
侵入検知装置、侵入検知方法および侵入検知プログラム
【課題】人間の動作を高精度に検知することが可能な侵入検知装置、侵入検知方法および侵入検知プログラムを提供する。
【解決手段】侵入検知装置101は、所定エリアの状態を示す空間特徴量を算出するための空間特徴量算出部1と、空間特徴量算出部1によって算出された空間特徴量の時間的変化を算出するための変化レート算出部2と、変化レート算出部2によって算出された時間的変化に基づいて、所定エリアにおける人間の動作を検知するための検知部11とを備える。
【解決手段】侵入検知装置101は、所定エリアの状態を示す空間特徴量を算出するための空間特徴量算出部1と、空間特徴量算出部1によって算出された空間特徴量の時間的変化を算出するための変化レート算出部2と、変化レート算出部2によって算出された時間的変化に基づいて、所定エリアにおける人間の動作を検知するための検知部11とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、侵入検知装置、侵入検知方法および侵入検知プログラムに関し、特に、空間特徴量を用いて人間の動作を検知する侵入検知装置、侵入検知方法および侵入検知プログラムに関する。
【背景技術】
【0002】
室内等の所定エリアにおいて、人の動作を検知する侵入検知装置が開発されている。侵入検知方法の一例として、たとえば、「UWB−IRによる屋内侵入者検知に関する検討」寺阪圭司 他、電子情報通信学会論文誌B、第J90-B巻、第1号、pp.97-100、2007年1月1日(非特許文献1)には、UWB−IR(Ultra WideBand-Impulse Radio)による伝搬遅延プロファイルすなわち電力遅延プロファイルを用いる方法が開示されている。
【0003】
しかしながら、非特許文献1に記載の方法では、広帯域の信号を用いることから他の無線サービスとの干渉が問題となり、また、受信信号の電力を用いることから屋内におけるマルチパスフェージングの影響を受け、検出精度が劣化する場合がある。
【0004】
このような問題点を解決するための技術として、たとえば、特開2008ー216152号公報(特許文献1)には、以下のような構成が開示されている。すなわち、イベント検出装置は、各アレイアンテナの受信信号に基づいて固有ベクトルすなわち到来角分布を計算し、当該固有ベクトルと、比較基準となる平時の固有ベクトルとの内積値を計算する。そして、イベント検出装置は、この内積値と所定の閾値との比較結果に基づいて、イベントの発生すなわち侵入者の検知を行なう。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】「UWB−IRによる屋内侵入者検知に関する検討」寺阪圭司 他、電子情報通信学会論文誌B、第J90-B巻、第1号、pp.97-100、2007年1月1日
【特許文献】
【0006】
【特許文献1】特開2008ー216152号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ここで、特許文献1に記載の構成において算出する固有ベクトルの内積は、ターゲットである侵入者以外の要因によっても変化することは容易に推測できる。
【0008】
たとえば、ネズミおよび猫などの小動物、ならびに扇風機およびエアコンなどの各種装置の動作が空間の電波特性を変化させ、到来角分布に影響を及ぼすことは容易に想定できる。
【0009】
特許文献1では、種々のイベント検出を行なっているが、特に、人間の動作を検知する用途において、特許文献1に記載の構成を超えて、ターゲットである侵入者以外の変動を排除し、誤検知を抑制する技術が望まれる。
【0010】
この発明は、上述の課題を解決するためになされたもので、その目的は、人間の動作を高精度に検知することが可能な侵入検知装置、侵入検知方法および侵入検知プログラムを提供することである。
【課題を解決するための手段】
【0011】
(1)上記課題を解決するために、この発明のある局面に係わる侵入検知装置は、所定エリアの状態を示す空間特徴量を算出するための空間特徴量算出部と、上記空間特徴量算出部によって算出された上記空間特徴量の時間的変化を算出するための変化レート算出部と、上記変化レート算出部によって算出された上記時間的変化に基づいて、上記所定エリアにおける人間の動作を検知するための検知部とを備える。
【0012】
このように、空間特徴量の変動量の大きさではなく、空間特徴量の時間的変化を利用して人間の動作を検知する構成により、人間の動作以外の要因による変動を排除し、検知精度を向上させることができる。
【0013】
(2)好ましくは、上記検知部は、上記時間的変化が人間の動作に対応する所定の範囲に収まる場合には、上記所定エリアにおいて人間の動作が発生したと判定する。
【0014】
このような構成により、人間の動作による空間の状態変化の速度は所定の範囲内に収まる、という点に着目した検知動作を行なうことができるため、検知精度を向上させることができる。
【0015】
(3)より好ましくは、上記検知部は、上記時間的変化が上記所定の範囲に収まっている状態が所定時間以上継続した場合には、上記所定エリアにおいて人間の動作が発生したと判定する。
【0016】
このような構成により、人間の動作による空間の状態変化はある程度継続する、という点に着目した検知動作を行なうことができるため、検知精度を向上させることができる。
【0017】
(4)好ましくは、上記空間特徴量算出部は、算出した上記空間特徴量を示す信号を出力し、上記変化レート算出部は、上記時間的変化として、上記空間特徴量算出部から受けた上記信号の周波数成分を算出し、上記検知部は、上記変化レート算出部によって算出された上記周波数成分に基づいて、上記所定エリアにおける人間の動作を検知する。
【0018】
このように、空間特徴量の時間的変化として、空間特徴量の周波数成分を算出する構成により、空間特徴量の時間的変化を適切に評価することが可能となる。
【0019】
(5)より好ましくは、上記変化レート算出部は、人間の動作に対応する対象周波数帯域について、上記空間特徴量算出部から受けた上記信号の周波数成分のうち、上記対象周波数帯域外の成分を減衰させるための対象フィルタを含み、上記検知部は、上記対象フィルタを通過した上記信号に基づいて、上記所定エリアにおける人間の動作を検知する。
【0020】
このように、検知すべき空間特徴量の変動の範囲を、対象物固有の範囲、具体的には人間の侵入行動に対応する範囲に設定する構成により、検知精度をより向上させることができる。また、フーリエ変換を行なう構成ではなく、帯域フィルタを設ける構成により、信号のバッファリングが不要となり、検知時間を早めることが可能となる。
【0021】
(6)より好ましくは、上記検知部は、上記対象フィルタを通過した信号のレベルが所定の閾値以上である場合には、上記所定エリアにおいて人間の動作が発生したと判定する。
【0022】
このように、閾値を用いた判定を行なう構成により、簡易な処理で人間の動作の有無を検知することができる。
【0023】
(7)より好ましくは、上記変化レート算出部は、さらに、上記対象周波数帯域以外の帯域である非対象周波数帯域について、上記空間特徴量算出部から受けた上記信号の周波数成分のうち、上記非対象周波数帯域外の成分を減衰させるための1または複数の非対象フィルタを含み、上記検知部は、上記対象フィルタを通過した上記信号および各上記非対象フィルタを通過した上記信号に基づいて、上記所定エリアにおける人間の動作を検知する。
【0024】
このように、人間の動作に対応する帯域フィルタだけでなく、他の帯域のフィルタを設ける構成により、人間の動作に対応する帯域に加えて、他の帯域においても変化レートがある程度のレベルとなった場合に、各帯域における変化レートのレベルを比較することにより、人間の動作の有無を正確に検知することが可能となる。
【0025】
(8)より好ましくは、上記検知部は、上記対象フィルタを通過した信号および上記各非対象フィルタを通過した信号のうち、いずれの信号が最大のレベルを有するかに基づいて、上記所定エリアにおける人間の動作を検知する。
【0026】
このように、最大レベルを検出する構成により、簡易な比較処理で人間の動作の有無を検知することができる。
【0027】
(9)より好ましくは、上記検知部は、上記対象フィルタを通過した信号が最大のレベルを有する場合であって、上記対象フィルタを通過した信号のレベルが所定の閾値以上であるときには、上記所定エリアにおいて人間の動作が発生したと判定する。
【0028】
このように、比較処理に加えて閾値を用いた判定を行なう構成により、さらに正確に人間の動作の有無を検知することができる。
【0029】
(10)より好ましくは、上記変化レート算出部は、上記空間特徴量算出部から受けた上記信号に対してフーリエ変換を行い、上記フーリエ変換の結果において、人間の動きに対応する周波数帯における積分値を算出し、上記検知部は、上記変化レート算出部によって算出された上記積分値に基づいて、上記所定エリアにおける人間の動作を検知する。
【0030】
このような構成により、帯域フィルタを用いる構成と比べて、より正確に空間特徴量の時間的変化を評価することが可能となる。
【0031】
(11)より好ましくは、上記検知部は、上記積分値が所定の閾値以上である場合には、上記所定エリアにおいて人間の動作が発生したと判定する。
【0032】
このように、閾値を用いた判定を行なう構成により、簡易な処理で人間の動作の有無を検知することができる。
【0033】
(12)より好ましくは、上記所定の範囲は1Hz以下の範囲である。
【0034】
このように、検知すべき空間特徴量の変動の範囲を、人間の典型的な侵入行動に対応する範囲に設定する構成により、細かな調整を行なうことなく、検知精度を向上させることが可能となる。
【0035】
(13)より好ましくは、上記所定の範囲は、0Hzより大きく1Hzより小さい周波数以上、かつ1Hz以下の範囲である。
【0036】
このように、別の環境要因により生じる場合が多い低周波の変動成分を除去する構成により、検知精度をさらに向上させることが可能となる。
【0037】
(14)より好ましくは、上記所定の範囲は設定変更可能である。
【0038】
このような構成により、検知すべき空間特徴量の変動の範囲を、対象空間の電波伝搬環境に応じて設定することが可能となり、種々の環境に特化した検知動作を行なうことができる。
【0039】
(15)好ましくは、上記侵入検知装置は、さらに、上記空間特徴量算出部によって算出された上記空間特徴量のうち、規則的な変動成分を除去するための規則変動成分除去部を備え、上記変化レート算出部は、上記規則変動成分除去部によって除去された後の上記空間特徴量の時間的変化を算出する。
【0040】
これにより、何らかの装置による空間特徴量の規則的な変動など、侵入者による変動と比べて非常に優勢な変動成分を除去することができるため、安定して高い検知精度を得ることができる。
【0041】
(16)上記課題を解決するために、この発明のある局面に係わる侵入検知方法は、所定エリアの状態を示す空間特徴量を算出するステップと、算出した上記空間特徴量の時間的変化を算出するステップと、算出した上記時間的変化に基づいて、上記所定エリアにおける人間の動作を検知するステップとを含む。
【0042】
このように、空間特徴量の変動量の大きさではなく、空間特徴量の時間的変化を利用して人間の動作を検知する構成により、人間の動作以外の要因による変動を排除し、検知精度を向上させることができる。
【0043】
(17)上記課題を解決するために、この発明のある局面に係わる侵入検知プログラムは、コンピュータに、所定エリアの状態を示す空間特徴量を算出するステップと、算出した上記空間特徴量の時間的変化を算出するステップと、算出した上記時間的変化に基づいて、上記所定エリアにおける人間の動作を検知するステップとを実行させるためのプログラムである。
【0044】
このように、空間特徴量の変動量の大きさではなく、空間特徴量の時間的変化を利用して人間の動作を検知する構成により、人間の動作以外の要因による変動を排除し、検知精度を向上させることができる。
【発明の効果】
【0045】
本発明によれば、人間の動作を高精度に検知することができる。
【図面の簡単な説明】
【0046】
【図1】本発明の第1の実施の形態に係る侵入検知装置の構成を示す図である。
【図2】本発明の第1の実施の形態に係る侵入検知装置が侵入検知動作を行なう際の動作手順を定めたフローチャートである。
【図3】本発明の第1の実施の形態に係る侵入検知装置を用いた実験環境および実験内容を示す図である。
【図4】本発明の第1の実施の形態に係る侵入検知装置を用いた実験によって得られた内積値を示す図である。
【図5】本発明の第1の実施の形態に係る侵入検知装置を用いた実験によって得られた内積値を示す図である。
【図6】ケース1における変化レートの計算結果を示す図である。
【図7】ケース2における変化レートの計算結果を示す図である。
【図8】本発明の第1の実施の形態に係る侵入検知装置における変化レート算出部の構成を示す図である。
【図9】本発明の第1の実施の形態に係る侵入検知装置における変化レート算出部の変形例の構成を示す図である。
【図10】本発明の第2の実施の形態に係る侵入検知装置における変化レート算出部の構成を示す図である。
【図11】本発明の第2の実施の形態に係る侵入検知装置におけるくし形フィルタの構成を示す図である。
【図12】本発明の第3の実施の形態に係る侵入検知装置の構成を示す図である。
【図13】本発明の第3の実施の形態に係る侵入検知装置が侵入検知動作を行なう際の動作手順を定めたフローチャートである。
