
プローブ検出システム
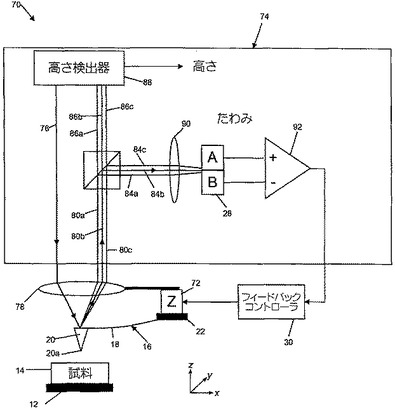
走査型プローブ顕微鏡とともに使用するプローブ検出システム(74)は、高さ検出システム(88)およびたわみ検出システム(28)の両方を備える。試料表面が走査される際、顕微鏡プローブ(16)から反射された光が2つの成分に分割される。第1の成分(84)は、たわみ検出システム(28)によって分析され、走査時に平均のプローブたわみを実質的に一定に維持するフィードバックシステムで使用される。第2の成分(86)は、高さ検出システム(88)によって分析され、固定の基準点上方のプローブの高さの指示が得られ、それにより試料表面の画像が得られる。このような複式検出システムは、フィードバックシステムが画素位置間でプローブ高さを調整するために必要な速度で応答することができない、高速の走査アプリケーションで使用するのに特に適する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プローブ顕微鏡技術の分野に関し、より詳細には、試料表面との関連で顕微鏡プローブの位置を監視するために使用される検出システムに関する。
【背景技術】
【0002】
走査型プローブ顕微鏡(SPM)の基礎となる原理は、試料の画像を生成するためにナノメートル規模のプローブ先端で試料表面の機械的走査を実行するというものである。画像中の特徴は、先端と試料の間の相互作用の変動の結果生じる。
【0003】
SPMの特定の例は、原子間力顕微鏡(AFM)である。原子間力顕微鏡では、試料とプローブの鋭利な先端の間の力の相互作用が観察される。典型的なAFMのプローブは、基部で支持台に固定され、その反対側の(自由)端に先端を有する、非常に小型のカンチレバーを備える。プローブ先端が試料に近づけられると、試料と先端の間に相互作用力が発生する。先端が運動している場合、例えば振動している場合は、相互作用力がその運動を何らかの形で変化させる。先端が静止している場合、力は、試料表面に対して先端を変位させる。
【0004】
走査の過程で、先端と試料表面間の相互作用の強さは、プローブ先端の下の表面の特性が変化すると変わる。3軸の高解像度走査装置は、通例、試料とプローブの間に相対的な運動を発生させ、試料および/またはプローブ支持台のどちらかを駆動する。プローブ先端の位置および/または運動のいずれかに対する相互作用力の影響が走査中に監視される。標準的なAFM動作では、相互作用力の強さは、一定に保たれる。すなわち、プローブに対する相互作用力の影響が観察され、変化があると、その変化に応答してフィードバックシステムが試料とプローブ基部の分離を調整するように動作して、観察されるパラメータを所定の値、すなわち設定点に戻す。この調整に関連するデータ(従来は垂直方向または「z」方向の動き)が収集され、そのデータが使用されて、試料表面の一領域にわたる試料の画像を構築することができる。
【0005】
上記のように、基部と試料の分離に行われる調整は、従来は、垂直方向すなわちz方向で行われ、試料表面はx、y面で走査される。本明細書ではこの慣習に従うが、顕微鏡は、試料が水平面方向に配置されず、したがってフィードバック調整が垂直方向でないように構成されることも可能であることを念頭に置かれたい。すなわち、用語「垂直方向」は、単に、試料面に対して直角、またはそれと同等に試料表面が走査される面に対して直角の意味と理解されたい。従来、この方向は、図1に示すデカルト軸で示すようにz方向と呼ばれる。
【0006】
AFMで形成される画像の解釈は、ある程度、調査対象の表面の性質に依存する。一般には表面の形状が画像に最も大きく寄与し、走査時には試料の高さがプローブによって細密に追従されるが、表面の疎水性や親水性、粘弾性等の他の特性も寄与する場合がある。プローブおよび顕微鏡はさらに、適切な相互作用力を介して、磁場や電場等の他の試料特性を測定するように構成されることもできる。
【0007】
AFMは、各種の画像化モードで動作するように設計することができる。コンタクトモードでは、プローブは、試料と実質的に常時接触した状態を保つ。ダイナミックモードでは、プローブが振動させられ、試料と全く接触しないか、または間欠的に接触する。
【0008】
表面の調査に静止した先端が使用される場合は、相互作用力がカンチレバーの湾曲またはたわみに及ぼす効果を使用して、走査中の先端の位置が監視される。先端と表面の間の相互作用力が変化すると、先端は、表面の方に引っ張られるか、または表面から押し離される。この先端の動きがプローブのカンチレバー部に伝達され、カンチレバーは、それに応じてその長さにわたって湾曲する、またはたわむ。この構成のAFMは、当技術分野でよく知られるように、光てこシステムや他のたわみ検出器等の高感度検出器でカンチレバーのたわみを測定するように設定される。この文脈におけるたわみとは、一般にカンチレバーの湾曲の指示を得るために用いられるプローブの上部表面の傾斜を言う。
【0009】
あるいは、プローブは、プローブの共振振動数の1つまたはその近傍で垂直方向に振動させることもできる。試料とプローブ間の相互作用の変動がプローブの運動に影響する。詳細には、この振動の振幅、位相、および共振振動数が監視されることができ、一定の平均相互作用を維持するためにプローブと試料の分離が調整される。
【0010】
AFMは、その動作モードに関係なく、種々の環境(空気、液体、または真空)内で多種多様な試料の原子スケールの画像を得るために使用することができる。一般に、AFMは、圧電アクチュエータ、光てこたわみ検出器、および、シリコン製造技術を使用して製造される非常に小型のカンチレバーを用いる。その高解像度と多用途性により、AFMは、工業検査、半導体製造、生物学的研究、材料科学、およびナノリソグラフィ等の種々の分野で応用されている。
【0011】
用語「プローブ」、「先端」、および「カンチレバー」は、この分野ではしばしば同義で使用されるが、本発明の説明のために、これらの用語に、より厳密な定義が必要である。「先端」(またはより文脈に適切な場合は「プローブ先端」)は、カンチレバーの梁部の自由端に配置された、多くの場合円錐または角錐型の3次元構造を言う。先端は、調査対象の表面との最も近い相互作用点である点に向かって次第に細くなる。カンチレバーは、先端を除いた梁部自体であり、一端で先端を支持し、他端は顕微鏡装置によって保持される。カンチレバーと先端を合わせてプローブと呼ぶ。
【0012】
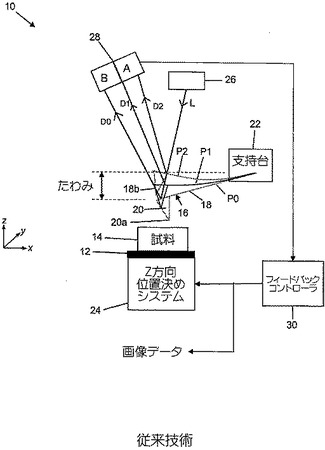
図1に、従来のAFM10の基本構成要素を示す。この従来技術によるAFM10は、可動式の台12を備え、台12の上に、プローブ16で調査される試料14が載せられる。プローブ16は、カンチレバーの梁部18および先端20を備え、先端20は、微小点20aに向かって先細になり、カンチレバーの梁部18の一端に向かって位置する。カンチレバーの梁部18の他方の端は、支持台22に固定される。z方向位置決めシステム24が台12に接続され、z方向位置決めシステム24は、台12をプローブ16に向かう方向およびプローブ16から離れる方向(z方向)に移動するように動作することが可能な圧電駆動体を備える。さらなる駆動体(図示せず)が支持台22、台12、またはその両方に接続され、試料面(x、y)上で試料14とプローブ16の間の相対的な運動を提供するように動作可能である。光源26がビームLを発するように構成され、ビームLは、先端20が取り付けられている位置のカンチレバーの梁部18の上部表面(後部)18bに誘導される。カンチレバーの後部18bから反射された光は、一般には分割フォトダイオード28である位置敏感型検出器(PSD)に伝播し、フィードバック信号が生成される。検出器28の出力は、フィードバックコントローラ30を介してz方向位置決めシステム24に接続される。
【0013】
PSDからのフィードバック信号を処理して、プローブのたわみ、振幅、位相、または他のパラメータ等の数量を抽出することができる。説明を簡略にするために、この従来技術のAFMは、プローブのたわみに基づくフィードバックを使用してコンタクトモードで動作するものとして説明する。
【0014】
プローブ16は、一般に(AFMの場合)シリコンまたは窒化シリコンで作製される。通例、カンチレバー18は、長さ100〜200マイクロメートル前後、幅20〜50マイクロメートル前後、厚み0.5マイクロメートル前後であるが、無論、この大きさは用途に応じて変えることができる。形状も変えることができるが、通例は矩形または三角形であり、後者の場合は先端20が三角形の頂点にある。先端20は、典型的にはその基部で5マイクロメートルであり、高さが3〜10マイクロメートル、端部の曲率半径が10〜20ナノメートルである。使用時には、先端20の端にある微小点20aが試料の方に向けられる。
【0015】
試料の画像を撮影する際、従来技術のAFM10は次のように動作する。z方向位置決めシステム24を使用して、初めに、カンチレバー18が所定レベルまでたわむまで先端20が試料14に向けて動かされる。例えば図1でプローブの輪郭P1で示すこの所定のカンチレバー18のたわみの度合いが、フィードバックコントローラ30の設定点となる。
【0016】
カンチレバー18のたわみは、光ビームLおよび検出器28を使用して監視される。検出器28は、その長さに沿って、独立した検出器領域AおよびBに分割される。検出器からの出力信号は、領域Aを照明する光の強度と領域Bを照明する光の強度の差である。したがって、検出器から出力される強度差から、カンチレバーのたわみの指示が得られる。検出器28は、カンチレバー18が位置P1(設定点)まで湾曲した時にカンチレバーの後部18bに入射する光ビームLが経路D1に沿って反射され、領域AとBに実質的に等しく入射するように配置される。すなわち、lA−lB≒0であり、lAおよびlBはそれぞれ領域AおよびBを照明する光の強度を表す。lAおよびlBの正確な値は調整されることができ、その値が使用されてたわみの設定点の位置を識別する。
【0017】
次いで、試料14の表面上で先端20が走査され、通例はラスタパターンに従う。先端20が、一段高くなった表面の部分に遭遇すると、表面を追跡する先端20は、さらに上方に移動させられる。それにより、プローブ16がたわみを、例えば位置P2まで増す。プローブ16がこの位置にある時、光ビームLと、カンチレバーの後部18bで定義される表面との間の入射角が変わる。光ビームLは、そのため別の経路D2に沿って反射され、したがって、検出器の領域Bよりも領域Aの方により完全に入射する。すなわち、検出器28の2つの部分に入射する光の強度の差lA−lBが、以前の(設定点の)値から変化している。したがって、強度差の値からカンチレバーのたわみの指示が得られ、重要な点として、カンチレバーが設定点からどれほどたわんだかについての指示が得られることが理解できる。フィードバックコントローラ30は、プローブ支持台22の垂直方向の位置を試料14から離すように調整して、検出器28から受け取られるたわみ信号をその設定点(この例ではlA−lB≒0)に戻すように設定される。プローブ20は、したがって、P1として示す向きに維持される。
【0018】
逆に、先端20が、高さが一段低い表面部分に遭遇すると、設定点の湾曲の結果生じるカンチレバーの梁部18の偏寄力が先端20を下方に押し下げる。したがって、プローブ16は、たわみを減少させ、P0で示すような向きをとる。この向きでは、カンチレバーの後部18bへの光ビームLの入射角は、ビームLが経路D0に沿って反射されるような角度となる。したがって、検出器の領域Aよりも領域Bが完全に照明される。フィードバックコントローラ30は、再度プローブ支持台22の垂直方向位置を調整して試料14に向けて動かし、たわみ信号を設定点に維持する。したがって、プローブ20は、P1として示す向きに維持される。
【0019】
このようにして、顕微鏡システムのフィードバックは、先端の上方にあるカンチレバーの後部18bの傾斜角によって決まるプローブ16のたわみが、走査の過程を通じて実質的に一定に保たれることを保証する。それにより、先端を表面方向に引き寄せる、または表面から離れる方向に押し戻すように作用する、プローブ先端20と試料14の間の相互作用力も実質的に一定に保たれることが保証される。走査の進行に伴い、試料表面の高さの指示を提供するために、z方向位置決めシステムによって設定される支持台の垂直方向位置が測定される。走査過程でz方向位置決めシステム24によって行われる調整を使用して画像を構築する。
【0020】
近年のプローブ顕微鏡技術の進歩により、より短いデータ収集時間で、はるかに高速の走査を行う技術が開発されている。しかし、PCT特許出願WO02/063368およびWO2004/005844に記載されるようなこの新世代の顕微鏡では、AFMの構成要素自体によって課される制約が画像収集時間を制限することが次第に明らかになりつつある。
【0021】
上記の従来技術によるAFMの能力を参照すると、走査速度が上げられるのに従って、AFM動作の3つの明確な領域が区別されることができる。
上記の従来技術のAFMでは、先端20が試料表面上を連続的に移動されて、毎秒設定数の画素をカバーする。カンチレバーのたわみが監視され、フィードバックシステムが、プローブ16をあらかじめ設定された湾曲向きP1に維持するために、プローブ20と試料14間の垂直方向の分離を継続的に調整する。たわみの変化が検出され、次いでその変化に応答して垂直方向の分離が調整されることができる速度が、基本的に第1の(最も低速な)領域の走査速度の上限を設定する。正確な情報が収集されるためには、プローブと試料間の相互作用は、すべての画素位置にわたって一定でなければならない。すなわち、プローブと試料の分離は、プローブが1つの画素位置に対応する画像データを収集するのにかかる所要時間よりも短い所要時間で、すなわちラスタ走査がプローブを新しい画素位置に移動する前に、フィードバックシステムによって調整されなければならない。
【0022】
しかし、走査速度が上げられると、AFMは、フィードバックシステムが1つの画素領域内でプローブを設定されたたわみに戻すために十分な時間を持たない、第2の領域に入る。そのため、フィードバックシステムは、データ収集システムに対して遅れをとることになり、高さの情報(垂直方向の調整から得られる)が、当該画素位置におけるプローブ先端の真の高さ(およびしたがって試料の高さ)を反映しないことになる。各画素のサイズを増す(その場合画像の解像度が下がる)か、または走査の速度を落とす(その結果データ収集時間が増大する)ことにより、画素レートを下げなければならない。
【0023】
この制限の影響を低減するために、現在の研究は、フィードバックシステムの速度を向上させる、すなわち、第1の領域の範囲を実質的に拡大することに的を絞っている。ある手法は、2つのアクチュエータを使用して、z方向のカンチレバーの動きを提供する。第1のアクチュエータは、プローブアセンブリを駆動し、その結果制限のあるフィードバック応答が得られる。しかし、プローブと一体で、そのためプローブのみを移動させるように操作可能な第2のアクチュエータが提供される。この2次アクチュエータによって提供される動きの範囲は、第1のアクチュエータによって提供される動きの範囲よりも狭いが、プローブだけに影響するように使用されるので、その応答時間はより短い。このようにして、先端の高さの最初の調整は高速のアクチュエータを介して行うことができ、より低速で広範な調整が後に行われる。しかし、このように一体化された2次アクチュエータを有する入れ子構造のフィードバックシステムを使用しても、限定的な成功しか得られない。これは、一部には、フィードバックシステムの応答の解釈、およびしたがって先端の高さの判定の難しさによる。この情報がないと、表面の形状(または他の試料特性)を正確に推量することができない。
【0024】
これに代わる手法は、カンチレバーのたわみの多少の変動を許すモードでAFMを動作させるものである。このモードでは、カンチレバーのたわみが測定され、そのたわみに関連するデータが収集され、画像を構築するために使用される。したがって、このモードでの動作には、プローブのたわみから有用な情報を抽出するために、改良された測定技術が必要となる。下記でより詳細に説明するように、図1に示す従来技術の検出システムは、このモードで動作するように適合することができるが、そのように適合させると結果として計測情報が失われる可能性があり、これは多くの用途では満足のいくものではない。
【0025】
走査の速度がさらに上げられると、従来技術のAFMが完全に運用に適さない第3の領域に入る。一定の走査速度を超えると、カンチレバー18の過渡運動を引き起こすことが可能となる。すなわち、走査の過程で、先端が例えば試料の表面上の一段高い領域に遭遇すると、先端20は、カンチレバーの梁部の過渡運動を引き起こす可能性のある衝撃を供給する。プローブが表面の輪郭を追跡する際にこの過渡運動が存在すると、その運動は、所与のどの表面位置でもプローブの向きを変動させ、したがってプローブのたわみの監視から得られる情報を制限する。たわみがどのような形でもプローブの高さに関係しなくなる。これについては、J.P.Howard−KnightおよびJ.K.Hobbsにより「Video rate atomic force microscopy using low stiffness,low resonant frequency cantilevers(低剛性、低共振周波数片持梁を用いたビデオ速度の原子間力顕微鏡法)」、Appl.Phys.Lett 93 104101(2008)に記載され、下記でもより詳しく説明する。
【0026】
次いで図1の従来技術のシステムを再度参照すると、プローブの先端20が試料14の表面を追跡するのに伴い、走査線上の各点における先端20の垂直位置が試料14の形状の直接の指示を提供することが明らかである。したがって、厳密に言うと、基準レベル、例えば台12の表面、の上の先端の点20aの高さを測定すると、試料の高さの真の指示が得られる。
【0027】
第1の走査速度の領域では、図1の従来技術のシステムは、単に、領域Aに入射する光の強度と領域Bに入射する光の強度の差を監視する。たわみに特化した測定は行われない。従来技術のAFMは、たわみを一定に保つことだけを要求される点でゼロ化(nulling)システムである。プローブの高さの情報は、一定のたわみを保証するようにフィードバックシステムを操作する駆動体から得られる。
【0028】
次いで第2の走査速度の領域に移ると、従来技術によるシステムを使用して、領域Aに入射する光の強度と領域Bに入射する光の強度の差を測定できることが明白である。すなわち、AFMは、ゼロ化システムではなく、試料の調査の結果として直接データ(強度差)を抽出するシステムとして運用されることができる。そのようなデータは、無論、基準点(例えば台の表面)の上方のプローブの高さに関する情報が測定たわみデータから抽出できるという限りにおいて有用である。
【0029】
検出器の2つの部分間の強度差を測定することにより、明らかに、カンチレバーの後部18bから反射された光の方向の指示が得られる。反射の方向は、カンチレバーの後部18bが傾斜される角度に応じて決まる。小さい角度の場合、傾斜の変化は、カンチレバーの梁部18が回転される角度に等しく、したがって先端20における高さの変化に比例する。図1に示す位置P0、P1、およびP2は、分かりやすさを向上させるために大幅に誇張されており、多くの状況では、カンチレバーの梁部18は著しく湾曲することはなく、上記の小さな角度の概算で十分であることに留意されたい。また、たわみが測定される点は、カンチレバーの梁部の後部18b上の位置であり、先端の点20aの位置ではないことも明らかである。これら2つの点は、先端20の垂直方向の高さに等しい量だけ間隔が空いている。小さなたわみについては、これは、走査の間一定であると仮定することができる。
【0030】
上記の概算に関わらず、たわみを介した先端20の高さの測定は、実施が比較的容易である点でその支持に偏見がある。第1の走査領域では、プローブのたわみの変動を数量化する必要はない。ゼロ化システムでは、プローブのたわみは一定に保たれる。第2の走査領域でも、走査プローブ顕微鏡の動作は、従来、上記の仮定が有効である条件下にある。
【0031】
プローブのたわみを介したプローブの高さの測定に依拠することは普遍的と思われるにも関わらず、直接的な高さの測定の例が、米国特許第5,144,150号(Yoshizumi)、欧州特許第1892727号(Mitutoyo)、および欧州特許第2017599号(Mitutoyo)に記載される。これらの文書に記載される顕微鏡はすべて、干渉計を利用してプローブの高さに関する情報を抽出する。
【0032】
米国特許第5,144,150号は、コンタクトプローブを使用して、球面レンズやフレネル・レンズ等の湾曲表面の形状や、半導体のパターニングの形状を測定することを記載する。そのような表面を測定する際の問題は、例えばプローブが表面の特に高い領域を追跡する時にカンチレバーの梁部が湾曲すると、試料表面に許容できない圧力がかかる可能性があることである。その解決法は、試料表面が走査される際にカンチレバーの梁部の湾曲が実質的に一定に保たれるようにすることである。これは、カンチレバーの基部をいわゆる光学プローブに接続することによって実現される。光学プローブは、先端上方のカンチレバーの梁部の後部に焦点を結ぶ。先端が基部に対して移動すると(すなわち梁部が湾曲すると)、先端が光学プローブの焦点から離れる。そして、光学プローブが物理的に動かされて、先端を焦点に戻し、先端と光学プローブの分離を保つようにする。このいわゆる「自動焦点システム」は、光学プローブとカンチレバー基部の接続を通じて、カンチレバーが確実にその元の湾曲構成に戻るようにする。換言すると、光学フィードバックシステムが使用されて、カンチレバーを実質的に一定のたわみに維持する。この限りにおいて、この構成は、上記の一定相互作用モードで動作する従来技術のAFMシステムに似る。
