
パターンをエッチングする装置及び方法
【課題】ペン操作での基板のエッチングにおいて、パターン再生の正確性は操作者の技量に大きく依存する。
【解決手段】基板材料上に配置されたエッチング領域内にパターンをエッチングする装置であって、基板4に対するエッチングヘッド12の位置及び向きを計測するユニットと、計測されたエッチングヘッド12の位置及び向きの関数としてエッチング地点の座標を計算し、エッチング地点について計算された座標が予め記憶されたパターンの図面内に符号化されたエッチングされるべき地点の座標と一致する場合、エッチングを開始し、一致しない場合、エッチングを自動的に停止する制御ユニット14とを備えている。
【解決手段】基板材料上に配置されたエッチング領域内にパターンをエッチングする装置であって、基板4に対するエッチングヘッド12の位置及び向きを計測するユニットと、計測されたエッチングヘッド12の位置及び向きの関数としてエッチング地点の座標を計算し、エッチング地点について計算された座標が予め記憶されたパターンの図面内に符号化されたエッチングされるべき地点の座標と一致する場合、エッチングを開始し、一致しない場合、エッチングを自動的に停止する制御ユニット14とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、基板材料上に配置されたエッチング領域内にパターンをエッチングするための装置及び方法に関する。また、本発明は、このエッチング方法を行うためのデータ記憶媒体、ペン及びターミナルにも関する。
【0002】
「エッチング」という用語は、基板に孔を掘る行為を意味する。孔は、通し孔であっても、なくてもよい。互いに隣接する通し孔を設けることにより、基板を切断することができる。めくら孔の形成により、パターンを基板内で浮き彫り状にエッチングすることができる。
【0003】
本発明は、「非接触」エッチング装置、すなわち、エッチングヘッドがエッチングされる基板と直接的な機械的接触をすることのない装置に関する。
【背景技術】
【0004】
エッチング装置は、エッチング領域に対して、手で自由に動かすことができる少なくとも1本のペンを備えている。ペンは、エッチングが開始されたとき、エッチング地点において基板をエッチングすることができるエッチングヘッドを備えている。
【0005】
このような装置は、例えば、特許文献1(米国特許4,564.736号明細書)その他に開示されている。この公知の装置において、エッチングヘッドは、操作者によって自由に動かされる。従って、この装置では、エッチングされるべき基板上での動きが制約されることは、ほとんどない。基板は、如何なるサイズのものであってもよいし、如何なる角度で傾いていてもよい。したがって、この装置は、構造物の壁、天井又は床、プレートから、その他に至るまで、板上に様々なパターンをエッチングするために用いることができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第4564736号
【特許文献2】独国特許出願第102004054940号
【特許文献3】独国特許出願第3906336号
【特許文献4】米国特許第5436027号
【特許文献5】仏国特許出願第2831258号
【特許文献6】独国特許出願第4429751号
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、これらの公知の装置において、基板内のパターン再生の正確性は、操作者の技量に大きく依存している。これは、ペンを管理してエッチングを開始するのは、操作者のみであるからである。
【0008】
更に、破片が飛び散るのを防止するため、操作者は、ペンを基板から遠ざける傾向がある。しかしながら、ペンが基板から遠くなればなるほど、正確にエッチングすることは難しくなる。したがって、ペンと基板の距離をできるだけ遠くすることが要求される安全性と、ペンを基板にできるだけ近づけることが要求される正確性との間で、妥協が存在することになる。
【課題を解決するための手段】
【0009】
本発明は、上記問題点の少なくとも1つを解決することを目的としている。本発明の1つの主題は、エッチング装置において、
−基板に対するエッチングヘッドの位置及び向きを計測するユニットと、
−制御ユニットであって、
・エッチングヘッドの計測された位置及び向きの関数として、エッチング地点の座標を計算し、
エッチング地点について計算された座標が、予め記憶されたパターンの図面において符号化されているエッチングされるべき地点の座標と一致した場合、エッチング地点におけるエッチングを開始し、一致しない場合には、エッチングを自動的に停止する制御ユニットを備えている。
【0010】
上記の装置では、エッチングされる地点の座標に一致するエッチング地点のみが、エッチングされる。そのため、基板上にエッチングされるべきパターンの再生の正確性は、操作者の技量に依存することはなくなる。
【0011】
さらに、不正確な地点へのエッチングは、ペンを基板から隔てる距離とは無関係に防止される。よって、操作者は、パターンのエッチングにおける正確性に影響を与えることなく、ペンを基板から安全な距離に保持することができる。
【0012】
さらに、ペンは基板に対して手動で自由に動かせるままであるので、非常に幅広い種類の基板にエッチングを行うことができる。
【0013】
上記のエッチング装置の実施形態においては、以下の特徴の少なくとも1つを備えることができる。
■装置は、少なくとも1つの取り外し可能な基準ターミナルを備え、基準ターミナルは、手動で基板上に配置することができ、基板上における基準ターミナルの位置に依存しない所定の関係により、エッチングされるべきパターンの対応する地点に関連付けられており、計測ユニットは、基準ターミナルに対するエッチングヘッドの位置及び向きを計測可能であり、制御ユニットは、計算されたエッチング地点の座標と、パターンの地点と基準ターミナルを関連付ける所定の関係の関数としてのエッチングされるべき地点の座標との一致又は不一致を選択的に確定するようになっている。
■装置は、
−少なくとも2個の基準ターミナルを備え;
−計測ユニットは、これら2個の基準ターミナル間の距離を計測可能であり、
−制御ユニットは、計算されたエッチング地点の座標と、計測された2個の基準ターミナル間の距離の関数としてのエッチングされるべき地点の座標との一致又は不一致を選択的に確定し、この距離に比例して、パターンを拡大又は縮小する。
■装置は、基準ターミナルとは独立に手動で配置され得る少なくとも1つの中継ターミナルを備え、この中継ターミナルは、基板に対するその位置に依存しない所定の関係により、パターンの地点と関連付けられてはおらず、計測ユニットは、更に、
−中継ターミナルの座標系におけるエッチングヘッドの位置及び向きを検出するセンサと、
−基準ターミナルに対する中継ターミナルの位置及び向きを検出するセンサと、
−中継ターミナルの座標系において計測されたエッチングヘッドの位置及び向きを、基準ターミナルに対する位置及び向きに変換する変換器とを備えている。
■エッチングヘッドは、エッチング地点をエッチングするレーザー光線を放射可能である。
■装置は、テーブルを備え、テーブルは、エッチングにより飛散する破片に対する保護のための窓と、基板への載置のための脚とを備え、少なくとも1つの基準ターミナルが、このテーブルに対して自由度無しで固定されている。
■エッチングヘッドは、エッチング地点をエッチングする研磨材料からなる粒子を噴射可能である。
【0014】
本装置のこれらの実施形態は、更に、以下のような利点を有する:
−予め記憶された図面のエッチングされるべき個処に関連付けられた基準ターミナルを用いることにより、パターンを基板上に簡単に配置することができる。
−中継ターミナルを用いることにより、ペンの位置を計測するために用いられる信号の出力を増大させることなく、エッチング領域の大きさを増大させることができる。
−上記のテーブルを用いることにより、単一の操作で、基準ターミナルと保護窓を配置することができる。
【0015】
本発明の他の主題は、基板材料上に配置されたエッチング領域内にパターンをエッチングする方法において、
−エッチングが開始されたときに、エッチング地点において基板のエッチングを行い得るエッチングヘッドを備えるペンを、手動でエッチング領域上に自由に動かす工程と、
−基板に対するエッチングヘッドの位置及び向きを計測する工程と、
−計測されたエッチングヘッドの位置及び向きの関数として、エッチング地点の座標を計算する工程と、
−エッチング地点について計算された座標が、予め記憶されたパターンの図面において符号化されているエッチングされるべき地点の座標と一致する場合、エッチング地点におけるエッチングを開始させ、一致しない場合、エッチングを自動的に中止させる工程と
を備えている。
【0016】
本発明のエッチング方法の実施形態は、以下の特徴の少なくとも1つを備えていてもよい。
a)エッチングの開始により既にエッチングがなされたパターンの各地点をメモリに記憶する工程と、
b)既にエッチングがなされた地点のエッチングを禁止する工程と、
c)1つの地点のエッチングを、エッチングの開始後、所定時間後に自動的に停止する工程。
■工程a)〜c)は、予め記憶された図面の各層について繰り返され、予め記憶された図面は、少なくとも2つの層を備え、各層は、対応する基板の層におけるエッチングされるべき地点の座標で符号化されている。
■方法は、
−所与のエッチング地点をエッチングするために費やされた累積時間をカウントする工程と、
−カウントされたエッチング時間が所定の閾値を超えた場合、そのエッチング地点における更なるエッチングを禁止し、超えていない場合、その地点における更なるエッチングを許容する工程と
を備えている。
■本発明の方法は、計測されたエッチングヘッドの位置及び向きを用いて、ペンを基板から隔てる距離を決定する工程と、この距離が所定の閾値よりも小さい場合、基板へのパターンのエッチングを禁止するか、又は警報を発する工程とを備えている。
【0017】
本方法のこれらの実施形態は、更に、以下のような利点を有している。
−所定時間後にエッチングを自動的に停止することにより、エッチング深さを制御することができる。
−予め記憶された図面の各層の地点のエッチングを自動的に停止することにより、浮彫りで彫刻模様を作成することができる。
−距離hを計測することにより、操作者がエッチングヘッドを基板から安全な距離に保つことが容易となり、本方法における安全性は向上する。
【0018】
本発明の他の主題は、電子処理装置で実行される、上記のエッチング方法を行うための命令を備えるデータ記憶媒体である。
【0019】
本発明の他の主題は、上記のエッチング方法で用いられるペンであり、このペンは、エッチング領域の上方で、手により動かし得るエッチングヘッドと、基板に対するエッチングヘッドの位置を計測可能な計測ユニットの少なくとも幾つかの構成要素とを備えている。
【0020】
本発明は、添付図面を参考にして、限定を与えるものではない例として示す以下の説明を読むことで、より理解しうると思う。
図面において、同一の構成要素には、同一の符号を付してある。
【図面の簡単な説明】
【0021】
【図1】エッチング装置の第1の実施形態を示す概略斜視図である。
【図2】図1の装置で用いられるエッチング方法を示すフローチャートである。
【図3】エッチング装置の第2の実施形態を示す概略斜視図である。
【図4】持ち運び可能なエッチング装置の第3の実施形態を示す概略平面図である。
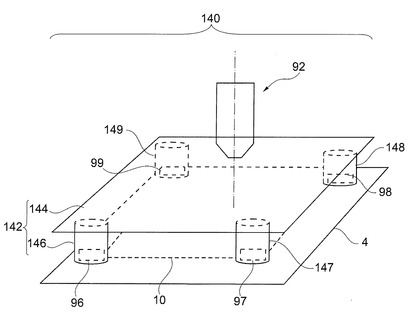
【図5】エッチング装置の第3の実施形態を示す概略斜視図である。
【発明を実施するための形態】
【0022】
以下の記述では、本技術分野の当業者に公知の特徴及び機能については、詳細に説明することはしない。
【0023】
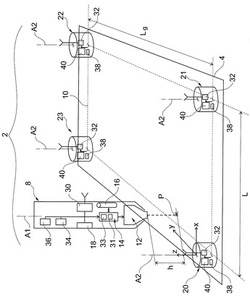
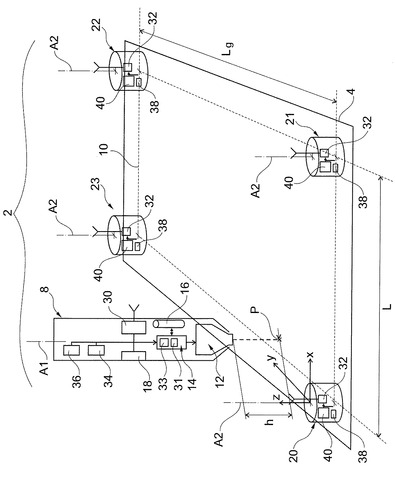
図1は、水平な物理基板にパターンをエッチングするための装置2を示す。
【0024】
ここで、「パターン」という用語は、基板4上でエッチングされ得る任意の種類のパターンを意味する。このパターンは、写真、テキスト、幾何学パターン、又は型模様等である。
【0025】
基板4は、平坦で水平な上面を有している。基板4は、エッチングされ得る材料から作られている。この材料は、例えば、金属、プラスチック、ガラス、木、紙、革等である。
【0026】
実施形態において、装置2は、持ち運び可能、すなわち、持ち上げ用手段を必要とせずに、人により直接搬送され得るものである。具体的には、装置2の構成要素の重量は、典型的には10kgよりも軽く、望ましくは5kg又は1kgよりも軽い。本装置を容易に搬送するため、装置2の全ての構成要素の体積は、典型的には0.15m3よりも小さく、望ましくは、10-3m3又は10-4m3よりも小さい。
【0027】
装置2は、エッチング領域10の全域にわたって、操作者により手で動かし得るペン8を備えている。エッチング領域10は、基板の上面に設けられ、パターンは、エッチング領域10の内部にエッチングされる。ペン8は、ゼロでない閾値S1よりも大きな高さhだけ、基板4から離間しており、そのため、ペンが基板に直接接触しないようになっている。
【0028】
この実施形態において、エッチング領域10は、幅Lと長さLgを有する矩形である。
【0029】
