
位置の確認
【課題】測位の計算量および電力消費を最小化しつつ、最も可能性が高い候補(または複数の候補)を迅速に選択することができる電子デバイスの位置の指標を決定する方法を提供する。
【解決手段】デバイスによって、衛星測位システムの1つまたは複数の衛星から送信された無線信号を受信し、無線信号に関する情報を得る。この情報から、信号が受信された時のデバイスの真の位置に関して、複数の仮定を得る。無線信号に関する情報と仮定との間の一致度を評価して、評価の結果に基づき、仮定のうちの1つまたは複数を選択する。選択された1つまたは複数の仮定の指標を出力する。
【解決手段】デバイスによって、衛星測位システムの1つまたは複数の衛星から送信された無線信号を受信し、無線信号に関する情報を得る。この情報から、信号が受信された時のデバイスの真の位置に関して、複数の仮定を得る。無線信号に関する情報と仮定との間の一致度を評価して、評価の結果に基づき、仮定のうちの1つまたは複数を選択する。選択された1つまたは複数の仮定の指標を出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衛星測位システムに関する。本発明は、特に、仮定の確認による衛星測位レシーバの位置に関する情報を決定するための、方法および装置に関する。
【背景技術】
【0002】
様々な種類の衛星測位システムが、当該技術分野において知られている。これらは、また、全地球航法衛星システム(GNSS:Global Navigation Satellite System)としても知られている。このようなシステムの良く知られた例は、全地球測位システム(GPS:Global Positioning System)である。他の例としては、欧州連合のガリレオ(Galileo)システムや、ロシアのシステムGLONASSが挙げられる。
【0003】
これらのシステムは、全て、同様の原理で動作する。一意に識別可能な信号が、各衛星によって、正確に同期して、送信される。レシーバは、複数の異なる衛星からの信号を検出し、かつ、それらの相対的な到達時間を測定する。到達時間の差は、各衛星からレシーバまでの様々な距離に対応する。十分な衛星からその相対距離を確立すること、およびこれらの衛星のそれぞれの位置を知ることにより、レシーバは、三辺測量によって自身の位置を決定することが可能である。
【発明の概要】
【発明が解決しようとする課題】
【0004】
衛星測位は、位置を決定するために、比較的複雑なハードウェアおよび計算処理を必要とする。衛星測位レシーバは、非常に弱い衛星信号を、非常に高い精度で検出可能でなければならない。一般的に、正確な位置を明確に決定するためには、低速およびエネルギー多消費型となる場合もある。
【課題を解決するための手段】
【0005】
本発明の態様によると、電子デバイスの位置の指標を決定する方法が提供され、方法は、
デバイスによって受信された無線信号に関する情報を得るステップであって、無線信号は、衛星測位システムの1つまたは複数の衛星からの送信を含み、この情報から、信号が受信された時のデバイスの真の位置に関して推定可能である、ステップと、
デバイスの真の位置に関する複数の異なる仮定を得るステップであって、各仮定は、2つ以上の空間次元内の位置と、位置の組と、位置の範囲とのうちの少なくとも1つを含む、ステップと、
複数の仮定を評価するステップであって、無線信号に関する情報と仮定との間の一致度を評価することを含む、ステップと、
評価の結果に基づき、仮定のうちの1つまたは複数を選択するステップと、
選択された1つまたは複数の仮定の指標を出力するステップと、を含む。
【0006】
これは、位置を決定する問題に対する、実質的に異なる手法を表す。”私はどこにいるか?”という質問をする代わりに、”私は位置Aまたは位置Bにいるか?”と質問することができる。応答は、どちらがより真である可能性が高いかの指標とすることができる。(複数の位置が真の位置である可能性が等しい場合には、これら複数の位置が返される場合もあることに留意すべきである。)
【0007】
これは、例えばデバイスがその場所に応じて異なる方法(例えば、異なるモード)で動作するように構成されている場合に、有用となる場合もある。例えば、電話のユーザが職場にいる際に、個人通話(友人および家族からの)を自動的にボイスメールに転送するように、携帯電話を構成してもよい。このような応用には、正確な位置フィックスを有することは必要ではなく、仮定”職場にある”が、偽よりも真である可能性が高いか否かが分かれば十分な場合もある。
【0008】
測位の問題をこのように定式化することにより、処理負荷のいくらかを除去することができる。この手法によって、位置の決定に用いられる方法に、より高い柔軟性をもたらす場合もある。位置を一意に決定するために通常必要とされる計算の全ては、行う必要がない場合もある。代わりに、計算量および電力消費を最小化しつつ、最も可能性が高い候補(または複数の候補)を迅速に選択することが可能な場合もある。これは、携帯デバイスに、電池寿命を増加させるか、あるいは、逆に同じ電池寿命で、コストおよび/または重量を減少させる場合もある。
【0009】
他の利点は、測位信号の制限された品質または利用可能性にもかかわらず、有用な測位機能が提供可能な場合もある点である。例えば、わずか1つまたは2つの衛星信号に基づいて、位置仮定を判別可能にする場合もある。一般に、従来の衛星測位は、少なくとも4つの衛星から、十分に強い信号を必要とする。
【0010】
質問”私は位置Aまたは位置Bにいるか?”の定式化は、また、プライバシーの保護にも有益となる場合もあるが、位置のみが確認され、これによって明かされる情報は最小限である。位置Aまたは位置Bの住所または正確な地理座標を明かす必要はない。仮定”位置A”の受け入れは、必ずしも、電子デバイスが正確に一意の位置Aにいることを意味するものではなく、電子デバイスが、他方の位置Bよりも位置Aにいる可能性が高いと決定されたことを意味するだけである。例えば、たとえデバイスがロンドンの端のヒースロー空港に位置していても、ロンドンの中心にいるという地点仮定は、チューリッヒの中心にいるという地点仮定よりも一致する。
【0011】
好ましくは、したがって、いくつかの応用において、複数の仮定と関連付けられた場所は、上記方法によって出力されない。同様に、”自宅”および”会社”などの、論理ラベルの形態で、上記方法に複数の仮定が入力してもよい。これらのラベルは、メモリ内で、地理的な場所と事前関連付けされてもよく、これは、仮定を評価可能にする。メモリは、暗号化または保護されてもよいので、場所は外部からアクセス可能ではない。よって、本発明に係る方法を用いた電子デバイスにおいて、ユーザインターフェイスは、仮定についての論理ラベルの入力および出力のみに関して動作可能であってもよい。よって、場所に関する実際の地理座標は、ユーザから隠れる。
【0012】
決定される位置は、電子デバイスの現在位置であるか、または遡及的に決定される履歴位置であってもよいことに留意すべきである。
【0013】
好ましくは、複数の仮定を評価するステップは、少なくともある程度は、各仮定を評価することを含んでもよい。
【0014】
無線信号に関する情報は、無線信号自体の一部、信号から抽出(復号)されたメッセージ、または信号から得られた測定値を含んでもよい。特に、情報は、任意で中間周波数(IF)に対するダウンコンバージョンの後に、デジタルサンプリングされた信号の断片を含んでもよく、または、距離測定値(拡散コードのコード位相、または擬似距離等)を含んでもよい。中間周波数は、ゼロまたはゼロ以外であってもよい。情報は、1つまたは複数の衛星を明確に識別する情報を含んでもよく、この衛星の送信は、無線信号内で検出可能である。この場合には、情報は、無線信号が受信された位置の識別特性を、黙示的または明示的に、捕捉する。
【0015】
情報と仮定の一致度は、得られた情報を予期された情報と比較すること、例えば予想値を実際の測定値と比較すること、によって評価してもよい。ここで、”一致”とは、情報が真である仮定と合致することを意味する。
【0016】
選択された1つまたは複数の仮定は、真である可能性が最も高い、または偽である可能性が最も低い、と決定されたものであってもよい。
【0017】
1つまたは複数の仮定を、その(または各)仮定をサポートする肯定的(確証的)証拠に基づき、真である可能性が最も高いとみなしてもよい。仮定は、その(または各)仮定を否定する否定的(反対)証拠の欠如により、偽である可能性が最も低いとみなしてもよい。
【0018】
他の実施形態において、選択された1つまたは複数の仮定は、真である可能性が最も低い、または偽である可能性が最も高いものとなり得る。この”否定的”情報は、それでも、ユーザ(またはソフトウェアアプリケーション)に、電子デバイスの位置に関する有用な情報を提供することができる。否定的選択は、1つまたは複数の位置仮定の選択であってもよく、この位置仮定の選択は、仮定が偽である可能性が高いという証拠が最も多い、および仮定が真である可能性が高いという証拠が最も少ない、ことを根拠とするものである。例えば、2つの仮定”自宅内にある”と”病院内にある”の場合には、方法は、利用可能な証拠が、仮定”病院内にある”に相反する場合には、デバイスが”病院内にはない”という否定的指標を有用に出力することができる。
【0019】
複数の仮定を評価するステップは、信号に対して検索を行って、少なくとも1つの衛星からの送信を検出するステップを含んでもよく、検索の少なくとも1つのパラメータは、仮定の少なくとも1つに依存する。
【0020】
すなわち、仮定によって提供される位置情報を用いて、検索をガイドしてもよい。例えば、数値を有するパラメータに関して、検索の開始点および/または検索範囲を、候補位置に基づき選択してもよい。
【0021】
任意で、検索の少なくとも1つのパラメータが、2つ以上の仮定に依存して選択される。例えば、検索パラメータを選択してもよいが、これは、複数の仮定を確証もしくは拒絶する、または仮定もしくはまとまりのない仮定の組を判別する可能性を有するためである。2つ以上の仮定のうちのいずれかが変化した場合には、方法の動作を修正してもよい。
【0022】
検索中に、複数の仮定の1つ目に応じた位置で検出可能と予想された衛星からの送信の検出を優先してもよい。
【0023】
検索は、他のソースの検出を試みる前に、予期されるソースの検出を試みることを含んでもよい。あるいは、または加えて、検索は、予期されるソースの検出のために、他のソースと比べてより大きな努力を費やすことを含んでもよく、これは例えば、予期されるソースに関する相関ベースの検索の積分時間を増加することによる。
【0024】
検索中に、複数の仮定の2つ目に応じた位置で検出不可能と予想された衛星からの送信の検出を優先してもよい。
【0025】
これは、2つ目の仮定を反証する試みとして理解されてもよい。衛星送信が、第2の仮定と関連付けられた1つまたは複数の位置で水平線より下の衛星から受信された場合には、これは、この仮定が偽であることの強い証拠である。
【0026】
任意で、第1の仮定の下で検出可能であり、かつ、第2の仮定の下で検出不可能であると予想された、衛星の検出を優先してもよい。これは、この衛星信号の有無が、2つの仮定を強力に判別するものであることを意味する。
【0027】
上記の優先順位付けの手法は、仮定を評価し、かつ、結論に達するために、必要な計算量、エネルギー、および/または時間の減少に役立つであろう。
【0028】
検索の少なくとも1つのパラメータは、好ましくは、少なくとも1つの衛星からの送信の予想周波数と、このような予想周波数の予想ドップラーシフトと、少なくとも1つの衛星によって使用された既知の拡散コードと、少なくとも1つの衛星によって送信された信号が受信される予想タイミングと、このような信号が受信される際に有する予想信号強度と、少なくとも1つの衛星のデータメッセージ内の予想ビットパターンと、の少なくとも1つを含む。
【0029】
衛星信号が受信されるタイミングは、タイミング測定または距離測定のいずれかとして表されてもよいが、それは、到着時刻が、固有にリンクされて、衛星からレシーバまでの距離内に収まるからである。
【0030】
距離測定は、例えば、コード位相、搬送波位相、または擬似距離測定を含んでもよい。一般的に、距離測定は、衛星測位レシーバから測位衛星の配置の中の1つの衛星への距離に関するいくつかの情報を(黙示的または明示的に)提供する、値である。距離測定は、距離によって、あるいは信号の飛行時間または到着時刻によって、表してもよい。距離測定の多くの種類は、絶対または一意の測定ではなく、それらは、典型的には、ある程度の相対性または曖昧さを包含する。例えば、コード位相測定は、それ自体によって、単一のコードエポック(epoch)(すなわち、拡散コードの1つの完全な反復内にあるもの)のみを基準として、(相対的な)到着時刻を指定する。これには、衛星データメッセージのどのコードエポックおよびどのデータビット期間が観測されているかに関する曖昧さが残る。(データビット期間は、20個の完全なコードの反復であり、これは、コードエポックよりも20倍長い。)よって、用語”距離測定”は、ある程度の曖昧さを含む測定と、絶対および/または一意の距離測定との両方を含む、と理解すべきである。同様に、データメッセージ内のビットエッジのタイミングまたは位置は、距離測定とみなすことができるが、その理由は、これらが、例えば、コード位相測定と組み合わせることによって、曖昧さを減少させ、かつ、擬似距離の取得に寄与することができるからである。
【0031】
信号が受信される際に有すると予期される予想信号強度を、例えば、予想電力で信号を検出するのに適した積算時間を選択することによって、検索パラメータとして用いることができる。信号強度または電力は、信号対雑音比(SNR)によって表してもよい。
【0032】
複数の仮定を評価するステップは、仮定の少なくとも1つに基づき、受信した無線信号の少なくとも1つのパラメータの値を予想するステップ(120)と、予想値を、パラメータの対応する測定値と比較するステップ(140)と、を含んでもよい。
【0033】
比較は、予想値と測定値の差を計算するステップと、1つまたは複数の数式を評価して、測定値が予想値と一致しているか否かを決定するステップと、のうちの1つまたは複数を含んでもよい。好ましくは、比較は、2つ以上の値の間で行われる。
【0034】
上記のように、予想され測定された少なくとも1つのパラメータは、少なくとも1つの衛星からの送信の予想周波数と、このような予想周波数の予想ドップラーシフトと、少なくとも1つの衛星によって使用された既知の拡散コードと、少なくとも1つの衛星によって送信された信号が受信される予想タイミングと、このような信号が受信される際に有する予想信号強度と、少なくとも1つの衛星のデータメッセージ内の予想ビットパターンと、の少なくとも1つを含んでもよい。
【0035】
複数の仮定を評価するステップは、少なくとも1つのパラメータの値を予想する前に、仮定を比較して、複数のパラメータのうちのどれが仮定を判別する可能性が最も高いかを決定するステップと、決定の結果に応じて、少なくとも1つの予想すべきパラメータを選択するステップと、をさらに任意で含む。
【0036】
このようにして、初期の評価に、様々な異なる仮定の最適な判別が提供される。例えば、第1の仮定が、衛星AおよびBが可視となると予想し、かつ、第2の仮定が、衛星AおよびCが可視であると予想した場合には、衛星Aからの送信の検索には、あまり意味がなく、送信の有無は、仮定の判別に役立たない。この例では、方法は、仮定を比較し、衛星Aが両者に共通であると決定し、かつ、少なくとも1つの仮定に対して一意である他の衛星(BおよびC)の検索を優先してもよい。
【0037】
このようにして予め仮定を評価することは、仮定を評価するために必要な計算量、エネルギー、および/または時間を減少させることに役立つであろう。