【0033】
カンチレバーの梁部を動かしてたわみ位置を維持するために必要な垂直方向の距離から単にプローブのz位置を抽出する一定相互作用のAFMと異なり、米国特許第5,144,150号の顕微鏡は、干渉測定を用いて先端の後部の速度を直接測定する。その速度情報から、走査中の特定の点におけるプローブの高さが推定されることができる。プローブの速度は、先端の後部から反射されたレーザビームの参照ビームとの干渉によって測定される。ビームは、移動するプローブからの反射時にドップラー周波数シフトを起こす。このように干渉の測定を用いることにより、プローブのたわみに依存しないプローブの高さの指示、または関連するカンチレバーの梁部の高さの指示が得られる。
【0034】
しかし、米国特許第5,144,150号に記載される構成は、走査速度に課されるどの制限も克服しない。この構成は第1の領域でしか運用することができない。カンチレバーのたわみを維持するフィードバックシステムは、たわみの変化に瞬時に反応することができず、そのため走査速度が制限され、画像の画素を収集する際にかかる時間が、自動焦点フィードバックシステムの応答時間よりも長くなる。この従来技術のシステムが、プローブの傾きに関係なく干渉測定システムのレーザビームがプローブの後部から反射されてその入射経路に沿って戻ることを保証する第2のフィードバックシステムを備えることは、注目に値する。すなわち、これら2つのシステムのうち低速の方のシステム応答時間で走査速度が制限される。
【0035】
Mitutoyoによる2つの出願、欧州特許第1892727号および欧州特許第2017599号は、プローブ顕微鏡を操作する際の精度、およびしたがって画像の解像度の向上に関する。これは、干渉測定を使用して、固定された基準点に対するプローブの高さの直接の測定値を抽出することによって達成される。一実施形態では、プローブの後部から反射されたビームが参照ビームと干渉し、経路差が抽出される。これにより、走査装置で発生する運動エラーの問題が克服される。プローブ先端のz方向の運動は、純粋に試料表面の形状から生じる。走査装置のエラーが生じるとプローブを湾曲させるが、それが直接の高さの測定に影響することはない。
【0036】
欧州特許第1892727号に記載されるシステムは、フィードバックシステムは一切使用しない。すなわち、プローブの過度の湾曲を防止するための調整は行われず、したがって、このシステムは、非常に平坦な表面の走査に限定される。
【0037】
欧州特許第2017599号は、フィードバックが実施される、以前のMitutoyoの出願に記載される装置を発展させた装置を記載する。このフィードバックシステムは、単一のセンサを使用してプローブの接触力(フィードバック信号)と変位(高さ)の両方を検出する点で、前述のフィードバックAFMの従来技術と比べて簡略化されている。走査時に、小さな垂直方向の高周波振動(ディザー)がプローブに与えられる。この振動の振幅が、相互作用力の強さについての情報を提供する。したがって、干渉計で測定された直接の高さ信号は、ディザーから生じた高周波成分と重畳された、試料の高さの変動に対応する低周波成分を含む。信号処理時に、フィルタが使用されて2つの成分を分離する。高周波成分の振幅を一定に保つために、プローブの基部の高さが調整される。しかし、この構成は、走査速度に課される制限はどれも克服できない。正確なデータ結果は、フィードバックシステムが表面の高さの変化に応答するのに十分な時間を有する場合、すなわち、画像データの収集点間でディザーの振幅が一定に保たれた場合にのみ得ることができる。より高いレートでデータを収集することはできない。これは、第1には、振幅を測定するには複数回の周期(この例では5〜10回)にわたって振動を監視することが必要であり、第2には、z方向駆動システムには、振幅を設定値に回復するためにプローブ位置を調整する時間を与えなければならないためである。したがって、この装置も、第1の走査領域でしか運用することができない。
【0038】
要約すると、従来技術のプローブ顕微鏡は、上記で明らかにした第1の(低速の)走査領域以外での動作には適さないか、または適用が比較的平坦な試料に限定されるかのいずれかである。
【0039】
従来技術のプローブ顕微鏡に伴う不備は、第3の走査領域における非常に高い速度、すなわち、カンチレバーの過渡運動を引き起こすのに十分な速度で走査を試みる際に遭遇するさらなる問題を考えるとさらに際立つ。そのような状況が発生するのは、例えば試料表面の一段高い領域に遭遇した時に与えられる衝撃に対するカンチレバーの応答が、カンチレバーの第1の制約された共振の周波数を上回る場合である。そのような状況では、先端におけるカンチレバーの傾斜は、恐らくはその定常状態(設定点)の傾斜と異なる大きさであるだけでなく、反対方向である可能性もある。過渡運動は、カンチレバーの角度を位置および時間とともに変化させる。この問題を、図2を参照して具体的に説明する。
【0040】
先端が試料表面との接触によって制約を受けるか、または自由であるか、の2つの可能なカンチレバーの機械的状態が存在することに留意されたい。これらの状態におけるカンチレバーの共振条件を、それぞれ「制約された共振」および「無制約の共振」と呼ぶ。
【0041】
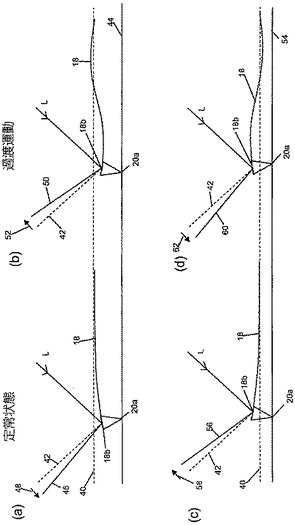
図2a、b、c、dに、プローブ先端20が試料14の表面から衝撃を受け取った各種状況を示す。上記と同様に、プローブ16は、カンチレバーの梁部18に接続された先端20を備える。試料に最も近いプローブの点20a、および、たわみの測定に使用されるカンチレバーの後部18bが示される。カンチレバーの後部18bの定常状態の名目位置が点線40で示される。「名目」とは、フィードバックが作用していた場合に後部18bが保持されるはずの位置を意味する。すなわち、図1のプローブの向きP1に相当する。入射光ビームLが各図の右側に示され、左には、名目位置にあるプローブについての予想反射方向42を点線で示す。すなわち、点線42は、図1のD1に相当する。
【0042】
図2aおよび2bでは、試料表面の位置が実線44で示される。この表面上の位置44は、実質上くぼみであり、この例を分かりやすくするために、先端20は表面を追従し、名目位置から下方に引っ張られる。図2aは、試料から受け取られる衝撃(下方への動きを生じさせる)が、カンチレバー18の整定時間よりも長い所要時間で、比較的低速な状況を示している。すなわち、過渡運動は、プローブが表面の外形に反応する時間内に減衰する。先端20が降下して表面44と接触すると、カンチレバーの梁部18が下方に湾曲し、カンチレバーの後部18bが図の左側に向かって傾けられる。そのため、測定用の光ビームLは、カンチレバーの後部18bから経路46に沿って反射される。したがって、矢印48で示すように、ビームの出射経路は反時計方向にずれた状態で検出される。対比として、図2bに、試料14から受け取られる衝撃がカンチレバー18の整定時間よりも短い持続時間にある時のプローブ16の瞬間的位置の例を示す。先と同様に、先端20は下方に表面レベル44まで引っ張られるが、カンチレバー18の過渡振動は、カンチレバーの長さにわたってリップルが観察されることを意味する。したがって、プローブの瞬間的な位置関係は図2bに示すようになる可能性がある。そのため、カンチレバーの後部18bは、リップルが伝播する時に、試料とのプローブの接触点20aを中心として揺動する。カンチレバーの後部18bが右に傾いた瞬間的位置を図2bに示す。この瞬間、光ビームLは、経路50に沿って反射される。したがって、ビームの出射経路は、矢印52で示すように時計方向にずれて観察される。
【0043】
このように、同じ表面位置を追跡するにも関わらず、プローブのたわみの瞬間的な測定で、図2aおよび2bに示す対照的な状況にある反対の結果が生じることが理解できる。
図2cおよび2dでは、実線54で示すように試料表面の位置が高くされている。したがって、この表面位置54はピークを表し、表面を追従する先端20は、名目位置から上方に持ち上げられる。図2cは、この動きを生じさせる試料から受け取られる衝撃がカンチレバー18の整定時間よりも長い所要時間で、比較的低速な状況を示している。すなわち、過渡運動は、プローブが表面の外形に反応する時間内に減衰する。先端20が表面54と共に上昇すると、カンチレバーの梁部18が上方に湾曲し、カンチレバーの後部18bが図の右側に向かって傾けられる。したがって、調査用の光ビームLは、カンチレバーの後部18bから経路56に沿って反射される。したがって、ビームの出射経路は、矢印58で示すように、時計方向にずれて観察される。図2bと同様に、図2dは、試料14から受け取られる衝撃がカンチレバー18の整定時間よりも短い持続時間である時のプローブ16の瞬間的位置の例を示す。図2cと同様に、プローブの先端20aは表面レベル44と共に持ち上げられるが、カンチレバー18の過渡振動は、過渡モードがカンチレバーの長さにわたって伝播する際にリップルが観察されることを意味する。すなわち、カンチレバーの後部18bは、表面とのプローブの接触点20aを中心として揺動する。その瞬間的な位置関係は例えば図のようになる。図2dの例では、カンチレバーの後部18bは左に傾けられる。この瞬間、光ビームLは、経路60に沿って反射される。したがって、ビームの出射経路は、矢印62で示すように反時計方向にずれて観察される。
【0044】
この場合も、過渡運動が引き起こされた場合、すなわち、プローブが表面上を走査する速度が、カンチレバーの整定時間よりも短い時間枠内にプローブが表面の特徴に反応するような速度である場合には、同じ表面位置54の測定で対照的な結果が生じることが認められる。
【0045】
第3の速度の領域の開始を定義する制限は、画素の収集期間(画像中の1画素に対応する表面部分の画像化にかかる平均時間)がカンチレバーの整定時間よりも短くなること、と言い換えることができる。
【0046】
図2bおよび2dに示すプローブ16の位置は瞬間的なものであることを理解されたい。過渡モードはカンチレバーの梁部18に沿って伝播し、減衰させられない場合は、カンチレバーの後部18の揺動、およびその結果生じる反射ビームの方向の短時間の変動として観察される。例えば低いQ係数でカンチレバーの梁部を使用することで過渡モードが減衰された場合には、後部18bの最初の傾斜の動きがより早く整定することになる。
【0047】
PCT特許出願WO2005/008679には、不均一な試料表面の形状を測定する能力がより高いハイブリッド型システムが記載される。試料表面上で先端を追跡する改良された機械システムが、電子フィードバック機構と組み合わせて実施される。電子フィードバック機構は、画素収集レートよりも大きい所要時間ではあるものの、プローブの基部と試料支持体との垂直方向の分離を調整するために使用される。一般に、これらのフィードバック調整は、複数の走査線にわたる期間にわたって行われるが、各走査線内で、試料表面上の先端の高さの変動が測定されなければならない。1本の走査線の規模では試料表面は十分に平坦であって検出システムの制限が厳し過ぎないものと仮定される。測定された高さの変動から、各走査線に沿って表面形状の変動の画像を形成することができ、電子フィードバック信号が使用されて各走査線を基準レベルに調整する。この改良された機械的追跡システムは、先端が凹凸に遭遇した時に先端を表面とより接触させておくために必要とされる。それにより、各走査線の所要時間内により正確な高さ情報を収集することが可能になる。しかし、この従来技術の装置は、第2の速度領域で動作することは可能であるが、カンチレバーの過渡モードは考慮しない。より優れた追跡が提供され、それにより第3の領域の開始が遅れるが、このような顕微鏡は、第3の領域内で動作した場合になお正確な結果を得ることができない。
【発明の概要】
【発明が解決しようとする課題】
【0048】
本発明の目的は、フィードバックパラメータを所定値に維持するためにフィードバックシステムによって設定された制限を超える速度でプローブ先端が試料表面を走査する時のプローブ先端の高さに関する情報を抽出することが可能な、操作プローブ顕微鏡と共に使用するための検出システムを提供することである。詳細には、本発明の目的は、プローブが過渡運動を受けている間に有用な情報を抽出することが可能な検出システムを提供することである。
【課題を解決するための手段】
【0049】
したがって、本発明は、走査型プローブ顕微鏡とともに使用する検出システムを提供し、このシステムは、基部端および自由端を有しかつ自由端は鋭利な先端を支持するカンチレバーを備えたプローブを照明するビームを生成する光源と、プローブから反射された光を集光する集光手段とを備え、ビームは、プローブ先端近傍のプローブの上部表面を照明し、反射された光は、プローブの上部表面のたわみの指示がそこから取得される第1の成分と、基準点に対するプローブの上部表面の位置に関する情報を第2の成分から抽出するように構成された高さ検出システムに送出される第2の成分、の2つの成分を含む。
【0050】
この構成は、この検出システムを使用して3つの動作領域すべてにわたって試料表面の画像を形成できるという利点を有する。本発明の文脈では、「たわみ」は、本明細書に記載される従来技術で明らかである意味に限定されると解釈すべきではない。「たわみ」は、プローブの上部表面の向きもしくは傾斜の角度(従来技術と同様)、またはカンチレバーの向きから導出される何らかの他の角度の測定結果を包含するものと解釈されたい。それには、カンチレバーの自由端と基部端(またはカンチレバーの長さ上にある他の位置)の間の垂直方向の分離から導出される測定結果も含まれることができる。簡単に言うと、カンチレバーの「たわみ」は、プローブと試料との相互作用の結果カンチレバーに生じる湾曲の形状の何らかの計測結果と理解すべきである。プローブの上部表面のたわみを監視することにより、フィードバックが使用されてプローブ先端と試料の間の平均相互作用力を一定に保つことが可能になる。これには、過度に高い相互作用力が加わった結果試料および/またはプローブに加わりうる応力を制限する効果がある。一方、高さ検出システムで測定される経路差は、プローブの高さの直接的な測定である。カンチレバーのたわみに関係なく、この測定結果は、基準点によって設定される位置に対するプローブ高さの真の指示である。この測定はたわみと無関係なので、フィードバックシステムの応答時間にも、また可能性としては、過渡運動の存在にも影響されず、過渡運動は、カンチレバーのたわみを動的に変える可能性があるが、カンチレバーの高さには影響しない。
【0051】
高さの測定がたわみと無関係である結果、さらに、プローブ基部の垂直(z)方向の高さの知識を有する必要がない。従来技術のAFMシステムでは、画像を形成するデータを抽出するために、基部の高さが測定される。本発明によるAFMでは、画像は、干渉計の出力から直接形成される。したがって、従来技術では、基部の垂直(z)方向の高さを制御する駆動システムへの入力信号が、達成された実際の高さに照らして較正されなければならないのに対して、本発明ではそのような較正の必要性がない。
【0052】
理想的には、高さ検出システムは、反射光の第2の成分と高さ参照ビームとの経路差を検出するように構成された干渉計を備える。そのような干渉計は、この光路差、したがってプローブの相対的な高さの正確な測定結果を生成することができる。好ましくは、干渉計は、一対の直交位相のインターフェログラムを生成する手段を含むホモダイン干渉計であり、インターフェログラムは、複数の干渉縞にわたる正確な干渉縞計数技術にかけることができる。これにより、高さ検出システムの精度が向上し、検出可能なカンチレバーの動きの範囲が拡大する。直交位相のインターフェログラムは、分相性の被覆を有するビームスプリッタで生成されることができる。
【0053】
第1の成分は干渉計にも送出されることができ、干渉計は、反射光の第1の成分と、自由端から離れたカンチレバー上の位置、好ましくは基部端の位置によって長さが定義される光路に沿って伝播するたわみ参照ビームとの光路差を検出し、それによりカンチレバーの傾斜についての情報を提供するようにさらに構成される。すなわち、この例では、たわみの測定結果は、カンチレバーの自由端と、カンチレバーの長さに沿った第2の位置との間の垂直方向の高さの差から得られ、実質的にはカンチレバーの平均傾斜の測定値である。この実施形態では、干渉計が使用されて、高さの情報とたわみの情報両方を抽出することができ、それにより、必要な構成要素の数が減る。
【0054】
あるいは、第1の成分はたわみ検出器に送出されてもよく、たわみ検出器は、プローブの上部表面のたわみの指示を提供するように構成される。したがって、従来技術から知られている任意のたわみ検出器を使用して、たわみ信号が得られる。
【0055】
具体的には、たわみ検出器は第2の干渉計であってよく、第2の干渉計は、反射光の第1の成分と、自由端から離れたカンチレバー上の位置、好ましくは基部端の位置によって長さが定義される光路に沿って伝播するたわみ参照ビームとの光路差を検出するように構成される。あるいは、たわみ検出器は分割フォトダイオードであってもよく、分割フォトダイオードは、反射光の第1の成分が、プローブの上部表面の向きの角度によって決まる相対的強度で、ダイオードの2つの部分に入射するように配向される。
【0056】
このシステムは、反射光を上記で参照した第1および第2の成分に分割するように構成されたビームスプリッタも備えることができる。
プローブは、好ましくは、カンチレバーの自由端の近傍に取り付けられた先端を備え、カンチレバーは基部端で支持され、ビームで照明されるプローブの上部表面は、先端の上方にある。
【0057】
プローブは、プローブの先端を移動させるように動作可能なアクチュエータも含んでよい。一実施形態では、プローブ先端の移動は、プローブ先端の領域内でプローブの上部表面の向きの角度を変えることによって達成されることができる。このアクチュエータは、プローブアセンブリおよび/または支持台を垂直方向に移動するように構成されたどの駆動体よりもはるかに小さな負荷を駆動するように構成される。この理由から、より迅速なフィードバック応答の可能性をもたらす。従来技術の入れ子構造のフィードバックシステムもこのような一体化されたアクチュエータを利用するが、フィードバックループの解釈、および、したがってプローブの高さの判定がやや複雑になるという不利点がある。本発明のこの実施形態は、フィードバックアクチュエータが駆動される位置に関係なく、プローブの高さが直接測定されるので、この不都合点を回避する。
【0058】
第2の態様で、本発明は、試料とプローブの間の相互作用に従って試料を画像化する走査型プローブ顕微鏡を提供し、この顕微鏡は、プローブと試料の表面との間に相対的な運動を提供するように構成された駆動手段と、本明細書に記載のプローブ検出システムとを備える。
【0059】
駆動手段は、好ましくは、試料表面に実質的に平行な面でプローブと試料表面との間に相対的な運動を提供するように構成されたXY走査装置と、試料表面に直交する方向の相対的な運動を提供するように構成されたZ方向駆動体とを備える。そのような構成では、プローブ検出システムから取得されるプローブの上部表面のたわみの指示は、Z方向駆動体を内蔵したフィードバックシステムに付加されることができ、Z方向駆動体は、プローブのたわみを設定レベルに戻すように構成される。Z方向駆動体は、プローブの基部および/またはプローブと一体のアクチュエータを移動するように構成され、プローブ先端を移動するように構成された基部駆動体を含むことができる。
【0060】
従来技術のAFMと異なり、このフィードバックシステムは、XY走査装置が画像画素間でプローブを移動するのに要する所要時間より長い所要時間で動作し、本発明の顕微鏡で記録される画像の品質に悪影響を及ぼすことがない。
【0061】
XY走査装置は、好ましくは、プローブと支持体、または試料と支持体を、プローブまたは試料支持体の共振周波数または共振周波数の近傍で振動させるように構成された共振器を備える。
【0062】
第3の態様で、本発明は、試料とプローブの間の相互作用に従って試料を画像化する走査型プローブ顕微鏡を提供し、この顕微鏡は、プローブと試料の表面との間に相対的な運動を提供するように構成された駆動手段と、試料表面に実質的に直交する方向における、基準点に対するプローブの位置の指示を提供するように構成されたプローブ検出システムとを備え、
プローブは、基部端および自由端を有するカンチレバーを備え、自由端は鋭利な先端を支持し、
駆動手段は、試料表面に実質的に平行な面でプローブと試料表面との間に相対的な運動を提供するように構成されたXY走査装置を備え、走査装置は、プローブまたは試料と支持体を、プローブまたは試料支持体の共振周波数または共振周波数の近傍で振動させるように構成された少なくとも1つの共振器と、試料表面に実質的に直交する方向の相対的な運動を提供するように構成されたZ方向駆動体とを備え、
