
ナビゲーション装置及びナビゲーション方法
【課題】 特殊車両の接近時に自車の走行レーンに対応した適切な回避動作を案内するナビゲーション装置を提供する。
【解決手段】 自車の走行レーンを検出する自車走行レーン検出手段と、特殊車両の前記自車に対する位置を検出する特殊車両検出手段と、前記自車の前記走行レーンと前記特殊車両の前記位置とに対応する回避案内を判定する回避案内判定手段と、前記回避案内を出力する案内手段と、を備えることを特徴とするナビゲーション装置。
【解決手段】 自車の走行レーンを検出する自車走行レーン検出手段と、特殊車両の前記自車に対する位置を検出する特殊車両検出手段と、前記自車の前記走行レーンと前記特殊車両の前記位置とに対応する回避案内を判定する回避案内判定手段と、前記回避案内を出力する案内手段と、を備えることを特徴とするナビゲーション装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はナビゲーション装置及びナビゲーション方法に関し、特に特殊車両の回避動作案内に関する。
【背景技術】
【0002】
従来、自車に緊急車両等の特殊車両が接近すると特殊車両の接近を案内したり、待避地点を案内するナビゲーション装置が知られている(例えば特許文献1、2参照)。
しかし、特許文献1、2に記載されたナビゲーション装置によると、自車又は特殊車両の走行レーンに対応した回避動作を案内しないため、特殊車両の接近に伴う案内が不適切になる場合がある。
【0003】
【特許文献1】特開平10−86761号公報
【特許文献2】特開平11ー48886号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は上述の問題に鑑みて創作されたものであって、特殊車両の接近時に自車又は特殊車両の走行レーンに対応した適切な回避動作を案内するナビゲーション装置及びナビゲーション方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
(1)上記目的を達成するためのナビゲーション装置は、自車の走行レーンを検出する自車走行レーン検出手段と、特殊車両の前記自車に対する位置を検出する特殊車両検出手段と、前記自車の前記走行レーンと前記特殊車両の前記位置とに対応する回避案内を判定する回避案内判定手段と、前記回避案内を出力する案内手段と、を備える。
ナビゲーション装置は、自車の走行レーンと特殊車両の自車に対する位置とを検出し、それらに対応する回避案内を判定することにより、特殊車両の接近時に自車の走行レーンに対応した適切な回避動作を案内することができる。
【0006】
(2)前記特殊車両検出手段は、前記特殊車両の走行レーンを検出してもよい。前記回避案内判定手段は、前記特殊車両の前記走行レーンに対応する前記回避案内を判定してもよい。
ナビゲーション装置は、特殊車両の走行レーンを検出し、特殊車両の走行レーンに対応する回避案内を判定することにより、特殊車両の接近時に自車と特殊車両の走行レーンに対応したより適切な回避動作を案内することができる。
【0007】
(3)前記ナビゲーション装置は、前記自車の道路網上の位置を検出する自車位置検出手段と、前記自車の目的地を設定する目的地設定手段と、前記自車の前記位置と前記自車の目的地とに対応する推奨経路を判定する経路判定手段とをさらに備えてもよい。前記回避案内判定手段は、前記推奨経路に対応する前記回避案内を判定してもよい。
ナビゲーション装置は、自車の道路網上の位置と目的地とに対応する推奨経路を判定し、推奨経路に対応する回避案内を判定することにより、交差点接近時に特殊車両が接近しても、自車の走行レーンに対応した適切な回避動作を案内することができる。
【0008】
(4)上記目的を達成するためのナビゲーション装置は、自車の道路網上の位置を検出する自車位置検出手段と、前記自車の目的地を設定する目的地設定手段と、前記自車の前記位置と前記自車の目的地とに対応する推奨経路を探索する経路探索手段と、特殊車両の道路網上の位置及び走行レーンを検出する特殊車両検出手段と、前記推奨経路と前記特殊車両の前記位置と前記走行レーンとに対応する前記自車の回避案内を判定する回避案内判定手段と、前記回避案内を出力する案内手段と、を備える。
ナビゲーション装置は、特殊車両の道路網上の位置と走行レーンとを検出し、自車の推奨経路とそれらに対応する回避案内を判定することにより、特殊車両の走行レーンに対応した適切な回避動作を案内することができる。
【0009】
(5)前記ナビゲーション装置は、近傍車両の通行状態を検出する近傍車両検出手段をさらに備えてもよい。前記回避案内判定手段は、前記近傍車両の前記通行状態に対応する前記回避案内を判定してもよい。
ナビゲーション装置は、近傍車両の通行状態を検出し、近傍車両の通行状態に対応する回避案内を判定することにより、近傍車両の存在時に特殊車両が接近しても、適切な回避動作を案内することができる。
【0010】
(6)前記ナビゲーション装置は、前記自車の前方障害を検出する障害検出手段をさらに備えてもよい。前記回避案内判定手段は、前記前方障害に対応する前記回避案内を判定してもよい。
ナビゲーション装置は、カーブ、渋滞、幅員減少などの前方障害を検出し、検出した前方障害に対応する回避案内を判定することにより、前方障害の存在時に特殊車両が接近しても、適切な回避動作を案内することができる。
【0011】
(7)前記特殊車両検出手段は、車車間通信により前記特殊車両の前記位置を検出してもよい。
ナビゲーション装置は、車車間通信により特殊車両の自車に対する位置を検出することにより、特殊車両の自車に対する位置を高精度に検出することができる。
【0012】
(8)前記特殊車両検出手段は、音響認識により前記特殊車両の前記位置を検出してもよい。
【0013】
(9)上記目的を達成するためのナビゲーション方法は、自車の走行レーンを検出する自車走行レーン検出段階と、特殊車両の前記自車に対する位置を検出する特殊車両検出段階と、前記自車の前記走行レーンと前記特殊車両の前記位置とに対応する回避案内を判定する回避案内判定段階と、前記回避案内を出力する案内段階と、を含む。
自車の走行レーンと特殊車両の自車に対する位置を検出し、それらに対応する自車の回避案内を判定することにより、特殊車両の接近時に自車の走行レーンに対応した適切な回避動作を案内することができる。
【0014】
(10)上記目的を達成するためのナビゲーション方法は、自車の道路網上の位置を検出する自車位置検出段階と、前記自車の目的地を設定する目的地設定段階と、前記自車の前記位置と前記自車の目的地とに対応する推奨経路を探索する経路探索段階と、特殊車両の道路網上の位置及び走行レーンを検出する特殊車両検出段階と、前記推奨経路と前記特殊車両の前記位置と前記走行レーンとに対応する前記自車の回避案内を判定する回避案内判定段階と、前記回避案内を出力する案内段階と、を含む。
特殊車両の道路網上の位置と走行レーンとを検出し、自車の推奨経路とそれらに対応する回避案内を判定することにより、特殊車両の走行レーンに対応した適切な回避動作を案内することができる。
【0015】
尚、請求項に記載された方法の各動作の順序は、技術上の阻害要因がない限り、記載順に限定されるものではなく、どのような順序で実行されてもよく、また同時に実行されてもよい。また、本発明に備わる複数の手段の各機能は、構成自体で機能が特定されるハードウェア資源、プログラムにより機能が特定されるハードウェア資源、又はそれらの組み合わせにより実現される。また、これら複数の手段の各機能は、各々が物理的に互いに独立したハードウェア資源で実現されるものに限定されない。
【発明を実施するための最良の形態】
【0016】
以下、実施例に基づいて本発明の実施の形態を説明する。
(ナビゲーション装置の構成)
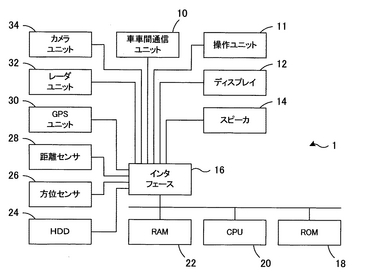
図2は本発明の一実施例によるナビゲーション装置1のハードウェア構成を示すブロック図である。ナビゲーション装置1は自動車、オートバイ等の車両に搭載される。
ハードディスク装置(HDD)24には、地図データベース(地図DB)、回避案内データベース(回避案内DB)等が格納されている。
【0017】
自車位置検出手段としての方位センサ26は、推測航法に用いる地磁気センサ、左右車輪速度差センサ、振動ジャイロ、ガスレートジャイロ、光ファイバジャイロ等で構成されている。
自車位置検出手段としての距離センサ28は、推測航法に用いられ、スピードメータに使用されている車速センサで構成される。車速を時間で積分することにより、走行距離が求まる。電波や超音波を用いたドップラ対地速度センサ、光と空間フィルタを用いた対地速度センサで距離センサ28を構成してもよい。
