
レゾルバの励磁回路
【目的】本発明は、アーク溶接ロボットなどの産業用ロボット等においてアーム等の回転軸の絶対的な回転位置を検出するために用いられるレゾルバの励磁回路に関し、レゾルバの利点を活かしながら、ケーブル長変化による特性変化を極力抑制できるようにすることを目的とする。
【構成】そこで、所定回転部に接続されて該所定回転部の有限角度範囲内での絶対回転角を検出するレゾルバ1を励磁すべく、出力部アンプ6a,7aと、この出力部アンプ6a,7aとレゾルバ1との間に直列に挿入されたアンプ用抵抗器6b,7bとを有してなるものにおいて、出力部アンプ6a,7aに対するフィードバック信号を、アンプ用抵抗器6b,7bの出力側からフィードバック用抵抗器6c,7cを介して採ることを特徴とする。
【構成】そこで、所定回転部に接続されて該所定回転部の有限角度範囲内での絶対回転角を検出するレゾルバ1を励磁すべく、出力部アンプ6a,7aと、この出力部アンプ6a,7aとレゾルバ1との間に直列に挿入されたアンプ用抵抗器6b,7bとを有してなるものにおいて、出力部アンプ6a,7aに対するフィードバック信号を、アンプ用抵抗器6b,7bの出力側からフィードバック用抵抗器6c,7cを介して採ることを特徴とする。
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明は、アーク溶接ロボットなどの産業用ロボット等においてアーム等の回転軸の絶対的な回転位置を検出するために用いられるレゾルバの励磁回路に関する。
【0002】
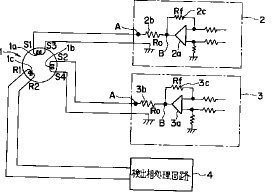
【従来の技術】図2は従来のレゾルバの励磁回路を示すもので、この図2において、1は図示しない所定回転部(回転軸等)に接続されてこの所定回転部の有限角度範囲(例えば180°または360°)内での絶対回転角を検出するレゾルバで、このレゾルバ1は、SIN相コイル1aと、COS相コイル1bと、検出相(R相)コイル1cとを有しており、SIN相コイル1aの両端S1,S3およびCOS相コイル1bの両端S2,S4は、それぞれSIN励磁回路2およびCOS励磁回路3に接続され各励磁回路2,3により励磁されるようになっている。
【0003】また、4は検出相コイル1cの両端R1,R2に接続されSIN相コイル1a,COS相コイル1bの励磁に伴って得られる検出相コイル1cからの絶対回転角信号を受けて波形処理を施す検出相処理回路である。
【0004】そして、SIN励磁回路2およびCOS励磁回路3は、図2に示すように、それぞれ、出力部アンプ2a,3aと、各出力部アンプ2a,3aとレゾルバ1のコイル1a,1bとの間に直列に挿入されたアンプ用抵抗器(Ro)2b,3bと、フィードバック用抵抗器(Rf)2c,3cとを有して構成されている。
【0005】ここで、アンプ用抵抗器2b,3bは、それぞれノイズ対策,出力部アンプ2a,3aの保護のために設けられている。また、従来、各出力部アンプ2a,3aに対するフィードバック信号は、それぞれ、出力部アンプ2a,3aと抵抗器2b,3bとの間のB点(出力部アンプ2a,3aの出力側)から、フィードバック用抵抗器2c,3cを介して採られている。
【0006】
【発明が解決しようとする課題】ところで、一般に、上述のようなレゾルバ1は、ACサーボモータの位置検出器,速度検出器,コミテートセンサとして用いられているが、ACサーボモータの位置検出器としては、パルスエンコーダも多く用いられている。
【0007】しかし、レゾルバ1は、パルスエンコーダに比べて機械的にも熱的にも強い利点があるが、サインカーブというアナログ信号を用いるため、レゾルバ1と各励磁回路2,3との間のケーブル長により信号の遅れがあり、性能が変化してしまう。
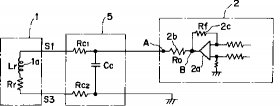
【0008】つまり、図3は、図2におけるレゾルバ1のSIN相コイル1aおよびその接続ケーブル5についての等価回路を示すもので、図3に示すように、接続ケーブル5の抵抗Rc1,Rc2および電気容量Ccと、レゾルバ1の抵抗RrおよびインダクタンスLrとにより、アンプ用抵抗器2b(3b)の両端A,B間には、位相差が生じる。
【0009】この位相差はドライバの励磁,検出回路内で補正可能であり問題ないが、接続ケーブル5の長さが変化する場合、その抵抗Rc1,Rc2および電気容量Ccも変化するため、アンプ用抵抗器2b(3b)の両端A,B間に生じる位相差にも変化を生じる。従って、接続ケーブル5の長さを変える都度、再調整を行なう必要があった。
