
レーダ装置
【課題】航空機から送信された信号の反射信号を利用して航法支援する。
【解決手段】レーダ装置は、受信部と、相関処理部と、演算部とを備える。受信部は、アンテナを介して、第1航空機から送信された拡張スキッタをΩチャンネルで受信するとともに、当該拡張スキッタが第2航空機で反射した反射信号をΣチャンネル及びΔチャンネルで受信する。相関処理部は、受信部が受信した拡張スキッタと当該拡張スキッタの反射信号との遅延時間を求める。演算部は、受信部が受信した拡張スキッタと、当該拡張スキッタの反射信号を受信した際のアンテナの回転角度と、相関処理部で求められた遅延時間とを利用して、他の航空機の位置を推定する。
【解決手段】レーダ装置は、受信部と、相関処理部と、演算部とを備える。受信部は、アンテナを介して、第1航空機から送信された拡張スキッタをΩチャンネルで受信するとともに、当該拡張スキッタが第2航空機で反射した反射信号をΣチャンネル及びΔチャンネルで受信する。相関処理部は、受信部が受信した拡張スキッタと当該拡張スキッタの反射信号との遅延時間を求める。演算部は、受信部が受信した拡張スキッタと、当該拡張スキッタの反射信号を受信した際のアンテナの回転角度と、相関処理部で求められた遅延時間とを利用して、他の航空機の位置を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、航空機から送信された信号の反射信号を受信するレーダ装置に関する。
【背景技術】
【0002】
航空機は、飛行の安全を図るため、質問信号や応答信号を送受信するモードS二次監視レーダ装置等のレーダ装置を利用して監視されている。また、航空機同士の衝突を防止するために航空機同士で位置情報を交換する放送型自動従属監視(ADS−B:Automatic Dependent Surveillance-Broadcast)も利用されている。
【0003】
一方、モードS二次監視レーダ装置と信号の送受信が可能な航空機ばかりでなく、モードS二次監視レーダと信号の送受信を行うトランスポンダを備えていない航空機もある。このような航空機の場合、地上のレーダ装置ではトランスポンダを搭載しない航空機の飛行を把握することが困難である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−10629号公報
【特許文献2】特開2000−137073号公報
【特許文献3】特開平5−142341号公報
【非特許文献】
【0005】
【非特許文献1】“Aeronautical Telecommunications,ANNEX10,VOLUMEIV”,Surveillance Radar and Collision Avoidance Systems,1996年7月,ICAO
【非特許文献2】“SSRモードS概説書”,平成14年12月,国土交通省航空局管制保安部無線課
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したように、モードS二次監視レーダでは、飛行を監視できない航空機が存在することがあった。
【課題を解決するための手段】
【0007】
本発明の実施形態に係るレーダ装置は、受信部と、相関処理部と、演算部とを備える。受信部は、アンテナを介して、第1航空機から送信された拡張スキッタをΩチャンネルで受信するとともに、当該拡張スキッタが第2航空機で反射した反射信号をΣチャンネル及びΔチャンネルで受信する。相関処理部は、受信部が受信した拡張スキッタと当該拡張スキッタの反射信号との遅延時間を求める。演算部は、受信部が受信した拡張スキッタと、当該拡張スキッタの反射信号を受信した際のアンテナの回転角度と、相関処理部で求められた遅延時間とを利用して、他の航空機の位置を推定する。
【図面の簡単な説明】
【0008】
【図1】実施形態に係るレーダ装置が受信する信号を説明する概略図である。
【図2】実施形態に係るレーダ装置の構成を説明するブロック図である。
【図3】図1のレーダ装置での演算を説明する概略図である。
【発明を実施するための形態】
【0009】
以下に、図面を用いて実施形態に係るレーダ装置について説明する。実施形態に係るレーダ装置は、航空機から送信された送信信号が他の航空機に反射した反射信号を受信して解析して航空機を監視する装置である。以下では、実施形態に係るレーダ装置が航空機との間で信号の送受信を行って航空機を監視するモードS二次監視レーダ装置に備えられているものとして説明するが、質問は送信せず、反射信号を利用して航空機を監視する機能のみを備えていても実現することができる。
【0010】
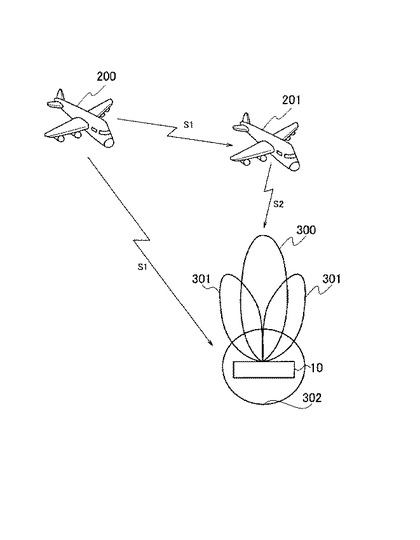