【0018】
自車位置検出手段としてのGPSユニット30は、衛星航法に用いる3個又は4個の衛星から送られてくる軌道データを受信し、自車の現在地の緯度経度データを出力するためのアンテナ、ASIC等で構成される。
近傍車両検出手段としてのレーダユニット32は、光レーダ、電波レーダ等で構成され、自車の前方及び側方に存在する近傍車両を検出する。カメラで自車の近傍画像を撮像し、画像処理によって近傍車両を検出してもよい。
【0019】
自車走行レーン検出手段としてのカメラユニット34は、レーンマーカ認識に用いるCCDカメラ、CMOSカメラ等のディジタルカメラで構成され、自車の後方路面画像を撮像することにより、自車の走行レーンを特定するための白線を撮像する。誘導ケーブル方式、磁気マーカ方式、リフレクタ方式に対応したレーンマーカを認識することにより、自車の走行レーンを検出してもよい。
【0020】
特殊車両検出手段としての車車間通信ユニット10は、電波、光を媒体として近傍車両との直接又は間接通信を行うための送信機及び受信機で構成される。車車間通信は自車及び特殊車両と道路に設けられた通信ゾーンとの路車間通信の組み合わせで実現してもよい。また自車に対する特殊車両の位置は、車車間通信を用いずに、特殊車両から発せられるサイレン音などを複数のマイクで入力し、音響の到達時間差から方位を求め、音響の強さから距離を求めることによって、特定することもできる。
【0021】
操作ユニット11は、目的地の入力等に用いるリモートコントローラ、操作パネル等で構成される。目的地はマイクによって音声入力し、音声入力された目的地を音声認識してもよい。
案内手段としてのディスプレイ12は、地図や回避案内の表示に用いるLCD(Liquid Crystal Display)、HUD(Head Up Display)等で構成される。回避案内は、地図表示に用いるディスプレイとは別のディスプレイ、例えば車速、距離、エンジン回転数等を表示するディスプレイで表示してもよい。
【0022】
案内手段としてのスピーカ14は、回避案内の音声の出力に用いられる。スピーカ14はオーディオスピーカと共用してもよいし、ナビゲーション専用のものを設けてもよい。
インタフェース16は、AD変換器、DA変換器等で構成され、上述した各種の入出力ユニットとCPU20との間で信号形態の変換を行う。
RAM22は、CPU20で処理されるデータやプログラムを一時的に格納する。
【0023】
ROM18は、CPU20で実行される制御プログラムを格納しているEEPROMなどの不揮発性のメモリである。制御プログラムはHDD24に格納してもよい。制御プログラムや地図DBや回避案内DBは、所定のサーバからのネットワークを介したダウンロード、図示しないリムーバブルメモリ等のコンピュータ読み取り可能な記憶媒体からの読み出し等によってもROM18又はHDD24に格納することができる。
CPU20は、制御プログラムを実行することによりナビゲーション装置1の各部を制御する。
【0024】
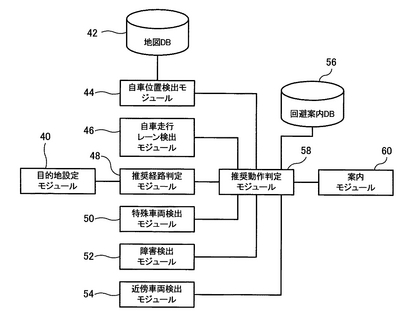
図3はナビゲーション装置1の制御プログラムのソフトウェア構成を示すブロック図である。
目的地設定モジュール40は、CPU20を目的地設定手段として機能させるプログラム部品であって、操作ユニット11からの入力に応じて目的地を設定する。操作ユニット11からの入力が目的地の緯度経度以外の情報、例えば電話番号等である場合、目的地設定モジュール40は電話番号等の情報からそれに対応する緯度経度をデータベースを参照して設定する。
【0025】
地図DB42は、グラフ形式で地図をデジタル表現した情報で構成されるデータベースであって、自車の道路網上の位置の検出、ならびに推奨経路の探索及び表示に用いられる。地図DB42では、交差点、曲がり点、行き止まり点などはノードであり、道路はノードとノードを結ぶリンクとして定義されている。また各リンクには距離、制限速度、レーン数、幅員、カーブの半径などが属性情報として定義されている。特殊車両の回避動作に関係する急カーブ、幅員減少等の静的な前方障害は、リンクに定義されている幅員、カーブの半径で特定可能である。
【0026】
自車位置検出モジュール44は、CPU20を自車位置検出手段として機能させるプログラム部品である。自車位置検出モジュール44は、地図DB42を用いてマップマッチングによる補正を行いながら、GPSユニット30から入力される自車の現在地の緯度経度データと、距離センサ28から入力される走行距離と、方位センサ26から入力される進行方位とに基づいて自車の道路網上の位置を算出する。
【0027】
自車走行レーン検出モジュール46は、CPU20を自車走行レーン検出手段として機能させるプログラム部品である。自車走行レーン検出モジュール46は、カメラユニット34から入力される自車後方の画像データを解析し、エッジ抽出やテンプレートマッチングにより走行レーンを区切る破線の白線と中央分離帯に相当する実線の白線とを認識し、地図DB42に記録されているレーン数を参照しながら、自車の走行レーンを検出する。
【0028】
推奨経路探索モジュール48は、CPU20を経路判定手段として機能させるプログラム部品である。推奨経路探索モジュール48は、地図DB42を参照して出発地に対応するノードから目的地に対応するノードまでリンクを辿りながら出発地から目的地に到る経路を探索する。
特殊車両検出モジュール50は、CPU20を特殊車両検出手段として機能させるプログラム部品である。特殊車両検出モジュール50は、車車間通信ユニット10から入力される救急車、消防車、パトカー、暴走車両等の特殊車両の現在地と自車位置検出モジュール44が出力する自車の現在地との道路網上の位置関係を特定し、自車に接近する特殊車両を検出する。また特殊車両検出モジュール50は特殊車両の走行レーンを車車間通信ユニット10の入力から検出する。
【0029】
障害検出モジュール52は、CPU20を障害検出手段として機能させるプログラム部品である。前述したように地図DB42から特定可能な前方の急カーブ、幅員減少等の静的な障害を自車の道路網上の現在位置に基づいて検出したり、VICS(登録商標)等で配信される渋滞情報、事故情報等を路車間通信や音声多重ラジオ放送の受信によって取得することによって動的な前方障害を検出する。
【0030】
近傍車両検出モジュール54は、CPU20を近傍車両検出手段として機能させるプログラム部品である。近傍車両検出モジュール54は、レーダユニット32から入力される、前方又は側方に存在する対象物の相対速度や対象物までの距離に基づいて、近傍車両の存在と近傍車両までの距離と近傍車両の速度とを検出する。近傍車両の存在や速度といった通行状態が特定できれば、特殊車両の回避動作に関係する、近傍車両の走行レーンの混雑度や併走車両の有無などを特定することができる。
【0031】
回避案内判定モジュール58は、CPU20を回避案内判定手段として機能させるプログラム部品である。回避案内判定モジュール58は、上記の各モジュールから出力される自車の現在地、走行レーン、推奨経路、前方障害及び近傍車両の通行状態、ならびに、特殊車両の現在地及び走行レーンに対応する適切な回避案内を、回避案内DB56を参照して判定する。
回避案内DB56は、自車の現在地、走行レーン、推奨経路、前方障害及び近傍車両の通行状態、ならびに、特殊車両の現在地及び走行レーンを入力とし、特殊車両を回避するための回避案内を出力とするデータベースである。
【0032】
図4、図5、図6、図7は回避案内DB56に記録されている回避案内の一例を示す図である。尚、図4、図5、図6、図7は回避案内DB56の入出力の関係を示しているに過ぎず、データベースのデータ構造を図示したものではない。
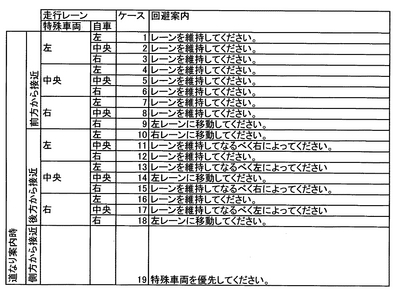
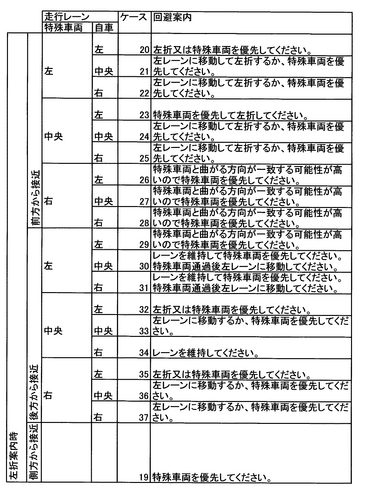
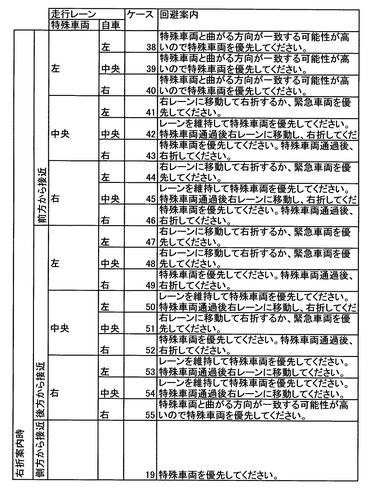
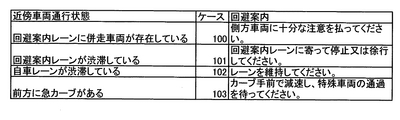