【0038】
各仮定は、各仮定と関連付けられた真である事前確率を有してもよく、かつ、複数の仮定を評価するステップは、最も高い確率を有する仮定を最初に評価することを含んでもよい。
【0039】
平均すると、可能性がより低い仮定の前に、可能性がより高い仮定を評価することは、結論に達するまでに要する時間の減少をもたらすであろう。証拠が、最初に評価された仮定をサポートする場合には、可能性がより低い他の仮定の検査に対して、より少ない作業を充てることができる。さらに、最初に評価された、事前の可能性が最も高い仮定に反して、証拠が迅速に出現した場合には、この過程の評価を終了することができ、そして、代わりに、リソースを(事前の可能性が低い)他の位置仮定の評価に向けることができる。これは、整合する位置仮定を見出すことにおいて、有効性および速度をさらに改善する。
【0040】
好ましくは、複数の仮定において、仮定のうちの1つは、直近に決定されたデバイスの位置(すなわち、最後の既知の位置)である。より好ましくは、各仮定は、(上述のように)各仮定と関連付けられた真である事前確率を有しており、かつ、直近に決定された位置の仮定には、最も高い確率が割り当てられる。
【0041】
換言すると、直近に決定された位置は、好ましくは、仮定の1つであり、かつ、好ましくは、最初に評価された仮定である。これは、最後に位置が決定されてからデバイスが動いてないという確信を反映する。
【0042】
真である可能性が最も高い1つまたは複数の仮定は、完全な位置フィックスが無線信号から計算される前に、選択して出力することができる。
【0043】
これは、位置フィックスを一度も計算せずに、可能性が最も高い仮定を選択して出力することを含んでもよい。あるいは、これは、仮定の選択および出力の後に、後段で位置フィックスを計算することを含んでもよい。
【0044】
位置フィックスを計算することは、衛星の位置の情報と、電子デバイスから衛星までの距離測定の情報と、に基づいて、三辺測量によって電子デバイスの位置を計算することを含んでもよい。典型的には、位置フィックスの計算は、少なくとも3つの衛星、より好ましくは、少なくとも4つの衛星、までの距離測定に依存する。
【0045】
選択された1つまたは複数の仮定の指標を出力するステップは、仮定が真である尤度を示す第1の値と、仮定が偽である尤度を示す第2の値と、第1および第2の値の相対的な大きさを示す第3の値と、の少なくとも1つを出力することをさらに含んでもよい。
【0046】
第1および第2の値は、確率値を含んでもよい。第2の値は、否定仮定のための確率値、すなわち、電子デバイスが仮定に応じた位置に位置していない(またはいなかった)、という仮定であってもよい。第3の値は、例えば、尤度比であってもよい。あるいは、または追加で、方法は、複数の仮定のうちのいずれも真でない、という尤度の指標を出力することを含んでもよい。これは、”ヌル(null)仮定”とみなすことができる。
【0047】
所与の仮定と関連付けられた尤度は、真である仮定の事前確率から独立して表現してもよい。あるいは、事前確率が既知(または推定可能)である場合には、仮定の事前確率を考慮に入れて、真の事後確率を生成してもよい。
【0048】
他の仮定の事前確率および尤度などの要素を、比較関数を用いることにより考慮に入れて、各仮定の分析を選択、結合、および/または管理することができる。
【0049】
複数の仮定は、少なくとも3つの仮定を含んでもよく、これら仮定の1つは、他の仮定のいずれも真でない可能性を表す、ヌル仮定である。
【0050】
この場合には、ヌル仮定が、真である可能性が最も高い(または偽である可能性が最も低い)仮定として選択された場合において、方法は、好ましくは、衛星信号を処理して位置フィックスを計算するステップをさらに含む。
【0051】
方法のこの変形例において、仮定を検査する手法が、仮定された位置のいずれにも電子デバイスが位置していないことを明らかにした場合に限り、完全な位置フィックスが計算される。これは、電子デバイスが、新たな未知の場所に位置していることを示唆する場合がある。次いで、従来の方法で、位置フィックスを計算し、新たな場所を決定することが、有利であろう。
【0052】
この方法によって、電子デバイスが仮定された(よく知られている)場所のいずれかにある場合には、電子デバイスの位置を、迅速かつ最小の努力で確定することができる。しかし、この計算効率の高い手法が、答えを提供できない場合には、デバイスは、従来のGPS処理技術に戻る(これは、典型的にはより計算負荷が大きくなる)。全体的に、この手法は、従来の処理を常に用いるデバイスと比べて、デバイスがエネルギー消費を減少することを可能にする。
【0053】
各仮定は、2つ以上の空間次元における位置と、位置の組と、位置の範囲と、の少なくとも1つを含む。
【0054】
よって、仮定は、一意の場所、あるいは町、州、郡などの地区または地域を定義してもよい。2つの空間次元における位置は、地表上の場所を指定することができる。このような位置は、例えば、緯度座標および経度座標によって指定してもよい。3次元における位置は、緯度、経度、および高度の組み合わせによって指定してもよい。地区は、位置の組によって、例えば、地区の凸包を定義する点として位置を扱うことにより、定義してもよい。あるいは、地区は、2次元における矩形範囲、または半径と組み合わされた中心位置などの、位置の範囲によって定義してもよい。単一の仮定は、まとまりのない場所を含んでもよい。他の場合において、2つ以上の仮定が重複してもよい。例えば、1つの仮定は、もう1つの仮定のより具体的なバージョンであり、これらが階層関係を有するようにしてもよい。すなわち、1つの仮定を、他と関連付けられた場所のサブセットと関連付けてもよい。例えば、”英国”を1つの仮定としてもよく、”ロンドン”をより具体的な下位仮定としてもよい。
【0055】
各仮定は、異なる地理的位置(あるいは位置の組または範囲)と関連付けられている。すなわち、地表上の正確に同じ場所に、2つの仮定が関連することはない。これは、高さまたは高度座標のみが異なる位置(あるいは位置の組または範囲)は、まったく別の仮定とはみなされないことを意味する。
【0056】
仮定は、電子デバイスが候補位置に存在していると考えられる時間を、さらに含んでもよい。例えば、時間は、無線信号が受信された時刻または時間間隔を意味してもよい。
【0057】
仮定を評価するステップは、無線信号に関連する情報が、仮定と相反するか、またはサポートするか、を決定することを含んでもよい。情報が仮定と相反することを決定することは、候補位置で検出可能であると予想されなかった衛星からの送信が、無線信号内において検出されたと決定すること、および無線信号内において候補位置で検出可能であると予想された衛星からの送信が、無線信号内において検出されなかったと決定すること、の1つまたは複数を含んでもよい。
【0058】
また、コンピュータプログラムであって、前記プログラムがコンピュータ上で実行される際に、物理計算デバイスを制御して、上記のステップを実行するように構成されたコンピュータプログラムコード手段を備える、コンピュータプログラムが提供され、そして、このようなコンピュータプログラムは、コンピュータ読み取り可能な媒体において実現される。
【0059】
本発明のもう1つの態様によると、電子デバイスの位置の指標を決定するための装置が提供され、装置は、
衛星測位システムの1つまたは複数の衛星からの送信を含む無線信号を受信するように動作可能な衛星測位レシーバ(10,12,18)と、
前記デバイスの真の位置に関する複数の仮定を得るための入力(26)であって、各仮定は、2つ以上の空間次元内の位置と、位置の組と、位置の範囲とのうちの少なくとも1つを含む、入力と、
プロセッサ(20)であって、
受信した前記無線信号と前記仮定との間の一致度を評価することを含む、複数の前記仮定の評価を行い、
前記評価の結果に基づき、前記仮定のうちの1つまたは複数を選択し、
選択された1つまたは複数の前記仮定の指標を出力するように構成されたプロセッサと、
を備える。
【0060】
プロセッサは、衛星測位レシーバによって受信された少なくとも1つの無線信号を処理して、信号が受信された時のデバイスの真の位置を特徴付ける情報を抽出するように、さらに構成されてもよく、
プロセッサは、無線信号から抽出された情報と仮定との一致度を評価することによって、各仮定を評価するように構成される。
【0061】
以下、添付の図面を参照して、本発明の一例を説明する。
【図面の簡単な説明】
【0062】
【図1】本発明の第1の実施形態に従い動作するGPSレシーバのブロック図。
【図2】第1の実施形態に係る位置の決定方法のフローチャート。
【発明を実施するための形態】
【0063】
衛星測位を用いた位置決定に関する本発明の第1の実施形態を、これより説明する。本実施形態において、電子デバイスは、図1に示されるようなGPSレシーバである。GPSレシーバは、GPS衛星からの送信を含む無線信号を受信するように動作可能である。従来のGPSレシーバが、位置フィックスを決定するために受信信号を完全に処理するのに対して、図1のGPSレシーバは、複数の候補位置のそれぞれの妥当性を評価するために必要な程度だけ、受信信号を処理する(すなわち、デバイスの位置に関する仮定)。GPSレシーバは、次いで、真である可能性が最も高い仮定の指標を出力する。
【0064】
図1に示されるものなどのGPSレシーバの従来部位の動作の詳細は、当業者に良く知られているであろう。例えば、国際特許出願第2009/000842号に、一般的な概要が示されている。
【0065】
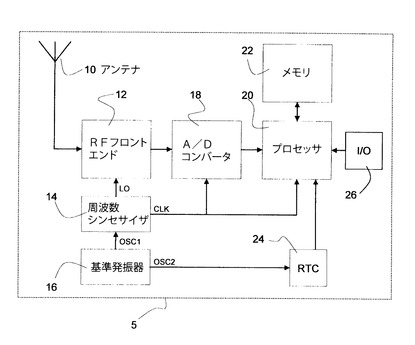
図1は、本発明の第1の実施形態に従い動作するGPSレシーバを示している。GPSレシーバ5は、RFフロントエンド12に結合されたアンテナ10を備える。RFフロントエンド12は、アンテナ10を介して受信したGPS信号を増幅するための回路を含む。RFフロントエンドは、また、帯域外干渉を減衰するためのフィルタリング回路と、ミキサとを含む。ミキサは、受信信号と、周波数シンセサイザ14により生成された局部発振器(LO)信号と、を乗算して、合計周波数での信号と、差分周波数での信号と、を生成する。周波数シンセサイザ14は、基準発振器16によって生成された高周波出力OSC1によって駆動される。本実施形態において、基準発振器16の高周波出力OSC1は、26MHzの周波数で動作する。さらなる適切なフィルタリングの後に、RFフロントエンド12での混合動作が、アナログ−デジタル(A/D)コンバータ18に入力される中間周波数(IF)信号を生成する。A/Dコンバータ18によって生成された信号サンプルは、プロセッサ20に出力されて処理される。A/Dコンバータ18とプロセッサ20の両方が、周波数シンセサイザ14により生成された高速クロック出力CLKによってクロッキングされる。RFフロントエンド12とA/Dコンバータ18のアナログ回路を、当業者に良く知られるような従来型としてもよいことに、留意すべきである。
【0066】
A/Dコンバータ18は、直交IF信号の実部および虚部をデジタル領域に変換するために、1対のA/Dコンバータを備えてもよいことに、留意すべきである。この場合には、フロントエンド12とA/Dコンバータ18との間の接続は、複雑なIQ接続であってもよい。同様に、A/Dコンバータ18によって出力される信号サンプルは、直交信号を表してもよい。しかしこれは、本発明の実施に影響せず、そして、当業者は、直交IQアナログおよびデジタル信号の操作を既に熟知しているであろう。
【0067】
本発明において、プロセッサ20は、信号が受信され、かつ、サンプリングされるとすぐに、A/Dコンバータ18から受信したサンプルを処理する。この処理を、以下により詳細に説明する。
【0068】
また、現在時刻を記録するために、リアルタイムクロック(RTC)24が設けられている。これは、信号が受信されたおおよその時刻を決定可能にする。RTC24は、基準発振器16によって生成された第2の出力OSC2によって駆動される。しかし、RTC24は、周波数シンセサイザ14に要求されるよりも低い速度で動作するため、基準発振器16内で分周器を用いて、低周波出力OSC2を提供する。このように、基準発振器16は、単一の石英結晶からマスタークロック信号を生成するマスター発振器として機能し、このマスタークロック信号に、周波数シンセサイザ14とRTC24の両方が同期される。本実施形態において、基準発振器16の低周波出力OSC2は、約26kHzの周波数で動作し、これは、約1000の分周比を示す。
【0069】
プロセッサ20は、1つまたは複数の特定用途集積回路(ASIC:application specific integrated circuit)などの、注文品のハードウェアデバイスとして実施してもよいことに留意すべきである。あるいは、プロセッサ20は、適切にプログラムされた、1つまたは複数の汎用処理ユニットまたはデジタル信号プロセッサ(DSP)を備えてもよい。どちらの代替品の実施も、十分に当業者の能力の範囲内である。
【0070】
入出力(I/O)デバイス26を、プロセッサ20に結合してもよい。これは、GPSレシーバ5のユーザ制御と、評価された後の最も妥当と選択された候補の出力と、を可能にする。この実施形態において、I/Oデバイスは、ユーザ入力用のキーパッドと、出力用のディスプレイとからなる。
【0071】
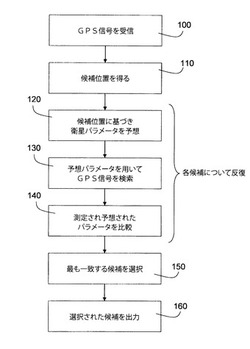
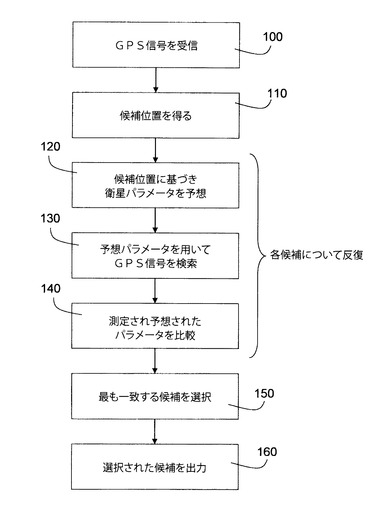
図2は、第1の実施形態に係る方法を示すフローチャートである。ステップ100において、GPSレシーバは、アンテナ10と、RFフロントエンド12とを用いて、GPS信号を受信する。結果としてのIF信号は、A/Dコンバータ18によってデジタル化され、かつ、信号サンプルがプロセッサ20に出力される。
【0072】
それとは別に、ステップ110において、プロセッサ20は、それぞれがレシーバ5の真の位置に関する仮定を表す候補位置を得る。この例では、2つの候補位置が得られる、と仮定される。もちろん、同じ方法を、より多くの数の仮定へと拡張することもできる。候補は、GPSレシーバ5のメモリ22から得られる。GPSレシーバは、ユーザが定期的に訪れる”お気に入り(favorite)”の場所のリストを、記憶することが知られている。この例では、候補位置は、最も頻繁に用いられるお気に入りを選択することによって得られる。これらの位置は、ユーザの自宅および/または職場に対応すると仮定される。各候補位置は、緯度座標と、経度座標と、を含む。各候補は、リアルタイムクロック24によって供給されるタイムスタンプとも関連付けられている。時刻の仮定は、全ての候補を通して同じであると仮定されるが、それは、決定されるべき位置が、一意の時点での電子デバイスの位置だからである。さらに、デバイスは、時間を推定する他のやり方を持たないと仮定されるため、他の競合する仮定はない。
【0073】
ステップ120、130および140において、プロセッサ20は、候補があれば、どの候補が受信したGPS信号の内容と一致するか否かを評価することにより、各仮定を評価する。これを行うために、プロセッサは、ステップ120において、デバイスが推定された時間に候補位置に位置した場合にプロセッサが観測することが予期される、1つまたは複数の衛星パラメータを予想する。次いで、プロセッサは、ステップ130において、受信したデジタル信号サンプルに対して検索を行い、対応する観測パラメータを測定する。プロセッサ20は、特定の予想パラメータを検索するために、予想に応じて検索の対象を決めることによって、より効率的に検索することができる。ステップ130において測定されたパラメータは、次いで、ステップ140において、ステップ120で得られた予想パラメータと比較される。
【0074】
