
ピッキングシステム
【課題】 経済的であり、かつ、棚の仕様に左右されることなく物品のロケーションおよび数を表示することのできるピッキングシステムを提供する。
【解決手段】 棚1に収納した物品をピッキングするロケーションを表示するためのピッキングシステムに関する。棚1の上端部に水平方向Yに沿って、かつ、棚1の間口が並ぶ方向に沿って敷設されたレール2と、前記レール2に案内されて棚1の上部を水平方向Yに移動するスライダ3と、前記スライダ3から索条Bを介して垂れ下がり、物品をピッキングするロケーションを指し示すための指標5と、前記スライダ3の水平移動と前記指標5の昇降とを選択的に行うための駆動装置とを備えたことを特徴とする。
【解決手段】 棚1に収納した物品をピッキングするロケーションを表示するためのピッキングシステムに関する。棚1の上端部に水平方向Yに沿って、かつ、棚1の間口が並ぶ方向に沿って敷設されたレール2と、前記レール2に案内されて棚1の上部を水平方向Yに移動するスライダ3と、前記スライダ3から索条Bを介して垂れ下がり、物品をピッキングするロケーションを指し示すための指標5と、前記スライダ3の水平移動と前記指標5の昇降とを選択的に行うための駆動装置とを備えたことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ピッキングシステムに関する。
【背景技術】
【0002】
従来より、棚に収納された機械部品などの物品のピッキングを行うには、棚の間仕切りごとに表示器を設け、ピッキングする物品の収納された間口を指示すると共に、当該ピッキング数を表示させるなどの方法が採用されている(特許文献1)。
【特許文献1】特開平10−35838号公報 (要約書、図1)
【発明の開示】
【0003】
しかし、従来の方法では、棚の間仕切りごとに数十から数百の表示器が必要となり、コストアップを免れない。また、棚の間仕切りの幅が狭い場合などには、表示器を設けるのが難しい。
【0004】
したがって、本発明の目的は、経済的であり、かつ、棚の仕様に左右されることなく物品のロケーション(場所)および数を表示することのできるピッキングシステムを提供することである。
【0005】
上記目的を達成するために、本発明のピッキングシステムは、棚に収納した物品をピッキングするロケーションを表示するためのピッキングシステムであって、棚の上端部に水平方向に沿って、かつ、棚の間口が並ぶ方向に沿って敷設されたレールと、前記レールに案内されて棚の上部を水平方向に移動するスライダと、前記スライダから索条を介して垂れ下がり、物品をピッキングするロケーションを指し示すための指標と、前記スライダの水平移動と前記指標の昇降とを選択的に行うための駆動装置とを備えたことを特徴とする。
【0006】
本発明によれば、前記スライダから索条を介して垂れ下がった指標によりロケーションが指示される。そのため、従来の方法では棚の間仕切りごとに必要であった数十〜数百個の表示器を1個にすることができるので、大幅なコストダウンを図ることができる。
周知のように、“棚”は、奥行を有する開口により構成されており、本発明において、“棚の間口”とは、前記開口からなる棚の前面のことをいう。
なお、前記スライダや指標にピッキング数等のピッキング情報を表示するのが好ましい。また、別途、ピッキング情報を表示する表示器を棚の近傍に設けてもよい。
【0007】
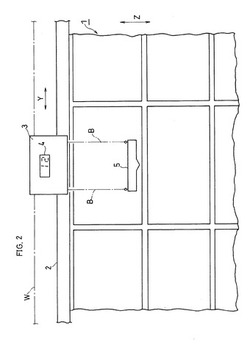
また、スライダから索条を介して垂れ下がった指標によりロケーションが指示されるので、間仕切り自体の幅が狭く表示器を設けることが難しいタイプの棚であっても、指標により、ピッキングを行う物品のロケーションを表示することができる。また、棚の間仕切りの間隔が狭い場合や、図1に示すように、棚の間仕切りが変則的であっても、確実にピッキングを行う物品のロケーションを指示することができる。
【0008】
なお、指標をスライダに向って引き上げた状態でスライダを移動させることにより、棚の間口から前方に物品が突出している場合であっても、当該物品に指標が衝突するのを防止することができる。
さらに、棚の間口が該棚の奥行方向の両面に設けられている場合には、指標を棚の上方に引き上げた状態で、反対側の間口に旋回させることにより、反対側の間口にも対応することができる。したがって、1つのピッキングシステムで両側の間口に収納された物品のロケーションを指示することができるので、大幅なコストダウンを図り得る。
【0009】
本発明において、前記駆動装置は、1つの駆動モータにより前記指標の水平移動と、前記指標の昇降・停止を可能にした駆動装置であって、一対の巻回部を有しモータに取り付けられた駆動ドラムと、該駆動ドラムの回転で回転する従動プーリと、前記スライダに回転自在に取り付けられた移動プーリと、前記駆動ドラムの一方の巻回部から前記2つのプーリの外周に巻回され、更に前記駆動ドラムの他方の巻回部まで架け渡されたワイヤと、前記移動プーリの回転で前記索条を巻き取り、巻き出す索条ドラムと、前記スライダが前記レールに対し相対移動しないようにロックする第1ロック手段と、前記移動プーリが回転しないようにロックする第2ロック手段と、前記第2ロック手段が、前記移動プーリが回転しないようにした状態では、前記索条ドラムが回転せずに、前記駆動ドラムの回転により、一方の前記巻回部にワイヤが巻き取られると共に他方の前記巻回部からワイヤが巻き出されて、従動プーリが回転すると共に、前記スライダが水平方向に移動し、前記第1ロック手段が前記スライダを移動させないようにロックした状態では、駆動ドラムの回転により、一方の前記巻回部にワイヤが巻き取られると共に他方の前記巻回部からワイヤが巻き出されて、前記2つのプーリが回転して、前記移動プーリの回転により、前記索条ドラムが回転して、前記指標の索条の巻取・巻出が実行される。
【0010】
かかる態様によれば、指標の昇降・停止と、表示器の水平移動を1つのモータにより行うことができるので、コストダウンを図り得る。
【0011】
ここで、ワイヤの代わりに、たとえば、タイミングベルトを採用することも考えられる。しかし、タイミングベルトの市販品の長さには限界があるので、たとえば、棚の水平方向の長さが、たとえば、10メートル近くなるような場合には、タイミングベルトを採用するのが難しい。また、長いタイミングベルトを用いた場合には、タイミングベルトの重量が大きくなると共に、駆動時にタイミングベルトが大きく伸張する。そのため、システムの大型化や精度の低下が避けられない。
これに対し、前記態様では、ワイヤにより動力を伝達するので、横に長い棚であってもスライダの移動が可能である。また、ワイヤはタイミングベルトに比べて大幅に軽量、かつ、径小であるので、システムの大幅な小型化を図り得る。さらに、ワイヤは、タイミングベルトに比べ伸縮率が小さく、かつ、径小であるので、精度の低下を防止することができる。
【0012】
