
ロボット
【課題】 人の生体情報を検出できる機能を備えることにより、医療関係ロボット、アミューズメントロボット、産業用ロボット等としてより高機能のロボットを提供する。
【解決手段】 ロボットの指の部分に生体情報をセンシングできるセンサ部1を設けている。このセンサ部1は、人の脈拍や血圧等を測るための脈波センサである発光装置11及び受光装置12と、人体のインピーダンスを測定するための電流印加用電極15及び電圧検知用電極16とからなる。そして、受光装置12からの脈波信号や電流印加用電極15及び電圧検知用電極16により測定された人体のインピーダンス値に基づいて、心電、血圧、脈拍、脈波、体温、呼吸、体脂肪、骨密度、脳波、血中酸素濃度、血糖値等の生体情報を演算等により求める。
【解決手段】 ロボットの指の部分に生体情報をセンシングできるセンサ部1を設けている。このセンサ部1は、人の脈拍や血圧等を測るための脈波センサである発光装置11及び受光装置12と、人体のインピーダンスを測定するための電流印加用電極15及び電圧検知用電極16とからなる。そして、受光装置12からの脈波信号や電流印加用電極15及び電圧検知用電極16により測定された人体のインピーダンス値に基づいて、心電、血圧、脈拍、脈波、体温、呼吸、体脂肪、骨密度、脳波、血中酸素濃度、血糖値等の生体情報を演算等により求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、生体情報をセンシングできる機能を有するロボットに関する。
【背景技術】
【0002】
従来、ロボットは産業用ロボットとして工場等で使われてきたが、最近では、ペット型ロボットやヒューマノイド型ロボット等、ロボットは広い分野に進出しつつある。
【0003】
しかし、現在のロボットのセンシング機能は、CCD等の撮像素子より得た情報を解析することにより人と物を判別したり、感圧センサ等による接触した圧力状態の検出により判別するものがほとんどである。
【0004】
一方、来るべき高齢化社会において、労働やサービスの一部をロボットにより肩代わりしてもらう必要が生じている。そのためには、人もしくは生物とロボットの共存が必要であり、人の生体情報をセンシングできるセンサが必要である。しかし、現状のロボットにおいては、人や生物のセンシング機能は、視覚機能によるものや熱、音、圧力、接触等の各センサによるセンシングから推定するものであり、人の生体情報を直接センシングするものではなかった。
【0005】
一方、人体に装着して、人の生体情報を直接センシングする装置とペット型ロボットとを連係させた装置が提案されている(例えば、特許文献1参照)。
【0006】
この装置は、生体情報を人体から検出する検出部を備え、予め検出された生体情報を比較情報として記憶部に記憶する。そして、状態制御支援モードにおいて、検出部により再度検出された生体情報と前記記憶部に記憶しておいた比較情報とを比較し、その比較結果に基づいてペット型ロボットが独自の基本動作をするように制御する構成となっている。この装置は、具体的には、腕時計型、眼鏡型、カード型、万歩計型など、人が装着し易い形状となっている。
【特許文献1】特開2000−5317号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
このように、生体情報を検出する従来の装置は、腕時計型、眼鏡型、カード型、万歩計型など、人が装着し易い形状となっており、この装置からペット型ロボットを制御するようになっている。すなわち、ペット型ロボットは、生体情報を検出する装置の単なる制御対象として扱われており、人の生体情報を直接的に感知するセンサをロボットの構成部分のいずれかに備えたロボットは現在のところ提案されていない。
【0008】
本発明はかかる実情に鑑みて創案されたもので、その目的は、人の生体情報を検出できる機能を備えた医療関係ロボット、ペット型ロボット、アミューズメント用ロボット、産業用ロボット等として好適なロボット、特に人と同じような手を有するロボットを提供することにある。
【課題を解決するための手段】
【0009】
本発明のロボットは、基本機能として、数値入力機能、表示機能、送受信機能、記憶機能、アラーム機能、アプリケーションソフトウェア実行機能、演算機能、制御機能等を有している。そして、このようなロボットの構成部分のいずれかに生体情報をセンシングできる機能を有するセンサが設けられている。具体的には、このセンサのセンシング部分がロボットの指に設けられている。また、このセンサによりセンシングされる生体情報としては、心電、血圧、脈拍、脈波、体温、体脂肪、骨密度、血中酸素濃度、血糖値の少なくとも1つ以上である。
【0010】
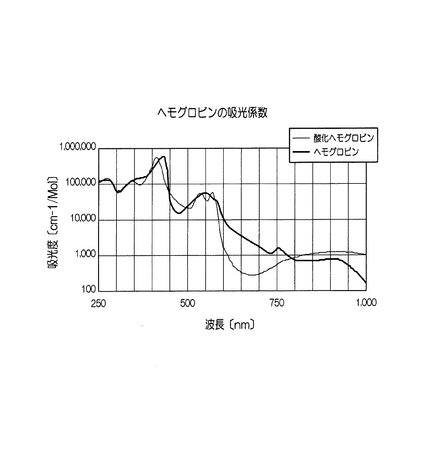
