
ロッド整復装置
ロッド整復装置は、縦軸を規定する筐体を備える。この筐体は、遠位に延伸する第1アームおよび第2アームを有する。各アームの遠位端は、骨アンカーに取り外し可能に取り付けられるように構成されている。アンビルは、筐体の第1アームおよび第2アームと動作可能に結合し、骨アンカー内への整復ロッドの挿入を容易にするために、縦軸に沿って位置変え可能である。アンビルおよび各アームは、開き位置と閉じ位置との間で位置付け可能である。
【発明の詳細な説明】
【技術分野】
【0001】
(関連出願の相互参照)
本出願は、2008年8月7日に出願された米国仮出願番号第61/086,957号、および2008年6月11日に出願された米国仮出願番号第61/131,645号の優先権を主張する。これらの内容全体は、参照により本明細書に組み込まれる。
【背景技術】
【0002】
本開示は、身体の骨および関節を安定させ、固定するための整形外科手術用の装置に関する。詳細には、本開示は制御された、整然とした方法で、骨アンカー内に脊椎ロッドを整復するための手動で操作される装置に関する。
【0003】
脊柱は、ヒトの身体に支持を提供し、脊髄および神経の保護を提供する骨および結合組織からなる複雑なシステムである。ヒトの脊椎は、生まれた時から33個の椎骨が備わっており、老人になるにつれ24個になる。各一対の椎骨の間には椎骨板があり、該椎骨板が隣接する椎骨の間の空間を維持し、圧迫、屈曲、回転という負担および動きにおいて、クッションとして役割を果たす。
【0004】
脊柱が生涯で経験し得る、さまざまな疾患、病気、およびさまざまな種類の損傷が存在する。限定されるものではないが、脊柱側弯症、脊柱後弯症、過剰な脊柱前弯症、脊椎すべり症、椎間板ヘルニアまたは椎間板破裂、椎間板変性症、椎体骨折、および腫瘍の問題を含み得る。上述の病態のうちいずれかの病態を患う人物は、典型的に強烈な痛みまたは衰弱化する苦痛を経験し、しばしば神経機能の低下を経験する。
【0005】
上述した病態のいずれかの病態に多い解決策の1つは、脊椎固定術として知られる外科処置を伴う。脊椎固定術の処置は、椎間板または関節において安定させるか、または動きを取り除くために、2つ以上の椎体を固定することを伴う。これを実現するために、天然または人工の骨が、スペーシング装置とともに、脊椎板の一部分または全てのいずれかを置換して、固定した骨の支柱を形成し、機械的な金属機器によって安定される。
【0006】
脊柱を固定させるために使用される機械的な金属機器は、一般的に、一式の骨ネジ/アンカー、および金属ロッドまたは金属プレートを含む。脊椎外科手術が後方で行われるとき、骨アンカーを椎体内に設置し、次いで隣接する椎体の間に金属ロッドを接続するのが一般的なやり方である。脊椎外科手術が前方で行われるとき、薄い金属プレートを直接椎体に接着させ、1つ以上の骨ネジを使用して各々椎骨レベルまで固定するのが一般的なやり方である。
【0007】
骨アンカーの受入れ用スロット内に脊椎ロッドを適切に挿入し、次いでその接続ロッドを定位置に締め付ける工程では、外科医にとって、多くの器具を使用し、膨大な時間および尽力を費やすことがしばし必要になる。複数の隣接する椎骨の骨アンカーが脊椎ロッドによりしっかりと接続されるべきときに、骨アンカーの頭部内にロッドを挿入し、次いで各個別の骨アンカーに対して定位置にロッドを締め付けるという工程を繰り返すことは困難であり、厄介であり、時間を浪費し得る。さらに、連続する骨アンカーの各々に接続するロッドの配列は、処置の間に調節することが必要となるかもしれず、それ故、連続して配列された骨アンカーの各々の頭部内にロッドを整復でき、必要に応じて簡単に調節でき、それにより外科医が労力を最小限にとどめ、余分な時間をとどめるように工程を促進できる装置および方法の提供が所望されている。
【発明の概要】
【課題を解決するための手段】
【0008】
本開示は、縦軸を規定し、かつ、遠位に延伸する第1アームおよび第2アームを有する筐体を備えるロッド整復装置を目的とする。筐体は、そこを通って縦方向に延伸する筐体の穴を備える。筐体の穴は、骨アンカーと係合するためのドライバーを受入れるように構成されている。ロッド整復装置は、ロッド整復装置および骨アンカーを骨内に前進させるドライバーと係合するように構成されている。
【0009】
筐体の第1アームおよび第2アームは、第1位置と少なくとも1つの第2位置との間で位置付け可能である。アームは、少なくとも1つの位置において互いに平行である。アームの遠位端は、骨アンカーと取り外し可能に取り付けられるように構成されている。アームの遠位端は、骨アンカーと係合するために、少なくとも1つの把持機構を備える。
【0010】
アンビルは、筐体の第1アームおよび第2アームと動作可能に結合し、骨アンカーへの脊椎ロッドの挿入を容易にするために縦軸に沿って位置変え可能である。アンビルは、筐体の第1アームおよび第2アームを受入れるために、第1穴および第2穴を備える。第1穴および第2穴は、互いに平行である。アンビルは、第1位置と少なくとも1つの第2位置との間で位置付け可能である。アンビルは、筐体から遠位の所定の距離にアンビルを移動させることにより、アームを平行位置に位置付けるように構成されている。アンビルは、そこを通って縦方向に延伸するアンビルの穴を備える。アンビルの穴は、骨アンカーと係合するためのドライバーを受入れるように構成されている。
【0011】
一実施形態では、アンビルは、その遠位端に配置されたアンビルの支柱を備える。
【0012】
一実施形態では、ロッド整復装置は、アンビルを前進させる整復ネジを備える。この実施形態では、整復ネジは、その遠位端に配置された係合用スプールを備え、ここで係合用スプールは、アンビル頭部と機械的に協同して配置される。アンビル頭部は、少なくとも1つの相互接続ピンを介して係合用スプールに連結される。スラスト軸受は、係合用スプールおよびアンビル頭部と動作可能に結合し、スラスト軸受はそれらの間に配置される。アンビル頭部は曲線面を有する。
【0013】
本開示の別の態様では、脊椎支持を提供する方法は、縦軸を規定し、かつ、遠位に延伸する第1アームおよび第2アーム有する筐体を有するロッド整復装置を提供することであり、ここでアームの遠位端が骨アンカーに取り外し可能に取り付けられるように構成されており、アンビルが筐体の第1アームおよび第2アームと動作可能に結合し、骨アンカーへの脊椎ロッドの挿入を容易にするために縦軸に沿って位置変え可能であり、アンビルおよび各アームが、第1位置と少なくとも1つの第2位置との間で位置付け可能である。方法はさらに、骨アンカーにロッド整復装置を締め付けることと、筐体の第1アームと第2アームとの間にロッドを設置することと、ロッド整復装置を用いて骨アンカー内にロッドを整復することと、骨アンカーにロッドを固定することとを含む。方法は、少なくとも1つの椎体に、少なくとも1つの骨アンカー、および少なくとも1つのロッドを取り付けることも含む。
【0014】
本開示の別の態様では、脊椎支持を提供するための方法は、各ロッド整復装置が縦軸を規定し、かつ、遠位に延伸する第1アームおよび第2アームを有する筐体を備える、複数のロッド整復装置を提供することであり、ここでアームの遠位端が骨アンカーに取り外し可能に取り付けられるように構成されおり、アンビルが筐体の第1アームおよび第2アームと動作可能に結合し、骨アンカー内へのロッドの挿入を容易にするために縦軸に沿って位置変え可能であり、アンビルおよび各アームが、第1位置と少なくとも1つの第2位置との間で位置付け可能である複数のロッド整復装置を提供することと、複数の骨アンカーを提供することとを含む。方法はさらに、複数の骨アンカーの骨アンカーに各ロッド整復装置を締め付けることと、各ロッド整復装置の第1アームと第2アームとの間にロッドを設置することと、ロッド整復装置を用いて複数の骨アンカー内にロッドの一部分を連続的に整復することと、複数の骨アンカーにロッドの一部分を連続的に固定することとを含む。本開示の上述のこと、他の態様、および特徴は、添付の図面と併せると、以下の詳細な説明を踏まえてより明らかになるであろう。
【図面の簡単な説明】
【0015】
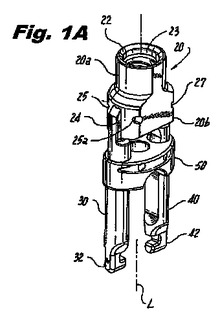
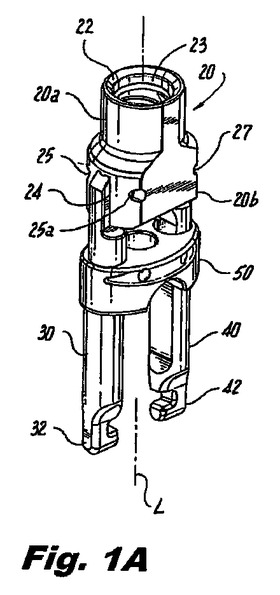
