
ナビゲーション装置
【課題】表示部において実写映像に重ねて表示される経路誘導マーク画像によって利用者が当該実写映像中の前方車両の部分に対する注意が散漫になることを防止することのできる「ナビゲーション装置」を提供することである。
【解決手段】表示部13に経路誘導マーク画像を予め定めた第1画像濃度にて車両前方の実写映像に重ねて表示させ、経路に沿った車両運転を支援するナビゲーション装置であって、表示部13において前記経路誘導マーク画像を前記実写映像に重ねて表示させる際に、自車の前方に車両が存在する状況であるか否かを判定する前方状況判定手段(S12)と、自車の前方に車両が存在する状況であると判定されたときに、表示部13において前記実写映像に重ねて表示される前記経路誘導マーク画像を前記第1画像濃度より低い第2画像濃度にて調整するマーク画像濃度調整手段(S16)とを有する構成となる。
【解決手段】表示部13に経路誘導マーク画像を予め定めた第1画像濃度にて車両前方の実写映像に重ねて表示させ、経路に沿った車両運転を支援するナビゲーション装置であって、表示部13において前記経路誘導マーク画像を前記実写映像に重ねて表示させる際に、自車の前方に車両が存在する状況であるか否かを判定する前方状況判定手段(S12)と、自車の前方に車両が存在する状況であると判定されたときに、表示部13において前記実写映像に重ねて表示される前記経路誘導マーク画像を前記第1画像濃度より低い第2画像濃度にて調整するマーク画像濃度調整手段(S16)とを有する構成となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両前方を撮影するカメラにて得られる実写映像(Augmented Reality)に、直進、左折、右折等の走行経路を指示する経路誘導マーク画像を重ねて表示し、経路に沿った車両運転を支援するナビゲーション装置に関する。
【背景技術】
【0002】
従来、特許文献1に開示されるナビゲーション装置が知られている。このナビゲーション装置では、表示部において車両前方を撮影するカメラにて得られる実写映像に経路誘導矢印(走行経路を指示する経路誘導マーク画像)が重ねて表示される。これにより、利用者(車両運転者)は、表示部に表示された実写映像を見つつ、それに重ねて表示される経路誘導矢印に従って、例えば、交差点での左折、右折等の運転操作を行うことができる。
【0003】
この従来のナビゲーション装置では、更に、自車の前方に別の車両が存在する場合、実写映像において前方車両部分にて遮断され難い画面上部に経路誘導矢印を表示させることにより、実写映像上において前方車両の部分と経路誘導矢印との重なりを少なくして、分かりやすい経路案内を可能にしている。また、前記特許文献1は、自車の前方に別の車両が存在する場合、経路誘導矢印の背景色を考慮して当該経路誘導矢印の色を視認しやすい色に変更することも提案している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2011−47649号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前述した特許文献1に開示される技術は、表示部において車両前方を撮影するカメラにて得られる実写映像に経路誘導矢印を重ねて表示させて経路に沿った運転操作を支援するナビゲーション装置において、経路誘導矢印を、実写映像中の前方車両の部分に邪魔されることなく、できるだけ視認性良く実写映像に重ねて表示させようとするものである。
【0006】
しかしながら、このように実写映像中の前方車両の部分に邪魔されることなく、視認性良く経路誘導矢印を表示させるようにすると、利用者(運転者)の注意がその視認性の良い経路誘導矢印に向けられ易くなり、かえって実写映像中の前方車両の部分に対する注意が散漫になるおそれがある。
【0007】
本発明は、このような事情に鑑みてなされたものであり、表示部において実写映像に重ねて表示される経路誘導マーク画像によって利用者が当該実写映像中の前方車両の部分に対する注意が散漫になることを防止することのできるナビゲーション装置を提供するものである。
【課題を解決するための手段】
【0008】
本発明に係るナビゲーション装置は、車両前方を撮影するカメラにて得られる実写映像を表示する表示部に走行経路を指示する経路誘導マーク画像を予め定めた第1画像濃度にて当該実写映像に重ねて表示させ、経路に沿った車両運転を支援するナビゲーション装置であって、前記表示部において前記経路誘導マーク画像を前記実写映像に重ねて表示させる際に、自車の前方に車両が存在する状況であるか否かを判定する前方状況判定手段と、該前方状況判定手段により自車の前方に車両が存在する状況であると判定されたときに、前記表示部において前記実写映像に重ねて表示される前記経路誘導マーク画像を前記第1画像濃度より低い第2画像濃度にて調整するマーク画像濃度調整手段とを有する構成となる。
【0009】
このような構成により、表示部において車両前方を撮影するカメラにて得られる実写映像に重ねて経路誘導マーク画像を表示させる際に、自車の前方に車両が存在する状況であると、前記実写映像に重ねて表示される経路誘導マーク画像が第1画像濃度からそれより低い第2画像濃度に調整される。
【0010】
第2画像濃度が第1画像濃度より低いとは、経路誘導マーク画像が下地画像を完全に遮蔽するもの(不透明)であれば、その色の濃さの程度の低さで表すことができ、経路誘導マーク画像が下地画像をある比率(透過率)をもって透過するものであれば、当該経路誘導マーク画像の透過率の高さで表すことができる。
【0011】
本発明に係るナビゲーション装置において、前記前方状況判定手段は、前記表示部において自車の前方の交差点における走行経路を指示する経路誘導マーク画像を前記実写映に重ねて表示させる際に、前記交差点と自車との間に車両が存在する状況であるか否かを判定する構成とすることができる。
【0012】
このような構成により、表示部において車両前方を撮影するカメラにて得られる実写映像に重ねて自車の前方の交差点における走行経路(例えば、左折経路、右折経路、直進経路等)を指示する経路誘導マーク画像を表示させる際に、自車と交差点との間に車両が存在する状況であると、前記実写映像に重ねて表示される前記経路誘導マーク画像が第1画像濃度からそれより低い第2画像濃度に調整される。
