
ナビゲーション装置
【課題】ユーザにとって、分かり易い目的地までの経路を誘導経路として設定し、ユーザが誘導経路から逸脱することなく、目的地まで到着することが出来るナビゲーション装置を提供する。
【解決方法】目的地設定部22cが目的地を設定すると、経路探索部22dの第2経路探索部22dbは、経路探索時にランドマークを用いた目印案内を行う交差点であるか否かをノード情報から確認する。そして、目印案内を行うノードである場合には、ノードに接続する進入リンク以外のリンク全てを対象に経路探索を続け、目印案内を行わないノードである場合には、当該ノードに接続する進入リンク以外のリンクの内、進入リンクに対して、直進方向に存在するリンクのみを対象に経路探索を続けることで、ランドマークが存在する交差点で右左折する経路を優先的に探索する。
【解決方法】目的地設定部22cが目的地を設定すると、経路探索部22dの第2経路探索部22dbは、経路探索時にランドマークを用いた目印案内を行う交差点であるか否かをノード情報から確認する。そして、目印案内を行うノードである場合には、ノードに接続する進入リンク以外のリンク全てを対象に経路探索を続け、目印案内を行わないノードである場合には、当該ノードに接続する進入リンク以外のリンクの内、進入リンクに対して、直進方向に存在するリンクのみを対象に経路探索を続けることで、ランドマークが存在する交差点で右左折する経路を優先的に探索する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路地図データにもとづいて、自車位置から目的地までの積算コストが最小となる経路を探索するナビゲーション装置に関する。
【背景技術】
【0002】
ナビゲーション装置には、ユーザが所望の目的地に向けて道路を間違うことなく容易に走行できるようにした経路誘導機能が搭載されている。この経路誘導機能では、地図データを用いて出発地から目的地までを結ぶ最もコストが低い経路を横型探索法やダイクストラ法等のシミュレーション計算を行って探索する。そして、探索した経路を誘導経路として、地図上に誘導経路を他の道路とは色を変えて太く表示し、ユーザに提供している(図10)。
【0003】
なお、コストとは、距離を基に、道路幅員、道路種別(高速道路、一般道、また、一般道なら国道、都道府県道、市道、細街路など)、交差点での右折及び左折等に応じた定数を乗じた値や車両の走行予測時間などであり、誘導経路としての適正の程度を数値化したものである。距離が同一の2つの経路があったとしても、ユーザが例えば有料道路を使用するか、距離を優先するか、時間を優先するか、などを指定することによりコストは異なったものとなる。
【0004】
さらに、ナビゲーション装置では、上記記載の誘導経路の強調表示に加え、音声による案内も行っている。この種のナビゲーション装置では、経路に沿って車両を進めるために必要となる交差点の右左折を、交差点進入前に、その交差点に存在する目印となるランドマークの種類や名称などを案内することで、ユーザに対し、右左折する交差点を分かり易くしている。
例えば、経路探索した結果、誘導経路上の右左折すべき交差点付近にガソリンスタンドが存在し、車両がその交差点に近づくと、「この先、○○交差点を右折です。ガソリンスタンドが目印です。」などのメッセージを音声により出力する。(特許文献1)
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−207358号 公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記特許文献1記載のナビゲーション装置では、右左折する交差点に対して、ランドマークを用いた音声案内を行うことで、右左折する交差点を判別する際の曖昧性を減らすようにしている。しかし、誘導経路上で右左折する必要がある交差点において、ランドマークが存在しない場合には、ランドマーク情報を用いた目印案内が出来ないため、どの交差点で右左折したらよいかを判別することが難しく、ユーザが右左折すべき交差点を見落としてしまい、右左折する必要があるにも係らず、間違って直進してしまう場合がある。
通常、ナビゲーション装置では、最短の時間で目的地に到達する時間優先経路や、走行距離が最短となる距離優先経路などの経路を探索し、ユーザに提供するが、運転に不慣れなユーザにとっては、右左折する交差点を見落とし、誘導経路から逸脱してしまうのであれば、多少遠回りをしてでも、誘導経路から逸脱せずに、分かり易い経路で目的地まで行きたいと考える。
【0007】
以上のことから、本発明の目的は、ランドマークが存在する交差点を優先的に右左折ポイントとし、目的地までの経路を探索することで、ユーザにとって分かり易い経路を誘導経路として設定し、ユーザが誘導経路から逸脱することなく、目的地までの到着することが出来るナビゲーション装置を提供することである。
【課題を解決するための手段】
【0008】
上記課題を解決する為に、本発明のナビゲーション装置は、交差点を通過する際のコストを格納したノードデータと、前記交差点間の道路を通過する際のコストを格納したリンクデータと、を含む地図データを記憶する記憶部と、前記ノードデータとリンクデータとに基づいて目的地までの経路の積算コストが最小となる経路を探索する第1経路探索部と、を備えるナビゲーション装置であって、前記経路上の交差点の右折及び左折を音声案内する経路案内部と、前記経路案内部が交差点に存在する施設名を含んで交差点の右折及び左折を音声案内する交差点の右折及び左折を優先的に経路として探索する第2経路探索部と、前記第1経路探索部による経路探索または前記第2経路探索部による経路探索のいずれかを選択する選択画面を表示する表示部と、前記表示部に表示された選択画面から探索経路を選択操作する操作部と、を備えている。
【0009】
好ましくは、前記選択画面は、前記第1経路探索部で探索された経路および前記第2経路探索部で探索された経路をユーザが比較可能な画面である。
あるいは、前記選択画面は、前記第1経路探索部により経路探索を行うのか、前記第2経路探索部により経路探索を行うのかを経路探索前に選択する画面である。
【発明の効果】
【0010】
本発明によれば、ランドマーク情報を用いた目印案内が存在する交差点での右左折を優先的に行うように誘導経路を設定したことにより、ユーザが誘導経路から逸脱することなく、ユーザにとって分かり易い経路を提供することが可能となる。
【図面の簡単な説明】
【0011】
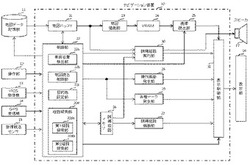
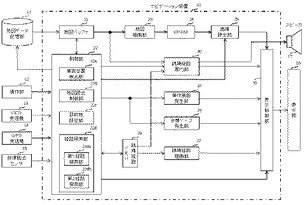
【図1】本発明の実施例に係るナビゲーション装置の構成図である。
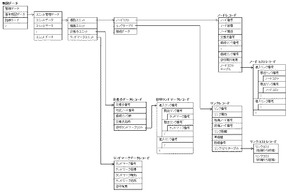
【図2】本発明の実施例に係る地図データの構成を示す図である。
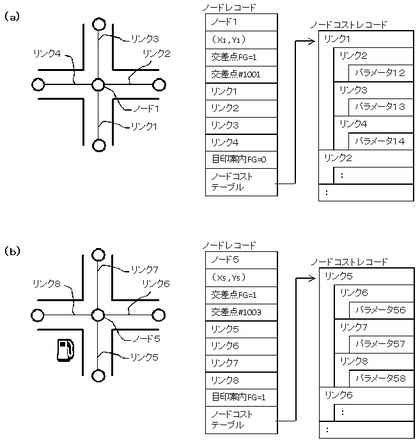
【図3】ノード(交差点)におけるノードレコードおよびノードコストレコードの格納例を示す図である。
【図4】本発明の実施例に係る誘導経路探索処理のフロー図である。
【図5】自車周辺地図画面の表示例を示す図である。
【図6】経路探索結果画面の表示例を示す図である。
【図7】誘導経路の表示例を示す図である。
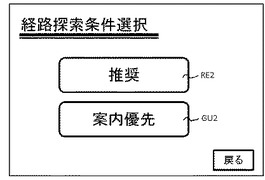
【図8】経路探索条件選択画面の表示例を示す図である。
【図9】本発明の変形例に係るノードコスト補正係数の記憶例を示す図である。
【図10】従来の誘導経路(時間優先条件)の表示例を示す図である。
【発明を実施するための形態】
【実施例】
【0012】
図1は本発明のナビゲーション装置10の構成図である。
地図データ記憶部11は、DVD、ハードディスクなどにより構成され、地図データが記録されている。そして、必要に応じて、地図読出制御部22bが地図データを地図バッファ21に読み出す。
ここで、地図データは、所定の地理的区域毎に図葉と呼ばれる矩形単位で管理されており、各図葉は地図の詳細度に応じた複数のレベルで構成されている。そして、各図葉の各レベルの地図は、1または複数のユニットからなり、各ユニットは、自身が属する図葉の地理的区域またはこれを分割した区域に対応し、対応区域の地図を、自身が属するレベルで表現したものである。
【0013】
そして、地図データは、図2に示すように、各ユニットと図葉、対応区域、レベルとの関係を記述した管理データ、地図を表す基本地図データ、各道路や各道路と基本地図データが表す地図との対応を管理する路線データとを含んで構成される。