しかも、無端状のワイヤをプーリで回転させるものではないから、ワイヤと駆動ドラムとの間に滑りが生じるおそれもない。
【0013】
本発明において、前記駆動ドラムを回転自在に支持すると共に、前記駆動ドラムおよびモータを当該駆動ドラムの軸方向に移動自在に支持するドラム台と、前記駆動ドラムが正転方向に回転した場合に前記ドラム台が前記軸方向の第1の方向に所定量移動するように規制すると共に、前記駆動ドラムが前記正転方向とは逆の逆転方向に回転した場合に前記ドラム台が前記軸方向の第2の方向に所定量移動するように規制して、前記ワイヤの巻取位置および巻出位置が一定となるように制御するネジ手段とを更に備えている。
【0014】
かかる態様によれば、駆動ドラムが回転した場合に前記ドラム台が前記軸方向に所定量移動するように規制されているので、ワイヤが概ね同一の位置から巻出・巻取されるから、ワイヤが斜めにならない。そのため、スライダの停止精度がより一層向上する。
【発明を実施するための最良の形態】
【0015】
実施例1:
以下、本発明の実施例を図面に従って説明する。
図1〜図4は実施例1を示す。
図1に示すように、棚1は複数の間仕切りで仕切られており、たとえば、機械部品などからなる物品が収納されている。
棚1には、前記ピッキングを行う物品の収納されたロケーション(場所)と数を表示するためのピッキングシステムが設けられている。作業者は、前記ピッキングシステムにより指示されたロケーションおよび数に基づいて、所定種類の物品を所定個数だけ棚1から取り出すことでピッキングを行う。
【0016】
全体構成:
前記ピッキングシステムは、レール2、スライダ3および指標5を備えている。
前記レール2は、棚の上端部に略水平方向Yに沿って、かつ、棚1の間口1aに沿って敷設されている。
【0017】
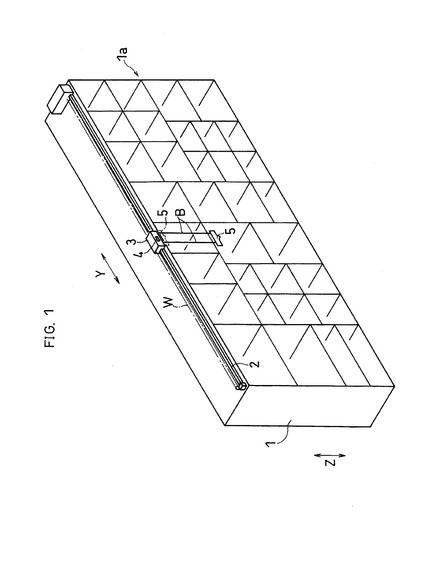
前記スライダ3は、レール2に沿って水平方向Yに移動する。図2に示すように、スライダ3には、ピッキング数を表示する表示器4が取り付けられている。表示器4としては、たとえば、7セグメントLED(Light Emitting Diodes)や液晶表示器を採用することができる。
前記指標5は、スライダ3からヒモ(索条)Bを介して上下方向Zに垂れ下がり、物品をピッキングするロケーションを指し示す。
本システムは、たとえば、パーソナルコンピュータなどからなる図示しない制御装置によって制御される。
【0018】
ワイヤWの取りまわし:
スライダ3は、ワイヤWによって水平方向Yに移動される。図1に示すように、ワイヤWはレール2に沿って水平方向Yに張設されている。
【0019】
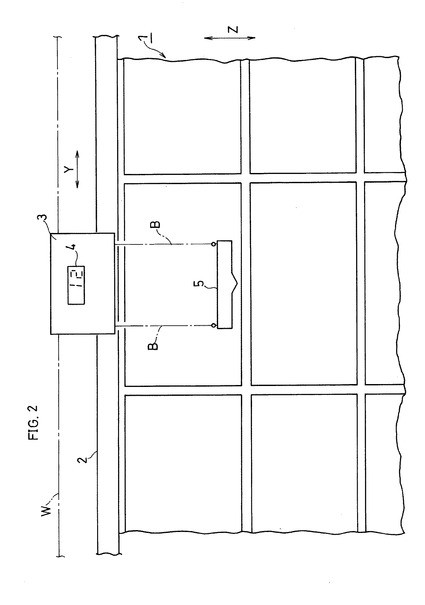
図3Aは本システムの概略平面図、図3Bは本システムの概略正面図である。
図3Aに示すように、ワイヤWは、棚1の一方の端部に設けられた駆動ドラム20の第1巻回部20aに巻回され、該棚1(図1)の他方の端部に設けられた従動プーリ21を介して再び駆動ドラム20の第2巻回部20bに巻回されている。なお、ワイヤWは有端であり、両端部が駆動ドラム20にそれぞれ固定されている。なお、前記駆動ドラム20は、駆動モータ(駆動装置)Mにより回転駆動される。
【0020】
前記スライダ3には、移動プーリ30が搭載されている。移動プーリ30には、前記ワイヤWが巻回されている。
なお、ワイヤWの取りまわしをスムースに行う為、ワイヤWの方向転換を行う箇所等には、補助プーリ24がそれぞれ設けられている。
【0021】
スライダ3:
前記移動プーリ30は、シャフト31を中心に、回転自在にスライダ3に取り付けられている。前記スライダ3には、前記レール2に案内される車輪35が設けられており、スライダ3は車輪35により、レール2に沿って水平方向Yに移動可能に設定されている。
【0022】
前述のように、移動プーリ30にはワイヤWが巻回されているので、移動プーリ30の回転をロックすると、ワイヤWの水平方向Yの移動によりスライダ3をレール2に沿って水平方向Yに移動させることができる。一方、スライダ3をレール2にロックすると、ワイヤWにより移動プーリ30が回転される。
【0023】
索条ドラム32:
図3Bに示す前記シャフト31の両端には、一対の索条ドラム32が固定されている。索条ドラム32には、ヒモBの一端が固定されていると共に、該ヒモBが巻回されている。ヒモBの他端には、前記指標5が固定されている。前記ワイヤWにより、移動プーリ30が回転されると、シャフト31を介して両端の索条ドラム32が回転され、索条ドラム32に巻回されているヒモBの巻出・巻取が行われる。
【0024】
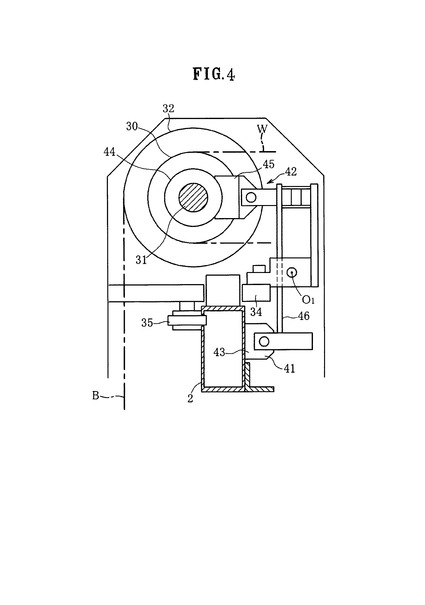
ロック手段41,42:
図4は、図3AにおけるIV-IV 線断面図である。
図4に示すように、スライダ3には、移動プーリ30の回転とスライダ3の水平移動を選択的にロックするロック手段41,42が設けられている。第1ロック手段41および第2ロック手段42は、スライダ本体34に揺動自在に設けられた揺動アーム46と、該揺動アーム46の両端に設けられた第1および第2ブレーキシュー43,45を備えている。前記シャフト31には、ブレーキドラム44が固定されている。
【0025】
揺動アーム46が、図示しないアクチュエータによって回動中心Oを中心に回動し、第1ブレーキシュー43がレール2の側面を押し付けることにより、スライダ3がレール2に対してロックされる。かかる場合には、第2ブレーキシュー45はブレーキドラム44から離れている。
一方、揺動アーム46が前記揺動中心Oを中心に逆方向に回動すると、第2ブレーキシュー45がブレーキドラム44を押し付け移動プーリ30の回転がロックされる。かかる場合には、第1ブレーキシュー43はレール2から離れている。
【0026】
駆動ドラム20:
図3Aに示すように、レール2の一方の端部には、ドラム台11が設けられている。ドラム台11は、駆動ドラム20を回転自在に支持している。ドラム台11は、ドラムスライダ13に固定されている。一方、レール2の端部には、ドラムフレーム14が固定されており、ドラムフレーム14には、ドラムガイド12が設けられている。ドラムガイド12は、前記ドラムスライダ13を介してドラム台11を軸方向Xに摺動自在に支持すると共に案内する。
【0027】
ドラムフレーム14には、駆動ドラム20の回転軸に沿って設けられた雄ネジ15が設けられている。駆動ドラム20には、前記雄ネジ15に螺合する雌ネジ16が形成されている。前記雄ネジ15および雌ネジ16は、駆動ドラム20が軸方向Xに移動するように規制して、前記ワイヤWの巻取位置および巻出位置が一定となるように制御するネジ手段を構成している。
【0028】