具体的には、前記センサが発光装置と受光装置の組み合わせからなる光学的な手法の場合、前記脈拍は、血中ヘモグロビンのうち酸素の多い酸化ヘモグロビンの吸光特性を利用して前記センサによりセンシングすることにより求めることができる。光学的な手法では赤外光を用いた容積脈波による測定が一般的である。これは血中ヘモグロビンのうち酸素の多い酸化ヘモグロビンの吸光が赤外領域において多いことを利用している。血管の脈拍をセンシングするためには、血管中の血液の動きを検知する必要があり、本発明では、血液中に含まれている赤血球中の酸化ヘモグロビンの吸収光スペクトル特性(図4参照)を利用し、ある特定の波長の光を照射すると酸化ヘモグロビンの吸収によって反射光量が減少する、という特性を利用してセンシングを行うようにしている。図4に示す吸収光スペクトル特性からも分かるように、吸光度のみで波長を選択する場合には、400nm付近の光が良いが、皮膚の散乱特性や水分による吸収による擾乱等を考慮し、用途や目的に応じて適当な波長を選べばよい。
【0011】
また、前記センサが感圧素子からなる場合、前記脈拍は、前記感圧素子により血管の圧力変動をセンシングすることにより求めることができる。
【0012】
また、前記血圧は、心電と脈波の時間差より演算により求めることができる。この心電と脈波の時間差より演算によって血圧値を求める技術は、例えば特許登録第3028601号公報に記載されている。
【0013】
この他にも、前記血圧は、体の2つの測定部位の間の脈波伝播速度の違い(脈波伝播時間の差)により求めることもできる。体の2つの測定部位の間の脈拍の時間差によって求められる脈波伝播時間と血圧値には相関関係があることは知られている(例えば、特開2000−107141号公報参照)。この脈波伝播時間と血圧値との相関関係については個人差があるため、あらかじめ最高血圧と最低血圧を測定する必要がある。そのため、別の血圧計にて最高血圧値と最低血圧値をあらかじめ測定しておくことで血圧の個人差を解消する。具体的には、別の血圧計にて測定した既測定済みの最高血圧値及び最低血圧値と、脈波伝播時間に基づく実際の最高血圧値及び最低血圧値との関係式(補正式)を求めて、その関係式により実際の測定血圧値を補正することにより、高い測定精度が得られるようにする。
【0014】
また、上記の脈波は、測定を光学的手法で行う場合には、発光装置と受光装置の組み合わせからなるセンサを用い、上記したように、血中ヘモグロビンのうち酸素の多い酸化ヘモグロビンの吸光特性を利用して測定することができる。また、脈波は、測定を圧力的手法で行う場合には、上記したように、感圧素子により血管の圧力変動を捉え、この圧力変動状態の推移より測定することができる。
【0015】
また、前記血中酸素濃度(SpO2)は、上記の脈波の測定を光学的手法で行った場合には、発光装置と受光装置の組み合わせからなるセンサを用い、複数の光の波長を用いることにより血液内の酸化ヘモグロビンの吸光度を測定することで求めることができる。
【0016】
また、前記体脂肪または骨密度は、測定部位の2点間に電流を流し、その2点間の電圧より生体のインピーダンスを測定することで演算により求めることができる。さらに、前記心電は、体の2点間の部位を誘導法により測定することにより求めることができる。この誘導法による測定については、[題名:「初めて心電図を学ぶ方々へ」、著者:森谷藤樹、出版社:鳳鳴堂書店]に記載されている。
【0017】
また、前記体温は、センサとして焦電センサを用い、この焦電センサにより耳の中を測定することで求めることができる。さらに、血糖値は、測定を光学的手法で行った場合には、複数の近赤外光源及び受光素子からなるセンサを用い、このセンサにより非接触で測定することができる。
【0018】
また、本発明のロボットは、ネットワーク接続機能を備えていてもよい。そして、このネットワーク接続機能を利用して他の機器と通信を行うことにより、他の機器に情報を送信したり、他の機器から必要な情報を取得することが可能となる。
【発明の効果】
【0019】
本発明のロボットは、ロボットの構成部分のいずれかに生体情報をセンシングできる機能を有するセンサを設けた構成としたので、従来の工業用ロボットに限らず、介護用ロボットや医療用ロボットとしても利用することができる。さらには、ペット型ロボットやアミューズメント用ロボットとしても利用することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施の形態について、図面を参照して説明する。
【0021】
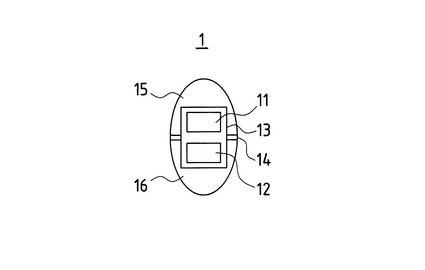
図1は、生体情報をセンシングするセンサ部1の一構成例を示している。
【0022】
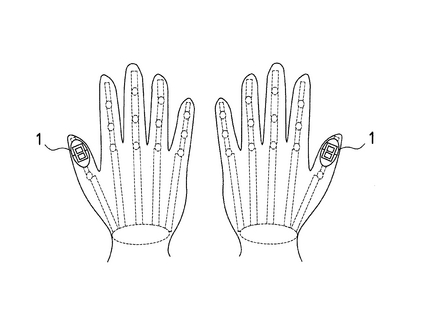
本実施形態のセンサ部1は、例えば図2に示すように、ロボットアームの手の部分の指先に取り付けることにより、生体情報のセンシングを可能としている。この例では、左右それぞれの手の親指の手のひら側に取り付けているが、取り付け場所は親指のみに限定されるものではなく、人指し指や中指、薬指や小指等にも取り付けてもよい。また、指先に限らず、場合によっては手の甲や手のひらに取り付けても良い。いずれにしても、人の生体情報を最もセンシングし易い場所に取り付ければよい。
【0023】
