
ベルトコンベヤ装置および搬送装置
【課題】 駆動のための張力を少なくしコンベヤユニットの小型化によりコストを下げ、安定した走行を実現する。
【解決手段】 従動プーリ間に張設された無端スチールベルト10と、搬送方向と直交する無端スチールベルト10の両側縁部10c、10dに配置され、摩擦駆動によって無端スチールベルト10を駆動する一対のベルト駆動装置20A、20Bとを備え、無端スチールベルト10は、上段ベット面10aと下段ベット面10bとに搬送路Cを備え、ベルト駆動装置20A、20Bの上流側に蛇行検出部40A、40Bを対向配置するとともに、蛇行検出部40A、40Bによる信号に基づいてベルト駆動装置20A、20Bの相互の速度を調整する制御部とを設けた。一対のベルト駆動装置20A、20Bは、無端スチールベルト10の上段ベット面10aおよび/または下段ベット面10bに配置されている。
【解決手段】 従動プーリ間に張設された無端スチールベルト10と、搬送方向と直交する無端スチールベルト10の両側縁部10c、10dに配置され、摩擦駆動によって無端スチールベルト10を駆動する一対のベルト駆動装置20A、20Bとを備え、無端スチールベルト10は、上段ベット面10aと下段ベット面10bとに搬送路Cを備え、ベルト駆動装置20A、20Bの上流側に蛇行検出部40A、40Bを対向配置するとともに、蛇行検出部40A、40Bによる信号に基づいてベルト駆動装置20A、20Bの相互の速度を調整する制御部とを設けた。一対のベルト駆動装置20A、20Bは、無端スチールベルト10の上段ベット面10aおよび/または下段ベット面10bに配置されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、スチールベルトを用いたベルトコンベヤ装置および搬送装置に関する。
【背景技術】
【0002】
従来、郵便局や宅配便業者などの仕分けセンタなどで長距離の仕分けラインで用いられるベルトコンベヤの中には、その長距離(例えば、50mなど)故のベルトの伸びを抑えるため、あるいは搬送方向に直交する払出の場合にそのワークの滑りやすさの点から、スチールベルト(例えば、1mm厚)を用いたベルトコンベヤ装置が使われている(例えば、特許文献1、2参照)。
【0003】
スチールベルトコンベヤの駆動は、従来エンドプーリを駆動するエンドプーリドライブ方式が採用されている(例えば、特許文献3参照)。
【特許文献1】特開2006−248642号公報
【特許文献2】特開2000−211729号公報
【特許文献3】実開平6−25215号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来のスチールベルトコンベヤでは、ドライブプーリとスチールベルトとの間のすべりを抑えるため極度のベルトテンションが必要となる。
また、このエンドプーリは蛇行防止のため、クラウン加工(プーリ縦断面でベルト接触面の中央がふくれている)を施され、そのクラウンによる蛇行防止効果を出すため、なまじ伸びのないスチールベルトでは、ベルトの張力を非常に大きくする必要がある。エンドプーリの頭部(駆動側)のクラウン効果およびスリップを防止して駆動を伝えるため、大掛かりなテンション付与機構が必要であり、尾部プーリについても、頭部のテンションの反力を受け持てるだけのテンション付与機構がやはり必要である。
【0005】
そのため、駆動プーリ、従動プーリとも、スチールベルトの厚み(例えば、1mm厚)の約1000倍の径が必要となり、往き側ベルトと帰り側ベルトとの間隔はプーリ径と同寸となって例えば1000mmの間隔となる。この寸法においてテークアップ機構をも備えるプーリ支持部分となるので、コンベヤフレームが大掛かりとなる。プーリシャフト径も、フレーム材の寸法も、ベアリングもそのテンションのため大型化せざるを得ない。そして、スチールベルトに強大な張力を付与するので、ベルトに傷があり万一破断した場合には、張力が急激に開放されることで、ベルト破片が周囲に非常に速い速度で飛び散り非常に危険である。また、ベルトの蛇行対策として、リタン側でローラ軸を傾けて蛇行修正する場合もある。しかし、この場合、さらにリターン側に帰りベルトを蛇行修正ローラに掛け回す機構が必要となり、さらに大掛かりになる。また、帰りベルトを掛け回したことで、帰り側のワーク搬送は不可能となる。
【0006】
本発明は斯かる従来の問題点を解決するために為されたもので、その目的は、駆動のための張力を少なくしコンベヤユニットの小型化によりコストを下げ、安定した走行を実現したベルトコンベヤ装置および搬送装置を提供することにある。
本発明の別の目的は、蛇行を確実に防止することができるベルトコンベヤ装置および搬送装置を提供することにある。
【課題を解決するための手段】
【0007】
請求項1に係る発明は、従動プーリ間に張設された無端スチールベルトと、搬送方向と直交する前記無端スチールベルトの両側縁部に配置され、摩擦駆動によって前記無端スチールベルトを駆動する少なくとも一対のベルト駆動装置とを備えたことを特徴とする。
請求項2に係る発明は、請求項1記載のベルトコンベヤ装置において、前記無端スチールベルトは、上段ベット面と下段ベット面とに搬送路を備えていることを特徴とする。
【0008】
請求項3に係る発明は、請求項1または請求項2記載のベルトコンベヤ装置において、前記一対のベルト駆動装置の上流側に蛇行検出部を搬送方向に直交する方向にベルト幅を隔てて対向配置するとともに、前記蛇行検出部による信号に基づいて前記一対のベルト駆動装置の相互の速度を調整する制御部をさらに設けたことを特徴とする。
請求項4に係る発明は、請求項1ないし請求項3の何れか記載のベルトコンベヤ装置において、前記一対のベルト駆動装置は、前記無端スチールベルトの上段ベット面および/または下段ベット面に配置されていることを特徴とする。
【0009】
請求項5に係る発明は、請求項1ないし請求項4の何れか記載のベルトコンベヤ装置において、前記一対のベルト駆動装置は、プーリ間に張設された無端ベルトと、前記無端ベルトを回転駆動するモータと、前記無端ベルトの上側のベルトの下面側に配され、前記無端ベルトの上側のベルト方向に付勢される複数のフリクションローラと、前記複数のフリクションローラを前記無端ベルトの上側のベルト方向に押圧する押圧装置と、前記複数のフリクションローラと対向して配置され、前記押圧装置によって押圧される前記複数のフリクションローラを前記上側のベルトを介して受け止める複数のローラを配置した受けローラとを備えていることを特徴とする。
【0010】
請求項6に係る発明は、請求項1ないし請求項5の何れか記載のベルトコンベヤ装置を用いた搬送装置であって、前記ベルトコンベヤ装置の上段ベット面の搬送路と、前記ベルトコンベヤ装置の下段ベット面の搬送路とのそれぞれに、搬送物投入手段と、前記ベルトコンベヤ装置の外に搬送物を払い出す仕分け手段とを備えたことを特徴とする。
