
レーダ装置、目標同化判定処理方法およびプログラム
【課題】非同期に走査を行う1次レーダおよび2次レーダにおいて捕捉した目標の同化判定処理を容易に行うこと。
【解決手段】1次レーダ10と、この1次レーダ10と走査速度が非同期の2次レーダ11とを備えるレーダ装置1において、1次レーダ10が捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダ10が目標Tを捕捉していない期間における目標Tの位置を推定する航跡追尾部12と、2次レーダ11が目標tを捕捉した時刻に対応する航跡追尾部12が推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと航跡追尾部12が位置を推定する基となった目標Tとが同一のものであると判定する目標同化判定部としてのデータ処理部13とを備える。
【解決手段】1次レーダ10と、この1次レーダ10と走査速度が非同期の2次レーダ11とを備えるレーダ装置1において、1次レーダ10が捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダ10が目標Tを捕捉していない期間における目標Tの位置を推定する航跡追尾部12と、2次レーダ11が目標tを捕捉した時刻に対応する航跡追尾部12が推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと航跡追尾部12が位置を推定する基となった目標Tとが同一のものであると判定する目標同化判定部としてのデータ処理部13とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置、目標同化判定処理方法およびプログラムに関する。
【背景技術】
【0002】
航空管制に使用される航空機監視用レーダは、1次レーダ(PSR:Primary Surveillance Radar)と2次レーダ(SSR:Secondary Surveillance Radar)とに大別される。1次レーダ(PSR)は、地上から電波を発し、これの反射波を受信処理することにより航空機の位置情報を取得するものである。一方、2次レーダ(SSR)は、航空機に搭載されたトランスポンダに質問信号を送信し、これに対する応答信号を受信することにより航空機に関する各種情報を得るものである。
【0003】
このように、1次レーダと2次レーダとを装備するレーダ装置では、1次レーダと2次レーダとは同期して走査するのが一般的である。これに対し、特許文献1に記載のレーダ装置は、目標の早期検出の要求を満たすため、1次レーダと2次レーダとが非同期で走査を行っている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−128442号公報(第「0011」段落など)
【発明の概要】
【発明が解決しようとする課題】
【0005】
1次レーダと2次レーダとを装備するレーダ装置では、1次レーダによる目標の位置情報と2次レーダによる目標の位置情報とに差異を有する場合がある。たとえば1次レーダと2次レーダとが同期して走査している場合であっても、2次レーダが取得する位置情報は、目標となる航空機などからの応答信号によって目標から通知された位置情報であり、この目標が有する位置測定精度に依存する。一方、1次レーダが取得する位置情報は、1次レーダ自らが取得した位置情報であり、この1次レーダが有する位置測定精度に依存する。このように異なる位置測定精度による2つの位置情報をそれぞれ取得するため1次レーダによる目標の位置情報と2次レーダによる目標の位置情報とに差異を生じる。
【0006】
また、特許文献1に記載のレーダ装置のように、1次レーダと2次レーダとが非同期で走査している場合、1次レーダが目標を捕捉する時刻と2次レーダが目標を捕捉する時刻とが離れている。このため、1次レーダが取得した目標の位置情報と2次レーダが取得した目標の位置情報とは大きな差異を生じる。
【0007】
このように1次レーダと2次レーダとを装備するレーダ装置では、1次レーダが取得した目標の位置情報と2次レーダが取得した目標の位置情報とに差異があるため、当該目標が同一の目標であるか否かを判定する処理が必要になる。以下では、この処理を同化判定処理と呼ぶことにする。
【0008】
この同化判定処理は、1次レーダと2次レーダとが同期して走査しているレーダ装置の場合、1次レーダが取得した目標の位置情報と2次レーダが取得した目標の位置情報との差異は小さく比較的容易に正確な同化判定が可能である。一方、同化判定処理は、1次レーダと2次レーダとが非同期で走査しているレーダ装置の場合、1次レーダが取得した目標の位置情報と2次レーダが取得した目標の位置情報との差異は大きく正確な同化判定は難しい。
【0009】
本発明は、このような背景の下に行われたものであって、非同期に走査を行う1次レーダおよび2次レーダにおいて捕捉した目標の同化判定処理を正確に行うことができるレーダ装置、目標同化判定処理方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の第一の観点は、レーダ装置としての観点である。すなわち、本発明のレーダ装置は、1次レーダと、この1次レーダと走査速度が非同期の2次レーダとを備えるレーダ装置において、1次レーダが捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダが目標Tを捕捉していない期間における目標Tの位置を推定する航跡追尾部と、2次レーダが目標tを捕捉した時刻に対応する航跡追尾部が推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと航跡追尾部が位置を推定する基となった目標Tとが同一のものであると判定する目標同化判定部と、を備えるものである。
【0011】
本発明の第二の観点は、目標同化判定処理方法としての観点である。すなわち、本発明の目標同化判定処理方法は、1次レーダと、この1次レーダと走査速度が非同期の2次レーダとを備えるレーダ装置が行う目標同化判定処理方法において、レーダ装置の航跡追尾部が、1次レーダが捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダが目標Tを捕捉していない期間における目標Tの位置を推定する航跡追尾ステップを実行し、レーダ装置の目標同化判定部が、2次レーダが目標tを捕捉した時刻に対応する航跡追尾部が推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと航跡追尾部が位置を推定する基となった目標Tとが同一のものであると判定する目標同化判定ステップを実行するものである。
【0012】
本発明の第三の観点は、プログラムである。すなわち、本発明のプログラムは、情報処理装置にインストールすることにより、その情報処理装置に、本発明のレーダ装置の機能を実現するものである。
【発明の効果】
【0013】
本発明によれば、非同期に走査を行う1次レーダおよび2次レーダにおいて捕捉した目標の同化判定処理を正確に行うことができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態に係るレーダ装置の全体構成図である。
【図2】図1に示す1次レーダおよび2次レーダのビーム方向を説明するための図である。
【図3】図1に示す1次レーダおよび2次レーダが目標を捕捉する様子を示す図であり、1次レーダの一方のビームが目標を捕捉する図である。
【図4】図1に示す1次レーダおよび2次レーダが目標を捕捉する様子を示す図であり、1次レーダの他方のビームが目標を捕捉する図である。
【図5】図1に示す1次レーダおよび2次レーダが目標を捕捉する様子を示す図であり、2次レーダのビームが目標を捕捉する図である。
【図6】図1に示す1次レーダおよび2次レーダが目標を捕捉する様子を示す図であり、1次レーダの一方のビームが目標を捕捉する図である。
【図7】図1に示す1次レーダおよび2次レーダが目標を捕捉する様子を示す図であり、2次レーダのビームが目標を捕捉する図である。
【図8】図1に示す1次レーダおよび2次レーダが目標を捕捉する様子を示す図であり、1次レーダの他方のビームが目標を捕捉する図である。
【図9】図1に示す1次レーダおよび2次レーダが目標を捕捉するタイミングを示す図である。
