数の探知電波を出射する。受信器920及び930は、当該探知電波が被測定物931〜933で反射された反射波を受信する。
【0011】
レーダ装置901に対して、被測定物931〜933がある視線方向速度で動いている場合、受信器920及び930で受信した反射波の周波数は、送信アンテナ911から放射された探知電波の周波数に対して、視線方向速度に対応する周波数だけシフトする。そのシフトした周波数(ドップラー周波数)から、被測定物931〜933のそれぞれの視線方向速度を検出できる。
【0012】
ここで、「視線方向速度」とは、被測定物931〜933が持つ速度のうち、レーダ装置901から被測定物への方向に沿った速度成分のことである。つまり、視線方向速度は、レーダ装置901に対する、被測定物931〜933の相対的な速度成分である。具体的には、図24に示すように、被測定物931〜933の速度をそれぞれV1、V2及びViとすると、被測定物931〜933の視線方向速度は、当速度V1、V2及びViをレーダ装置901から被測定物931〜933への方向に沿って分解した速度であるV1f、V2f及びVifである。
【0013】
つまり、レーダ装置901は、探知電波の周波数に対する、受信器920及び930で受信した反射波の周波数を用いて、被測定物931〜933の視線方向速度V1f、V2f及びVifを検出する。
【0014】
ところで、レーダ装置901は、図24に示すように、受信アンテナ及びその受信アンテナに対応する受信器を含む受信系統を2系統備えている。さらに、それぞれの受信アンテナ912及び913は、異なる場所に配置されている。
【0015】
これにより、各被測定物931〜933から受信アンテナ912までの距離と、当該被測定物931〜933から受信アンテナ913までの距離とは、互いに異なる。
【0016】
このように被測定物931〜933から2つの受信アンテナ912及び913までの距離が異なることで、被測定物931〜933の方向検出が可能になる。以下、この方向検出の原理について具体的に説明する。
【0017】
図24において、例えば、被測定物933は、受信アンテナ912より受信アンテナ913に近い位置に存在するので、被測定物933からの反射波は受信アンテナ912より受信アンテナ913に早く到着する。よって、受信アンテナ912で受信した反射波と受信アンテナ913で受信した反射波とを比較した場合、受信アンテナ912で受信した反射波は受信アンテナ913で受信した反射波より位相が遅れることになる。ここで、被測定物933が受信アンテナ912及び受信アンテナ913の正面からθiの方向にあり、2つの受信アンテナ912及び913が距離dだけ離れて配置されているとする。この場合、受信アンテナ912で受信した反射波と受信アンテナ913で受信した反射波との位相差は(式1)で表される。なお、φ1は受信アンテナ912で受信した反射波の位相であり、φ2は受信アンテナ913で受信した反射波の位相であり、λは送信アンテナ911から出射された探知電波の波長である。
【0018】
φ2−φ1=2πd×sinθ/λ ・・・(式1)
【0019】
この(式1)を変形すると、下記の(式2)となる。つまり、2つの受信アンテナ912及び913で受信した2つの反射波の位相差φ2−φ1から被測定物933の方向θを検出できる。
【0020】
θ=sin−1{(φ2−φ1)λ/(2πd)} ・・・(式2)
【0021】
これが干渉計法を用いたDOAの推定である。
【0022】
さらに、DDOAでは、各被測定物のドップラー周波数を検知する。そして、受信アンテナが受信した反射波のうち、各被測定物に対応するドップラー周波数の信号に対して、上記のDOAを行うことで、対応する被測定物の方向を検知できる。このように、従来のレーダ装置901は、複数の被測定物の識別したうえで、各被測定物の方向を検知することができる。
【0023】
なお、図24では、レーダ装置901は、2つの受信アンテナ912及び913を有するので1次元方向しか検知できないが、例えば受信アンテナ912と受信アンテナ913とを含む直線上以外に、もう一つの受信アンテナを配置することで、水平/垂直の2次元方向を検知することができる。
【0024】
このようなDDOAを、人体検知に用いた場合を考える。ここで、人間の腕、脚、胴体、及び頭部など、体を構成する部位は、それぞれ異なる速度で動く。よって、それぞれの運動を反映したドップラーシフトがスペクトルの微細な構造(マイクロドップラー)として観測可能である。これにより、その微細構造を分析及び解析することによって、人間の検出に加え、人間の動作同定を行うことができる。さらに、DDOAにより、人間とそれ以外の物体とを区別することもできる。このように、DDOAによるイメージングは、3つという数少ない受信アンテナのみを用いて3次元のイメージングが可能であるという利点がある。
【0025】
ところが、DDOAは、観測可能な全範囲を対象として、物体からの反射波に対するドップラーシフトの解析及び到来方向の推定を行うため、さまざまな干渉を受けやすい。そして、この干渉が、特に、到来方向の推定結果に与える影響が大きいという問題がある。
【0026】
具体的には、DDOAでは、ドップラー信号処理(周波数解析)を行ってドップラー周波数を解析した後、それぞれのドップラー周波数に対し、複数の受信アンテナ間の信号位相差を使って到来方向を推定する必要がある。したがって、観測範囲の中に同一のドップラー速度(すなわち、ドップラー周波数が同一となるときの速度)の物体が存在すると、反射波が相互に干渉した信号を受信することになる。よって、その受信信号からはそれぞれの物体の位相情報を独立して取り出せない。結果として到来方向の推定を正しく行えない。
【0027】
このような到来方向推定の誤りを軽減する技術として、受信アンテナをアレー化し、アレー信号処理を行う方法がある(例えば、非特許文献2参照。)。
【0028】
通常、2素子の受信アンテナを用いて観測領域内の2人の人間を測定すると、両者が同一の運動した場合に必ず偽像が発生する。そこで、このシステムでは、図25に示すようにCW(Continuous Wave)方式レーダをベースに4素子の1次元アンテナアレーを有するレーダ装置を構成する。さらに、当該レーダ装置は、CLEANアルゴリズム又はRELAXアルゴリズムを適用することで、2次元平面内で2人の歩行者を分離することができる。
【先行技術文献】
【非特許文献】
【0029】
【非特許文献1】A. Lin and H. Ling, ”Frontal imaging of human using three element Doppler and direction−of−arrival radar,” Electronics Letters, vol.42, no.11, pp.660-661, (2006).
【非特許文献2】Shobha Sundar Ram and Hao Ling, ”Through−Wall Tracking of Human Movers Using Joint Doppler and Array Processing”, IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 5, NO. 3, JULY 2008
【発明の概要】
【発明が解決しようとする課題】
【0030】
しかしながら、非特許文献2記載の従来のレーダ装置では、観測領域に存在する物体の個数が増加すると、それに応じて受信アンテナ素子の数を増加させる必要があるという課題がある。その結果、例えば、使用する電波の波長を1cm、アンテナ素子の間隔を半波長の0.5cmとしたとき、3素子を直角二等辺三角形に配置した構成の干渉計の最小サイズは概ね0.5cm四方に収まるが、横方向の素子数を10にした場合、最小サイズは0.5cm×4.5cmになる。
【0031】
そこで、本発明は、上記従来の課題を鑑み、受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上できるドップラーレーダシステムを提供することを目的とする。
【課題を解決するための手段】
【0032】
上記目的を達成するために、本発明の一形態に係るドップラーレーダシステムは、目標物体の位置を検知するドップラーレーダシステムであって、送信信号を生成する送信部と、前記送信信号を送信波として放射する送信アンテナと、前記送信波が、前記目標物体に含まれる複数の反射点で反射された反射波を各々が受信する複数の受信アンテナと、前記複数の受信アンテナで受信された複数の反射波の各々に対応する複数の受信信号を生成する受信部と、前記複数の受信信号間の位相差を用いて、前記ドップラーレーダシステムに対する前記複数の反射点の各々の方向を算出する方向算出部と、前記送信信号と前記受信信号との遅延量を用いて、前記ドップラーレーダシステムと前記複数の反射点との各々の距離を算出する距離算出部と、前記複数の反射点の各々の方向と距離とを用いて、前記複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部と、第1間隔を有する第1分割枠を用いて、前記複数の測定点うち、前記第1分割枠で分割された各第1分割領域に含まれる測定点の第1重心を算出する第1重心算出部と、前記第1間隔より狭い第2間隔を有する第2分割枠を用いて、前記複数の測定点のうち、前記第2分割枠で分割された各第2分割領域に含まれる測定点の第2重心を算出する第2重心算出部と、複数の前記第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定する重心決定部とを備える。
【0033】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上できる。
【0034】
また、前記第2間隔は、前記目標物体の幅の略2倍であり、前記第1間隔は、前記第2間隔の2倍以上であってもよい。
【0035】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、目標物体の個数に応じた第2重心を算出できる。
【0036】
また、前記第1分割枠は、第3分割枠と、前記第3分割枠と異なる第4分割枠とを含み、前記第2分割枠は、第5分割枠と、前記第5分割枠と異なる第6分割枠とを含み、前記第1重心算出部は、前記複数の測定点のうち、前記第3分割枠で分割された各第3分割領域に含まれる測定点の第3重心を算出し、複数の前記第3重心のうち、前記第4分割枠で分割された各第4分割領域に含まれる第3重心の重心を前記第1重心として算出し、前記第2重心算出部は、前記複数の測定点のうち、前記第5分割枠で分割された各第5分割領域に含まれる測定点の第5重心を算出し、複数の前記第5重心のうち、前記第6分割枠で分割された各第6分割領域に含まれる第5重心の重心を前記第2重心として算出してもよい。
【0037】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、分割枠の区切り位置の依存性を小さくできる。
【0038】
また、前記重心決定部は、前記第1重心の位置を基準に、前記複数の第2重心を第1グループと第2グループとに分割し、前記第1及び第2グループから、少なくとも1点ずつ第2重心を選択し、選択した前記第2重心を前記目標物体の位置に決定してもよい。
【0039】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、偽像が発生している場合の、物体の位置の検出精度を向上できる。
【0040】
また、前記重心決定部は、前記第1グループに含まれる第2重心と前記第2グループに含まれる第2重心とで構成されるペアごとに、当該ペアに含まれる2点の第2重心の重心であるペア重心を算出し、算出した複数のペア重心のうち、前記第1重心に最も近い前記ペア重心のペアを選択し、選択したペアに含まれる2点の第2重心を2つの前記目標物体の位置に決定してもよい。
【0041】
また、前記ドップラーレーダシステムは、さらに、前記重心決定部により決定された、過去の前記目標物体の位置を用いて、未来の前記目標物体の位置である予測位置を予測する追尾予測部を備え、前記追尾予測部は、前記ドップラーレーダシステムにより検知される目標物体の数を予測し、前記重心決定部は、前記複数の第2重心のうち、前記追尾予測部で予測された数の第2重心を前記目標物体の位置に決定してもよい。
【0042】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、追尾予測の結果を用いることで、物体の位置の検出精度を向上できる。
【0043】
また、前記重心決定部は、前記追尾予測部により予測された複数の前記予測位置の間に前記第1重心が存在する場合、前記複数の第2重心のうち、各前記予測位置に最も近い第2重心を前記目標物体の位置に決定し、前記追尾予測部により予測された複数の前記予測位置の間に前記第1重心が存在しない場合、前記複数の第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定してもよい。
【0044】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、追尾予測の結果に応じて、適切な処理を行える。
【0045】
また、前記重心決定部は、前記第1重心の位置を基準に、前記複数の第2重心を第1グループと第2グループとに分割し、前記第1重心の位置を基準に、複数の前記予測位置を第3グループと第4グループとに分割し、前記第1グループに含まれる複数の第2重心のうち、前記第3グループに含まれる各予測位置に最も近い第2重心と、前記第2グループに含まれる複数の第2重心のうち、前記第4グループに含まれる各予測位置に最も近い第2重心と、を前記目標物体の位置に決定してもよい。
【0046】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、目標物体の個数が3以上の場合でも、物体の位置の検出精度を向上できる。
【0047】
また、前記重心決定部は、前記第3グループ及び前記第4グループの両方に予測位置が含まれる場合、前記第1グループに含まれる複数の第2重心のうち、前記第3グループに含まれる各予測位置に最も近い第2重心と、前記第2グループに含まれる複数の第2重心のうち、前記第4グループに含まれる各予測位置に最も近い第2重心と、を前記目標物体の位置に決定し、前記第3グループにN(Nは3以上の整数)点の予測位置が含まれ、かつ前記第4グループに予測位置が含まれない場合、前記第1グループに含まれるN−1点の第2重心と、前記第2グループに含まれる1点の第2重心と、を前記目物体の位置に決定してもよい。
【0048】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、目標物体の個数が3以上の場合でも、物体の位置の検出精度を向上できる。
【0049】
また、前記重心決定部は、同一の距離レンジに複数の予測位置が含まれる場合、前記複数の第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定し、同一の距離レンジに一つの予測位置のみが含まれる場合、前記第2重心を前記目標物体の位置に決定してもよい。
【0050】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、偽像が発生するか否かに応じて、適切な処理を行える。
【0051】
なお、本発明は、このようなドップラーレーダシステムとして実現できるだけでなく、ドップラーレーダシステムに含まれる特徴的な手段をステップとする物体検知方法として実現したり、そのような特徴的なステップをコンピュータに実行させるプログラムとして実現したりすることもできる。そして、そのようなプログラムは、CD−ROM等の非一時的なコンピュータ読み取り可能な記録媒体、及びインターネット等の伝送媒体を介して流通させることができるのは言うまでもない。
【0052】
さらに、本発明は、このようなドップラーレーダシステムの機能の一部又は全てを実現する半導体集積回路(LSI)として実現できる。
【発明の効果】
【0053】
本発明は、受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上できるドップラーレーダシステムを提供できる。
【図面の簡単な説明】
【0054】
【図1】本発明の実施の形態の利用シーンを示す図である。
【図2A】本発明の実施の形態に係る、干渉がない場合の測定点を示す図である。
【図2B】本発明の実施の形態に係る、干渉がある場合の測定点を示す図である。
【図3】本発明の実施の形態1に係るレーダシステムのブロック図である。
【図4】本発明の実施の形態1に係る目標物体検知処理のフローチャートである。
【図5A】本発明の実施の形態1に係るレンジ出力の構成を示す図である。
【図5B】本発明の実施の形態1に係る、蓄積されているレンジ出力を示す図である。
【図5C】本発明の実施の形態1に係るドップラー出力の構成を示す図である。
【図6】本発明の実施の形態1に係る到来方向の算出処理を説明するための図である。
【図7A】本発明の実施の形態1に係る方向出力の構成を示す図である。
【図7B】本発明の実施の形態1に係るマイクロドップラー出力の構成を示す図である。
【図8A】本発明の実施の形態1に係る、反射パワー比が小さい場合における測定点を示す図である。
【図8B】本発明の実施の形態1に係る、反射パワー比が大きい場合における測定点を示す図である。
【図9A】本発明の実施の形態1に係る、反射パワー比が小さい場合におけるDOA結果の分布を示す図である。
【図9B】本発明の実施の形態1に係る、反射パワー比が大きい場合におけるDOA結果の分布を示す図である。
【図10】本発明の実施の形態1に係る第1重心算出処理を説明するための図である。
【図11】本発明の実施の形態1に係る第2重心算出処理を説明するための図である。
【図12】本発明の実施の形態1に係る重心決定処理のフローチャートである。
【図13A】本発明の実施の形態1に係る重心決定処理を説明するための図である。
【図13B】本発明の実施の形態1に係る重心決定処理を説明するための図である。
【図14A】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図14B】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図14C】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図14D】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図15A】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図15B】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図15C】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図16A】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図16B】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図17】本発明の実施の形態2に係るレーダシステムのブロック図である。
【図18】本発明の実施の形態2に係る重心決定処理のフローチャートである。
【図19】本発明の実施の形態2に係る重心決定処理を説明するための図である。
【図20】本発明の実施の形態2に係る重心決定処理を説明するための図である。
【図21】本発明の実施の形態2に係る重心算出処理を説明するための図である。
【図22】本発明の実施の形態2の変形例に係る重心決定処理のフローチャートである。
【図23】本発明の実施の形態2の変形例に係る重心決定処理を説明するための図である。
【図24】従来のレーダ装置のブロック図である。
【図25】従来のレーダシステムのブロック図である。
【発明を実施するための形態】
【0055】
以下、本発明の実施の形態について、図面を用いて詳細に説明する。なお、以下で説明する実施の形態は、いずれも本発明の好ましい一具体例を示すものである。以下の実施の形態で示される数値、形状、材料、構成要素、構成要素の配置位置及び接続形態、ステップ、ステップの順序などは、一例であり、本発明を限定する主旨ではない。本発明は、請求の範囲だけによって限定される。よって、以下の実施の形態における構成要素のうち、本発明の最上位概念を示す独立請求項に記載されていない構成要素については、本発明の課題を達成するのに必ずしも必要ではないが、より好ましい形態を構成するものとして説明される。
【0056】
まず、本発明の実施の形態を説明する前に、用語を説明する。
【0057】
レーダシステムは、目標物体に向かって、送信アンテナから電波を放射する。送信アンテナから放射された電波は、目標物体の形状に応じて、さまざまな方向に散乱する。散乱した電波のうち受信アンテナに到来する電波を特に、「反射波」と呼ぶ。目標物体において、反射波が反射した点を反射点と呼ぶ。レーダシステムは、反射波に基づいて、目標物体の情報を取得する。
【0058】
目標物体の表面は、多数の散乱点(表面散乱点)を有する。反射点は、反射条件に従って物理的に定まる散乱点(以降、物理的な反射点と呼ぶ)である。レーダシステムは、反射点の位置等を推定することで、目標物体の情報を取得する。
【0059】
目標物体の表面が鏡面の球体又は平板の場合、反射条件を満たす反射点は1つに定まる。一方、例えば、人のように電波の波長に比べて大きな凹凸を有する複雑な形状を有する目標物体の場合、反射条件を満たす点は物体上に複数あるので、複数の反射点が存在する。
【0060】
物理的な反射点と測定で求めた反射点との位置が著しく異なる場合があり、これを「偽像」と呼ぶ。本明細書において、物理的な反射点を単に「反射点」、測定から求まる反射点を「測定点」と表記する。
【0061】
図1は、レーダシステム100を用いて、2人の人間(目標物体150a、150b)を検知及び追尾する状況を示す模式図である。図1に示すレーダシステム100は、1つの送信アンテナ120と、3つの受信アンテナ121a、121b及び121cとを有する。以下、受信アンテナ121a、121b及び121cをまとめて受信アンテナ121と表記することがある。
【0062】
3つの受信アンテナ121は、互いの異なる方向の反射波を受信するように設置されている。具体的に、受信アンテナ121aと受信アンテナ121bとは水平方向に並んで配置されており、受信アンテナ121aと受信アンテナ121cとは、垂直方向に並んで配置されている。
【0063】
これにより、受信アンテナ121a及び受信アンテナ121bで受信した反射波から反射点の水平方向(すなわち方位角)を計測することができる。また、受信アンテナ121a(又は受信アンテナ121b)及び受信アンテナ121cで受信した反射波から、反射点の鉛直方向(すなわち仰角)を求めることができる。さらに、受信アンテナ121a、121b及び121cで受信した反射波の少なくとも一つから、レーダシステム100と目標物体との相対速度を計測できる。
【0064】
例えば、目標物体150a及び150bの運動速度V(視線方向のスカラー量)と位置S(空間座標のベクトル量)とを、<V,S>と表す。
【0065】
目標物体150aの頭部、腕、反対側の腕、脚、反対側の脚は、それぞれ、<V11,S11>、<V12,S12>、<V13,S13>、<V14,S14>、<V15,S15>として観測され、目標物体150bの頭部、腕、反対側の腕、脚、反対側の脚は、<V21,S21>、<V22,S22>、<V23,S23>、<V24,S24>、<V25,S25>として観測される。なお、実際の観測では、さらに細かい運動状態を取得可能であるが、模式図では簡略化している。
【0066】
人間の形状になるように仮想的な反射点を設定するとともに、それぞれの反射点に対して歩行運動データを与えることで、移動する歩行者を模擬したモデルを構築する。このモデルに対して、コンピュータ上で測定点を数値計算によって求め、2人の人間を観測した結果を図2A及び図2Bに示す。
【0067】
図2Aは、目標物体150aと目標物体150bとが存在し、そのドップラー速度に干渉がない場合を示す。図2Bは、目標物体150aと目標物体150bとが、ドップラー速度が同一となる反射点をそれぞれ有する場合、つまり干渉がある場合を示す。なお、図2A及び図2Bでは、3次元の<V,S>の分布を2次元平面に投影した結果(平面図)を示しており、各点が測定点に対応している。また、原点はレーダシステム100の位置を示す。
【0068】
図2Aに示すように、複数の人間(目標物体150aと目標物体150b)のドップラー速度が干渉しない場合、目標物体150aと目標物体150bとの測定点の分布のまとまりが明確であるため、容易に両者を分離できる。
【0069】
ところが、図2Bのように、複数の人間が同一のドップラー速度を含む場合、<V,S>の分布が大きく広がり、両者を分離することが困難になる。これが、ドップラー速度の干渉による偽像である。
【0070】
このように、到来方向推定結果に誤りがあると、物体の存在する方向又は物体の形状に関わる高さ或いは幅の推定を誤ることになり、イメージング結果が乱れてしまう。これをドップラー速度の干渉による偽像という。