ステップ120、130および140は、各仮定に対して実行される。最後に、ステップ150において、プロセッサは、予想および測定されたパラメータが最も一致する仮定を選択する。この選択された仮定は、(ステップ160において)入出力インターフェイス26を介して、結果をディスプレイに表示することにより、出力される。
【0075】
各仮定を評価する際に、ステップ120〜140において、衛星の様々なパラメータおよびそれらの送信を用いて、仮定が受信信号と一致しているか否かをチェックしてもよい。いくつかの実例を、これより説明する。
(例1―衛星の可視性)
【0076】
各位置仮定に基づき、プロセッサは、ステップ120において、可視であるべき衛星を予想する。ここで、”可視”とは、この衛星からの送信信号が、レシーバ5で受信された無線信号において検出可能であることを意味する。水平線よりも上(候補位置から見た際)の衛星は、可視のはずである。よって、どの衛星が可視であるかを予想することは、仮定された時刻および位置で、水平線よりも上にある衛星を決定することを含む。これは、衛星の軌道運動の情報を用いて行うことができ、この情報は、全ての衛星によって放送される”アルマナック(almanac)”データから、または各衛星によって放送される、自身の軌道を述べるより正確な”エフェメリス(ephemeris)”データから、得られる。アルマナックおよび/またはエフェメリスデータは、十分に長い期間にわたり、衛星のデータメッセージを復号することにより、得られる。あるいは、補助GPS(AGPS:Assisted GPS)として知られる技術において、この情報を、別々の通信チャネルにわたって提供してもよい。可視性を予想するために、比較的古いアルマナックまたはエフェメリスデータでも、用いることができることに、留意すべきである。その有効性の通常の範囲の外にあるデータは、やや不正確である可能性があるが、しかし、衛星が水平線上にあるか否かなどの大まかな予想に対しては、小さな不正確さが著しく影響する可能性は低い。例えば、誤差のマージンを用いて、水平線に近い衛星を対象から外すことができる。
【0077】
可視であると予想された衛星の組は、最大で32個のGPS衛星の完全な配置のサブセットとなる。GPSシステムの設計によると、地球上の全ての場所において、常に少なくとも4つの衛星が可視のはずである。しかし、多くの場合には、4つ以上が利用可能である。
【0078】
可視であると予想されたGPS衛星のサブセットを用いて、プロセッサ20は、次いでステップ130において、GPS信号サンプルを処理し、対応する衛星信号の検出を試みる。衛星信号は、この衛星に関する拡散コードのコピーを、受信サンプルと関連付けることによって検出することができる。一般に、時間および周波数の両方において、ある範囲にわたって一致を検索する必要がある。したがって、検索は、計算負荷が大きい。この例では、プロセッサは、既に可視と予想されている衛星のみを検索することにより、その計算量を減少させる。
【0079】
このステップ130は、各仮定に対して行われる。しかし、各衛星は、1度だけ検索すればよい。いくつかの衛星は、2つ以上の仮定位置で可視であることが予想され得ることに、留意すべきである。これらの衛星は、仮定を判別するためには有用性が低い。よって、可能であれば、最初に、適切な仮定のサブセットに一意である衛星を検索することが好ましいであろう。これは、可能な限り迅速かつ有効に、レシーバが仮定を判別することを可能にするであろう。例えば、”自宅”位置から、衛星1、4、6、および20が可視であると予想され、かつ、”会社”位置から、衛星4、6、18、および20が可視であると予想される場合には、プロセッサは、衛星1および18の検索を優先してもよい。
【0080】
プロセッサは、次いでステップ140において、予想された衛星のリストを、見つかった衛星のリストと比較する。プロセッサは、ステップ150において、結果に基づき最も可能性が高い仮定を選択する。この選択は、見つかった予想衛星の絶対数、または見つかった予想衛星の比率、またはいくつかの他の類似の基準に基づいてもよい。見つかった衛星の(絶対または相対)数は、信頼測定値として用いてもよく、この信頼測定値は、仮定が真である可能性はどの程度かを示す。このインジケータは、選択された仮定と共に出力してもよい。
【0081】
プロセッサは、また、デジタル信号サンプルに対して、可視であることが予想されなかった衛星の検索を行なってもよい。しかし、プロセッサは、このタスクに対して、比較的により少ない作業を充ててもよく、例えば、より短い積分時間を、予期されない衛星の相関検索に用いてもよい。この検索は、よって、予期される可視衛星の検索よりも感度が低く、かつ、比較的強い衛星信号のみを見つけるであろう。可視であると予想されない強い衛星信号を見つけることは、仮定が偽であることを示唆する。したがって、見つけられた予期されない衛星信号の数を、仮定が偽である尤度の基準として用いてもよい。この”偽”の基準を、選択された仮定と共に出力してもよい。あるいは、信頼基準と偽の基準の相対値を表す、第3の基準を構築してもよい。例えば、信頼基準の、偽の基準に対する割合を、出力してもよい。
【0082】
予期される信号の検索が高い感度である場合には、相互相関の問題を避けるために、予期されない信号の検索が必要となり得ることに、留意すべきである。これは、GPSで用いられるような拡散コードの不可避な副作用であり、見掛けの信号強度が著しく弱くなるが、誤った拡散コードを用いて信号が検出されることがある。これは、実際には、異なる衛星で用いられるコード間の相互相関がゼロでないために起こる。GPS L1 C/Aコードの場合には、正しい拡散コードを用いた場合よりも約25dB弱いレベルで、誤った信号を検出可能であることが、一般的である。したがって、所与の衛星SV1の拡散コードを検索する場合には、無線信号に衛星の送信が存在しなかったとしても、レシーバは、(たまたま可視であり、かつ、比較的強い)異なる衛星SV2の拡散コードとの相互相関を介して、なおもこの拡散コードを弱く検出するように見える場合もある。相互相関の軽減は、当該技術分野において知られており、典型的には全ての可能なSV信号の検索を伴う。検索は、比較的短い積分時間を用いることができるが、それは、強い信号のみを対象とするためであり、結果として、この検索は比較的迅速となり得る。同じ特性(例えばドップラーシフト、コード位相等)を共有する、続いて検出される任意の弱い信号は、より強い信号と重複するため、無視することができる。
【0083】
一般に、仮定が偽である尤度を評価することは有用であるが、これは、時には、仮定のいずれも真ではないためである。すなわち、GPSレシーバ5は、いずれの候補位置にも位置しないことがある。これが当てはまる場合の指標を、出力することが望ましい。
【0084】
多くの場合には、候補位置は、衛星の可視性のみに基づいて区別するには、互いに近すぎる。一般に、著しく異なる衛星の組が、可視であると予想されるには、候補は、大きく離れている必要がある。よって、衛星の可視性が、英国内の場所がスイス内の場所から区別できる一方で、例えば、英国内の2つの場所を、互いに区別できないかもしれない。この場合には、以下の例のいずれかに説明されるようなさらなる処理が必要となる。
(例2―信号強度)
【0085】
任意で、予想および観測された可視の衛星のリストを比較することに加えて、プロセッサ20は、各可視衛星から受信された信号の相対強度を比較することもできる。信号強度は、信号対雑音比(SNR:Signal-to-Noise Ratio)によって測定することができる。信号強度は、水平線より上の衛星の迎角(他の要素のなかでも特に)に依存して変化する。よって、測定された信号と、予想された信号と、を比較することによって、1つの位置を他と区別することが可能となる。米国特許第2010/032057号は、迎角に依存するSNRを予想するためのモデルを述べている。GPSレシーバにおけるアンテナのアンテナ利得パターンも考慮すべきであることに、留意すべきである。好ましくは、アンテナは、固定の向きに配置すべきであり、例えば、カーナビゲーションシステムのアンテナの主極は、垂直に上方を向いてもよく、かつ、アジマス方向への変化がほとんどなくてもよい。これは、自動車が向く方向が、観測される信号強度に影響しないことを意味する。
【0086】
例1と比べて、最小の追加の処理が必要であることに、留意すべきである。相関ベースの衛星信号の検索が既に行われているとすると、信号強度は、相関関数のピークの大きさから得られる。
(例3―ドップラーシフト)
【0087】
上述のように、特定の衛星の信号の検索は、一般に、時間遅延(コード位相)および周波数の範囲での検索を伴う。周波数の不確実性は、いくつかの要因によって起き、この要因は、基準発振器16の周波数の規則的なオフセットまたはドリフトと、衛星とレシーバとの間の相対運動に起因するドップラーシフトと、を含む。規則的オフセットまたはドリフトは、全ての衛星に対して同じである。一方、個別の受信衛星信号の間で観測される相対周波数差は、衛星とレシーバとの間の相対速度の特性となる。衛星の軌道の情報に基づき、プロセッサは、ステップ120において、各候補位置で、可視と予想される各衛星に対するドップラーシフトを予想することができる。次いで、プロセッサは、ステップ130において、各衛星信号の観測周波数と、予想されたドップラーシフトと、を比較して、どれが最も一致しているかを決定することができる。
【0088】
上述の例1および2と比べて最小の追加の処理を必要とすることに、留意すべきである。相関ベースの衛星信号の検索が既に行われているとすると、衛星の信号の観測周波数は、周波数次元において、相関関数におけるピークの位置から既に知られている。
(例4―距離測定)
【0089】
場合によっては、上述の技術のいずれも、候補を分離するための十分な判別を提供しない。あるいは、候補の選択(または全ての候補の拒絶)において、高レベルの信頼度を有することが望まれる場合がある。このような場合には、以下において、各仮定のより詳細な評価が、望ましいであろう。
【0090】
この例では、2つの候補位置が、予期される衛星の同一のリストを生成し、かつ、予期される衛星の全てが、受信した無線信号のサンプルに見出された、と仮定する。
【0091】
プロセッサ20は、ステップ120において、各候補位置に対して、少なくとも2つの衛星に関する擬似距離を予想する。これは、各衛星の軌道位置を決定し、かつ、この軌道位置から候補位置への距離を、次式を用いて計算することにより、行うことができる。
(Xs−Xh)2+(Ys−Yh)2+(Zs−Zh)2=Rp
【0092】
ここで、X、Y、およびZは、3次元での空間座標であり、下付き文字Sは、衛星の位置を示し、下付き文字hは、仮定位置の1つを示す。Rpは、衛星と仮定位置との間の予想距離である。
【0093】
プロセッサ20は、次いで、これら衛星の実際の擬似距離を、従来のやり方で測定する。実際の擬似距離を測定する際には、予想される擬似距離を、開始点として使用出来ることに、留意すべきである。例えば、拡散コードのコード位相、衛星データメッセージのビットエッジのタイミング、および/またはデータメッセージ内のビット位置を、全て予想することができる。それでも、これらの予想が検索に役立つ範囲は、レシーバのタイミング精度(およびレシーバが候補位置にあるかどうか)に依存する。レシーバでの時刻推定が非常に正確である場合には、どの信号がその時点で候補位置に到着すると予想されるかを、非常に正確に予想できる。時間推定が不正確な場合には、予想は、同様に不正確となる。不正確さがある限り、予想の両側で、不正確さの有限の範囲内での検索を行う必要がある。しかし、ひとたび1つの衛星信号が検出されると、次の信号の検索の開始点は、第1の信号の検出タイミングに対して調整することができる。プロセッサが、これらの他の信号を、最初に検出された信号に対する特定のオフセットで見つけることが予期されるため、その後の信号の検索範囲も、仮定が真である場合には、狭められる可能性があり、または仮定が偽である場合には、それらは全く見つからないであろう。
【0094】
プロセッサは、ステップ140において、予想された疑似距離と、測定された擬似距離と、を比較する。一般的に、測定値でのタイミング(よって範囲)の不確実性のため、値の対は等しくならないことに、留意すべきである。しかし、これは、タイミング(または範囲)バイアスが、両方の衛星に対して同じか否かをテストすることによって、適応させることができる。これは、次式で2回評価することによって、行うことができる。
Rp=R−ΔR
【0095】
ここで、Rは、測定される擬似距離であり、ΔRは、レシーバでのタイミング誤差に起因する(擬似距離と予想距離の間の)オフセットである。この式が、異なる衛星に対して2回評価された場合には、両方のケースで、結果として同じオフセットとなるべきである。異なるオフセットは、測定される擬似距離が仮定と合致しないことを示す。結果におけるより高い信頼度は、3つ以上の衛星に対して式を評価することによって得られるであろう。
【0096】
場合によっては、完全な擬似距離を計算する必要がない場合もあることに、留意すべきである。他の距離測定は、異なる仮定を判別するために十分となり得る。例えば、コード位相情報は、衛星の送信信号の相対タイミングを、拡散コードの各反復内で特徴付ける。コード位相は、それ自体では、完全な距離測定を提供せず、それは、どの拡散コードの反復が観測されたのかが未知のままだからである。しかし、コード位相測定値の組は、2つの異なる仮定を判別するのに、十分となり得る。
【0097】
コード位相が不十分な場合には、少量の追加の情報があればよい。例えば、衛星のデータメッセージのビットエッジの位置を検出し、かつ、予想と比較され得る制約のさらなる組を提供するために用いてもよい。
【0098】
この手法のさらなる拡張において、衛星データメッセージにおける、ビットの特定シーケンスの位置を、各仮定位置および推定時刻に基づき、予想してもよい。これらの予想を、次いで、データメッセージの実際の復調部分と比較することができる。
【0099】
距離測定または距離測定の一部が仮定に基づき予想されるような全ての場合において、予測を用いて、距離測定値の実際の測定を加速できるが、これは、検索が、予想値に近い測定値を優先できるためであることに、留意すべきである。
【0100】
上述の場合のそれぞれにおいて、仮定の選択を行うために、位置フィックスを計算する必要はなかったことに、留意すべきである。実際に、多くの場合には、従来のやり方で位置フィックスを計算する十分な情報がない場合であっても、高い信頼度を有する各仮定を確証または拒絶することが可能である。例えば、上述したように、2つの衛星に対して擬似距離を予想および測定することにより、仮定を確証または拒絶することができる。対照的に、単に2つの衛星からの信号を用いて、一意の位置フィックスを計算することは、通常は不可能である。
【0101】
他の実施形態において、本発明に係る位置確認の方法を、完全な位置フィックスの計算への前処理(precursor)として用いてもよい。例えば、電子デバイスは、ここで述べられている方法を用いて、より遅い正確な位置フィックスの計算に進む前に、あるいは、ユーザまたはソフトウェアアプリケーションが明確に要求した場合のみ、真である可能性が高い仮定を迅速に確定してもよい。
【0102】
いくつかの実施形態において、本発明に係る仮定を確認する方法を、測位方法の第1のステップとして用いてもよい。仮定のいずれも、十分な信頼度で受け付けられなかった場には、方法は、どの仮定も真でないと結論付けてもよく、よって、従来のやり方で衛星信号を用いて位置フィックスを計算する、第2のステップに進んでもよい。
【0103】
ここまで当業者には明らかであるように、上述の例は、相互排他的ではなく、かつ、有益な効果と共に、互いに組み合わせることができる。
【0104】