【0010】また、再調整を行なわない場合には、少しずつでも性能が変化し、ケーブル長が大きく変わると、発振気味になったり効率が大きく低下したりしてモータの発熱が増すなどの課題もあった。
【0011】本発明は、このような課題を解決しようとするもので、レゾルバの利点を活かしながら、ケーブル長変化による特性変化を極力抑制できるようにしたレゾルバの励磁回路を提供することを目的とする。
【0012】
【課題を解決するための手段】上記目的を達成するために、本発明のレゾルバの励磁回路は、所定回転部に接続されて該所定回転部の有限角度範囲内での絶対回転角を検出するレゾルバを励磁すべく、出力部アンプと、該出力部アンプと前記レゾルバとの間に直列に挿入されたアンプ用抵抗器とを有してなるものにおいて、前記出力部アンプに対するフィードバック信号を、前記アンプ用抵抗器の出力側からフィードバック用抵抗器を介して採ることを特徴としている。
【0013】
【作用】上述した本発明のレゾルバの励磁回路では、出力部アンプに対するフィードバック信号が、アンプ用抵抗器の出力側からフィードバック用抵抗器を介して採られるため、従来のようなアンプ用抵抗器両端の位相差による影響を排除することができる。
【0014】
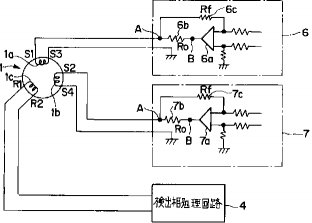
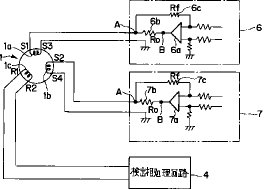
【実施例】以下、図面により本発明の一実施例としてのレゾルバの励磁回路について説明すると、図1はその回路図である。なお、図1中、既述の符号と同一の符号は同一部分を示しているので、その詳細な説明は省略する。
【0015】図1に示すように、本実施例のレゾルバ1のコイル1a,1bは、それぞれ、SIN励磁回路5およびCOS励磁回路6に接続され各励磁回路5,6により励磁されるとともに、その励磁に伴って得られる検出相コイル1cからの絶対回転角信号は、検出相処理回路4により波形処理を施されるようになっている。
【0016】本実施例のSIN励磁回路5およびCOS励磁回路6も、従来と同様に、それぞれ、出力部アンプ6a,7aと、各出力部アンプ6a,7aとレゾルバ1のコイル1a,1bとの間に直列に挿入されたアンプ用抵抗器(Ro)6b,7bと、フィードバック用抵抗器(Rf)6c,7cとを有して構成されている。また、従来と同様に、アンプ用抵抗器6b,7bは、それぞれノイズ対策,出力部アンプ6a,7aの保護のために設けられている。
【0017】そして、本実施例の各励磁回路6,7において、出力部アンプ6a,7aに対するフィードバック信号は、それぞれ、アンプ用抵抗器6b,7bの出力側A点からフィードバック用抵抗器6c,7cを介して採られている。
【0018】上述の構成により、従来、SIN相,COS相を出力している出力部アンプ2a,3aの出力側B点からフィードバック信号を採っていたのに対して、本実施例では、出力部アンプ6a,7aに対するフィードバック信号を、アンプ用抵抗器6b,7bの出力側A点から採ることで、各アンプ用抵抗器6b,7b両端の位相差による影響を排除することができ、A点でほぼ目的通りのSIN(COS)カーブが得られる。
【0019】このとき、アンプ用抵抗器6b,7bによるノイズ対策,出力部アンプ2a,3aの保護の機能は従来と同様に得られる。
【0020】また、レゾルバ1に印加されるまで、接続ケーブルの抵抗Rc1,Rc2および電気容量Ccの影響を受け若干変化するが、アンプ用抵抗器6b,7bがフィードバック点よりも後にある場合(従来回路)に比べて、その影響は大きく減少する。
【0021】このように、本実施例の励磁回路によれば、レゾルバ1の利点を活かしながら、ケーブル長変化による特性変化を極力抑制できるのである。
【0022】
【発明の効果】以上詳述したように、本発明のレゾルバの励磁回路によれば、出力部アンプに対するフィードバック信号を、アンプ用抵抗器の出力側からフィードバック用抵抗器を介して採るように構成したので、レゾルバの利点を活かしながら、ケーブル長変化による特性変化を極力抑制できる効果がある。
【図面の簡単な説明】
【図1】本発明の一実施例としてのレゾルバの励磁回路を示す回路図である。
【図2】従来のレゾルバの励磁回路を示す回路図である。
【図3】従来のレゾルバの励磁回路の回路図とともにレゾルバの等価回路を示す回路図である。
【符号の説明】
1 レゾルバ
1a SIN相コイル
1b COS相コイル
1c 検出相コイル
4 検出相処理回路
6 SIN励磁回路
6a 出力部アンプ
6b アンプ用抵抗器
6c フィードバック用抵抗器
7 COS励磁回路
