
ナビゲーション装置
【課題】屋内送信機から送信された位置情報を受信した際にも、精度良くユーザーに違和感の少ない現在位置を表示できるナビゲーション装置を提供する。
【解決手段】GPS受信機1が算出した位置がGPS衛星を受信して算出した位置なのか、屋内送信機から送信される位置情報を受信したのか判定するGPS種別判定部21と、GPS受信機1からの位置情報および方位検出装置3で算出される方位と、速度検出装置4で算出される速度と、記憶装置5で記憶される地図データベースを用いて位置を決定する測位部23と、屋内送信機から送信される位置情報について、その位置情報が示す場所を走行した時刻を推定する屋内位置推定部22を備え、測位部23は該推定された時刻および屋内送信機から受信した位置情報を用いて決定した位置を補正する。
【解決手段】GPS受信機1が算出した位置がGPS衛星を受信して算出した位置なのか、屋内送信機から送信される位置情報を受信したのか判定するGPS種別判定部21と、GPS受信機1からの位置情報および方位検出装置3で算出される方位と、速度検出装置4で算出される速度と、記憶装置5で記憶される地図データベースを用いて位置を決定する測位部23と、屋内送信機から送信される位置情報について、その位置情報が示す場所を走行した時刻を推定する屋内位置推定部22を備え、測位部23は該推定された時刻および屋内送信機から受信した位置情報を用いて決定した位置を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS衛星と同じ信号仕様で屋内送信機から送信される位置情報を受信して現在位置を地図上に表示するナビゲーション装置に関する。
【背景技術】
【0002】
従来のナビゲーション装置では、GPS衛星からの信号を受信することで、位置情報を取得している。GPS衛星からの信号を受信することができない地下道やトンネル等においては、屋内送信機でGPS衛星と同一の周波数および変調方法を用いて位置情報を送る位置情報提供システムが知られている。この場合、アンテナやRF部および復調回路などのハードウェアはそのままで、GPS受信機のソフトウェアを変更するだけで、位置情報を取得することができる。この位置情報提供システムおよびそれを利用したナビゲーション装置が、下記の特許文献で提案されている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−278756号公報(第8−24頁、第4図)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のナビゲーション装置においては、屋内送信機から送られる位置情報は一定の範囲で受信されるため、同じ屋内送信機から送信されている位置情報を受信している期間はナビゲーション装置で表示する位置が常に同じ場所を表示してしまうという問題があった。
【0005】
また、異なる屋内送信機からの信号を受信した場合は、表示位置が突然大きく変化して、ユーザーに違和感を与える動作をしてしまうという問題があった。
【0006】
更に、車速パルス等のセンサを用いて現在位置を更新するナビゲーション装置の場合には、センサで検出するナビゲーション装置の挙動に対して、GPS受信機で取得する屋内装置の位置は変化しないため、センサ動作と不整合が生じて、表示する現在位置についてユーザーに違和感を与える動作をしてしまうという問題があった。
【0007】
本発明は、従来の問題を解決するためになされたもので、同じ屋内送信機から送信されている位置情報を受信している期間内に移動している場合でも、連続的な位置情報を表示することのできるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために本発明は、移動体の現在位置を表示し案内を行うナビゲーション装置であって、GPS受信機が算出した位置がGPS衛星を受信して算出した位置なのか、屋内送信機から送信される位置情報を受信したのか判定するGPS種別判定部と、GPS受信機からの位置情報および方位検出装置で算出される方位と、速度検出装置で算出される速度と、記憶装置で記憶される地図データベースを用いて位置を決定する測位部と、屋内送信機から送信される位置情報について、その位置情報が示す場所を走行した時刻を推定する屋内位置推定部を備え、測位部は該推定された時刻および屋内送信機から受信した位置情報を用いて前記決定した位置を補正する。
【0009】
また、屋内位置推定部は、屋内送信機からの位置情報を受信開始してから受信終了まで時間情報を用いて、屋内送信機の送信アンテナ近傍を走行した時刻を推定する。
【0010】
また、屋内位置推定部は、屋内送信機からの位置情報を受信開始してから受信終了までに走行した距離を用いて、屋内送信機の送信アンテナ近傍を走行した時刻を推定する。
【発明の効果】
【0011】
本発明によれば、屋内送信機からGPS衛星と同じ信号仕様で送られた位置情報をGPS受信機で受信した際に、ナビゲーション装置が移動しているにもかかわらず同一の位置情報を取得してしまう場合においても、ユーザーに違和感無く正しい現在位置を地図上に表示できるという効果を有する。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態1におけるナビゲーション装置のブロック図
【図2】屋内送信機およびナビゲーション装置の関係を示す説明図
【図3】本発明の実施の形態1における屋内位置推定部22の処理の流れを示すフローチャート
【図4】本発明の実施の形態1における測位部23の動作を説明するための図
【図5】本発明の実施の形態2における屋内位置推定部22の処理の流れを示すフローチャート
【発明を実施するための形態】
【0013】
(実施の形態1)
以下、本発明の実施の形態1におけるナビゲーション装置について図面を参照しながら説明する。
【0014】
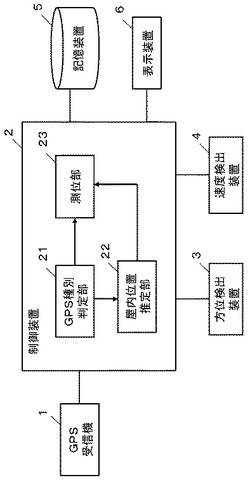
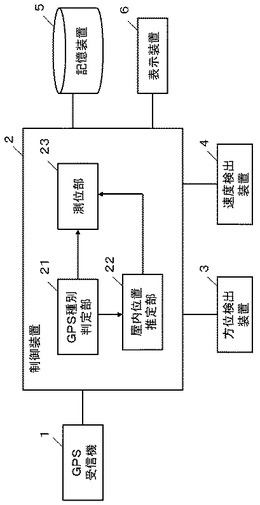
図1は本実施の形態におけるナビゲーション装置のブロック図である。図1において、ナビゲーション装置100は、GPS受信機1、制御装置2、方位検出装置3、速度検出装置4、記憶装置5、表示装置6を備える。
【0015】