【0071】
以下、本発明の実施の形態を説明する。
【0072】
(実施の形態1)
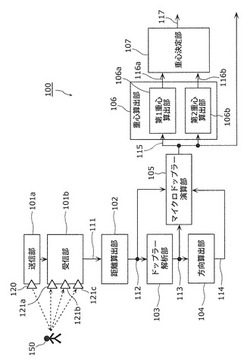
図3は、本発明の実施の形態1に係るレーダシステム100の構成を表すブロック図である。図3に示すレーダシステム100は、目標物体150の位置を特定するドップラーレーダシステムである。このレーダシステム100は、送信部101aと、受信部101bと、距離算出部102と、ドップラー解析部103と、方向算出部104と、マイクロドップラー演算部105と、第1重心算出部106aと、第2重心算出部106bと、重心決定部107と、送信アンテナ120と、受信アンテナ121a、121b及び121cとを備える。
【0073】
図3に示すレーダシステム100は、目標物体150の距離、方向、及びドップラー速度を測定する。ここで距離及び方向は、レーダシステム100を基準とした距離及び方向である。また、レーダシステム100は、距離及び方向から目標物体上の測定点の位置を定め、さらにその測定点のドップラー速度を対応させる。そして、レーダシステム100は、目標物体150を構成する測定点を複数取得することにより、目標物体150の形状及び動きを推定する。
【0074】
まず、レーダシステム100の動作の概略を説明する。
【0075】
図4は、レーダシステム100による目標物体を検出する処理のフローチャートである。
【0076】
まず、送信部101aは送信信号を生成する。そして、送信アンテナ120は、当該送信信号を送信波として放射する(S101)。
【0077】
複数の受信アンテナ121a、121b及び121cの各々は、送信波が目標物体150に含まれる複数の反射点で反射された反射波を受信する。そして、受信部101bは、複数の受信アンテナ121a、121b及び121cで受信された複数の反射波の各々に対応する複数の受信信号111を生成する(S102)。
【0078】
次に、距離算出部102は、送信信号と受信信号111との遅延量を用いて、ドップラーレーダシステム100と複数の反射点との距離を算出する(S103)。
【0079】
次に、ドップラー解析部103は、各受信信号の周波数成分を解析することで、各受信信号のドップラー周波数を算出する(S104)。
【0080】
次に、方向算出部104は、ドップラー周波数ごとの複数の受信信号間の位相差を用いて、ドップラーレーダシステム100に対する複数の反射点の方向を算出する(S105)。
【0081】
次に、マイクロドップラー演算部105は、ステップS103及びS105で算出された複数の反射点の方向と距離とを用いて、複数の反射点の位置を示す複数の測定点算出する(S106)。
【0082】
次に、第1重心算出部106aは、第1の第1間隔を有する第1分割枠を用いて、複数の測定点うち、第1分割枠で分割された各第1分割領域に含まれる測定点の第1重心116aを算出する(S107)。
【0083】
また、第2重心算出部106bは、第1間隔より狭い第2間隔を有する第2分割枠を用いて、複数の測定点のうち、第2分割枠で分割された各第2分割領域に含まれる測定点の第2重心116bを算出する(S108)。
【0084】
最後に、重心決定部107は、複数の第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの第2重心116bを目標物体150の位置に決定する(S109)。
【0085】
以下、各構成について、詳細に説明する。
【0086】
<送信部101a>
送信部101aは、所望の周波数帯の搬送波を用いて送信信号を生成する。所望の周波数帯とは、例えば、マイクロ波又はミリ波の周波数である。
【0087】
送信アンテナ120は、送信部101aが生成した送信信号を、外部空間に送信波として放射する。
【0088】
<受信部101b>
受信アンテナ121a〜121cは、目標物体150で反射した送信波である反射波を受信する。以下、送信アンテナ120から放射されて目標物体150に到達するまでの波を送信波と表記し、目標物体150で反射された波を反射波と表記する。
【0089】
受信部101bは、各受信アンテナ121が受信した反射波に応じた受信信号111を生成する。ここで、受信信号111は、受信アンテナ121a、121b及び121cの各々で受信した反射波に対応する3つの受信信号を含む。また、以下では、各受信アンテナに対応する信号及び処理部を受信チャネルとも呼ぶ。
【0090】
具体的には、受信部101bは、各受信チャネルの受信信号111ごとに以下の処理を行う。受信部101bは、上記搬送波と同一周波数の信号又は同一の搬送波を用いて、反射波を復調することにより、反射波を所定の周波数帯域の信号に変換する。そして、受信部101bはこの変換後の信号を受信信号111として出力する。ここで受信信号111は、反射の有無と距離に対応した信号振幅の変動を含んでいる。よって、この受信信号111から反射点までの距離を算出できる。また、所定の周波数帯域とは、周波数ゼロの直流成分を中心としてドップラー周波数を含む周波数帯域である。
【0091】
より具体的には、受信部101bは、搬送波を第1の信号と第2の信号とに分配する。また、受信部101bは、第1の信号の位相を90度ずらし、第2の信号の位相をずらさない。次に、受信部101bは、第1の信号及び第2の信号を用いて、反射波を復調することで、上記受信信号111として、第1の受信信号及び第2の受信信号を生成する。この第1の受信信号及び第2の受信信号は、互いに直交している。また、第2の受信信号111は、I相信号(In−Phase)を意味する。第1の受信信号111は、Q相信号(Quadrature)を意味する。つまり、各受信チャネルの受信信号111は、第2の受信信号を実部とし、第1の受信信号を虚部とする複素信号である。
【0092】
また、レーダシステム100は、少なくとも2つの受信アンテナ121a及び121bを備える。そして、レーダシステム100は、受信アンテナ121aで受信した反射波と、受信アンテナ121bで受信した反射波との位相差を用いて、2次元の平面又は3次元の空間上における測定点の分布を取得することにより、目標物体150の形状、速度、又は位置を測定する。なお、この詳細は後述する。
【0093】
なお、レーダシステム100は、受信アンテナ121の個数に応じて、距離算出部102及びドップラー解析部103を複数有してもよい。具体的には、レーダシステム100は、2つの受信アンテナ121の組を1チャネルとした時、チャネルの数に応じた数の距離算出部102及びドップラー解析部103を有する。
【0094】
例えば、レーダシステム100が受信アンテナ121a、121b、121cを有する場合、レーダシステム100は3チャネル有する。具体的には、受信アンテナ121aと受信アンテナ121bとの組、受信アンテナ121bと受信アンテナ121cとの組、及び、受信アンテナ121aと受信アンテナ121bとの組の3組である。このとき、レーダシステム100は、各チャネルに対応する3個のドップラー解析部を有する。
【0095】
<距離算出部102>
距離算出部102は、受信部101bから受信信号111を取得する。そして、距離算出部102は、送信信号と受信信号111との遅延量を用いて、レーダシステム100と複数の反射点との距離を算出する。
【0096】
ここで、送信部101aが生成する送信信号に応じて、目標物体150の位置を決定する方法が異なる。例えば、送信部101aが擬似雑音符号を用いて、搬送波を変調した送信信号を生成する場合、目標物体150の位置を測定する方法はスペクトル拡散方式である。
【0097】
一方、送信部101aが搬送波をチャープ変調した送信信号を生成する場合、目標物体150の位置を測定する方法はFM−CW(Frequency Modulated Continuous Wave)方式である。また、送信部101aが周波数の異なる搬送波を2種類用い、両者を交互に送信する場合、目標物体150の位置を測定する方法は2周波CW方式である。
【0098】
なお、送信部101aが搬送波を全く変調しない場合は、CW(Continuous Wave)方式となるが、CW方式では距離計測は原理上行えない。
【0099】
また、本実施の形態では、スペクトル拡散方式を用いる場合を例に説明する。
【0100】
スペクトル拡散方式レーダは、送信時には擬似雑音符号を用いて搬送波を変調(拡散)するとともに、受信時には反射波を復調(逆拡散)することにより擬似雑音符号を再生し、送受間での擬似雑音符号の遅延量を評価する。そして、該レーダは、その遅延量から目標物体までの距離を算出する。
【0101】
つまり、距離算出部102は、送信用の擬似雑音符号(以降、送信用符号)と、送信用符号をシフトさせた受信用の擬似雑音符号(以降、受信用符号)とを用い、電波の往来(すなわち反射)で生じる送信用符号の遅延を算出する。具体的には、距離算出部102は、送信用符号と受信用符号との相関を計算し、相関が予め定めた閾値以上の極大値となるときの受信用符号の符号シフト量から距離を算出する。また、反射波がない場合は閾値を超える極大値がないため、距離は定まらない。異なる距離からの反射波が到来した場合は、閾値を超える極大値が相等の個数だけ存在するので、それぞれの距離を定めることができる。
【0102】
スペクトラム拡散方式を用いた場合、距離算出部102は、以下の(式3)を用いて距離(R)を決定する。
【0103】
R=cD/2b ・・・(式3)
【0104】
ここで、b[bit/sec]([chip/sec])は擬似雑音符号のレートであり、D[bit]([chip])は相関最大時の符号シフト量であり、c[m/sec]は光速である。
【0105】
なお、シフト量D=1のときの値をレンジ分解能と呼ぶ。レンジ分解能を単位(レンジビンという)として離散的に距離Rが定まり、それぞれのレンジビンごとに独立して信号処理を行うことができるようになる。
【0106】
ここで、レンジ分解能をΔRとする。レーダシステム100が検出できる最大探知距離をRmaxとし、Mを整数とするとき、Rmax=M×ΔRと表される。また、iを1≦i≦Mの整数とすると、符号シフト量D=iに対応して、距離レンジR(i)=i×ΔRが定められる。この指標iを距離レンジ番号と呼ぶことにする。このように、距離レンジR(i)は、(i−1)×ΔR<r≦i×ΔRを満たす距離rの範囲を示している。
【0107】
また、距離算出部102の出力をレンジ出力112という。レンジ出力112も複素形式であるとする。
【0108】
なお、スペクトル拡散方式で無い場合には、距離レンジが単一のR(1)のみから構成されるとして扱い、R(1)にそれぞれの方式で計測された距離を割り当てておくとよい。また、CW方式のように距離情報を持たない場合、例えばR(1)=∞などのように、物理的に無意味な数値を割り当てておくとよい。
【0109】
なお、距離算出部102、並びに、後述するドップラー解析部103及び方向算出部104で行われる信号の処理結果は、記憶部(図示せず)に格納しておくとよい。さらに、各処理部が、この記憶部に対する、処理結果の追加、更新、及び消去できるように構成しておくとよい。このように記憶部を介することで、レンジ出力112の時系列データに対して、その観測の時間幅(すなわち窓長)を自在に設定できるようになる。
【0110】
図5Aは、レンジ出力112の構成を示す図である。図5Aに示すようにレンジ出力112は、距離レンジ番号ごとにIQ信号を含む。さらに、各IQ信号は、受信アンテナ121a〜121cの各々に対応する3つのIQ信号(sa(i)、sb(i)、sc(i))を含む。
【0111】
図5Bは、記憶部に記憶されるレンジ出力112を示す図である。図5Bに示すように、時系列のレンジ出力112が記憶部に蓄積される。
【0112】
<ドップラー解析部103>
ドップラー解析部103は、レンジ出力112の周波数成分を解析し、レンジ出力112に含まれるドップラー周波数成分と、そのパワー及び位相を算出し、算出結果をドップラー出力113として出力する。
【0113】
周波数解析の方法は、例えば高速フーリエ変換(FFT)である。設定された窓長内に限った現象を解析する場合、短時間フーリエ変換(STFT:Short−Time Fourier Transform)が用いられる。ここでは、このSTFTを単にFFTと表す。また、周波数の解析処理の意味をわかりやすく説明するために、このFFTをドップラー信号処理とも呼ぶ。
【0114】
以下、レンジ出力112に含まれる特定の距離レンジR(i)を取り出して、周波数解析を行う場合を説明する。
【0115】
ここで、図5Bに示すように、レンジ出力112は、時系列で記憶部に格納されている。Nを1以上の整数とするとき、ドップラー解析部103は、記憶部に格納されている複数のレンジ出力112のうち、最新のものからNセット選択する。例えば、距離レンジR(i)におけるレンジ出力(IQ信号)を記号s(i)で表し、サンプリング番号h(1≦h≦N)に対するIQ信号をs(i,h)と表すと、距離レンジR(i)におけるNサンプルの時系列信号が得られる。ただし、h=1が最新データ、h=Nが最古データとなるように指標付けを行うようにする。ドップラー解析部103は、このNサンプルの時系列信号s(i,h)(1≦h≦N)に対してFFTを行う。これは、距離レンジごとに窓長がNのFFTを行っていることに相当する。
【0116】
なお、記憶部の容量は有限であるから、不要になった古いIQ信号は記憶部から消去するようにしておくとよい。
【0117】
ここで、レンジ出力112は複素数であり、FFTの結果(ドップラースペクトル)は、レンジ出力112におけるパワーの周波数特性を表すパワースペクトルと、位相の周波数特性を表す位相スペクトルとを含む。
【0118】
したがって、解析されたドップラースペクトルを用いれば、スペクトルのピークを検出し、そのピーク位置(ドップラー周波数)に対するパワーと位相とを読み取ることができる。
【0119】
そして、ドップラー解析部103は、これらの情報を含むドップラー出力113を記憶部に格納する。
【0120】
図5Cは、ドップラー出力113の構成を示す図である。図5Cに示すように、ドップラー出力113は、ドップラースペクトルのピーク周波数(すなわちドップラー周波数)F、パワーP、及び位相φを含む。また、ピークは単一とは限らないので、これを集合{F,P,φ}のように表す。
【0121】
また、ドップラー解析部103は、ドップラースペクトルでピーク検出した際、ピークではない点のパワーPをゼロ又は負数(例えば、−1又は−P)に書き換えておくことで、パワーPが正数か否かによってピークか否かを判別できるようにしておく。また、ドップラー周波数の単位をドップラービンといい、その指標を「ドップラー周波数番号」と呼ぶことにする。
【0122】
このとき、ドップラー周波数番号kとドップラー周波数Fとの関係は一次関数で示される。例えば、FFTの周波数分解能がΔFで、ドップラー周波数番号N/2が直流成分(周波数ゼロ)であるとき、ドップラー周波数番号kに対応するドップラー周波数はF=(k−N/2)ΔFである。
【0123】
また、ドップラー周波数Fとドップラー速度Vdとは比例関係にあり、相互に換算することができる。例えば比例係数γにより、Vd=γFと表される。すなわち、ドップラー速度が同一か否かの議論は、ドップラー周波数が同一か否かの議論と同じであり、以降では「ドップラー周波数」を用いて説明する。ただし、「ドップラー速度の干渉」の場合は、「ドップラー速度」で表現している。
【0124】
このドップラー解析部103により、目標物体150を構成する複数の運動部位について、各々の運動速度の視線方向成分が明らかになる。
【0125】
ドップラー出力113は、受信チャネルの数だけ並列に存在している。例えば、受信チャネル数が3の場合、ドップラー出力113a、113b及び113cのように区別し、それぞれ受信アンテナ121a、121b及び121cと対応する。なお、ドップラー出力113とのみ表現した場合は、受信チャネルの区別なく、全てを含むとする。
【0126】
また、それと対応するようにドップラー出力113を構成する要素の集合K(一般に複数のピークを有する)をKa、Kb及びKcのように区別し、Ka={Fa,Pa,φa}、Kb={Fb,Pb,φb}、Kc={Fc,Pc,φc}のように表す。
【0127】
また、ドップラー周波数番号k(1≦k≦Nなる整数)と、距離レンジ番号i(1≦i≦M)とを用いて、集合の要素Ka(i,k)=(Fa(i,k),Pa(i,k),φa(i,k))のように表現する。なお、要素の指標を省略して、Ka(i,k)=(Fa,Pa,φa)のように簡略に表記する。これは、受信アンテナ121aで受信した信号の、レンジ出力112のi番目の距離レンジに対するドップラー信号処理の結果における、k番目の周波数Fa(i,k)と、それに対するパワーPa(i,k)、位相φa(i,k)を示す。他についても同様である。
【0128】
<方向算出部104>
方向算出部104は、複数の受信信号間の位相差を用いて、レーダシステム100に対する複数の反射点の方向を算出する。具体的には、方向算出部104は、ドップラー出力113a、113b及び113cを受け付ける。
【0129】
方向算出部104は、ドップラー出力113a、113b及び113cに含まれる位相φa、φb及びφcを用いて、各受信チャネル間の位相差を計算する。このとき、受信チャネル間の位相差は、Δφab=φb−φa、Δφac=φc−φaである。このようにドップラー出力113で対を形成し、当該対の位相を比較することは、「干渉計を構成」していることを意味する。
【0130】
なお、説明を簡略にするため、ここでは距離レンジ番号i及びドップラー周波数番号kによる指標(i,k)を省略して表記している。
【0131】
方向算出部104は、この位相差を用い、到来方向を算出する。
【0132】
図6は、到来方向の算出処理を説明するための図である。
【0133】
まず、方向算出部104は、受信アンテナ121aに対応する位相φaと、受信アンテナ121bに対応する位相φbとから、位相差Δφabを算出する。そして、方向算出部104は、この位相差Δφabを下記(式4)のΔφに代入することにより到来方向θを算出する。
【0134】
θ=sin−1(λΔφ/2πd) ・・・(式4)
【0135】
ここで、λは送信波の波長であり、dは受信アンテナ121aと受信アンテナ121bとの距離である。また、λΔφは、受信アンテナ121aと受信アンテナ121bとで構成される干渉計における行路差である。
【0136】
そして、方向算出部104は、位相差Δφabを用いて算出した到来方向θを方位角Aとして出力する。
【0137】
また、方向算出部104は、(式4)及び位相差Δφacを用いて算出した到来方向θを仰角Eとして出力する。
【0138】
図7Aは、方向出力114の構成を示す図である。図7Aに示すように、方向算出部104の出力である方向出力114は、ドップラー周波数Fの測定点に対する方位角A及び仰角Eの情報を含む。すなわち、方向出力114は、F(i,k)に対するA(i,k)及びE(i,k)を含んでいる。
【0139】
このとき、方向出力114の内容(集合の要素)を、L(i,k)=(A(i,k),E(i,k))と表すことにする。なお、これをL(i,k)=(A,E)と簡略に表記する。
【0140】
<マイクロドップラー演算部105>
マイクロドップラー演算部105は、複数の反射点の方向と距離とを用いて、複数の反射点の位置である測定点を算出する。
【0141】
具体的には、マイクロドップラー演算部105には、レンジ出力112、ドップラー出力113及び方向出力114が入力される。
【0142】
マイクロドップラー演算部105は、レンジ出力112に含まれる距離Rの情報{R}と、ドップラー出力113に含まれる周波数F、パワーP、及び位相φの情報{F,P,φ}と、方向出力114に含まれる方位角A及び仰角Eの情報{A,E}とを距離レンジ番号と抽出ピーク番号との指標によって相互に関連付けすることで、ドップラー周波数Fを有する測定点の距離R、パワーP、方位角A及び仰角Eを決定する。
【0143】
より具体的には、マイクロドップラー演算部105は、レンジ出力R(i)と、ドップラー出力K(i,k)=(F,P,φ)と、方向出力L(i,k)=(A,E)とを用い、指標番号1≦i≦M,1≦k≦Nでそれぞれの出力にアクセスすることで、測定点Qp(i,k)=(F,P,R,A,E)を決定する。そして、マイクロドップラー演算部105は、このQpをマイクロドップラー出力115として出力する。
【0144】
図7Bは、マイクロドップラー出力115の構成を示す図である。
【0145】
なお、マイクロドップラー演算部105は、極座標をなす測定変数(R,A,E)を、必要に応じて直交座標系の測定変数(X,Y,Z)に変換したうえで出力してもよい。この場合、測定点Qr(i,k)=(F,P,X,Y,Z)である。X,Y,Zはそれぞれレーダの正面方向に対して、左右方向(横方向、広がり)、前後方向(縦方向、奥行き)、上下方向(高さ方向)の座標値である。
【0146】
なお、受信チャネル数が2の場合、2次元の測位しかできないため、全ての仰角EをE=0とみなすことで上述の説明をそのまま適用できる。
【0147】
マイクロドップラー出力115は、第1重心算出部106a、及び重心決定部107で処理され、最終的に目標物体150の重心位置が出力される。また、目標物体の個数に対応した個数の重心位置が出力される。
【0148】
なお、マイクロドップラー演算部105は、ドップラー周波数ごとに距離レンジ方向の反射パワーを表示し直した波形を用い、レンジ分解能以下の距離を補間してもよい。こうすることで、距離決定精度を向上できる。
【0149】
重心算出部106及び重心決定部107の詳細を説明する前に、図8A、図8B、図9A及び図9Bを用いて、本発明者らが見出した知見に基づく本実施の形態の特徴を説明する。
【0150】
図8A及び図8Bは、同一レンジ内に、同一ドップラー周波数を有する2つの反射点が観測された場合の測定点を示す図である。図8A及び図8Bにおける反射点の大きさは、反射パワー(強度P)を表現している。
【0151】
図8Aは、略同一の反射パワーを有する2つの反射点161a及び161bがある場合の測定点を示す図である。ここで、略同一の反射パワーとは、略同一の散乱断面積と読み替えることができる。つまり、例えば、反射点161aと161bとは、異なる人の2つの胴体である。
【0152】
このような例では、測定点131の位置は、反射点161aと161bとの中間位置になることが実験により経験的にわかっている。
【0153】
一方、図8Bは、反射パワーの差が大きい2つの反射点162a及び162bがある場合の測定点を示す図である。例えば、反射点162aは左脚であり、反射点162bは右腕である。
【0154】
運動を時系列でみると、胴体がほぼ一方向を向いて反射パワー(散乱断面積)の変動が小さいのに対して、脚及び腕の向きなどが刻々と変化する。よって、それらの散乱断面積が変化して見える。したがって、反射パワーの差が大きい場合は、このような散乱断面積の時系列変動も加わって、測定点132の位置が予測不能になることが経験的にわかっている。
【0155】
そもそも、同一ドップラー周波数の反射波が到来する場合、定性的にどのような現象が起こるのか、簡単なモデル(数式)を用いて説明する。
【0156】
個別の反射点から受信アンテナに到来する反射波をそれぞれ(式5)で示すs1(t)、s2(2)、s3(t)、・・・とする。
【0157】
【数1】

【0158】
このとき、実際に受信アンテナで受信される電波の波形はこれらを重ね合わせた(合成した)ものとなる。このうち干渉する同一ドップラー周波数の成分だけに着目すると、周波数項が共通になるので、位相項だけに注目すればよい。この位相項は(式6)で示される。
【0159】
【数2】
【0160】
この(式6)より、合成位相Φは(式7)のようになる。
【0161】
【数3】
【0162】
到来方向DOAは、合成位相Φの受信アンテナ間の位相差ΔΦ及び定数Kを用いて、(式8)のように表される。ここで、DOAは簡単のため、受信チャネル数2の場合とする。
【0163】
【数4】
【0164】
続いて、これらの数式を用い、反射パワーの比すなわち、反射パワーの変動に対して、DOAがどのような影響を受けるかを検証した。
【0165】
図9A及び図9Bは、2つの反射点のパワーの差が到来方向推定に与える影響を計算した結果を示す図である。2つの反射点がそれぞれ+π/4、−π/4の方向にあり、K=1/π(受信アンテナ間隔が送信波長の半分の場合に相当)の場合を想定する。
【0166】
図9Aは、2つの反射点の反射パワーの比が3dB以下でランダムに変動する場合、同図9Bは、反射パワーの比が26dB以下でランダムに変動する場合を表す。それぞれ、2つの反射点のパワーの変動が3dB以内、26dB以内の結果と考えればよい。図9A及び図9Bは、そのパワー変動に対して計算されるDOA結果の分布をヒストグラムで表した図である。試行回数5000回とする。
【0167】
図9Aに示すように、2つの反射点のパワーの差が小さい場合、±π/4の中間付近の0radにおいて±0.05radの範囲内、すなわち10m離れた地点で幅1mの範囲内に測定点が集中している。
【0168】
一方、図9Bに示すように、2つの反射点のパワーの差が大きい場合、10m離れた地点で幅5mの範囲に測定点が大きく広がって分布している。