【0013】
また、本発明に係るナビゲーション装置において、自車が走行中であるか否かを判定する走行判定手段を有し、前記マーク画像濃度調整手段は、前記走行判定手段により自車が走行中でないと判定されたときに、前記前方状況判定手段により自車の前方に車両が存在する状況であると判定されたとしても、前記表示部において前記実写映像に重ねて表示される前記経路誘導マーク画像を前記第1画像濃度に維持するマーク画像濃度維持手段を有する構成とすることができる。
【0014】
このような構成により、自車が走行中でない場合には、自車の前方の車両が存在する状況であっても、表示部において経路誘導指示マーク画像が第1画像濃度より低い第2画像濃度ではなく、第1画像濃度に維持される。
【0015】
また、本発明に係るナビゲーション装置において、前記交差点と自車の前方に存在する前記車両と自車との間の距離を測定する距離測定手段を有し、前記マーク画像濃度調整手段は、前記表示部において前記実写映像に重ねて表示される前記経路誘導マーク画像の前記第2画像濃度を前記距離測定手段にて測定される距離が小さくなるほど低くなるように調整する距離応答マーク画像濃度手段を有する構成とすることができる。
【0016】
このような構成により、自車と前方の車両との距離が小さくなるほど、即ち、自車が前方の車両に近づくほど、表示部において実写映像に重ねて表示される経路誘導マーク画像の画像濃度(第2画像濃度)がより低くなるように調整される。
【発明の効果】
【0017】
本発明に係るナビゲーション装置によれば、表示部において車両前方を撮影するカメラにて得られる実写映像に重ねて経路誘導マーク画像を表示させる際に、自車の前方に車両が存在する状況であると、前記実写映像に重ねて表示される経路誘導マーク画像が第1画像濃度からそれより低い第2画像濃度に調整されるので、前記実写映像に重ねて表示される経路誘導マーク画像によって利用者が当該実写映像中の前方車両の部分に対する注意が散漫になることを防止することができる。
【図面の簡単な説明】
【0018】
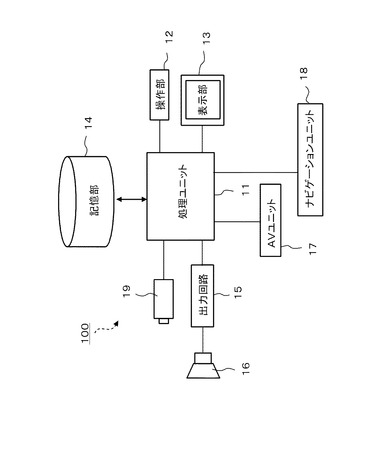
【図1】本発明の実施の一形態に係るナビゲーション装置が適用される車載装置の基本的な構成を示すブロック図である。
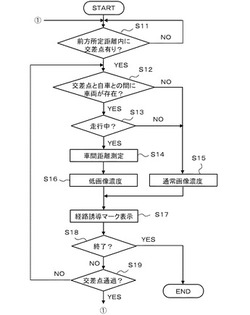
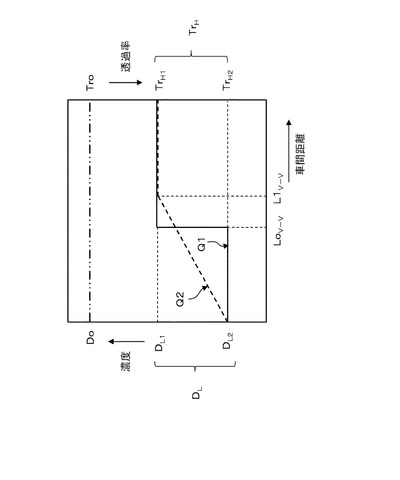
【図2】図1に示す車載装置における処理ユニットによる表示に係る処理の手順を示すフローチャートである。
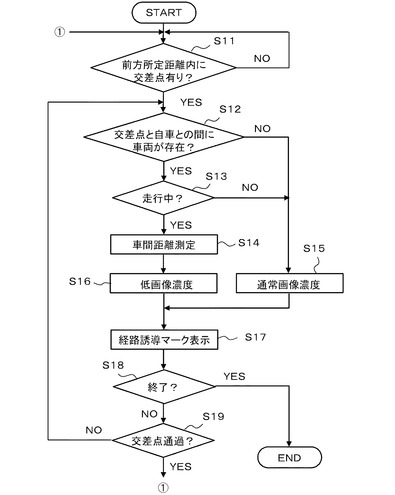
【図3】前方車両と自車との間の車間距離と表示部に実写映像に重ねて表示される経路誘導マーク画像の濃度(透過率)との関係を示す図である。
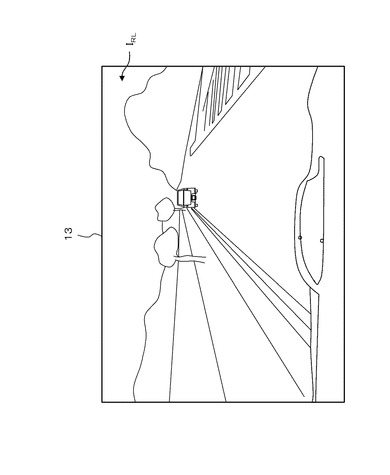
【図4】表示部に表示される実写映像の一例を示す図である。
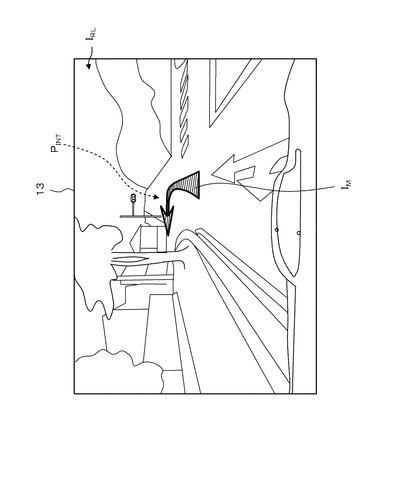
【図5】表示部において実写映像に経路誘導マーク画像(左折経路誘導マーク)が重ねて表示された状態(その1)を示す図である。
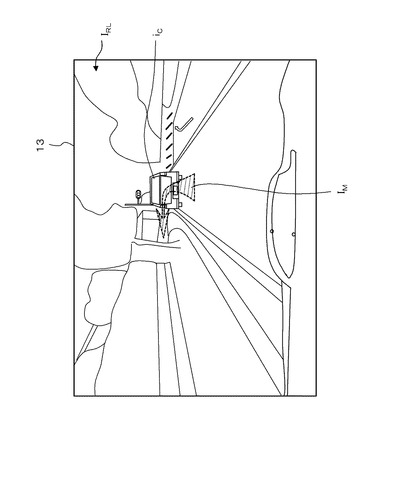
【図6】表示部において実写映像に経路誘導マーク画像(左折経路誘導マーク)が重ねて表示された状態(その2)を示す図である。
【図7】表示部において実写映像に経路誘導マーク画像(左折経路誘導マーク)が重ねて表示された状態(その3)を示す図である。
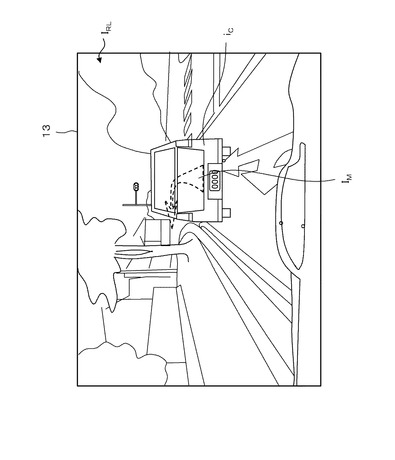
【図8】表示部において実写映像に経路誘導マーク画像(左折経路誘導マーク)が重ねて表示された状態(その4)を示す図である。
【図9】表示部において実写映像に経路誘導マーク画像(左折経路誘導マーク)が重ねて表示された状態(その5)を示す図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施の一形態について説明する。
【0020】
本発明の実施の一形態に係るナビゲーション装置が適用される車載装置は、図1に示すように構成される。
【0021】
図1において、車載装置100は、コンピュータユニット(CPUを含む)にて構成される処理ユニット11を有しており、処理ユニット11には、CDやDVD等のディスク媒体から音楽や映像を再生するAVユニット17及び車両ナビゲーション処理を行うナビゲーションユニット18が接続されている。また、処理ユニット11には、AVユニット17にて利用される情報、ナビゲーションユニット18にて利用される情報(地図情報、施設情報等)、及びその他各種情報を記憶するための記憶部14(例えば、ハードディスク)、車室内に設けられ、LCD等により構成される表示部13、操作ボタンや表示部13内に構成されるタッチパネル等からなる操作部12、及び車室内に設けられたスピーカ16に音声信号を供給する出力回路15が接続されている。更に、処理ユニット11には、車室内から車両前方を撮影するカメラ19が接続されており、処理ユニット11は、カメラ19からの映像信号に基づいて車両前方の実写映像を表示部13に表示させることができる。
【0022】
なお、表示部13は、車室内のインストルメントパネルに設けられるLCD等の表示パネルにて構成されたものであっても、また、車室内の前方所定位置に設けられるスクリーンで構成されるものであってもよい。
【0023】
上記のような構成の車載装置100では、処理ユニット11の制御のもとにナビゲーションユニット18が実行する車両ナビゲーション処理により得られる情報に基づいて、表示部13に車両前方を撮影するカメラ19にて得られる実写映像に重ねて走行経路を指示する経路誘導マーク画像(左折経路誘導マーク画像、右折経路誘導マーク画像、直進経路誘導マーク画像等)が表示され、各種の案内音声が出力回路15を介してスピーカ16から出力される。このような車両ナビゲーション処理によって運転者に対する車両運転支援がなされる。
【0024】
処理ユニット11は、上記ナビゲーション処理において、図2に示す手順に従って表示に係る処理を実行する。