GPS受信機1は、米国が管理する複数のGPS衛星からの信号を受信して、位置や速度、方位を算出するものである。また近年、GPS衛星からの信号を受信できない地下道やトンネル等の場所でも位置を特定するために、GPS衛星と同一の周波数および変調方法で位置情報を送信する方式が検討されており、その屋内送信機からの信号も受信して位置を特定できる機能を有する。
【0016】
GPS受信機1がGPS衛星から信号を受信して位置を算出するためには、最低4つ以上の衛星からの信号を受信することで、リアルタイムで位置を算出することが可能である。一方、屋内送信機から送られる信号には、あらかじめ特定の緯度、経度等の情報が格納されているものであり、1つの屋内送信機からの信号を受信することで位置を取得することができる。しかしながら、同一の屋内送信機からの信号を受信する限り、同一の位置を継続して取得することとなる。
【0017】
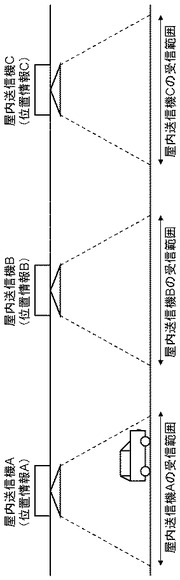
図2は、トンネル内に複数の屋内送信機が設置されている例を示している。屋内送信機Aは位置情報A、屋内送信機Bは位置情報B、屋内送信機Cは位置情報Cを常に送信している。そのため、車が屋内送信機Aの受信範囲内ではナビゲーション装置100は位置情報Aを常に受信することとなる。同様に、車が屋内送信機Bの受信範囲内ではナビゲーション装置100は位置情報Bを常に受信し、屋内送信機Cの受信範囲内では位置情報Cを常に受信する。
【0018】
屋内送信機から送信される位置情報は、送信アンテナを中心として一定の範囲で受信できるため、位置情報が指し示す位置は送信機のアンテナが設置されている位置、もしくはその近傍と考えるのが一般的である。すなわち、送信機のアンテナが設置されている位置、もしくはその近傍以外で屋内送信機から送信される位置情報を受信しても、正しい位置を示すものではなく誤差を含んでいることになる。
【0019】
ナビゲーション装置100においては、リアルタイムで現在位置を表示/更新するためには、位置と時刻が重要になるものであり、屋内送信機からの位置情報を取得した際にも、その位置情報を指し示す場所をいつ走行したのかを認識することが必要となる。
【0020】
GPS受信機1において、GPS衛星からの信号を受信しているのか屋内送信機からの信号を受信しているのかを判別するためには、符号化で用いられる疑似拡散符号の符号化コードで区別することができる。GPS受信機1では、位置情報などを出力するのと同時に、いずれからの信号を受信したものかを示すデータ種別を合わせて出力する。
【0021】
屋内送信機からの位置情報を取得するシステムの代表的な例としては、日本の準天頂衛星の信号仕様の一部として明記されている。
【0022】
制御装置2は、GPS種別判定部21、屋内位置推定部22、測位部23で構成され、現在位置をリアルタイムで特定するものであり、詳細は後述する。
【0023】
方位検出装置3は、ナビゲーション装置100の移動方位を特定するためのセンサで構成されている。車載用のナビゲーション装置では、一般的にコリオリの力を利用した、ジャイロセンサが利用される。ジャイロセンサは角速度を検出するものであり、その出力を積分することで相対的な角度を算出することができる。GPS衛星から出力される絶対方位等から初期方位を特定し、ジャイロで算出した相対角度を加算することで、絶対方位を求める。
【0024】
また、車載ではなく、徒歩などで利用される歩行用のナビゲーション装置においては、地磁気センサが搭載される場合もある。地磁気センサは地球の磁場を検出して絶対的な方位を算出するものである。
【0025】
本発明においては、方位検出装置3は一般的に方位を検出するセンサで構成されるものであり、そのセンサの種類による影響を受けるものではなく、方位を検出することができればいずれのセンサを用いても良い。
【0026】
速度検出装置4は、ナビゲーション装置の速度を特定するためのセンサで構成されているものである。車載用ナビゲーション装置では、車両のタイヤの回転を検出する車速パルスを取得する構成が一般的である。また、ポータブルナビゲーション装置等の車速パルスを取得できない場合は、加速度センサを搭載し加速度を積分して速度を検出することが考えられる。
【0027】
更に歩行者用ナビゲーション装置においては、同様に加速度センサを用いて人の歩みによる振動を検出して、時間当たりの歩数から速度を推定する方法等が考えられる。
【0028】
本発明において、速度検出装置4は、一般的に速度を取得するセンサで構成されるものであり、そのセンサの種類による影響を受けるものではなく、速度を検出することができればいずれのセンサを用いても良い。
【0029】
記憶装置5は、フラッシュメモリやDVDなどの不揮発性の記憶媒体で構成され、一般的に道路形状や高速道路や国道、市道等の道路種別、交差点名称や施設名称などの地図データが格納されている。
【0030】
表示装置6は、液晶パネルなどを用いたものであり、地図上に現在位置をリアルタイムに表示するものである。またナビゲーション装置100の操作メニューなども表示される。
【0031】
次に、制御装置2について詳しく説明する。GPS種別判定部21では、GPS受信機1から送られる位置情報がGPS衛星からの信号を受信して算出した位置なのか、屋内送信機からの信号を受信して算出した位置なのか、その種別を判定するものである。GPS衛星を受信して算出した位置であると判定した場合は、その情報を測位部23に送る。屋内送信機から取得した位置情報である場合は、本来その位置情報が指し示す屋内送信機のアンテナ位置の近傍を走行した時刻を判断できないため、測位部23には送らない。
【0032】
一方、GPS受信機1から送られる全ての測位結果については、屋内位置推定部22に送られ、屋内送信機からの位置情報の場合は、屋内送信機のアンテナ近傍を走行した時刻を推定した上で、測位部23に送られる。
【0033】
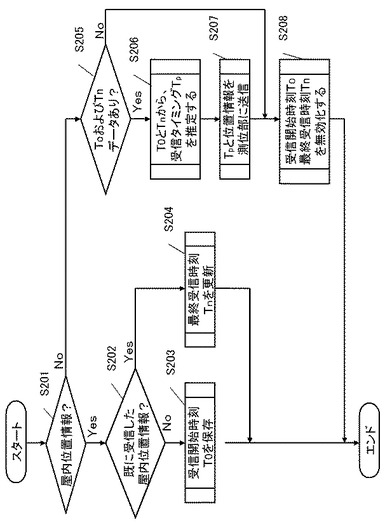
次に図面を用いて、屋内位置推定部22について説明する。図3は、屋内位置推定部22の処理の流れを示すフローチャートである。GPS種別判定部21がGPS受信機1から位置情報を取得するごとに、屋内位置推定部22に位置情報が送られ、屋内位置推定部22が処理を開始する。ステップS201では取得した位置情報が、GPS衛星からの信号を受信して位置を算出した情報なのか、屋内送信機から取得した位置であるのかを確認する。