そして、基本地図データは、前述したユニット毎のユニットデータと、各ユニットデータと図葉、対応区域、レベルとの関係を記述したユニット管理データを含み、各ユニットデータは道路ネットワークを表す道路ユニットと、地形図形や施設図形や地域名称や施設名称等の表示を含んだ地図の画像である背景地図画像を表す描画ユニットと、交差点の走行案内に用いる情報を格納した交差点ユニットと、各種施設の情報を格納したランドマークユニットとを有する。
【0014】
次に、道路ユニットは、ノードリストと、リンクテーブルと、他ユニットとのノードやリンクの接続、対応関係を記述した接続データとを有する。ここで、道路ユニットでは、道路を直線であるリンクの集合として表現しており、この各リンクの端点がノードである。このようなノードは、交差点等の道路の接続点に必ず設けられる他、隣接するユニットの境界に必ず設けられる。
【0015】
さて、ノードリストは、各ノードのノードレコードを含み、各ノードレコードは、ノード番号、ノードの座標、交通規制や当該ノードが交差点に対応するノードであるか等をフラグ情報として表すノード属性、ノード属性に交差点属性が付与されている場合、その交差点情報を示す交差点データレコードの交差点番号、ノードに接続するリンクのリンク番号を表す接続リンク番号、当該ノード付近に目印案内の対象となるランドマークが存在するか示す目印案内有無フラグ、経路探索用のノードコストテーブルが記述される。ノードコストテーブルは、各ノードのノードコストレコードを含み、各ノードコストレコードには、当該ノード(当該ノードレコードが示すノード)に接続するリンクから、当該ノードに接続するその他のリンクに脱出する際にかかるノードコストが、上記あるリンクのリンク番号を進入リンク番号、当該ノードに接続する他のリンクのリンク番号を脱出リンク番号として、当該ノードに接続するリンクの組み合わせ毎に、記述される。
【0016】
そして、リンクテーブルは、各リンクのリンクレコードを含み、各リンクレコードには、リンク番号、車線数等を表すリンク属性、リンクの始端となるノードの始端ノード番号、リンクの終端となるノードの終端ノード番号、リンクの距離、リンクに対応する道路区間の車線幅を表す車線幅情報、リンクが属する道路路線の路線番号、経路探索用のリンクコストテーブル等が記述される。リンクコストテーブルには、リンクの始端となるノード番号1からリンクの終端となるノード番号2へのリンクコストと、リンクの終端となるノード番号2からリンクの始端となるノード番号1へのリンクコストが記述される。
なお、ノードコストやリンクコストは、当該交差点や道路において予測される主要時間に対応した値が設定されている。
【0017】
次に、交差点ユニットは、交差点毎に設けられた交差点データレコードを有し、各交差点データレコードには、交差点の識別番号である交差点番号、交差点に対応するノードのノード番号、交差点に接続するリンク数、交差点の名称、目印ランドマークリストを有する。目印ランドマークリストは、当該交差点に接続するリンク毎に設けられた目印ランドマークリストを有し、各目印ランドマークリストは、各目印ランドマークの目印ランドマークレコードを含み、各目印ランドマークレコードは、対応するリンクから進入し当該交差点に接続する他のリンクに脱出する際に目印となる施設のランドマークのランドマーク番号が、対応するリンクのリンク番号を進入リンク番号、当該交差点に接続する他のリンクのリンク番号を脱出リンク番号として、当該交差点に接続する他のリンクと対応するリンクの組み合わせ毎に記述される。ここで、進入リンクから脱出リンクへの脱出に対し、目印ランドマークが存在しない場合、ランドマーク番号は格納されない(あるいは、存在しない事を示すデータを格納する)。
【0018】
次に、ランドマークユニットは、施設毎に設けたランドマークデータレコードを有し、各ランドマークデータレコードは、その施設の識別番号であるランドマーク番号、ランドマークの座標、その施設のガソリンスタンド、郵便局、コンビニエンスストア等の種別を表すランドマーク種別、その施設の名称を表すランドマーク名称、目印有無を有する。そして、目印有無には、その施設が、交差点ユニットの、いずれかの交差点データレコードの目印ランドマークレコードに目印ランドマーク番号として登録されているかどうか、すなわち、そのランドマークがいずれかの交差点通過の目印として使用されているかどうかの識別を登録する。
【0019】
図1に戻り、操作部12は、ナビゲーション装置10を操作するものであり、リモコン、ハードキー、タッチパネルなどで構成され、所定の操作が入力されると、当該操作に対する所定のコマンドが、ナビゲーション装置10の制御部22に出力される。
VICS(登録商標)受信機13は、交通情報の送信元(提供者)から送信された交通情報を受信し、制御部22に出力する。
この交通情報は、現在の混雑具合(渋滞具合)や、工事による通行禁止情報、交通事故情報などの情報であり、道路ユニットのリンクレコードに対応付けされ、渋滞情報の表示や、経路探索時に利用される。
GPS受信機14は、GPS(Global Positioning System)衛星から配信されるGPS情報(時刻や軌道に関する情報)を受信し、受信したGPS情報を、制御部22に出力する。
【0020】
自律航法センサ15は、車両回転角度を検出するジャイロなどの角度センサや一定走行距離毎にパルスを発生する距離センサ等からなり、車両の車速、加速度(角速度)および、自車方位等を検出し、検出結果を、制御部22に出力する。
表示部16は、ナビゲーション装置10からの指示に従って、表示制御部31から出力される画像及び画面を表示する。例えば、自車周辺地図画面、経路案内画面、交差点案内画面、目的地選択画面、各種メニュー画面、経路探索結果画面等を表示する。
スピーカ17は、車両が案内交差点から所定距離(例えば、300m)の地点に到着すると、誘導経路案内部30から音声メッセージが出力され、そのメッセージを音声にて案内する。
【0021】
地図バッファ21は、地図読出制御部22bが地図データ記憶部11から読み出した地図データを保存する。
制御部22は、ナビゲーション装置10の全体を制御し、車両位置検出部22a、地図読出制御部22b、目的地設定部22c、経路探索部22dで構成され、入力される各種情報、コマンドに基づいて、(1)車両の現在位置の検出制御、(2)車両周辺の地図データを地図バッファ21に読み出す地図読み出し制御、(3)マップマッチング制御、(4)目的地設定制御、(5)経路探索制御等を実行する。
【0022】
車両位置検出部22aは、GPS受信機14および自律航法センサ15から入力される情報を基に、自車位置を検出する。検出した自車位置は、各種マーク発生部29に出力される。また、経路探索部22dにて出発地点として、誘導経路案内部30にて経路案内を行うタイミングの情報として利用される。
地図読出制御部22bは、車両位置検出部22aが検出した自車位置周辺の地図データを、地図バッファ21に読み出す。
目的地設定部22cは、操作画面発生部28が生成した目的地選択画面から、目的地として設定したい施設や地点をアドレス検索や、施設名称検索、ジャンル検索、電話番号検索等の機能を用いて検索し、選択すると、その選択された施設を目的地として設定する。
設定された目的地は、経路探索部22dに出力される。
【0023】
経路探索部22dは、車両位置検出部22aが検出した自車位置から目的地設定部22cが設定した目的地までの経路を、ダイクストラ法を用いて、各種経路探索条件に応じて、探索する。ここで、経路探索条件には、目的地までの所要時間が最短である推奨条件(時間優先条件)と、本発明に係る案内優先条件が、予め設定されている。そして、経路探索部22dは、探索条件に応じた経路の探索結果を受け、ユーザより所望の探索条件が選択されると、その探索条件により探索した経路を誘導経路として設定し、誘導経路メモリ26に記憶させる。
このダイクストラ法とは、あるノード(例えば出発地)に接続するすべてのリンクのコストを計算し、一段階分(1ノード分)の展開が終了するとコストの順に並べ替えを行う。そして、未完成経路を展開するものとしないものに分け、展開するものをさらに順に展開していく。これを繰り返し行い、最終的に所定のノード(目的地)に到達するまでの積算コストが、最小となる経路を求めるアルゴリズムである。この時のリンクコストおよびノードコストは、予め地図データに記憶されている値を利用する。
【0024】
この経路探索部22dは、経路探索条件別に、第1経路探索部22daと、第2経路探索部22dbとにより、構成される。
【0025】
第1経路探索部22daでは、推奨条件に応じた経路探索を行い、ノードコストおよびリンクコストは、地図データに記憶されている値を利用する。ただし、VICS受信機13から渋滞情報を受信すると、その受信した渋滞情報に紐づくリンクのリンクコストに対し、所定の値を乗算(あるいは加算)した値を利用する。
この第1経路探索部22daによる推奨条件に応じた経路探索では、ノードからリンクへ探索枝を延ばす際に、当該ノードに接続する進入リンク以外のリンク全てを対象に経路探索を行う。