【0025】
処理ユニット11は、例えば、図4に示すように、車両前方を撮影するカメラ19にて得られる実写映像IRLを表示部13に表示させる。この状態で、処理ユニット11は、自車位置情報及び道路地図情報に基づいて、自車の前方所定距離内に交差点があるか否かを判定している(S11)。自車の前方所定距離内に交差点があると判定すると(S11でYES)、処理ユニット11は、更に、カメラ19から得られる実写映像IRLに基づいて前方の交差点と自車との間に車両が存在する状況であるか否かを判定する(S12)。
【0026】
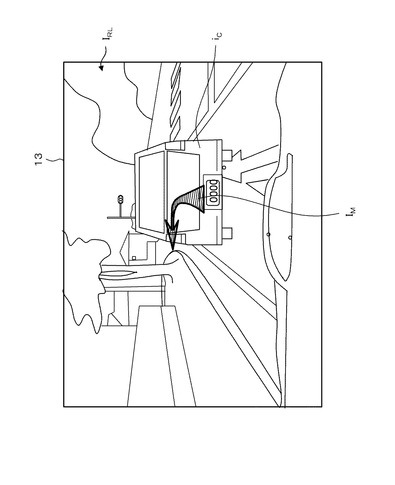
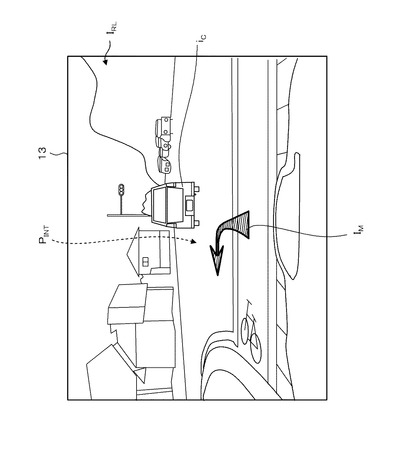
前方交差点と自車との間に車両が存在する状況ではないと判定すると(S12でNO)、処理ユニット11は、ナビゲーション処理により設定された走行経路情報に基づいて前記交差点での走行経路を判定し、その判定にて得られた走行経路(例えば、左折経路)を指示する経路誘導マーク画像(例えば、左折経路誘導マーク画像)の画像濃度(画像透過率)を通常画像濃度Do(通常画像透過率Tro)(第1画像濃度)に決定する(S15)。そして、処理ユニット11は、例えば、図5に示すように、交差点PINTでの走行経路を指示する経路誘導マーク画像(左折経路誘導マーク画像)IMを前記決定された通常画像濃度Do(通常画像透過率Tro)にて前記実写映像IRLに重ねて表示部13に表示させる(S17)。
【0027】
その後、処理ユニット11は、所定の終了操作がなされたか否か(S18)及び自車が前記交差点を通過したか否かを判定(S19)しつつ、前述した処理(S12、S15、S17)を繰り返し実行する。この場合、利用者(運転者)は、表示部13において実写映像IRLに重ねて通常画像濃度Do(通常画像透過率Tro)にて表示される経路誘導マーク画像(左折経路誘導マーク画像)IMにより次の交差点での走行経路(左折経路)を認識しつつ当該交差点に向けての運転操作を続ける。
【0028】
一方、前方の交差点と自車との間に車両が存在する状況であると判定すると(S12でYES)、処理ユニット11は、更に、自車が走行中であるか否か(S13)を判定する。自車が走行中であると判定すると(S13でYES)、処理ユニット11は、自車と前方車両との車間距離LV−Vを測定する(S14)。車間距離LV−Vは、レーダーを用いて測定することもできるが、レーダーを用いることなく、カメラ19の撮影条件及び得られる実写映像IRL中の車両のナンバープレート部分の大きさに基づいて演算することもできる。
【0029】
自車と前方車両との車間距離LV−Vが得られると、処理ユニット11は、前記実写映像IRLに重ねて表示される前記経路誘導マーク画像IMの画像濃度を前記通常画像濃度Doより低い低画像濃度DL(前記通常画像透過率Troより高い高画像透過率TrH)(第2画像濃度)に決定する(S16)。例えば、図3に示す予め定めた車間距離LV−Vと画像濃度(画像透過率)との関係Q1(2段階調整用)に従って、得られた車間距離LV−Vが所定車間距離L0V−V以上であれば、通常画像濃度Doより低い第1低画像濃度DL1(通常画像透過率Troより高い第1高画像透過率TrH1)に決められる。また、得られた車間距離LV−Vが所定車間距離L0V−V未満であれば、前記通常画像濃度Doより低く、更に前記第1低画像濃度DL1より低い第2低画像濃度DL2(通常画像透過率Troより高く、更に前記第1高画像透過率TrH1より高い第2高画像透過率TrH2)に決められる。そして、処理ユニット11は、経路誘導マーク画像(左折経路誘導マーク画像)IMをその決められた低画像濃度DL(高画像透過率TrH)にて前記実写映像IRLに重ねて表示部13に表示させる(S17)。
【0030】
例えば、前記測定された車間距離LV−Vが前記所定車間距離L0V−V以上である場合、図6に示すように、表示部13において前方車両の画像部分を含む実写映像IRLに重ねて経路誘導マーク画像(左折経路誘導マーク画像)IMが通常画像濃度Doより低い第1画像濃度DL1(通常画像透過率Troより高い第1高画像透過率TrH1)にて表示される。この場合、利用者(運転者)は、表示部13において前方車両の画像部分を含む実写映像IRLに第1低画像濃度DL1(第1高画像透過率TrH1)にて表示される比較的薄い経路誘導マーク画像(左折経路誘導マーク画像)IMにより次の交差点での走行経路(左折経路)を認識しつつ当該交差点に向けての運転操作を続ける。
【0031】
また、自車が前方車両に近づいて、例えば、前記測定された車間距離LV−Vが前記所定車間距離L0V−V未満である場合、図7に示すように、表示部13において前方車両の画像部分を含む実写映像IRLに重ねて経路誘導マーク画像(左折経路誘導マーク画像)IMが前記第1低画像濃度DL1より更に低い第2低画像濃度DL2(前記第1高画像透過率TRH1より更に高い第2高画像透過率TRH2)にて表示される。この場合、利用者(運転者)は、表示部13において前方車両の画像部分を含む実写映像IRLに第2低画像濃度DL1(第2高画像透過率TRH2)にて表示される更に薄い経路誘導マーク画像(左折経路誘導マーク画像)IMにより次の交差点での走行経路(左折経路)を認識しつつ当該交差点に向けての運転操作を続ける。
【0032】
以後、処理ユニット11は、所定の終了操作がなされたか否か(S18)及び自車が前記交差点を通過したか否か(S19)を判定しつつ、同様の処理(S12、S13、S14、S16、S17)を実行する。これにより、表示部13には、前方車両との車間距離LV−Vに応じて決められる(2段階調整)通常画像濃度Doより低い低画像濃度DL(DL1、DL2)(通常画像透過率Troより高い高画像透過率TrH(TrH1、TrH2))にて経路誘導マーク画像IMが自車前方の実写映像IRLに重ねて表示される。
【0033】