すなわち、駆動ドラム20が正回転して、第1巻回部20aが巻出回転し、かつ、第2巻回部20bが巻取回転した場合には、前記ネジ手段により、ドラム台11が軸方向Xの第1の方向D1にネジ手段のピッチに応じて所定量移動するように規制される。一方、駆動ドラム20が逆回転して、第1巻回部20aが巻取回転し、かつ、第2巻回部20bが巻出回転した場合には、前記ネジ手段により、ドラム台11が軸方向Xの第2の方向D2に所定量移動するように規制される。なお、前記ネジ手段のネジ山のピッチは、ワイヤWの巻取・巻出位置が概ね一定となるピッチに設定されている。たとえば、前記ネジ山のピッチは、ワイヤWの径に近似した値に設定されている。
【0029】
本システムのピッキング指示動作:
図1に示すように、指標5は二点鎖線で示す上昇端に位置している。
前記制御装置は、ピッキングを行う物品のロケーションおよび数に従い、以下のように本システムの制御を行う。
【0030】
まず、当該物品が収納されている水平方向Yのロケーションに向ってスライダ3を移動させる。すなわち、図4に示す揺動アーム46が回動し、第2ロック手段42の第2ブレーキシュー45がブレーキドラム44に接触することにより、移動プーリ30が回動しないようにロックする。図3Aの移動プーリ30が回転しないようにした状態では、索条ドラム32が回転せずに、駆動ドラム20および従動プーリ21が回転することにより、指標5が上昇端に上昇したままの状態で、ワイヤWによりスライダ3が水平方向Yに移動される。
【0031】
スライダ3がピッキングを行う物品の収納されたロケーションの上方まで移動されると、図4の第2ロック手段42が解除されると共に第1ロック手段41がロックされ、スライダ3が所定のロケーションの上方位置で停止すると共に、指標5が下降を始める。
【0032】
すなわち、前記揺動アーム46が回動することで、第2ロック手段42の第2ブレーキシュー45がブレーキドラム44から離れると共に、第1ロック手段41の第1ブレーキシュー43がレール2に接触し、スライダ3が停止される。第1ロック手段41がスライダ3を移動させないようにした状態では、駆動モータMの駆動により、駆動ドラム20が回転すると、ワイヤWにより、従動プーリ21および移動プーリ30が回転する。移動プーリ30が回転することで、シャフト31を介して索条ドラム32が回転し、指標5のヒモBが巻き出される。
一方、図2に示す表示器4には、当該ピッキングを行う物品の個数が表示される。
【0033】
作業者が、指示されたロケーションおよび個数に基づいてピッキングを行った後、スライダ3に所定の操作を行うと、駆動モータMが逆回転し、ヒモBが巻き取られて、指標5が上昇端まで上昇する。その後、揺動アーム46が回動し、第2ロック手段42の第2ブレーキシュー45がブレーキドラム44に接触することにより、移動プーリ30が回動しないようにロックされ、ワイヤWの移動により、次のピッキングを行う物品が収納されている水平方向Yのロケーションに向ってスライダ3が移動される。
【0034】
なお、前述の実施例では、第1および第2ロック手段41,42の一例として、揺動アーム46を回動させることにより、ロック状態を選択的に切り換えることとしたが、移動プーリ30が回転しない状態とスライダ3を移動させない状態とを行い得る機構であればどのような機構であってもよい。
【0035】
実施例2:
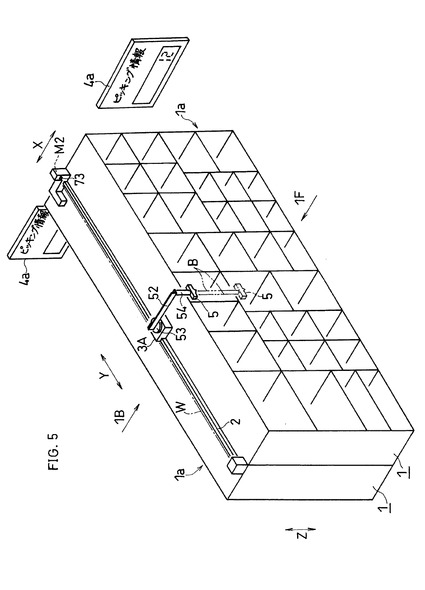
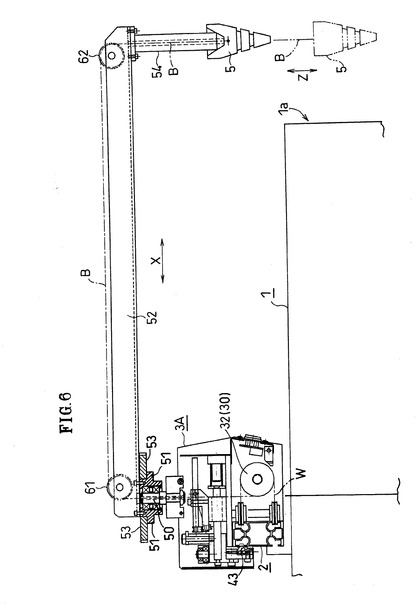
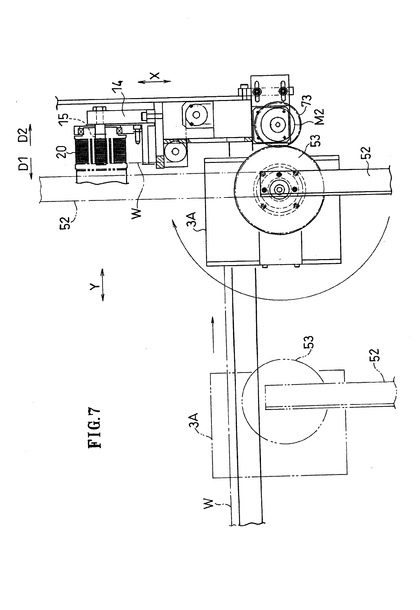
図5〜図7は実施例2を示す。
図5に示すように、本実施例2では、一対の棚1,1の背面同士が互いに接するように設置してある。したがって、棚の間口1a,1aは該棚の奥行方向Xの両面、すなわち、前面1Fおよび背面1Bにそれぞれ位置している。
棚1の近傍には、ピッキング情報を表示する表示器4aが、棚1の前面1Fおよび背面1Bにそれぞれ設けられている。
【0036】
レール2;
レール2は、棚1の上端部において、略水平方向Y、すなわち、棚1の間口1aの並ぶ方向に沿って敷設されている。レール2は、前記一対の棚1,1の奥行方向Xの概ね境界部分、すなわち、棚1,1の奥行方向Xの概ね中央に設けられている。
【0037】
アーム52;
スライダ3Aは、その上部にアーム52を備えている。図6に示すように、アーム52の一方の端部は、旋回部51の上部に固定されている。前記スライダ3Aには旋回軸50が固定されており、旋回部51は旋回軸50を中心に回動自在に設けられている。
【0038】
アーム52の他端部には、案内パイプ54が下方に向って延設されている。アーム52の両端部には、案内プーリ61,62が回転自在に設けられている。スライダ3Aの索条ドラム32に巻回されたヒモBの端部は、前記案内プーリ61,62を介してアーム52に沿うように案内され、案内パイプ54内を通り、該案内パイプ54の下端部に垂下された指標5に固定されている。
したがって、索条ドラム32の回転により、該索条ドラム32に巻回されているヒモBの巻出・巻取が行われることで、アーム52の案内プーリ61,62を介して指標5が上下方向Zに移動可能される。
なお、案内パイプ54の長さは、指標5が上昇し該案内パイプ54の下端部に接触した上昇端の位置において、前記指標5の下端部が棚1の上端部よりも高くなるように設定されている。
【0039】
アーム52の旋回機構;
前記旋回部51には旋回ギヤ53が固定されている。一方、図5および図7に示すように、前記レール2の一方の端部には駆動ギヤ73が設けられている。駆動ギヤ73の上部には、該駆動ギヤ73を回転させるための第2駆動モータM2が設けられている。
【0040】
図7に示すように、スライダ3Aが略水平方向Yに移動し、駆動ギヤ73の設けられた棚1の一方の端部に達すると、旋回ギヤ53と駆動ギヤ73とが噛み合うと共に、該スライダ3Aの移動が停止される。その後、スライダ3Aが停止した状態で、第2駆動モータM2が駆動ギヤ73を回転させると、該駆動ギヤ73により旋回ギヤ53が回動され、アーム52が矢印で示すように180°回動される。
【0041】
なお、本実施例2では、図7に示すように、駆動ドラム20が略水平方向Yに沿って設けられているが、駆動ドラム20の駆動モータ、ドラムスライダおよびワイヤWの方向転換用のプーリ等については、説明の簡略化のためにその図示を省略している。
その他の構成は、実施例1と同様であり、同一部分または相当部分に同一符号を付して、その詳しい説明および図示を省略する。
【0042】
ピッキング指示動作:
初期状態において、図5に示すように、前記アーム52は、たとえば、前面1F(一方の面)に指標5が位置するように、略水平方向Yに概ね直交する方向に設定されている。
【0043】
