
ハイブリッド車両の制御装置
【課題】シーケンシャルモードによって設定される下限エンジン回転数によるエンジン回転数の制御を実現しつつ、システム電圧を制限することのできるハイブリッド車両の制御装置を提供する。
【解決手段】本発明にかかるハイブリッド車両の制御装置であるパワーマネジメントコントロールコンピュータ500は、電圧制限モードによりシステム電圧を制限する際に、シーケンシャルモードにより下限エンジン回転数を設定しているときには、動力分割機構130を通じて分配されるトルクを第1のモータジェネレータ120における回生制動によって相殺するために必要なシステム電圧を算出し、算出されたシステム電圧を下回らないようにシステム電圧を制限する。
【解決手段】本発明にかかるハイブリッド車両の制御装置であるパワーマネジメントコントロールコンピュータ500は、電圧制限モードによりシステム電圧を制限する際に、シーケンシャルモードにより下限エンジン回転数を設定しているときには、動力分割機構130を通じて分配されるトルクを第1のモータジェネレータ120における回生制動によって相殺するために必要なシステム電圧を算出し、算出されたシステム電圧を下回らないようにシステム電圧を制限する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明はハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
2つのモータジェネレータとエンジンとを備えるハイブリッドシステムを搭載したハイブリッド車両が知られている。ハイブリッド車両にあっては、エンジンが出力する動力の一部を利用して第1のモータジェネレータを駆動し、そこで発電された電力を利用して第2のモータジェネレータを駆動することによってエンジンの駆動力に第2のモータジェネレータの駆動力を加えて駆動輪を駆動することがある。
【0003】
こうしてエンジンが出力する動力の一部を第1のモータジェネレータに分配するととともに、第2のモータジェネレータからの動力により駆動をアシストすることにより、エンジン回転数を調整し、エンジンを効率のよい運転領域で運転させつつ、所望の駆動力を得ることができる。
【0004】
こうしたハイブリッドシステムを搭載したハイブリッド車両の制御装置として、特許文献1にはシステム電圧を最大電圧よりも低い電圧に制限することにより燃費の向上を図ることのできるハイブリッド車両の制御装置が記載されている。また、特許文献2には有段変速機を備える車両のような運転感覚を演出するために車速に比例して変化する下限エンジン回転数を設定し、この下限エンジン回転数を下回らないようにエンジン回転数を制御するシーケンシャルモードを備えたハイブリッド車両の制御装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010‐6296号公報
【特許文献2】特開2010‐13001号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、システム電圧を制限した場合には、モータジェネレータにおける定格トルクが低下し、モータジェネレータによる回生制動力も低減することになる。その結果、エンジンから分配される動力を十分に回生制動することができずにエンジン回転数や第1のモータジェネレータの回転数が過剰に高くなってしまうおそれがある。これを抑制するためには第1のモータジェネレータの回転数並びに定格トルクとエンジンの性能曲線を考慮して第1のモータジェネレータの回転数に上限を設け、第1のモータジェネレータの回転数を制限する必要がある。しかし、第1のモータジェネレータの回転数を制限するためには、第1のモータジェネレータを駆動しているエンジンの回転数に上限を設け、エンジン回転数を制限する必要がある。
【0007】
これに対して、上述したようにシーケンシャルモードにあっては、下限エンジン回転数を設けてエンジン回転数を制御するようにしている。そのため、シーケンシャルモードにより設定されている下限エンジン回転数が、第1のモータジェネレータの回転数を制限するために設けられる上限エンジン回転数よりも高い場合には、シーケンシャルモードによって設定された下限エンジン回転数を実現することができなくなってしまう。
【0008】
この発明は上記実情に鑑みてなされたものであり、その目的はシーケンシャルモードによって設定される下限エンジン回転数によるエンジン回転数の制御を実現しつつ、システム電圧を制限することのできるハイブリッド車両の制御装置を提供することにある。
【課題を解決するための手段】
【0009】
以下、上記目的を達成するための手段及びその作用効果について記載する。
請求項1に記載の発明は、エンジンと、第1のモータジェネレータと、前記エンジンの動力を前記第1のモータジェネレータに分配する動力分割機構と、駆動輪と前記動力分割機構との間に連結される第2のモータジェネレータと、前記第1のモータジェネレータ及び前記第2のモータジェネレータとの間で電力の授受を行うバッテリと、前記バッテリの電力を昇圧して前記第1のモータジェネレータ及び前記第2のモータジェネレータに電力を供給するコンバータとを備え、制御モードとして、前記コンバータによって昇圧されるシステム電圧を最大電圧よりも低い電圧に制限した状態で車両を制御する電圧制限モードと、選択された変速段に応じて車速に比例して変化する下限エンジン回転数を設定するシーケンシャルモードとを有するハイブリッド車両の制御装置であり、前記電圧制限モードによりシステム電圧を制限する際に、前記シーケンシャルモードにより下限エンジン回転数を設定しているときには、前記動力分割機構を通じて分配されるトルクを前記第1のモータジェネレータにおける回生制動によって相殺するために必要なシステム電圧を算出し、算出されたシステム電圧を下回らないようにシステム電圧を制限するハイブリッド車両の制御装置である。
【0010】
上記構成によれば、下限エンジン回転数に基づいて運転されるエンジンから分配されるトルクを第1のモータジェネレータにおける回生制動によって相殺するために必要なシステム電圧が算出され、この算出されたシステム電圧を確保できる範囲でシステム電圧が制限されるようになる。そのため、システム電圧を制限しつつ、エンジンから第1のモータジェネレータに分配されるトルクを電力に変換することによって消費し、第1のモータジェネレータの回転数を保持することができる。そのため、下限エンジン回転数を下回らないようにエンジンを運転させつつ、第1のモータジェネレータの回転数が過剰に高くなることを抑制することができる。
【0011】
したがって、上記請求項1に記載の発明によれば、シーケンシャルモードによって設定される下限エンジン回転数によるエンジン回転数の制御を実現しつつ、システム電圧を制限することができる。
【図面の簡単な説明】
【0012】
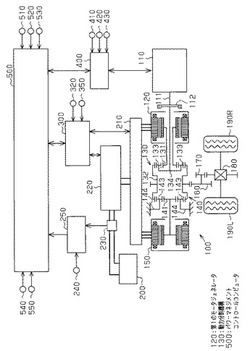
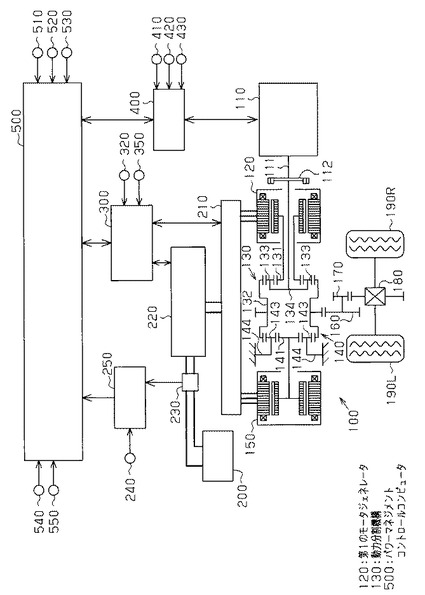
【図1】この発明にかかるハイブリッド車両の制御装置であるパワーマネジメントコントロールコンピュータと、その制御対象であるハイブリッドシステムとの関係を示す模式図。
【図2】車速及び選択されている変速段と、下限エンジン回転数との関係を示すマップ。
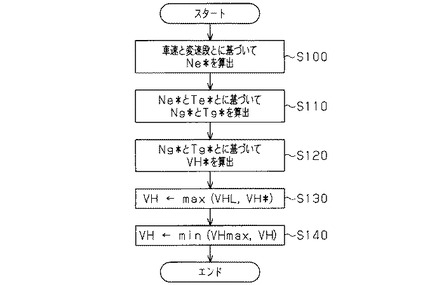
【図3】シーケンシャルモード時のシステム電圧設定処理の流れを示すフローチャート。
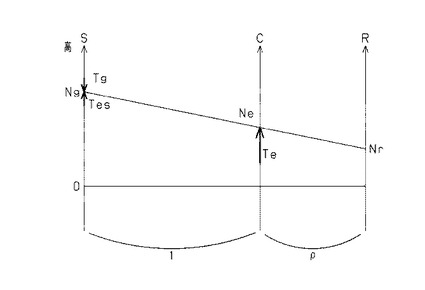
【図4】エンジン回転数、ジェネレータ回転数、リングギア回転数の関係を示す共線図。
【図5】必要ジェネレータ回転数及び必要ジェネレータトルクと、必要システム電圧との関係を示すマップ。
【発明を実施するための形態】
【0013】
以下、本発明にかかるハイブリッド車両の制御装置をハイブリッドシステムの出力制御を行うパワーマネジメントコントロールコンピュータとして具体化した一実施形態について、図1〜5を参照して説明する。
【0014】
図1に示すように本実施形態にかかるハイブリッドシステム100は、エンジン110と2つのモータジェネレータ120,150とを動力分割機構130並びにリダクションギア140を介して連結することによって構成されている。
【0015】
なお、第1のモータジェネレータ120及び第2のモータジェネレータ150は、いずれも内部に永久磁石が埋め込まれたロータと三相コイルが巻回されたステータとを備える周知の同期発電電動機である。
【0016】
動力分割機構130は、外歯歯車のサンギア131と、このサンギア131を取り囲む内場歯車を備えるリングギア132と、サンギア131及びリングギア132の双方に噛合する複数のプラネタリギア133とを備える遊星歯車機構である。それぞれのプラネタリギア133はプラネタリキャリア134によって連結され、自転自在且つ公転自在に支持されている。プラネタリキャリア134は図1の右下に示されるようにダンパ112を介してエンジン110のクランクシャフト111に連結されている。サンギア131は第1のモータジェネレータ120に連結されている。リングギア132にはカウンターギア160が噛合されており、リングギア132の動力はこのカウンターギア160とファイナルギア170を介してディファレンシャル180に伝達される。