【0026】
続いて、第1経路探索部22daが、ノードからリンクへ探索枝を延ばす際の処理について説明する。
経路探索時に探索枝がノードに到達すると、当該ノードに進入してきたリンクを進入リンクに、当該ノードを通過し脱出するリンクを脱出リンクに設定する。このとき、当該進入リンク番号と、当該脱出リンク番号を確認し、当該進入リンク番号と当該脱出リンク番号の組み合わせに紐づくノードコストの値をノードコストレコードから確認する。そして、ダイクストラ法による経路探索のコスト計算を、目的地に達するまで同様に続ける。
【0027】
具体的には、図3−(a)に示す交差点(ノード1)において、リンク1からノード1へ進入し、その次の探索枝を考慮する際、第1経路探索部22daは、まず、リンク1を進入リンク、リンク2を脱出リンクに設定する。その後、ノード1のノードレコードに格納されるノードコストテーブルを確認し、ノードコストレコードに格納される進入リンク番号(リンク1)と脱出リンク番号(リンク2)の組み合わせに紐づくノードコストの値(パラメータ12)を取得し、コスト計算を行う。
同様に、脱出リンクとしてリンク3、リンク4に対しても行い、ノード1に接続するリンクに対して、コスト計算を行うことで、経路を特定していく。
【0028】
また、図3−(b)に示す交差点(ノード5)において、リンク5からノード5に進入し、その次の探索枝を考慮する際、第1経路探索部22daは、まず、リンク5を進入リンク、リンク6を脱出リンクに設定する。その後、ノード5のノードレコードに格納されるノードコストテーブルを確認し、ノードコストレコードに格納される進入リンク番号(リンク5)と脱出リンク番号(リンク6)の組み合わせに紐づくノードコストの値(パラメータ56)を取得し、コスト計算を行う。
同様に、脱出リンクとしてリンク7、リンク8に対しても行い、ノード5に接続するリンクに対して、コスト計算を行うことで、経路を特定していく。
【0029】
第2経路探索部22dbでは、本発明に係る案内優先条件に応じた経路探索を行い、ノードコストおよびリンクコストは、地図データに記憶されている値を利用する。
この第2経路探索部22dbによる案内優先条件に応じた経路探索では、ノードからリンクへ探索枝を延ばす際に、当該ノードが示す交差点で右左折すると目印案内を行うか否かを確認する。そして、目印案内を行う場合には、当該ノードに接続する進入リンク以外のリンク全てを対象に経路探索を行い、目印案内を行わない場合には、当該ノードに接続する進入リンク以外のリンクの内、進入リンクに対して、直進方向に存在するリンクのみを対象に経路探索を行う。ここで直進方向とは、進入リンクに対して、接続するノードを中心に所定の角度(例えば、150°〜210°)内に存在するリンクであることや、進入リンクと道路名称や道路種別、道路属性が同じリンクであることなどにより、判断することができる。
【0030】
続いて、第2経路探索部22dbが、ノードからリンクへ探索枝を延ばす際の処理について説明する。
経路探索時に探索枝がノードに到達すると、当該ノードに進入してきたリンクを進入リンクに設定し、当該ノードのノードレコードの目印案内有無フラグを確認する。ここで、目印案内有無フラグに「0」が格納されている場合、当該交差点付近にランドマークが存在せず、目印案内を行わない交差点であると判断され、当該ノードでの右左折は行わないように、進入リンクに対し直進方向に存在するリンクだけを脱出リンクの候補とする。一方、目印案内有無フラグに「1」が格納されている場合、当該交差点付近にランドマークが存在し、目印案内を行う交差点であると判断され、進入リンク以外の当該ノードに接続する全てのリンクに対し、脱出リンクの候補となる。
その後、この候補となった脱出リンク毎に、進入リンクと脱出リンクを基に、ノードコストレコードからノードコストを確認し、ダイクストラ法による経路探索のコスト計算を、目的地に達するまで同様に続ける。
【0031】
具体的には、図3−(a)に示す交差点(ノード1)において、リンク1からノード1へ進入し、その次の探索枝を考慮する際、第2経路探索部22daは、まず、リンク1を進入リンクに設定する。そして、ノード1のノードレコードの目印案内有無フラグを確認し、その目印案内有無フラグに「0」が格納されているため、ノード1で示す交差点付近には目印案内の対象となるランドマークが存在せず、目印案内を行わない交差点であると判断し、リンク1に対して直進方向に存在するリンクを脱出リンクの候補とする。
その結果、リンク3を脱出リンクに設定し、ノード1のノードレコードに格納されるノードコストテーブルを確認し、ノードコストレコードに格納される進入リンク番号(リンク1)と脱出リンク番号(リンク3)の組み合わせに紐づくノードコストの値(パラメータ13)を取得し、コスト計算を行い、経路を特定していく。
【0032】
また、図3−(b)に示す交差点(ノード5)において、リンク5からノード5に進入し、その次の探索枝を考慮する際、第2経路探索部22dbは、まずリンク5を進入リンクに設定する。そして、ノード5のノードレコードの目印案内有無フラグを確認し、その目印案内有無フラグに「1」が格納されているため、ノード5で示す交差点付近には目印案内の対象となるランドマークが存在し、目印案内を行う交差点であると判断し、リンク5以外のノード5に接続する全てのリンクを脱出リンクの候補とする。
そして、脱出リンク毎にコスト計算を行うので、まずリンク6を脱出リンクに設定し、ノード1のノードレコードに格納されるノードコストテーブルを確認し、ノードコストレコードに格納される進入リンク番号(リンク5)と脱出リンク番号(リンク6)の組み合わせに紐づくノードコストの値(パラメータ56)を取得し、コスト計算を行う。
同様に、脱出リンクとしてリンク7、リンク8に対しても行い、ノード5に接続するリンクに対して、コスト計算を行うことで、経路を特定していく。
【0033】
再び、図1に戻り、地図描画部23は、地図バッファ21に読み出された地図データを用いて、自車位置周辺の地図画像を生成してVRAM24に書込み、画像読出部25は制御部22からの指示に従ってVRAM24から所定の画像部分を切り取った地図画像を読み出し、表示制御部31に出力する。
誘導経路メモリ26は、制御部22の経路探索部22dにより探索、設定された誘導経路を構成する全ノードの位置データを出発地から目的地まで通行順に記録する。そして、その誘導経路を、誘導経路描画部27と誘導経路案内部30に出力する。
誘導経路描画部27は、誘導経路メモリ26に記憶される誘導経路情報を用いて、誘導経路を強調表示した誘導経路画像を生成して、表示制御部31に出力する。
操作画面発生部28は、目的地選択画面や各種設定画面等を生成して表示制御部31に出力し、各種マーク発生部29は、自車位置マークやカーソル等の各種マークを生成して表示制御部31に出力する。
【0034】
誘導経路案内部30は、現在の自車位置と誘導経路情報を参照して案内交差点から所定距離の地点に到達したか確認し、到達すれば、当該案内交差点における交差点案内を表示制御部31に出力するとともに、スピーカ17から音声案内メッセージを出力する。具体的には、実際の経路誘導時に、自車が案内交差点から所定距離(例えば、300m)の地点に到達すれば、誘導経路案内部30は、交差点案内図(交差点拡大図、進行方向矢印、残距離等)を表示制御部31に出力し、表示制御部31が表示部16に表示する。それと同時に、当該案内交差点までの距離、進行方向(左折/右折の別)を案内する通常交差点案内、もしくは通常交差点案内に交差点付近に存在するランドマークの情報を用いた音声案内メッセージ(目印案内)を生成し、スピーカ17を介して、案内する。例えば、音声案内メッセージの一例として、通常交差点案内は案内交差点までの距離、進行方向を案内するので、「この先、300m先左折です。」という案内となり、目印案内では、通常交差点案内に、交差点付近に存在するランドマーク情報も付加するため、「この先、300m先左折です。ガソリンスタンドが目印です。」となる。
【0035】
この音声による交差点案内の処理について説明する。
誘導経路案内部30は、現在の自車位置と誘導経路情報を参照して案内交差点から所定距離の地点に到達した時に、当該案内交差点に対する進入リンクと脱出リンクを特定する。そして、特定した進入リンクと脱出リンクから目印ランドマークレコードに、進入リンクと脱出リンクの組み合わせに対し、ランドマーク番号が格納されているかを確認する。この時、ランドマーク番号が格納されていると、当該ランドマーク番号を参照し、ランドマークデータレコードから当該ランドマークに対する情報を取得することで、ランドマークの情報を付加した目印案内を行う。一方、ランドマーク番号が格納されていない場合、当該交差点は、ランドマークを用いた目印案内を行わないため、通常交差点案内を行う。