具体的には、図1に示すように、実施形態に係るモードS二次監視レーダのアンテナ10は、第1航空機200が送信した拡張スキッタS1を受信するとともに、拡張スキッタS1が他の航空機である第2航空機201を反射した反射信号S2を受信する。ここで、モードS二次監視レーダのアンテナ10は、INTパターン(Σパターン)300、モノパルスパターン(Δパターン)301、全周パターン(Ωパターン)302で信号を受信する。
【0011】
Σパターン300では、指向性があるが、信号の受信感度が高い。一方、Ωパターン302では、無指向性であるが、信号の受信感度が低い。また、反射信号S2は、拡張スキッタS1が第2航空機201で反射した信号であるため、拡張スキッタS1よりも電力が小さい。したがって、アンテナ10は、受信感度の低いΩパターン302では、第1航空機200が送信した拡張スキッタS1を受信することができるが、拡張スキッタS1より電力の小さい反射信号S2を受信することはできない。したがって、アンテナ10は、受信感度の高いΣパターン300やΔパターン301でのみ反射信号S2を受信することができる。
【0012】
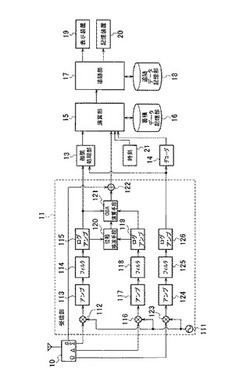
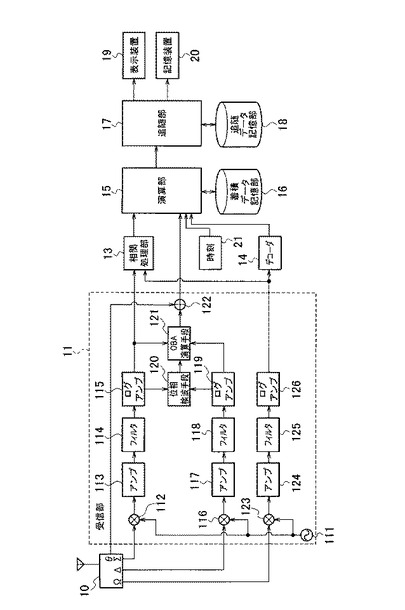
図2に示すように、実施形態に係るモードS二次監視レーダ1は、アンテナ10を介してΣパターン、Δパターン、Σパターンの信号を受信する受信部11と、受信部11がΣパターンで受信した信号とΩパターンで受信した信号の相関を求める相関処理部13と、Ωパターンで受信した信号をデコードするデコーダ14と、受信部11の処理結果、相関処理部13の処理結果及びデコーダ14の処理結果を利用して航空機の位置を推定する演算部15と、航空機の情報を蓄積して記憶する蓄積データ記憶部16と、演算部15の処理結果を利用して航空機を追随する追随部17と、追随する航空機の情報を記憶する追随データ記憶部18と、追随部17の処理結果を表示する表示装置19と、追随部17の処理結果を記憶する記憶装置20とを備えている。
【0013】
なお、モードS二次監視レーダ1は、一般的なモードS二次監視レーダが備えるような、質問信号を送信する処理部、受信したモードS信号を解析処理する処理部、受信したATCRBS信号を解析処理する処理部、解析されたモードS信号及びATCRBS信号の解析結果からレポートを生成する処理部等を備えているが、図2では省略している。
【0014】
受信部11は、一般的なモードS二次監視レーダの受信部であって、図2に示すように、アンテナ10を介して入力するΣパターンの信号と局発111からの信号とを混合するミキサ112と、混合された信号を増幅するアンプ113と、増幅された信号を帯域調整するフィルタ114と、帯域調整された信号を対数調整(圧縮又は拡張)するログアンプ115と、アンテナ10を介して入力するΔパターンの信号と局発111からの信号とを混合するミキサ116と、混合された信号を増幅するアンプ117と、増幅された信号を帯域調整するフィルタ118と、帯域調整された信号を対数調整(圧縮又は拡張)するログアンプ119と、Σパターンの信号とΔパターンの信号を利用して信号の位相の符号を判定する位相検波手段120と、判定された位相の符号を利用して信号のビーム内角度を決定するOBA演算手段121と、決定したビーム内角度とアンテナ10から入力するアンテナ10の機械的指向角を加算して絶対値であるアンテナ10の回転角度を求める加算器122と、アンテナ10を介して入力するΩパターンの信号と局発111からの信号とを混合するミキサ123と、混合された信号を増幅するアンプ124と、増幅された信号を帯域調整するフィルタ125と、帯域調整された信号を対数調整(圧縮又は拡張)するログアンプ126とを備えている。
【0015】
相関処理部13は、ログアンプ115から出力されたΣパターンの信号と、ログアンプ126から出力されたΩパターンの信号とを入力し、相関を求めてΣパターンの信号とΩパターンの信号との遅延量である時間的相関を求める。すなわち、図1に示す例で第1航空機200が送信した拡張スキッタS1は、Ωパターン302で受信される。一方、第2航空機201で拡張スキッタS1が反射した反射信号S2は、Σパターン300で受信される。また、反射信号S2は拡張スキッタS1が反射した信号であるため、拡張スキッタS1の内容と反射信号S2の内容は同一である。したがって、相関処理部13は、Σパターンの信号とΩパターンの信号とから同一信号の時間的相関を求めることで、拡張スキッタS1受信から反射信号S2受信までの遅延時間を求めることができる。
【0016】