図4、図5、図6、図7に示す回避案内は、片側3レーンの道路を通行中に、特殊車両の回避動作の案内に用いられるものであって、自車及び特殊車両の走行レーンと、特殊車両が自車に対して接近してきている方向と、近傍車両の通行状態との組み合わせ毎に特殊車両の回避案内が登録されている。通行中の道路のレーン数に応じて特殊車両の回避案内を回避案内DB56に登録しておくことが望ましい。また道なり案内時と右左折案内時とで適切な回避案内が異なるため、道なり案内時と右左折案内時とに応じた回避案内を回避案内DB56に登録しておくことが望ましい。また、近傍車両の通行状態に応じて適切な回避動作が変わるため、近傍車両の通行状態に応じた回避案内を回避案内DB56に登録しておくことが望ましい。図4、図5、図6は、それぞれ道なり案内時、左折案内時、右折案内時の回避案内の一例を示している。図7は図4、図5または図6に基づいて特定される回避案内と合わせて出力される、近傍車両の通行状態に応じた回避案内が登録されているテーブルである。回避案内DB56に記録される回避案内は、画面表示するためのテキストデータであってもよいし、音声出力するための音声データであってもよいし、その両方であってもよい。以下、いくつかの回避動作について具体的に説明する。
【0033】
道なり案内時に前方から特殊車両が接近している場合(ケース1〜9)は、自車と特殊車両とが隣り合うレーンを走行中の場合(ケース9)を除いて、適切な回避動作はレーン維持である。自車と特殊車両とが隣り合うレーンを走行中の場合(ケース9)、特殊車両が対向レーンである自車レーンを逆走してくる可能性があるため、適切な回避動作は左レーンへの移動である。
道なり案内時に後方から特殊車両が接近している場合(ケース10〜18)、自車と特殊車両の走行レーンが一致しないようにレーンを移動又は維持、若しくは走行レーン内で左右どちらかに寄ることが適切である。
【0034】
特殊車両が側方から接近している場合、すなわち自車前方にある交差点で交わる道路を特殊車両がその交差点に向かって走行している場合(ケース19)、特殊車両の通過を待ってからその交差点に進入するなど、特殊車両を優先して走行することが適切である。
曲がるべき交差点が近付いてきている時に特殊車両が接近してきている場合であって、曲がった先の道路に特殊車両が進む可能性が高い場合、(ケース26、27、28、29、38、39、40、55)、特殊車両の交差点通過を待ってから曲がるなど、特殊車両を優先して走行することが適切である。また曲がるべき交差点が近付いてきている時に自車と同じレーンを走行する特殊車両が後方から接近してきている場合(ケース33、37、47、51)、その交差点で曲がるべき方向に応じたレーンに近付くようにレーン移動することが適切である。
【0035】
特殊車両を回避するためにレーンを移動しなければならない場合であって、回避先のレーンに併走する車両が存在する場合(ケース100)、併走する車両を避けてレーンを移動する必要がある。
特殊車両を回避するためにレーンを移動しなければならない場合であって、回避先のレーンが渋滞している場合(ケース101)、レーン移動が困難であるため、回避先のレーンに寄って停止又は徐行する必要がある。
特殊車両の接近時に自車レーンが渋滞している場合(ケース102)、レーン移動は危険であるため、レーンを維持することが適切である。
特殊車両の接近時に前方に急カーブがある場合(ケース103)、急カーブしている路上で特殊車両とのすれ違いは危険であるため、カーブ手前で減速し、カーブに進入する前に特殊車両とすれ違うことが適切である。
【0036】
(ナビゲーション装置の作動)
図8はナビゲーション装置1の処理の流れを示すフローチャートである。図8に示す処理は、CPU20が制御プログラムを実行することによって実行され、目的地がナビゲーション装置1に設定され、推奨経路探索が終了した後に経路案内モードに遷移すると開始する。
ステップS100では、ナビゲーション装置1は自車の位置として道路網上の走行位置及び走行レーンを検出する。具体的には上述したように、CPU20がGPSユニット30から入力される自車の現在地の緯度経度データと、距離センサ28から入力される走行距離と、方位センサ26から入力される進行方位と、地図DB42とに基づいて自車の道路網上の走行位置を検出する。さらに上述したようにCPU20がカメラユニット34から入力される自車後方路面の動画像データと地図DB42とに基づいて自車の走行レーンを検出する。
【0037】
ステップS102では、ナビゲーション装置1は特殊車両の道路網上の走行位置を検出する。具体的には上述したように、CPU20は車車間通信ユニット10を用いて特殊車両の道路網上の走行位置を検出する。
ステップS104では、ナビゲーション装置1は特殊車両が自車に接近しているか否かを判定する。具体的には例えば、CPU20は自車及び特殊車両が位置している地図DB42のリンクの位置関係と、自車と特殊車両との距離の変化とに基づいて判定する。例えば、2車の距離が所定範囲(例えば200m)内であって、かつ2車の距離が時間の経過とともに狭まっているときであって、2車の位置するリンクが以下の関係にあるとき、CPU20は特殊車両が自車に接近していると判定する。
1.自車と特殊車両が位置するリンクが一致する。
2.自車の前方ノードで結合されているリンク上に特殊車両が位置している。
尚、特殊車両と自車との距離は、マイクを用いて検出できる特殊車両のサイレン音の大きさに基づいて判定してもよい。また特殊車両の方向は、複数のマイクへのサイレン音の到達遅延時間や指向性を持った複数のマイクの出力レベルから判定してもよい。
【0038】
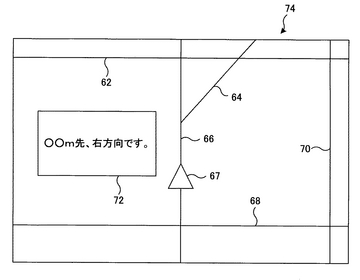
特殊車両が自車に接近していない場合、ナビゲーション装置1は通常の経路案内処理を実行する(ステップS106)。具体的には例えば図9に示すように、ナビゲーション装置1は地図DB42に基づいて自車周辺の地図をディスプレイ12に表示するとともに、地図上に自車位置を表示し、曲がるべき交差点が接近すると、曲がるべき方向を画面上の文字やマークやスピーカから出力する音声等によって案内する。ディスプレイ12に表示される図9に示す画面74において、62、64、66、68、70は道路を示す線、67は自車位置を示すマーク、72は経路案内のポップアップウィンドウである。
【0039】
特殊車両が自車に接近している場合、ナビゲーション装置1は特殊車両の走行レーンを検出する(ステップS108)。具体的には例えば上述したように車車間通信により特殊車両の走行レーンを検出する。尚、ナビゲーション装置1はサイレン光及びレーンマーカの画像認識によって特殊車両の走行レーンを判定してもよい。
ステップS110では、ナビゲーション装置1は特殊車両の走行レーンを検出できたか否かを判定する。具体的には例えばCPU20が車車間通信により特殊車両の走行レーン情報を取得できたか否かを判定する。
【0040】
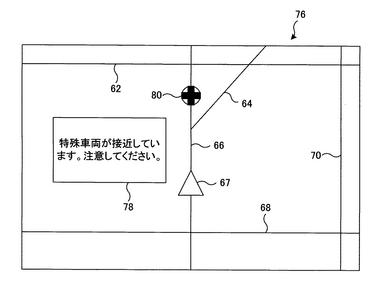
特殊車両の走行レーンを検出できなかった場合、ナビゲーション装置1は特殊車両の接近を警告する(ステップS112)。具体的には例えばナビゲーション装置1は図10に示すように特殊車両の位置を地図上に点滅表示したり、警告文を画面上に表示したり、警告音声をスピーカから出力する。ディスプレイ12に表示される図10に示す画面76において、78は警告文のポップアップウィンドウ、80は特殊車両の位置を示すマークである。尚、ナビゲーション装置1は警告音だけ出力してもよいし、警告文を画面表示するだけでもよいし、画面全体を点滅させてもよいし、特殊車両の位置を示すマークを点滅表示するだけでもよい。
【0041】
特殊車両の走行レーンを検出できた場合、ナビゲーション装置1は自車の走行状況を検出する(ステップS114)。具体的には例えば、CPU20は道なりに走行すべき状態であるか、右折又は左折すべき交差点が近付いている状態であるか、前方にカーブや幅員減少などの障害があるか、自車が渋滞レーンを走行中であるか、などを検出する。ナビゲーション装置1は、このように自車の走行状況を検出することにより、よりきめ細かに特殊車両の回避動作を判定することができる。道なりに走行すべき状態であるか、右折又は左折をすべき交差点が近付いている状態であるかは、自車の道路網上の位置と判定済の推奨経路とに基づいて判定される。前方障害は上述したように地図DB42やVICS情報に基づいて判定される。自車が渋滞レーンを走行中であるかは、走行速度や前後車両との距離や自車の位置(前方交差点からの距離など)などに基づいて判定される。
【0042】
ステップS116では、ナビゲーション装置1は近傍車両の走行状況を検出する。具体的には例えば上述したようにCPU20は、レーダユニット32から入力される、前方又は側方に存在する対象物の相対速度や対象物までの距離に基づいて、併走車両の存在や隣のレーンの渋滞を検出する。