【図10】図1に示す1次レーダにおける実測点と図1に示す航跡追尾部における推定点とを説明するための図である。
【図11】図10に示す実測点と推定点における目標の位置の推定の様子を説明するための図である。
【図12】図1に示すデータ処理部が設定するゲートを説明するための図である。
【図13】図12に示すゲートに図11に示す推定点における目標の位置を重ね合わせた様子を示す図である。
【図14】図12に示すゲートにおける同化判定のパターンを示す図であり、最も同化精度の高い状態を示す図である。
【図15】図12に示すゲートにおける同化判定のパターンを示す図であり、最も同化精度の低い状態を示す図である。
【図16】図12に示すゲートにおける同化判定のパターンを示す図であり、同化判定を行わない状態を示す図である。
【図17】図12に示すゲートにおける同化判定のパターンを示す図であり、同化判定を行わない状態を示す図である。
【図18】図10に示す実測点に欠落が発生した状態を示す図である。
【図19】図1に示すデータ処理部の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0015】
(本発明の実施の形態に係るレーダ装置1の構成について)
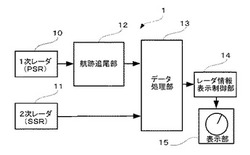
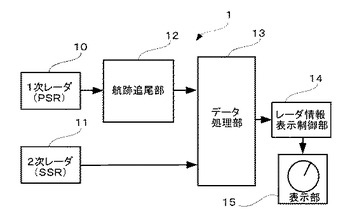
本発明の実施の形態に係るレーダ装置1の構成について図1を参照して説明する。図1は、レーダ装置1の全体構成図である。レーダ装置1は、1次レーダ(PSR)10、2次レーダ(SSR)11、航跡追尾部12、データ処理部13、レーダ情報表示制御部14、表示部15により構成される。
【0016】
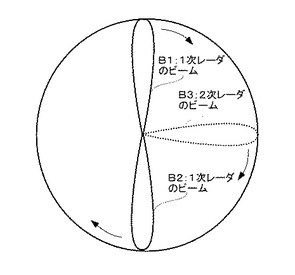
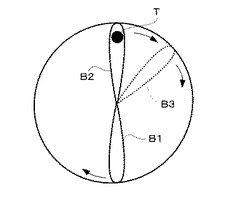
1次レーダ10は、地上から電波を発し、これの反射波を受信処理することにより航空機の位置情報を取得する。2次レーダ11は、航空機に搭載されたトランスポンダに質問信号を送信し、これに対する応答信号を受信することにより航空機に関する各種情報を得る。図2に、1次レーダ10のビームB1、B2および2次レーダ11のビームB3を示す。
【0017】
1次レーダ10は、ヒット数を増加させる観点から、常時は図2に示すように、互いに180度異なる2方向へビームB1、B2を形成して全方位を走査する。一方、2次レーダ11は、航空機との通信を行うのであるから、一方向へビームB3を形成して全方向を走査する。このように、1次レーダ10と2次レーダ11とは非同期で走査している。図2の例では、1次レーダ10のビーム方向に対して2次レーダ11のビーム方向が直交している。これは図示を分り易くするためであり、1次レーダ10と2次レーダ11の走査速度が異なれば1次レーダ10のビーム方向に対する2次レーダ11のビーム方向は時々刻々変化することになる。
【0018】
航跡追尾部12は、1次レーダ10が実際に目標Tを捕捉したときの位置情報を入力し、目標Tを捕捉した位置における移動速度および移動方向に基づき1次レーダ10がこの目標Tを捕捉していない期間における目標Tの位置を推定してデータ処理部13に出力する。
【0019】
データ処理部13は、航跡追尾部12から出力される目標Tの推定位置情報と2次レーダ11から出力される目標tの位置情報とを入力し、目標Tと目標tの同化判定処理を実施する。
【0020】
レーダ情報表示制御部14は、データ処理部13によって同化判定処理された目標を表示部15に表示する処理を行う。
【0021】
表示部15は、レーダ情報表示制御部14の出力をオペレータが視認できる形式で表示する。
【0022】
(レーダ装置1の動作について)
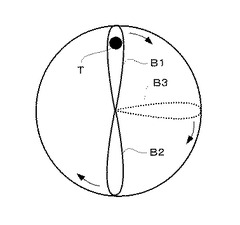
次に、レーダ装置1の動作について説明する。図3〜図8は、1つの飛行物体を1次レーダ10、2次レーダ11がそれぞれ目標T、目標tとして捕捉する様子を示す図である。なお、図3〜図8では、説明を分り易くするために、目標T、目標tとなる飛行物体は移動していないものとして説明する。たとえばこの飛行物体は上空の定点で移動せずにホバリングするヘリコプタである。
【0023】
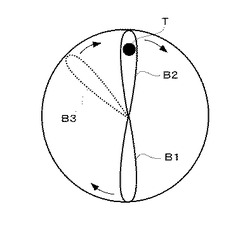
図3では、1次レーダ10のビームB1が目標Tを捕捉している。また、図3では、1次レーダ10の両方のビームB1、B2の方向に対して2次レーダ11のビームB3が直交している。
【0024】
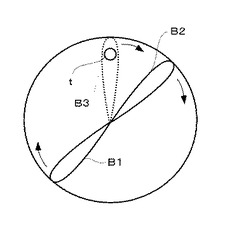
図4では、1次レーダ10のビームB2が目標Tを捕捉している。図4では、1次レーダ10のビームB1、B2が図3の状態から180度進み、2次レーダ11のビームB3が1次レーダ10のビームB2に近づいている。これにより、1次レーダ10の走査速度よりも2次レーダ11の走査速度の方が速いことがわかる。
【0025】
図5では、2次レーダ11のビームB3が目標tを捕捉している。
【0026】
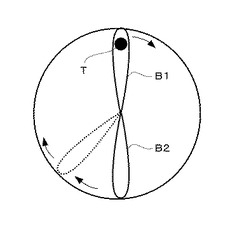
図6では、1次レーダ10のビームB1が目標Tを捕捉している。図6では、1次レーダ10の走査が1周して図3の状態に戻っている。さらに、図6では、2次レーダ11のビームB3が1次レーダ10のビームB2を追い越している。
【0027】
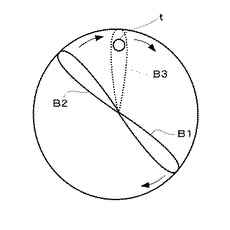
図7では、図6において1次レーダ10のビームB2を追い越した2次レーダ11のビームB3が目標tを捕捉している。
【0028】
図8では、図6において2次レーダ11のビームB3に追い越された1次レーダ10のビームB2が目標Tを捕捉している。
【0029】
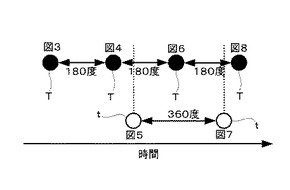
1次レーダ10および2次レーダ11における図3〜図8に示した目標T、目標tの捕捉タイミングを図9に示す。図9の黒丸は1次レーダ10による目標Tの捕捉タイミングである。図9の白丸は2次レーダ11による目標tの捕捉タイミングである。また、図9では黒丸、白丸にそれぞれ対応する図番を付してある。
【0030】
図9からわかるように、1次レーダ10が目標Tを捕捉するタイミングは180度毎に一回である。これに対し、2次レーダ11が目標tを捕捉するタイミングは、360度毎に一回である。また、1次レーダ10の走査速度と2次レーダ11の走査速度が異なるため、1次レーダ10が目標Tを捕捉するタイミングに対する2次レーダ11が目標tを捕捉するタイミングの関係は一定ではない。
【0031】
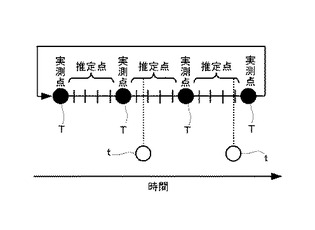
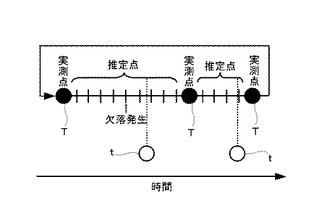
レーダ装置1の航跡追尾部12は、図9に示す1次レーダ10の目標Tの検出タイミングの合間における目標Tの位置を推定する。すなわち、図10に示すように、実測点の合間に推定点を設け、この推定点における目標Tの位置を推定する。
【0032】
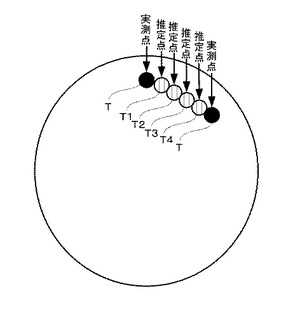
航跡追尾部12が行う目標Tの位置の推定方法については、既知の様々な推定方法が適用できるものとする。その1例を挙げると、たとえば実測点における目標Tの実際の位置における移動方向および移動速度の各情報に基づき目標Tが実測点における位置からそのままの移動方向にそのままの移動速度で移動したと仮定した場合の位置を推定する。このような推定処理を追尾平滑化処理という。このようにして推定された目標Tの推定位置を図11に示す。なお、目標T1〜T4は、推定位置に対応して架空に表示されている図形である。
【0033】
なお、図3〜図8の説明では、説明を分り易くするために、目標T、目標tとなる飛行物体は移動していないものとして説明したが、図11では、目標Tは南東方向に移動するものとする。よって、図11に示すように、航跡追尾部12は、実測点と実測点との間に4つの推定点における目標Tの位置を目標T1〜T4として推定する。
【0034】
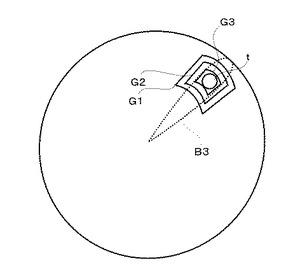
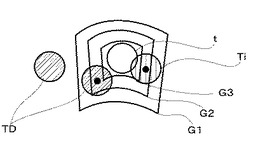
