
ラックを移送するための把持装置
【課題】本発明は、ラックを把持するための把持部分(7)として端部が構成されている一対の把持アーム(2)を含んで構成される把持機構を備えた、特には組織学的な検査用の組織試料を準備するためのシステム内において、試料スライド(4)用のラック(3)を移送するための把持装置に関するものであり、自動染色装置及び自動封入装置において多岐にわたり使用可能であり、製造コストの軽減に寄与する把持装置を創作する。
【解決手段】把持部分(7)は、水平状態にあるラック(3)を把持するための第1形状部と、垂直状態にあるラック(3)を把持するための第2形状部を有する。
【解決手段】把持部分(7)は、水平状態にあるラック(3)を把持するための第1形状部と、垂直状態にあるラック(3)を把持するための第2形状部を有する。
【発明の詳細な説明】
【技術分野】
【0001】
(関連出願の記載)
本出願は、2011年5月13日出願のドイツ特許出願第 10 2011 110 250.0 号の優先権主張に基づくものであり、同出願の全記載内容は引用をもって本明細書に組み込み記載されているものとする。
【0002】
本発明は、ラックを把持するための把持部分として端部が構成されている一対の把持アーム(Greifschenkel)を含んで構成される把持機構を備えた、試料スライド(試料支持体)用のラックを移送するための把持装置に関するものであり、特には組織学的な検査用の組織試料(組織検体 Gewebeproben)を準備するためのシステム内において、試料スライド用のラックを移送するための把持装置に関する。
【背景技術】
【0003】
特にこの種の装置は、顕微鏡を用いたその後の分析のために、試料スライド上の組織学的な切片のような染色処理されたプレパラート或いは組織試料に対してカバーガラスが取り付けられるシステムにおいて使用される。プレパラートの染色処理は自動染色装置(自動ステイニング装置 Faerbeautomat)において行われ、該自動染色装置内において、組織試料を有する試料スライドはラック或いは試料スライド保持器をもって仕分けされ、これらのラック或いは試料スライド保持器と共に染色容器内へ浸漬される。このプロセス中、試料スライドは、水平に配向されたラック内において垂直に相並んで配置されている。この際、中でもラックについては、ラックバスケット部材(ラック籠状部材)が旋回可能なハンガー部材に懸架されており該ハンガー部材を用いてラックを把持移送装置により把持して移送することのできるラックが使用される。このハンガー部材は、ラックから試料スライドが意図せずに逸脱してしまうことを防止する閉鎖機構としても機能する。染色処理後にラックは自動封入装置(自動カバースリッピング装置 Eindeckautomat)へ移行され、そこで封入プロセスが実行される。
【0004】
封入処理前に試料スライドは、通常、先ずは、封入処理時に使用される封入剤のより良い流れ特性(流動力学的性質)を保証するために、溶剤(キシレン)の入った搬入域キュベット(インプットキュベット)内に入れられる。引き続きラックは試料スライドと共に封入処理経路(Eindeckstrasse)へ移送され、そこで先ずは封入剤(接着剤又はそれに類似するもの)が試料スライド上へ塗布され、引き続き、組織試料を閉じ込めるためにカバーガラスが載置される。試料スライドから封入剤が流れ落ちることを防止するために、試料スライドは水平に配向されなくてはならない。そのために全ラックが旋回され、該旋回により試料スライドも同様に横転されて(90度傾回動されて)水平に配向される(所謂ラックプロセッシングという)。引き続きラックは、把持移送装置により封入処理経路へ運ばれ、封入プロセスが開始される。
【0005】
下記特許文献1から、ラックを自動染色装置から自動封入装置へ移動させ、該ラックを該自動封入装置内において降下される移送装置が公知である。自動封入装置においてラックは試料スライドと共に溶剤の入ったタンク内へ降下される。自動封入装置はラックを検知し、封入過程を開始する。全ての試料スライドが封入処理されて自動封入装置内の固有の搬出用ラック内へ収納された後に、空のラックが搬出される。移送装置は、ラック搭載ステーションの後壁と平行なレールから構成されており、該レールにおいてラック用の把持器が該レールに対して垂直及び平行に移動可能である。該把持具は、ラックのアングル部材と噛み合う溝部を有し、それによりラックは一側面においてのみ保持される。
【0006】
ラック内に配置された試料スライドを処理する(取り扱う)ための他の移送装置が下記特許文献2に記載されており、該移送装置は、ラックを処理ステーションへ供給するため或いはラックを処理ステーションから取り出すため、並びに後連結された装置へラックを転送するために用いられる。該移送装置は、端部側に把持器を備えたロボットアームとして構成されており、この際、該ロボットアームは複数の部分アームから構成され、垂直軸線に関して高さ調節可能且つ回転可能に配設されている。該移送装置は、ラックを把持し、該ラックを持ち上げ、該ラックを次の処理ステーションへ移送する。
【0007】
尚、先行技術文献として挙げられた下記特許文献の全開示内容は、これらの引用をもって本明細書に組み込み記載されているものとする。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】DE 101 44 041 A1
【特許文献2】DE 100 41 230 A1
【発明の概要】
【発明が解決しようとする課題】
【0009】
以下の分析は、本発明により与えられる。即ち上記特許文献1に示す移送装置では、ラックの移送の自由度が制限されている。また上記特許文献2に示す移送装置では、ロボットアームによりラックを高さ調節可能且つ回転可能に移送できるが、把持装置の機能は、ラックの持ち上げと更なる移送とに限られている。しかしラックプロセッシングのためにこの装置は適してなく、全ラックが旋回され且つその後に封入処理経路へ提供される自動封入装置において使用することはできない。その代わり、方向転換されたラックに対して特別に製作された補助的な把持装置が必要であろうが、このことは全システムをより高価でより複雑なものとする。
【0010】
本発明の課題は、自動染色装置及び自動封入装置において多岐にわたり使用可能であり、製造コストの軽減に寄与する、冒頭に掲げた形式の把持装置を創作することである。