プローブ検出システムは、プローブを照明するビームを生成する光源と、プローブから反射された光を集光する集光手段であって、ビームはプローブ先端近傍のプローブの上部表面を照明する、集光手段と、プローブから反射された光から、基準点に対するプローブの上部表面の位置に関する情報を抽出するように構成された高さ検出システムとを備える。
【0063】
高さ検出システムは、理想的には、プローブから反射された光と高さ参照ビームとの経路差を検出するように構成された干渉計を備える。
第4の態様で、本発明は、走査プローブの上部表面から反射された光を検出する方法を提供し、この方法は、上部表面のプローブ先端の真上の点に光ビームを誘導し、上部表面から反射された光を集光し、その光を、基準レベル上方のプローブ先端の高さを示す画像を形成するように構成された高さ検出器に誘導するステップを含む。
【0064】
理想的には、上記方法の前に、上部表面上のプローブ先端の真上の点を特定するステップが含まれる。このステップは、好ましくは、
(a)上部表面上に光を誘導するステップ、
(b)プローブをプローブの先端を中心として振動させて上部表面の角度を変えるステップ、
(c)高さ検出器の出力を監視するステップ
(d)光が入射する上部表面上の点の位置を変えるステップ、および
(e)プローブを傾斜させた結果高さ検出器の出力中に見られる変動が最小になるまで、ステップ(c)および(d)を繰り返すステップを含む。
【0065】
これにより、画像品質に過渡運動が及ぼす影響を最小にするための利便な技術が得られる。
プローブは、好ましくは、基部端で保持されかつ自由端または自由端近傍で先端を支持するカンチレバーを備え、ビームによって照明されるプローブの上部表面は、カンチレバーの自由端または自由端近傍にある。
【0066】
あるいは、表面上の点を特定する上記ステップは、
(a)カンチレバーの上部表面上に光を誘導するステップ、
(b)先端を固定位置に維持しながらカンチレバーの基部を垂直方向に移動して、カンチレバーの向きの角度を変えるステップ、
(c)高さ検出器の出力を監視するステップ、
(d)光が入射する上部表面上の点の位置を変えるステップ、および
(e)プローブの基部を移動した結果高さ検出器の出力中に見られる変動が最小になるまで、ステップ(c)および(d)を繰り返すステップ
を含む。
【0067】
プローブの向きの指示からフィードバック信号が得られる実施形態では、フィードバック信号は、プローブが事前に設定された向きに戻されるように基部の高さの調整を行わせるようになっており、次いで、カンチレバーの基部を垂直方向に移動するステップは、事前に設定された向きを変化させることによって達成されることができる。
【0068】
あるいは、上部表面上の点を特定する上記ステップは、
(a)上部表面上に光を誘導するステップ、
(b)既知の距離だけプローブ先端を変位させ、好ましくは、既知の高さの変動を有する試料上でプローブを走査するステップ、
(c)高さ検出器の出力を監視するステップ、
(d)光が入射する上部表面上の点の位置を変えるステップ、および
(e)高さ検出器の出力が、既知の変位について予想される出力と一致するまで、ステップ(c)および(d)を繰り返すステップを含むことができる。
【0069】
あるいは、上記ステップは、
(a)上部表面上に光を誘導するステップ、
(b)プローブの過渡運動を引き起こすのに十分な速度でプローブを走査するステップ、
(c)高さ検出器の出力を監視するステップ、
(d)光が入射する上部表面上の点の位置を変えるステップ、および
(e)過渡運動の結果高さ検出器の出力中に見られる変動が最小になるまで、ステップ(c)および(d)を繰り返すステップを含むことができる。
【0070】
第5の態様で、本発明は、走査型プローブ顕微鏡を使用してデータを収集する方法を提供し、この方法は、
(a)基部端および自由端を有し、自由端が鋭利な先端を支持するカンチレバーを備えるプローブを、試料表面の近傍に移動するステップ、
(b)プローブの上部表面上の先端の真上の点に光ビームを誘導するステップ、
(c)プローブの上部表面から反射された光を集光および分析しながら、試料表面上でプローブを走査するステップを含み、集光された光の第1の成分の分析によって得られるフィードバック信号に応答してプローブの基部を垂直方向に駆動するようにZ方向駆動体が動作し、集光された光の第1の成分から、プローブの上部表面のたわみの指示が得られ、集光された光の第2の成分は、第2の成分と高さ参照ビームとの間の経路差を検出するように構成され、基準レベル上方のプローブ先端の高さを示す画像を形成するように構成された干渉計に送出され、フィードバック信号への応答は、複数の画像画素が収集される所要時間よりも長い所要時間にわたる。
【0071】
次いで本発明の実施形態について、添付図面を参照して、単なる例として説明する。
【図面の簡単な説明】
【0072】
【図1】典型的なたわみ検出システムを示す、従来技術の原子間力顕微鏡の構成要素の概略図である。
【図2】図2(a)は、カンチレバーの過渡運動が観察される閾値より下の走査周波数で画像化する際にとりうる先端およびカンチレバーの向きの例の図である。図2(b)は、カンチレバーの過渡運動が観察される閾値より上の走査周波数で画像化する際にとりうる先端およびカンチレバーの向きの例の図である。図2(c)は、カンチレバーの過渡運動が観察される閾値より下の走査周波数で画像化する際にとりうる先端およびカンチレバーの向きの例の図である。図2(d)は、カンチレバーの過渡運動が観察される閾値より上の走査周波数で画像化する際にとりうる先端およびカンチレバーの向きの例の図である。
【図3】本発明によるプローブ検出システムを有する原子間力顕微鏡の構成要素の概略図である。
【図4】高速走査型プローブ顕微鏡に組み込まれた、本発明によるプローブ検出システムの概略図である。
【図5】本発明による、干渉測定を用いた高さ検出システムの概略図である。
【図6】高さが測定されるカンチレバーの後部上の点を変化させた影響を示す概略図である。
【図7】試料表面の走査を実行する準備として本発明の検出システムを位置合わせするために使用される装置の概略図である。
【発明を実施するための形態】
【0073】
図3を参照すると、本発明の一態様により構築された検出器の第1の実施形態を利用するAFMの実装が概略的に示され、全体を70で表す。上記で図1を参照して説明した従来技術のAFMと共通の要素には同一の参照符号を付す。したがって、図のAFM装置は、その表面がプローブ16で調査される試料14を受けるように適合された可動式の台12を備える。プローブ16は、カンチレバーの梁部18および先端20を備え、先端20は点20aに向かって先細になり、カンチレバーの梁部18の一端に向かって配置される。カンチレバーの梁部18の他端は、支持台22によって支持される。
【0074】
1つまたは複数の駆動モータ(72。図示せず)が使用されて、試料14(台12と共に)および/またはプローブ16を、x、y、およびz方向の3次元で相互に相対的に走査できるように駆動する。当分野の慣習に従い、デカルト座標系のz軸は、試料14によって占められる面に直交する軸と解される。すなわち、プローブ16と試料14間の相互作用力の強さは、試料14上での先端20のxy位置(先端20が画像化する画素)および試料上の先端20の高さの両方に依存する。
【0075】
各種駆動モータの中で、z方向位置決めシステム72が本発明の目的には最も有力である。z方向位置決めシステム72は、先端20を試料14に向かう方向および離れる方向(z方向)に動かすように動作可能な圧電駆動体を備える。この実施形態では、z方向位置決めシステムは、プローブの支持台22に接続される。あるいは、試料台12に接続してもよく(図1に示す)、また、音声コイルや熱バイモルフ・アクチュエータ等の非圧電駆動機構を備えてもよい。さらなるモータが、支持台22、台12、またはその両方に接続され、先端20が試料14上をラスタ方式または他の方式で走査するように、試料面(x、y)において試料14と先端20間の相対的な運動を提供するように動作可能である。
【0076】
一実施形態では、z方向位置決めシステムは、上記のように台(または支持台)の駆動体、および、プローブ自体と一体化された追加的なアクチュエータの両方を備えることができる。この一体型アクチュエータを使用して、アセンブリ駆動体を用いて可能なよりも高速のフィードバック応答でプローブのたわみを駆動することができる。
【0077】
プローブ16は、ローマス(low-mass)AFMプローブであり、走査時には先端20と試料表面の間に相互作用力が発生する。プローブ検出機構74については下記でより詳細に説明するが、先端20上方のカンチレバーの後部の点18bの垂直(z)方向の変位とたわみ(傾斜)両方の指示を得るように構成される。垂直方向の変位に関するデータが分析され、ディスプレイ(図示せず)に出力される。カンチレバーの後部18bの傾斜/たわみに関する情報は、フィードバックコントローラ30に入力され、コントローラ30は、z方向位置決めシステム72の駆動機構に接続される。
【0078】
便宜上、「垂直方向の」という表現は、顕微鏡システムのz方向の動きに適用されることに留意されたい。前述の解説から、これは、顕微鏡のz軸が垂直方向に位置合わせされる状況を限定する意図はないことが明らかである。顕微鏡は、目的に合わせて任意の利便な向きで配置されることができる。
【0079】
プローブ16は、一般に、(AFMの場合)シリコンまたは窒化シリコンで作製され、従来技術との関連で上述したような形状および大きさに形成される。
試料の画像を撮影する際、AFM70は以下のように動作する。z方向位置決めシステム72およびさらなる駆動体を使用して、まず試料14がラスタ(x、y)走査の開始位置で先端20と接触させられる。従来、AFMの術語では、先端20は、原子相互作用力が斥力領域にある時に、試料14と接触していると表現される。プローブ16が試料表面と接触すると、したがって、先端20が上方に向けて引っ張られる。先端から離れた方の側にあるカンチレバー18の基部は、支持台22によって、所定の位置に固定され、それによりカンチレバー18が上方に湾曲、またはたわむ。従来のように、また従来技術に関連して上述したように、支持台22が降下され、カンチレバーの湾曲が所定レベルに達するまでプローブ16を試料14に向けて移動させる。この所定レベルが、フィードバックコントローラ30の設定点となる。
【0080】
走査が進行すると、先端20は、試料表面の高さが変動するのに伴って上下に移動する。先端が移動するのに伴って、傾斜の度合いが変化し、それにより、フィードバックコントローラ30に供給される信号が変更され、z方向位置決めシステム72が調整される。プローブの基部がフィードバックに応答して調整される際、以下の考慮事項が適用される。先端が試料上を速度vで移動する時、先端は試料表面を追跡し、したがってvに比例する率ftrackで表面高さの変動に遭遇する。減衰時間または整定時間τの過渡運動がカンチレバー中に引き起こされる。フィードバックシステムの応答時間は、フィードバックシステムがフィードバックパラメータの変化を検出し、それに応じてプローブ基部の高さを調整するのにかかる時間である。
【0081】
3つの走査速度領域が特定されることができる。
・フィードバックシステムの応答時間がデータ収集点間の時間間隔よりも短い場合、フィードバックシステムは、プローブが1つの画像点で表面の高さに関するデータを収集している間にプローブの高さを調整するのに十分な時間を有する。すなわち、すべての画像点について、プローブが一定のたわみにあるとみなすことができ、したがって、プローブと試料の間の相互作用力も一定とみなすことができる。これが第1の速度領域であり、この領域では、フィードバックを使用する従来技術のシステムは、正確な表面情報を抽出することができる。しかし、本発明の装置は、プローブの高さに関する情報が検出システム74によって直接得られる点で従来技術と異なる。
・フィードバックシステムの応答時間がデータ収集点間の時間間隔より長い場合は、フィードバックは、一定の平均たわみを維持するようにのみ働く。この第2の領域では、先端の速度は、フィードバックシステムの応答時間で対応できるよりも高い頻度で表面の変動が追跡されるような速度であり、したがって、そのような変動は、プローブ高さ検出システムによって直接測定されなければならない。フィードバック信号は一定の平均たわみを維持するために使用され、一定のたわみは、プローブ、試料、またはその両方の損傷を引き起こす可能性のある極端な相互作用の強度をプローブが経験しないように作用する。
・第3の走査領域では、カンチレバーの整定時間がデータ収集点間の時間間隔よりも長く、カンチレバー中で引き起こされる過渡運動が、プローブが後続の試料領域の画像化に移るまでに減衰しない。しかし、本発明の高さ検出システムは、そのような運動があってもプローブの高さの測定値を抽出することができる。それにより、先端が試料と接触した状態を保っていれば、試料の高さの指示が得られる。
【0082】
これらの領域には広い定義が与えられ、各領域の開始は、特定の動作条件、ならびに顕微鏡および調査対象の試料のパラメータに明らかに依存する。
次いで、本発明による検出システム74の動作をより詳細に説明する。光源(図示せず)がレーザビーム76を発し、ビーム76は、対物レンズ78によりカンチレバーの後部18b上で焦点を結ぶ。反射光80a、b、cがレンズ78で収光され、非偏光ビームスプリッタ82に誘導される。図3から分かるように、カンチレバー18bの傾斜が光の反射角度に影響する。プローブが設定フィードバック位置に維持された場合、反射ビームは経路80bをたどる。一方、カンチレバーの後部18bが(図を基準として)左に傾けられた場合、反射ビーム80aは反時計方向に偏向され、右への傾斜は、反射ビーム80cを時計方向に偏向する。カンチレバーの後部18bがレンズ78の焦点または焦点の近くに位置する時には、反射ビームの角度の変動が、レンズを通った後の横方向の変位に変換される。すなわち、カンチレバーが左に傾斜すると、反射ビームの左方への横方向変位が生じ、右に傾斜すると、設定フィードバック位置に対して右への変位を生じさせる。
【0083】
ビームスプリッタ82は、入射する光の実質的に半分84a、b、cを90度反射し、残りの半分86a、b、cを透過させるように構成される。透過した成分86a、b、cは、干渉計88に入力される。この干渉計の動作については、下記で図5を参照してより詳細に説明する。要約すると、反射ビーム86a、b、cは、台12の上部表面から反射された参照ビームと干渉する。あるいは、台表面との間に既知の関係を有する別の固定点が使用されてもよい。これにより、2つのビーム間の経路の差、および、したがって、台表面上方のカンチレバーの後部18bの高さの指示が得られる。この測定された高さの変動が抽出されて、画像を形成する。
【0084】
ビームスプリッタ82から反射された成分84a、b、cは、レンズ90によってたわみ検出器28上に集光される。従来技術と同様に、検出器28は、その長さにわたって、独立した検出器領域AおよびBに分割される。これらの領域から生成される出力信号は、差動増幅器92に入力され、増幅器92は、2つのチャネル間の差に等しい信号を出力する。検出器28は、カンチレバーの後部18bが設定たわみ位置に傾けられると差動増幅器からの出力も設定点になるように、集光の光学諸特性と位置合わせされる。すなわち、反射光80b、84bは、チャネル出力の差が設定値になるようにチャネルAとBに分散される。カンチレバーの後部18bの左への傾斜は、検出器28からの信号がチャネルBで増加し、差動増幅器92からの出力の減少につながることを意味する。逆に、右への傾斜は、チャネルAが信号の増大を受け、差動増幅器92で出力の増加が生じることを意味する。フィードバックコントローラ30は、差動増幅器92から受け取られる信号をその設定点に維持するように、z方向位置決めシステム72を操作する。
【0085】
フィードバック信号と無関係に、またはそれと同等にカンチレバーのたわみと無関係に、表面上のプローブの真の高さが干渉測定高さ検出システムで測定される。したがって、フィードバックシステムが使用されて、平均のたわみが一定レベルに維持されることを保証する。
【0086】
検出システムの光76がカンチレバーの後部18b上で焦点を結ぶことが重要である。この理由から、z方向位置決めシステムは、対物レンズ78にも接続され、プローブ16が上昇または降下されると、レンズ78が等しい量だけ上昇または降下されるように構成される。代替実施形態では、対物レンズ78は、先端からの予想される動きの範囲より大きな焦点深度を有するように選択される。そのため、先端20に対して対物レンズの位置を調整する必要はない。
【0087】
本発明について、原子間力顕微鏡を示す図3との関連で説明するが、この検出システムは、プローブ先端の高さを正確に判定することが重要であるすべての走査型プローブ顕微鏡に使用できることが分かることに留意されたい。
【0088】
さらなる実施形態では、(x、y方向)走査駆動機構(図には図示せず)およびz方向位置決めシステム72は、圧電とは限らない任意の適切な駆動手段に置き換えることができる。それらの駆動体は、試料台12、プローブ支持台22、または両者の組み合わせに接続されることができる。
【0089】
上記のたわみ検出器28は、カンチレバー18のたわみを測定する代替の知られた手段に置き換えられてよい。例えば、カンチレバーは、一体化された圧電抵抗センサと共に形成されることができる。カンチレバーの高さを測定するために使用されるシステムと同様の高さ検出システムが、たわみの測定にも使用されてよい。すなわち、干渉計が使用されて、カンチレバー基部の高さに対する先端20の高さを測定する。
【0090】
本実施形態で使用される光源はレーザ光源であるが、代替の光源も利用可能である。干渉測定による検出のためには、光は、干渉計の仕様で必要とされる程度にコヒーレントでなければならない。
【0091】
カンチレバーの過渡運動は、フィードバックが実施されることが可能な速度に根本的な制限を与える。カンチレバーは、フィードバックシステムがたわみを測定および調整するのにかかる時間内に整定できるようにされなければならない。そうでないと、過渡運動により、不正確なたわみ情報が生成される。たわみを測定する種々の方法は、それに応じて、わずかに異なる制限をフィードバック制御システムに課す。カンチレバーの角度を使用してたわみを測定する際、フィードバック制御システムの応答時間は、制約されるカンチレバーの整定時間より大きくなければならない。ただし、高さ検出システム(上記で参照した干渉計等)を使用する場合は、フィードバック制御システムの応答時間は、制約のないカンチレバーの共振周波数のみで制限される。
【0092】
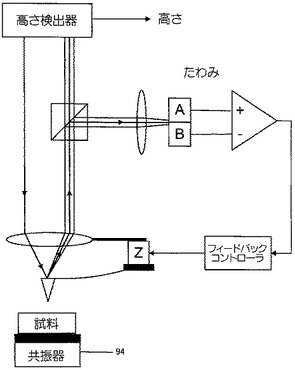
本発明の検出システムと共に使用するのに特に適した代替のAFM装置を図4に示す。図4では、(x、y)走査駆動機構の1つまたは両方が共振器94に置き換えられる。共振器94は、試料台をその共振周波数または共振周波数の近傍で振動させるように設定された振動ドライブである。このような共振走査型顕微鏡は、非常に高速かつ安定した走査能力を提供し、その能力は、一定の相互作用モードで動作する場合の閾値制限を優に上回る可能性がある。あるいは、共振器94は、プローブアセンブリを共振周波数または共振周波数の近傍で振動させるように設定されてもよい。
【0093】
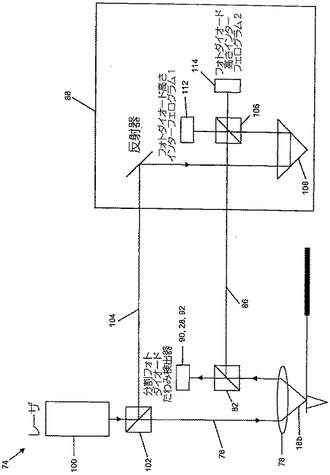
図5を参照すると、検出システム74の光学構成要素をさらに詳細に示す。前出の図と同様に、共通の構成要素には同様の参照符号を付す。レーザ光源100からの光は、第2のビームスプリッタ102により、入射ビーム76と参照ビーム104に分割される。入射ビーム76は、対物レンズ78によりカンチレバーの後部18b上で焦点を結ぶ。カンチレバーで反射された後、ビーム80は、第1のビームスプリッタ82で分割される。先に述べたように、第1の成分84は、たわみ検出器90、28、92に誘導され、第2の成分86は干渉計88に誘導される。
【0094】
干渉計の内部で、カンチレバー18bから反射されたビーム86は、ビームスプリッタ106で分割される。参照ビーム104は、適切に配置された再帰反射器108に誘導され、その後ビームスプリッタ106に誘導される。再帰反射器108は、試料の垂直(z)方向位置に対して固定光路長を提供するように位置合わせされる。ビームスプリッタ106は、エネルギー吸収性の被覆がなされ、入射ビーム86と参照ビーム104の両方を分割して、ほぼ90°に等しい相対的な位相ずれを有する第1および第2のインターフェログラムを生成する。この2つのインターフェログラムは、それぞれ第1の光検出器112および第2の光検出器114で検出される。
【0095】
理想的には、光検出器信号は、90°の位相差を有する相補的な正弦信号および余弦信号である。さらに、それらの信号は、DCオフセットがなく、等しい振幅を有し、カンチレバーの位置xおよびレーザの波長λのみに依存すべきである。2つの光検出器信号が、等しい振幅で直角位相である完全な高調波でない結果生じる誤差を求め、その誤差に補正を適用するために、知られた方法を使用して光路差を変化させながら光検出器112、114の出力を監視する。同様に、DCオフセットのレベルも当技術分野で知られる方法により補正される。
【0096】