【図14】本発明の第4の実施の形態に係る侵入検知装置の構成を示す図である。
【発明を実施するための形態】
【0047】
以下、本発明の第1の実施の形態について図面を用いて説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰り返さない。
【0048】
<第1の実施の形態>
[構成および基本動作]
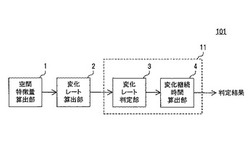
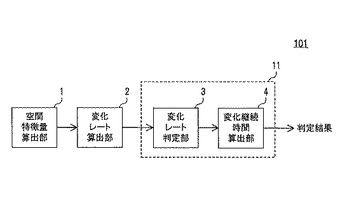
図1は、本発明の第1の実施の形態に係る侵入検知装置の構成を示す図である。
【0049】
侵入検知装置101は、室内等の所定エリアの状態を示す空間特徴量の変動を監視することにより、当該エリアにおける人間の動作を検知する。たとえば、侵入検知装置101は、反射および回折等の波動伝搬の性質に基づいて、所定エリア内の状態を監視する。具体的には、侵入検知装置101は、所定エリアに設けられた複数のアンテナの受信信号に基づいて計算された到来角分布を監視することにより、人間の動作を検知する。
【0050】
図1を参照して、侵入検知装置101は、空間特徴量算出部1と、変化レート算出部2と、検知部11とを備える。検知部11は、変化レート判定部3と、変化継続時間算出部4とを含む。
【0051】
空間特徴量算出部1は、人間の動作を検知すべき所定エリアについて、当該所定エリアの状態を示す空間特徴量を算出する。
【0052】
変化レート算出部2は、空間特徴量算出部1によって算出された空間特徴量の時間的変化を算出する。
【0053】
検知部11は、変化レート算出部2によって算出された時間的変化に基づいて、所定エリアにおける人間の動作を検知する。
【0054】
より詳細には、まず、空間特徴量算出部1は、たとえば特許文献1に記載の構成と同様に、到来角分布を用いて空間特徴量を抽出する。すなわち、空間特徴量算出部1は、固有ベクトルの内積を算出することにより、空間特徴量P(t)を抽出する。この内積は、比較基準となる初期ベクトルからの変化量を示す。初期ベクトルすなわち侵入者無しのときの固有ベクトルをvnoとし、観測時tにおける固有ベクトルをvob(t)とすると、空間特徴量P(t)は以下の式で表される。
P(t)=vno・vob(t)
【0055】
次に、変化レート算出部2は、空間特徴量の変化レートを計算する。この空間特徴量の変化レートは、言い換えれば、空間特徴量の時間的変化たとえば周期的変化を示す量である。変化レート算出部2は、たとえば0.1秒ごとに空間特徴量の変化レートを計算して出力する。
【0056】
空間特徴量が所定空間の状態量を適切に表すものであれば、当該空間特徴量の変化レートはターゲットに固有の特性を有すると考えられる。たとえば、小動物は人間に比べて高速に移動するため、小動物の変化レートは人間の変化レートよりも大きくなる。
【0057】
本発明の第1の実施の形態に係る侵入検知装置では、人間の侵入行動および空間の状態変化に関する考察において以下の(1)および(2)のポイントに注目した検知動作を行なう。すなわち、(1)人間の動作による空間の状態変化の速度は所定の範囲内に収まる。たとえば、鳥による空間の状態変化はきわめて瞬間的である。(2)人間の動作による空間の状態変化はある程度継続する。すなわち、侵入者は、侵入後、目的物を確保するために所定エリアにおいて一定時間滞在することが必要である。
【0058】
具体的には、検知部11は、空間特徴量の時間的変化が、人間の動作に対応する所定の範囲に収まる場合には、所定エリアにおいて人間の動作が発生したと判定する。この条件に加えて、検知部11は、当該時間的変化が所定の範囲に収まっている状態が所定時間以上継続した場合には、所定エリアにおいて人間の動作が発生したと判定してもよい。
【0059】
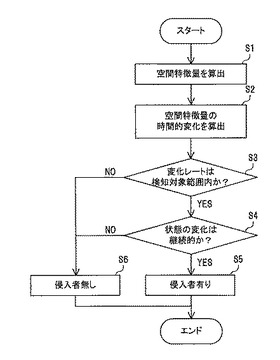
図2は、本発明の第1の実施の形態に係る侵入検知装置が侵入検知動作を行なう際の動作手順を定めたフローチャートである。侵入検知装置101は、フローチャートの各ステップを図示しないメモリから読み出して実行する。このプログラムは、外部からインストールすることができる。このインストールされるプログラムは、たとえば記録媒体に格納された状態で流通する。
【0060】
図2を参照して、まず、空間特徴量算出部1は、所定エリアの状態を示す空間特徴量を算出する(ステップS1)。
【0061】
次に、変化レート算出部2は、算出した空間特徴量の時間的変化を算出する(ステップS2)。
【0062】
次に、検知部11は、算出された時間的変化に基づいて、所定エリアにおける人間の動作を検知する。
【0063】
より詳細には、検知部11は、変化レート算出部2によって算出された変化レートが、人間の動作に対応する所定の検知対象範囲内でない場合には(ステップS3でNO)、測定された空間特徴量の変動が、人間の動作による変動ではないと判断し、侵入者無しと判定する(ステップS6)。これは、上記ポイント(1)に基づく判定である。
【0064】
また、検知部11は、変化レート算出部2によって算出された変化レートが検知対象範囲内である状態が継続的でない場合には(ステップS4でNO)、測定された空間特徴量の変動が、人間の動作による変動ではないと判断し、侵入者無しと判定する(ステップS6)。これは、上記ポイント(2)に基づく判定である。
【0065】
一方、検知部11は、変化レート算出部2によって算出された変化レートが検知対象範囲内である状態が継続的である場合には(ステップS3でYES、かつステップS4でYES)、測定された空間特徴量の変動が人間の動作による変動であると判断し、侵入者有りと判定する(ステップS5)。
【0066】
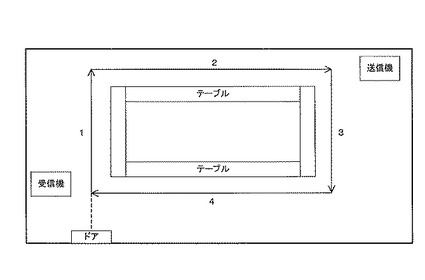
図3は、本発明の第1の実施の形態に係る侵入検知装置を用いた実験環境および実験内容を示す図である。
【0067】
図3を参照して、侵入検知装置101を用いて、図3に示すような部屋で実験を行なった。具体的には、室内に送信機および受信機を設け、対象者が図中の矢印1〜4の順番に従って室内を移動した際の、固有ベクトルの内積値の変動を測定した。ここで、固有ベクトルの内積値の計算においては、対象者が部屋に入室する前の状態における固有ベクトルを初期ベクトルvnoとした。
【0068】
図4は、本発明の第1の実施の形態に係る侵入検知装置を用いた実験によって得られた内積値を示す図である。
【0069】
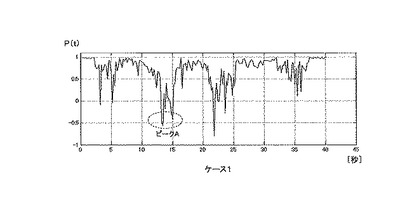
図4は、部屋に入室した対象者が、通常歩く速度で移動した場合(以下、ケース1と称する。)における内積値の変動を示している。
【0070】
図5は、本発明の第1の実施の形態に係る侵入検知装置を用いた実験によって得られた内積値を示す図である。
【0071】
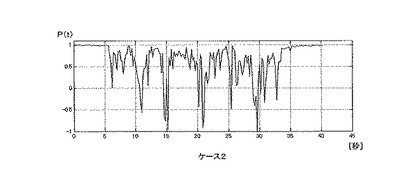
図5は、部屋に入室した対象者が、ケース1の2倍程度の速度で移動した場合(以下、ケース2と称する。)における内積値の変動を示している。
【0072】
ここで、たとえば図4のピークAで示す大きな変動がある区間は、対象者が受信機または送信機の付近を通過したタイミングに対応している。このような位置を対象者が通過すると、変動の大きさすなわち内積値は大きく変化する。このため、変動量そのもので対象物の識別を行なうのは一般に困難であると言える。
【0073】
そこで、侵入検知装置101では、特許文献1に記載の技術のように空間特徴量の変動量の大きさを利用するのではなく、変動量の時間的変化を利用する。
【0074】
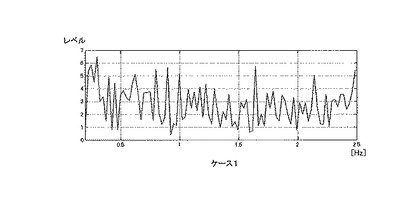
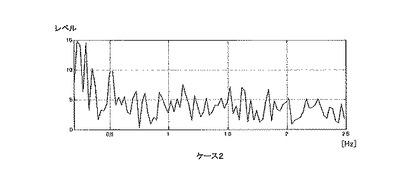
図6は、ケース1における変化レートの計算結果を示す図である。図7は、ケース2における変化レートの計算結果を示す図である。
【0075】
図6および図7は、内積値の変動の周波数分析結果、すなわち内積値に対して離散フーリエ変換を行なった結果を示しており、この結果が変化レートを示すことになる。
【0076】
通常、人間の侵入行動があった場合には、図6および図7に示すように、内積値の変動成分は、1Hz以下の範囲に集中し、1Hz以上の範囲と比べて密度が高い。
【0077】
また、人間の行動は一般に不規則であるため、変化レートの特性は、ある特定の周波数においてピークを持つのではなく、一定幅の周波数帯域に分散する特性となる。
【0078】
この実験結果に基づき、侵入検知装置101では、空間特徴量の変動が、侵入者の引き起こす可能性のある変化レートに相当するときに侵入者有りと判定する、という判断基準を採用した。
【0079】
再び図1を参照して、たとえば、空間特徴量算出部1は、算出した空間特徴量を示す信号を変化レート算出部2へ出力する。
【0080】
変化レート算出部2は、空間特徴量の時間的変化として、空間特徴量算出部1から受けた信号の周波数成分を算出する。
【0081】
検知部11は、変化レート算出部2によって算出された周波数成分に基づいて、所定エリアにおける人間の動作を検知する。
【0082】
図8は、本発明の第1の実施の形態に係る侵入検知装置における変化レート算出部の構成を示す図である。
【0083】
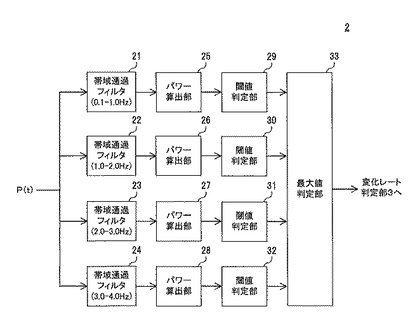
図8を参照して、変化レート算出部2は、帯域通過フィルタ21〜24と、パワー算出部25〜28と、閾値判定部29〜32と、最大値判定部33とを含む。
【0084】
帯域通過フィルタ21〜24は、たとえば所定範囲の変化レートを通過させる微分フィルタである。すなわち、帯域通過フィルタ21は、空間特徴量算出部1から受けた特徴量P(t)を示す信号の周波数成分のうち、人間の動作に対応する対象周波数帯域たとえば0.1〜1.0Hz以外の成分を減衰させる。
【0085】
また、帯域通過フィルタ22〜24は、空間特徴量算出部1から受けた特徴量P(t)を示す信号の周波数成分のうち、対象周波数帯域以外の帯域である非対象周波数帯域たとえば1.0〜2.0Hz、2.0〜3.0Hz、および3.0〜4.0Hz以外の成分を減衰させる。
【0086】
なお、各帯域通過フィルタの通過帯域は、一定幅でなくてもよいし、互いに重複していてもよい。各帯域通過フィルタの通過帯域を互いに重複させることにより、空間特徴量の変動を検出するための分解能を高めることができる。
【0087】
検知部11は、帯域通過フィルタ21を通過した信号および帯域通過フィルタ22〜24を通過した信号に基づいて、所定エリアにおける人間の動作を検知する。たとえば、検知部11は、帯域通過フィルタ21を通過した信号および各帯域通過フィルタ22〜24を通過した信号のうち、いずれの信号が最大のレベルを有するかに基づいて、所定エリアにおける人間の動作を検知する。より詳細には、検知部11は、帯域通過フィルタ21を通過した信号が最大のレベルを有する場合であって、帯域通過フィルタ21を通過した信号のレベルが所定の閾値以上であるときには、所定エリアにおいて人間の動作が発生したと判定する。
【0088】
より詳細には、パワー算出部25〜28は、帯域通過フィルタ22〜24を通過した信号の電力を算出する。なお、パワー算出部25〜28は、電力に限らず、たとえば、これらの信号の絶対値を算出してもよいし、これらの信号の二乗を算出してもよい。
【0089】
ここで、図6および図7に示すグラフが、パワー算出部25〜28から出力される信号に相当する。また、図4および図5に示すグラフが、空間特徴量算出部1から出力される信号に相当する。
【0090】
閾値判定部29〜32は、パワー算出部25〜28によって計算された電力と所定の閾値とを比較し、比較結果および当該電力を最大値判定部33へ出力する。この閾値は、侵入者無しの環境下で、適切な値を推定し、設定しておくことが望ましい。
【0091】
ここで、検知部11は、帯域通過フィルタ21〜24の出力信号のうち、閾値判定部29〜32において所定の閾値を超える信号が存在しない場合には、侵入者が存在しない、と判定する。
【0092】
最大値判定部33は、帯域通過フィルタ21〜24の出力信号のうち、閾値判定部29〜32において所定の閾値を超えた信号の中から、電力値が最大となる信号を選択する。そして、最大値判定部33は、選択した信号に対応する変化レートを示す信号を検知部11における最大値判定部33へ出力する。たとえば、最大値判定部33は、帯域通過フィルタ21の通過信号を選択した場合には、0.1〜1.0Hzを示す信号を出力する。
【0093】
検知部11において、変化レート判定部3は、変化レート算出部2によって抽出された変化レートが検知対象範囲に含まれるか否かを判定する。変化レート判定部3は、当該変化レートが検知対象範囲外である場合には、侵入者が存在しない、と判定する。
【0094】
この検知対象範囲は、前述の実験結果より、1Hz以下とすることが望ましい。さらに、あまりに周波数の低い変動成分は、別の環境要因により生じる可能性が高いことから、直流成分に近い0.1以下の成分は除去することが望ましい。また、高周波領域についてはやや余裕をもたせ、2Hz程度に設定することが望ましい。この場合、帯域通過フィルタ21の通過帯域は0.1〜2.0Hzに設定される。
【0095】
ここで、変化レートは電波の伝搬環境にも依存する。侵入検知装置101では、検知対象範囲は設定変更可能である。これにより、侵入検知の対象空間における伝搬環境に応じて検知対象範囲の調整を行なうことが可能となる。
【0096】