7a 出力部アンプ
7b アンプ用抵抗器
7c フィードバック用抵抗器
【0001】
【産業上の利用分野】本発明は、アーク溶接ロボットなどの産業用ロボット等においてアーム等の回転軸の絶対的な回転位置を検出するために用いられるレゾルバの励磁回路に関する。
【0002】
【従来の技術】図2は従来のレゾルバの励磁回路を示すもので、この図2において、1は図示しない所定回転部(回転軸等)に接続されてこの所定回転部の有限角度範囲(例えば180°または360°)内での絶対回転角を検出するレゾルバで、このレゾルバ1は、SIN相コイル1aと、COS相コイル1bと、検出相(R相)コイル1cとを有しており、SIN相コイル1aの両端S1,S3およびCOS相コイル1bの両端S2,S4は、それぞれSIN励磁回路2およびCOS励磁回路3に接続され各励磁回路2,3により励磁されるようになっている。
【0003】また、4は検出相コイル1cの両端R1,R2に接続されSIN相コイル1a,COS相コイル1bの励磁に伴って得られる検出相コイル1cからの絶対回転角信号を受けて波形処理を施す検出相処理回路である。
【0004】そして、SIN励磁回路2およびCOS励磁回路3は、図2に示すように、それぞれ、出力部アンプ2a,3aと、各出力部アンプ2a,3aとレゾルバ1のコイル1a,1bとの間に直列に挿入されたアンプ用抵抗器(Ro)2b,3bと、フィードバック用抵抗器(Rf)2c,3cとを有して構成されている。
【0005】ここで、アンプ用抵抗器2b,3bは、それぞれノイズ対策,出力部アンプ2a,3aの保護のために設けられている。また、従来、各出力部アンプ2a,3aに対するフィードバック信号は、それぞれ、出力部アンプ2a,3aと抵抗器2b,3bとの間のB点(出力部アンプ2a,3aの出力側)から、フィードバック用抵抗器2c,3cを介して採られている。
【0006】
【発明が解決しようとする課題】ところで、一般に、上述のようなレゾルバ1は、ACサーボモータの位置検出器,速度検出器,コミテートセンサとして用いられているが、ACサーボモータの位置検出器としては、パルスエンコーダも多く用いられている。
【0007】しかし、レゾルバ1は、パルスエンコーダに比べて機械的にも熱的にも強い利点があるが、サインカーブというアナログ信号を用いるため、レゾルバ1と各励磁回路2,3との間のケーブル長により信号の遅れがあり、性能が変化してしまう。
【0008】つまり、図3は、図2におけるレゾルバ1のSIN相コイル1aおよびその接続ケーブル5についての等価回路を示すもので、図3に示すように、接続ケーブル5の抵抗Rc1,Rc2および電気容量Ccと、レゾルバ1の抵抗RrおよびインダクタンスLrとにより、アンプ用抵抗器2b(3b)の両端A,B間には、位相差が生じる。
【0009】この位相差はドライバの励磁,検出回路内で補正可能であり問題ないが、接続ケーブル5の長さが変化する場合、その抵抗Rc1,Rc2および電気容量Ccも変化するため、アンプ用抵抗器2b(3b)の両端A,B間に生じる位相差にも変化を生じる。従って、接続ケーブル5の長さを変える都度、再調整を行なう必要があった。
【0010】また、再調整を行なわない場合には、少しずつでも性能が変化し、ケーブル長が大きく変わると、発振気味になったり効率が大きく低下したりしてモータの発熱が増すなどの課題もあった。
【0011】本発明は、このような課題を解決しようとするもので、レゾルバの利点を活かしながら、ケーブル長変化による特性変化を極力抑制できるようにしたレゾルバの励磁回路を提供することを目的とする。
【0012】
【課題を解決するための手段】上記目的を達成するために、本発明のレゾルバの励磁回路は、所定回転部に接続されて該所定回転部の有限角度範囲内での絶対回転角を検出するレゾルバを励磁すべく、出力部アンプと、該出力部アンプと前記レゾルバとの間に直列に挿入されたアンプ用抵抗器とを有してなるものにおいて、前記出力部アンプに対するフィードバック信号を、前記アンプ用抵抗器の出力側からフィードバック用抵抗器を介して採ることを特徴としている。
【0013】
【作用】上述した本発明のレゾルバの励磁回路では、出力部アンプに対するフィードバック信号が、アンプ用抵抗器の出力側からフィードバック用抵抗器を介して採られるため、従来のようなアンプ用抵抗器両端の位相差による影響を排除することができる。
【0014】
【実施例】以下、図面により本発明の一実施例としてのレゾルバの励磁回路について説明すると、図1はその回路図である。なお、図1中、既述の符号と同一の符号は同一部分を示しているので、その詳細な説明は省略する。