この光検出器信号は、専用ハードウェアまたはプログラムされたコンピュータとして提供されることが可能な、従来の干渉計可逆干渉縞計数装置および干渉縞再分割装置と共に使用するのに適する。直交位相の干渉縞計数装置を使用すると、カンチレバーの位置の変位をλ/8の精度、すなわち波長532nmの光の場合66nmの精度で、測定することができる。信号の逆正接に基づく知られた干渉縞再分割技術は、精度をナノメートル規模またはそれ以下まで向上することを可能にする。
【0097】
2つのコヒーレントビーム間の経路差分を抽出する、干渉測定による方法は当分野でよく知られており、そのためこれ以上は詳細に説明しない。
上記の実施形態では、参照ビームは、試料のz方向位置に対して固定された光路長を有するように構成される。したがって、上記のように、参照ビームは、試料が載せられた台の表面、または台の位置にその位置が関連付けられた再帰反射器から反射されることができる。あるいは、反射器と試料のz位置の関係は固定されなくともよい。そのような実施形態では、参照ビームは、固定点から反射されることができ、固定点は、試料のz位置と既知の(だが変動する)関係を有する。したがって、先端の高さは、干渉測定で測定された光路差および固定点に対する試料のz方向位置から推定される。
【0098】
本明細書に記載される干渉計は、ホモダインシステムの一例である。ここに記載される特定のシステムは、本願にいくつかの利点を与える。2つの直交位相インターフェログラムを使用することにより、複数の干渉縞、したがってより広い変位範囲にわたるカンチレバーの変位の測定が可能になる。ビームスプリッタ106に移相性の被覆を使用することにより、干渉計が、例えば光ビームがカンチレバーから反射される際の偏光の変化から生じる偏光効果の影響を受けなくなる。これらの原理に基づく干渉計の例が米国特許第6,678,056号に記載される。光路長の変化を測定可能な代替の干渉計システムも本発明と共に使用されてよい。適切なホモダイン偏光干渉計が上記で参照した欧州特許第1892727号に記載され、適切なヘテロダイン干渉計が上記で参照した米国特許第5,144,150号に記載される。
【0099】
上記のAFMは、第2の走査速度領域で動作可能であることが明らかである。検出システムによって抽出された高さ情報は、プローブの真の高さ、したがって試料表面の形状の真の高さを表す。これは、先端に対するプローブ基部の位置、すなわちたわみに依存しない。したがって、走査中に平均値を中心としたたわみの変動が許されるが、それは、干渉測定による高さの測定に関係しない。
【0100】
しかし、第3の走査速度領域に移る時に、本発明のAFMを運用に向けて準備する際に追加的なステップが含まれなければならない。カンチレバーで過渡運動が引き起こされた場合、その運動は、カンチレバーの後部18bの揺動として現れることは、図2を参照してすでに示した。そのような効果が高さの画像中でアーチファクトとして見えるのを回避するには、検出システムの調査用レーザビーム76がその揺動の節に焦点を結ぶことが重要である。すなわち、先端の点20a上方の位置である。これは、出力画像を監視し、画像に重なる周期的な変動が最小になるか、さらには消失するまで入射ビーム76の検出位置を調整することにより、経験的に実現されることができる。すなわち、装置70を使用して第3の領域内の走査速度でデータを抽出する前または最中に、プローブおよび干渉計が正しい配列に設定されなければならない。
【0101】
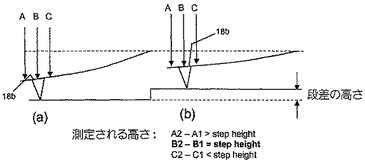
調査用ビームがレーザビームの後部で入射する位置が重要である第2の理由を、図6を参照して説明する。図6は、カンチレバーの後部18bにおける3つの可能なレーザビームの入射位置を示す。状況(a)では、プローブ16はある向きにあり、状況(b)では、試料表面の段差を追従して第2の向きにある。レーザビームが、プローブ先端20より右の位置Aに合わせられた場合は、状況(b)ではたわみがより浅い角度なので、測定される高さの変化A2−A1が段差の高さより大きいことが明白である。逆に、ビームが位置Cに合わせられた場合には、測定される変化C2−C1は、真の段差の高さより小さくなる。段差の高さの真の測定結果は、レーザビームが正確に位置B、すなわち先端20と試料14との最も近い接触点の上方に合わせられた場合にのみ得られる。つまり、干渉計を正確にプローブ形状に合わせることが重要である。
【0102】
真の高さの問題と過渡運動の影響の問題は、基本的には入射ビームを先端の点のすぐ上に位置合わせすることによって克服されるので、ともに同じ方法で対処することができる。真の高さの問題は、第2および第3両方の走査速度領域に該当することに留意されたい。これは、この問題は、干渉測定で高さ情報が抽出される際にカンチレバーの傾斜/たわみが変動するのを許す結果生じるためである。したがって、最も正確な画像情報を得るために、カンチレバーの傾斜/たわみの変動が許される走査速度領域については、高さ検出システムをプローブの形状と合わせるステップが行われなければならない。
【0103】
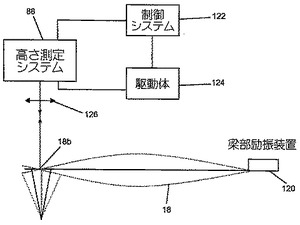
上記で述べたように、位置合わせは、過渡運動が引き起こされる走査の前または最中に、高い走査速度で経験的に実現されることができる。あるいは、図7に示す位置合わせシステムが使用されることができる。このシステムでは、梁部励振装置120が、カンチレバーの梁部18の振動を引き起こすように設定される。それに応じてカンチレバーの後部18bが振動または揺動し、その影響は、たわみ検出および高さ検出システムにおける周期的な信号の変動として後部の表面18bから反射する光に観察されることができる。図の実施形態では、制御システム122が、高さ検出システム88の出力を監視するように設定される。カンチレバーの振動に伴ってこの出力信号の周期的な変動が観察される場合、制御システム122は、1つまたは複数の駆動体124に信号を送り、駆動体124は、検出点(カンチレバーの後部18bに光が入射する点)を横方向に移動する。検出点の調整は、高さ検出信号中の揺動の影響が最小になるまで継続する。
【0104】
図7の実施形態では、駆動体124が高さ検出システム88に接続され、したがって、矢印126で示すように、カンチレバーの後部18bに入射する光の位置合わせを、検出点がずらされるように移動するように動作可能である。あるいは、1つまたは複数の駆動体124は、プローブ自体に接続され、制御システム122の指示に従ってプローブを横方向に動かして検出点を上記のようにずらすように構成される。すなわち、検出点は、プローブを動かすか、またはプローブに入射する光の位置合わせを移動することによって調整される。
【0105】
カンチレバー18の振動、およびしたがってその後部18bの揺動は、圧電トランスデューサ等の知られた梁部振動装置120によって生成される。あるいは、カンチレバー18は、電場または磁場に反応するように適合させることもできる。その場合、振動は、カンチレバー18が機械的に反応する、振動電場または磁場を用いて生成されることができる。
【0106】
検出点を設定する代替法は、高さ検出信号を監視しながらカンチレバー基部の高さを変えるものである。その場合、カンチレバーの後部18b上の検出点は、カンチレバー基部の高さの変化をもたらす高さ検出信号中の変動を最小にするように調整されることができる。基部の高さは、各種機構で調整されることが可能であるが、有利な技術の1つは、フィードバック設定点を変えるものである。それにより、新しい設定点値が達成されるまで、カンチレバー基部と試料の間の垂直方向の分離が変化する。この方法には、試料と先端の間に加わる最小および最大の力の制御を可能にするという利点がある。
【0107】
さらなる代替法は、例えば標準的な段差サンプル等の既知の高さの変動を有する試料を走査することにより、既知の垂直方向の距離だけカンチレバーの先端をずらすものである。そして、高さ検出信号が適正な変位または高さの変動を示すまで、カンチレバーの後部18b上の検出点の位置が調整される。
【0108】
一般には、カンチレバーの後部18bの位置は、プローブ自体から幾何学的に配置するよりも、経験的に先端の点20aのすぐ上に配置する方が好ましい。その理由は、現在のプローブ製造方法を使用すると、先端の位置に常に多少の不確定性があるためである。無論、特定のプローブについての先端位置が上記のような経験的技術によって一旦配置されると、その位置を記録して、その後同じプローブを使用する際に経験的な決定を繰り返す必要性を回避することができる。
【0109】
本発明のこの特徴は、プローブ(またはそれと同等に試料および台)を共振で振動させることによってラスタ走査の少なくとも1つの要素が迅速に実行される、WO2004/005844に記載されるような共振走査型顕微鏡に使用するのに特に適する。そのような走査速度は、カンチレバーの過渡運動を引き起こす可能性が非常に高く、過渡運動があると、従来技術の検出システムで収集される画像が不明瞭になる。
【技術分野】
【0001】
本発明は、プローブ顕微鏡技術の分野に関し、より詳細には、試料表面との関連で顕微鏡プローブの位置を監視するために使用される検出システムに関する。
【背景技術】
【0002】
走査型プローブ顕微鏡(SPM)の基礎となる原理は、試料の画像を生成するためにナノメートル規模のプローブ先端で試料表面の機械的走査を実行するというものである。画像中の特徴は、先端と試料の間の相互作用の変動の結果生じる。
【0003】
SPMの特定の例は、原子間力顕微鏡(AFM)である。原子間力顕微鏡では、試料とプローブの鋭利な先端の間の力の相互作用が観察される。典型的なAFMのプローブは、基部で支持台に固定され、その反対側の(自由)端に先端を有する、非常に小型のカンチレバーを備える。プローブ先端が試料に近づけられると、試料と先端の間に相互作用力が発生する。先端が運動している場合、例えば振動している場合は、相互作用力がその運動を何らかの形で変化させる。先端が静止している場合、力は、試料表面に対して先端を変位させる。
【0004】
走査の過程で、先端と試料表面間の相互作用の強さは、プローブ先端の下の表面の特性が変化すると変わる。3軸の高解像度走査装置は、通例、試料とプローブの間に相対的な運動を発生させ、試料および/またはプローブ支持台のどちらかを駆動する。プローブ先端の位置および/または運動のいずれかに対する相互作用力の影響が走査中に監視される。標準的なAFM動作では、相互作用力の強さは、一定に保たれる。すなわち、プローブに対する相互作用力の影響が観察され、変化があると、その変化に応答してフィードバックシステムが試料とプローブ基部の分離を調整するように動作して、観察されるパラメータを所定の値、すなわち設定点に戻す。この調整に関連するデータ(従来は垂直方向または「z」方向の動き)が収集され、そのデータが使用されて、試料表面の一領域にわたる試料の画像を構築することができる。
【0005】
上記のように、基部と試料の分離に行われる調整は、従来は、垂直方向すなわちz方向で行われ、試料表面はx、y面で走査される。本明細書ではこの慣習に従うが、顕微鏡は、試料が水平面方向に配置されず、したがってフィードバック調整が垂直方向でないように構成されることも可能であることを念頭に置かれたい。すなわち、用語「垂直方向」は、単に、試料面に対して直角、またはそれと同等に試料表面が走査される面に対して直角の意味と理解されたい。従来、この方向は、図1に示すデカルト軸で示すようにz方向と呼ばれる。
【0006】
AFMで形成される画像の解釈は、ある程度、調査対象の表面の性質に依存する。一般には表面の形状が画像に最も大きく寄与し、走査時には試料の高さがプローブによって細密に追従されるが、表面の疎水性や親水性、粘弾性等の他の特性も寄与する場合がある。プローブおよび顕微鏡はさらに、適切な相互作用力を介して、磁場や電場等の他の試料特性を測定するように構成されることもできる。
【0007】
AFMは、各種の画像化モードで動作するように設計することができる。コンタクトモードでは、プローブは、試料と実質的に常時接触した状態を保つ。ダイナミックモードでは、プローブが振動させられ、試料と全く接触しないか、または間欠的に接触する。
【0008】
表面の調査に静止した先端が使用される場合は、相互作用力がカンチレバーの湾曲またはたわみに及ぼす効果を使用して、走査中の先端の位置が監視される。先端と表面の間の相互作用力が変化すると、先端は、表面の方に引っ張られるか、または表面から押し離される。この先端の動きがプローブのカンチレバー部に伝達され、カンチレバーは、それに応じてその長さにわたって湾曲する、またはたわむ。この構成のAFMは、当技術分野でよく知られるように、光てこシステムや他のたわみ検出器等の高感度検出器でカンチレバーのたわみを測定するように設定される。この文脈におけるたわみとは、一般にカンチレバーの湾曲の指示を得るために用いられるプローブの上部表面の傾斜を言う。
【0009】
あるいは、プローブは、プローブの共振振動数の1つまたはその近傍で垂直方向に振動させることもできる。試料とプローブ間の相互作用の変動がプローブの運動に影響する。詳細には、この振動の振幅、位相、および共振振動数が監視されることができ、一定の平均相互作用を維持するためにプローブと試料の分離が調整される。
【0010】
AFMは、その動作モードに関係なく、種々の環境(空気、液体、または真空)内で多種多様な試料の原子スケールの画像を得るために使用することができる。一般に、AFMは、圧電アクチュエータ、光てこたわみ検出器、および、シリコン製造技術を使用して製造される非常に小型のカンチレバーを用いる。その高解像度と多用途性により、AFMは、工業検査、半導体製造、生物学的研究、材料科学、およびナノリソグラフィ等の種々の分野で応用されている。
【0011】
用語「プローブ」、「先端」、および「カンチレバー」は、この分野ではしばしば同義で使用されるが、本発明の説明のために、これらの用語に、より厳密な定義が必要である。「先端」(またはより文脈に適切な場合は「プローブ先端」)は、カンチレバーの梁部の自由端に配置された、多くの場合円錐または角錐型の3次元構造を言う。先端は、調査対象の表面との最も近い相互作用点である点に向かって次第に細くなる。カンチレバーは、先端を除いた梁部自体であり、一端で先端を支持し、他端は顕微鏡装置によって保持される。カンチレバーと先端を合わせてプローブと呼ぶ。
【0012】
図1に、従来のAFM10の基本構成要素を示す。この従来技術によるAFM10は、可動式の台12を備え、台12の上に、プローブ16で調査される試料14が載せられる。プローブ16は、カンチレバーの梁部18および先端20を備え、先端20は、微小点20aに向かって先細になり、カンチレバーの梁部18の一端に向かって位置する。カンチレバーの梁部18の他方の端は、支持台22に固定される。z方向位置決めシステム24が台12に接続され、z方向位置決めシステム24は、台12をプローブ16に向かう方向およびプローブ16から離れる方向(z方向)に移動するように動作することが可能な圧電駆動体を備える。さらなる駆動体(図示せず)が支持台22、台12、またはその両方に接続され、試料面(x、y)上で試料14とプローブ16の間の相対的な運動を提供するように動作可能である。光源26がビームLを発するように構成され、ビームLは、先端20が取り付けられている位置のカンチレバーの梁部18の上部表面(後部)18bに誘導される。カンチレバーの後部18bから反射された光は、一般には分割フォトダイオード28である位置敏感型検出器(PSD)に伝播し、フィードバック信号が生成される。検出器28の出力は、フィードバックコントローラ30を介してz方向位置決めシステム24に接続される。
【0013】
PSDからのフィードバック信号を処理して、プローブのたわみ、振幅、位相、または他のパラメータ等の数量を抽出することができる。説明を簡略にするために、この従来技術のAFMは、プローブのたわみに基づくフィードバックを使用してコンタクトモードで動作するものとして説明する。
【0014】
プローブ16は、一般に(AFMの場合)シリコンまたは窒化シリコンで作製される。通例、カンチレバー18は、長さ100〜200マイクロメートル前後、幅20〜50マイクロメートル前後、厚み0.5マイクロメートル前後であるが、無論、この大きさは用途に応じて変えることができる。形状も変えることができるが、通例は矩形または三角形であり、後者の場合は先端20が三角形の頂点にある。先端20は、典型的にはその基部で5マイクロメートルであり、高さが3〜10マイクロメートル、端部の曲率半径が10〜20ナノメートルである。使用時には、先端20の端にある微小点20aが試料の方に向けられる。
【0015】
試料の画像を撮影する際、従来技術のAFM10は次のように動作する。z方向位置決めシステム24を使用して、初めに、カンチレバー18が所定レベルまでたわむまで先端20が試料14に向けて動かされる。例えば図1でプローブの輪郭P1で示すこの所定のカンチレバー18のたわみの度合いが、フィードバックコントローラ30の設定点となる。
【0016】
カンチレバー18のたわみは、光ビームLおよび検出器28を使用して監視される。検出器28は、その長さに沿って、独立した検出器領域AおよびBに分割される。検出器からの出力信号は、領域Aを照明する光の強度と領域Bを照明する光の強度の差である。したがって、検出器から出力される強度差から、カンチレバーのたわみの指示が得られる。検出器28は、カンチレバー18が位置P1(設定点)まで湾曲した時にカンチレバーの後部18bに入射する光ビームLが経路D1に沿って反射され、領域AとBに実質的に等しく入射するように配置される。すなわち、lA−lB≒0であり、lAおよびlBはそれぞれ領域AおよびBを照明する光の強度を表す。lAおよびlBの正確な値は調整されることができ、その値が使用されてたわみの設定点の位置を識別する。
【0017】
次いで、試料14の表面上で先端20が走査され、通例はラスタパターンに従う。先端20が、一段高くなった表面の部分に遭遇すると、表面を追跡する先端20は、さらに上方に移動させられる。それにより、プローブ16がたわみを、例えば位置P2まで増す。プローブ16がこの位置にある時、光ビームLと、カンチレバーの後部18bで定義される表面との間の入射角が変わる。光ビームLは、そのため別の経路D2に沿って反射され、したがって、検出器の領域Bよりも領域Aの方により完全に入射する。すなわち、検出器28の2つの部分に入射する光の強度の差lA−lBが、以前の(設定点の)値から変化している。したがって、強度差の値からカンチレバーのたわみの指示が得られ、重要な点として、カンチレバーが設定点からどれほどたわんだかについての指示が得られることが理解できる。フィードバックコントローラ30は、プローブ支持台22の垂直方向の位置を試料14から離すように調整して、検出器28から受け取られるたわみ信号をその設定点(この例ではlA−lB≒0)に戻すように設定される。プローブ20は、したがって、P1として示す向きに維持される。
【0018】
逆に、先端20が、高さが一段低い表面部分に遭遇すると、設定点の湾曲の結果生じるカンチレバーの梁部18の偏寄力が先端20を下方に押し下げる。したがって、プローブ16は、たわみを減少させ、P0で示すような向きをとる。この向きでは、カンチレバーの後部18bへの光ビームLの入射角は、ビームLが経路D0に沿って反射されるような角度となる。したがって、検出器の領域Aよりも領域Bが完全に照明される。フィードバックコントローラ30は、再度プローブ支持台22の垂直方向位置を調整して試料14に向けて動かし、たわみ信号を設定点に維持する。したがって、プローブ20は、P1として示す向きに維持される。
【0019】
このようにして、顕微鏡システムのフィードバックは、先端の上方にあるカンチレバーの後部18bの傾斜角によって決まるプローブ16のたわみが、走査の過程を通じて実質的に一定に保たれることを保証する。それにより、先端を表面方向に引き寄せる、または表面から離れる方向に押し戻すように作用する、プローブ先端20と試料14の間の相互作用力も実質的に一定に保たれることが保証される。走査の進行に伴い、試料表面の高さの指示を提供するために、z方向位置決めシステムによって設定される支持台の垂直方向位置が測定される。走査過程でz方向位置決めシステム24によって行われる調整を使用して画像を構築する。
【0020】
近年のプローブ顕微鏡技術の進歩により、より短いデータ収集時間で、はるかに高速の走査を行う技術が開発されている。しかし、PCT特許出願WO02/063368およびWO2004/005844に記載されるようなこの新世代の顕微鏡では、AFMの構成要素自体によって課される制約が画像収集時間を制限することが次第に明らかになりつつある。
【0021】
上記の従来技術によるAFMの能力を参照すると、走査速度が上げられるのに従って、AFM動作の3つの明確な領域が区別されることができる。
上記の従来技術のAFMでは、先端20が試料表面上を連続的に移動されて、毎秒設定数の画素をカバーする。カンチレバーのたわみが監視され、フィードバックシステムが、プローブ16をあらかじめ設定された湾曲向きP1に維持するために、プローブ20と試料14間の垂直方向の分離を継続的に調整する。たわみの変化が検出され、次いでその変化に応答して垂直方向の分離が調整されることができる速度が、基本的に第1の(最も低速な)領域の走査速度の上限を設定する。正確な情報が収集されるためには、プローブと試料間の相互作用は、すべての画素位置にわたって一定でなければならない。すなわち、プローブと試料の分離は、プローブが1つの画素位置に対応する画像データを収集するのにかかる所要時間よりも短い所要時間で、すなわちラスタ走査がプローブを新しい画素位置に移動する前に、フィードバックシステムによって調整されなければならない。