【0036】
表示制御部31は、画像読出部25がVRAM24から読み出し、切り取った地図画像に、各種マーク発生部29が生成した各種マークや、誘導経路描画部27が生成した誘導経路画像、誘導経路案内部30が生成した交差点拡大図を適宜合成し、表示部16に表示する。また、操作画面発生部28が生成した各種メニュー画面を表示部16に表示する。例えば、自車位置マークと自車位置周辺の地図画像を合成した自車周辺地図画面や、自車周辺地図画面に誘導経路画像を重ね合わせた経路案内画面、さらに、経路案内画面と交差点拡大図画像を同時に表示する交差点案内画面等を生成する。
また、操作画面発生部28が生成した目的地選択画面や、各種メニュー画面、経路探索部22dから出力される経路探索結果画面等、ユーザ操作に応じて、表示部16に表示する。
【0037】
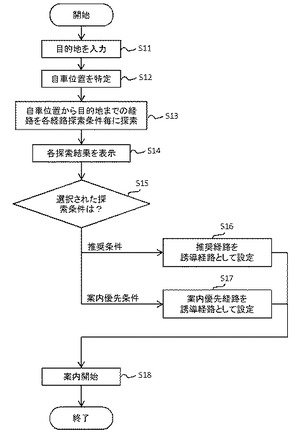
次に、本発明に係るナビゲーション装置10の誘導経路探索処理について、図4を用いて説明する。
ユーザが操作部12から目的地選択画面表示操作を行うと、制御部22は、操作画面発生部28に対し、目的地選択画面の表示指示を出力する。その後、操作画面発生部28は、表示制御部31を介して、表示部16に目的地選択画面を表示する。そして、ユーザが、この画面に基づいて所定の操作を行って目的地を選択すると、目的地設定部22aは、ユーザが選択した施設を目的地として設定し、この目的地の位置情報を経路探索部22dに出力する(S11)。
また、ユーザが目的地を設定すると、車両位置検出部22cは、GPS受信機14と自律航法センサ15から出力される情報を基に、自車の車両位置を特定して、経路探索部22dに出力する(S12)。
【0038】
経路探索部22dは、目的地設定部22cから出力された目的地の位置情報と車両位置検出部22cから出力された自車位置を使用して、経路探索部22dは、自車位置から目的地までの経路探索を開始する。
このとき、経路探索部22dの第1経路探索部22daと第2経路探索部22dbのそれぞれが、自車位置から目的地までの経路を探索する(S13)。
【0039】
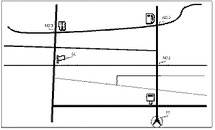
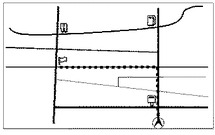
具体的には、図5に示す経路探索を開始する前の状況において、ユーザ操作により目的地が選択され、目的地設定部22cが目的地として地点GLを設定すると、車両位置検出部22aは自車位置STを特定する。そして、これらの情報が、経路探索部22dに出力され、自車位置STから目的地GLまでの経路を探索する。
この時、経路探索部22dの第1経路探索部22daは、コスト計算の結果、自車位置STから交差点ND1を左折し、目的地GLに到達する経路を探索する。
【0040】
一方、経路探索部22dの第2経路探索部22dbは、第1経路探索部22daの探索結果で左折した交差点ND1では左折せず直進し、交差点ND2、ND3で左折する経路を探索する。なぜなら、交差点ND1はランドマークを用いた目印案内を行う交差点でなく、交差点ND2、ND3はランドマークを用いた目印案内を行う交差点であるため、交差点ND1での右左折は探索対象外となる。その結果、コスト計算により、交差点ND1で左折するより、交差点ND2、ND3を経由する経路が探索されるからである。そして、コスト計算の結果、自車位置STから交差点ND2を左折し、その後、交差点ND3を左折し、目的地GLに到達する経路を探索する。
経路探索部22dの第1経路探索部22daと第2経路探索部22dbが経路探索を終了すると、その探索結果を、経路探索部22dから表示制御部31に出力し、表示制御部31は図6に示す経路探索結果を表示する(S14)。
【0041】
その後、ユーザが経路探索結果画面から所望する経路を操作部12より選択する。このとき、推奨条件選択キーRE1が押下され、推奨条件(推奨経路)が選択されると(S15の推奨条件)、経路探索部22dは、第1経路探索部22daが探索した経路を誘導経路に設定し、誘導経路メモリ26に出力する(S16)。
一方、案内優先条件選択キーGU1が押下され、案内優先条件(案内優先経路)が選択されると(S15の案内優先条件)、経路探索部22dは、第2経路探索部22dbが探索した経路を誘導経路に設定し、誘導経路メモリ26に出力する(S17)。
【0042】
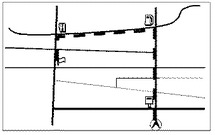
そして、誘導経路メモリ26は、経路探索部22dから入力された誘導経路の情報を記憶しておき、誘導経路描画部27が、誘導経路メモリ26に記憶されている誘導経路情報を用いて、誘導経路を強調表示した誘導経路画像を生成する。そして、表示制御部31は、自車周辺地図画面と合成した誘導案内画面(図7)を生成し、表示部16に表示する。
さらに、誘導経路案内部30が、誘導経路メモリ26に記憶されている誘導経路情報から交差点拡大図を生成し、表示制御部31を介して、交差点案内画面を表示部16に表示する処理や、誘導経路案内部30が、誘導経路メモリ26に記憶されている誘導経路情報からランドマークを用いた目印案内をスピーカ17に出力し、音声案内を行う処理等、自車両の走行に合わせ、経路案内を開始する(S18)。
【0043】
上記の構成と処理により、第1経路探索部22daが探索した推奨条件による経路探索結果と第2経路探索部22dbが探索した案内優先条件による経路探索結果とをユーザが比較可能にした画面(図6)を表示させるようにしたため、ユーザは、上記2つの経路探索条件による経路探索結果を確認し、誘導経路として設定したい経路探索条件を選択することができる。
【0044】
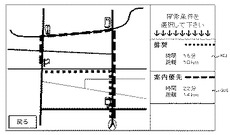
なお、本実施例では、目的地選択後、推奨条件と案内優先条件との両条件による経路探索をそれぞれ行い、その結果を表示してから誘導経路とする経路条件をユーザに選択させる例を説明したが、これに限らず、製品仕様にあわせ、例えば、目的地選択後、経路探索部22dが経路探索を行う前に、図8のような経路探索条件選択画面を表示させ、経路探索よりも先に経路探索条件を選択するようにしてもよい。この場合、目的地選択後、操作画面発生部28が経路探索条件選択画面(図8)を生成し、表示部16に表示させ、それ基に、ユーザが経路探索条件を選択する。その後、選択された経路探索条件に応じて、第1経路探索部22daもしくは第2経路探索部22dbが経路探索を行い、その結果を表示部16に表示させる。そして、表示した経路探索結果を基にユーザが、当該経路を誘導経路する設定操作を行うと、経路案内が開始される。
このようにすることで、選択された1つの経路探索条件による経路探索だけを行うようになるため、余計な経路探索を行う必要がなく、経路探索処理の負荷が低減される。
【0045】
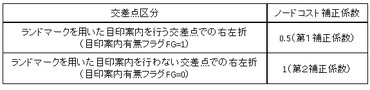
また、本実施例の第2経路探索部22dbは、交差点付近に目印案内の対象となるランドマークが存在するかを確認し、存在しない場合は、進入リンクに対し直進方向に存在するリンクのみを脱出リンクの候補として探索するようにしたが、これに限らず、第2経路探索部22dbにノードコスト補正係数(図9)を記憶させておき、経路探索時に、交差点付近に目印案内の対象となるランドマークが存在するか否か確認し、その存在有無に応じてノードコスト補正係数を乗算した値をノードコストとして利用するようにすることも可能である。
このようにすることでも目印案内を行う交差点での右左折を優先的に経路として設定することが可能となる。
【符号の説明】
【0046】
10 ナビゲーション装置
11 地図データ記憶部
12 操作部
13 VICS受信機
14 GPS受信機
15 自律航法センサ
16 表示部
17 スピーカ
21 地図バッファ
22 制御部
22a 車両位置検出部
22b 地図読出制御部
22c 目的地設定部
22d 経路探索部
22da 第1経路探索部
22db 第2経路探索部
23 地図描画部
24 VRAM
25 画像読出部
26 誘導経路メモリ
27 誘導経路描画部
28 操作画面発生部
29 各種マーク発生部
30 誘導経路案内部
31 表示制御部
ST 自車位置マーク
ND1、ND2、ND3 交差点(ノード)
GL 目的地
RE1、RE2 推奨条件選択キー
GU1、GU2 案内優先条件選択キー
【技術分野】
【0001】
本発明は、道路地図データにもとづいて、自車位置から目的地までの積算コストが最小となる経路を探索するナビゲーション装置に関する。
【背景技術】
【0002】