ペン8は、ほぼ長手方向軸A1に沿って延びている。ペン8の寸法は、操作者の手によって容易に操作できるように選択される。例えば、ペンの長さは、20cmよりも短く、幅は、5cmよりも小さい。ペン8の重量は、典型的には1kgよりも軽く、望ましくは200gよりも軽い。
【0030】
ペン8は、基板4をエッチングするために必要な全ての要素を備えたエッチングヘッド12を備えている。例えば、本実施形態において、ヘッド12は、レーザー光線源を備えている。例えば、光線源は、波長808nmで出力2Wの放射をするレーザーダイオードである。したがって、ヘッド12は、エッチング地点において、基板4をエッチングすることのできるレーザー光線を放射する。地点Pは、照準線と基板の交点上に位置している。ここで、照準は、軸A1と一致している。
【0031】
ペン8は、更に、
−エッチングヘッド12を制御するユニット14と、
−基板4上にエッチングされるべきパターンの図面を記憶したメモリ16と、
−インターフェース18と、
−ペンを動作させるのに必要な、電池等のエネルギー源(図示せず)とを備えている。
【0032】
ユニット14は、メモリ16に接続されている。メモリ16に記憶された図面は、パターンを形成するために、エッチングされるべき各地点の座標を符号化している。より正確には、本実施形態において、図面は、所定の順序で積み重ねられた複数の層に分割されている。各層は、エッチングされるべきパターンの断面、及びエッチング深さに対応している。基板に垂直な方向に積み重ねられた層は、エッチングされるべき3次元パターンを形作っている。一例として、各層は、ビットマップ(bmp)形式で記憶されている。よって、各層は、地点の行列から形成され、各地点において、列は、その座標に加えて、この地点がエッチングされるか否かを示している。ビットマップ列の地点がイメージを符号化するのに例えて、以下の説明では、列の地点をピクセルと言う。本実施形態では、図面は矩形をしている。
【0033】
制御ユニット14は、データ記憶媒体に記憶されている命令を実行できるプログラム可能な電子処理装置である。具体的には、メモリ16は、図2の方法を実行するために必要な命令を含んでいる。これらの命令は、ユニット14により実行される。
【0034】
インターフェース18により、ペン8は、エッチングされるべきパターンの図面をメモリ16内に記憶するために、コンピュータに接続される。
【0035】
装置2は、更に、基板4上に手動で配置され得る移動可能な基準ターミナルを備えている。一例として、本実施形態においては、本装置は、4個の基準ターミナル20〜23を備えている。
【0036】
ターミナル20〜23は、既存の基板4に加えられる。したがって、これらは、基板4と機械的に独立なものである。これらは、操作者により、自由に、基板4上に配置され得る。本実施形態において、ターミナルは、基板4上に載置され、基板上の所定の位置に重力によってのみ保持されている。
【0037】
各基準ターミナルは、基板上でのターミナルの位置に依存しない所定の関係により、エッチングされるべきパターンの地点と関連付けられている。この所定の関係は、例えば、メモリ16内に記憶されている。本実施形態において、この所定の関係は、ターミナル20〜23の各々が、矩形図面の頂点に対応することを示している。したがって、これらのターミナルは、エッチング領域10の境界を画定している。
【0038】
装置2は、基準ターミナル20〜23に対するエッチングヘッドの位置及び向きを計測するための装置を備えている。この装置は、エッチングヘッドの6個の自由度を計測する。具体的に、エッチングヘッドの位置及び向きは、それぞれ、ターミナルに対して自由度無しで固定された直交座標系XYZ内で表現された3つの座標の2つの組x、y、z及びθx、θy、θzにより与えられる。ここで、座標系XYZのX及びY方向は、基板4の上面に対して平行であり、Z方向は垂直である。角度θx、θy、θzは、それぞれ、軸A1がX、Y及びZ方向となす角度である。
【0039】
エッチングヘッド12の位置を決定するため、本実施形態では、ペン8及びターミナル20〜23は、それぞれ、電磁波送信機/受信機30及び32を備えている。例えば、送信機/受信機30及び32は、超広帯域幅(UWB)送信機/受信機である。これらの送信機/受信機の各々は、送信機/受信機間の電磁波の伝播時間の計測を可能とするために、電磁波の送信及び受信の瞬間を計測することができるクロックを備えている。
【0040】
更に、ユニット14は、プロセッサー33及びクロック31を備えている。プロセッサー33は、計測された伝播時間に基づいて、ペン8と各ターミナル20〜23との距離を決定する。
【0041】
エッチングヘッドの向きは、ここでは、エッチングヘッドに沿った軸A1の向きにより表される。したがって、エッチングヘッド12の向きは、角度θx、θy及びθzを計測することにより計測される。このため計測装置は、更に、
−ペン8に対して自由度無しで固定された加速度計34及び磁力計36と、
−ターミナル20〜23の各々に対して自由度無しで固定された加速度計38及び磁力計40とを備えている。
【0042】
例えば、加速度計34と磁力計36は、ペン8に内蔵されている。加速度計38と磁力計40は、ターミナル20〜23の各々に内蔵されている。
【0043】
加速度計34は、軸A1が地球の重力場の局所的方向により表される鉛直方向となす角度を計測する。磁力計36は、軸A1が地球の磁場のN極となす角度を計測する。
【0044】
望ましくは、加速度計34及び磁力計36は、軸A1の向きの計測における正確性を増すために、ペン8のエッチングヘッド12から最も遠い部分に配置されている。
【0045】
加速度計38は、基準ターミナルと整列した軸A2が鉛直方向となす角度を計測する。磁力計40は、軸A2が磁北となす角度を計測する。このため、磁力計40及び磁力計36は、三軸磁力計である。
【0046】
軸A2の向きは、基板4の上面の向きを表さなければならない。このため、ここでは、各基準ターミナルは、基板4上に配置されたときに、軸A2が基板4の上面に対して必ず垂直となるように設計されている。例えば、各基準ターミナルは、軸A2に垂直な少なくとも1つの平坦面を備えており、基板4の上面に直接支持されるようになっている。望ましくは、各基準ターミナルは、最大で2つの平坦面を備えており、ターミナルの他の面は凹状となっている。この実施形態において、各ターミナルは、円柱形をしており、軸A2は、円柱の回転中心軸となっている。
【0047】
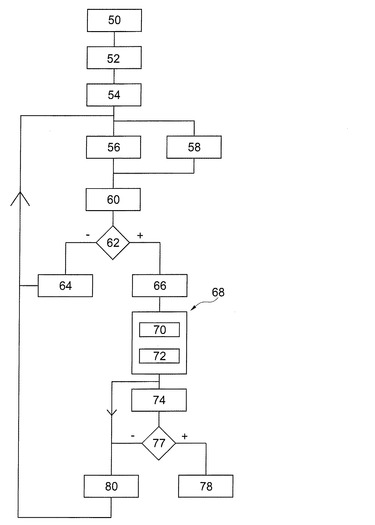
次に、図2の方法と関連して、装置2の作用について、より詳細に説明する。
【0048】
最初に、ステップ50において、エッチングされるべきパターンの図面が、メモリ16内に記憶される。このために、例えば、ペン8が、インターフェース8を介してコンピュータと接続される。
【0049】
次に、ステップ52において、ターミナル20〜23が、手動で基板4上に配置される。本実施形態において、これらは、エッチング領域の頂点を画定するように配置される。
【0050】
ステップ54において、ペン8に電圧が印加され、その結果、ペン8がエッチング領域10に近づくように移動する。その後、記憶された図面のワーキングコピーがまだ存在していない場合、ワーキングコピーがメモリ16内で自動的に作成される。
【0051】
このようにして、ステップ56においては、ターミナル20〜23に対するエッチングヘッド12の位置が計測される。このため、プロセッサー33は、送信機/受信機20によって送信された電磁波が、ターミナル20〜23まで伝播するために要する時間を計測する。これらの伝播時間は、その後、エッチングヘッド12をターミナル20〜23の各々から隔てる距離を決定するために、装置14によって用いられる。同様に、ステップ56においては、ターミナル20〜23をお互いから隔てる距離が計測される。これらの異なる伝播時間を用いて、ユニット14は、座標系XYZにおけるエッチングヘッド12の座標x、y及びzを、三角測量を用いて決定する。
【0052】
並行して、ステップ58においては、また、X、Y及びZ方向に対する軸A1の向きが計測される。このために、加速度計34及び磁力計36は、それぞれ、鉛直方向及び磁北に対する軸A1の向きを計測する。同時に、ターミナル20〜23の各々の加速度計38及び磁力計40は、それぞれ、鉛直方向及び磁北に対する軸A2の向きを計測する。これらの計測値は、その後、ユニット14に送られ、ユニット14は、これらを組み合わせて、座標系XYZにおける軸A1の角座標θx、θy及びθzを得る。
【0053】
計測されたペン8の位置及び向きを用いることにより、ステップ60において、ユニット14は、エッチングヘッド12を基板4から隔てる垂直距離h(図1参照)と、軸A1と鉛直方向Z間の角度θzを決定する。
【0054】
ステップ62において、ユニット14は、その内部でエッチングが可能である錐体の中に、ペン8が位置しているかを確認する。この錐体は、基板4の平面に対して略垂直に置かれている。このために、距離h及び角度θzの絶対値が、それぞれ、所定の閾値S1及びS2と比較される。距離hが閾値S1よりも小さいか、又は角度θzの絶対値が閾値S2よりも小さければ、ステップ64において、基板のエッチングは自動的に禁止される。このように、閾値S1及びS2は、その内部でエッチングが可能である錐体を定める。ペンがこの錐体の内部にない場合、すなわち、ペンが基板に近すぎるか、又は基板に対して傾きすぎている場合、エッチングは、正確に又は最適な安全条件のもとで実行し得ないので、禁止される。例えば、閾値S1は、操作者が飛散した破片により傷つけられることを防止するために考慮されなければならない安全距離に対応している。
【0055】
これが当てはまらない場合には、ステップ66に進み、基板4上におけるエッチング地点P(図1)の座標を計算する。地点Pの座標は、計測されたエッチングヘッドの座標x、y、z及びθz、θy、θzから得られる。例えば、地点Pの座標は、軸A1とエッチング領域10との交点の座標を計算することにより得られる。
【0056】
次に、ステップ68において、ユニット14は、地点Pの座標が、予めメモリ16内に記憶された図面のワーキングコピー内で符号化されている地点の座標に一致するか否かを判定する。このため、各基準ターミナルのパターンの地点に対する所定の関係が用いられる。
【0057】
例えば、これがまだ行われていない場合、工程70において、ユニット14は、ペン8に対する異なるターミナル20〜23の位置、及び計測されたターミナル20〜23間の距離に基づいて、エッチング領域10の寸法を計算する。次に、この工程70において、ユニット14は、座標系XYZ内で表された地点Pの座標を、エッチングされるべきパターンの図面のピクセルに対応する座標に変換するためのストレッチファクターを計算する。例えば、それぞれX及びY方向の2つのストレッチファクターCx及びCyが以下の計算式を用いて計算される:
Cx=(Limg/L)
Cy=(Lgimg/Lg)
ここで、Limg及びLgimgは、それぞれ、エッチングされるべきパターンの図面の幅及び長さである。
【0058】
したがって、ターミナル間の距離は、エッチングされるべきパターンの寸法を定める。換言すると、基準ターミナルが互いに離れるほど、エッチングされるべきパターンは大きくなる。反対に、基準ターミナルが互いに近づくほど、エッチングされるべきパターンは縮小される。この実施形態では、いずれの場合でも、エッチングされるべきパターンは、エッチング領域の全体を占めている。
【0059】
この本実施形態の場合、エッチング領域およびエッチングされるべきパターンは矩形であるので、ストレッチファクターCx及びCyは、地点Pのx、y座標によらずに、一定である。
【0060】
しかしながら、エッチング領域およびエッチングされるべきパターンが同一形状を有していなければ(例えば、仕切られたエッチング領域が台形であり、エッチングされる領域が矩形であれば)、パターンがエッチング領域全体を満たすものとなるように、ストレッチファクターCx及びCyは、地点Pの座標x、yの関数として変化する。
【0061】
ストレッチファクターCx、Cyが確定されたら、工程72において、これらは、地点Pの座標x及びyに対応する図面のピクセルの座標を見出すために用いられる。例えば、座標x及びyは、対応するピクセルの座標xp及びypを得るために、それぞれ、単純にストレッチファクターCx及びCyと掛け合わされる。対応するピクセルが見出されたら、図面のワーキングコピーを含むファイルが、そのピクセルがエッチングされるべきピクセルであるか否かを示している。このため、ユニット14は、図面の層の各々の座標xp及びypのピクセルと関連するデータ項目全体の探索を行う。これらのデータ項目の1つが、そのピクセルがエッチングされるべきものであることを示していれば、そのピクセルは、エッチングされるべきピクセルに相当する。
【0062】
見出されたピクセルがエッチングされるべきピクセルであれば、ステップ74において、ユニット14は、エッチングヘッドが自動的にそのピクセルのエッチングを開始するための信号を送信する。エッチングが開始された後、所定時間Δ後に、エッチングは自動的に終了する。よって、パルス幅Δのレーザーパルスが生成される。時間Δは、短いもので、典型的には、0.1s又は10μsよりも小さい。本実施形態では、エッチングが開始された後、時間Δは、クロック31によりカウントされる。既知のパルス幅のレーザーパルスが生成されるという事実は、この地点Pにおいてペンの各通過により掘られる穴の深さの制御を可能とする。このステップでは、望ましくは、基板上に投射されるレーザー光線の強度は、計測されたペン12の向きの関数として変化する。例えば、強度は、レーザー光線の出力を調整することにより変更される。