ステップS118では、ナビゲーション装置1は自車の位置(道路網上の位置及び走行レーン)及び走行状況、特殊車両の位置(走行レーン及び道路網上の位置)、並びに近傍車両の走行状況に基づいて適切な回避案内を判定する。具体的にはCPU20がこれらの情報に対応する、回避案内の識別子としてのケースを回避案内DB56に基づいて特定する。尚、近傍車両の通行状態が図7に示す状態にある場合、図4、図5及び図6に示すケースとともに図7に示すケースが特定される。
【0043】
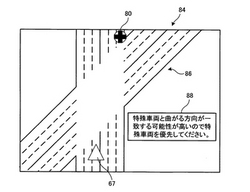
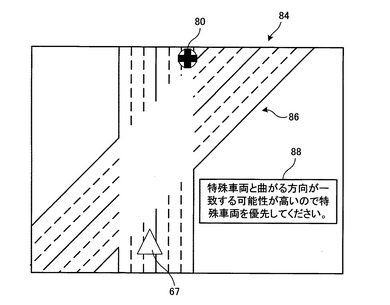
ステップS120では、ナビゲーション装置1は特定したケースに対応する案内データを回避案内DB56から取得し、回避動作を案内する。例えばケース40の場合には、ナビゲーション装置1はディスプレイ12に図1に示す画面84を表示するとともに、スピーカ14から回避動作の案内音声を出力する。画面84において、86は交差点で交わる片側3レーンの道路を示し、88は案内文のポップアップウィンドウを示す。図1ではレーンを明示する画面を例示しているが、道路を図4及び図6に示すように一本線で表示してもよい。また、ポップアップウィンドウ88を表示せずに音声出力のみで回避動作を案内してもよい。ポップアップウィンドウ88に表示されるテキストやスピーカ14から出力される音声は回避案内DB56に格納されている案内データに基づいて出力される。尚、ナビゲーション装置1は、自車及び近傍車両が図7に示す状態にある場合、図4、図5及び図6に示す回避案内とともに図7に示す回避案内を出力する。ただし、自車及び近傍車両の通行状態に対応する回避案内が、自車及び特殊車両の道路網上の位置及び走行レーンに対応する回避案内と矛盾する場合(例えばケース10とケース102がステップS118で特定される場合)、CPU20は近傍車両の通行状態に対応する回避案内(例えばケース102の回避案内)のみが出力されるように制御することが望ましい。このような制御に必要なケースの組み合わせ情報も回避案内DBに登録しておくことができる。
【0044】
以上説明したステップS108からS120までの処理は、特殊車両が自車を通り過ぎるまで繰り返される。特殊車両が自車を通り過ぎると、自車と特殊車両とが時間の経過とともに離れていくため、ステップS104で特殊車両が接近していないと判定され、通常の経路案内(ステップS106)が実行されるようになる。
【0045】
以上説明したナビゲーション装置1は、自車の走行レーンと特殊車両の自車に対する位置とを検出するため、例えば片側3レーンの道路の走行中に前方から特殊車両が接近してきても、左レーンを走行中にはレーン維持を案内し、右レーンを走行中には左レーンに移動を案内するなど、自車の走行レーンに対応した適切な回避動作を案内することができる。また、ナビゲーション装置1は、予め判定した推奨経路を加味して回避動作を判定するため、曲がるべき交差点が近づいている時には、特殊車両の通過後にその交差点に円滑に進入できる回避動作を案内することができる。また、ナビゲーション装置1は、近傍車両の通行状態を検出して回避動作を判定するため、併走車両があったり、回避先のレーンが渋滞している場合であっても、適切な回避動作を案内することができる。また、ナビゲーション装置1は、自車の前方障害を検出して回避動作を判定するため、前方に急カーブや幅員減少がある場合であっても、適切な回避動作を案内することができる。また、ナビゲーション装置1は、車車間通信を用いて特殊車両の走行レーンを検出するため、特殊車両の通行を妨げない範囲で自車及び近傍車両の停滞やレーン移動を抑制する案内をすることができる。
【0046】
尚、上述した実施例では、ナビゲーション装置1は特殊車両の自車に対する位置として特殊車両の道路網上の位置及び走行レーンを検出しているが、特殊車両の自車に対する位置として特殊車両の走行レーンだけをナビゲーション装置が検出してもよい。このような実施形態は、自車と特殊車両とが前方限定又は後方限定といった指向性を持った短距離の車車間通信を行い、この車車間通信により特殊車両の走行レーンを特定する場合に適用できる。
【0047】
また、上述した実施例では、ナビゲーション装置1は自車の走行レーンを加味して回避動作を案内しているが、ナビゲーション装置は自車の走行レーンを加味せずに、自車の推奨経路、並びに特殊車両の道路網上の位置及び走行レーンに基づいて回避動作を案内してもよい。このような実施形態であっても、自車と特殊車両とが同じ交差点に接近している場合に、特殊車両の走行レーンから特殊車両の進行経路を予測できるため、適切な回避動作を案内することができる。
【図面の簡単な説明】
【0048】
【図1】本発明の一実施例にかかる画面を示す図。
【図2】本発明の一実施例にかかるハードウェアのブロック図。
【図3】本発明の一実施例にかかるソフトウェアのブロック図。
【図4】本発明の一実施例にかかる回避案内を示す図。
【図5】本発明の一実施例にかかる回避案内を示す図。
【図6】本発明の一実施例にかかる回避案内を示す図。
【図7】本発明の一実施例にかかる回避案内を示す図。
【図8】本発明の一実施例にかかるフローチャート。
【図9】本発明の一実施例にかかる画面を示す図。
【図10】本発明の一実施例にかかる画面を示す図。
【符号の説明】
【0049】
1:ナビゲーション装置、10:車車間通信ユニット(特殊車両検出手段)、11:操作ユニット(目的地設定手段)、12:ディスプレイ(案内手段)、14:スピーカ(案内手段)、20:CPU(自車走行レーン検出手段、特殊車両検出手段、回避案内判定手段、案内手段、自車位置検出手段、目的地設定手段、経路判定手段、近傍車両検出手段、障害検出手段)、26:方位センサ(自車位置検出手段)、28:距離センサ(自車位置検出手段)、30:GPSユニット(自車位置検出手段)、32:レーダユニット(近傍車両検出手段)、34:カメラユニット(自車走行レーン検出手段)
【技術分野】
【0001】
本発明はナビゲーション装置及びナビゲーション方法に関し、特に特殊車両の回避動作案内に関する。
【背景技術】
【0002】
従来、自車に緊急車両等の特殊車両が接近すると特殊車両の接近を案内したり、待避地点を案内するナビゲーション装置が知られている(例えば特許文献1、2参照)。
しかし、特許文献1、2に記載されたナビゲーション装置によると、自車又は特殊車両の走行レーンに対応した回避動作を案内しないため、特殊車両の接近に伴う案内が不適切になる場合がある。
【0003】
【特許文献1】特開平10−86761号公報
【特許文献2】特開平11ー48886号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は上述の問題に鑑みて創作されたものであって、特殊車両の接近時に自車又は特殊車両の走行レーンに対応した適切な回避動作を案内するナビゲーション装置及びナビゲーション方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
(1)上記目的を達成するためのナビゲーション装置は、自車の走行レーンを検出する自車走行レーン検出手段と、特殊車両の前記自車に対する位置を検出する特殊車両検出手段と、前記自車の前記走行レーンと前記特殊車両の前記位置とに対応する回避案内を判定する回避案内判定手段と、前記回避案内を出力する案内手段と、を備える。
ナビゲーション装置は、自車の走行レーンと特殊車両の自車に対する位置とを検出し、それらに対応する回避案内を判定することにより、特殊車両の接近時に自車の走行レーンに対応した適切な回避動作を案内することができる。
【0006】
(2)前記特殊車両検出手段は、前記特殊車両の走行レーンを検出してもよい。前記回避案内判定手段は、前記特殊車両の前記走行レーンに対応する前記回避案内を判定してもよい。
ナビゲーション装置は、特殊車両の走行レーンを検出し、特殊車両の走行レーンに対応する回避案内を判定することにより、特殊車両の接近時に自車と特殊車両の走行レーンに対応したより適切な回避動作を案内することができる。
【0007】
(3)前記ナビゲーション装置は、前記自車の道路網上の位置を検出する自車位置検出手段と、前記自車の目的地を設定する目的地設定手段と、前記自車の前記位置と前記自車の目的地とに対応する推奨経路を判定する経路判定手段とをさらに備えてもよい。前記回避案内判定手段は、前記推奨経路に対応する前記回避案内を判定してもよい。
ナビゲーション装置は、自車の道路網上の位置と目的地とに対応する推奨経路を判定し、推奨経路に対応する回避案内を判定することにより、交差点接近時に特殊車両が接近しても、自車の走行レーンに対応した適切な回避動作を案内することができる。
【0008】