ナビゲーション装置には、ユーザが所望の目的地に向けて道路を間違うことなく容易に走行できるようにした経路誘導機能が搭載されている。この経路誘導機能では、地図データを用いて出発地から目的地までを結ぶ最もコストが低い経路を横型探索法やダイクストラ法等のシミュレーション計算を行って探索する。そして、探索した経路を誘導経路として、地図上に誘導経路を他の道路とは色を変えて太く表示し、ユーザに提供している(図10)。
【0003】
なお、コストとは、距離を基に、道路幅員、道路種別(高速道路、一般道、また、一般道なら国道、都道府県道、市道、細街路など)、交差点での右折及び左折等に応じた定数を乗じた値や車両の走行予測時間などであり、誘導経路としての適正の程度を数値化したものである。距離が同一の2つの経路があったとしても、ユーザが例えば有料道路を使用するか、距離を優先するか、時間を優先するか、などを指定することによりコストは異なったものとなる。
【0004】
さらに、ナビゲーション装置では、上記記載の誘導経路の強調表示に加え、音声による案内も行っている。この種のナビゲーション装置では、経路に沿って車両を進めるために必要となる交差点の右左折を、交差点進入前に、その交差点に存在する目印となるランドマークの種類や名称などを案内することで、ユーザに対し、右左折する交差点を分かり易くしている。
例えば、経路探索した結果、誘導経路上の右左折すべき交差点付近にガソリンスタンドが存在し、車両がその交差点に近づくと、「この先、○○交差点を右折です。ガソリンスタンドが目印です。」などのメッセージを音声により出力する。(特許文献1)
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−207358号 公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記特許文献1記載のナビゲーション装置では、右左折する交差点に対して、ランドマークを用いた音声案内を行うことで、右左折する交差点を判別する際の曖昧性を減らすようにしている。しかし、誘導経路上で右左折する必要がある交差点において、ランドマークが存在しない場合には、ランドマーク情報を用いた目印案内が出来ないため、どの交差点で右左折したらよいかを判別することが難しく、ユーザが右左折すべき交差点を見落としてしまい、右左折する必要があるにも係らず、間違って直進してしまう場合がある。
通常、ナビゲーション装置では、最短の時間で目的地に到達する時間優先経路や、走行距離が最短となる距離優先経路などの経路を探索し、ユーザに提供するが、運転に不慣れなユーザにとっては、右左折する交差点を見落とし、誘導経路から逸脱してしまうのであれば、多少遠回りをしてでも、誘導経路から逸脱せずに、分かり易い経路で目的地まで行きたいと考える。
【0007】
以上のことから、本発明の目的は、ランドマークが存在する交差点を優先的に右左折ポイントとし、目的地までの経路を探索することで、ユーザにとって分かり易い経路を誘導経路として設定し、ユーザが誘導経路から逸脱することなく、目的地までの到着することが出来るナビゲーション装置を提供することである。
【課題を解決するための手段】
【0008】
上記課題を解決する為に、本発明のナビゲーション装置は、交差点を通過する際のコストを格納したノードデータと、前記交差点間の道路を通過する際のコストを格納したリンクデータと、を含む地図データを記憶する記憶部と、前記ノードデータとリンクデータとに基づいて目的地までの経路の積算コストが最小となる経路を探索する第1経路探索部と、を備えるナビゲーション装置であって、前記経路上の交差点の右折及び左折を音声案内する経路案内部と、前記経路案内部が交差点に存在する施設名を含んで交差点の右折及び左折を音声案内する交差点の右折及び左折を優先的に経路として探索する第2経路探索部と、前記第1経路探索部による経路探索または前記第2経路探索部による経路探索のいずれかを選択する選択画面を表示する表示部と、前記表示部に表示された選択画面から探索経路を選択操作する操作部と、を備えている。
【0009】
好ましくは、前記選択画面は、前記第1経路探索部で探索された経路および前記第2経路探索部で探索された経路をユーザが比較可能な画面である。
あるいは、前記選択画面は、前記第1経路探索部により経路探索を行うのか、前記第2経路探索部により経路探索を行うのかを経路探索前に選択する画面である。
【発明の効果】
【0010】
本発明によれば、ランドマーク情報を用いた目印案内が存在する交差点での右左折を優先的に行うように誘導経路を設定したことにより、ユーザが誘導経路から逸脱することなく、ユーザにとって分かり易い経路を提供することが可能となる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施例に係るナビゲーション装置の構成図である。
【図2】本発明の実施例に係る地図データの構成を示す図である。
【図3】ノード(交差点)におけるノードレコードおよびノードコストレコードの格納例を示す図である。
【図4】本発明の実施例に係る誘導経路探索処理のフロー図である。
【図5】自車周辺地図画面の表示例を示す図である。
【図6】経路探索結果画面の表示例を示す図である。
【図7】誘導経路の表示例を示す図である。
【図8】経路探索条件選択画面の表示例を示す図である。
【図9】本発明の変形例に係るノードコスト補正係数の記憶例を示す図である。
【図10】従来の誘導経路(時間優先条件)の表示例を示す図である。
【発明を実施するための形態】
【実施例】
【0012】
図1は本発明のナビゲーション装置10の構成図である。
地図データ記憶部11は、DVD、ハードディスクなどにより構成され、地図データが記録されている。そして、必要に応じて、地図読出制御部22bが地図データを地図バッファ21に読み出す。
ここで、地図データは、所定の地理的区域毎に図葉と呼ばれる矩形単位で管理されており、各図葉は地図の詳細度に応じた複数のレベルで構成されている。そして、各図葉の各レベルの地図は、1または複数のユニットからなり、各ユニットは、自身が属する図葉の地理的区域またはこれを分割した区域に対応し、対応区域の地図を、自身が属するレベルで表現したものである。
【0013】
そして、地図データは、図2に示すように、各ユニットと図葉、対応区域、レベルとの関係を記述した管理データ、地図を表す基本地図データ、各道路や各道路と基本地図データが表す地図との対応を管理する路線データとを含んで構成される。
そして、基本地図データは、前述したユニット毎のユニットデータと、各ユニットデータと図葉、対応区域、レベルとの関係を記述したユニット管理データを含み、各ユニットデータは道路ネットワークを表す道路ユニットと、地形図形や施設図形や地域名称や施設名称等の表示を含んだ地図の画像である背景地図画像を表す描画ユニットと、交差点の走行案内に用いる情報を格納した交差点ユニットと、各種施設の情報を格納したランドマークユニットとを有する。
【0014】
次に、道路ユニットは、ノードリストと、リンクテーブルと、他ユニットとのノードやリンクの接続、対応関係を記述した接続データとを有する。ここで、道路ユニットでは、道路を直線であるリンクの集合として表現しており、この各リンクの端点がノードである。このようなノードは、交差点等の道路の接続点に必ず設けられる他、隣接するユニットの境界に必ず設けられる。
【0015】
さて、ノードリストは、各ノードのノードレコードを含み、各ノードレコードは、ノード番号、ノードの座標、交通規制や当該ノードが交差点に対応するノードであるか等をフラグ情報として表すノード属性、ノード属性に交差点属性が付与されている場合、その交差点情報を示す交差点データレコードの交差点番号、ノードに接続するリンクのリンク番号を表す接続リンク番号、当該ノード付近に目印案内の対象となるランドマークが存在するか示す目印案内有無フラグ、経路探索用のノードコストテーブルが記述される。ノードコストテーブルは、各ノードのノードコストレコードを含み、各ノードコストレコードには、当該ノード(当該ノードレコードが示すノード)に接続するリンクから、当該ノードに接続するその他のリンクに脱出する際にかかるノードコストが、上記あるリンクのリンク番号を進入リンク番号、当該ノードに接続する他のリンクのリンク番号を脱出リンク番号として、当該ノードに接続するリンクの組み合わせ毎に、記述される。
【0016】
そして、リンクテーブルは、各リンクのリンクレコードを含み、各リンクレコードには、リンク番号、車線数等を表すリンク属性、リンクの始端となるノードの始端ノード番号、リンクの終端となるノードの終端ノード番号、リンクの距離、リンクに対応する道路区間の車線幅を表す車線幅情報、リンクが属する道路路線の路線番号、経路探索用のリンクコストテーブル等が記述される。リンクコストテーブルには、リンクの始端となるノード番号1からリンクの終端となるノード番号2へのリンクコストと、リンクの終端となるノード番号2からリンクの始端となるノード番号1へのリンクコストが記述される。