請求項7に係る発明は、請求項6記載の搬送装置において、前記搬送物投入手段は、上下の折り返しプーリによって折り返されたベルトを持つベルトジャンクションコンベヤであることを特徴とする。
【0011】
請求項8に係る発明は、請求項6または請求項7記載の搬送装置において、前記仕分け手段は、ダイバータであることを特徴とする。
【発明の効果】
【0012】
頭尾部プーリに駆動力を付与しなくて良いので、ユニットの小型化が図れる。ワーク重量や機長にかかわらず、頭尾部プーリのシャフトに掛かる力は同等となるので、エンドユニットとして共通化できる。
駆動部を無端スチールベルトの両サイドに振り分けられるので、駆動部を往き側にも帰り側にも設置でき、かつワークを往き側にも帰り側にも搬送可能である。
【0013】
ワーク重量や機長が変更となっても、駆動部の設置数を増加して対応できるので、ドライブユニットを共通化できる。
無端スチールベルトの両サイドに設置したベルト駆動装置のフリクションドライブ速度を調整することで、蛇行を確実に防止することができる。
頭尾部プーリに駆動力を付与しなくて良いので、スチールベルトに掛かる張力が弱くなり、スチールベルトの長寿命化が達成できる。また、万一のベルト破断時の安全性が向上する。
【発明を実施するための最良の形態】
【0014】
以下、本発明を図面に示す実施形態に基づいて説明する。
図1〜図15は、本発明の一実施形態に係るベルトコンベヤ装置1を示す。
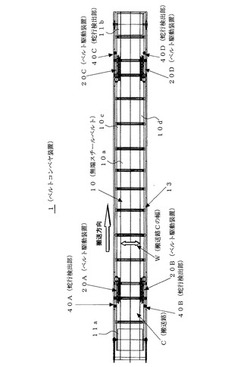
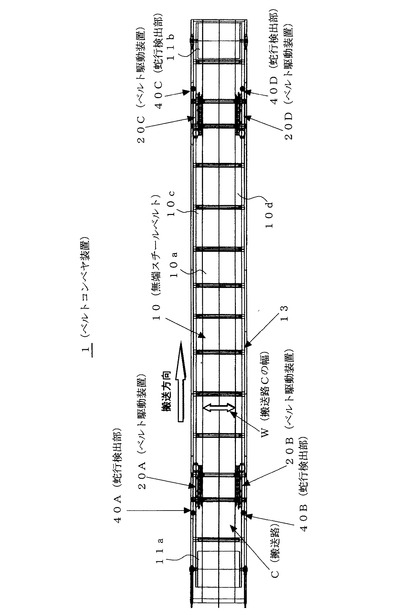
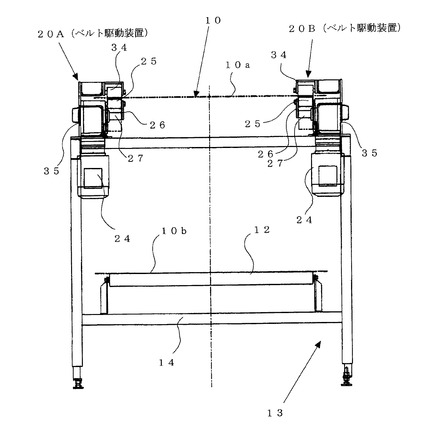
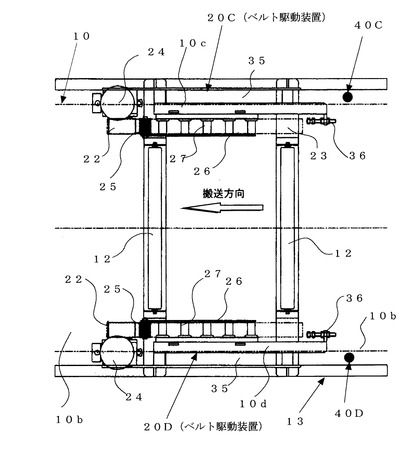
本実施形態に係るベルトコンベヤ装置1は、図1、図2に示すように、頭部プーリ11aと尾部プーリ11bとの間に無端スチールベルト10を張設し、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dによる摩擦駆動によって無端スチールベルト10を駆動するように構成されている。そして、本実施形態に係るベルトコンベヤ装置1には、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dによって駆動する無端スチールベルト10の蛇行を検知するための蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dが設置されている。
【0015】
無端スチールベルト10は、公知であり、例えば、その厚みが0.1〜1.5mm程度のものが市販されている。無端スチールベルト10の幅、長さは、用途に応じて適宜定められるが、幅は3000mmのものが市販されており、例えば、800mm〜2000mm程度、長さは目的、用途に応じて数m〜数百m程度になる。ただし、無端スチールベルト10の長さは、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dを複数箇所に設けることによって延長することは可能である。無端スチールベルト10は、上段ベット面10aと下段ベット面10bとで搬送可能になっている。
【0016】
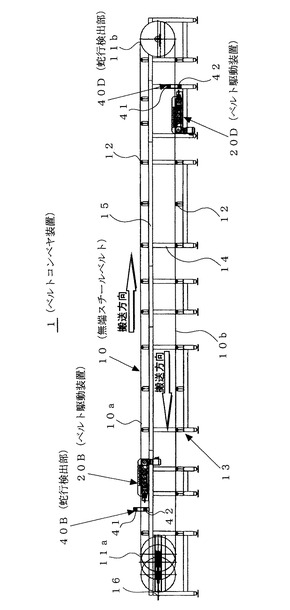
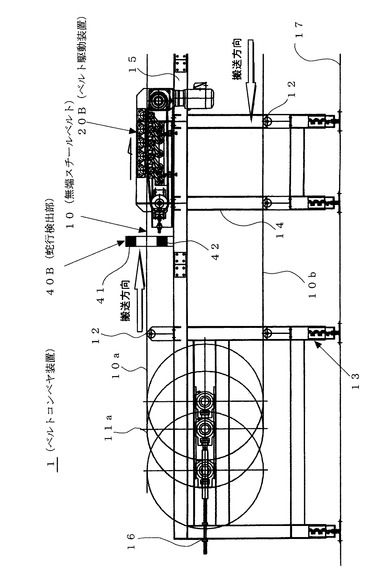
頭部プーリ11aおよび尾部プーリ11bは、図1〜図3に示すように、多数の門型のフレーム14と横枠フレーム15とで構成する機枠13に組み付けられている。頭部プーリ11aおよび尾部プーリ11bは、従来のベルトコンベヤ装置と異なり、駆動手段を備えていない。つまり、頭部プーリ11aおよび尾部プーリ11bは、何れも従動プーリで構成されている。そして、頭部プーリ11aには、無端スチールベルト10に必要とされる張力を付与するための公知のテークアップ16が設けてある。各フレーム14には、ローラ12が取り付けられ、無端スチールベルト10の上段ベット面10aと下段ベット面10bとを支持している。機枠13は、床17上に設置されている。
【0017】
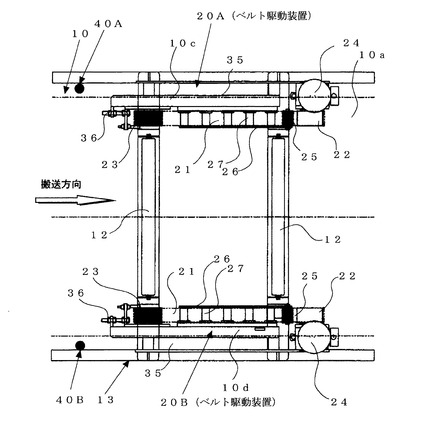
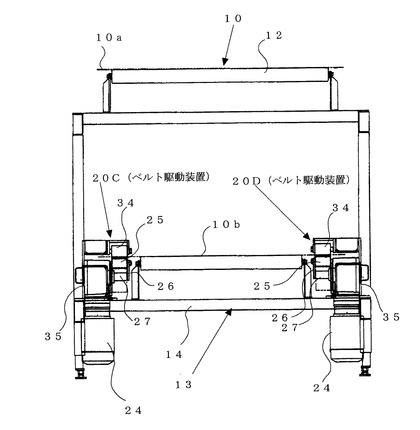
ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dは、図1〜図15に示すように、無端スチールベルト10の上段ベット面10aの頭部プーリ11a側と下段ベット面10bの尾部プーリ11b側とにおいて、無端スチールベルト10の搬送方向と直交する方向に位置する無端スチールベルト10の両側縁部10c、10dを挟み付けるように対向配置されている。無端スチールベルト10の両側縁部10c、10dは、搬送路Cの幅Wを確保するように設定されている。
【0018】
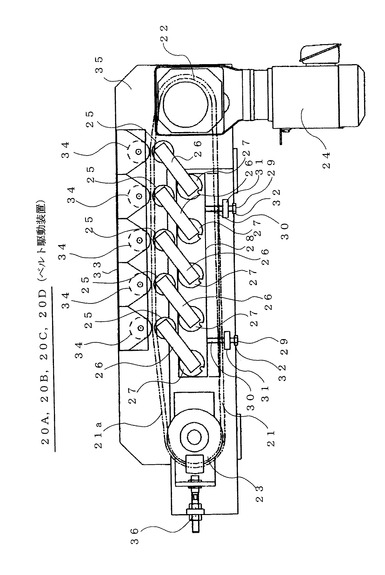
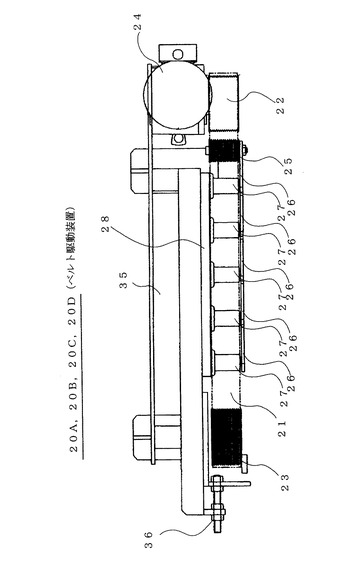
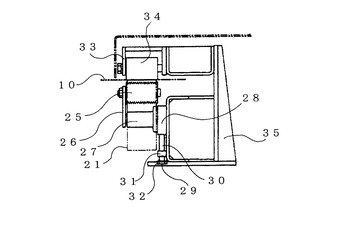
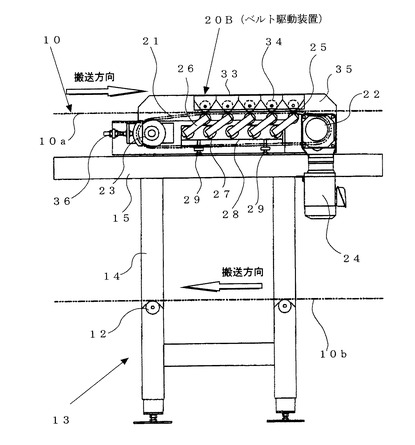
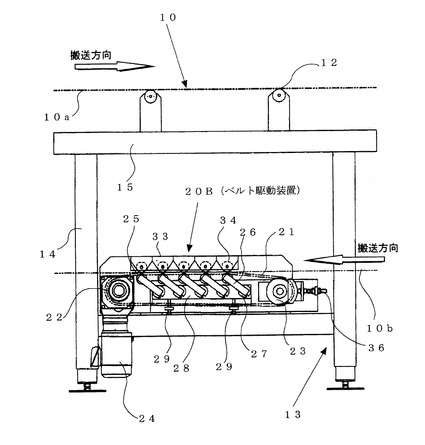
ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dは、図4〜図9に示すように、駆動側プーリ22と従動側プーリ23との間に張設された無端ベルトから成るフリクションベルト21と、駆動側プーリ22を介してフリクションベルト21を回転駆動するモータ24と、フリクションベルト21の上側のベルト21aの下面側に配され、フリクションベルト21の上側のベルト21a方向に付勢される複数のフリクションローラ25と、複数のフリクションローラ25をフリクションベルト21の上側のベルト21a方向に押圧する押圧装置29と、複数のフリクションローラ25と対向して配置され、押圧装置29によって押圧される複数のフリクションローラ25を上側のベルト21aを介して受け止める複数のローラ34を配置した受けローラ33とを備えている。
【0019】
フリクションベルト21としては、例えば、平形ベルトの柔軟性とV形ベルトの高伝動性を兼ね備えた高性能ベルト(商品名ポリバンロープ)を用いる。ポリバンロープは、高伝動馬力、小プーリ径が使用できる、伸びが少ない、ベルトの振動がないなどの特長がある。