具体的には、侵入検知装置101を実動作させる前に、図3に示す実験のように人間が模擬的に室内を移動し、通常の歩行速度でどの程度の変動レートになるかを事前に測定しておく。そして、この測定結果を用いて検知対象範囲を決定する。
【0097】
変化継続時間算出部4は、変化レート判定部3の判定結果に基づいて、変化レートが検知対象範囲に含まれる状態が所定時間継続するか否かを監視する。
【0098】
この監視時間は、たとえば2秒以上とすることが望ましい。これは、侵入し、室内を物色し、脱出するという一連の侵入行動は瞬時的に起こるものではなく、所定時間かけて行われるからである。これにより、さらに高精度に判定を行なうことができる。
【0099】
図9は、本発明の第1の実施の形態に係る侵入検知装置における変化レート算出部の変形例の構成を示す図である。
【0100】
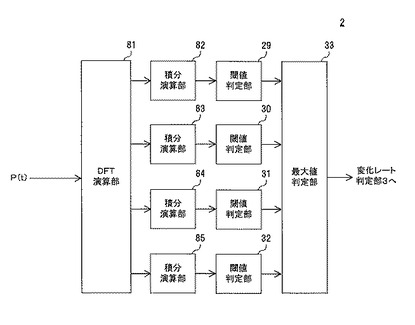
図9を参照して、この変化レート算出部2は、DFT(Discrete Fourier Transform)演算部81と、積分演算部82〜85と、閾値判定部29〜32と、最大値判定部33とを含む。
【0101】
変化レート算出部2は、空間特徴量算出部1から受けた信号に対してフーリエ変換を行い、フーリエ変換の結果において、人間の動きに対応する周波数帯における積分値を算出する。
【0102】
検知部11は、変化レート算出部2によって算出された積分値に基づいて、所定エリアにおける人間の動作を検知する。たとえば、検知部11は、当該積分値が所定の閾値以上である場合には、所定エリアにおいて人間の動作が発生したと判定する。
【0103】
より詳細には、DFT演算部81は、空間特徴量算出部1から受けた空間特徴量P(t)を示す信号に対してDFT演算を行い、演算結果を示す信号を出力する。
【0104】
積分演算部82〜85は、DFT演算部81から受けた信号のうち、対応の各帯域たとえば0.1〜1.0Hz、1.0〜2.0Hz、2.0〜3.0Hzおよび3.0〜4.0Hzにおける積分値を算出し、算出結果を示す信号を出力する。
【0105】
閾値判定部29〜32は、積分演算部82〜85によって計算された積分値と所定の閾値とを比較し、比較結果および当該積分値を最大値判定部33へ出力する。
【0106】
最大値判定部33は、DFT演算部81による演算結果における各帯域のうち、閾値判定部29〜32において所定の閾値を超えた帯域の中から、積分値が最大となる帯域を選択する。そして、最大値判定部33は、選択した帯域を示す信号を出力する。たとえば、最大値判定部33は、積分演算部82に対応する帯域を選択した場合には、0.1〜1.0Hzを示す信号を出力する。
【0107】
ところで、非特許文献1に記載の方法では、広帯域の信号を用いることから他の無線サービスとの干渉が問題となり、また、受信信号の電力を用いることから屋内におけるマルチパスフェージングの影響を受けてしまい、検出精度が劣化する場合がある。また、特許文献1に記載の構成において算出する固有ベクトルの内積は、ターゲットである侵入者以外の要因によっても変化するため、誤検知が生じる可能性がある。
【0108】
これに対して、本発明の第1の実施の形態に係る侵入検知装置では、空間特徴量算出部1は、所定エリアの状態を示す空間特徴量を算出する。変化レート算出部2は、空間特徴量算出部1によって算出された空間特徴量の時間的変化を算出する。そして、検知部11は、変化レート算出部2によって算出された時間的変化に基づいて、所定エリアにおける人間の動作を検知する。
【0109】
このように、空間特徴量の変動量の大きさではなく、空間特徴量の時間的変化を利用して人間の動作を検知する構成により、人間の動作以外の要因による変動を排除し、検知精度を向上させることができる。
【0110】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知部11は、変化レート算出部2によって算出された時間的変化が人間の動作に対応する所定の範囲に収まる場合には、所定エリアにおいて人間の動作が発生したと判定する。
【0111】
このような構成により、人間の動作による空間の状態変化の速度は所定の範囲内に収まる、という点に着目した検知動作を行なうことができるため、検知精度を向上させることができる。
【0112】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知部11は、変化レート算出部2によって算出された時間的変化が所定の範囲に収まっている状態が所定時間以上継続した場合には、所定エリアにおいて人間の動作が発生したと判定する。
【0113】
このような構成により、人間の動作による空間の状態変化はある程度継続する、という点に着目した検知動作を行なうことができるため、検知精度を向上させることができる。
【0114】
また、本発明の第1の実施の形態に係る侵入検知装置では、空間特徴量算出部1は、算出した空間特徴量を示す信号を出力する。そして、変化レート算出部2は、時間的変化として、空間特徴量算出部1から受けた信号の周波数成分を算出する。そして、検知部11は、変化レート算出部2によって算出された周波数成分に基づいて、所定エリアにおける人間の動作を検知する。
【0115】
このように、空間特徴量の時間的変化として、空間特徴量の周波数成分を算出する構成により、空間特徴量の時間的変化を適切に評価することが可能となる。
【0116】
また、本発明の第1の実施の形態に係る侵入検知装置では、帯域通過フィルタ21は、人間の動作に対応する対象周波数帯域について、空間特徴量算出部1から受けた信号の周波数成分のうち、対象周波数帯域外の成分を減衰させる。そして、検知部11は、帯域通過フィルタ21を通過した信号に基づいて、所定エリアにおける人間の動作を検知する。
【0117】
このように、検知すべき空間特徴量の変動の範囲を、対象物固有の範囲、具体的には人間の侵入行動に対応する範囲に設定する構成により、検知精度をより向上させることができる。また、図9に示すようなDFT演算部81を設ける構成ではなく、帯域フィルタを設ける構成により、信号のバッファリングが不要となり、検知時間を早めることが可能となる。
【0118】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知部11は、帯域通過フィルタ21を通過した信号のレベルが所定の閾値以上である場合には、所定エリアにおいて人間の動作が発生したと判定する。
【0119】
このように、閾値を用いた判定を行なう構成により、簡易な処理で人間の動作の有無を検知することができる。
【0120】
ここで、送信機または受信機の付近を動物または物体が通過した場合には、人間の動作に対応する帯域だけではなく、他の帯域においても変化レートのレベルが高くなる。このため、人間の動作に対応する帯域フィルタだけを用いる構成では、送信機または受信機の付近を動物または物体が通過したケースと、侵入者有りのケースとを判別することが困難な場合がある。
【0121】
これに対して、本発明の第1の実施の形態に係る侵入検知装置では、帯域通過フィルタ22〜24は、対象周波数帯域以外の帯域である非対象周波数帯域について、空間特徴量算出部1から受けた信号の周波数成分のうち、非対象周波数帯域外の成分を減衰させる。そして、検知部11は、帯域通過フィルタ21を通過した信号および帯域通過フィルタ22〜24を通過した信号に基づいて、所定エリアにおける人間の動作を検知する。
【0122】
このように、人間の動作に対応する帯域フィルタだけでなく、他の帯域のフィルタを設ける構成により、人間の動作に対応する帯域に加えて、他の帯域においても変化レートがある程度のレベルとなった場合に、各帯域における変化レートのレベルを比較することにより、人間の動作の有無を正確に検知することが可能となる。
【0123】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知部11は、帯域通過フィルタ21を通過した信号および帯域通過フィルタ22〜24を通過した信号のうち、いずれの信号が最大のレベルを有するかに基づいて、所定エリアにおける人間の動作を検知する。
【0124】
このように、最大レベルを検出する構成により、簡易な比較処理で人間の動作の有無を検知することができる。
【0125】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知部11は、帯域通過フィルタ21を通過した信号が最大のレベルを有する場合であって、帯域通過フィルタ21を通過した信号のレベルが所定の閾値以上であるときには、所定エリアにおいて人間の動作が発生したと判定する。
【0126】
このように、比較処理に加えて閾値を用いた判定を行なう構成により、さらに正確に人間の動作の有無を検知することができる。
【0127】
また、本発明の第1の実施の形態に係る侵入検知装置では、変化レート算出部2は、空間特徴量算出部1から受けた信号に対してフーリエ変換を行い、フーリエ変換の結果において、人間の動きに対応する周波数帯における積分値を算出する。そして、検知部11は、変化レート算出部2によって算出された積分値に基づいて、所定エリアにおける人間の動作を検知する。
【0128】
このような構成により、帯域フィルタを用いる構成と比べて、より正確に空間特徴量の時間的変化を評価することが可能となる。
【0129】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知部11は、積分値が所定の閾値以上である場合には、所定エリアにおいて人間の動作が発生したと判定する。
【0130】
このように、閾値を用いた判定を行なう構成により、簡易な処理で人間の動作の有無を検知することができる。
【0131】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知対象範囲は、1Hz以下の範囲である。
【0132】
このように、検知すべき空間特徴量の変動の範囲を、人間の典型的な侵入行動に対応する範囲に設定する構成により、細かな調整を行なうことなく、検知精度を向上させることが可能となる。
【0133】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知対象範囲は、0Hzより大きく1Hzより小さい周波数以上、かつ1Hz以下の範囲である。
【0134】
このように、別の環境要因により生じる場合が多い低周波の変動成分を除去する構成により、検知精度をさらに向上させることが可能となる。
【0135】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知対象範囲は設定変更可能である。
【0136】
このような構成により、検知すべき空間特徴量の変動の範囲を、対象空間の電波伝搬環境に応じて設定することが可能となり、種々の環境に特化した検知動作を行なうことができる。
【0137】
なお、本発明の第1の実施の形態に係る侵入検知装置では、空間特徴量として固有ベクトルを用いる構成であるとしたが、これに限定するものではない。固有ベクトルに限らず、非特許文献1に記載されているような遅延プロファイル等、他の空間特徴量を用いる構成であってもよい。
【0138】
また、本発明の第1の実施の形態に係る侵入検知装置では、空間特徴量として1次元の特徴量を用いる構成であるとしたが、これに限定するものではない。空間特徴量として多次元の特徴量を用いる構成であってもよい。たとえば、固有ベクトルそのものを特徴量ベクトルとして用いることも可能であるし、非特許文献1に記載されているような遅延プロファイルを用いることも可能である。
【0139】
また、本発明の第1の実施の形態に係る侵入検知装置では、侵入者の有無という二値的な判定を行なう構成であるとしたが、これに限定するものではない。侵入可能性のレベルを示す指標を出力する構成であってもよい。
【0140】
また、本発明の第1の実施の形態に係る侵入検知装置では、侵入検知装置は電波センサを用いる構成であるとしたが、これに限定するものではない。電波センサに限らず、種々のセンサ、たとえば超音波などの音波センサを用いる構成であってもよい。
【0141】
次に、本発明の他の実施の形態について図面を用いて説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰り返さない。
【0142】
<第2の実施の形態>
本実施の形態は、第1の実施の形態に係る侵入検知装置と比べて変化レート算出部の構成を変更した侵入検知装置に関する。以下で説明する内容以外は第1の実施の形態に係る侵入検知装置と同様である。
【0143】
図10は、本発明の第2の実施の形態に係る侵入検知装置における変化レート算出部の構成を示す図である。
【0144】
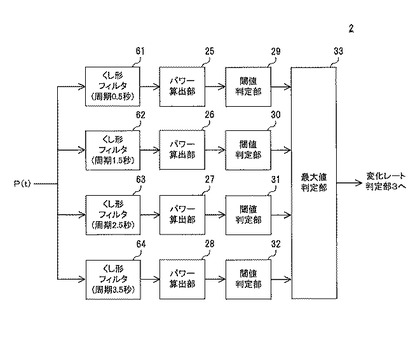
図10を参照して、変化レート算出部2は、本発明の第1の実施の形態に係る変化レート算出部と比べて、帯域通過フィルタ21〜24の代わりにくし形フィルタ61〜64を含む。
【0145】
変化レート算出部2は、空間特徴量の時間的変化として、空間特徴量算出部1から受けた空間特徴量を示す信号の周波数成分ではなく、当該信号の周期的変化を算出する。
【0146】
より詳細には、くし形フィルタ61〜64は、空間特徴量算出部1から受けた空間特徴量を示す信号のうち、所定の周期を有する信号を増幅して通過させる。たとえば、くし形フィルタ61〜64は、周期が0.5秒、1.5秒、2.5秒および3.5秒の信号をそれぞれ増幅して通過させる。
【0147】