デコーダ14は、ログアンプ126から入力したΩパターンの信号を入力し、デコードする。すなわち、デコーダ14は、第1航空機200が送信した拡張スキッタS1をデコードする。したがって、デコーダ14のデコード結果には、第1航空機200のモードSアドレス、位置情報等が含まれる。
【0017】
演算部15は、受信部11からアンテナ10の回転角度を入力し、相関処理部13から時間的相関を入力し、デコーダ14からΩパターンの信号のデコード結果を入力すると、入力したデータ及び時刻発生手段21で発生した時刻を蓄積データ記憶部16の蓄積データに追加するとともに、蓄積データから第1航空機200の過去のデータを抽出して利用することで拡張スキッタS1を反射した第2航空機201の位置を推定する。ここで、受信部11、相関処理部13及びデコーダ14における処理に要する時間は把握することができるため、演算部15は、時刻発生手段21から入力する時刻を利用して信号を受信した時刻を求めることができる。
【0018】
拡張スキッタS1を送信した第1航空機200の位置情報は、拡張スキッタS1に含まれているため、モードS二次監視レーダ1で把握することができる。一方、第2航空機201で反射された反射信号S2に含まれている位置情報は第1航空機200の位置情報であって、第2航空機201の位置情報は含まれていないため、モードS二次監視レーダ1は把握することができない。したがって、演算部15は、得られた情報から、第2航空機201の位置を推定する。
【0019】
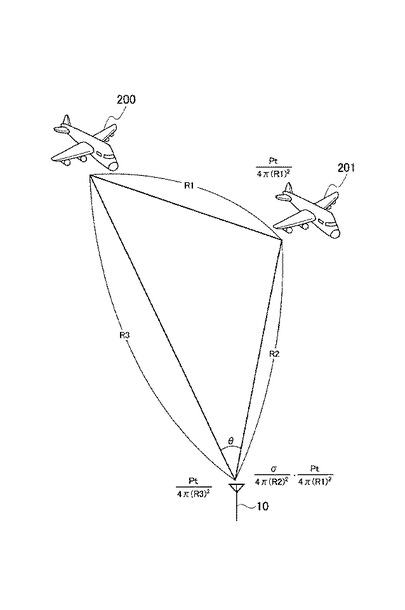
例えば、アンテナ10、第1航空機200、第2航空機201の位置関係は、図3に示すような三角形で表される。図3は、第1航空機200と第2航空機201間を距離R1、第2航空機201とアンテナ10間を距離R2、第1航空機200とアンテナ10間を距離R3とし、アンテナ10と第1航空機200及び第2航空機201で形成する角度をθ1とした例である。
【0020】
まず、演算部15は、第1航空機200とアンテナ10の位置から、距離R3を求める。すなわち、アンテナ10は固定であるため、演算部15は、予めアンテナ10の位置を把握している。また、第1航空機200が送信した拡張スキッタS1は第1航空機200の位置を含んでいることから、演算部15は、デコーダ14のデコード結果から第1航空機200の位置を把握することができる。
【0021】
また、演算部15は、距離R3と、拡張スキッタS1の受信から反射信号S2の受信までの遅延時間とから、「距離R1+距離R2」を求める。すなわち、演算部15は、相関処理部13の求めた時間的相関から、拡張スキッタS1の受信から反射信号S2の受信までの遅延時間を把握することができる。この遅延時間と距離R3とを利用して、演算部15は、距離R1+距離R2を求める。
【0022】
さらに、演算部15は、加算器122から、Σパターンの信号とΔパターンの信号を利用したモノパルス測角とアンテナ10の回転角度θを利用して求められた第2航空機201の精密な方位角度θ1を入力する。
【0023】
その後、演算部15は、距離R3と、距離R1+距離R2と、角度θ1とから、距離R2を求める。ここで、演算部15は、アンテナ10から距離R2の位置に第2航空機201が存在すると推定することができる。一方、第2航空機201の位置は二次元ではなく三次元であるため、一組の距離R3、距離R1+距離R2及び角度θ1のみから推定することはできない。したがって、演算部15は、蓄積データ記憶部16に記憶される少なくとも二組の異なるタイミングの距離R3、又は複数の異なる第1航空機200との距離R1+距離R2及び角度θ1を利用することで、第2航空機201の三次元の位置を推定することができる。
【0024】
演算部15は、第2航空機201の位置を推定すると、第2航空機201の推定位置を追随部17に出力する。
【0025】
ここで、探知距離R2は、受信電力Prにより決定される。一般的な航空機の信号の送信電力Ptは、500W(57dBm)程度である。したがって、図3に示すように、第1航空機200から第2航空機201までの到達電力はPt/(4π(R1)2)であり、第2航空機201のRCS(散乱断面積)をσとすると、アンテナまでの到達電力は、(Pt/(4π(R1)2))・(σ/(4π(R2)2))となる。また、アンテナ10のゲインをGrとすると、アンテナの受信効率はGrλ2/(4π)となる。その結果、アンテナ10の受信電力Prは、式(1)で求められる。
【0026】
Pr=(Pt/(4π(R1)2))・(σ/(4π(R2)2))・(Grλ2/(4π))…(1)
ここで、最小受信感度Smin<Prが受信可能な領域だとすると、モードS二次監視レーダ1で制御可能なパラメータはゲインGr及び最小受信感度Sminのみである。また、距離R2を伸ばすには、アンテナ10のゲインGrを上げるか、最小受信感度Sminを上げる必要がある。したがって、所望の距離R2を得るためには、最小受信感度Smin及びアンテナ10のゲインGrを最適にする必要がある。