駆動側プーリ22は、モータ24の回転軸に取り付けられている。モータ24は、機枠13に取り付けられるベースユニット35に取り付けられている。従動側プーリ23は、フリクションベルト21へのテンションを変更させるためのテークアップ36によって移動できるようにベースユニット35に取り付けられている。フリクションベルト21に伸びを生じたときには、テークアップ36を操作することによって、簡単に修正することができる。
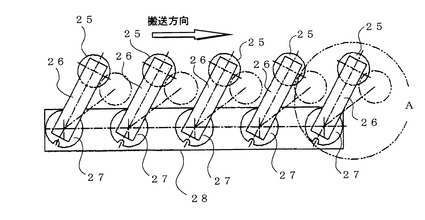
【0020】
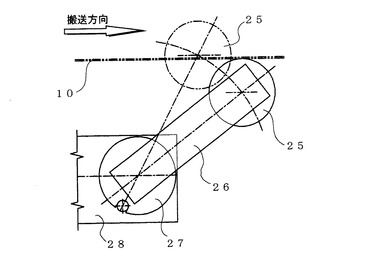
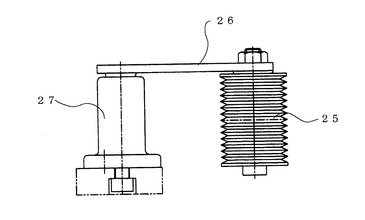
フリクションローラ25は、トーションバネ内蔵支持筒27の軸に固着されたアーム26の先端に設けられている。フリクションローラ25は、図7、図8に示すように、トーションバネ内臓支持筒27のトーションバネの復元力を利用してフリクションベルト21の上側のベルト21aに圧接させる方向に押し付けられる。トーションバネ内蔵支持筒27は、ベースユニット35に上下動自在に取り付けられた支持板28に取り付けられている。
【0021】
押圧装置29は、支持板28に取り付けたナット31と、このナット31を挿通する頭部を持つボルト30と、このボルト30の脚部を受け止める端部がボルト30の動きに応じてボルト中心軸方向にのみ動くようにベースユニット35にレールなどで動きが規制された支持板28とで構成されている。
図10〜図12は、ベルト駆動装置20Aおよび20Bを無端スチールベルト10の上段ベルト面10aに設けた例を示し、図13〜図15は、ベルト駆動装置20Cおよび20Dを無端スチールベルト10の下段ベルト面10bに設けた例を示す。
【0022】
蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dは、無端スチールベルト10の搬送方向と直交する方向に位置する無端スチールベルト10の両側縁部10c、10dより機枠13側に例えば10mm程度隔てて、発信(光)部41と受信(光)部42とをベルトを上下から挟む形で配置されている。蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dは、例えば、光電センサ、透過型ビームセンサ、レーザ式透過型センサなどのセンサによって構成されている。本実施形態では、図2、図3に示すように、発信(光)部41および受信(光)部42をベルトを上下から挟む形で対向配置し、発信(光)部40aおよび受信(光)部40bを無端スチールベルト10が横切った場合を蛇行と判定するようにしてある。蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dは、無端スチールベルト10が蛇行すると、無端スチールベルト10の何れかの側縁部10c、10d側へベルトが変位するので、その変位が蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dによって検出される。蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dは、図示しない制御装置を介してベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dのモータ24に連絡している。制御装置では、蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dによって検出される無端スチールベルト10の蛇行検出信号に基づいて、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dのモータ24の回転速度を制御して無端スチールベルト10の蛇行を防止する。
【0023】
次に、斯くして構成された本実施形態に係るベルトコンベヤ装置1の作用を説明する。
先ず、図7、図8に示すように、4つのベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dのトーションバネ内臓支持筒27のトーションバネを圧縮する方向に押圧するように、押圧装置29によって支持板28をフリクションベルト21の上側のベルト21a方向へ移動させる。これによって、フリクションローラ25が搬送方向に傾くように押し付けられ、トーションバネ内臓支持筒27のトーションバネを圧縮することとなる。
【0024】
次に、この状態で、電源を投入し、4つのベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dのモータ24を回転させる。これによって回転する駆動プーリ22に伴われてフリクションベルト21が回転する。この際、フリクションベルト21は、トーションバネ内臓支持筒27のトーションバネの復元力を利用してフリクションローラ25を受けローラ34方向へ押圧される。このため、フリクションベルト21と受けローラ34との間に位置する無端スチールベルト10の両側縁部10c、10dは、フリクションベルト21と無端スチールベルト10との摩擦力によってフリクションベルト21の移動方向へ押し出される。この押出力を連続して受けることによって無端スチールベルト10は搬送方向へ移動し、頭部プーリ11aと尾部プーリ11bとの間を回転することとなる。
【0025】
このようにして回転駆動する無端スチールベルト10は、4つのベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dによって把持される両側縁部10c、10d間を除く領域が搬送物を搬送する搬送路Cを形成する。そして、この搬送路Cは、無端スチールベルト10の上段ベッド面10aと下段ベッド面10cとに形成される。従って、無端スチールベルト10の上段ベッド面10aと下段ベッド面10cとの両方で搬送物を搬送することができるので、作業者は、上下の搬送路Cを利用して搬送物を処理することができる。
【0026】