上述した処理の過程で、自車が走行中ではない(停止している)と判定すると(S13でNO)、処理ユニット11は、交差点と自車との間に車両が存在していても(S12でYES)、経路誘導マークIMの画像濃度を通常画像濃度Do(通常画像透過率Tro)に決定し(S15)、例えば、図8に示すように、経路誘導マーク画像IMをその決定した通常画像濃度Do(通常画像透過率Tro)にて前記実写映像IRLに重ねて表示部13に表示させる(S17)。また、前方車両が交差点を通過することにより、交差点PINTと自車との間に車両が存在する状況でなくなった場合も(S12でNO)、処理ユニット11は、前述したように経路誘導マークIMの画像濃度を通常画像濃度Do(通常画像透過率Tro)に決定し、例えば、図9示すように、経路誘導マーク画像IMをその決定した通常画像濃度Do(通常画像透過率Tro)にて前記実写映像IRLに重ねて表示部13に表示させる(S17)。
【0034】
なお、上述した処理において、自車が交差点を通過したと判定すると(S19でYES)、処理ユニット11は、再び、自車の前方所定距離内に交差点があるか否かの監視(S11)を開始する。そして、自車の前方所定距離内に交差点があると判定すると、処理ユニット11は、前述したのと同様の処理(S12〜S19)を実行し、当該交差点での走行経路を指示する経路誘導マーク画像IMの画像濃度(画像透過率)を調整しつつ(通常画像濃度Do(通常画像透過率Tro)、低画像濃度DL(高画像透過率TrH))、その経路画像誘導マークIMを自車の前方の実写映像IRLに重ねて表示させる(図5〜図9参照)。
【0035】
前述した処理において、所定の終了操作がなされると、処理ユニット11は、表示に係る処理を終了させる(END)。
【0036】
本発明の実施の形態に係るナビゲーション装置では、表示部13において車両前方の実写映像IRLに重ねて自車の前方の交差点における走行経路(例えば、左折経路、右折経路、直進経路等)を指示する経路誘導マーク画像IMを表示させる際に、当該交差点と自車との間に車両が存在する状況であると、前記実写映像IRLに重ねて表示される経路誘導マーク画像IMが通常画像濃度Doより低い低画像濃度DL(通常画像透過率Troより高い高画像透過率TrH)に調整される。このように、前方の車両部分を含む実写映像IRLに重ねて表示される経路誘導マーク画像IMが低い画像濃度(高い画像透過率)に調整されて比較的目立ち難くなるので、利用者(運転者)が、経路誘導マーク画像IMによって当該実写映像IRL中の前方車両の部分に対する注意が散漫になってしまうことを防止することできる。
【0037】
更に、自車の前方に車両が存在する状況において、前方との車間距離が小さいほど、実写映像IRLに重ねて表示される経路誘導マーク画像IMの画像濃度が小さく(画像透過率が大きく)なるように2段階(図3における関係Q1参照)で調整されるので、車間距離が小さく、特に、前方車両に注意をはらわなければならない状況で、経路誘導マーク画像IMの画像濃度がより小さく(画像透過率がより大きく)なる。このため、車間距離が小さく、特に、前方車両に注意をはらわなければならない状況で、利用者(運転者)が、経路誘導マーク画像IMによって当該実写映像IRL中の前方車両の部分に対する注意が散漫になってしまうことをより的確に防止することができる。
【0038】
前述した例では、経路誘導マーク画像IMの画像濃度(画像透過率)は、前方車両との車間距離LV−Vに応じて2段階(第1低画像濃度DL1と第2低画像濃度DL2(第1高画像透過率TrH1と第2高画像透過率TrH2))に調整されたが、図3に示す車間距離LV−Vと画像濃度(画像透過率)との関係Q2のように、前方車両との車間距離LV−Vに応じて連続的(無段階)に経路誘導マーク画像IMの画像濃度(画像透過率)を調整するようにしてもよい。なお、図3に示す関係Q2に従う場合、車間距離LV−Vが所定車間距離(L1V−V)未満では、車間距離LV−Vに応じて画像濃度が第2低画像濃度DL2と第1低画像濃度DL1との間で連続的に調整され(画像透過率が車間距離LV−Vに応じて第2高画像透過率TrH2と第1高画像透過率TrH1との間で連続的に調整され)、車間距離LV−Vが所定距離L1V−V以上では、画像濃度が第1画像濃度DL1(画像透過率が第1高画像透過率TrH1)に維持される。
【0039】
なお、車間距離LV−Vと経路誘導マーク画像IMの画像濃度との関係は、図3に示す関係Q1(2段階調整)や関係Q2(無段階調整)に限られず、車間距離LV−Vが小さくなるほど経路誘導マーク画像IMの画像濃度が小さく(画像透過率が大きく)なる傾向を有する関係であれば、任意に決めることができる。
【0040】
また、交差点以外の地点において経路誘導マーク画像IMを表示する際にも、前述した当該経路誘導マーク画像IMの画像濃度(画像透過率)の手法を適用することができる。
【産業上の利用可能性】
【0041】
本発明に係るナビゲーション装置は、表示部において実写映像に重ねて表示される経路誘導マーク画像によって利用者が当該実写映像中の前方車両の部分に対する注意が散漫になることを防止することができるという効果を有し、車両前方を撮影するカメラにて得られる実写映像(Augmented Reality)に、直進、左折、右折等の走行経路を指示する経路誘導マーク画像を重ねて表示し、経路に沿った車両運転を支援するナビゲーション装置として有用である。
【符号の説明】
【0042】
11 処理ユニット
12 操作部
13 表示部
14 記憶部
15 出力回路
16 スピーカ
17 AVユニット
18 ナビゲーションユニット
19 カメラ
【技術分野】
【0001】
本発明は、車両前方を撮影するカメラにて得られる実写映像(Augmented Reality)に、直進、左折、右折等の走行経路を指示する経路誘導マーク画像を重ねて表示し、経路に沿った車両運転を支援するナビゲーション装置に関する。
【背景技術】
【0002】
従来、特許文献1に開示されるナビゲーション装置が知られている。このナビゲーション装置では、表示部において車両前方を撮影するカメラにて得られる実写映像に経路誘導矢印(走行経路を指示する経路誘導マーク画像)が重ねて表示される。これにより、利用者(車両運転者)は、表示部に表示された実写映像を見つつ、それに重ねて表示される経路誘導矢印に従って、例えば、交差点での左折、右折等の運転操作を行うことができる。
【0003】