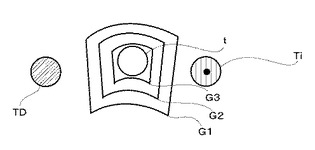
また、データ処理部13は、図12に示すように、2次レーダ11のビームB3により捕捉した目標tの位置を中心として、距離方向と方位方向の3段階の大きさでゲートG1〜G3を設定する。ゲートG3は、目標tの位置からの距離が最も短いゲートである。また、ゲートG1は、目標tの位置からの距離が最も長いゲートである。また、ゲートG2は、ゲートG1とゲートG3との中間に位置するゲートである。
【0035】
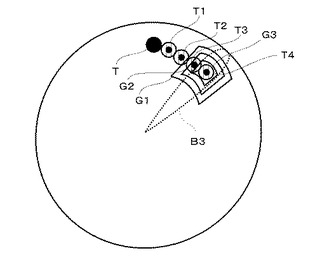
続いて、データ処理部13は、図13に示すように、図11で説明した目標Tに対する推定位置にある架空の目標T1〜T4をゲートG1〜G3に重ね合わせてみる。その結果、目標T4の中心(黒点として図示)がゲートG3内に入る。また、目標T3の中心についてもゲートG2内に入る。よって、データ処理部13は、目標T3、T4の位置を推定する基となった1次レーダ10の目標Tが2次レーダ11の目標tと同一であると判定する。以下ではこのような判定を同化判定と呼ぶことにする。これにより、データ処理部13によって、目標Tと目標tとは同化判定処理される。なお、図13の例では、目標T1〜T4が円形であるため中心を特定することは容易であるが、目標T1〜T4が複雑な形である場合には、その重心位置などを中心とするなどの一定のルールを設ければよい。
【0036】
また、データ処理部13は、同化判定の際に、いずれのゲートG1〜G3で同化判定されたかを同化精度情報として記録してもよい。また、データ処理部13は、このような同化精度情報をレーダ装置1の表示画面上に表示してもよい。たとえばレーダ情報表示制御部14は、表示部15の表示画面上に目標を表示する際に、精度情報毎に目標を色分けするなどしてオペレータが同化精度情報を視認できるようにしてもよい。
【0037】
すなわち、2次レーダ11の目標tに最も近いゲートG3内に目標Ti(iは1〜4のいずれか)の中心が入って同化判定された場合には「同化精度情報=高」とし、目標Tiの中心がゲートG3内には入らずゲートG2内に入って同化判定された場合には「同化精度情報=中」とし、目標Tiの中心がゲートG2、G3内には入らずゲートG1内のみに入って同化判定された場合には「同化精度情報=低」などとする。
【0038】
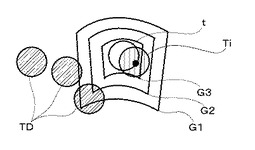
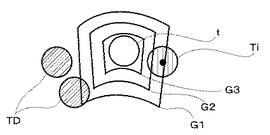
次に、ゲートG1〜G3、目標Ti(i=1〜4のいずれか)、目標tおよび無関係の目標TDの様々な位置関係における同化判定について図14〜図17を参照して説明する。
【0039】
図14の例では、ゲートG3内に目標Tiの中心が入っている。これにより、2次レーダ11の目標tに対して目標Tiの位置を推定する基となった1次レーダ10の目標Tが同一であると判定できる。また、このときは「同化精度情報=高」になる。
【0040】
図15の例では、ゲートG3、G2には目標Tiの中心が入っていない。しかしながらゲートG1に目標Tiの中心が入っている。これにより、2次レーダ11の目標tに対して目標Tiの位置を推定する基となった1次レーダ10の目標Tが同一であると判定できる。また、このときは「同化精度情報=低」になる。
【0041】
図16の例では、目標Tiの中心がゲートG3には入っていないがゲートG2には入っている。また、無関係の目標TDの中心もゲートG3には入っていないがゲートG2には入っている。これでは、2つの同化判定対象が存在し、いずれか一方に絞り込むことができない。このような場合には、同化判定は行わない。
【0042】
図17の例では、いずれの目標Ti、TDもゲートG1〜G3内に入っていない。よって、このような場合には同化判定は行わない。
【0043】
また、図18に示すように、実測点における目標Tの捕捉に欠落が発生した場合には、推定点における位置推定精度が劣化する。このような場合には、同化判定を行わないようにすることが好ましい。
【0044】
あるいは、2次レーダ11が目標tを捕捉した時刻から遡り1次レーダ10が当該目標tに該当する目標Tを捕捉したと推定される時刻において1次レーダ10が実際に目標Tを捕捉していないときには判定を行わないようにしてもよい。
【0045】
すなわち、図9に示すように、2次レーダ11が目標tを捕捉(図5、図7)した時刻から逆算することにより、1次レーダ10が目標Tを捕捉した時刻(図3、図4、図6)は計算可能である。この計算を行うためには、1次レーダ10と2次レーダ11の走査速度が分かっていればよい。
【0046】
したがって、目標tと同一であると判定する候補となる目標Tiの位置を推定する基となった1次レーダ10の目標Tが実測されるべき時刻を逆算して求め、この求めた結果の時刻と目標Tが実測された時刻とを比較し、一致すれば目標tと目標Tとは同一であると判定することができる。
【0047】
次に、データ処理部13の処理手順を図19にフローチャートを参照して説明する。
【0048】
START:レーダ装置1が稼働を開始し、2次レーダ11から目標tがデータ処理部13に入力されると、データ処理部13は、ステップS1の処理へ移行する。
【0049】
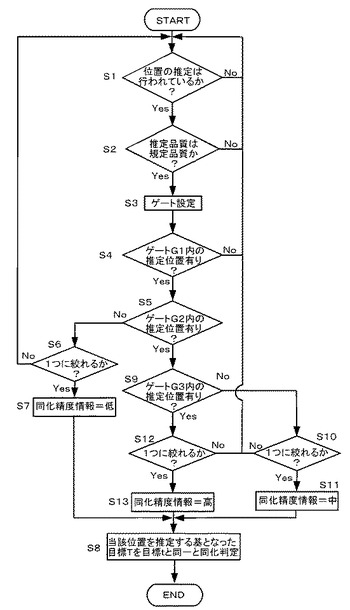
ステップS1:データ処理部13は、航跡追尾部12が目標Tiの位置の推定を行っているか否か判定する。データ処理部13は、航跡追尾部12が目標Tiの位置の推定を行っている場合(ステップS1でYes)、ステップS2の処理へ移行する。一方、データ処理部13は、航跡追尾部12が目標Tiの位置の推定を行っていない場合(ステップS1でNo)、ステップS1の処理を繰り返す。
【0050】
ステップS2:データ処理部13は、航跡追尾部12による目標Tiの位置の推定における推定品質が規定品質を満たしているか否か判定する。データ処理部13は、航跡追尾部12による目標Tiの位置の推定における推定品質が規定品質を満たしている場合(ステップS2でYes)、ステップS3の処理へ移行する。一方、データ処理部13は、航跡追尾部12による目標Tiの位置の推定における推定品質が規定品質を満たしていない場合(ステップS2でNo)、ステップS1の処理へ戻る。
【0051】
なお、前述したように、推定品質が規定品質を満たしているか否かの判定方法には2つの方法がある。1つ目の方法は、図18に示すように、実測点における目標Tの捕捉に欠落が発生したか否かを判定する方法である。2つ目の方法は、2次レーダ11が目標tを捕捉した時刻から遡り1次レーダ10が当該目標tに該当する目標Tを捕捉したと推定される時刻において1次レーダ10が実際に目標Tを捕捉しているか否かを判定する方法である。
【0052】
ステップS3:データ処理部13は、ゲートG1〜G3の設定を行い、ステップS4の処理へ移行する。
【0053】
ステップS4:データ処理部13は、ゲートG1内に目標Tiの中心があるか否か判定する。データ処理部13は、ゲートG1内に目標Tiの中心がある場合(ステップS4でYes)、ステップS5の処理へ移行する。一方、データ処理部13は、ゲートG1内に目標Tiの中心が無い場合(ステップS4でNo)、ステップS1の処理へ戻る。
【0054】
ステップS5:データ処理部13は、ゲートG2内に目標Tiの中心があるか否か判定する。データ処理部13は、ゲートG2内に目標Tiの中心がある場合(ステップS5でYes)、ステップS9の処理へ移行する。一方、データ処理部13は、ゲートG2内に目標Tiの中心が無い場合(ステップS5でNo)、ステップS6の処理へ移行する。
【0055】
ステップS6:データ処理部13は、ゲートG1に中心が入り、ゲートG2、G3には中心が入らない目標Tiが1つに絞れるか否か判定する。データ処理部13は、ゲートG1に中心が入り、ゲートG2、G3には中心が入らない推定目標Tiが1つに絞れる場合(ステップS6でYes)、ステップS7の処理へ移行する。一方、データ処理部13は、ゲートG1に中心が入り、ゲートG2、G3には中心が入らない推定目標Tiが1つに絞れない場合(ステップS6でNo)、ステップS1の処理へ戻る。
【0056】
ステップS7:データ処理部13は、1つに絞り込んだ目標Tiに対し「同化精度情報=低」を付与し、ステップS8の処理へ移行する。