【0022】
しかし、走査速度が上げられると、AFMは、フィードバックシステムが1つの画素領域内でプローブを設定されたたわみに戻すために十分な時間を持たない、第2の領域に入る。そのため、フィードバックシステムは、データ収集システムに対して遅れをとることになり、高さの情報(垂直方向の調整から得られる)が、当該画素位置におけるプローブ先端の真の高さ(およびしたがって試料の高さ)を反映しないことになる。各画素のサイズを増す(その場合画像の解像度が下がる)か、または走査の速度を落とす(その結果データ収集時間が増大する)ことにより、画素レートを下げなければならない。
【0023】
この制限の影響を低減するために、現在の研究は、フィードバックシステムの速度を向上させる、すなわち、第1の領域の範囲を実質的に拡大することに的を絞っている。ある手法は、2つのアクチュエータを使用して、z方向のカンチレバーの動きを提供する。第1のアクチュエータは、プローブアセンブリを駆動し、その結果制限のあるフィードバック応答が得られる。しかし、プローブと一体で、そのためプローブのみを移動させるように操作可能な第2のアクチュエータが提供される。この2次アクチュエータによって提供される動きの範囲は、第1のアクチュエータによって提供される動きの範囲よりも狭いが、プローブだけに影響するように使用されるので、その応答時間はより短い。このようにして、先端の高さの最初の調整は高速のアクチュエータを介して行うことができ、より低速で広範な調整が後に行われる。しかし、このように一体化された2次アクチュエータを有する入れ子構造のフィードバックシステムを使用しても、限定的な成功しか得られない。これは、一部には、フィードバックシステムの応答の解釈、およびしたがって先端の高さの判定の難しさによる。この情報がないと、表面の形状(または他の試料特性)を正確に推量することができない。
【0024】
これに代わる手法は、カンチレバーのたわみの多少の変動を許すモードでAFMを動作させるものである。このモードでは、カンチレバーのたわみが測定され、そのたわみに関連するデータが収集され、画像を構築するために使用される。したがって、このモードでの動作には、プローブのたわみから有用な情報を抽出するために、改良された測定技術が必要となる。下記でより詳細に説明するように、図1に示す従来技術の検出システムは、このモードで動作するように適合することができるが、そのように適合させると結果として計測情報が失われる可能性があり、これは多くの用途では満足のいくものではない。
【0025】
走査の速度がさらに上げられると、従来技術のAFMが完全に運用に適さない第3の領域に入る。一定の走査速度を超えると、カンチレバー18の過渡運動を引き起こすことが可能となる。すなわち、走査の過程で、先端が例えば試料の表面上の一段高い領域に遭遇すると、先端20は、カンチレバーの梁部の過渡運動を引き起こす可能性のある衝撃を供給する。プローブが表面の輪郭を追跡する際にこの過渡運動が存在すると、その運動は、所与のどの表面位置でもプローブの向きを変動させ、したがってプローブのたわみの監視から得られる情報を制限する。たわみがどのような形でもプローブの高さに関係しなくなる。これについては、J.P.Howard−KnightおよびJ.K.Hobbsにより「Video rate atomic force microscopy using low stiffness,low resonant frequency cantilevers(低剛性、低共振周波数片持梁を用いたビデオ速度の原子間力顕微鏡法)」、Appl.Phys.Lett 93 104101(2008)に記載され、下記でもより詳しく説明する。
【0026】
次いで図1の従来技術のシステムを再度参照すると、プローブの先端20が試料14の表面を追跡するのに伴い、走査線上の各点における先端20の垂直位置が試料14の形状の直接の指示を提供することが明らかである。したがって、厳密に言うと、基準レベル、例えば台12の表面、の上の先端の点20aの高さを測定すると、試料の高さの真の指示が得られる。
【0027】
第1の走査速度の領域では、図1の従来技術のシステムは、単に、領域Aに入射する光の強度と領域Bに入射する光の強度の差を監視する。たわみに特化した測定は行われない。従来技術のAFMは、たわみを一定に保つことだけを要求される点でゼロ化(nulling)システムである。プローブの高さの情報は、一定のたわみを保証するようにフィードバックシステムを操作する駆動体から得られる。
【0028】
次いで第2の走査速度の領域に移ると、従来技術によるシステムを使用して、領域Aに入射する光の強度と領域Bに入射する光の強度の差を測定できることが明白である。すなわち、AFMは、ゼロ化システムではなく、試料の調査の結果として直接データ(強度差)を抽出するシステムとして運用されることができる。そのようなデータは、無論、基準点(例えば台の表面)の上方のプローブの高さに関する情報が測定たわみデータから抽出できるという限りにおいて有用である。
【0029】
検出器の2つの部分間の強度差を測定することにより、明らかに、カンチレバーの後部18bから反射された光の方向の指示が得られる。反射の方向は、カンチレバーの後部18bが傾斜される角度に応じて決まる。小さい角度の場合、傾斜の変化は、カンチレバーの梁部18が回転される角度に等しく、したがって先端20における高さの変化に比例する。図1に示す位置P0、P1、およびP2は、分かりやすさを向上させるために大幅に誇張されており、多くの状況では、カンチレバーの梁部18は著しく湾曲することはなく、上記の小さな角度の概算で十分であることに留意されたい。また、たわみが測定される点は、カンチレバーの梁部の後部18b上の位置であり、先端の点20aの位置ではないことも明らかである。これら2つの点は、先端20の垂直方向の高さに等しい量だけ間隔が空いている。小さなたわみについては、これは、走査の間一定であると仮定することができる。
【0030】
上記の概算に関わらず、たわみを介した先端20の高さの測定は、実施が比較的容易である点でその支持に偏見がある。第1の走査領域では、プローブのたわみの変動を数量化する必要はない。ゼロ化システムでは、プローブのたわみは一定に保たれる。第2の走査領域でも、走査プローブ顕微鏡の動作は、従来、上記の仮定が有効である条件下にある。
【0031】
プローブのたわみを介したプローブの高さの測定に依拠することは普遍的と思われるにも関わらず、直接的な高さの測定の例が、米国特許第5,144,150号(Yoshizumi)、欧州特許第1892727号(Mitutoyo)、および欧州特許第2017599号(Mitutoyo)に記載される。これらの文書に記載される顕微鏡はすべて、干渉計を利用してプローブの高さに関する情報を抽出する。
【0032】
米国特許第5,144,150号は、コンタクトプローブを使用して、球面レンズやフレネル・レンズ等の湾曲表面の形状や、半導体のパターニングの形状を測定することを記載する。そのような表面を測定する際の問題は、例えばプローブが表面の特に高い領域を追跡する時にカンチレバーの梁部が湾曲すると、試料表面に許容できない圧力がかかる可能性があることである。その解決法は、試料表面が走査される際にカンチレバーの梁部の湾曲が実質的に一定に保たれるようにすることである。これは、カンチレバーの基部をいわゆる光学プローブに接続することによって実現される。光学プローブは、先端上方のカンチレバーの梁部の後部に焦点を結ぶ。先端が基部に対して移動すると(すなわち梁部が湾曲すると)、先端が光学プローブの焦点から離れる。そして、光学プローブが物理的に動かされて、先端を焦点に戻し、先端と光学プローブの分離を保つようにする。このいわゆる「自動焦点システム」は、光学プローブとカンチレバー基部の接続を通じて、カンチレバーが確実にその元の湾曲構成に戻るようにする。換言すると、光学フィードバックシステムが使用されて、カンチレバーを実質的に一定のたわみに維持する。この限りにおいて、この構成は、上記の一定相互作用モードで動作する従来技術のAFMシステムに似る。
【0033】
カンチレバーの梁部を動かしてたわみ位置を維持するために必要な垂直方向の距離から単にプローブのz位置を抽出する一定相互作用のAFMと異なり、米国特許第5,144,150号の顕微鏡は、干渉測定を用いて先端の後部の速度を直接測定する。その速度情報から、走査中の特定の点におけるプローブの高さが推定されることができる。プローブの速度は、先端の後部から反射されたレーザビームの参照ビームとの干渉によって測定される。ビームは、移動するプローブからの反射時にドップラー周波数シフトを起こす。このように干渉の測定を用いることにより、プローブのたわみに依存しないプローブの高さの指示、または関連するカンチレバーの梁部の高さの指示が得られる。
【0034】
しかし、米国特許第5,144,150号に記載される構成は、走査速度に課されるどの制限も克服しない。この構成は第1の領域でしか運用することができない。カンチレバーのたわみを維持するフィードバックシステムは、たわみの変化に瞬時に反応することができず、そのため走査速度が制限され、画像の画素を収集する際にかかる時間が、自動焦点フィードバックシステムの応答時間よりも長くなる。この従来技術のシステムが、プローブの傾きに関係なく干渉測定システムのレーザビームがプローブの後部から反射されてその入射経路に沿って戻ることを保証する第2のフィードバックシステムを備えることは、注目に値する。すなわち、これら2つのシステムのうち低速の方のシステム応答時間で走査速度が制限される。
【0035】
Mitutoyoによる2つの出願、欧州特許第1892727号および欧州特許第2017599号は、プローブ顕微鏡を操作する際の精度、およびしたがって画像の解像度の向上に関する。これは、干渉測定を使用して、固定された基準点に対するプローブの高さの直接の測定値を抽出することによって達成される。一実施形態では、プローブの後部から反射されたビームが参照ビームと干渉し、経路差が抽出される。これにより、走査装置で発生する運動エラーの問題が克服される。プローブ先端のz方向の運動は、純粋に試料表面の形状から生じる。走査装置のエラーが生じるとプローブを湾曲させるが、それが直接の高さの測定に影響することはない。
【0036】
欧州特許第1892727号に記載されるシステムは、フィードバックシステムは一切使用しない。すなわち、プローブの過度の湾曲を防止するための調整は行われず、したがって、このシステムは、非常に平坦な表面の走査に限定される。
【0037】
欧州特許第2017599号は、フィードバックが実施される、以前のMitutoyoの出願に記載される装置を発展させた装置を記載する。このフィードバックシステムは、単一のセンサを使用してプローブの接触力(フィードバック信号)と変位(高さ)の両方を検出する点で、前述のフィードバックAFMの従来技術と比べて簡略化されている。走査時に、小さな垂直方向の高周波振動(ディザー)がプローブに与えられる。この振動の振幅が、相互作用力の強さについての情報を提供する。したがって、干渉計で測定された直接の高さ信号は、ディザーから生じた高周波成分と重畳された、試料の高さの変動に対応する低周波成分を含む。信号処理時に、フィルタが使用されて2つの成分を分離する。高周波成分の振幅を一定に保つために、プローブの基部の高さが調整される。しかし、この構成は、走査速度に課される制限はどれも克服できない。正確なデータ結果は、フィードバックシステムが表面の高さの変化に応答するのに十分な時間を有する場合、すなわち、画像データの収集点間でディザーの振幅が一定に保たれた場合にのみ得ることができる。より高いレートでデータを収集することはできない。これは、第1には、振幅を測定するには複数回の周期(この例では5〜10回)にわたって振動を監視することが必要であり、第2には、z方向駆動システムには、振幅を設定値に回復するためにプローブ位置を調整する時間を与えなければならないためである。したがって、この装置も、第1の走査領域でしか運用することができない。
【0038】
要約すると、従来技術のプローブ顕微鏡は、上記で明らかにした第1の(低速の)走査領域以外での動作には適さないか、または適用が比較的平坦な試料に限定されるかのいずれかである。
【0039】
従来技術のプローブ顕微鏡に伴う不備は、第3の走査領域における非常に高い速度、すなわち、カンチレバーの過渡運動を引き起こすのに十分な速度で走査を試みる際に遭遇するさらなる問題を考えるとさらに際立つ。そのような状況が発生するのは、例えば試料表面の一段高い領域に遭遇した時に与えられる衝撃に対するカンチレバーの応答が、カンチレバーの第1の制約された共振の周波数を上回る場合である。そのような状況では、先端におけるカンチレバーの傾斜は、恐らくはその定常状態(設定点)の傾斜と異なる大きさであるだけでなく、反対方向である可能性もある。過渡運動は、カンチレバーの角度を位置および時間とともに変化させる。この問題を、図2を参照して具体的に説明する。
【0040】
先端が試料表面との接触によって制約を受けるか、または自由であるか、の2つの可能なカンチレバーの機械的状態が存在することに留意されたい。これらの状態におけるカンチレバーの共振条件を、それぞれ「制約された共振」および「無制約の共振」と呼ぶ。
【0041】
図2a、b、c、dに、プローブ先端20が試料14の表面から衝撃を受け取った各種状況を示す。上記と同様に、プローブ16は、カンチレバーの梁部18に接続された先端20を備える。試料に最も近いプローブの点20a、および、たわみの測定に使用されるカンチレバーの後部18bが示される。カンチレバーの後部18bの定常状態の名目位置が点線40で示される。「名目」とは、フィードバックが作用していた場合に後部18bが保持されるはずの位置を意味する。すなわち、図1のプローブの向きP1に相当する。入射光ビームLが各図の右側に示され、左には、名目位置にあるプローブについての予想反射方向42を点線で示す。すなわち、点線42は、図1のD1に相当する。
【0042】
図2aおよび2bでは、試料表面の位置が実線44で示される。この表面上の位置44は、実質上くぼみであり、この例を分かりやすくするために、先端20は表面を追従し、名目位置から下方に引っ張られる。図2aは、試料から受け取られる衝撃(下方への動きを生じさせる)が、カンチレバー18の整定時間よりも長い所要時間で、比較的低速な状況を示している。すなわち、過渡運動は、プローブが表面の外形に反応する時間内に減衰する。先端20が降下して表面44と接触すると、カンチレバーの梁部18が下方に湾曲し、カンチレバーの後部18bが図の左側に向かって傾けられる。そのため、測定用の光ビームLは、カンチレバーの後部18bから経路46に沿って反射される。したがって、矢印48で示すように、ビームの出射経路は反時計方向にずれた状態で検出される。対比として、図2bに、試料14から受け取られる衝撃がカンチレバー18の整定時間よりも短い持続時間にある時のプローブ16の瞬間的位置の例を示す。先と同様に、先端20は下方に表面レベル44まで引っ張られるが、カンチレバー18の過渡振動は、カンチレバーの長さにわたってリップルが観察されることを意味する。したがって、プローブの瞬間的な位置関係は図2bに示すようになる可能性がある。そのため、カンチレバーの後部18bは、リップルが伝播する時に、試料とのプローブの接触点20aを中心として揺動する。カンチレバーの後部18bが右に傾いた瞬間的位置を図2bに示す。この瞬間、光ビームLは、経路50に沿って反射される。したがって、ビームの出射経路は、矢印52で示すように時計方向にずれて観察される。
【0043】
このように、同じ表面位置を追跡するにも関わらず、プローブのたわみの瞬間的な測定で、図2aおよび2bに示す対照的な状況にある反対の結果が生じることが理解できる。
図2cおよび2dでは、実線54で示すように試料表面の位置が高くされている。したがって、この表面位置54はピークを表し、表面を追従する先端20は、名目位置から上方に持ち上げられる。図2cは、この動きを生じさせる試料から受け取られる衝撃がカンチレバー18の整定時間よりも長い所要時間で、比較的低速な状況を示している。すなわち、過渡運動は、プローブが表面の外形に反応する時間内に減衰する。先端20が表面54と共に上昇すると、カンチレバーの梁部18が上方に湾曲し、カンチレバーの後部18bが図の右側に向かって傾けられる。したがって、調査用の光ビームLは、カンチレバーの後部18bから経路56に沿って反射される。したがって、ビームの出射経路は、矢印58で示すように、時計方向にずれて観察される。図2bと同様に、図2dは、試料14から受け取られる衝撃がカンチレバー18の整定時間よりも短い持続時間である時のプローブ16の瞬間的位置の例を示す。図2cと同様に、プローブの先端20aは表面レベル44と共に持ち上げられるが、カンチレバー18の過渡振動は、過渡モードがカンチレバーの長さにわたって伝播する際にリップルが観察されることを意味する。すなわち、カンチレバーの後部18bは、表面とのプローブの接触点20aを中心として揺動する。その瞬間的な位置関係は例えば図のようになる。図2dの例では、カンチレバーの後部18bは左に傾けられる。この瞬間、光ビームLは、経路60に沿って反射される。したがって、ビームの出射経路は、矢印62で示すように反時計方向にずれて観察される。
【0044】
この場合も、過渡運動が引き起こされた場合、すなわち、プローブが表面上を走査する速度が、カンチレバーの整定時間よりも短い時間枠内にプローブが表面の特徴に反応するような速度である場合には、同じ表面位置54の測定で対照的な結果が生じることが認められる。
【0045】
第3の速度の領域の開始を定義する制限は、画素の収集期間(画像中の1画素に対応する表面部分の画像化にかかる平均時間)がカンチレバーの整定時間よりも短くなること、と言い換えることができる。
【0046】
図2bおよび2dに示すプローブ16の位置は瞬間的なものであることを理解されたい。過渡モードはカンチレバーの梁部18に沿って伝播し、減衰させられない場合は、カンチレバーの後部18の揺動、およびその結果生じる反射ビームの方向の短時間の変動として観察される。例えば低いQ係数でカンチレバーの梁部を使用することで過渡モードが減衰された場合には、後部18bの最初の傾斜の動きがより早く整定することになる。
【0047】
PCT特許出願WO2005/008679には、不均一な試料表面の形状を測定する能力がより高いハイブリッド型システムが記載される。試料表面上で先端を追跡する改良された機械システムが、電子フィードバック機構と組み合わせて実施される。電子フィードバック機構は、画素収集レートよりも大きい所要時間ではあるものの、プローブの基部と試料支持体との垂直方向の分離を調整するために使用される。一般に、これらのフィードバック調整は、複数の走査線にわたる期間にわたって行われるが、各走査線内で、試料表面上の先端の高さの変動が測定されなければならない。1本の走査線の規模では試料表面は十分に平坦であって検出システムの制限が厳し過ぎないものと仮定される。測定された高さの変動から、各走査線に沿って表面形状の変動の画像を形成することができ、電子フィードバック信号が使用されて各走査線を基準レベルに調整する。この改良された機械的追跡システムは、先端が凹凸に遭遇した時に先端を表面とより接触させておくために必要とされる。それにより、各走査線の所要時間内により正確な高さ情報を収集することが可能になる。しかし、この従来技術の装置は、第2の速度領域で動作することは可能であるが、カンチレバーの過渡モードは考慮しない。より優れた追跡が提供され、それにより第3の領域の開始が遅れるが、このような顕微鏡は、第3の領域内で動作した場合になお正確な結果を得ることができない。
【発明の概要】
【発明が解決しようとする課題】
【0048】
本発明の目的は、フィードバックパラメータを所定値に維持するためにフィードバックシステムによって設定された制限を超える速度でプローブ先端が試料表面を走査する時のプローブ先端の高さに関する情報を抽出することが可能な、操作プローブ顕微鏡と共に使用するための検出システムを提供することである。詳細には、本発明の目的は、プローブが過渡運動を受けている間に有用な情報を抽出することが可能な検出システムを提供することである。
【課題を解決するための手段】
【0049】
したがって、本発明は、走査型プローブ顕微鏡とともに使用する検出システムを提供し、このシステムは、基部端および自由端を有しかつ自由端は鋭利な先端を支持するカンチレバーを備えたプローブを照明するビームを生成する光源と、プローブから反射された光を集光する集光手段とを備え、ビームは、プローブ先端近傍のプローブの上部表面を照明し、反射された光は、プローブの上部表面のたわみの指示がそこから取得される第1の成分と、基準点に対するプローブの上部表面の位置に関する情報を第2の成分から抽出するように構成された高さ検出システムに送出される第2の成分、の2つの成分を含む。
【0050】