パワー算出部25〜28は、くし形フィルタ61〜64を通過した信号の電力を算出する。
【0148】
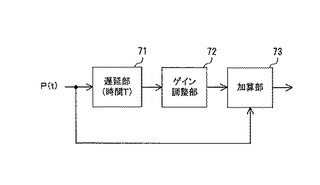
図11は、本発明の第2の実施の形態に係る侵入検知装置におけるくし形フィルタの構成を示す図である。
【0149】
図11を参照して、くし型フィルタは、遅延部71と、ゲイン調整部72と、加算部73とを含む。
【0150】
遅延部71は、空間特徴量算出部1から受けた空間特徴量P(t)を示す信号を時間T遅延させて出力する。
【0151】
ゲイン調整部72は、遅延部71から受けた信号のレベルを調整して出力する。
【0152】
加算部73は、ゲイン調整部72から受けた信号と、空間特徴量算出部1から受けた空間特徴量P(t)を示す信号とを加算して出力する。
【0153】
これにより、空間特徴量算出部1から受けた空間特徴量P(t)を示す信号から、周期Tを持つ信号、すなわち(1/T)Hzの変化レートを持つ信号を抽出することができる。
【0154】
このような構成でも、本発明の第1の実施の形態に係る侵入検知装置と同様に、人間の動作を高精度に検知することができる。
【0155】
その他の構成および動作は第1の実施の形態に係る侵入検知装置と同様であるため、ここでは詳細な説明を繰り返さない。
【0156】
次に、本発明の他の実施の形態について図面を用いて説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰り返さない。
【0157】
<第3の実施の形態>
本実施の形態は、第1の実施の形態に係る侵入検知装置と比べて空間特徴量のパターン判定をさらに行なう侵入検知装置に関する。以下で説明する内容以外は第1の実施の形態に係る侵入検知装置と同様である。
【0158】
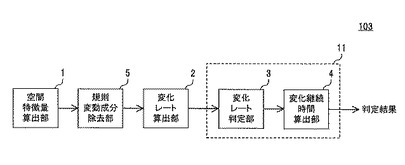
図12は、本発明の第3の実施の形態に係る侵入検知装置の構成を示す図である。
【0159】
図12を参照して、侵入検知装置103は、本発明の第1の実施の形態に係る侵入検知装置と比べて、さらに、規則変動成分除去部5を備える。
【0160】
規則変動成分除去部5は、たとえば線形予測フィルタであり、空間特徴量の規則的変動を除去する。すなわち、規則変動成分除去部5は、空間特徴量算出部1によって算出された空間特徴量のうち、規則的な変動成分を除去し、除去後の空間特徴量を変化レート算出部2へ出力する。
【0161】
変化レート算出部2は、規則変動成分除去部5によって除去された後の空間特徴量の時間的変化を算出する。
【0162】
このように、本発明の第3の実施の形態に係る侵入検知装置では、人間の侵入行動、および空間の状態変化に関する考察において、本発明の第1の実施の形態において注目したポイント(1)および(2)に加えて、以下のポイント(3)に注目する。すなわち、(3)人間の動作による空間の状態変化は不規則な変動パターンを持つ。たとえば、空調ファンなど、周期的な運動を繰り返す機械が存在する。
【0163】
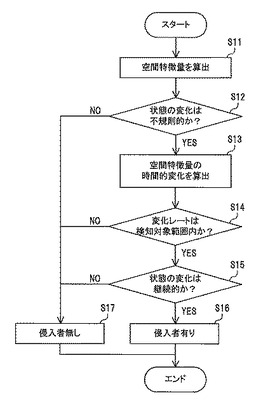
図13は、本発明の第3の実施の形態に係る侵入検知装置が侵入検知動作を行なう際の動作手順を定めたフローチャートである。侵入検知装置103は、フローチャートの各ステップを図示しないメモリから読み出して実行する。このプログラムは、外部からインストールすることができる。このインストールされるプログラムは、たとえば記録媒体に格納された状態で流通する。
【0164】
図13に示すステップS11,S13〜S17の動作は、図2に示すフローチャートにおけるステップS1〜S6とそれぞれ同様である。
【0165】
図13を参照して、空間特徴量が算出された後、検知部11は、当該空間特徴量の変動のパターンを分析する。すなわち、検知部11は、空間特徴量算出部1によって算出された空間特徴量が不規則的でない場合には(ステップS12でNO)、測定された空間特徴量の変動が、人間の動作による変動ではないと判断し、侵入者無しと判定する(ステップS17)。これは、上記ポイント(3)に基づく判定である。
【0166】
一方、検知部11は、空間特徴量算出部1によって算出された空間特徴量が不規則的であり(ステップS12でYES)、かつ変化レート算出部2によって算出された変化レートが検知対象範囲内である状態が継続的である場合には(ステップS14でYES、かつステップS15でYES)、測定された空間特徴量の変動が人間の動作による変動であると判断し、侵入者有りと判定する(ステップS16)。
【0167】
このように、本発明の第3の実施の形態に係る侵入検知装置では、規則変動成分除去部5は、空間特徴量算出部1によって算出された空間特徴量のうち、規則的な変動成分を除去する。そして、変化レート算出部2は、規則変動成分除去部5によって除去された後の空間特徴量の時間的変化を算出する。
【0168】
すなわち、検知部11は、空間特徴量の変動が周期的である場合には、当該変動が、空調ファンなどの機械的な運動等によるものであると判断し、侵入者無しと判定する。
【0169】
これにより、何らかの装置による空間特徴量の規則的な変動など、侵入者による変動と比べて非常に優勢な変動成分を除去することができるため、安定して高い検知精度を得ることができる。
【0170】
その他の構成および動作は第1の実施の形態に係る侵入検知装置と同様であるため、ここでは詳細な説明を繰り返さない。
【0171】
次に、本発明の他の実施の形態について図面を用いて説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰り返さない。
【0172】
<第4の実施の形態>
本実施の形態は、第1の実施の形態に係る侵入検知装置と比べて変化レート計算部の構成を簡易化した侵入検知装置に関する。以下で説明する内容以外は第1の実施の形態に係る侵入検知装置と同様である。
【0173】
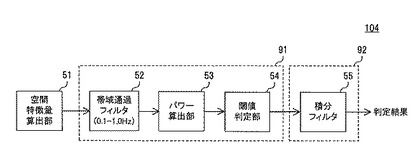
図14は、本発明の第4の実施の形態に係る侵入検知装置の構成を示す図である。
【0174】
図14を参照して、侵入検知装置104は、空間特徴量算出部51と、変化レート算出部91と、検知部92とを備える。変化レート算出部91は、帯域通過フィルタ52と、パワー算出部53と、閾値判定部54とを含む。検知部92は、積分フィルタ55を含む。
【0175】
空間特徴量算出部51は、侵入検知装置101における空間特徴量算出部1と同様に、到来角分布を用いて空間特徴量を抽出する。
【0176】
変化レート算出部91は、空間特徴量の変化レートを計算する。変化レート算出部91において、帯域通過フィルタ52は、侵入検知装置101における帯域通過フィルタ21と同様に、空間特徴量算出部51から受けた特徴量P(t)を示す信号の周波数成分のうち、人間の動作に対応する対象周波数帯域たとえば0.1〜1.0Hz以外の成分を減衰させる。
【0177】
検知部92は、帯域通過フィルタ52を通過した信号に基づいて、所定エリアにおける人間の動作を検知する。たとえば、検知部92は、帯域通過フィルタ52を通過した信号のレベルが所定の閾値以上である場合には、所定エリアにおいて人間の動作が発生したと判定する。
【0178】
より詳細には、パワー算出部53は、侵入検知装置101におけるパワー算出部25と同様に、帯域通過フィルタ52を通過した信号の電力を算出する。
【0179】
閾値判定部54は、侵入検知装置101における閾値判定部29と同様に、パワー算出部53によって計算された電力と所定の閾値とを比較し、比較結果を検知部92へ出力する。
【0180】
検知部92は、帯域通過フィルタ52の通過信号が所定の閾値を超えない場合には、侵入者が存在しない、と判定する。
【0181】
検知部92において、積分フィルタ55は、侵入検知装置101における変化継続時間算出部4と同様に、閾値判定部54の比較結果に基づいて、検知対象範囲の変動が所定時間継続するか否かを監視する。積分フィルタ55は、たとえば1次のローパスフィルタであり、帯域通過フィルタ52の通過信号が所定の閾値を超える状態が所定時間継続した場合には、侵入者が存在することを示す論理レベルの信号を出力する。
【0182】
なお、閾値判定部54は、積分フィルタ55の後段に設けられ、積分フィルタ55を通過した電力と所定の閾値とを比較する構成であってもよい。
【0183】
このように、本発明の第4の実施の形態に係る侵入検知装置では、複数の帯域通過フィルタを設けず、ターゲットとする帯域に対応する帯域通過フィルタのみを設ける。このような簡略化した構成でも、人間の動作を高精度に検知するという本発明の目的を達成することが可能である。
【0184】
その他の構成および動作は第1の実施の形態に係る侵入検知装置と同様であるため、ここでは詳細な説明を繰り返さない。
【0185】
上記実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記説明ではなく特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0186】
1 空間特徴量算出部
2 変化レート算出部
3 変化レート判定部
4 変化継続時間算出部
5 規則変動成分除去部
11 検知部
21〜24 帯域通過フィルタ
25〜28 パワー算出部
29〜32 閾値判定部
33 最大値判定部
51 空間特徴量算出部
52 帯域通過フィルタ
53 パワー算出部
54 閾値判定部
55 積分フィルタ
61〜64 くし形フィルタ
71 遅延部
72 ゲイン調整部
73 加算部
81 DFT演算部
82〜85 積分演算部
91 変化レート算出部
92 検知部
101,102,103,104 侵入検知装置
【技術分野】
【0001】
本発明は、侵入検知装置、侵入検知方法および侵入検知プログラムに関し、特に、空間特徴量を用いて人間の動作を検知する侵入検知装置、侵入検知方法および侵入検知プログラムに関する。
【背景技術】
【0002】
室内等の所定エリアにおいて、人の動作を検知する侵入検知装置が開発されている。侵入検知方法の一例として、たとえば、「UWB−IRによる屋内侵入者検知に関する検討」寺阪圭司 他、電子情報通信学会論文誌B、第J90-B巻、第1号、pp.97-100、2007年1月1日(非特許文献1)には、UWB−IR(Ultra WideBand-Impulse Radio)による伝搬遅延プロファイルすなわち電力遅延プロファイルを用いる方法が開示されている。
【0003】
しかしながら、非特許文献1に記載の方法では、広帯域の信号を用いることから他の無線サービスとの干渉が問題となり、また、受信信号の電力を用いることから屋内におけるマルチパスフェージングの影響を受け、検出精度が劣化する場合がある。
【0004】
このような問題点を解決するための技術として、たとえば、特開2008ー216152号公報(特許文献1)には、以下のような構成が開示されている。すなわち、イベント検出装置は、各アレイアンテナの受信信号に基づいて固有ベクトルすなわち到来角分布を計算し、当該固有ベクトルと、比較基準となる平時の固有ベクトルとの内積値を計算する。そして、イベント検出装置は、この内積値と所定の閾値との比較結果に基づいて、イベントの発生すなわち侵入者の検知を行なう。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】「UWB−IRによる屋内侵入者検知に関する検討」寺阪圭司 他、電子情報通信学会論文誌B、第J90-B巻、第1号、pp.97-100、2007年1月1日
【特許文献】
【0006】
【特許文献1】特開2008ー216152号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ここで、特許文献1に記載の構成において算出する固有ベクトルの内積は、ターゲットである侵入者以外の要因によっても変化することは容易に推測できる。
【0008】
たとえば、ネズミおよび猫などの小動物、ならびに扇風機およびエアコンなどの各種装置の動作が空間の電波特性を変化させ、到来角分布に影響を及ぼすことは容易に想定できる。
【0009】
特許文献1では、種々のイベント検出を行なっているが、特に、人間の動作を検知する用途において、特許文献1に記載の構成を超えて、ターゲットである侵入者以外の変動を排除し、誤検知を抑制する技術が望まれる。
【0010】
この発明は、上述の課題を解決するためになされたもので、その目的は、人間の動作を高精度に検知することが可能な侵入検知装置、侵入検知方法および侵入検知プログラムを提供することである。
【課題を解決するための手段】
【0011】
(1)上記課題を解決するために、この発明のある局面に係わる侵入検知装置は、所定エリアの状態を示す空間特徴量を算出するための空間特徴量算出部と、上記空間特徴量算出部によって算出された上記空間特徴量の時間的変化を算出するための変化レート算出部と、上記変化レート算出部によって算出された上記時間的変化に基づいて、上記所定エリアにおける人間の動作を検知するための検知部とを備える。
【0012】
このように、空間特徴量の変動量の大きさではなく、空間特徴量の時間的変化を利用して人間の動作を検知する構成により、人間の動作以外の要因による変動を排除し、検知精度を向上させることができる。
【0013】
(2)好ましくは、上記検知部は、上記時間的変化が人間の動作に対応する所定の範囲に収まる場合には、上記所定エリアにおいて人間の動作が発生したと判定する。
【0014】
このような構成により、人間の動作による空間の状態変化の速度は所定の範囲内に収まる、という点に着目した検知動作を行なうことができるため、検知精度を向上させることができる。