【0057】
ステップS8:データ処理部13は、同化精度情報が付与された目標Tiの位置を推定する基となった1次レーダ10の目標Tが、2次レーダ11の目標tと同一であるとして同化判定して処理を終了する(END)。
【0058】
ステップS9:データ処理部13は、ゲートG3内に目標Tiの中心があるか否か判定する。データ処理部13は、ゲートG3内に目標Tiの中心がある場合(ステップS9でYes)、ステップS12の処理へ移行する。一方、データ処理部13は、ゲートG3内に目標Tiの中心が無い場合(ステップS9でNo)、ステップS10の処理へ移行する。
【0059】
ステップS10:データ処理部13は、ゲートG2に中心が入り、ゲートG3には中心が入らない目標Tiが1つに絞れるか否か判定する。データ処理部13は、ゲートG2に中心が入り、ゲートG3には中心が入らない目標Tiが1つに絞れる場合(ステップS10でYes)、ステップS11の処理へ移行する。一方、データ処理部13は、ゲートG2に中心が入り、ゲートG3には中心が入らない目標Tiが1つに絞れない場合(ステップS10でNo)、ステップS1の処理へ戻る。
【0060】
ステップS11:データ処理部13は、1つに絞り込んだ目標Tiに対し「同化精度情報=中」を付与し、ステップS8の処理へ移行する。
【0061】
ステップS12:データ処理部13は、ゲートG3に中心が入る目標Tiが1つに絞れるか否か判定する。データ処理部13は、ゲートG3に中心が入る目標Tiが1つに絞れる場合(ステップS12でYes)、ステップS13の処理へ移行する。一方、データ処理部13は、ゲートG3に中心が入る目標Tiが1つに絞れない場合(ステップS12でNo)、ステップS1の処理へ戻る。
【0062】
ステップS13:データ処理部13は、1つに絞り込んだ目標Tiに対し「同化精度情報=高」を付与し、ステップS8の処理へ移行する。
【0063】
(プログラムを用いる実施の形態)
レーダ装置1の航跡追尾部12、データ処理部13は、所定のプログラムにより動作する汎用の情報処理装置(CPU(Central Processing Unit)、DSP(Digital Signal
Processor)、マイクロプロセッサ(マイクロコンピュータ)など)によって構成されてもよい。例えば、汎用の情報処理装置は、メモリ、CPU、入出力ポートなどを有する。汎用の情報処理装置のCPUは、メモリなどから所定のプログラムとして制御プログラムを読み込んで実行する。これにより、汎用の情報処理装置には、レーダ装置1の航跡追尾部12、データ処理部13の機能が実現される。また、その他の機能についてもソフトウェアにより実現可能な機能については汎用の情報処理装置とプログラムとによって実現することができる。
【0064】
なお、汎用の情報処理装置が実行する制御プログラムは、レーダ装置1の航跡追尾部12、データ処理部13の出荷前に、汎用の情報処理装置のメモリなどに記憶されたものであっても、レーダ装置1の航跡追尾部12、データ処理部13の出荷後に、汎用の情報処理装置のメモリなどに記憶されたものであってもよい。また、制御プログラムの一部が、レーダ装置1の航跡追尾部12、データ処理部13の出荷後に、汎用の情報処理装置のメモリなどに記憶されたものであってもよい。レーダ装置1の航跡追尾部12、データ処理部13の出荷後に、汎用の情報処理装置のメモリなどに記憶される制御プログラムは、例えば、CD−ROMなどのコンピュータ読取可能な記録媒体に記憶されているものをインストールしたものであっても、インターネットなどの伝送媒体を介してダウンロードしたものをインストールしたものであってもよい。
【0065】
また、制御プログラムは、汎用の情報処理装置によって直接実行可能なものだけでなく、ハードディスクなどにインストールすることによって実行可能となるものも含む。また、圧縮されたり、暗号化されたりしたものも含む。
【0066】
(効果の説明)
以上説明したように、1次レーダ10が捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダ10が目標Tを捕捉していない期間における目標Tの位置を推定し、1次レーダ10と走査速度が非同期の2次レーダ11が目標tを捕捉した時刻に対応して推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと、位置が推定された目標Tとが同一のものであると同化判定するようにしたので、非同期に走査を行う1次レーダ10および2次レーダ11において捕捉した目標の同化判定処理を正確に行うことができる。
【0067】
たとえば所定の関係は、2次レーダ11が目標tを捕捉した時刻に対応する航跡追尾部12が推定した目標Tの位置が目標tの位置と所定の距離以内であるという関係である。
【0068】
これにより、高い精度を維持して同化判定処理を行うことができる。
【0069】
さらに、1次レーダ10における目標Tの捕捉が間欠的であるときには同化判定を行わないようにすることが好ましい。
【0070】
これにより、位置推定精度の低い目標Tiの位置についてはこれを除外し、高い精度を維持して同化判定処理を行うことができる。
【0071】
あるいは、2次レーダ11が目標tを捕捉した時刻から遡り1次レーダ10が当該目標tに該当する目標Tを捕捉したと推定される時刻において1次レーダ10が実際に目標Tを捕捉していないときには同化判定を行わないようにすることができる。
【0072】
これにより、位置推定精の低い目標Tiの位置についてはこれを除外し、高い精度を維持して同化判定処理を行うことができる。
【0073】
(他の実施の形態)
本発明の実施の形態は、その要旨を逸脱しない限り、様々に変更が可能である。たとえば、ゲートG1〜G3は、3段階のものを例示したが、この段階数は適宜増減してもよい。
【0074】
また、特許文献1は、1次レーダ10が追尾ビームを送信するレーダ装置であるが、レーダ装置1がそのようなものであってもよい。
【0075】
また、目標Tiの中心がゲートG1〜G3に入っているか否かで判定したが、その他にも目標Tiの面積がゲートG1〜G3に占める割合で判定したり、目標Tiの輪郭がゲートG1〜G3にかかっているか否かで判定するなどの方法を採ることができる。
【符号の説明】
【0076】
1…レーダ装置、10…1次レーダ、11…2次レーダ、12…航跡追尾部、13…データ処理部(目標同化部)、14…レーダ情報表示制御装置、15…表示部
【技術分野】
【0001】
本発明は、レーダ装置、目標同化判定処理方法およびプログラムに関する。
【背景技術】
【0002】
航空管制に使用される航空機監視用レーダは、1次レーダ(PSR:Primary Surveillance Radar)と2次レーダ(SSR:Secondary Surveillance Radar)とに大別される。1次レーダ(PSR)は、地上から電波を発し、これの反射波を受信処理することにより航空機の位置情報を取得するものである。一方、2次レーダ(SSR)は、航空機に搭載されたトランスポンダに質問信号を送信し、これに対する応答信号を受信することにより航空機に関する各種情報を得るものである。
【0003】
このように、1次レーダと2次レーダとを装備するレーダ装置では、1次レーダと2次レーダとは同期して走査するのが一般的である。これに対し、特許文献1に記載のレーダ装置は、目標の早期検出の要求を満たすため、1次レーダと2次レーダとが非同期で走査を行っている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−128442号公報(第「0011」段落など)
【発明の概要】
【発明が解決しようとする課題】
【0005】
1次レーダと2次レーダとを装備するレーダ装置では、1次レーダによる目標の位置情報と2次レーダによる目標の位置情報とに差異を有する場合がある。たとえば1次レーダと2次レーダとが同期して走査している場合であっても、2次レーダが取得する位置情報は、目標となる航空機などからの応答信号によって目標から通知された位置情報であり、この目標が有する位置測定精度に依存する。一方、1次レーダが取得する位置情報は、1次レーダ自らが取得した位置情報であり、この1次レーダが有する位置測定精度に依存する。このように異なる位置測定精度による2つの位置情報をそれぞれ取得するため1次レーダによる目標の位置情報と2次レーダによる目標の位置情報とに差異を生じる。