図1に示すセンサ部1は、人の脈拍や血圧等を測るための脈波センサである発光装置11及び受光装置12をフレキシブル基板13上に搭載して中央部に配置し、この発光装置11と受光装置12の周りを取り囲むようにして、絶縁部14により2分割された電極15,16が設けられている。この電極15,16は、人体のインピーダンスを測定するための電流印加用電極及び電圧検知用電極であり、心電を測定するための電極部も兼ねた構成となっている。
【0024】
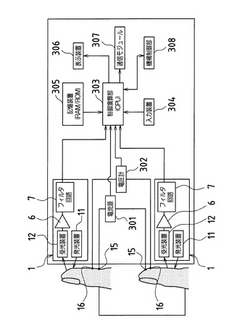
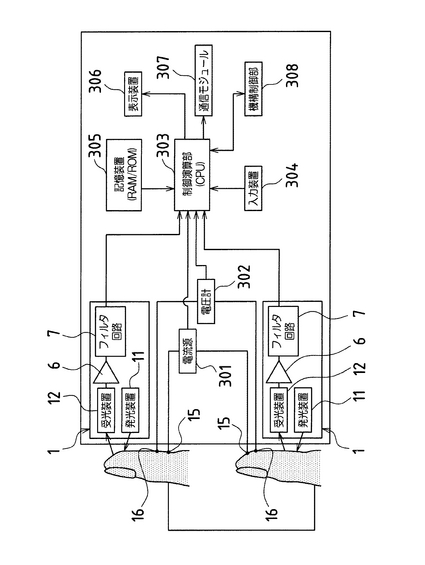
図3は、上記構成のセンサ部1を搭載したロボットのシステム構成を示すブロック図である。
【0025】
まず、血圧を測定するためには複数箇所の脈波をセンシングする必要があるので、この例では、図1に示すセンサ部1を2つ用い、そのセンサ部1を左右のアームの手の指先(この例では親指)に設置している。このように設置された各受光装置12の出力はアンプ6及びフィルタ回路7を通過した後、後述する演算部303に入力される。
【0026】
また、この例では、測定系として、各電流印加用電極15,15に電流を印加する電流源301、2つの電圧検知用電極16,16との間の電圧を測定する電圧計302、制御演算部(CPU)303、入力装置304、記憶装置(RAM/ROM)305、表示装置306、及び、通信モジュール307などを備えている。また、制御演算部303には、ロボットのアームや手、指先等の各種機構部を制御する機構制御部308が双方向に接続されている。
【0027】
<実施形態1>
次に、上記構成のロボットを医療・介護用ロボットとして用いる場合の実施形態について説明する。来るべき高齢社会に向け、今後、医療や介護向けロボットが発達するものと思われる。特に、人の脈拍や血圧等の情報は人体の生体情報のうち重要な情報である。
【0028】
以下、本実施形態1の測定処理について説明する。
【0029】
まず、この例では、別の血圧計にて測定された最高血圧と最低血圧値、及び、年齢、身長、体重、性別等の情報を入力装置304から入力して記憶装置305に記憶しておく。次に、図3に示すように、2つのセンサ部1,1をそれぞれ人体の左右の指に接触させた状態で、各センサ部1,1を駆動するとともに、電流源301から各電流印加用電極15,15に電流を印加して測定を実行する。この測定実行により、2つの受光装置12,12からの脈波信号、電圧計302にて測定された電圧信号、及び、電流源301の印加電流値が制御演算部303に入力される。
【0030】
制御演算部303では、入力された2つの脈波信号から脈拍と脈波伝播時間(脈波伝播速度の違いによる時間差)とを求めるとともに、電圧計302及び電流源301からの信号に基づいて人体のインピーダンス値を求める。そして、脈波伝播時間から血圧値(最高血圧値、最低血圧値)を求める。または、心電と脈波の遅延時間より血圧値(最高血圧値、最低血圧値)を求める。心電と脈波より血圧値を求める技術は、上記したように特許登録第3028601号公報に記載されている。また、心電を測定する方法としては、従来より誘導法が用いられている。誘導法には双極誘導と単極誘導とがあるが、本実施形態では単極誘導を用いる。すなわち、一方のセンサ部1を心臓の近くに置き、他方のセンサ部1を心臓から距離的に遠い部位(手、足等)に置いて体内の微弱電流を測定することで、心電(心起電力)を測定することができる。
【0031】
また、制御演算部303では、求めたインピーダンス値と、既入力済みの年齢、身長、体重、性別等の情報とに基づいて、体脂肪または骨密度を求める。
【0032】
なお、2つの発光装置11,11より複数の適当な波長の光(複数の近赤外光)を照射して、近赤外光の受光が可能な受光装置12,12からの信号解析に基づいて、血中酸素濃度や血糖値も同時に測定することができる。
【0033】
また、図示は省略しているが、センサ部1が焦電センサである場合には、親指を耳のそばに近づけて、焦電センサにより耳の中を測定することで、体温も測定することが可能である。
【0034】
制御演算部303では、これらの演算結果を表示装置306に表示するとともに、記憶装置305に記憶される。
また、心電、血圧(最高血圧、最低血圧)、脈拍、脈波、体温、体脂肪、骨密度、血中酸素濃度及び血糖値等の演算結果は、通信モジュール307を用いて他の外部装置に対して送受信するようにしてもよい。
【0035】
以上説明したように、人の手の形を模したロボットでは、例えば親指や人差し指等の先端付近にセンサ部1を取り付け、手をつなぐことで、生体情報をセンシングできる。このような形にすることで、介護者の歩行を手伝うような場面でもセンシング可能であるという利点がある。
【0036】
なお、上記実施形態1では、脈波のセンシングを発光装置11と受光装置12からなる光学的手法によって行っているが、脈波のセンシングのみであれば感圧素子により血管の圧力変動をセンシングする圧力的手法を用いることも可能である。
【0037】
<実施形態2>