この作業中に、本実施形態では、蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dの検出結果に基づいて、無端スチールベルト10の蛇行の有無が監視されている。蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dを、例えば、光電センサの発信(光)部41および受信(光)部42で構成した場合には、ベルト幅を隔てて搬送方向に直交に対向配置された蛇行検出部40Aまたは蛇行検出部40Bのどちらか、および蛇行検出部40Cまたは蛇行検出部40Dのどちらかにおいて、それぞれの光電センサの発信(光)部41および受信(光)部42のどれかを無端スチールベルト10が横切らなければ、光電センサの発信(光)部41および受信(光)部42は遮断されることがないので、蛇行が無いとして制御装置へ信号を送る。逆に、蛇行検出部40Aまたは蛇行検出部40Bにおける光電センサの発信(光)部41および受信(光)部42のどちらかを無端スチールベルト10が横切った場合には、光電センサの光受発信が遮断されるので、蛇行があるとして制御装置へ信号を送る。その場合には、対向配置する蛇行検出部40A、つまり光電センサの発信(光)部41と受信(光)部42との間、または蛇行部40B、つまり光電センサの発信(光)部41と受信(光)部42との間の何れかを無端スチールベルト10が横切ったことになるので、横切られた蛇行検出部40Aまたは蛇行検出部40B側のベルト駆動装置20Aまたはベルト駆動装置20Bの回転速度を速め、反対側のベルト駆動装置20Bまたはベルト駆動装置20Aの回転速度を遅くする操作を行う。蛇行検出部40Cまたは蛇行検出部40Dにおける光電センサの発信(光)部41および受信(光)部42のどちらかを無端スチールベルト10が横切った場合にも、ベルト駆動装置20Cおよびベルト駆動装置20Dを上記と同様な制御で回転速度を操作する。例えば、無端スチールベルト10の速度が100m/minの場合には、横切られた蛇行検出部40Aまたは40B、蛇行検出部40Cまたは40D側のベルト駆動装置20Aまたは20B、ベルト駆動装置20Cまたは20Dの回転速度を101m/minに速め、反対側のベルト駆動装置20Aまたは20B、ベルト駆動装置20Cまたは20Dの回転速度を99m/minに遅くする。そして、無端スチールベルト10の蛇行は、常に蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dの検出結果に基づいて制御装置で監視されているので、対向するベルト駆動装置20Aまたは20B、ベルト駆動装置20Cまたは20Dの回転速度を速やかに調整して無端スチールベルト10の蛇行を防止することができる。
【0027】
以上のように、本実施形態によれば、無端スチールベルト10の両端縁部10c、10dに対向配置したベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dと無端スチールベルト10との摩擦力によって無端スチールベルト10を回転駆動するので、頭尾部プーリ11a、11bに駆動力を付与しなくて良くなり、ユニットの小型化が可能となる。同時に、頭部プーリ11aおよび尾部プーリ11bの径も最小径(例えば、1mm厚ベルトの場合、850mm径)にすることが可能となる。また、ワーク重量や機長にかかわらず、プーリに掛かる力は大差が無くできるので、頭部プーリ11aおよび尾部プーリ11bをエンドユニットとして共通化できる。
【0028】
また、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dを無端スチールベルト10の両サイドに振り分けるので、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dを往き側にも帰り側にも設置でき、かつワークを往き側にも帰り側にも搬送可能である。
さらに、ワーク重量や機長が変更となっても、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dの設置数を増加して対応できるので、ドライブユニットを共通化できる。
【0029】
なお、上記実施形態では、4つのベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dを用いた場合について説明したが、本発明はこれに限らず、ワーク重量や機長に応じて設置数を増加することができる。
また、本発明では、上記実施形態における、ベルトコンベヤ装置1の上段ベット面10aの搬送路と、ベルトコンベヤ装置1の下段ベット面10bの搬送路とのそれぞれに、搬送物投入手段と、ベルトコンベヤ装置1の外に搬送物を払い出す仕分け手段とを備えることもできる。その場合、搬送物投入手段は、例えば、上下の折り返しプーリによって折り返されたベルトを持つベルトジャンクションコンベヤである。また、仕分け手段は、例えば、ダイバータである。
【図面の簡単な説明】
【0030】
【図1】本発明の一実施形態に係るベルトコンベヤ装置の平面図である。
【図2】図1の側面図である。
【図3】図1の頭部プーリ側の拡大図である。
【図4】図1のベルト駆動装置を示す正面図である。
【図5】図4の平面図である。
【図6】図4の側面図である。
【図7】図4のフリクションローラの説明図である。
【図8】図4のフリクションローラと無端スチールベルトとの関係を示す説明図である。
【図9】図4のフリクションローラとトーションバネ内蔵支持筒とアームとの関係を示す説明図である。
【図10】図1の上段ベルト面側を示す正面図である。
【図11】図10の平面図である。
【図12】図10の側面図である。
【図13】図1の下段ベルト面側を示す正面図である。
【図14】図13の平面図である。
【図15】図13の側面図である。
【符号の説明】
【0031】
1 ベルトコンベヤ装置
10 無端スチールベルト
10a 上段ベット面
10b 下段ベット面
10c、10d 無端スチールベルト10の両側縁部
11a 頭部プーリ
11b 尾部プーリ
12 ローラ
13 機枠
16、36 テークアップ
20A、20B、20C、20D ベルト駆動装置
21 フリクションベルト
22 駆動側プーリ
23 従動側プーリ
24 モータ
25 フリクションローラ
26 アーム
27 トーションバネ内蔵支持筒
29 押圧装置
33、34 ローラ
35 ベースユニット
40A、40B、40C、40D 蛇行検出部
41 発信(光)部
42 受信(光)部
C 搬送路
W 搬送路Cの幅
【技術分野】
【0001】
本発明は、スチールベルトを用いたベルトコンベヤ装置および搬送装置に関する。
【背景技術】
【0002】
従来、郵便局や宅配便業者などの仕分けセンタなどで長距離の仕分けラインで用いられるベルトコンベヤの中には、その長距離(例えば、50mなど)故のベルトの伸びを抑えるため、あるいは搬送方向に直交する払出の場合にそのワークの滑りやすさの点から、スチールベルト(例えば、1mm厚)を用いたベルトコンベヤ装置が使われている(例えば、特許文献1、2参照)。
【0003】
スチールベルトコンベヤの駆動は、従来エンドプーリを駆動するエンドプーリドライブ方式が採用されている(例えば、特許文献3参照)。
【特許文献1】特開2006−248642号公報
【特許文献2】特開2000−211729号公報
【特許文献3】実開平6−25215号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来のスチールベルトコンベヤでは、ドライブプーリとスチールベルトとの間のすべりを抑えるため極度のベルトテンションが必要となる。