【0034】
屋内送信機から取得した位置であることが確認できた場合(ステップS201でYes)、ステップS202において、その屋内位置情報と同一の位置情報を既に受信しているか確認する。
【0035】
初めて受信した屋内位置情報である場合(ステップS202でNo)は、ステップS203においてその屋内位置情報の受信時刻を受信開始時刻T0として記憶して、処理を終了する。以降、同一の屋内位置情報を受信した際(ステップS202でYes)には、ステップS204において受信時刻を最終受信時刻Tnとして記憶して、処理を終了する。
【0036】
最終受信時刻Tnについては、同一の屋内位置情報を受信する毎に、更新するものであり、必ず最後に受信した同一の屋内位置情報を受信した際の時刻が格納されている。
【0037】
ステップS201において、屋内送信機から取得した位置情報かどうかを判定しているが、屋内送信機から送信された位置情報でない場合(No)、つまり屋内送信機からの情報を取得できなくなった場合に、屋内送信機のアンテナ位置近傍を走行した時刻を推定する処理をおこなう。具体的には、ステップS205において受信開始時刻T0と最終受信時刻Tnが存在するかどうか確認する。
【0038】
T0とTnが存在しない場合(ステップS205でNo)は、屋内送信機の送信アンテナ近傍を走行した時刻を推定できないので、処理をステップS208に進める。T0とTnが存在した場合(ステップS205でYes)、屋内送信機からの同一の位置情報を受信している短時間は、ナビゲーション装置100の速度が一定で変化しないと仮定することで、受信開始時刻T0から最終受信時刻Tnの中点が、屋内送信機のアンテナ近傍を走行した時刻と推定することができる。すなわち、ステップS206では、その時刻Tpを次式で計算する。
【0039】
Tp=T0+(Tn−T0)/2
更に、屋内送信アンテナ近傍を走行した時刻Tpを推定した後は、時刻Tpおよび位置情報を測位部23に送る(ステップS207)。そして、ステップS208において受信開始時刻T0と最終受信時刻Tnを初期化(未取得)しておき、次回の屋内送信機からの位置情報受信のための初期化処理を行い、処理を終了する。
【0040】
このようにして、車がある屋内送信機からの位置情報を受信し始めてから、その受信範囲を外れた時点で、屋内送信アンテナ近傍を走行した時刻が推定され、推定した時刻情報Tpと屋内送信機の位置情報が測位部23へ送られることになる。
【0041】
次に、測位部23について詳しく説明する。まず、GPS受信機1がGPS衛星から信号を受信して測位した位置を取得した場合を説明し、その後に屋内送信機から位置情報を受信し、屋内位置推定部22で屋内送信アンテナ近傍を走行した時刻が確定した際の動作を説明する。
【0042】
測位部23は、GPS受信機1からの位置情報、方位検出装置3からの方位情報、速度検出装置4からの速度情報、記憶装置5からの地図情報を用いて、総合的に現在位置を判定するとともに、判定結果を地図情報とともに表示装置6にリアルタイムで表示する。
【0043】
GPS受信機1は、GPS衛星からの信号を受信して、ナビゲーション装置100の地球上での絶対位置を特定することができる。しかしながら、GPS衛星は高度約20000kmの上空に存在するため、その精度は走行場所の影響を大きく受けてしまう。例えば、高速道路などの高架下や高層ビル街においては、受信できる衛星が減少したり、反射波の影響を受けてしまう。具体的には、見晴らしの良い障害物の無い場所では、10m以下の精度であるが、ビル街などでは100mを超える誤差が出力され場合も想定される。
【0044】
また別の位置を算出する方法として、例えばGPS受信機1から取得した位置を初期位置として、方位と速度から速度ベクトルを算出して、初期位置に加算することで位置を算出することもできる。GPS受信機1のように走行場所の影響を受けるものではないが、方位や速度の誤差が蓄積してしまうため、時間とともに位置の誤差が増大してしまうという問題点がある。従って、一般的なナビゲーション装置においては、初期位置が不定の場合や、現在位置の誤差が大きいと判定される場合は、GPS受信機1で算出した位置を初期位置として、方位検出装置3および速度検出装置4から求めた速度ベクトルで位置を更新するとともに、GPS受信機1で算出した位置を用いて、センサで算出した位置に関して推定される誤差を徐々に補正するといった方法が用いられる。
【0045】
また車載用ナビゲーション装置の場合は、車両は基本的に道路上を走行するという想定から、算出した位置を道路上に合わせこむマップマッチングを行うことで、より精度を向上させるものである。
【0046】
このようなナビゲーションシステムにおいて、前述した屋内送信機から送信された位置情報をGPS受信機1で取得し、GPS衛星から算出した位置情報と同じように利用した場合、屋内送信機から離れた場所に初期位置を設定してしまったり、方位検出装置3や速度検出装置4で位置を更新したにもかかわらず、常に同一の位置情報で誤差を補正しようとするため、ユーザーが違和感を感じる挙動になってしまう。
【0047】
そのため、上述したGPS種別判定部21で屋内送信機から取得した位置情報と推定される場合は、測位部23に送らないものとしている。
【0048】
次に、屋内位置推定部22において屋内送信機のアンテナ近傍を走行した時刻Tpを推定した位置情報が入力された際の測位部23の動作を説明する。
【0049】
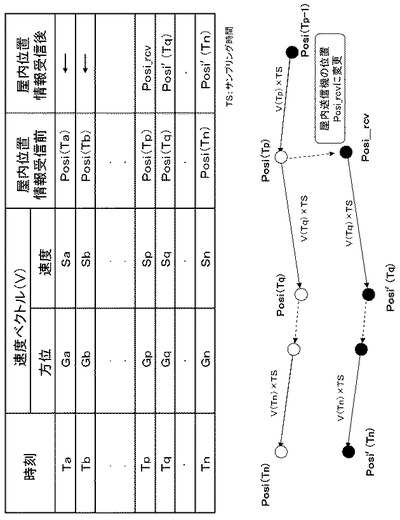
図3のフローチャートで説明したように、屋内位置推定部22においては、屋内送信機の近傍を走行した時刻Tpとその位置を特定し、測位部23に送る。屋内位置推定部22では、時刻Tpを推定するために、屋内送信機からの信号を受信してから受信完了までの時間を利用するので、時刻Tpは過去の時間となる。そのため、測位部23ではある一定時間の方位、速度、位置の情報を記憶しておき、現在位置を算出する。以下に図を用いて、動作の一例を説明する。
【0050】