作業者が所定の操作を行うと、ピッキングを行う物品が収納されている水平方向Yのロケーションに向ってスライダ3Aを移動させる。スライダ3Aがピッキングを行う物品の収納されたロケーションの上方まで移動されると、該スライダ3Aが所定のロケーションの上方位置で停止すると共に、図6の案内プーリ61,62を介して、指標5が棚1の前面1Fに沿って下降を始める。図5の二点鎖線で示すように、指標5は、当該ピッキングを行う物品が入れられた仕切りを指し示す位置で停止する。一方、表示器4aには、当該ピッキングを行う物品の個数が表示される。
【0044】
作業者が、指標5によって指示されたロケーションと、表示器4aに表示された個数に基づいてピッキングを行った後、スライダ3に所定の操作を行うと、駆動モータMが逆回転し、ヒモBが巻き取られて、指標5が上昇端、すなわち、前記案内パイプ54の下端部まで上昇する。その後、次のピッキングを行う物品が収納されている水平方向Yのロケーションに向ってスライダ3が移動される。
【0045】
アーム52の回動動作:
作業者がピッキングを繰り返し、前面1Fの間口1aからのピッキングが終了すると、次に、背面1Bの間口1aからのピッキングが行なわれる。
図5の指標5が上昇端まで上昇した後、スライダ3Aが駆動ギヤ73の設けられた棚1の端部に向って移動し、図7に示すように、スライダ3Aの旋回ギヤ53と駆動ギヤ73とが噛み合う位置で停止する。その後、第2モータM2が駆動ギヤ73を回転させることにより、旋回ギヤ53が回動され、矢印で示すように、アーム52が実線で示す初期状態から、二点鎖線で示す反転状態まで180°回動される。前記アーム52の回動(反転)により、該アーム52の先端部に設けられた指標5が、棚1の前面1F側から背面1B側に移動される。
【0046】
なお、図6に示すように、ヒモBが索条ドラム32に巻き戻されることで、指標5は、前記案内パイプ54の下端部に接触する上昇端まで上昇し、案内パイプ54の下端部に固定される。そのため、アーム52が回動しても、指標5が不用意に揺動するのを防止することができる。
【0047】
その後、図5に示す前記背面1Bの間口1aにおいて、スライダ3Aが略水平方向Yに移動されると共に、所定のロケーションの上方位置で停止され、指標5が下降される。一方、表示器4aには、当該ピッキングを行う物品の個数が表示される。
棚1の背面1Bに移動した作業者は、指標5および表示器4aによって指示されたロケーションおよび個数に基づいて背面1Bのピッキング作業を行う。
【0048】
作業者がピッキングを繰り返し、背面1Bでのピッキング作業が終了すると、指標5が上昇端まで上昇し、図7に示すスライダ3Aが駆動ギヤ73に向って略水平方向Yに移動する。駆動ギヤ73が逆回転することにより、アーム52が逆方向に180°回転され、図7の実線で示す初期状態に戻る。
【0049】
なお、前記実施例2では、間口1aが前面1Fと背面1Bの両面にある棚であればよく、必ずしも2台の棚を背中合わせに設置する必要はない。
また、奥行方向Xに仕切りのない棚を用いてもよい。
【0050】
さらに、前記ピッキング情報としては、ピッキングを行う個数の他に、たとえば、棚の列No. や段No. などを表示してもよい。さらに、棚に引出し等を設け奥行方向Xに複数種類の部品を収納した場合には、奥No. を表示するようにしてもよい。
また、指標5にピッキング情報を表示する表示器を設けてもよい。
さらには、アーム52が回動した際に、アーム52が不用意な角度で停止し、下降する指標5が棚1の間口1aに接触することがないように、アーム52を棚1の略水平方向Yに略直交する位置に固定するロック機構を設けてもよい。
また、レール2の両端に駆動ギヤ73を設けてもよい。
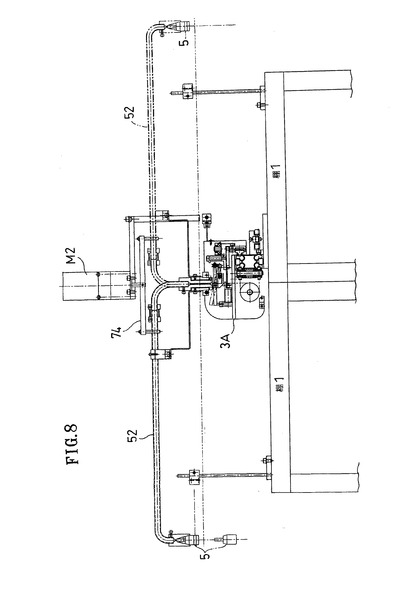
また、前述の実施例2では、駆動ギヤ73の回転により、旋回ギヤ53を介してアーム52の旋回を行うこととしたが、アーム52の旋回機構としては、該アーム52を旋回し得る機構であればよく、前述のギアを用いる方法の他に、たとえば、図8に示すように、第2モータM2によって回転駆動される旋回ロッド74を設け、該旋回ロッド74が直接アーム52に接触することで、該アーム52の旋回を行うようにしてもよい。
【産業上の利用可能性】
【0051】
本発明は、棚に収納された物品のピッキングに適用することができる。
【図面の簡単な説明】
【0052】
【図1】本発明の実施例1にかかるピッキングシステムを示す概略斜視図である。
【図2】同システムの概略正面図である。
【図3】図3Aは同システムの駆動装置を示す概略平面図、図3Bは同駆動装置の概略正面図である。
【図4】同駆動装置の概略断面図である。
【図5】本発明の実施例2にかかるピッキングシステムを示す概略斜視図である。
【図6】同スライダを示す概略断面図である。
【図7】同スライダの旋回方法を示す一部を破断した概略平面図である。
【図8】スライダの旋回方法の変形例を示す一部破断した概略側面図である。
【符号の説明】
【0053】
1:棚
1a:間口
2:レール
3,3A:スライダ
5:指標
11:ドラム台
20:駆動ドラム
21:従動プーリ
30:移動プーリ
32:索条ドラム
41:第1ロック手段
42:第2ロック手段
B:ヒモ(索条)
M:駆動モータ(駆動装置)
W:ワイヤ
Y:棚の間口が並ぶ方向
【技術分野】
【0001】
本発明は、ピッキングシステムに関する。
【背景技術】
【0002】
従来より、棚に収納された機械部品などの物品のピッキングを行うには、棚の間仕切りごとに表示器を設け、ピッキングする物品の収納された間口を指示すると共に、当該ピッキング数を表示させるなどの方法が採用されている(特許文献1)。
【特許文献1】特開平10−35838号公報 (要約書、図1)
【発明の開示】
【0003】
しかし、従来の方法では、棚の間仕切りごとに数十から数百の表示器が必要となり、コストアップを免れない。また、棚の間仕切りの幅が狭い場合などには、表示器を設けるのが難しい。
【0004】
したがって、本発明の目的は、経済的であり、かつ、棚の仕様に左右されることなく物品のロケーション(場所)および数を表示することのできるピッキングシステムを提供することである。
【0005】
上記目的を達成するために、本発明のピッキングシステムは、棚に収納した物品をピッキングするロケーションを表示するためのピッキングシステムであって、棚の上端部に水平方向に沿って、かつ、棚の間口が並ぶ方向に沿って敷設されたレールと、前記レールに案内されて棚の上部を水平方向に移動するスライダと、前記スライダから索条を介して垂れ下がり、物品をピッキングするロケーションを指し示すための指標と、前記スライダの水平移動と前記指標の昇降とを選択的に行うための駆動装置とを備えたことを特徴とする。
【0006】
本発明によれば、前記スライダから索条を介して垂れ下がった指標によりロケーションが指示される。そのため、従来の方法では棚の間仕切りごとに必要であった数十〜数百個の表示器を1個にすることができるので、大幅なコストダウンを図ることができる。
周知のように、“棚”は、奥行を有する開口により構成されており、本発明において、“棚の間口”とは、前記開口からなる棚の前面のことをいう。