また、このエンドプーリは蛇行防止のため、クラウン加工(プーリ縦断面でベルト接触面の中央がふくれている)を施され、そのクラウンによる蛇行防止効果を出すため、なまじ伸びのないスチールベルトでは、ベルトの張力を非常に大きくする必要がある。エンドプーリの頭部(駆動側)のクラウン効果およびスリップを防止して駆動を伝えるため、大掛かりなテンション付与機構が必要であり、尾部プーリについても、頭部のテンションの反力を受け持てるだけのテンション付与機構がやはり必要である。
【0005】
そのため、駆動プーリ、従動プーリとも、スチールベルトの厚み(例えば、1mm厚)の約1000倍の径が必要となり、往き側ベルトと帰り側ベルトとの間隔はプーリ径と同寸となって例えば1000mmの間隔となる。この寸法においてテークアップ機構をも備えるプーリ支持部分となるので、コンベヤフレームが大掛かりとなる。プーリシャフト径も、フレーム材の寸法も、ベアリングもそのテンションのため大型化せざるを得ない。そして、スチールベルトに強大な張力を付与するので、ベルトに傷があり万一破断した場合には、張力が急激に開放されることで、ベルト破片が周囲に非常に速い速度で飛び散り非常に危険である。また、ベルトの蛇行対策として、リタン側でローラ軸を傾けて蛇行修正する場合もある。しかし、この場合、さらにリターン側に帰りベルトを蛇行修正ローラに掛け回す機構が必要となり、さらに大掛かりになる。また、帰りベルトを掛け回したことで、帰り側のワーク搬送は不可能となる。
【0006】
本発明は斯かる従来の問題点を解決するために為されたもので、その目的は、駆動のための張力を少なくしコンベヤユニットの小型化によりコストを下げ、安定した走行を実現したベルトコンベヤ装置および搬送装置を提供することにある。
本発明の別の目的は、蛇行を確実に防止することができるベルトコンベヤ装置および搬送装置を提供することにある。
【課題を解決するための手段】
【0007】
請求項1に係る発明は、従動プーリ間に張設された無端スチールベルトと、搬送方向と直交する前記無端スチールベルトの両側縁部に配置され、摩擦駆動によって前記無端スチールベルトを駆動する少なくとも一対のベルト駆動装置とを備えたことを特徴とする。
請求項2に係る発明は、請求項1記載のベルトコンベヤ装置において、前記無端スチールベルトは、上段ベット面と下段ベット面とに搬送路を備えていることを特徴とする。
【0008】
請求項3に係る発明は、請求項1または請求項2記載のベルトコンベヤ装置において、前記一対のベルト駆動装置の上流側に蛇行検出部を搬送方向に直交する方向にベルト幅を隔てて対向配置するとともに、前記蛇行検出部による信号に基づいて前記一対のベルト駆動装置の相互の速度を調整する制御部をさらに設けたことを特徴とする。
請求項4に係る発明は、請求項1ないし請求項3の何れか記載のベルトコンベヤ装置において、前記一対のベルト駆動装置は、前記無端スチールベルトの上段ベット面および/または下段ベット面に配置されていることを特徴とする。
【0009】
請求項5に係る発明は、請求項1ないし請求項4の何れか記載のベルトコンベヤ装置において、前記一対のベルト駆動装置は、プーリ間に張設された無端ベルトと、前記無端ベルトを回転駆動するモータと、前記無端ベルトの上側のベルトの下面側に配され、前記無端ベルトの上側のベルト方向に付勢される複数のフリクションローラと、前記複数のフリクションローラを前記無端ベルトの上側のベルト方向に押圧する押圧装置と、前記複数のフリクションローラと対向して配置され、前記押圧装置によって押圧される前記複数のフリクションローラを前記上側のベルトを介して受け止める複数のローラを配置した受けローラとを備えていることを特徴とする。
【0010】
請求項6に係る発明は、請求項1ないし請求項5の何れか記載のベルトコンベヤ装置を用いた搬送装置であって、前記ベルトコンベヤ装置の上段ベット面の搬送路と、前記ベルトコンベヤ装置の下段ベット面の搬送路とのそれぞれに、搬送物投入手段と、前記ベルトコンベヤ装置の外に搬送物を払い出す仕分け手段とを備えたことを特徴とする。
請求項7に係る発明は、請求項6記載の搬送装置において、前記搬送物投入手段は、上下の折り返しプーリによって折り返されたベルトを持つベルトジャンクションコンベヤであることを特徴とする。
【0011】
請求項8に係る発明は、請求項6または請求項7記載の搬送装置において、前記仕分け手段は、ダイバータであることを特徴とする。
【発明の効果】
【0012】
頭尾部プーリに駆動力を付与しなくて良いので、ユニットの小型化が図れる。ワーク重量や機長にかかわらず、頭尾部プーリのシャフトに掛かる力は同等となるので、エンドユニットとして共通化できる。
駆動部を無端スチールベルトの両サイドに振り分けられるので、駆動部を往き側にも帰り側にも設置でき、かつワークを往き側にも帰り側にも搬送可能である。
【0013】
ワーク重量や機長が変更となっても、駆動部の設置数を増加して対応できるので、ドライブユニットを共通化できる。
無端スチールベルトの両サイドに設置したベルト駆動装置のフリクションドライブ速度を調整することで、蛇行を確実に防止することができる。
頭尾部プーリに駆動力を付与しなくて良いので、スチールベルトに掛かる張力が弱くなり、スチールベルトの長寿命化が達成できる。また、万一のベルト破断時の安全性が向上する。
【発明を実施するための最良の形態】
【0014】
以下、本発明を図面に示す実施形態に基づいて説明する。
図1〜図15は、本発明の一実施形態に係るベルトコンベヤ装置1を示す。
本実施形態に係るベルトコンベヤ装置1は、図1、図2に示すように、頭部プーリ11aと尾部プーリ11bとの間に無端スチールベルト10を張設し、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dによる摩擦駆動によって無端スチールベルト10を駆動するように構成されている。そして、本実施形態に係るベルトコンベヤ装置1には、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dによって駆動する無端スチールベルト10の蛇行を検知するための蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dが設置されている。
【0015】
無端スチールベルト10は、公知であり、例えば、その厚みが0.1〜1.5mm程度のものが市販されている。無端スチールベルト10の幅、長さは、用途に応じて適宜定められるが、幅は3000mmのものが市販されており、例えば、800mm〜2000mm程度、長さは目的、用途に応じて数m〜数百m程度になる。ただし、無端スチールベルト10の長さは、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dを複数箇所に設けることによって延長することは可能である。無端スチールベルト10は、上段ベット面10aと下段ベット面10bとで搬送可能になっている。
【0016】