この従来のナビゲーション装置では、更に、自車の前方に別の車両が存在する場合、実写映像において前方車両部分にて遮断され難い画面上部に経路誘導矢印を表示させることにより、実写映像上において前方車両の部分と経路誘導矢印との重なりを少なくして、分かりやすい経路案内を可能にしている。また、前記特許文献1は、自車の前方に別の車両が存在する場合、経路誘導矢印の背景色を考慮して当該経路誘導矢印の色を視認しやすい色に変更することも提案している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2011−47649号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前述した特許文献1に開示される技術は、表示部において車両前方を撮影するカメラにて得られる実写映像に経路誘導矢印を重ねて表示させて経路に沿った運転操作を支援するナビゲーション装置において、経路誘導矢印を、実写映像中の前方車両の部分に邪魔されることなく、できるだけ視認性良く実写映像に重ねて表示させようとするものである。
【0006】
しかしながら、このように実写映像中の前方車両の部分に邪魔されることなく、視認性良く経路誘導矢印を表示させるようにすると、利用者(運転者)の注意がその視認性の良い経路誘導矢印に向けられ易くなり、かえって実写映像中の前方車両の部分に対する注意が散漫になるおそれがある。
【0007】
本発明は、このような事情に鑑みてなされたものであり、表示部において実写映像に重ねて表示される経路誘導マーク画像によって利用者が当該実写映像中の前方車両の部分に対する注意が散漫になることを防止することのできるナビゲーション装置を提供するものである。
【課題を解決するための手段】
【0008】
本発明に係るナビゲーション装置は、車両前方を撮影するカメラにて得られる実写映像を表示する表示部に走行経路を指示する経路誘導マーク画像を予め定めた第1画像濃度にて当該実写映像に重ねて表示させ、経路に沿った車両運転を支援するナビゲーション装置であって、前記表示部において前記経路誘導マーク画像を前記実写映像に重ねて表示させる際に、自車の前方に車両が存在する状況であるか否かを判定する前方状況判定手段と、該前方状況判定手段により自車の前方に車両が存在する状況であると判定されたときに、前記表示部において前記実写映像に重ねて表示される前記経路誘導マーク画像を前記第1画像濃度より低い第2画像濃度にて調整するマーク画像濃度調整手段とを有する構成となる。
【0009】
このような構成により、表示部において車両前方を撮影するカメラにて得られる実写映像に重ねて経路誘導マーク画像を表示させる際に、自車の前方に車両が存在する状況であると、前記実写映像に重ねて表示される経路誘導マーク画像が第1画像濃度からそれより低い第2画像濃度に調整される。
【0010】
第2画像濃度が第1画像濃度より低いとは、経路誘導マーク画像が下地画像を完全に遮蔽するもの(不透明)であれば、その色の濃さの程度の低さで表すことができ、経路誘導マーク画像が下地画像をある比率(透過率)をもって透過するものであれば、当該経路誘導マーク画像の透過率の高さで表すことができる。
【0011】
本発明に係るナビゲーション装置において、前記前方状況判定手段は、前記表示部において自車の前方の交差点における走行経路を指示する経路誘導マーク画像を前記実写映に重ねて表示させる際に、前記交差点と自車との間に車両が存在する状況であるか否かを判定する構成とすることができる。
【0012】
このような構成により、表示部において車両前方を撮影するカメラにて得られる実写映像に重ねて自車の前方の交差点における走行経路(例えば、左折経路、右折経路、直進経路等)を指示する経路誘導マーク画像を表示させる際に、自車と交差点との間に車両が存在する状況であると、前記実写映像に重ねて表示される前記経路誘導マーク画像が第1画像濃度からそれより低い第2画像濃度に調整される。
【0013】
また、本発明に係るナビゲーション装置において、自車が走行中であるか否かを判定する走行判定手段を有し、前記マーク画像濃度調整手段は、前記走行判定手段により自車が走行中でないと判定されたときに、前記前方状況判定手段により自車の前方に車両が存在する状況であると判定されたとしても、前記表示部において前記実写映像に重ねて表示される前記経路誘導マーク画像を前記第1画像濃度に維持するマーク画像濃度維持手段を有する構成とすることができる。
【0014】
このような構成により、自車が走行中でない場合には、自車の前方の車両が存在する状況であっても、表示部において経路誘導指示マーク画像が第1画像濃度より低い第2画像濃度ではなく、第1画像濃度に維持される。
【0015】
また、本発明に係るナビゲーション装置において、前記交差点と自車の前方に存在する前記車両と自車との間の距離を測定する距離測定手段を有し、前記マーク画像濃度調整手段は、前記表示部において前記実写映像に重ねて表示される前記経路誘導マーク画像の前記第2画像濃度を前記距離測定手段にて測定される距離が小さくなるほど低くなるように調整する距離応答マーク画像濃度手段を有する構成とすることができる。
【0016】
このような構成により、自車と前方の車両との距離が小さくなるほど、即ち、自車が前方の車両に近づくほど、表示部において実写映像に重ねて表示される経路誘導マーク画像の画像濃度(第2画像濃度)がより低くなるように調整される。
【発明の効果】
【0017】
本発明に係るナビゲーション装置によれば、表示部において車両前方を撮影するカメラにて得られる実写映像に重ねて経路誘導マーク画像を表示させる際に、自車の前方に車両が存在する状況であると、前記実写映像に重ねて表示される経路誘導マーク画像が第1画像濃度からそれより低い第2画像濃度に調整されるので、前記実写映像に重ねて表示される経路誘導マーク画像によって利用者が当該実写映像中の前方車両の部分に対する注意が散漫になることを防止することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施の一形態に係るナビゲーション装置が適用される車載装置の基本的な構成を示すブロック図である。
【図2】図1に示す車載装置における処理ユニットによる表示に係る処理の手順を示すフローチャートである。
【図3】前方車両と自車との間の車間距離と表示部に実写映像に重ねて表示される経路誘導マーク画像の濃度(透過率)との関係を示す図である。