図4において、測位部23は、時刻Taからの速度ベクトルV(方位、速度)および位置情報(Posi)を記憶している。測位部23の基本動作として直前の位置情報に対して、速度ベクトル(方位と速度から計算)にサンプリング時間(TS:自車位置を更新する間隔)をかけて求めた移動量を加算することで、新たな位置を算出する。例えば、時刻Tbにおける位置は、以下の式で計算することができる。
【0051】
Posi(Tb)=Posi(Ta)+V(Tb)×TS
このように構成される測位部23において、屋内位置推定部22から、時刻Tpにおける位置情報Posi−rcvを受信した場合の動作を以下に説明する。
【0052】
ここでは、測位部23において算出した位置Posi(Tp)の誤差が大きい、もしくは不定の場合を想定する。既に説明したように、測位部23では1つ前のタイミングにおける位置情報に対して速度ベクトルから算出した移動量を加算することで新たな位置を算出する。そのため、時刻Tpにおける位置Posi(Tp)は、次式にて算出されている。
【0053】
Posi(Tp)=Posi(Tp−1)+V(Tp)×TS
その後、屋内位置推定部22で算出された時刻Tpにおける位置情報Posi−rcvを受信すると、Posi−rcvを時刻Tpにおける位置として考え、次の計算タイミング(Tq)において、Posi−rcvを基準の位置として、位置を更新する。
【0054】
具体的には、新たに計算する時刻Tqの位置は次の計算式で求めることができる。
【0055】
Posi’(Tq)=Posi−rcv+V(Tq)×TS
同様の計算を測位部23で保持している現在時刻(Tn)までの速度ベクトルに対して繰り返し行うことで、現在時刻Tnにおける位置を算出することができる。
【0056】
Posi’(Tn)=Posi’(Tn-1)+V(Tn)×TS
また、時刻Tpにおける位置情報Posi(Tp)の精度が保証される場合は、屋内送信機から取得した位置情報Posi−rcvを用いてPosi(Tp)に対して一定の補正処理を行って、Posi’(Tp)を新たに計算した上で、上述した場合と同じようTnまでの速度ベクトルを積分することで、センサによる誤差の影響を低減し、精度の良い位置情報を取得することができる。
【0057】
(実施の形態2)
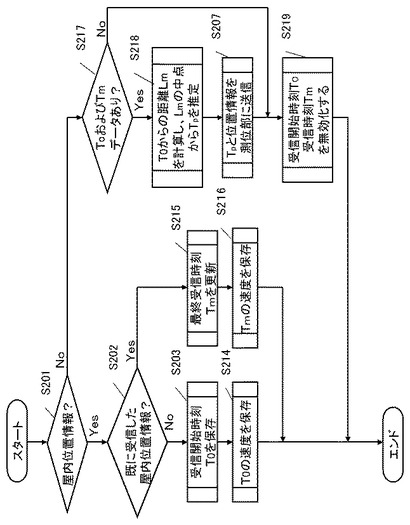
以下、本発明の実施の形態2における屋内位置推定部22について図面を参照しながら説明する。図5は、本実施の形態における屋内位置推定部22の処理の流れを示すフローチャートである。
【0058】
実施の形態1との相違点は、屋内位置推定部22において屋内送信機からの位置情報を受信開始してから、速度検出装置4で取得した速度を用いて推定した走行距離を考慮して屋内送信機のアンテナ近傍を走行した時刻を推定する点である。
【0059】
ステップS201〜S203は、実施の形態1の図3と同じ処理であるため説明を省略する。ステップS214では、ステップS203で受信開始時刻T0を保存した後、T0における速度を記憶しておく。また、ステップS202において、既に屋内送信機からの信号を受信している場合(Yes)は、ステップS215およびステップS216において、以降の全ての受信時刻Tmと、Tmにおける速度を記憶しておく。
【0060】
ステップS201において、屋内送信機からの位置情報を受信できなくなった場合(No)は、ステップS217で受信開始時刻T0と受信時刻Tmが存在するかどうか確認する。T0とTmが存在しない場合(ステップS217でNo)、処理をステップS219に進める。T0とTmが存在して(ステップS217でYes)、Tpを推定可能と判断した場合に、屋内送信機のアンテナ近傍を走行した時刻を以下の方法で推定する。
【0061】
実施の形態1と同様に、屋内送信機からの受信ができなくなった際に、屋内送信機からの位置情報を受信している間の走行距離の中間点が送信アンテナ近傍位置であると仮定することで、屋内送信機のアンテナ位置を推定することができる。具体的には、ステップS218において、屋内送信機からの位置情報を受信開始してからの速度を積分して距離(Lm)を算出する。そして、再度受信開始時刻T0から速度を積分していき、Lm×1/2となる時刻Tpを算出する。屋内送信機からの信号は、送信アンテナの指向性が無いものであると考えると、その信号の受信範囲は距離に依存するものである。従って、トンネルや屋内の廊下など長細い通路を走行していると考えると、受信開始してから受信終了するまでの距離の中間点が屋内送信機のアンテナ位置と推定することができる。
【0062】
次に、屋内送信アンテナ近傍を走行した時刻Tpを推定した後は、時刻Tpおよび位置情報を測位部23に送る(ステップS207)。次に、ステップS219では、屋内送信機から位置情報を受信した際の処理のために、各種変数領域(T0とTm)を初期化する。
【0063】
以上のように本実施の形態によれば、屋内送信機から位置情報を受信した場合でも、位置情報が示す屋内送信機アンテナ位置の近傍を走行した時刻を精度よく推定することができるため、地図上に現在位置をユーザーに違和感無く表示することができる。また、屋内送信機のアンテナ近傍を走行した時刻を推定する際に、速度検出装置からの速度を用いて推定することにより、速度変化があった場合でも正しく時刻を推定することができる。
【産業上の利用可能性】
【0064】
本発明のナビゲーション装置は、屋内送信機からGPS衛星と同じ信号仕様で送られた位置情報をGPS受信機で受信した際に、ナビゲーション装置が移動しているにもかかわらず同一の位置情報を取得してしまう場合においても、ユーザーに違和感無く正しい現在位置を地図上に表示できるという効果を有し、車に搭載されるナビゲーション装置等として有用である。
【符号の説明】
【0065】
1 GPS受信機
2 制御装置
3 方位検出装置
4 速度検出装置
5 記憶装置
6 表示装置
21 GPS種別判定部
22 屋内位置推定部
23 測位部
100 ナビゲーション装置
【技術分野】
【0001】
本発明は、GPS衛星と同じ信号仕様で屋内送信機から送信される位置情報を受信して現在位置を地図上に表示するナビゲーション装置に関する。
【背景技術】
【0002】