この構成は、この検出システムを使用して3つの動作領域すべてにわたって試料表面の画像を形成できるという利点を有する。本発明の文脈では、「たわみ」は、本明細書に記載される従来技術で明らかである意味に限定されると解釈すべきではない。「たわみ」は、プローブの上部表面の向きもしくは傾斜の角度(従来技術と同様)、またはカンチレバーの向きから導出される何らかの他の角度の測定結果を包含するものと解釈されたい。それには、カンチレバーの自由端と基部端(またはカンチレバーの長さ上にある他の位置)の間の垂直方向の分離から導出される測定結果も含まれることができる。簡単に言うと、カンチレバーの「たわみ」は、プローブと試料との相互作用の結果カンチレバーに生じる湾曲の形状の何らかの計測結果と理解すべきである。プローブの上部表面のたわみを監視することにより、フィードバックが使用されてプローブ先端と試料の間の平均相互作用力を一定に保つことが可能になる。これには、過度に高い相互作用力が加わった結果試料および/またはプローブに加わりうる応力を制限する効果がある。一方、高さ検出システムで測定される経路差は、プローブの高さの直接的な測定である。カンチレバーのたわみに関係なく、この測定結果は、基準点によって設定される位置に対するプローブ高さの真の指示である。この測定はたわみと無関係なので、フィードバックシステムの応答時間にも、また可能性としては、過渡運動の存在にも影響されず、過渡運動は、カンチレバーのたわみを動的に変える可能性があるが、カンチレバーの高さには影響しない。
【0051】
高さの測定がたわみと無関係である結果、さらに、プローブ基部の垂直(z)方向の高さの知識を有する必要がない。従来技術のAFMシステムでは、画像を形成するデータを抽出するために、基部の高さが測定される。本発明によるAFMでは、画像は、干渉計の出力から直接形成される。したがって、従来技術では、基部の垂直(z)方向の高さを制御する駆動システムへの入力信号が、達成された実際の高さに照らして較正されなければならないのに対して、本発明ではそのような較正の必要性がない。
【0052】
理想的には、高さ検出システムは、反射光の第2の成分と高さ参照ビームとの経路差を検出するように構成された干渉計を備える。そのような干渉計は、この光路差、したがってプローブの相対的な高さの正確な測定結果を生成することができる。好ましくは、干渉計は、一対の直交位相のインターフェログラムを生成する手段を含むホモダイン干渉計であり、インターフェログラムは、複数の干渉縞にわたる正確な干渉縞計数技術にかけることができる。これにより、高さ検出システムの精度が向上し、検出可能なカンチレバーの動きの範囲が拡大する。直交位相のインターフェログラムは、分相性の被覆を有するビームスプリッタで生成されることができる。
【0053】
第1の成分は干渉計にも送出されることができ、干渉計は、反射光の第1の成分と、自由端から離れたカンチレバー上の位置、好ましくは基部端の位置によって長さが定義される光路に沿って伝播するたわみ参照ビームとの光路差を検出し、それによりカンチレバーの傾斜についての情報を提供するようにさらに構成される。すなわち、この例では、たわみの測定結果は、カンチレバーの自由端と、カンチレバーの長さに沿った第2の位置との間の垂直方向の高さの差から得られ、実質的にはカンチレバーの平均傾斜の測定値である。この実施形態では、干渉計が使用されて、高さの情報とたわみの情報両方を抽出することができ、それにより、必要な構成要素の数が減る。
【0054】
あるいは、第1の成分はたわみ検出器に送出されてもよく、たわみ検出器は、プローブの上部表面のたわみの指示を提供するように構成される。したがって、従来技術から知られている任意のたわみ検出器を使用して、たわみ信号が得られる。
【0055】
具体的には、たわみ検出器は第2の干渉計であってよく、第2の干渉計は、反射光の第1の成分と、自由端から離れたカンチレバー上の位置、好ましくは基部端の位置によって長さが定義される光路に沿って伝播するたわみ参照ビームとの光路差を検出するように構成される。あるいは、たわみ検出器は分割フォトダイオードであってもよく、分割フォトダイオードは、反射光の第1の成分が、プローブの上部表面の向きの角度によって決まる相対的強度で、ダイオードの2つの部分に入射するように配向される。
【0056】
このシステムは、反射光を上記で参照した第1および第2の成分に分割するように構成されたビームスプリッタも備えることができる。
プローブは、好ましくは、カンチレバーの自由端の近傍に取り付けられた先端を備え、カンチレバーは基部端で支持され、ビームで照明されるプローブの上部表面は、先端の上方にある。
【0057】
プローブは、プローブの先端を移動させるように動作可能なアクチュエータも含んでよい。一実施形態では、プローブ先端の移動は、プローブ先端の領域内でプローブの上部表面の向きの角度を変えることによって達成されることができる。このアクチュエータは、プローブアセンブリおよび/または支持台を垂直方向に移動するように構成されたどの駆動体よりもはるかに小さな負荷を駆動するように構成される。この理由から、より迅速なフィードバック応答の可能性をもたらす。従来技術の入れ子構造のフィードバックシステムもこのような一体化されたアクチュエータを利用するが、フィードバックループの解釈、および、したがってプローブの高さの判定がやや複雑になるという不利点がある。本発明のこの実施形態は、フィードバックアクチュエータが駆動される位置に関係なく、プローブの高さが直接測定されるので、この不都合点を回避する。
【0058】
第2の態様で、本発明は、試料とプローブの間の相互作用に従って試料を画像化する走査型プローブ顕微鏡を提供し、この顕微鏡は、プローブと試料の表面との間に相対的な運動を提供するように構成された駆動手段と、本明細書に記載のプローブ検出システムとを備える。
【0059】
駆動手段は、好ましくは、試料表面に実質的に平行な面でプローブと試料表面との間に相対的な運動を提供するように構成されたXY走査装置と、試料表面に直交する方向の相対的な運動を提供するように構成されたZ方向駆動体とを備える。そのような構成では、プローブ検出システムから取得されるプローブの上部表面のたわみの指示は、Z方向駆動体を内蔵したフィードバックシステムに付加されることができ、Z方向駆動体は、プローブのたわみを設定レベルに戻すように構成される。Z方向駆動体は、プローブの基部および/またはプローブと一体のアクチュエータを移動するように構成され、プローブ先端を移動するように構成された基部駆動体を含むことができる。
【0060】
従来技術のAFMと異なり、このフィードバックシステムは、XY走査装置が画像画素間でプローブを移動するのに要する所要時間より長い所要時間で動作し、本発明の顕微鏡で記録される画像の品質に悪影響を及ぼすことがない。
【0061】
XY走査装置は、好ましくは、プローブと支持体、または試料と支持体を、プローブまたは試料支持体の共振周波数または共振周波数の近傍で振動させるように構成された共振器を備える。
【0062】
第3の態様で、本発明は、試料とプローブの間の相互作用に従って試料を画像化する走査型プローブ顕微鏡を提供し、この顕微鏡は、プローブと試料の表面との間に相対的な運動を提供するように構成された駆動手段と、試料表面に実質的に直交する方向における、基準点に対するプローブの位置の指示を提供するように構成されたプローブ検出システムとを備え、
プローブは、基部端および自由端を有するカンチレバーを備え、自由端は鋭利な先端を支持し、
駆動手段は、試料表面に実質的に平行な面でプローブと試料表面との間に相対的な運動を提供するように構成されたXY走査装置を備え、走査装置は、プローブまたは試料と支持体を、プローブまたは試料支持体の共振周波数または共振周波数の近傍で振動させるように構成された少なくとも1つの共振器と、試料表面に実質的に直交する方向の相対的な運動を提供するように構成されたZ方向駆動体とを備え、
プローブ検出システムは、プローブを照明するビームを生成する光源と、プローブから反射された光を集光する集光手段であって、ビームはプローブ先端近傍のプローブの上部表面を照明する、集光手段と、プローブから反射された光から、基準点に対するプローブの上部表面の位置に関する情報を抽出するように構成された高さ検出システムとを備える。
【0063】
高さ検出システムは、理想的には、プローブから反射された光と高さ参照ビームとの経路差を検出するように構成された干渉計を備える。
第4の態様で、本発明は、走査プローブの上部表面から反射された光を検出する方法を提供し、この方法は、上部表面のプローブ先端の真上の点に光ビームを誘導し、上部表面から反射された光を集光し、その光を、基準レベル上方のプローブ先端の高さを示す画像を形成するように構成された高さ検出器に誘導するステップを含む。
【0064】
理想的には、上記方法の前に、上部表面上のプローブ先端の真上の点を特定するステップが含まれる。このステップは、好ましくは、
(a)上部表面上に光を誘導するステップ、
(b)プローブをプローブの先端を中心として振動させて上部表面の角度を変えるステップ、
(c)高さ検出器の出力を監視するステップ
(d)光が入射する上部表面上の点の位置を変えるステップ、および
(e)プローブを傾斜させた結果高さ検出器の出力中に見られる変動が最小になるまで、ステップ(c)および(d)を繰り返すステップを含む。
【0065】
これにより、画像品質に過渡運動が及ぼす影響を最小にするための利便な技術が得られる。
プローブは、好ましくは、基部端で保持されかつ自由端または自由端近傍で先端を支持するカンチレバーを備え、ビームによって照明されるプローブの上部表面は、カンチレバーの自由端または自由端近傍にある。
【0066】
あるいは、表面上の点を特定する上記ステップは、
(a)カンチレバーの上部表面上に光を誘導するステップ、
(b)先端を固定位置に維持しながらカンチレバーの基部を垂直方向に移動して、カンチレバーの向きの角度を変えるステップ、
(c)高さ検出器の出力を監視するステップ、
(d)光が入射する上部表面上の点の位置を変えるステップ、および
(e)プローブの基部を移動した結果高さ検出器の出力中に見られる変動が最小になるまで、ステップ(c)および(d)を繰り返すステップ
を含む。
【0067】
プローブの向きの指示からフィードバック信号が得られる実施形態では、フィードバック信号は、プローブが事前に設定された向きに戻されるように基部の高さの調整を行わせるようになっており、次いで、カンチレバーの基部を垂直方向に移動するステップは、事前に設定された向きを変化させることによって達成されることができる。
【0068】
あるいは、上部表面上の点を特定する上記ステップは、
(a)上部表面上に光を誘導するステップ、
(b)既知の距離だけプローブ先端を変位させ、好ましくは、既知の高さの変動を有する試料上でプローブを走査するステップ、
(c)高さ検出器の出力を監視するステップ、
(d)光が入射する上部表面上の点の位置を変えるステップ、および
(e)高さ検出器の出力が、既知の変位について予想される出力と一致するまで、ステップ(c)および(d)を繰り返すステップを含むことができる。
【0069】
あるいは、上記ステップは、
(a)上部表面上に光を誘導するステップ、
(b)プローブの過渡運動を引き起こすのに十分な速度でプローブを走査するステップ、
(c)高さ検出器の出力を監視するステップ、
(d)光が入射する上部表面上の点の位置を変えるステップ、および
(e)過渡運動の結果高さ検出器の出力中に見られる変動が最小になるまで、ステップ(c)および(d)を繰り返すステップを含むことができる。
【0070】
第5の態様で、本発明は、走査型プローブ顕微鏡を使用してデータを収集する方法を提供し、この方法は、
(a)基部端および自由端を有し、自由端が鋭利な先端を支持するカンチレバーを備えるプローブを、試料表面の近傍に移動するステップ、
(b)プローブの上部表面上の先端の真上の点に光ビームを誘導するステップ、
(c)プローブの上部表面から反射された光を集光および分析しながら、試料表面上でプローブを走査するステップを含み、集光された光の第1の成分の分析によって得られるフィードバック信号に応答してプローブの基部を垂直方向に駆動するようにZ方向駆動体が動作し、集光された光の第1の成分から、プローブの上部表面のたわみの指示が得られ、集光された光の第2の成分は、第2の成分と高さ参照ビームとの間の経路差を検出するように構成され、基準レベル上方のプローブ先端の高さを示す画像を形成するように構成された干渉計に送出され、フィードバック信号への応答は、複数の画像画素が収集される所要時間よりも長い所要時間にわたる。
【0071】
次いで本発明の実施形態について、添付図面を参照して、単なる例として説明する。
【図面の簡単な説明】
【0072】
【図1】典型的なたわみ検出システムを示す、従来技術の原子間力顕微鏡の構成要素の概略図である。
【図2】図2(a)は、カンチレバーの過渡運動が観察される閾値より下の走査周波数で画像化する際にとりうる先端およびカンチレバーの向きの例の図である。図2(b)は、カンチレバーの過渡運動が観察される閾値より上の走査周波数で画像化する際にとりうる先端およびカンチレバーの向きの例の図である。図2(c)は、カンチレバーの過渡運動が観察される閾値より下の走査周波数で画像化する際にとりうる先端およびカンチレバーの向きの例の図である。図2(d)は、カンチレバーの過渡運動が観察される閾値より上の走査周波数で画像化する際にとりうる先端およびカンチレバーの向きの例の図である。
【図3】本発明によるプローブ検出システムを有する原子間力顕微鏡の構成要素の概略図である。
【図4】高速走査型プローブ顕微鏡に組み込まれた、本発明によるプローブ検出システムの概略図である。
【図5】本発明による、干渉測定を用いた高さ検出システムの概略図である。
【図6】高さが測定されるカンチレバーの後部上の点を変化させた影響を示す概略図である。
【図7】試料表面の走査を実行する準備として本発明の検出システムを位置合わせするために使用される装置の概略図である。
【発明を実施するための形態】
【0073】
図3を参照すると、本発明の一態様により構築された検出器の第1の実施形態を利用するAFMの実装が概略的に示され、全体を70で表す。上記で図1を参照して説明した従来技術のAFMと共通の要素には同一の参照符号を付す。したがって、図のAFM装置は、その表面がプローブ16で調査される試料14を受けるように適合された可動式の台12を備える。プローブ16は、カンチレバーの梁部18および先端20を備え、先端20は点20aに向かって先細になり、カンチレバーの梁部18の一端に向かって配置される。カンチレバーの梁部18の他端は、支持台22によって支持される。
【0074】
1つまたは複数の駆動モータ(72。図示せず)が使用されて、試料14(台12と共に)および/またはプローブ16を、x、y、およびz方向の3次元で相互に相対的に走査できるように駆動する。当分野の慣習に従い、デカルト座標系のz軸は、試料14によって占められる面に直交する軸と解される。すなわち、プローブ16と試料14間の相互作用力の強さは、試料14上での先端20のxy位置(先端20が画像化する画素)および試料上の先端20の高さの両方に依存する。
【0075】
各種駆動モータの中で、z方向位置決めシステム72が本発明の目的には最も有力である。z方向位置決めシステム72は、先端20を試料14に向かう方向および離れる方向(z方向)に動かすように動作可能な圧電駆動体を備える。この実施形態では、z方向位置決めシステムは、プローブの支持台22に接続される。あるいは、試料台12に接続してもよく(図1に示す)、また、音声コイルや熱バイモルフ・アクチュエータ等の非圧電駆動機構を備えてもよい。さらなるモータが、支持台22、台12、またはその両方に接続され、先端20が試料14上をラスタ方式または他の方式で走査するように、試料面(x、y)において試料14と先端20間の相対的な運動を提供するように動作可能である。
【0076】
一実施形態では、z方向位置決めシステムは、上記のように台(または支持台)の駆動体、および、プローブ自体と一体化された追加的なアクチュエータの両方を備えることができる。この一体型アクチュエータを使用して、アセンブリ駆動体を用いて可能なよりも高速のフィードバック応答でプローブのたわみを駆動することができる。
【0077】
プローブ16は、ローマス(low-mass)AFMプローブであり、走査時には先端20と試料表面の間に相互作用力が発生する。プローブ検出機構74については下記でより詳細に説明するが、先端20上方のカンチレバーの後部の点18bの垂直(z)方向の変位とたわみ(傾斜)両方の指示を得るように構成される。垂直方向の変位に関するデータが分析され、ディスプレイ(図示せず)に出力される。カンチレバーの後部18bの傾斜/たわみに関する情報は、フィードバックコントローラ30に入力され、コントローラ30は、z方向位置決めシステム72の駆動機構に接続される。
【0078】
便宜上、「垂直方向の」という表現は、顕微鏡システムのz方向の動きに適用されることに留意されたい。前述の解説から、これは、顕微鏡のz軸が垂直方向に位置合わせされる状況を限定する意図はないことが明らかである。顕微鏡は、目的に合わせて任意の利便な向きで配置されることができる。
【0079】
プローブ16は、一般に、(AFMの場合)シリコンまたは窒化シリコンで作製され、従来技術との関連で上述したような形状および大きさに形成される。
試料の画像を撮影する際、AFM70は以下のように動作する。z方向位置決めシステム72およびさらなる駆動体を使用して、まず試料14がラスタ(x、y)走査の開始位置で先端20と接触させられる。従来、AFMの術語では、先端20は、原子相互作用力が斥力領域にある時に、試料14と接触していると表現される。プローブ16が試料表面と接触すると、したがって、先端20が上方に向けて引っ張られる。先端から離れた方の側にあるカンチレバー18の基部は、支持台22によって、所定の位置に固定され、それによりカンチレバー18が上方に湾曲、またはたわむ。従来のように、また従来技術に関連して上述したように、支持台22が降下され、カンチレバーの湾曲が所定レベルに達するまでプローブ16を試料14に向けて移動させる。この所定レベルが、フィードバックコントローラ30の設定点となる。
【0080】
走査が進行すると、先端20は、試料表面の高さが変動するのに伴って上下に移動する。先端が移動するのに伴って、傾斜の度合いが変化し、それにより、フィードバックコントローラ30に供給される信号が変更され、z方向位置決めシステム72が調整される。プローブの基部がフィードバックに応答して調整される際、以下の考慮事項が適用される。先端が試料上を速度vで移動する時、先端は試料表面を追跡し、したがってvに比例する率ftrackで表面高さの変動に遭遇する。減衰時間または整定時間τの過渡運動がカンチレバー中に引き起こされる。フィードバックシステムの応答時間は、フィードバックシステムがフィードバックパラメータの変化を検出し、それに応じてプローブ基部の高さを調整するのにかかる時間である。
【0081】
3つの走査速度領域が特定されることができる。
・フィードバックシステムの応答時間がデータ収集点間の時間間隔よりも短い場合、フィードバックシステムは、プローブが1つの画像点で表面の高さに関するデータを収集している間にプローブの高さを調整するのに十分な時間を有する。すなわち、すべての画像点について、プローブが一定のたわみにあるとみなすことができ、したがって、プローブと試料の間の相互作用力も一定とみなすことができる。これが第1の速度領域であり、この領域では、フィードバックを使用する従来技術のシステムは、正確な表面情報を抽出することができる。しかし、本発明の装置は、プローブの高さに関する情報が検出システム74によって直接得られる点で従来技術と異なる。
・フィードバックシステムの応答時間がデータ収集点間の時間間隔より長い場合は、フィードバックは、一定の平均たわみを維持するようにのみ働く。この第2の領域では、先端の速度は、フィードバックシステムの応答時間で対応できるよりも高い頻度で表面の変動が追跡されるような速度であり、したがって、そのような変動は、プローブ高さ検出システムによって直接測定されなければならない。フィードバック信号は一定の平均たわみを維持するために使用され、一定のたわみは、プローブ、試料、またはその両方の損傷を引き起こす可能性のある極端な相互作用の強度をプローブが経験しないように作用する。
・第3の走査領域では、カンチレバーの整定時間がデータ収集点間の時間間隔よりも長く、カンチレバー中で引き起こされる過渡運動が、プローブが後続の試料領域の画像化に移るまでに減衰しない。しかし、本発明の高さ検出システムは、そのような運動があってもプローブの高さの測定値を抽出することができる。それにより、先端が試料と接触した状態を保っていれば、試料の高さの指示が得られる。
【0082】
これらの領域には広い定義が与えられ、各領域の開始は、特定の動作条件、ならびに顕微鏡および調査対象の試料のパラメータに明らかに依存する。
次いで、本発明による検出システム74の動作をより詳細に説明する。光源(図示せず)がレーザビーム76を発し、ビーム76は、対物レンズ78によりカンチレバーの後部18b上で焦点を結ぶ。反射光80a、b、cがレンズ78で収光され、非偏光ビームスプリッタ82に誘導される。図3から分かるように、カンチレバー18bの傾斜が光の反射角度に影響する。プローブが設定フィードバック位置に維持された場合、反射ビームは経路80bをたどる。一方、カンチレバーの後部18bが(図を基準として)左に傾けられた場合、反射ビーム80aは反時計方向に偏向され、右への傾斜は、反射ビーム80cを時計方向に偏向する。カンチレバーの後部18bがレンズ78の焦点または焦点の近くに位置する時には、反射ビームの角度の変動が、レンズを通った後の横方向の変位に変換される。すなわち、カンチレバーが左に傾斜すると、反射ビームの左方への横方向変位が生じ、右に傾斜すると、設定フィードバック位置に対して右への変位を生じさせる。