【0017】
また、図1の左下に示されるようにリングギア132には、リダクションギア140を介して第2のモータジェネレータ150が接続されている。リダクションギア140は動力分割機構130と同様にサンギア141と、複数のプラネタリギア143を備える遊星歯車機構である。しかし、リダクションギア140にあってはプラネタリキャリア144が固定されている。そのため、リダクションギア140のプラネタリギア143は自転自在であるものの公転不能になっている。なお、第2のモータジェネレータ150はサンギア141に連結されている。
【0018】
このように構成されたハイブリッドシステム100にあっては、プラネタリキャリア134から入力されるエンジン110からの動力が動力分割機構130を通じてサンギア131側とリングギア132側に分配されることになる。なお、リングギア132の歯数に対するサンギア131の歯数の比であるプラネタリ比は「ρ」であり、動力はこのプラネタリ比に応じて分配される。
【0019】
リングギア132は、動力分割機構130を通じて入力されるエンジン110の動力と、リダクションギア140を通じて入力される第2のモータジェネレータ150の動力とを統合してディファレンシャル180に伝達する。これにより、ハイブリッドシステム100から出力された動力は、ディファレンシャル180を介して左右の駆動輪190L,190Rに分配される。
【0020】
第1のモータジェネレータ120及び第2のモータジェネレータ150はインバータ210及びコンバータ220を介してバッテリ200に接続されている。インバータ210は第1のモータジェネレータ120と第2のモータジェネレータ150のそれぞれに対して6個の絶縁ゲートバイポーラトランジスタにより3相ブリッジ回路を構成している。これにより、インバータ210では、半導体スイッチング素子として絶縁ゲートバイポーラトランジスタをON・OFFすることにより、直流電流を三相交流電流に変換したり、三相交流電流を直流電流に変換したりすることができる。
【0021】
コンバータ220はリアクトルと2つの絶縁バイポーラトランジスタとにより構成されており、一方の絶縁バイポーラトランジスタをON・OFFすることにより、バッテリ200から供給される電力を昇圧してインバータ210に供給する。また、他方の絶縁バイポーラトランジスタをON・OFFすることにより、インバータ210から供給される電力を降圧してバッテリ200に供給することもできる。
【0022】
これにより、第1のモータジェネレータ120によって発電された交流電流は、インバータ210に伝達されるとともに同インバータ210によって直流電流に変換され、コンバータ220を通じて降圧された後にバッテリ200に充電される。
【0023】
また、エンジン110の始動時には、バッテリ200から供給される直流電流がコンバータ220を通じて昇圧された後にインバータ210によって交流電流に変換されて第1のモータジェネレータ120に供給される。
【0024】
第2のモータジェネレータ150も、第1のモータジェネレータ120と同じくインバータ210及びコンバータ220を介してバッテリ200に接続されている。そして、発進時や低速時、加速時にはバッテリ200から供給される直流電流がコンバータ220で昇圧された後にインバータ210によって交流電流に交換されて第2のモータジェネレータ150に供給される。
【0025】
第1のモータジェネレータ120は、エンジン110の始動時にはエンジン110をクランキングするスタータモータとして機能する一方、エンジン110の運転中にはエンジン110の動力を利用して発電を行うジェネレータとして機能する。
【0026】
また、定常走行時や加速時には、第1のモータジェネレータ120によって発電された交流電流がインバータ210を介して第2のモータジェネレータ150に供給される。こうして供給された電流によって第2のモータジェネレータ150が駆動されると、その動力はリダクションギア140に伝達される。そして、リダクションギア140に伝達された動力がディファレンシャル180を介して駆動輪190L,190Rに伝達される。
【0027】
また、減速時には、駆動輪190L,190Rから伝達される動力により第2のモータジェネレータ150が駆動される。このとき、第2のモータジェネレータ150がジェネレータとして機能し、発電することで、駆動輪190L,190Rから第2のモータジェネレータ150に伝達された動力が電力に変換される。こうして変換された電力は、インバータ210によって交流電流から直流電流に変換され、コンバータ220を通じて降圧された後にバッテリ200に充電される。
【0028】
すなわち、減速時には、運動エネルギーを電気エネルギーに変換してバッテリ200に蓄えることにより、エネルギーを回収するようにしている。
こうしたハイブリッドシステム100の制御は、パワーマネジメントコントロールコンピュータ500から出力される制御信号に基づいて実行される。パワーマネジメントコントロールコンピュータ500は、ハイブリッドシステム100の各部を制御するための各種演算処理を実施する中央演算処理装置(CPU)、制御用のプログラムやデータが記憶された読み込み専用メモリ(ROM)、演算処理の結果などを一時的に記憶するランダムアクセスメモリ(RAM)などを備えて構成されている。
【0029】
また、図1に示すように、パワーマネジメントコントロールコンピュータ500には、バッテリ監視ユニット250、モータ制御ユニット300、エンジン制御ユニット400が接続されている。
【0030】
バッテリ監視ユニット250には、バッテリ200とコンバータ220との間の電力ラインに設けられた電流センサ230からの電流値信号、バッテリ温度センサ240からのバッテリ温度信号などが入力される。バッテリ監視ユニット250は、こうしたセンサから入力されたバッテリ200の状態に関するデータを必要に応じてパワーマネジメントコントロールコンピュータ500に送信する。なお、パワーマネジメントコントロールコンピュータ500は、バッテリ監視ユニット250から送信される電流センサ230の検出値の積算値に基づいてバッテリ200の充電状態を演算する。
【0031】
モータ制御ユニット300は、パワーマネジメントコントロールコンピュータ500からの出力要求に従い、インバータ210とコンバータ220を制御し、第1のモータジェネレータ120及び第2のモータジェネレータ150を制御する。また、モータ制御ユニット300には第1のモータジェネレータ120の回転数を検出する回転センサ320と第2のモータジェネレータ150の回転数を検出する回転センサ350が接続されている。モータ制御ユニット300は、これら回転センサ320,350によって検出された回転数の情報など、車両制御に必要な情報をパワーマネジメントコントロールコンピュータ500に送信する。
【0032】
エンジン制御ユニット400は、パワーマネジメントコントロールコンピュータ500からの出力要求に従い、エンジン110における燃料噴射制御や、点火時期制御、吸入空気量制御などを行う。エンジン制御ユニット400には、吸入空気量を検出するエアフロメータ410や、クランクシャフト111の回転数であるエンジン回転数Neを検出するクランクポジションセンサ420、スロットルバルブの開度を検出するスロットルポジションセンサ430などが接続されている。また、エンジン制御ユニット400は、必要に応じてこれらのセンサによって検出された情報をパワーマネジメントコントロールコンピュータ500に送信する。
【0033】
バッテリ監視ユニット250、モータ制御ユニット300、エンジン制御ユニット400の他にも、パワーマネジメントコントロールコンピュータ500には、アクセルの操作量を検出するアクセルポジションセンサ510、シフトレバーの操作位置を検出するシフトポジションセンサ520、車速を検出する車速センサ530などが接続されている。
【0034】
また、パワーマネジメントコントロールコンピュータ500には、運転者がドライブモードを選択するためのドライブモードセレクトスイッチ540と、後述するシーケンシャルモードにおける変速段を選択するためのシフトスイッチ550が接続されている。
【0035】
パワーマネジメントコントロールコンピュータ500は、アクセルの操作量と車速とに基づいてリングギア132に出力すべき要求トルクを算出し、この要求トルクに対応する要求動力がリングギア132に出力されるように、エンジン110、第1のモータジェネレータ120、第2のモータジェネレータ150を制御する。
【0036】