本発明のより高度な実施形態において、仮定の評価を最適化して、(予期される)計算負荷を最小化することができる。いくつかの仮定は、本質的に、他よりも可能性が高いことがある。各仮定の事前確率に関する情報が利用可能であれば、この情報を用いて、評価プロセスの順番を選択することができる。デバイスの最後の既知の位置は、通常、非常に可能性が高い仮定を提供するが、これは、例えば、デバイスが静止しているか、またはゆっくり動いている(仮定の間の距離に対して)可能性があるからである。この可能性が高い仮定は、最初に評価される(上の番号付けされた例で説明されたような方法を用いて)。多くの場合には、この仮定は正しく、そして、迅速かつ容易に確認することができる。次いで、他の仮定も、必要に応じて、簡単にチェックし、第1の仮定と反対の証拠がないことを保証することができる。このように優先順位付けすることとは別に、最後の既知の位置も、他の仮定と同じやり方で評価することができる。
【0105】
仮定を評価する際に、仮定と反対の証拠が見つかった場合には、方法は、直ちに他の仮定の評価に進んでもよい。例1のシナリオを用いて、衛星1、4、6、および20が、仮定された場所Aから可視であると予想される。相関検索が、衛星1の検索に失敗した場合には、方法は、衛星4、6、および20の検索を継続するよりも、直ちにもう1つの仮定された場所Bのテストに進んでもよい。すなわち、衛星1からの信号がないことに基づいて、直ちに場所Aを無視してもよい。
【0106】
上述の実施形態において、無線信号は、受信されると直ちに処理され、無線信号から得られた情報の各仮定との一致性を評価し、これにより、電子デバイスの最も可能性が高い位置を決定した。しかし、無線信号に関する情報は、代わりに、後段で処理するために記憶させてもよいことを、当業者は理解するであろう。この後段の処理は、無線信号を受信したものと同じデバイスか、または別のデバイスで行なってもよい。
【0107】
上の第1の実施形態において、図1のGPSレシーバ5は、デジタルGPS信号サンプルを、受信して直ぐに処理するように構成されていた。この実施形態の変形において、GPSレシーバは、データを処理する代わりに、データをメモリ22に記憶させるように構成してもよい。この種のGPSレシーバは、当該技術分野において、”記憶および後処理(Store-and-process)”レシーバまたは”捕捉および処理(Capture-and-Process)”レシーバとして知られている。
【0108】
このような実施形態の1つにおいて、メモリ22に記憶されるデータは、A/Dコンバータ18によって供給されるIF信号の未処理サンプルを含む。すなわち、衛星信号を検出し、距離測定を計算する処理は、サンプルが記憶される前には行われない。しかし、他の実施形態において、サンプルに対して追加の処理を行い、処理の結果として生じるデータを、メモリ22に記憶させてもよい。すなわち、受信した無線信号自体を(デジタルサンプルの形態で)記憶する代わりに、信号を分析してもよく、そして、信号の内容に関して得られた情報を、メモリ22に記憶させてもよい。例として、メモリに記憶された情報は、1つまたは複数の衛星信号に関し、検出された信号強度、コード位相、観測された周波数、搬送波位相、ビットエッジタイミング、データメッセージのいくつかのビット、または擬似距離、の1つまたは複数を含んでもよい。
【0109】
受信した無線信号を処理し、抽出情報を記憶し、続いて抽出情報を処理して仮定を評価することは、非効率となる場合があることに、留意すべきである。これは、仮定の情報を用いて、受信信号の初期の処理を(上の例で説明したように)加速できるからである。よって、”キャプチャおよびプロセス”GPSレシーバを用いる場合には、受信した無線信号の”未加工の”デジタルサンプルを記憶することが好ましいであろう。次いで、これらのサンプルを後で処理して、同時に必要な情報を抽出し、そして、各仮定を評価することができる。
【0110】
本発明に係る技術は、使用される場所に応じて異なって動作するように構成された電子デバイスに対して有用となり得る。デバイスが特別なやり方で動作するように構成されている場所は、この方法のための仮定として使用することができる。
【0111】
いくつかの応用において、異なる仮定の間に、重要性の等しいバランスがあり得る。例えば、自宅にある場合には個人通話用の着信音を使用し、会社にある間は個人通話用に無音/振動警告を使用するように、携帯電話が構成されている場合には、ユーザは、全ての種類の誤判別に対して等しい不便さを関連付ける可能性がある。すなわち、ユーザは、電話が、会社にいる間に誤って鳴った場合、または自宅で誤って無音で警告した場合には、同程度に不満を覚える可能性がある。
【0112】
他の応用において、いくつかの種類の誤りは、他よりも犠牲の大きいものとなる可能性がある。例えば、デバイスが特定の場所にあることを確実に保証する必要がある場合もある。あるいは、デバイスが特定の場所にないことを、確実に保証する必要がある場合もある。以下の実例は、このことを例示する。
1.携帯電話は、病院その他の既知の安全を重要視すべき場所では、動作すべきではない。よって、デバイスの場所を確立するための演繹法は、デバイスが安全を重要視すべき場所にないことを報告する前に、非常に高いレベルの信頼度を有するべきである。換言すると、演繹法は、慎重過ぎるぐらい慎重になるべきである。デバイスは、デバイスが指定された場所にないことの強い証拠を持ち、かつ、デバイスが指定された場所に実際にあることの反証を持たないべきである。仮定”病院内にある”が、真の尤度値および偽の尤度値と関連付けられている場合には、方法は、真の尤度に対して低い閾値を適用し、かつ、偽の尤度に対して高い閾値を適用してもよい。このようにすると、デバイスが病院内にはないことを誤って判断する可能性は低くなる。(デバイスが病院内にあると誤って判断される方が多い場合もあるが、これは、より犠牲の少ない誤りと考えられる。)
2.機密データファイルは、会社でのみ開かれるべきである。したがって、デバイスは、これらのファイルへのアクセスを許可する前に、デバイスが会社内にあることについて高いレベルの信頼度を有するべきである。デバイスが会社にあると、誤って判断することの犠牲は大きい。方法は、よって、デバイスが指定の場所にあることの強い証拠と、デバイスが実際に会社の外にあることの反証がないことと、を必要とするであろう。反証は、デバイスが会社にあるという仮定に反する証拠、または、別の合致しない仮定をサポートする証拠であってもよい。
【0113】
図面および上記の説明において、本発明を詳細に例示および説明したが、このような例示および説明は、非限定的な例示または典型であるとみなされるべきである。本発明は、開示された実施形態に限定されるものではない。
【0114】
例えば、候補位置(仮定)は、任意の適切なソースから得ることができる。これは、前の手動ユーザ入力またはセットアップ段階の間の構成、あるいは、いくつかの他のハードウェアデバイスから測位デバイスへの入力を含み得る。同様に、候補位置を、電子デバイスで実行されるソフトウェアアプリケーションによって、このデバイスに内蔵される測位サブシステムに対して提供してもよい。
【0115】
状況によっては、本発明を用いて、各仮定の下で、正確な物理的場所を保護または隠すことができる。これは、上述したように、データ保護またはプライバシー目的に有用となり得る。1つのそのような実施形態において、メモリ22は、複数の位置仮定のそれぞれをラベルと関連付けるルックアップテーブルを含んでいる。入出力デバイス26は、これらのラベルを用いて、仮定を参照する。よって、方法により仮定が選択され、かつ、I/Oインターフェイス26を介して出力されると、ラベルのみが識別される。下にある実際の地理座標は、隠されたままである。仮定は、それらのラベルを用いて入力してもよい。例えば、ユーザは、仮定”自宅にある”、”会社にある”、および”友人の家にある”を、ユーザインターフェイスを介して入力してもよい。プロセッサ20は、この入力を受け取り、メモリ22に記憶されているルックアップテーブルを用いて、地理座標に変換する。ラベルと座標との間の関連付けは、デバイスの構成段階の間に事前定義されていてもよい。例えば、メモリ22内のルックアップテーブルを作成または編集するために、パスワード認証を要求してもよい。測位方法によって1つまたは複数の仮定が選択されている場合には、プロセッサ20は、メモリ22内の関連ラベルを検索し、かつ、I/Oインターフェイス26を介してこれらのラベルを出力する。
【0116】
先に上述した実施形態は、GPS L1信号を用いた実施に焦点を合わせている。しかし、述べられた技術は、他のGPS信号(例えばL2またはL5信号)と共に適用することもでき、あるいは欧州連合のガリレオシステムまたはロシアのシステムGLONASSなどの、他の衛星測位システムと共に用いることもできる。いくつかの実施形態において、2つ以上の異なるGNSSサービスの組み合わせからの信号を活用して、仮定を評価してもよい。これは、例えば、各個別サービスから不完全な信号の組が受信され、任意の1つのサービスを用いて位置フィックスを計算すること(または満足のいくように仮定を評価すること)が可能でないような場合に、有効な場合がある。異なる衛星配置(または異なるGNSSサービス)からの信号を活用することは、一般に、仮定を評価する際の結果の信頼度を高める。
【0117】
特許請求される発明を実施するに際して、当業者は、図面、開示、および添付の特許請求の範囲を検討することにより、開示された実施形態の他の変形を理解および達成できる。特許請求の範囲において、”備える”という語は、他の要素またはステップの存在を除外せず、不定冠詞”1つの(”a”または”an”)”は、複数性を除外しない。1つのプロセッサまたは他のユニットが、特許請求の範囲において列挙されるいくつかの項目の機能を満たしてもよい。機能は、1つの集積化電子デバイスで実行してもよく、あるいは機能を、異なる個別のデバイスに分散してもよい。例えば、いくつかの機能を、有線ネットワーク接続または無線ネットワーク接続を介してアクセスされる遠隔サービスによって実行してもよい。特定の手段が、互いに異なる従属請求項において列挙されているという単なる事実は、これらの手段を有利に組み合わせて用いることができないということを示さない。コンピュータプログラムを、他のハードウェアと共に、またはその一部として供給される、光記憶媒体またはソリッドステート媒体などの適切な媒体で、記憶/配布してもよいが、インターネットまたは他の有線または無線の電気通信システムを介するなど、他の形態で配布してもよい。特許請求の範囲におけるどの参照符号も、範囲を限定するものとして解釈されるべきではない。
【技術分野】
【0001】
本発明は、衛星測位システムに関する。本発明は、特に、仮定の確認による衛星測位レシーバの位置に関する情報を決定するための、方法および装置に関する。
【背景技術】
【0002】
様々な種類の衛星測位システムが、当該技術分野において知られている。これらは、また、全地球航法衛星システム(GNSS:Global Navigation Satellite System)としても知られている。このようなシステムの良く知られた例は、全地球測位システム(GPS:Global Positioning System)である。他の例としては、欧州連合のガリレオ(Galileo)システムや、ロシアのシステムGLONASSが挙げられる。
【0003】
これらのシステムは、全て、同様の原理で動作する。一意に識別可能な信号が、各衛星によって、正確に同期して、送信される。レシーバは、複数の異なる衛星からの信号を検出し、かつ、それらの相対的な到達時間を測定する。到達時間の差は、各衛星からレシーバまでの様々な距離に対応する。十分な衛星からその相対距離を確立すること、およびこれらの衛星のそれぞれの位置を知ることにより、レシーバは、三辺測量によって自身の位置を決定することが可能である。
【発明の概要】
【発明が解決しようとする課題】
【0004】
衛星測位は、位置を決定するために、比較的複雑なハードウェアおよび計算処理を必要とする。衛星測位レシーバは、非常に弱い衛星信号を、非常に高い精度で検出可能でなければならない。一般的に、正確な位置を明確に決定するためには、低速およびエネルギー多消費型となる場合もある。
【課題を解決するための手段】
【0005】
本発明の態様によると、電子デバイスの位置の指標を決定する方法が提供され、方法は、
デバイスによって受信された無線信号に関する情報を得るステップであって、無線信号は、衛星測位システムの1つまたは複数の衛星からの送信を含み、この情報から、信号が受信された時のデバイスの真の位置に関して推定可能である、ステップと、
デバイスの真の位置に関する複数の異なる仮定を得るステップであって、各仮定は、2つ以上の空間次元内の位置と、位置の組と、位置の範囲とのうちの少なくとも1つを含む、ステップと、
複数の仮定を評価するステップであって、無線信号に関する情報と仮定との間の一致度を評価することを含む、ステップと、
評価の結果に基づき、仮定のうちの1つまたは複数を選択するステップと、
選択された1つまたは複数の仮定の指標を出力するステップと、を含む。
【0006】
これは、位置を決定する問題に対する、実質的に異なる手法を表す。”私はどこにいるか?”という質問をする代わりに、”私は位置Aまたは位置Bにいるか?”と質問することができる。応答は、どちらがより真である可能性が高いかの指標とすることができる。(複数の位置が真の位置である可能性が等しい場合には、これら複数の位置が返される場合もあることに留意すべきである。)
【0007】
これは、例えばデバイスがその場所に応じて異なる方法(例えば、異なるモード)で動作するように構成されている場合に、有用となる場合もある。例えば、電話のユーザが職場にいる際に、個人通話(友人および家族からの)を自動的にボイスメールに転送するように、携帯電話を構成してもよい。このような応用には、正確な位置フィックスを有することは必要ではなく、仮定”職場にある”が、偽よりも真である可能性が高いか否かが分かれば十分な場合もある。
【0008】
測位の問題をこのように定式化することにより、処理負荷のいくらかを除去することができる。この手法によって、位置の決定に用いられる方法に、より高い柔軟性をもたらす場合もある。位置を一意に決定するために通常必要とされる計算の全ては、行う必要がない場合もある。代わりに、計算量および電力消費を最小化しつつ、最も可能性が高い候補(または複数の候補)を迅速に選択することが可能な場合もある。これは、携帯デバイスに、電池寿命を増加させるか、あるいは、逆に同じ電池寿命で、コストおよび/または重量を減少させる場合もある。
【0009】
他の利点は、測位信号の制限された品質または利用可能性にもかかわらず、有用な測位機能が提供可能な場合もある点である。例えば、わずか1つまたは2つの衛星信号に基づいて、位置仮定を判別可能にする場合もある。一般に、従来の衛星測位は、少なくとも4つの衛星から、十分に強い信号を必要とする。
【0010】
質問”私は位置Aまたは位置Bにいるか?”の定式化は、また、プライバシーの保護にも有益となる場合もあるが、位置のみが確認され、これによって明かされる情報は最小限である。位置Aまたは位置Bの住所または正確な地理座標を明かす必要はない。仮定”位置A”の受け入れは、必ずしも、電子デバイスが正確に一意の位置Aにいることを意味するものではなく、電子デバイスが、他方の位置Bよりも位置Aにいる可能性が高いと決定されたことを意味するだけである。例えば、たとえデバイスがロンドンの端のヒースロー空港に位置していても、ロンドンの中心にいるという地点仮定は、チューリッヒの中心にいるという地点仮定よりも一致する。
【0011】