(4)上記目的を達成するためのナビゲーション装置は、自車の道路網上の位置を検出する自車位置検出手段と、前記自車の目的地を設定する目的地設定手段と、前記自車の前記位置と前記自車の目的地とに対応する推奨経路を探索する経路探索手段と、特殊車両の道路網上の位置及び走行レーンを検出する特殊車両検出手段と、前記推奨経路と前記特殊車両の前記位置と前記走行レーンとに対応する前記自車の回避案内を判定する回避案内判定手段と、前記回避案内を出力する案内手段と、を備える。
ナビゲーション装置は、特殊車両の道路網上の位置と走行レーンとを検出し、自車の推奨経路とそれらに対応する回避案内を判定することにより、特殊車両の走行レーンに対応した適切な回避動作を案内することができる。
【0009】
(5)前記ナビゲーション装置は、近傍車両の通行状態を検出する近傍車両検出手段をさらに備えてもよい。前記回避案内判定手段は、前記近傍車両の前記通行状態に対応する前記回避案内を判定してもよい。
ナビゲーション装置は、近傍車両の通行状態を検出し、近傍車両の通行状態に対応する回避案内を判定することにより、近傍車両の存在時に特殊車両が接近しても、適切な回避動作を案内することができる。
【0010】
(6)前記ナビゲーション装置は、前記自車の前方障害を検出する障害検出手段をさらに備えてもよい。前記回避案内判定手段は、前記前方障害に対応する前記回避案内を判定してもよい。
ナビゲーション装置は、カーブ、渋滞、幅員減少などの前方障害を検出し、検出した前方障害に対応する回避案内を判定することにより、前方障害の存在時に特殊車両が接近しても、適切な回避動作を案内することができる。
【0011】
(7)前記特殊車両検出手段は、車車間通信により前記特殊車両の前記位置を検出してもよい。
ナビゲーション装置は、車車間通信により特殊車両の自車に対する位置を検出することにより、特殊車両の自車に対する位置を高精度に検出することができる。
【0012】
(8)前記特殊車両検出手段は、音響認識により前記特殊車両の前記位置を検出してもよい。
【0013】
(9)上記目的を達成するためのナビゲーション方法は、自車の走行レーンを検出する自車走行レーン検出段階と、特殊車両の前記自車に対する位置を検出する特殊車両検出段階と、前記自車の前記走行レーンと前記特殊車両の前記位置とに対応する回避案内を判定する回避案内判定段階と、前記回避案内を出力する案内段階と、を含む。
自車の走行レーンと特殊車両の自車に対する位置を検出し、それらに対応する自車の回避案内を判定することにより、特殊車両の接近時に自車の走行レーンに対応した適切な回避動作を案内することができる。
【0014】
(10)上記目的を達成するためのナビゲーション方法は、自車の道路網上の位置を検出する自車位置検出段階と、前記自車の目的地を設定する目的地設定段階と、前記自車の前記位置と前記自車の目的地とに対応する推奨経路を探索する経路探索段階と、特殊車両の道路網上の位置及び走行レーンを検出する特殊車両検出段階と、前記推奨経路と前記特殊車両の前記位置と前記走行レーンとに対応する前記自車の回避案内を判定する回避案内判定段階と、前記回避案内を出力する案内段階と、を含む。
特殊車両の道路網上の位置と走行レーンとを検出し、自車の推奨経路とそれらに対応する回避案内を判定することにより、特殊車両の走行レーンに対応した適切な回避動作を案内することができる。
【0015】
尚、請求項に記載された方法の各動作の順序は、技術上の阻害要因がない限り、記載順に限定されるものではなく、どのような順序で実行されてもよく、また同時に実行されてもよい。また、本発明に備わる複数の手段の各機能は、構成自体で機能が特定されるハードウェア資源、プログラムにより機能が特定されるハードウェア資源、又はそれらの組み合わせにより実現される。また、これら複数の手段の各機能は、各々が物理的に互いに独立したハードウェア資源で実現されるものに限定されない。
【発明を実施するための最良の形態】
【0016】
以下、実施例に基づいて本発明の実施の形態を説明する。
(ナビゲーション装置の構成)
図2は本発明の一実施例によるナビゲーション装置1のハードウェア構成を示すブロック図である。ナビゲーション装置1は自動車、オートバイ等の車両に搭載される。
ハードディスク装置(HDD)24には、地図データベース(地図DB)、回避案内データベース(回避案内DB)等が格納されている。
【0017】
自車位置検出手段としての方位センサ26は、推測航法に用いる地磁気センサ、左右車輪速度差センサ、振動ジャイロ、ガスレートジャイロ、光ファイバジャイロ等で構成されている。
自車位置検出手段としての距離センサ28は、推測航法に用いられ、スピードメータに使用されている車速センサで構成される。車速を時間で積分することにより、走行距離が求まる。電波や超音波を用いたドップラ対地速度センサ、光と空間フィルタを用いた対地速度センサで距離センサ28を構成してもよい。
【0018】
自車位置検出手段としてのGPSユニット30は、衛星航法に用いる3個又は4個の衛星から送られてくる軌道データを受信し、自車の現在地の緯度経度データを出力するためのアンテナ、ASIC等で構成される。
近傍車両検出手段としてのレーダユニット32は、光レーダ、電波レーダ等で構成され、自車の前方及び側方に存在する近傍車両を検出する。カメラで自車の近傍画像を撮像し、画像処理によって近傍車両を検出してもよい。
【0019】
自車走行レーン検出手段としてのカメラユニット34は、レーンマーカ認識に用いるCCDカメラ、CMOSカメラ等のディジタルカメラで構成され、自車の後方路面画像を撮像することにより、自車の走行レーンを特定するための白線を撮像する。誘導ケーブル方式、磁気マーカ方式、リフレクタ方式に対応したレーンマーカを認識することにより、自車の走行レーンを検出してもよい。
【0020】
特殊車両検出手段としての車車間通信ユニット10は、電波、光を媒体として近傍車両との直接又は間接通信を行うための送信機及び受信機で構成される。車車間通信は自車及び特殊車両と道路に設けられた通信ゾーンとの路車間通信の組み合わせで実現してもよい。また自車に対する特殊車両の位置は、車車間通信を用いずに、特殊車両から発せられるサイレン音などを複数のマイクで入力し、音響の到達時間差から方位を求め、音響の強さから距離を求めることによって、特定することもできる。
【0021】
操作ユニット11は、目的地の入力等に用いるリモートコントローラ、操作パネル等で構成される。目的地はマイクによって音声入力し、音声入力された目的地を音声認識してもよい。
案内手段としてのディスプレイ12は、地図や回避案内の表示に用いるLCD(Liquid Crystal Display)、HUD(Head Up Display)等で構成される。回避案内は、地図表示に用いるディスプレイとは別のディスプレイ、例えば車速、距離、エンジン回転数等を表示するディスプレイで表示してもよい。
【0022】
案内手段としてのスピーカ14は、回避案内の音声の出力に用いられる。スピーカ14はオーディオスピーカと共用してもよいし、ナビゲーション専用のものを設けてもよい。
インタフェース16は、AD変換器、DA変換器等で構成され、上述した各種の入出力ユニットとCPU20との間で信号形態の変換を行う。
RAM22は、CPU20で処理されるデータやプログラムを一時的に格納する。
【0023】
ROM18は、CPU20で実行される制御プログラムを格納しているEEPROMなどの不揮発性のメモリである。制御プログラムはHDD24に格納してもよい。制御プログラムや地図DBや回避案内DBは、所定のサーバからのネットワークを介したダウンロード、図示しないリムーバブルメモリ等のコンピュータ読み取り可能な記憶媒体からの読み出し等によってもROM18又はHDD24に格納することができる。
CPU20は、制御プログラムを実行することによりナビゲーション装置1の各部を制御する。
【0024】
図3はナビゲーション装置1の制御プログラムのソフトウェア構成を示すブロック図である。
目的地設定モジュール40は、CPU20を目的地設定手段として機能させるプログラム部品であって、操作ユニット11からの入力に応じて目的地を設定する。操作ユニット11からの入力が目的地の緯度経度以外の情報、例えば電話番号等である場合、目的地設定モジュール40は電話番号等の情報からそれに対応する緯度経度をデータベースを参照して設定する。
【0025】
地図DB42は、グラフ形式で地図をデジタル表現した情報で構成されるデータベースであって、自車の道路網上の位置の検出、ならびに推奨経路の探索及び表示に用いられる。地図DB42では、交差点、曲がり点、行き止まり点などはノードであり、道路はノードとノードを結ぶリンクとして定義されている。また各リンクには距離、制限速度、レーン数、幅員、カーブの半径などが属性情報として定義されている。特殊車両の回避動作に関係する急カーブ、幅員減少等の静的な前方障害は、リンクに定義されている幅員、カーブの半径で特定可能である。