【0063】
対応するピクセルが、エッチングされるべきピクセルでない場合、地点Pにおけるエッチングは自動的に禁止される。そのため、ステップ74は実行されず、処理は、ステップ80に直ちに移行する。
【0064】
ステップ74の後、ステップ77において、エッチングされたピクセルの座標は、メモリに記憶される。ここで記載されている実施形態において、ユニット14は、図面のワーキングコピーにおいて、座標xp及びypがエッチングされるべきことを示すデータ項目と関連付けられていたワーキングコピーの層を修正する。より具体的には、この修正は、そのデータ項目を、その層のそのピクセルがエッチングされるべきでものでないことを示すデータ項目と置き換えることを含む。よって、ペンがもう一度、同一地点上を動いた場合、図面のワーキングコピーにおいて、座標xp及びxyのピクセルがエッチングされるべきことを示すデータ項目と関連付けられている層がまだ存在する場合にのみ、その地点が再びエッチングされることになる。そうでない場合には、このピクセルは再びエッチングされることはない。したがって、各地点Pにおけるエッチング深さを制御することが可能となる。
【0065】
ステップ77において、ユニット14は、更に、図面のエッチングされるべき全てのピクセルが、既にエッチングされたか否かを確認する。例えば、この確認は、エッチングされるべきピクセルがまだ存在するかを決定するために、画像のワーキングコピーのピクセルをスキャンすることにより行われる。
【0066】
全てのピクセルが既にエッチングされていたら、処理はステップ78に進み、エッチング方法は自動的に停止する。その後、ペンは、動作停止し、基準ターミナル20〜23は、基板4から取り除かれる。基板4内へのパターンのエッチングは終了する。
【0067】
そうでない場合には、ステップ80において、操作者は、まだエッチングされていないエッチング領域10の部分に向けて、ペンを手動で動かす。このステップ80の後、エッチングされるべきパターンの全てのピクセルが、基板4内にエッチングされてしまわない限り、ステップ56〜80が繰り返される。
【0068】
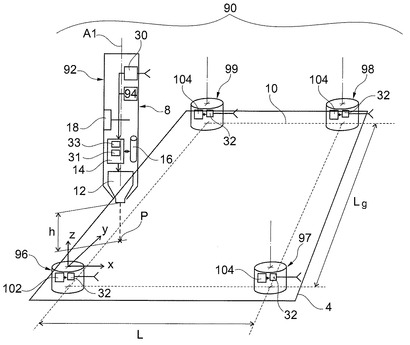
図3は、エッチング装置90を示す。エッチング装置90は、エッチングヘッド12の位置及び向きを計測するための異なるユニットを有している点を除いて、装置2と同様のものである。より正確には、本実施形態における計測ユニットは、少なくとも1つの三軸磁界源と、少なくとも1つの三軸磁界センサを用いて作られている。
【0069】
「三軸磁界源」という語は、少なくとも3つの異なる非同一直線方向にある磁場を生成し得る磁界源を意味する。典型的には、これらの磁場の方向は、互いに直角である。例えば、このような磁界源は、互いに直角な3つの巻軸の周りで各々が巻回された3つのコイルを用いて作られる。例えば、各コイルの巻数は、2つの巻軸の交点Oの両側にほぼ等しく分配されている。このような三軸磁界源は、遠方において、点Oを中心とする3つの異なる磁気双極子としてモデル化し得る。点Oから磁界源の最大寸法の3倍〜4倍だけ離れた地点は、遠方にあると考えられる。磁界源の最大寸法は、例えば、コイルの最大長さに等しい。磁界源は、時間内に同時に又は連続して、放射軸の各々に沿った磁界を生成する。
【0070】
「三軸磁界センサ」という語は、互いに同一直線上にない少なくとも3つの計測軸上に投射される磁界を計測可能なセンサを意味する。典型的には、3つの計測軸は、互いに直角である。このような三軸センサは、例えば、コイルが磁界の保護を計測するために用いられ、磁界を生成するために用いられるのではない点を除いて、三軸センサと同様の方法で製造される。
【0071】
図3の実施形態において、ペン8は、それと同様のペン92に置き換えられている。しかしながら、加速度計34及び磁力計36は、三軸磁界センサ94に置き換えられている。このセンサ94は、ペン92に固定されたもので、例えば、ペンに内蔵されている。
【0072】
ターミナル20〜23は、ターミナル96〜99に置き換えられている。ターミナル96〜99は、加速度計38及び磁力計40がターミナル96においては、三軸磁界源102に置き換えられ、ターミナル97〜99においては、三軸磁界源102に置き換えられている点を除いて、ターミナル20〜23と同一のものである。
【0073】
送信機/受信機30及び32は、ペンと基準ターミナル96〜99間の情報交換を可能とするように、そのままとされている。この情報交換は、例えば、磁界源102とセンサ94〜104を同期させるために用いられる。
【0074】
プロセッサー33は、連立方程式を解くことにより、ターミナル96に対する座標系XYZ領域におけるエッチングヘッド12の位置及び向きを、ゼロ自由度で確定する。この連立方程式は、三軸磁界源102と三軸センサ94間の磁気相互作用のモデルを作ることにより得られる。この連立方程式において、エッチングヘッドの座標x、y、z及びθx、θy、θzは、未知数である。このような連立方程式についての更なる情報は、例えば、ヨーロッパ特許出願第1502544号に見出すことができる。読者は、また、フランス特許出願第0953432号を参照することができる。
【0075】
さらに、この実施形態では、予め記憶された図面は、各ピクセルが所定のエッチング時間Δiと関連付けられた単一の層を備えている。ここで、添え字iは、その層のピクセルと関連付けられたものである。
【0076】
装置90の動作は、図2と関連して記載されたものと、以下の点を除いて同様である。
−エッチングヘッドの位置及び向きの計測方法が異なっており、
−ピクセルがエッチングされるべきか否かの判定方法が異なっている。
【0077】
より明確には、工程72において、ユニットは、座標xp及びypのピクセルが、ワーキングコピーにおいて0ではない正の値のエッチング時間Δiと関連付けられている場合に、エッチングされるべきであると判定する。
【0078】
次に、ステップ74において、地点Pにおけるエッチングが、ペンが動かされず、かつクロック31によりカウントされた時間が時間Δiよりも小さい限り、継続される。反対に、地点Pにおけるエッチングは、
a)クロック31によりカウントされた時間が時間Δiに達したら直ちに自動的に、又は
b)操作者が、ペン92を他の地点P上に動かした場合に停止される。
【0079】
これらエッチングが停止される2つの場合において、ユニット14は、時間Δiとクロック31によりカウントされた時間との差を計算する。次に、ステップ74の最後において、ユニットは、この差を、パターンの図面のワーキングコピーにおける座標xp及びypのピクセルと関連付けられた新たな時間Δiとして記録する。したがって、ワーキングコピーにおいて記憶された時間Δiは、地点Pにおける累積エッチング時間に依存している。よって、本方法もまた、各地点Pにおけるエッチング深さを制御することを可能とするものである。
【0080】
図4は、エッチング装置110を示す。エッチング装置110は、例えば、少なくとも1つの中継ターミナルを備えている点を除いて装置90と同一のものである。図4は、簡明のために、中継ターミナルが1つだけ示されている。
【0081】
中継ターミナル112は、エッチングヘッドの位置及び向きを計測するために用いられる信号の出力を少しも増大させることなく、エッチング領域10の大きさを増大させることを可能にする。より正確には、本実施形態において、中継ターミナル96に組み込まれた磁界源102から放出される磁場の有効範囲は、カバレッジ領域112により表される。ここでは、カバレッジ領域112は、ターミナル97及び98を含むほど遠くまでは及んでいないと仮定される。
【0082】
ターミナル112は、他のターミナル及びペン92と情報を交換するために、送信機/受信機32を備えている。ターミナル112は、また、例えば磁界源102と同様の三軸磁界源116を備えている。磁界源116の有効範囲は、カバレッジ領域118で表される。ターミナル112は、それ自身のカバレッジ領域118がターミナル97及び98を含むほど遠くまで及ぶように、カバレッジ領域114内に配置されている。更に、ここでは、ペン92も、カバレッジ領域118内に位置するが、カバレッジ領域114内には位置しないようになっている。
【0083】
最後に、中継ターミナル112は、例えば、センサ104と同様のものである三軸センサ120を備えている。
【0084】
座標変換器122が、ペン92内に設けられている。
【0085】
ターミナル97及び98とペン92は、カバレッジ領域118内にのみ載置されているので、これらのターミナル97及び98とペン92の位置及び向きは、ターミナル112にゼロ自由度で固定された座標系X´Y´Z´(図3には、X´及びY´方向のみを示す)内で表現される。しかしながら、ターミナル112はセンサ120を備えているので、ターミナル96に対するターミナル112の位置及び向きが計測される。これらの計測を用いて、変換器122は、座標系X´Y´Z´内で表現されたペン92のx´、y´、z´座標を、座標系XYZ内で表現されたx、y、z座標に変換する。中継ターミナル112の位置及び向きは、座標系XYZ内で既知である。この時点以降、装置10の動作は、装置90の動作と同様である。
【0086】
図5は、エッチング装置140を示す。エッチング装置140は、飛散した破片からの保護のためのテーブル142を更に備えている点を除いて、装置90と同様のものである。テーブル142は、このために、ペン92により放射されるレーザー光線を透過する窓144を備えている。窓144は、例えば、セレン化亜鉛(ZnSe)から形成されている。本実施例における窓144は、エッチング領域10全域をカバーしている。窓144は、例えば、矩形である。窓144は、ペン92と基板4との間に置かれる。よって、地点Pのエッチングが破片の飛散を引き起こした場合、この破片は、操作者の手に達する前に、窓144により遮断される。
【0087】
テーブル140は、基板4の上方に窓144を保持するための複数の脚を備えている。テーブル140は、各々が窓144の頂点に配置された4本の脚146〜149を備えている。これらの脚は、基板4上に直接載置されている。
【0088】
基準ターミナル96〜99は、それぞれ、脚146〜149にゼロ自由度で固定されている。例えば、ターミナルは、脚146〜149に内蔵されている。よって、4つの基準ターミナル及び窓144は、操作者により、単一の操作で配置される。
【0089】
望ましくは、基準ターミナルは、脚146〜149の自由端に位置し、図3の実施形態におけるように、基板4上に直接載置される。しかしながら、そうでない場合には、基準ターミナルは、既知の高さhbで基板の上方に配置される。この高さhbは、エッチング地点Pの座標を決定するときに考慮される。この違いを除けば、装置140は、装置40と同様に動作する。
【0090】
他にも、多くの実施形態が可能である。特に、レーザーエッチング以外の種類のエッチングも可能である。例えば、エッチングヘッド12は、研磨材料の粒子を噴射することにより、エッチングを行うことができるエッチングヘッドに置き換えられ得る。「研磨材料の粒子」という表現は、基板上に噴射されることを意図され、研磨により基板から材料を削り取ることができる材料で形成された粒子を意味するものである。研磨材料の粒子は、粒子寸法が100μmより小さなコランダム砂、250μmより小さな直径を有するセラミック球、破砕ガラス、金属削り屑等である。エッチングが発射物を噴射することにより実行される場合、ユニットは、望ましくは、それより上方では、エッチングが停止される最大閾値S3に対して計測された高さhを有している。この閾値S3を超えると、エッチングは自動的に禁止される。
【0091】
エッチング装置は、必ずしも持ち運び可能ではない。例えば、レーザー放射源は、ペンの外側に位置し得る。この場合、ペンは、光ファイバーによりレーザー放射源に接続される。この実施形態では、特に、より大出力の放射源を用いることができる。例えば、ビームの出力は、10W又は50Wよりも大きい。
【0092】
脆弱な材料をエッチングするため、より小さい出力の放射源も、また、用いられ得る。例えば、ビームの出力は、0.2W以上である。
【0093】
基準ターミナルを利用するユニット以外の計測ユニットも用いられ得る。例えば、ペンは、基板上の既知の開始地点から、その加速度を計測することにより、場所が特定され得る。
【0094】
基板は、任意の形状及び寸法を有し得る。基板は、鉛直方向に対して如何なる角度で傾いていてもよく、如何なる特性の材料から形成されていてもよい。例えば、基板は、紙から作られてもよく、ガラス板、壁、天井、塗装等であり得る。エッチングヘッドのみが、基板の材料の特性に適合するように変更される可能性がある。
【0095】
基板が鉛直方向に対して傾いている場合、基準ターミナルは、望ましくは、基板に固定されるための手段を備えている。例えば、基板と接触することを意図されたターミナルの平坦面は、ターミナルを手動で基板に接合し、その後に基板から切り離すことを可能とする接着剤により被覆されている。
【0096】
エッチング領域が、エッチングヘッドの位置及び向きを計測するために必要な信号の範囲よりも広い場合、中継ターミナルを用いるよりはむしろ、基準ターミナルが、より大きな出力及び範囲を有する信号を放射できる基準ターミナルに置き換えられ得る。
【0097】