【0169】
このことから、反射点のパワー(散乱断面積)の変動が大きい運動部位では、測定点の分布が大きいことが分かる。さらに反射点の状態が刻々と変化する場合には、測定点の位置が刻々と動き回るという、不確定な状態になる。これを「不安定な測定点」と呼ぶことにする。
【0170】
逆に言えば、反射パワーが略同一となるような比較的パワーの大きい2つの反射点(人間2人の胴体同士など)があれば、パワーの大きい測定点が反射点同士の中間位置に現れることがわかる。これを「準安定な測定点」と呼ぶことにする。
【0171】
本発明は、この準安定な測定点を利用することで、ドップラー速度の干渉によって生じる偽像から、目標物体の元の反射点の位置を推定する手段を与えるものである。
【0172】
また、準安定な測定点の原理と意義を考えると、2つの等価な測定点があることが前提としてある。このことから、本実施の形態においては、偽像が発生した場合に目標物体の個数を最大2とみなすことで、簡便に物体の位置を推定し、両者の分離を実現できるという特徴がある。
【0173】
<重心算出部106>
次に、重心算出部106について、図10及び図11を用いて説明する。
【0174】
重心算出部106は、第1重心算出部106aと第2重心算出部106bとを含む。
【0175】
第1重心算出部106aは、第1間隔を有する第1分割枠を用いて、複数の反射点うち、各分割枠内に含まれる反射点の第1重心116aを算出する。第2重心算出部106bは、第1間隔より狭い第2間隔を有する第2分割枠を用いて、複数の反射点のうち、各分割枠内に含まれる反射点の第2重心116bを算出する。
【0176】
つまり、重心算出部106は、観測領域をいくつかの領域に分割し、分割された領域ごとに重心を算出する。領域を分割するための区切りを「分割枠」と表現する。また、分割枠で区切られた各々の領域を「分割領域」と表現する。
【0177】
分割枠は、算術上の概念である。例えば、観測領域内の位置を表す実数xを用いて、観測領域全体を−2a≦x≦2aで表す。この観測領域全体を4つの領域(1)−2a≦x<−a、(2)−a≦x<0、(3)0≦x<a、(4)a≦x≦2aに分けるとき、x=0、±a、±2aが分割枠を示す。
【0178】
なお、上の例は一次元の分割枠の場合であるが、2つの実数(x、y)を用いることで2次元の分割枠を形成できる。例えば、x=0,±a,±2a,・・・、y=0,±2a,±4a,・・・により分割枠を形成すれば、観測領域を、直交座標系における短辺a及び長辺2aの長方形からなる複数の分割領域に分割できる。
【0179】
本実施の形態では、直交座標系における正方形の単調な分割枠(正方分割枠)を用いる例について説明を行う。
【0180】
正方分割枠を用いる場合、その格子間隔を目標物体に適した大きさにしておくことによって、複数の目標物体をその格子を基準に分離できるという利点がある。この理由については格子間隔の設定方法のところで後述する。
【0181】
まず、分割枠のパターンの表記について説明する。
【0182】
一辺の長さaの正方分割枠の基本格子パターンを設け、それをSQ[a]と表す。ここで基本格子パターンとは例えば、分割枠の格子交差点が測定系の原点と一致するように設けた格子パターンである。そして、基本格子パターンSQ[a]をx方向にΔ1×a、かつy方向にΔ2×aだけ平行移動した格子パターンをSQ[a|Δ1,Δ2]と表す。
【0183】
例えば、SQ[a|0.5,0.5]と表した場合、基本格子パターンSQ[a]をx方向に+0.5a、y方向に+0.5aだけ平行移動した格子パターンを示す。
なお、SQ[a|0,0]=SQ[a]である。
【0184】
また、複数の分割領域の中から特定の分割領域を指し示す場合は、SQ[a|0,0](“識別子”)のように、識別番号及び識別アドレスを識別子として付加するものとする。
【0185】
例えば、分割枠SQ[a|0,0]のアドレス(1,−3)の分割領域に識別記号“S1”が付与されているのであれば、これをSQ[a|0,0](S1)又はSQ[a|0,0](1,−3)のように示す。
【0186】
本実施の形態では、異なる辺の長さ、異なる位置関係(平行移動)を組み合わせた4パターンの正方分割枠を使用する。
【0187】
すなわち、SQ[D1|0,0]、SQ[D1|0.5,0.5]、SQ[D2|0,0]、SQ[D2|0.5,0.5]の4パターンである。なお、D1≠D2である。
【0188】
ここで、上記の格子パターンで構成される分割枠を、順にそれぞれ第1分割枠A(第3分割枠)、第1分割枠B(第4分割枠)、第2分割枠A(第5分割枠)、第2分割枠B(第6分割枠)と呼ぶことにする。
【0189】
また、第1分割枠A及びBは第1重心算出部106aで用いられ、第2分割枠A及びBは第2重心算出部106bで用いられる。
【0190】
図10(a)、図10(b)、図11(a)及び図11(b)は、それぞれ、第1分割枠A、B、第2分割枠A及びBを用いた処理の一例を示す図である。
【0191】
図10(a)に示すように、第1重心算出部106aは、第1分割枠Aを用い、分割枠の区切り単位(分割領域内)の測定点の重心である第1重心A(第3重心)を算出する。次いで、図10(b)に示すように、第1重心算出部106aは、第1分割枠Bを用い、分割領域内の第1重心Aの重心である第1重心B(第1重心116a)を算出する。
【0192】
ここで、1つの分割枠だけで重心を算出すると、その分割枠の区切り位置によって結果が左右されてしまう。これに対して、互いに平行移動した2パターンの分割枠A及びBを用いることで、この区切り位置の依存性を小さくすることができる。例えば、1パターンの分割枠のみを用いた場合に、単一の目標物体が当該分割枠で分断されると、2つの重心が求まってしまう場合が考えられる。しかし、2パターンの分割枠を使用することによって、それら2つの重心が改めて1つに統合される。また、第1重心A及びBは目標物体の個数及び大きさなどに応じて、複数点算出される。
【0193】
同様に、図11(a)に示すように、第2重心算出部106bは、第2分割枠Aを用い、分割領域ごとの測定点の重心である第2重心A(第4重心)を算出する。次いで、図11(b)に示すように、第2重心算出部106bは、第2分割枠Bを用い、分割領域内の第2重心Aの重心である第2重心B(第2重心116b)を算出する。この第2重心A及びBは目標物体の個数及び大きさなどに応じて、複数点算出される。
【0194】
この重心を算出するための式を(式9)に示す。前述の通り、分割領域ごとにドップラー周波数の区別無く計算を行う。
【0195】
【数5】
【0196】
(式9)に示すように、重心算出部106は、目標物体から得られるマイクロドップラーの測定点群(集合)Qp={F,P,R,A,E}(極座標系)又はQr={F,P,X,Y,Z}(直交座標系)について、領域ごとにパワー加重平均を求める。なお、重心算出部106は、Qp及びQrどちらかに限らず、その両方についてパワー加重平均を求めてもよい。ここでパワー加重平均は、反射点のパワー又は散乱断面積の大きさを反映した平均量であるから、目標物体のマクロな運動を表す。すなわち、この算出方法は、胴体部などの散乱断面積の大きな部位を人間の移動中心とみなす操作と等価であり、実際の人間の移動軌跡と矛盾の無い結果を与える算出方法である。
【0197】
また、重心は、位置の平均のみならず、ドップラー周波数の平均値及び反射パワーの平均値も含めた呼称である。なお、ここでは、重心は、位置、速度(ドップラー周波数)及び反射パワーの平均値であるが、重心として位置の平均値のみを用いてもよいし、速度及び反射パワーの平均値の少なくとも一方と、位置の平均値とを用いてもよい。
【0198】
次に、分割枠の格子間隔(辺の長さ)の設定について説明する。
【0199】
本実施の形態では、目標物体として歩行者などの人間を想定している。人間の横幅をWhとするとき、実施の形態1では、D2=2Wh、D1=6Wh(D1/D2=3)に設定することが好ましい。例えば、人間の横幅として0.5mを採用し、Wh=0.5mの固定値を用いてもよい。
【0200】
このように設定すると、図11に示す第2重心算出処理の結果、第2重心BはD2/2すなわちWh四方の領域ごとに1点ずつ定まることになる。すなわち、目標物体として想定している人間の大きさを単位として、その重心の位置を求められることを意味する。したがって、目標物体(人間)が複数存在しても、目標物体の個数に応じた重心が算定されるという特徴を有する。
【0201】
また、図10に示す第1重心算出処理では、第2分割枠の3倍の間隔を有する第1分割枠を用いることが好ましい。図11と同様に議論すれば、第1重心BはD1/2すなわち3Wh四方の領域ごとに1点ずつ定まる。これは、例えば、2人の歩行者が人一人分離れた状態にあるとき、その重心を分離できる設定に相当する。
【0202】
つまり、第1重心算出部106aでは、前述の「準安定な測定点」を求めることを目的としている。そのため、2人の人間の重心の間に、もう1点重心を置く枠が必要となる。ドップラー速度の干渉によって偽像が発生している場合、「人一人分」の余裕が「準安定な測定点」の結果を算出するための枠として必要である。よって、D1/2=3Whと設定することが望ましいといえる。ただし、厳格にD1/D2=3である必要はなく、D1/D2>2の範囲で設定すればよい。
【0203】
なお、分割枠の間隔は固定値である必要は無く、動的に増減してもよい。具体的には、観測領域内の物体の状況に応じて分割枠の間隔を変化させることで、物体の状況を反映した重心の算出が可能になる。例えば、2人組の人間がいる場合は、間隔を広げて2人組を一括りで扱えるようにしたり、あまりにも偽像が著しい場合も間隔を広げ、算出する重心の数を敢えて減らすようにしたりすることができる。
【0204】
また、ここでは、目標物体が人間の場合を例に説明しているが、目標物体は人間以外であってもよい。この場合、上記Whは目標物体の大きさである。つまり、D2は、目標物体の幅の略2倍であり、D1は、D2の2倍以上であることが好ましい。また、略2倍とは、例えば、1.5〜2.5倍である。
【0205】
このように、重心算出部106においては、第1重心算出部106aによって、複数(特に2つ)の物体の合成重心、又は、ドップラー速度の干渉時には準安定な測定点を算出し、第2重心算出部106bによって、複数物体の個々の重心、又は、ドップラー速度干渉時の個々の重心の候補を算出する。
【0206】
以下、実際の処理について例を挙げて説明する。
【0207】
まず、図10を用いて、第1重心116aの算出処理について説明する。分割領域は図中に示されたA01、B03を用いて簡単に表記する。例えば、SQ[6Wh|0,0](A01)を単に領域A01と記し、SQ[6Wh|0.5,0.5](B03)を単に領域B03と記す。
【0208】
図10(a)に示すように、測定点は領域A03及びA04に分布しているので、第1重心算出部106aは、領域A03内での重心、及び領域A04内での重心である第1重心Aをそれぞれ計算する。このとき、これら第1重心AをG(A03)、G(A04)と表す。
【0209】
次に、図10(b)に示すように、第1重心Aは領域B01内にG(A03)及びG(A04)が存在し、それ以外には存在しない。そこで、第1重心算出部106aは、領域B01内の第1重心Bを重心G(A03)及びG(A04)を用いて算出する。第1重心算出部106aは、算出式として(式9)を用い、第1重心Aの値を測定点の値として(式9)に代入する。このように第1重心BとしてG(B01)が算出される。
【0210】
この例では、第1重心Bの結果が1つしか算出されなかったが、測定点の分布に依存して結果は当然異なる。
【0211】
また、第1重心算出部106aで使用する第1分割枠が第2重心算出部106bで使用する第2分割枠より間隔が広いため、第1重心Bをわかりやすく「広域の重心」と呼ぶ場合がある。
【0212】
続いて、図11を用い、第2重心の算出処理について説明する。
【0213】
第2重心の算出処理は、用いる格子パターンが第1重心の算出処理と異なり、それ以外は第1重心の算出処理と同じである。したがって、算出された重心結果について、第2重心Aをg(a1)、第2重心Bをg(b1)などのように記して図中に示す。g(b1)はg(a1)とg(a2)との重心であり、g(b2)はg(a3)とg(a4)との重心であり、g(b3)はg(a5)と同じである。
【0214】
また、第2重心Bは、第1重心Bの「広域の重心」と対比させて、「個体の重心」と呼ぶ場合がある。
【0215】
以上のように、第1重心算出部106aは第1重心116aとして、例えばG(B01)を出力する。第2重心算出部106bは第2重心116bとして、例えば、g(b1)、g(b2)及びg(b3)を出力する。
【0216】
<重心決定部107>
重心決定部107には、第1重心116a(広域の重心)、及び第2重心116b(個体の重心)が入力される。重心決定部107は、第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの重心を目標物体の位置として抽出する。つまり、重心決定部107は、第1重心116aと第2重心116bとを用いて、真の目標物体の個数に相当する重心を選別する機能を有する。
【0217】
図12のフローチャートを用い、重心決定方法を説明する。
【0218】
まず、重心決定部107は、全領域で第1重心116a及び第2重心116bが共に1個ずつであるか否かを判定する(S201)。
【0219】
全領域で第1重心116a及び第2重心116bが共に1個ずつである場合(S201でYes)、重心決定部107は、目標物体(人)が1体であると判定し、当該第2重心116bを目標物体の位置に決定する(S211)。
【0220】
一方、全領域で第1重心116a及び第2重心116bが複数である場合(S201でNo)、重心決定部107は、距離レンジごとに以下の処理を行う。ここで、距離レンジが異なる場合干渉は発生しないので、距離レンジ間では干渉の影響を考慮する必要はない。
【0221】
まず、重心決定部107は、距離レンジごとに第1重心116a及び第2重心116bを分離する(S202)。
【0222】
次に、重心決定部107は、第1重心116a及び第2重心116bが含まれる距離レンジのうち一つを選択する(S203)。
【0223】
次に、重心決定部107は、ステップS203で選択した距離レンジに含まれる第1重心116a及び第2重心116bが共に1個ずつであるか否かを判定する(S204)。
【0224】
距離レンジに含まれる第1重心116a及び第2重心116bが共に1個ずつである場合(S204でYes)、重心決定部107は、距離レンジ内に目標物体(人)が1体のみ含まれると判定し、当該第2重心116bを目標物体の位置に決定する(S209)。
【0225】
一方、距離レンジに含まれる第1重心116a及び第2重心116bが複数である場合(S204でNo)、重心決定部107は、第1重心を基準にして第2重心を2つのグループ(左グループ及び右グループ)に分割する(S205)。そして、重心決定部107は、第1及び第2グループから、少なくとも1点ずつ第2重心を選択し、選択した第2重心を目標物体150の位置に決定する。
【0226】
図13A及び図13Bは、ステップS205〜S208の処理を説明するための図である。
【0227】
図13Aに示す例では、選択された距離レンジに1個の第1重心G(B01)と、3個の第2重心g(b1)、g(b2)及びg(b3)とが含まれている。この場合、重心決定部107は、第1重心G(B01)を通り、かつy軸に並行な直線を基準に、第2重心g(b1)、g(b2)及びg(b3)を、当該直線より左側に位置する左グループと、当該直線より右側に位置する右グループとに分割する。この例では、左グループに第2重心g(b1)が含まれ、右グループに第2重心g(b2)及びg(b3)が含まれる。
【0228】
次に、重心決定部107は、各グループからパワーの大きい点を最大で2点ずつを選択する(S206)。ここでは、右グループに1点、左グループに2点、第2重心が含まれているので、重心決定部107は、左グループの第2重心g(b1)と、右グループの第2重心g(b2)及びg(b3)とを選択する。
【0229】
次に、重心決定部107は、ステップS206で選択した第2重心のうち、左グループから1点、かつ右グループから1点を選択し、選択したペアごとに、当該ペアに含まれる2点の重心M(ペア重心)を算出する(S207)。ここでは、図13Bに示すように、g(b1)とg(b2)との重心M12と、g(b1)とg(b3)との重心M13とが算出される。
【0230】
次に、重心決定部107は、第1重心と重心Mとの距離が最小となるペアを選択し、選択したペアに含まれる2つの第2重心を目標物体の位置に決定する(S208)。ここでは、図13Bに示すように、第1重心G(B01)に最も近い重心Mは、重心M12なので、重心決定部107は、重心M12のペアに含まれる第2重心g(b1)及びg(b2)を選択する。つまり、この場合、重心決定部107は、第2重心g(b1)と、第2重心g(b2)とに目標物体がそれぞれ存在すると判定する。
【0231】
ここで、2人の目標物体が存在する場合、マイクロドップラー出力115で示される測定点には、2人の目標物体の胴体に対応する「準安定な測定点」と、2人の目標物体の腕や脚等に対応する「不安定な測定点」とが混在する。そして、第1重心116aは、この混在する測定点の重心である。言い換えると、第1重心116aは、準安定な測定点(偽像)の重心に対応する。また、第2重心116bは、この混在する測定点のうち、準安定な測定点に対応する反射点、つまり、2人の目標物体の胴体の重心の候補である。
【0232】
そして、この例では、3つの第2重心116bが算出されている。また、上述した第1重心に最も近いペアを選択する処理は、この3つの第2重心116bから、準安定な測定点に対応する2つの反射点、つまり、2人の目標物体の重心を選択する処理に相当する。
【0233】
全ての距離レンジに対してステップS203〜S209の処理が終了していない場合(S210でNo)、ステップS203において、別の距離レンジが選択され、選択された距離レンジに対してステップS204以降の処理が行われる。また、全ての距離レンジに対してステップS203〜S209の処理が終了した場合(S210でYes)、重心決定部107は、重心決定処理を終了する。つまり、各距離レンジにおいて、ステップS208又はS209で選択された第2重心が目標物体の位置と決定される。
【0234】
なお、スペクトラム拡散方式レーダにおけるレンジ分解能は、上記のWhと同程度に設定しておくことが好ましい。例えば、レンジ分解能は、0.3m〜0.6mであることが好ましい。なお、レンジ分解能は、擬似雑音符号の符号レートbを調整することで変更することができる。
【0235】
また、距離分解能を向上するためにレンジ分解能を例えば0.1mなど細かく設定する必要のある場合は、距離を細かく設定したうえで、重心決定部107は、複数の距離レンジ(例えば3レンジ又は6レンジ)を統合し、統合した仮想レンジごとにステップS203〜S209の処理を行なってもよい。
【0236】
また、ステップS205〜S208において、第2重心116bそのものを用いるのではなく、第1重心116aを用いて第2重心116bを補正してもよい。具体的には、重心決定部107は、左グループに含まれる第2重心116bと、右グループに含まれる第2重心116bとに、第1重心116aのドップラー周波数及びパワーを等分配する。そして、重心決定部107は、その分配されたドップラー周波数と元の第2重心116bの周波数とを用い、補正後の第2重心116bの周波数を算出してもよい。こうすることで、偽像のある場合に第2重心116bから失われていた干渉によるドップラー周波数成分(すなわちドップラー速度成分)を補償できる。これにより、真に近い情報を反映できるようになる。
【0237】
なお、本実施の形態では、正方格子パターンを用いた場合について説明したが、図14A〜図15Cに示すようなさまざまな格子パターンを適用してもよい。
【0238】
図14Aは2次元の矩形格子を示し、正方格子はこの特殊な場合である。
【0239】
図14Bは1次元の矩形格子を示す。この1次元の矩形格子は、ドップラー速度の干渉による偽像が方向推定のエラーで起こることに特化して、距離方向の区切りを省略したものである。なお、スペクトラム拡散方式レーダでは、そのレンジ分解能を距離方向の区切りとして用いることができる。
【0240】
また、図14A及び図14Bに示す矩形格子は、その遠近に関わらず、横方向(x方向)の間隔が均等になるため、目標物体の距離に関わらずその実体の大きさ(幅)に対応した一意の区切りが可能である。よって、これらの矩形格子は、目標物体の大きさを利用して複数物体を分離する場合に扱いやすいという利点がある。
【0241】
一方、図14C及び図14Dはそれぞれ2次元、及び1次元の扇状格子を示している。レーダの測定系が極座標系であるため、格子が扇形であると処理の上での親和性が高い。
【0242】
図15Aは、1次元の矩形格子と距離方向の扇状格子とを組み合わせた格子パターンである。この格子は、矩形格子による物体の大きさを反映した物体分離と、扇状格子による測定系(偽像発生のメカニズム)の親和性とを加味した構成である。
【0243】
また、図15B及び図15Cに示すように、精度を高めたい距離又は方向に対して区切り幅を狭めたような格子間隔を設定してもよい。
【0244】
(変形例1)
また、第1重心116aに応じて、第2分割枠を決定してもよい。例えば、図16Aに示すように、距離レンジごとに第1重心116aを1点決定し、第2分割枠Aの交点座標を第1重心116aと一致させるように設定する。このようにすることで、第1重心116aに対する左右の位置関係を意識して動的に第2重心116bの算出及び重心の決定を行える。
【0245】
さらに、図16Bに示すように、図14Bに示す1次元の矩形格子と、スペクトラム拡散方式で定まる距離レンジとを組み合わせるとともに、距離レンジごとに矩形格子の区切り位置を、当該区切り位置が第1重心と一致するように左右にシフトさせてもよい。
【0246】
(変形例2)
第2重心算出部106bにおいて第2重心116bを算出する際、分割領域内の測定点の個数、すなわち、重心に寄与した測定点数を記録するようにしておいてもよい。そして、重心決定処理(図12)において、第2重心116bの中から重心に寄与した測定点数が最大の分割領域に含まれる重心、又はその重心に最近接の重心を選択するようにしてもよい。
【0247】
このようにすることで、測定点群の集中と広がりとを考慮した重心、すなわち、物体形状における幾何的中心を反映した重心を選択できる。
【0248】
また、図12のフローに示す物理的中心として選択した重心と、変形例2のような幾何的な中心として選択した重心とを両方算出し、両者が一致するかどうかを吟味することで、選択された重心の確からしさを判断することもできる。
【0249】
以上のように、本実施の形態に係るレーダシステム100は、重心決定部107の出力である重心出力117と、イメージング結果であるマイクロドップラー出力115による取得イメージとを表示画面上に表示することができる。これによって、目標物体の形状イメージとその目標物体の位置とを同時に、又は必要に応じてどちらか一方をモニタすることができる。
【0250】
これにより、レーダシステム100は、目標物体の形状イメージが不鮮明であっても、少なくとも物体の個数、位置、及び速度などのマクロな情報に関しては、分離して表示することができる。これは、形状を解釈する際の重要な情報となる。
【0251】
以上、本発明の実施の形態1に係るレーダシステム100は、ドップラー速度の干渉により偽像が発生する状況であっても、アンテナ数を増やすことなく、複数物体個々についてマクロな情報を推定できる。このように、レーダシステム100は、物体の位置の検出精度を向上できる。
【0252】
(実施の形態2)
図17は、実施の形態2に係るレーダシステム200の構成を示すブロック図である。図17に示すレーダシステム200は、実施の形態1で説明したレーダシステム100の構成に加え、追尾予測部208を備える。また、重心決定部207が、追尾予測部208の出力である予測出力218を用いる点が異なる。また、実施の形態2に係るレーダシステム200は、実施の形態1のように目標物体の数が3以上の場合にも適用できる。
【0253】
なお、実施の形態1と共通部分に関しては実施の形態1と同じ符号を付して説明を省略する。
【0254】
<追尾予測部208>
追尾予測部208は、重心決定部207から出力された重心出力217が入力される。重心決定部207の説明は後述するが、出力される重心出力217は実施の形態1と同様である。
【0255】
追尾予測部208は、重心決定部207により決定された、過去の目標物体の位置を用いて、未来の目標物体の位置である予測位置を予測する。具体的には、追尾予測部208は、測定データとして重心出力217を時系列で逐次取得する。また、追尾予測部208は、次のステップ(未来)の重心位置を推定(予測という)することのできる予測フィルタを含んでいる。そのような予測フィルタにはカルマンフィルタがある。このような予測フィルタによる、過去から現在に至る推定値は、測定結果が都度反映され、修正しながら漸化的に定まるため、目標物体の追尾(トラッキング)に利用されている。