【0083】
ビームスプリッタ82は、入射する光の実質的に半分84a、b、cを90度反射し、残りの半分86a、b、cを透過させるように構成される。透過した成分86a、b、cは、干渉計88に入力される。この干渉計の動作については、下記で図5を参照してより詳細に説明する。要約すると、反射ビーム86a、b、cは、台12の上部表面から反射された参照ビームと干渉する。あるいは、台表面との間に既知の関係を有する別の固定点が使用されてもよい。これにより、2つのビーム間の経路の差、および、したがって、台表面上方のカンチレバーの後部18bの高さの指示が得られる。この測定された高さの変動が抽出されて、画像を形成する。
【0084】
ビームスプリッタ82から反射された成分84a、b、cは、レンズ90によってたわみ検出器28上に集光される。従来技術と同様に、検出器28は、その長さにわたって、独立した検出器領域AおよびBに分割される。これらの領域から生成される出力信号は、差動増幅器92に入力され、増幅器92は、2つのチャネル間の差に等しい信号を出力する。検出器28は、カンチレバーの後部18bが設定たわみ位置に傾けられると差動増幅器からの出力も設定点になるように、集光の光学諸特性と位置合わせされる。すなわち、反射光80b、84bは、チャネル出力の差が設定値になるようにチャネルAとBに分散される。カンチレバーの後部18bの左への傾斜は、検出器28からの信号がチャネルBで増加し、差動増幅器92からの出力の減少につながることを意味する。逆に、右への傾斜は、チャネルAが信号の増大を受け、差動増幅器92で出力の増加が生じることを意味する。フィードバックコントローラ30は、差動増幅器92から受け取られる信号をその設定点に維持するように、z方向位置決めシステム72を操作する。
【0085】
フィードバック信号と無関係に、またはそれと同等にカンチレバーのたわみと無関係に、表面上のプローブの真の高さが干渉測定高さ検出システムで測定される。したがって、フィードバックシステムが使用されて、平均のたわみが一定レベルに維持されることを保証する。
【0086】
検出システムの光76がカンチレバーの後部18b上で焦点を結ぶことが重要である。この理由から、z方向位置決めシステムは、対物レンズ78にも接続され、プローブ16が上昇または降下されると、レンズ78が等しい量だけ上昇または降下されるように構成される。代替実施形態では、対物レンズ78は、先端からの予想される動きの範囲より大きな焦点深度を有するように選択される。そのため、先端20に対して対物レンズの位置を調整する必要はない。
【0087】
本発明について、原子間力顕微鏡を示す図3との関連で説明するが、この検出システムは、プローブ先端の高さを正確に判定することが重要であるすべての走査型プローブ顕微鏡に使用できることが分かることに留意されたい。
【0088】
さらなる実施形態では、(x、y方向)走査駆動機構(図には図示せず)およびz方向位置決めシステム72は、圧電とは限らない任意の適切な駆動手段に置き換えることができる。それらの駆動体は、試料台12、プローブ支持台22、または両者の組み合わせに接続されることができる。
【0089】
上記のたわみ検出器28は、カンチレバー18のたわみを測定する代替の知られた手段に置き換えられてよい。例えば、カンチレバーは、一体化された圧電抵抗センサと共に形成されることができる。カンチレバーの高さを測定するために使用されるシステムと同様の高さ検出システムが、たわみの測定にも使用されてよい。すなわち、干渉計が使用されて、カンチレバー基部の高さに対する先端20の高さを測定する。
【0090】
本実施形態で使用される光源はレーザ光源であるが、代替の光源も利用可能である。干渉測定による検出のためには、光は、干渉計の仕様で必要とされる程度にコヒーレントでなければならない。
【0091】
カンチレバーの過渡運動は、フィードバックが実施されることが可能な速度に根本的な制限を与える。カンチレバーは、フィードバックシステムがたわみを測定および調整するのにかかる時間内に整定できるようにされなければならない。そうでないと、過渡運動により、不正確なたわみ情報が生成される。たわみを測定する種々の方法は、それに応じて、わずかに異なる制限をフィードバック制御システムに課す。カンチレバーの角度を使用してたわみを測定する際、フィードバック制御システムの応答時間は、制約されるカンチレバーの整定時間より大きくなければならない。ただし、高さ検出システム(上記で参照した干渉計等)を使用する場合は、フィードバック制御システムの応答時間は、制約のないカンチレバーの共振周波数のみで制限される。
【0092】
本発明の検出システムと共に使用するのに特に適した代替のAFM装置を図4に示す。図4では、(x、y)走査駆動機構の1つまたは両方が共振器94に置き換えられる。共振器94は、試料台をその共振周波数または共振周波数の近傍で振動させるように設定された振動ドライブである。このような共振走査型顕微鏡は、非常に高速かつ安定した走査能力を提供し、その能力は、一定の相互作用モードで動作する場合の閾値制限を優に上回る可能性がある。あるいは、共振器94は、プローブアセンブリを共振周波数または共振周波数の近傍で振動させるように設定されてもよい。
【0093】
図5を参照すると、検出システム74の光学構成要素をさらに詳細に示す。前出の図と同様に、共通の構成要素には同様の参照符号を付す。レーザ光源100からの光は、第2のビームスプリッタ102により、入射ビーム76と参照ビーム104に分割される。入射ビーム76は、対物レンズ78によりカンチレバーの後部18b上で焦点を結ぶ。カンチレバーで反射された後、ビーム80は、第1のビームスプリッタ82で分割される。先に述べたように、第1の成分84は、たわみ検出器90、28、92に誘導され、第2の成分86は干渉計88に誘導される。
【0094】
干渉計の内部で、カンチレバー18bから反射されたビーム86は、ビームスプリッタ106で分割される。参照ビーム104は、適切に配置された再帰反射器108に誘導され、その後ビームスプリッタ106に誘導される。再帰反射器108は、試料の垂直(z)方向位置に対して固定光路長を提供するように位置合わせされる。ビームスプリッタ106は、エネルギー吸収性の被覆がなされ、入射ビーム86と参照ビーム104の両方を分割して、ほぼ90°に等しい相対的な位相ずれを有する第1および第2のインターフェログラムを生成する。この2つのインターフェログラムは、それぞれ第1の光検出器112および第2の光検出器114で検出される。
【0095】
理想的には、光検出器信号は、90°の位相差を有する相補的な正弦信号および余弦信号である。さらに、それらの信号は、DCオフセットがなく、等しい振幅を有し、カンチレバーの位置xおよびレーザの波長λのみに依存すべきである。2つの光検出器信号が、等しい振幅で直角位相である完全な高調波でない結果生じる誤差を求め、その誤差に補正を適用するために、知られた方法を使用して光路差を変化させながら光検出器112、114の出力を監視する。同様に、DCオフセットのレベルも当技術分野で知られる方法により補正される。
【0096】
この光検出器信号は、専用ハードウェアまたはプログラムされたコンピュータとして提供されることが可能な、従来の干渉計可逆干渉縞計数装置および干渉縞再分割装置と共に使用するのに適する。直交位相の干渉縞計数装置を使用すると、カンチレバーの位置の変位をλ/8の精度、すなわち波長532nmの光の場合66nmの精度で、測定することができる。信号の逆正接に基づく知られた干渉縞再分割技術は、精度をナノメートル規模またはそれ以下まで向上することを可能にする。
【0097】
2つのコヒーレントビーム間の経路差分を抽出する、干渉測定による方法は当分野でよく知られており、そのためこれ以上は詳細に説明しない。
上記の実施形態では、参照ビームは、試料のz方向位置に対して固定された光路長を有するように構成される。したがって、上記のように、参照ビームは、試料が載せられた台の表面、または台の位置にその位置が関連付けられた再帰反射器から反射されることができる。あるいは、反射器と試料のz位置の関係は固定されなくともよい。そのような実施形態では、参照ビームは、固定点から反射されることができ、固定点は、試料のz位置と既知の(だが変動する)関係を有する。したがって、先端の高さは、干渉測定で測定された光路差および固定点に対する試料のz方向位置から推定される。
【0098】
本明細書に記載される干渉計は、ホモダインシステムの一例である。ここに記載される特定のシステムは、本願にいくつかの利点を与える。2つの直交位相インターフェログラムを使用することにより、複数の干渉縞、したがってより広い変位範囲にわたるカンチレバーの変位の測定が可能になる。ビームスプリッタ106に移相性の被覆を使用することにより、干渉計が、例えば光ビームがカンチレバーから反射される際の偏光の変化から生じる偏光効果の影響を受けなくなる。これらの原理に基づく干渉計の例が米国特許第6,678,056号に記載される。光路長の変化を測定可能な代替の干渉計システムも本発明と共に使用されてよい。適切なホモダイン偏光干渉計が上記で参照した欧州特許第1892727号に記載され、適切なヘテロダイン干渉計が上記で参照した米国特許第5,144,150号に記載される。
【0099】
上記のAFMは、第2の走査速度領域で動作可能であることが明らかである。検出システムによって抽出された高さ情報は、プローブの真の高さ、したがって試料表面の形状の真の高さを表す。これは、先端に対するプローブ基部の位置、すなわちたわみに依存しない。したがって、走査中に平均値を中心としたたわみの変動が許されるが、それは、干渉測定による高さの測定に関係しない。
【0100】
しかし、第3の走査速度領域に移る時に、本発明のAFMを運用に向けて準備する際に追加的なステップが含まれなければならない。カンチレバーで過渡運動が引き起こされた場合、その運動は、カンチレバーの後部18bの揺動として現れることは、図2を参照してすでに示した。そのような効果が高さの画像中でアーチファクトとして見えるのを回避するには、検出システムの調査用レーザビーム76がその揺動の節に焦点を結ぶことが重要である。すなわち、先端の点20a上方の位置である。これは、出力画像を監視し、画像に重なる周期的な変動が最小になるか、さらには消失するまで入射ビーム76の検出位置を調整することにより、経験的に実現されることができる。すなわち、装置70を使用して第3の領域内の走査速度でデータを抽出する前または最中に、プローブおよび干渉計が正しい配列に設定されなければならない。
【0101】
調査用ビームがレーザビームの後部で入射する位置が重要である第2の理由を、図6を参照して説明する。図6は、カンチレバーの後部18bにおける3つの可能なレーザビームの入射位置を示す。状況(a)では、プローブ16はある向きにあり、状況(b)では、試料表面の段差を追従して第2の向きにある。レーザビームが、プローブ先端20より右の位置Aに合わせられた場合は、状況(b)ではたわみがより浅い角度なので、測定される高さの変化A2−A1が段差の高さより大きいことが明白である。逆に、ビームが位置Cに合わせられた場合には、測定される変化C2−C1は、真の段差の高さより小さくなる。段差の高さの真の測定結果は、レーザビームが正確に位置B、すなわち先端20と試料14との最も近い接触点の上方に合わせられた場合にのみ得られる。つまり、干渉計を正確にプローブ形状に合わせることが重要である。
【0102】
真の高さの問題と過渡運動の影響の問題は、基本的には入射ビームを先端の点のすぐ上に位置合わせすることによって克服されるので、ともに同じ方法で対処することができる。真の高さの問題は、第2および第3両方の走査速度領域に該当することに留意されたい。これは、この問題は、干渉測定で高さ情報が抽出される際にカンチレバーの傾斜/たわみが変動するのを許す結果生じるためである。したがって、最も正確な画像情報を得るために、カンチレバーの傾斜/たわみの変動が許される走査速度領域については、高さ検出システムをプローブの形状と合わせるステップが行われなければならない。
【0103】
上記で述べたように、位置合わせは、過渡運動が引き起こされる走査の前または最中に、高い走査速度で経験的に実現されることができる。あるいは、図7に示す位置合わせシステムが使用されることができる。このシステムでは、梁部励振装置120が、カンチレバーの梁部18の振動を引き起こすように設定される。それに応じてカンチレバーの後部18bが振動または揺動し、その影響は、たわみ検出および高さ検出システムにおける周期的な信号の変動として後部の表面18bから反射する光に観察されることができる。図の実施形態では、制御システム122が、高さ検出システム88の出力を監視するように設定される。カンチレバーの振動に伴ってこの出力信号の周期的な変動が観察される場合、制御システム122は、1つまたは複数の駆動体124に信号を送り、駆動体124は、検出点(カンチレバーの後部18bに光が入射する点)を横方向に移動する。検出点の調整は、高さ検出信号中の揺動の影響が最小になるまで継続する。
【0104】
図7の実施形態では、駆動体124が高さ検出システム88に接続され、したがって、矢印126で示すように、カンチレバーの後部18bに入射する光の位置合わせを、検出点がずらされるように移動するように動作可能である。あるいは、1つまたは複数の駆動体124は、プローブ自体に接続され、制御システム122の指示に従ってプローブを横方向に動かして検出点を上記のようにずらすように構成される。すなわち、検出点は、プローブを動かすか、またはプローブに入射する光の位置合わせを移動することによって調整される。
【0105】
カンチレバー18の振動、およびしたがってその後部18bの揺動は、圧電トランスデューサ等の知られた梁部振動装置120によって生成される。あるいは、カンチレバー18は、電場または磁場に反応するように適合させることもできる。その場合、振動は、カンチレバー18が機械的に反応する、振動電場または磁場を用いて生成されることができる。
【0106】
検出点を設定する代替法は、高さ検出信号を監視しながらカンチレバー基部の高さを変えるものである。その場合、カンチレバーの後部18b上の検出点は、カンチレバー基部の高さの変化をもたらす高さ検出信号中の変動を最小にするように調整されることができる。基部の高さは、各種機構で調整されることが可能であるが、有利な技術の1つは、フィードバック設定点を変えるものである。それにより、新しい設定点値が達成されるまで、カンチレバー基部と試料の間の垂直方向の分離が変化する。この方法には、試料と先端の間に加わる最小および最大の力の制御を可能にするという利点がある。
【0107】
さらなる代替法は、例えば標準的な段差サンプル等の既知の高さの変動を有する試料を走査することにより、既知の垂直方向の距離だけカンチレバーの先端をずらすものである。そして、高さ検出信号が適正な変位または高さの変動を示すまで、カンチレバーの後部18b上の検出点の位置が調整される。
【0108】
一般には、カンチレバーの後部18bの位置は、プローブ自体から幾何学的に配置するよりも、経験的に先端の点20aのすぐ上に配置する方が好ましい。その理由は、現在のプローブ製造方法を使用すると、先端の位置に常に多少の不確定性があるためである。無論、特定のプローブについての先端位置が上記のような経験的技術によって一旦配置されると、その位置を記録して、その後同じプローブを使用する際に経験的な決定を繰り返す必要性を回避することができる。
【0109】
本発明のこの特徴は、プローブ(またはそれと同等に試料および台)を共振で振動させることによってラスタ走査の少なくとも1つの要素が迅速に実行される、WO2004/005844に記載されるような共振走査型顕微鏡に使用するのに特に適する。そのような走査速度は、カンチレバーの過渡運動を引き起こす可能性が非常に高く、過渡運動があると、従来技術の検出システムで収集される画像が不明瞭になる。
【特許請求の範囲】
【請求項1】
走査型プローブ顕微鏡とともに使用する検出システムであって、
基部端および自由端(base and free ends)を有しかつ前記自由端は鋭利な先端(sharp tip)を支持するカンチレバーを備えたプローブを照明するビームを生成する光源と、
前記プローブから反射された光を集光する集光手段(collecting means)とを備え、
前記ビームは、
前記プローブ先端(tip)近傍(vicinity)の前記プローブの上部表面を照明し、前記反射された光は、前記プローブの前記上部表面のたわみ(deflection)の指示(indication)がそこから取得される(obtained)第1の成分(component)と、
基準点に対する前記プローブの前記上部表面の位置(position)に関する情報を第2の成分から抽出するように構成された高さ検出システムに送出される第2の成分、の2つの成分を含む、システム。
【請求項2】
前記高さ検出システムが、反射光の前記第2の成分と高さ参照ビームとの経路差を検出するように構成された干渉計を備える、請求項1に記載の検出システム。
【請求項3】
前記干渉計(interferometer)が、一対(a pair)の直交位相(phase quadrature)インターフェログラム(interferograms)を生成する手段を含む、請求項2に記載の検出システム。
【請求項4】
各インターフェログラムで検出された干渉縞(fringes)の数に応じた出力を生成するように構成された干渉縞計数装置を含む、請求項3に記載の検出システム。
【請求項5】
前記干渉縞計数装置が干渉縞再分割(subdividing)装置を含む、請求項4に記載の検出システム。
【請求項6】
前記一対の直交位相インターフェログラムを生成する手段が、分相性の被覆(phase-splitting coating)を有するビームスプリッタである、請求項3から5のいずれか一項に記載の検出システム。
【請求項7】
前記第1の成分は前記干渉計にも送出され、前記干渉計が、反射光の前記第1の成分と、自由端から離れた前記カンチレバー上の位置によって長さが定義される光路(optical path)に沿って伝播する(propagates along)たわみ参照ビーム(deflection reference beam)との光路差を検出し、それにより前記カンチレバーのたわみについての情報を提供するようにさらに構成される、請求項2から6のいずれか一項に記載の検出システム。
【請求項8】
自由端から離れた前記カンチレバー上の前記位置が、前記カンチレバーの基部端である、請求項7に記載の検出システム。
【請求項9】
前記第1の成分がたわみ検出器に送出され、前記たわみ検出器が、前記プローブの前記上部表面のたわみの指示を提供するように構成される、前記請求項のいずれかに記載の検出システム。
【請求項10】
前記たわみ検出器は第2の干渉計であり、前記第2の干渉計が、反射光の前記第1の成分と、自由端から離れた前記カンチレバー上の位置によって長さが定義される光路に沿って伝播するたわみ参照ビームとの光路差を検出するように構成される、請求項9に記載の検出システム。
【請求項11】
自由端から離れた前記カンチレバー上の前記位置が、前記カンチレバーの基部端である、請求項10に記載の検出システム。
【請求項12】
前記たわみ検出器は分割(split)フォトダイオードであり、前記分割フォトダイオードは、反射光の前記第1の成分が、前記プローブの前記上部表面の向きの角度によって決まる相対的強度で、前記ダイオードの2つの部分に入射するように配向される、請求項9に記載の検出システム。
【請求項13】
前記反射光を前記第1および第2の成分に分割するように構成されたビームスプリッタを含む、前記請求項のいずれかに記載の検出システム。
【請求項14】
前記プローブが、前記カンチレバーの前記自由端の近傍に取り付けられた先端を備え、前記カンチレバーは基部端で支持され、前記ビームで照明される前記プローブの前記上部表面は、前記先端の上方(above the tip)にある、前記請求項のいずれかに記載の検出システム。
【請求項15】
前記プローブが、前記プローブの先端を移動させるように動作可能なアクチュエータを含む、前記請求項のいずれかに記載の検出システム。
【請求項16】
試料とプローブの間の相互作用に従って試料を画像化する走査型プローブ顕微鏡であって、前記プローブと前記試料の表面との間に相対的な運動を提供するように構成された駆動手段と、請求項1から15のいずれか一項に記載のプローブ検出システムとを備える走査型プローブ顕微鏡。
【請求項17】
前記駆動手段は、前記試料表面に実質的に平行な面で前記プローブと前記試料表面との間に相対的な運動を提供するように構成されたXY走査装置と、前記試料表面に直交する方向の相対的な運動を提供するように構成されたZ方向駆動体とを備える、請求項16に記載の走査型プローブ顕微鏡。
【請求項18】