【図1A】本開示に基づく、一実施形態に係るロッド整復装置の斜視図である。
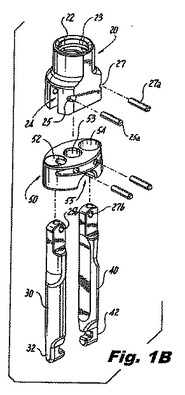
【図1B】図1Aのロッド整復装置の、分離された部品の斜視図である。
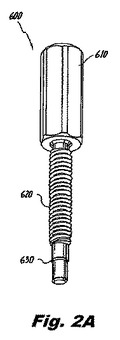
【図2A】本開示に基づく、一実施形態に係る整復ネジの斜視図である。
【図2B】図2Aの整復ネジの上面図である。
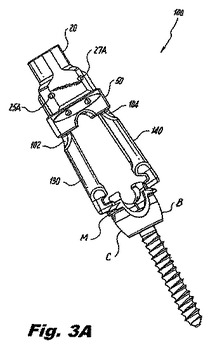
【図3A】骨アンカー・アセンブリと係合する前の第1位置において示される、別の実施形態に係るロッド整復装置の斜視図である。
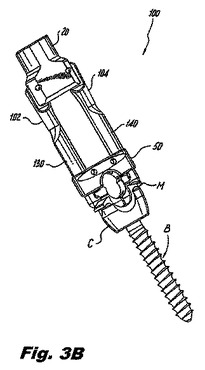
【図3B】ロッド整復装置が骨アンカー・アセンブリと係合した第2位置において示される、図3Aのロッド整復装置および骨アンカー・アセンブリの斜視図である。
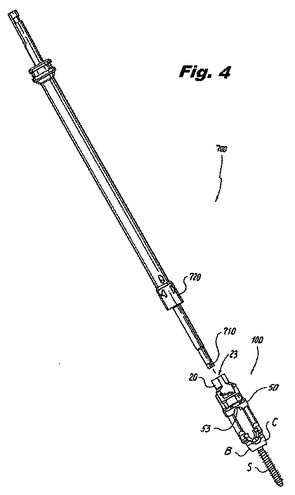
【図4】図3Aおよび図3Bのロッド整復装置および骨アンカー・アセンブリを係合させるように位置付けられた、一実施形態に係るドライバーの斜視図である。
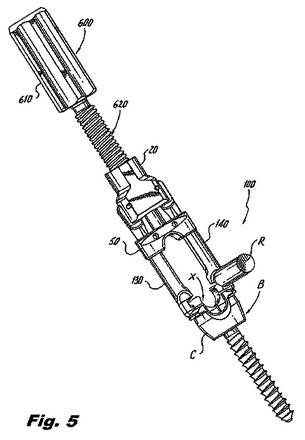
【図5】図3Aおよび図3Bのロッド整復装置および骨アンカー・アセンブリを係合させている、図2Aおよび図2Bの整復ネジの斜視図である。
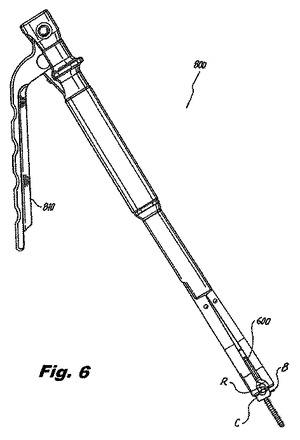
【図6】図5に示されるアセンブリと係合する固定器具の斜視図である。
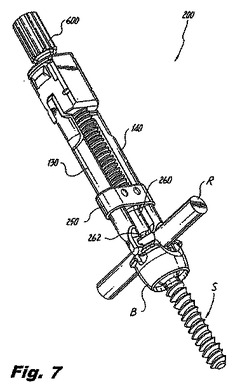
【図7】ロッド整復装置のアンビルの遠位側に形成された六角端を有する支柱を示す、図2Aおよび図2Bの整復ネジ、並びに図3Aから図6の骨アンカーを組み合わせた、一実施形態に係るロッド整復装置の斜視図である。
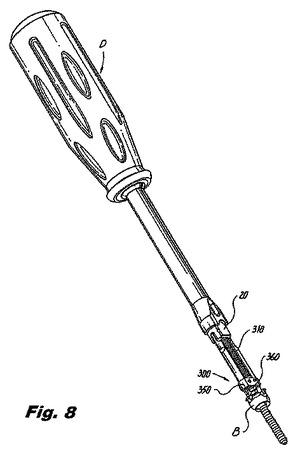
【図8】図3Aから図7のロッド整復装置および骨アンカーの別の実施形態に組み立てられた駆動用器具の斜視図である。
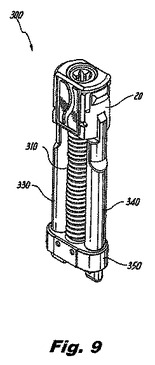
【図9】図8のロッド整復装置の斜視図である。
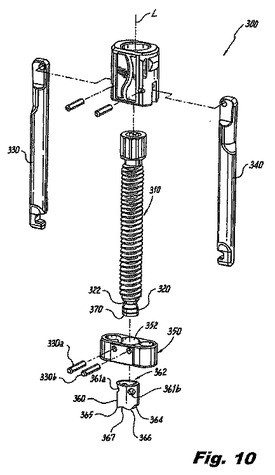
【図10】図8および図9のロッド整復装置の、分離された部品の斜視図である。
【発明を実施するための形態】
【0016】
添付の図面を参照し、本明細書において本開示の特定の実施形態を説明する。図面に示されるように、かつ以下の説明を通して説明するように、また対象についての関連位置の参照の際に一般的であるように、「近位」という用語は、使用者に近い装置の端部を指し、「遠位」という用語は、使用者から離れた装置の端部を指す。以下の説明では、不必要な細部において本開示を曖昧にさせないように、周知の機能または構造は詳細に説明しない。
【0017】
次に図面を参照するが、同様の参照番号は、複数の図を通して同一の、または実質的に類似する部品とみなし、図1Aによりロッド整復装置10を例証する。本開示によれば、ロッド整復装置10は、かつ、遠位に延伸する第1アーム30および第2アーム40を有する筐体20と、第1アーム30および第2アーム40と動作可能に関連付いたアンビル50を備える。
【0018】
図1Aを引き続き参照すると、筐体20は、縦軸「L」を規定し、近位端20aおよび遠位端20bを備える。近位端20aは、曲線になり得る頂面22、および縦方向の開口21を備える。筐体20は、そこを通って延伸する筐体の穴23を備える。縦方向の開口21および筐体の穴23は、複数の器具「I」(例えば、以下のさらなる詳細で説明する整復ネジ(図2Aおよび図2B))により係合され得る。さらに、筐体20は、第1切欠き部24、および実質的に第1切欠き部24に類似するが、筐体20の対向する側面に規定された第2切欠き部(不図示)を備える。第1切欠き部24および第2切欠き部は、第1アーム30および第2アーム40それぞれを受入れるように構成されている。第1チャネル25および第2チャネル27は、それぞれがそこを通る第1アームピン25aおよび第2アームピン27a(図3A)を受入れるために、筐体20の対向する側面に、縦軸「L」を横切り、筐体20を通って切り取られている。第2アームピン27aは、第1アームピン25aと同じものであり、各ピンは、筐体20に対して第1アーム30および第2アーム40それぞれを支持するように構成されている。そのようにして、第1アーム30および第2アーム40は、筐体20に対して旋回することができる。
【0019】
次に図1Aおよび図1Bを参照すると、第1アーム30は、第1切欠き部24内に位置付けられ、第2アーム40は、第2切欠き部内に位置付けられる。第1アーム30および第2アーム40は、アーム30およびアーム40の近位端に配置されたピン穴25bおよびピン穴27bを介してアームピン25aおよびアームピン27aを受入れる。第1アーム30および第2アーム40は、筐体20に旋回可能に取り付けられ、ここでアーム30およびアーム40は、筐体20に対して所定の角度を経て旋回し得る。従って、アーム30およびアーム40は、開き位置および閉じ位置を含む複数の位置を通して、移動可能であり、整復可能である。各アーム30およびアーム40の遠位端は、把持機構32および把持機構42になっており、対向する把持機構32および把持機構42を備えて鏡像配置されたフックまたは鉤爪であり得る。各把持機構32および把持機構42は、骨アンカー「B」(図3Aおよび図3Bを参照)の優遇的な嵌合機構と取り外し可能に取り付けられるように構成されている。各アーム30およびアーム40は、アンビル50がそこに沿って容易に位置変えできるように、内側の方を向いたカット部分44を備える。
【0020】
重ねて図1Aおよび図1Bを参照すると、アンビル50は、骨アンカー「B」(図3Aおよび図3Bを参照)への脊椎ロッド「R」(図5を参照)の挿入を容易にするために、開き位置から閉じ位置まで第1アーム30および第2アーム40に沿って、かつ縦軸「L」に沿って位置変えするための平行な第1アーム用の穴52および第2アーム用の穴54を備える。アンビル50は、そこを通って延伸する縦方向の開口51およびアンビルの穴53を備える。縦方向の開口51およびアンビルの穴53は、複数の器具「I」(例えば、以下のさらなる詳細で説明する整復ネジ600(図2Aおよび図2B)により係合され得る。弧状のチャネル55は、脊椎ロッド「R」(図5を参照)と係合するために、縦軸「L」を横切ってアンビル50の遠位端に沿って配置される。開き位置では、アーム30およびアーム40は離れており、アンビル50は筐体20の近位に配置されている。アンビル50が遠位に移動すると、アーム30およびアーム40は互いに向かって旋回し、平行になり、そして閉じ位置に位置付けられる。開き位置から閉じ位置へのアンビル50並びにアーム30およびアーム40の位置変えは、アンビル50がアーム30およびアーム40に沿った距離の最初の1/4内にある筺体20から、筐体20からアーム30およびアーム40の遠位端まで測定される縦軸の下方まで遠位に位置変えしたときに生じる。特に、ロッド整復装置10は、アーム30およびアーム40が平行になり、アンビル50が筐体20からおよそ25%位置変えしたときに「閉じた」とみなされる。ロッド整復装置10がその閉じ位置にあるとき、把持機構32および把持機構42、例えばフックまたは鉤爪の形状が、ロッド整復装置10を骨アンカー「B」に取り外し可能に取り付けながら、骨アンカー「B」の優遇的に嵌合する凹部「M」(図3Aおよび図3B)と係合する。ロッド整復装置10が骨アンカー「B」に取り外し可能に取り付けられると、2つのピースが単一装置として役割を果たし、協同して生体構造内に導入され得る。
【0021】
図3Aおよび図3Bに例示されるように、別の実施形態のロッド整復装置100が、骨アンカー「B」と係合する開き位置の状態で示される。ロッド整復装置100は、ロッド整復装置10と実質的に類似するが、ロッド整復装置100は、アンビル50が開き位置(図3A)から閉じ位置(図3B)までそこに沿って位置変えできるように、第1アーム130および第2アーム140の近位端に配置された、外側の方を向いた第1カット部分102および第2カット部分104を備える。