【0006】
また、特許文献1に記載のレーダ装置のように、1次レーダと2次レーダとが非同期で走査している場合、1次レーダが目標を捕捉する時刻と2次レーダが目標を捕捉する時刻とが離れている。このため、1次レーダが取得した目標の位置情報と2次レーダが取得した目標の位置情報とは大きな差異を生じる。
【0007】
このように1次レーダと2次レーダとを装備するレーダ装置では、1次レーダが取得した目標の位置情報と2次レーダが取得した目標の位置情報とに差異があるため、当該目標が同一の目標であるか否かを判定する処理が必要になる。以下では、この処理を同化判定処理と呼ぶことにする。
【0008】
この同化判定処理は、1次レーダと2次レーダとが同期して走査しているレーダ装置の場合、1次レーダが取得した目標の位置情報と2次レーダが取得した目標の位置情報との差異は小さく比較的容易に正確な同化判定が可能である。一方、同化判定処理は、1次レーダと2次レーダとが非同期で走査しているレーダ装置の場合、1次レーダが取得した目標の位置情報と2次レーダが取得した目標の位置情報との差異は大きく正確な同化判定は難しい。
【0009】
本発明は、このような背景の下に行われたものであって、非同期に走査を行う1次レーダおよび2次レーダにおいて捕捉した目標の同化判定処理を正確に行うことができるレーダ装置、目標同化判定処理方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の第一の観点は、レーダ装置としての観点である。すなわち、本発明のレーダ装置は、1次レーダと、この1次レーダと走査速度が非同期の2次レーダとを備えるレーダ装置において、1次レーダが捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダが目標Tを捕捉していない期間における目標Tの位置を推定する航跡追尾部と、2次レーダが目標tを捕捉した時刻に対応する航跡追尾部が推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと航跡追尾部が位置を推定する基となった目標Tとが同一のものであると判定する目標同化判定部と、を備えるものである。
【0011】
本発明の第二の観点は、目標同化判定処理方法としての観点である。すなわち、本発明の目標同化判定処理方法は、1次レーダと、この1次レーダと走査速度が非同期の2次レーダとを備えるレーダ装置が行う目標同化判定処理方法において、レーダ装置の航跡追尾部が、1次レーダが捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダが目標Tを捕捉していない期間における目標Tの位置を推定する航跡追尾ステップを実行し、レーダ装置の目標同化判定部が、2次レーダが目標tを捕捉した時刻に対応する航跡追尾部が推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと航跡追尾部が位置を推定する基となった目標Tとが同一のものであると判定する目標同化判定ステップを実行するものである。
【0012】
本発明の第三の観点は、プログラムである。すなわち、本発明のプログラムは、情報処理装置にインストールすることにより、その情報処理装置に、本発明のレーダ装置の機能を実現するものである。
【発明の効果】
【0013】
本発明によれば、非同期に走査を行う1次レーダおよび2次レーダにおいて捕捉した目標の同化判定処理を正確に行うことができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態に係るレーダ装置の全体構成図である。
【図2】図1に示す1次レーダおよび2次レーダのビーム方向を説明するための図である。
【図3】図1に示す1次レーダおよび2次レーダが目標を捕捉する様子を示す図であり、1次レーダの一方のビームが目標を捕捉する図である。
【図4】図1に示す1次レーダおよび2次レーダが目標を捕捉する様子を示す図であり、1次レーダの他方のビームが目標を捕捉する図である。
【図5】図1に示す1次レーダおよび2次レーダが目標を捕捉する様子を示す図であり、2次レーダのビームが目標を捕捉する図である。
【図6】図1に示す1次レーダおよび2次レーダが目標を捕捉する様子を示す図であり、1次レーダの一方のビームが目標を捕捉する図である。
【図7】図1に示す1次レーダおよび2次レーダが目標を捕捉する様子を示す図であり、2次レーダのビームが目標を捕捉する図である。
【図8】図1に示す1次レーダおよび2次レーダが目標を捕捉する様子を示す図であり、1次レーダの他方のビームが目標を捕捉する図である。
【図9】図1に示す1次レーダおよび2次レーダが目標を捕捉するタイミングを示す図である。
【図10】図1に示す1次レーダにおける実測点と図1に示す航跡追尾部における推定点とを説明するための図である。
【図11】図10に示す実測点と推定点における目標の位置の推定の様子を説明するための図である。
【図12】図1に示すデータ処理部が設定するゲートを説明するための図である。
【図13】図12に示すゲートに図11に示す推定点における目標の位置を重ね合わせた様子を示す図である。
【図14】図12に示すゲートにおける同化判定のパターンを示す図であり、最も同化精度の高い状態を示す図である。
【図15】図12に示すゲートにおける同化判定のパターンを示す図であり、最も同化精度の低い状態を示す図である。
【図16】図12に示すゲートにおける同化判定のパターンを示す図であり、同化判定を行わない状態を示す図である。
【図17】図12に示すゲートにおける同化判定のパターンを示す図であり、同化判定を行わない状態を示す図である。
【図18】図10に示す実測点に欠落が発生した状態を示す図である。
【図19】図1に示すデータ処理部の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0015】
(本発明の実施の形態に係るレーダ装置1の構成について)
本発明の実施の形態に係るレーダ装置1の構成について図1を参照して説明する。図1は、レーダ装置1の全体構成図である。レーダ装置1は、1次レーダ(PSR)10、2次レーダ(SSR)11、航跡追尾部12、データ処理部13、レーダ情報表示制御部14、表示部15により構成される。
【0016】
1次レーダ10は、地上から電波を発し、これの反射波を受信処理することにより航空機の位置情報を取得する。2次レーダ11は、航空機に搭載されたトランスポンダに質問信号を送信し、これに対する応答信号を受信することにより航空機に関する各種情報を得る。図2に、1次レーダ10のビームB1、B2および2次レーダ11のビームB3を示す。
【0017】
1次レーダ10は、ヒット数を増加させる観点から、常時は図2に示すように、互いに180度異なる2方向へビームB1、B2を形成して全方位を走査する。一方、2次レーダ11は、航空機との通信を行うのであるから、一方向へビームB3を形成して全方向を走査する。このように、1次レーダ10と2次レーダ11とは非同期で走査している。図2の例では、1次レーダ10のビーム方向に対して2次レーダ11のビーム方向が直交している。これは図示を分り易くするためであり、1次レーダ10と2次レーダ11の走査速度が異なれば1次レーダ10のビーム方向に対する2次レーダ11のビーム方向は時々刻々変化することになる。
【0018】
航跡追尾部12は、1次レーダ10が実際に目標Tを捕捉したときの位置情報を入力し、目標Tを捕捉した位置における移動速度および移動方向に基づき1次レーダ10がこの目標Tを捕捉していない期間における目標Tの位置を推定してデータ処理部13に出力する。
【0019】
データ処理部13は、航跡追尾部12から出力される目標Tの推定位置情報と2次レーダ11から出力される目標tの位置情報とを入力し、目標Tと目標tの同化判定処理を実施する。
【0020】
レーダ情報表示制御部14は、データ処理部13によって同化判定処理された目標を表示部15に表示する処理を行う。
【0021】
表示部15は、レーダ情報表示制御部14の出力をオペレータが視認できる形式で表示する。
【0022】
(レーダ装置1の動作について)