【0027】
蓄積データ記憶部16に記憶される蓄積データは、デコーダ14でデコードされた拡張スキッタS1と、相関処理部13から入力した当該拡張スキッタS1に対応する反射信号S2の遅延時間と、当該反射信号S2を受信した際のアンテナの角度θ1とを含むデータである。
【0028】
蓄積データ記憶部16では、航空機の位置の推定に有効なデータのみ記憶していればよい。したがって、蓄積データでは、アンテナ10が信号受信に利用するビーム幅分のデータのみ含んでいる。また、演算部15は、ビーム幅外になったデータを蓄積データから削除する。具体的には、アンテナ10が15rpmで回転し、Σビーム幅が2.5°の場合、演算部15は、受信後、約28ms(60/15×2.5/360)経過したデータは、蓄積データからデータを削除する。
【0029】
追随部17は、第2航空機201の推定位置と、この推定位置のデータを入力すると、追随データ記憶部18から対応する航空機についての情報データを選択し、第2航空機201の位置を追随する。このとき、第1航空機200及び第2航空機201の移動方向を推定することができるときには、追随部17は、移動方向を求めて、追随データ記憶部18に記憶させてもよい。
【0030】
また、例えば、追随部17は、処理結果を表示装置19に出力して表示させたり、記憶装置20に出力して記憶させたりする。
【0031】
追随データ記憶部18に記憶される追随データは、モードS二次監視レーダで反射信号S2を利用して飛行経路を追随している第2航空機201に関するデータである。この反射信号S2を利用して追随する第2航空機201のモードSアドレスは把握できないため、追尾データでは、反射信号S2に含まれる拡張スキッタS1を送信した航空機のモードSアドレス及び位置情報とともに、演算部15で得られた第2航空機201の推定位置を含んでいる。また、追随部17で第1航空機200や第2航空機201の移動方向が求められたときには、移動方向を追加してもよい。
【0032】
なお、図1及び図3では、拡張スキッタS1を送信する航空機は第1航空機200の1機のみ存在する例で説明したが、拡張スキッタS1を送信する航空機が複数存在し、1機の航空機が複数の拡張スキッタS1を反射する場合もある。また、拡張スキッタS1を反射する航空機は第2航空機201の1機のみ存在する例で説明したが、拡張スキッタS1を反射する航空機が複数存在する場合もある。このように拡張スキッタS1を送信する航空機や反射する航空機が複数存在する場合、追随部17は、演算部15で位置が推定された複数の航空機について処理する。
【0033】
上述したように、実施形態に係る二次監視レーダ1では、拡張スキッタS1(Ωパターン)と拡張スキッタS1の反射信号S2(Σパターン)とを利用することで、拡張スキッタS1を反射した航空機の位置を把握することができる。すなわち、モードS二次監視レーダは、モードS二次監視レーダと信号の送受信を行うトランスポンダを有している航空機は、質問応答によって飛行を監視することができる。また、モードS二次監視レーダで拡張スキッタを受信して処理するようにすることで、拡張スキッタを送信するトランスポンダを有する航空機の飛行も把握することができる。一方、モードS二次監視レーダとの信号の送受信が可能なトランスポンダや拡張スキッタS1を送信するトランスポンダを有していない航空機については、飛行の把握が困難であったが、反射信号S2を利用することでこのようなトランスポンダを未搭載の航空機についても飛行を把握することができる。
【0034】
さらに、二次監視レーダ1では、質問信号を送信しなくても(電波発射機能を有しない場合でも)、運用することができる。
【0035】
上記のように、本発明を実施形態によって記載したが、この開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例および運用技術が明らかとなる。また、本発明はここでは記載していない様々な実施形態等を含むことは勿論である。
【符号の説明】
【0036】
10…アンテナ
11…受信部
111…局発
112,116,123…ミキサ
113,117,124…アンプ
114,118,125…フィルタ
115,119,126…ログアンプ
120…位相検波手段
121…OBA演算手段
122…加算器
13…相関処理部
14…デコーダ
15…演算部
16…蓄積データ記憶部
17…追随部
18…追随データ記憶部
19…表示装置
20…記憶装置
200…第1航空機
201…第2航空機
【技術分野】
【0001】
本発明の実施形態は、航空機から送信された信号の反射信号を受信するレーダ装置に関する。