好ましくは、したがって、いくつかの応用において、複数の仮定と関連付けられた場所は、上記方法によって出力されない。同様に、”自宅”および”会社”などの、論理ラベルの形態で、上記方法に複数の仮定が入力してもよい。これらのラベルは、メモリ内で、地理的な場所と事前関連付けされてもよく、これは、仮定を評価可能にする。メモリは、暗号化または保護されてもよいので、場所は外部からアクセス可能ではない。よって、本発明に係る方法を用いた電子デバイスにおいて、ユーザインターフェイスは、仮定についての論理ラベルの入力および出力のみに関して動作可能であってもよい。よって、場所に関する実際の地理座標は、ユーザから隠れる。
【0012】
決定される位置は、電子デバイスの現在位置であるか、または遡及的に決定される履歴位置であってもよいことに留意すべきである。
【0013】
好ましくは、複数の仮定を評価するステップは、少なくともある程度は、各仮定を評価することを含んでもよい。
【0014】
無線信号に関する情報は、無線信号自体の一部、信号から抽出(復号)されたメッセージ、または信号から得られた測定値を含んでもよい。特に、情報は、任意で中間周波数(IF)に対するダウンコンバージョンの後に、デジタルサンプリングされた信号の断片を含んでもよく、または、距離測定値(拡散コードのコード位相、または擬似距離等)を含んでもよい。中間周波数は、ゼロまたはゼロ以外であってもよい。情報は、1つまたは複数の衛星を明確に識別する情報を含んでもよく、この衛星の送信は、無線信号内で検出可能である。この場合には、情報は、無線信号が受信された位置の識別特性を、黙示的または明示的に、捕捉する。
【0015】
情報と仮定の一致度は、得られた情報を予期された情報と比較すること、例えば予想値を実際の測定値と比較すること、によって評価してもよい。ここで、”一致”とは、情報が真である仮定と合致することを意味する。
【0016】
選択された1つまたは複数の仮定は、真である可能性が最も高い、または偽である可能性が最も低い、と決定されたものであってもよい。
【0017】
1つまたは複数の仮定を、その(または各)仮定をサポートする肯定的(確証的)証拠に基づき、真である可能性が最も高いとみなしてもよい。仮定は、その(または各)仮定を否定する否定的(反対)証拠の欠如により、偽である可能性が最も低いとみなしてもよい。
【0018】
他の実施形態において、選択された1つまたは複数の仮定は、真である可能性が最も低い、または偽である可能性が最も高いものとなり得る。この”否定的”情報は、それでも、ユーザ(またはソフトウェアアプリケーション)に、電子デバイスの位置に関する有用な情報を提供することができる。否定的選択は、1つまたは複数の位置仮定の選択であってもよく、この位置仮定の選択は、仮定が偽である可能性が高いという証拠が最も多い、および仮定が真である可能性が高いという証拠が最も少ない、ことを根拠とするものである。例えば、2つの仮定”自宅内にある”と”病院内にある”の場合には、方法は、利用可能な証拠が、仮定”病院内にある”に相反する場合には、デバイスが”病院内にはない”という否定的指標を有用に出力することができる。
【0019】
複数の仮定を評価するステップは、信号に対して検索を行って、少なくとも1つの衛星からの送信を検出するステップを含んでもよく、検索の少なくとも1つのパラメータは、仮定の少なくとも1つに依存する。
【0020】
すなわち、仮定によって提供される位置情報を用いて、検索をガイドしてもよい。例えば、数値を有するパラメータに関して、検索の開始点および/または検索範囲を、候補位置に基づき選択してもよい。
【0021】
任意で、検索の少なくとも1つのパラメータが、2つ以上の仮定に依存して選択される。例えば、検索パラメータを選択してもよいが、これは、複数の仮定を確証もしくは拒絶する、または仮定もしくはまとまりのない仮定の組を判別する可能性を有するためである。2つ以上の仮定のうちのいずれかが変化した場合には、方法の動作を修正してもよい。
【0022】
検索中に、複数の仮定の1つ目に応じた位置で検出可能と予想された衛星からの送信の検出を優先してもよい。
【0023】
検索は、他のソースの検出を試みる前に、予期されるソースの検出を試みることを含んでもよい。あるいは、または加えて、検索は、予期されるソースの検出のために、他のソースと比べてより大きな努力を費やすことを含んでもよく、これは例えば、予期されるソースに関する相関ベースの検索の積分時間を増加することによる。
【0024】
検索中に、複数の仮定の2つ目に応じた位置で検出不可能と予想された衛星からの送信の検出を優先してもよい。
【0025】
これは、2つ目の仮定を反証する試みとして理解されてもよい。衛星送信が、第2の仮定と関連付けられた1つまたは複数の位置で水平線より下の衛星から受信された場合には、これは、この仮定が偽であることの強い証拠である。
【0026】
任意で、第1の仮定の下で検出可能であり、かつ、第2の仮定の下で検出不可能であると予想された、衛星の検出を優先してもよい。これは、この衛星信号の有無が、2つの仮定を強力に判別するものであることを意味する。
【0027】
上記の優先順位付けの手法は、仮定を評価し、かつ、結論に達するために、必要な計算量、エネルギー、および/または時間の減少に役立つであろう。
【0028】
検索の少なくとも1つのパラメータは、好ましくは、少なくとも1つの衛星からの送信の予想周波数と、このような予想周波数の予想ドップラーシフトと、少なくとも1つの衛星によって使用された既知の拡散コードと、少なくとも1つの衛星によって送信された信号が受信される予想タイミングと、このような信号が受信される際に有する予想信号強度と、少なくとも1つの衛星のデータメッセージ内の予想ビットパターンと、の少なくとも1つを含む。
【0029】
衛星信号が受信されるタイミングは、タイミング測定または距離測定のいずれかとして表されてもよいが、それは、到着時刻が、固有にリンクされて、衛星からレシーバまでの距離内に収まるからである。
【0030】
距離測定は、例えば、コード位相、搬送波位相、または擬似距離測定を含んでもよい。一般的に、距離測定は、衛星測位レシーバから測位衛星の配置の中の1つの衛星への距離に関するいくつかの情報を(黙示的または明示的に)提供する、値である。距離測定は、距離によって、あるいは信号の飛行時間または到着時刻によって、表してもよい。距離測定の多くの種類は、絶対または一意の測定ではなく、それらは、典型的には、ある程度の相対性または曖昧さを包含する。例えば、コード位相測定は、それ自体によって、単一のコードエポック(epoch)(すなわち、拡散コードの1つの完全な反復内にあるもの)のみを基準として、(相対的な)到着時刻を指定する。これには、衛星データメッセージのどのコードエポックおよびどのデータビット期間が観測されているかに関する曖昧さが残る。(データビット期間は、20個の完全なコードの反復であり、これは、コードエポックよりも20倍長い。)よって、用語”距離測定”は、ある程度の曖昧さを含む測定と、絶対および/または一意の距離測定との両方を含む、と理解すべきである。同様に、データメッセージ内のビットエッジのタイミングまたは位置は、距離測定とみなすことができるが、その理由は、これらが、例えば、コード位相測定と組み合わせることによって、曖昧さを減少させ、かつ、擬似距離の取得に寄与することができるからである。
【0031】
信号が受信される際に有すると予期される予想信号強度を、例えば、予想電力で信号を検出するのに適した積算時間を選択することによって、検索パラメータとして用いることができる。信号強度または電力は、信号対雑音比(SNR)によって表してもよい。
【0032】
複数の仮定を評価するステップは、仮定の少なくとも1つに基づき、受信した無線信号の少なくとも1つのパラメータの値を予想するステップ(120)と、予想値を、パラメータの対応する測定値と比較するステップ(140)と、を含んでもよい。
【0033】
比較は、予想値と測定値の差を計算するステップと、1つまたは複数の数式を評価して、測定値が予想値と一致しているか否かを決定するステップと、のうちの1つまたは複数を含んでもよい。好ましくは、比較は、2つ以上の値の間で行われる。
【0034】
上記のように、予想され測定された少なくとも1つのパラメータは、少なくとも1つの衛星からの送信の予想周波数と、このような予想周波数の予想ドップラーシフトと、少なくとも1つの衛星によって使用された既知の拡散コードと、少なくとも1つの衛星によって送信された信号が受信される予想タイミングと、このような信号が受信される際に有する予想信号強度と、少なくとも1つの衛星のデータメッセージ内の予想ビットパターンと、の少なくとも1つを含んでもよい。
【0035】
複数の仮定を評価するステップは、少なくとも1つのパラメータの値を予想する前に、仮定を比較して、複数のパラメータのうちのどれが仮定を判別する可能性が最も高いかを決定するステップと、決定の結果に応じて、少なくとも1つの予想すべきパラメータを選択するステップと、をさらに任意で含む。
【0036】
このようにして、初期の評価に、様々な異なる仮定の最適な判別が提供される。例えば、第1の仮定が、衛星AおよびBが可視となると予想し、かつ、第2の仮定が、衛星AおよびCが可視であると予想した場合には、衛星Aからの送信の検索には、あまり意味がなく、送信の有無は、仮定の判別に役立たない。この例では、方法は、仮定を比較し、衛星Aが両者に共通であると決定し、かつ、少なくとも1つの仮定に対して一意である他の衛星(BおよびC)の検索を優先してもよい。
【0037】
このようにして予め仮定を評価することは、仮定を評価するために必要な計算量、エネルギー、および/または時間を減少させることに役立つであろう。
【0038】
各仮定は、各仮定と関連付けられた真である事前確率を有してもよく、かつ、複数の仮定を評価するステップは、最も高い確率を有する仮定を最初に評価することを含んでもよい。
【0039】
平均すると、可能性がより低い仮定の前に、可能性がより高い仮定を評価することは、結論に達するまでに要する時間の減少をもたらすであろう。証拠が、最初に評価された仮定をサポートする場合には、可能性がより低い他の仮定の検査に対して、より少ない作業を充てることができる。さらに、最初に評価された、事前の可能性が最も高い仮定に反して、証拠が迅速に出現した場合には、この過程の評価を終了することができ、そして、代わりに、リソースを(事前の可能性が低い)他の位置仮定の評価に向けることができる。これは、整合する位置仮定を見出すことにおいて、有効性および速度をさらに改善する。
【0040】
好ましくは、複数の仮定において、仮定のうちの1つは、直近に決定されたデバイスの位置(すなわち、最後の既知の位置)である。より好ましくは、各仮定は、(上述のように)各仮定と関連付けられた真である事前確率を有しており、かつ、直近に決定された位置の仮定には、最も高い確率が割り当てられる。
【0041】
換言すると、直近に決定された位置は、好ましくは、仮定の1つであり、かつ、好ましくは、最初に評価された仮定である。これは、最後に位置が決定されてからデバイスが動いてないという確信を反映する。
【0042】
真である可能性が最も高い1つまたは複数の仮定は、完全な位置フィックスが無線信号から計算される前に、選択して出力することができる。
【0043】
これは、位置フィックスを一度も計算せずに、可能性が最も高い仮定を選択して出力することを含んでもよい。あるいは、これは、仮定の選択および出力の後に、後段で位置フィックスを計算することを含んでもよい。
【0044】
位置フィックスを計算することは、衛星の位置の情報と、電子デバイスから衛星までの距離測定の情報と、に基づいて、三辺測量によって電子デバイスの位置を計算することを含んでもよい。典型的には、位置フィックスの計算は、少なくとも3つの衛星、より好ましくは、少なくとも4つの衛星、までの距離測定に依存する。
【0045】
選択された1つまたは複数の仮定の指標を出力するステップは、仮定が真である尤度を示す第1の値と、仮定が偽である尤度を示す第2の値と、第1および第2の値の相対的な大きさを示す第3の値と、の少なくとも1つを出力することをさらに含んでもよい。
【0046】
第1および第2の値は、確率値を含んでもよい。第2の値は、否定仮定のための確率値、すなわち、電子デバイスが仮定に応じた位置に位置していない(またはいなかった)、という仮定であってもよい。第3の値は、例えば、尤度比であってもよい。あるいは、または追加で、方法は、複数の仮定のうちのいずれも真でない、という尤度の指標を出力することを含んでもよい。これは、”ヌル(null)仮定”とみなすことができる。
【0047】
所与の仮定と関連付けられた尤度は、真である仮定の事前確率から独立して表現してもよい。あるいは、事前確率が既知(または推定可能)である場合には、仮定の事前確率を考慮に入れて、真の事後確率を生成してもよい。
【0048】
他の仮定の事前確率および尤度などの要素を、比較関数を用いることにより考慮に入れて、各仮定の分析を選択、結合、および/または管理することができる。
【0049】
複数の仮定は、少なくとも3つの仮定を含んでもよく、これら仮定の1つは、他の仮定のいずれも真でない可能性を表す、ヌル仮定である。
【0050】
この場合には、ヌル仮定が、真である可能性が最も高い(または偽である可能性が最も低い)仮定として選択された場合において、方法は、好ましくは、衛星信号を処理して位置フィックスを計算するステップをさらに含む。
【0051】
方法のこの変形例において、仮定を検査する手法が、仮定された位置のいずれにも電子デバイスが位置していないことを明らかにした場合に限り、完全な位置フィックスが計算される。これは、電子デバイスが、新たな未知の場所に位置していることを示唆する場合がある。次いで、従来の方法で、位置フィックスを計算し、新たな場所を決定することが、有利であろう。
【0052】
この方法によって、電子デバイスが仮定された(よく知られている)場所のいずれかにある場合には、電子デバイスの位置を、迅速かつ最小の努力で確定することができる。しかし、この計算効率の高い手法が、答えを提供できない場合には、デバイスは、従来のGPS処理技術に戻る(これは、典型的にはより計算負荷が大きくなる)。全体的に、この手法は、従来の処理を常に用いるデバイスと比べて、デバイスがエネルギー消費を減少することを可能にする。
【0053】
各仮定は、2つ以上の空間次元における位置と、位置の組と、位置の範囲と、の少なくとも1つを含む。
【0054】
よって、仮定は、一意の場所、あるいは町、州、郡などの地区または地域を定義してもよい。2つの空間次元における位置は、地表上の場所を指定することができる。このような位置は、例えば、緯度座標および経度座標によって指定してもよい。3次元における位置は、緯度、経度、および高度の組み合わせによって指定してもよい。地区は、位置の組によって、例えば、地区の凸包を定義する点として位置を扱うことにより、定義してもよい。あるいは、地区は、2次元における矩形範囲、または半径と組み合わされた中心位置などの、位置の範囲によって定義してもよい。単一の仮定は、まとまりのない場所を含んでもよい。他の場合において、2つ以上の仮定が重複してもよい。例えば、1つの仮定は、もう1つの仮定のより具体的なバージョンであり、これらが階層関係を有するようにしてもよい。すなわち、1つの仮定を、他と関連付けられた場所のサブセットと関連付けてもよい。例えば、”英国”を1つの仮定としてもよく、”ロンドン”をより具体的な下位仮定としてもよい。
【0055】
各仮定は、異なる地理的位置(あるいは位置の組または範囲)と関連付けられている。すなわち、地表上の正確に同じ場所に、2つの仮定が関連することはない。これは、高さまたは高度座標のみが異なる位置(あるいは位置の組または範囲)は、まったく別の仮定とはみなされないことを意味する。
【0056】
仮定は、電子デバイスが候補位置に存在していると考えられる時間を、さらに含んでもよい。例えば、時間は、無線信号が受信された時刻または時間間隔を意味してもよい。