例えば、エンジン110が出力する動力の一部を利用して第1のモータジェネレータ120を駆動し、そこで発電された電力を利用して第2のモータジェネレータ150を駆動することによってエンジン110の動力に第2のモータジェネレータ150の動力を加えて駆動輪190L,190Rを駆動する。こうしてエンジン110が出力する動力の一部を第1のモータジェネレータ120に分配するととともに、第2のモータジェネレータ150の動力によって駆動をアシストすることにより、エンジン回転数Neを調整し、エンジン110を効率のよい運転領域で運転させつつ、要求動力が得られるようにする。
【0037】
また、要求動力が大きい加速時などには、バッテリ200から第2のモータジェネレータ150に電力を供給し、第2のモータジェネレータ150によるアシスト量を増大させてより大きな動力を出力する。
【0038】
更に、バッテリ200の充電残量が少ないときには、エンジン110の運転量を増大させ、第1のモータジェネレータ120における発電量を増大させることにより、バッテリ200に電力を供給する。一方で、バッテリ200の充電残量が十分に確保されている場合には、エンジン110の運転を停止して要求動力に見合う動力を第2のモータジェネレータ150のみからリングギア132に出力するモータ運転も可能である。
【0039】
また、本実施形態のパワーマネジメントコントロールコンピュータ500には、上述したようにドライブモードセレクトスイッチ540が接続されている。そして、特許文献1に記載されている発明と同様に、運転者がこのドライブモードセレクトスイッチ540を操作することにより、システム電圧VHを制限し、燃費の向上を図ることができるようになっている。なお、本実施形態におけるシステム電圧VHとは、インバータ210と各モータジェネレータ120,150との間でやりとりされる電力の電圧のことである。
【0040】
本実施形態のハイブリッドシステム100にあっては、通常運転モードの他に、パワーモードとエコモードを選択することができるようになっている。そして、通常運転モードのときにはシステム電圧VHを、システム保護の要件に基づいて設定されている最大電圧VHmaxである650ボルトまで昇圧せずに、500ボルトに昇圧するようにしている。そして、パワーモードが選択されたときにシステム電圧VHを最大電圧VHmaxである650ボルトまで昇圧し、出力を向上させるようにしている。一方で、エコモードが選択されたときには、システム電圧VHを500ボルト未満に制限し、より燃料消費量の少ない運転を実現するようにしている。
【0041】
すなわち、本実施形態のハイブリッドシステム100にあっては、通常運転モードとエコモードが、システム電圧VHを最大電圧VHmaxよりも低い電圧に制限する電圧制限モードに相当する。
【0042】
なお、パワーマネジメントコントロールコンピュータ500はドライブモードセレクトスイッチ540の操作によって選択されているモードを優先するが、アクセルの操作量が非常に大きいときには大きな出力が要求されていると判断し、ドライブモードセレクトスイッチ540の操作に依らずに自動的にパワーモードに切り替えることもある。
【0043】
また、本実施形態のパワーマネジメントコントロールコンピュータ500は、特許文献2に記載されている発明と同様に、運転者がシフトスイッチ550やシフトレバーを操作することにより、任意に変速段を切り替えることのできるシーケンシャルモードを備えている。
【0044】
本実施形態のハイブリッドシステム100にあっては、6つの変速段を備える有段変速機を搭載した車両のような運転感覚を演出するために、1速〜6速までの6つの変速段に対応させて図2に示されるように車速に比例して変化する下限エンジン回転数を設定する。なお、図2に示される実線L1〜L6はそれぞれ1速〜6速における下限エンジン回転速度を示している。すなわち、実線L1は1速が選択されているときの車速と下限エンジン回転数との関係を示しており、実線L2は2速が選択されているときの車速と下限エンジン回転数との関係を示している。同様に、実線L3は3速が選択されているときの、実線L4は4速が選択されているときの、実線L5は5速が選択されているときの、実線L6は6速が選択されているときの、車速と下限エンジン回転数との関係をそれぞれ示している。
【0045】
例えば、6つの変速段のうち、3速が選択されている場合には、図2に示される実線L3に沿って車速に応じた下限エンジン回転数を設定する。すなわち、図2に矢印で示されるように車速が「V1」の場合には、下限エンジン回転数が「Ne1」に設定される。
【0046】
そして、パワーマネジメントコントロールコンピュータ500は、この設定された下限エンジン回転数を下回らないようにエンジン回転数Neを制御することにより、車速の変化に比例してエンジン回転数Neが変化する有段変速機を搭載した車両のような運転感覚を演出する。
【0047】
ところで、システム電圧VHを最大電圧VHmaxよりも小さい電圧にすることにより、システム電圧VHを制限した場合には、各モータジェネレータ120,150における定格トルクが低下し、各モータジェネレータ120,150における回生制動力も低減することになる。そのため、システム電圧VHを制限した場合には、エンジン110から分配される動力を十分に回生制動することができずに第1のモータジェネレータ120の回転数やエンジン110の回転数が過剰に高くなってしまうおそれがある。これを抑制するためには第1のモータジェネレータ120の回転数並びに定格トルクとエンジン110の性能曲線を考慮して第1のモータジェネレータ120の回転数に上限を設け、第1のモータジェネレータ120の回転数を制限する必要がある。しかし、第1のモータジェネレータ120の回転数を制限するためには、第1のモータジェネレータ120を駆動しているエンジン110の回転数に上限を設け、エンジン回転数Neを制限する必要がある。
【0048】
シーケンシャルモードにあっては、上述したように下限エンジン回転数を設けてエンジン回転数Neを制御するようにしている。そのため、シーケンシャルモードにより設定されている下限エンジン回転数が、第1のモータジェネレータ120の回転数を制限するために設けられる上限エンジン回転数よりも高い場合には、シーケンシャルモードによって設定された下限エンジン回転数を実現することができなくなってしまう。
【0049】
そこで、本実施形態のパワーマネジメントコントロールコンピュータ500では、シーケンシャルモードによって設定された下限エンジン回転数を下回らないようにエンジン回転数Neを制御しつつ、システム電圧VHを制限することができるように、下限エンジン回転数を考慮してシステム電圧VHを制限するようにしている。
【0050】
以下、本実施形態にかかるシーケンシャルモード時のシステム電圧設定処理について図3〜5を参照して説明する。
図3に示されるシステム電圧設定処理は、シーケンシャルモードによる制御が実行されているときにパワーマネジメントコントロールコンピュータ500によって所定の制御周期で繰り返し実行される。
【0051】
この処理が開始されると、パワーマネジメントコントロールコンピュータ500は、図3に示されるようにまずステップS100において、車速と選択されている変速段とに基づいて必要エンジン回転数Ne*を算出する。具体的には、図2を参照して説明したように、選択されている変速段と車速とに基づいて下限エンジン回転数を算出し、この下限エンジン回転数を必要エンジン回転数Ne*とする。なお、下限エンジン回転数に所定のマージンを加算して必要エンジン回転数Ne*を算出するようにしてもよい。
【0052】
こうして必要エンジン回転数Ne*を算出すると、パワーマネジメントコントロールコンピュータ500は、ステップS120において必要エンジン回転数Ne*と必要エンジントルクTe*とに基づき、必要ジェネレータ回転数Ng*と必要ジェネレータトルクTg*を算出する。
【0053】
なお、必要エンジントルクTe*は、パワーマネジメントコントロールコンピュータ500における周知の出力制御を通じて算出されるエンジン110が出力すべき要求トルクの値である。
【0054】
ここでは、図4の共線図に示される関係を利用して、エンジン回転数Neを必要エンジン回転数Ne*に保持しつつ、必要エンジントルクTe*を実現するために必要な第1のモータジェネレータの回転数Ng並びにトルクTgを算出し、これらの値を必要ジェネレータ回転数Ng*、必要ジェネレータトルクTg*とする。
【0055】
上述したように本実施形態にかかる動力分割機構130におけるプラネタリ比は「ρ」であるため、共線図におけるサンギア131に対応する軸「S」からプラネタリキャリア134に対応する軸「C」までの距離と軸「C」からリングギア132に対応する軸「R」までの距離との関係は、図4に示されるように「1:ρ」になる。
【0056】