基準ターミナルの数は、4個よりも多くてもよい。例えば、4個以上の基準ターミナルを用いることは、例えば五角形のエッチング領域のような、4つよりも多い頂点を有するエッチング領域を簡単に画定することを可能とする。
【0098】
また、基準ターミナルの数は、4個より少なくてもよい。例えば、簡略化された形態では、1つだけの基準ターミナルが必要である。例えば、図3に示す実施形態では、装置90のターミナル97〜99は取り除かれる。しかしながら、この場合、ストレッチ係数は、2個の基準ターミナル間の距離の関数ではなくなる。したがって、エッチング領域の差渦は、一定であるか、一貫してパターンのサイズと等しくされるか、パターンのサイズを用いて推定し得るものである。
【0099】
変形例において、基準ターミナルをパターンの図面のピクセルに関連付ける所定の関係は、少なくとも1つの第1の基準ターミナルについてのみ予め記憶され、少なくとも1つの第2の基準ターミナルについては予め記憶されない。例えば、1個のみの基準ターミナルが存在する。次に、第1の基準ターミナルに対する第2の基準ターミナルの計測された位置と、第1の基準ターミナルをパターンの図面のピクセルに関連付ける所定の関係とに基づいて、第2の基準ターミナルについての所定の関係が確定される。
【0100】
基準ターミナルは、必ずしもパターンの頂点に対応しない。例えば、変形例として、基準ターミナルの各々は、パターンの頂点ではない所定の地点に関連付けられる。特に、基準ターミナルの1つは、パターンの中央に関連付けられている一方、他の点は、パターンの上端辺の中間点に関連付けられている。
【0101】
基準ターミナルは、基板の一方の側に配置することができ、ペンは、他の側に配置することができ得る。
【0102】
上記の図面に関連して記載した様々な構成要素は、ペンとターミナルの間で、変更し得る。例えば、変形例において、制御ユニットとメモリを、ターミナルに内蔵しうる。一般に、ここで記載されたペンの構成要素により成し遂げられる全ての機能は、ペンとターミナルの間で、異なった分配とすることができる。
【0103】
エッチングされるべきパターンの図面が記憶されたメモリは、また、必ずしもペン又はターミナルの1つの内に配置されるものではない。例えば、メモリは、インターフェース18を介してペン8と通信し得るコンピュータ内に配置し得る。この場合、ペンは、エッチングされるべきパターンの図面に関する情報を、その情報を必要とするときにのみ、要求することができる。
【0104】
また、磁界源は、ターミナル内ではなく、ペン内に配置されるようにすることも可能である。又は、同時に使用される複数の磁界源が、少なくとも1つがターミナル内に配置され、少なくとも1つがペン内に配置されるようにすることも可能である。
【0105】
変形例において、磁界源116及びセンサ120は、巻軸が同一直線上にない3個のコイルからなる単一かつ同一の三軸組み合わせ体を用いて作られる。この場合、三軸組み合わせ体は、磁界源モードとセンサモードで切り換えられる。三軸組み合わせ体のコイルは、磁界源モードに切り換えられたたとき、磁場を生成するように電力供給される。磁界源モードにおいては、三軸組み合わせ体は、上述の三軸磁界源の1つと同様のものである。センサモードにおいては、コイルには電力供給されない。その結果、コイルを通る周辺の磁束が電流を誘起し、この電流が周辺の磁界の計測を可能とする。センサモードにおいては、三軸組み合わせ体は、上述の三軸センサの1つと同様のものである。
【0106】
超広帯域幅波以外の種類の波も用いることができる。例えば、音波も用いることができる。
【0107】
ストレッチファクターは、例えば2つの基準ターミナルを互いに隔てる距離のみを用いて決定される。典型的には、この場合、ターミナルは、エッチングされるべきパターンの対角線を画定するために用いられ、望ましくは、この対角線の両端に配置される。
【0108】
他の変形例では、ストレッチファクターの計算は、省略される。この場合、エッチング領域の大きさは、一定であるか、メモリ16に記憶されているパターンの図面のサイズを用いて確定される。
【0109】
ペンの向きは、また、四元数により表わすことができる。
【0110】
各磁界源が、特有の周波数シグネチャを持つ周期的磁場を継続的に生成する場合、送信機/受信機30、32を用いて、磁界源102とセンサ94及び104を同期させる必要はない。その代りに、同期検波が用いる。
【0111】
また、エッチング方法は、変更することができる。例えば、エッチング方法は、自動的に停止されないようにすることもできる。この場合、基板4のエッチングは、自動的にではなく、操作者によって停止される。
【0112】
上記の工程72及びステップ74の様々な実施形態は、エッチング装置の如何なる実施形態とも組み合わせることができる。
【0113】
ステップ77は、エッチング領域内の所与の地点が、その地点上のペンの連続的通過でエッチングされることを可能とするように修正することができる。例えば、ステップ77において、エッチングされるピクセルに伴う情報が変更される。
【0114】
ステップ62は、エッチングが自動的に停止されるかを決定するために、他の規準が用いられるように修正することができる。例えば、簡略化された変形例では、閾値S1とS2との比較は省略される。
【0115】
他の変形例では、高さhが閾値S1を下回ったら、ペン8が基板4に近づき過ぎていることを操作者に知らせるように、例えば音声信号による警報が自動的に発動される。
【0116】
ステップ68においては、エッチングヘッドは、軸A1の向き及び/又はヘッドと基板間の距離hの関数として制御される。反対に、計測された向き又は距離hの関数としてのエッチングヘッドの制御は省略し得る。
【0117】
テーブル140は、エッチング装置の他の全ての実施形態に組み込むことができる。例えば、装置2に組み込まれる場合、ターミナル20〜23は、ターミナル96〜99に置き換えられる。
【0118】
テーブル140は、4本ではない複数の脚を備えている。しかしながら、少なくとも3本の脚を備えていることが望ましい。各脚の端部は、例えば吸盤等の基板への固定のための機構を備えていることができる。これにより、テーブル140は、基板が傾いていても、鉛直であっても、基板に載置することができる。
【0119】
他の変形例において、装置2は、同一のエッチング領域内の同一のパターンを同時にエッチングするために、複数のペンを備えることができる。これにより、複数の操作者が、同一のエッチング領域内の同一のパターンを、同時にエッチング作業することが可能となる。各ペンによりエッチングされる同一のパターンの様々な部分が、完全に並列するために要求されることは、これらのペンの各々の位置が、基準ターミナルに結合された同一の座標系内で計測されることが全てである。
【0120】
独立請求項における特徴は、パターンのエッチングを自動的に停止することを可能とする特徴とは独立して実施することができる。特に、中継ターミナルは、特定の地点Pにおけるパターンのエッチングを停止するという特徴を実施することなしに、用いることができる。
【符号の説明】
【0121】
2 パターンをエッチングするための装置
4 基板
8 ペン
10 エッチング領域
12 エッチングヘッド
14 制御ユニット
16 メモリ
18 インターフェース
20〜23 基準ターミナル
34 加速度計
36 磁力計
40 磁力計
90 エッチング装置
92 ペン
94 三軸磁界センサ
96〜99 基準ターミナル
102 三軸磁界源
110 エッチング装置
112 中継ターミナル
122 変換器
140 エッチング装置
142 テーブル
144 窓
146〜149 脚
【技術分野】
【0001】
本発明は、基板材料上に配置されたエッチング領域内にパターンをエッチングするための装置及び方法に関する。また、本発明は、このエッチング方法を行うためのデータ記憶媒体、ペン及びターミナルにも関する。
【0002】
「エッチング」という用語は、基板に孔を掘る行為を意味する。孔は、通し孔であっても、なくてもよい。互いに隣接する通し孔を設けることにより、基板を切断することができる。めくら孔の形成により、パターンを基板内で浮き彫り状にエッチングすることができる。
【0003】
本発明は、「非接触」エッチング装置、すなわち、エッチングヘッドがエッチングされる基板と直接的な機械的接触をすることのない装置に関する。
【背景技術】
【0004】
エッチング装置は、エッチング領域に対して、手で自由に動かすことができる少なくとも1本のペンを備えている。ペンは、エッチングが開始されたとき、エッチング地点において基板をエッチングすることができるエッチングヘッドを備えている。
【0005】
このような装置は、例えば、特許文献1(米国特許4,564.736号明細書)その他に開示されている。この公知の装置において、エッチングヘッドは、操作者によって自由に動かされる。従って、この装置では、エッチングされるべき基板上での動きが制約されることは、ほとんどない。基板は、如何なるサイズのものであってもよいし、如何なる角度で傾いていてもよい。したがって、この装置は、構造物の壁、天井又は床、プレートから、その他に至るまで、板上に様々なパターンをエッチングするために用いることができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第4564736号
【特許文献2】独国特許出願第102004054940号
【特許文献3】独国特許出願第3906336号
【特許文献4】米国特許第5436027号
【特許文献5】仏国特許出願第2831258号
【特許文献6】独国特許出願第4429751号
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、これらの公知の装置において、基板内のパターン再生の正確性は、操作者の技量に大きく依存している。これは、ペンを管理してエッチングを開始するのは、操作者のみであるからである。
【0008】
更に、破片が飛び散るのを防止するため、操作者は、ペンを基板から遠ざける傾向がある。しかしながら、ペンが基板から遠くなればなるほど、正確にエッチングすることは難しくなる。したがって、ペンと基板の距離をできるだけ遠くすることが要求される安全性と、ペンを基板にできるだけ近づけることが要求される正確性との間で、妥協が存在することになる。
【課題を解決するための手段】
【0009】
本発明は、上記問題点の少なくとも1つを解決することを目的としている。本発明の1つの主題は、エッチング装置において、
−基板に対するエッチングヘッドの位置及び向きを計測するユニットと、
−制御ユニットであって、
・エッチングヘッドの計測された位置及び向きの関数として、エッチング地点の座標を計算し、
エッチング地点について計算された座標が、予め記憶されたパターンの図面において符号化されているエッチングされるべき地点の座標と一致した場合、エッチング地点におけるエッチングを開始し、一致しない場合には、エッチングを自動的に停止する制御ユニットを備えている。
【0010】
上記の装置では、エッチングされる地点の座標に一致するエッチング地点のみが、エッチングされる。そのため、基板上にエッチングされるべきパターンの再生の正確性は、操作者の技量に依存することはなくなる。
【0011】
さらに、不正確な地点へのエッチングは、ペンを基板から隔てる距離とは無関係に防止される。よって、操作者は、パターンのエッチングにおける正確性に影響を与えることなく、ペンを基板から安全な距離に保持することができる。
【0012】
さらに、ペンは基板に対して手動で自由に動かせるままであるので、非常に幅広い種類の基板にエッチングを行うことができる。
【0013】
上記のエッチング装置の実施形態においては、以下の特徴の少なくとも1つを備えることができる。
■装置は、少なくとも1つの取り外し可能な基準ターミナルを備え、基準ターミナルは、手動で基板上に配置することができ、基板上における基準ターミナルの位置に依存しない所定の関係により、エッチングされるべきパターンの対応する地点に関連付けられており、計測ユニットは、基準ターミナルに対するエッチングヘッドの位置及び向きを計測可能であり、制御ユニットは、計算されたエッチング地点の座標と、パターンの地点と基準ターミナルを関連付ける所定の関係の関数としてのエッチングされるべき地点の座標との一致又は不一致を選択的に確定するようになっている。
■装置は、
−少なくとも2個の基準ターミナルを備え;
−計測ユニットは、これら2個の基準ターミナル間の距離を計測可能であり、
−制御ユニットは、計算されたエッチング地点の座標と、計測された2個の基準ターミナル間の距離の関数としてのエッチングされるべき地点の座標との一致又は不一致を選択的に確定し、この距離に比例して、パターンを拡大又は縮小する。
■装置は、基準ターミナルとは独立に手動で配置され得る少なくとも1つの中継ターミナルを備え、この中継ターミナルは、基板に対するその位置に依存しない所定の関係により、パターンの地点と関連付けられてはおらず、計測ユニットは、更に、
−中継ターミナルの座標系におけるエッチングヘッドの位置及び向きを検出するセンサと、
−基準ターミナルに対する中継ターミナルの位置及び向きを検出するセンサと、
−中継ターミナルの座標系において計測されたエッチングヘッドの位置及び向きを、基準ターミナルに対する位置及び向きに変換する変換器とを備えている。
■エッチングヘッドは、エッチング地点をエッチングするレーザー光線を放射可能である。