【0057】
仮定を評価するステップは、無線信号に関連する情報が、仮定と相反するか、またはサポートするか、を決定することを含んでもよい。情報が仮定と相反することを決定することは、候補位置で検出可能であると予想されなかった衛星からの送信が、無線信号内において検出されたと決定すること、および無線信号内において候補位置で検出可能であると予想された衛星からの送信が、無線信号内において検出されなかったと決定すること、の1つまたは複数を含んでもよい。
【0058】
また、コンピュータプログラムであって、前記プログラムがコンピュータ上で実行される際に、物理計算デバイスを制御して、上記のステップを実行するように構成されたコンピュータプログラムコード手段を備える、コンピュータプログラムが提供され、そして、このようなコンピュータプログラムは、コンピュータ読み取り可能な媒体において実現される。
【0059】
本発明のもう1つの態様によると、電子デバイスの位置の指標を決定するための装置が提供され、装置は、
衛星測位システムの1つまたは複数の衛星からの送信を含む無線信号を受信するように動作可能な衛星測位レシーバ(10,12,18)と、
前記デバイスの真の位置に関する複数の仮定を得るための入力(26)であって、各仮定は、2つ以上の空間次元内の位置と、位置の組と、位置の範囲とのうちの少なくとも1つを含む、入力と、
プロセッサ(20)であって、
受信した前記無線信号と前記仮定との間の一致度を評価することを含む、複数の前記仮定の評価を行い、
前記評価の結果に基づき、前記仮定のうちの1つまたは複数を選択し、
選択された1つまたは複数の前記仮定の指標を出力するように構成されたプロセッサと、
を備える。
【0060】
プロセッサは、衛星測位レシーバによって受信された少なくとも1つの無線信号を処理して、信号が受信された時のデバイスの真の位置を特徴付ける情報を抽出するように、さらに構成されてもよく、
プロセッサは、無線信号から抽出された情報と仮定との一致度を評価することによって、各仮定を評価するように構成される。
【0061】
以下、添付の図面を参照して、本発明の一例を説明する。
【図面の簡単な説明】
【0062】
【図1】本発明の第1の実施形態に従い動作するGPSレシーバのブロック図。
【図2】第1の実施形態に係る位置の決定方法のフローチャート。
【発明を実施するための形態】
【0063】
衛星測位を用いた位置決定に関する本発明の第1の実施形態を、これより説明する。本実施形態において、電子デバイスは、図1に示されるようなGPSレシーバである。GPSレシーバは、GPS衛星からの送信を含む無線信号を受信するように動作可能である。従来のGPSレシーバが、位置フィックスを決定するために受信信号を完全に処理するのに対して、図1のGPSレシーバは、複数の候補位置のそれぞれの妥当性を評価するために必要な程度だけ、受信信号を処理する(すなわち、デバイスの位置に関する仮定)。GPSレシーバは、次いで、真である可能性が最も高い仮定の指標を出力する。
【0064】
図1に示されるものなどのGPSレシーバの従来部位の動作の詳細は、当業者に良く知られているであろう。例えば、国際特許出願第2009/000842号に、一般的な概要が示されている。
【0065】
図1は、本発明の第1の実施形態に従い動作するGPSレシーバを示している。GPSレシーバ5は、RFフロントエンド12に結合されたアンテナ10を備える。RFフロントエンド12は、アンテナ10を介して受信したGPS信号を増幅するための回路を含む。RFフロントエンドは、また、帯域外干渉を減衰するためのフィルタリング回路と、ミキサとを含む。ミキサは、受信信号と、周波数シンセサイザ14により生成された局部発振器(LO)信号と、を乗算して、合計周波数での信号と、差分周波数での信号と、を生成する。周波数シンセサイザ14は、基準発振器16によって生成された高周波出力OSC1によって駆動される。本実施形態において、基準発振器16の高周波出力OSC1は、26MHzの周波数で動作する。さらなる適切なフィルタリングの後に、RFフロントエンド12での混合動作が、アナログ−デジタル(A/D)コンバータ18に入力される中間周波数(IF)信号を生成する。A/Dコンバータ18によって生成された信号サンプルは、プロセッサ20に出力されて処理される。A/Dコンバータ18とプロセッサ20の両方が、周波数シンセサイザ14により生成された高速クロック出力CLKによってクロッキングされる。RFフロントエンド12とA/Dコンバータ18のアナログ回路を、当業者に良く知られるような従来型としてもよいことに、留意すべきである。
【0066】
A/Dコンバータ18は、直交IF信号の実部および虚部をデジタル領域に変換するために、1対のA/Dコンバータを備えてもよいことに、留意すべきである。この場合には、フロントエンド12とA/Dコンバータ18との間の接続は、複雑なIQ接続であってもよい。同様に、A/Dコンバータ18によって出力される信号サンプルは、直交信号を表してもよい。しかしこれは、本発明の実施に影響せず、そして、当業者は、直交IQアナログおよびデジタル信号の操作を既に熟知しているであろう。
【0067】
本発明において、プロセッサ20は、信号が受信され、かつ、サンプリングされるとすぐに、A/Dコンバータ18から受信したサンプルを処理する。この処理を、以下により詳細に説明する。
【0068】
また、現在時刻を記録するために、リアルタイムクロック(RTC)24が設けられている。これは、信号が受信されたおおよその時刻を決定可能にする。RTC24は、基準発振器16によって生成された第2の出力OSC2によって駆動される。しかし、RTC24は、周波数シンセサイザ14に要求されるよりも低い速度で動作するため、基準発振器16内で分周器を用いて、低周波出力OSC2を提供する。このように、基準発振器16は、単一の石英結晶からマスタークロック信号を生成するマスター発振器として機能し、このマスタークロック信号に、周波数シンセサイザ14とRTC24の両方が同期される。本実施形態において、基準発振器16の低周波出力OSC2は、約26kHzの周波数で動作し、これは、約1000の分周比を示す。
【0069】
プロセッサ20は、1つまたは複数の特定用途集積回路(ASIC:application specific integrated circuit)などの、注文品のハードウェアデバイスとして実施してもよいことに留意すべきである。あるいは、プロセッサ20は、適切にプログラムされた、1つまたは複数の汎用処理ユニットまたはデジタル信号プロセッサ(DSP)を備えてもよい。どちらの代替品の実施も、十分に当業者の能力の範囲内である。
【0070】
入出力(I/O)デバイス26を、プロセッサ20に結合してもよい。これは、GPSレシーバ5のユーザ制御と、評価された後の最も妥当と選択された候補の出力と、を可能にする。この実施形態において、I/Oデバイスは、ユーザ入力用のキーパッドと、出力用のディスプレイとからなる。
【0071】
図2は、第1の実施形態に係る方法を示すフローチャートである。ステップ100において、GPSレシーバは、アンテナ10と、RFフロントエンド12とを用いて、GPS信号を受信する。結果としてのIF信号は、A/Dコンバータ18によってデジタル化され、かつ、信号サンプルがプロセッサ20に出力される。
【0072】
それとは別に、ステップ110において、プロセッサ20は、それぞれがレシーバ5の真の位置に関する仮定を表す候補位置を得る。この例では、2つの候補位置が得られる、と仮定される。もちろん、同じ方法を、より多くの数の仮定へと拡張することもできる。候補は、GPSレシーバ5のメモリ22から得られる。GPSレシーバは、ユーザが定期的に訪れる”お気に入り(favorite)”の場所のリストを、記憶することが知られている。この例では、候補位置は、最も頻繁に用いられるお気に入りを選択することによって得られる。これらの位置は、ユーザの自宅および/または職場に対応すると仮定される。各候補位置は、緯度座標と、経度座標と、を含む。各候補は、リアルタイムクロック24によって供給されるタイムスタンプとも関連付けられている。時刻の仮定は、全ての候補を通して同じであると仮定されるが、それは、決定されるべき位置が、一意の時点での電子デバイスの位置だからである。さらに、デバイスは、時間を推定する他のやり方を持たないと仮定されるため、他の競合する仮定はない。
【0073】
ステップ120、130および140において、プロセッサ20は、候補があれば、どの候補が受信したGPS信号の内容と一致するか否かを評価することにより、各仮定を評価する。これを行うために、プロセッサは、ステップ120において、デバイスが推定された時間に候補位置に位置した場合にプロセッサが観測することが予期される、1つまたは複数の衛星パラメータを予想する。次いで、プロセッサは、ステップ130において、受信したデジタル信号サンプルに対して検索を行い、対応する観測パラメータを測定する。プロセッサ20は、特定の予想パラメータを検索するために、予想に応じて検索の対象を決めることによって、より効率的に検索することができる。ステップ130において測定されたパラメータは、次いで、ステップ140において、ステップ120で得られた予想パラメータと比較される。
【0074】
ステップ120、130および140は、各仮定に対して実行される。最後に、ステップ150において、プロセッサは、予想および測定されたパラメータが最も一致する仮定を選択する。この選択された仮定は、(ステップ160において)入出力インターフェイス26を介して、結果をディスプレイに表示することにより、出力される。
【0075】
各仮定を評価する際に、ステップ120〜140において、衛星の様々なパラメータおよびそれらの送信を用いて、仮定が受信信号と一致しているか否かをチェックしてもよい。いくつかの実例を、これより説明する。
(例1―衛星の可視性)
【0076】
各位置仮定に基づき、プロセッサは、ステップ120において、可視であるべき衛星を予想する。ここで、”可視”とは、この衛星からの送信信号が、レシーバ5で受信された無線信号において検出可能であることを意味する。水平線よりも上(候補位置から見た際)の衛星は、可視のはずである。よって、どの衛星が可視であるかを予想することは、仮定された時刻および位置で、水平線よりも上にある衛星を決定することを含む。これは、衛星の軌道運動の情報を用いて行うことができ、この情報は、全ての衛星によって放送される”アルマナック(almanac)”データから、または各衛星によって放送される、自身の軌道を述べるより正確な”エフェメリス(ephemeris)”データから、得られる。アルマナックおよび/またはエフェメリスデータは、十分に長い期間にわたり、衛星のデータメッセージを復号することにより、得られる。あるいは、補助GPS(AGPS:Assisted GPS)として知られる技術において、この情報を、別々の通信チャネルにわたって提供してもよい。可視性を予想するために、比較的古いアルマナックまたはエフェメリスデータでも、用いることができることに、留意すべきである。その有効性の通常の範囲の外にあるデータは、やや不正確である可能性があるが、しかし、衛星が水平線上にあるか否かなどの大まかな予想に対しては、小さな不正確さが著しく影響する可能性は低い。例えば、誤差のマージンを用いて、水平線に近い衛星を対象から外すことができる。
【0077】
可視であると予想された衛星の組は、最大で32個のGPS衛星の完全な配置のサブセットとなる。GPSシステムの設計によると、地球上の全ての場所において、常に少なくとも4つの衛星が可視のはずである。しかし、多くの場合には、4つ以上が利用可能である。
【0078】
可視であると予想されたGPS衛星のサブセットを用いて、プロセッサ20は、次いでステップ130において、GPS信号サンプルを処理し、対応する衛星信号の検出を試みる。衛星信号は、この衛星に関する拡散コードのコピーを、受信サンプルと関連付けることによって検出することができる。一般に、時間および周波数の両方において、ある範囲にわたって一致を検索する必要がある。したがって、検索は、計算負荷が大きい。この例では、プロセッサは、既に可視と予想されている衛星のみを検索することにより、その計算量を減少させる。
【0079】
このステップ130は、各仮定に対して行われる。しかし、各衛星は、1度だけ検索すればよい。いくつかの衛星は、2つ以上の仮定位置で可視であることが予想され得ることに、留意すべきである。これらの衛星は、仮定を判別するためには有用性が低い。よって、可能であれば、最初に、適切な仮定のサブセットに一意である衛星を検索することが好ましいであろう。これは、可能な限り迅速かつ有効に、レシーバが仮定を判別することを可能にするであろう。例えば、”自宅”位置から、衛星1、4、6、および20が可視であると予想され、かつ、”会社”位置から、衛星4、6、18、および20が可視であると予想される場合には、プロセッサは、衛星1および18の検索を優先してもよい。
【0080】
プロセッサは、次いでステップ140において、予想された衛星のリストを、見つかった衛星のリストと比較する。プロセッサは、ステップ150において、結果に基づき最も可能性が高い仮定を選択する。この選択は、見つかった予想衛星の絶対数、または見つかった予想衛星の比率、またはいくつかの他の類似の基準に基づいてもよい。見つかった衛星の(絶対または相対)数は、信頼測定値として用いてもよく、この信頼測定値は、仮定が真である可能性はどの程度かを示す。このインジケータは、選択された仮定と共に出力してもよい。
【0081】
プロセッサは、また、デジタル信号サンプルに対して、可視であることが予想されなかった衛星の検索を行なってもよい。しかし、プロセッサは、このタスクに対して、比較的により少ない作業を充ててもよく、例えば、より短い積分時間を、予期されない衛星の相関検索に用いてもよい。この検索は、よって、予期される可視衛星の検索よりも感度が低く、かつ、比較的強い衛星信号のみを見つけるであろう。可視であると予想されない強い衛星信号を見つけることは、仮定が偽であることを示唆する。したがって、見つけられた予期されない衛星信号の数を、仮定が偽である尤度の基準として用いてもよい。この”偽”の基準を、選択された仮定と共に出力してもよい。あるいは、信頼基準と偽の基準の相対値を表す、第3の基準を構築してもよい。例えば、信頼基準の、偽の基準に対する割合を、出力してもよい。
【0082】
予期される信号の検索が高い感度である場合には、相互相関の問題を避けるために、予期されない信号の検索が必要となり得ることに、留意すべきである。これは、GPSで用いられるような拡散コードの不可避な副作用であり、見掛けの信号強度が著しく弱くなるが、誤った拡散コードを用いて信号が検出されることがある。これは、実際には、異なる衛星で用いられるコード間の相互相関がゼロでないために起こる。GPS L1 C/Aコードの場合には、正しい拡散コードを用いた場合よりも約25dB弱いレベルで、誤った信号を検出可能であることが、一般的である。したがって、所与の衛星SV1の拡散コードを検索する場合には、無線信号に衛星の送信が存在しなかったとしても、レシーバは、(たまたま可視であり、かつ、比較的強い)異なる衛星SV2の拡散コードとの相互相関を介して、なおもこの拡散コードを弱く検出するように見える場合もある。相互相関の軽減は、当該技術分野において知られており、典型的には全ての可能なSV信号の検索を伴う。検索は、比較的短い積分時間を用いることができるが、それは、強い信号のみを対象とするためであり、結果として、この検索は比較的迅速となり得る。同じ特性(例えばドップラーシフト、コード位相等)を共有する、続いて検出される任意の弱い信号は、より強い信号と重複するため、無視することができる。
【0083】