【0022】
図4で示されるように、駆動用端部710、例えば六角端を有するドライバー700は、筐体20を通って縦方向に配置された筐体の穴23、およびアンビル50を通って縦方向に配置されたアンビルの穴53を突き抜け得る。駆動用端部710に加え、ドライバー700は、筐体20と係合するように構成されたスリーブ720を備える。スリーブ720が筐体20と係合すると、ドライバー700は、ロッド整復装置10および骨アンカー「B」にトルクを送る。操作中、使用者は、骨アンカー「B」を骨内に挿入し、骨アンカー「B」の鞍部「X」内に脊椎ロッド「R」を整復するためにドライバー700を用いてよい。
【0023】
操作の一例示的な方法では、使用者は、骨に近接して骨アンカー「B」を位置付け、筐体20の近位端20aを覆ってスリーブ720を設置する。さらに、使用者は、駆動用端部710が骨アンカー「B」の軸部分「S」と係合するまで、駆動用端部710を筐体の穴23およびアンビルの穴53を通って突き抜けさせる。次いで、ねじり力がドライバー700に適用される。ねじり力の印加により、ロッド整復装置10は、骨アンカー「B」を骨内に遠位に前進させるように骨アンカー「B」とともに回転する。
【0024】
骨アンカー「B」がその所望の位置まで前進すると、ドライバー700および/または駆動用チューブ800は取り除かれてよく、整復ネジ600(図2Aおよび図2B)が、筐体の穴23(図5)およびアンビルの穴53を通って挿入され得る。図2Aから図2Cおよび図5で示されるように、整復ネジ600は、整復ネジ600を駆動させるためにその近位端に配置された頭部610、筐体の穴23およびアンビルの穴53を通って整復ネジ600を前進させるための、遠位端のネジ山部分620、並びにネジ山部分620の遠位に位置付けられた肩部630を有する。図5の例示から、脊椎ロッド「R」は、ロッド整復装置100の2つのアーム130とアーム140との間にも、骨アンカー「B」の鞍部「X」の上にも導入され得る。整復ネジ600のネジ山は、ねじり力が整復ネジ600に印加されると、整復ネジ600の制御された直線の前進が適度に、徐々に生じるように、筐体の穴23(図1Aを参照)の内側のネジ山と係合する。整復ネジ600は、前進しつつ、肩部630がアンビル50に係合するまでアンビルの穴53を突き抜ける。この位置で肩部630は、アンビル50に静止し、整復ネジ600がいつでもアンビル50を駆動させることができる。整復ネジ600の遠位へのさらなる前進が、第1アーム30および第2アーム40に沿ってアンビル50を遠位に駆動させる。最終的に、アンビル50の弧状のチャネル55は、脊椎ロッド「R」と係合する。弧状のチャネル55が脊椎ロッド「R」と係合すると、整復ネジ600の遠位へのさらなる前進により、アンビル50が骨アンカー「B」の鞍部「X」内に脊椎ロッド「R」を遠位に駆動させる。
【0025】
脊椎ロッド「R」が骨アンカー「B」の鞍部「X」に完全に整復されるか、または据付けられた後、固定器具である駆動用チューブ800(図6)は、アセンブリ全体の頭上に設置され得る。駆動用チューブ800のレバー810を握ることにより、駆動用チューブ800が骨アンカー「B」と係合し、整復ネジ600および脊椎ロッド「R」を下方に押しやりながら骨アンカー「B」の連結器「C」を引き上げ、それにより患者に力を加えること無く、骨アンカー「B」内に脊椎ロッド「R」を完全に固定する。レバー810を離すことにより骨アンカー「B」から駆動用チューブ800が外れ、そうして駆動用チューブ800は取り除かれ得る。次いで整復ネジ600がはずされてよく、後方に寄ったアンビル50、並びにロッド整復装置10および100は、骨アンカー「B」からバラされてよい。駆動用チューブ800は、脊椎ロッド「R」に骨アンカー「B」を完全またはある程度固定してよい。脊椎ロッド「R」は、脊椎ロッド「R」に沿った隣接する骨アンカー「B」の調節を促進させるため、骨アンカー「B」に対してある程度固定されてよい(すなわち、鞍部「X」に脊椎ロッド「R」を整復する(脊椎ロッド「R」は縦軸「L」を横切って移動することができる))か、または完全に固定され得る(すなわち、脊椎ロッド「R」が整復された後に鞍部「X」まで連結器「C」を引き上げる)。脊椎ロッド「R」に沿った多様な骨アンカー「B」を有する構築物が考慮される。駆動用チューブ800は、1つ以上の既成の脊椎ロッド「R」および骨アンカー「B」構築物を組み立てた後に、1つ以上の脊椎ロッド「R」を固定するために使用されてよい。1つ以上の脊椎ロッド「R」が1つ以上の骨アンカー「B」内に整復され、適切な設置のために調節された後、各脊椎ロッド「R」および各骨アンカー「B」は、本明細書で先に説明したような定位置に完全に固定することができる。従って、各脊椎ロッド「R」および骨アンカー「B」構築物は、本明細書で先に説明したような駆動用チューブ800を使用して、ある程度または完全に(個別的または協同的に)固定されてよい。それにより、骨アンカー「B」および脊椎ロッド「R」構築物は、患者に永続的な脊椎支持を提供し得る。
【0026】
別の実施形態のロッド整復装置200(図7)では、アンビル250は、その遠位端に配置されたアンビルの支柱260を備えて構成されている。アンビルの支柱260は、六角(ヘクサロビュラ)の遠位端262を有する。ロッド整復装置200のこの実施形態により、六角の遠位端262が骨アンカー「B」のネジの胴部「S」と嵌合しながら、アンビル250が、アーム130およびアーム140を骨アンカー「B」に締め付けるために遠位に移動することができる。次いで、図8に示されるような駆動用器具「D」は、駆動用器具「D」の近位端から骨内に、骨アンカー「B」のネジ胴部「S」を駆動させるように使用され得る。駆動用器具「D」は、筐体20と係合し、ロッド整復装置300および骨ロッド整復装置300に接着されたアンカー「B」にトルクを送るように構成された遠位端を備える。操作中、使用者は、骨アンカーの鞍部「X」内に脊椎ロッド「R」を整復する前後に、骨アンカー「B」を骨内に埋め込んでよい。骨アンカー「B」を埋め込むために、使用者はまず、筐体20を覆って駆動用器具「D」の遠位端を設置し、次いで駆動用器具「D」を遠位に前進させながら駆動用器具「D」を回転させる。回転の間、駆動用器具「D」の遠位端は、ロッド整復装置300および骨アンカー「B」にトルクを送る。その結果、骨アンカー「B」は徐々に骨内へと導入される。
【0027】
骨アンカー「B」を骨内に埋め込む前後に、使用者は、骨アンカーの鞍部「X」内に脊椎ロッド「R」を整復させる。脊椎ロッドの整復を実現させるため、アンビル250のアンビルの支柱260は近位方向に後退され、脊椎ロッド「R」がロッド整復装置200のアーム130とアーム140との間に設置される。次いで、使用者は、縦軸「L」の周囲で整復ネジ600を回転させ、それによりアンビルの支柱260を遠位に駆動させる。アンビルの支柱260が遠位に移動しながら、アンビルの支柱260の六角の遠位端262が骨アンカー「B」に脊椎ロッド「R」を整復させつつ脊椎ロッド「R」を遠位に推進させる。
【0028】
代替え的な実施形態のロッド整復装置300(図8、図9、および図10)は、先に説明したロッド整復装置の実施形態と実質的に類似する。しかし、ロッド整復装置300は、筐体20およびアンビル350と機械的に協調して配置された整復ネジ310を備える。整復ネジ310は、相互接続ピン330aおよび相互接続ピン330b、並びにアンビル頭部360と協調するため、その遠位端に係合用スプール320を有する。係合用スプール320は、中心の周囲に構築された環状チャネル322を備え、実質的に円筒形状である。アンビル350は、係合用スプール320、スラスト軸受370を備える整復ネジ310を受入れるように適合されたアンビルの穴352、およびアンビル頭部360を有する。係合用スプール320およびアンビル頭部360は、アンビル頭部360の下側と係合用スプール320の遠位端との間に挟まれたスラスト軸受370により部分的に隔たれて相互接続するように構成されている。さらに、係合用スプール320、アンビル頭部360、およびアンビル350は全て、相互接続ピン330aおよび相互接続ピン330bを介して相互接続される。
【0029】