エンジン110のクランクシャフト111はプラネタリキャリア134に連結されており、第1のモータジェネレータ120はサンギア131に連結されているため、第1のモータジェネレータ120の回転数であるジェネレータ回転数Ngとエンジン回転数Neは図4に示されるように共線図上に示すことができる。
【0057】
図4の共線図に示される関係からリングギア132の回転数Nrとエンジン回転数Neとジェネレータ回転数Ngとの関係は、下記の数式(1)で表すことができる。
【0058】
【数1】

なお、リングギアの回転数Nrは、車速とリングギア132から駆動輪190L、190Rまで間の減速比とに基づいて算出することができる。
【0059】
したがって、車速に基づいて算出されるリングギア132の回転数Nrと必要エンジン回転数Ne*を上記の数式(1)に代入すれば、必要ジェネレータ回転数Ng*を算出することができる。ステップS110では、このように数式(1)に示される関係を利用することにより、必要ジェネレータ回転数Ng*を算出する。
【0060】
また、エンジン110が出力するトルクTeは、リングギア132とサンギア131に分配される。動力分割機構130におけるプラネタリ比は「ρ」であるため、エンジン110が出力するトルクTeとサンギア131に分配されるトルクTesとの関係は下記の数式(2)で表すことができる。
【0061】
【数2】
したがって、図4に下向きの矢印で示されるようにこの分配されるトルクTesを相殺するために必要なジェネレータトルクTgは下記の数式(3)によって算出することができる。
【0062】
【数3】
ステップS110では、この数式(3)に示される関係を利用して、必要エンジントルクTe*が出力されたときに分配されるトルクTesを相殺するために必要なジェネレータトルクTgを必要ジェネレータトルクTg*として算出する。
【0063】
より具体的には、数式(3)にエンジントルクTeとして必要エンジントルクTe*を代入し、算出されたジェネレータトルクTgを必要ジェネレータトルクTg*とする。
こうして必要ジェネレータ回転数Ng*と必要ジェネレータトルクTg*を算出すると、パワーマネジメントコントロールコンピュータ500はステップS120において、必要ジェネレータ回転数Ng*と必要ジェネレータトルクTg*に基づいて必要システム電圧VH*を算出する。
【0064】
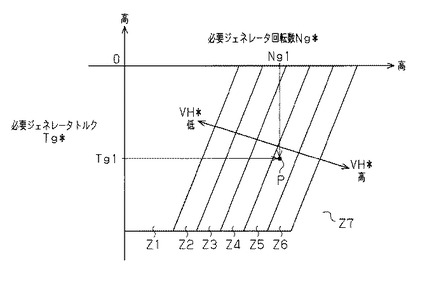
具体的には、図5に示されるような演算マップを利用して必要システム電圧VH*を算出する。この演算マップには、図5に示されるように必要ジェネレータ回転数Ng*、必要ジェネレータトルクTg*の大きさに応じて7つの領域Z1、Z2、Z3、Z4、Z5、Z6、Z7が区画されており、各領域にはそれぞれ異なる大きさの必要システム電圧VH*の値が設定されている。なお、この演算マップにあっては、必要ジェネレータ回転数Ng*が高いほど、また必要ジェネレータトルクTg*が高いほど、高い必要システム電圧VH*が算出されるように各領域に対する必要システム電圧VH*の値が設定されている。また、各領域に対して設定されている必要システム電圧VH*の値は予め行う実験などの結果に基づいて、その領域内に規定される状態(ジェネレータ回転数Ng、ジェネレータトルクTg)で第1のモータジェネレータ120を運転させるために必要なシステム電圧VHの大きさに基づいて設定されている。
【0065】
ステップS120では、こうした演算マップを利用して、図5に矢印で示されるように必要ジェネレータ回転数Ng*と必要ジェネレータトルクTg*を実現する点Pが属する領域に対して設定されている必要システム電圧VH*の値を読み出すことにより、必要システム電圧VH*を算出する。具体的には、図5に示されるように必要ジェネレータ回転数Ng*が「Ng1」であり、必要ジェネレータトルクTg*が「Tg1」である場合には、点Pが属する領域は「Z5」であるため、この領域Z5に対して設定された必要システム電圧VH*を読み出し、これを必要システム電圧VH*とする。
【0066】
こうして必要システム電圧VH*を算出すると、ステップS130へと進み、パワーマネジメントコントロールコンピュータ500は、算出された必要システム電圧VH*と選択されているドライブモードにおけるシステム電圧VHの設定値である制限システム電圧VHLとを比較し、そのうちの大きい方の値をシステム電圧VHとする。
【0067】
そして、ステップS140へと進み、ステップS130を通じて設定されたシステム電圧VHと最大電圧VHmaxとを比較し、そのうちの大きい方の値を最終的にシステム電圧VHとして設定する。
【0068】
本実施形態のパワーマネジメントコントロールコンピュータ500は、シーケンシャルモードによる制御が実行されているときに、上記のようなシステム電圧設定処理を繰り返し実行することにより、システム電圧VHを設定する。
【0069】
(作用)
このようなシステム電圧設定処理をシーケンシャルモード時に繰り返し実行することにより、下限エンジン回転数に基づいて運転されるエンジン110から分配されるトルクTesを第1のモータジェネレータ120における回生制動によって相殺するために必要なシステム電圧VHが必要システム電圧VH*として算出されるようになる。そして、この算出された必要システム電圧VH*を確保できる範囲でシステム電圧VHが制限されるようになる。
【0070】
以上説明した実施形態によれば、以下の効果が得られるようになる。
(1)下限エンジン回転数に基づいて運転されるエンジン110から分配されるトルクTesを第1のモータジェネレータ120における回生制動によって相殺することができる範囲でシステム電圧VHが制限されるようになる。そのため、システム電圧VHを制限しつつ、エンジン110から第1のモータジェネレータ120に分配されるトルクTesを電力に変換することによって消費し、第1のモータジェネレータ120の回転数Ngを保持することができる。そのため、下限エンジン回転数を下回らないようにエンジン110を運転させつつ、第1のモータジェネレータ120の回転数が過剰に高くなることを抑制することができる。
【0071】
したがって、シーケンシャルモードによって設定される下限エンジン回転数によるエンジン回転数Neの制御を実現しつつ、システム電圧VHを制限することができる。
なお、上記の実施形態にあってはドライブモードセレクトスイッチ540を備え、ドライブモードセレクトスイッチ540の操作によって通常運転モードとパワーモード、エコモードを切り替える例を示したが、本発明はこうした切り替え用のスイッチを備えるものに限って適用されるものではない。すなわち、ドライブモードセレクトスイッチ540のような切り替え用のスイッチを備えていなくても、システム電圧VHを制限する電圧制限モードによる運転を実現することができるものであれば、本発明を適用することができる。
【0072】
例えば切り替え用のスイッチを備えず、アクセルの操作量が非常に大きいときには大きな出力が要求されていると判断してパワーモードを選択してシステム電圧VHを最大電圧まで昇圧させて制御を行う一方、アクセルの操作量が比較的小さいときにはシステム電圧VHを制限した通常運転モードによる制御を行うものに本発明を適用することもできる。
【符号の説明】
【0073】
100…ハイブリッドシステム、110…エンジン、111…クランクシャフト、112…ダンパ、120…第1のモータジェネレータ、130…動力分割機構、131…サンギア、132…リングギア、133…プラネタリギア、134…プラネタリキャリア、140…リダクションギア、141…サンギア、143…プラネタリギア、144…プラネタリキャリア、150…第2のモータジェネレータ、160…カウンターギア、170…ファイナルギア、180…ディファレンシャル、190L,190R…駆動輪、200…バッテリ、210…インバータ、220…コンバータ、230…バッテリ電流センサ、240…バッテリ温度センサ、250…バッテリ監視ユニット、300…モータ制御ユニット、320,350…回転センサ、400…エンジン制御ユニット、410…エアフロメータ、420…クランクポジションセンサ、430…スロットルポジションセンサ、500…パワーマネジメントコントロールコンピュータ、510…アクセルポジションセンサ、520…シフトポジションセンサ、530…車速センサ、540…ドライブモードセレクトスイッチ、550…シフトスイッチ。
【技術分野】
【0001】
この発明はハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
2つのモータジェネレータとエンジンとを備えるハイブリッドシステムを搭載したハイブリッド車両が知られている。ハイブリッド車両にあっては、エンジンが出力する動力の一部を利用して第1のモータジェネレータを駆動し、そこで発電された電力を利用して第2のモータジェネレータを駆動することによってエンジンの駆動力に第2のモータジェネレータの駆動力を加えて駆動輪を駆動することがある。
【0003】