従来のナビゲーション装置では、GPS衛星からの信号を受信することで、位置情報を取得している。GPS衛星からの信号を受信することができない地下道やトンネル等においては、屋内送信機でGPS衛星と同一の周波数および変調方法を用いて位置情報を送る位置情報提供システムが知られている。この場合、アンテナやRF部および復調回路などのハードウェアはそのままで、GPS受信機のソフトウェアを変更するだけで、位置情報を取得することができる。この位置情報提供システムおよびそれを利用したナビゲーション装置が、下記の特許文献で提案されている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−278756号公報(第8−24頁、第4図)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のナビゲーション装置においては、屋内送信機から送られる位置情報は一定の範囲で受信されるため、同じ屋内送信機から送信されている位置情報を受信している期間はナビゲーション装置で表示する位置が常に同じ場所を表示してしまうという問題があった。
【0005】
また、異なる屋内送信機からの信号を受信した場合は、表示位置が突然大きく変化して、ユーザーに違和感を与える動作をしてしまうという問題があった。
【0006】
更に、車速パルス等のセンサを用いて現在位置を更新するナビゲーション装置の場合には、センサで検出するナビゲーション装置の挙動に対して、GPS受信機で取得する屋内装置の位置は変化しないため、センサ動作と不整合が生じて、表示する現在位置についてユーザーに違和感を与える動作をしてしまうという問題があった。
【0007】
本発明は、従来の問題を解決するためになされたもので、同じ屋内送信機から送信されている位置情報を受信している期間内に移動している場合でも、連続的な位置情報を表示することのできるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために本発明は、移動体の現在位置を表示し案内を行うナビゲーション装置であって、GPS受信機が算出した位置がGPS衛星を受信して算出した位置なのか、屋内送信機から送信される位置情報を受信したのか判定するGPS種別判定部と、GPS受信機からの位置情報および方位検出装置で算出される方位と、速度検出装置で算出される速度と、記憶装置で記憶される地図データベースを用いて位置を決定する測位部と、屋内送信機から送信される位置情報について、その位置情報が示す場所を走行した時刻を推定する屋内位置推定部を備え、測位部は該推定された時刻および屋内送信機から受信した位置情報を用いて前記決定した位置を補正する。
【0009】
また、屋内位置推定部は、屋内送信機からの位置情報を受信開始してから受信終了まで時間情報を用いて、屋内送信機の送信アンテナ近傍を走行した時刻を推定する。
【0010】
また、屋内位置推定部は、屋内送信機からの位置情報を受信開始してから受信終了までに走行した距離を用いて、屋内送信機の送信アンテナ近傍を走行した時刻を推定する。
【発明の効果】
【0011】
本発明によれば、屋内送信機からGPS衛星と同じ信号仕様で送られた位置情報をGPS受信機で受信した際に、ナビゲーション装置が移動しているにもかかわらず同一の位置情報を取得してしまう場合においても、ユーザーに違和感無く正しい現在位置を地図上に表示できるという効果を有する。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態1におけるナビゲーション装置のブロック図
【図2】屋内送信機およびナビゲーション装置の関係を示す説明図
【図3】本発明の実施の形態1における屋内位置推定部22の処理の流れを示すフローチャート
【図4】本発明の実施の形態1における測位部23の動作を説明するための図
【図5】本発明の実施の形態2における屋内位置推定部22の処理の流れを示すフローチャート
【発明を実施するための形態】
【0013】
(実施の形態1)
以下、本発明の実施の形態1におけるナビゲーション装置について図面を参照しながら説明する。
【0014】
図1は本実施の形態におけるナビゲーション装置のブロック図である。図1において、ナビゲーション装置100は、GPS受信機1、制御装置2、方位検出装置3、速度検出装置4、記憶装置5、表示装置6を備える。
【0015】
GPS受信機1は、米国が管理する複数のGPS衛星からの信号を受信して、位置や速度、方位を算出するものである。また近年、GPS衛星からの信号を受信できない地下道やトンネル等の場所でも位置を特定するために、GPS衛星と同一の周波数および変調方法で位置情報を送信する方式が検討されており、その屋内送信機からの信号も受信して位置を特定できる機能を有する。
【0016】
GPS受信機1がGPS衛星から信号を受信して位置を算出するためには、最低4つ以上の衛星からの信号を受信することで、リアルタイムで位置を算出することが可能である。一方、屋内送信機から送られる信号には、あらかじめ特定の緯度、経度等の情報が格納されているものであり、1つの屋内送信機からの信号を受信することで位置を取得することができる。しかしながら、同一の屋内送信機からの信号を受信する限り、同一の位置を継続して取得することとなる。
【0017】
図2は、トンネル内に複数の屋内送信機が設置されている例を示している。屋内送信機Aは位置情報A、屋内送信機Bは位置情報B、屋内送信機Cは位置情報Cを常に送信している。そのため、車が屋内送信機Aの受信範囲内ではナビゲーション装置100は位置情報Aを常に受信することとなる。同様に、車が屋内送信機Bの受信範囲内ではナビゲーション装置100は位置情報Bを常に受信し、屋内送信機Cの受信範囲内では位置情報Cを常に受信する。
【0018】
屋内送信機から送信される位置情報は、送信アンテナを中心として一定の範囲で受信できるため、位置情報が指し示す位置は送信機のアンテナが設置されている位置、もしくはその近傍と考えるのが一般的である。すなわち、送信機のアンテナが設置されている位置、もしくはその近傍以外で屋内送信機から送信される位置情報を受信しても、正しい位置を示すものではなく誤差を含んでいることになる。
【0019】
ナビゲーション装置100においては、リアルタイムで現在位置を表示/更新するためには、位置と時刻が重要になるものであり、屋内送信機からの位置情報を取得した際にも、その位置情報を指し示す場所をいつ走行したのかを認識することが必要となる。
【0020】