図10に示されるように、アンビル頭部360は、スラスト軸受370および係合用スプール320の一部分を受入れるために、近位端から始まり、そこを通って部分的に構築された空洞を備えた、実質的に円筒形状の胴体を有する。さらに、アンビル頭部360は、遠位端において曲線面364を有する。曲線面364は、2つの突起部365および突起部366を有し、その両方は、縦軸「L」を横切って対称的に配置され、アンビル頭部360の中心線に対して間隔を空け、離れた関係で構成されている。放射状チャネル367は、2つの突起部365および突起部366の内壁により規定され、脊椎ロッド「R」と係合するように構築されている。この曲線面364は、脊椎ロッド「R」と良好な接触を提供するため、実質的に「V形状」であってよい。さらに、アンビル頭部360は、2つの相互嵌合ピン330aおよび相互嵌合ピン330bを介して係合用スプール320、アンビル頭部360、およびアンビル350を相互接続させるために、円筒形状の壁に配置された切欠き部361aおよび切欠き部361bを有することができる。さらに、アンビル頭部360は、変形を制限し、脊椎ロッド「R」(図7を参照)との強い面同士の接触を提供するために、硬質な材料から作製されてよい。
【0030】
操作において、整復ネジ310のネジ山は、ねじり力が整復ネジ310に加えられると、整復ネジ310の制御された直線の前進が適度に、徐々に生じるように、筐体の穴23の内側のネジ山と係合する。整復ネジ310が前進するにつれ、そこに接続されたアンビル頭部360は、同時にアーム330およびアーム340を閉じ位置に操作しながら、脊椎ロッド「R」と接触するまで、アンビル350とともに位置変えする。アンビル頭部360が脊椎ロッド「R」に近づくにつれ、アンビル頭部362の遠位面に規定された放射状チャネル367、例えばV形状の面は、脊椎ロッド「R」の輪郭を描く。スラスト軸受370は、縦軸「L」に沿った推進力へとねじり力を変え、脊椎ロッド「R」の前進を開始させる。さらに、整復ネジ310の前進が、骨アンカーの鞍部「X」内に脊椎ロッド「R」を整復させる。この実施形態では、整復ネジ310の近位面は、筐体20の頂面から下方に約0.020インチの凹部を形成し得る。この付加的変更により、脊椎ロッド「R」にアンビル頭部362をさらに圧迫することができる。
【0031】
代替え的な手段として、かつ追加して、駆動用チューブ800(図6)が、筐体20に取り外し可能に取り付けられてもよく、同様のねじり力により、ロッド整復装置および骨アンカー「B」を単一装置として前進させる。ねじり力の印加を補助する必要な機械的有利性を得るために、先行技術のうち任意の数のハンドルがドライバー700または駆動用チューブ800に取り付けられてもよい。当技術分野で知られる他の技術および/または器具が骨アンカーを組み込むために使用されることも考えられる。
【0032】
使用において、本開示で説明したロッド整復装置の任意の実施形態が、骨アンカー「B」の鞍部「X」に脊椎ロッド「R」を整復するために用いられてよい。この脊椎ロッドの整復は、骨アンカー「B」を骨に埋め込む前後に生じてよい。骨アンカー「B」を骨内に挿入するために、使用者は、駆動用器具「D」または任意の他の適した器具を使用してよい。
【0033】
使用者は、説明した任意のロッド整復装置を用いて脊椎ロッド「R」を整復してもよい。使用した特定の実施形態に関わらず、各アーム(例えば30および40)の把持機構32および把持機構42は、骨アンカー「B」の嵌合機構「M」と係合するものである。次いで、使用者は、アームが閉じ位置に至るまで第1アームおよび第2アーム(例えば30および40)に沿って遠位にアンビル(例えば50または250)を位置変えし、それによりロッド整復装置を骨アンカー「B」に締め付ける。ロッド整復装置を骨アンカー「B」に取り付ける後か前に、使用者は、第1アームと第2アーム(例えば30および40)との間に脊椎ロッド「R」を設置する。第1アームおよび第2アーム(例えば30および40)が第2位置に設置されると、アンビル(例えば50)のさらなる遠位への前進が、骨アンカー「B」の鞍部「X」内に脊椎ロッド「R」を推進させる。随意に、使用者は、止めネジ(不図示)を用いて骨アンカー「B」に脊椎ロッド「R」を固定してよい。
【0034】
操作の別の例示的な方法では、使用者は、多様な骨アンカー「B」内に単一の脊椎ロッド「R」を整復するため、単一の外科手術において多様なロッド整復装置(例えば100、200、または300)を使用してよい。この脊椎ロッドの整復は、骨アンカー「B」を骨に埋め込む前後に生じてよい。いずれにしても、この操作中に、使用者は、引き続いて骨アンカーに各ロッド整復装置を締め付ける。骨アンカー「B」にロッド整復装置を取り付ける前後に、使用者は、各ロッド整復装置の第1アームと第2アーム(例えば30および40)との間に脊椎ロッド「R」を設置する。次いで、使用者は、各骨アンカー「B」内に脊椎ロッド「R」の一部分を選択的に整復するため、各ロッド整復装置(上述した装置)を連続的に操作する。ついには、脊椎ロッド「R」が各骨アンカー「B」の鞍部「X」内に整復される。骨アンカー「B」内に脊椎ロッド「R」を整復した後、使用者は、止めネジ(不図示)を用いて各骨アンカー「B」内に脊椎ロッド「R」を連続的に固定してよい。
【0035】
開示の複数の実施形態を図面に示してきたが、本開示は、当技術分野が許容する同等の範囲まで広範なものであり、明細書が同じように解釈されることを意図するように、それらに限定されることを意図するものではない。それ故、先の説明は、限定していると解釈されるべきではなく、単に本開示の実施形態の例示にすぎない。従って、実施形態の範囲は、付与した例示ではなく、付随の請求の範囲およびその法的等価物により決められるべきである。
【技術分野】
【0001】
(関連出願の相互参照)
本出願は、2008年8月7日に出願された米国仮出願番号第61/086,957号、および2008年6月11日に出願された米国仮出願番号第61/131,645号の優先権を主張する。これらの内容全体は、参照により本明細書に組み込まれる。
【背景技術】
【0002】
本開示は、身体の骨および関節を安定させ、固定するための整形外科手術用の装置に関する。詳細には、本開示は制御された、整然とした方法で、骨アンカー内に脊椎ロッドを整復するための手動で操作される装置に関する。
【0003】
脊柱は、ヒトの身体に支持を提供し、脊髄および神経の保護を提供する骨および結合組織からなる複雑なシステムである。ヒトの脊椎は、生まれた時から33個の椎骨が備わっており、老人になるにつれ24個になる。各一対の椎骨の間には椎骨板があり、該椎骨板が隣接する椎骨の間の空間を維持し、圧迫、屈曲、回転という負担および動きにおいて、クッションとして役割を果たす。
【0004】
脊柱が生涯で経験し得る、さまざまな疾患、病気、およびさまざまな種類の損傷が存在する。限定されるものではないが、脊柱側弯症、脊柱後弯症、過剰な脊柱前弯症、脊椎すべり症、椎間板ヘルニアまたは椎間板破裂、椎間板変性症、椎体骨折、および腫瘍の問題を含み得る。上述の病態のうちいずれかの病態を患う人物は、典型的に強烈な痛みまたは衰弱化する苦痛を経験し、しばしば神経機能の低下を経験する。
【0005】
上述した病態のいずれかの病態に多い解決策の1つは、脊椎固定術として知られる外科処置を伴う。脊椎固定術の処置は、椎間板または関節において安定させるか、または動きを取り除くために、2つ以上の椎体を固定することを伴う。これを実現するために、天然または人工の骨が、スペーシング装置とともに、脊椎板の一部分または全てのいずれかを置換して、固定した骨の支柱を形成し、機械的な金属機器によって安定される。
【0006】
脊柱を固定させるために使用される機械的な金属機器は、一般的に、一式の骨ネジ/アンカー、および金属ロッドまたは金属プレートを含む。脊椎外科手術が後方で行われるとき、骨アンカーを椎体内に設置し、次いで隣接する椎体の間に金属ロッドを接続するのが一般的なやり方である。脊椎外科手術が前方で行われるとき、薄い金属プレートを直接椎体に接着させ、1つ以上の骨ネジを使用して各々椎骨レベルまで固定するのが一般的なやり方である。
【0007】