こうしてエンジンが出力する動力の一部を第1のモータジェネレータに分配するととともに、第2のモータジェネレータからの動力により駆動をアシストすることにより、エンジン回転数を調整し、エンジンを効率のよい運転領域で運転させつつ、所望の駆動力を得ることができる。
【0004】
こうしたハイブリッドシステムを搭載したハイブリッド車両の制御装置として、特許文献1にはシステム電圧を最大電圧よりも低い電圧に制限することにより燃費の向上を図ることのできるハイブリッド車両の制御装置が記載されている。また、特許文献2には有段変速機を備える車両のような運転感覚を演出するために車速に比例して変化する下限エンジン回転数を設定し、この下限エンジン回転数を下回らないようにエンジン回転数を制御するシーケンシャルモードを備えたハイブリッド車両の制御装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010‐6296号公報
【特許文献2】特開2010‐13001号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、システム電圧を制限した場合には、モータジェネレータにおける定格トルクが低下し、モータジェネレータによる回生制動力も低減することになる。その結果、エンジンから分配される動力を十分に回生制動することができずにエンジン回転数や第1のモータジェネレータの回転数が過剰に高くなってしまうおそれがある。これを抑制するためには第1のモータジェネレータの回転数並びに定格トルクとエンジンの性能曲線を考慮して第1のモータジェネレータの回転数に上限を設け、第1のモータジェネレータの回転数を制限する必要がある。しかし、第1のモータジェネレータの回転数を制限するためには、第1のモータジェネレータを駆動しているエンジンの回転数に上限を設け、エンジン回転数を制限する必要がある。
【0007】
これに対して、上述したようにシーケンシャルモードにあっては、下限エンジン回転数を設けてエンジン回転数を制御するようにしている。そのため、シーケンシャルモードにより設定されている下限エンジン回転数が、第1のモータジェネレータの回転数を制限するために設けられる上限エンジン回転数よりも高い場合には、シーケンシャルモードによって設定された下限エンジン回転数を実現することができなくなってしまう。
【0008】
この発明は上記実情に鑑みてなされたものであり、その目的はシーケンシャルモードによって設定される下限エンジン回転数によるエンジン回転数の制御を実現しつつ、システム電圧を制限することのできるハイブリッド車両の制御装置を提供することにある。
【課題を解決するための手段】
【0009】
以下、上記目的を達成するための手段及びその作用効果について記載する。
請求項1に記載の発明は、エンジンと、第1のモータジェネレータと、前記エンジンの動力を前記第1のモータジェネレータに分配する動力分割機構と、駆動輪と前記動力分割機構との間に連結される第2のモータジェネレータと、前記第1のモータジェネレータ及び前記第2のモータジェネレータとの間で電力の授受を行うバッテリと、前記バッテリの電力を昇圧して前記第1のモータジェネレータ及び前記第2のモータジェネレータに電力を供給するコンバータとを備え、制御モードとして、前記コンバータによって昇圧されるシステム電圧を最大電圧よりも低い電圧に制限した状態で車両を制御する電圧制限モードと、選択された変速段に応じて車速に比例して変化する下限エンジン回転数を設定するシーケンシャルモードとを有するハイブリッド車両の制御装置であり、前記電圧制限モードによりシステム電圧を制限する際に、前記シーケンシャルモードにより下限エンジン回転数を設定しているときには、前記動力分割機構を通じて分配されるトルクを前記第1のモータジェネレータにおける回生制動によって相殺するために必要なシステム電圧を算出し、算出されたシステム電圧を下回らないようにシステム電圧を制限するハイブリッド車両の制御装置である。
【0010】
上記構成によれば、下限エンジン回転数に基づいて運転されるエンジンから分配されるトルクを第1のモータジェネレータにおける回生制動によって相殺するために必要なシステム電圧が算出され、この算出されたシステム電圧を確保できる範囲でシステム電圧が制限されるようになる。そのため、システム電圧を制限しつつ、エンジンから第1のモータジェネレータに分配されるトルクを電力に変換することによって消費し、第1のモータジェネレータの回転数を保持することができる。そのため、下限エンジン回転数を下回らないようにエンジンを運転させつつ、第1のモータジェネレータの回転数が過剰に高くなることを抑制することができる。
【0011】
したがって、上記請求項1に記載の発明によれば、シーケンシャルモードによって設定される下限エンジン回転数によるエンジン回転数の制御を実現しつつ、システム電圧を制限することができる。
【図面の簡単な説明】
【0012】
【図1】この発明にかかるハイブリッド車両の制御装置であるパワーマネジメントコントロールコンピュータと、その制御対象であるハイブリッドシステムとの関係を示す模式図。
【図2】車速及び選択されている変速段と、下限エンジン回転数との関係を示すマップ。
【図3】シーケンシャルモード時のシステム電圧設定処理の流れを示すフローチャート。
【図4】エンジン回転数、ジェネレータ回転数、リングギア回転数の関係を示す共線図。
【図5】必要ジェネレータ回転数及び必要ジェネレータトルクと、必要システム電圧との関係を示すマップ。
【発明を実施するための形態】
【0013】
以下、本発明にかかるハイブリッド車両の制御装置をハイブリッドシステムの出力制御を行うパワーマネジメントコントロールコンピュータとして具体化した一実施形態について、図1〜5を参照して説明する。
【0014】
図1に示すように本実施形態にかかるハイブリッドシステム100は、エンジン110と2つのモータジェネレータ120,150とを動力分割機構130並びにリダクションギア140を介して連結することによって構成されている。
【0015】
なお、第1のモータジェネレータ120及び第2のモータジェネレータ150は、いずれも内部に永久磁石が埋め込まれたロータと三相コイルが巻回されたステータとを備える周知の同期発電電動機である。
【0016】
動力分割機構130は、外歯歯車のサンギア131と、このサンギア131を取り囲む内場歯車を備えるリングギア132と、サンギア131及びリングギア132の双方に噛合する複数のプラネタリギア133とを備える遊星歯車機構である。それぞれのプラネタリギア133はプラネタリキャリア134によって連結され、自転自在且つ公転自在に支持されている。プラネタリキャリア134は図1の右下に示されるようにダンパ112を介してエンジン110のクランクシャフト111に連結されている。サンギア131は第1のモータジェネレータ120に連結されている。リングギア132にはカウンターギア160が噛合されており、リングギア132の動力はこのカウンターギア160とファイナルギア170を介してディファレンシャル180に伝達される。
【0017】
また、図1の左下に示されるようにリングギア132には、リダクションギア140を介して第2のモータジェネレータ150が接続されている。リダクションギア140は動力分割機構130と同様にサンギア141と、複数のプラネタリギア143を備える遊星歯車機構である。しかし、リダクションギア140にあってはプラネタリキャリア144が固定されている。そのため、リダクションギア140のプラネタリギア143は自転自在であるものの公転不能になっている。なお、第2のモータジェネレータ150はサンギア141に連結されている。
【0018】
このように構成されたハイブリッドシステム100にあっては、プラネタリキャリア134から入力されるエンジン110からの動力が動力分割機構130を通じてサンギア131側とリングギア132側に分配されることになる。なお、リングギア132の歯数に対するサンギア131の歯数の比であるプラネタリ比は「ρ」であり、動力はこのプラネタリ比に応じて分配される。
【0019】
リングギア132は、動力分割機構130を通じて入力されるエンジン110の動力と、リダクションギア140を通じて入力される第2のモータジェネレータ150の動力とを統合してディファレンシャル180に伝達する。これにより、ハイブリッドシステム100から出力された動力は、ディファレンシャル180を介して左右の駆動輪190L,190Rに分配される。
【0020】
第1のモータジェネレータ120及び第2のモータジェネレータ150はインバータ210及びコンバータ220を介してバッテリ200に接続されている。インバータ210は第1のモータジェネレータ120と第2のモータジェネレータ150のそれぞれに対して6個の絶縁ゲートバイポーラトランジスタにより3相ブリッジ回路を構成している。これにより、インバータ210では、半導体スイッチング素子として絶縁ゲートバイポーラトランジスタをON・OFFすることにより、直流電流を三相交流電流に変換したり、三相交流電流を直流電流に変換したりすることができる。