本実施形態2は、本発明のロボットを産業用ロボットとして用いる場合の実施形態である。
【0038】
人とロボットが混在するような製造現場に設置されたロボットは、多種のセンサにより人の動きを監視しつつ作業を行うことになる。しかし、生体の情報を視覚または触覚でしか捕らえることのできない従来のロボットでは、ロボット同士は通信機能等を介して双方向通信を行うことにより、接触するようなことは基本的にない。しかし、その中に人が入った場合、人の動きが無い場合や、感熱によるセンシングでは、例えば周囲温度の関係やセンサの不調により人か物か区別できなくなる可能性が高い。従って、産業用ロボットを本発明のような生体情報をセンシングできる機能を有するロボットとすることで、触覚センサと脈波センサにより生体か否かを判別することができるので、ロボットが人に接触するといった事故を予防することができる。
【0039】
<実施形態3>
本実施形態3は、本発明のロボットをペット型ロボットまたはアミューズメント用ロボットとして用いる場合の実施形態である。
【0040】
ペット型ロボットが普及するにつれ、ロボット側でも人の体調や精神状態により対応できる方がより高機能化できる。そのため、本発明に係わるセンサ部1を取り付けることで、例えばペット型ロボットでは、主人に抱かれているときに主人の身体状態をチェックすることが可能となる。そして、その情報を元に、適当なプログラムを選択し、主人の気に入る振る舞いをするようにすればよい。また、センシングした値が異常値を検出した場合には主人に警告し、主人の反応がなければ、ネットワーク機能を用いて緊急である旨通報するように構成することができる。
【0041】
また、アミューズメント用ロボットでも同様に、人の身体状態を把握することによりプログラムを選択することにより、最適なサービスの提供が可能となる。
【図面の簡単な説明】
【0042】
【図1】本発明に係わる生体情報をセンシングするセンサ部の一構成例を示す概略平面図である。
【図2】センサ部をロボットの指先部分に取り付けた状態を示す説明図である。
【図3】本発明の係わるセンサ部を搭載したロボットのシステム構成を示すブロック図である。
【図4】酸化ヘモグロビンの吸光特性を示すグラフである。
【符号の説明】
【0043】
1 センサ部
6 アンプ
7 フィルタ回路
11 発光装置
12 受光装置
13 フレキシブル基板
14 絶縁部
15 電流印加用電極
16 電圧検知用電極
301 電流源
302 電圧計
303 制御演算部(CPU)
304 記憶装置(RAM/ROM)
305 入力装置
306 表示装置
307 通信モジュール
308 機構制御部
【技術分野】
【0001】
本発明は、生体情報をセンシングできる機能を有するロボットに関する。
【背景技術】
【0002】
従来、ロボットは産業用ロボットとして工場等で使われてきたが、最近では、ペット型ロボットやヒューマノイド型ロボット等、ロボットは広い分野に進出しつつある。
【0003】
しかし、現在のロボットのセンシング機能は、CCD等の撮像素子より得た情報を解析することにより人と物を判別したり、感圧センサ等による接触した圧力状態の検出により判別するものがほとんどである。
【0004】
一方、来るべき高齢化社会において、労働やサービスの一部をロボットにより肩代わりしてもらう必要が生じている。そのためには、人もしくは生物とロボットの共存が必要であり、人の生体情報をセンシングできるセンサが必要である。しかし、現状のロボットにおいては、人や生物のセンシング機能は、視覚機能によるものや熱、音、圧力、接触等の各センサによるセンシングから推定するものであり、人の生体情報を直接センシングするものではなかった。
【0005】
一方、人体に装着して、人の生体情報を直接センシングする装置とペット型ロボットとを連係させた装置が提案されている(例えば、特許文献1参照)。
【0006】
この装置は、生体情報を人体から検出する検出部を備え、予め検出された生体情報を比較情報として記憶部に記憶する。そして、状態制御支援モードにおいて、検出部により再度検出された生体情報と前記記憶部に記憶しておいた比較情報とを比較し、その比較結果に基づいてペット型ロボットが独自の基本動作をするように制御する構成となっている。この装置は、具体的には、腕時計型、眼鏡型、カード型、万歩計型など、人が装着し易い形状となっている。
【特許文献1】特開2000−5317号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
このように、生体情報を検出する従来の装置は、腕時計型、眼鏡型、カード型、万歩計型など、人が装着し易い形状となっており、この装置からペット型ロボットを制御するようになっている。すなわち、ペット型ロボットは、生体情報を検出する装置の単なる制御対象として扱われており、人の生体情報を直接的に感知するセンサをロボットの構成部分のいずれかに備えたロボットは現在のところ提案されていない。
【0008】