一般に、仮定が偽である尤度を評価することは有用であるが、これは、時には、仮定のいずれも真ではないためである。すなわち、GPSレシーバ5は、いずれの候補位置にも位置しないことがある。これが当てはまる場合の指標を、出力することが望ましい。
【0084】
多くの場合には、候補位置は、衛星の可視性のみに基づいて区別するには、互いに近すぎる。一般に、著しく異なる衛星の組が、可視であると予想されるには、候補は、大きく離れている必要がある。よって、衛星の可視性が、英国内の場所がスイス内の場所から区別できる一方で、例えば、英国内の2つの場所を、互いに区別できないかもしれない。この場合には、以下の例のいずれかに説明されるようなさらなる処理が必要となる。
(例2―信号強度)
【0085】
任意で、予想および観測された可視の衛星のリストを比較することに加えて、プロセッサ20は、各可視衛星から受信された信号の相対強度を比較することもできる。信号強度は、信号対雑音比(SNR:Signal-to-Noise Ratio)によって測定することができる。信号強度は、水平線より上の衛星の迎角(他の要素のなかでも特に)に依存して変化する。よって、測定された信号と、予想された信号と、を比較することによって、1つの位置を他と区別することが可能となる。米国特許第2010/032057号は、迎角に依存するSNRを予想するためのモデルを述べている。GPSレシーバにおけるアンテナのアンテナ利得パターンも考慮すべきであることに、留意すべきである。好ましくは、アンテナは、固定の向きに配置すべきであり、例えば、カーナビゲーションシステムのアンテナの主極は、垂直に上方を向いてもよく、かつ、アジマス方向への変化がほとんどなくてもよい。これは、自動車が向く方向が、観測される信号強度に影響しないことを意味する。
【0086】
例1と比べて、最小の追加の処理が必要であることに、留意すべきである。相関ベースの衛星信号の検索が既に行われているとすると、信号強度は、相関関数のピークの大きさから得られる。
(例3―ドップラーシフト)
【0087】
上述のように、特定の衛星の信号の検索は、一般に、時間遅延(コード位相)および周波数の範囲での検索を伴う。周波数の不確実性は、いくつかの要因によって起き、この要因は、基準発振器16の周波数の規則的なオフセットまたはドリフトと、衛星とレシーバとの間の相対運動に起因するドップラーシフトと、を含む。規則的オフセットまたはドリフトは、全ての衛星に対して同じである。一方、個別の受信衛星信号の間で観測される相対周波数差は、衛星とレシーバとの間の相対速度の特性となる。衛星の軌道の情報に基づき、プロセッサは、ステップ120において、各候補位置で、可視と予想される各衛星に対するドップラーシフトを予想することができる。次いで、プロセッサは、ステップ130において、各衛星信号の観測周波数と、予想されたドップラーシフトと、を比較して、どれが最も一致しているかを決定することができる。
【0088】
上述の例1および2と比べて最小の追加の処理を必要とすることに、留意すべきである。相関ベースの衛星信号の検索が既に行われているとすると、衛星の信号の観測周波数は、周波数次元において、相関関数におけるピークの位置から既に知られている。
(例4―距離測定)
【0089】
場合によっては、上述の技術のいずれも、候補を分離するための十分な判別を提供しない。あるいは、候補の選択(または全ての候補の拒絶)において、高レベルの信頼度を有することが望まれる場合がある。このような場合には、以下において、各仮定のより詳細な評価が、望ましいであろう。
【0090】
この例では、2つの候補位置が、予期される衛星の同一のリストを生成し、かつ、予期される衛星の全てが、受信した無線信号のサンプルに見出された、と仮定する。
【0091】
プロセッサ20は、ステップ120において、各候補位置に対して、少なくとも2つの衛星に関する擬似距離を予想する。これは、各衛星の軌道位置を決定し、かつ、この軌道位置から候補位置への距離を、次式を用いて計算することにより、行うことができる。
(Xs−Xh)2+(Ys−Yh)2+(Zs−Zh)2=Rp
【0092】
ここで、X、Y、およびZは、3次元での空間座標であり、下付き文字Sは、衛星の位置を示し、下付き文字hは、仮定位置の1つを示す。Rpは、衛星と仮定位置との間の予想距離である。
【0093】
プロセッサ20は、次いで、これら衛星の実際の擬似距離を、従来のやり方で測定する。実際の擬似距離を測定する際には、予想される擬似距離を、開始点として使用出来ることに、留意すべきである。例えば、拡散コードのコード位相、衛星データメッセージのビットエッジのタイミング、および/またはデータメッセージ内のビット位置を、全て予想することができる。それでも、これらの予想が検索に役立つ範囲は、レシーバのタイミング精度(およびレシーバが候補位置にあるかどうか)に依存する。レシーバでの時刻推定が非常に正確である場合には、どの信号がその時点で候補位置に到着すると予想されるかを、非常に正確に予想できる。時間推定が不正確な場合には、予想は、同様に不正確となる。不正確さがある限り、予想の両側で、不正確さの有限の範囲内での検索を行う必要がある。しかし、ひとたび1つの衛星信号が検出されると、次の信号の検索の開始点は、第1の信号の検出タイミングに対して調整することができる。プロセッサが、これらの他の信号を、最初に検出された信号に対する特定のオフセットで見つけることが予期されるため、その後の信号の検索範囲も、仮定が真である場合には、狭められる可能性があり、または仮定が偽である場合には、それらは全く見つからないであろう。
【0094】
プロセッサは、ステップ140において、予想された疑似距離と、測定された擬似距離と、を比較する。一般的に、測定値でのタイミング(よって範囲)の不確実性のため、値の対は等しくならないことに、留意すべきである。しかし、これは、タイミング(または範囲)バイアスが、両方の衛星に対して同じか否かをテストすることによって、適応させることができる。これは、次式で2回評価することによって、行うことができる。
Rp=R−ΔR
【0095】
ここで、Rは、測定される擬似距離であり、ΔRは、レシーバでのタイミング誤差に起因する(擬似距離と予想距離の間の)オフセットである。この式が、異なる衛星に対して2回評価された場合には、両方のケースで、結果として同じオフセットとなるべきである。異なるオフセットは、測定される擬似距離が仮定と合致しないことを示す。結果におけるより高い信頼度は、3つ以上の衛星に対して式を評価することによって得られるであろう。
【0096】
場合によっては、完全な擬似距離を計算する必要がない場合もあることに、留意すべきである。他の距離測定は、異なる仮定を判別するために十分となり得る。例えば、コード位相情報は、衛星の送信信号の相対タイミングを、拡散コードの各反復内で特徴付ける。コード位相は、それ自体では、完全な距離測定を提供せず、それは、どの拡散コードの反復が観測されたのかが未知のままだからである。しかし、コード位相測定値の組は、2つの異なる仮定を判別するのに、十分となり得る。
【0097】
コード位相が不十分な場合には、少量の追加の情報があればよい。例えば、衛星のデータメッセージのビットエッジの位置を検出し、かつ、予想と比較され得る制約のさらなる組を提供するために用いてもよい。
【0098】
この手法のさらなる拡張において、衛星データメッセージにおける、ビットの特定シーケンスの位置を、各仮定位置および推定時刻に基づき、予想してもよい。これらの予想を、次いで、データメッセージの実際の復調部分と比較することができる。
【0099】
距離測定または距離測定の一部が仮定に基づき予想されるような全ての場合において、予測を用いて、距離測定値の実際の測定を加速できるが、これは、検索が、予想値に近い測定値を優先できるためであることに、留意すべきである。
【0100】
上述の場合のそれぞれにおいて、仮定の選択を行うために、位置フィックスを計算する必要はなかったことに、留意すべきである。実際に、多くの場合には、従来のやり方で位置フィックスを計算する十分な情報がない場合であっても、高い信頼度を有する各仮定を確証または拒絶することが可能である。例えば、上述したように、2つの衛星に対して擬似距離を予想および測定することにより、仮定を確証または拒絶することができる。対照的に、単に2つの衛星からの信号を用いて、一意の位置フィックスを計算することは、通常は不可能である。
【0101】
他の実施形態において、本発明に係る位置確認の方法を、完全な位置フィックスの計算への前処理(precursor)として用いてもよい。例えば、電子デバイスは、ここで述べられている方法を用いて、より遅い正確な位置フィックスの計算に進む前に、あるいは、ユーザまたはソフトウェアアプリケーションが明確に要求した場合のみ、真である可能性が高い仮定を迅速に確定してもよい。
【0102】
いくつかの実施形態において、本発明に係る仮定を確認する方法を、測位方法の第1のステップとして用いてもよい。仮定のいずれも、十分な信頼度で受け付けられなかった場には、方法は、どの仮定も真でないと結論付けてもよく、よって、従来のやり方で衛星信号を用いて位置フィックスを計算する、第2のステップに進んでもよい。
【0103】
ここまで当業者には明らかであるように、上述の例は、相互排他的ではなく、かつ、有益な効果と共に、互いに組み合わせることができる。
【0104】
本発明のより高度な実施形態において、仮定の評価を最適化して、(予期される)計算負荷を最小化することができる。いくつかの仮定は、本質的に、他よりも可能性が高いことがある。各仮定の事前確率に関する情報が利用可能であれば、この情報を用いて、評価プロセスの順番を選択することができる。デバイスの最後の既知の位置は、通常、非常に可能性が高い仮定を提供するが、これは、例えば、デバイスが静止しているか、またはゆっくり動いている(仮定の間の距離に対して)可能性があるからである。この可能性が高い仮定は、最初に評価される(上の番号付けされた例で説明されたような方法を用いて)。多くの場合には、この仮定は正しく、そして、迅速かつ容易に確認することができる。次いで、他の仮定も、必要に応じて、簡単にチェックし、第1の仮定と反対の証拠がないことを保証することができる。このように優先順位付けすることとは別に、最後の既知の位置も、他の仮定と同じやり方で評価することができる。
【0105】
仮定を評価する際に、仮定と反対の証拠が見つかった場合には、方法は、直ちに他の仮定の評価に進んでもよい。例1のシナリオを用いて、衛星1、4、6、および20が、仮定された場所Aから可視であると予想される。相関検索が、衛星1の検索に失敗した場合には、方法は、衛星4、6、および20の検索を継続するよりも、直ちにもう1つの仮定された場所Bのテストに進んでもよい。すなわち、衛星1からの信号がないことに基づいて、直ちに場所Aを無視してもよい。
【0106】
上述の実施形態において、無線信号は、受信されると直ちに処理され、無線信号から得られた情報の各仮定との一致性を評価し、これにより、電子デバイスの最も可能性が高い位置を決定した。しかし、無線信号に関する情報は、代わりに、後段で処理するために記憶させてもよいことを、当業者は理解するであろう。この後段の処理は、無線信号を受信したものと同じデバイスか、または別のデバイスで行なってもよい。
【0107】
上の第1の実施形態において、図1のGPSレシーバ5は、デジタルGPS信号サンプルを、受信して直ぐに処理するように構成されていた。この実施形態の変形において、GPSレシーバは、データを処理する代わりに、データをメモリ22に記憶させるように構成してもよい。この種のGPSレシーバは、当該技術分野において、”記憶および後処理(Store-and-process)”レシーバまたは”捕捉および処理(Capture-and-Process)”レシーバとして知られている。
【0108】
このような実施形態の1つにおいて、メモリ22に記憶されるデータは、A/Dコンバータ18によって供給されるIF信号の未処理サンプルを含む。すなわち、衛星信号を検出し、距離測定を計算する処理は、サンプルが記憶される前には行われない。しかし、他の実施形態において、サンプルに対して追加の処理を行い、処理の結果として生じるデータを、メモリ22に記憶させてもよい。すなわち、受信した無線信号自体を(デジタルサンプルの形態で)記憶する代わりに、信号を分析してもよく、そして、信号の内容に関して得られた情報を、メモリ22に記憶させてもよい。例として、メモリに記憶された情報は、1つまたは複数の衛星信号に関し、検出された信号強度、コード位相、観測された周波数、搬送波位相、ビットエッジタイミング、データメッセージのいくつかのビット、または擬似距離、の1つまたは複数を含んでもよい。
【0109】
受信した無線信号を処理し、抽出情報を記憶し、続いて抽出情報を処理して仮定を評価することは、非効率となる場合があることに、留意すべきである。これは、仮定の情報を用いて、受信信号の初期の処理を(上の例で説明したように)加速できるからである。よって、”キャプチャおよびプロセス”GPSレシーバを用いる場合には、受信した無線信号の”未加工の”デジタルサンプルを記憶することが好ましいであろう。次いで、これらのサンプルを後で処理して、同時に必要な情報を抽出し、そして、各仮定を評価することができる。
【0110】
本発明に係る技術は、使用される場所に応じて異なって動作するように構成された電子デバイスに対して有用となり得る。デバイスが特別なやり方で動作するように構成されている場所は、この方法のための仮定として使用することができる。
【0111】
いくつかの応用において、異なる仮定の間に、重要性の等しいバランスがあり得る。例えば、自宅にある場合には個人通話用の着信音を使用し、会社にある間は個人通話用に無音/振動警告を使用するように、携帯電話が構成されている場合には、ユーザは、全ての種類の誤判別に対して等しい不便さを関連付ける可能性がある。すなわち、ユーザは、電話が、会社にいる間に誤って鳴った場合、または自宅で誤って無音で警告した場合には、同程度に不満を覚える可能性がある。
【0112】
他の応用において、いくつかの種類の誤りは、他よりも犠牲の大きいものとなる可能性がある。例えば、デバイスが特定の場所にあることを確実に保証する必要がある場合もある。あるいは、デバイスが特定の場所にないことを、確実に保証する必要がある場合もある。以下の実例は、このことを例示する。
1.携帯電話は、病院その他の既知の安全を重要視すべき場所では、動作すべきではない。よって、デバイスの場所を確立するための演繹法は、デバイスが安全を重要視すべき場所にないことを報告する前に、非常に高いレベルの信頼度を有するべきである。換言すると、演繹法は、慎重過ぎるぐらい慎重になるべきである。デバイスは、デバイスが指定された場所にないことの強い証拠を持ち、かつ、デバイスが指定された場所に実際にあることの反証を持たないべきである。仮定”病院内にある”が、真の尤度値および偽の尤度値と関連付けられている場合には、方法は、真の尤度に対して低い閾値を適用し、かつ、偽の尤度に対して高い閾値を適用してもよい。このようにすると、デバイスが病院内にはないことを誤って判断する可能性は低くなる。(デバイスが病院内にあると誤って判断される方が多い場合もあるが、これは、より犠牲の少ない誤りと考えられる。)
2.機密データファイルは、会社でのみ開かれるべきである。したがって、デバイスは、これらのファイルへのアクセスを許可する前に、デバイスが会社内にあることについて高いレベルの信頼度を有するべきである。デバイスが会社にあると、誤って判断することの犠牲は大きい。方法は、よって、デバイスが指定の場所にあることの強い証拠と、デバイスが実際に会社の外にあることの反証がないことと、を必要とするであろう。反証は、デバイスが会社にあるという仮定に反する証拠、または、別の合致しない仮定をサポートする証拠であってもよい。
【0113】