GPS受信機1において、GPS衛星からの信号を受信しているのか屋内送信機からの信号を受信しているのかを判別するためには、符号化で用いられる疑似拡散符号の符号化コードで区別することができる。GPS受信機1では、位置情報などを出力するのと同時に、いずれからの信号を受信したものかを示すデータ種別を合わせて出力する。
【0021】
屋内送信機からの位置情報を取得するシステムの代表的な例としては、日本の準天頂衛星の信号仕様の一部として明記されている。
【0022】
制御装置2は、GPS種別判定部21、屋内位置推定部22、測位部23で構成され、現在位置をリアルタイムで特定するものであり、詳細は後述する。
【0023】
方位検出装置3は、ナビゲーション装置100の移動方位を特定するためのセンサで構成されている。車載用のナビゲーション装置では、一般的にコリオリの力を利用した、ジャイロセンサが利用される。ジャイロセンサは角速度を検出するものであり、その出力を積分することで相対的な角度を算出することができる。GPS衛星から出力される絶対方位等から初期方位を特定し、ジャイロで算出した相対角度を加算することで、絶対方位を求める。
【0024】
また、車載ではなく、徒歩などで利用される歩行用のナビゲーション装置においては、地磁気センサが搭載される場合もある。地磁気センサは地球の磁場を検出して絶対的な方位を算出するものである。
【0025】
本発明においては、方位検出装置3は一般的に方位を検出するセンサで構成されるものであり、そのセンサの種類による影響を受けるものではなく、方位を検出することができればいずれのセンサを用いても良い。
【0026】
速度検出装置4は、ナビゲーション装置の速度を特定するためのセンサで構成されているものである。車載用ナビゲーション装置では、車両のタイヤの回転を検出する車速パルスを取得する構成が一般的である。また、ポータブルナビゲーション装置等の車速パルスを取得できない場合は、加速度センサを搭載し加速度を積分して速度を検出することが考えられる。
【0027】
更に歩行者用ナビゲーション装置においては、同様に加速度センサを用いて人の歩みによる振動を検出して、時間当たりの歩数から速度を推定する方法等が考えられる。
【0028】
本発明において、速度検出装置4は、一般的に速度を取得するセンサで構成されるものであり、そのセンサの種類による影響を受けるものではなく、速度を検出することができればいずれのセンサを用いても良い。
【0029】
記憶装置5は、フラッシュメモリやDVDなどの不揮発性の記憶媒体で構成され、一般的に道路形状や高速道路や国道、市道等の道路種別、交差点名称や施設名称などの地図データが格納されている。
【0030】
表示装置6は、液晶パネルなどを用いたものであり、地図上に現在位置をリアルタイムに表示するものである。またナビゲーション装置100の操作メニューなども表示される。
【0031】
次に、制御装置2について詳しく説明する。GPS種別判定部21では、GPS受信機1から送られる位置情報がGPS衛星からの信号を受信して算出した位置なのか、屋内送信機からの信号を受信して算出した位置なのか、その種別を判定するものである。GPS衛星を受信して算出した位置であると判定した場合は、その情報を測位部23に送る。屋内送信機から取得した位置情報である場合は、本来その位置情報が指し示す屋内送信機のアンテナ位置の近傍を走行した時刻を判断できないため、測位部23には送らない。
【0032】
一方、GPS受信機1から送られる全ての測位結果については、屋内位置推定部22に送られ、屋内送信機からの位置情報の場合は、屋内送信機のアンテナ近傍を走行した時刻を推定した上で、測位部23に送られる。
【0033】
次に図面を用いて、屋内位置推定部22について説明する。図3は、屋内位置推定部22の処理の流れを示すフローチャートである。GPS種別判定部21がGPS受信機1から位置情報を取得するごとに、屋内位置推定部22に位置情報が送られ、屋内位置推定部22が処理を開始する。ステップS201では取得した位置情報が、GPS衛星からの信号を受信して位置を算出した情報なのか、屋内送信機から取得した位置であるのかを確認する。
【0034】
屋内送信機から取得した位置であることが確認できた場合(ステップS201でYes)、ステップS202において、その屋内位置情報と同一の位置情報を既に受信しているか確認する。
【0035】
初めて受信した屋内位置情報である場合(ステップS202でNo)は、ステップS203においてその屋内位置情報の受信時刻を受信開始時刻T0として記憶して、処理を終了する。以降、同一の屋内位置情報を受信した際(ステップS202でYes)には、ステップS204において受信時刻を最終受信時刻Tnとして記憶して、処理を終了する。
【0036】
最終受信時刻Tnについては、同一の屋内位置情報を受信する毎に、更新するものであり、必ず最後に受信した同一の屋内位置情報を受信した際の時刻が格納されている。
【0037】
ステップS201において、屋内送信機から取得した位置情報かどうかを判定しているが、屋内送信機から送信された位置情報でない場合(No)、つまり屋内送信機からの情報を取得できなくなった場合に、屋内送信機のアンテナ位置近傍を走行した時刻を推定する処理をおこなう。具体的には、ステップS205において受信開始時刻T0と最終受信時刻Tnが存在するかどうか確認する。
【0038】
T0とTnが存在しない場合(ステップS205でNo)は、屋内送信機の送信アンテナ近傍を走行した時刻を推定できないので、処理をステップS208に進める。T0とTnが存在した場合(ステップS205でYes)、屋内送信機からの同一の位置情報を受信している短時間は、ナビゲーション装置100の速度が一定で変化しないと仮定することで、受信開始時刻T0から最終受信時刻Tnの中点が、屋内送信機のアンテナ近傍を走行した時刻と推定することができる。すなわち、ステップS206では、その時刻Tpを次式で計算する。
【0039】
Tp=T0+(Tn−T0)/2
更に、屋内送信アンテナ近傍を走行した時刻Tpを推定した後は、時刻Tpおよび位置情報を測位部23に送る(ステップS207)。そして、ステップS208において受信開始時刻T0と最終受信時刻Tnを初期化(未取得)しておき、次回の屋内送信機からの位置情報受信のための初期化処理を行い、処理を終了する。
【0040】