【背景技術】
【0002】
航空機は、飛行の安全を図るため、質問信号や応答信号を送受信するモードS二次監視レーダ装置等のレーダ装置を利用して監視されている。また、航空機同士の衝突を防止するために航空機同士で位置情報を交換する放送型自動従属監視(ADS−B:Automatic Dependent Surveillance-Broadcast)も利用されている。
【0003】
一方、モードS二次監視レーダ装置と信号の送受信が可能な航空機ばかりでなく、モードS二次監視レーダと信号の送受信を行うトランスポンダを備えていない航空機もある。このような航空機の場合、地上のレーダ装置ではトランスポンダを搭載しない航空機の飛行を把握することが困難である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−10629号公報
【特許文献2】特開2000−137073号公報
【特許文献3】特開平5−142341号公報
【非特許文献】
【0005】
【非特許文献1】“Aeronautical Telecommunications,ANNEX10,VOLUMEIV”,Surveillance Radar and Collision Avoidance Systems,1996年7月,ICAO
【非特許文献2】“SSRモードS概説書”,平成14年12月,国土交通省航空局管制保安部無線課
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したように、モードS二次監視レーダでは、飛行を監視できない航空機が存在することがあった。
【課題を解決するための手段】
【0007】
本発明の実施形態に係るレーダ装置は、受信部と、相関処理部と、演算部とを備える。受信部は、アンテナを介して、第1航空機から送信された拡張スキッタをΩチャンネルで受信するとともに、当該拡張スキッタが第2航空機で反射した反射信号をΣチャンネル及びΔチャンネルで受信する。相関処理部は、受信部が受信した拡張スキッタと当該拡張スキッタの反射信号との遅延時間を求める。演算部は、受信部が受信した拡張スキッタと、当該拡張スキッタの反射信号を受信した際のアンテナの回転角度と、相関処理部で求められた遅延時間とを利用して、他の航空機の位置を推定する。
【図面の簡単な説明】
【0008】
【図1】実施形態に係るレーダ装置が受信する信号を説明する概略図である。
【図2】実施形態に係るレーダ装置の構成を説明するブロック図である。
【図3】図1のレーダ装置での演算を説明する概略図である。
【発明を実施するための形態】
【0009】
以下に、図面を用いて実施形態に係るレーダ装置について説明する。実施形態に係るレーダ装置は、航空機から送信された送信信号が他の航空機に反射した反射信号を受信して解析して航空機を監視する装置である。以下では、実施形態に係るレーダ装置が航空機との間で信号の送受信を行って航空機を監視するモードS二次監視レーダ装置に備えられているものとして説明するが、質問は送信せず、反射信号を利用して航空機を監視する機能のみを備えていても実現することができる。
【0010】
具体的には、図1に示すように、実施形態に係るモードS二次監視レーダのアンテナ10は、第1航空機200が送信した拡張スキッタS1を受信するとともに、拡張スキッタS1が他の航空機である第2航空機201を反射した反射信号S2を受信する。ここで、モードS二次監視レーダのアンテナ10は、INTパターン(Σパターン)300、モノパルスパターン(Δパターン)301、全周パターン(Ωパターン)302で信号を受信する。
【0011】
Σパターン300では、指向性があるが、信号の受信感度が高い。一方、Ωパターン302では、無指向性であるが、信号の受信感度が低い。また、反射信号S2は、拡張スキッタS1が第2航空機201で反射した信号であるため、拡張スキッタS1よりも電力が小さい。したがって、アンテナ10は、受信感度の低いΩパターン302では、第1航空機200が送信した拡張スキッタS1を受信することができるが、拡張スキッタS1より電力の小さい反射信号S2を受信することはできない。したがって、アンテナ10は、受信感度の高いΣパターン300やΔパターン301でのみ反射信号S2を受信することができる。
【0012】
図2に示すように、実施形態に係るモードS二次監視レーダ1は、アンテナ10を介してΣパターン、Δパターン、Σパターンの信号を受信する受信部11と、受信部11がΣパターンで受信した信号とΩパターンで受信した信号の相関を求める相関処理部13と、Ωパターンで受信した信号をデコードするデコーダ14と、受信部11の処理結果、相関処理部13の処理結果及びデコーダ14の処理結果を利用して航空機の位置を推定する演算部15と、航空機の情報を蓄積して記憶する蓄積データ記憶部16と、演算部15の処理結果を利用して航空機を追随する追随部17と、追随する航空機の情報を記憶する追随データ記憶部18と、追随部17の処理結果を表示する表示装置19と、追随部17の処理結果を記憶する記憶装置20とを備えている。