【0015】図1に示すように、本実施例のレゾルバ1のコイル1a,1bは、それぞれ、SIN励磁回路5およびCOS励磁回路6に接続され各励磁回路5,6により励磁されるとともに、その励磁に伴って得られる検出相コイル1cからの絶対回転角信号は、検出相処理回路4により波形処理を施されるようになっている。
【0016】本実施例のSIN励磁回路5およびCOS励磁回路6も、従来と同様に、それぞれ、出力部アンプ6a,7aと、各出力部アンプ6a,7aとレゾルバ1のコイル1a,1bとの間に直列に挿入されたアンプ用抵抗器(Ro)6b,7bと、フィードバック用抵抗器(Rf)6c,7cとを有して構成されている。また、従来と同様に、アンプ用抵抗器6b,7bは、それぞれノイズ対策,出力部アンプ6a,7aの保護のために設けられている。
【0017】そして、本実施例の各励磁回路6,7において、出力部アンプ6a,7aに対するフィードバック信号は、それぞれ、アンプ用抵抗器6b,7bの出力側A点からフィードバック用抵抗器6c,7cを介して採られている。
【0018】上述の構成により、従来、SIN相,COS相を出力している出力部アンプ2a,3aの出力側B点からフィードバック信号を採っていたのに対して、本実施例では、出力部アンプ6a,7aに対するフィードバック信号を、アンプ用抵抗器6b,7bの出力側A点から採ることで、各アンプ用抵抗器6b,7b両端の位相差による影響を排除することができ、A点でほぼ目的通りのSIN(COS)カーブが得られる。
【0019】このとき、アンプ用抵抗器6b,7bによるノイズ対策,出力部アンプ2a,3aの保護の機能は従来と同様に得られる。
【0020】また、レゾルバ1に印加されるまで、接続ケーブルの抵抗Rc1,Rc2および電気容量Ccの影響を受け若干変化するが、アンプ用抵抗器6b,7bがフィードバック点よりも後にある場合(従来回路)に比べて、その影響は大きく減少する。
【0021】このように、本実施例の励磁回路によれば、レゾルバ1の利点を活かしながら、ケーブル長変化による特性変化を極力抑制できるのである。
【0022】
【発明の効果】以上詳述したように、本発明のレゾルバの励磁回路によれば、出力部アンプに対するフィードバック信号を、アンプ用抵抗器の出力側からフィードバック用抵抗器を介して採るように構成したので、レゾルバの利点を活かしながら、ケーブル長変化による特性変化を極力抑制できる効果がある。
【図面の簡単な説明】
【図1】本発明の一実施例としてのレゾルバの励磁回路を示す回路図である。
【図2】従来のレゾルバの励磁回路を示す回路図である。
【図3】従来のレゾルバの励磁回路の回路図とともにレゾルバの等価回路を示す回路図である。
【符号の説明】
1 レゾルバ
1a SIN相コイル
1b COS相コイル
1c 検出相コイル
4 検出相処理回路
6 SIN励磁回路
6a 出力部アンプ
6b アンプ用抵抗器
6c フィードバック用抵抗器
7 COS励磁回路
7a 出力部アンプ
7b アンプ用抵抗器
7c フィードバック用抵抗器
【特許請求の範囲】
【請求項1】 所定回転部に接続されて該所定回転部の有限角度範囲内での絶対回転角を検出するレゾルバを励磁すべく、出力部アンプと、該出力部アンプと前記レゾルバとの間に直列に挿入されたアンプ用抵抗器とを有してなるレゾルバの励磁回路において、前記出力部アンプに対するフィードバック信号を、前記アンプ用抵抗器の出力側からフィードバック用抵抗器を介して採ることを特徴とするレゾルバの励磁回路。
【請求項1】 所定回転部に接続されて該所定回転部の有限角度範囲内での絶対回転角を検出するレゾルバを励磁すべく、出力部アンプと、該出力部アンプと前記レゾルバとの間に直列に挿入されたアンプ用抵抗器とを有してなるレゾルバの励磁回路において、前記出力部アンプに対するフィードバック信号を、前記アンプ用抵抗器の出力側からフィードバック用抵抗器を介して採ることを特徴とするレゾルバの励磁回路。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開平6−11359
【公開日】平成6年(1994)1月21日
【国際特許分類】
【出願番号】特願平4−169238
【出願日】平成4年(1992)6月26日
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
【公開日】平成6年(1994)1月21日
【国際特許分類】
【出願日】平成4年(1992)6月26日
【出願人】(000001199)株式会社神戸製鋼所 (5,860)
[ Back to top ]