このようにして、車がある屋内送信機からの位置情報を受信し始めてから、その受信範囲を外れた時点で、屋内送信アンテナ近傍を走行した時刻が推定され、推定した時刻情報Tpと屋内送信機の位置情報が測位部23へ送られることになる。
【0041】
次に、測位部23について詳しく説明する。まず、GPS受信機1がGPS衛星から信号を受信して測位した位置を取得した場合を説明し、その後に屋内送信機から位置情報を受信し、屋内位置推定部22で屋内送信アンテナ近傍を走行した時刻が確定した際の動作を説明する。
【0042】
測位部23は、GPS受信機1からの位置情報、方位検出装置3からの方位情報、速度検出装置4からの速度情報、記憶装置5からの地図情報を用いて、総合的に現在位置を判定するとともに、判定結果を地図情報とともに表示装置6にリアルタイムで表示する。
【0043】
GPS受信機1は、GPS衛星からの信号を受信して、ナビゲーション装置100の地球上での絶対位置を特定することができる。しかしながら、GPS衛星は高度約20000kmの上空に存在するため、その精度は走行場所の影響を大きく受けてしまう。例えば、高速道路などの高架下や高層ビル街においては、受信できる衛星が減少したり、反射波の影響を受けてしまう。具体的には、見晴らしの良い障害物の無い場所では、10m以下の精度であるが、ビル街などでは100mを超える誤差が出力され場合も想定される。
【0044】
また別の位置を算出する方法として、例えばGPS受信機1から取得した位置を初期位置として、方位と速度から速度ベクトルを算出して、初期位置に加算することで位置を算出することもできる。GPS受信機1のように走行場所の影響を受けるものではないが、方位や速度の誤差が蓄積してしまうため、時間とともに位置の誤差が増大してしまうという問題点がある。従って、一般的なナビゲーション装置においては、初期位置が不定の場合や、現在位置の誤差が大きいと判定される場合は、GPS受信機1で算出した位置を初期位置として、方位検出装置3および速度検出装置4から求めた速度ベクトルで位置を更新するとともに、GPS受信機1で算出した位置を用いて、センサで算出した位置に関して推定される誤差を徐々に補正するといった方法が用いられる。
【0045】
また車載用ナビゲーション装置の場合は、車両は基本的に道路上を走行するという想定から、算出した位置を道路上に合わせこむマップマッチングを行うことで、より精度を向上させるものである。
【0046】
このようなナビゲーションシステムにおいて、前述した屋内送信機から送信された位置情報をGPS受信機1で取得し、GPS衛星から算出した位置情報と同じように利用した場合、屋内送信機から離れた場所に初期位置を設定してしまったり、方位検出装置3や速度検出装置4で位置を更新したにもかかわらず、常に同一の位置情報で誤差を補正しようとするため、ユーザーが違和感を感じる挙動になってしまう。
【0047】
そのため、上述したGPS種別判定部21で屋内送信機から取得した位置情報と推定される場合は、測位部23に送らないものとしている。
【0048】
次に、屋内位置推定部22において屋内送信機のアンテナ近傍を走行した時刻Tpを推定した位置情報が入力された際の測位部23の動作を説明する。
【0049】
図3のフローチャートで説明したように、屋内位置推定部22においては、屋内送信機の近傍を走行した時刻Tpとその位置を特定し、測位部23に送る。屋内位置推定部22では、時刻Tpを推定するために、屋内送信機からの信号を受信してから受信完了までの時間を利用するので、時刻Tpは過去の時間となる。そのため、測位部23ではある一定時間の方位、速度、位置の情報を記憶しておき、現在位置を算出する。以下に図を用いて、動作の一例を説明する。
【0050】
図4において、測位部23は、時刻Taからの速度ベクトルV(方位、速度)および位置情報(Posi)を記憶している。測位部23の基本動作として直前の位置情報に対して、速度ベクトル(方位と速度から計算)にサンプリング時間(TS:自車位置を更新する間隔)をかけて求めた移動量を加算することで、新たな位置を算出する。例えば、時刻Tbにおける位置は、以下の式で計算することができる。
【0051】
Posi(Tb)=Posi(Ta)+V(Tb)×TS
このように構成される測位部23において、屋内位置推定部22から、時刻Tpにおける位置情報Posi−rcvを受信した場合の動作を以下に説明する。
【0052】
ここでは、測位部23において算出した位置Posi(Tp)の誤差が大きい、もしくは不定の場合を想定する。既に説明したように、測位部23では1つ前のタイミングにおける位置情報に対して速度ベクトルから算出した移動量を加算することで新たな位置を算出する。そのため、時刻Tpにおける位置Posi(Tp)は、次式にて算出されている。
【0053】
Posi(Tp)=Posi(Tp−1)+V(Tp)×TS
その後、屋内位置推定部22で算出された時刻Tpにおける位置情報Posi−rcvを受信すると、Posi−rcvを時刻Tpにおける位置として考え、次の計算タイミング(Tq)において、Posi−rcvを基準の位置として、位置を更新する。
【0054】
具体的には、新たに計算する時刻Tqの位置は次の計算式で求めることができる。
【0055】
Posi’(Tq)=Posi−rcv+V(Tq)×TS
同様の計算を測位部23で保持している現在時刻(Tn)までの速度ベクトルに対して繰り返し行うことで、現在時刻Tnにおける位置を算出することができる。
【0056】
Posi’(Tn)=Posi’(Tn-1)+V(Tn)×TS
また、時刻Tpにおける位置情報Posi(Tp)の精度が保証される場合は、屋内送信機から取得した位置情報Posi−rcvを用いてPosi(Tp)に対して一定の補正処理を行って、Posi’(Tp)を新たに計算した上で、上述した場合と同じようTnまでの速度ベクトルを積分することで、センサによる誤差の影響を低減し、精度の良い位置情報を取得することができる。
【0057】
(実施の形態2)
以下、本発明の実施の形態2における屋内位置推定部22について図面を参照しながら説明する。図5は、本実施の形態における屋内位置推定部22の処理の流れを示すフローチャートである。
【0058】
実施の形態1との相違点は、屋内位置推定部22において屋内送信機からの位置情報を受信開始してから、速度検出装置4で取得した速度を用いて推定した走行距離を考慮して屋内送信機のアンテナ近傍を走行した時刻を推定する点である。