【課題を解決するための手段】
【0011】
本発明の一視点によれば、ラックを把持するための把持部分として端部が構成されている一対の把持アームを含んで構成される把持機構を備えた、特には組織学的な検査用の組織試料を準備するためのシステム内において、試料スライド用のラックを移送するための把持装置が提供される。当該把持装置において、前記把持部分は、水平状態にあるラックを把持するための第1形状部と、垂直状態にあるラックを把持するための第2形状部を有する。
【発明の効果】
【0012】
本発明の上記一視点によれば、本発明の課題に対応する効果、即ち自動染色装置及び自動封入装置において多岐にわたり使用可能であり、製造コストの軽減に寄与する把持装置が提供される。
【発明を実施するための形態】
【0013】
本発明の一実施形態において、把持部分は別個の第1形状部(第1プロフィール部)と第2形状部(第2プロフィール部)とを有し、この際、第1形状部は、水平状態にあるラック(横置状態のラック:試料スライドは垂直状態にある)を把持するために構成され、第2形状部は、垂直状態にあるラック(縦置状態のラック:試料スライドは水平状態にある)を把持するために構成されている。このようにして、異なる複数の把持要素を備えた複数の移送装置の機能を、有利にも1つだけの把持装置を備えた1つの移送装置に組み込むことができる。この際、第1形状部は、全ラックが染色容器内へ浸漬される自動染色装置において頻繁に要求されるように、水平に配向されたラックが例えばそのラックハンガー部において把持され、移送することができるように構成されている。第2形状部は、垂直に配向されたラックを把持するために形成されており、それにより該ラックは、自動封入装置の特別な処理ステーションへ運ばれるか又はこれらの処理ステーション内へ挿入可能である。様々なポジションにおいてラックを把持する可能性により、自動染色装置内及び自動封入装置内の移送に関して極めて異なる要求に対応することができる。異なった構成の把持器を備えた多数の異なる移送システムの代わりに、唯一の移送装置を汎用的に使用することができる。つまり自動染色装置から来るラックを先ずは自動封入装置へ移送し、該自動封入装置の適切な箇所に降ろすことができる。それに続く封入プロセスのためにラックは、試料スライドを水平に配向させるために別個の旋回ユニットを用いて旋回することができる。そして同じ把持装置を用いてラックを封入処理経路へ供給することができる。本発明によるこの構成は、対応する自動装置の製造コストを多大に減少させる。
【0014】
以下、本発明の好ましい実施形態の概要について説明する。
【0015】
第1形状部がラックハンガー部材を把持するために構成されていると特に有利であると証明されている。このことは、高い移送確実性を可能とし、複数のラックを自動装置内へもたらす場合にこれらのラックの移送を容易化する。本発明の別の一実施形態では、第2形状部がラックバスケット部材を把持するために構成されており、この際、第2形状部は、目的に適い、ラックバスケット部材の外側形状部へ形状的にマッチされている。
【0016】
本発明の更に別の一実施形態では、把持アームが並進摺動可能な摺動要素と連結されており、従って把持アームが該摺動要素の並進運動により開閉される。このようにして把持装置を簡単な構造で小さくコンパクトに構成することができる。また小さい操作力を大きな把持力に変換することもできる。それに対応して駆動部のサイジングが小さくなる。
【0017】
本発明の思想の更なる構成では、摺動要素を、ねじスピンドル上にねじ込まれた(螺入された)円錐形状のねじナットとすることができ、この際、該ねじナットは把持装置において並進運動可能であるが回転運動不能に案内されており、従ってねじスピンドルの回転運動がねじナットの並進運動をもたらすことになる。周知の他の装置が大きな把持力のためにそれに対応して大きくサイジングされた電動式又は気体式の駆動部を必要とするのに対し、本発明に従う駆動機構は、僅かな費用と比較的小さい構成空間にもかかわらず大きな力を発生させることができる。
【0018】
好ましくは、摺動要素の摺動のために、電気式、気体式、又は液体式の駆動部が用いられる。つまり例えば、ねじスピンドルのために回転駆動部が使用される。それにより大きな把持力にもかかわらず小さい構成空間という要求に対応している。
【0019】
操作力をできるだけ小さく保つために、予張力の与えられた(プリテンションされた)ばね要素が把持アームを閉鎖ポジション又は開放ポジションにおいて保持することが考慮されている。そのようなばね要素としては、例えば、引張りばね、圧縮ばねなどが用いられ、従って費やすべき操作力は一方向にだけ作用させるようにすればよい。
【0020】
ねじスピンドルのねじピッチが、駆動力(Antriebskraft)と拡開力(Spreizkraft)との間の比率がほぼ0.2の値を有するように選択されていることが特に有利であると証明されている。
【0021】
ラックの把持と移送を特に確実にするために、本発明の別の一実施形態では、好ましくは誘導型アナログセンサであるセンサが、摺動要素又は把持アームのポジション検知のために設けられている。
【0022】
上記のごとく本発明において下記形態が可能である。下記各形態は、本願の特許請求の範囲(当初)の各請求項に記載した各々の構成要件に対応している。尚、本願の特許請求の範囲に付記されている図面参照符号は専ら本発明の理解の容易化のためのものであり、図示の形態への限定を意図するものではないことを付言する。
(形態1)上記一視点のとおり、ラックを把持するための把持部分として端部が構成されている一対の把持アームを含んで構成される把持機構を備えた、特には組織学的な検査用の組織試料を準備するためのシステム内において、試料スライド用のラックを移送するための把持装置であって、前記把持部分は、水平状態にあるラックを把持するための第1形状部と、垂直状態にあるラックを把持するための第2形状部を有すること。
(形態2)水平状態にあるラックを把持するための前記第1形状部は、ラックハンガー部材を把持するために構成されていることが好ましい。
(形態3)垂直状態にあるラックを把持するための前記第2形状部は、ラックバスケット部材を把持するために構成されていることが好ましい。
(形態4)前記把持アームは、並進摺動可能な摺動要素と連結されていること、及び、前記把持アームは、前記摺動要素の並進運動により開閉されることが好ましい。