頭部プーリ11aおよび尾部プーリ11bは、図1〜図3に示すように、多数の門型のフレーム14と横枠フレーム15とで構成する機枠13に組み付けられている。頭部プーリ11aおよび尾部プーリ11bは、従来のベルトコンベヤ装置と異なり、駆動手段を備えていない。つまり、頭部プーリ11aおよび尾部プーリ11bは、何れも従動プーリで構成されている。そして、頭部プーリ11aには、無端スチールベルト10に必要とされる張力を付与するための公知のテークアップ16が設けてある。各フレーム14には、ローラ12が取り付けられ、無端スチールベルト10の上段ベット面10aと下段ベット面10bとを支持している。機枠13は、床17上に設置されている。
【0017】
ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dは、図1〜図15に示すように、無端スチールベルト10の上段ベット面10aの頭部プーリ11a側と下段ベット面10bの尾部プーリ11b側とにおいて、無端スチールベルト10の搬送方向と直交する方向に位置する無端スチールベルト10の両側縁部10c、10dを挟み付けるように対向配置されている。無端スチールベルト10の両側縁部10c、10dは、搬送路Cの幅Wを確保するように設定されている。
【0018】
ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dは、図4〜図9に示すように、駆動側プーリ22と従動側プーリ23との間に張設された無端ベルトから成るフリクションベルト21と、駆動側プーリ22を介してフリクションベルト21を回転駆動するモータ24と、フリクションベルト21の上側のベルト21aの下面側に配され、フリクションベルト21の上側のベルト21a方向に付勢される複数のフリクションローラ25と、複数のフリクションローラ25をフリクションベルト21の上側のベルト21a方向に押圧する押圧装置29と、複数のフリクションローラ25と対向して配置され、押圧装置29によって押圧される複数のフリクションローラ25を上側のベルト21aを介して受け止める複数のローラ34を配置した受けローラ33とを備えている。
【0019】
フリクションベルト21としては、例えば、平形ベルトの柔軟性とV形ベルトの高伝動性を兼ね備えた高性能ベルト(商品名ポリバンロープ)を用いる。ポリバンロープは、高伝動馬力、小プーリ径が使用できる、伸びが少ない、ベルトの振動がないなどの特長がある。
駆動側プーリ22は、モータ24の回転軸に取り付けられている。モータ24は、機枠13に取り付けられるベースユニット35に取り付けられている。従動側プーリ23は、フリクションベルト21へのテンションを変更させるためのテークアップ36によって移動できるようにベースユニット35に取り付けられている。フリクションベルト21に伸びを生じたときには、テークアップ36を操作することによって、簡単に修正することができる。
【0020】
フリクションローラ25は、トーションバネ内蔵支持筒27の軸に固着されたアーム26の先端に設けられている。フリクションローラ25は、図7、図8に示すように、トーションバネ内臓支持筒27のトーションバネの復元力を利用してフリクションベルト21の上側のベルト21aに圧接させる方向に押し付けられる。トーションバネ内蔵支持筒27は、ベースユニット35に上下動自在に取り付けられた支持板28に取り付けられている。
【0021】
押圧装置29は、支持板28に取り付けたナット31と、このナット31を挿通する頭部を持つボルト30と、このボルト30の脚部を受け止める端部がボルト30の動きに応じてボルト中心軸方向にのみ動くようにベースユニット35にレールなどで動きが規制された支持板28とで構成されている。
図10〜図12は、ベルト駆動装置20Aおよび20Bを無端スチールベルト10の上段ベルト面10aに設けた例を示し、図13〜図15は、ベルト駆動装置20Cおよび20Dを無端スチールベルト10の下段ベルト面10bに設けた例を示す。
【0022】
蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dは、無端スチールベルト10の搬送方向と直交する方向に位置する無端スチールベルト10の両側縁部10c、10dより機枠13側に例えば10mm程度隔てて、発信(光)部41と受信(光)部42とをベルトを上下から挟む形で配置されている。蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dは、例えば、光電センサ、透過型ビームセンサ、レーザ式透過型センサなどのセンサによって構成されている。本実施形態では、図2、図3に示すように、発信(光)部41および受信(光)部42をベルトを上下から挟む形で対向配置し、発信(光)部40aおよび受信(光)部40bを無端スチールベルト10が横切った場合を蛇行と判定するようにしてある。蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dは、無端スチールベルト10が蛇行すると、無端スチールベルト10の何れかの側縁部10c、10d側へベルトが変位するので、その変位が蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dによって検出される。蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dは、図示しない制御装置を介してベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dのモータ24に連絡している。制御装置では、蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dによって検出される無端スチールベルト10の蛇行検出信号に基づいて、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dのモータ24の回転速度を制御して無端スチールベルト10の蛇行を防止する。
【0023】
次に、斯くして構成された本実施形態に係るベルトコンベヤ装置1の作用を説明する。
先ず、図7、図8に示すように、4つのベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dのトーションバネ内臓支持筒27のトーションバネを圧縮する方向に押圧するように、押圧装置29によって支持板28をフリクションベルト21の上側のベルト21a方向へ移動させる。これによって、フリクションローラ25が搬送方向に傾くように押し付けられ、トーションバネ内臓支持筒27のトーションバネを圧縮することとなる。
【0024】