【0059】
ステップS201〜S203は、実施の形態1の図3と同じ処理であるため説明を省略する。ステップS214では、ステップS203で受信開始時刻T0を保存した後、T0における速度を記憶しておく。また、ステップS202において、既に屋内送信機からの信号を受信している場合(Yes)は、ステップS215およびステップS216において、以降の全ての受信時刻Tmと、Tmにおける速度を記憶しておく。
【0060】
ステップS201において、屋内送信機からの位置情報を受信できなくなった場合(No)は、ステップS217で受信開始時刻T0と受信時刻Tmが存在するかどうか確認する。T0とTmが存在しない場合(ステップS217でNo)、処理をステップS219に進める。T0とTmが存在して(ステップS217でYes)、Tpを推定可能と判断した場合に、屋内送信機のアンテナ近傍を走行した時刻を以下の方法で推定する。
【0061】
実施の形態1と同様に、屋内送信機からの受信ができなくなった際に、屋内送信機からの位置情報を受信している間の走行距離の中間点が送信アンテナ近傍位置であると仮定することで、屋内送信機のアンテナ位置を推定することができる。具体的には、ステップS218において、屋内送信機からの位置情報を受信開始してからの速度を積分して距離(Lm)を算出する。そして、再度受信開始時刻T0から速度を積分していき、Lm×1/2となる時刻Tpを算出する。屋内送信機からの信号は、送信アンテナの指向性が無いものであると考えると、その信号の受信範囲は距離に依存するものである。従って、トンネルや屋内の廊下など長細い通路を走行していると考えると、受信開始してから受信終了するまでの距離の中間点が屋内送信機のアンテナ位置と推定することができる。
【0062】
次に、屋内送信アンテナ近傍を走行した時刻Tpを推定した後は、時刻Tpおよび位置情報を測位部23に送る(ステップS207)。次に、ステップS219では、屋内送信機から位置情報を受信した際の処理のために、各種変数領域(T0とTm)を初期化する。
【0063】
以上のように本実施の形態によれば、屋内送信機から位置情報を受信した場合でも、位置情報が示す屋内送信機アンテナ位置の近傍を走行した時刻を精度よく推定することができるため、地図上に現在位置をユーザーに違和感無く表示することができる。また、屋内送信機のアンテナ近傍を走行した時刻を推定する際に、速度検出装置からの速度を用いて推定することにより、速度変化があった場合でも正しく時刻を推定することができる。
【産業上の利用可能性】
【0064】
本発明のナビゲーション装置は、屋内送信機からGPS衛星と同じ信号仕様で送られた位置情報をGPS受信機で受信した際に、ナビゲーション装置が移動しているにもかかわらず同一の位置情報を取得してしまう場合においても、ユーザーに違和感無く正しい現在位置を地図上に表示できるという効果を有し、車に搭載されるナビゲーション装置等として有用である。
【符号の説明】
【0065】
1 GPS受信機
2 制御装置
3 方位検出装置
4 速度検出装置
5 記憶装置
6 表示装置
21 GPS種別判定部
22 屋内位置推定部
23 測位部
100 ナビゲーション装置
【特許請求の範囲】
【請求項1】
移動体の現在位置を表示し案内を行うナビゲーション装置において、GPS受信機が算出した位置がGPS衛星を受信して算出した位置なのか、屋内送信機から送信される位置情報を受信したのか判定するGPS種別判定部と、GPS受信機からの位置情報および方位検出装置で算出される方位と、速度検出装置で算出される速度と、記憶装置で記憶される地図データベースを用いて位置を決定する測位部と、屋内送信機から送信される位置情報について、その位置情報が示す場所を走行した時刻を推定する屋内位置推定部を備え、前記測位部は該推定された時刻および前記屋内送信機から受信した位置情報を用いて前記決定した位置を補正するナビゲーション装置。
【請求項2】
前記屋内位置推定部は、屋内送信機からの位置情報を受信開始してから受信終了まで時間情報を用いて、屋内送信機の送信アンテナ近傍を走行した時刻を推定することを特徴とする、請求項1記載のナビゲーション装置。
【請求項3】
前記屋内位置推定部は、屋内送信機からの位置情報を受信開始してから受信終了までに走行した距離を用いて、屋内送信機の送信アンテナ近傍を走行した時刻を推定することを特徴とする、請求項1記載のナビゲーション装置。
【請求項1】
移動体の現在位置を表示し案内を行うナビゲーション装置において、GPS受信機が算出した位置がGPS衛星を受信して算出した位置なのか、屋内送信機から送信される位置情報を受信したのか判定するGPS種別判定部と、GPS受信機からの位置情報および方位検出装置で算出される方位と、速度検出装置で算出される速度と、記憶装置で記憶される地図データベースを用いて位置を決定する測位部と、屋内送信機から送信される位置情報について、その位置情報が示す場所を走行した時刻を推定する屋内位置推定部を備え、前記測位部は該推定された時刻および前記屋内送信機から受信した位置情報を用いて前記決定した位置を補正するナビゲーション装置。
【請求項2】
前記屋内位置推定部は、屋内送信機からの位置情報を受信開始してから受信終了まで時間情報を用いて、屋内送信機の送信アンテナ近傍を走行した時刻を推定することを特徴とする、請求項1記載のナビゲーション装置。
【請求項3】
前記屋内位置推定部は、屋内送信機からの位置情報を受信開始してから受信終了までに走行した距離を用いて、屋内送信機の送信アンテナ近傍を走行した時刻を推定することを特徴とする、請求項1記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−83464(P2013−83464A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−221612(P2011−221612)
【出願日】平成23年10月6日(2011.10.6)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月6日(2011.10.6)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]