(形態5)前記摺動要素は、ねじスピンドル上にねじ込まれた円錐形状のねじナットであり、該ねじナットは、当該把持装置において並進運動可能であるが回転運動不能に案内されており、従って前記ねじスピンドルの回転運動が前記ねじナットの並進運動をもたらすことが好ましい。
(形態6)前記摺動要素の摺動のために、電気式、気体式、又は液体式の駆動部が設けられていることが好ましい。
(形態7)予張力の与えられたばね要素が、前記把持アームを閉鎖ポジション又は開放ポジションにおいて保持することが好ましい。
(形態8)前記ねじスピンドルのねじピッチが、駆動力と拡開力との間の比率がほぼ0.2の値を有するように選択されていることが好ましい。
(形態9)好ましくは誘導型アナログセンサであるセンサが、前記摺動要素又は前記把持アームのポジション検知のために設けられていることが好ましい。
【0023】
以下、添付の図面に図示された本発明の具体的な実施例について詳細に説明する。この際、上述の全ての記載内容及び/又は図面に図示の記載内容は、本願の特許請求の範囲における各々の請求項の構成要件又はそれらの従属関係に依存せず、それ自体で又は任意の組み合わせをもって本発明の対象であることを付言する。
【0024】
本明細書に添付の図面の簡単な説明は、以下のとおりである。
【図面の簡単な説明】
【0025】
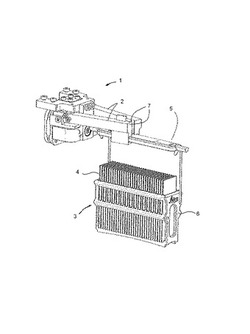
【図1】水平状態に配置されたラックを備えた、本発明による把持装置の一実施例を示す斜視図である。
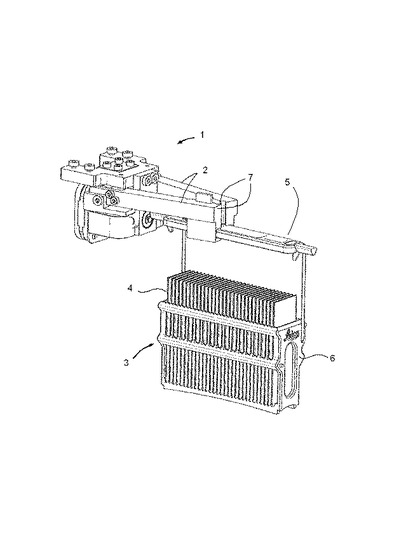
【図2】図1に対応する図として、垂直状態に配置されたラックを備えた把持装置を示す斜視図である。
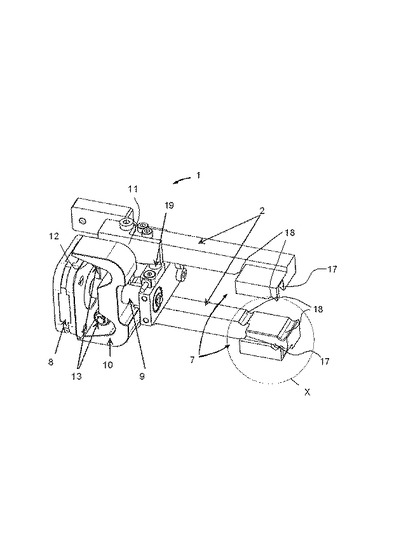
【図3】図1による把持装置の詳細を示す斜視図である。
【図4】図3に図示された把持装置を3箇所の異なる把持アームポジションにおいて示す俯瞰平面図である。
【図5】図3において(円で囲まれた)X部分を示す拡大詳細図である。
【実施例】
【0026】
図1に図示されている把持装置1は2つの把持アーム2を有し、該把持アーム2を用いて把持装置1は、試料スライド(試料支持体)4が垂直に相並んで挿入されているラック3を保持する。ラック3は、該ラック3のラックバスケット部材6が懸架されているラックハンガー部材5を有する。把持アーム2の前側端部は、ラックハンガー部材5を把持する把持部分7として構成されている。ラックハンガー部材5を用い、把持装置1が連結されている非図示の移送装置によりラック3が移送可能である。図1において水平に配向されたラック(横置状態のラック:試料スライドは垂直状態にある)の移送は、特には、ラックが自動染色装置(自動ステイニング装置 Faerbeautomat)内において移送される場合、又はラックが自動封入装置(自動カバースリッピング装置 Eindeckautomat)内において搬入域キュベット(インプットキュベット)内へ降下され、そして該搬入域キュベットから取り出される場合に行われるが、その理由は、ラック3内における試料スライド4の垂直の配向が組織試料における染色剤(Faerbemittel)の最適の排出を保証するためである。
【0027】
ところで封入プロセス前には、試料スライド4が水平に配向されるためにラック3が旋回(方向転換)されなくてはならない。図2に示されているように把持装置1は、旋回された状態のラック3(縦置状態のラック:試料スライドは水平状態にある)も把持することができる。この場合、把持部分7はラック3のラックバスケット部材(フレーム状部材)6を固定保持している。
【0028】
図3は把持装置1の詳細図を示している。把持装置1の駆動部としてステップモータ8が用いられ、該ステップモータ8には、非図示の外ねじ(雄ねじ)を備えたねじスピンドル9が連結されている。ねじスピンドル9の外ねじにマッチする円錐形状のねじナット10がねじスピンドル9上にねじ込まれている(螺入されている)。ねじナット10は、案内部分11において並進運動可能であるが、把持装置1において回転運動不能に案内されている。ステップモータ8を用いたねじスピンドル9の回転により、ねじナット10は、ねじスピンドル9とのねじ係合の結果、ねじスピンドル9に沿って並進方向において移動する。この際、回転方向に応じ、ねじナット10はステップモータ8から離れていく又はステップモータ8へ近付いていく。
【0029】
ねじナット10は、該ねじナット10の内側において円錐部分12を有し、該円錐部分12は把持部分7の方向へ先細りになっている。円錐部分12は、把持アーム2に取り付けられている2つの球軸受け(ボールベアリング)13と協働する。これらの球軸受け13は、各々、把持アーム2において(把持アーム2の長手方向で見て)把持部分7とは反対側に配設されている。図4(a)〜4(c)が示しているように把持アーム2は回転点(枢支軸)14の周りで旋回(回動)可能である。ねじナット10が摺動されると、円錐部分12が球軸受け13と協働する。即ち円錐部分12は、球軸受け13に対するカム面を成す。ねじナット10が後方へ、即ちステップモータ8の方向へ動くと、円錐部分12が球軸受け13を内側へ押し付け、それにより把持アーム2の後側部分が同様に内側へ押し寄せられる。この際、把持アーム2は回転点14の周りで旋回し、この旋回により、図4(a)で図示されているように把持アーム2の把持部分7が互いに離れていくように動かされる。
【0030】
図4(a)に示された位置は、ラックを把持する準備のできている開放ポジションにおいて把持装置1を示している。この際、ラックは水平(横置状態)又は垂直(縦置状態)に配向されていることが可能である。把持アーム2の非対称のねじれのねじれ防止部として、即ち把持アーム2の同期された動きのために噛合セグメント15が設けられている。
【0031】