次に、レーダ装置1の動作について説明する。図3〜図8は、1つの飛行物体を1次レーダ10、2次レーダ11がそれぞれ目標T、目標tとして捕捉する様子を示す図である。なお、図3〜図8では、説明を分り易くするために、目標T、目標tとなる飛行物体は移動していないものとして説明する。たとえばこの飛行物体は上空の定点で移動せずにホバリングするヘリコプタである。
【0023】
図3では、1次レーダ10のビームB1が目標Tを捕捉している。また、図3では、1次レーダ10の両方のビームB1、B2の方向に対して2次レーダ11のビームB3が直交している。
【0024】
図4では、1次レーダ10のビームB2が目標Tを捕捉している。図4では、1次レーダ10のビームB1、B2が図3の状態から180度進み、2次レーダ11のビームB3が1次レーダ10のビームB2に近づいている。これにより、1次レーダ10の走査速度よりも2次レーダ11の走査速度の方が速いことがわかる。
【0025】
図5では、2次レーダ11のビームB3が目標tを捕捉している。
【0026】
図6では、1次レーダ10のビームB1が目標Tを捕捉している。図6では、1次レーダ10の走査が1周して図3の状態に戻っている。さらに、図6では、2次レーダ11のビームB3が1次レーダ10のビームB2を追い越している。
【0027】
図7では、図6において1次レーダ10のビームB2を追い越した2次レーダ11のビームB3が目標tを捕捉している。
【0028】
図8では、図6において2次レーダ11のビームB3に追い越された1次レーダ10のビームB2が目標Tを捕捉している。
【0029】
1次レーダ10および2次レーダ11における図3〜図8に示した目標T、目標tの捕捉タイミングを図9に示す。図9の黒丸は1次レーダ10による目標Tの捕捉タイミングである。図9の白丸は2次レーダ11による目標tの捕捉タイミングである。また、図9では黒丸、白丸にそれぞれ対応する図番を付してある。
【0030】
図9からわかるように、1次レーダ10が目標Tを捕捉するタイミングは180度毎に一回である。これに対し、2次レーダ11が目標tを捕捉するタイミングは、360度毎に一回である。また、1次レーダ10の走査速度と2次レーダ11の走査速度が異なるため、1次レーダ10が目標Tを捕捉するタイミングに対する2次レーダ11が目標tを捕捉するタイミングの関係は一定ではない。
【0031】
レーダ装置1の航跡追尾部12は、図9に示す1次レーダ10の目標Tの検出タイミングの合間における目標Tの位置を推定する。すなわち、図10に示すように、実測点の合間に推定点を設け、この推定点における目標Tの位置を推定する。
【0032】
航跡追尾部12が行う目標Tの位置の推定方法については、既知の様々な推定方法が適用できるものとする。その1例を挙げると、たとえば実測点における目標Tの実際の位置における移動方向および移動速度の各情報に基づき目標Tが実測点における位置からそのままの移動方向にそのままの移動速度で移動したと仮定した場合の位置を推定する。このような推定処理を追尾平滑化処理という。このようにして推定された目標Tの推定位置を図11に示す。なお、目標T1〜T4は、推定位置に対応して架空に表示されている図形である。
【0033】
なお、図3〜図8の説明では、説明を分り易くするために、目標T、目標tとなる飛行物体は移動していないものとして説明したが、図11では、目標Tは南東方向に移動するものとする。よって、図11に示すように、航跡追尾部12は、実測点と実測点との間に4つの推定点における目標Tの位置を目標T1〜T4として推定する。
【0034】
また、データ処理部13は、図12に示すように、2次レーダ11のビームB3により捕捉した目標tの位置を中心として、距離方向と方位方向の3段階の大きさでゲートG1〜G3を設定する。ゲートG3は、目標tの位置からの距離が最も短いゲートである。また、ゲートG1は、目標tの位置からの距離が最も長いゲートである。また、ゲートG2は、ゲートG1とゲートG3との中間に位置するゲートである。
【0035】
続いて、データ処理部13は、図13に示すように、図11で説明した目標Tに対する推定位置にある架空の目標T1〜T4をゲートG1〜G3に重ね合わせてみる。その結果、目標T4の中心(黒点として図示)がゲートG3内に入る。また、目標T3の中心についてもゲートG2内に入る。よって、データ処理部13は、目標T3、T4の位置を推定する基となった1次レーダ10の目標Tが2次レーダ11の目標tと同一であると判定する。以下ではこのような判定を同化判定と呼ぶことにする。これにより、データ処理部13によって、目標Tと目標tとは同化判定処理される。なお、図13の例では、目標T1〜T4が円形であるため中心を特定することは容易であるが、目標T1〜T4が複雑な形である場合には、その重心位置などを中心とするなどの一定のルールを設ければよい。
【0036】
また、データ処理部13は、同化判定の際に、いずれのゲートG1〜G3で同化判定されたかを同化精度情報として記録してもよい。また、データ処理部13は、このような同化精度情報をレーダ装置1の表示画面上に表示してもよい。たとえばレーダ情報表示制御部14は、表示部15の表示画面上に目標を表示する際に、精度情報毎に目標を色分けするなどしてオペレータが同化精度情報を視認できるようにしてもよい。
【0037】
すなわち、2次レーダ11の目標tに最も近いゲートG3内に目標Ti(iは1〜4のいずれか)の中心が入って同化判定された場合には「同化精度情報=高」とし、目標Tiの中心がゲートG3内には入らずゲートG2内に入って同化判定された場合には「同化精度情報=中」とし、目標Tiの中心がゲートG2、G3内には入らずゲートG1内のみに入って同化判定された場合には「同化精度情報=低」などとする。
【0038】
次に、ゲートG1〜G3、目標Ti(i=1〜4のいずれか)、目標tおよび無関係の目標TDの様々な位置関係における同化判定について図14〜図17を参照して説明する。
【0039】
図14の例では、ゲートG3内に目標Tiの中心が入っている。これにより、2次レーダ11の目標tに対して目標Tiの位置を推定する基となった1次レーダ10の目標Tが同一であると判定できる。また、このときは「同化精度情報=高」になる。
【0040】
図15の例では、ゲートG3、G2には目標Tiの中心が入っていない。しかしながらゲートG1に目標Tiの中心が入っている。これにより、2次レーダ11の目標tに対して目標Tiの位置を推定する基となった1次レーダ10の目標Tが同一であると判定できる。また、このときは「同化精度情報=低」になる。
【0041】
図16の例では、目標Tiの中心がゲートG3には入っていないがゲートG2には入っている。また、無関係の目標TDの中心もゲートG3には入っていないがゲートG2には入っている。これでは、2つの同化判定対象が存在し、いずれか一方に絞り込むことができない。このような場合には、同化判定は行わない。
【0042】
図17の例では、いずれの目標Ti、TDもゲートG1〜G3内に入っていない。よって、このような場合には同化判定は行わない。
【0043】
また、図18に示すように、実測点における目標Tの捕捉に欠落が発生した場合には、推定点における位置推定精度が劣化する。このような場合には、同化判定を行わないようにすることが好ましい。
【0044】
あるいは、2次レーダ11が目標tを捕捉した時刻から遡り1次レーダ10が当該目標tに該当する目標Tを捕捉したと推定される時刻において1次レーダ10が実際に目標Tを捕捉していないときには判定を行わないようにしてもよい。
【0045】
すなわち、図9に示すように、2次レーダ11が目標tを捕捉(図5、図7)した時刻から逆算することにより、1次レーダ10が目標Tを捕捉した時刻(図3、図4、図6)は計算可能である。この計算を行うためには、1次レーダ10と2次レーダ11の走査速度が分かっていればよい。
【0046】
したがって、目標tと同一であると判定する候補となる目標Tiの位置を推定する基となった1次レーダ10の目標Tが実測されるべき時刻を逆算して求め、この求めた結果の時刻と目標Tが実測された時刻とを比較し、一致すれば目標tと目標Tとは同一であると判定することができる。
【0047】
次に、データ処理部13の処理手順を図19にフローチャートを参照して説明する。
【0048】
START:レーダ装置1が稼働を開始し、2次レーダ11から目標tがデータ処理部13に入力されると、データ処理部13は、ステップS1の処理へ移行する。
【0049】