【0256】
さらに、追尾予測部208では、レーダシステム100により検知される目標物体の個数を予測する。具体的には、予測フィルタによって、検知外領域(検知性能又は物理的遮蔽によってシステムで検知できない領域)への目標物体の出入りがあるか(すなわち物体数の増減があるか)、又は、複数物体の同一距離レンジへの進入があるか(すなわち偽像の発生があるか)を予測できる。そこで、追尾予測部208は、個数変動の予測を使って物体個数を修正し、目標物体の個数を予め決定する。
【0257】
具体的には、追尾予測部208は、過去において物体の個数が2であり、予測フィルタによって、現在又は次ステップで偽像が生じていると判明すれば、個数の判定は2にする。これにより、偽像の影響で重心の候補(第2重心116b)が3つ以上出力されたとしても、そのうち2つを選択すればよいことが明確となる。
【0258】
このように、予測出力218は、目標物体の個数Nと、それぞれの予測値(Xpi,Ypi,Zpi)又は(Rpi,Api,Epi)の情報(ただし、i=1,2,・・・N)と、偽像判定情報FIとを含む。例えば、N=2のとき、(Xp1,Yp1,Zp1)、及び(Xp2,Yp2,Zp2)の2組のデータが出力される。
【0259】
また、偽像判定情報FIとは、(Xp1,Yp1,Zp1)、及び(Xp2,Yp2,Zp2)のレンジ番号をそれぞれRp1、Rp2とすると、例えば、Rp1=Rp2のとき、FI=1(偽像確定)であり、Rp1≠Rp2のとき、FI=0(偽像なし)である。
【0260】
または、さらに多段階に判定し、|Rp1−Rp2|=0のとき、FI=2(偽像確定)であり、|Rp1−Rp2|=1のとき、FI=1(偽像予備段階)であり、それ以外のとき、FI=0(偽像なし)であってもよい。
【0261】
なお、予測出力218は距離レンジごとに区切って処理されることが好ましい。そうすることにより、問題となる距離レンジを区別して扱えるため、偽像の有無に応じた適切な重心決定を行うことができるようになる。
【0262】
<重心決定部207>
重心決定部207には、第1重心116a、第2重心116b及び予測出力218が入力される。重心決定部207は、実施の形態1の場合とは異なり、予測出力218で示される目標物体の個数及び位置に基づいて重心を決定する。具体的には、重心決定部207は、複数の第2重心116bのうち、追尾予測部208で予測された数の第2重心116bを目標物体の位置に決定する。
【0263】
図18は、重心決定処理のフローチャートである。また、図19及び図20は、重心決定部207における重心の選択方法を説明するための図である。
【0264】
以下では、同一距離レンジの情報のみ取り出し、当該情報が1次元の空間に丸められているものとして説明する。横軸はA値(方位角)又はX値(X位置)とする。
【0265】
まず、予測出力218で示される物体個数はN=2であるとする。予測出力218で示される予測位置と第1重心116aとの位置関係に応じて、重心の選択方法が異なっている。
【0266】
まず、重心決定部207は、予測出力218において、偽像の発生が示されているか否かを判定する(S301)。具体的には、重心決定部207は、上記のF=1又は2の場合、偽像の発生があると判定し(S301でYes)、F=0の場合、偽像の発生がないと判定する(S301でNo)。
【0267】
偽像の発生がある場合(S301でYes)、重心決定部207は、2つの予測位置の間に第1重心116aが存在するか否かを判定する(S302)。言い換えると、重心決定部207は、第1重心116aの左右の両方に予測重心が存在するか否かを判定する。
【0268】
図19に示すように、2つの予測位置の間に第1重心116a(第1重心B)が存在する場合(S302でYes)、重心決定部207は、第2重心116bの中から各予測位置に最も近い点を選択する(S303)。具体的には、予測出力218で示される予測位置がN点の場合、重心決定部207は、複数の第2重心116bのうちのN点の各々と、N点の予測位置の各々との距離(又は距離の2乗)の和を算出する。そして、重心決定部207は、算出した和が最小となる組合せに含まれる第2重心116bを選択する。
【0269】
図19の例では、重心決定部207は、以下の6通りの距離dを計算し、最小距離の組合せを選択する。
【0270】
d12=(Xg1−Xp1)2+(Xg2−Xp2)2
d13=(Xg1−Xp1)2+(Xg3−Xp2)2
d21=(Xg2−Xp1)2+(Xg1−Xp2)2
d23=(Xg2−Xp1)2+(Xg3−Xp2)2
d31=(Xg3−Xp1)2+(Xg1−Xp2)2
d32=(Xg3−Xp1)2+(Xg2−Xp2)2
【0271】
例えば、d12が最小距離であれば、重心決定部207は、重心出力217として第2重心Xg1及びXg2を選択する。
【0272】
また、追尾予測部208では、追尾を実行するために、目標物体にラベリングして(識別番号を付けて)管理している。例えば、物体1に対する予測位置がXp1であり、物体2に対する予測位置がXp2である。したがって、重心出力217において、重心Xg1は物体1に対応付けられており、重心Xg2は物体2に対応付けられている。
【0273】
なお、ここでは位置の次元を1次元に落として説明したが、2次元及び3次元での評価が必要であれば、容易に拡張できる。
【0274】
また、位置の情報のみならず、ドップラー周波数F(Fg,Fp)も含めた最小距離を吟味することにより、動きの類似度を含めた評価が可能になるため、より好ましい。
【0275】
例えば、i,jを指標、wを重み付け(物理次元の統一を含む)としたとき、下記(式10)を用いて距離dを算出すればよい。
【0276】
d=Σi,j{(Xgi−Xpj)2+w×(Fgi−Fpj)2} ・・・(式10)
【0277】
図20は、予測位置の間に第1重心116aがない場合を示す図である。2つの予測位置の間に第1重心116aが存在しない場合(S302でNo)、重心決定部207は、予測出力218を判定に用いず、図12に示す実施の形態1の決定フローにより重心を選択する(S304)。
【0278】
また、予測出力218において偽像の発生がないことが示される場合(S301でNo)、図21に示すように第2重心算出部106bで算出された複数の第2重心Bをそのまま目標物体の位置として選択する(S305)。また、この場合、第1重心算出部106aは、第1重心116aを算出しなくてもよい。
【0279】
なお、ここでは、物体が2個の場合を説明したが、予測出力218により3個以上の物体が予測されている場合にも同様の処理を行うことができる。
【0280】
(実施の形態2の変形例1)
また、重心決定部207は、上述した処理の代わりに、以下に示す処理を行なってもよい。
【0281】
図22は、実施の形態2の変形例1に係る重心決定処理のフローチャートである。また、予測出力218において、物体個数が3以上(N≧3)のときの概略をN=3を例に図23に示す。N≧3のとき、重心決定部207では、次のフローにより重心を決定する。また、距離レンジごとに以下の処理が行われる。
【0282】
まず、重心決定部207は、第1重心116aを基準として、第2重心を左右のグループ(第1グループ及び第2グループ)に分割する(S321)。
【0283】
また、重心決定部207は、第1重心116aを基準として、予測候補を左右のグループ(第3グループ及び第4グループ)に分割する(S322)。
【0284】
次に、重心決定部207は、左右の両方のグループに予測位置が含まれているか否かを判定する(S323)。
【0285】
予測位置が左右の両方のグループに含まれている場合(S323でYes)、重心決定部207は、グループごとに各予測位置に最も近い第2重心の組み合わせを、目標物体の位置として選択する(S324)。つまり、重心決定部207は、左グループに含まれる複数の第2重心のうち、左グループに含まれる各予測位置に最も近い第2重心と、右グループに含まれる複数の第2重心のうち、右グループに含まれる各予測位置に最も近い第2重心と、を目標物体の位置に決定する。具体的には、左グループに含まれる予測位置がN点の場合、重心決定部207は、左グループに含まれる複数の第2重心116bのうちのN点の各々と、N点の予測位置の各々との距離(又は距離の2乗)の和を算出する。そして、重心決定部207は、算出した和が最小となる組合せで重心を選択する。なお、右グループに対する処理も同様である。
【0286】
図23に示す例では、第2重心Xg1、Xg2及びXg3が左グループに含まれ、第2重心Xg4及びXg5が右グループに含まれる。また、予測位置Xp1及びXp2が左グループに含まれ、予測位置Xp3が右グループに含まれる。よって、重心決定部207は、左グループに含まれる3つの第2重心と2つの予測位置との組み合わせである6パターンについて、各第2重心と各予測位置との距離(又は距離の2乗)の和を算出する。ここでは、6つ組み合わせのうち、Xg1とXp1とのペアと、Xg2とXp1とのペアとを含む組み合わせの上記和が最も小さくなる。よって、重心決定部207は、予測位置Xp1に対応する第2重心としてXp1を選択し、予測位置Xp2に対応する第2重心としてXp2を選択する。
【0287】
また、重心決定部207は、右グループに含まれる予測位置Xp3に対応する第2重心として、右グループに含まれる第2重心Xg4及びXg5のうち、当該予測位置Xp3に最も近い第2重心Xg4を選択する。
【0288】
一方、予測位置が左右のグループの一方にのみに含まれている場合(S323でYes)、重心決定部207は、予測位置が含まれないグループから1点、予測位置が含まれるグループからN−1点の第2重心を選択する(S325)。例えば、予測位置が左グループのみに含まれている場合、重心決定部207は、左グループに含まれるN個の予測位置のうち、N−1を選択する。例えば、重心決定部207は、左グループに含まれるN点の予測位置のうち、第1重心Bに最も近い予測位置を除くN−1点の予測位置を選択する。そして、重心決定部207は、選択したN−1点の予測位置に対して、距離の和が最小となるN−1点の第2重心を選択する。また、重心決定部207は、右グループに含まれる第2重心のうち、第1重心116aに最も近い第2重心を選択する。
【0289】
このように、第1重心116aを基準にすることで、予測位置と第2重心116bとのペアリングの組合せ数を減らすこととができる。さらに、ドップラー速度の干渉によって偽像が発生しても、可能な限り有効なデータを抽出できるようになる。このように、当該レーダシステム200は、より安定な追尾を実現できる。
【0290】
以上、本発明の実施の形態2に係るレーダシステム200は、ドップラー速度の干渉による偽像がある状況であっても、アンテナ数を増やすことなく、測定点の中から目標物体個々のマクロな情報を推定及び分離できる。これにより、レーダシステム200は、安定なトラッキングを実現できる。
【0291】
以上、本発明の実施の形態に係るレーダシステムについて説明したが、本発明は、この実施の形態に限定されるものではない。
【0292】
また、上記実施の形態に係るレーダシステムに含まれる処理部の一部又は全ては集積回路であるLSIとして実現してもよい。これらは個別に1チップ化されてもよいし、一部又は全てを含むように1チップ化されてもよい。
【0293】
また、集積回路化はLSIに限るものではなく、専用回路又は汎用プロセッサで実現してもよい。LSI製造後にプログラムすることが可能なFPGA(Field Programmable Gate Array)、又はLSI内部の回路セルの接続や設定を再構成可能なリコンフィギュラブル・プロセッサを利用してもよい。
【0294】
また、本発明の実施の形態に係る、レーダシステムの機能の一部又は全てを、CPU等のプロセッサがプログラムを実行することにより実現してもよい。
【0295】
さらに、本発明は上記プログラムであってもよいし、上記プログラムが記録された非一時的なコンピュータ読み取り可能な記録媒体であってもよい。また、上記プログラムは、インターネット等の伝送媒体を介して流通させることができるのは言うまでもない。
【0296】
また、上記実施の形態1〜2に係る、レーダシステム、及びそれらの変形例の機能のうち少なくとも一部を組み合わせてもよい。
【0297】
また、上記で用いた数字は、全て本発明を具体的に説明するために例示するものであり、本発明は例示された数字に制限されない。
【0298】
また、ブロック図における機能ブロックの分割は一例であり、複数の機能ブロックを一つの機能ブロックとして実現したり、一つの機能ブロックを複数に分割したり、一部の機能を他の機能ブロックに移してもよい。また、類似する機能を有する複数の機能ブロックの機能を単一のハードウェア又はソフトウェアが並列又は時分割に処理してもよい。
【0299】
また、上記のステップが実行される順序は、本発明を具体的に説明するために例示するためのものであり、上記以外の順序であってもよい。また、上記ステップの一部が、他のステップと同時(並列)に実行されてもよい。
【0300】
更に、本発明の主旨を逸脱しない限り、本実施の形態に対して当業者が思いつく範囲内の変更を施した各種変形例も本発明に含まれる。
【産業上の利用可能性】
【0301】
本発明は、ドップラーレーダシステムに適用できる。また、本発明は、このようなドップラーレーダシステムを用いる防犯システム又は衝突回避システムに有用である。
【符号の説明】
【0302】
100、200 レーダシステム
101a 送信部
101b 受信部
102 距離算出部
103 ドップラー解析部
104 方向算出部
105 マイクロドップラー演算部
106 重心算出部
106a 第1重心算出部
106b 第2重心算出部
107、207 重心決定部
120 送信アンテナ
121、121a、121b、121c 受信アンテナ
111 受信信号
112 レンジ出力
113 ドップラー出力
114 方向出力
115 マイクロドップラー出力
116a 第1重心
116b 第2重心
117、217 重心出力
131、132 測定点
150、150a、150b 目標物体
161a、161b、162a、162b 反射点
208 追尾予測部
218 予測出力
901 レーダ装置
910 送信器
911 送信アンテナ
912、913 受信アンテナ
920、930 受信器
931、932、933 被測定物
【技術分野】
【0001】
本発明は、目標物体の位置を検知するドップラーレーダシステム、及び物体検知方法に関する。
【背景技術】
【0002】
近年、安全及び快適に暮らせる住環境、並びに社会インフラの整備が重視されるようになってきている。これに伴い、日常生活において、例えば高齢者の行動或いは動作を補助する支援機器、又は人間の負担を軽減するために働く自律型ロボットの実現が望まれるようになっている。
【0003】
実際の生活環境においては、人間又はその他多数の障害物が存在している。その中を移動機器又はロボットが走り回るためには、当該移動機器又はロボットと障害物との衝突を回避することが望まれる。つまり、それら移動機器又はロボットが効率的に障害物との衝突を避けたり、障害物の接近を警告したり、停止したりしながら、安全を確保することが強く望まれる。
【0004】
その一方で、そのような移動機器が走行する際に障害となる障害物のうち、運動又は行動を予測するのが困難なものは人間である。また、対人衝突は歩行者及び搭乗者の双方に与える影響が大きいという問題がある。
【0005】
このようなロボットは、見通しのよい空間よりも、火災で煙の立ちこめた環境、夜間の街灯のない暗闇、又は壁を隔てた空間など、通常とは異なる条件で活用されるので、このような条件でセンシングすることが求められている。すなわち、いかに劣悪な環境でも、人間をうまく検知し、その行動及び移動軌跡を予測できることが必要である。
【0006】
そのような環境にも適用できるセンシング手段としては、電波センサ(レーダ)がある。レーダは相対速度と相対距離とを同時かつ瞬時に計測可能であることから、特に自動車用のセンシングシステムとして既に実用化されている。
【0007】
レーダ(電波)を用いて歩行者など人間の形状及び運動を測定する試みとして、ドップラー(Doppler)シフトによる速度検知と、干渉計法による到来方向検知(DOA:Direction−of−Arrival)とを組み合わせたDDOA(Doppler and Direction−of−Arrival)法と呼ばれる方法が知られている(例えば、非特許文献1参照)。
【0008】
図24は、DDOA法を用いたレーダ装置の構成を示す図である。
【0009】
図24に示すレーダ装置901は、送信器910と、受信器920及び930と、送信アンテナ911と、受信アンテナ912及び913とを備える。
【0010】
レーダ装置901の検知対象は、被測定物931、932及び933である。送信器910は、ある周波数の探知電波を出射する。受信器920及び930は、当該探知電波が被測定物931〜933で反射された反射波を受信する。
【0011】
レーダ装置901に対して、被測定物931〜933がある視線方向速度で動いている場合、受信器920及び930で受信した反射波の周波数は、送信アンテナ911から放射された探知電波の周波数に対して、視線方向速度に対応する周波数だけシフトする。そのシフトした周波数(ドップラー周波数)から、被測定物931〜933のそれぞれの視線方向速度を検出できる。
【0012】
ここで、「視線方向速度」とは、被測定物931〜933が持つ速度のうち、レーダ装置901から被測定物への方向に沿った速度成分のことである。つまり、視線方向速度は、レーダ装置901に対する、被測定物931〜933の相対的な速度成分である。具体的には、図24に示すように、被測定物931〜933の速度をそれぞれV1、V2及びViとすると、被測定物931〜933の視線方向速度は、当速度V1、V2及びViをレーダ装置901から被測定物931〜933への方向に沿って分解した速度であるV1f、V2f及びVifである。
【0013】
つまり、レーダ装置901は、探知電波の周波数に対する、受信器920及び930で受信した反射波の周波数を用いて、被測定物931〜933の視線方向速度V1f、V2f及びVifを検出する。
【0014】
ところで、レーダ装置901は、図24に示すように、受信アンテナ及びその受信アンテナに対応する受信器を含む受信系統を2系統備えている。さらに、それぞれの受信アンテナ912及び913は、異なる場所に配置されている。
【0015】
これにより、各被測定物931〜933から受信アンテナ912までの距離と、当該被測定物931〜933から受信アンテナ913までの距離とは、互いに異なる。
【0016】
このように被測定物931〜933から2つの受信アンテナ912及び913までの距離が異なることで、被測定物931〜933の方向検出が可能になる。以下、この方向検出の原理について具体的に説明する。
【0017】
図24において、例えば、被測定物933は、受信アンテナ912より受信アンテナ913に近い位置に存在するので、被測定物933からの反射波は受信アンテナ912より受信アンテナ913に早く到着する。よって、受信アンテナ912で受信した反射波と受信アンテナ913で受信した反射波とを比較した場合、受信アンテナ912で受信した反射波は受信アンテナ913で受信した反射波より位相が遅れることになる。ここで、被測定物933が受信アンテナ912及び受信アンテナ913の正面からθiの方向にあり、2つの受信アンテナ912及び913が距離dだけ離れて配置されているとする。この場合、受信アンテナ912で受信した反射波と受信アンテナ913で受信した反射波との位相差は(式1)で表される。なお、φ1は受信アンテナ912で受信した反射波の位相であり、φ2は受信アンテナ913で受信した反射波の位相であり、λは送信アンテナ911から出射された探知電波の波長である。
【0018】
φ2−φ1=2πd×sinθ/λ ・・・(式1)
【0019】
この(式1)を変形すると、下記の(式2)となる。つまり、2つの受信アンテナ912及び913で受信した2つの反射波の位相差φ2−φ1から被測定物933の方向θを検出できる。
【0020】
θ=sin−1{(φ2−φ1)λ/(2πd)} ・・・(式2)
【0021】
これが干渉計法を用いたDOAの推定である。
【0022】
さらに、DDOAでは、各被測定物のドップラー周波数を検知する。そして、受信アンテナが受信した反射波のうち、各被測定物に対応するドップラー周波数の信号に対して、上記のDOAを行うことで、対応する被測定物の方向を検知できる。このように、従来のレーダ装置901は、複数の被測定物の識別したうえで、各被測定物の方向を検知することができる。
【0023】
なお、図24では、レーダ装置901は、2つの受信アンテナ912及び913を有するので1次元方向しか検知できないが、例えば受信アンテナ912と受信アンテナ913とを含む直線上以外に、もう一つの受信アンテナを配置することで、水平/垂直の2次元方向を検知することができる。
【0024】
このようなDDOAを、人体検知に用いた場合を考える。ここで、人間の腕、脚、胴体、及び頭部など、体を構成する部位は、それぞれ異なる速度で動く。よって、それぞれの運動を反映したドップラーシフトがスペクトルの微細な構造(マイクロドップラー)として観測可能である。これにより、その微細構造を分析及び解析することによって、人間の検出に加え、人間の動作同定を行うことができる。さらに、DDOAにより、人間とそれ以外の物体とを区別することもできる。このように、DDOAによるイメージングは、3つという数少ない受信アンテナのみを用いて3次元のイメージングが可能であるという利点がある。
【0025】
ところが、DDOAは、観測可能な全範囲を対象として、物体からの反射波に対するドップラーシフトの解析及び到来方向の推定を行うため、さまざまな干渉を受けやすい。そして、この干渉が、特に、到来方向の推定結果に与える影響が大きいという問題がある。
【0026】
具体的には、DDOAでは、ドップラー信号処理(周波数解析)を行ってドップラー周波数を解析した後、それぞれのドップラー周波数に対し、複数の受信アンテナ間の信号位相差を使って到来方向を推定する必要がある。したがって、観測範囲の中に同一のドップラー速度(すなわち、ドップラー周波数が同一となるときの速度)の物体が存在すると、反射波が相互に干渉した信号を受信することになる。よって、その受信信号からはそれぞれの物体の位相情報を独立して取り出せない。結果として到来方向の推定を正しく行えない。
【0027】
このような到来方向推定の誤りを軽減する技術として、受信アンテナをアレー化し、アレー信号処理を行う方法がある(例えば、非特許文献2参照。)。
【0028】
通常、2素子の受信アンテナを用いて観測領域内の2人の人間を測定すると、両者が同一の運動した場合に必ず偽像が発生する。そこで、このシステムでは、図25に示すようにCW(Continuous Wave)方式レーダをベースに4素子の1次元アンテナアレーを有するレーダ装置を構成する。さらに、当該レーダ装置は、CLEANアルゴリズム又はRELAXアルゴリズムを適用することで、2次元平面内で2人の歩行者を分離することができる。
【先行技術文献】
【非特許文献】
【0029】
【非特許文献1】A. Lin and H. Ling, ”Frontal imaging of human using three element Doppler and direction−of−arrival radar,” Electronics Letters, vol.42, no.11, pp.660-661, (2006).
【非特許文献2】Shobha Sundar Ram and Hao Ling, ”Through−Wall Tracking of Human Movers Using Joint Doppler and Array Processing”, IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 5, NO. 3, JULY 2008
【発明の概要】
【発明が解決しようとする課題】
【0030】
しかしながら、非特許文献2記載の従来のレーダ装置では、観測領域に存在する物体の個数が増加すると、それに応じて受信アンテナ素子の数を増加させる必要があるという課題がある。その結果、例えば、使用する電波の波長を1cm、アンテナ素子の間隔を半波長の0.5cmとしたとき、3素子を直角二等辺三角形に配置した構成の干渉計の最小サイズは概ね0.5cm四方に収まるが、横方向の素子数を10にした場合、最小サイズは0.5cm×4.5cmになる。
【0031】
そこで、本発明は、上記従来の課題を鑑み、受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上できるドップラーレーダシステムを提供することを目的とする。
【課題を解決するための手段】
【0032】