本発明はかかる実情に鑑みて創案されたもので、その目的は、人の生体情報を検出できる機能を備えた医療関係ロボット、ペット型ロボット、アミューズメント用ロボット、産業用ロボット等として好適なロボット、特に人と同じような手を有するロボットを提供することにある。
【課題を解決するための手段】
【0009】
本発明のロボットは、基本機能として、数値入力機能、表示機能、送受信機能、記憶機能、アラーム機能、アプリケーションソフトウェア実行機能、演算機能、制御機能等を有している。そして、このようなロボットの構成部分のいずれかに生体情報をセンシングできる機能を有するセンサが設けられている。具体的には、このセンサのセンシング部分がロボットの指に設けられている。また、このセンサによりセンシングされる生体情報としては、心電、血圧、脈拍、脈波、体温、体脂肪、骨密度、血中酸素濃度、血糖値の少なくとも1つ以上である。
【0010】
具体的には、前記センサが発光装置と受光装置の組み合わせからなる光学的な手法の場合、前記脈拍は、血中ヘモグロビンのうち酸素の多い酸化ヘモグロビンの吸光特性を利用して前記センサによりセンシングすることにより求めることができる。光学的な手法では赤外光を用いた容積脈波による測定が一般的である。これは血中ヘモグロビンのうち酸素の多い酸化ヘモグロビンの吸光が赤外領域において多いことを利用している。血管の脈拍をセンシングするためには、血管中の血液の動きを検知する必要があり、本発明では、血液中に含まれている赤血球中の酸化ヘモグロビンの吸収光スペクトル特性(図4参照)を利用し、ある特定の波長の光を照射すると酸化ヘモグロビンの吸収によって反射光量が減少する、という特性を利用してセンシングを行うようにしている。図4に示す吸収光スペクトル特性からも分かるように、吸光度のみで波長を選択する場合には、400nm付近の光が良いが、皮膚の散乱特性や水分による吸収による擾乱等を考慮し、用途や目的に応じて適当な波長を選べばよい。
【0011】
また、前記センサが感圧素子からなる場合、前記脈拍は、前記感圧素子により血管の圧力変動をセンシングすることにより求めることができる。
【0012】
また、前記血圧は、心電と脈波の時間差より演算により求めることができる。この心電と脈波の時間差より演算によって血圧値を求める技術は、例えば特許登録第3028601号公報に記載されている。
【0013】
この他にも、前記血圧は、体の2つの測定部位の間の脈波伝播速度の違い(脈波伝播時間の差)により求めることもできる。体の2つの測定部位の間の脈拍の時間差によって求められる脈波伝播時間と血圧値には相関関係があることは知られている(例えば、特開2000−107141号公報参照)。この脈波伝播時間と血圧値との相関関係については個人差があるため、あらかじめ最高血圧と最低血圧を測定する必要がある。そのため、別の血圧計にて最高血圧値と最低血圧値をあらかじめ測定しておくことで血圧の個人差を解消する。具体的には、別の血圧計にて測定した既測定済みの最高血圧値及び最低血圧値と、脈波伝播時間に基づく実際の最高血圧値及び最低血圧値との関係式(補正式)を求めて、その関係式により実際の測定血圧値を補正することにより、高い測定精度が得られるようにする。
【0014】
また、上記の脈波は、測定を光学的手法で行う場合には、発光装置と受光装置の組み合わせからなるセンサを用い、上記したように、血中ヘモグロビンのうち酸素の多い酸化ヘモグロビンの吸光特性を利用して測定することができる。また、脈波は、測定を圧力的手法で行う場合には、上記したように、感圧素子により血管の圧力変動を捉え、この圧力変動状態の推移より測定することができる。
【0015】
また、前記血中酸素濃度(SpO2)は、上記の脈波の測定を光学的手法で行った場合には、発光装置と受光装置の組み合わせからなるセンサを用い、複数の光の波長を用いることにより血液内の酸化ヘモグロビンの吸光度を測定することで求めることができる。
【0016】
また、前記体脂肪または骨密度は、測定部位の2点間に電流を流し、その2点間の電圧より生体のインピーダンスを測定することで演算により求めることができる。さらに、前記心電は、体の2点間の部位を誘導法により測定することにより求めることができる。この誘導法による測定については、[題名:「初めて心電図を学ぶ方々へ」、著者:森谷藤樹、出版社:鳳鳴堂書店]に記載されている。
【0017】
また、前記体温は、センサとして焦電センサを用い、この焦電センサにより耳の中を測定することで求めることができる。さらに、血糖値は、測定を光学的手法で行った場合には、複数の近赤外光源及び受光素子からなるセンサを用い、このセンサにより非接触で測定することができる。
【0018】
また、本発明のロボットは、ネットワーク接続機能を備えていてもよい。そして、このネットワーク接続機能を利用して他の機器と通信を行うことにより、他の機器に情報を送信したり、他の機器から必要な情報を取得することが可能となる。
【発明の効果】
【0019】