ステップS1:データ処理部13は、航跡追尾部12が目標Tiの位置の推定を行っているか否か判定する。データ処理部13は、航跡追尾部12が目標Tiの位置の推定を行っている場合(ステップS1でYes)、ステップS2の処理へ移行する。一方、データ処理部13は、航跡追尾部12が目標Tiの位置の推定を行っていない場合(ステップS1でNo)、ステップS1の処理を繰り返す。
【0050】
ステップS2:データ処理部13は、航跡追尾部12による目標Tiの位置の推定における推定品質が規定品質を満たしているか否か判定する。データ処理部13は、航跡追尾部12による目標Tiの位置の推定における推定品質が規定品質を満たしている場合(ステップS2でYes)、ステップS3の処理へ移行する。一方、データ処理部13は、航跡追尾部12による目標Tiの位置の推定における推定品質が規定品質を満たしていない場合(ステップS2でNo)、ステップS1の処理へ戻る。
【0051】
なお、前述したように、推定品質が規定品質を満たしているか否かの判定方法には2つの方法がある。1つ目の方法は、図18に示すように、実測点における目標Tの捕捉に欠落が発生したか否かを判定する方法である。2つ目の方法は、2次レーダ11が目標tを捕捉した時刻から遡り1次レーダ10が当該目標tに該当する目標Tを捕捉したと推定される時刻において1次レーダ10が実際に目標Tを捕捉しているか否かを判定する方法である。
【0052】
ステップS3:データ処理部13は、ゲートG1〜G3の設定を行い、ステップS4の処理へ移行する。
【0053】
ステップS4:データ処理部13は、ゲートG1内に目標Tiの中心があるか否か判定する。データ処理部13は、ゲートG1内に目標Tiの中心がある場合(ステップS4でYes)、ステップS5の処理へ移行する。一方、データ処理部13は、ゲートG1内に目標Tiの中心が無い場合(ステップS4でNo)、ステップS1の処理へ戻る。
【0054】
ステップS5:データ処理部13は、ゲートG2内に目標Tiの中心があるか否か判定する。データ処理部13は、ゲートG2内に目標Tiの中心がある場合(ステップS5でYes)、ステップS9の処理へ移行する。一方、データ処理部13は、ゲートG2内に目標Tiの中心が無い場合(ステップS5でNo)、ステップS6の処理へ移行する。
【0055】
ステップS6:データ処理部13は、ゲートG1に中心が入り、ゲートG2、G3には中心が入らない目標Tiが1つに絞れるか否か判定する。データ処理部13は、ゲートG1に中心が入り、ゲートG2、G3には中心が入らない推定目標Tiが1つに絞れる場合(ステップS6でYes)、ステップS7の処理へ移行する。一方、データ処理部13は、ゲートG1に中心が入り、ゲートG2、G3には中心が入らない推定目標Tiが1つに絞れない場合(ステップS6でNo)、ステップS1の処理へ戻る。
【0056】
ステップS7:データ処理部13は、1つに絞り込んだ目標Tiに対し「同化精度情報=低」を付与し、ステップS8の処理へ移行する。
【0057】
ステップS8:データ処理部13は、同化精度情報が付与された目標Tiの位置を推定する基となった1次レーダ10の目標Tが、2次レーダ11の目標tと同一であるとして同化判定して処理を終了する(END)。
【0058】
ステップS9:データ処理部13は、ゲートG3内に目標Tiの中心があるか否か判定する。データ処理部13は、ゲートG3内に目標Tiの中心がある場合(ステップS9でYes)、ステップS12の処理へ移行する。一方、データ処理部13は、ゲートG3内に目標Tiの中心が無い場合(ステップS9でNo)、ステップS10の処理へ移行する。
【0059】
ステップS10:データ処理部13は、ゲートG2に中心が入り、ゲートG3には中心が入らない目標Tiが1つに絞れるか否か判定する。データ処理部13は、ゲートG2に中心が入り、ゲートG3には中心が入らない目標Tiが1つに絞れる場合(ステップS10でYes)、ステップS11の処理へ移行する。一方、データ処理部13は、ゲートG2に中心が入り、ゲートG3には中心が入らない目標Tiが1つに絞れない場合(ステップS10でNo)、ステップS1の処理へ戻る。
【0060】
ステップS11:データ処理部13は、1つに絞り込んだ目標Tiに対し「同化精度情報=中」を付与し、ステップS8の処理へ移行する。
【0061】
ステップS12:データ処理部13は、ゲートG3に中心が入る目標Tiが1つに絞れるか否か判定する。データ処理部13は、ゲートG3に中心が入る目標Tiが1つに絞れる場合(ステップS12でYes)、ステップS13の処理へ移行する。一方、データ処理部13は、ゲートG3に中心が入る目標Tiが1つに絞れない場合(ステップS12でNo)、ステップS1の処理へ戻る。
【0062】
ステップS13:データ処理部13は、1つに絞り込んだ目標Tiに対し「同化精度情報=高」を付与し、ステップS8の処理へ移行する。
【0063】
(プログラムを用いる実施の形態)
レーダ装置1の航跡追尾部12、データ処理部13は、所定のプログラムにより動作する汎用の情報処理装置(CPU(Central Processing Unit)、DSP(Digital Signal
Processor)、マイクロプロセッサ(マイクロコンピュータ)など)によって構成されてもよい。例えば、汎用の情報処理装置は、メモリ、CPU、入出力ポートなどを有する。汎用の情報処理装置のCPUは、メモリなどから所定のプログラムとして制御プログラムを読み込んで実行する。これにより、汎用の情報処理装置には、レーダ装置1の航跡追尾部12、データ処理部13の機能が実現される。また、その他の機能についてもソフトウェアにより実現可能な機能については汎用の情報処理装置とプログラムとによって実現することができる。
【0064】
なお、汎用の情報処理装置が実行する制御プログラムは、レーダ装置1の航跡追尾部12、データ処理部13の出荷前に、汎用の情報処理装置のメモリなどに記憶されたものであっても、レーダ装置1の航跡追尾部12、データ処理部13の出荷後に、汎用の情報処理装置のメモリなどに記憶されたものであってもよい。また、制御プログラムの一部が、レーダ装置1の航跡追尾部12、データ処理部13の出荷後に、汎用の情報処理装置のメモリなどに記憶されたものであってもよい。レーダ装置1の航跡追尾部12、データ処理部13の出荷後に、汎用の情報処理装置のメモリなどに記憶される制御プログラムは、例えば、CD−ROMなどのコンピュータ読取可能な記録媒体に記憶されているものをインストールしたものであっても、インターネットなどの伝送媒体を介してダウンロードしたものをインストールしたものであってもよい。
【0065】
また、制御プログラムは、汎用の情報処理装置によって直接実行可能なものだけでなく、ハードディスクなどにインストールすることによって実行可能となるものも含む。また、圧縮されたり、暗号化されたりしたものも含む。
【0066】
(効果の説明)
以上説明したように、1次レーダ10が捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダ10が目標Tを捕捉していない期間における目標Tの位置を推定し、1次レーダ10と走査速度が非同期の2次レーダ11が目標tを捕捉した時刻に対応して推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと、位置が推定された目標Tとが同一のものであると同化判定するようにしたので、非同期に走査を行う1次レーダ10および2次レーダ11において捕捉した目標の同化判定処理を正確に行うことができる。
【0067】
たとえば所定の関係は、2次レーダ11が目標tを捕捉した時刻に対応する航跡追尾部12が推定した目標Tの位置が目標tの位置と所定の距離以内であるという関係である。
【0068】
これにより、高い精度を維持して同化判定処理を行うことができる。
【0069】
さらに、1次レーダ10における目標Tの捕捉が間欠的であるときには同化判定を行わないようにすることが好ましい。
【0070】
これにより、位置推定精度の低い目標Tiの位置についてはこれを除外し、高い精度を維持して同化判定処理を行うことができる。
【0071】
あるいは、2次レーダ11が目標tを捕捉した時刻から遡り1次レーダ10が当該目標tに該当する目標Tを捕捉したと推定される時刻において1次レーダ10が実際に目標Tを捕捉していないときには同化判定を行わないようにすることができる。