上記目的を達成するために、本発明の一形態に係るドップラーレーダシステムは、目標物体の位置を検知するドップラーレーダシステムであって、送信信号を生成する送信部と、前記送信信号を送信波として放射する送信アンテナと、前記送信波が、前記目標物体に含まれる複数の反射点で反射された反射波を各々が受信する複数の受信アンテナと、前記複数の受信アンテナで受信された複数の反射波の各々に対応する複数の受信信号を生成する受信部と、前記複数の受信信号間の位相差を用いて、前記ドップラーレーダシステムに対する前記複数の反射点の各々の方向を算出する方向算出部と、前記送信信号と前記受信信号との遅延量を用いて、前記ドップラーレーダシステムと前記複数の反射点との各々の距離を算出する距離算出部と、前記複数の反射点の各々の方向と距離とを用いて、前記複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部と、第1間隔を有する第1分割枠を用いて、前記複数の測定点うち、前記第1分割枠で分割された各第1分割領域に含まれる測定点の第1重心を算出する第1重心算出部と、前記第1間隔より狭い第2間隔を有する第2分割枠を用いて、前記複数の測定点のうち、前記第2分割枠で分割された各第2分割領域に含まれる測定点の第2重心を算出する第2重心算出部と、複数の前記第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定する重心決定部とを備える。
【0033】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上できる。
【0034】
また、前記第2間隔は、前記目標物体の幅の略2倍であり、前記第1間隔は、前記第2間隔の2倍以上であってもよい。
【0035】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、目標物体の個数に応じた第2重心を算出できる。
【0036】
また、前記第1分割枠は、第3分割枠と、前記第3分割枠と異なる第4分割枠とを含み、前記第2分割枠は、第5分割枠と、前記第5分割枠と異なる第6分割枠とを含み、前記第1重心算出部は、前記複数の測定点のうち、前記第3分割枠で分割された各第3分割領域に含まれる測定点の第3重心を算出し、複数の前記第3重心のうち、前記第4分割枠で分割された各第4分割領域に含まれる第3重心の重心を前記第1重心として算出し、前記第2重心算出部は、前記複数の測定点のうち、前記第5分割枠で分割された各第5分割領域に含まれる測定点の第5重心を算出し、複数の前記第5重心のうち、前記第6分割枠で分割された各第6分割領域に含まれる第5重心の重心を前記第2重心として算出してもよい。
【0037】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、分割枠の区切り位置の依存性を小さくできる。
【0038】
また、前記重心決定部は、前記第1重心の位置を基準に、前記複数の第2重心を第1グループと第2グループとに分割し、前記第1及び第2グループから、少なくとも1点ずつ第2重心を選択し、選択した前記第2重心を前記目標物体の位置に決定してもよい。
【0039】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、偽像が発生している場合の、物体の位置の検出精度を向上できる。
【0040】
また、前記重心決定部は、前記第1グループに含まれる第2重心と前記第2グループに含まれる第2重心とで構成されるペアごとに、当該ペアに含まれる2点の第2重心の重心であるペア重心を算出し、算出した複数のペア重心のうち、前記第1重心に最も近い前記ペア重心のペアを選択し、選択したペアに含まれる2点の第2重心を2つの前記目標物体の位置に決定してもよい。
【0041】
また、前記ドップラーレーダシステムは、さらに、前記重心決定部により決定された、過去の前記目標物体の位置を用いて、未来の前記目標物体の位置である予測位置を予測する追尾予測部を備え、前記追尾予測部は、前記ドップラーレーダシステムにより検知される目標物体の数を予測し、前記重心決定部は、前記複数の第2重心のうち、前記追尾予測部で予測された数の第2重心を前記目標物体の位置に決定してもよい。
【0042】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、追尾予測の結果を用いることで、物体の位置の検出精度を向上できる。
【0043】
また、前記重心決定部は、前記追尾予測部により予測された複数の前記予測位置の間に前記第1重心が存在する場合、前記複数の第2重心のうち、各前記予測位置に最も近い第2重心を前記目標物体の位置に決定し、前記追尾予測部により予測された複数の前記予測位置の間に前記第1重心が存在しない場合、前記複数の第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定してもよい。
【0044】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、追尾予測の結果に応じて、適切な処理を行える。
【0045】
また、前記重心決定部は、前記第1重心の位置を基準に、前記複数の第2重心を第1グループと第2グループとに分割し、前記第1重心の位置を基準に、複数の前記予測位置を第3グループと第4グループとに分割し、前記第1グループに含まれる複数の第2重心のうち、前記第3グループに含まれる各予測位置に最も近い第2重心と、前記第2グループに含まれる複数の第2重心のうち、前記第4グループに含まれる各予測位置に最も近い第2重心と、を前記目標物体の位置に決定してもよい。
【0046】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、目標物体の個数が3以上の場合でも、物体の位置の検出精度を向上できる。
【0047】
また、前記重心決定部は、前記第3グループ及び前記第4グループの両方に予測位置が含まれる場合、前記第1グループに含まれる複数の第2重心のうち、前記第3グループに含まれる各予測位置に最も近い第2重心と、前記第2グループに含まれる複数の第2重心のうち、前記第4グループに含まれる各予測位置に最も近い第2重心と、を前記目標物体の位置に決定し、前記第3グループにN(Nは3以上の整数)点の予測位置が含まれ、かつ前記第4グループに予測位置が含まれない場合、前記第1グループに含まれるN−1点の第2重心と、前記第2グループに含まれる1点の第2重心と、を前記目物体の位置に決定してもよい。
【0048】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、目標物体の個数が3以上の場合でも、物体の位置の検出精度を向上できる。
【0049】
また、前記重心決定部は、同一の距離レンジに複数の予測位置が含まれる場合、前記複数の第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定し、同一の距離レンジに一つの予測位置のみが含まれる場合、前記第2重心を前記目標物体の位置に決定してもよい。
【0050】
この構成によれば、本発明の一形態に係るドップラーレーダシステムは、偽像が発生するか否かに応じて、適切な処理を行える。
【0051】
なお、本発明は、このようなドップラーレーダシステムとして実現できるだけでなく、ドップラーレーダシステムに含まれる特徴的な手段をステップとする物体検知方法として実現したり、そのような特徴的なステップをコンピュータに実行させるプログラムとして実現したりすることもできる。そして、そのようなプログラムは、CD−ROM等の非一時的なコンピュータ読み取り可能な記録媒体、及びインターネット等の伝送媒体を介して流通させることができるのは言うまでもない。
【0052】
さらに、本発明は、このようなドップラーレーダシステムの機能の一部又は全てを実現する半導体集積回路(LSI)として実現できる。
【発明の効果】
【0053】
本発明は、受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上できるドップラーレーダシステムを提供できる。
【図面の簡単な説明】
【0054】
【図1】本発明の実施の形態の利用シーンを示す図である。
【図2A】本発明の実施の形態に係る、干渉がない場合の測定点を示す図である。
【図2B】本発明の実施の形態に係る、干渉がある場合の測定点を示す図である。
【図3】本発明の実施の形態1に係るレーダシステムのブロック図である。
【図4】本発明の実施の形態1に係る目標物体検知処理のフローチャートである。
【図5A】本発明の実施の形態1に係るレンジ出力の構成を示す図である。
【図5B】本発明の実施の形態1に係る、蓄積されているレンジ出力を示す図である。
【図5C】本発明の実施の形態1に係るドップラー出力の構成を示す図である。
【図6】本発明の実施の形態1に係る到来方向の算出処理を説明するための図である。
【図7A】本発明の実施の形態1に係る方向出力の構成を示す図である。
【図7B】本発明の実施の形態1に係るマイクロドップラー出力の構成を示す図である。
【図8A】本発明の実施の形態1に係る、反射パワー比が小さい場合における測定点を示す図である。
【図8B】本発明の実施の形態1に係る、反射パワー比が大きい場合における測定点を示す図である。
【図9A】本発明の実施の形態1に係る、反射パワー比が小さい場合におけるDOA結果の分布を示す図である。
【図9B】本発明の実施の形態1に係る、反射パワー比が大きい場合におけるDOA結果の分布を示す図である。
【図10】本発明の実施の形態1に係る第1重心算出処理を説明するための図である。
【図11】本発明の実施の形態1に係る第2重心算出処理を説明するための図である。
【図12】本発明の実施の形態1に係る重心決定処理のフローチャートである。
【図13A】本発明の実施の形態1に係る重心決定処理を説明するための図である。
【図13B】本発明の実施の形態1に係る重心決定処理を説明するための図である。
【図14A】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図14B】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図14C】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図14D】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図15A】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図15B】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図15C】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図16A】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図16B】本発明の実施の形態1に係る分割枠の形状例を示す図である。
【図17】本発明の実施の形態2に係るレーダシステムのブロック図である。
【図18】本発明の実施の形態2に係る重心決定処理のフローチャートである。
【図19】本発明の実施の形態2に係る重心決定処理を説明するための図である。
【図20】本発明の実施の形態2に係る重心決定処理を説明するための図である。
【図21】本発明の実施の形態2に係る重心算出処理を説明するための図である。
【図22】本発明の実施の形態2の変形例に係る重心決定処理のフローチャートである。
【図23】本発明の実施の形態2の変形例に係る重心決定処理を説明するための図である。
【図24】従来のレーダ装置のブロック図である。
【図25】従来のレーダシステムのブロック図である。
【発明を実施するための形態】
【0055】
以下、本発明の実施の形態について、図面を用いて詳細に説明する。なお、以下で説明する実施の形態は、いずれも本発明の好ましい一具体例を示すものである。以下の実施の形態で示される数値、形状、材料、構成要素、構成要素の配置位置及び接続形態、ステップ、ステップの順序などは、一例であり、本発明を限定する主旨ではない。本発明は、請求の範囲だけによって限定される。よって、以下の実施の形態における構成要素のうち、本発明の最上位概念を示す独立請求項に記載されていない構成要素については、本発明の課題を達成するのに必ずしも必要ではないが、より好ましい形態を構成するものとして説明される。
【0056】
まず、本発明の実施の形態を説明する前に、用語を説明する。
【0057】
レーダシステムは、目標物体に向かって、送信アンテナから電波を放射する。送信アンテナから放射された電波は、目標物体の形状に応じて、さまざまな方向に散乱する。散乱した電波のうち受信アンテナに到来する電波を特に、「反射波」と呼ぶ。目標物体において、反射波が反射した点を反射点と呼ぶ。レーダシステムは、反射波に基づいて、目標物体の情報を取得する。
【0058】
目標物体の表面は、多数の散乱点(表面散乱点)を有する。反射点は、反射条件に従って物理的に定まる散乱点(以降、物理的な反射点と呼ぶ)である。レーダシステムは、反射点の位置等を推定することで、目標物体の情報を取得する。
【0059】
目標物体の表面が鏡面の球体又は平板の場合、反射条件を満たす反射点は1つに定まる。一方、例えば、人のように電波の波長に比べて大きな凹凸を有する複雑な形状を有する目標物体の場合、反射条件を満たす点は物体上に複数あるので、複数の反射点が存在する。
【0060】
物理的な反射点と測定で求めた反射点との位置が著しく異なる場合があり、これを「偽像」と呼ぶ。本明細書において、物理的な反射点を単に「反射点」、測定から求まる反射点を「測定点」と表記する。
【0061】
図1は、レーダシステム100を用いて、2人の人間(目標物体150a、150b)を検知及び追尾する状況を示す模式図である。図1に示すレーダシステム100は、1つの送信アンテナ120と、3つの受信アンテナ121a、121b及び121cとを有する。以下、受信アンテナ121a、121b及び121cをまとめて受信アンテナ121と表記することがある。
【0062】
3つの受信アンテナ121は、互いの異なる方向の反射波を受信するように設置されている。具体的に、受信アンテナ121aと受信アンテナ121bとは水平方向に並んで配置されており、受信アンテナ121aと受信アンテナ121cとは、垂直方向に並んで配置されている。
【0063】
これにより、受信アンテナ121a及び受信アンテナ121bで受信した反射波から反射点の水平方向(すなわち方位角)を計測することができる。また、受信アンテナ121a(又は受信アンテナ121b)及び受信アンテナ121cで受信した反射波から、反射点の鉛直方向(すなわち仰角)を求めることができる。さらに、受信アンテナ121a、121b及び121cで受信した反射波の少なくとも一つから、レーダシステム100と目標物体との相対速度を計測できる。
【0064】
例えば、目標物体150a及び150bの運動速度V(視線方向のスカラー量)と位置S(空間座標のベクトル量)とを、<V,S>と表す。
【0065】
目標物体150aの頭部、腕、反対側の腕、脚、反対側の脚は、それぞれ、<V11,S11>、<V12,S12>、<V13,S13>、<V14,S14>、<V15,S15>として観測され、目標物体150bの頭部、腕、反対側の腕、脚、反対側の脚は、<V21,S21>、<V22,S22>、<V23,S23>、<V24,S24>、<V25,S25>として観測される。なお、実際の観測では、さらに細かい運動状態を取得可能であるが、模式図では簡略化している。
【0066】
人間の形状になるように仮想的な反射点を設定するとともに、それぞれの反射点に対して歩行運動データを与えることで、移動する歩行者を模擬したモデルを構築する。このモデルに対して、コンピュータ上で測定点を数値計算によって求め、2人の人間を観測した結果を図2A及び図2Bに示す。
【0067】
図2Aは、目標物体150aと目標物体150bとが存在し、そのドップラー速度に干渉がない場合を示す。図2Bは、目標物体150aと目標物体150bとが、ドップラー速度が同一となる反射点をそれぞれ有する場合、つまり干渉がある場合を示す。なお、図2A及び図2Bでは、3次元の<V,S>の分布を2次元平面に投影した結果(平面図)を示しており、各点が測定点に対応している。また、原点はレーダシステム100の位置を示す。
【0068】
図2Aに示すように、複数の人間(目標物体150aと目標物体150b)のドップラー速度が干渉しない場合、目標物体150aと目標物体150bとの測定点の分布のまとまりが明確であるため、容易に両者を分離できる。
【0069】
ところが、図2Bのように、複数の人間が同一のドップラー速度を含む場合、<V,S>の分布が大きく広がり、両者を分離することが困難になる。これが、ドップラー速度の干渉による偽像である。
【0070】
このように、到来方向推定結果に誤りがあると、物体の存在する方向又は物体の形状に関わる高さ或いは幅の推定を誤ることになり、イメージング結果が乱れてしまう。これをドップラー速度の干渉による偽像という。
【0071】
以下、本発明の実施の形態を説明する。
【0072】
(実施の形態1)
図3は、本発明の実施の形態1に係るレーダシステム100の構成を表すブロック図である。図3に示すレーダシステム100は、目標物体150の位置を特定するドップラーレーダシステムである。このレーダシステム100は、送信部101aと、受信部101bと、距離算出部102と、ドップラー解析部103と、方向算出部104と、マイクロドップラー演算部105と、第1重心算出部106aと、第2重心算出部106bと、重心決定部107と、送信アンテナ120と、受信アンテナ121a、121b及び121cとを備える。
【0073】
図3に示すレーダシステム100は、目標物体150の距離、方向、及びドップラー速度を測定する。ここで距離及び方向は、レーダシステム100を基準とした距離及び方向である。また、レーダシステム100は、距離及び方向から目標物体上の測定点の位置を定め、さらにその測定点のドップラー速度を対応させる。そして、レーダシステム100は、目標物体150を構成する測定点を複数取得することにより、目標物体150の形状及び動きを推定する。
【0074】
まず、レーダシステム100の動作の概略を説明する。
【0075】
図4は、レーダシステム100による目標物体を検出する処理のフローチャートである。
【0076】
まず、送信部101aは送信信号を生成する。そして、送信アンテナ120は、当該送信信号を送信波として放射する(S101)。
【0077】
複数の受信アンテナ121a、121b及び121cの各々は、送信波が目標物体150に含まれる複数の反射点で反射された反射波を受信する。そして、受信部101bは、複数の受信アンテナ121a、121b及び121cで受信された複数の反射波の各々に対応する複数の受信信号111を生成する(S102)。
【0078】
次に、距離算出部102は、送信信号と受信信号111との遅延量を用いて、ドップラーレーダシステム100と複数の反射点との距離を算出する(S103)。
【0079】
次に、ドップラー解析部103は、各受信信号の周波数成分を解析することで、各受信信号のドップラー周波数を算出する(S104)。
【0080】
次に、方向算出部104は、ドップラー周波数ごとの複数の受信信号間の位相差を用いて、ドップラーレーダシステム100に対する複数の反射点の方向を算出する(S105)。
【0081】
次に、マイクロドップラー演算部105は、ステップS103及びS105で算出された複数の反射点の方向と距離とを用いて、複数の反射点の位置を示す複数の測定点算出する(S106)。
【0082】
次に、第1重心算出部106aは、第1の第1間隔を有する第1分割枠を用いて、複数の測定点うち、第1分割枠で分割された各第1分割領域に含まれる測定点の第1重心116aを算出する(S107)。
【0083】
また、第2重心算出部106bは、第1間隔より狭い第2間隔を有する第2分割枠を用いて、複数の測定点のうち、第2分割枠で分割された各第2分割領域に含まれる測定点の第2重心116bを算出する(S108)。
【0084】
最後に、重心決定部107は、複数の第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの第2重心116bを目標物体150の位置に決定する(S109)。
【0085】
以下、各構成について、詳細に説明する。
【0086】
<送信部101a>
送信部101aは、所望の周波数帯の搬送波を用いて送信信号を生成する。所望の周波数帯とは、例えば、マイクロ波又はミリ波の周波数である。
【0087】
送信アンテナ120は、送信部101aが生成した送信信号を、外部空間に送信波として放射する。
【0088】
<受信部101b>
受信アンテナ121a〜121cは、目標物体150で反射した送信波である反射波を受信する。以下、送信アンテナ120から放射されて目標物体150に到達するまでの波を送信波と表記し、目標物体150で反射された波を反射波と表記する。
【0089】
受信部101bは、各受信アンテナ121が受信した反射波に応じた受信信号111を生成する。ここで、受信信号111は、受信アンテナ121a、121b及び121cの各々で受信した反射波に対応する3つの受信信号を含む。また、以下では、各受信アンテナに対応する信号及び処理部を受信チャネルとも呼ぶ。
【0090】
具体的には、受信部101bは、各受信チャネルの受信信号111ごとに以下の処理を行う。受信部101bは、上記搬送波と同一周波数の信号又は同一の搬送波を用いて、反射波を復調することにより、反射波を所定の周波数帯域の信号に変換する。そして、受信部101bはこの変換後の信号を受信信号111として出力する。ここで受信信号111は、反射の有無と距離に対応した信号振幅の変動を含んでいる。よって、この受信信号111から反射点までの距離を算出できる。また、所定の周波数帯域とは、周波数ゼロの直流成分を中心としてドップラー周波数を含む周波数帯域である。
【0091】
より具体的には、受信部101bは、搬送波を第1の信号と第2の信号とに分配する。また、受信部101bは、第1の信号の位相を90度ずらし、第2の信号の位相をずらさない。次に、受信部101bは、第1の信号及び第2の信号を用いて、反射波を復調することで、上記受信信号111として、第1の受信信号及び第2の受信信号を生成する。この第1の受信信号及び第2の受信信号は、互いに直交している。また、第2の受信信号111は、I相信号(In−Phase)を意味する。第1の受信信号111は、Q相信号(Quadrature)を意味する。つまり、各受信チャネルの受信信号111は、第2の受信信号を実部とし、第1の受信信号を虚部とする複素信号である。
【0092】
また、レーダシステム100は、少なくとも2つの受信アンテナ121a及び121bを備える。そして、レーダシステム100は、受信アンテナ121aで受信した反射波と、受信アンテナ121bで受信した反射波との位相差を用いて、2次元の平面又は3次元の空間上における測定点の分布を取得することにより、目標物体150の形状、速度、又は位置を測定する。なお、この詳細は後述する。
【0093】
なお、レーダシステム100は、受信アンテナ121の個数に応じて、距離算出部102及びドップラー解析部103を複数有してもよい。具体的には、レーダシステム100は、2つの受信アンテナ121の組を1チャネルとした時、チャネルの数に応じた数の距離算出部102及びドップラー解析部103を有する。
【0094】
例えば、レーダシステム100が受信アンテナ121a、121b、121cを有する場合、レーダシステム100は3チャネル有する。具体的には、受信アンテナ121aと受信アンテナ121bとの組、受信アンテナ121bと受信アンテナ121cとの組、及び、受信アンテナ121aと受信アンテナ121bとの組の3組である。このとき、レーダシステム100は、各チャネルに対応する3個のドップラー解析部を有する。
【0095】
<距離算出部102>
距離算出部102は、受信部101bから受信信号111を取得する。そして、距離算出部102は、送信信号と受信信号111との遅延量を用いて、レーダシステム100と複数の反射点との距離を算出する。
【0096】
ここで、送信部101aが生成する送信信号に応じて、目標物体150の位置を決定する方法が異なる。例えば、送信部101aが擬似雑音符号を用いて、搬送波を変調した送信信号を生成する場合、目標物体150の位置を測定する方法はスペクトル拡散方式である。
【0097】
一方、送信部101aが搬送波をチャープ変調した送信信号を生成する場合、目標物体150の位置を測定する方法はFM−CW(Frequency Modulated Continuous Wave)方式である。また、送信部101aが周波数の異なる搬送波を2種類用い、両者を交互に送信する場合、目標物体150の位置を測定する方法は2周波CW方式である。
【0098】
なお、送信部101aが搬送波を全く変調しない場合は、CW(Continuous Wave)方式となるが、CW方式では距離計測は原理上行えない。
【0099】
また、本実施の形態では、スペクトル拡散方式を用いる場合を例に説明する。
【0100】
スペクトル拡散方式レーダは、送信時には擬似雑音符号を用いて搬送波を変調(拡散)するとともに、受信時には反射波を復調(逆拡散)することにより擬似雑音符号を再生し、送受間での擬似雑音符号の遅延量を評価する。そして、該レーダは、その遅延量から目標物体までの距離を算出する。