なお、前記スライダや指標にピッキング数等のピッキング情報を表示するのが好ましい。また、別途、ピッキング情報を表示する表示器を棚の近傍に設けてもよい。
【0007】
また、スライダから索条を介して垂れ下がった指標によりロケーションが指示されるので、間仕切り自体の幅が狭く表示器を設けることが難しいタイプの棚であっても、指標により、ピッキングを行う物品のロケーションを表示することができる。また、棚の間仕切りの間隔が狭い場合や、図1に示すように、棚の間仕切りが変則的であっても、確実にピッキングを行う物品のロケーションを指示することができる。
【0008】
なお、指標をスライダに向って引き上げた状態でスライダを移動させることにより、棚の間口から前方に物品が突出している場合であっても、当該物品に指標が衝突するのを防止することができる。
さらに、棚の間口が該棚の奥行方向の両面に設けられている場合には、指標を棚の上方に引き上げた状態で、反対側の間口に旋回させることにより、反対側の間口にも対応することができる。したがって、1つのピッキングシステムで両側の間口に収納された物品のロケーションを指示することができるので、大幅なコストダウンを図り得る。
【0009】
本発明において、前記駆動装置は、1つの駆動モータにより前記指標の水平移動と、前記指標の昇降・停止を可能にした駆動装置であって、一対の巻回部を有しモータに取り付けられた駆動ドラムと、該駆動ドラムの回転で回転する従動プーリと、前記スライダに回転自在に取り付けられた移動プーリと、前記駆動ドラムの一方の巻回部から前記2つのプーリの外周に巻回され、更に前記駆動ドラムの他方の巻回部まで架け渡されたワイヤと、前記移動プーリの回転で前記索条を巻き取り、巻き出す索条ドラムと、前記スライダが前記レールに対し相対移動しないようにロックする第1ロック手段と、前記移動プーリが回転しないようにロックする第2ロック手段と、前記第2ロック手段が、前記移動プーリが回転しないようにした状態では、前記索条ドラムが回転せずに、前記駆動ドラムの回転により、一方の前記巻回部にワイヤが巻き取られると共に他方の前記巻回部からワイヤが巻き出されて、従動プーリが回転すると共に、前記スライダが水平方向に移動し、前記第1ロック手段が前記スライダを移動させないようにロックした状態では、駆動ドラムの回転により、一方の前記巻回部にワイヤが巻き取られると共に他方の前記巻回部からワイヤが巻き出されて、前記2つのプーリが回転して、前記移動プーリの回転により、前記索条ドラムが回転して、前記指標の索条の巻取・巻出が実行される。
【0010】
かかる態様によれば、指標の昇降・停止と、表示器の水平移動を1つのモータにより行うことができるので、コストダウンを図り得る。
【0011】
ここで、ワイヤの代わりに、たとえば、タイミングベルトを採用することも考えられる。しかし、タイミングベルトの市販品の長さには限界があるので、たとえば、棚の水平方向の長さが、たとえば、10メートル近くなるような場合には、タイミングベルトを採用するのが難しい。また、長いタイミングベルトを用いた場合には、タイミングベルトの重量が大きくなると共に、駆動時にタイミングベルトが大きく伸張する。そのため、システムの大型化や精度の低下が避けられない。
これに対し、前記態様では、ワイヤにより動力を伝達するので、横に長い棚であってもスライダの移動が可能である。また、ワイヤはタイミングベルトに比べて大幅に軽量、かつ、径小であるので、システムの大幅な小型化を図り得る。さらに、ワイヤは、タイミングベルトに比べ伸縮率が小さく、かつ、径小であるので、精度の低下を防止することができる。
【0012】
しかも、無端状のワイヤをプーリで回転させるものではないから、ワイヤと駆動ドラムとの間に滑りが生じるおそれもない。
【0013】
本発明において、前記駆動ドラムを回転自在に支持すると共に、前記駆動ドラムおよびモータを当該駆動ドラムの軸方向に移動自在に支持するドラム台と、前記駆動ドラムが正転方向に回転した場合に前記ドラム台が前記軸方向の第1の方向に所定量移動するように規制すると共に、前記駆動ドラムが前記正転方向とは逆の逆転方向に回転した場合に前記ドラム台が前記軸方向の第2の方向に所定量移動するように規制して、前記ワイヤの巻取位置および巻出位置が一定となるように制御するネジ手段とを更に備えている。
【0014】
かかる態様によれば、駆動ドラムが回転した場合に前記ドラム台が前記軸方向に所定量移動するように規制されているので、ワイヤが概ね同一の位置から巻出・巻取されるから、ワイヤが斜めにならない。そのため、スライダの停止精度がより一層向上する。
【発明を実施するための最良の形態】
【0015】
実施例1:
以下、本発明の実施例を図面に従って説明する。
図1〜図4は実施例1を示す。
図1に示すように、棚1は複数の間仕切りで仕切られており、たとえば、機械部品などからなる物品が収納されている。
棚1には、前記ピッキングを行う物品の収納されたロケーション(場所)と数を表示するためのピッキングシステムが設けられている。作業者は、前記ピッキングシステムにより指示されたロケーションおよび数に基づいて、所定種類の物品を所定個数だけ棚1から取り出すことでピッキングを行う。
【0016】
全体構成:
前記ピッキングシステムは、レール2、スライダ3および指標5を備えている。
前記レール2は、棚の上端部に略水平方向Yに沿って、かつ、棚1の間口1aに沿って敷設されている。
【0017】
前記スライダ3は、レール2に沿って水平方向Yに移動する。図2に示すように、スライダ3には、ピッキング数を表示する表示器4が取り付けられている。表示器4としては、たとえば、7セグメントLED(Light Emitting Diodes)や液晶表示器を採用することができる。
前記指標5は、スライダ3からヒモ(索条)Bを介して上下方向Zに垂れ下がり、物品をピッキングするロケーションを指し示す。
本システムは、たとえば、パーソナルコンピュータなどからなる図示しない制御装置によって制御される。
【0018】
ワイヤWの取りまわし:
スライダ3は、ワイヤWによって水平方向Yに移動される。図1に示すように、ワイヤWはレール2に沿って水平方向Yに張設されている。
【0019】
図3Aは本システムの概略平面図、図3Bは本システムの概略正面図である。
図3Aに示すように、ワイヤWは、棚1の一方の端部に設けられた駆動ドラム20の第1巻回部20aに巻回され、該棚1(図1)の他方の端部に設けられた従動プーリ21を介して再び駆動ドラム20の第2巻回部20bに巻回されている。なお、ワイヤWは有端であり、両端部が駆動ドラム20にそれぞれ固定されている。なお、前記駆動ドラム20は、駆動モータ(駆動装置)Mにより回転駆動される。
【0020】
前記スライダ3には、移動プーリ30が搭載されている。移動プーリ30には、前記ワイヤWが巻回されている。