【0015】
(3)より好ましくは、上記検知部は、上記時間的変化が上記所定の範囲に収まっている状態が所定時間以上継続した場合には、上記所定エリアにおいて人間の動作が発生したと判定する。
【0016】
このような構成により、人間の動作による空間の状態変化はある程度継続する、という点に着目した検知動作を行なうことができるため、検知精度を向上させることができる。
【0017】
(4)好ましくは、上記空間特徴量算出部は、算出した上記空間特徴量を示す信号を出力し、上記変化レート算出部は、上記時間的変化として、上記空間特徴量算出部から受けた上記信号の周波数成分を算出し、上記検知部は、上記変化レート算出部によって算出された上記周波数成分に基づいて、上記所定エリアにおける人間の動作を検知する。
【0018】
このように、空間特徴量の時間的変化として、空間特徴量の周波数成分を算出する構成により、空間特徴量の時間的変化を適切に評価することが可能となる。
【0019】
(5)より好ましくは、上記変化レート算出部は、人間の動作に対応する対象周波数帯域について、上記空間特徴量算出部から受けた上記信号の周波数成分のうち、上記対象周波数帯域外の成分を減衰させるための対象フィルタを含み、上記検知部は、上記対象フィルタを通過した上記信号に基づいて、上記所定エリアにおける人間の動作を検知する。
【0020】
このように、検知すべき空間特徴量の変動の範囲を、対象物固有の範囲、具体的には人間の侵入行動に対応する範囲に設定する構成により、検知精度をより向上させることができる。また、フーリエ変換を行なう構成ではなく、帯域フィルタを設ける構成により、信号のバッファリングが不要となり、検知時間を早めることが可能となる。
【0021】
(6)より好ましくは、上記検知部は、上記対象フィルタを通過した信号のレベルが所定の閾値以上である場合には、上記所定エリアにおいて人間の動作が発生したと判定する。
【0022】
このように、閾値を用いた判定を行なう構成により、簡易な処理で人間の動作の有無を検知することができる。
【0023】
(7)より好ましくは、上記変化レート算出部は、さらに、上記対象周波数帯域以外の帯域である非対象周波数帯域について、上記空間特徴量算出部から受けた上記信号の周波数成分のうち、上記非対象周波数帯域外の成分を減衰させるための1または複数の非対象フィルタを含み、上記検知部は、上記対象フィルタを通過した上記信号および各上記非対象フィルタを通過した上記信号に基づいて、上記所定エリアにおける人間の動作を検知する。
【0024】
このように、人間の動作に対応する帯域フィルタだけでなく、他の帯域のフィルタを設ける構成により、人間の動作に対応する帯域に加えて、他の帯域においても変化レートがある程度のレベルとなった場合に、各帯域における変化レートのレベルを比較することにより、人間の動作の有無を正確に検知することが可能となる。
【0025】
(8)より好ましくは、上記検知部は、上記対象フィルタを通過した信号および上記各非対象フィルタを通過した信号のうち、いずれの信号が最大のレベルを有するかに基づいて、上記所定エリアにおける人間の動作を検知する。
【0026】
このように、最大レベルを検出する構成により、簡易な比較処理で人間の動作の有無を検知することができる。
【0027】
(9)より好ましくは、上記検知部は、上記対象フィルタを通過した信号が最大のレベルを有する場合であって、上記対象フィルタを通過した信号のレベルが所定の閾値以上であるときには、上記所定エリアにおいて人間の動作が発生したと判定する。
【0028】
このように、比較処理に加えて閾値を用いた判定を行なう構成により、さらに正確に人間の動作の有無を検知することができる。
【0029】
(10)より好ましくは、上記変化レート算出部は、上記空間特徴量算出部から受けた上記信号に対してフーリエ変換を行い、上記フーリエ変換の結果において、人間の動きに対応する周波数帯における積分値を算出し、上記検知部は、上記変化レート算出部によって算出された上記積分値に基づいて、上記所定エリアにおける人間の動作を検知する。
【0030】
このような構成により、帯域フィルタを用いる構成と比べて、より正確に空間特徴量の時間的変化を評価することが可能となる。
【0031】
(11)より好ましくは、上記検知部は、上記積分値が所定の閾値以上である場合には、上記所定エリアにおいて人間の動作が発生したと判定する。
【0032】
このように、閾値を用いた判定を行なう構成により、簡易な処理で人間の動作の有無を検知することができる。
【0033】
(12)より好ましくは、上記所定の範囲は1Hz以下の範囲である。
【0034】
このように、検知すべき空間特徴量の変動の範囲を、人間の典型的な侵入行動に対応する範囲に設定する構成により、細かな調整を行なうことなく、検知精度を向上させることが可能となる。
【0035】
(13)より好ましくは、上記所定の範囲は、0Hzより大きく1Hzより小さい周波数以上、かつ1Hz以下の範囲である。
【0036】
このように、別の環境要因により生じる場合が多い低周波の変動成分を除去する構成により、検知精度をさらに向上させることが可能となる。
【0037】
(14)より好ましくは、上記所定の範囲は設定変更可能である。
【0038】
このような構成により、検知すべき空間特徴量の変動の範囲を、対象空間の電波伝搬環境に応じて設定することが可能となり、種々の環境に特化した検知動作を行なうことができる。
【0039】
(15)好ましくは、上記侵入検知装置は、さらに、上記空間特徴量算出部によって算出された上記空間特徴量のうち、規則的な変動成分を除去するための規則変動成分除去部を備え、上記変化レート算出部は、上記規則変動成分除去部によって除去された後の上記空間特徴量の時間的変化を算出する。
【0040】
これにより、何らかの装置による空間特徴量の規則的な変動など、侵入者による変動と比べて非常に優勢な変動成分を除去することができるため、安定して高い検知精度を得ることができる。
【0041】
(16)上記課題を解決するために、この発明のある局面に係わる侵入検知方法は、所定エリアの状態を示す空間特徴量を算出するステップと、算出した上記空間特徴量の時間的変化を算出するステップと、算出した上記時間的変化に基づいて、上記所定エリアにおける人間の動作を検知するステップとを含む。
【0042】
このように、空間特徴量の変動量の大きさではなく、空間特徴量の時間的変化を利用して人間の動作を検知する構成により、人間の動作以外の要因による変動を排除し、検知精度を向上させることができる。
【0043】
(17)上記課題を解決するために、この発明のある局面に係わる侵入検知プログラムは、コンピュータに、所定エリアの状態を示す空間特徴量を算出するステップと、算出した上記空間特徴量の時間的変化を算出するステップと、算出した上記時間的変化に基づいて、上記所定エリアにおける人間の動作を検知するステップとを実行させるためのプログラムである。
【0044】
このように、空間特徴量の変動量の大きさではなく、空間特徴量の時間的変化を利用して人間の動作を検知する構成により、人間の動作以外の要因による変動を排除し、検知精度を向上させることができる。
【発明の効果】
【0045】
本発明によれば、人間の動作を高精度に検知することができる。
【図面の簡単な説明】
【0046】
【図1】本発明の第1の実施の形態に係る侵入検知装置の構成を示す図である。
【図2】本発明の第1の実施の形態に係る侵入検知装置が侵入検知動作を行なう際の動作手順を定めたフローチャートである。
【図3】本発明の第1の実施の形態に係る侵入検知装置を用いた実験環境および実験内容を示す図である。
【図4】本発明の第1の実施の形態に係る侵入検知装置を用いた実験によって得られた内積値を示す図である。
【図5】本発明の第1の実施の形態に係る侵入検知装置を用いた実験によって得られた内積値を示す図である。
【図6】ケース1における変化レートの計算結果を示す図である。
【図7】ケース2における変化レートの計算結果を示す図である。
【図8】本発明の第1の実施の形態に係る侵入検知装置における変化レート算出部の構成を示す図である。
【図9】本発明の第1の実施の形態に係る侵入検知装置における変化レート算出部の変形例の構成を示す図である。
【図10】本発明の第2の実施の形態に係る侵入検知装置における変化レート算出部の構成を示す図である。
【図11】本発明の第2の実施の形態に係る侵入検知装置におけるくし形フィルタの構成を示す図である。
【図12】本発明の第3の実施の形態に係る侵入検知装置の構成を示す図である。
【図13】本発明の第3の実施の形態に係る侵入検知装置が侵入検知動作を行なう際の動作手順を定めたフローチャートである。
【図14】本発明の第4の実施の形態に係る侵入検知装置の構成を示す図である。
【発明を実施するための形態】
【0047】
以下、本発明の第1の実施の形態について図面を用いて説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰り返さない。
【0048】
<第1の実施の形態>
[構成および基本動作]
図1は、本発明の第1の実施の形態に係る侵入検知装置の構成を示す図である。
【0049】
侵入検知装置101は、室内等の所定エリアの状態を示す空間特徴量の変動を監視することにより、当該エリアにおける人間の動作を検知する。たとえば、侵入検知装置101は、反射および回折等の波動伝搬の性質に基づいて、所定エリア内の状態を監視する。具体的には、侵入検知装置101は、所定エリアに設けられた複数のアンテナの受信信号に基づいて計算された到来角分布を監視することにより、人間の動作を検知する。
【0050】
図1を参照して、侵入検知装置101は、空間特徴量算出部1と、変化レート算出部2と、検知部11とを備える。検知部11は、変化レート判定部3と、変化継続時間算出部4とを含む。
【0051】
空間特徴量算出部1は、人間の動作を検知すべき所定エリアについて、当該所定エリアの状態を示す空間特徴量を算出する。
【0052】
変化レート算出部2は、空間特徴量算出部1によって算出された空間特徴量の時間的変化を算出する。
【0053】
検知部11は、変化レート算出部2によって算出された時間的変化に基づいて、所定エリアにおける人間の動作を検知する。
【0054】
より詳細には、まず、空間特徴量算出部1は、たとえば特許文献1に記載の構成と同様に、到来角分布を用いて空間特徴量を抽出する。すなわち、空間特徴量算出部1は、固有ベクトルの内積を算出することにより、空間特徴量P(t)を抽出する。この内積は、比較基準となる初期ベクトルからの変化量を示す。初期ベクトルすなわち侵入者無しのときの固有ベクトルをvnoとし、観測時tにおける固有ベクトルをvob(t)とすると、空間特徴量P(t)は以下の式で表される。
P(t)=vno・vob(t)
【0055】
次に、変化レート算出部2は、空間特徴量の変化レートを計算する。この空間特徴量の変化レートは、言い換えれば、空間特徴量の時間的変化たとえば周期的変化を示す量である。変化レート算出部2は、たとえば0.1秒ごとに空間特徴量の変化レートを計算して出力する。
【0056】
空間特徴量が所定空間の状態量を適切に表すものであれば、当該空間特徴量の変化レートはターゲットに固有の特性を有すると考えられる。たとえば、小動物は人間に比べて高速に移動するため、小動物の変化レートは人間の変化レートよりも大きくなる。
【0057】
本発明の第1の実施の形態に係る侵入検知装置では、人間の侵入行動および空間の状態変化に関する考察において以下の(1)および(2)のポイントに注目した検知動作を行なう。すなわち、(1)人間の動作による空間の状態変化の速度は所定の範囲内に収まる。たとえば、鳥による空間の状態変化はきわめて瞬間的である。(2)人間の動作による空間の状態変化はある程度継続する。すなわち、侵入者は、侵入後、目的物を確保するために所定エリアにおいて一定時間滞在することが必要である。
【0058】
具体的には、検知部11は、空間特徴量の時間的変化が、人間の動作に対応する所定の範囲に収まる場合には、所定エリアにおいて人間の動作が発生したと判定する。この条件に加えて、検知部11は、当該時間的変化が所定の範囲に収まっている状態が所定時間以上継続した場合には、所定エリアにおいて人間の動作が発生したと判定してもよい。
【0059】
図2は、本発明の第1の実施の形態に係る侵入検知装置が侵入検知動作を行なう際の動作手順を定めたフローチャートである。侵入検知装置101は、フローチャートの各ステップを図示しないメモリから読み出して実行する。このプログラムは、外部からインストールすることができる。このインストールされるプログラムは、たとえば記録媒体に格納された状態で流通する。
【0060】
図2を参照して、まず、空間特徴量算出部1は、所定エリアの状態を示す空間特徴量を算出する(ステップS1)。
【0061】
次に、変化レート算出部2は、算出した空間特徴量の時間的変化を算出する(ステップS2)。
【0062】
次に、検知部11は、算出された時間的変化に基づいて、所定エリアにおける人間の動作を検知する。
【0063】
より詳細には、検知部11は、変化レート算出部2によって算出された変化レートが、人間の動作に対応する所定の検知対象範囲内でない場合には(ステップS3でNO)、測定された空間特徴量の変動が、人間の動作による変動ではないと判断し、侵入者無しと判定する(ステップS6)。これは、上記ポイント(1)に基づく判定である。
【0064】