【図4】表示部に表示される実写映像の一例を示す図である。
【図5】表示部において実写映像に経路誘導マーク画像(左折経路誘導マーク)が重ねて表示された状態(その1)を示す図である。
【図6】表示部において実写映像に経路誘導マーク画像(左折経路誘導マーク)が重ねて表示された状態(その2)を示す図である。
【図7】表示部において実写映像に経路誘導マーク画像(左折経路誘導マーク)が重ねて表示された状態(その3)を示す図である。
【図8】表示部において実写映像に経路誘導マーク画像(左折経路誘導マーク)が重ねて表示された状態(その4)を示す図である。
【図9】表示部において実写映像に経路誘導マーク画像(左折経路誘導マーク)が重ねて表示された状態(その5)を示す図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施の一形態について説明する。
【0020】
本発明の実施の一形態に係るナビゲーション装置が適用される車載装置は、図1に示すように構成される。
【0021】
図1において、車載装置100は、コンピュータユニット(CPUを含む)にて構成される処理ユニット11を有しており、処理ユニット11には、CDやDVD等のディスク媒体から音楽や映像を再生するAVユニット17及び車両ナビゲーション処理を行うナビゲーションユニット18が接続されている。また、処理ユニット11には、AVユニット17にて利用される情報、ナビゲーションユニット18にて利用される情報(地図情報、施設情報等)、及びその他各種情報を記憶するための記憶部14(例えば、ハードディスク)、車室内に設けられ、LCD等により構成される表示部13、操作ボタンや表示部13内に構成されるタッチパネル等からなる操作部12、及び車室内に設けられたスピーカ16に音声信号を供給する出力回路15が接続されている。更に、処理ユニット11には、車室内から車両前方を撮影するカメラ19が接続されており、処理ユニット11は、カメラ19からの映像信号に基づいて車両前方の実写映像を表示部13に表示させることができる。
【0022】
なお、表示部13は、車室内のインストルメントパネルに設けられるLCD等の表示パネルにて構成されたものであっても、また、車室内の前方所定位置に設けられるスクリーンで構成されるものであってもよい。
【0023】
上記のような構成の車載装置100では、処理ユニット11の制御のもとにナビゲーションユニット18が実行する車両ナビゲーション処理により得られる情報に基づいて、表示部13に車両前方を撮影するカメラ19にて得られる実写映像に重ねて走行経路を指示する経路誘導マーク画像(左折経路誘導マーク画像、右折経路誘導マーク画像、直進経路誘導マーク画像等)が表示され、各種の案内音声が出力回路15を介してスピーカ16から出力される。このような車両ナビゲーション処理によって運転者に対する車両運転支援がなされる。
【0024】
処理ユニット11は、上記ナビゲーション処理において、図2に示す手順に従って表示に係る処理を実行する。
【0025】
処理ユニット11は、例えば、図4に示すように、車両前方を撮影するカメラ19にて得られる実写映像IRLを表示部13に表示させる。この状態で、処理ユニット11は、自車位置情報及び道路地図情報に基づいて、自車の前方所定距離内に交差点があるか否かを判定している(S11)。自車の前方所定距離内に交差点があると判定すると(S11でYES)、処理ユニット11は、更に、カメラ19から得られる実写映像IRLに基づいて前方の交差点と自車との間に車両が存在する状況であるか否かを判定する(S12)。
【0026】
前方交差点と自車との間に車両が存在する状況ではないと判定すると(S12でNO)、処理ユニット11は、ナビゲーション処理により設定された走行経路情報に基づいて前記交差点での走行経路を判定し、その判定にて得られた走行経路(例えば、左折経路)を指示する経路誘導マーク画像(例えば、左折経路誘導マーク画像)の画像濃度(画像透過率)を通常画像濃度Do(通常画像透過率Tro)(第1画像濃度)に決定する(S15)。そして、処理ユニット11は、例えば、図5に示すように、交差点PINTでの走行経路を指示する経路誘導マーク画像(左折経路誘導マーク画像)IMを前記決定された通常画像濃度Do(通常画像透過率Tro)にて前記実写映像IRLに重ねて表示部13に表示させる(S17)。
【0027】
その後、処理ユニット11は、所定の終了操作がなされたか否か(S18)及び自車が前記交差点を通過したか否かを判定(S19)しつつ、前述した処理(S12、S15、S17)を繰り返し実行する。この場合、利用者(運転者)は、表示部13において実写映像IRLに重ねて通常画像濃度Do(通常画像透過率Tro)にて表示される経路誘導マーク画像(左折経路誘導マーク画像)IMにより次の交差点での走行経路(左折経路)を認識しつつ当該交差点に向けての運転操作を続ける。
【0028】
一方、前方の交差点と自車との間に車両が存在する状況であると判定すると(S12でYES)、処理ユニット11は、更に、自車が走行中であるか否か(S13)を判定する。自車が走行中であると判定すると(S13でYES)、処理ユニット11は、自車と前方車両との車間距離LV−Vを測定する(S14)。車間距離LV−Vは、レーダーを用いて測定することもできるが、レーダーを用いることなく、カメラ19の撮影条件及び得られる実写映像IRL中の車両のナンバープレート部分の大きさに基づいて演算することもできる。
【0029】
自車と前方車両との車間距離LV−Vが得られると、処理ユニット11は、前記実写映像IRLに重ねて表示される前記経路誘導マーク画像IMの画像濃度を前記通常画像濃度Doより低い低画像濃度DL(前記通常画像透過率Troより高い高画像透過率TrH)(第2画像濃度)に決定する(S16)。例えば、図3に示す予め定めた車間距離LV−Vと画像濃度(画像透過率)との関係Q1(2段階調整用)に従って、得られた車間距離LV−Vが所定車間距離L0V−V以上であれば、通常画像濃度Doより低い第1低画像濃度DL1(通常画像透過率Troより高い第1高画像透過率TrH1)に決められる。また、得られた車間距離LV−Vが所定車間距離L0V−V未満であれば、前記通常画像濃度Doより低く、更に前記第1低画像濃度DL1より低い第2低画像濃度DL2(通常画像透過率Troより高く、更に前記第1高画像透過率TrH1より高い第2高画像透過率TrH2)に決められる。そして、処理ユニット11は、経路誘導マーク画像(左折経路誘導マーク画像)IMをその決められた低画像濃度DL(高画像透過率TrH)にて前記実写映像IRLに重ねて表示部13に表示させる(S17)。