なお、ワイヤWの取りまわしをスムースに行う為、ワイヤWの方向転換を行う箇所等には、補助プーリ24がそれぞれ設けられている。
【0021】
スライダ3:
前記移動プーリ30は、シャフト31を中心に、回転自在にスライダ3に取り付けられている。前記スライダ3には、前記レール2に案内される車輪35が設けられており、スライダ3は車輪35により、レール2に沿って水平方向Yに移動可能に設定されている。
【0022】
前述のように、移動プーリ30にはワイヤWが巻回されているので、移動プーリ30の回転をロックすると、ワイヤWの水平方向Yの移動によりスライダ3をレール2に沿って水平方向Yに移動させることができる。一方、スライダ3をレール2にロックすると、ワイヤWにより移動プーリ30が回転される。
【0023】
索条ドラム32:
図3Bに示す前記シャフト31の両端には、一対の索条ドラム32が固定されている。索条ドラム32には、ヒモBの一端が固定されていると共に、該ヒモBが巻回されている。ヒモBの他端には、前記指標5が固定されている。前記ワイヤWにより、移動プーリ30が回転されると、シャフト31を介して両端の索条ドラム32が回転され、索条ドラム32に巻回されているヒモBの巻出・巻取が行われる。
【0024】
ロック手段41,42:
図4は、図3AにおけるIV-IV 線断面図である。
図4に示すように、スライダ3には、移動プーリ30の回転とスライダ3の水平移動を選択的にロックするロック手段41,42が設けられている。第1ロック手段41および第2ロック手段42は、スライダ本体34に揺動自在に設けられた揺動アーム46と、該揺動アーム46の両端に設けられた第1および第2ブレーキシュー43,45を備えている。前記シャフト31には、ブレーキドラム44が固定されている。
【0025】
揺動アーム46が、図示しないアクチュエータによって回動中心Oを中心に回動し、第1ブレーキシュー43がレール2の側面を押し付けることにより、スライダ3がレール2に対してロックされる。かかる場合には、第2ブレーキシュー45はブレーキドラム44から離れている。
一方、揺動アーム46が前記揺動中心Oを中心に逆方向に回動すると、第2ブレーキシュー45がブレーキドラム44を押し付け移動プーリ30の回転がロックされる。かかる場合には、第1ブレーキシュー43はレール2から離れている。
【0026】
駆動ドラム20:
図3Aに示すように、レール2の一方の端部には、ドラム台11が設けられている。ドラム台11は、駆動ドラム20を回転自在に支持している。ドラム台11は、ドラムスライダ13に固定されている。一方、レール2の端部には、ドラムフレーム14が固定されており、ドラムフレーム14には、ドラムガイド12が設けられている。ドラムガイド12は、前記ドラムスライダ13を介してドラム台11を軸方向Xに摺動自在に支持すると共に案内する。
【0027】
ドラムフレーム14には、駆動ドラム20の回転軸に沿って設けられた雄ネジ15が設けられている。駆動ドラム20には、前記雄ネジ15に螺合する雌ネジ16が形成されている。前記雄ネジ15および雌ネジ16は、駆動ドラム20が軸方向Xに移動するように規制して、前記ワイヤWの巻取位置および巻出位置が一定となるように制御するネジ手段を構成している。
【0028】
すなわち、駆動ドラム20が正回転して、第1巻回部20aが巻出回転し、かつ、第2巻回部20bが巻取回転した場合には、前記ネジ手段により、ドラム台11が軸方向Xの第1の方向D1にネジ手段のピッチに応じて所定量移動するように規制される。一方、駆動ドラム20が逆回転して、第1巻回部20aが巻取回転し、かつ、第2巻回部20bが巻出回転した場合には、前記ネジ手段により、ドラム台11が軸方向Xの第2の方向D2に所定量移動するように規制される。なお、前記ネジ手段のネジ山のピッチは、ワイヤWの巻取・巻出位置が概ね一定となるピッチに設定されている。たとえば、前記ネジ山のピッチは、ワイヤWの径に近似した値に設定されている。
【0029】
本システムのピッキング指示動作:
図1に示すように、指標5は二点鎖線で示す上昇端に位置している。
前記制御装置は、ピッキングを行う物品のロケーションおよび数に従い、以下のように本システムの制御を行う。
【0030】
まず、当該物品が収納されている水平方向Yのロケーションに向ってスライダ3を移動させる。すなわち、図4に示す揺動アーム46が回動し、第2ロック手段42の第2ブレーキシュー45がブレーキドラム44に接触することにより、移動プーリ30が回動しないようにロックする。図3Aの移動プーリ30が回転しないようにした状態では、索条ドラム32が回転せずに、駆動ドラム20および従動プーリ21が回転することにより、指標5が上昇端に上昇したままの状態で、ワイヤWによりスライダ3が水平方向Yに移動される。
【0031】
スライダ3がピッキングを行う物品の収納されたロケーションの上方まで移動されると、図4の第2ロック手段42が解除されると共に第1ロック手段41がロックされ、スライダ3が所定のロケーションの上方位置で停止すると共に、指標5が下降を始める。
【0032】
すなわち、前記揺動アーム46が回動することで、第2ロック手段42の第2ブレーキシュー45がブレーキドラム44から離れると共に、第1ロック手段41の第1ブレーキシュー43がレール2に接触し、スライダ3が停止される。第1ロック手段41がスライダ3を移動させないようにした状態では、駆動モータMの駆動により、駆動ドラム20が回転すると、ワイヤWにより、従動プーリ21および移動プーリ30が回転する。移動プーリ30が回転することで、シャフト31を介して索条ドラム32が回転し、指標5のヒモBが巻き出される。
一方、図2に示す表示器4には、当該ピッキングを行う物品の個数が表示される。
【0033】
作業者が、指示されたロケーションおよび個数に基づいてピッキングを行った後、スライダ3に所定の操作を行うと、駆動モータMが逆回転し、ヒモBが巻き取られて、指標5が上昇端まで上昇する。その後、揺動アーム46が回動し、第2ロック手段42の第2ブレーキシュー45がブレーキドラム44に接触することにより、移動プーリ30が回動しないようにロックされ、ワイヤWの移動により、次のピッキングを行う物品が収納されている水平方向Yのロケーションに向ってスライダ3が移動される。
【0034】
なお、前述の実施例では、第1および第2ロック手段41,42の一例として、揺動アーム46を回動させることにより、ロック状態を選択的に切り換えることとしたが、移動プーリ30が回転しない状態とスライダ3を移動させない状態とを行い得る機構であればどのような機構であってもよい。
【0035】
実施例2:
図5〜図7は実施例2を示す。
図5に示すように、本実施例2では、一対の棚1,1の背面同士が互いに接するように設置してある。したがって、棚の間口1a,1aは該棚の奥行方向Xの両面、すなわち、前面1Fおよび背面1Bにそれぞれ位置している。
棚1の近傍には、ピッキング情報を表示する表示器4aが、棚1の前面1Fおよび背面1Bにそれぞれ設けられている。