把持装置1を閉じるには、ねじスピンドル9が(把持アーム2を開いた際のねじスピンドル9の回転方向とは)反対方向へ回転され、それによりねじナット10がねじスピンドル9に沿って前方へ、即ちステップモータ8から離れる方向へ動く。この動きが図4(b)と図4(c)に図示されている。この際、ねじナット10の円錐部分12は前方へ摺動され、それにより球軸受け13が再び外側へ動ける状態へ移動される。両方の把持アーム2の間には圧縮ばね16が配設されており、該圧縮ばね16が球軸受け13を備えた両方の把持アーム2の端部分を外側へ押し付ける。この際、回転点14を介してこの圧縮ばね16はレバーのように作用し、それにより把持部分7が互いの方向へ押し寄せられる。把持部分7とラック3との間に作用する垂直力(Normalkraefte)の印加は圧縮ばね16を介してのみ行われる。従ってステップモータ8とねじスピンドル9とねじナット10から構成される駆動機構は、主として、開放ポジションと閉鎖ポジションの位置調節のため、そして開放過程のための力の印加のために必要である。稼動時に必要な全エネルギー消費は、それに対応して低く保つことができる。ねじナット10は(てこのように)該ねじナット10が所定の倍率、一例として5倍の機械的倍率(力の変換比率 Uebersetzung)を可能とするように設計されており、このことは、駆動力(Antriebskraft)と拡開力(Spreizkraft)との間の比率(作用点(拡開力)に対する力点(駆動力)の比率)がほぼ0.2の値を有することを意味する。つまり閉鎖力が大きいにもかかわらず、把持器は小さい操作力を用いて開くことができる。
【0032】
図5には、図3の(円で囲まれた)X部分から、把持アーム2において特殊形状形成された把持部分7が詳細図として示されている。把持アーム2の前側の把持部分7は、第1形状部(第1プロフィール部)17と第2形状部(第2プロフィール部)18とを有する。第2形状部18は、把持アーム2に対して実質的に左右方向(横方向)に延在し、窪み形状の2つの凹部から形成されている。この際、第2形状部18は、ラックバスケット部材(フレーム状部材)6の外側形状部へ形状的にマッチされ、図2が示すようにラックバスケット部材6を外側において把持することができる。
【0033】
第1形状部17は、把持アーム2に対して実質的に平行に延在する(スリット形状の)凹部であり、該凹部は(該凹部の底面において)把持アーム2の縦軸線(長手方向軸線)に対して斜めに延在している。図1が示しているように第1形状部17はラックハンガー部材5を把持するために用いられ、この際、ラックハンガー部材5の比較的短い横幅は、把持アーム2が互いに近づいていくことを必須とし、それにより把持アーム2は互いに斜めに位置することになる。しかし把持アーム2における第1形状部17の斜めの延在形式により、第1形状部17の底面が図1に図示されている把持ポジションにおいて互いに平行に延在し、ラックハンガー部材5が確実に固定保持可能であることがもたらされる。第1形状部17は第2形状部18とは別個に設けられており、このことは、第2形状部18がラックバスケット部材6を把持する場合に第1形状部17はその把持機能を担わないことを意味する。しかし、把持されたラックバスケット部材6の考えられるずれ落ちに関して確保機能を第1形状部17が施し、ラックバスケット部材6が下方へずれ落ちることを防止するように第1形状部17を形成することも可能である。
【0034】
位置センサ(例えば誘導型アナログセンサ)19が把持過程中にねじナット10のポジションを検知し、把持装置1の最適な制御を可能とする。
【0035】
尚、本発明の全開示(請求の範囲及び図面を含む)の枠内において、更にその基本的技術思想に基づき、実施形態ないし実施例の変更、調整が可能である。また、本発明の請求の範囲の枠内において、種々の開示要素(各請求項の各要素、各実施例の各要素、各図面の各要素等を含む)の多様な組み合わせないし選択が可能である。即ち本発明は、請求の範囲及び図面を含む全開示、技術的思想に従い、当業者であればなし得るであろう各種変形、修正を含むことは勿論である。
【符号の説明】
【0036】
1 把持装置
2 把持アーム
3 ラック
4 試料スライド
5 ラックハンガー部材
6 ラックバスケット部材(フレーム状部材)
7 把持部分
8 ステップモータ
9 ねじスピンドル
10 ねじナット
11 案内部分
12 円錐部分
13 球軸受け
14 回転点(枢支軸)
15 噛合セグメント
16 圧縮ばね(ばね要素)
17 第1形状部(第1プロフィール部)
18 第2形状部(第2プロフィール部)
19 誘導型アナログセンサ(センサ、位置センサ)
【技術分野】
【0001】
(関連出願の記載)
本出願は、2011年5月13日出願のドイツ特許出願第 10 2011 110 250.0 号の優先権主張に基づくものであり、同出願の全記載内容は引用をもって本明細書に組み込み記載されているものとする。
【0002】
本発明は、ラックを把持するための把持部分として端部が構成されている一対の把持アーム(Greifschenkel)を含んで構成される把持機構を備えた、試料スライド(試料支持体)用のラックを移送するための把持装置に関するものであり、特には組織学的な検査用の組織試料(組織検体 Gewebeproben)を準備するためのシステム内において、試料スライド用のラックを移送するための把持装置に関する。
【背景技術】
【0003】
特にこの種の装置は、顕微鏡を用いたその後の分析のために、試料スライド上の組織学的な切片のような染色処理されたプレパラート或いは組織試料に対してカバーガラスが取り付けられるシステムにおいて使用される。プレパラートの染色処理は自動染色装置(自動ステイニング装置 Faerbeautomat)において行われ、該自動染色装置内において、組織試料を有する試料スライドはラック或いは試料スライド保持器をもって仕分けされ、これらのラック或いは試料スライド保持器と共に染色容器内へ浸漬される。このプロセス中、試料スライドは、水平に配向されたラック内において垂直に相並んで配置されている。この際、中でもラックについては、ラックバスケット部材(ラック籠状部材)が旋回可能なハンガー部材に懸架されており該ハンガー部材を用いてラックを把持移送装置により把持して移送することのできるラックが使用される。このハンガー部材は、ラックから試料スライドが意図せずに逸脱してしまうことを防止する閉鎖機構としても機能する。染色処理後にラックは自動封入装置(自動カバースリッピング装置 Eindeckautomat)へ移行され、そこで封入プロセスが実行される。
【0004】