骨アンカーの受入れ用スロット内に脊椎ロッドを適切に挿入し、次いでその接続ロッドを定位置に締め付ける工程では、外科医にとって、多くの器具を使用し、膨大な時間および尽力を費やすことがしばし必要になる。複数の隣接する椎骨の骨アンカーが脊椎ロッドによりしっかりと接続されるべきときに、骨アンカーの頭部内にロッドを挿入し、次いで各個別の骨アンカーに対して定位置にロッドを締め付けるという工程を繰り返すことは困難であり、厄介であり、時間を浪費し得る。さらに、連続する骨アンカーの各々に接続するロッドの配列は、処置の間に調節することが必要となるかもしれず、それ故、連続して配列された骨アンカーの各々の頭部内にロッドを整復でき、必要に応じて簡単に調節でき、それにより外科医が労力を最小限にとどめ、余分な時間をとどめるように工程を促進できる装置および方法の提供が所望されている。
【発明の概要】
【課題を解決するための手段】
【0008】
本開示は、縦軸を規定し、かつ、遠位に延伸する第1アームおよび第2アームを有する筐体を備えるロッド整復装置を目的とする。筐体は、そこを通って縦方向に延伸する筐体の穴を備える。筐体の穴は、骨アンカーと係合するためのドライバーを受入れるように構成されている。ロッド整復装置は、ロッド整復装置および骨アンカーを骨内に前進させるドライバーと係合するように構成されている。
【0009】
筐体の第1アームおよび第2アームは、第1位置と少なくとも1つの第2位置との間で位置付け可能である。アームは、少なくとも1つの位置において互いに平行である。アームの遠位端は、骨アンカーと取り外し可能に取り付けられるように構成されている。アームの遠位端は、骨アンカーと係合するために、少なくとも1つの把持機構を備える。
【0010】
アンビルは、筐体の第1アームおよび第2アームと動作可能に結合し、骨アンカーへの脊椎ロッドの挿入を容易にするために縦軸に沿って位置変え可能である。アンビルは、筐体の第1アームおよび第2アームを受入れるために、第1穴および第2穴を備える。第1穴および第2穴は、互いに平行である。アンビルは、第1位置と少なくとも1つの第2位置との間で位置付け可能である。アンビルは、筐体から遠位の所定の距離にアンビルを移動させることにより、アームを平行位置に位置付けるように構成されている。アンビルは、そこを通って縦方向に延伸するアンビルの穴を備える。アンビルの穴は、骨アンカーと係合するためのドライバーを受入れるように構成されている。
【0011】
一実施形態では、アンビルは、その遠位端に配置されたアンビルの支柱を備える。
【0012】
一実施形態では、ロッド整復装置は、アンビルを前進させる整復ネジを備える。この実施形態では、整復ネジは、その遠位端に配置された係合用スプールを備え、ここで係合用スプールは、アンビル頭部と機械的に協同して配置される。アンビル頭部は、少なくとも1つの相互接続ピンを介して係合用スプールに連結される。スラスト軸受は、係合用スプールおよびアンビル頭部と動作可能に結合し、スラスト軸受はそれらの間に配置される。アンビル頭部は曲線面を有する。
【0013】
本開示の別の態様では、脊椎支持を提供する方法は、縦軸を規定し、かつ、遠位に延伸する第1アームおよび第2アーム有する筐体を有するロッド整復装置を提供することであり、ここでアームの遠位端が骨アンカーに取り外し可能に取り付けられるように構成されており、アンビルが筐体の第1アームおよび第2アームと動作可能に結合し、骨アンカーへの脊椎ロッドの挿入を容易にするために縦軸に沿って位置変え可能であり、アンビルおよび各アームが、第1位置と少なくとも1つの第2位置との間で位置付け可能である。方法はさらに、骨アンカーにロッド整復装置を締め付けることと、筐体の第1アームと第2アームとの間にロッドを設置することと、ロッド整復装置を用いて骨アンカー内にロッドを整復することと、骨アンカーにロッドを固定することとを含む。方法は、少なくとも1つの椎体に、少なくとも1つの骨アンカー、および少なくとも1つのロッドを取り付けることも含む。
【0014】
本開示の別の態様では、脊椎支持を提供するための方法は、各ロッド整復装置が縦軸を規定し、かつ、遠位に延伸する第1アームおよび第2アームを有する筐体を備える、複数のロッド整復装置を提供することであり、ここでアームの遠位端が骨アンカーに取り外し可能に取り付けられるように構成されおり、アンビルが筐体の第1アームおよび第2アームと動作可能に結合し、骨アンカー内へのロッドの挿入を容易にするために縦軸に沿って位置変え可能であり、アンビルおよび各アームが、第1位置と少なくとも1つの第2位置との間で位置付け可能である複数のロッド整復装置を提供することと、複数の骨アンカーを提供することとを含む。方法はさらに、複数の骨アンカーの骨アンカーに各ロッド整復装置を締め付けることと、各ロッド整復装置の第1アームと第2アームとの間にロッドを設置することと、ロッド整復装置を用いて複数の骨アンカー内にロッドの一部分を連続的に整復することと、複数の骨アンカーにロッドの一部分を連続的に固定することとを含む。本開示の上述のこと、他の態様、および特徴は、添付の図面と併せると、以下の詳細な説明を踏まえてより明らかになるであろう。
【図面の簡単な説明】
【0015】
【図1A】本開示に基づく、一実施形態に係るロッド整復装置の斜視図である。
【図1B】図1Aのロッド整復装置の、分離された部品の斜視図である。
【図2A】本開示に基づく、一実施形態に係る整復ネジの斜視図である。
【図2B】図2Aの整復ネジの上面図である。
【図3A】骨アンカー・アセンブリと係合する前の第1位置において示される、別の実施形態に係るロッド整復装置の斜視図である。
【図3B】ロッド整復装置が骨アンカー・アセンブリと係合した第2位置において示される、図3Aのロッド整復装置および骨アンカー・アセンブリの斜視図である。
【図4】図3Aおよび図3Bのロッド整復装置および骨アンカー・アセンブリを係合させるように位置付けられた、一実施形態に係るドライバーの斜視図である。
【図5】図3Aおよび図3Bのロッド整復装置および骨アンカー・アセンブリを係合させている、図2Aおよび図2Bの整復ネジの斜視図である。
【図6】図5に示されるアセンブリと係合する固定器具の斜視図である。
【図7】ロッド整復装置のアンビルの遠位側に形成された六角端を有する支柱を示す、図2Aおよび図2Bの整復ネジ、並びに図3Aから図6の骨アンカーを組み合わせた、一実施形態に係るロッド整復装置の斜視図である。
【図8】図3Aから図7のロッド整復装置および骨アンカーの別の実施形態に組み立てられた駆動用器具の斜視図である。
【図9】図8のロッド整復装置の斜視図である。
【図10】図8および図9のロッド整復装置の、分離された部品の斜視図である。
【発明を実施するための形態】
【0016】
添付の図面を参照し、本明細書において本開示の特定の実施形態を説明する。図面に示されるように、かつ以下の説明を通して説明するように、また対象についての関連位置の参照の際に一般的であるように、「近位」という用語は、使用者に近い装置の端部を指し、「遠位」という用語は、使用者から離れた装置の端部を指す。以下の説明では、不必要な細部において本開示を曖昧にさせないように、周知の機能または構造は詳細に説明しない。
【0017】
次に図面を参照するが、同様の参照番号は、複数の図を通して同一の、または実質的に類似する部品とみなし、図1Aによりロッド整復装置10を例証する。本開示によれば、ロッド整復装置10は、かつ、遠位に延伸する第1アーム30および第2アーム40を有する筐体20と、第1アーム30および第2アーム40と動作可能に関連付いたアンビル50を備える。
【0018】
図1Aを引き続き参照すると、筐体20は、縦軸「L」を規定し、近位端20aおよび遠位端20bを備える。近位端20aは、曲線になり得る頂面22、および縦方向の開口21を備える。筐体20は、そこを通って延伸する筐体の穴23を備える。縦方向の開口21および筐体の穴23は、複数の器具「I」(例えば、以下のさらなる詳細で説明する整復ネジ(図2Aおよび図2B))により係合され得る。さらに、筐体20は、第1切欠き部24、および実質的に第1切欠き部24に類似するが、筐体20の対向する側面に規定された第2切欠き部(不図示)を備える。第1切欠き部24および第2切欠き部は、第1アーム30および第2アーム40それぞれを受入れるように構成されている。第1チャネル25および第2チャネル27は、それぞれがそこを通る第1アームピン25aおよび第2アームピン27a(図3A)を受入れるために、筐体20の対向する側面に、縦軸「L」を横切り、筐体20を通って切り取られている。第2アームピン27aは、第1アームピン25aと同じものであり、各ピンは、筐体20に対して第1アーム30および第2アーム40それぞれを支持するように構成されている。そのようにして、第1アーム30および第2アーム40は、筐体20に対して旋回することができる。