次に、この状態で、電源を投入し、4つのベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dのモータ24を回転させる。これによって回転する駆動プーリ22に伴われてフリクションベルト21が回転する。この際、フリクションベルト21は、トーションバネ内臓支持筒27のトーションバネの復元力を利用してフリクションローラ25を受けローラ34方向へ押圧される。このため、フリクションベルト21と受けローラ34との間に位置する無端スチールベルト10の両側縁部10c、10dは、フリクションベルト21と無端スチールベルト10との摩擦力によってフリクションベルト21の移動方向へ押し出される。この押出力を連続して受けることによって無端スチールベルト10は搬送方向へ移動し、頭部プーリ11aと尾部プーリ11bとの間を回転することとなる。
【0025】
このようにして回転駆動する無端スチールベルト10は、4つのベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dによって把持される両側縁部10c、10d間を除く領域が搬送物を搬送する搬送路Cを形成する。そして、この搬送路Cは、無端スチールベルト10の上段ベッド面10aと下段ベッド面10cとに形成される。従って、無端スチールベルト10の上段ベッド面10aと下段ベッド面10cとの両方で搬送物を搬送することができるので、作業者は、上下の搬送路Cを利用して搬送物を処理することができる。
【0026】
この作業中に、本実施形態では、蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dの検出結果に基づいて、無端スチールベルト10の蛇行の有無が監視されている。蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dを、例えば、光電センサの発信(光)部41および受信(光)部42で構成した場合には、ベルト幅を隔てて搬送方向に直交に対向配置された蛇行検出部40Aまたは蛇行検出部40Bのどちらか、および蛇行検出部40Cまたは蛇行検出部40Dのどちらかにおいて、それぞれの光電センサの発信(光)部41および受信(光)部42のどれかを無端スチールベルト10が横切らなければ、光電センサの発信(光)部41および受信(光)部42は遮断されることがないので、蛇行が無いとして制御装置へ信号を送る。逆に、蛇行検出部40Aまたは蛇行検出部40Bにおける光電センサの発信(光)部41および受信(光)部42のどちらかを無端スチールベルト10が横切った場合には、光電センサの光受発信が遮断されるので、蛇行があるとして制御装置へ信号を送る。その場合には、対向配置する蛇行検出部40A、つまり光電センサの発信(光)部41と受信(光)部42との間、または蛇行部40B、つまり光電センサの発信(光)部41と受信(光)部42との間の何れかを無端スチールベルト10が横切ったことになるので、横切られた蛇行検出部40Aまたは蛇行検出部40B側のベルト駆動装置20Aまたはベルト駆動装置20Bの回転速度を速め、反対側のベルト駆動装置20Bまたはベルト駆動装置20Aの回転速度を遅くする操作を行う。蛇行検出部40Cまたは蛇行検出部40Dにおける光電センサの発信(光)部41および受信(光)部42のどちらかを無端スチールベルト10が横切った場合にも、ベルト駆動装置20Cおよびベルト駆動装置20Dを上記と同様な制御で回転速度を操作する。例えば、無端スチールベルト10の速度が100m/minの場合には、横切られた蛇行検出部40Aまたは40B、蛇行検出部40Cまたは40D側のベルト駆動装置20Aまたは20B、ベルト駆動装置20Cまたは20Dの回転速度を101m/minに速め、反対側のベルト駆動装置20Aまたは20B、ベルト駆動装置20Cまたは20Dの回転速度を99m/minに遅くする。そして、無端スチールベルト10の蛇行は、常に蛇行検出部40Aおよび40B、蛇行検出部40Cおよび40Dの検出結果に基づいて制御装置で監視されているので、対向するベルト駆動装置20Aまたは20B、ベルト駆動装置20Cまたは20Dの回転速度を速やかに調整して無端スチールベルト10の蛇行を防止することができる。
【0027】
以上のように、本実施形態によれば、無端スチールベルト10の両端縁部10c、10dに対向配置したベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dと無端スチールベルト10との摩擦力によって無端スチールベルト10を回転駆動するので、頭尾部プーリ11a、11bに駆動力を付与しなくて良くなり、ユニットの小型化が可能となる。同時に、頭部プーリ11aおよび尾部プーリ11bの径も最小径(例えば、1mm厚ベルトの場合、850mm径)にすることが可能となる。また、ワーク重量や機長にかかわらず、プーリに掛かる力は大差が無くできるので、頭部プーリ11aおよび尾部プーリ11bをエンドユニットとして共通化できる。
【0028】
また、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dを無端スチールベルト10の両サイドに振り分けるので、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dを往き側にも帰り側にも設置でき、かつワークを往き側にも帰り側にも搬送可能である。
さらに、ワーク重量や機長が変更となっても、ベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dの設置数を増加して対応できるので、ドライブユニットを共通化できる。
【0029】
なお、上記実施形態では、4つのベルト駆動装置20Aおよび20B、ベルト駆動装置20Cおよび20Dを用いた場合について説明したが、本発明はこれに限らず、ワーク重量や機長に応じて設置数を増加することができる。
また、本発明では、上記実施形態における、ベルトコンベヤ装置1の上段ベット面10aの搬送路と、ベルトコンベヤ装置1の下段ベット面10bの搬送路とのそれぞれに、搬送物投入手段と、ベルトコンベヤ装置1の外に搬送物を払い出す仕分け手段とを備えることもできる。その場合、搬送物投入手段は、例えば、上下の折り返しプーリによって折り返されたベルトを持つベルトジャンクションコンベヤである。また、仕分け手段は、例えば、ダイバータである。
【図面の簡単な説明】
【0030】
【図1】本発明の一実施形態に係るベルトコンベヤ装置の平面図である。
【図2】図1の側面図である。
【図3】図1の頭部プーリ側の拡大図である。
【図4】図1のベルト駆動装置を示す正面図である。
【図5】図4の平面図である。
【図6】図4の側面図である。
【図7】図4のフリクションローラの説明図である。
【図8】図4のフリクションローラと無端スチールベルトとの関係を示す説明図である。
【図9】図4のフリクションローラとトーションバネ内蔵支持筒とアームとの関係を示す説明図である。
【図10】図1の上段ベルト面側を示す正面図である。