本発明のロボットは、ロボットの構成部分のいずれかに生体情報をセンシングできる機能を有するセンサを設けた構成としたので、従来の工業用ロボットに限らず、介護用ロボットや医療用ロボットとしても利用することができる。さらには、ペット型ロボットやアミューズメント用ロボットとしても利用することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施の形態について、図面を参照して説明する。
【0021】
図1は、生体情報をセンシングするセンサ部1の一構成例を示している。
【0022】
本実施形態のセンサ部1は、例えば図2に示すように、ロボットアームの手の部分の指先に取り付けることにより、生体情報のセンシングを可能としている。この例では、左右それぞれの手の親指の手のひら側に取り付けているが、取り付け場所は親指のみに限定されるものではなく、人指し指や中指、薬指や小指等にも取り付けてもよい。また、指先に限らず、場合によっては手の甲や手のひらに取り付けても良い。いずれにしても、人の生体情報を最もセンシングし易い場所に取り付ければよい。
【0023】
図1に示すセンサ部1は、人の脈拍や血圧等を測るための脈波センサである発光装置11及び受光装置12をフレキシブル基板13上に搭載して中央部に配置し、この発光装置11と受光装置12の周りを取り囲むようにして、絶縁部14により2分割された電極15,16が設けられている。この電極15,16は、人体のインピーダンスを測定するための電流印加用電極及び電圧検知用電極であり、心電を測定するための電極部も兼ねた構成となっている。
【0024】
図3は、上記構成のセンサ部1を搭載したロボットのシステム構成を示すブロック図である。
【0025】
まず、血圧を測定するためには複数箇所の脈波をセンシングする必要があるので、この例では、図1に示すセンサ部1を2つ用い、そのセンサ部1を左右のアームの手の指先(この例では親指)に設置している。このように設置された各受光装置12の出力はアンプ6及びフィルタ回路7を通過した後、後述する演算部303に入力される。
【0026】
また、この例では、測定系として、各電流印加用電極15,15に電流を印加する電流源301、2つの電圧検知用電極16,16との間の電圧を測定する電圧計302、制御演算部(CPU)303、入力装置304、記憶装置(RAM/ROM)305、表示装置306、及び、通信モジュール307などを備えている。また、制御演算部303には、ロボットのアームや手、指先等の各種機構部を制御する機構制御部308が双方向に接続されている。
【0027】
<実施形態1>
次に、上記構成のロボットを医療・介護用ロボットとして用いる場合の実施形態について説明する。来るべき高齢社会に向け、今後、医療や介護向けロボットが発達するものと思われる。特に、人の脈拍や血圧等の情報は人体の生体情報のうち重要な情報である。
【0028】
以下、本実施形態1の測定処理について説明する。
【0029】
まず、この例では、別の血圧計にて測定された最高血圧と最低血圧値、及び、年齢、身長、体重、性別等の情報を入力装置304から入力して記憶装置305に記憶しておく。次に、図3に示すように、2つのセンサ部1,1をそれぞれ人体の左右の指に接触させた状態で、各センサ部1,1を駆動するとともに、電流源301から各電流印加用電極15,15に電流を印加して測定を実行する。この測定実行により、2つの受光装置12,12からの脈波信号、電圧計302にて測定された電圧信号、及び、電流源301の印加電流値が制御演算部303に入力される。
【0030】
制御演算部303では、入力された2つの脈波信号から脈拍と脈波伝播時間(脈波伝播速度の違いによる時間差)とを求めるとともに、電圧計302及び電流源301からの信号に基づいて人体のインピーダンス値を求める。そして、脈波伝播時間から血圧値(最高血圧値、最低血圧値)を求める。または、心電と脈波の遅延時間より血圧値(最高血圧値、最低血圧値)を求める。心電と脈波より血圧値を求める技術は、上記したように特許登録第3028601号公報に記載されている。また、心電を測定する方法としては、従来より誘導法が用いられている。誘導法には双極誘導と単極誘導とがあるが、本実施形態では単極誘導を用いる。すなわち、一方のセンサ部1を心臓の近くに置き、他方のセンサ部1を心臓から距離的に遠い部位(手、足等)に置いて体内の微弱電流を測定することで、心電(心起電力)を測定することができる。
【0031】
また、制御演算部303では、求めたインピーダンス値と、既入力済みの年齢、身長、体重、性別等の情報とに基づいて、体脂肪または骨密度を求める。
【0032】
なお、2つの発光装置11,11より複数の適当な波長の光(複数の近赤外光)を照射して、近赤外光の受光が可能な受光装置12,12からの信号解析に基づいて、血中酸素濃度や血糖値も同時に測定することができる。
【0033】
また、図示は省略しているが、センサ部1が焦電センサである場合には、親指を耳のそばに近づけて、焦電センサにより耳の中を測定することで、体温も測定することが可能である。
【0034】
制御演算部303では、これらの演算結果を表示装置306に表示するとともに、記憶装置305に記憶される。