また、検知部11は、変化レート算出部2によって算出された変化レートが検知対象範囲内である状態が継続的でない場合には(ステップS4でNO)、測定された空間特徴量の変動が、人間の動作による変動ではないと判断し、侵入者無しと判定する(ステップS6)。これは、上記ポイント(2)に基づく判定である。
【0065】
一方、検知部11は、変化レート算出部2によって算出された変化レートが検知対象範囲内である状態が継続的である場合には(ステップS3でYES、かつステップS4でYES)、測定された空間特徴量の変動が人間の動作による変動であると判断し、侵入者有りと判定する(ステップS5)。
【0066】
図3は、本発明の第1の実施の形態に係る侵入検知装置を用いた実験環境および実験内容を示す図である。
【0067】
図3を参照して、侵入検知装置101を用いて、図3に示すような部屋で実験を行なった。具体的には、室内に送信機および受信機を設け、対象者が図中の矢印1〜4の順番に従って室内を移動した際の、固有ベクトルの内積値の変動を測定した。ここで、固有ベクトルの内積値の計算においては、対象者が部屋に入室する前の状態における固有ベクトルを初期ベクトルvnoとした。
【0068】
図4は、本発明の第1の実施の形態に係る侵入検知装置を用いた実験によって得られた内積値を示す図である。
【0069】
図4は、部屋に入室した対象者が、通常歩く速度で移動した場合(以下、ケース1と称する。)における内積値の変動を示している。
【0070】
図5は、本発明の第1の実施の形態に係る侵入検知装置を用いた実験によって得られた内積値を示す図である。
【0071】
図5は、部屋に入室した対象者が、ケース1の2倍程度の速度で移動した場合(以下、ケース2と称する。)における内積値の変動を示している。
【0072】
ここで、たとえば図4のピークAで示す大きな変動がある区間は、対象者が受信機または送信機の付近を通過したタイミングに対応している。このような位置を対象者が通過すると、変動の大きさすなわち内積値は大きく変化する。このため、変動量そのもので対象物の識別を行なうのは一般に困難であると言える。
【0073】
そこで、侵入検知装置101では、特許文献1に記載の技術のように空間特徴量の変動量の大きさを利用するのではなく、変動量の時間的変化を利用する。
【0074】
図6は、ケース1における変化レートの計算結果を示す図である。図7は、ケース2における変化レートの計算結果を示す図である。
【0075】
図6および図7は、内積値の変動の周波数分析結果、すなわち内積値に対して離散フーリエ変換を行なった結果を示しており、この結果が変化レートを示すことになる。
【0076】
通常、人間の侵入行動があった場合には、図6および図7に示すように、内積値の変動成分は、1Hz以下の範囲に集中し、1Hz以上の範囲と比べて密度が高い。
【0077】
また、人間の行動は一般に不規則であるため、変化レートの特性は、ある特定の周波数においてピークを持つのではなく、一定幅の周波数帯域に分散する特性となる。
【0078】
この実験結果に基づき、侵入検知装置101では、空間特徴量の変動が、侵入者の引き起こす可能性のある変化レートに相当するときに侵入者有りと判定する、という判断基準を採用した。
【0079】
再び図1を参照して、たとえば、空間特徴量算出部1は、算出した空間特徴量を示す信号を変化レート算出部2へ出力する。
【0080】
変化レート算出部2は、空間特徴量の時間的変化として、空間特徴量算出部1から受けた信号の周波数成分を算出する。
【0081】
検知部11は、変化レート算出部2によって算出された周波数成分に基づいて、所定エリアにおける人間の動作を検知する。
【0082】
図8は、本発明の第1の実施の形態に係る侵入検知装置における変化レート算出部の構成を示す図である。
【0083】
図8を参照して、変化レート算出部2は、帯域通過フィルタ21〜24と、パワー算出部25〜28と、閾値判定部29〜32と、最大値判定部33とを含む。
【0084】
帯域通過フィルタ21〜24は、たとえば所定範囲の変化レートを通過させる微分フィルタである。すなわち、帯域通過フィルタ21は、空間特徴量算出部1から受けた特徴量P(t)を示す信号の周波数成分のうち、人間の動作に対応する対象周波数帯域たとえば0.1〜1.0Hz以外の成分を減衰させる。
【0085】
また、帯域通過フィルタ22〜24は、空間特徴量算出部1から受けた特徴量P(t)を示す信号の周波数成分のうち、対象周波数帯域以外の帯域である非対象周波数帯域たとえば1.0〜2.0Hz、2.0〜3.0Hz、および3.0〜4.0Hz以外の成分を減衰させる。
【0086】
なお、各帯域通過フィルタの通過帯域は、一定幅でなくてもよいし、互いに重複していてもよい。各帯域通過フィルタの通過帯域を互いに重複させることにより、空間特徴量の変動を検出するための分解能を高めることができる。
【0087】
検知部11は、帯域通過フィルタ21を通過した信号および帯域通過フィルタ22〜24を通過した信号に基づいて、所定エリアにおける人間の動作を検知する。たとえば、検知部11は、帯域通過フィルタ21を通過した信号および各帯域通過フィルタ22〜24を通過した信号のうち、いずれの信号が最大のレベルを有するかに基づいて、所定エリアにおける人間の動作を検知する。より詳細には、検知部11は、帯域通過フィルタ21を通過した信号が最大のレベルを有する場合であって、帯域通過フィルタ21を通過した信号のレベルが所定の閾値以上であるときには、所定エリアにおいて人間の動作が発生したと判定する。
【0088】
より詳細には、パワー算出部25〜28は、帯域通過フィルタ22〜24を通過した信号の電力を算出する。なお、パワー算出部25〜28は、電力に限らず、たとえば、これらの信号の絶対値を算出してもよいし、これらの信号の二乗を算出してもよい。
【0089】
ここで、図6および図7に示すグラフが、パワー算出部25〜28から出力される信号に相当する。また、図4および図5に示すグラフが、空間特徴量算出部1から出力される信号に相当する。
【0090】
閾値判定部29〜32は、パワー算出部25〜28によって計算された電力と所定の閾値とを比較し、比較結果および当該電力を最大値判定部33へ出力する。この閾値は、侵入者無しの環境下で、適切な値を推定し、設定しておくことが望ましい。
【0091】
ここで、検知部11は、帯域通過フィルタ21〜24の出力信号のうち、閾値判定部29〜32において所定の閾値を超える信号が存在しない場合には、侵入者が存在しない、と判定する。
【0092】
最大値判定部33は、帯域通過フィルタ21〜24の出力信号のうち、閾値判定部29〜32において所定の閾値を超えた信号の中から、電力値が最大となる信号を選択する。そして、最大値判定部33は、選択した信号に対応する変化レートを示す信号を検知部11における最大値判定部33へ出力する。たとえば、最大値判定部33は、帯域通過フィルタ21の通過信号を選択した場合には、0.1〜1.0Hzを示す信号を出力する。
【0093】
検知部11において、変化レート判定部3は、変化レート算出部2によって抽出された変化レートが検知対象範囲に含まれるか否かを判定する。変化レート判定部3は、当該変化レートが検知対象範囲外である場合には、侵入者が存在しない、と判定する。
【0094】
この検知対象範囲は、前述の実験結果より、1Hz以下とすることが望ましい。さらに、あまりに周波数の低い変動成分は、別の環境要因により生じる可能性が高いことから、直流成分に近い0.1以下の成分は除去することが望ましい。また、高周波領域についてはやや余裕をもたせ、2Hz程度に設定することが望ましい。この場合、帯域通過フィルタ21の通過帯域は0.1〜2.0Hzに設定される。
【0095】
ここで、変化レートは電波の伝搬環境にも依存する。侵入検知装置101では、検知対象範囲は設定変更可能である。これにより、侵入検知の対象空間における伝搬環境に応じて検知対象範囲の調整を行なうことが可能となる。
【0096】
具体的には、侵入検知装置101を実動作させる前に、図3に示す実験のように人間が模擬的に室内を移動し、通常の歩行速度でどの程度の変動レートになるかを事前に測定しておく。そして、この測定結果を用いて検知対象範囲を決定する。
【0097】
変化継続時間算出部4は、変化レート判定部3の判定結果に基づいて、変化レートが検知対象範囲に含まれる状態が所定時間継続するか否かを監視する。
【0098】
この監視時間は、たとえば2秒以上とすることが望ましい。これは、侵入し、室内を物色し、脱出するという一連の侵入行動は瞬時的に起こるものではなく、所定時間かけて行われるからである。これにより、さらに高精度に判定を行なうことができる。
【0099】
図9は、本発明の第1の実施の形態に係る侵入検知装置における変化レート算出部の変形例の構成を示す図である。
【0100】
図9を参照して、この変化レート算出部2は、DFT(Discrete Fourier Transform)演算部81と、積分演算部82〜85と、閾値判定部29〜32と、最大値判定部33とを含む。
【0101】
変化レート算出部2は、空間特徴量算出部1から受けた信号に対してフーリエ変換を行い、フーリエ変換の結果において、人間の動きに対応する周波数帯における積分値を算出する。
【0102】
検知部11は、変化レート算出部2によって算出された積分値に基づいて、所定エリアにおける人間の動作を検知する。たとえば、検知部11は、当該積分値が所定の閾値以上である場合には、所定エリアにおいて人間の動作が発生したと判定する。
【0103】
より詳細には、DFT演算部81は、空間特徴量算出部1から受けた空間特徴量P(t)を示す信号に対してDFT演算を行い、演算結果を示す信号を出力する。
【0104】
積分演算部82〜85は、DFT演算部81から受けた信号のうち、対応の各帯域たとえば0.1〜1.0Hz、1.0〜2.0Hz、2.0〜3.0Hzおよび3.0〜4.0Hzにおける積分値を算出し、算出結果を示す信号を出力する。
【0105】
閾値判定部29〜32は、積分演算部82〜85によって計算された積分値と所定の閾値とを比較し、比較結果および当該積分値を最大値判定部33へ出力する。
【0106】
最大値判定部33は、DFT演算部81による演算結果における各帯域のうち、閾値判定部29〜32において所定の閾値を超えた帯域の中から、積分値が最大となる帯域を選択する。そして、最大値判定部33は、選択した帯域を示す信号を出力する。たとえば、最大値判定部33は、積分演算部82に対応する帯域を選択した場合には、0.1〜1.0Hzを示す信号を出力する。
【0107】
ところで、非特許文献1に記載の方法では、広帯域の信号を用いることから他の無線サービスとの干渉が問題となり、また、受信信号の電力を用いることから屋内におけるマルチパスフェージングの影響を受けてしまい、検出精度が劣化する場合がある。また、特許文献1に記載の構成において算出する固有ベクトルの内積は、ターゲットである侵入者以外の要因によっても変化するため、誤検知が生じる可能性がある。
【0108】
これに対して、本発明の第1の実施の形態に係る侵入検知装置では、空間特徴量算出部1は、所定エリアの状態を示す空間特徴量を算出する。変化レート算出部2は、空間特徴量算出部1によって算出された空間特徴量の時間的変化を算出する。そして、検知部11は、変化レート算出部2によって算出された時間的変化に基づいて、所定エリアにおける人間の動作を検知する。
【0109】
このように、空間特徴量の変動量の大きさではなく、空間特徴量の時間的変化を利用して人間の動作を検知する構成により、人間の動作以外の要因による変動を排除し、検知精度を向上させることができる。
【0110】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知部11は、変化レート算出部2によって算出された時間的変化が人間の動作に対応する所定の範囲に収まる場合には、所定エリアにおいて人間の動作が発生したと判定する。
【0111】
このような構成により、人間の動作による空間の状態変化の速度は所定の範囲内に収まる、という点に着目した検知動作を行なうことができるため、検知精度を向上させることができる。
【0112】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知部11は、変化レート算出部2によって算出された時間的変化が所定の範囲に収まっている状態が所定時間以上継続した場合には、所定エリアにおいて人間の動作が発生したと判定する。
【0113】
このような構成により、人間の動作による空間の状態変化はある程度継続する、という点に着目した検知動作を行なうことができるため、検知精度を向上させることができる。
【0114】
また、本発明の第1の実施の形態に係る侵入検知装置では、空間特徴量算出部1は、算出した空間特徴量を示す信号を出力する。そして、変化レート算出部2は、時間的変化として、空間特徴量算出部1から受けた信号の周波数成分を算出する。そして、検知部11は、変化レート算出部2によって算出された周波数成分に基づいて、所定エリアにおける人間の動作を検知する。
【0115】
このように、空間特徴量の時間的変化として、空間特徴量の周波数成分を算出する構成により、空間特徴量の時間的変化を適切に評価することが可能となる。
【0116】
また、本発明の第1の実施の形態に係る侵入検知装置では、帯域通過フィルタ21は、人間の動作に対応する対象周波数帯域について、空間特徴量算出部1から受けた信号の周波数成分のうち、対象周波数帯域外の成分を減衰させる。そして、検知部11は、帯域通過フィルタ21を通過した信号に基づいて、所定エリアにおける人間の動作を検知する。
【0117】