【0013】
なお、モードS二次監視レーダ1は、一般的なモードS二次監視レーダが備えるような、質問信号を送信する処理部、受信したモードS信号を解析処理する処理部、受信したATCRBS信号を解析処理する処理部、解析されたモードS信号及びATCRBS信号の解析結果からレポートを生成する処理部等を備えているが、図2では省略している。
【0014】
受信部11は、一般的なモードS二次監視レーダの受信部であって、図2に示すように、アンテナ10を介して入力するΣパターンの信号と局発111からの信号とを混合するミキサ112と、混合された信号を増幅するアンプ113と、増幅された信号を帯域調整するフィルタ114と、帯域調整された信号を対数調整(圧縮又は拡張)するログアンプ115と、アンテナ10を介して入力するΔパターンの信号と局発111からの信号とを混合するミキサ116と、混合された信号を増幅するアンプ117と、増幅された信号を帯域調整するフィルタ118と、帯域調整された信号を対数調整(圧縮又は拡張)するログアンプ119と、Σパターンの信号とΔパターンの信号を利用して信号の位相の符号を判定する位相検波手段120と、判定された位相の符号を利用して信号のビーム内角度を決定するOBA演算手段121と、決定したビーム内角度とアンテナ10から入力するアンテナ10の機械的指向角を加算して絶対値であるアンテナ10の回転角度を求める加算器122と、アンテナ10を介して入力するΩパターンの信号と局発111からの信号とを混合するミキサ123と、混合された信号を増幅するアンプ124と、増幅された信号を帯域調整するフィルタ125と、帯域調整された信号を対数調整(圧縮又は拡張)するログアンプ126とを備えている。
【0015】
相関処理部13は、ログアンプ115から出力されたΣパターンの信号と、ログアンプ126から出力されたΩパターンの信号とを入力し、相関を求めてΣパターンの信号とΩパターンの信号との遅延量である時間的相関を求める。すなわち、図1に示す例で第1航空機200が送信した拡張スキッタS1は、Ωパターン302で受信される。一方、第2航空機201で拡張スキッタS1が反射した反射信号S2は、Σパターン300で受信される。また、反射信号S2は拡張スキッタS1が反射した信号であるため、拡張スキッタS1の内容と反射信号S2の内容は同一である。したがって、相関処理部13は、Σパターンの信号とΩパターンの信号とから同一信号の時間的相関を求めることで、拡張スキッタS1受信から反射信号S2受信までの遅延時間を求めることができる。
【0016】
デコーダ14は、ログアンプ126から入力したΩパターンの信号を入力し、デコードする。すなわち、デコーダ14は、第1航空機200が送信した拡張スキッタS1をデコードする。したがって、デコーダ14のデコード結果には、第1航空機200のモードSアドレス、位置情報等が含まれる。
【0017】
演算部15は、受信部11からアンテナ10の回転角度を入力し、相関処理部13から時間的相関を入力し、デコーダ14からΩパターンの信号のデコード結果を入力すると、入力したデータ及び時刻発生手段21で発生した時刻を蓄積データ記憶部16の蓄積データに追加するとともに、蓄積データから第1航空機200の過去のデータを抽出して利用することで拡張スキッタS1を反射した第2航空機201の位置を推定する。ここで、受信部11、相関処理部13及びデコーダ14における処理に要する時間は把握することができるため、演算部15は、時刻発生手段21から入力する時刻を利用して信号を受信した時刻を求めることができる。
【0018】
拡張スキッタS1を送信した第1航空機200の位置情報は、拡張スキッタS1に含まれているため、モードS二次監視レーダ1で把握することができる。一方、第2航空機201で反射された反射信号S2に含まれている位置情報は第1航空機200の位置情報であって、第2航空機201の位置情報は含まれていないため、モードS二次監視レーダ1は把握することができない。したがって、演算部15は、得られた情報から、第2航空機201の位置を推定する。
【0019】
例えば、アンテナ10、第1航空機200、第2航空機201の位置関係は、図3に示すような三角形で表される。図3は、第1航空機200と第2航空機201間を距離R1、第2航空機201とアンテナ10間を距離R2、第1航空機200とアンテナ10間を距離R3とし、アンテナ10と第1航空機200及び第2航空機201で形成する角度をθ1とした例である。