【0019】
次に図1Aおよび図1Bを参照すると、第1アーム30は、第1切欠き部24内に位置付けられ、第2アーム40は、第2切欠き部内に位置付けられる。第1アーム30および第2アーム40は、アーム30およびアーム40の近位端に配置されたピン穴25bおよびピン穴27bを介してアームピン25aおよびアームピン27aを受入れる。第1アーム30および第2アーム40は、筐体20に旋回可能に取り付けられ、ここでアーム30およびアーム40は、筐体20に対して所定の角度を経て旋回し得る。従って、アーム30およびアーム40は、開き位置および閉じ位置を含む複数の位置を通して、移動可能であり、整復可能である。各アーム30およびアーム40の遠位端は、把持機構32および把持機構42になっており、対向する把持機構32および把持機構42を備えて鏡像配置されたフックまたは鉤爪であり得る。各把持機構32および把持機構42は、骨アンカー「B」(図3Aおよび図3Bを参照)の優遇的な嵌合機構と取り外し可能に取り付けられるように構成されている。各アーム30およびアーム40は、アンビル50がそこに沿って容易に位置変えできるように、内側の方を向いたカット部分44を備える。
【0020】
重ねて図1Aおよび図1Bを参照すると、アンビル50は、骨アンカー「B」(図3Aおよび図3Bを参照)への脊椎ロッド「R」(図5を参照)の挿入を容易にするために、開き位置から閉じ位置まで第1アーム30および第2アーム40に沿って、かつ縦軸「L」に沿って位置変えするための平行な第1アーム用の穴52および第2アーム用の穴54を備える。アンビル50は、そこを通って延伸する縦方向の開口51およびアンビルの穴53を備える。縦方向の開口51およびアンビルの穴53は、複数の器具「I」(例えば、以下のさらなる詳細で説明する整復ネジ600(図2Aおよび図2B)により係合され得る。弧状のチャネル55は、脊椎ロッド「R」(図5を参照)と係合するために、縦軸「L」を横切ってアンビル50の遠位端に沿って配置される。開き位置では、アーム30およびアーム40は離れており、アンビル50は筐体20の近位に配置されている。アンビル50が遠位に移動すると、アーム30およびアーム40は互いに向かって旋回し、平行になり、そして閉じ位置に位置付けられる。開き位置から閉じ位置へのアンビル50並びにアーム30およびアーム40の位置変えは、アンビル50がアーム30およびアーム40に沿った距離の最初の1/4内にある筺体20から、筐体20からアーム30およびアーム40の遠位端まで測定される縦軸の下方まで遠位に位置変えしたときに生じる。特に、ロッド整復装置10は、アーム30およびアーム40が平行になり、アンビル50が筐体20からおよそ25%位置変えしたときに「閉じた」とみなされる。ロッド整復装置10がその閉じ位置にあるとき、把持機構32および把持機構42、例えばフックまたは鉤爪の形状が、ロッド整復装置10を骨アンカー「B」に取り外し可能に取り付けながら、骨アンカー「B」の優遇的に嵌合する凹部「M」(図3Aおよび図3B)と係合する。ロッド整復装置10が骨アンカー「B」に取り外し可能に取り付けられると、2つのピースが単一装置として役割を果たし、協同して生体構造内に導入され得る。
【0021】
図3Aおよび図3Bに例示されるように、別の実施形態のロッド整復装置100が、骨アンカー「B」と係合する開き位置の状態で示される。ロッド整復装置100は、ロッド整復装置10と実質的に類似するが、ロッド整復装置100は、アンビル50が開き位置(図3A)から閉じ位置(図3B)までそこに沿って位置変えできるように、第1アーム130および第2アーム140の近位端に配置された、外側の方を向いた第1カット部分102および第2カット部分104を備える。
【0022】
図4で示されるように、駆動用端部710、例えば六角端を有するドライバー700は、筐体20を通って縦方向に配置された筐体の穴23、およびアンビル50を通って縦方向に配置されたアンビルの穴53を突き抜け得る。駆動用端部710に加え、ドライバー700は、筐体20と係合するように構成されたスリーブ720を備える。スリーブ720が筐体20と係合すると、ドライバー700は、ロッド整復装置10および骨アンカー「B」にトルクを送る。操作中、使用者は、骨アンカー「B」を骨内に挿入し、骨アンカー「B」の鞍部「X」内に脊椎ロッド「R」を整復するためにドライバー700を用いてよい。
【0023】
操作の一例示的な方法では、使用者は、骨に近接して骨アンカー「B」を位置付け、筐体20の近位端20aを覆ってスリーブ720を設置する。さらに、使用者は、駆動用端部710が骨アンカー「B」の軸部分「S」と係合するまで、駆動用端部710を筐体の穴23およびアンビルの穴53を通って突き抜けさせる。次いで、ねじり力がドライバー700に適用される。ねじり力の印加により、ロッド整復装置10は、骨アンカー「B」を骨内に遠位に前進させるように骨アンカー「B」とともに回転する。
【0024】
骨アンカー「B」がその所望の位置まで前進すると、ドライバー700および/または駆動用チューブ800は取り除かれてよく、整復ネジ600(図2Aおよび図2B)が、筐体の穴23(図5)およびアンビルの穴53を通って挿入され得る。図2Aから図2Cおよび図5で示されるように、整復ネジ600は、整復ネジ600を駆動させるためにその近位端に配置された頭部610、筐体の穴23およびアンビルの穴53を通って整復ネジ600を前進させるための、遠位端のネジ山部分620、並びにネジ山部分620の遠位に位置付けられた肩部630を有する。図5の例示から、脊椎ロッド「R」は、ロッド整復装置100の2つのアーム130とアーム140との間にも、骨アンカー「B」の鞍部「X」の上にも導入され得る。整復ネジ600のネジ山は、ねじり力が整復ネジ600に印加されると、整復ネジ600の制御された直線の前進が適度に、徐々に生じるように、筐体の穴23(図1Aを参照)の内側のネジ山と係合する。整復ネジ600は、前進しつつ、肩部630がアンビル50に係合するまでアンビルの穴53を突き抜ける。この位置で肩部630は、アンビル50に静止し、整復ネジ600がいつでもアンビル50を駆動させることができる。整復ネジ600の遠位へのさらなる前進が、第1アーム30および第2アーム40に沿ってアンビル50を遠位に駆動させる。最終的に、アンビル50の弧状のチャネル55は、脊椎ロッド「R」と係合する。弧状のチャネル55が脊椎ロッド「R」と係合すると、整復ネジ600の遠位へのさらなる前進により、アンビル50が骨アンカー「B」の鞍部「X」内に脊椎ロッド「R」を遠位に駆動させる。
【0025】
脊椎ロッド「R」が骨アンカー「B」の鞍部「X」に完全に整復されるか、または据付けられた後、固定器具である駆動用チューブ800(図6)は、アセンブリ全体の頭上に設置され得る。駆動用チューブ800のレバー810を握ることにより、駆動用チューブ800が骨アンカー「B」と係合し、整復ネジ600および脊椎ロッド「R」を下方に押しやりながら骨アンカー「B」の連結器「C」を引き上げ、それにより患者に力を加えること無く、骨アンカー「B」内に脊椎ロッド「R」を完全に固定する。レバー810を離すことにより骨アンカー「B」から駆動用チューブ800が外れ、そうして駆動用チューブ800は取り除かれ得る。次いで整復ネジ600がはずされてよく、後方に寄ったアンビル50、並びにロッド整復装置10および100は、骨アンカー「B」からバラされてよい。駆動用チューブ800は、脊椎ロッド「R」に骨アンカー「B」を完全またはある程度固定してよい。脊椎ロッド「R」は、脊椎ロッド「R」に沿った隣接する骨アンカー「B」の調節を促進させるため、骨アンカー「B」に対してある程度固定されてよい(すなわち、鞍部「X」に脊椎ロッド「R」を整復する(脊椎ロッド「R」は縦軸「L」を横切って移動することができる))か、または完全に固定され得る(すなわち、脊椎ロッド「R」が整復された後に鞍部「X」まで連結器「C」を引き上げる)。脊椎ロッド「R」に沿った多様な骨アンカー「B」を有する構築物が考慮される。駆動用チューブ800は、1つ以上の既成の脊椎ロッド「R」および骨アンカー「B」構築物を組み立てた後に、1つ以上の脊椎ロッド「R」を固定するために使用されてよい。1つ以上の脊椎ロッド「R」が1つ以上の骨アンカー「B」内に整復され、適切な設置のために調節された後、各脊椎ロッド「R」および各骨アンカー「B」は、本明細書で先に説明したような定位置に完全に固定することができる。従って、各脊椎ロッド「R」および骨アンカー「B」構築物は、本明細書で先に説明したような駆動用チューブ800を使用して、ある程度または完全に(個別的または協同的に)固定されてよい。それにより、骨アンカー「B」および脊椎ロッド「R」構築物は、患者に永続的な脊椎支持を提供し得る。