なお、ノードコストやリンクコストは、当該交差点や道路において予測される主要時間に対応した値が設定されている。
【0017】
次に、交差点ユニットは、交差点毎に設けられた交差点データレコードを有し、各交差点データレコードには、交差点の識別番号である交差点番号、交差点に対応するノードのノード番号、交差点に接続するリンク数、交差点の名称、目印ランドマークリストを有する。目印ランドマークリストは、当該交差点に接続するリンク毎に設けられた目印ランドマークリストを有し、各目印ランドマークリストは、各目印ランドマークの目印ランドマークレコードを含み、各目印ランドマークレコードは、対応するリンクから進入し当該交差点に接続する他のリンクに脱出する際に目印となる施設のランドマークのランドマーク番号が、対応するリンクのリンク番号を進入リンク番号、当該交差点に接続する他のリンクのリンク番号を脱出リンク番号として、当該交差点に接続する他のリンクと対応するリンクの組み合わせ毎に記述される。ここで、進入リンクから脱出リンクへの脱出に対し、目印ランドマークが存在しない場合、ランドマーク番号は格納されない(あるいは、存在しない事を示すデータを格納する)。
【0018】
次に、ランドマークユニットは、施設毎に設けたランドマークデータレコードを有し、各ランドマークデータレコードは、その施設の識別番号であるランドマーク番号、ランドマークの座標、その施設のガソリンスタンド、郵便局、コンビニエンスストア等の種別を表すランドマーク種別、その施設の名称を表すランドマーク名称、目印有無を有する。そして、目印有無には、その施設が、交差点ユニットの、いずれかの交差点データレコードの目印ランドマークレコードに目印ランドマーク番号として登録されているかどうか、すなわち、そのランドマークがいずれかの交差点通過の目印として使用されているかどうかの識別を登録する。
【0019】
図1に戻り、操作部12は、ナビゲーション装置10を操作するものであり、リモコン、ハードキー、タッチパネルなどで構成され、所定の操作が入力されると、当該操作に対する所定のコマンドが、ナビゲーション装置10の制御部22に出力される。
VICS(登録商標)受信機13は、交通情報の送信元(提供者)から送信された交通情報を受信し、制御部22に出力する。
この交通情報は、現在の混雑具合(渋滞具合)や、工事による通行禁止情報、交通事故情報などの情報であり、道路ユニットのリンクレコードに対応付けされ、渋滞情報の表示や、経路探索時に利用される。
GPS受信機14は、GPS(Global Positioning System)衛星から配信されるGPS情報(時刻や軌道に関する情報)を受信し、受信したGPS情報を、制御部22に出力する。
【0020】
自律航法センサ15は、車両回転角度を検出するジャイロなどの角度センサや一定走行距離毎にパルスを発生する距離センサ等からなり、車両の車速、加速度(角速度)および、自車方位等を検出し、検出結果を、制御部22に出力する。
表示部16は、ナビゲーション装置10からの指示に従って、表示制御部31から出力される画像及び画面を表示する。例えば、自車周辺地図画面、経路案内画面、交差点案内画面、目的地選択画面、各種メニュー画面、経路探索結果画面等を表示する。
スピーカ17は、車両が案内交差点から所定距離(例えば、300m)の地点に到着すると、誘導経路案内部30から音声メッセージが出力され、そのメッセージを音声にて案内する。
【0021】
地図バッファ21は、地図読出制御部22bが地図データ記憶部11から読み出した地図データを保存する。
制御部22は、ナビゲーション装置10の全体を制御し、車両位置検出部22a、地図読出制御部22b、目的地設定部22c、経路探索部22dで構成され、入力される各種情報、コマンドに基づいて、(1)車両の現在位置の検出制御、(2)車両周辺の地図データを地図バッファ21に読み出す地図読み出し制御、(3)マップマッチング制御、(4)目的地設定制御、(5)経路探索制御等を実行する。
【0022】
車両位置検出部22aは、GPS受信機14および自律航法センサ15から入力される情報を基に、自車位置を検出する。検出した自車位置は、各種マーク発生部29に出力される。また、経路探索部22dにて出発地点として、誘導経路案内部30にて経路案内を行うタイミングの情報として利用される。
地図読出制御部22bは、車両位置検出部22aが検出した自車位置周辺の地図データを、地図バッファ21に読み出す。
目的地設定部22cは、操作画面発生部28が生成した目的地選択画面から、目的地として設定したい施設や地点をアドレス検索や、施設名称検索、ジャンル検索、電話番号検索等の機能を用いて検索し、選択すると、その選択された施設を目的地として設定する。
設定された目的地は、経路探索部22dに出力される。
【0023】
経路探索部22dは、車両位置検出部22aが検出した自車位置から目的地設定部22cが設定した目的地までの経路を、ダイクストラ法を用いて、各種経路探索条件に応じて、探索する。ここで、経路探索条件には、目的地までの所要時間が最短である推奨条件(時間優先条件)と、本発明に係る案内優先条件が、予め設定されている。そして、経路探索部22dは、探索条件に応じた経路の探索結果を受け、ユーザより所望の探索条件が選択されると、その探索条件により探索した経路を誘導経路として設定し、誘導経路メモリ26に記憶させる。
このダイクストラ法とは、あるノード(例えば出発地)に接続するすべてのリンクのコストを計算し、一段階分(1ノード分)の展開が終了するとコストの順に並べ替えを行う。そして、未完成経路を展開するものとしないものに分け、展開するものをさらに順に展開していく。これを繰り返し行い、最終的に所定のノード(目的地)に到達するまでの積算コストが、最小となる経路を求めるアルゴリズムである。この時のリンクコストおよびノードコストは、予め地図データに記憶されている値を利用する。
【0024】
この経路探索部22dは、経路探索条件別に、第1経路探索部22daと、第2経路探索部22dbとにより、構成される。
【0025】
第1経路探索部22daでは、推奨条件に応じた経路探索を行い、ノードコストおよびリンクコストは、地図データに記憶されている値を利用する。ただし、VICS受信機13から渋滞情報を受信すると、その受信した渋滞情報に紐づくリンクのリンクコストに対し、所定の値を乗算(あるいは加算)した値を利用する。
この第1経路探索部22daによる推奨条件に応じた経路探索では、ノードからリンクへ探索枝を延ばす際に、当該ノードに接続する進入リンク以外のリンク全てを対象に経路探索を行う。
【0026】
続いて、第1経路探索部22daが、ノードからリンクへ探索枝を延ばす際の処理について説明する。
経路探索時に探索枝がノードに到達すると、当該ノードに進入してきたリンクを進入リンクに、当該ノードを通過し脱出するリンクを脱出リンクに設定する。このとき、当該進入リンク番号と、当該脱出リンク番号を確認し、当該進入リンク番号と当該脱出リンク番号の組み合わせに紐づくノードコストの値をノードコストレコードから確認する。そして、ダイクストラ法による経路探索のコスト計算を、目的地に達するまで同様に続ける。
【0027】
具体的には、図3−(a)に示す交差点(ノード1)において、リンク1からノード1へ進入し、その次の探索枝を考慮する際、第1経路探索部22daは、まず、リンク1を進入リンク、リンク2を脱出リンクに設定する。その後、ノード1のノードレコードに格納されるノードコストテーブルを確認し、ノードコストレコードに格納される進入リンク番号(リンク1)と脱出リンク番号(リンク2)の組み合わせに紐づくノードコストの値(パラメータ12)を取得し、コスト計算を行う。
同様に、脱出リンクとしてリンク3、リンク4に対しても行い、ノード1に接続するリンクに対して、コスト計算を行うことで、経路を特定していく。
【0028】
また、図3−(b)に示す交差点(ノード5)において、リンク5からノード5に進入し、その次の探索枝を考慮する際、第1経路探索部22daは、まず、リンク5を進入リンク、リンク6を脱出リンクに設定する。その後、ノード5のノードレコードに格納されるノードコストテーブルを確認し、ノードコストレコードに格納される進入リンク番号(リンク5)と脱出リンク番号(リンク6)の組み合わせに紐づくノードコストの値(パラメータ56)を取得し、コスト計算を行う。
同様に、脱出リンクとしてリンク7、リンク8に対しても行い、ノード5に接続するリンクに対して、コスト計算を行うことで、経路を特定していく。
【0029】
第2経路探索部22dbでは、本発明に係る案内優先条件に応じた経路探索を行い、ノードコストおよびリンクコストは、地図データに記憶されている値を利用する。