このように、検知すべき空間特徴量の変動の範囲を、対象物固有の範囲、具体的には人間の侵入行動に対応する範囲に設定する構成により、検知精度をより向上させることができる。また、図9に示すようなDFT演算部81を設ける構成ではなく、帯域フィルタを設ける構成により、信号のバッファリングが不要となり、検知時間を早めることが可能となる。
【0118】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知部11は、帯域通過フィルタ21を通過した信号のレベルが所定の閾値以上である場合には、所定エリアにおいて人間の動作が発生したと判定する。
【0119】
このように、閾値を用いた判定を行なう構成により、簡易な処理で人間の動作の有無を検知することができる。
【0120】
ここで、送信機または受信機の付近を動物または物体が通過した場合には、人間の動作に対応する帯域だけではなく、他の帯域においても変化レートのレベルが高くなる。このため、人間の動作に対応する帯域フィルタだけを用いる構成では、送信機または受信機の付近を動物または物体が通過したケースと、侵入者有りのケースとを判別することが困難な場合がある。
【0121】
これに対して、本発明の第1の実施の形態に係る侵入検知装置では、帯域通過フィルタ22〜24は、対象周波数帯域以外の帯域である非対象周波数帯域について、空間特徴量算出部1から受けた信号の周波数成分のうち、非対象周波数帯域外の成分を減衰させる。そして、検知部11は、帯域通過フィルタ21を通過した信号および帯域通過フィルタ22〜24を通過した信号に基づいて、所定エリアにおける人間の動作を検知する。
【0122】
このように、人間の動作に対応する帯域フィルタだけでなく、他の帯域のフィルタを設ける構成により、人間の動作に対応する帯域に加えて、他の帯域においても変化レートがある程度のレベルとなった場合に、各帯域における変化レートのレベルを比較することにより、人間の動作の有無を正確に検知することが可能となる。
【0123】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知部11は、帯域通過フィルタ21を通過した信号および帯域通過フィルタ22〜24を通過した信号のうち、いずれの信号が最大のレベルを有するかに基づいて、所定エリアにおける人間の動作を検知する。
【0124】
このように、最大レベルを検出する構成により、簡易な比較処理で人間の動作の有無を検知することができる。
【0125】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知部11は、帯域通過フィルタ21を通過した信号が最大のレベルを有する場合であって、帯域通過フィルタ21を通過した信号のレベルが所定の閾値以上であるときには、所定エリアにおいて人間の動作が発生したと判定する。
【0126】
このように、比較処理に加えて閾値を用いた判定を行なう構成により、さらに正確に人間の動作の有無を検知することができる。
【0127】
また、本発明の第1の実施の形態に係る侵入検知装置では、変化レート算出部2は、空間特徴量算出部1から受けた信号に対してフーリエ変換を行い、フーリエ変換の結果において、人間の動きに対応する周波数帯における積分値を算出する。そして、検知部11は、変化レート算出部2によって算出された積分値に基づいて、所定エリアにおける人間の動作を検知する。
【0128】
このような構成により、帯域フィルタを用いる構成と比べて、より正確に空間特徴量の時間的変化を評価することが可能となる。
【0129】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知部11は、積分値が所定の閾値以上である場合には、所定エリアにおいて人間の動作が発生したと判定する。
【0130】
このように、閾値を用いた判定を行なう構成により、簡易な処理で人間の動作の有無を検知することができる。
【0131】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知対象範囲は、1Hz以下の範囲である。
【0132】
このように、検知すべき空間特徴量の変動の範囲を、人間の典型的な侵入行動に対応する範囲に設定する構成により、細かな調整を行なうことなく、検知精度を向上させることが可能となる。
【0133】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知対象範囲は、0Hzより大きく1Hzより小さい周波数以上、かつ1Hz以下の範囲である。
【0134】
このように、別の環境要因により生じる場合が多い低周波の変動成分を除去する構成により、検知精度をさらに向上させることが可能となる。
【0135】
また、本発明の第1の実施の形態に係る侵入検知装置では、検知対象範囲は設定変更可能である。
【0136】
このような構成により、検知すべき空間特徴量の変動の範囲を、対象空間の電波伝搬環境に応じて設定することが可能となり、種々の環境に特化した検知動作を行なうことができる。
【0137】
なお、本発明の第1の実施の形態に係る侵入検知装置では、空間特徴量として固有ベクトルを用いる構成であるとしたが、これに限定するものではない。固有ベクトルに限らず、非特許文献1に記載されているような遅延プロファイル等、他の空間特徴量を用いる構成であってもよい。
【0138】
また、本発明の第1の実施の形態に係る侵入検知装置では、空間特徴量として1次元の特徴量を用いる構成であるとしたが、これに限定するものではない。空間特徴量として多次元の特徴量を用いる構成であってもよい。たとえば、固有ベクトルそのものを特徴量ベクトルとして用いることも可能であるし、非特許文献1に記載されているような遅延プロファイルを用いることも可能である。
【0139】
また、本発明の第1の実施の形態に係る侵入検知装置では、侵入者の有無という二値的な判定を行なう構成であるとしたが、これに限定するものではない。侵入可能性のレベルを示す指標を出力する構成であってもよい。
【0140】
また、本発明の第1の実施の形態に係る侵入検知装置では、侵入検知装置は電波センサを用いる構成であるとしたが、これに限定するものではない。電波センサに限らず、種々のセンサ、たとえば超音波などの音波センサを用いる構成であってもよい。
【0141】
次に、本発明の他の実施の形態について図面を用いて説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰り返さない。
【0142】
<第2の実施の形態>
本実施の形態は、第1の実施の形態に係る侵入検知装置と比べて変化レート算出部の構成を変更した侵入検知装置に関する。以下で説明する内容以外は第1の実施の形態に係る侵入検知装置と同様である。
【0143】
図10は、本発明の第2の実施の形態に係る侵入検知装置における変化レート算出部の構成を示す図である。
【0144】
図10を参照して、変化レート算出部2は、本発明の第1の実施の形態に係る変化レート算出部と比べて、帯域通過フィルタ21〜24の代わりにくし形フィルタ61〜64を含む。
【0145】
変化レート算出部2は、空間特徴量の時間的変化として、空間特徴量算出部1から受けた空間特徴量を示す信号の周波数成分ではなく、当該信号の周期的変化を算出する。
【0146】
より詳細には、くし形フィルタ61〜64は、空間特徴量算出部1から受けた空間特徴量を示す信号のうち、所定の周期を有する信号を増幅して通過させる。たとえば、くし形フィルタ61〜64は、周期が0.5秒、1.5秒、2.5秒および3.5秒の信号をそれぞれ増幅して通過させる。
【0147】
パワー算出部25〜28は、くし形フィルタ61〜64を通過した信号の電力を算出する。
【0148】
図11は、本発明の第2の実施の形態に係る侵入検知装置におけるくし形フィルタの構成を示す図である。
【0149】
図11を参照して、くし型フィルタは、遅延部71と、ゲイン調整部72と、加算部73とを含む。
【0150】
遅延部71は、空間特徴量算出部1から受けた空間特徴量P(t)を示す信号を時間T遅延させて出力する。
【0151】
ゲイン調整部72は、遅延部71から受けた信号のレベルを調整して出力する。
【0152】
加算部73は、ゲイン調整部72から受けた信号と、空間特徴量算出部1から受けた空間特徴量P(t)を示す信号とを加算して出力する。
【0153】
これにより、空間特徴量算出部1から受けた空間特徴量P(t)を示す信号から、周期Tを持つ信号、すなわち(1/T)Hzの変化レートを持つ信号を抽出することができる。
【0154】
このような構成でも、本発明の第1の実施の形態に係る侵入検知装置と同様に、人間の動作を高精度に検知することができる。
【0155】
その他の構成および動作は第1の実施の形態に係る侵入検知装置と同様であるため、ここでは詳細な説明を繰り返さない。
【0156】
次に、本発明の他の実施の形態について図面を用いて説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰り返さない。
【0157】
<第3の実施の形態>
本実施の形態は、第1の実施の形態に係る侵入検知装置と比べて空間特徴量のパターン判定をさらに行なう侵入検知装置に関する。以下で説明する内容以外は第1の実施の形態に係る侵入検知装置と同様である。
【0158】
図12は、本発明の第3の実施の形態に係る侵入検知装置の構成を示す図である。
【0159】
図12を参照して、侵入検知装置103は、本発明の第1の実施の形態に係る侵入検知装置と比べて、さらに、規則変動成分除去部5を備える。
【0160】
規則変動成分除去部5は、たとえば線形予測フィルタであり、空間特徴量の規則的変動を除去する。すなわち、規則変動成分除去部5は、空間特徴量算出部1によって算出された空間特徴量のうち、規則的な変動成分を除去し、除去後の空間特徴量を変化レート算出部2へ出力する。
【0161】
変化レート算出部2は、規則変動成分除去部5によって除去された後の空間特徴量の時間的変化を算出する。
【0162】
このように、本発明の第3の実施の形態に係る侵入検知装置では、人間の侵入行動、および空間の状態変化に関する考察において、本発明の第1の実施の形態において注目したポイント(1)および(2)に加えて、以下のポイント(3)に注目する。すなわち、(3)人間の動作による空間の状態変化は不規則な変動パターンを持つ。たとえば、空調ファンなど、周期的な運動を繰り返す機械が存在する。
【0163】
図13は、本発明の第3の実施の形態に係る侵入検知装置が侵入検知動作を行なう際の動作手順を定めたフローチャートである。侵入検知装置103は、フローチャートの各ステップを図示しないメモリから読み出して実行する。このプログラムは、外部からインストールすることができる。このインストールされるプログラムは、たとえば記録媒体に格納された状態で流通する。
【0164】
図13に示すステップS11,S13〜S17の動作は、図2に示すフローチャートにおけるステップS1〜S6とそれぞれ同様である。
【0165】
図13を参照して、空間特徴量が算出された後、検知部11は、当該空間特徴量の変動のパターンを分析する。すなわち、検知部11は、空間特徴量算出部1によって算出された空間特徴量が不規則的でない場合には(ステップS12でNO)、測定された空間特徴量の変動が、人間の動作による変動ではないと判断し、侵入者無しと判定する(ステップS17)。これは、上記ポイント(3)に基づく判定である。
【0166】
一方、検知部11は、空間特徴量算出部1によって算出された空間特徴量が不規則的であり(ステップS12でYES)、かつ変化レート算出部2によって算出された変化レートが検知対象範囲内である状態が継続的である場合には(ステップS14でYES、かつステップS15でYES)、測定された空間特徴量の変動が人間の動作による変動であると判断し、侵入者有りと判定する(ステップS16)。
【0167】
このように、本発明の第3の実施の形態に係る侵入検知装置では、規則変動成分除去部5は、空間特徴量算出部1によって算出された空間特徴量のうち、規則的な変動成分を除去する。そして、変化レート算出部2は、規則変動成分除去部5によって除去された後の空間特徴量の時間的変化を算出する。
【0168】
すなわち、検知部11は、空間特徴量の変動が周期的である場合には、当該変動が、空調ファンなどの機械的な運動等によるものであると判断し、侵入者無しと判定する。
【0169】
これにより、何らかの装置による空間特徴量の規則的な変動など、侵入者による変動と比べて非常に優勢な変動成分を除去することができるため、安定して高い検知精度を得ることができる。
【0170】
その他の構成および動作は第1の実施の形態に係る侵入検知装置と同様であるため、ここでは詳細な説明を繰り返さない。
【0171】
次に、本発明の他の実施の形態について図面を用いて説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰り返さない。
【0172】
<第4の実施の形態>
本実施の形態は、第1の実施の形態に係る侵入検知装置と比べて変化レート計算部の構成を簡易化した侵入検知装置に関する。以下で説明する内容以外は第1の実施の形態に係る侵入検知装置と同様である。
【0173】
図14は、本発明の第4の実施の形態に係る侵入検知装置の構成を示す図である。
【0174】
図14を参照して、侵入検知装置104は、空間特徴量算出部51と、変化レート算出部91と、検知部92とを備える。変化レート算出部91は、帯域通過フィルタ52と、パワー算出部53と、閾値判定部54とを含む。検知部92は、積分フィルタ55を含む。
【0175】