【0072】
これにより、位置推定精の低い目標Tiの位置についてはこれを除外し、高い精度を維持して同化判定処理を行うことができる。
【0073】
(他の実施の形態)
本発明の実施の形態は、その要旨を逸脱しない限り、様々に変更が可能である。たとえば、ゲートG1〜G3は、3段階のものを例示したが、この段階数は適宜増減してもよい。
【0074】
また、特許文献1は、1次レーダ10が追尾ビームを送信するレーダ装置であるが、レーダ装置1がそのようなものであってもよい。
【0075】
また、目標Tiの中心がゲートG1〜G3に入っているか否かで判定したが、その他にも目標Tiの面積がゲートG1〜G3に占める割合で判定したり、目標Tiの輪郭がゲートG1〜G3にかかっているか否かで判定するなどの方法を採ることができる。
【符号の説明】
【0076】
1…レーダ装置、10…1次レーダ、11…2次レーダ、12…航跡追尾部、13…データ処理部(目標同化部)、14…レーダ情報表示制御装置、15…表示部
【特許請求の範囲】
【請求項1】
1次レーダと、この1次レーダと走査速度が非同期の2次レーダとを備えるレーダ装置において、
上記1次レーダが捕捉した目標Tの位置における上記目標Tの移動速度および移動方向の情報に基づき上記1次レーダが上記目標Tを捕捉していない期間における上記目標Tの位置を推定する航跡追尾部と、
上記2次レーダが目標tを捕捉した時刻に対応する上記航跡追尾部が推定した上記目標Tの位置が上記目標tの位置と所定の関係にあるときに、上記目標tと上記航跡追尾部が位置を推定する基となった上記目標Tとが同一のものであると判定する目標同化判定部と、
を備える、
ことを特徴とするレーダ装置。
【請求項2】
請求項1記載のレーダ装置において、
前記所定の関係は、前記2次レーダが目標tを捕捉した時刻に対応する前記航跡追尾部が推定した前記目標Tの位置が前記目標tの位置と所定の距離以内であるという関係である、
ことを特徴とするレーダ装置。
【請求項3】
請求項1または2記載のレーダ装置において、
前記1次レーダにおける前記目標Tの捕捉が間欠的であるときには前記判定を行わない、
ことを特徴とするレーダ装置。
【請求項4】
請求項1または2記載のレーダ装置において、
前記2次レーダが前記目標tを捕捉した時刻から遡り前記1次レーダが当該目標tに該当する前記目標Tを捕捉したと推定される時刻において前記1次レーダが実際に前記目標Tを捕捉していないときには前記判定を行わない、
ことを特徴とするレーダ装置。
【請求項5】
1次レーダと、この1次レーダと走査速度が非同期の2次レーダとを備えるレーダ装置が行う目標同化判定処理方法において、
上記レーダ装置の航跡追尾部が、上記1次レーダが捕捉した目標Tの位置における上記目標Tの移動速度および移動方向の情報に基づき上記1次レーダが上記目標Tを捕捉していない期間における上記目標Tの位置を推定する航跡追尾ステップを実行し、
上記レーダ装置の目標同化判定部が、上記2次レーダが目標tを捕捉した時刻に対応する上記航跡追尾部が推定した上記目標Tの位置が上記目標tの位置と所定の関係にあるときに、上記目標tと上記航跡追尾部が位置を推定する基となった上記目標Tとが同一のものであると判定する目標同化ステップを実行する、
ことを特徴とする目標同化判定処理方法。
【請求項6】
請求項5記載の目標同化判定処理方法において、
前記所定の関係は、前記2次レーダが目標tを捕捉した時刻に対応する前記航跡追尾部が推定した前記目標Tの位置が前記目標tの位置と所定の距離以内であるという関係である、
ことを特徴とする目標同化判定処理方法。
【請求項7】
請求項5または6記載の目標同化判定処理方法において、
前記1次レーダにおける前記目標Tの捕捉が間欠的であるときには前記判定を行わない、
ことを特徴とする目標同化判定処理方法。
【請求項8】
請求項5または6記載の目標同化判定処理方法において、
前記2次レーダが前記目標tを捕捉した時刻から遡り前記1次レーダが当該目標tに該当する前記目標Tを捕捉したと推定される時刻において前記1次レーダが実際に前記目標Tを捕捉していないときには前記判定を行わない、
ことを特徴とする目標同化判定処理方法。
【請求項9】
情報処理装置にインストールすることにより、その情報処理装置に、請求項1から4のいずれか1項記載のレーダ装置の機能を実現することを特徴とするプログラム。
【請求項1】
1次レーダと、この1次レーダと走査速度が非同期の2次レーダとを備えるレーダ装置において、
上記1次レーダが捕捉した目標Tの位置における上記目標Tの移動速度および移動方向の情報に基づき上記1次レーダが上記目標Tを捕捉していない期間における上記目標Tの位置を推定する航跡追尾部と、
上記2次レーダが目標tを捕捉した時刻に対応する上記航跡追尾部が推定した上記目標Tの位置が上記目標tの位置と所定の関係にあるときに、上記目標tと上記航跡追尾部が位置を推定する基となった上記目標Tとが同一のものであると判定する目標同化判定部と、
を備える、
ことを特徴とするレーダ装置。
【請求項2】
請求項1記載のレーダ装置において、
前記所定の関係は、前記2次レーダが目標tを捕捉した時刻に対応する前記航跡追尾部が推定した前記目標Tの位置が前記目標tの位置と所定の距離以内であるという関係である、
ことを特徴とするレーダ装置。
【請求項3】
請求項1または2記載のレーダ装置において、
前記1次レーダにおける前記目標Tの捕捉が間欠的であるときには前記判定を行わない、
ことを特徴とするレーダ装置。
【請求項4】
請求項1または2記載のレーダ装置において、
前記2次レーダが前記目標tを捕捉した時刻から遡り前記1次レーダが当該目標tに該当する前記目標Tを捕捉したと推定される時刻において前記1次レーダが実際に前記目標Tを捕捉していないときには前記判定を行わない、
ことを特徴とするレーダ装置。
【請求項5】
1次レーダと、この1次レーダと走査速度が非同期の2次レーダとを備えるレーダ装置が行う目標同化判定処理方法において、
上記レーダ装置の航跡追尾部が、上記1次レーダが捕捉した目標Tの位置における上記目標Tの移動速度および移動方向の情報に基づき上記1次レーダが上記目標Tを捕捉していない期間における上記目標Tの位置を推定する航跡追尾ステップを実行し、
上記レーダ装置の目標同化判定部が、上記2次レーダが目標tを捕捉した時刻に対応する上記航跡追尾部が推定した上記目標Tの位置が上記目標tの位置と所定の関係にあるときに、上記目標tと上記航跡追尾部が位置を推定する基となった上記目標Tとが同一のものであると判定する目標同化ステップを実行する、
ことを特徴とする目標同化判定処理方法。
【請求項6】
請求項5記載の目標同化判定処理方法において、
前記所定の関係は、前記2次レーダが目標tを捕捉した時刻に対応する前記航跡追尾部が推定した前記目標Tの位置が前記目標tの位置と所定の距離以内であるという関係である、
ことを特徴とする目標同化判定処理方法。
【請求項7】
請求項5または6記載の目標同化判定処理方法において、
前記1次レーダにおける前記目標Tの捕捉が間欠的であるときには前記判定を行わない、
ことを特徴とする目標同化判定処理方法。
【請求項8】
請求項5または6記載の目標同化判定処理方法において、
前記2次レーダが前記目標tを捕捉した時刻から遡り前記1次レーダが当該目標tに該当する前記目標Tを捕捉したと推定される時刻において前記1次レーダが実際に前記目標Tを捕捉していないときには前記判定を行わない、
ことを特徴とする目標同化判定処理方法。
【請求項9】
情報処理装置にインストールすることにより、その情報処理装置に、請求項1から4のいずれか1項記載のレーダ装置の機能を実現することを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2010−237022(P2010−237022A)
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願番号】特願2009−85077(P2009−85077)
【出願日】平成21年3月31日(2009.3.31)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願日】平成21年3月31日(2009.3.31)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]