この第2経路探索部22dbによる案内優先条件に応じた経路探索では、ノードからリンクへ探索枝を延ばす際に、当該ノードが示す交差点で右左折すると目印案内を行うか否かを確認する。そして、目印案内を行う場合には、当該ノードに接続する進入リンク以外のリンク全てを対象に経路探索を行い、目印案内を行わない場合には、当該ノードに接続する進入リンク以外のリンクの内、進入リンクに対して、直進方向に存在するリンクのみを対象に経路探索を行う。ここで直進方向とは、進入リンクに対して、接続するノードを中心に所定の角度(例えば、150°〜210°)内に存在するリンクであることや、進入リンクと道路名称や道路種別、道路属性が同じリンクであることなどにより、判断することができる。
【0030】
続いて、第2経路探索部22dbが、ノードからリンクへ探索枝を延ばす際の処理について説明する。
経路探索時に探索枝がノードに到達すると、当該ノードに進入してきたリンクを進入リンクに設定し、当該ノードのノードレコードの目印案内有無フラグを確認する。ここで、目印案内有無フラグに「0」が格納されている場合、当該交差点付近にランドマークが存在せず、目印案内を行わない交差点であると判断され、当該ノードでの右左折は行わないように、進入リンクに対し直進方向に存在するリンクだけを脱出リンクの候補とする。一方、目印案内有無フラグに「1」が格納されている場合、当該交差点付近にランドマークが存在し、目印案内を行う交差点であると判断され、進入リンク以外の当該ノードに接続する全てのリンクに対し、脱出リンクの候補となる。
その後、この候補となった脱出リンク毎に、進入リンクと脱出リンクを基に、ノードコストレコードからノードコストを確認し、ダイクストラ法による経路探索のコスト計算を、目的地に達するまで同様に続ける。
【0031】
具体的には、図3−(a)に示す交差点(ノード1)において、リンク1からノード1へ進入し、その次の探索枝を考慮する際、第2経路探索部22daは、まず、リンク1を進入リンクに設定する。そして、ノード1のノードレコードの目印案内有無フラグを確認し、その目印案内有無フラグに「0」が格納されているため、ノード1で示す交差点付近には目印案内の対象となるランドマークが存在せず、目印案内を行わない交差点であると判断し、リンク1に対して直進方向に存在するリンクを脱出リンクの候補とする。
その結果、リンク3を脱出リンクに設定し、ノード1のノードレコードに格納されるノードコストテーブルを確認し、ノードコストレコードに格納される進入リンク番号(リンク1)と脱出リンク番号(リンク3)の組み合わせに紐づくノードコストの値(パラメータ13)を取得し、コスト計算を行い、経路を特定していく。
【0032】
また、図3−(b)に示す交差点(ノード5)において、リンク5からノード5に進入し、その次の探索枝を考慮する際、第2経路探索部22dbは、まずリンク5を進入リンクに設定する。そして、ノード5のノードレコードの目印案内有無フラグを確認し、その目印案内有無フラグに「1」が格納されているため、ノード5で示す交差点付近には目印案内の対象となるランドマークが存在し、目印案内を行う交差点であると判断し、リンク5以外のノード5に接続する全てのリンクを脱出リンクの候補とする。
そして、脱出リンク毎にコスト計算を行うので、まずリンク6を脱出リンクに設定し、ノード1のノードレコードに格納されるノードコストテーブルを確認し、ノードコストレコードに格納される進入リンク番号(リンク5)と脱出リンク番号(リンク6)の組み合わせに紐づくノードコストの値(パラメータ56)を取得し、コスト計算を行う。
同様に、脱出リンクとしてリンク7、リンク8に対しても行い、ノード5に接続するリンクに対して、コスト計算を行うことで、経路を特定していく。
【0033】
再び、図1に戻り、地図描画部23は、地図バッファ21に読み出された地図データを用いて、自車位置周辺の地図画像を生成してVRAM24に書込み、画像読出部25は制御部22からの指示に従ってVRAM24から所定の画像部分を切り取った地図画像を読み出し、表示制御部31に出力する。
誘導経路メモリ26は、制御部22の経路探索部22dにより探索、設定された誘導経路を構成する全ノードの位置データを出発地から目的地まで通行順に記録する。そして、その誘導経路を、誘導経路描画部27と誘導経路案内部30に出力する。
誘導経路描画部27は、誘導経路メモリ26に記憶される誘導経路情報を用いて、誘導経路を強調表示した誘導経路画像を生成して、表示制御部31に出力する。
操作画面発生部28は、目的地選択画面や各種設定画面等を生成して表示制御部31に出力し、各種マーク発生部29は、自車位置マークやカーソル等の各種マークを生成して表示制御部31に出力する。
【0034】
誘導経路案内部30は、現在の自車位置と誘導経路情報を参照して案内交差点から所定距離の地点に到達したか確認し、到達すれば、当該案内交差点における交差点案内を表示制御部31に出力するとともに、スピーカ17から音声案内メッセージを出力する。具体的には、実際の経路誘導時に、自車が案内交差点から所定距離(例えば、300m)の地点に到達すれば、誘導経路案内部30は、交差点案内図(交差点拡大図、進行方向矢印、残距離等)を表示制御部31に出力し、表示制御部31が表示部16に表示する。それと同時に、当該案内交差点までの距離、進行方向(左折/右折の別)を案内する通常交差点案内、もしくは通常交差点案内に交差点付近に存在するランドマークの情報を用いた音声案内メッセージ(目印案内)を生成し、スピーカ17を介して、案内する。例えば、音声案内メッセージの一例として、通常交差点案内は案内交差点までの距離、進行方向を案内するので、「この先、300m先左折です。」という案内となり、目印案内では、通常交差点案内に、交差点付近に存在するランドマーク情報も付加するため、「この先、300m先左折です。ガソリンスタンドが目印です。」となる。
【0035】
この音声による交差点案内の処理について説明する。
誘導経路案内部30は、現在の自車位置と誘導経路情報を参照して案内交差点から所定距離の地点に到達した時に、当該案内交差点に対する進入リンクと脱出リンクを特定する。そして、特定した進入リンクと脱出リンクから目印ランドマークレコードに、進入リンクと脱出リンクの組み合わせに対し、ランドマーク番号が格納されているかを確認する。この時、ランドマーク番号が格納されていると、当該ランドマーク番号を参照し、ランドマークデータレコードから当該ランドマークに対する情報を取得することで、ランドマークの情報を付加した目印案内を行う。一方、ランドマーク番号が格納されていない場合、当該交差点は、ランドマークを用いた目印案内を行わないため、通常交差点案内を行う。
【0036】
表示制御部31は、画像読出部25がVRAM24から読み出し、切り取った地図画像に、各種マーク発生部29が生成した各種マークや、誘導経路描画部27が生成した誘導経路画像、誘導経路案内部30が生成した交差点拡大図を適宜合成し、表示部16に表示する。また、操作画面発生部28が生成した各種メニュー画面を表示部16に表示する。例えば、自車位置マークと自車位置周辺の地図画像を合成した自車周辺地図画面や、自車周辺地図画面に誘導経路画像を重ね合わせた経路案内画面、さらに、経路案内画面と交差点拡大図画像を同時に表示する交差点案内画面等を生成する。
また、操作画面発生部28が生成した目的地選択画面や、各種メニュー画面、経路探索部22dから出力される経路探索結果画面等、ユーザ操作に応じて、表示部16に表示する。
【0037】
次に、本発明に係るナビゲーション装置10の誘導経路探索処理について、図4を用いて説明する。
ユーザが操作部12から目的地選択画面表示操作を行うと、制御部22は、操作画面発生部28に対し、目的地選択画面の表示指示を出力する。その後、操作画面発生部28は、表示制御部31を介して、表示部16に目的地選択画面を表示する。そして、ユーザが、この画面に基づいて所定の操作を行って目的地を選択すると、目的地設定部22aは、ユーザが選択した施設を目的地として設定し、この目的地の位置情報を経路探索部22dに出力する(S11)。
また、ユーザが目的地を設定すると、車両位置検出部22cは、GPS受信機14と自律航法センサ15から出力される情報を基に、自車の車両位置を特定して、経路探索部22dに出力する(S12)。
【0038】
経路探索部22dは、目的地設定部22cから出力された目的地の位置情報と車両位置検出部22cから出力された自車位置を使用して、経路探索部22dは、自車位置から目的地までの経路探索を開始する。
このとき、経路探索部22dの第1経路探索部22daと第2経路探索部22dbのそれぞれが、自車位置から目的地までの経路を探索する(S13)。
【0039】
具体的には、図5に示す経路探索を開始する前の状況において、ユーザ操作により目的地が選択され、目的地設定部22cが目的地として地点GLを設定すると、車両位置検出部22aは自車位置STを特定する。そして、これらの情報が、経路探索部22dに出力され、自車位置STから目的地GLまでの経路を探索する。