また、心電、血圧(最高血圧、最低血圧)、脈拍、脈波、体温、体脂肪、骨密度、血中酸素濃度及び血糖値等の演算結果は、通信モジュール307を用いて他の外部装置に対して送受信するようにしてもよい。
【0035】
以上説明したように、人の手の形を模したロボットでは、例えば親指や人差し指等の先端付近にセンサ部1を取り付け、手をつなぐことで、生体情報をセンシングできる。このような形にすることで、介護者の歩行を手伝うような場面でもセンシング可能であるという利点がある。
【0036】
なお、上記実施形態1では、脈波のセンシングを発光装置11と受光装置12からなる光学的手法によって行っているが、脈波のセンシングのみであれば感圧素子により血管の圧力変動をセンシングする圧力的手法を用いることも可能である。
【0037】
<実施形態2>
本実施形態2は、本発明のロボットを産業用ロボットとして用いる場合の実施形態である。
【0038】
人とロボットが混在するような製造現場に設置されたロボットは、多種のセンサにより人の動きを監視しつつ作業を行うことになる。しかし、生体の情報を視覚または触覚でしか捕らえることのできない従来のロボットでは、ロボット同士は通信機能等を介して双方向通信を行うことにより、接触するようなことは基本的にない。しかし、その中に人が入った場合、人の動きが無い場合や、感熱によるセンシングでは、例えば周囲温度の関係やセンサの不調により人か物か区別できなくなる可能性が高い。従って、産業用ロボットを本発明のような生体情報をセンシングできる機能を有するロボットとすることで、触覚センサと脈波センサにより生体か否かを判別することができるので、ロボットが人に接触するといった事故を予防することができる。
【0039】
<実施形態3>
本実施形態3は、本発明のロボットをペット型ロボットまたはアミューズメント用ロボットとして用いる場合の実施形態である。
【0040】
ペット型ロボットが普及するにつれ、ロボット側でも人の体調や精神状態により対応できる方がより高機能化できる。そのため、本発明に係わるセンサ部1を取り付けることで、例えばペット型ロボットでは、主人に抱かれているときに主人の身体状態をチェックすることが可能となる。そして、その情報を元に、適当なプログラムを選択し、主人の気に入る振る舞いをするようにすればよい。また、センシングした値が異常値を検出した場合には主人に警告し、主人の反応がなければ、ネットワーク機能を用いて緊急である旨通報するように構成することができる。
【0041】
また、アミューズメント用ロボットでも同様に、人の身体状態を把握することによりプログラムを選択することにより、最適なサービスの提供が可能となる。
【図面の簡単な説明】
【0042】
【図1】本発明に係わる生体情報をセンシングするセンサ部の一構成例を示す概略平面図である。
【図2】センサ部をロボットの指先部分に取り付けた状態を示す説明図である。
【図3】本発明の係わるセンサ部を搭載したロボットのシステム構成を示すブロック図である。
【図4】酸化ヘモグロビンの吸光特性を示すグラフである。
【符号の説明】
【0043】
1 センサ部
6 アンプ
7 フィルタ回路
11 発光装置
12 受光装置
13 フレキシブル基板
14 絶縁部
15 電流印加用電極
16 電圧検知用電極
301 電流源
302 電圧計
303 制御演算部(CPU)
304 記憶装置(RAM/ROM)
305 入力装置
306 表示装置
307 通信モジュール
308 機構制御部
【特許請求の範囲】
【請求項1】
ロボットの構成部分のいずれかに生体情報をセンシングできる機能を有するセンサが設けられていることを特徴とするロボット。
【請求項2】
前記センサのセンシング部分がロボットの生体と接触する部分に設けられていることを特徴とする請求項1に記載のロボット。
【請求項3】
前記センサによりセンシングされる生体情報が、心電、血圧、脈拍、脈波、体温、体脂肪、骨密度、血中酸素濃度、血糖値の少なくとも1つ以上であることを特徴とする請求項1または請求項2に記載のロボット。
【請求項4】
前記センサが発光装置と受光装置の組み合わせからなり、前記脈拍は、酸化ヘモグロビン、ヘモグロビンの吸光特性を利用して前記センサでセンシングすることにより測定することを特徴とする請求項3に記載のロボット。
【請求項5】
前記センサが感圧素子からなり、前記脈拍は、前記感圧素子によりセンシングすることで測定することを特徴とする請求項3に記載のロボット。
【請求項6】
前記血圧は、心電と脈波の時間差より演算により求めることを特徴とする請求項3に記載のロボット。
【請求項7】
前記血圧は、体の2つの測定部位の間の脈波伝播速度の違いにより求めることを特徴とする請求項3に記載のロボット。
【請求項8】
前記脈波は、発光装置と受光装置の組み合わせからなるセンサを用い、酸化ヘモグロビン、ヘモグロビンの吸光特性を利用して前記センサでセンシングすることにより測定することを特徴とする請求項6または請求項7に記載のロボット。
【請求項9】
前記脈波は、感圧素子による圧力変動により測定することを特徴とするロボット
【請求項10】