【0026】
別の実施形態のロッド整復装置200(図7)では、アンビル250は、その遠位端に配置されたアンビルの支柱260を備えて構成されている。アンビルの支柱260は、六角(ヘクサロビュラ)の遠位端262を有する。ロッド整復装置200のこの実施形態により、六角の遠位端262が骨アンカー「B」のネジの胴部「S」と嵌合しながら、アンビル250が、アーム130およびアーム140を骨アンカー「B」に締め付けるために遠位に移動することができる。次いで、図8に示されるような駆動用器具「D」は、駆動用器具「D」の近位端から骨内に、骨アンカー「B」のネジ胴部「S」を駆動させるように使用され得る。駆動用器具「D」は、筐体20と係合し、ロッド整復装置300および骨ロッド整復装置300に接着されたアンカー「B」にトルクを送るように構成された遠位端を備える。操作中、使用者は、骨アンカーの鞍部「X」内に脊椎ロッド「R」を整復する前後に、骨アンカー「B」を骨内に埋め込んでよい。骨アンカー「B」を埋め込むために、使用者はまず、筐体20を覆って駆動用器具「D」の遠位端を設置し、次いで駆動用器具「D」を遠位に前進させながら駆動用器具「D」を回転させる。回転の間、駆動用器具「D」の遠位端は、ロッド整復装置300および骨アンカー「B」にトルクを送る。その結果、骨アンカー「B」は徐々に骨内へと導入される。
【0027】
骨アンカー「B」を骨内に埋め込む前後に、使用者は、骨アンカーの鞍部「X」内に脊椎ロッド「R」を整復させる。脊椎ロッドの整復を実現させるため、アンビル250のアンビルの支柱260は近位方向に後退され、脊椎ロッド「R」がロッド整復装置200のアーム130とアーム140との間に設置される。次いで、使用者は、縦軸「L」の周囲で整復ネジ600を回転させ、それによりアンビルの支柱260を遠位に駆動させる。アンビルの支柱260が遠位に移動しながら、アンビルの支柱260の六角の遠位端262が骨アンカー「B」に脊椎ロッド「R」を整復させつつ脊椎ロッド「R」を遠位に推進させる。
【0028】
代替え的な実施形態のロッド整復装置300(図8、図9、および図10)は、先に説明したロッド整復装置の実施形態と実質的に類似する。しかし、ロッド整復装置300は、筐体20およびアンビル350と機械的に協調して配置された整復ネジ310を備える。整復ネジ310は、相互接続ピン330aおよび相互接続ピン330b、並びにアンビル頭部360と協調するため、その遠位端に係合用スプール320を有する。係合用スプール320は、中心の周囲に構築された環状チャネル322を備え、実質的に円筒形状である。アンビル350は、係合用スプール320、スラスト軸受370を備える整復ネジ310を受入れるように適合されたアンビルの穴352、およびアンビル頭部360を有する。係合用スプール320およびアンビル頭部360は、アンビル頭部360の下側と係合用スプール320の遠位端との間に挟まれたスラスト軸受370により部分的に隔たれて相互接続するように構成されている。さらに、係合用スプール320、アンビル頭部360、およびアンビル350は全て、相互接続ピン330aおよび相互接続ピン330bを介して相互接続される。
【0029】
図10に示されるように、アンビル頭部360は、スラスト軸受370および係合用スプール320の一部分を受入れるために、近位端から始まり、そこを通って部分的に構築された空洞を備えた、実質的に円筒形状の胴体を有する。さらに、アンビル頭部360は、遠位端において曲線面364を有する。曲線面364は、2つの突起部365および突起部366を有し、その両方は、縦軸「L」を横切って対称的に配置され、アンビル頭部360の中心線に対して間隔を空け、離れた関係で構成されている。放射状チャネル367は、2つの突起部365および突起部366の内壁により規定され、脊椎ロッド「R」と係合するように構築されている。この曲線面364は、脊椎ロッド「R」と良好な接触を提供するため、実質的に「V形状」であってよい。さらに、アンビル頭部360は、2つの相互嵌合ピン330aおよび相互嵌合ピン330bを介して係合用スプール320、アンビル頭部360、およびアンビル350を相互接続させるために、円筒形状の壁に配置された切欠き部361aおよび切欠き部361bを有することができる。さらに、アンビル頭部360は、変形を制限し、脊椎ロッド「R」(図7を参照)との強い面同士の接触を提供するために、硬質な材料から作製されてよい。
【0030】
操作において、整復ネジ310のネジ山は、ねじり力が整復ネジ310に加えられると、整復ネジ310の制御された直線の前進が適度に、徐々に生じるように、筐体の穴23の内側のネジ山と係合する。整復ネジ310が前進するにつれ、そこに接続されたアンビル頭部360は、同時にアーム330およびアーム340を閉じ位置に操作しながら、脊椎ロッド「R」と接触するまで、アンビル350とともに位置変えする。アンビル頭部360が脊椎ロッド「R」に近づくにつれ、アンビル頭部362の遠位面に規定された放射状チャネル367、例えばV形状の面は、脊椎ロッド「R」の輪郭を描く。スラスト軸受370は、縦軸「L」に沿った推進力へとねじり力を変え、脊椎ロッド「R」の前進を開始させる。さらに、整復ネジ310の前進が、骨アンカーの鞍部「X」内に脊椎ロッド「R」を整復させる。この実施形態では、整復ネジ310の近位面は、筐体20の頂面から下方に約0.020インチの凹部を形成し得る。この付加的変更により、脊椎ロッド「R」にアンビル頭部362をさらに圧迫することができる。
【0031】
代替え的な手段として、かつ追加して、駆動用チューブ800(図6)が、筐体20に取り外し可能に取り付けられてもよく、同様のねじり力により、ロッド整復装置および骨アンカー「B」を単一装置として前進させる。ねじり力の印加を補助する必要な機械的有利性を得るために、先行技術のうち任意の数のハンドルがドライバー700または駆動用チューブ800に取り付けられてもよい。当技術分野で知られる他の技術および/または器具が骨アンカーを組み込むために使用されることも考えられる。
【0032】
使用において、本開示で説明したロッド整復装置の任意の実施形態が、骨アンカー「B」の鞍部「X」に脊椎ロッド「R」を整復するために用いられてよい。この脊椎ロッドの整復は、骨アンカー「B」を骨に埋め込む前後に生じてよい。骨アンカー「B」を骨内に挿入するために、使用者は、駆動用器具「D」または任意の他の適した器具を使用してよい。
【0033】
使用者は、説明した任意のロッド整復装置を用いて脊椎ロッド「R」を整復してもよい。使用した特定の実施形態に関わらず、各アーム(例えば30および40)の把持機構32および把持機構42は、骨アンカー「B」の嵌合機構「M」と係合するものである。次いで、使用者は、アームが閉じ位置に至るまで第1アームおよび第2アーム(例えば30および40)に沿って遠位にアンビル(例えば50または250)を位置変えし、それによりロッド整復装置を骨アンカー「B」に締め付ける。ロッド整復装置を骨アンカー「B」に取り付ける後か前に、使用者は、第1アームと第2アーム(例えば30および40)との間に脊椎ロッド「R」を設置する。第1アームおよび第2アーム(例えば30および40)が第2位置に設置されると、アンビル(例えば50)のさらなる遠位への前進が、骨アンカー「B」の鞍部「X」内に脊椎ロッド「R」を推進させる。随意に、使用者は、止めネジ(不図示)を用いて骨アンカー「B」に脊椎ロッド「R」を固定してよい。
【0034】