封入処理前に試料スライドは、通常、先ずは、封入処理時に使用される封入剤のより良い流れ特性(流動力学的性質)を保証するために、溶剤(キシレン)の入った搬入域キュベット(インプットキュベット)内に入れられる。引き続きラックは試料スライドと共に封入処理経路(Eindeckstrasse)へ移送され、そこで先ずは封入剤(接着剤又はそれに類似するもの)が試料スライド上へ塗布され、引き続き、組織試料を閉じ込めるためにカバーガラスが載置される。試料スライドから封入剤が流れ落ちることを防止するために、試料スライドは水平に配向されなくてはならない。そのために全ラックが旋回され、該旋回により試料スライドも同様に横転されて(90度傾回動されて)水平に配向される(所謂ラックプロセッシングという)。引き続きラックは、把持移送装置により封入処理経路へ運ばれ、封入プロセスが開始される。
【0005】
下記特許文献1から、ラックを自動染色装置から自動封入装置へ移動させ、該ラックを該自動封入装置内において降下される移送装置が公知である。自動封入装置においてラックは試料スライドと共に溶剤の入ったタンク内へ降下される。自動封入装置はラックを検知し、封入過程を開始する。全ての試料スライドが封入処理されて自動封入装置内の固有の搬出用ラック内へ収納された後に、空のラックが搬出される。移送装置は、ラック搭載ステーションの後壁と平行なレールから構成されており、該レールにおいてラック用の把持器が該レールに対して垂直及び平行に移動可能である。該把持具は、ラックのアングル部材と噛み合う溝部を有し、それによりラックは一側面においてのみ保持される。
【0006】
ラック内に配置された試料スライドを処理する(取り扱う)ための他の移送装置が下記特許文献2に記載されており、該移送装置は、ラックを処理ステーションへ供給するため或いはラックを処理ステーションから取り出すため、並びに後連結された装置へラックを転送するために用いられる。該移送装置は、端部側に把持器を備えたロボットアームとして構成されており、この際、該ロボットアームは複数の部分アームから構成され、垂直軸線に関して高さ調節可能且つ回転可能に配設されている。該移送装置は、ラックを把持し、該ラックを持ち上げ、該ラックを次の処理ステーションへ移送する。
【0007】
尚、先行技術文献として挙げられた下記特許文献の全開示内容は、これらの引用をもって本明細書に組み込み記載されているものとする。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】DE 101 44 041 A1
【特許文献2】DE 100 41 230 A1
【発明の概要】
【発明が解決しようとする課題】
【0009】
以下の分析は、本発明により与えられる。即ち上記特許文献1に示す移送装置では、ラックの移送の自由度が制限されている。また上記特許文献2に示す移送装置では、ロボットアームによりラックを高さ調節可能且つ回転可能に移送できるが、把持装置の機能は、ラックの持ち上げと更なる移送とに限られている。しかしラックプロセッシングのためにこの装置は適してなく、全ラックが旋回され且つその後に封入処理経路へ提供される自動封入装置において使用することはできない。その代わり、方向転換されたラックに対して特別に製作された補助的な把持装置が必要であろうが、このことは全システムをより高価でより複雑なものとする。
【0010】
本発明の課題は、自動染色装置及び自動封入装置において多岐にわたり使用可能であり、製造コストの軽減に寄与する、冒頭に掲げた形式の把持装置を創作することである。
【課題を解決するための手段】
【0011】
本発明の一視点によれば、ラックを把持するための把持部分として端部が構成されている一対の把持アームを含んで構成される把持機構を備えた、特には組織学的な検査用の組織試料を準備するためのシステム内において、試料スライド用のラックを移送するための把持装置が提供される。当該把持装置において、前記把持部分は、水平状態にあるラックを把持するための第1形状部と、垂直状態にあるラックを把持するための第2形状部を有する。
【発明の効果】
【0012】
本発明の上記一視点によれば、本発明の課題に対応する効果、即ち自動染色装置及び自動封入装置において多岐にわたり使用可能であり、製造コストの軽減に寄与する把持装置が提供される。
【発明を実施するための形態】
【0013】
本発明の一実施形態において、把持部分は別個の第1形状部(第1プロフィール部)と第2形状部(第2プロフィール部)とを有し、この際、第1形状部は、水平状態にあるラック(横置状態のラック:試料スライドは垂直状態にある)を把持するために構成され、第2形状部は、垂直状態にあるラック(縦置状態のラック:試料スライドは水平状態にある)を把持するために構成されている。このようにして、異なる複数の把持要素を備えた複数の移送装置の機能を、有利にも1つだけの把持装置を備えた1つの移送装置に組み込むことができる。この際、第1形状部は、全ラックが染色容器内へ浸漬される自動染色装置において頻繁に要求されるように、水平に配向されたラックが例えばそのラックハンガー部において把持され、移送することができるように構成されている。第2形状部は、垂直に配向されたラックを把持するために形成されており、それにより該ラックは、自動封入装置の特別な処理ステーションへ運ばれるか又はこれらの処理ステーション内へ挿入可能である。様々なポジションにおいてラックを把持する可能性により、自動染色装置内及び自動封入装置内の移送に関して極めて異なる要求に対応することができる。異なった構成の把持器を備えた多数の異なる移送システムの代わりに、唯一の移送装置を汎用的に使用することができる。つまり自動染色装置から来るラックを先ずは自動封入装置へ移送し、該自動封入装置の適切な箇所に降ろすことができる。それに続く封入プロセスのためにラックは、試料スライドを水平に配向させるために別個の旋回ユニットを用いて旋回することができる。そして同じ把持装置を用いてラックを封入処理経路へ供給することができる。本発明によるこの構成は、対応する自動装置の製造コストを多大に減少させる。
【0014】
以下、本発明の好ましい実施形態の概要について説明する。
【0015】
第1形状部がラックハンガー部材を把持するために構成されていると特に有利であると証明されている。このことは、高い移送確実性を可能とし、複数のラックを自動装置内へもたらす場合にこれらのラックの移送を容易化する。本発明の別の一実施形態では、第2形状部がラックバスケット部材を把持するために構成されており、この際、第2形状部は、目的に適い、ラックバスケット部材の外側形状部へ形状的にマッチされている。