■装置は、テーブルを備え、テーブルは、エッチングにより飛散する破片に対する保護のための窓と、基板への載置のための脚とを備え、少なくとも1つの基準ターミナルが、このテーブルに対して自由度無しで固定されている。
■エッチングヘッドは、エッチング地点をエッチングする研磨材料からなる粒子を噴射可能である。
【0014】
本装置のこれらの実施形態は、更に、以下のような利点を有する:
−予め記憶された図面のエッチングされるべき個処に関連付けられた基準ターミナルを用いることにより、パターンを基板上に簡単に配置することができる。
−中継ターミナルを用いることにより、ペンの位置を計測するために用いられる信号の出力を増大させることなく、エッチング領域の大きさを増大させることができる。
−上記のテーブルを用いることにより、単一の操作で、基準ターミナルと保護窓を配置することができる。
【0015】
本発明の他の主題は、基板材料上に配置されたエッチング領域内にパターンをエッチングする方法において、
−エッチングが開始されたときに、エッチング地点において基板のエッチングを行い得るエッチングヘッドを備えるペンを、手動でエッチング領域上に自由に動かす工程と、
−基板に対するエッチングヘッドの位置及び向きを計測する工程と、
−計測されたエッチングヘッドの位置及び向きの関数として、エッチング地点の座標を計算する工程と、
−エッチング地点について計算された座標が、予め記憶されたパターンの図面において符号化されているエッチングされるべき地点の座標と一致する場合、エッチング地点におけるエッチングを開始させ、一致しない場合、エッチングを自動的に中止させる工程と
を備えている。
【0016】
本発明のエッチング方法の実施形態は、以下の特徴の少なくとも1つを備えていてもよい。
a)エッチングの開始により既にエッチングがなされたパターンの各地点をメモリに記憶する工程と、
b)既にエッチングがなされた地点のエッチングを禁止する工程と、
c)1つの地点のエッチングを、エッチングの開始後、所定時間後に自動的に停止する工程。
■工程a)〜c)は、予め記憶された図面の各層について繰り返され、予め記憶された図面は、少なくとも2つの層を備え、各層は、対応する基板の層におけるエッチングされるべき地点の座標で符号化されている。
■方法は、
−所与のエッチング地点をエッチングするために費やされた累積時間をカウントする工程と、
−カウントされたエッチング時間が所定の閾値を超えた場合、そのエッチング地点における更なるエッチングを禁止し、超えていない場合、その地点における更なるエッチングを許容する工程と
を備えている。
■本発明の方法は、計測されたエッチングヘッドの位置及び向きを用いて、ペンを基板から隔てる距離を決定する工程と、この距離が所定の閾値よりも小さい場合、基板へのパターンのエッチングを禁止するか、又は警報を発する工程とを備えている。
【0017】
本方法のこれらの実施形態は、更に、以下のような利点を有している。
−所定時間後にエッチングを自動的に停止することにより、エッチング深さを制御することができる。
−予め記憶された図面の各層の地点のエッチングを自動的に停止することにより、浮彫りで彫刻模様を作成することができる。
−距離hを計測することにより、操作者がエッチングヘッドを基板から安全な距離に保つことが容易となり、本方法における安全性は向上する。
【0018】
本発明の他の主題は、電子処理装置で実行される、上記のエッチング方法を行うための命令を備えるデータ記憶媒体である。
【0019】
本発明の他の主題は、上記のエッチング方法で用いられるペンであり、このペンは、エッチング領域の上方で、手により動かし得るエッチングヘッドと、基板に対するエッチングヘッドの位置を計測可能な計測ユニットの少なくとも幾つかの構成要素とを備えている。
【0020】
本発明は、添付図面を参考にして、限定を与えるものではない例として示す以下の説明を読むことで、より理解しうると思う。
図面において、同一の構成要素には、同一の符号を付してある。
【図面の簡単な説明】
【0021】
【図1】エッチング装置の第1の実施形態を示す概略斜視図である。
【図2】図1の装置で用いられるエッチング方法を示すフローチャートである。
【図3】エッチング装置の第2の実施形態を示す概略斜視図である。
【図4】持ち運び可能なエッチング装置の第3の実施形態を示す概略平面図である。
【図5】エッチング装置の第3の実施形態を示す概略斜視図である。
【発明を実施するための形態】
【0022】
以下の記述では、本技術分野の当業者に公知の特徴及び機能については、詳細に説明することはしない。
【0023】
図1は、水平な物理基板にパターンをエッチングするための装置2を示す。
【0024】
ここで、「パターン」という用語は、基板4上でエッチングされ得る任意の種類のパターンを意味する。このパターンは、写真、テキスト、幾何学パターン、又は型模様等である。
【0025】
基板4は、平坦で水平な上面を有している。基板4は、エッチングされ得る材料から作られている。この材料は、例えば、金属、プラスチック、ガラス、木、紙、革等である。
【0026】
実施形態において、装置2は、持ち運び可能、すなわち、持ち上げ用手段を必要とせずに、人により直接搬送され得るものである。具体的には、装置2の構成要素の重量は、典型的には10kgよりも軽く、望ましくは5kg又は1kgよりも軽い。本装置を容易に搬送するため、装置2の全ての構成要素の体積は、典型的には0.15m3よりも小さく、望ましくは、10-3m3又は10-4m3よりも小さい。
【0027】
装置2は、エッチング領域10の全域にわたって、操作者により手で動かし得るペン8を備えている。エッチング領域10は、基板の上面に設けられ、パターンは、エッチング領域10の内部にエッチングされる。ペン8は、ゼロでない閾値S1よりも大きな高さhだけ、基板4から離間しており、そのため、ペンが基板に直接接触しないようになっている。
【0028】
この実施形態において、エッチング領域10は、幅Lと長さLgを有する矩形である。
【0029】
ペン8は、ほぼ長手方向軸A1に沿って延びている。ペン8の寸法は、操作者の手によって容易に操作できるように選択される。例えば、ペンの長さは、20cmよりも短く、幅は、5cmよりも小さい。ペン8の重量は、典型的には1kgよりも軽く、望ましくは200gよりも軽い。
【0030】
ペン8は、基板4をエッチングするために必要な全ての要素を備えたエッチングヘッド12を備えている。例えば、本実施形態において、ヘッド12は、レーザー光線源を備えている。例えば、光線源は、波長808nmで出力2Wの放射をするレーザーダイオードである。したがって、ヘッド12は、エッチング地点において、基板4をエッチングすることのできるレーザー光線を放射する。地点Pは、照準線と基板の交点上に位置している。ここで、照準は、軸A1と一致している。
【0031】
ペン8は、更に、
−エッチングヘッド12を制御するユニット14と、
−基板4上にエッチングされるべきパターンの図面を記憶したメモリ16と、
−インターフェース18と、
−ペンを動作させるのに必要な、電池等のエネルギー源(図示せず)とを備えている。
【0032】
ユニット14は、メモリ16に接続されている。メモリ16に記憶された図面は、パターンを形成するために、エッチングされるべき各地点の座標を符号化している。より正確には、本実施形態において、図面は、所定の順序で積み重ねられた複数の層に分割されている。各層は、エッチングされるべきパターンの断面、及びエッチング深さに対応している。基板に垂直な方向に積み重ねられた層は、エッチングされるべき3次元パターンを形作っている。一例として、各層は、ビットマップ(bmp)形式で記憶されている。よって、各層は、地点の行列から形成され、各地点において、列は、その座標に加えて、この地点がエッチングされるか否かを示している。ビットマップ列の地点がイメージを符号化するのに例えて、以下の説明では、列の地点をピクセルと言う。本実施形態では、図面は矩形をしている。
【0033】
制御ユニット14は、データ記憶媒体に記憶されている命令を実行できるプログラム可能な電子処理装置である。具体的には、メモリ16は、図2の方法を実行するために必要な命令を含んでいる。これらの命令は、ユニット14により実行される。
【0034】
インターフェース18により、ペン8は、エッチングされるべきパターンの図面をメモリ16内に記憶するために、コンピュータに接続される。
【0035】
装置2は、更に、基板4上に手動で配置され得る移動可能な基準ターミナルを備えている。一例として、本実施形態においては、本装置は、4個の基準ターミナル20〜23を備えている。
【0036】
ターミナル20〜23は、既存の基板4に加えられる。したがって、これらは、基板4と機械的に独立なものである。これらは、操作者により、自由に、基板4上に配置され得る。本実施形態において、ターミナルは、基板4上に載置され、基板上の所定の位置に重力によってのみ保持されている。
【0037】
各基準ターミナルは、基板上でのターミナルの位置に依存しない所定の関係により、エッチングされるべきパターンの地点と関連付けられている。この所定の関係は、例えば、メモリ16内に記憶されている。本実施形態において、この所定の関係は、ターミナル20〜23の各々が、矩形図面の頂点に対応することを示している。したがって、これらのターミナルは、エッチング領域10の境界を画定している。
【0038】
装置2は、基準ターミナル20〜23に対するエッチングヘッドの位置及び向きを計測するための装置を備えている。この装置は、エッチングヘッドの6個の自由度を計測する。具体的に、エッチングヘッドの位置及び向きは、それぞれ、ターミナルに対して自由度無しで固定された直交座標系XYZ内で表現された3つの座標の2つの組x、y、z及びθx、θy、θzにより与えられる。ここで、座標系XYZのX及びY方向は、基板4の上面に対して平行であり、Z方向は垂直である。角度θx、θy、θzは、それぞれ、軸A1がX、Y及びZ方向となす角度である。
【0039】
エッチングヘッド12の位置を決定するため、本実施形態では、ペン8及びターミナル20〜23は、それぞれ、電磁波送信機/受信機30及び32を備えている。例えば、送信機/受信機30及び32は、超広帯域幅(UWB)送信機/受信機である。これらの送信機/受信機の各々は、送信機/受信機間の電磁波の伝播時間の計測を可能とするために、電磁波の送信及び受信の瞬間を計測することができるクロックを備えている。
【0040】
更に、ユニット14は、プロセッサー33及びクロック31を備えている。プロセッサー33は、計測された伝播時間に基づいて、ペン8と各ターミナル20〜23との距離を決定する。
【0041】
エッチングヘッドの向きは、ここでは、エッチングヘッドに沿った軸A1の向きにより表される。したがって、エッチングヘッド12の向きは、角度θx、θy及びθzを計測することにより計測される。このため計測装置は、更に、
−ペン8に対して自由度無しで固定された加速度計34及び磁力計36と、
−ターミナル20〜23の各々に対して自由度無しで固定された加速度計38及び磁力計40とを備えている。
【0042】
例えば、加速度計34と磁力計36は、ペン8に内蔵されている。加速度計38と磁力計40は、ターミナル20〜23の各々に内蔵されている。
【0043】
加速度計34は、軸A1が地球の重力場の局所的方向により表される鉛直方向となす角度を計測する。磁力計36は、軸A1が地球の磁場のN極となす角度を計測する。
【0044】
望ましくは、加速度計34及び磁力計36は、軸A1の向きの計測における正確性を増すために、ペン8のエッチングヘッド12から最も遠い部分に配置されている。
【0045】
加速度計38は、基準ターミナルと整列した軸A2が鉛直方向となす角度を計測する。磁力計40は、軸A2が磁北となす角度を計測する。このため、磁力計40及び磁力計36は、三軸磁力計である。
【0046】
軸A2の向きは、基板4の上面の向きを表さなければならない。このため、ここでは、各基準ターミナルは、基板4上に配置されたときに、軸A2が基板4の上面に対して必ず垂直となるように設計されている。例えば、各基準ターミナルは、軸A2に垂直な少なくとも1つの平坦面を備えており、基板4の上面に直接支持されるようになっている。望ましくは、各基準ターミナルは、最大で2つの平坦面を備えており、ターミナルの他の面は凹状となっている。この実施形態において、各ターミナルは、円柱形をしており、軸A2は、円柱の回転中心軸となっている。
【0047】
次に、図2の方法と関連して、装置2の作用について、より詳細に説明する。
【0048】
最初に、ステップ50において、エッチングされるべきパターンの図面が、メモリ16内に記憶される。このために、例えば、ペン8が、インターフェース8を介してコンピュータと接続される。
【0049】
次に、ステップ52において、ターミナル20〜23が、手動で基板4上に配置される。本実施形態において、これらは、エッチング領域の頂点を画定するように配置される。
【0050】
ステップ54において、ペン8に電圧が印加され、その結果、ペン8がエッチング領域10に近づくように移動する。その後、記憶された図面のワーキングコピーがまだ存在していない場合、ワーキングコピーがメモリ16内で自動的に作成される。
【0051】