【0030】
例えば、前記測定された車間距離LV−Vが前記所定車間距離L0V−V以上である場合、図6に示すように、表示部13において前方車両の画像部分を含む実写映像IRLに重ねて経路誘導マーク画像(左折経路誘導マーク画像)IMが通常画像濃度Doより低い第1画像濃度DL1(通常画像透過率Troより高い第1高画像透過率TrH1)にて表示される。この場合、利用者(運転者)は、表示部13において前方車両の画像部分を含む実写映像IRLに第1低画像濃度DL1(第1高画像透過率TrH1)にて表示される比較的薄い経路誘導マーク画像(左折経路誘導マーク画像)IMにより次の交差点での走行経路(左折経路)を認識しつつ当該交差点に向けての運転操作を続ける。
【0031】
また、自車が前方車両に近づいて、例えば、前記測定された車間距離LV−Vが前記所定車間距離L0V−V未満である場合、図7に示すように、表示部13において前方車両の画像部分を含む実写映像IRLに重ねて経路誘導マーク画像(左折経路誘導マーク画像)IMが前記第1低画像濃度DL1より更に低い第2低画像濃度DL2(前記第1高画像透過率TRH1より更に高い第2高画像透過率TRH2)にて表示される。この場合、利用者(運転者)は、表示部13において前方車両の画像部分を含む実写映像IRLに第2低画像濃度DL1(第2高画像透過率TRH2)にて表示される更に薄い経路誘導マーク画像(左折経路誘導マーク画像)IMにより次の交差点での走行経路(左折経路)を認識しつつ当該交差点に向けての運転操作を続ける。
【0032】
以後、処理ユニット11は、所定の終了操作がなされたか否か(S18)及び自車が前記交差点を通過したか否か(S19)を判定しつつ、同様の処理(S12、S13、S14、S16、S17)を実行する。これにより、表示部13には、前方車両との車間距離LV−Vに応じて決められる(2段階調整)通常画像濃度Doより低い低画像濃度DL(DL1、DL2)(通常画像透過率Troより高い高画像透過率TrH(TrH1、TrH2))にて経路誘導マーク画像IMが自車前方の実写映像IRLに重ねて表示される。
【0033】
上述した処理の過程で、自車が走行中ではない(停止している)と判定すると(S13でNO)、処理ユニット11は、交差点と自車との間に車両が存在していても(S12でYES)、経路誘導マークIMの画像濃度を通常画像濃度Do(通常画像透過率Tro)に決定し(S15)、例えば、図8に示すように、経路誘導マーク画像IMをその決定した通常画像濃度Do(通常画像透過率Tro)にて前記実写映像IRLに重ねて表示部13に表示させる(S17)。また、前方車両が交差点を通過することにより、交差点PINTと自車との間に車両が存在する状況でなくなった場合も(S12でNO)、処理ユニット11は、前述したように経路誘導マークIMの画像濃度を通常画像濃度Do(通常画像透過率Tro)に決定し、例えば、図9示すように、経路誘導マーク画像IMをその決定した通常画像濃度Do(通常画像透過率Tro)にて前記実写映像IRLに重ねて表示部13に表示させる(S17)。
【0034】
なお、上述した処理において、自車が交差点を通過したと判定すると(S19でYES)、処理ユニット11は、再び、自車の前方所定距離内に交差点があるか否かの監視(S11)を開始する。そして、自車の前方所定距離内に交差点があると判定すると、処理ユニット11は、前述したのと同様の処理(S12〜S19)を実行し、当該交差点での走行経路を指示する経路誘導マーク画像IMの画像濃度(画像透過率)を調整しつつ(通常画像濃度Do(通常画像透過率Tro)、低画像濃度DL(高画像透過率TrH))、その経路画像誘導マークIMを自車の前方の実写映像IRLに重ねて表示させる(図5〜図9参照)。
【0035】
前述した処理において、所定の終了操作がなされると、処理ユニット11は、表示に係る処理を終了させる(END)。
【0036】
本発明の実施の形態に係るナビゲーション装置では、表示部13において車両前方の実写映像IRLに重ねて自車の前方の交差点における走行経路(例えば、左折経路、右折経路、直進経路等)を指示する経路誘導マーク画像IMを表示させる際に、当該交差点と自車との間に車両が存在する状況であると、前記実写映像IRLに重ねて表示される経路誘導マーク画像IMが通常画像濃度Doより低い低画像濃度DL(通常画像透過率Troより高い高画像透過率TrH)に調整される。このように、前方の車両部分を含む実写映像IRLに重ねて表示される経路誘導マーク画像IMが低い画像濃度(高い画像透過率)に調整されて比較的目立ち難くなるので、利用者(運転者)が、経路誘導マーク画像IMによって当該実写映像IRL中の前方車両の部分に対する注意が散漫になってしまうことを防止することできる。
【0037】
更に、自車の前方に車両が存在する状況において、前方との車間距離が小さいほど、実写映像IRLに重ねて表示される経路誘導マーク画像IMの画像濃度が小さく(画像透過率が大きく)なるように2段階(図3における関係Q1参照)で調整されるので、車間距離が小さく、特に、前方車両に注意をはらわなければならない状況で、経路誘導マーク画像IMの画像濃度がより小さく(画像透過率がより大きく)なる。このため、車間距離が小さく、特に、前方車両に注意をはらわなければならない状況で、利用者(運転者)が、経路誘導マーク画像IMによって当該実写映像IRL中の前方車両の部分に対する注意が散漫になってしまうことをより的確に防止することができる。
【0038】