この時、経路探索部22dの第1経路探索部22daは、コスト計算の結果、自車位置STから交差点ND1を左折し、目的地GLに到達する経路を探索する。
【0040】
一方、経路探索部22dの第2経路探索部22dbは、第1経路探索部22daの探索結果で左折した交差点ND1では左折せず直進し、交差点ND2、ND3で左折する経路を探索する。なぜなら、交差点ND1はランドマークを用いた目印案内を行う交差点でなく、交差点ND2、ND3はランドマークを用いた目印案内を行う交差点であるため、交差点ND1での右左折は探索対象外となる。その結果、コスト計算により、交差点ND1で左折するより、交差点ND2、ND3を経由する経路が探索されるからである。そして、コスト計算の結果、自車位置STから交差点ND2を左折し、その後、交差点ND3を左折し、目的地GLに到達する経路を探索する。
経路探索部22dの第1経路探索部22daと第2経路探索部22dbが経路探索を終了すると、その探索結果を、経路探索部22dから表示制御部31に出力し、表示制御部31は図6に示す経路探索結果を表示する(S14)。
【0041】
その後、ユーザが経路探索結果画面から所望する経路を操作部12より選択する。このとき、推奨条件選択キーRE1が押下され、推奨条件(推奨経路)が選択されると(S15の推奨条件)、経路探索部22dは、第1経路探索部22daが探索した経路を誘導経路に設定し、誘導経路メモリ26に出力する(S16)。
一方、案内優先条件選択キーGU1が押下され、案内優先条件(案内優先経路)が選択されると(S15の案内優先条件)、経路探索部22dは、第2経路探索部22dbが探索した経路を誘導経路に設定し、誘導経路メモリ26に出力する(S17)。
【0042】
そして、誘導経路メモリ26は、経路探索部22dから入力された誘導経路の情報を記憶しておき、誘導経路描画部27が、誘導経路メモリ26に記憶されている誘導経路情報を用いて、誘導経路を強調表示した誘導経路画像を生成する。そして、表示制御部31は、自車周辺地図画面と合成した誘導案内画面(図7)を生成し、表示部16に表示する。
さらに、誘導経路案内部30が、誘導経路メモリ26に記憶されている誘導経路情報から交差点拡大図を生成し、表示制御部31を介して、交差点案内画面を表示部16に表示する処理や、誘導経路案内部30が、誘導経路メモリ26に記憶されている誘導経路情報からランドマークを用いた目印案内をスピーカ17に出力し、音声案内を行う処理等、自車両の走行に合わせ、経路案内を開始する(S18)。
【0043】
上記の構成と処理により、第1経路探索部22daが探索した推奨条件による経路探索結果と第2経路探索部22dbが探索した案内優先条件による経路探索結果とをユーザが比較可能にした画面(図6)を表示させるようにしたため、ユーザは、上記2つの経路探索条件による経路探索結果を確認し、誘導経路として設定したい経路探索条件を選択することができる。
【0044】
なお、本実施例では、目的地選択後、推奨条件と案内優先条件との両条件による経路探索をそれぞれ行い、その結果を表示してから誘導経路とする経路条件をユーザに選択させる例を説明したが、これに限らず、製品仕様にあわせ、例えば、目的地選択後、経路探索部22dが経路探索を行う前に、図8のような経路探索条件選択画面を表示させ、経路探索よりも先に経路探索条件を選択するようにしてもよい。この場合、目的地選択後、操作画面発生部28が経路探索条件選択画面(図8)を生成し、表示部16に表示させ、それ基に、ユーザが経路探索条件を選択する。その後、選択された経路探索条件に応じて、第1経路探索部22daもしくは第2経路探索部22dbが経路探索を行い、その結果を表示部16に表示させる。そして、表示した経路探索結果を基にユーザが、当該経路を誘導経路する設定操作を行うと、経路案内が開始される。
このようにすることで、選択された1つの経路探索条件による経路探索だけを行うようになるため、余計な経路探索を行う必要がなく、経路探索処理の負荷が低減される。
【0045】
また、本実施例の第2経路探索部22dbは、交差点付近に目印案内の対象となるランドマークが存在するかを確認し、存在しない場合は、進入リンクに対し直進方向に存在するリンクのみを脱出リンクの候補として探索するようにしたが、これに限らず、第2経路探索部22dbにノードコスト補正係数(図9)を記憶させておき、経路探索時に、交差点付近に目印案内の対象となるランドマークが存在するか否か確認し、その存在有無に応じてノードコスト補正係数を乗算した値をノードコストとして利用するようにすることも可能である。
このようにすることでも目印案内を行う交差点での右左折を優先的に経路として設定することが可能となる。
【符号の説明】
【0046】
10 ナビゲーション装置
11 地図データ記憶部
12 操作部
13 VICS受信機
14 GPS受信機
15 自律航法センサ
16 表示部
17 スピーカ
21 地図バッファ
22 制御部
22a 車両位置検出部
22b 地図読出制御部
22c 目的地設定部
22d 経路探索部
22da 第1経路探索部
22db 第2経路探索部
23 地図描画部
24 VRAM
25 画像読出部
26 誘導経路メモリ
27 誘導経路描画部
28 操作画面発生部
29 各種マーク発生部
30 誘導経路案内部
31 表示制御部
ST 自車位置マーク
ND1、ND2、ND3 交差点(ノード)
GL 目的地
RE1、RE2 推奨条件選択キー
GU1、GU2 案内優先条件選択キー
【特許請求の範囲】
【請求項1】
交差点を通過する際のコストを格納したノードデータと、前記交差点間の道路を通過する際のコストを格納したリンクデータと、を含む地図データを記憶する記憶部と、
前記ノードデータとリンクデータとに基づいて目的地までの経路の積算コストが最小となる経路を探索する第1経路探索部と、
を備えるナビゲーション装置において、
前記経路上の交差点の右折及び左折を音声案内する経路案内部と、
前記経路案内部が交差点に存在する施設名を含んで交差点の右折及び左折を音声案内する交差点を優先的に経路として探索する第2経路探索部と、
前記第1経路探索部による経路探索または前記第2経路探索部による経路探索のいずれかを選択する選択画面を表示する表示部と、
前記表示部に表示された選択画面から探索経路を選択操作する操作部と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
前記選択画面は、前記第1経路探索部で探索された経路および前記第2経路探索部で探索された経路をユーザが比較可能な画面である、
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
前記選択画面は、前記第1経路探索部により経路探索を行うのか、前記第2経路探索部により経路探索を行うのかを経路探索前に選択する画面である、
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項1】
交差点を通過する際のコストを格納したノードデータと、前記交差点間の道路を通過する際のコストを格納したリンクデータと、を含む地図データを記憶する記憶部と、
前記ノードデータとリンクデータとに基づいて目的地までの経路の積算コストが最小となる経路を探索する第1経路探索部と、
を備えるナビゲーション装置において、
前記経路上の交差点の右折及び左折を音声案内する経路案内部と、
前記経路案内部が交差点に存在する施設名を含んで交差点の右折及び左折を音声案内する交差点を優先的に経路として探索する第2経路探索部と、
前記第1経路探索部による経路探索または前記第2経路探索部による経路探索のいずれかを選択する選択画面を表示する表示部と、
前記表示部に表示された選択画面から探索経路を選択操作する操作部と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
前記選択画面は、前記第1経路探索部で探索された経路および前記第2経路探索部で探索された経路をユーザが比較可能な画面である、
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
前記選択画面は、前記第1経路探索部により経路探索を行うのか、前記第2経路探索部により経路探索を行うのかを経路探索前に選択する画面である、
ことを特徴とする請求項1記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−96713(P2013−96713A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−236652(P2011−236652)
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]