【0026】
自車位置検出モジュール44は、CPU20を自車位置検出手段として機能させるプログラム部品である。自車位置検出モジュール44は、地図DB42を用いてマップマッチングによる補正を行いながら、GPSユニット30から入力される自車の現在地の緯度経度データと、距離センサ28から入力される走行距離と、方位センサ26から入力される進行方位とに基づいて自車の道路網上の位置を算出する。
【0027】
自車走行レーン検出モジュール46は、CPU20を自車走行レーン検出手段として機能させるプログラム部品である。自車走行レーン検出モジュール46は、カメラユニット34から入力される自車後方の画像データを解析し、エッジ抽出やテンプレートマッチングにより走行レーンを区切る破線の白線と中央分離帯に相当する実線の白線とを認識し、地図DB42に記録されているレーン数を参照しながら、自車の走行レーンを検出する。
【0028】
推奨経路探索モジュール48は、CPU20を経路判定手段として機能させるプログラム部品である。推奨経路探索モジュール48は、地図DB42を参照して出発地に対応するノードから目的地に対応するノードまでリンクを辿りながら出発地から目的地に到る経路を探索する。
特殊車両検出モジュール50は、CPU20を特殊車両検出手段として機能させるプログラム部品である。特殊車両検出モジュール50は、車車間通信ユニット10から入力される救急車、消防車、パトカー、暴走車両等の特殊車両の現在地と自車位置検出モジュール44が出力する自車の現在地との道路網上の位置関係を特定し、自車に接近する特殊車両を検出する。また特殊車両検出モジュール50は特殊車両の走行レーンを車車間通信ユニット10の入力から検出する。
【0029】
障害検出モジュール52は、CPU20を障害検出手段として機能させるプログラム部品である。前述したように地図DB42から特定可能な前方の急カーブ、幅員減少等の静的な障害を自車の道路網上の現在位置に基づいて検出したり、VICS(登録商標)等で配信される渋滞情報、事故情報等を路車間通信や音声多重ラジオ放送の受信によって取得することによって動的な前方障害を検出する。
【0030】
近傍車両検出モジュール54は、CPU20を近傍車両検出手段として機能させるプログラム部品である。近傍車両検出モジュール54は、レーダユニット32から入力される、前方又は側方に存在する対象物の相対速度や対象物までの距離に基づいて、近傍車両の存在と近傍車両までの距離と近傍車両の速度とを検出する。近傍車両の存在や速度といった通行状態が特定できれば、特殊車両の回避動作に関係する、近傍車両の走行レーンの混雑度や併走車両の有無などを特定することができる。
【0031】
回避案内判定モジュール58は、CPU20を回避案内判定手段として機能させるプログラム部品である。回避案内判定モジュール58は、上記の各モジュールから出力される自車の現在地、走行レーン、推奨経路、前方障害及び近傍車両の通行状態、ならびに、特殊車両の現在地及び走行レーンに対応する適切な回避案内を、回避案内DB56を参照して判定する。
回避案内DB56は、自車の現在地、走行レーン、推奨経路、前方障害及び近傍車両の通行状態、ならびに、特殊車両の現在地及び走行レーンを入力とし、特殊車両を回避するための回避案内を出力とするデータベースである。
【0032】
図4、図5、図6、図7は回避案内DB56に記録されている回避案内の一例を示す図である。尚、図4、図5、図6、図7は回避案内DB56の入出力の関係を示しているに過ぎず、データベースのデータ構造を図示したものではない。
図4、図5、図6、図7に示す回避案内は、片側3レーンの道路を通行中に、特殊車両の回避動作の案内に用いられるものであって、自車及び特殊車両の走行レーンと、特殊車両が自車に対して接近してきている方向と、近傍車両の通行状態との組み合わせ毎に特殊車両の回避案内が登録されている。通行中の道路のレーン数に応じて特殊車両の回避案内を回避案内DB56に登録しておくことが望ましい。また道なり案内時と右左折案内時とで適切な回避案内が異なるため、道なり案内時と右左折案内時とに応じた回避案内を回避案内DB56に登録しておくことが望ましい。また、近傍車両の通行状態に応じて適切な回避動作が変わるため、近傍車両の通行状態に応じた回避案内を回避案内DB56に登録しておくことが望ましい。図4、図5、図6は、それぞれ道なり案内時、左折案内時、右折案内時の回避案内の一例を示している。図7は図4、図5または図6に基づいて特定される回避案内と合わせて出力される、近傍車両の通行状態に応じた回避案内が登録されているテーブルである。回避案内DB56に記録される回避案内は、画面表示するためのテキストデータであってもよいし、音声出力するための音声データであってもよいし、その両方であってもよい。以下、いくつかの回避動作について具体的に説明する。
【0033】
道なり案内時に前方から特殊車両が接近している場合(ケース1〜9)は、自車と特殊車両とが隣り合うレーンを走行中の場合(ケース9)を除いて、適切な回避動作はレーン維持である。自車と特殊車両とが隣り合うレーンを走行中の場合(ケース9)、特殊車両が対向レーンである自車レーンを逆走してくる可能性があるため、適切な回避動作は左レーンへの移動である。
道なり案内時に後方から特殊車両が接近している場合(ケース10〜18)、自車と特殊車両の走行レーンが一致しないようにレーンを移動又は維持、若しくは走行レーン内で左右どちらかに寄ることが適切である。
【0034】
特殊車両が側方から接近している場合、すなわち自車前方にある交差点で交わる道路を特殊車両がその交差点に向かって走行している場合(ケース19)、特殊車両の通過を待ってからその交差点に進入するなど、特殊車両を優先して走行することが適切である。
曲がるべき交差点が近付いてきている時に特殊車両が接近してきている場合であって、曲がった先の道路に特殊車両が進む可能性が高い場合、(ケース26、27、28、29、38、39、40、55)、特殊車両の交差点通過を待ってから曲がるなど、特殊車両を優先して走行することが適切である。また曲がるべき交差点が近付いてきている時に自車と同じレーンを走行する特殊車両が後方から接近してきている場合(ケース33、37、47、51)、その交差点で曲がるべき方向に応じたレーンに近付くようにレーン移動することが適切である。
【0035】
特殊車両を回避するためにレーンを移動しなければならない場合であって、回避先のレーンに併走する車両が存在する場合(ケース100)、併走する車両を避けてレーンを移動する必要がある。
特殊車両を回避するためにレーンを移動しなければならない場合であって、回避先のレーンが渋滞している場合(ケース101)、レーン移動が困難であるため、回避先のレーンに寄って停止又は徐行する必要がある。
特殊車両の接近時に自車レーンが渋滞している場合(ケース102)、レーン移動は危険であるため、レーンを維持することが適切である。
特殊車両の接近時に前方に急カーブがある場合(ケース103)、急カーブしている路上で特殊車両とのすれ違いは危険であるため、カーブ手前で減速し、カーブに進入する前に特殊車両とすれ違うことが適切である。
【0036】
(ナビゲーション装置の作動)
図8はナビゲーション装置1の処理の流れを示すフローチャートである。図8に示す処理は、CPU20が制御プログラムを実行することによって実行され、目的地がナビゲーション装置1に設定され、推奨経路探索が終了した後に経路案内モードに遷移すると開始する。
ステップS100では、ナビゲーション装置1は自車の位置として道路網上の走行位置及び走行レーンを検出する。具体的には上述したように、CPU20がGPSユニット30から入力される自車の現在地の緯度経度データと、距離センサ28から入力される走行距離と、方位センサ26から入力される進行方位と、地図DB42とに基づいて自車の道路網上の走行位置を検出する。さらに上述したようにCPU20がカメラユニット34から入力される自車後方路面の動画像データと地図DB42とに基づいて自車の走行レーンを検出する。
【0037】
ステップS102では、ナビゲーション装置1は特殊車両の道路網上の走行位置を検出する。具体的には上述したように、CPU20は車車間通信ユニット10を用いて特殊車両の道路網上の走行位置を検出する。