【0020】
まず、演算部15は、第1航空機200とアンテナ10の位置から、距離R3を求める。すなわち、アンテナ10は固定であるため、演算部15は、予めアンテナ10の位置を把握している。また、第1航空機200が送信した拡張スキッタS1は第1航空機200の位置を含んでいることから、演算部15は、デコーダ14のデコード結果から第1航空機200の位置を把握することができる。
【0021】
また、演算部15は、距離R3と、拡張スキッタS1の受信から反射信号S2の受信までの遅延時間とから、「距離R1+距離R2」を求める。すなわち、演算部15は、相関処理部13の求めた時間的相関から、拡張スキッタS1の受信から反射信号S2の受信までの遅延時間を把握することができる。この遅延時間と距離R3とを利用して、演算部15は、距離R1+距離R2を求める。
【0022】
さらに、演算部15は、加算器122から、Σパターンの信号とΔパターンの信号を利用したモノパルス測角とアンテナ10の回転角度θを利用して求められた第2航空機201の精密な方位角度θ1を入力する。
【0023】
その後、演算部15は、距離R3と、距離R1+距離R2と、角度θ1とから、距離R2を求める。ここで、演算部15は、アンテナ10から距離R2の位置に第2航空機201が存在すると推定することができる。一方、第2航空機201の位置は二次元ではなく三次元であるため、一組の距離R3、距離R1+距離R2及び角度θ1のみから推定することはできない。したがって、演算部15は、蓄積データ記憶部16に記憶される少なくとも二組の異なるタイミングの距離R3、又は複数の異なる第1航空機200との距離R1+距離R2及び角度θ1を利用することで、第2航空機201の三次元の位置を推定することができる。
【0024】
演算部15は、第2航空機201の位置を推定すると、第2航空機201の推定位置を追随部17に出力する。
【0025】
ここで、探知距離R2は、受信電力Prにより決定される。一般的な航空機の信号の送信電力Ptは、500W(57dBm)程度である。したがって、図3に示すように、第1航空機200から第2航空機201までの到達電力はPt/(4π(R1)2)であり、第2航空機201のRCS(散乱断面積)をσとすると、アンテナまでの到達電力は、(Pt/(4π(R1)2))・(σ/(4π(R2)2))となる。また、アンテナ10のゲインをGrとすると、アンテナの受信効率はGrλ2/(4π)となる。その結果、アンテナ10の受信電力Prは、式(1)で求められる。
【0026】
Pr=(Pt/(4π(R1)2))・(σ/(4π(R2)2))・(Grλ2/(4π))…(1)
ここで、最小受信感度Smin<Prが受信可能な領域だとすると、モードS二次監視レーダ1で制御可能なパラメータはゲインGr及び最小受信感度Sminのみである。また、距離R2を伸ばすには、アンテナ10のゲインGrを上げるか、最小受信感度Sminを上げる必要がある。したがって、所望の距離R2を得るためには、最小受信感度Smin及びアンテナ10のゲインGrを最適にする必要がある。
【0027】
蓄積データ記憶部16に記憶される蓄積データは、デコーダ14でデコードされた拡張スキッタS1と、相関処理部13から入力した当該拡張スキッタS1に対応する反射信号S2の遅延時間と、当該反射信号S2を受信した際のアンテナの角度θ1とを含むデータである。
【0028】
蓄積データ記憶部16では、航空機の位置の推定に有効なデータのみ記憶していればよい。したがって、蓄積データでは、アンテナ10が信号受信に利用するビーム幅分のデータのみ含んでいる。また、演算部15は、ビーム幅外になったデータを蓄積データから削除する。具体的には、アンテナ10が15rpmで回転し、Σビーム幅が2.5°の場合、演算部15は、受信後、約28ms(60/15×2.5/360)経過したデータは、蓄積データからデータを削除する。
【0029】
追随部17は、第2航空機201の推定位置と、この推定位置のデータを入力すると、追随データ記憶部18から対応する航空機についての情報データを選択し、第2航空機201の位置を追随する。このとき、第1航空機200及び第2航空機201の移動方向を推定することができるときには、追随部17は、移動方向を求めて、追随データ記憶部18に記憶させてもよい。
【0030】
また、例えば、追随部17は、処理結果を表示装置19に出力して表示させたり、記憶装置20に出力して記憶させたりする。
【0031】