【0101】
つまり、距離算出部102は、送信用の擬似雑音符号(以降、送信用符号)と、送信用符号をシフトさせた受信用の擬似雑音符号(以降、受信用符号)とを用い、電波の往来(すなわち反射)で生じる送信用符号の遅延を算出する。具体的には、距離算出部102は、送信用符号と受信用符号との相関を計算し、相関が予め定めた閾値以上の極大値となるときの受信用符号の符号シフト量から距離を算出する。また、反射波がない場合は閾値を超える極大値がないため、距離は定まらない。異なる距離からの反射波が到来した場合は、閾値を超える極大値が相等の個数だけ存在するので、それぞれの距離を定めることができる。
【0102】
スペクトラム拡散方式を用いた場合、距離算出部102は、以下の(式3)を用いて距離(R)を決定する。
【0103】
R=cD/2b ・・・(式3)
【0104】
ここで、b[bit/sec]([chip/sec])は擬似雑音符号のレートであり、D[bit]([chip])は相関最大時の符号シフト量であり、c[m/sec]は光速である。
【0105】
なお、シフト量D=1のときの値をレンジ分解能と呼ぶ。レンジ分解能を単位(レンジビンという)として離散的に距離Rが定まり、それぞれのレンジビンごとに独立して信号処理を行うことができるようになる。
【0106】
ここで、レンジ分解能をΔRとする。レーダシステム100が検出できる最大探知距離をRmaxとし、Mを整数とするとき、Rmax=M×ΔRと表される。また、iを1≦i≦Mの整数とすると、符号シフト量D=iに対応して、距離レンジR(i)=i×ΔRが定められる。この指標iを距離レンジ番号と呼ぶことにする。このように、距離レンジR(i)は、(i−1)×ΔR<r≦i×ΔRを満たす距離rの範囲を示している。
【0107】
また、距離算出部102の出力をレンジ出力112という。レンジ出力112も複素形式であるとする。
【0108】
なお、スペクトル拡散方式で無い場合には、距離レンジが単一のR(1)のみから構成されるとして扱い、R(1)にそれぞれの方式で計測された距離を割り当てておくとよい。また、CW方式のように距離情報を持たない場合、例えばR(1)=∞などのように、物理的に無意味な数値を割り当てておくとよい。
【0109】
なお、距離算出部102、並びに、後述するドップラー解析部103及び方向算出部104で行われる信号の処理結果は、記憶部(図示せず)に格納しておくとよい。さらに、各処理部が、この記憶部に対する、処理結果の追加、更新、及び消去できるように構成しておくとよい。このように記憶部を介することで、レンジ出力112の時系列データに対して、その観測の時間幅(すなわち窓長)を自在に設定できるようになる。
【0110】
図5Aは、レンジ出力112の構成を示す図である。図5Aに示すようにレンジ出力112は、距離レンジ番号ごとにIQ信号を含む。さらに、各IQ信号は、受信アンテナ121a〜121cの各々に対応する3つのIQ信号(sa(i)、sb(i)、sc(i))を含む。
【0111】
図5Bは、記憶部に記憶されるレンジ出力112を示す図である。図5Bに示すように、時系列のレンジ出力112が記憶部に蓄積される。
【0112】
<ドップラー解析部103>
ドップラー解析部103は、レンジ出力112の周波数成分を解析し、レンジ出力112に含まれるドップラー周波数成分と、そのパワー及び位相を算出し、算出結果をドップラー出力113として出力する。
【0113】
周波数解析の方法は、例えば高速フーリエ変換(FFT)である。設定された窓長内に限った現象を解析する場合、短時間フーリエ変換(STFT:Short−Time Fourier Transform)が用いられる。ここでは、このSTFTを単にFFTと表す。また、周波数の解析処理の意味をわかりやすく説明するために、このFFTをドップラー信号処理とも呼ぶ。
【0114】
以下、レンジ出力112に含まれる特定の距離レンジR(i)を取り出して、周波数解析を行う場合を説明する。
【0115】
ここで、図5Bに示すように、レンジ出力112は、時系列で記憶部に格納されている。Nを1以上の整数とするとき、ドップラー解析部103は、記憶部に格納されている複数のレンジ出力112のうち、最新のものからNセット選択する。例えば、距離レンジR(i)におけるレンジ出力(IQ信号)を記号s(i)で表し、サンプリング番号h(1≦h≦N)に対するIQ信号をs(i,h)と表すと、距離レンジR(i)におけるNサンプルの時系列信号が得られる。ただし、h=1が最新データ、h=Nが最古データとなるように指標付けを行うようにする。ドップラー解析部103は、このNサンプルの時系列信号s(i,h)(1≦h≦N)に対してFFTを行う。これは、距離レンジごとに窓長がNのFFTを行っていることに相当する。
【0116】
なお、記憶部の容量は有限であるから、不要になった古いIQ信号は記憶部から消去するようにしておくとよい。
【0117】
ここで、レンジ出力112は複素数であり、FFTの結果(ドップラースペクトル)は、レンジ出力112におけるパワーの周波数特性を表すパワースペクトルと、位相の周波数特性を表す位相スペクトルとを含む。
【0118】
したがって、解析されたドップラースペクトルを用いれば、スペクトルのピークを検出し、そのピーク位置(ドップラー周波数)に対するパワーと位相とを読み取ることができる。
【0119】
そして、ドップラー解析部103は、これらの情報を含むドップラー出力113を記憶部に格納する。
【0120】
図5Cは、ドップラー出力113の構成を示す図である。図5Cに示すように、ドップラー出力113は、ドップラースペクトルのピーク周波数(すなわちドップラー周波数)F、パワーP、及び位相φを含む。また、ピークは単一とは限らないので、これを集合{F,P,φ}のように表す。
【0121】
また、ドップラー解析部103は、ドップラースペクトルでピーク検出した際、ピークではない点のパワーPをゼロ又は負数(例えば、−1又は−P)に書き換えておくことで、パワーPが正数か否かによってピークか否かを判別できるようにしておく。また、ドップラー周波数の単位をドップラービンといい、その指標を「ドップラー周波数番号」と呼ぶことにする。
【0122】
このとき、ドップラー周波数番号kとドップラー周波数Fとの関係は一次関数で示される。例えば、FFTの周波数分解能がΔFで、ドップラー周波数番号N/2が直流成分(周波数ゼロ)であるとき、ドップラー周波数番号kに対応するドップラー周波数はF=(k−N/2)ΔFである。
【0123】
また、ドップラー周波数Fとドップラー速度Vdとは比例関係にあり、相互に換算することができる。例えば比例係数γにより、Vd=γFと表される。すなわち、ドップラー速度が同一か否かの議論は、ドップラー周波数が同一か否かの議論と同じであり、以降では「ドップラー周波数」を用いて説明する。ただし、「ドップラー速度の干渉」の場合は、「ドップラー速度」で表現している。
【0124】
このドップラー解析部103により、目標物体150を構成する複数の運動部位について、各々の運動速度の視線方向成分が明らかになる。
【0125】
ドップラー出力113は、受信チャネルの数だけ並列に存在している。例えば、受信チャネル数が3の場合、ドップラー出力113a、113b及び113cのように区別し、それぞれ受信アンテナ121a、121b及び121cと対応する。なお、ドップラー出力113とのみ表現した場合は、受信チャネルの区別なく、全てを含むとする。
【0126】
また、それと対応するようにドップラー出力113を構成する要素の集合K(一般に複数のピークを有する)をKa、Kb及びKcのように区別し、Ka={Fa,Pa,φa}、Kb={Fb,Pb,φb}、Kc={Fc,Pc,φc}のように表す。
【0127】
また、ドップラー周波数番号k(1≦k≦Nなる整数)と、距離レンジ番号i(1≦i≦M)とを用いて、集合の要素Ka(i,k)=(Fa(i,k),Pa(i,k),φa(i,k))のように表現する。なお、要素の指標を省略して、Ka(i,k)=(Fa,Pa,φa)のように簡略に表記する。これは、受信アンテナ121aで受信した信号の、レンジ出力112のi番目の距離レンジに対するドップラー信号処理の結果における、k番目の周波数Fa(i,k)と、それに対するパワーPa(i,k)、位相φa(i,k)を示す。他についても同様である。
【0128】
<方向算出部104>
方向算出部104は、複数の受信信号間の位相差を用いて、レーダシステム100に対する複数の反射点の方向を算出する。具体的には、方向算出部104は、ドップラー出力113a、113b及び113cを受け付ける。
【0129】
方向算出部104は、ドップラー出力113a、113b及び113cに含まれる位相φa、φb及びφcを用いて、各受信チャネル間の位相差を計算する。このとき、受信チャネル間の位相差は、Δφab=φb−φa、Δφac=φc−φaである。このようにドップラー出力113で対を形成し、当該対の位相を比較することは、「干渉計を構成」していることを意味する。
【0130】
なお、説明を簡略にするため、ここでは距離レンジ番号i及びドップラー周波数番号kによる指標(i,k)を省略して表記している。
【0131】
方向算出部104は、この位相差を用い、到来方向を算出する。
【0132】
図6は、到来方向の算出処理を説明するための図である。
【0133】
まず、方向算出部104は、受信アンテナ121aに対応する位相φaと、受信アンテナ121bに対応する位相φbとから、位相差Δφabを算出する。そして、方向算出部104は、この位相差Δφabを下記(式4)のΔφに代入することにより到来方向θを算出する。
【0134】
θ=sin−1(λΔφ/2πd) ・・・(式4)
【0135】
ここで、λは送信波の波長であり、dは受信アンテナ121aと受信アンテナ121bとの距離である。また、λΔφは、受信アンテナ121aと受信アンテナ121bとで構成される干渉計における行路差である。
【0136】
そして、方向算出部104は、位相差Δφabを用いて算出した到来方向θを方位角Aとして出力する。
【0137】
また、方向算出部104は、(式4)及び位相差Δφacを用いて算出した到来方向θを仰角Eとして出力する。
【0138】
図7Aは、方向出力114の構成を示す図である。図7Aに示すように、方向算出部104の出力である方向出力114は、ドップラー周波数Fの測定点に対する方位角A及び仰角Eの情報を含む。すなわち、方向出力114は、F(i,k)に対するA(i,k)及びE(i,k)を含んでいる。
【0139】
このとき、方向出力114の内容(集合の要素)を、L(i,k)=(A(i,k),E(i,k))と表すことにする。なお、これをL(i,k)=(A,E)と簡略に表記する。
【0140】
<マイクロドップラー演算部105>
マイクロドップラー演算部105は、複数の反射点の方向と距離とを用いて、複数の反射点の位置である測定点を算出する。
【0141】
具体的には、マイクロドップラー演算部105には、レンジ出力112、ドップラー出力113及び方向出力114が入力される。
【0142】
マイクロドップラー演算部105は、レンジ出力112に含まれる距離Rの情報{R}と、ドップラー出力113に含まれる周波数F、パワーP、及び位相φの情報{F,P,φ}と、方向出力114に含まれる方位角A及び仰角Eの情報{A,E}とを距離レンジ番号と抽出ピーク番号との指標によって相互に関連付けすることで、ドップラー周波数Fを有する測定点の距離R、パワーP、方位角A及び仰角Eを決定する。
【0143】
より具体的には、マイクロドップラー演算部105は、レンジ出力R(i)と、ドップラー出力K(i,k)=(F,P,φ)と、方向出力L(i,k)=(A,E)とを用い、指標番号1≦i≦M,1≦k≦Nでそれぞれの出力にアクセスすることで、測定点Qp(i,k)=(F,P,R,A,E)を決定する。そして、マイクロドップラー演算部105は、このQpをマイクロドップラー出力115として出力する。
【0144】
図7Bは、マイクロドップラー出力115の構成を示す図である。
【0145】
なお、マイクロドップラー演算部105は、極座標をなす測定変数(R,A,E)を、必要に応じて直交座標系の測定変数(X,Y,Z)に変換したうえで出力してもよい。この場合、測定点Qr(i,k)=(F,P,X,Y,Z)である。X,Y,Zはそれぞれレーダの正面方向に対して、左右方向(横方向、広がり)、前後方向(縦方向、奥行き)、上下方向(高さ方向)の座標値である。
【0146】
なお、受信チャネル数が2の場合、2次元の測位しかできないため、全ての仰角EをE=0とみなすことで上述の説明をそのまま適用できる。
【0147】
マイクロドップラー出力115は、第1重心算出部106a、及び重心決定部107で処理され、最終的に目標物体150の重心位置が出力される。また、目標物体の個数に対応した個数の重心位置が出力される。
【0148】
なお、マイクロドップラー演算部105は、ドップラー周波数ごとに距離レンジ方向の反射パワーを表示し直した波形を用い、レンジ分解能以下の距離を補間してもよい。こうすることで、距離決定精度を向上できる。
【0149】
重心算出部106及び重心決定部107の詳細を説明する前に、図8A、図8B、図9A及び図9Bを用いて、本発明者らが見出した知見に基づく本実施の形態の特徴を説明する。
【0150】
図8A及び図8Bは、同一レンジ内に、同一ドップラー周波数を有する2つの反射点が観測された場合の測定点を示す図である。図8A及び図8Bにおける反射点の大きさは、反射パワー(強度P)を表現している。
【0151】
図8Aは、略同一の反射パワーを有する2つの反射点161a及び161bがある場合の測定点を示す図である。ここで、略同一の反射パワーとは、略同一の散乱断面積と読み替えることができる。つまり、例えば、反射点161aと161bとは、異なる人の2つの胴体である。
【0152】
このような例では、測定点131の位置は、反射点161aと161bとの中間位置になることが実験により経験的にわかっている。
【0153】
一方、図8Bは、反射パワーの差が大きい2つの反射点162a及び162bがある場合の測定点を示す図である。例えば、反射点162aは左脚であり、反射点162bは右腕である。
【0154】
運動を時系列でみると、胴体がほぼ一方向を向いて反射パワー(散乱断面積)の変動が小さいのに対して、脚及び腕の向きなどが刻々と変化する。よって、それらの散乱断面積が変化して見える。したがって、反射パワーの差が大きい場合は、このような散乱断面積の時系列変動も加わって、測定点132の位置が予測不能になることが経験的にわかっている。
【0155】
そもそも、同一ドップラー周波数の反射波が到来する場合、定性的にどのような現象が起こるのか、簡単なモデル(数式)を用いて説明する。
【0156】
個別の反射点から受信アンテナに到来する反射波をそれぞれ(式5)で示すs1(t)、s2(2)、s3(t)、・・・とする。
【0157】
【数1】
【0158】
このとき、実際に受信アンテナで受信される電波の波形はこれらを重ね合わせた(合成した)ものとなる。このうち干渉する同一ドップラー周波数の成分だけに着目すると、周波数項が共通になるので、位相項だけに注目すればよい。この位相項は(式6)で示される。
【0159】
【数2】
【0160】
この(式6)より、合成位相Φは(式7)のようになる。
【0161】
【数3】
【0162】
到来方向DOAは、合成位相Φの受信アンテナ間の位相差ΔΦ及び定数Kを用いて、(式8)のように表される。ここで、DOAは簡単のため、受信チャネル数2の場合とする。
【0163】
【数4】
【0164】
続いて、これらの数式を用い、反射パワーの比すなわち、反射パワーの変動に対して、DOAがどのような影響を受けるかを検証した。
【0165】
図9A及び図9Bは、2つの反射点のパワーの差が到来方向推定に与える影響を計算した結果を示す図である。2つの反射点がそれぞれ+π/4、−π/4の方向にあり、K=1/π(受信アンテナ間隔が送信波長の半分の場合に相当)の場合を想定する。
【0166】
図9Aは、2つの反射点の反射パワーの比が3dB以下でランダムに変動する場合、同図9Bは、反射パワーの比が26dB以下でランダムに変動する場合を表す。それぞれ、2つの反射点のパワーの変動が3dB以内、26dB以内の結果と考えればよい。図9A及び図9Bは、そのパワー変動に対して計算されるDOA結果の分布をヒストグラムで表した図である。試行回数5000回とする。
【0167】
図9Aに示すように、2つの反射点のパワーの差が小さい場合、±π/4の中間付近の0radにおいて±0.05radの範囲内、すなわち10m離れた地点で幅1mの範囲内に測定点が集中している。
【0168】
一方、図9Bに示すように、2つの反射点のパワーの差が大きい場合、10m離れた地点で幅5mの範囲に測定点が大きく広がって分布している。
【0169】
このことから、反射点のパワー(散乱断面積)の変動が大きい運動部位では、測定点の分布が大きいことが分かる。さらに反射点の状態が刻々と変化する場合には、測定点の位置が刻々と動き回るという、不確定な状態になる。これを「不安定な測定点」と呼ぶことにする。
【0170】
逆に言えば、反射パワーが略同一となるような比較的パワーの大きい2つの反射点(人間2人の胴体同士など)があれば、パワーの大きい測定点が反射点同士の中間位置に現れることがわかる。これを「準安定な測定点」と呼ぶことにする。
【0171】
本発明は、この準安定な測定点を利用することで、ドップラー速度の干渉によって生じる偽像から、目標物体の元の反射点の位置を推定する手段を与えるものである。
【0172】
また、準安定な測定点の原理と意義を考えると、2つの等価な測定点があることが前提としてある。このことから、本実施の形態においては、偽像が発生した場合に目標物体の個数を最大2とみなすことで、簡便に物体の位置を推定し、両者の分離を実現できるという特徴がある。
【0173】
<重心算出部106>
次に、重心算出部106について、図10及び図11を用いて説明する。
【0174】
重心算出部106は、第1重心算出部106aと第2重心算出部106bとを含む。
【0175】
第1重心算出部106aは、第1間隔を有する第1分割枠を用いて、複数の反射点うち、各分割枠内に含まれる反射点の第1重心116aを算出する。第2重心算出部106bは、第1間隔より狭い第2間隔を有する第2分割枠を用いて、複数の反射点のうち、各分割枠内に含まれる反射点の第2重心116bを算出する。
【0176】
つまり、重心算出部106は、観測領域をいくつかの領域に分割し、分割された領域ごとに重心を算出する。領域を分割するための区切りを「分割枠」と表現する。また、分割枠で区切られた各々の領域を「分割領域」と表現する。
【0177】
分割枠は、算術上の概念である。例えば、観測領域内の位置を表す実数xを用いて、観測領域全体を−2a≦x≦2aで表す。この観測領域全体を4つの領域(1)−2a≦x<−a、(2)−a≦x<0、(3)0≦x<a、(4)a≦x≦2aに分けるとき、x=0、±a、±2aが分割枠を示す。
【0178】
なお、上の例は一次元の分割枠の場合であるが、2つの実数(x、y)を用いることで2次元の分割枠を形成できる。例えば、x=0,±a,±2a,・・・、y=0,±2a,±4a,・・・により分割枠を形成すれば、観測領域を、直交座標系における短辺a及び長辺2aの長方形からなる複数の分割領域に分割できる。
【0179】
本実施の形態では、直交座標系における正方形の単調な分割枠(正方分割枠)を用いる例について説明を行う。
【0180】
正方分割枠を用いる場合、その格子間隔を目標物体に適した大きさにしておくことによって、複数の目標物体をその格子を基準に分離できるという利点がある。この理由については格子間隔の設定方法のところで後述する。
【0181】
まず、分割枠のパターンの表記について説明する。
【0182】
一辺の長さaの正方分割枠の基本格子パターンを設け、それをSQ[a]と表す。ここで基本格子パターンとは例えば、分割枠の格子交差点が測定系の原点と一致するように設けた格子パターンである。そして、基本格子パターンSQ[a]をx方向にΔ1×a、かつy方向にΔ2×aだけ平行移動した格子パターンをSQ[a|Δ1,Δ2]と表す。
【0183】
例えば、SQ[a|0.5,0.5]と表した場合、基本格子パターンSQ[a]をx方向に+0.5a、y方向に+0.5aだけ平行移動した格子パターンを示す。
なお、SQ[a|0,0]=SQ[a]である。
【0184】
また、複数の分割領域の中から特定の分割領域を指し示す場合は、SQ[a|0,0](“識別子”)のように、識別番号及び識別アドレスを識別子として付加するものとする。
【0185】
例えば、分割枠SQ[a|0,0]のアドレス(1,−3)の分割領域に識別記号“S1”が付与されているのであれば、これをSQ[a|0,0](S1)又はSQ[a|0,0](1,−3)のように示す。
【0186】
本実施の形態では、異なる辺の長さ、異なる位置関係(平行移動)を組み合わせた4パターンの正方分割枠を使用する。
【0187】
すなわち、SQ[D1|0,0]、SQ[D1|0.5,0.5]、SQ[D2|0,0]、SQ[D2|0.5,0.5]の4パターンである。なお、D1≠D2である。
【0188】
ここで、上記の格子パターンで構成される分割枠を、順にそれぞれ第1分割枠A(第3分割枠)、第1分割枠B(第4分割枠)、第2分割枠A(第5分割枠)、第2分割枠B(第6分割枠)と呼ぶことにする。
【0189】
また、第1分割枠A及びBは第1重心算出部106aで用いられ、第2分割枠A及びBは第2重心算出部106bで用いられる。
【0190】
図10(a)、図10(b)、図11(a)及び図11(b)は、それぞれ、第1分割枠A、B、第2分割枠A及びBを用いた処理の一例を示す図である。
【0191】
図10(a)に示すように、第1重心算出部106aは、第1分割枠Aを用い、分割枠の区切り単位(分割領域内)の測定点の重心である第1重心A(第3重心)を算出する。次いで、図10(b)に示すように、第1重心算出部106aは、第1分割枠Bを用い、分割領域内の第1重心Aの重心である第1重心B(第1重心116a)を算出する。
【0192】
ここで、1つの分割枠だけで重心を算出すると、その分割枠の区切り位置によって結果が左右されてしまう。これに対して、互いに平行移動した2パターンの分割枠A及びBを用いることで、この区切り位置の依存性を小さくすることができる。例えば、1パターンの分割枠のみを用いた場合に、単一の目標物体が当該分割枠で分断されると、2つの重心が求まってしまう場合が考えられる。しかし、2パターンの分割枠を使用することによって、それら2つの重心が改めて1つに統合される。また、第1重心A及びBは目標物体の個数及び大きさなどに応じて、複数点算出される。
【0193】
同様に、図11(a)に示すように、第2重心算出部106bは、第2分割枠Aを用い、分割領域ごとの測定点の重心である第2重心A(第4重心)を算出する。次いで、図11(b)に示すように、第2重心算出部106bは、第2分割枠Bを用い、分割領域内の第2重心Aの重心である第2重心B(第2重心116b)を算出する。この第2重心A及びBは目標物体の個数及び大きさなどに応じて、複数点算出される。
【0194】
この重心を算出するための式を(式9)に示す。前述の通り、分割領域ごとにドップラー周波数の区別無く計算を行う。
【0195】
【数5】
【0196】
(式9)に示すように、重心算出部106は、目標物体から得られるマイクロドップラーの測定点群(集合)Qp={F,P,R,A,E}(極座標系)又はQr={F,P,X,Y,Z}(直交座標系)について、領域ごとにパワー加重平均を求める。なお、重心算出部106は、Qp及びQrどちらかに限らず、その両方についてパワー加重平均を求めてもよい。ここでパワー加重平均は、反射点のパワー又は散乱断面積の大きさを反映した平均量であるから、目標物体のマクロな運動を表す。すなわち、この算出方法は、胴体部などの散乱断面積の大きな部位を人間の移動中心とみなす操作と等価であり、実際の人間の移動軌跡と矛盾の無い結果を与える算出方法である。
【0197】
また、重心は、位置の平均のみならず、ドップラー周波数の平均値及び反射パワーの平均値も含めた呼称である。なお、ここでは、重心は、位置、速度(ドップラー周波数)及び反射パワーの平均値であるが、重心として位置の平均値のみを用いてもよいし、速度及び反射パワーの平均値の少なくとも一方と、位置の平均値とを用いてもよい。
【0198】
次に、分割枠の格子間隔(辺の長さ)の設定について説明する。
【0199】
本実施の形態では、目標物体として歩行者などの人間を想定している。人間の横幅をWhとするとき、実施の形態1では、D2=2Wh、D1=6Wh(D1/D2=3)に設定することが好ましい。例えば、人間の横幅として0.5mを採用し、Wh=0.5mの固定値を用いてもよい。
【0200】
このように設定すると、図11に示す第2重心算出処理の結果、第2重心BはD2/2すなわちWh四方の領域ごとに1点ずつ定まることになる。すなわち、目標物体として想定している人間の大きさを単位として、その重心の位置を求められることを意味する。したがって、目標物体(人間)が複数存在しても、目標物体の個数に応じた重心が算定されるという特徴を有する。
【0201】