【0021】
コンバータ220はリアクトルと2つの絶縁バイポーラトランジスタとにより構成されており、一方の絶縁バイポーラトランジスタをON・OFFすることにより、バッテリ200から供給される電力を昇圧してインバータ210に供給する。また、他方の絶縁バイポーラトランジスタをON・OFFすることにより、インバータ210から供給される電力を降圧してバッテリ200に供給することもできる。
【0022】
これにより、第1のモータジェネレータ120によって発電された交流電流は、インバータ210に伝達されるとともに同インバータ210によって直流電流に変換され、コンバータ220を通じて降圧された後にバッテリ200に充電される。
【0023】
また、エンジン110の始動時には、バッテリ200から供給される直流電流がコンバータ220を通じて昇圧された後にインバータ210によって交流電流に変換されて第1のモータジェネレータ120に供給される。
【0024】
第2のモータジェネレータ150も、第1のモータジェネレータ120と同じくインバータ210及びコンバータ220を介してバッテリ200に接続されている。そして、発進時や低速時、加速時にはバッテリ200から供給される直流電流がコンバータ220で昇圧された後にインバータ210によって交流電流に交換されて第2のモータジェネレータ150に供給される。
【0025】
第1のモータジェネレータ120は、エンジン110の始動時にはエンジン110をクランキングするスタータモータとして機能する一方、エンジン110の運転中にはエンジン110の動力を利用して発電を行うジェネレータとして機能する。
【0026】
また、定常走行時や加速時には、第1のモータジェネレータ120によって発電された交流電流がインバータ210を介して第2のモータジェネレータ150に供給される。こうして供給された電流によって第2のモータジェネレータ150が駆動されると、その動力はリダクションギア140に伝達される。そして、リダクションギア140に伝達された動力がディファレンシャル180を介して駆動輪190L,190Rに伝達される。
【0027】
また、減速時には、駆動輪190L,190Rから伝達される動力により第2のモータジェネレータ150が駆動される。このとき、第2のモータジェネレータ150がジェネレータとして機能し、発電することで、駆動輪190L,190Rから第2のモータジェネレータ150に伝達された動力が電力に変換される。こうして変換された電力は、インバータ210によって交流電流から直流電流に変換され、コンバータ220を通じて降圧された後にバッテリ200に充電される。
【0028】
すなわち、減速時には、運動エネルギーを電気エネルギーに変換してバッテリ200に蓄えることにより、エネルギーを回収するようにしている。
こうしたハイブリッドシステム100の制御は、パワーマネジメントコントロールコンピュータ500から出力される制御信号に基づいて実行される。パワーマネジメントコントロールコンピュータ500は、ハイブリッドシステム100の各部を制御するための各種演算処理を実施する中央演算処理装置(CPU)、制御用のプログラムやデータが記憶された読み込み専用メモリ(ROM)、演算処理の結果などを一時的に記憶するランダムアクセスメモリ(RAM)などを備えて構成されている。
【0029】
また、図1に示すように、パワーマネジメントコントロールコンピュータ500には、バッテリ監視ユニット250、モータ制御ユニット300、エンジン制御ユニット400が接続されている。
【0030】
バッテリ監視ユニット250には、バッテリ200とコンバータ220との間の電力ラインに設けられた電流センサ230からの電流値信号、バッテリ温度センサ240からのバッテリ温度信号などが入力される。バッテリ監視ユニット250は、こうしたセンサから入力されたバッテリ200の状態に関するデータを必要に応じてパワーマネジメントコントロールコンピュータ500に送信する。なお、パワーマネジメントコントロールコンピュータ500は、バッテリ監視ユニット250から送信される電流センサ230の検出値の積算値に基づいてバッテリ200の充電状態を演算する。
【0031】
モータ制御ユニット300は、パワーマネジメントコントロールコンピュータ500からの出力要求に従い、インバータ210とコンバータ220を制御し、第1のモータジェネレータ120及び第2のモータジェネレータ150を制御する。また、モータ制御ユニット300には第1のモータジェネレータ120の回転数を検出する回転センサ320と第2のモータジェネレータ150の回転数を検出する回転センサ350が接続されている。モータ制御ユニット300は、これら回転センサ320,350によって検出された回転数の情報など、車両制御に必要な情報をパワーマネジメントコントロールコンピュータ500に送信する。
【0032】
エンジン制御ユニット400は、パワーマネジメントコントロールコンピュータ500からの出力要求に従い、エンジン110における燃料噴射制御や、点火時期制御、吸入空気量制御などを行う。エンジン制御ユニット400には、吸入空気量を検出するエアフロメータ410や、クランクシャフト111の回転数であるエンジン回転数Neを検出するクランクポジションセンサ420、スロットルバルブの開度を検出するスロットルポジションセンサ430などが接続されている。また、エンジン制御ユニット400は、必要に応じてこれらのセンサによって検出された情報をパワーマネジメントコントロールコンピュータ500に送信する。
【0033】
バッテリ監視ユニット250、モータ制御ユニット300、エンジン制御ユニット400の他にも、パワーマネジメントコントロールコンピュータ500には、アクセルの操作量を検出するアクセルポジションセンサ510、シフトレバーの操作位置を検出するシフトポジションセンサ520、車速を検出する車速センサ530などが接続されている。
【0034】
また、パワーマネジメントコントロールコンピュータ500には、運転者がドライブモードを選択するためのドライブモードセレクトスイッチ540と、後述するシーケンシャルモードにおける変速段を選択するためのシフトスイッチ550が接続されている。
【0035】
パワーマネジメントコントロールコンピュータ500は、アクセルの操作量と車速とに基づいてリングギア132に出力すべき要求トルクを算出し、この要求トルクに対応する要求動力がリングギア132に出力されるように、エンジン110、第1のモータジェネレータ120、第2のモータジェネレータ150を制御する。
【0036】
例えば、エンジン110が出力する動力の一部を利用して第1のモータジェネレータ120を駆動し、そこで発電された電力を利用して第2のモータジェネレータ150を駆動することによってエンジン110の動力に第2のモータジェネレータ150の動力を加えて駆動輪190L,190Rを駆動する。こうしてエンジン110が出力する動力の一部を第1のモータジェネレータ120に分配するととともに、第2のモータジェネレータ150の動力によって駆動をアシストすることにより、エンジン回転数Neを調整し、エンジン110を効率のよい運転領域で運転させつつ、要求動力が得られるようにする。
【0037】
また、要求動力が大きい加速時などには、バッテリ200から第2のモータジェネレータ150に電力を供給し、第2のモータジェネレータ150によるアシスト量を増大させてより大きな動力を出力する。
【0038】
更に、バッテリ200の充電残量が少ないときには、エンジン110の運転量を増大させ、第1のモータジェネレータ120における発電量を増大させることにより、バッテリ200に電力を供給する。一方で、バッテリ200の充電残量が十分に確保されている場合には、エンジン110の運転を停止して要求動力に見合う動力を第2のモータジェネレータ150のみからリングギア132に出力するモータ運転も可能である。
【0039】
また、本実施形態のパワーマネジメントコントロールコンピュータ500には、上述したようにドライブモードセレクトスイッチ540が接続されている。そして、特許文献1に記載されている発明と同様に、運転者がこのドライブモードセレクトスイッチ540を操作することにより、システム電圧VHを制限し、燃費の向上を図ることができるようになっている。なお、本実施形態におけるシステム電圧VHとは、インバータ210と各モータジェネレータ120,150との間でやりとりされる電力の電圧のことである。
【0040】
本実施形態のハイブリッドシステム100にあっては、通常運転モードの他に、パワーモードとエコモードを選択することができるようになっている。そして、通常運転モードのときにはシステム電圧VHを、システム保護の要件に基づいて設定されている最大電圧VHmaxである650ボルトまで昇圧せずに、500ボルトに昇圧するようにしている。そして、パワーモードが選択されたときにシステム電圧VHを最大電圧VHmaxである650ボルトまで昇圧し、出力を向上させるようにしている。一方で、エコモードが選択されたときには、システム電圧VHを500ボルト未満に制限し、より燃料消費量の少ない運転を実現するようにしている。