図面および上記の説明において、本発明を詳細に例示および説明したが、このような例示および説明は、非限定的な例示または典型であるとみなされるべきである。本発明は、開示された実施形態に限定されるものではない。
【0114】
例えば、候補位置(仮定)は、任意の適切なソースから得ることができる。これは、前の手動ユーザ入力またはセットアップ段階の間の構成、あるいは、いくつかの他のハードウェアデバイスから測位デバイスへの入力を含み得る。同様に、候補位置を、電子デバイスで実行されるソフトウェアアプリケーションによって、このデバイスに内蔵される測位サブシステムに対して提供してもよい。
【0115】
状況によっては、本発明を用いて、各仮定の下で、正確な物理的場所を保護または隠すことができる。これは、上述したように、データ保護またはプライバシー目的に有用となり得る。1つのそのような実施形態において、メモリ22は、複数の位置仮定のそれぞれをラベルと関連付けるルックアップテーブルを含んでいる。入出力デバイス26は、これらのラベルを用いて、仮定を参照する。よって、方法により仮定が選択され、かつ、I/Oインターフェイス26を介して出力されると、ラベルのみが識別される。下にある実際の地理座標は、隠されたままである。仮定は、それらのラベルを用いて入力してもよい。例えば、ユーザは、仮定”自宅にある”、”会社にある”、および”友人の家にある”を、ユーザインターフェイスを介して入力してもよい。プロセッサ20は、この入力を受け取り、メモリ22に記憶されているルックアップテーブルを用いて、地理座標に変換する。ラベルと座標との間の関連付けは、デバイスの構成段階の間に事前定義されていてもよい。例えば、メモリ22内のルックアップテーブルを作成または編集するために、パスワード認証を要求してもよい。測位方法によって1つまたは複数の仮定が選択されている場合には、プロセッサ20は、メモリ22内の関連ラベルを検索し、かつ、I/Oインターフェイス26を介してこれらのラベルを出力する。
【0116】
先に上述した実施形態は、GPS L1信号を用いた実施に焦点を合わせている。しかし、述べられた技術は、他のGPS信号(例えばL2またはL5信号)と共に適用することもでき、あるいは欧州連合のガリレオシステムまたはロシアのシステムGLONASSなどの、他の衛星測位システムと共に用いることもできる。いくつかの実施形態において、2つ以上の異なるGNSSサービスの組み合わせからの信号を活用して、仮定を評価してもよい。これは、例えば、各個別サービスから不完全な信号の組が受信され、任意の1つのサービスを用いて位置フィックスを計算すること(または満足のいくように仮定を評価すること)が可能でないような場合に、有効な場合がある。異なる衛星配置(または異なるGNSSサービス)からの信号を活用することは、一般に、仮定を評価する際の結果の信頼度を高める。
【0117】
特許請求される発明を実施するに際して、当業者は、図面、開示、および添付の特許請求の範囲を検討することにより、開示された実施形態の他の変形を理解および達成できる。特許請求の範囲において、”備える”という語は、他の要素またはステップの存在を除外せず、不定冠詞”1つの(”a”または”an”)”は、複数性を除外しない。1つのプロセッサまたは他のユニットが、特許請求の範囲において列挙されるいくつかの項目の機能を満たしてもよい。機能は、1つの集積化電子デバイスで実行してもよく、あるいは機能を、異なる個別のデバイスに分散してもよい。例えば、いくつかの機能を、有線ネットワーク接続または無線ネットワーク接続を介してアクセスされる遠隔サービスによって実行してもよい。特定の手段が、互いに異なる従属請求項において列挙されているという単なる事実は、これらの手段を有利に組み合わせて用いることができないということを示さない。コンピュータプログラムを、他のハードウェアと共に、またはその一部として供給される、光記憶媒体またはソリッドステート媒体などの適切な媒体で、記憶/配布してもよいが、インターネットまたは他の有線または無線の電気通信システムを介するなど、他の形態で配布してもよい。特許請求の範囲におけるどの参照符号も、範囲を限定するものとして解釈されるべきではない。
【特許請求の範囲】
【請求項1】
電子デバイスの位置の指標を決定する方法であって、
前記デバイスによって受信された無線信号に関する情報を得るステップ(100)であって、前記無線信号は、衛星測位システムの1つまたは複数の衛星からの送信を含み、この情報から、前記信号が受信された時の前記デバイスの真の位置に関して推定可能である、ステップと、
前記デバイスの真の位置に関する複数の仮定を得るステップ(110)であって、各仮定は、2つ以上の空間次元内の位置と、位置の組と、位置の範囲とのうちの少なくとも1つを含む、ステップと、
複数の前記仮定を評価するステップ(120,130,140)であって、前記無線信号に関する情報と前記仮定との間の一致度を評価することを含む、ステップと、
前記評価の結果に基づき、前記仮定のうちの1つまたは複数を選択するステップ(150)と、
選択された1つまたは複数の前記仮定の指標を出力するステップ(160)と、を含むことを特徴とする方法。
【請求項2】
選択された1つまたは複数の前記仮定は、
真である可能性が最も高い、
偽である可能性が最も低い、
偽である可能性が最も高い、または
真である可能性が最も低い、
と決定されたものである、ことを特徴とする請求項1に記載の方法。
【請求項3】
複数の前記仮定を評価するステップは、前記信号に対して検索を行い、少なくとも1つの衛星からの送信を検出するステップ(130)を含み、前記検索の少なくとも1つのパラメータは、前記仮定の少なくとも1つに依存する、ことを特徴とする請求項1または請求項2に記載の方法。
【請求項4】
前記検索ステップ(130)の間、複数の前記仮定の1つ目に応じた位置で検出可能と予想された衛星からの送信の検出を優先することを特徴とする請求項3に記載の方法。
【請求項5】
前記検索ステップ(130)の間、複数の前記仮定の2つ目に応じた位置で検出可能でないと予想された衛星からの送信の検出を優先することを特徴とする請求項3または請求項4に記載の方法。
【請求項6】
前記検索ステップ(130)の少なくとも1つの前記パラメータは、
少なくとも1つの前記衛星からの送信の予想周波数と、
このような予想周波数の予想ドップラーシフトと、
少なくとも1つの前記衛星によって使用された既知の拡散コードと、
少なくとも1つの前記衛星によって送信された信号が受信される予想タイミングと、
このような信号が受信される際の予想信号強度と、
少なくとも1つの前記衛星のデータメッセージ内の予想ビットパターンと、
の少なくとも1つを含む、ことを特徴とする請求項3乃至5のいずれかに記載の方法。
【請求項7】
複数の前記仮定を評価するステップは、
前記仮定の少なくとも1つに基づき、前記受信した無線信号の少なくとも1つのパラメータの値を予想するステップ(120)と、
前記予想した値を、前記パラメータの対応する測定値と比較するステップ(140)と、
を含むことを特徴とする請求項1乃至6のいずれかに記載の方法。
【請求項8】
複数の前記仮定を評価するステップは、少なくとも1つの前記パラメータの値を予想する前に、
複数のパラメータのうちのどれが前記仮定を判別する可能性が最も高いかを決定するために、前記仮定を比較するステップと、
前記決定の結果に応じて、少なくとも1つの予想すべき前記パラメータを選択するステップと、
をさらに含むことを特徴とする請求項7に記載の方法。
【請求項9】
各仮定は、各仮定と関連付けられた真である事前確率を有しており、
複数の前記仮定を評価する前記ステップは、最も高い確率を有する前記仮定を最初に評価することを含む、
ことを特徴とする請求項1乃至8のいずれかに記載の方法。
【請求項10】
真である可能性が最も高い1つまたは複数の前記仮定が、前記無線信号から完全な位置フィックス(position fix)が計算される前に、選択され、かつ、出力される、ことを特徴とする請求項1乃至9のいずれかに記載の方法。
【請求項11】
選択された1つまたは複数の前記仮定の指標を出力するステップは、
前記仮定が真である尤度を示す第1の値と、
前記仮定が偽である尤度を示す第2の値と、
前記第1の値および前記第2の値の相対的な大きさを示す第3の値と、
の少なくとも1つを出力することをさらに含む、ことを特徴とする請求項1乃至10のいずれかに記載の方法。
【請求項12】
コンピュータプログラムであって、
前記プログラムがコンピュータで実行される際に、請求項1乃至11のいずれかのステップの全てを実行するように構成されたコンピュータプログラムコード手段を備える、ことを特徴とするコンピュータプログラム。
【請求項13】
コンピュータ読み取り可能な媒体上で実現されている、ことを特徴とする請求項12に記載のコンピュータプログラム。
【請求項14】
電子デバイスの位置の指標を決定するための装置であって、
衛星測位システムの1つまたは複数の衛星からの送信を含む無線信号を受信するように動作可能な衛星測位レシーバ(10,12,18)と、
前記デバイスの真の位置に関する複数の仮定を得るための入力(26)であって、各仮定は、2つ以上の空間次元内の位置と、位置の組と、位置の範囲とのうちの少なくとも1つを含む、入力と、
プロセッサ(20)であって、
受信した前記無線信号と前記仮定との間の一致度を評価することを含む、複数の前記仮定の評価を行い、
前記評価の結果に基づき、前記仮定のうちの1つまたは複数を選択し、
選択された1つまたは複数の前記仮定の指標を出力するように構成されたプロセッサと、
を備えることを特徴とする装置。
【請求項1】
電子デバイスの位置の指標を決定する方法であって、
前記デバイスによって受信された無線信号に関する情報を得るステップ(100)であって、前記無線信号は、衛星測位システムの1つまたは複数の衛星からの送信を含み、この情報から、前記信号が受信された時の前記デバイスの真の位置に関して推定可能である、ステップと、
前記デバイスの真の位置に関する複数の仮定を得るステップ(110)であって、各仮定は、2つ以上の空間次元内の位置と、位置の組と、位置の範囲とのうちの少なくとも1つを含む、ステップと、
複数の前記仮定を評価するステップ(120,130,140)であって、前記無線信号に関する情報と前記仮定との間の一致度を評価することを含む、ステップと、
前記評価の結果に基づき、前記仮定のうちの1つまたは複数を選択するステップ(150)と、
選択された1つまたは複数の前記仮定の指標を出力するステップ(160)と、を含むことを特徴とする方法。
【請求項2】
選択された1つまたは複数の前記仮定は、
真である可能性が最も高い、
偽である可能性が最も低い、
偽である可能性が最も高い、または
真である可能性が最も低い、
と決定されたものである、ことを特徴とする請求項1に記載の方法。
【請求項3】
複数の前記仮定を評価するステップは、前記信号に対して検索を行い、少なくとも1つの衛星からの送信を検出するステップ(130)を含み、前記検索の少なくとも1つのパラメータは、前記仮定の少なくとも1つに依存する、ことを特徴とする請求項1または請求項2に記載の方法。
【請求項4】
前記検索ステップ(130)の間、複数の前記仮定の1つ目に応じた位置で検出可能と予想された衛星からの送信の検出を優先することを特徴とする請求項3に記載の方法。
【請求項5】
前記検索ステップ(130)の間、複数の前記仮定の2つ目に応じた位置で検出可能でないと予想された衛星からの送信の検出を優先することを特徴とする請求項3または請求項4に記載の方法。
【請求項6】
前記検索ステップ(130)の少なくとも1つの前記パラメータは、
少なくとも1つの前記衛星からの送信の予想周波数と、
このような予想周波数の予想ドップラーシフトと、
少なくとも1つの前記衛星によって使用された既知の拡散コードと、
少なくとも1つの前記衛星によって送信された信号が受信される予想タイミングと、
このような信号が受信される際の予想信号強度と、
少なくとも1つの前記衛星のデータメッセージ内の予想ビットパターンと、
の少なくとも1つを含む、ことを特徴とする請求項3乃至5のいずれかに記載の方法。
【請求項7】
複数の前記仮定を評価するステップは、
前記仮定の少なくとも1つに基づき、前記受信した無線信号の少なくとも1つのパラメータの値を予想するステップ(120)と、
前記予想した値を、前記パラメータの対応する測定値と比較するステップ(140)と、
を含むことを特徴とする請求項1乃至6のいずれかに記載の方法。
【請求項8】
複数の前記仮定を評価するステップは、少なくとも1つの前記パラメータの値を予想する前に、
複数のパラメータのうちのどれが前記仮定を判別する可能性が最も高いかを決定するために、前記仮定を比較するステップと、
前記決定の結果に応じて、少なくとも1つの予想すべき前記パラメータを選択するステップと、
をさらに含むことを特徴とする請求項7に記載の方法。
【請求項9】
各仮定は、各仮定と関連付けられた真である事前確率を有しており、
複数の前記仮定を評価する前記ステップは、最も高い確率を有する前記仮定を最初に評価することを含む、
ことを特徴とする請求項1乃至8のいずれかに記載の方法。
【請求項10】
真である可能性が最も高い1つまたは複数の前記仮定が、前記無線信号から完全な位置フィックス(position fix)が計算される前に、選択され、かつ、出力される、ことを特徴とする請求項1乃至9のいずれかに記載の方法。
【請求項11】
選択された1つまたは複数の前記仮定の指標を出力するステップは、
前記仮定が真である尤度を示す第1の値と、
前記仮定が偽である尤度を示す第2の値と、
前記第1の値および前記第2の値の相対的な大きさを示す第3の値と、
の少なくとも1つを出力することをさらに含む、ことを特徴とする請求項1乃至10のいずれかに記載の方法。
【請求項12】
コンピュータプログラムであって、
前記プログラムがコンピュータで実行される際に、請求項1乃至11のいずれかのステップの全てを実行するように構成されたコンピュータプログラムコード手段を備える、ことを特徴とするコンピュータプログラム。
【請求項13】
コンピュータ読み取り可能な媒体上で実現されている、ことを特徴とする請求項12に記載のコンピュータプログラム。
【請求項14】
電子デバイスの位置の指標を決定するための装置であって、
衛星測位システムの1つまたは複数の衛星からの送信を含む無線信号を受信するように動作可能な衛星測位レシーバ(10,12,18)と、
前記デバイスの真の位置に関する複数の仮定を得るための入力(26)であって、各仮定は、2つ以上の空間次元内の位置と、位置の組と、位置の範囲とのうちの少なくとも1つを含む、入力と、
プロセッサ(20)であって、
受信した前記無線信号と前記仮定との間の一致度を評価することを含む、複数の前記仮定の評価を行い、
前記評価の結果に基づき、前記仮定のうちの1つまたは複数を選択し、
選択された1つまたは複数の前記仮定の指標を出力するように構成されたプロセッサと、
を備えることを特徴とする装置。
【図1】


【図2】
【図2】
【公開番号】特開2013−79958(P2013−79958A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−216271(P2012−216271)
【出願日】平成24年9月28日(2012.9.28)
【出願人】(510112671)ユー‐ブロックス、アクチエンゲゼルシャフト (15)
【氏名又は名称原語表記】U−BLOX A.G.
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2012−216271(P2012−216271)
【出願日】平成24年9月28日(2012.9.28)
【出願人】(510112671)ユー‐ブロックス、アクチエンゲゼルシャフト (15)
【氏名又は名称原語表記】U−BLOX A.G.
【Fターム(参考)】
[ Back to top ]