【0036】
レール2;
レール2は、棚1の上端部において、略水平方向Y、すなわち、棚1の間口1aの並ぶ方向に沿って敷設されている。レール2は、前記一対の棚1,1の奥行方向Xの概ね境界部分、すなわち、棚1,1の奥行方向Xの概ね中央に設けられている。
【0037】
アーム52;
スライダ3Aは、その上部にアーム52を備えている。図6に示すように、アーム52の一方の端部は、旋回部51の上部に固定されている。前記スライダ3Aには旋回軸50が固定されており、旋回部51は旋回軸50を中心に回動自在に設けられている。
【0038】
アーム52の他端部には、案内パイプ54が下方に向って延設されている。アーム52の両端部には、案内プーリ61,62が回転自在に設けられている。スライダ3Aの索条ドラム32に巻回されたヒモBの端部は、前記案内プーリ61,62を介してアーム52に沿うように案内され、案内パイプ54内を通り、該案内パイプ54の下端部に垂下された指標5に固定されている。
したがって、索条ドラム32の回転により、該索条ドラム32に巻回されているヒモBの巻出・巻取が行われることで、アーム52の案内プーリ61,62を介して指標5が上下方向Zに移動可能される。
なお、案内パイプ54の長さは、指標5が上昇し該案内パイプ54の下端部に接触した上昇端の位置において、前記指標5の下端部が棚1の上端部よりも高くなるように設定されている。
【0039】
アーム52の旋回機構;
前記旋回部51には旋回ギヤ53が固定されている。一方、図5および図7に示すように、前記レール2の一方の端部には駆動ギヤ73が設けられている。駆動ギヤ73の上部には、該駆動ギヤ73を回転させるための第2駆動モータM2が設けられている。
【0040】
図7に示すように、スライダ3Aが略水平方向Yに移動し、駆動ギヤ73の設けられた棚1の一方の端部に達すると、旋回ギヤ53と駆動ギヤ73とが噛み合うと共に、該スライダ3Aの移動が停止される。その後、スライダ3Aが停止した状態で、第2駆動モータM2が駆動ギヤ73を回転させると、該駆動ギヤ73により旋回ギヤ53が回動され、アーム52が矢印で示すように180°回動される。
【0041】
なお、本実施例2では、図7に示すように、駆動ドラム20が略水平方向Yに沿って設けられているが、駆動ドラム20の駆動モータ、ドラムスライダおよびワイヤWの方向転換用のプーリ等については、説明の簡略化のためにその図示を省略している。
その他の構成は、実施例1と同様であり、同一部分または相当部分に同一符号を付して、その詳しい説明および図示を省略する。
【0042】
ピッキング指示動作:
初期状態において、図5に示すように、前記アーム52は、たとえば、前面1F(一方の面)に指標5が位置するように、略水平方向Yに概ね直交する方向に設定されている。
【0043】
作業者が所定の操作を行うと、ピッキングを行う物品が収納されている水平方向Yのロケーションに向ってスライダ3Aを移動させる。スライダ3Aがピッキングを行う物品の収納されたロケーションの上方まで移動されると、該スライダ3Aが所定のロケーションの上方位置で停止すると共に、図6の案内プーリ61,62を介して、指標5が棚1の前面1Fに沿って下降を始める。図5の二点鎖線で示すように、指標5は、当該ピッキングを行う物品が入れられた仕切りを指し示す位置で停止する。一方、表示器4aには、当該ピッキングを行う物品の個数が表示される。
【0044】
作業者が、指標5によって指示されたロケーションと、表示器4aに表示された個数に基づいてピッキングを行った後、スライダ3に所定の操作を行うと、駆動モータMが逆回転し、ヒモBが巻き取られて、指標5が上昇端、すなわち、前記案内パイプ54の下端部まで上昇する。その後、次のピッキングを行う物品が収納されている水平方向Yのロケーションに向ってスライダ3が移動される。
【0045】
アーム52の回動動作:
作業者がピッキングを繰り返し、前面1Fの間口1aからのピッキングが終了すると、次に、背面1Bの間口1aからのピッキングが行なわれる。
図5の指標5が上昇端まで上昇した後、スライダ3Aが駆動ギヤ73の設けられた棚1の端部に向って移動し、図7に示すように、スライダ3Aの旋回ギヤ53と駆動ギヤ73とが噛み合う位置で停止する。その後、第2モータM2が駆動ギヤ73を回転させることにより、旋回ギヤ53が回動され、矢印で示すように、アーム52が実線で示す初期状態から、二点鎖線で示す反転状態まで180°回動される。前記アーム52の回動(反転)により、該アーム52の先端部に設けられた指標5が、棚1の前面1F側から背面1B側に移動される。
【0046】
なお、図6に示すように、ヒモBが索条ドラム32に巻き戻されることで、指標5は、前記案内パイプ54の下端部に接触する上昇端まで上昇し、案内パイプ54の下端部に固定される。そのため、アーム52が回動しても、指標5が不用意に揺動するのを防止することができる。
【0047】
その後、図5に示す前記背面1Bの間口1aにおいて、スライダ3Aが略水平方向Yに移動されると共に、所定のロケーションの上方位置で停止され、指標5が下降される。一方、表示器4aには、当該ピッキングを行う物品の個数が表示される。
棚1の背面1Bに移動した作業者は、指標5および表示器4aによって指示されたロケーションおよび個数に基づいて背面1Bのピッキング作業を行う。
【0048】
作業者がピッキングを繰り返し、背面1Bでのピッキング作業が終了すると、指標5が上昇端まで上昇し、図7に示すスライダ3Aが駆動ギヤ73に向って略水平方向Yに移動する。駆動ギヤ73が逆回転することにより、アーム52が逆方向に180°回転され、図7の実線で示す初期状態に戻る。
【0049】
なお、前記実施例2では、間口1aが前面1Fと背面1Bの両面にある棚であればよく、必ずしも2台の棚を背中合わせに設置する必要はない。
また、奥行方向Xに仕切りのない棚を用いてもよい。
【0050】
さらに、前記ピッキング情報としては、ピッキングを行う個数の他に、たとえば、棚の列No. や段No. などを表示してもよい。さらに、棚に引出し等を設け奥行方向Xに複数種類の部品を収納した場合には、奥No. を表示するようにしてもよい。
また、指標5にピッキング情報を表示する表示器を設けてもよい。
さらには、アーム52が回動した際に、アーム52が不用意な角度で停止し、下降する指標5が棚1の間口1aに接触することがないように、アーム52を棚1の略水平方向Yに略直交する位置に固定するロック機構を設けてもよい。
また、レール2の両端に駆動ギヤ73を設けてもよい。
また、前述の実施例2では、駆動ギヤ73の回転により、旋回ギヤ53を介してアーム52の旋回を行うこととしたが、アーム52の旋回機構としては、該アーム52を旋回し得る機構であればよく、前述のギアを用いる方法の他に、たとえば、図8に示すように、第2モータM2によって回転駆動される旋回ロッド74を設け、該旋回ロッド74が直接アーム52に接触することで、該アーム52の旋回を行うようにしてもよい。