空間特徴量算出部51は、侵入検知装置101における空間特徴量算出部1と同様に、到来角分布を用いて空間特徴量を抽出する。
【0176】
変化レート算出部91は、空間特徴量の変化レートを計算する。変化レート算出部91において、帯域通過フィルタ52は、侵入検知装置101における帯域通過フィルタ21と同様に、空間特徴量算出部51から受けた特徴量P(t)を示す信号の周波数成分のうち、人間の動作に対応する対象周波数帯域たとえば0.1〜1.0Hz以外の成分を減衰させる。
【0177】
検知部92は、帯域通過フィルタ52を通過した信号に基づいて、所定エリアにおける人間の動作を検知する。たとえば、検知部92は、帯域通過フィルタ52を通過した信号のレベルが所定の閾値以上である場合には、所定エリアにおいて人間の動作が発生したと判定する。
【0178】
より詳細には、パワー算出部53は、侵入検知装置101におけるパワー算出部25と同様に、帯域通過フィルタ52を通過した信号の電力を算出する。
【0179】
閾値判定部54は、侵入検知装置101における閾値判定部29と同様に、パワー算出部53によって計算された電力と所定の閾値とを比較し、比較結果を検知部92へ出力する。
【0180】
検知部92は、帯域通過フィルタ52の通過信号が所定の閾値を超えない場合には、侵入者が存在しない、と判定する。
【0181】
検知部92において、積分フィルタ55は、侵入検知装置101における変化継続時間算出部4と同様に、閾値判定部54の比較結果に基づいて、検知対象範囲の変動が所定時間継続するか否かを監視する。積分フィルタ55は、たとえば1次のローパスフィルタであり、帯域通過フィルタ52の通過信号が所定の閾値を超える状態が所定時間継続した場合には、侵入者が存在することを示す論理レベルの信号を出力する。
【0182】
なお、閾値判定部54は、積分フィルタ55の後段に設けられ、積分フィルタ55を通過した電力と所定の閾値とを比較する構成であってもよい。
【0183】
このように、本発明の第4の実施の形態に係る侵入検知装置では、複数の帯域通過フィルタを設けず、ターゲットとする帯域に対応する帯域通過フィルタのみを設ける。このような簡略化した構成でも、人間の動作を高精度に検知するという本発明の目的を達成することが可能である。
【0184】
その他の構成および動作は第1の実施の形態に係る侵入検知装置と同様であるため、ここでは詳細な説明を繰り返さない。
【0185】
上記実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記説明ではなく特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0186】
1 空間特徴量算出部
2 変化レート算出部
3 変化レート判定部
4 変化継続時間算出部
5 規則変動成分除去部
11 検知部
21〜24 帯域通過フィルタ
25〜28 パワー算出部
29〜32 閾値判定部
33 最大値判定部
51 空間特徴量算出部
52 帯域通過フィルタ
53 パワー算出部
54 閾値判定部
55 積分フィルタ
61〜64 くし形フィルタ
71 遅延部
72 ゲイン調整部
73 加算部
81 DFT演算部
82〜85 積分演算部
91 変化レート算出部
92 検知部
101,102,103,104 侵入検知装置
【特許請求の範囲】
【請求項1】
所定エリアの状態を示す空間特徴量を算出するための空間特徴量算出部と、
前記空間特徴量算出部によって算出された前記空間特徴量の時間的変化を算出するための変化レート算出部と、
前記変化レート算出部によって算出された前記時間的変化に基づいて、前記所定エリアにおける人間の動作を検知するための検知部とを備える、侵入検知装置。
【請求項2】
前記検知部は、前記時間的変化が人間の動作に対応する所定の範囲に収まる場合には、前記所定エリアにおいて人間の動作が発生したと判定する、請求項1に記載の侵入検知装置。
【請求項3】
前記検知部は、前記時間的変化が前記所定の範囲に収まっている状態が所定時間以上継続した場合には、前記所定エリアにおいて人間の動作が発生したと判定する、請求項2に記載の侵入検知装置。
【請求項4】
前記空間特徴量算出部は、算出した前記空間特徴量を示す信号を出力し、
前記変化レート算出部は、前記時間的変化として、前記空間特徴量算出部から受けた前記信号の周波数成分を算出し、
前記検知部は、前記変化レート算出部によって算出された前記周波数成分に基づいて、前記所定エリアにおける人間の動作を検知する、請求項1から3のいずれか1項に記載の侵入検知装置。
【請求項5】
前記変化レート算出部は、人間の動作に対応する対象周波数帯域について、前記空間特徴量算出部から受けた前記信号の周波数成分のうち、前記対象周波数帯域外の成分を減衰させるための対象フィルタを含み、
前記検知部は、前記対象フィルタを通過した前記信号に基づいて、前記所定エリアにおける人間の動作を検知する、請求項4に記載の侵入検知装置。
【請求項6】
前記検知部は、前記対象フィルタを通過した信号のレベルが所定の閾値以上である場合には、前記所定エリアにおいて人間の動作が発生したと判定する、請求項5に記載の侵入検知装置。
【請求項7】
前記変化レート算出部は、さらに、前記対象周波数帯域以外の帯域である非対象周波数帯域について、前記空間特徴量算出部から受けた前記信号の周波数成分のうち、前記非対象周波数帯域外の成分を減衰させるための1または複数の非対象フィルタを含み、
前記検知部は、前記対象フィルタを通過した前記信号および各前記非対象フィルタを通過した前記信号に基づいて、前記所定エリアにおける人間の動作を検知する、請求項5に記載の侵入検知装置。
【請求項8】
前記検知部は、前記対象フィルタを通過した信号および前記各非対象フィルタを通過した信号のうち、いずれの信号が最大のレベルを有するかに基づいて、前記所定エリアにおける人間の動作を検知する、請求項7に記載の侵入検知装置。
【請求項9】
前記検知部は、前記対象フィルタを通過した信号が最大のレベルを有する場合であって、前記対象フィルタを通過した信号のレベルが所定の閾値以上であるときには、前記所定エリアにおいて人間の動作が発生したと判定する、請求項8に記載の侵入検知装置。
【請求項10】
前記変化レート算出部は、前記空間特徴量算出部から受けた前記信号に対してフーリエ変換を行い、前記フーリエ変換の結果において、人間の動きに対応する周波数帯における積分値を算出し、
前記検知部は、前記変化レート算出部によって算出された前記積分値に基づいて、前記所定エリアにおける人間の動作を検知する、請求項4に記載の侵入検知装置。
【請求項11】
前記検知部は、前記積分値が所定の閾値以上である場合には、前記所定エリアにおいて人間の動作が発生したと判定する、請求項10に記載の侵入検知装置。
【請求項12】
前記所定の範囲は1Hz以下の範囲である、請求項2または3に記載の侵入検知装置。
【請求項13】
前記所定の範囲は、0Hzより大きく1Hzより小さい周波数以上、かつ1Hz以下の範囲である、請求項2、3、および12のいずれか1項に記載の侵入検知装置。
【請求項14】
前記所定の範囲は設定変更可能である、請求項2、3、12および13のいずれか1項に記載の侵入検知装置。
【請求項15】
前記侵入検知装置は、さらに、
前記空間特徴量算出部によって算出された前記空間特徴量のうち、規則的な変動成分を除去するための規則変動成分除去部を備え、
前記変化レート算出部は、前記規則変動成分除去部によって除去された後の前記空間特徴量の時間的変化を算出する、請求項1から14のいずれか1項に記載の侵入検知装置。
【請求項16】
所定エリアの状態を示す空間特徴量を算出するステップと、
算出した前記空間特徴量の時間的変化を算出するステップと、
算出した前記時間的変化に基づいて、前記所定エリアにおける人間の動作を検知するステップとを含む、侵入検知方法。
【請求項17】
コンピュータに、
所定エリアの状態を示す空間特徴量を算出するステップと、
算出した前記空間特徴量の時間的変化を算出するステップと、
算出した前記時間的変化に基づいて、前記所定エリアにおける人間の動作を検知するステップとを実行させるための、侵入検知プログラム。
【請求項1】
所定エリアの状態を示す空間特徴量を算出するための空間特徴量算出部と、
前記空間特徴量算出部によって算出された前記空間特徴量の時間的変化を算出するための変化レート算出部と、
前記変化レート算出部によって算出された前記時間的変化に基づいて、前記所定エリアにおける人間の動作を検知するための検知部とを備える、侵入検知装置。
【請求項2】
前記検知部は、前記時間的変化が人間の動作に対応する所定の範囲に収まる場合には、前記所定エリアにおいて人間の動作が発生したと判定する、請求項1に記載の侵入検知装置。
【請求項3】
前記検知部は、前記時間的変化が前記所定の範囲に収まっている状態が所定時間以上継続した場合には、前記所定エリアにおいて人間の動作が発生したと判定する、請求項2に記載の侵入検知装置。
【請求項4】
前記空間特徴量算出部は、算出した前記空間特徴量を示す信号を出力し、
前記変化レート算出部は、前記時間的変化として、前記空間特徴量算出部から受けた前記信号の周波数成分を算出し、
前記検知部は、前記変化レート算出部によって算出された前記周波数成分に基づいて、前記所定エリアにおける人間の動作を検知する、請求項1から3のいずれか1項に記載の侵入検知装置。
【請求項5】
前記変化レート算出部は、人間の動作に対応する対象周波数帯域について、前記空間特徴量算出部から受けた前記信号の周波数成分のうち、前記対象周波数帯域外の成分を減衰させるための対象フィルタを含み、
前記検知部は、前記対象フィルタを通過した前記信号に基づいて、前記所定エリアにおける人間の動作を検知する、請求項4に記載の侵入検知装置。
【請求項6】
前記検知部は、前記対象フィルタを通過した信号のレベルが所定の閾値以上である場合には、前記所定エリアにおいて人間の動作が発生したと判定する、請求項5に記載の侵入検知装置。
【請求項7】
前記変化レート算出部は、さらに、前記対象周波数帯域以外の帯域である非対象周波数帯域について、前記空間特徴量算出部から受けた前記信号の周波数成分のうち、前記非対象周波数帯域外の成分を減衰させるための1または複数の非対象フィルタを含み、
前記検知部は、前記対象フィルタを通過した前記信号および各前記非対象フィルタを通過した前記信号に基づいて、前記所定エリアにおける人間の動作を検知する、請求項5に記載の侵入検知装置。
【請求項8】
前記検知部は、前記対象フィルタを通過した信号および前記各非対象フィルタを通過した信号のうち、いずれの信号が最大のレベルを有するかに基づいて、前記所定エリアにおける人間の動作を検知する、請求項7に記載の侵入検知装置。
【請求項9】
前記検知部は、前記対象フィルタを通過した信号が最大のレベルを有する場合であって、前記対象フィルタを通過した信号のレベルが所定の閾値以上であるときには、前記所定エリアにおいて人間の動作が発生したと判定する、請求項8に記載の侵入検知装置。
【請求項10】
前記変化レート算出部は、前記空間特徴量算出部から受けた前記信号に対してフーリエ変換を行い、前記フーリエ変換の結果において、人間の動きに対応する周波数帯における積分値を算出し、
前記検知部は、前記変化レート算出部によって算出された前記積分値に基づいて、前記所定エリアにおける人間の動作を検知する、請求項4に記載の侵入検知装置。
【請求項11】
前記検知部は、前記積分値が所定の閾値以上である場合には、前記所定エリアにおいて人間の動作が発生したと判定する、請求項10に記載の侵入検知装置。
【請求項12】
前記所定の範囲は1Hz以下の範囲である、請求項2または3に記載の侵入検知装置。
【請求項13】
前記所定の範囲は、0Hzより大きく1Hzより小さい周波数以上、かつ1Hz以下の範囲である、請求項2、3、および12のいずれか1項に記載の侵入検知装置。
【請求項14】
前記所定の範囲は設定変更可能である、請求項2、3、12および13のいずれか1項に記載の侵入検知装置。
【請求項15】
前記侵入検知装置は、さらに、
前記空間特徴量算出部によって算出された前記空間特徴量のうち、規則的な変動成分を除去するための規則変動成分除去部を備え、
前記変化レート算出部は、前記規則変動成分除去部によって除去された後の前記空間特徴量の時間的変化を算出する、請求項1から14のいずれか1項に記載の侵入検知装置。
【請求項16】
所定エリアの状態を示す空間特徴量を算出するステップと、
算出した前記空間特徴量の時間的変化を算出するステップと、
算出した前記時間的変化に基づいて、前記所定エリアにおける人間の動作を検知するステップとを含む、侵入検知方法。
【請求項17】
コンピュータに、
所定エリアの状態を示す空間特徴量を算出するステップと、
算出した前記空間特徴量の時間的変化を算出するステップと、
算出した前記時間的変化に基づいて、前記所定エリアにおける人間の動作を検知するステップとを実行させるための、侵入検知プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−155603(P2012−155603A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−15265(P2011−15265)
【出願日】平成23年1月27日(2011.1.27)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月27日(2011.1.27)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]