前述した例では、経路誘導マーク画像IMの画像濃度(画像透過率)は、前方車両との車間距離LV−Vに応じて2段階(第1低画像濃度DL1と第2低画像濃度DL2(第1高画像透過率TrH1と第2高画像透過率TrH2))に調整されたが、図3に示す車間距離LV−Vと画像濃度(画像透過率)との関係Q2のように、前方車両との車間距離LV−Vに応じて連続的(無段階)に経路誘導マーク画像IMの画像濃度(画像透過率)を調整するようにしてもよい。なお、図3に示す関係Q2に従う場合、車間距離LV−Vが所定車間距離(L1V−V)未満では、車間距離LV−Vに応じて画像濃度が第2低画像濃度DL2と第1低画像濃度DL1との間で連続的に調整され(画像透過率が車間距離LV−Vに応じて第2高画像透過率TrH2と第1高画像透過率TrH1との間で連続的に調整され)、車間距離LV−Vが所定距離L1V−V以上では、画像濃度が第1画像濃度DL1(画像透過率が第1高画像透過率TrH1)に維持される。
【0039】
なお、車間距離LV−Vと経路誘導マーク画像IMの画像濃度との関係は、図3に示す関係Q1(2段階調整)や関係Q2(無段階調整)に限られず、車間距離LV−Vが小さくなるほど経路誘導マーク画像IMの画像濃度が小さく(画像透過率が大きく)なる傾向を有する関係であれば、任意に決めることができる。
【0040】
また、交差点以外の地点において経路誘導マーク画像IMを表示する際にも、前述した当該経路誘導マーク画像IMの画像濃度(画像透過率)の手法を適用することができる。
【産業上の利用可能性】
【0041】
本発明に係るナビゲーション装置は、表示部において実写映像に重ねて表示される経路誘導マーク画像によって利用者が当該実写映像中の前方車両の部分に対する注意が散漫になることを防止することができるという効果を有し、車両前方を撮影するカメラにて得られる実写映像(Augmented Reality)に、直進、左折、右折等の走行経路を指示する経路誘導マーク画像を重ねて表示し、経路に沿った車両運転を支援するナビゲーション装置として有用である。
【符号の説明】
【0042】
11 処理ユニット
12 操作部
13 表示部
14 記憶部
15 出力回路
16 スピーカ
17 AVユニット
18 ナビゲーションユニット
19 カメラ
【特許請求の範囲】
【請求項1】
車両前方を撮影するカメラにて得られる実写映像を表示する表示部に走行経路を指示する経路誘導マーク画像を予め定めた第1画像濃度にて当該実写映像に重ねて表示させ、経路に沿った車両運転を支援するナビゲーション装置であって、
前記表示部において前記経路誘導マーク画像を前記実写映像に重ねて表示させる際に、自車の前方に車両が存在する状況であるか否かを判定する前方状況判定手段と、
該前方状況判定手段により自車の前方に車両が存在する状況であると判定されたときに、前記表示部において前記実写映像に重ねて表示される前記経路誘導マーク画像を前記第1画像濃度より低い第2画像濃度にて調整するマーク画像濃度調整手段とを有するナビゲーション装置。
【請求項2】
前記前方状況判定手段は、前記表示部において自車の前方の交差点における走行経路を指示する経路誘導マーク画像を前記実写映に重ねて表示させる際に、前記交差点と自車との間に車両が存在する状況であるか否かを判定する請求項1記載のナビゲーション装置。
【請求項3】
自車が走行中であるか否かを判定する走行判定手段を有し、
前記マーク画像濃度調整手段は、前記走行判定手段により自車が走行中でないと判定されたときに、前記前方状況判定手段により自車の前方に車両が存在する状況であると判定されたとしても、前記表示部において前記実写映像に重ねて表示される前記経路誘導マーク画像を前記第1画像濃度に維持するマーク画像濃度維持手段を有する請求項1または2記載のナビゲーション装置。
【請求項4】
前記交差点と自車の前方に存在する前記車両と自車との間の距離を測定する距離測定手段を有し、
前記マーク画像濃度調整手段は、前記表示部において前記実写映像に重ねて表示される前記経路誘導マーク画像の前記第2画像濃度を前記距離測定手段にて測定される距離が小さくなるほど低くなるように調整する距離応答マーク画像濃度手段を有する請求項1乃至3のいずれかに記載のナビゲーション装置。
【請求項1】
車両前方を撮影するカメラにて得られる実写映像を表示する表示部に走行経路を指示する経路誘導マーク画像を予め定めた第1画像濃度にて当該実写映像に重ねて表示させ、経路に沿った車両運転を支援するナビゲーション装置であって、
前記表示部において前記経路誘導マーク画像を前記実写映像に重ねて表示させる際に、自車の前方に車両が存在する状況であるか否かを判定する前方状況判定手段と、
該前方状況判定手段により自車の前方に車両が存在する状況であると判定されたときに、前記表示部において前記実写映像に重ねて表示される前記経路誘導マーク画像を前記第1画像濃度より低い第2画像濃度にて調整するマーク画像濃度調整手段とを有するナビゲーション装置。
【請求項2】
前記前方状況判定手段は、前記表示部において自車の前方の交差点における走行経路を指示する経路誘導マーク画像を前記実写映に重ねて表示させる際に、前記交差点と自車との間に車両が存在する状況であるか否かを判定する請求項1記載のナビゲーション装置。
【請求項3】
自車が走行中であるか否かを判定する走行判定手段を有し、
前記マーク画像濃度調整手段は、前記走行判定手段により自車が走行中でないと判定されたときに、前記前方状況判定手段により自車の前方に車両が存在する状況であると判定されたとしても、前記表示部において前記実写映像に重ねて表示される前記経路誘導マーク画像を前記第1画像濃度に維持するマーク画像濃度維持手段を有する請求項1または2記載のナビゲーション装置。
【請求項4】
前記交差点と自車の前方に存在する前記車両と自車との間の距離を測定する距離測定手段を有し、
前記マーク画像濃度調整手段は、前記表示部において前記実写映像に重ねて表示される前記経路誘導マーク画像の前記第2画像濃度を前記距離測定手段にて測定される距離が小さくなるほど低くなるように調整する距離応答マーク画像濃度手段を有する請求項1乃至3のいずれかに記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−108852(P2013−108852A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254374(P2011−254374)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]