前記プローブ検出システムから取得される前記プローブの前記上部表面のたわみの指示が、前記Z方向駆動体を内蔵したフィードバックシステムに付加され、前記Z方向駆動体は、前記プローブの向きの角度の指示(indication)を設定レベル(a set level)に戻すように構成される、請求項17に記載の走査型プローブ顕微鏡。
【請求項19】
前記Z方向駆動体が、前記プローブの前記基部を移動するように構成された基部駆動体を含む、請求項18に記載の走査型プローブ顕微鏡。
【請求項20】
前記Z方向駆動体が、前記プローブと一体のアクチュエータも含み、前記アクチュエータは、前記プローブの前記先端を移動させるように動作可能であり、前記基部駆動体より高速の応答が可能である、請求項19に記載の走査型プローブ顕微鏡。
【請求項21】
前記フィードバックシステムが、前記XY走査装置が画像画素間で前記プローブを移動するのに要する所要時間より長い所要時間で動作する、請求項18、19、または20に記載の走査型プローブ顕微鏡。
【請求項22】
前記XY走査装置が、前記プローブまたは試料と支持体を、プローブまたは試料と支持体の共振周波数または共振周波数の近傍で振動させるように構成された共振器を備える、請求項18から21のいずれか一項に記載の走査型プローブ顕微鏡。
【請求項23】
試料とプローブの間の相互作用に従って試料を画像化する走査型プローブ顕微鏡であって、前記プローブと前記試料の表面との間に相対的な運動を提供するように構成された駆動手段と、前記試料表面に実質的に直交する方向における、基準点に対する前記プローブの位置の指示を提供するように構成されたプローブ検出システムとを備え、
前記プローブは、基部端および自由端を有するカンチレバーを備え、前記自由端は鋭利な先端を支持し、
前記駆動手段は、前記試料表面に実質的に平行な面で前記プローブと前記試料表面との間に相対的な運動を提供するように構成されたXY走査装置を備え、前記走査装置は、前記プローブまたは試料と支持体を、プローブまたは試料と支持体の共振周波数または共振周波数の近傍で振動させるように構成された少なくとも1つの共振器と、前記試料表面に実質的に直交する方向の相対的な運動を提供するように構成されたZ方向駆動体とを備え、
前記プローブ検出システムは、前記プローブを照明するビームを生成する光源と、前記プローブから反射された光を集光する集光手段であって、前記ビームは前記プローブ先端近傍の前記プローブの上部表面を照明する、集光手段と、前記プローブから反射された光から、基準点に対する前記プローブの前記上部表面の位置に関する情報を抽出するように構成された高さ検出システムとを備える、走査型プローブ顕微鏡。
【請求項24】
前記高さ検出システムが、プローブから反射された光と高さ参照ビームとの経路差を検出するように構成された干渉計を備える、請求項23に記載の顕微鏡。
【請求項25】
走査プローブの上部表面から反射された光を検出する方法であって、前記上部表面のプローブ先端の真上の点に光ビームを誘導し、前記上部表面から反射された光を集光し、その光を、基準レベル上方の前記プローブ先端の高さを示す画像を形成するように構成された高さ検出器に誘導するステップを含む方法。
【請求項26】
前記方法の前に、前記上部表面上の前記プローブ先端の真上(directly above)の前記点を特定するステップが含まれる、請求項25に記載の方法。
【請求項27】
前記上部表面の前記点を特定する前記ステップは、
(a)前記上部表面上に光を誘導するステップ、
(b)前記プローブをプローブの先端を中心として振動させて前記上部表面の角度を変えるステップ、
(c)前記高さ検出器の出力を監視するステップ、
(d)前記光が入射する前記上部表面上の前記点の位置を変えるステップ、および
(e)前記プローブを傾斜させた結果前記高さ検出器の前記出力中に見られる変動が最小になるまで、ステップ(c)および(d)を繰り返すステップ
を含む、請求項26に記載の方法。
【請求項28】
前記プローブが、基部端で保持されかつ自由端または自由端近傍で前記先端を支持するカンチレバーを備え、前記ビームによって照明される前記プローブの前記上部表面は、前記カンチレバーの自由端または自由端近傍にある、請求項26に記載の方法。
【請求項29】
前記上部表面上の前記点を特定するステップは、
(a)前記カンチレバーの前記上部表面上に光を誘導するステップ、
(b)前記先端を固定位置に維持しながら前記カンチレバーの前記基部を垂直方向に移動して、前記カンチレバーの向きの角度を変えるステップ、
(c)前記高さ検出器の出力を監視するステップ、
(d)前記光が入射する前記上部表面上の前記点の位置を変えるステップ、および
(e)前記プローブの基部を移動した結果前記高さ検出器の前記出力中に見られる変動が最小になるまで、ステップ(c)および(d)を繰り返すステップ
を含む、請求項28に記載の方法。
【請求項30】
プローブの向きの指示からフィードバック信号が得られ、前記フィードバック信号は、前記プローブが事前に設定された向きに戻されるように基部の高さの調整を行わせるようになっており、前記カンチレバーの前記基部を垂直方向に移動するステップは、前記事前に設定された向きを変化させることによって達成される、請求項29に記載の方法。
【請求項31】
前記上部表面上の前記点を特定するステップが、
(a)前記上部表面上に光を誘導するステップ、
(b)既知の距離だけ前記プローブ先端を変位させるステップ、
(c)前記高さ検出器の出力を監視するステップ、
(d)前記光が入射する前記上部表面上の前記点の位置を変えるステップ、および
(e)前記高さ検出器の出力が、前記既知の変位について予想される出力と一致するまで、ステップ(c)および(d)を繰り返すステップ
を含む、請求項26に記載の方法。
【請求項32】
ステップ(b)が、既知の高さの変動を有する試料上で前記プローブを走査するステップを含む、請求項31に記載の方法。
【請求項33】
前記上部表面上の前記点を特定するステップが、
(a)前記上部表面上に光を誘導するステップ、
(b)前記プローブの過渡運動(transient motion)を引き起こすのに十分な速度で前記プローブを走査するステップ、
(c)前記高さ検出器の出力を監視するステップ、
(d)前記光が入射する前記上部表面上の前記点の位置を変えるステップ、および
(e)過渡運動の結果前記高さ検出器の出力中に見られる変動が最小になるまで、ステップ(c)および(d)を繰り返すステップを含む、請求項26に記載の方法。
【請求項34】
前記プローブは、請求項1から15に記載の検出システムを内蔵した走査型プローブ顕微鏡の一部である、請求項25から33のいずれか一項に記載の光を検出する方法。
【請求項35】
走査型プローブ顕微鏡を使用してデータを収集する方法であって、
(a)基部端および自由端を有し、前記自由端が鋭利な先端を支持するカンチレバーを備えるプローブを、試料表面の近傍に移動するステップ、
(b)前記プローブの上部表面上の前記先端の真上の点に光ビームを誘導するステップ、
(c)前記プローブの前記上部表面から反射された光を集光および分析しながら、前記試料表面上で前記プローブを走査するステップを含み、前記集光された光の第1の成分の分析によって得られるフィードバック信号に応答して前記プローブの基部を垂直方向に駆動するようにZ方向駆動体が動作し、前記集光された光の第1の成分から、前記プローブの前記上部表面のたわみの指示が得られ、集光された光の第2の成分は、第2の成分と高さ参照ビームとの間の経路差を検出するように構成され、基準レベル上方の前記プローブ先端の高さを示す画像を形成するように構成された干渉計に送出され、前記フィードバック信号への応答は、複数の画像画素が収集される所要時間よりも長い所要時間(timescale)にわたる、方法。
【請求項1】
走査型プローブ顕微鏡とともに使用する検出システムであって、
基部端および自由端(base and free ends)を有しかつ前記自由端は鋭利な先端(sharp tip)を支持するカンチレバーを備えたプローブを照明するビームを生成する光源と、
前記プローブから反射された光を集光する集光手段(collecting means)とを備え、
前記ビームは、
前記プローブ先端(tip)近傍(vicinity)の前記プローブの上部表面を照明し、前記反射された光は、前記プローブの前記上部表面のたわみ(deflection)の指示(indication)がそこから取得される(obtained)第1の成分(component)と、
基準点に対する前記プローブの前記上部表面の位置(position)に関する情報を第2の成分から抽出するように構成された高さ検出システムに送出される第2の成分、の2つの成分を含む、システム。
【請求項2】
前記高さ検出システムが、反射光の前記第2の成分と高さ参照ビームとの経路差を検出するように構成された干渉計を備える、請求項1に記載の検出システム。
【請求項3】
前記干渉計(interferometer)が、一対(a pair)の直交位相(phase quadrature)インターフェログラム(interferograms)を生成する手段を含む、請求項2に記載の検出システム。
【請求項4】
各インターフェログラムで検出された干渉縞(fringes)の数に応じた出力を生成するように構成された干渉縞計数装置を含む、請求項3に記載の検出システム。
【請求項5】
前記干渉縞計数装置が干渉縞再分割(subdividing)装置を含む、請求項4に記載の検出システム。
【請求項6】
前記一対の直交位相インターフェログラムを生成する手段が、分相性の被覆(phase-splitting coating)を有するビームスプリッタである、請求項3から5のいずれか一項に記載の検出システム。
【請求項7】
前記第1の成分は前記干渉計にも送出され、前記干渉計が、反射光の前記第1の成分と、自由端から離れた前記カンチレバー上の位置によって長さが定義される光路(optical path)に沿って伝播する(propagates along)たわみ参照ビーム(deflection reference beam)との光路差を検出し、それにより前記カンチレバーのたわみについての情報を提供するようにさらに構成される、請求項2から6のいずれか一項に記載の検出システム。
【請求項8】
自由端から離れた前記カンチレバー上の前記位置が、前記カンチレバーの基部端である、請求項7に記載の検出システム。
【請求項9】
前記第1の成分がたわみ検出器に送出され、前記たわみ検出器が、前記プローブの前記上部表面のたわみの指示を提供するように構成される、前記請求項のいずれかに記載の検出システム。
【請求項10】
前記たわみ検出器は第2の干渉計であり、前記第2の干渉計が、反射光の前記第1の成分と、自由端から離れた前記カンチレバー上の位置によって長さが定義される光路に沿って伝播するたわみ参照ビームとの光路差を検出するように構成される、請求項9に記載の検出システム。
【請求項11】
自由端から離れた前記カンチレバー上の前記位置が、前記カンチレバーの基部端である、請求項10に記載の検出システム。
【請求項12】
前記たわみ検出器は分割(split)フォトダイオードであり、前記分割フォトダイオードは、反射光の前記第1の成分が、前記プローブの前記上部表面の向きの角度によって決まる相対的強度で、前記ダイオードの2つの部分に入射するように配向される、請求項9に記載の検出システム。
【請求項13】
前記反射光を前記第1および第2の成分に分割するように構成されたビームスプリッタを含む、前記請求項のいずれかに記載の検出システム。
【請求項14】
前記プローブが、前記カンチレバーの前記自由端の近傍に取り付けられた先端を備え、前記カンチレバーは基部端で支持され、前記ビームで照明される前記プローブの前記上部表面は、前記先端の上方(above the tip)にある、前記請求項のいずれかに記載の検出システム。
【請求項15】
前記プローブが、前記プローブの先端を移動させるように動作可能なアクチュエータを含む、前記請求項のいずれかに記載の検出システム。
【請求項16】
試料とプローブの間の相互作用に従って試料を画像化する走査型プローブ顕微鏡であって、前記プローブと前記試料の表面との間に相対的な運動を提供するように構成された駆動手段と、請求項1から15のいずれか一項に記載のプローブ検出システムとを備える走査型プローブ顕微鏡。
【請求項17】
前記駆動手段は、前記試料表面に実質的に平行な面で前記プローブと前記試料表面との間に相対的な運動を提供するように構成されたXY走査装置と、前記試料表面に直交する方向の相対的な運動を提供するように構成されたZ方向駆動体とを備える、請求項16に記載の走査型プローブ顕微鏡。
【請求項18】
前記プローブ検出システムから取得される前記プローブの前記上部表面のたわみの指示が、前記Z方向駆動体を内蔵したフィードバックシステムに付加され、前記Z方向駆動体は、前記プローブの向きの角度の指示(indication)を設定レベル(a set level)に戻すように構成される、請求項17に記載の走査型プローブ顕微鏡。
【請求項19】
前記Z方向駆動体が、前記プローブの前記基部を移動するように構成された基部駆動体を含む、請求項18に記載の走査型プローブ顕微鏡。
【請求項20】
前記Z方向駆動体が、前記プローブと一体のアクチュエータも含み、前記アクチュエータは、前記プローブの前記先端を移動させるように動作可能であり、前記基部駆動体より高速の応答が可能である、請求項19に記載の走査型プローブ顕微鏡。
【請求項21】
前記フィードバックシステムが、前記XY走査装置が画像画素間で前記プローブを移動するのに要する所要時間より長い所要時間で動作する、請求項18、19、または20に記載の走査型プローブ顕微鏡。
【請求項22】
前記XY走査装置が、前記プローブまたは試料と支持体を、プローブまたは試料と支持体の共振周波数または共振周波数の近傍で振動させるように構成された共振器を備える、請求項18から21のいずれか一項に記載の走査型プローブ顕微鏡。
【請求項23】
試料とプローブの間の相互作用に従って試料を画像化する走査型プローブ顕微鏡であって、前記プローブと前記試料の表面との間に相対的な運動を提供するように構成された駆動手段と、前記試料表面に実質的に直交する方向における、基準点に対する前記プローブの位置の指示を提供するように構成されたプローブ検出システムとを備え、
前記プローブは、基部端および自由端を有するカンチレバーを備え、前記自由端は鋭利な先端を支持し、
前記駆動手段は、前記試料表面に実質的に平行な面で前記プローブと前記試料表面との間に相対的な運動を提供するように構成されたXY走査装置を備え、前記走査装置は、前記プローブまたは試料と支持体を、プローブまたは試料と支持体の共振周波数または共振周波数の近傍で振動させるように構成された少なくとも1つの共振器と、前記試料表面に実質的に直交する方向の相対的な運動を提供するように構成されたZ方向駆動体とを備え、
前記プローブ検出システムは、前記プローブを照明するビームを生成する光源と、前記プローブから反射された光を集光する集光手段であって、前記ビームは前記プローブ先端近傍の前記プローブの上部表面を照明する、集光手段と、前記プローブから反射された光から、基準点に対する前記プローブの前記上部表面の位置に関する情報を抽出するように構成された高さ検出システムとを備える、走査型プローブ顕微鏡。
【請求項24】
前記高さ検出システムが、プローブから反射された光と高さ参照ビームとの経路差を検出するように構成された干渉計を備える、請求項23に記載の顕微鏡。
【請求項25】
走査プローブの上部表面から反射された光を検出する方法であって、前記上部表面のプローブ先端の真上の点に光ビームを誘導し、前記上部表面から反射された光を集光し、その光を、基準レベル上方の前記プローブ先端の高さを示す画像を形成するように構成された高さ検出器に誘導するステップを含む方法。
【請求項26】
前記方法の前に、前記上部表面上の前記プローブ先端の真上(directly above)の前記点を特定するステップが含まれる、請求項25に記載の方法。
【請求項27】
前記上部表面の前記点を特定する前記ステップは、
(a)前記上部表面上に光を誘導するステップ、
(b)前記プローブをプローブの先端を中心として振動させて前記上部表面の角度を変えるステップ、
(c)前記高さ検出器の出力を監視するステップ、
(d)前記光が入射する前記上部表面上の前記点の位置を変えるステップ、および
(e)前記プローブを傾斜させた結果前記高さ検出器の前記出力中に見られる変動が最小になるまで、ステップ(c)および(d)を繰り返すステップ
を含む、請求項26に記載の方法。
【請求項28】
前記プローブが、基部端で保持されかつ自由端または自由端近傍で前記先端を支持するカンチレバーを備え、前記ビームによって照明される前記プローブの前記上部表面は、前記カンチレバーの自由端または自由端近傍にある、請求項26に記載の方法。
【請求項29】
前記上部表面上の前記点を特定するステップは、
(a)前記カンチレバーの前記上部表面上に光を誘導するステップ、
(b)前記先端を固定位置に維持しながら前記カンチレバーの前記基部を垂直方向に移動して、前記カンチレバーの向きの角度を変えるステップ、
(c)前記高さ検出器の出力を監視するステップ、
(d)前記光が入射する前記上部表面上の前記点の位置を変えるステップ、および
(e)前記プローブの基部を移動した結果前記高さ検出器の前記出力中に見られる変動が最小になるまで、ステップ(c)および(d)を繰り返すステップ
を含む、請求項28に記載の方法。
【請求項30】
プローブの向きの指示からフィードバック信号が得られ、前記フィードバック信号は、前記プローブが事前に設定された向きに戻されるように基部の高さの調整を行わせるようになっており、前記カンチレバーの前記基部を垂直方向に移動するステップは、前記事前に設定された向きを変化させることによって達成される、請求項29に記載の方法。
【請求項31】
前記上部表面上の前記点を特定するステップが、
(a)前記上部表面上に光を誘導するステップ、
(b)既知の距離だけ前記プローブ先端を変位させるステップ、
(c)前記高さ検出器の出力を監視するステップ、
(d)前記光が入射する前記上部表面上の前記点の位置を変えるステップ、および
(e)前記高さ検出器の出力が、前記既知の変位について予想される出力と一致するまで、ステップ(c)および(d)を繰り返すステップ
を含む、請求項26に記載の方法。
【請求項32】
ステップ(b)が、既知の高さの変動を有する試料上で前記プローブを走査するステップを含む、請求項31に記載の方法。
【請求項33】
前記上部表面上の前記点を特定するステップが、
(a)前記上部表面上に光を誘導するステップ、
(b)前記プローブの過渡運動(transient motion)を引き起こすのに十分な速度で前記プローブを走査するステップ、
(c)前記高さ検出器の出力を監視するステップ、
(d)前記光が入射する前記上部表面上の前記点の位置を変えるステップ、および
(e)過渡運動の結果前記高さ検出器の出力中に見られる変動が最小になるまで、ステップ(c)および(d)を繰り返すステップを含む、請求項26に記載の方法。
【請求項34】
前記プローブは、請求項1から15に記載の検出システムを内蔵した走査型プローブ顕微鏡の一部である、請求項25から33のいずれか一項に記載の光を検出する方法。
【請求項35】
走査型プローブ顕微鏡を使用してデータを収集する方法であって、
(a)基部端および自由端を有し、前記自由端が鋭利な先端を支持するカンチレバーを備えるプローブを、試料表面の近傍に移動するステップ、
(b)前記プローブの上部表面上の前記先端の真上の点に光ビームを誘導するステップ、
(c)前記プローブの前記上部表面から反射された光を集光および分析しながら、前記試料表面上で前記プローブを走査するステップを含み、前記集光された光の第1の成分の分析によって得られるフィードバック信号に応答して前記プローブの基部を垂直方向に駆動するようにZ方向駆動体が動作し、前記集光された光の第1の成分から、前記プローブの前記上部表面のたわみの指示が得られ、集光された光の第2の成分は、第2の成分と高さ参照ビームとの間の経路差を検出するように構成され、基準レベル上方の前記プローブ先端の高さを示す画像を形成するように構成された干渉計に送出され、前記フィードバック信号への応答は、複数の画像画素が収集される所要時間よりも長い所要時間(timescale)にわたる、方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2011−522273(P2011−522273A)
【公表日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願番号】特願2011−512227(P2011−512227)
【出願日】平成21年6月8日(2009.6.8)
【国際出願番号】PCT/GB2009/050637
【国際公開番号】WO2009/147450
【国際公開日】平成21年12月10日(2009.12.10)
【出願人】(510320391)インフィニテシマ・リミテッド (2)
【公表日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願日】平成21年6月8日(2009.6.8)
【国際出願番号】PCT/GB2009/050637
【国際公開番号】WO2009/147450
【国際公開日】平成21年12月10日(2009.12.10)
【出願人】(510320391)インフィニテシマ・リミテッド (2)
[ Back to top ]