【図11】図10の平面図である。
【図12】図10の側面図である。
【図13】図1の下段ベルト面側を示す正面図である。
【図14】図13の平面図である。
【図15】図13の側面図である。
【符号の説明】
【0031】
1 ベルトコンベヤ装置
10 無端スチールベルト
10a 上段ベット面
10b 下段ベット面
10c、10d 無端スチールベルト10の両側縁部
11a 頭部プーリ
11b 尾部プーリ
12 ローラ
13 機枠
16、36 テークアップ
20A、20B、20C、20D ベルト駆動装置
21 フリクションベルト
22 駆動側プーリ
23 従動側プーリ
24 モータ
25 フリクションローラ
26 アーム
27 トーションバネ内蔵支持筒
29 押圧装置
33、34 ローラ
35 ベースユニット
40A、40B、40C、40D 蛇行検出部
41 発信(光)部
42 受信(光)部
C 搬送路
W 搬送路Cの幅
【特許請求の範囲】
【請求項1】
従動プーリ間に張設された無端スチールベルトと、
搬送方向と直交する前記無端スチールベルトの両側縁部に配置され、摩擦駆動によって前記無端スチールベルトを駆動する少なくとも一対のベルト駆動装置と
を備えたことを特徴とするベルトコンベヤ装置。
【請求項2】
請求項1記載のベルトコンベヤ装置において、
前記無端スチールベルトは、上段ベット面と下段ベット面とに搬送路を備えている
ことを特徴とするベルトコンベヤ装置。
【請求項3】
請求項1または請求項2記載のベルトコンベヤ装置において、
前記一対のベルト駆動装置の上流側に蛇行検出部を搬送方向に直交する方向にベルト幅を隔てて対向配置するとともに、前記蛇行検出部による信号に基づいて前記一対のベルト駆動装置の相互の速度を調整する制御部をさらに設けた
ことを特徴とするベルトコンベヤ装置。
【請求項4】
請求項1ないし請求項3の何れか記載のベルトコンベヤ装置において、
前記一対のベルト駆動装置は、前記無端スチールベルトの上段ベット面および/または下段ベット面に配置されている
ことを特徴とするベルトコンベヤ装置。
【請求項5】
請求項1ないし請求項4の何れか記載のベルトコンベヤ装置において、
前記一対のベルト駆動装置は、
プーリ間に張設された無端ベルトと、
前記無端ベルトを回転駆動するモータと、
前記無端ベルトの上側のベルトの下面側に配され、前記無端ベルトの上側のベルト方向に付勢される複数のフリクションローラと、
前記複数のフリクションローラを前記無端ベルトの上側のベルト方向に押圧する押圧装置と、
前記複数のフリクションローラと対向して配置され、前記押圧装置によって押圧される前記複数のフリクションローラを前記上側のベルトを介して受け止める複数のローラを配置した受けローラと
を備えている
ことを特徴とするベルトコンベヤ装置。
【請求項6】
請求項1ないし請求項5の何れか記載のベルトコンベヤ装置を用いた搬送装置であって、
前記ベルトコンベヤ装置の上段ベット面の搬送路と、前記ベルトコンベヤ装置の下段ベット面の搬送路とのそれぞれに、搬送物投入手段と、前記ベルトコンベヤ装置の外に搬送物を払い出す仕分け手段とを備えた
ことを特徴とする搬送装置。
【請求項7】
請求項6記載の搬送装置において、
前記搬送物投入手段は、上下の折り返しプーリによって折り返されたベルトを持つベルトジャンクションコンベヤである
ことを特徴とする搬送装置。
【請求項8】
請求項6または請求項7記載の搬送装置において、
前記仕分け手段は、ダイバータである
ことを特徴とする搬送装置。
【請求項1】
従動プーリ間に張設された無端スチールベルトと、
搬送方向と直交する前記無端スチールベルトの両側縁部に配置され、摩擦駆動によって前記無端スチールベルトを駆動する少なくとも一対のベルト駆動装置と
を備えたことを特徴とするベルトコンベヤ装置。
【請求項2】
請求項1記載のベルトコンベヤ装置において、
前記無端スチールベルトは、上段ベット面と下段ベット面とに搬送路を備えている
ことを特徴とするベルトコンベヤ装置。
【請求項3】
請求項1または請求項2記載のベルトコンベヤ装置において、
前記一対のベルト駆動装置の上流側に蛇行検出部を搬送方向に直交する方向にベルト幅を隔てて対向配置するとともに、前記蛇行検出部による信号に基づいて前記一対のベルト駆動装置の相互の速度を調整する制御部をさらに設けた
ことを特徴とするベルトコンベヤ装置。
【請求項4】
請求項1ないし請求項3の何れか記載のベルトコンベヤ装置において、
前記一対のベルト駆動装置は、前記無端スチールベルトの上段ベット面および/または下段ベット面に配置されている
ことを特徴とするベルトコンベヤ装置。
【請求項5】
請求項1ないし請求項4の何れか記載のベルトコンベヤ装置において、
前記一対のベルト駆動装置は、
プーリ間に張設された無端ベルトと、
前記無端ベルトを回転駆動するモータと、
前記無端ベルトの上側のベルトの下面側に配され、前記無端ベルトの上側のベルト方向に付勢される複数のフリクションローラと、
前記複数のフリクションローラを前記無端ベルトの上側のベルト方向に押圧する押圧装置と、
前記複数のフリクションローラと対向して配置され、前記押圧装置によって押圧される前記複数のフリクションローラを前記上側のベルトを介して受け止める複数のローラを配置した受けローラと
を備えている
ことを特徴とするベルトコンベヤ装置。
【請求項6】
請求項1ないし請求項5の何れか記載のベルトコンベヤ装置を用いた搬送装置であって、
前記ベルトコンベヤ装置の上段ベット面の搬送路と、前記ベルトコンベヤ装置の下段ベット面の搬送路とのそれぞれに、搬送物投入手段と、前記ベルトコンベヤ装置の外に搬送物を払い出す仕分け手段とを備えた
ことを特徴とする搬送装置。
【請求項7】
請求項6記載の搬送装置において、
前記搬送物投入手段は、上下の折り返しプーリによって折り返されたベルトを持つベルトジャンクションコンベヤである
ことを特徴とする搬送装置。
【請求項8】
請求項6または請求項7記載の搬送装置において、
前記仕分け手段は、ダイバータである
ことを特徴とする搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2008−230806(P2008−230806A)
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願番号】特願2007−75304(P2007−75304)
【出願日】平成19年3月22日(2007.3.22)
【出願人】(000001834)三機工業株式会社 (316)
【Fターム(参考)】
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願日】平成19年3月22日(2007.3.22)
【出願人】(000001834)三機工業株式会社 (316)
【Fターム(参考)】
[ Back to top ]