追随データ記憶部18に記憶される追随データは、モードS二次監視レーダで反射信号S2を利用して飛行経路を追随している第2航空機201に関するデータである。この反射信号S2を利用して追随する第2航空機201のモードSアドレスは把握できないため、追尾データでは、反射信号S2に含まれる拡張スキッタS1を送信した航空機のモードSアドレス及び位置情報とともに、演算部15で得られた第2航空機201の推定位置を含んでいる。また、追随部17で第1航空機200や第2航空機201の移動方向が求められたときには、移動方向を追加してもよい。
【0032】
なお、図1及び図3では、拡張スキッタS1を送信する航空機は第1航空機200の1機のみ存在する例で説明したが、拡張スキッタS1を送信する航空機が複数存在し、1機の航空機が複数の拡張スキッタS1を反射する場合もある。また、拡張スキッタS1を反射する航空機は第2航空機201の1機のみ存在する例で説明したが、拡張スキッタS1を反射する航空機が複数存在する場合もある。このように拡張スキッタS1を送信する航空機や反射する航空機が複数存在する場合、追随部17は、演算部15で位置が推定された複数の航空機について処理する。
【0033】
上述したように、実施形態に係る二次監視レーダ1では、拡張スキッタS1(Ωパターン)と拡張スキッタS1の反射信号S2(Σパターン)とを利用することで、拡張スキッタS1を反射した航空機の位置を把握することができる。すなわち、モードS二次監視レーダは、モードS二次監視レーダと信号の送受信を行うトランスポンダを有している航空機は、質問応答によって飛行を監視することができる。また、モードS二次監視レーダで拡張スキッタを受信して処理するようにすることで、拡張スキッタを送信するトランスポンダを有する航空機の飛行も把握することができる。一方、モードS二次監視レーダとの信号の送受信が可能なトランスポンダや拡張スキッタS1を送信するトランスポンダを有していない航空機については、飛行の把握が困難であったが、反射信号S2を利用することでこのようなトランスポンダを未搭載の航空機についても飛行を把握することができる。
【0034】
さらに、二次監視レーダ1では、質問信号を送信しなくても(電波発射機能を有しない場合でも)、運用することができる。
【0035】
上記のように、本発明を実施形態によって記載したが、この開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例および運用技術が明らかとなる。また、本発明はここでは記載していない様々な実施形態等を含むことは勿論である。
【符号の説明】
【0036】
10…アンテナ
11…受信部
111…局発
112,116,123…ミキサ
113,117,124…アンプ
114,118,125…フィルタ
115,119,126…ログアンプ
120…位相検波手段
121…OBA演算手段
122…加算器
13…相関処理部
14…デコーダ
15…演算部
16…蓄積データ記憶部
17…追随部
18…追随データ記憶部
19…表示装置
20…記憶装置
200…第1航空機
201…第2航空機
【特許請求の範囲】
【請求項1】
アンテナを介して、第1航空機から送信された拡張スキッタをΩチャンネルで受信するとともに、当該拡張スキッタが第2航空機で反射した反射信号をΣチャンネル及びΔチャンネルで受信する受信部と、
前記受信部が受信した拡張スキッタと当該拡張スキッタの反射信号との遅延時間を求める相関処理部と、
前記受信部が受信した拡張スキッタと、当該拡張スキッタの反射信号を受信した際の前記アンテナの回転角度と、前記相関処理部で求められた遅延時間とを利用して、前記他の航空機の位置を推定する演算部と、
を備えることを特徴とするレーダ装置。
【請求項1】
アンテナを介して、第1航空機から送信された拡張スキッタをΩチャンネルで受信するとともに、当該拡張スキッタが第2航空機で反射した反射信号をΣチャンネル及びΔチャンネルで受信する受信部と、
前記受信部が受信した拡張スキッタと当該拡張スキッタの反射信号との遅延時間を求める相関処理部と、
前記受信部が受信した拡張スキッタと、当該拡張スキッタの反射信号を受信した際の前記アンテナの回転角度と、前記相関処理部で求められた遅延時間とを利用して、前記他の航空機の位置を推定する演算部と、
を備えることを特徴とするレーダ装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−83542(P2013−83542A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−223573(P2011−223573)
【出願日】平成23年10月11日(2011.10.11)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月11日(2011.10.11)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]