ステップS104では、ナビゲーション装置1は特殊車両が自車に接近しているか否かを判定する。具体的には例えば、CPU20は自車及び特殊車両が位置している地図DB42のリンクの位置関係と、自車と特殊車両との距離の変化とに基づいて判定する。例えば、2車の距離が所定範囲(例えば200m)内であって、かつ2車の距離が時間の経過とともに狭まっているときであって、2車の位置するリンクが以下の関係にあるとき、CPU20は特殊車両が自車に接近していると判定する。
1.自車と特殊車両が位置するリンクが一致する。
2.自車の前方ノードで結合されているリンク上に特殊車両が位置している。
尚、特殊車両と自車との距離は、マイクを用いて検出できる特殊車両のサイレン音の大きさに基づいて判定してもよい。また特殊車両の方向は、複数のマイクへのサイレン音の到達遅延時間や指向性を持った複数のマイクの出力レベルから判定してもよい。
【0038】
特殊車両が自車に接近していない場合、ナビゲーション装置1は通常の経路案内処理を実行する(ステップS106)。具体的には例えば図9に示すように、ナビゲーション装置1は地図DB42に基づいて自車周辺の地図をディスプレイ12に表示するとともに、地図上に自車位置を表示し、曲がるべき交差点が接近すると、曲がるべき方向を画面上の文字やマークやスピーカから出力する音声等によって案内する。ディスプレイ12に表示される図9に示す画面74において、62、64、66、68、70は道路を示す線、67は自車位置を示すマーク、72は経路案内のポップアップウィンドウである。
【0039】
特殊車両が自車に接近している場合、ナビゲーション装置1は特殊車両の走行レーンを検出する(ステップS108)。具体的には例えば上述したように車車間通信により特殊車両の走行レーンを検出する。尚、ナビゲーション装置1はサイレン光及びレーンマーカの画像認識によって特殊車両の走行レーンを判定してもよい。
ステップS110では、ナビゲーション装置1は特殊車両の走行レーンを検出できたか否かを判定する。具体的には例えばCPU20が車車間通信により特殊車両の走行レーン情報を取得できたか否かを判定する。
【0040】
特殊車両の走行レーンを検出できなかった場合、ナビゲーション装置1は特殊車両の接近を警告する(ステップS112)。具体的には例えばナビゲーション装置1は図10に示すように特殊車両の位置を地図上に点滅表示したり、警告文を画面上に表示したり、警告音声をスピーカから出力する。ディスプレイ12に表示される図10に示す画面76において、78は警告文のポップアップウィンドウ、80は特殊車両の位置を示すマークである。尚、ナビゲーション装置1は警告音だけ出力してもよいし、警告文を画面表示するだけでもよいし、画面全体を点滅させてもよいし、特殊車両の位置を示すマークを点滅表示するだけでもよい。
【0041】
特殊車両の走行レーンを検出できた場合、ナビゲーション装置1は自車の走行状況を検出する(ステップS114)。具体的には例えば、CPU20は道なりに走行すべき状態であるか、右折又は左折すべき交差点が近付いている状態であるか、前方にカーブや幅員減少などの障害があるか、自車が渋滞レーンを走行中であるか、などを検出する。ナビゲーション装置1は、このように自車の走行状況を検出することにより、よりきめ細かに特殊車両の回避動作を判定することができる。道なりに走行すべき状態であるか、右折又は左折をすべき交差点が近付いている状態であるかは、自車の道路網上の位置と判定済の推奨経路とに基づいて判定される。前方障害は上述したように地図DB42やVICS情報に基づいて判定される。自車が渋滞レーンを走行中であるかは、走行速度や前後車両との距離や自車の位置(前方交差点からの距離など)などに基づいて判定される。
【0042】
ステップS116では、ナビゲーション装置1は近傍車両の走行状況を検出する。具体的には例えば上述したようにCPU20は、レーダユニット32から入力される、前方又は側方に存在する対象物の相対速度や対象物までの距離に基づいて、併走車両の存在や隣のレーンの渋滞を検出する。
ステップS118では、ナビゲーション装置1は自車の位置(道路網上の位置及び走行レーン)及び走行状況、特殊車両の位置(走行レーン及び道路網上の位置)、並びに近傍車両の走行状況に基づいて適切な回避案内を判定する。具体的にはCPU20がこれらの情報に対応する、回避案内の識別子としてのケースを回避案内DB56に基づいて特定する。尚、近傍車両の通行状態が図7に示す状態にある場合、図4、図5及び図6に示すケースとともに図7に示すケースが特定される。
【0043】
ステップS120では、ナビゲーション装置1は特定したケースに対応する案内データを回避案内DB56から取得し、回避動作を案内する。例えばケース40の場合には、ナビゲーション装置1はディスプレイ12に図1に示す画面84を表示するとともに、スピーカ14から回避動作の案内音声を出力する。画面84において、86は交差点で交わる片側3レーンの道路を示し、88は案内文のポップアップウィンドウを示す。図1ではレーンを明示する画面を例示しているが、道路を図4及び図6に示すように一本線で表示してもよい。また、ポップアップウィンドウ88を表示せずに音声出力のみで回避動作を案内してもよい。ポップアップウィンドウ88に表示されるテキストやスピーカ14から出力される音声は回避案内DB56に格納されている案内データに基づいて出力される。尚、ナビゲーション装置1は、自車及び近傍車両が図7に示す状態にある場合、図4、図5及び図6に示す回避案内とともに図7に示す回避案内を出力する。ただし、自車及び近傍車両の通行状態に対応する回避案内が、自車及び特殊車両の道路網上の位置及び走行レーンに対応する回避案内と矛盾する場合(例えばケース10とケース102がステップS118で特定される場合)、CPU20は近傍車両の通行状態に対応する回避案内(例えばケース102の回避案内)のみが出力されるように制御することが望ましい。このような制御に必要なケースの組み合わせ情報も回避案内DBに登録しておくことができる。
【0044】
以上説明したステップS108からS120までの処理は、特殊車両が自車を通り過ぎるまで繰り返される。特殊車両が自車を通り過ぎると、自車と特殊車両とが時間の経過とともに離れていくため、ステップS104で特殊車両が接近していないと判定され、通常の経路案内(ステップS106)が実行されるようになる。
【0045】
以上説明したナビゲーション装置1は、自車の走行レーンと特殊車両の自車に対する位置とを検出するため、例えば片側3レーンの道路の走行中に前方から特殊車両が接近してきても、左レーンを走行中にはレーン維持を案内し、右レーンを走行中には左レーンに移動を案内するなど、自車の走行レーンに対応した適切な回避動作を案内することができる。また、ナビゲーション装置1は、予め判定した推奨経路を加味して回避動作を判定するため、曲がるべき交差点が近づいている時には、特殊車両の通過後にその交差点に円滑に進入できる回避動作を案内することができる。また、ナビゲーション装置1は、近傍車両の通行状態を検出して回避動作を判定するため、併走車両があったり、回避先のレーンが渋滞している場合であっても、適切な回避動作を案内することができる。また、ナビゲーション装置1は、自車の前方障害を検出して回避動作を判定するため、前方に急カーブや幅員減少がある場合であっても、適切な回避動作を案内することができる。また、ナビゲーション装置1は、車車間通信を用いて特殊車両の走行レーンを検出するため、特殊車両の通行を妨げない範囲で自車及び近傍車両の停滞やレーン移動を抑制する案内をすることができる。
【0046】
尚、上述した実施例では、ナビゲーション装置1は特殊車両の自車に対する位置として特殊車両の道路網上の位置及び走行レーンを検出しているが、特殊車両の自車に対する位置として特殊車両の走行レーンだけをナビゲーション装置が検出してもよい。このような実施形態は、自車と特殊車両とが前方限定又は後方限定といった指向性を持った短距離の車車間通信を行い、この車車間通信により特殊車両の走行レーンを特定する場合に適用できる。
【0047】
また、上述した実施例では、ナビゲーション装置1は自車の走行レーンを加味して回避動作を案内しているが、ナビゲーション装置は自車の走行レーンを加味せずに、自車の推奨経路、並びに特殊車両の道路網上の位置及び走行レーンに基づいて回避動作を案内してもよい。このような実施形態であっても、自車と特殊車両とが同じ交差点に接近している場合に、特殊車両の走行レーンから特殊車両の進行経路を予測できるため、適切な回避動作を案内することができる。
【図面の簡単な説明】
【0048】
【図1】本発明の一実施例にかかる画面を示す図。
【図2】本発明の一実施例にかかるハードウェアのブロック図。