このようにして、ステップ56においては、ターミナル20〜23に対するエッチングヘッド12の位置が計測される。このため、プロセッサー33は、送信機/受信機20によって送信された電磁波が、ターミナル20〜23まで伝播するために要する時間を計測する。これらの伝播時間は、その後、エッチングヘッド12をターミナル20〜23の各々から隔てる距離を決定するために、装置14によって用いられる。同様に、ステップ56においては、ターミナル20〜23をお互いから隔てる距離が計測される。これらの異なる伝播時間を用いて、ユニット14は、座標系XYZにおけるエッチングヘッド12の座標x、y及びzを、三角測量を用いて決定する。
【0052】
並行して、ステップ58においては、また、X、Y及びZ方向に対する軸A1の向きが計測される。このために、加速度計34及び磁力計36は、それぞれ、鉛直方向及び磁北に対する軸A1の向きを計測する。同時に、ターミナル20〜23の各々の加速度計38及び磁力計40は、それぞれ、鉛直方向及び磁北に対する軸A2の向きを計測する。これらの計測値は、その後、ユニット14に送られ、ユニット14は、これらを組み合わせて、座標系XYZにおける軸A1の角座標θx、θy及びθzを得る。
【0053】
計測されたペン8の位置及び向きを用いることにより、ステップ60において、ユニット14は、エッチングヘッド12を基板4から隔てる垂直距離h(図1参照)と、軸A1と鉛直方向Z間の角度θzを決定する。
【0054】
ステップ62において、ユニット14は、その内部でエッチングが可能である錐体の中に、ペン8が位置しているかを確認する。この錐体は、基板4の平面に対して略垂直に置かれている。このために、距離h及び角度θzの絶対値が、それぞれ、所定の閾値S1及びS2と比較される。距離hが閾値S1よりも小さいか、又は角度θzの絶対値が閾値S2よりも小さければ、ステップ64において、基板のエッチングは自動的に禁止される。このように、閾値S1及びS2は、その内部でエッチングが可能である錐体を定める。ペンがこの錐体の内部にない場合、すなわち、ペンが基板に近すぎるか、又は基板に対して傾きすぎている場合、エッチングは、正確に又は最適な安全条件のもとで実行し得ないので、禁止される。例えば、閾値S1は、操作者が飛散した破片により傷つけられることを防止するために考慮されなければならない安全距離に対応している。
【0055】
これが当てはまらない場合には、ステップ66に進み、基板4上におけるエッチング地点P(図1)の座標を計算する。地点Pの座標は、計測されたエッチングヘッドの座標x、y、z及びθz、θy、θzから得られる。例えば、地点Pの座標は、軸A1とエッチング領域10との交点の座標を計算することにより得られる。
【0056】
次に、ステップ68において、ユニット14は、地点Pの座標が、予めメモリ16内に記憶された図面のワーキングコピー内で符号化されている地点の座標に一致するか否かを判定する。このため、各基準ターミナルのパターンの地点に対する所定の関係が用いられる。
【0057】
例えば、これがまだ行われていない場合、工程70において、ユニット14は、ペン8に対する異なるターミナル20〜23の位置、及び計測されたターミナル20〜23間の距離に基づいて、エッチング領域10の寸法を計算する。次に、この工程70において、ユニット14は、座標系XYZ内で表された地点Pの座標を、エッチングされるべきパターンの図面のピクセルに対応する座標に変換するためのストレッチファクターを計算する。例えば、それぞれX及びY方向の2つのストレッチファクターCx及びCyが以下の計算式を用いて計算される:
Cx=(Limg/L)
Cy=(Lgimg/Lg)
ここで、Limg及びLgimgは、それぞれ、エッチングされるべきパターンの図面の幅及び長さである。
【0058】
したがって、ターミナル間の距離は、エッチングされるべきパターンの寸法を定める。換言すると、基準ターミナルが互いに離れるほど、エッチングされるべきパターンは大きくなる。反対に、基準ターミナルが互いに近づくほど、エッチングされるべきパターンは縮小される。この実施形態では、いずれの場合でも、エッチングされるべきパターンは、エッチング領域の全体を占めている。
【0059】
この本実施形態の場合、エッチング領域およびエッチングされるべきパターンは矩形であるので、ストレッチファクターCx及びCyは、地点Pのx、y座標によらずに、一定である。
【0060】
しかしながら、エッチング領域およびエッチングされるべきパターンが同一形状を有していなければ(例えば、仕切られたエッチング領域が台形であり、エッチングされる領域が矩形であれば)、パターンがエッチング領域全体を満たすものとなるように、ストレッチファクターCx及びCyは、地点Pの座標x、yの関数として変化する。
【0061】
ストレッチファクターCx、Cyが確定されたら、工程72において、これらは、地点Pの座標x及びyに対応する図面のピクセルの座標を見出すために用いられる。例えば、座標x及びyは、対応するピクセルの座標xp及びypを得るために、それぞれ、単純にストレッチファクターCx及びCyと掛け合わされる。対応するピクセルが見出されたら、図面のワーキングコピーを含むファイルが、そのピクセルがエッチングされるべきピクセルであるか否かを示している。このため、ユニット14は、図面の層の各々の座標xp及びypのピクセルと関連するデータ項目全体の探索を行う。これらのデータ項目の1つが、そのピクセルがエッチングされるべきものであることを示していれば、そのピクセルは、エッチングされるべきピクセルに相当する。
【0062】
見出されたピクセルがエッチングされるべきピクセルであれば、ステップ74において、ユニット14は、エッチングヘッドが自動的にそのピクセルのエッチングを開始するための信号を送信する。エッチングが開始された後、所定時間Δ後に、エッチングは自動的に終了する。よって、パルス幅Δのレーザーパルスが生成される。時間Δは、短いもので、典型的には、0.1s又は10μsよりも小さい。本実施形態では、エッチングが開始された後、時間Δは、クロック31によりカウントされる。既知のパルス幅のレーザーパルスが生成されるという事実は、この地点Pにおいてペンの各通過により掘られる穴の深さの制御を可能とする。このステップでは、望ましくは、基板上に投射されるレーザー光線の強度は、計測されたペン12の向きの関数として変化する。例えば、強度は、レーザー光線の出力を調整することにより変更される。
【0063】
対応するピクセルが、エッチングされるべきピクセルでない場合、地点Pにおけるエッチングは自動的に禁止される。そのため、ステップ74は実行されず、処理は、ステップ80に直ちに移行する。
【0064】
ステップ74の後、ステップ77において、エッチングされたピクセルの座標は、メモリに記憶される。ここで記載されている実施形態において、ユニット14は、図面のワーキングコピーにおいて、座標xp及びypがエッチングされるべきことを示すデータ項目と関連付けられていたワーキングコピーの層を修正する。より具体的には、この修正は、そのデータ項目を、その層のそのピクセルがエッチングされるべきでものでないことを示すデータ項目と置き換えることを含む。よって、ペンがもう一度、同一地点上を動いた場合、図面のワーキングコピーにおいて、座標xp及びxyのピクセルがエッチングされるべきことを示すデータ項目と関連付けられている層がまだ存在する場合にのみ、その地点が再びエッチングされることになる。そうでない場合には、このピクセルは再びエッチングされることはない。したがって、各地点Pにおけるエッチング深さを制御することが可能となる。
【0065】
ステップ77において、ユニット14は、更に、図面のエッチングされるべき全てのピクセルが、既にエッチングされたか否かを確認する。例えば、この確認は、エッチングされるべきピクセルがまだ存在するかを決定するために、画像のワーキングコピーのピクセルをスキャンすることにより行われる。
【0066】
全てのピクセルが既にエッチングされていたら、処理はステップ78に進み、エッチング方法は自動的に停止する。その後、ペンは、動作停止し、基準ターミナル20〜23は、基板4から取り除かれる。基板4内へのパターンのエッチングは終了する。
【0067】
そうでない場合には、ステップ80において、操作者は、まだエッチングされていないエッチング領域10の部分に向けて、ペンを手動で動かす。このステップ80の後、エッチングされるべきパターンの全てのピクセルが、基板4内にエッチングされてしまわない限り、ステップ56〜80が繰り返される。
【0068】
図3は、エッチング装置90を示す。エッチング装置90は、エッチングヘッド12の位置及び向きを計測するための異なるユニットを有している点を除いて、装置2と同様のものである。より正確には、本実施形態における計測ユニットは、少なくとも1つの三軸磁界源と、少なくとも1つの三軸磁界センサを用いて作られている。
【0069】
「三軸磁界源」という語は、少なくとも3つの異なる非同一直線方向にある磁場を生成し得る磁界源を意味する。典型的には、これらの磁場の方向は、互いに直角である。例えば、このような磁界源は、互いに直角な3つの巻軸の周りで各々が巻回された3つのコイルを用いて作られる。例えば、各コイルの巻数は、2つの巻軸の交点Oの両側にほぼ等しく分配されている。このような三軸磁界源は、遠方において、点Oを中心とする3つの異なる磁気双極子としてモデル化し得る。点Oから磁界源の最大寸法の3倍〜4倍だけ離れた地点は、遠方にあると考えられる。磁界源の最大寸法は、例えば、コイルの最大長さに等しい。磁界源は、時間内に同時に又は連続して、放射軸の各々に沿った磁界を生成する。
【0070】
「三軸磁界センサ」という語は、互いに同一直線上にない少なくとも3つの計測軸上に投射される磁界を計測可能なセンサを意味する。典型的には、3つの計測軸は、互いに直角である。このような三軸センサは、例えば、コイルが磁界の保護を計測するために用いられ、磁界を生成するために用いられるのではない点を除いて、三軸センサと同様の方法で製造される。
【0071】
図3の実施形態において、ペン8は、それと同様のペン92に置き換えられている。しかしながら、加速度計34及び磁力計36は、三軸磁界センサ94に置き換えられている。このセンサ94は、ペン92に固定されたもので、例えば、ペンに内蔵されている。
【0072】
ターミナル20〜23は、ターミナル96〜99に置き換えられている。ターミナル96〜99は、加速度計38及び磁力計40がターミナル96においては、三軸磁界源102に置き換えられ、ターミナル97〜99においては、三軸磁界源102に置き換えられている点を除いて、ターミナル20〜23と同一のものである。
【0073】
送信機/受信機30及び32は、ペンと基準ターミナル96〜99間の情報交換を可能とするように、そのままとされている。この情報交換は、例えば、磁界源102とセンサ94〜104を同期させるために用いられる。
【0074】
プロセッサー33は、連立方程式を解くことにより、ターミナル96に対する座標系XYZ領域におけるエッチングヘッド12の位置及び向きを、ゼロ自由度で確定する。この連立方程式は、三軸磁界源102と三軸センサ94間の磁気相互作用のモデルを作ることにより得られる。この連立方程式において、エッチングヘッドの座標x、y、z及びθx、θy、θzは、未知数である。このような連立方程式についての更なる情報は、例えば、ヨーロッパ特許出願第1502544号に見出すことができる。読者は、また、フランス特許出願第0953432号を参照することができる。
【0075】
さらに、この実施形態では、予め記憶された図面は、各ピクセルが所定のエッチング時間Δiと関連付けられた単一の層を備えている。ここで、添え字iは、その層のピクセルと関連付けられたものである。
【0076】
装置90の動作は、図2と関連して記載されたものと、以下の点を除いて同様である。
−エッチングヘッドの位置及び向きの計測方法が異なっており、
−ピクセルがエッチングされるべきか否かの判定方法が異なっている。
【0077】
より明確には、工程72において、ユニットは、座標xp及びypのピクセルが、ワーキングコピーにおいて0ではない正の値のエッチング時間Δiと関連付けられている場合に、エッチングされるべきであると判定する。
【0078】
次に、ステップ74において、地点Pにおけるエッチングが、ペンが動かされず、かつクロック31によりカウントされた時間が時間Δiよりも小さい限り、継続される。反対に、地点Pにおけるエッチングは、
a)クロック31によりカウントされた時間が時間Δiに達したら直ちに自動的に、又は
b)操作者が、ペン92を他の地点P上に動かした場合に停止される。
【0079】
これらエッチングが停止される2つの場合において、ユニット14は、時間Δiとクロック31によりカウントされた時間との差を計算する。次に、ステップ74の最後において、ユニットは、この差を、パターンの図面のワーキングコピーにおける座標xp及びypのピクセルと関連付けられた新たな時間Δiとして記録する。したがって、ワーキングコピーにおいて記憶された時間Δiは、地点Pにおける累積エッチング時間に依存している。よって、本方法もまた、各地点Pにおけるエッチング深さを制御することを可能とするものである。
【0080】
図4は、エッチング装置110を示す。エッチング装置110は、例えば、少なくとも1つの中継ターミナルを備えている点を除いて装置90と同一のものである。図4は、簡明のために、中継ターミナルが1つだけ示されている。
【0081】
中継ターミナル112は、エッチングヘッドの位置及び向きを計測するために用いられる信号の出力を少しも増大させることなく、エッチング領域10の大きさを増大させることを可能にする。より正確には、本実施形態において、中継ターミナル96に組み込まれた磁界源102から放出される磁場の有効範囲は、カバレッジ領域112により表される。ここでは、カバレッジ領域112は、ターミナル97及び98を含むほど遠くまでは及んでいないと仮定される。