また、図10に示す第1重心算出処理では、第2分割枠の3倍の間隔を有する第1分割枠を用いることが好ましい。図11と同様に議論すれば、第1重心BはD1/2すなわち3Wh四方の領域ごとに1点ずつ定まる。これは、例えば、2人の歩行者が人一人分離れた状態にあるとき、その重心を分離できる設定に相当する。
【0202】
つまり、第1重心算出部106aでは、前述の「準安定な測定点」を求めることを目的としている。そのため、2人の人間の重心の間に、もう1点重心を置く枠が必要となる。ドップラー速度の干渉によって偽像が発生している場合、「人一人分」の余裕が「準安定な測定点」の結果を算出するための枠として必要である。よって、D1/2=3Whと設定することが望ましいといえる。ただし、厳格にD1/D2=3である必要はなく、D1/D2>2の範囲で設定すればよい。
【0203】
なお、分割枠の間隔は固定値である必要は無く、動的に増減してもよい。具体的には、観測領域内の物体の状況に応じて分割枠の間隔を変化させることで、物体の状況を反映した重心の算出が可能になる。例えば、2人組の人間がいる場合は、間隔を広げて2人組を一括りで扱えるようにしたり、あまりにも偽像が著しい場合も間隔を広げ、算出する重心の数を敢えて減らすようにしたりすることができる。
【0204】
また、ここでは、目標物体が人間の場合を例に説明しているが、目標物体は人間以外であってもよい。この場合、上記Whは目標物体の大きさである。つまり、D2は、目標物体の幅の略2倍であり、D1は、D2の2倍以上であることが好ましい。また、略2倍とは、例えば、1.5〜2.5倍である。
【0205】
このように、重心算出部106においては、第1重心算出部106aによって、複数(特に2つ)の物体の合成重心、又は、ドップラー速度の干渉時には準安定な測定点を算出し、第2重心算出部106bによって、複数物体の個々の重心、又は、ドップラー速度干渉時の個々の重心の候補を算出する。
【0206】
以下、実際の処理について例を挙げて説明する。
【0207】
まず、図10を用いて、第1重心116aの算出処理について説明する。分割領域は図中に示されたA01、B03を用いて簡単に表記する。例えば、SQ[6Wh|0,0](A01)を単に領域A01と記し、SQ[6Wh|0.5,0.5](B03)を単に領域B03と記す。
【0208】
図10(a)に示すように、測定点は領域A03及びA04に分布しているので、第1重心算出部106aは、領域A03内での重心、及び領域A04内での重心である第1重心Aをそれぞれ計算する。このとき、これら第1重心AをG(A03)、G(A04)と表す。
【0209】
次に、図10(b)に示すように、第1重心Aは領域B01内にG(A03)及びG(A04)が存在し、それ以外には存在しない。そこで、第1重心算出部106aは、領域B01内の第1重心Bを重心G(A03)及びG(A04)を用いて算出する。第1重心算出部106aは、算出式として(式9)を用い、第1重心Aの値を測定点の値として(式9)に代入する。このように第1重心BとしてG(B01)が算出される。
【0210】
この例では、第1重心Bの結果が1つしか算出されなかったが、測定点の分布に依存して結果は当然異なる。
【0211】
また、第1重心算出部106aで使用する第1分割枠が第2重心算出部106bで使用する第2分割枠より間隔が広いため、第1重心Bをわかりやすく「広域の重心」と呼ぶ場合がある。
【0212】
続いて、図11を用い、第2重心の算出処理について説明する。
【0213】
第2重心の算出処理は、用いる格子パターンが第1重心の算出処理と異なり、それ以外は第1重心の算出処理と同じである。したがって、算出された重心結果について、第2重心Aをg(a1)、第2重心Bをg(b1)などのように記して図中に示す。g(b1)はg(a1)とg(a2)との重心であり、g(b2)はg(a3)とg(a4)との重心であり、g(b3)はg(a5)と同じである。
【0214】
また、第2重心Bは、第1重心Bの「広域の重心」と対比させて、「個体の重心」と呼ぶ場合がある。
【0215】
以上のように、第1重心算出部106aは第1重心116aとして、例えばG(B01)を出力する。第2重心算出部106bは第2重心116bとして、例えば、g(b1)、g(b2)及びg(b3)を出力する。
【0216】
<重心決定部107>
重心決定部107には、第1重心116a(広域の重心)、及び第2重心116b(個体の重心)が入力される。重心決定部107は、第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの重心を目標物体の位置として抽出する。つまり、重心決定部107は、第1重心116aと第2重心116bとを用いて、真の目標物体の個数に相当する重心を選別する機能を有する。
【0217】
図12のフローチャートを用い、重心決定方法を説明する。
【0218】
まず、重心決定部107は、全領域で第1重心116a及び第2重心116bが共に1個ずつであるか否かを判定する(S201)。
【0219】
全領域で第1重心116a及び第2重心116bが共に1個ずつである場合(S201でYes)、重心決定部107は、目標物体(人)が1体であると判定し、当該第2重心116bを目標物体の位置に決定する(S211)。
【0220】
一方、全領域で第1重心116a及び第2重心116bが複数である場合(S201でNo)、重心決定部107は、距離レンジごとに以下の処理を行う。ここで、距離レンジが異なる場合干渉は発生しないので、距離レンジ間では干渉の影響を考慮する必要はない。
【0221】
まず、重心決定部107は、距離レンジごとに第1重心116a及び第2重心116bを分離する(S202)。
【0222】
次に、重心決定部107は、第1重心116a及び第2重心116bが含まれる距離レンジのうち一つを選択する(S203)。
【0223】
次に、重心決定部107は、ステップS203で選択した距離レンジに含まれる第1重心116a及び第2重心116bが共に1個ずつであるか否かを判定する(S204)。
【0224】
距離レンジに含まれる第1重心116a及び第2重心116bが共に1個ずつである場合(S204でYes)、重心決定部107は、距離レンジ内に目標物体(人)が1体のみ含まれると判定し、当該第2重心116bを目標物体の位置に決定する(S209)。
【0225】
一方、距離レンジに含まれる第1重心116a及び第2重心116bが複数である場合(S204でNo)、重心決定部107は、第1重心を基準にして第2重心を2つのグループ(左グループ及び右グループ)に分割する(S205)。そして、重心決定部107は、第1及び第2グループから、少なくとも1点ずつ第2重心を選択し、選択した第2重心を目標物体150の位置に決定する。
【0226】
図13A及び図13Bは、ステップS205〜S208の処理を説明するための図である。
【0227】
図13Aに示す例では、選択された距離レンジに1個の第1重心G(B01)と、3個の第2重心g(b1)、g(b2)及びg(b3)とが含まれている。この場合、重心決定部107は、第1重心G(B01)を通り、かつy軸に並行な直線を基準に、第2重心g(b1)、g(b2)及びg(b3)を、当該直線より左側に位置する左グループと、当該直線より右側に位置する右グループとに分割する。この例では、左グループに第2重心g(b1)が含まれ、右グループに第2重心g(b2)及びg(b3)が含まれる。
【0228】
次に、重心決定部107は、各グループからパワーの大きい点を最大で2点ずつを選択する(S206)。ここでは、右グループに1点、左グループに2点、第2重心が含まれているので、重心決定部107は、左グループの第2重心g(b1)と、右グループの第2重心g(b2)及びg(b3)とを選択する。
【0229】
次に、重心決定部107は、ステップS206で選択した第2重心のうち、左グループから1点、かつ右グループから1点を選択し、選択したペアごとに、当該ペアに含まれる2点の重心M(ペア重心)を算出する(S207)。ここでは、図13Bに示すように、g(b1)とg(b2)との重心M12と、g(b1)とg(b3)との重心M13とが算出される。
【0230】
次に、重心決定部107は、第1重心と重心Mとの距離が最小となるペアを選択し、選択したペアに含まれる2つの第2重心を目標物体の位置に決定する(S208)。ここでは、図13Bに示すように、第1重心G(B01)に最も近い重心Mは、重心M12なので、重心決定部107は、重心M12のペアに含まれる第2重心g(b1)及びg(b2)を選択する。つまり、この場合、重心決定部107は、第2重心g(b1)と、第2重心g(b2)とに目標物体がそれぞれ存在すると判定する。
【0231】
ここで、2人の目標物体が存在する場合、マイクロドップラー出力115で示される測定点には、2人の目標物体の胴体に対応する「準安定な測定点」と、2人の目標物体の腕や脚等に対応する「不安定な測定点」とが混在する。そして、第1重心116aは、この混在する測定点の重心である。言い換えると、第1重心116aは、準安定な測定点(偽像)の重心に対応する。また、第2重心116bは、この混在する測定点のうち、準安定な測定点に対応する反射点、つまり、2人の目標物体の胴体の重心の候補である。
【0232】
そして、この例では、3つの第2重心116bが算出されている。また、上述した第1重心に最も近いペアを選択する処理は、この3つの第2重心116bから、準安定な測定点に対応する2つの反射点、つまり、2人の目標物体の重心を選択する処理に相当する。
【0233】
全ての距離レンジに対してステップS203〜S209の処理が終了していない場合(S210でNo)、ステップS203において、別の距離レンジが選択され、選択された距離レンジに対してステップS204以降の処理が行われる。また、全ての距離レンジに対してステップS203〜S209の処理が終了した場合(S210でYes)、重心決定部107は、重心決定処理を終了する。つまり、各距離レンジにおいて、ステップS208又はS209で選択された第2重心が目標物体の位置と決定される。
【0234】
なお、スペクトラム拡散方式レーダにおけるレンジ分解能は、上記のWhと同程度に設定しておくことが好ましい。例えば、レンジ分解能は、0.3m〜0.6mであることが好ましい。なお、レンジ分解能は、擬似雑音符号の符号レートbを調整することで変更することができる。
【0235】
また、距離分解能を向上するためにレンジ分解能を例えば0.1mなど細かく設定する必要のある場合は、距離を細かく設定したうえで、重心決定部107は、複数の距離レンジ(例えば3レンジ又は6レンジ)を統合し、統合した仮想レンジごとにステップS203〜S209の処理を行なってもよい。
【0236】
また、ステップS205〜S208において、第2重心116bそのものを用いるのではなく、第1重心116aを用いて第2重心116bを補正してもよい。具体的には、重心決定部107は、左グループに含まれる第2重心116bと、右グループに含まれる第2重心116bとに、第1重心116aのドップラー周波数及びパワーを等分配する。そして、重心決定部107は、その分配されたドップラー周波数と元の第2重心116bの周波数とを用い、補正後の第2重心116bの周波数を算出してもよい。こうすることで、偽像のある場合に第2重心116bから失われていた干渉によるドップラー周波数成分(すなわちドップラー速度成分)を補償できる。これにより、真に近い情報を反映できるようになる。
【0237】
なお、本実施の形態では、正方格子パターンを用いた場合について説明したが、図14A〜図15Cに示すようなさまざまな格子パターンを適用してもよい。
【0238】
図14Aは2次元の矩形格子を示し、正方格子はこの特殊な場合である。
【0239】
図14Bは1次元の矩形格子を示す。この1次元の矩形格子は、ドップラー速度の干渉による偽像が方向推定のエラーで起こることに特化して、距離方向の区切りを省略したものである。なお、スペクトラム拡散方式レーダでは、そのレンジ分解能を距離方向の区切りとして用いることができる。
【0240】
また、図14A及び図14Bに示す矩形格子は、その遠近に関わらず、横方向(x方向)の間隔が均等になるため、目標物体の距離に関わらずその実体の大きさ(幅)に対応した一意の区切りが可能である。よって、これらの矩形格子は、目標物体の大きさを利用して複数物体を分離する場合に扱いやすいという利点がある。
【0241】
一方、図14C及び図14Dはそれぞれ2次元、及び1次元の扇状格子を示している。レーダの測定系が極座標系であるため、格子が扇形であると処理の上での親和性が高い。
【0242】
図15Aは、1次元の矩形格子と距離方向の扇状格子とを組み合わせた格子パターンである。この格子は、矩形格子による物体の大きさを反映した物体分離と、扇状格子による測定系(偽像発生のメカニズム)の親和性とを加味した構成である。
【0243】
また、図15B及び図15Cに示すように、精度を高めたい距離又は方向に対して区切り幅を狭めたような格子間隔を設定してもよい。
【0244】
(変形例1)
また、第1重心116aに応じて、第2分割枠を決定してもよい。例えば、図16Aに示すように、距離レンジごとに第1重心116aを1点決定し、第2分割枠Aの交点座標を第1重心116aと一致させるように設定する。このようにすることで、第1重心116aに対する左右の位置関係を意識して動的に第2重心116bの算出及び重心の決定を行える。
【0245】
さらに、図16Bに示すように、図14Bに示す1次元の矩形格子と、スペクトラム拡散方式で定まる距離レンジとを組み合わせるとともに、距離レンジごとに矩形格子の区切り位置を、当該区切り位置が第1重心と一致するように左右にシフトさせてもよい。
【0246】
(変形例2)
第2重心算出部106bにおいて第2重心116bを算出する際、分割領域内の測定点の個数、すなわち、重心に寄与した測定点数を記録するようにしておいてもよい。そして、重心決定処理(図12)において、第2重心116bの中から重心に寄与した測定点数が最大の分割領域に含まれる重心、又はその重心に最近接の重心を選択するようにしてもよい。
【0247】
このようにすることで、測定点群の集中と広がりとを考慮した重心、すなわち、物体形状における幾何的中心を反映した重心を選択できる。
【0248】
また、図12のフローに示す物理的中心として選択した重心と、変形例2のような幾何的な中心として選択した重心とを両方算出し、両者が一致するかどうかを吟味することで、選択された重心の確からしさを判断することもできる。
【0249】
以上のように、本実施の形態に係るレーダシステム100は、重心決定部107の出力である重心出力117と、イメージング結果であるマイクロドップラー出力115による取得イメージとを表示画面上に表示することができる。これによって、目標物体の形状イメージとその目標物体の位置とを同時に、又は必要に応じてどちらか一方をモニタすることができる。
【0250】
これにより、レーダシステム100は、目標物体の形状イメージが不鮮明であっても、少なくとも物体の個数、位置、及び速度などのマクロな情報に関しては、分離して表示することができる。これは、形状を解釈する際の重要な情報となる。
【0251】
以上、本発明の実施の形態1に係るレーダシステム100は、ドップラー速度の干渉により偽像が発生する状況であっても、アンテナ数を増やすことなく、複数物体個々についてマクロな情報を推定できる。このように、レーダシステム100は、物体の位置の検出精度を向上できる。
【0252】
(実施の形態2)
図17は、実施の形態2に係るレーダシステム200の構成を示すブロック図である。図17に示すレーダシステム200は、実施の形態1で説明したレーダシステム100の構成に加え、追尾予測部208を備える。また、重心決定部207が、追尾予測部208の出力である予測出力218を用いる点が異なる。また、実施の形態2に係るレーダシステム200は、実施の形態1のように目標物体の数が3以上の場合にも適用できる。
【0253】
なお、実施の形態1と共通部分に関しては実施の形態1と同じ符号を付して説明を省略する。
【0254】
<追尾予測部208>
追尾予測部208は、重心決定部207から出力された重心出力217が入力される。重心決定部207の説明は後述するが、出力される重心出力217は実施の形態1と同様である。
【0255】
追尾予測部208は、重心決定部207により決定された、過去の目標物体の位置を用いて、未来の目標物体の位置である予測位置を予測する。具体的には、追尾予測部208は、測定データとして重心出力217を時系列で逐次取得する。また、追尾予測部208は、次のステップ(未来)の重心位置を推定(予測という)することのできる予測フィルタを含んでいる。そのような予測フィルタにはカルマンフィルタがある。このような予測フィルタによる、過去から現在に至る推定値は、測定結果が都度反映され、修正しながら漸化的に定まるため、目標物体の追尾(トラッキング)に利用されている。
【0256】
さらに、追尾予測部208では、レーダシステム100により検知される目標物体の個数を予測する。具体的には、予測フィルタによって、検知外領域(検知性能又は物理的遮蔽によってシステムで検知できない領域)への目標物体の出入りがあるか(すなわち物体数の増減があるか)、又は、複数物体の同一距離レンジへの進入があるか(すなわち偽像の発生があるか)を予測できる。そこで、追尾予測部208は、個数変動の予測を使って物体個数を修正し、目標物体の個数を予め決定する。
【0257】
具体的には、追尾予測部208は、過去において物体の個数が2であり、予測フィルタによって、現在又は次ステップで偽像が生じていると判明すれば、個数の判定は2にする。これにより、偽像の影響で重心の候補(第2重心116b)が3つ以上出力されたとしても、そのうち2つを選択すればよいことが明確となる。
【0258】
このように、予測出力218は、目標物体の個数Nと、それぞれの予測値(Xpi,Ypi,Zpi)又は(Rpi,Api,Epi)の情報(ただし、i=1,2,・・・N)と、偽像判定情報FIとを含む。例えば、N=2のとき、(Xp1,Yp1,Zp1)、及び(Xp2,Yp2,Zp2)の2組のデータが出力される。
【0259】
また、偽像判定情報FIとは、(Xp1,Yp1,Zp1)、及び(Xp2,Yp2,Zp2)のレンジ番号をそれぞれRp1、Rp2とすると、例えば、Rp1=Rp2のとき、FI=1(偽像確定)であり、Rp1≠Rp2のとき、FI=0(偽像なし)である。
【0260】
または、さらに多段階に判定し、|Rp1−Rp2|=0のとき、FI=2(偽像確定)であり、|Rp1−Rp2|=1のとき、FI=1(偽像予備段階)であり、それ以外のとき、FI=0(偽像なし)であってもよい。
【0261】
なお、予測出力218は距離レンジごとに区切って処理されることが好ましい。そうすることにより、問題となる距離レンジを区別して扱えるため、偽像の有無に応じた適切な重心決定を行うことができるようになる。
【0262】
<重心決定部207>
重心決定部207には、第1重心116a、第2重心116b及び予測出力218が入力される。重心決定部207は、実施の形態1の場合とは異なり、予測出力218で示される目標物体の個数及び位置に基づいて重心を決定する。具体的には、重心決定部207は、複数の第2重心116bのうち、追尾予測部208で予測された数の第2重心116bを目標物体の位置に決定する。
【0263】
図18は、重心決定処理のフローチャートである。また、図19及び図20は、重心決定部207における重心の選択方法を説明するための図である。
【0264】
以下では、同一距離レンジの情報のみ取り出し、当該情報が1次元の空間に丸められているものとして説明する。横軸はA値(方位角)又はX値(X位置)とする。
【0265】
まず、予測出力218で示される物体個数はN=2であるとする。予測出力218で示される予測位置と第1重心116aとの位置関係に応じて、重心の選択方法が異なっている。
【0266】
まず、重心決定部207は、予測出力218において、偽像の発生が示されているか否かを判定する(S301)。具体的には、重心決定部207は、上記のF=1又は2の場合、偽像の発生があると判定し(S301でYes)、F=0の場合、偽像の発生がないと判定する(S301でNo)。
【0267】
偽像の発生がある場合(S301でYes)、重心決定部207は、2つの予測位置の間に第1重心116aが存在するか否かを判定する(S302)。言い換えると、重心決定部207は、第1重心116aの左右の両方に予測重心が存在するか否かを判定する。
【0268】
図19に示すように、2つの予測位置の間に第1重心116a(第1重心B)が存在する場合(S302でYes)、重心決定部207は、第2重心116bの中から各予測位置に最も近い点を選択する(S303)。具体的には、予測出力218で示される予測位置がN点の場合、重心決定部207は、複数の第2重心116bのうちのN点の各々と、N点の予測位置の各々との距離(又は距離の2乗)の和を算出する。そして、重心決定部207は、算出した和が最小となる組合せに含まれる第2重心116bを選択する。
【0269】
図19の例では、重心決定部207は、以下の6通りの距離dを計算し、最小距離の組合せを選択する。
【0270】
d12=(Xg1−Xp1)2+(Xg2−Xp2)2
d13=(Xg1−Xp1)2+(Xg3−Xp2)2
d21=(Xg2−Xp1)2+(Xg1−Xp2)2
d23=(Xg2−Xp1)2+(Xg3−Xp2)2
d31=(Xg3−Xp1)2+(Xg1−Xp2)2
d32=(Xg3−Xp1)2+(Xg2−Xp2)2
【0271】
例えば、d12が最小距離であれば、重心決定部207は、重心出力217として第2重心Xg1及びXg2を選択する。
【0272】
また、追尾予測部208では、追尾を実行するために、目標物体にラベリングして(識別番号を付けて)管理している。例えば、物体1に対する予測位置がXp1であり、物体2に対する予測位置がXp2である。したがって、重心出力217において、重心Xg1は物体1に対応付けられており、重心Xg2は物体2に対応付けられている。
【0273】
なお、ここでは位置の次元を1次元に落として説明したが、2次元及び3次元での評価が必要であれば、容易に拡張できる。
【0274】
また、位置の情報のみならず、ドップラー周波数F(Fg,Fp)も含めた最小距離を吟味することにより、動きの類似度を含めた評価が可能になるため、より好ましい。
【0275】
例えば、i,jを指標、wを重み付け(物理次元の統一を含む)としたとき、下記(式10)を用いて距離dを算出すればよい。
【0276】
d=Σi,j{(Xgi−Xpj)2+w×(Fgi−Fpj)2} ・・・(式10)
【0277】
図20は、予測位置の間に第1重心116aがない場合を示す図である。2つの予測位置の間に第1重心116aが存在しない場合(S302でNo)、重心決定部207は、予測出力218を判定に用いず、図12に示す実施の形態1の決定フローにより重心を選択する(S304)。
【0278】
また、予測出力218において偽像の発生がないことが示される場合(S301でNo)、図21に示すように第2重心算出部106bで算出された複数の第2重心Bをそのまま目標物体の位置として選択する(S305)。また、この場合、第1重心算出部106aは、第1重心116aを算出しなくてもよい。
【0279】
なお、ここでは、物体が2個の場合を説明したが、予測出力218により3個以上の物体が予測されている場合にも同様の処理を行うことができる。
【0280】
(実施の形態2の変形例1)
また、重心決定部207は、上述した処理の代わりに、以下に示す処理を行なってもよい。
【0281】
図22は、実施の形態2の変形例1に係る重心決定処理のフローチャートである。また、予測出力218において、物体個数が3以上(N≧3)のときの概略をN=3を例に図23に示す。N≧3のとき、重心決定部207では、次のフローにより重心を決定する。また、距離レンジごとに以下の処理が行われる。
【0282】
まず、重心決定部207は、第1重心116aを基準として、第2重心を左右のグループ(第1グループ及び第2グループ)に分割する(S321)。
【0283】
また、重心決定部207は、第1重心116aを基準として、予測候補を左右のグループ(第3グループ及び第4グループ)に分割する(S322)。
【0284】
次に、重心決定部207は、左右の両方のグループに予測位置が含まれているか否かを判定する(S323)。
【0285】
予測位置が左右の両方のグループに含まれている場合(S323でYes)、重心決定部207は、グループごとに各予測位置に最も近い第2重心の組み合わせを、目標物体の位置として選択する(S324)。つまり、重心決定部207は、左グループに含まれる複数の第2重心のうち、左グループに含まれる各予測位置に最も近い第2重心と、右グループに含まれる複数の第2重心のうち、右グループに含まれる各予測位置に最も近い第2重心と、を目標物体の位置に決定する。具体的には、左グループに含まれる予測位置がN点の場合、重心決定部207は、左グループに含まれる複数の第2重心116bのうちのN点の各々と、N点の予測位置の各々との距離(又は距離の2乗)の和を算出する。そして、重心決定部207は、算出した和が最小となる組合せで重心を選択する。なお、右グループに対する処理も同様である。
【0286】