【図3】本発明の一実施例にかかるソフトウェアのブロック図。
【図4】本発明の一実施例にかかる回避案内を示す図。
【図5】本発明の一実施例にかかる回避案内を示す図。
【図6】本発明の一実施例にかかる回避案内を示す図。
【図7】本発明の一実施例にかかる回避案内を示す図。
【図8】本発明の一実施例にかかるフローチャート。
【図9】本発明の一実施例にかかる画面を示す図。
【図10】本発明の一実施例にかかる画面を示す図。
【符号の説明】
【0049】
1:ナビゲーション装置、10:車車間通信ユニット(特殊車両検出手段)、11:操作ユニット(目的地設定手段)、12:ディスプレイ(案内手段)、14:スピーカ(案内手段)、20:CPU(自車走行レーン検出手段、特殊車両検出手段、回避案内判定手段、案内手段、自車位置検出手段、目的地設定手段、経路判定手段、近傍車両検出手段、障害検出手段)、26:方位センサ(自車位置検出手段)、28:距離センサ(自車位置検出手段)、30:GPSユニット(自車位置検出手段)、32:レーダユニット(近傍車両検出手段)、34:カメラユニット(自車走行レーン検出手段)
【特許請求の範囲】
【請求項1】
自車の走行レーンを検出する自車走行レーン検出手段と、
特殊車両の前記自車に対する位置を検出する特殊車両検出手段と、
前記自車の前記走行レーンと前記特殊車両の前記位置とに対応する前記自車の回避案内を判定する回避案内判定手段と、
前記回避案内を出力する案内手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
前記特殊車両検出手段は、前記特殊車両の走行レーンを検出し、
前記回避案内判定手段は、前記特殊車両の前記走行レーンに対応する前記回避案内を判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記自車の道路網上の位置を検出する自車位置検出手段と、
前記自車の目的地を設定する目的地設定手段と、
前記自車の前記位置と前記自車の目的地とに対応する推奨経路を探索する経路探索手段とをさらに備え、
前記回避案内判定手段は、前記推奨経路に対応する前記回避案内を判定することを特徴とする請求項1〜3のいずれか一項に記載のナビゲーション装置。
【請求項4】
自車の道路網上の位置を検出する自車位置検出手段と、
前記自車の目的地を設定する目的地設定手段と、
前記自車の前記位置と前記自車の目的地とに対応する推奨経路を探索する経路探索手段と、
特殊車両の道路網上の位置及び走行レーンを検出する特殊車両検出手段と、
前記推奨経路と前記特殊車両の前記位置と前記走行レーンとに対応する前記自車の回避案内を判定する回避案内判定手段と、
前記回避案内を出力する案内手段と、
を備えることを特徴とするナビゲーション装置。
【請求項5】
近傍車両の通行状態を検出する近傍車両検出手段をさらに備え、
前記回避案内判定手段は、前記近傍車両の前記通行状態に対応する前記回避案内を判定することを特徴とする請求項1〜4のいずれか一項に記載のナビゲーション装置。
【請求項6】
前記自車の前方障害を検出する障害検出手段をさらに備え、
前記回避案内判定手段は、前記前方障害に対応する前記回避案内を判定することを特徴とする請求項1〜5のいずれか一項に記載のナビゲーション装置。
【請求項7】
前記特殊車両検出手段は、車車間通信により前記特殊車両の前記位置を検出することを特徴とする請求項1〜6のいずれか一項に記載のナビゲーション装置。
【請求項8】
前記特殊車両検出手段は、音響認識により前記特殊車両の前記位置を検出することを特徴とする請求項1〜6のいずれか一項に記載のナビゲーション装置。
【請求項9】
自車の走行レーンを検出する自車走行レーン検出段階と、
特殊車両の前記自車に対する位置を検出する特殊車両検出段階と、
前記自車の前記走行レーンと前記特殊車両の前記位置とに対応する自車の回避案内を判定する回避案内判定段階と、
前記回避案内を出力する案内段階と、
を含むことを特徴とするナビゲーション方法。
【請求項10】
自車の道路網上の位置を検出する自車位置検出段階と、
前記自車の目的地を設定する目的地設定段階と、
前記自車の前記位置と前記自車の目的地とに対応する推奨経路を探索する経路探索段階と、
特殊車両の道路網上の位置及び走行レーンを検出する特殊車両検出段階と、
前記推奨経路と前記特殊車両の前記位置と前記走行レーンとに対応する前記自車の回避案内を判定する回避案内判定段階と、
前記回避案内を出力する案内段階と、
を含むことを特徴とするナビゲーション方法。
【請求項1】
自車の走行レーンを検出する自車走行レーン検出手段と、
特殊車両の前記自車に対する位置を検出する特殊車両検出手段と、
前記自車の前記走行レーンと前記特殊車両の前記位置とに対応する前記自車の回避案内を判定する回避案内判定手段と、
前記回避案内を出力する案内手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
前記特殊車両検出手段は、前記特殊車両の走行レーンを検出し、
前記回避案内判定手段は、前記特殊車両の前記走行レーンに対応する前記回避案内を判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記自車の道路網上の位置を検出する自車位置検出手段と、
前記自車の目的地を設定する目的地設定手段と、
前記自車の前記位置と前記自車の目的地とに対応する推奨経路を探索する経路探索手段とをさらに備え、
前記回避案内判定手段は、前記推奨経路に対応する前記回避案内を判定することを特徴とする請求項1〜3のいずれか一項に記載のナビゲーション装置。
【請求項4】
自車の道路網上の位置を検出する自車位置検出手段と、
前記自車の目的地を設定する目的地設定手段と、
前記自車の前記位置と前記自車の目的地とに対応する推奨経路を探索する経路探索手段と、
特殊車両の道路網上の位置及び走行レーンを検出する特殊車両検出手段と、
前記推奨経路と前記特殊車両の前記位置と前記走行レーンとに対応する前記自車の回避案内を判定する回避案内判定手段と、
前記回避案内を出力する案内手段と、
を備えることを特徴とするナビゲーション装置。
【請求項5】
近傍車両の通行状態を検出する近傍車両検出手段をさらに備え、
前記回避案内判定手段は、前記近傍車両の前記通行状態に対応する前記回避案内を判定することを特徴とする請求項1〜4のいずれか一項に記載のナビゲーション装置。
【請求項6】
前記自車の前方障害を検出する障害検出手段をさらに備え、
前記回避案内判定手段は、前記前方障害に対応する前記回避案内を判定することを特徴とする請求項1〜5のいずれか一項に記載のナビゲーション装置。
【請求項7】
前記特殊車両検出手段は、車車間通信により前記特殊車両の前記位置を検出することを特徴とする請求項1〜6のいずれか一項に記載のナビゲーション装置。
【請求項8】
前記特殊車両検出手段は、音響認識により前記特殊車両の前記位置を検出することを特徴とする請求項1〜6のいずれか一項に記載のナビゲーション装置。
【請求項9】
自車の走行レーンを検出する自車走行レーン検出段階と、
特殊車両の前記自車に対する位置を検出する特殊車両検出段階と、
前記自車の前記走行レーンと前記特殊車両の前記位置とに対応する自車の回避案内を判定する回避案内判定段階と、
前記回避案内を出力する案内段階と、
を含むことを特徴とするナビゲーション方法。
【請求項10】
自車の道路網上の位置を検出する自車位置検出段階と、
前記自車の目的地を設定する目的地設定段階と、
前記自車の前記位置と前記自車の目的地とに対応する推奨経路を探索する経路探索段階と、
特殊車両の道路網上の位置及び走行レーンを検出する特殊車両検出段階と、
前記推奨経路と前記特殊車両の前記位置と前記走行レーンとに対応する前記自車の回避案内を判定する回避案内判定段階と、
前記回避案内を出力する案内段階と、
を含むことを特徴とするナビゲーション方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2006−317317(P2006−317317A)
【公開日】平成18年11月24日(2006.11.24)
【国際特許分類】
【出願番号】特願2005−141034(P2005−141034)
【出願日】平成17年5月13日(2005.5.13)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成18年11月24日(2006.11.24)
【国際特許分類】
【出願日】平成17年5月13日(2005.5.13)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]