【0016】
本発明の更に別の一実施形態では、把持アームが並進摺動可能な摺動要素と連結されており、従って把持アームが該摺動要素の並進運動により開閉される。このようにして把持装置を簡単な構造で小さくコンパクトに構成することができる。また小さい操作力を大きな把持力に変換することもできる。それに対応して駆動部のサイジングが小さくなる。
【0017】
本発明の思想の更なる構成では、摺動要素を、ねじスピンドル上にねじ込まれた(螺入された)円錐形状のねじナットとすることができ、この際、該ねじナットは把持装置において並進運動可能であるが回転運動不能に案内されており、従ってねじスピンドルの回転運動がねじナットの並進運動をもたらすことになる。周知の他の装置が大きな把持力のためにそれに対応して大きくサイジングされた電動式又は気体式の駆動部を必要とするのに対し、本発明に従う駆動機構は、僅かな費用と比較的小さい構成空間にもかかわらず大きな力を発生させることができる。
【0018】
好ましくは、摺動要素の摺動のために、電気式、気体式、又は液体式の駆動部が用いられる。つまり例えば、ねじスピンドルのために回転駆動部が使用される。それにより大きな把持力にもかかわらず小さい構成空間という要求に対応している。
【0019】
操作力をできるだけ小さく保つために、予張力の与えられた(プリテンションされた)ばね要素が把持アームを閉鎖ポジション又は開放ポジションにおいて保持することが考慮されている。そのようなばね要素としては、例えば、引張りばね、圧縮ばねなどが用いられ、従って費やすべき操作力は一方向にだけ作用させるようにすればよい。
【0020】
ねじスピンドルのねじピッチが、駆動力(Antriebskraft)と拡開力(Spreizkraft)との間の比率がほぼ0.2の値を有するように選択されていることが特に有利であると証明されている。
【0021】
ラックの把持と移送を特に確実にするために、本発明の別の一実施形態では、好ましくは誘導型アナログセンサであるセンサが、摺動要素又は把持アームのポジション検知のために設けられている。
【0022】
上記のごとく本発明において下記形態が可能である。下記各形態は、本願の特許請求の範囲(当初)の各請求項に記載した各々の構成要件に対応している。尚、本願の特許請求の範囲に付記されている図面参照符号は専ら本発明の理解の容易化のためのものであり、図示の形態への限定を意図するものではないことを付言する。
(形態1)上記一視点のとおり、ラックを把持するための把持部分として端部が構成されている一対の把持アームを含んで構成される把持機構を備えた、特には組織学的な検査用の組織試料を準備するためのシステム内において、試料スライド用のラックを移送するための把持装置であって、前記把持部分は、水平状態にあるラックを把持するための第1形状部と、垂直状態にあるラックを把持するための第2形状部を有すること。
(形態2)水平状態にあるラックを把持するための前記第1形状部は、ラックハンガー部材を把持するために構成されていることが好ましい。
(形態3)垂直状態にあるラックを把持するための前記第2形状部は、ラックバスケット部材を把持するために構成されていることが好ましい。
(形態4)前記把持アームは、並進摺動可能な摺動要素と連結されていること、及び、前記把持アームは、前記摺動要素の並進運動により開閉されることが好ましい。
(形態5)前記摺動要素は、ねじスピンドル上にねじ込まれた円錐形状のねじナットであり、該ねじナットは、当該把持装置において並進運動可能であるが回転運動不能に案内されており、従って前記ねじスピンドルの回転運動が前記ねじナットの並進運動をもたらすことが好ましい。
(形態6)前記摺動要素の摺動のために、電気式、気体式、又は液体式の駆動部が設けられていることが好ましい。
(形態7)予張力の与えられたばね要素が、前記把持アームを閉鎖ポジション又は開放ポジションにおいて保持することが好ましい。
(形態8)前記ねじスピンドルのねじピッチが、駆動力と拡開力との間の比率がほぼ0.2の値を有するように選択されていることが好ましい。
(形態9)好ましくは誘導型アナログセンサであるセンサが、前記摺動要素又は前記把持アームのポジション検知のために設けられていることが好ましい。
【0023】
以下、添付の図面に図示された本発明の具体的な実施例について詳細に説明する。この際、上述の全ての記載内容及び/又は図面に図示の記載内容は、本願の特許請求の範囲における各々の請求項の構成要件又はそれらの従属関係に依存せず、それ自体で又は任意の組み合わせをもって本発明の対象であることを付言する。
【0024】
本明細書に添付の図面の簡単な説明は、以下のとおりである。
【図面の簡単な説明】
【0025】
【図1】水平状態に配置されたラックを備えた、本発明による把持装置の一実施例を示す斜視図である。
【図2】図1に対応する図として、垂直状態に配置されたラックを備えた把持装置を示す斜視図である。
【図3】図1による把持装置の詳細を示す斜視図である。
【図4】図3に図示された把持装置を3箇所の異なる把持アームポジションにおいて示す俯瞰平面図である。
【図5】図3において(円で囲まれた)X部分を示す拡大詳細図である。
【実施例】
【0026】
図1に図示されている把持装置1は2つの把持アーム2を有し、該把持アーム2を用いて把持装置1は、試料スライド(試料支持体)4が垂直に相並んで挿入されているラック3を保持する。ラック3は、該ラック3のラックバスケット部材6が懸架されているラックハンガー部材5を有する。把持アーム2の前側端部は、ラックハンガー部材5を把持する把持部分7として構成されている。ラックハンガー部材5を用い、把持装置1が連結されている非図示の移送装置によりラック3が移送可能である。図1において水平に配向されたラック(横置状態のラック:試料スライドは垂直状態にある)の移送は、特には、ラックが自動染色装置(自動ステイニング装置 Faerbeautomat)内において移送される場合、又はラックが自動封入装置(自動カバースリッピング装置 Eindeckautomat)内において搬入域キュベット(インプットキュベット)内へ降下され、そして該搬入域キュベットから取り出される場合に行われるが、その理由は、ラック3内における試料スライド4の垂直の配向が組織試料における染色剤(Faerbemittel)の最適の排出を保証するためである。
【0027】