図23に示す例では、第2重心Xg1、Xg2及びXg3が左グループに含まれ、第2重心Xg4及びXg5が右グループに含まれる。また、予測位置Xp1及びXp2が左グループに含まれ、予測位置Xp3が右グループに含まれる。よって、重心決定部207は、左グループに含まれる3つの第2重心と2つの予測位置との組み合わせである6パターンについて、各第2重心と各予測位置との距離(又は距離の2乗)の和を算出する。ここでは、6つ組み合わせのうち、Xg1とXp1とのペアと、Xg2とXp1とのペアとを含む組み合わせの上記和が最も小さくなる。よって、重心決定部207は、予測位置Xp1に対応する第2重心としてXp1を選択し、予測位置Xp2に対応する第2重心としてXp2を選択する。
【0287】
また、重心決定部207は、右グループに含まれる予測位置Xp3に対応する第2重心として、右グループに含まれる第2重心Xg4及びXg5のうち、当該予測位置Xp3に最も近い第2重心Xg4を選択する。
【0288】
一方、予測位置が左右のグループの一方にのみに含まれている場合(S323でYes)、重心決定部207は、予測位置が含まれないグループから1点、予測位置が含まれるグループからN−1点の第2重心を選択する(S325)。例えば、予測位置が左グループのみに含まれている場合、重心決定部207は、左グループに含まれるN個の予測位置のうち、N−1を選択する。例えば、重心決定部207は、左グループに含まれるN点の予測位置のうち、第1重心Bに最も近い予測位置を除くN−1点の予測位置を選択する。そして、重心決定部207は、選択したN−1点の予測位置に対して、距離の和が最小となるN−1点の第2重心を選択する。また、重心決定部207は、右グループに含まれる第2重心のうち、第1重心116aに最も近い第2重心を選択する。
【0289】
このように、第1重心116aを基準にすることで、予測位置と第2重心116bとのペアリングの組合せ数を減らすこととができる。さらに、ドップラー速度の干渉によって偽像が発生しても、可能な限り有効なデータを抽出できるようになる。このように、当該レーダシステム200は、より安定な追尾を実現できる。
【0290】
以上、本発明の実施の形態2に係るレーダシステム200は、ドップラー速度の干渉による偽像がある状況であっても、アンテナ数を増やすことなく、測定点の中から目標物体個々のマクロな情報を推定及び分離できる。これにより、レーダシステム200は、安定なトラッキングを実現できる。
【0291】
以上、本発明の実施の形態に係るレーダシステムについて説明したが、本発明は、この実施の形態に限定されるものではない。
【0292】
また、上記実施の形態に係るレーダシステムに含まれる処理部の一部又は全ては集積回路であるLSIとして実現してもよい。これらは個別に1チップ化されてもよいし、一部又は全てを含むように1チップ化されてもよい。
【0293】
また、集積回路化はLSIに限るものではなく、専用回路又は汎用プロセッサで実現してもよい。LSI製造後にプログラムすることが可能なFPGA(Field Programmable Gate Array)、又はLSI内部の回路セルの接続や設定を再構成可能なリコンフィギュラブル・プロセッサを利用してもよい。
【0294】
また、本発明の実施の形態に係る、レーダシステムの機能の一部又は全てを、CPU等のプロセッサがプログラムを実行することにより実現してもよい。
【0295】
さらに、本発明は上記プログラムであってもよいし、上記プログラムが記録された非一時的なコンピュータ読み取り可能な記録媒体であってもよい。また、上記プログラムは、インターネット等の伝送媒体を介して流通させることができるのは言うまでもない。
【0296】
また、上記実施の形態1〜2に係る、レーダシステム、及びそれらの変形例の機能のうち少なくとも一部を組み合わせてもよい。
【0297】
また、上記で用いた数字は、全て本発明を具体的に説明するために例示するものであり、本発明は例示された数字に制限されない。
【0298】
また、ブロック図における機能ブロックの分割は一例であり、複数の機能ブロックを一つの機能ブロックとして実現したり、一つの機能ブロックを複数に分割したり、一部の機能を他の機能ブロックに移してもよい。また、類似する機能を有する複数の機能ブロックの機能を単一のハードウェア又はソフトウェアが並列又は時分割に処理してもよい。
【0299】
また、上記のステップが実行される順序は、本発明を具体的に説明するために例示するためのものであり、上記以外の順序であってもよい。また、上記ステップの一部が、他のステップと同時(並列)に実行されてもよい。
【0300】
更に、本発明の主旨を逸脱しない限り、本実施の形態に対して当業者が思いつく範囲内の変更を施した各種変形例も本発明に含まれる。
【産業上の利用可能性】
【0301】
本発明は、ドップラーレーダシステムに適用できる。また、本発明は、このようなドップラーレーダシステムを用いる防犯システム又は衝突回避システムに有用である。
【符号の説明】
【0302】
100、200 レーダシステム
101a 送信部
101b 受信部
102 距離算出部
103 ドップラー解析部
104 方向算出部
105 マイクロドップラー演算部
106 重心算出部
106a 第1重心算出部
106b 第2重心算出部
107、207 重心決定部
120 送信アンテナ
121、121a、121b、121c 受信アンテナ
111 受信信号
112 レンジ出力
113 ドップラー出力
114 方向出力
115 マイクロドップラー出力
116a 第1重心
116b 第2重心
117、217 重心出力
131、132 測定点
150、150a、150b 目標物体
161a、161b、162a、162b 反射点
208 追尾予測部
218 予測出力
901 レーダ装置
910 送信器
911 送信アンテナ
912、913 受信アンテナ
920、930 受信器
931、932、933 被測定物
【特許請求の範囲】
【請求項1】
目標物体の位置を検知するドップラーレーダシステムであって、
送信信号を生成する送信部と、
前記送信信号を送信波として放射する送信アンテナと、
前記送信波が、前記目標物体に含まれる複数の反射点で反射された反射波を各々が受信する複数の受信アンテナと、
前記複数の受信アンテナで受信された複数の反射波の各々に対応する複数の受信信号を生成する受信部と、
前記複数の受信信号間の位相差を用いて、前記ドップラーレーダシステムに対する前記複数の反射点の各々の方向を算出する方向算出部と、
前記送信信号と前記受信信号との遅延量を用いて、前記ドップラーレーダシステムと前記複数の反射点との各々の距離を算出する距離算出部と、
前記複数の反射点の各々の方向と距離とを用いて、前記複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部と、
第1間隔を有する第1分割枠を用いて、前記複数の測定点うち、前記第1分割枠で分割された各第1分割領域に含まれる測定点の第1重心を算出する第1重心算出部と、
前記第1間隔より狭い第2間隔を有する第2分割枠を用いて、前記複数の測定点のうち、前記第2分割枠で分割された各第2分割領域に含まれる測定点の第2重心を算出する第2重心算出部と、
複数の前記第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定する重心決定部とを備える
ドップラーレーダシステム。
【請求項2】
前記第2間隔は、前記目標物体の幅の略2倍であり、
前記第1間隔は、前記第2間隔の2倍以上である
請求項1記載のドップラーレーダシステム。
【請求項3】
前記第1分割枠は、第3分割枠と、前記第3分割枠と異なる第4分割枠とを含み、
前記第2分割枠は、第5分割枠と、前記第5分割枠と異なる第6分割枠とを含み、
前記第1重心算出部は、
前記複数の測定点のうち、前記第3分割枠で分割された各第3分割領域に含まれる測定点の第3重心を算出し、
複数の前記第3重心のうち、前記第4分割枠で分割された各第4分割領域に含まれる第3重心の重心を前記第1重心として算出し、
前記第2重心算出部は、
前記複数の測定点のうち、前記第5分割枠で分割された各第5分割領域に含まれる測定点の第5重心を算出し、
複数の前記第5重心のうち、前記第6分割枠で分割された各第6分割領域に含まれる第5重心の重心を前記第2重心として算出する
請求項1又は2記載のドップラーレーダシステム。
【請求項4】
前記重心決定部は、
前記第1重心の位置を基準に、前記複数の第2重心を第1グループと第2グループとに分割し、
前記第1及び第2グループから、少なくとも1点ずつ第2重心を選択し、
選択した前記第2重心を前記目標物体の位置に決定する
請求項1〜3のいずれか1項に記載のドップラーレーダシステム。
【請求項5】
前記重心決定部は、
前記第1グループに含まれる第2重心と前記第2グループに含まれる第2重心とで構成されるペアごとに、当該ペアに含まれる2点の第2重心の重心であるペア重心を算出し、
算出した複数のペア重心のうち、前記第1重心に最も近い前記ペア重心のペアを選択し、
選択したペアに含まれる2点の第2重心を2つの前記目標物体の位置に決定する
請求項4記載のドップラーレーダシステム。
【請求項6】
前記ドップラーレーダシステムは、さらに、
前記重心決定部により決定された、過去の前記目標物体の位置を用いて、未来の前記目標物体の位置である予測位置を予測する追尾予測部を備え、
前記追尾予測部は、前記ドップラーレーダシステムにより検知される目標物体の数を予測し、
前記重心決定部は、前記複数の第2重心のうち、前記追尾予測部で予測された数の第2重心を前記目標物体の位置に決定する
請求項1〜3のいずれか1項に記載のドップラーレーダシステム。
【請求項7】
前記重心決定部は、
前記追尾予測部により予測された複数の前記予測位置の間に前記第1重心が存在する場合、前記複数の第2重心のうち、各前記予測位置に最も近い第2重心を前記目標物体の位置に決定し、
前記追尾予測部により予測された複数の前記予測位置の間に前記第1重心が存在しない場合、前記複数の第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定する
請求項6記載のドップラーレーダシステム。
【請求項8】
前記重心決定部は、
前記第1重心の位置を基準に、前記複数の第2重心を第1グループと第2グループとに分割し、
前記第1重心の位置を基準に、複数の前記予測位置を第3グループと第4グループとに分割し、
前記第1グループに含まれる複数の第2重心のうち、前記第3グループに含まれる各予測位置に最も近い第2重心と、前記第2グループに含まれる複数の第2重心のうち、前記第4グループに含まれる各予測位置に最も近い第2重心と、を前記目標物体の位置に決定する
請求項6記載のドップラーレーダシステム。
【請求項9】
前記重心決定部は、
前記第3グループ及び前記第4グループの両方に予測位置が含まれる場合、前記第1グループに含まれる複数の第2重心のうち、前記第3グループに含まれる各予測位置に最も近い第2重心と、前記第2グループに含まれる複数の第2重心のうち、前記第4グループに含まれる各予測位置に最も近い第2重心と、を前記目標物体の位置に決定し、
前記第3グループにN(Nは3以上の整数)点の予測位置が含まれ、かつ前記第4グループに予測位置が含まれない場合、前記第1グループに含まれるN−1点の第2重心と、前記第2グループに含まれる1点の第2重心と、を前記目物体の位置に決定する
請求項8記載のドップラーレーダシステム。
【請求項10】
前記重心決定部は、
同一の距離レンジに複数の予測位置が含まれる場合、前記複数の第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定し、
同一の距離レンジに一つの予測位置のみが含まれる場合、前記第2重心を前記目標物体の位置に決定する
請求項6記載のドップラーレーダシステム。
【請求項11】
ドップラーレーダシステムを用いて目標物体の位置を検知する物体検知方法であって、
送信信号を生成するステップと、
送信アンテナにより、前記送信信号を送信波として放射するステップと、
前記送信波が、前記目標物体に含まれる複数の反射点で反射された反射波を、複数の受信アンテナの各々で受信するステップと、
前記複数の受信アンテナで受信された複数の反射波の各々に対応する複数の受信信号を生成するステップと、
前記複数の受信信号間の位相差を用いて、前記ドップラーレーダシステムに対する前記複数の反射点の各々の方向を算出するステップと、
前記送信信号と前記受信信号との遅延量を用いて、前記ドップラーレーダシステムと前記複数の反射点との各々の距離を算出するステップと、
前記複数の反射点の各々の方向と距離とを用いて、前記複数の反射点の各々の位置を示す複数の測定点を算出するステップと、
第1間隔を有する第1分割枠を用いて、前記複数の測定点うち、前記第1分割枠で分割された各第1分割領域に含まれる測定点の第1重心を算出するステップと、
前記第1間隔より狭い第2間隔を有する第2分割枠を用いて、前記複数の測定点のうち、前記第2分割枠で分割された各第2分割領域に含まれる測定点の第2重心を算出するステップと、
複数の前記第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定するステップとを含む
物体検知方法。
【請求項1】
目標物体の位置を検知するドップラーレーダシステムであって、
送信信号を生成する送信部と、
前記送信信号を送信波として放射する送信アンテナと、
前記送信波が、前記目標物体に含まれる複数の反射点で反射された反射波を各々が受信する複数の受信アンテナと、
前記複数の受信アンテナで受信された複数の反射波の各々に対応する複数の受信信号を生成する受信部と、
前記複数の受信信号間の位相差を用いて、前記ドップラーレーダシステムに対する前記複数の反射点の各々の方向を算出する方向算出部と、
前記送信信号と前記受信信号との遅延量を用いて、前記ドップラーレーダシステムと前記複数の反射点との各々の距離を算出する距離算出部と、
前記複数の反射点の各々の方向と距離とを用いて、前記複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部と、
第1間隔を有する第1分割枠を用いて、前記複数の測定点うち、前記第1分割枠で分割された各第1分割領域に含まれる測定点の第1重心を算出する第1重心算出部と、
前記第1間隔より狭い第2間隔を有する第2分割枠を用いて、前記複数の測定点のうち、前記第2分割枠で分割された各第2分割領域に含まれる測定点の第2重心を算出する第2重心算出部と、
複数の前記第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定する重心決定部とを備える
ドップラーレーダシステム。
【請求項2】
前記第2間隔は、前記目標物体の幅の略2倍であり、
前記第1間隔は、前記第2間隔の2倍以上である
請求項1記載のドップラーレーダシステム。
【請求項3】
前記第1分割枠は、第3分割枠と、前記第3分割枠と異なる第4分割枠とを含み、
前記第2分割枠は、第5分割枠と、前記第5分割枠と異なる第6分割枠とを含み、
前記第1重心算出部は、
前記複数の測定点のうち、前記第3分割枠で分割された各第3分割領域に含まれる測定点の第3重心を算出し、
複数の前記第3重心のうち、前記第4分割枠で分割された各第4分割領域に含まれる第3重心の重心を前記第1重心として算出し、
前記第2重心算出部は、
前記複数の測定点のうち、前記第5分割枠で分割された各第5分割領域に含まれる測定点の第5重心を算出し、
複数の前記第5重心のうち、前記第6分割枠で分割された各第6分割領域に含まれる第5重心の重心を前記第2重心として算出する
請求項1又は2記載のドップラーレーダシステム。
【請求項4】
前記重心決定部は、
前記第1重心の位置を基準に、前記複数の第2重心を第1グループと第2グループとに分割し、
前記第1及び第2グループから、少なくとも1点ずつ第2重心を選択し、
選択した前記第2重心を前記目標物体の位置に決定する
請求項1〜3のいずれか1項に記載のドップラーレーダシステム。
【請求項5】
前記重心決定部は、
前記第1グループに含まれる第2重心と前記第2グループに含まれる第2重心とで構成されるペアごとに、当該ペアに含まれる2点の第2重心の重心であるペア重心を算出し、
算出した複数のペア重心のうち、前記第1重心に最も近い前記ペア重心のペアを選択し、
選択したペアに含まれる2点の第2重心を2つの前記目標物体の位置に決定する
請求項4記載のドップラーレーダシステム。
【請求項6】
前記ドップラーレーダシステムは、さらに、
前記重心決定部により決定された、過去の前記目標物体の位置を用いて、未来の前記目標物体の位置である予測位置を予測する追尾予測部を備え、
前記追尾予測部は、前記ドップラーレーダシステムにより検知される目標物体の数を予測し、
前記重心決定部は、前記複数の第2重心のうち、前記追尾予測部で予測された数の第2重心を前記目標物体の位置に決定する
請求項1〜3のいずれか1項に記載のドップラーレーダシステム。
【請求項7】
前記重心決定部は、
前記追尾予測部により予測された複数の前記予測位置の間に前記第1重心が存在する場合、前記複数の第2重心のうち、各前記予測位置に最も近い第2重心を前記目標物体の位置に決定し、
前記追尾予測部により予測された複数の前記予測位置の間に前記第1重心が存在しない場合、前記複数の第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定する
請求項6記載のドップラーレーダシステム。
【請求項8】
前記重心決定部は、
前記第1重心の位置を基準に、前記複数の第2重心を第1グループと第2グループとに分割し、
前記第1重心の位置を基準に、複数の前記予測位置を第3グループと第4グループとに分割し、
前記第1グループに含まれる複数の第2重心のうち、前記第3グループに含まれる各予測位置に最も近い第2重心と、前記第2グループに含まれる複数の第2重心のうち、前記第4グループに含まれる各予測位置に最も近い第2重心と、を前記目標物体の位置に決定する
請求項6記載のドップラーレーダシステム。
【請求項9】
前記重心決定部は、
前記第3グループ及び前記第4グループの両方に予測位置が含まれる場合、前記第1グループに含まれる複数の第2重心のうち、前記第3グループに含まれる各予測位置に最も近い第2重心と、前記第2グループに含まれる複数の第2重心のうち、前記第4グループに含まれる各予測位置に最も近い第2重心と、を前記目標物体の位置に決定し、
前記第3グループにN(Nは3以上の整数)点の予測位置が含まれ、かつ前記第4グループに予測位置が含まれない場合、前記第1グループに含まれるN−1点の第2重心と、前記第2グループに含まれる1点の第2重心と、を前記目物体の位置に決定する
請求項8記載のドップラーレーダシステム。
【請求項10】
前記重心決定部は、
同一の距離レンジに複数の予測位置が含まれる場合、前記複数の第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定し、
同一の距離レンジに一つの予測位置のみが含まれる場合、前記第2重心を前記目標物体の位置に決定する
請求項6記載のドップラーレーダシステム。
【請求項11】
ドップラーレーダシステムを用いて目標物体の位置を検知する物体検知方法であって、
送信信号を生成するステップと、
送信アンテナにより、前記送信信号を送信波として放射するステップと、
前記送信波が、前記目標物体に含まれる複数の反射点で反射された反射波を、複数の受信アンテナの各々で受信するステップと、
前記複数の受信アンテナで受信された複数の反射波の各々に対応する複数の受信信号を生成するステップと、
前記複数の受信信号間の位相差を用いて、前記ドップラーレーダシステムに対する前記複数の反射点の各々の方向を算出するステップと、
前記送信信号と前記受信信号との遅延量を用いて、前記ドップラーレーダシステムと前記複数の反射点との各々の距離を算出するステップと、
前記複数の反射点の各々の方向と距離とを用いて、前記複数の反射点の各々の位置を示す複数の測定点を算出するステップと、
第1間隔を有する第1分割枠を用いて、前記複数の測定点うち、前記第1分割枠で分割された各第1分割領域に含まれる測定点の第1重心を算出するステップと、
前記第1間隔より狭い第2間隔を有する第2分割枠を用いて、前記複数の測定点のうち、前記第2分割枠で分割された各第2分割領域に含まれる測定点の第2重心を算出するステップと、
複数の前記第2重心の中から、前記第2重心と前記第1重心との位置関係に基づいて、少なくとも1つの第2重心を前記目標物体の位置に決定するステップとを含む
物体検知方法。
【図1】

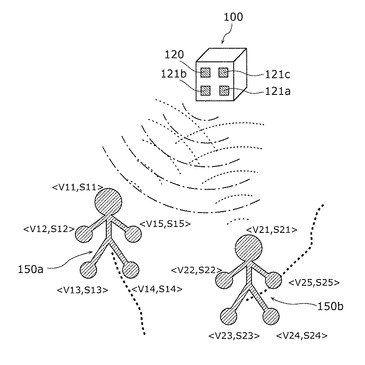
【図3】
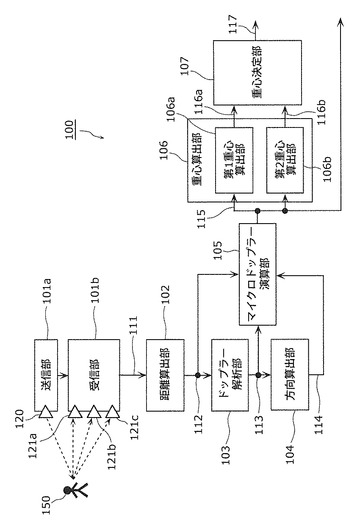
【図4】
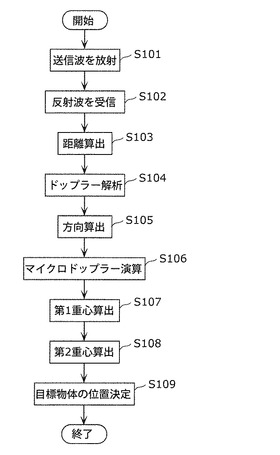
【図5A】
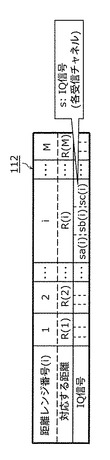
【図5B】

【図5C】
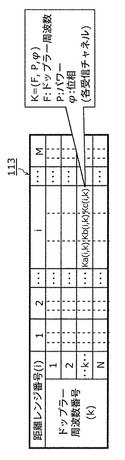
【図6】
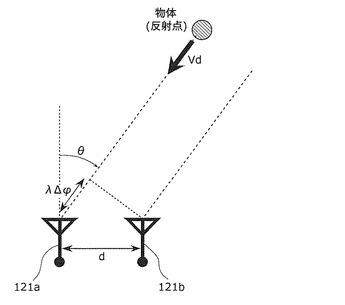
【図7A】
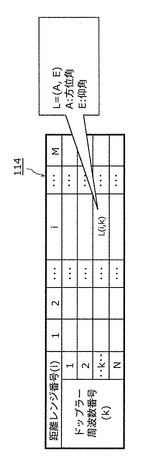
【図7B】
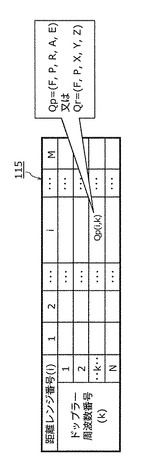
【図8A】
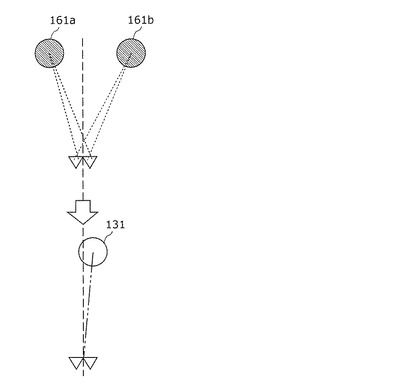
【図8B】
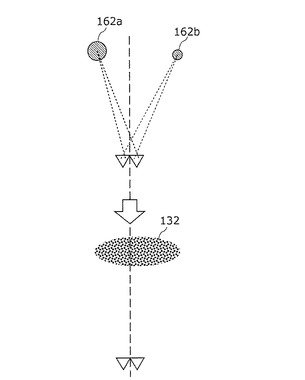
【図9A】
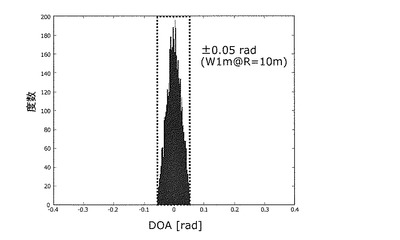
【図9B】
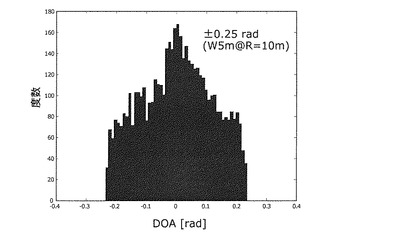
【図10】
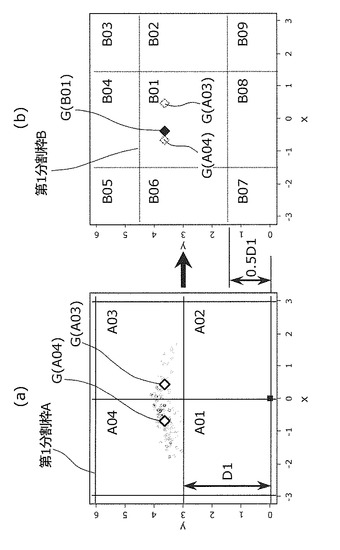
【図11】
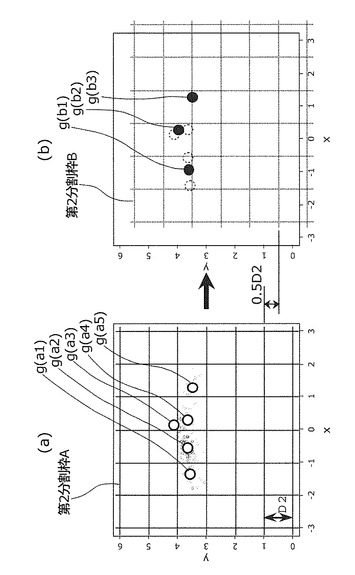
【図12】
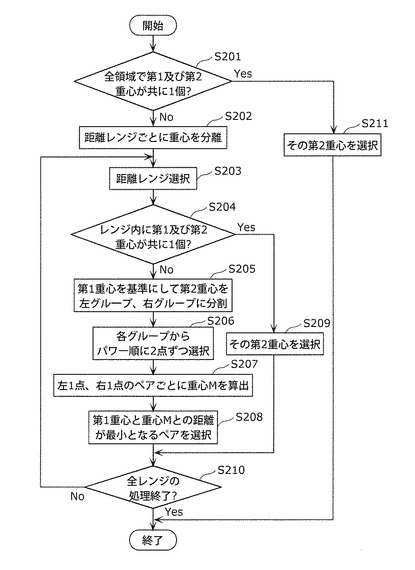
【図13A】
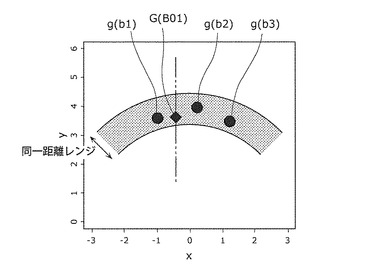
【図13B】
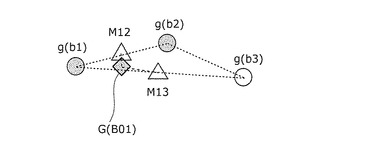
【図14A】
【図14B】
【図14C】
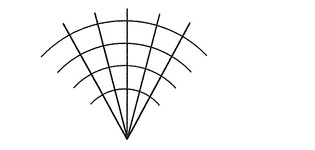
【図14D】
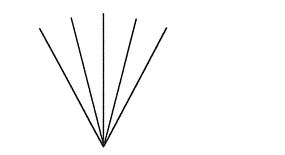
【図15A】
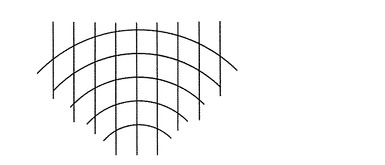
【図15B】
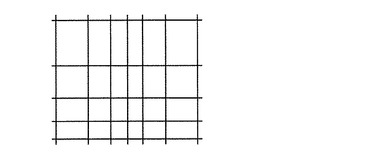
【図15C】
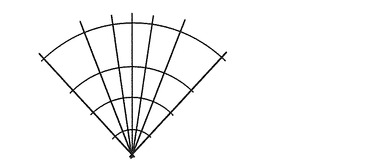
【図16A】
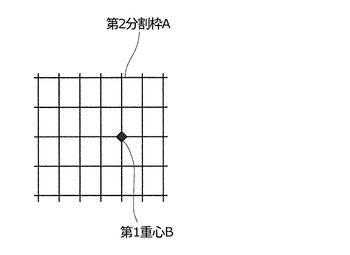
【図16B】
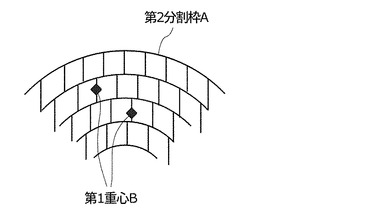
【図17】
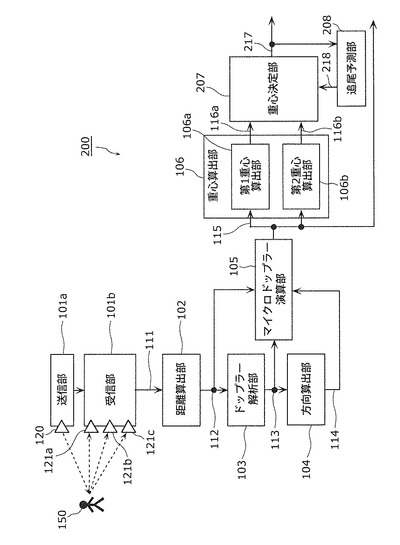
【図18】
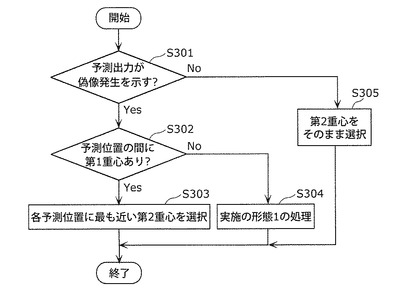
【図19】
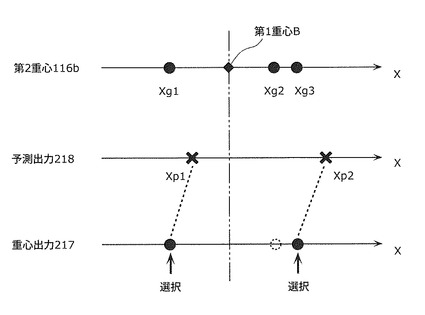
【図20】
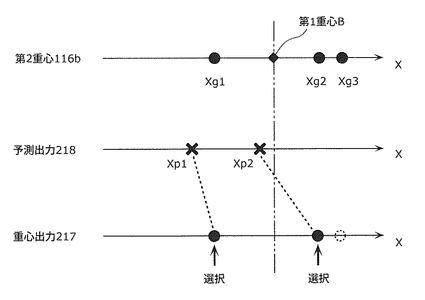
【図22】
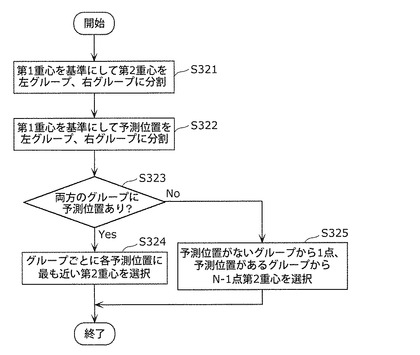
【図23】
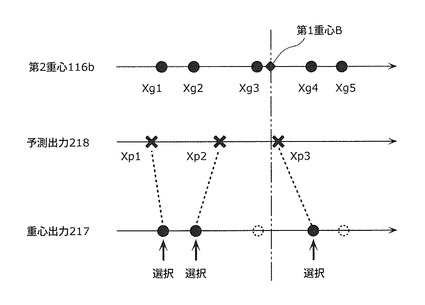
【図24】
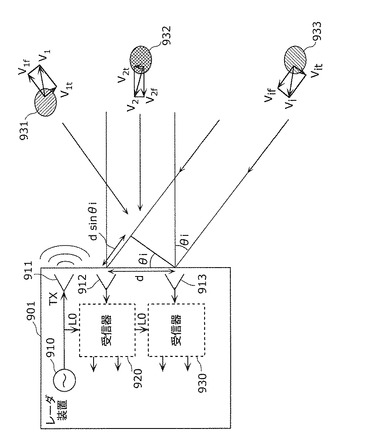
【図25】
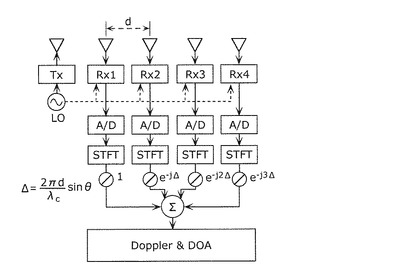
【図2A】
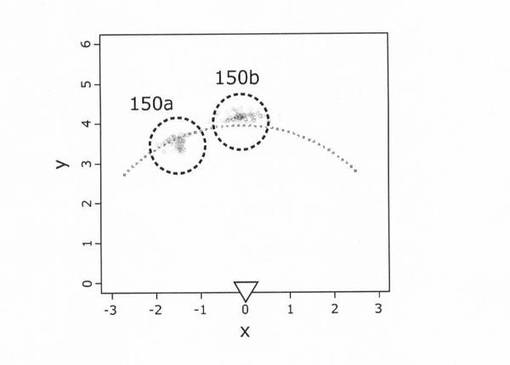
【図2B】
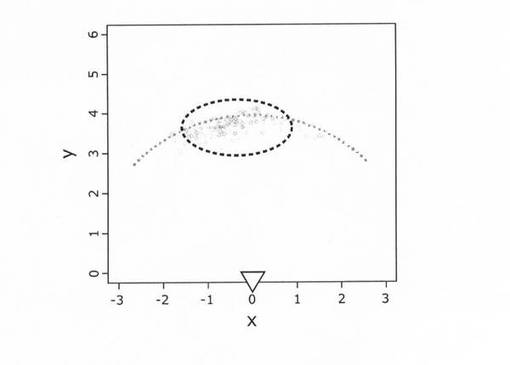
【図21】
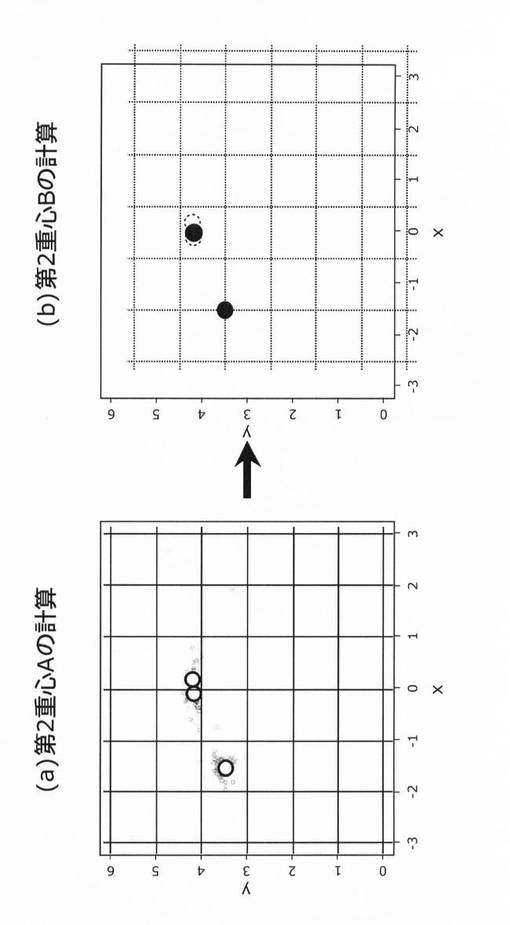
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図6】
【図7A】
【図7B】
【図8A】
【図8B】
【図9A】
【図9B】
【図10】
【図11】
【図12】
【図13A】
【図13B】
【図14A】
【図14B】
【図14C】
【図14D】
【図15A】
【図15B】
【図15C】
【図16A】
【図16B】
【図17】
【図18】
【図19】
【図20】
【図22】
【図23】
【図24】
【図25】
【図2A】
【図2B】
【図21】
【公開番号】特開2013−96828(P2013−96828A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239617(P2011−239617)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]