【産業上の利用可能性】
【0051】
本発明は、棚に収納された物品のピッキングに適用することができる。
【図面の簡単な説明】
【0052】
【図1】本発明の実施例1にかかるピッキングシステムを示す概略斜視図である。
【図2】同システムの概略正面図である。
【図3】図3Aは同システムの駆動装置を示す概略平面図、図3Bは同駆動装置の概略正面図である。
【図4】同駆動装置の概略断面図である。
【図5】本発明の実施例2にかかるピッキングシステムを示す概略斜視図である。
【図6】同スライダを示す概略断面図である。
【図7】同スライダの旋回方法を示す一部を破断した概略平面図である。
【図8】スライダの旋回方法の変形例を示す一部破断した概略側面図である。
【符号の説明】
【0053】
1:棚
1a:間口
2:レール
3,3A:スライダ
5:指標
11:ドラム台
20:駆動ドラム
21:従動プーリ
30:移動プーリ
32:索条ドラム
41:第1ロック手段
42:第2ロック手段
B:ヒモ(索条)
M:駆動モータ(駆動装置)
W:ワイヤ
Y:棚の間口が並ぶ方向
【特許請求の範囲】
【請求項1】
棚に収納した物品をピッキングするロケーションを表示するためのピッキングシステムであって、
棚の上端部に水平方向に沿って、かつ、棚の間口が並ぶ方向に沿って敷設されたレールと、
前記レールに案内されて棚の上部を水平方向に移動するスライダと、
前記スライダから索条を介して垂れ下がり、物品をピッキングするロケーションを指し示すための指標と、
前記スライダの水平移動と前記指標の昇降とを選択的に行うための駆動装置とを備えたピッキングシステム。
【請求項2】
請求項1において、前記駆動装置は、1つの駆動モータにより前記指標の水平移動と、前記指標の昇降・停止を可能にした駆動装置であって、
一対の巻回部を有しモータに取り付けられた駆動ドラムと、
該駆動ドラムの回転で回転する従動プーリと、
前記スライダに回転自在に取り付けられた移動プーリと、
前記駆動ドラムの一方の巻回部から前記2つのプーリの外周に巻回され、更に前記駆動ドラムの他方の巻回部まで架け渡されたワイヤと、
前記移動プーリの回転で前記索条を巻き取り、巻き出す索条ドラムと、
前記スライダが前記レールに対し相対移動しないようにロックする第1ロック手段と、
前記移動プーリが回転しないようにロックする第2ロック手段と、
前記第2ロック手段が、前記移動プーリが回転しないようにした状態では、前記索条ドラムが回転せずに、前記駆動ドラムの回転により、一方の前記巻回部にワイヤが巻き取られると共に他方の前記巻回部からワイヤが巻き出されて、従動プーリが回転すると共に、前記スライダが水平方向に移動し、
前記第1ロック手段が前記スライダを移動させないようにロックした状態では、駆動ドラムの回転により、一方の前記巻回部にワイヤが巻き取られると共に他方の前記巻回部からワイヤが巻き出されて、前記2つのプーリが回転して、前記移動プーリの回転により、前記索条ドラムが回転して、前記指標の索条の巻取・巻出が実行されるピッキングシステム。
【請求項3】
請求項2において、前記駆動ドラムを回転自在に支持すると共に、前記駆動ドラムおよびモータを当該駆動ドラムの軸方向に移動自在に支持するドラム台と、
前記駆動ドラムが正転方向に回転した場合に前記ドラム台が前記軸方向の第1の方向に所定量移動するように規制すると共に、前記駆動ドラムが前記正転方向とは逆の逆転方向に回転した場合に前記ドラム台が前記軸方向の第2の方向に所定量移動するように規制して、前記ワイヤの巻取位置および巻出位置が一定となるように制御するネジ手段とを更に備えたピッキングシステム。
【請求項1】
棚に収納した物品をピッキングするロケーションを表示するためのピッキングシステムであって、
棚の上端部に水平方向に沿って、かつ、棚の間口が並ぶ方向に沿って敷設されたレールと、
前記レールに案内されて棚の上部を水平方向に移動するスライダと、
前記スライダから索条を介して垂れ下がり、物品をピッキングするロケーションを指し示すための指標と、
前記スライダの水平移動と前記指標の昇降とを選択的に行うための駆動装置とを備えたピッキングシステム。
【請求項2】
請求項1において、前記駆動装置は、1つの駆動モータにより前記指標の水平移動と、前記指標の昇降・停止を可能にした駆動装置であって、
一対の巻回部を有しモータに取り付けられた駆動ドラムと、
該駆動ドラムの回転で回転する従動プーリと、
前記スライダに回転自在に取り付けられた移動プーリと、
前記駆動ドラムの一方の巻回部から前記2つのプーリの外周に巻回され、更に前記駆動ドラムの他方の巻回部まで架け渡されたワイヤと、
前記移動プーリの回転で前記索条を巻き取り、巻き出す索条ドラムと、
前記スライダが前記レールに対し相対移動しないようにロックする第1ロック手段と、
前記移動プーリが回転しないようにロックする第2ロック手段と、
前記第2ロック手段が、前記移動プーリが回転しないようにした状態では、前記索条ドラムが回転せずに、前記駆動ドラムの回転により、一方の前記巻回部にワイヤが巻き取られると共に他方の前記巻回部からワイヤが巻き出されて、従動プーリが回転すると共に、前記スライダが水平方向に移動し、
前記第1ロック手段が前記スライダを移動させないようにロックした状態では、駆動ドラムの回転により、一方の前記巻回部にワイヤが巻き取られると共に他方の前記巻回部からワイヤが巻き出されて、前記2つのプーリが回転して、前記移動プーリの回転により、前記索条ドラムが回転して、前記指標の索条の巻取・巻出が実行されるピッキングシステム。
【請求項3】
請求項2において、前記駆動ドラムを回転自在に支持すると共に、前記駆動ドラムおよびモータを当該駆動ドラムの軸方向に移動自在に支持するドラム台と、
前記駆動ドラムが正転方向に回転した場合に前記ドラム台が前記軸方向の第1の方向に所定量移動するように規制すると共に、前記駆動ドラムが前記正転方向とは逆の逆転方向に回転した場合に前記ドラム台が前記軸方向の第2の方向に所定量移動するように規制して、前記ワイヤの巻取位置および巻出位置が一定となるように制御するネジ手段とを更に備えたピッキングシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−119248(P2007−119248A)
【公開日】平成19年5月17日(2007.5.17)
【国際特許分類】
【出願番号】特願2006−214296(P2006−214296)
【出願日】平成18年8月7日(2006.8.7)
【出願人】(592127965)NKE株式会社 (28)
【Fターム(参考)】
【公開日】平成19年5月17日(2007.5.17)
【国際特許分類】
【出願日】平成18年8月7日(2006.8.7)
【出願人】(592127965)NKE株式会社 (28)
【Fターム(参考)】
[ Back to top ]