前記センサが発光装置と受光装置の組み合わせからなり、前記血中酸素濃度は、前記センサで複数の光の波長を用いることにより血液内の酸化ヘモグロビン、ヘモグロビンの吸光度を測定することで求めることを特徴とする請求項3に記載のロボット。
【請求項11】
前記体脂肪または骨密度は、2つの測定部位の間に電流を流し、その2点間の電圧より生体のインピーダンスを測定することで求めることを特徴とする請求項3に記載のロボット。
【請求項12】
前記心電は、体の2点間の部位を誘導法により測定することにより求めることを特徴とする請求項3に記載のロボット。
【請求項13】
前記センサが焦電センサからなり、前記体温は、前記焦電センサにより耳の中を測定することで求めることを特徴とする請求項3に記載のロボット。
【請求項14】
前記センサが複数の近赤外光源及び受光素子からなり、前記血糖値は、前記センサにより非侵襲で測定することを特徴とする請求項3に記載のロボット。
【請求項15】
ネットワーク接続機能を備えていることを特徴とする請求項1ないし請求項14のいずれかに記載のロボット。
【請求項16】
前記ネットワーク接続機能を利用して他の機器の情報を取得可能であることを特徴とする請求項15に記載のロボット。
【請求項1】
ロボットの構成部分のいずれかに生体情報をセンシングできる機能を有するセンサが設けられていることを特徴とするロボット。
【請求項2】
前記センサのセンシング部分がロボットの生体と接触する部分に設けられていることを特徴とする請求項1に記載のロボット。
【請求項3】
前記センサによりセンシングされる生体情報が、心電、血圧、脈拍、脈波、体温、体脂肪、骨密度、血中酸素濃度、血糖値の少なくとも1つ以上であることを特徴とする請求項1または請求項2に記載のロボット。
【請求項4】
前記センサが発光装置と受光装置の組み合わせからなり、前記脈拍は、酸化ヘモグロビン、ヘモグロビンの吸光特性を利用して前記センサでセンシングすることにより測定することを特徴とする請求項3に記載のロボット。
【請求項5】
前記センサが感圧素子からなり、前記脈拍は、前記感圧素子によりセンシングすることで測定することを特徴とする請求項3に記載のロボット。
【請求項6】
前記血圧は、心電と脈波の時間差より演算により求めることを特徴とする請求項3に記載のロボット。
【請求項7】
前記血圧は、体の2つの測定部位の間の脈波伝播速度の違いにより求めることを特徴とする請求項3に記載のロボット。
【請求項8】
前記脈波は、発光装置と受光装置の組み合わせからなるセンサを用い、酸化ヘモグロビン、ヘモグロビンの吸光特性を利用して前記センサでセンシングすることにより測定することを特徴とする請求項6または請求項7に記載のロボット。
【請求項9】
前記脈波は、感圧素子による圧力変動により測定することを特徴とするロボット
【請求項10】
前記センサが発光装置と受光装置の組み合わせからなり、前記血中酸素濃度は、前記センサで複数の光の波長を用いることにより血液内の酸化ヘモグロビン、ヘモグロビンの吸光度を測定することで求めることを特徴とする請求項3に記載のロボット。
【請求項11】
前記体脂肪または骨密度は、2つの測定部位の間に電流を流し、その2点間の電圧より生体のインピーダンスを測定することで求めることを特徴とする請求項3に記載のロボット。
【請求項12】
前記心電は、体の2点間の部位を誘導法により測定することにより求めることを特徴とする請求項3に記載のロボット。
【請求項13】
前記センサが焦電センサからなり、前記体温は、前記焦電センサにより耳の中を測定することで求めることを特徴とする請求項3に記載のロボット。
【請求項14】
前記センサが複数の近赤外光源及び受光素子からなり、前記血糖値は、前記センサにより非侵襲で測定することを特徴とする請求項3に記載のロボット。
【請求項15】
ネットワーク接続機能を備えていることを特徴とする請求項1ないし請求項14のいずれかに記載のロボット。
【請求項16】
前記ネットワーク接続機能を利用して他の機器の情報を取得可能であることを特徴とする請求項15に記載のロボット。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2006−26209(P2006−26209A)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願番号】特願2004−211585(P2004−211585)
【出願日】平成16年7月20日(2004.7.20)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.万歩計
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願日】平成16年7月20日(2004.7.20)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.万歩計
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
[ Back to top ]