【0082】
ターミナル112は、他のターミナル及びペン92と情報を交換するために、送信機/受信機32を備えている。ターミナル112は、また、例えば磁界源102と同様の三軸磁界源116を備えている。磁界源116の有効範囲は、カバレッジ領域118で表される。ターミナル112は、それ自身のカバレッジ領域118がターミナル97及び98を含むほど遠くまで及ぶように、カバレッジ領域114内に配置されている。更に、ここでは、ペン92も、カバレッジ領域118内に位置するが、カバレッジ領域114内には位置しないようになっている。
【0083】
最後に、中継ターミナル112は、例えば、センサ104と同様のものである三軸センサ120を備えている。
【0084】
座標変換器122が、ペン92内に設けられている。
【0085】
ターミナル97及び98とペン92は、カバレッジ領域118内にのみ載置されているので、これらのターミナル97及び98とペン92の位置及び向きは、ターミナル112にゼロ自由度で固定された座標系X´Y´Z´(図3には、X´及びY´方向のみを示す)内で表現される。しかしながら、ターミナル112はセンサ120を備えているので、ターミナル96に対するターミナル112の位置及び向きが計測される。これらの計測を用いて、変換器122は、座標系X´Y´Z´内で表現されたペン92のx´、y´、z´座標を、座標系XYZ内で表現されたx、y、z座標に変換する。中継ターミナル112の位置及び向きは、座標系XYZ内で既知である。この時点以降、装置10の動作は、装置90の動作と同様である。
【0086】
図5は、エッチング装置140を示す。エッチング装置140は、飛散した破片からの保護のためのテーブル142を更に備えている点を除いて、装置90と同様のものである。テーブル142は、このために、ペン92により放射されるレーザー光線を透過する窓144を備えている。窓144は、例えば、セレン化亜鉛(ZnSe)から形成されている。本実施例における窓144は、エッチング領域10全域をカバーしている。窓144は、例えば、矩形である。窓144は、ペン92と基板4との間に置かれる。よって、地点Pのエッチングが破片の飛散を引き起こした場合、この破片は、操作者の手に達する前に、窓144により遮断される。
【0087】
テーブル140は、基板4の上方に窓144を保持するための複数の脚を備えている。テーブル140は、各々が窓144の頂点に配置された4本の脚146〜149を備えている。これらの脚は、基板4上に直接載置されている。
【0088】
基準ターミナル96〜99は、それぞれ、脚146〜149にゼロ自由度で固定されている。例えば、ターミナルは、脚146〜149に内蔵されている。よって、4つの基準ターミナル及び窓144は、操作者により、単一の操作で配置される。
【0089】
望ましくは、基準ターミナルは、脚146〜149の自由端に位置し、図3の実施形態におけるように、基板4上に直接載置される。しかしながら、そうでない場合には、基準ターミナルは、既知の高さhbで基板の上方に配置される。この高さhbは、エッチング地点Pの座標を決定するときに考慮される。この違いを除けば、装置140は、装置40と同様に動作する。
【0090】
他にも、多くの実施形態が可能である。特に、レーザーエッチング以外の種類のエッチングも可能である。例えば、エッチングヘッド12は、研磨材料の粒子を噴射することにより、エッチングを行うことができるエッチングヘッドに置き換えられ得る。「研磨材料の粒子」という表現は、基板上に噴射されることを意図され、研磨により基板から材料を削り取ることができる材料で形成された粒子を意味するものである。研磨材料の粒子は、粒子寸法が100μmより小さなコランダム砂、250μmより小さな直径を有するセラミック球、破砕ガラス、金属削り屑等である。エッチングが発射物を噴射することにより実行される場合、ユニットは、望ましくは、それより上方では、エッチングが停止される最大閾値S3に対して計測された高さhを有している。この閾値S3を超えると、エッチングは自動的に禁止される。
【0091】
エッチング装置は、必ずしも持ち運び可能ではない。例えば、レーザー放射源は、ペンの外側に位置し得る。この場合、ペンは、光ファイバーによりレーザー放射源に接続される。この実施形態では、特に、より大出力の放射源を用いることができる。例えば、ビームの出力は、10W又は50Wよりも大きい。
【0092】
脆弱な材料をエッチングするため、より小さい出力の放射源も、また、用いられ得る。例えば、ビームの出力は、0.2W以上である。
【0093】
基準ターミナルを利用するユニット以外の計測ユニットも用いられ得る。例えば、ペンは、基板上の既知の開始地点から、その加速度を計測することにより、場所が特定され得る。
【0094】
基板は、任意の形状及び寸法を有し得る。基板は、鉛直方向に対して如何なる角度で傾いていてもよく、如何なる特性の材料から形成されていてもよい。例えば、基板は、紙から作られてもよく、ガラス板、壁、天井、塗装等であり得る。エッチングヘッドのみが、基板の材料の特性に適合するように変更される可能性がある。
【0095】
基板が鉛直方向に対して傾いている場合、基準ターミナルは、望ましくは、基板に固定されるための手段を備えている。例えば、基板と接触することを意図されたターミナルの平坦面は、ターミナルを手動で基板に接合し、その後に基板から切り離すことを可能とする接着剤により被覆されている。
【0096】
エッチング領域が、エッチングヘッドの位置及び向きを計測するために必要な信号の範囲よりも広い場合、中継ターミナルを用いるよりはむしろ、基準ターミナルが、より大きな出力及び範囲を有する信号を放射できる基準ターミナルに置き換えられ得る。
【0097】
基準ターミナルの数は、4個よりも多くてもよい。例えば、4個以上の基準ターミナルを用いることは、例えば五角形のエッチング領域のような、4つよりも多い頂点を有するエッチング領域を簡単に画定することを可能とする。
【0098】
また、基準ターミナルの数は、4個より少なくてもよい。例えば、簡略化された形態では、1つだけの基準ターミナルが必要である。例えば、図3に示す実施形態では、装置90のターミナル97〜99は取り除かれる。しかしながら、この場合、ストレッチ係数は、2個の基準ターミナル間の距離の関数ではなくなる。したがって、エッチング領域の差渦は、一定であるか、一貫してパターンのサイズと等しくされるか、パターンのサイズを用いて推定し得るものである。
【0099】
変形例において、基準ターミナルをパターンの図面のピクセルに関連付ける所定の関係は、少なくとも1つの第1の基準ターミナルについてのみ予め記憶され、少なくとも1つの第2の基準ターミナルについては予め記憶されない。例えば、1個のみの基準ターミナルが存在する。次に、第1の基準ターミナルに対する第2の基準ターミナルの計測された位置と、第1の基準ターミナルをパターンの図面のピクセルに関連付ける所定の関係とに基づいて、第2の基準ターミナルについての所定の関係が確定される。
【0100】
基準ターミナルは、必ずしもパターンの頂点に対応しない。例えば、変形例として、基準ターミナルの各々は、パターンの頂点ではない所定の地点に関連付けられる。特に、基準ターミナルの1つは、パターンの中央に関連付けられている一方、他の点は、パターンの上端辺の中間点に関連付けられている。
【0101】
基準ターミナルは、基板の一方の側に配置することができ、ペンは、他の側に配置することができ得る。
【0102】
上記の図面に関連して記載した様々な構成要素は、ペンとターミナルの間で、変更し得る。例えば、変形例において、制御ユニットとメモリを、ターミナルに内蔵しうる。一般に、ここで記載されたペンの構成要素により成し遂げられる全ての機能は、ペンとターミナルの間で、異なった分配とすることができる。
【0103】
エッチングされるべきパターンの図面が記憶されたメモリは、また、必ずしもペン又はターミナルの1つの内に配置されるものではない。例えば、メモリは、インターフェース18を介してペン8と通信し得るコンピュータ内に配置し得る。この場合、ペンは、エッチングされるべきパターンの図面に関する情報を、その情報を必要とするときにのみ、要求することができる。
【0104】
また、磁界源は、ターミナル内ではなく、ペン内に配置されるようにすることも可能である。又は、同時に使用される複数の磁界源が、少なくとも1つがターミナル内に配置され、少なくとも1つがペン内に配置されるようにすることも可能である。
【0105】
変形例において、磁界源116及びセンサ120は、巻軸が同一直線上にない3個のコイルからなる単一かつ同一の三軸組み合わせ体を用いて作られる。この場合、三軸組み合わせ体は、磁界源モードとセンサモードで切り換えられる。三軸組み合わせ体のコイルは、磁界源モードに切り換えられたたとき、磁場を生成するように電力供給される。磁界源モードにおいては、三軸組み合わせ体は、上述の三軸磁界源の1つと同様のものである。センサモードにおいては、コイルには電力供給されない。その結果、コイルを通る周辺の磁束が電流を誘起し、この電流が周辺の磁界の計測を可能とする。センサモードにおいては、三軸組み合わせ体は、上述の三軸センサの1つと同様のものである。
【0106】
超広帯域幅波以外の種類の波も用いることができる。例えば、音波も用いることができる。
【0107】
ストレッチファクターは、例えば2つの基準ターミナルを互いに隔てる距離のみを用いて決定される。典型的には、この場合、ターミナルは、エッチングされるべきパターンの対角線を画定するために用いられ、望ましくは、この対角線の両端に配置される。
【0108】
他の変形例では、ストレッチファクターの計算は、省略される。この場合、エッチング領域の大きさは、一定であるか、メモリ16に記憶されているパターンの図面のサイズを用いて確定される。
【0109】
ペンの向きは、また、四元数により表わすことができる。
【0110】
各磁界源が、特有の周波数シグネチャを持つ周期的磁場を継続的に生成する場合、送信機/受信機30、32を用いて、磁界源102とセンサ94及び104を同期させる必要はない。その代りに、同期検波が用いる。
【0111】
また、エッチング方法は、変更することができる。例えば、エッチング方法は、自動的に停止されないようにすることもできる。この場合、基板4のエッチングは、自動的にではなく、操作者によって停止される。
【0112】
上記の工程72及びステップ74の様々な実施形態は、エッチング装置の如何なる実施形態とも組み合わせることができる。
【0113】
ステップ77は、エッチング領域内の所与の地点が、その地点上のペンの連続的通過でエッチングされることを可能とするように修正することができる。例えば、ステップ77において、エッチングされるピクセルに伴う情報が変更される。
【0114】
ステップ62は、エッチングが自動的に停止されるかを決定するために、他の規準が用いられるように修正することができる。例えば、簡略化された変形例では、閾値S1とS2との比較は省略される。
【0115】
他の変形例では、高さhが閾値S1を下回ったら、ペン8が基板4に近づき過ぎていることを操作者に知らせるように、例えば音声信号による警報が自動的に発動される。
【0116】
ステップ68においては、エッチングヘッドは、軸A1の向き及び/又はヘッドと基板間の距離hの関数として制御される。反対に、計測された向き又は距離hの関数としてのエッチングヘッドの制御は省略し得る。
【0117】
テーブル140は、エッチング装置の他の全ての実施形態に組み込むことができる。例えば、装置2に組み込まれる場合、ターミナル20〜23は、ターミナル96〜99に置き換えられる。
【0118】
テーブル140は、4本ではない複数の脚を備えている。しかしながら、少なくとも3本の脚を備えていることが望ましい。各脚の端部は、例えば吸盤等の基板への固定のための機構を備えていることができる。これにより、テーブル140は、基板が傾いていても、鉛直であっても、基板に載置することができる。
【0119】
他の変形例において、装置2は、同一のエッチング領域内の同一のパターンを同時にエッチングするために、複数のペンを備えることができる。これにより、複数の操作者が、同一のエッチング領域内の同一のパターンを、同時にエッチング作業することが可能となる。各ペンによりエッチングされる同一のパターンの様々な部分が、完全に並列するために要求されることは、これらのペンの各々の位置が、基準ターミナルに結合された同一の座標系内で計測されることが全てである。
【0120】
独立請求項における特徴は、パターンのエッチングを自動的に停止することを可能とする特徴とは独立して実施することができる。特に、中継ターミナルは、特定の地点Pにおけるパターンのエッチングを停止するという特徴を実施することなしに、用いることができる。
【符号の説明】
【0121】
2 パターンをエッチングするための装置
4 基板
8 ペン
10 エッチング領域
12 エッチングヘッド
14 制御ユニット
16 メモリ
18 インターフェース
20〜23 基準ターミナル
34 加速度計
36 磁力計
40 磁力計
90 エッチング装置
92 ペン
94 三軸磁界センサ
96〜99 基準ターミナル
102 三軸磁界源
110 エッチング装置
112 中継ターミナル
122 変換器
140 エッチング装置
142 テーブル
144 窓
146〜149 脚
【特許請求の範囲】
【請求項1】