ところで封入プロセス前には、試料スライド4が水平に配向されるためにラック3が旋回(方向転換)されなくてはならない。図2に示されているように把持装置1は、旋回された状態のラック3(縦置状態のラック:試料スライドは水平状態にある)も把持することができる。この場合、把持部分7はラック3のラックバスケット部材(フレーム状部材)6を固定保持している。
【0028】
図3は把持装置1の詳細図を示している。把持装置1の駆動部としてステップモータ8が用いられ、該ステップモータ8には、非図示の外ねじ(雄ねじ)を備えたねじスピンドル9が連結されている。ねじスピンドル9の外ねじにマッチする円錐形状のねじナット10がねじスピンドル9上にねじ込まれている(螺入されている)。ねじナット10は、案内部分11において並進運動可能であるが、把持装置1において回転運動不能に案内されている。ステップモータ8を用いたねじスピンドル9の回転により、ねじナット10は、ねじスピンドル9とのねじ係合の結果、ねじスピンドル9に沿って並進方向において移動する。この際、回転方向に応じ、ねじナット10はステップモータ8から離れていく又はステップモータ8へ近付いていく。
【0029】
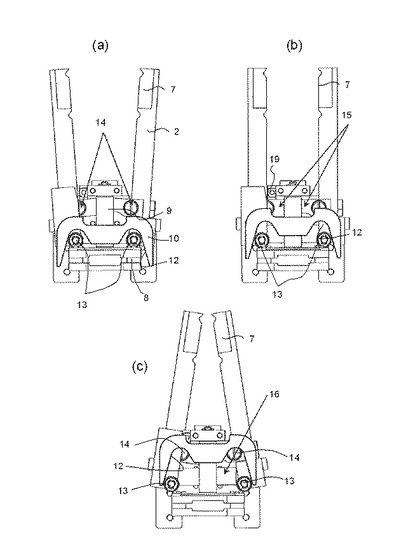
ねじナット10は、該ねじナット10の内側において円錐部分12を有し、該円錐部分12は把持部分7の方向へ先細りになっている。円錐部分12は、把持アーム2に取り付けられている2つの球軸受け(ボールベアリング)13と協働する。これらの球軸受け13は、各々、把持アーム2において(把持アーム2の長手方向で見て)把持部分7とは反対側に配設されている。図4(a)〜4(c)が示しているように把持アーム2は回転点(枢支軸)14の周りで旋回(回動)可能である。ねじナット10が摺動されると、円錐部分12が球軸受け13と協働する。即ち円錐部分12は、球軸受け13に対するカム面を成す。ねじナット10が後方へ、即ちステップモータ8の方向へ動くと、円錐部分12が球軸受け13を内側へ押し付け、それにより把持アーム2の後側部分が同様に内側へ押し寄せられる。この際、把持アーム2は回転点14の周りで旋回し、この旋回により、図4(a)で図示されているように把持アーム2の把持部分7が互いに離れていくように動かされる。
【0030】
図4(a)に示された位置は、ラックを把持する準備のできている開放ポジションにおいて把持装置1を示している。この際、ラックは水平(横置状態)又は垂直(縦置状態)に配向されていることが可能である。把持アーム2の非対称のねじれのねじれ防止部として、即ち把持アーム2の同期された動きのために噛合セグメント15が設けられている。
【0031】
把持装置1を閉じるには、ねじスピンドル9が(把持アーム2を開いた際のねじスピンドル9の回転方向とは)反対方向へ回転され、それによりねじナット10がねじスピンドル9に沿って前方へ、即ちステップモータ8から離れる方向へ動く。この動きが図4(b)と図4(c)に図示されている。この際、ねじナット10の円錐部分12は前方へ摺動され、それにより球軸受け13が再び外側へ動ける状態へ移動される。両方の把持アーム2の間には圧縮ばね16が配設されており、該圧縮ばね16が球軸受け13を備えた両方の把持アーム2の端部分を外側へ押し付ける。この際、回転点14を介してこの圧縮ばね16はレバーのように作用し、それにより把持部分7が互いの方向へ押し寄せられる。把持部分7とラック3との間に作用する垂直力(Normalkraefte)の印加は圧縮ばね16を介してのみ行われる。従ってステップモータ8とねじスピンドル9とねじナット10から構成される駆動機構は、主として、開放ポジションと閉鎖ポジションの位置調節のため、そして開放過程のための力の印加のために必要である。稼動時に必要な全エネルギー消費は、それに対応して低く保つことができる。ねじナット10は(てこのように)該ねじナット10が所定の倍率、一例として5倍の機械的倍率(力の変換比率 Uebersetzung)を可能とするように設計されており、このことは、駆動力(Antriebskraft)と拡開力(Spreizkraft)との間の比率(作用点(拡開力)に対する力点(駆動力)の比率)がほぼ0.2の値を有することを意味する。つまり閉鎖力が大きいにもかかわらず、把持器は小さい操作力を用いて開くことができる。
【0032】
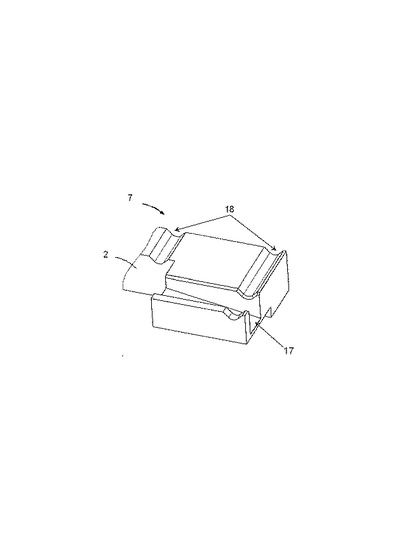
図5には、図3の(円で囲まれた)X部分から、把持アーム2において特殊形状形成された把持部分7が詳細図として示されている。把持アーム2の前側の把持部分7は、第1形状部(第1プロフィール部)17と第2形状部(第2プロフィール部)18とを有する。第2形状部18は、把持アーム2に対して実質的に左右方向(横方向)に延在し、窪み形状の2つの凹部から形成されている。この際、第2形状部18は、ラックバスケット部材(フレーム状部材)6の外側形状部へ形状的にマッチされ、図2が示すようにラックバスケット部材6を外側において把持することができる。
【0033】
第1形状部17は、把持アーム2に対して実質的に平行に延在する(スリット形状の)凹部であり、該凹部は(該凹部の底面において)把持アーム2の縦軸線(長手方向軸線)に対して斜めに延在している。図1が示しているように第1形状部17はラックハンガー部材5を把持するために用いられ、この際、ラックハンガー部材5の比較的短い横幅は、把持アーム2が互いに近づいていくことを必須とし、それにより把持アーム2は互いに斜めに位置することになる。しかし把持アーム2における第1形状部17の斜めの延在形式により、第1形状部17の底面が図1に図示されている把持ポジションにおいて互いに平行に延在し、ラックハンガー部材5が確実に固定保持可能であることがもたらされる。第1形状部17は第2形状部18とは別個に設けられており、このことは、第2形状部18がラックバスケット部材6を把持する場合に第1形状部17はその把持機能を担わないことを意味する。しかし、把持されたラックバスケット部材6の考えられるずれ落ちに関して確保機能を第1形状部17が施し、ラックバスケット部材6が下方へずれ落ちることを防止するように第1形状部17を形成することも可能である。
【0034】
位置センサ(例えば誘導型アナログセンサ)19が把持過程中にねじナット10のポジションを検知し、把持装置1の最適な制御を可能とする。
【0035】