【0041】
すなわち、本実施形態のハイブリッドシステム100にあっては、通常運転モードとエコモードが、システム電圧VHを最大電圧VHmaxよりも低い電圧に制限する電圧制限モードに相当する。
【0042】
なお、パワーマネジメントコントロールコンピュータ500はドライブモードセレクトスイッチ540の操作によって選択されているモードを優先するが、アクセルの操作量が非常に大きいときには大きな出力が要求されていると判断し、ドライブモードセレクトスイッチ540の操作に依らずに自動的にパワーモードに切り替えることもある。
【0043】
また、本実施形態のパワーマネジメントコントロールコンピュータ500は、特許文献2に記載されている発明と同様に、運転者がシフトスイッチ550やシフトレバーを操作することにより、任意に変速段を切り替えることのできるシーケンシャルモードを備えている。
【0044】
本実施形態のハイブリッドシステム100にあっては、6つの変速段を備える有段変速機を搭載した車両のような運転感覚を演出するために、1速〜6速までの6つの変速段に対応させて図2に示されるように車速に比例して変化する下限エンジン回転数を設定する。なお、図2に示される実線L1〜L6はそれぞれ1速〜6速における下限エンジン回転速度を示している。すなわち、実線L1は1速が選択されているときの車速と下限エンジン回転数との関係を示しており、実線L2は2速が選択されているときの車速と下限エンジン回転数との関係を示している。同様に、実線L3は3速が選択されているときの、実線L4は4速が選択されているときの、実線L5は5速が選択されているときの、実線L6は6速が選択されているときの、車速と下限エンジン回転数との関係をそれぞれ示している。
【0045】
例えば、6つの変速段のうち、3速が選択されている場合には、図2に示される実線L3に沿って車速に応じた下限エンジン回転数を設定する。すなわち、図2に矢印で示されるように車速が「V1」の場合には、下限エンジン回転数が「Ne1」に設定される。
【0046】
そして、パワーマネジメントコントロールコンピュータ500は、この設定された下限エンジン回転数を下回らないようにエンジン回転数Neを制御することにより、車速の変化に比例してエンジン回転数Neが変化する有段変速機を搭載した車両のような運転感覚を演出する。
【0047】
ところで、システム電圧VHを最大電圧VHmaxよりも小さい電圧にすることにより、システム電圧VHを制限した場合には、各モータジェネレータ120,150における定格トルクが低下し、各モータジェネレータ120,150における回生制動力も低減することになる。そのため、システム電圧VHを制限した場合には、エンジン110から分配される動力を十分に回生制動することができずに第1のモータジェネレータ120の回転数やエンジン110の回転数が過剰に高くなってしまうおそれがある。これを抑制するためには第1のモータジェネレータ120の回転数並びに定格トルクとエンジン110の性能曲線を考慮して第1のモータジェネレータ120の回転数に上限を設け、第1のモータジェネレータ120の回転数を制限する必要がある。しかし、第1のモータジェネレータ120の回転数を制限するためには、第1のモータジェネレータ120を駆動しているエンジン110の回転数に上限を設け、エンジン回転数Neを制限する必要がある。
【0048】
シーケンシャルモードにあっては、上述したように下限エンジン回転数を設けてエンジン回転数Neを制御するようにしている。そのため、シーケンシャルモードにより設定されている下限エンジン回転数が、第1のモータジェネレータ120の回転数を制限するために設けられる上限エンジン回転数よりも高い場合には、シーケンシャルモードによって設定された下限エンジン回転数を実現することができなくなってしまう。
【0049】
そこで、本実施形態のパワーマネジメントコントロールコンピュータ500では、シーケンシャルモードによって設定された下限エンジン回転数を下回らないようにエンジン回転数Neを制御しつつ、システム電圧VHを制限することができるように、下限エンジン回転数を考慮してシステム電圧VHを制限するようにしている。
【0050】
以下、本実施形態にかかるシーケンシャルモード時のシステム電圧設定処理について図3〜5を参照して説明する。
図3に示されるシステム電圧設定処理は、シーケンシャルモードによる制御が実行されているときにパワーマネジメントコントロールコンピュータ500によって所定の制御周期で繰り返し実行される。
【0051】
この処理が開始されると、パワーマネジメントコントロールコンピュータ500は、図3に示されるようにまずステップS100において、車速と選択されている変速段とに基づいて必要エンジン回転数Ne*を算出する。具体的には、図2を参照して説明したように、選択されている変速段と車速とに基づいて下限エンジン回転数を算出し、この下限エンジン回転数を必要エンジン回転数Ne*とする。なお、下限エンジン回転数に所定のマージンを加算して必要エンジン回転数Ne*を算出するようにしてもよい。
【0052】
こうして必要エンジン回転数Ne*を算出すると、パワーマネジメントコントロールコンピュータ500は、ステップS120において必要エンジン回転数Ne*と必要エンジントルクTe*とに基づき、必要ジェネレータ回転数Ng*と必要ジェネレータトルクTg*を算出する。
【0053】
なお、必要エンジントルクTe*は、パワーマネジメントコントロールコンピュータ500における周知の出力制御を通じて算出されるエンジン110が出力すべき要求トルクの値である。
【0054】
ここでは、図4の共線図に示される関係を利用して、エンジン回転数Neを必要エンジン回転数Ne*に保持しつつ、必要エンジントルクTe*を実現するために必要な第1のモータジェネレータの回転数Ng並びにトルクTgを算出し、これらの値を必要ジェネレータ回転数Ng*、必要ジェネレータトルクTg*とする。
【0055】
上述したように本実施形態にかかる動力分割機構130におけるプラネタリ比は「ρ」であるため、共線図におけるサンギア131に対応する軸「S」からプラネタリキャリア134に対応する軸「C」までの距離と軸「C」からリングギア132に対応する軸「R」までの距離との関係は、図4に示されるように「1:ρ」になる。
【0056】
エンジン110のクランクシャフト111はプラネタリキャリア134に連結されており、第1のモータジェネレータ120はサンギア131に連結されているため、第1のモータジェネレータ120の回転数であるジェネレータ回転数Ngとエンジン回転数Neは図4に示されるように共線図上に示すことができる。
【0057】
図4の共線図に示される関係からリングギア132の回転数Nrとエンジン回転数Neとジェネレータ回転数Ngとの関係は、下記の数式(1)で表すことができる。
【0058】
【数1】
なお、リングギアの回転数Nrは、車速とリングギア132から駆動輪190L、190Rまで間の減速比とに基づいて算出することができる。
【0059】
したがって、車速に基づいて算出されるリングギア132の回転数Nrと必要エンジン回転数Ne*を上記の数式(1)に代入すれば、必要ジェネレータ回転数Ng*を算出することができる。ステップS110では、このように数式(1)に示される関係を利用することにより、必要ジェネレータ回転数Ng*を算出する。
【0060】
また、エンジン110が出力するトルクTeは、リングギア132とサンギア131に分配される。動力分割機構130におけるプラネタリ比は「ρ」であるため、エンジン110が出力するトルクTeとサンギア131に分配されるトルクTesとの関係は下記の数式(2)で表すことができる。
【0061】
【数2】
したがって、図4に下向きの矢印で示されるようにこの分配されるトルクTesを相殺するために必要なジェネレータトルクTgは下記の数式(3)によって算出することができる。
【0062】
【数3】
ステップS110では、この数式(3)に示される関係を利用して、必要エンジントルクTe*が出力されたときに分配されるトルクTesを相殺するために必要なジェネレータトルクTgを必要ジェネレータトルクTg*として算出する。
【0063】
より具体的には、数式(3)にエンジントルクTeとして必要エンジントルクTe*を代入し、算出されたジェネレータトルクTgを必要ジェネレータトルクTg*とする。
こうして必要ジェネレータ回転数Ng*と必要ジェネレータトルクTg*を算出すると、パワーマネジメントコントロールコンピュータ500はステップS120において、必要ジェネレータ回転数Ng*と必要ジェネレータトルクTg*に基づいて必要システム電圧VH*を算出する。
【0064】