物理基板上に配置されたエッチング領域内にパターンをエッチングする装置において、
前記エッチング領域に対して、手で自由に動かし得る少なくとも1つのペン(8、92)であって、エッチングが開始されたとき、エッチング地点において前記基板をエッチングすることができるエッチングヘッド(12)を備えるペン(8、92)と、
前記基板に対する前記エッチングヘッドの位置及び向きを計測する計測ユニットと、
制御ユニット(14)とを備え、
前記制御ユニット(14)は、
前記エッチングヘッドの計測された位置及び向きの関数として、前記エッチング地点の座標を計算し、
前記エッチング地点の計算された座標が、予め記憶されたパターンの図面に符号化されたエッチングされるべき地点の座標と一致したときには、前記エッチング地点におけるエッチングを開始し、一致しないときには、エッチングを自動的に禁止することを特徴とする装置。
【請求項2】
前記装置は、少なくとも1つの取り外し可能な基準ターミナル(20〜23;96〜99)を備え、前記基準ターミナル(20〜23:96〜99)は、前記基板上に手動で配置されることができ、基板上における前記基準ターミナルの位置に依存しない所定の関係により、エッチングされるべきパターンの対応する地点に関連付けられており、
前記計測ユニットは、前記基準ターミナルに対する前記エッチングヘッドの位置と向きを計測することができ、
前記制御ユニット(14)は、前記エッチング地点の計算された座標と、パターンの地点を前記基準ターミナルに関連付ける所定の関係の関数としてのエッチングされるべき地点の座標との一致又は不一致を確定することができる請求項1に記載の装置。
【請求項3】
前記装置は、少なくとも2個の基準ターミナル(20〜23:96〜99)を備え、
前記計測ユニットは、前記2個の基準ターミナル間の距離を計測可能であり、
前記制御ユニット(14)は、前記エッチング地点の計算された座標と、前記2個の基準ターミナル間の計測された距離の関数としてのエッチングされるべき地点の座標との一致又は不一致を確定することができ、前記距離に比例して前記パターンを拡大又は縮小する請求項2に記載の装置。
【請求項4】
前記装置は、前記基準ターミナルとは独立して手で配置し得る少なくとも1つの中継ターミナル(112)を備え、前記中継ターミナルは、前記基板に対するその位置に依存しない所定の関係により前記パターンの地点と関連付けられてはおらず、
前記計測ユニットは、更に、
前記中継ターミナルの座標系における前記エッチングヘッドの位置及び向きを検出するセンサ(94)と、
前記基準ターミナルに対する前記中継ターミナルの位置及び向きを検出するセンサ(120)と、
前記中継ターミナルの座標系において計測されたエッチングヘッドの位置及び向きを、前記基準ターミナルに対する位置及び向きに変換する変換器(122)とを備えることを特徴とする請求項2又は3に記載の装置。
【請求項5】
前記エッチングヘッド(12)は、前記エッチング地点をエッチングするレーザー光線を放射可能である請求項1〜4のいずれか1項に記載の装置。
【請求項6】
前記装置は、窓(144)を有するテーブル(142)を備え、前記窓(144)は、エッチングの破片の飛散を防止するものであり、また前記基板上に載置されるための脚を有しており、
前記少なくとも1つの基準ターミナルは、前記テーブルに対して自由度を持たないように固定されている請求項2〜4のいずれか1項または請求項5に記載の装置。
【請求項7】
前記エッチングヘッド(12)は、前記エッチング地点をエッチングする研磨材料からなる粒子を噴射することができる請求項1〜4のいずれか1項に記載の装置。
【請求項8】
基板材料上に配置されたエッチング領域内にパターンをエッチングする方法であって、
エッチングが開始されたときエッチング地点において、前記基板をエッチングすることができるエッチングヘッドを備えたペンを、前記エッチング領域上に手動で自由に動かす工程を有する方法において、
前記基板に対する前記エッチングヘッドの位置及び向きを計測する工程(56、58)と、
前記エッチングヘッドの計測された位置及び向きの関数として、前記エッチング地点の座標を計算する工程(66)と、
前記エッチング地点について計算された座標が、予め記憶されているパターンの図面において符号化されたエッチングされるべき地点の座標と一致する場合、エッチングを開始し、一致しない場合、エッチングを自動的に禁止する工程(77)とを有する方法。
【請求項9】
a)開始されたエッチングにより、既にエッチングがなされたパターンの各地点をメモリ内に記憶する工程と、
b)既にエッチングがなされたいずれの地点のエッチングも禁止する工程と、
c)1つの地点のエッチングを、開始後、所定時間後に自動的に停止する工程(74)とを備える請求項8に記載の方法。
【請求項10】
前記工程a)〜c)は、予め記憶された図面の各層について繰り返され、前記予め記憶された図面は、少なくとも1つの層を備え、前記少なくとも1つの層の各々は、対応する前記基板の層において、エッチングされるべき地点の座標で符号化されている請求項9に記載の方法。
【請求項11】
所与のエッチング地点のエッチングにおいて費やされた累積時間をカウントする工程(77)と、
カウントされたエッチング時間が所定の閾値を超えた場合、そのエッチング地点における更なるエッチングを禁止し、超えていない場合、そのエッチング地点における更なるエッチングを許容する工程とを備える請求項8に記載の方法。
【請求項12】
前記ペンを前記基板から隔てる距離を、前記エッチングヘッドの計測された位置及び向きを用いて決定し(60)、前記距離が所定の閾値よりも小さければ、前記基板における前記パターンのエッチングを禁止し(64)、または警報を発する請求項8〜11のいずれか1項に記載の方法。
【請求項13】
データ記憶媒体(16)において、請求項8〜12のいずれか1項に記載の方法を行うための命令を有し、前記命令は、電子処理装置により実行されることを特徴とするデータ記憶媒体(16)。
【請求項14】
前記エッチング領域上に手動で動かし得るエッチングヘッド(12)を備えたペン(8、91)において、前記ペンは、前記基板に対する前記エッチングヘッドの位置を計測可能な計測ユニットの少なくとも幾つかの構成要素(30、94)を備えていることを特徴とする請求項1〜8のいずれか1項に記載の装置において用いられるペン(8、92)。
【請求項1】
物理基板上に配置されたエッチング領域内にパターンをエッチングする装置において、
前記エッチング領域に対して、手で自由に動かし得る少なくとも1つのペン(8、92)であって、エッチングが開始されたとき、エッチング地点において前記基板をエッチングすることができるエッチングヘッド(12)を備えるペン(8、92)と、
前記基板に対する前記エッチングヘッドの位置及び向きを計測する計測ユニットと、
制御ユニット(14)とを備え、
前記制御ユニット(14)は、
前記エッチングヘッドの計測された位置及び向きの関数として、前記エッチング地点の座標を計算し、
前記エッチング地点の計算された座標が、予め記憶されたパターンの図面に符号化されたエッチングされるべき地点の座標と一致したときには、前記エッチング地点におけるエッチングを開始し、一致しないときには、エッチングを自動的に禁止することを特徴とする装置。
【請求項2】
前記装置は、少なくとも1つの取り外し可能な基準ターミナル(20〜23;96〜99)を備え、前記基準ターミナル(20〜23:96〜99)は、前記基板上に手動で配置されることができ、基板上における前記基準ターミナルの位置に依存しない所定の関係により、エッチングされるべきパターンの対応する地点に関連付けられており、
前記計測ユニットは、前記基準ターミナルに対する前記エッチングヘッドの位置と向きを計測することができ、
前記制御ユニット(14)は、前記エッチング地点の計算された座標と、パターンの地点を前記基準ターミナルに関連付ける所定の関係の関数としてのエッチングされるべき地点の座標との一致又は不一致を確定することができる請求項1に記載の装置。
【請求項3】
前記装置は、少なくとも2個の基準ターミナル(20〜23:96〜99)を備え、
前記計測ユニットは、前記2個の基準ターミナル間の距離を計測可能であり、
前記制御ユニット(14)は、前記エッチング地点の計算された座標と、前記2個の基準ターミナル間の計測された距離の関数としてのエッチングされるべき地点の座標との一致又は不一致を確定することができ、前記距離に比例して前記パターンを拡大又は縮小する請求項2に記載の装置。
【請求項4】
前記装置は、前記基準ターミナルとは独立して手で配置し得る少なくとも1つの中継ターミナル(112)を備え、前記中継ターミナルは、前記基板に対するその位置に依存しない所定の関係により前記パターンの地点と関連付けられてはおらず、
前記計測ユニットは、更に、
前記中継ターミナルの座標系における前記エッチングヘッドの位置及び向きを検出するセンサ(94)と、
前記基準ターミナルに対する前記中継ターミナルの位置及び向きを検出するセンサ(120)と、
前記中継ターミナルの座標系において計測されたエッチングヘッドの位置及び向きを、前記基準ターミナルに対する位置及び向きに変換する変換器(122)とを備えることを特徴とする請求項2又は3に記載の装置。
【請求項5】
前記エッチングヘッド(12)は、前記エッチング地点をエッチングするレーザー光線を放射可能である請求項1〜4のいずれか1項に記載の装置。
【請求項6】
前記装置は、窓(144)を有するテーブル(142)を備え、前記窓(144)は、エッチングの破片の飛散を防止するものであり、また前記基板上に載置されるための脚を有しており、
前記少なくとも1つの基準ターミナルは、前記テーブルに対して自由度を持たないように固定されている請求項2〜4のいずれか1項または請求項5に記載の装置。
【請求項7】
前記エッチングヘッド(12)は、前記エッチング地点をエッチングする研磨材料からなる粒子を噴射することができる請求項1〜4のいずれか1項に記載の装置。
【請求項8】
基板材料上に配置されたエッチング領域内にパターンをエッチングする方法であって、
エッチングが開始されたときエッチング地点において、前記基板をエッチングすることができるエッチングヘッドを備えたペンを、前記エッチング領域上に手動で自由に動かす工程を有する方法において、
前記基板に対する前記エッチングヘッドの位置及び向きを計測する工程(56、58)と、
前記エッチングヘッドの計測された位置及び向きの関数として、前記エッチング地点の座標を計算する工程(66)と、
前記エッチング地点について計算された座標が、予め記憶されているパターンの図面において符号化されたエッチングされるべき地点の座標と一致する場合、エッチングを開始し、一致しない場合、エッチングを自動的に禁止する工程(77)とを有する方法。
【請求項9】
a)開始されたエッチングにより、既にエッチングがなされたパターンの各地点をメモリ内に記憶する工程と、
b)既にエッチングがなされたいずれの地点のエッチングも禁止する工程と、
c)1つの地点のエッチングを、開始後、所定時間後に自動的に停止する工程(74)とを備える請求項8に記載の方法。
【請求項10】
前記工程a)〜c)は、予め記憶された図面の各層について繰り返され、前記予め記憶された図面は、少なくとも1つの層を備え、前記少なくとも1つの層の各々は、対応する前記基板の層において、エッチングされるべき地点の座標で符号化されている請求項9に記載の方法。
【請求項11】
所与のエッチング地点のエッチングにおいて費やされた累積時間をカウントする工程(77)と、
カウントされたエッチング時間が所定の閾値を超えた場合、そのエッチング地点における更なるエッチングを禁止し、超えていない場合、そのエッチング地点における更なるエッチングを許容する工程とを備える請求項8に記載の方法。
【請求項12】
前記ペンを前記基板から隔てる距離を、前記エッチングヘッドの計測された位置及び向きを用いて決定し(60)、前記距離が所定の閾値よりも小さければ、前記基板における前記パターンのエッチングを禁止し(64)、または警報を発する請求項8〜11のいずれか1項に記載の方法。
【請求項13】
データ記憶媒体(16)において、請求項8〜12のいずれか1項に記載の方法を行うための命令を有し、前記命令は、電子処理装置により実行されることを特徴とするデータ記憶媒体(16)。
【請求項14】
前記エッチング領域上に手動で動かし得るエッチングヘッド(12)を備えたペン(8、91)において、前記ペンは、前記基板に対する前記エッチングヘッドの位置を計測可能な計測ユニットの少なくとも幾つかの構成要素(30、94)を備えていることを特徴とする請求項1〜8のいずれか1項に記載の装置において用いられるペン(8、92)。
【図1】


【図2】
【図3】
【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−232345(P2012−232345A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−105107(P2012−105107)
【出願日】平成24年5月2日(2012.5.2)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2012−105107(P2012−105107)
【出願日】平成24年5月2日(2012.5.2)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
【Fターム(参考)】
[ Back to top ]