操作の別の例示的な方法では、使用者は、多様な骨アンカー「B」内に単一の脊椎ロッド「R」を整復するため、単一の外科手術において多様なロッド整復装置(例えば100、200、または300)を使用してよい。この脊椎ロッドの整復は、骨アンカー「B」を骨に埋め込む前後に生じてよい。いずれにしても、この操作中に、使用者は、引き続いて骨アンカーに各ロッド整復装置を締め付ける。骨アンカー「B」にロッド整復装置を取り付ける前後に、使用者は、各ロッド整復装置の第1アームと第2アーム(例えば30および40)との間に脊椎ロッド「R」を設置する。次いで、使用者は、各骨アンカー「B」内に脊椎ロッド「R」の一部分を選択的に整復するため、各ロッド整復装置(上述した装置)を連続的に操作する。ついには、脊椎ロッド「R」が各骨アンカー「B」の鞍部「X」内に整復される。骨アンカー「B」内に脊椎ロッド「R」を整復した後、使用者は、止めネジ(不図示)を用いて各骨アンカー「B」内に脊椎ロッド「R」を連続的に固定してよい。
【0035】
開示の複数の実施形態を図面に示してきたが、本開示は、当技術分野が許容する同等の範囲まで広範なものであり、明細書が同じように解釈されることを意図するように、それらに限定されることを意図するものではない。それ故、先の説明は、限定していると解釈されるべきではなく、単に本開示の実施形態の例示にすぎない。従って、実施形態の範囲は、付与した例示ではなく、付随の請求の範囲およびその法的等価物により決められるべきである。
【特許請求の範囲】
【請求項1】
縦軸を規定し、かつ、遠位に延伸する第1アームおよび第2アームを有し、該各アームの遠位端が骨アンカーと取り外し可能に取り付けられるように構成された筐体と、
前記筐体の前記第1アームおよび前記第2アームと動作可能に結合し、前記骨アンカー内への脊椎ロッドの挿入を容易にするために前記縦軸に沿って位置変え可能なアンビルと、を備え、
前記アンビルおよび前記各アームは、第1位置と少なくとも1つの第2位置との間に位置付け可能であることを特徴とするロッド整復装置。
【請求項2】
前記アンビルは、前記筐体の前記第1アームおよび前記第2アームを受入れるための第1穴および第2穴を含むことを特徴とする請求項1記載のロッド整復装置。
【請求項3】
前記各アームは、少なくとも1つの位置において互いに平行となることを特徴とする請求項1記載のロッド整復装置。
【請求項4】
前記各アームの前記各遠位の端は、前記骨アンカーと係合するための少なくとも1つの把持機構を含むことを特徴とする請求項1記載のロッド整復装置。
【請求項5】
前記アンビルは、前記筐体から遠位の所定の距離に前記アンビルを移動させることにより、前記各アームを平行位置に位置付けるように構成されることを特徴とする請求項1記載のロッド整復装置。
【請求項6】
前記筐体は、縦に延伸する筐体穴を含み、前記アンビルは、縦に延伸するアンビル穴を含み、前記筐体穴および前記アンビル穴の両方は、前記骨アンカーと係合するためのドライバーを受入れるように構成されることを特徴とする請求項1記載のロッド整復装置。
【請求項7】
前記ロッド整復装置は、前記ロッド整復装置および前記骨アンカーを骨内に前進させるドライバーと係合するように構成されることを特徴とする請求項1記載のロッド整復装置。
【請求項8】
前記アンビルは、前記遠位端に配置されたアンビル支柱を含むことを特徴とする請求項1記載のロッド整復装置。
【請求項9】
さらに、前記アンビルを前進させる整復ネジを備えることを特徴とする請求項1記載のロッド整復装置。
【請求項10】
前記整復ネジは、その前記遠位端に配置された係合用スプールを含み、
前記係合用スプールは、アンビル頭部と機械的に協調して配置されることを特徴とする請求項9記載のロッド整復装置。
【請求項11】
前記アンビル頭部は、少なくとも1つの相互接続用ピンを介して前記係合用スプールと結合することを特徴とする請求項10記載のロッド整復装置。
【請求項12】
さらに、前記係合用スプールおよび前記アンビル頭部と動作可能に結合するスラスト軸受を備え、前記スラスト軸受は、それらの間に配置されることを特徴とする請求項11記載のロッド整復装置。
【請求項13】
前記アンビル頭部は、曲線面を有することを特徴とする請求項11記載のロッド整復装置。
【請求項1】
縦軸を規定し、かつ、遠位に延伸する第1アームおよび第2アームを有し、該各アームの遠位端が骨アンカーと取り外し可能に取り付けられるように構成された筐体と、
前記筐体の前記第1アームおよび前記第2アームと動作可能に結合し、前記骨アンカー内への脊椎ロッドの挿入を容易にするために前記縦軸に沿って位置変え可能なアンビルと、を備え、
前記アンビルおよび前記各アームは、第1位置と少なくとも1つの第2位置との間に位置付け可能であることを特徴とするロッド整復装置。
【請求項2】
前記アンビルは、前記筐体の前記第1アームおよび前記第2アームを受入れるための第1穴および第2穴を含むことを特徴とする請求項1記載のロッド整復装置。
【請求項3】
前記各アームは、少なくとも1つの位置において互いに平行となることを特徴とする請求項1記載のロッド整復装置。
【請求項4】
前記各アームの前記各遠位の端は、前記骨アンカーと係合するための少なくとも1つの把持機構を含むことを特徴とする請求項1記載のロッド整復装置。
【請求項5】
前記アンビルは、前記筐体から遠位の所定の距離に前記アンビルを移動させることにより、前記各アームを平行位置に位置付けるように構成されることを特徴とする請求項1記載のロッド整復装置。
【請求項6】
前記筐体は、縦に延伸する筐体穴を含み、前記アンビルは、縦に延伸するアンビル穴を含み、前記筐体穴および前記アンビル穴の両方は、前記骨アンカーと係合するためのドライバーを受入れるように構成されることを特徴とする請求項1記載のロッド整復装置。
【請求項7】
前記ロッド整復装置は、前記ロッド整復装置および前記骨アンカーを骨内に前進させるドライバーと係合するように構成されることを特徴とする請求項1記載のロッド整復装置。
【請求項8】
前記アンビルは、前記遠位端に配置されたアンビル支柱を含むことを特徴とする請求項1記載のロッド整復装置。
【請求項9】
さらに、前記アンビルを前進させる整復ネジを備えることを特徴とする請求項1記載のロッド整復装置。
【請求項10】
前記整復ネジは、その前記遠位端に配置された係合用スプールを含み、
前記係合用スプールは、アンビル頭部と機械的に協調して配置されることを特徴とする請求項9記載のロッド整復装置。
【請求項11】
前記アンビル頭部は、少なくとも1つの相互接続用ピンを介して前記係合用スプールと結合することを特徴とする請求項10記載のロッド整復装置。
【請求項12】
さらに、前記係合用スプールおよび前記アンビル頭部と動作可能に結合するスラスト軸受を備え、前記スラスト軸受は、それらの間に配置されることを特徴とする請求項11記載のロッド整復装置。
【請求項13】
前記アンビル頭部は、曲線面を有することを特徴とする請求項11記載のロッド整復装置。
【図1A】


【図1B】
【図2A】
【図2B】
【図3A】
【図3B】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図1B】
【図2A】
【図2B】
【図3A】
【図3B】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公表番号】特表2011−524198(P2011−524198A)
【公表日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願番号】特願2011−513680(P2011−513680)
【出願日】平成21年6月11日(2009.6.11)
【国際出願番号】PCT/US2009/047002
【国際公開番号】WO2009/152302
【国際公開日】平成21年12月17日(2009.12.17)
【出願人】(507349558)ケー2エム, インコーポレイテッド (10)
【Fターム(参考)】
【公表日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願日】平成21年6月11日(2009.6.11)
【国際出願番号】PCT/US2009/047002
【国際公開番号】WO2009/152302
【国際公開日】平成21年12月17日(2009.12.17)
【出願人】(507349558)ケー2エム, インコーポレイテッド (10)
【Fターム(参考)】
[ Back to top ]