具体的には、図5に示されるような演算マップを利用して必要システム電圧VH*を算出する。この演算マップには、図5に示されるように必要ジェネレータ回転数Ng*、必要ジェネレータトルクTg*の大きさに応じて7つの領域Z1、Z2、Z3、Z4、Z5、Z6、Z7が区画されており、各領域にはそれぞれ異なる大きさの必要システム電圧VH*の値が設定されている。なお、この演算マップにあっては、必要ジェネレータ回転数Ng*が高いほど、また必要ジェネレータトルクTg*が高いほど、高い必要システム電圧VH*が算出されるように各領域に対する必要システム電圧VH*の値が設定されている。また、各領域に対して設定されている必要システム電圧VH*の値は予め行う実験などの結果に基づいて、その領域内に規定される状態(ジェネレータ回転数Ng、ジェネレータトルクTg)で第1のモータジェネレータ120を運転させるために必要なシステム電圧VHの大きさに基づいて設定されている。
【0065】
ステップS120では、こうした演算マップを利用して、図5に矢印で示されるように必要ジェネレータ回転数Ng*と必要ジェネレータトルクTg*を実現する点Pが属する領域に対して設定されている必要システム電圧VH*の値を読み出すことにより、必要システム電圧VH*を算出する。具体的には、図5に示されるように必要ジェネレータ回転数Ng*が「Ng1」であり、必要ジェネレータトルクTg*が「Tg1」である場合には、点Pが属する領域は「Z5」であるため、この領域Z5に対して設定された必要システム電圧VH*を読み出し、これを必要システム電圧VH*とする。
【0066】
こうして必要システム電圧VH*を算出すると、ステップS130へと進み、パワーマネジメントコントロールコンピュータ500は、算出された必要システム電圧VH*と選択されているドライブモードにおけるシステム電圧VHの設定値である制限システム電圧VHLとを比較し、そのうちの大きい方の値をシステム電圧VHとする。
【0067】
そして、ステップS140へと進み、ステップS130を通じて設定されたシステム電圧VHと最大電圧VHmaxとを比較し、そのうちの大きい方の値を最終的にシステム電圧VHとして設定する。
【0068】
本実施形態のパワーマネジメントコントロールコンピュータ500は、シーケンシャルモードによる制御が実行されているときに、上記のようなシステム電圧設定処理を繰り返し実行することにより、システム電圧VHを設定する。
【0069】
(作用)
このようなシステム電圧設定処理をシーケンシャルモード時に繰り返し実行することにより、下限エンジン回転数に基づいて運転されるエンジン110から分配されるトルクTesを第1のモータジェネレータ120における回生制動によって相殺するために必要なシステム電圧VHが必要システム電圧VH*として算出されるようになる。そして、この算出された必要システム電圧VH*を確保できる範囲でシステム電圧VHが制限されるようになる。
【0070】
以上説明した実施形態によれば、以下の効果が得られるようになる。
(1)下限エンジン回転数に基づいて運転されるエンジン110から分配されるトルクTesを第1のモータジェネレータ120における回生制動によって相殺することができる範囲でシステム電圧VHが制限されるようになる。そのため、システム電圧VHを制限しつつ、エンジン110から第1のモータジェネレータ120に分配されるトルクTesを電力に変換することによって消費し、第1のモータジェネレータ120の回転数Ngを保持することができる。そのため、下限エンジン回転数を下回らないようにエンジン110を運転させつつ、第1のモータジェネレータ120の回転数が過剰に高くなることを抑制することができる。
【0071】
したがって、シーケンシャルモードによって設定される下限エンジン回転数によるエンジン回転数Neの制御を実現しつつ、システム電圧VHを制限することができる。
なお、上記の実施形態にあってはドライブモードセレクトスイッチ540を備え、ドライブモードセレクトスイッチ540の操作によって通常運転モードとパワーモード、エコモードを切り替える例を示したが、本発明はこうした切り替え用のスイッチを備えるものに限って適用されるものではない。すなわち、ドライブモードセレクトスイッチ540のような切り替え用のスイッチを備えていなくても、システム電圧VHを制限する電圧制限モードによる運転を実現することができるものであれば、本発明を適用することができる。
【0072】
例えば切り替え用のスイッチを備えず、アクセルの操作量が非常に大きいときには大きな出力が要求されていると判断してパワーモードを選択してシステム電圧VHを最大電圧まで昇圧させて制御を行う一方、アクセルの操作量が比較的小さいときにはシステム電圧VHを制限した通常運転モードによる制御を行うものに本発明を適用することもできる。
【符号の説明】
【0073】
100…ハイブリッドシステム、110…エンジン、111…クランクシャフト、112…ダンパ、120…第1のモータジェネレータ、130…動力分割機構、131…サンギア、132…リングギア、133…プラネタリギア、134…プラネタリキャリア、140…リダクションギア、141…サンギア、143…プラネタリギア、144…プラネタリキャリア、150…第2のモータジェネレータ、160…カウンターギア、170…ファイナルギア、180…ディファレンシャル、190L,190R…駆動輪、200…バッテリ、210…インバータ、220…コンバータ、230…バッテリ電流センサ、240…バッテリ温度センサ、250…バッテリ監視ユニット、300…モータ制御ユニット、320,350…回転センサ、400…エンジン制御ユニット、410…エアフロメータ、420…クランクポジションセンサ、430…スロットルポジションセンサ、500…パワーマネジメントコントロールコンピュータ、510…アクセルポジションセンサ、520…シフトポジションセンサ、530…車速センサ、540…ドライブモードセレクトスイッチ、550…シフトスイッチ。
【特許請求の範囲】
【請求項1】
エンジンと、第1のモータジェネレータと、前記エンジンの動力を前記第1のモータジェネレータに分配する動力分割機構と、駆動輪と前記動力分割機構との間に連結される第2のモータジェネレータと、前記第1のモータジェネレータ及び前記第2のモータジェネレータとの間で電力の授受を行うバッテリと、前記バッテリの電力を昇圧して前記第1のモータジェネレータ及び前記第2のモータジェネレータに電力を供給するコンバータとを備え、制御モードとして、前記コンバータによって昇圧されるシステム電圧を最大電圧よりも低い電圧に制限した状態で車両を制御する電圧制限モードと、選択された変速段に応じて車速に比例して変化する下限エンジン回転数を設定するシーケンシャルモードとを有するハイブリッド車両の制御装置であり、
前記電圧制限モードによりシステム電圧を制限する際に、前記シーケンシャルモードにより下限エンジン回転数を設定しているときには、前記動力分割機構を通じて分配されるトルクを前記第1のモータジェネレータにおける回生制動によって相殺するために必要なシステム電圧を算出し、算出されたシステム電圧を下回らないようにシステム電圧を制限するハイブリッド車両の制御装置。
【請求項1】
エンジンと、第1のモータジェネレータと、前記エンジンの動力を前記第1のモータジェネレータに分配する動力分割機構と、駆動輪と前記動力分割機構との間に連結される第2のモータジェネレータと、前記第1のモータジェネレータ及び前記第2のモータジェネレータとの間で電力の授受を行うバッテリと、前記バッテリの電力を昇圧して前記第1のモータジェネレータ及び前記第2のモータジェネレータに電力を供給するコンバータとを備え、制御モードとして、前記コンバータによって昇圧されるシステム電圧を最大電圧よりも低い電圧に制限した状態で車両を制御する電圧制限モードと、選択された変速段に応じて車速に比例して変化する下限エンジン回転数を設定するシーケンシャルモードとを有するハイブリッド車両の制御装置であり、
前記電圧制限モードによりシステム電圧を制限する際に、前記シーケンシャルモードにより下限エンジン回転数を設定しているときには、前記動力分割機構を通じて分配されるトルクを前記第1のモータジェネレータにおける回生制動によって相殺するために必要なシステム電圧を算出し、算出されたシステム電圧を下回らないようにシステム電圧を制限するハイブリッド車両の制御装置。
【図1】

【図2】

【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−6444(P2013−6444A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−138550(P2011−138550)
【出願日】平成23年6月22日(2011.6.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月22日(2011.6.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]