尚、本発明の全開示(請求の範囲及び図面を含む)の枠内において、更にその基本的技術思想に基づき、実施形態ないし実施例の変更、調整が可能である。また、本発明の請求の範囲の枠内において、種々の開示要素(各請求項の各要素、各実施例の各要素、各図面の各要素等を含む)の多様な組み合わせないし選択が可能である。即ち本発明は、請求の範囲及び図面を含む全開示、技術的思想に従い、当業者であればなし得るであろう各種変形、修正を含むことは勿論である。
【符号の説明】
【0036】
1 把持装置
2 把持アーム
3 ラック
4 試料スライド
5 ラックハンガー部材
6 ラックバスケット部材(フレーム状部材)
7 把持部分
8 ステップモータ
9 ねじスピンドル
10 ねじナット
11 案内部分
12 円錐部分
13 球軸受け
14 回転点(枢支軸)
15 噛合セグメント
16 圧縮ばね(ばね要素)
17 第1形状部(第1プロフィール部)
18 第2形状部(第2プロフィール部)
19 誘導型アナログセンサ(センサ、位置センサ)
【特許請求の範囲】
【請求項1】
ラックを把持するための把持部分として端部が構成されている一対の把持アームを含んで構成される把持機構を備えた、試料スライド用のラックを移送するための把持装置であって、
前記把持部分(7)は、水平状態にあるラック(3)を把持するための第1形状部(17)と、垂直状態にあるラック(3)を把持するための第2形状部(18)を有すること
を特徴とする把持装置。
【請求項2】
水平状態にあるラック(3)を把持するための前記第1形状部(17)は、ラックハンガー部材(5)を把持するために構成されていること
を特徴とする、請求項1に記載の把持装置。
【請求項3】
垂直状態にあるラック(3)を把持するための前記第2形状部(18)は、ラックバスケット部材(6)を把持するために構成されていること
を特徴とする、請求項1に記載の把持装置。
【請求項4】
前記把持アーム(2)は、並進摺動可能な摺動要素と連結されていること、及び、前記把持アーム(2)は、前記摺動要素の並進運動により開閉されること
を特徴とする、請求項1に記載の把持装置。
【請求項5】
前記摺動要素は、ねじスピンドル(9)上にねじ込まれた円錐形状のねじナット(10)であり、該ねじナット(10)は、当該把持装置において並進運動可能であるが回転運動不能に案内されており、従って前記ねじスピンドル(9)の回転運動が前記ねじナット(10)の並進運動をもたらすこと
を特徴とする、請求項4に記載の把持装置。
【請求項6】
前記摺動要素の摺動のために、電気式、気体式、又は液体式の駆動部が設けられていること
を特徴とする、請求項4又は5に記載の把持装置。
【請求項7】
予張力の与えられたばね要素(16)が、前記把持アーム(2)を閉鎖ポジション又は開放ポジションにおいて保持すること
を特徴とする、請求項1〜6のいずれか一項に記載の把持装置。
【請求項8】
前記ねじスピンドル(9)のねじピッチが、駆動力と拡開力との間の比率がほぼ0.2の値を有するように選択されていること
を特徴とする、請求項5〜7のいずれか一項に記載の把持装置。
【請求項9】
センサ(19)が、前記摺動要素又は前記把持アーム(2)のポジション検知のために設けられていること
を特徴とする、請求項1〜8のいずれか一項に記載の把持装置。
【請求項1】
ラックを把持するための把持部分として端部が構成されている一対の把持アームを含んで構成される把持機構を備えた、試料スライド用のラックを移送するための把持装置であって、
前記把持部分(7)は、水平状態にあるラック(3)を把持するための第1形状部(17)と、垂直状態にあるラック(3)を把持するための第2形状部(18)を有すること
を特徴とする把持装置。
【請求項2】
水平状態にあるラック(3)を把持するための前記第1形状部(17)は、ラックハンガー部材(5)を把持するために構成されていること
を特徴とする、請求項1に記載の把持装置。
【請求項3】
垂直状態にあるラック(3)を把持するための前記第2形状部(18)は、ラックバスケット部材(6)を把持するために構成されていること
を特徴とする、請求項1に記載の把持装置。
【請求項4】
前記把持アーム(2)は、並進摺動可能な摺動要素と連結されていること、及び、前記把持アーム(2)は、前記摺動要素の並進運動により開閉されること
を特徴とする、請求項1に記載の把持装置。
【請求項5】
前記摺動要素は、ねじスピンドル(9)上にねじ込まれた円錐形状のねじナット(10)であり、該ねじナット(10)は、当該把持装置において並進運動可能であるが回転運動不能に案内されており、従って前記ねじスピンドル(9)の回転運動が前記ねじナット(10)の並進運動をもたらすこと
を特徴とする、請求項4に記載の把持装置。
【請求項6】
前記摺動要素の摺動のために、電気式、気体式、又は液体式の駆動部が設けられていること
を特徴とする、請求項4又は5に記載の把持装置。
【請求項7】
予張力の与えられたばね要素(16)が、前記把持アーム(2)を閉鎖ポジション又は開放ポジションにおいて保持すること
を特徴とする、請求項1〜6のいずれか一項に記載の把持装置。
【請求項8】
前記ねじスピンドル(9)のねじピッチが、駆動力と拡開力との間の比率がほぼ0.2の値を有するように選択されていること
を特徴とする、請求項5〜7のいずれか一項に記載の把持装置。
【請求項9】
センサ(19)が、前記摺動要素又は前記把持アーム(2)のポジション検知のために設けられていること
を特徴とする、請求項1〜8のいずれか一項に記載の把持装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−242386(P2012−242386A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2012−109980(P2012−109980)
【出願日】平成24年5月11日(2012.5.11)
【出願人】(500113648)ライカ ビオズュステムス ヌスロッホ ゲーエムベーハー (45)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成24年5月11日(2012.5.11)
【出願人】(500113648)ライカ ビオズュステムス ヌスロッホ ゲーエムベーハー (45)
【Fターム(参考)】
[ Back to top ]