
信憑性検証の方法、製品、および装置
【課題】信憑性検証の方法、製品、および装置を提供する。
【解決手段】物品が属するクラスの包括的タイプを識別するために、紙またはボール紙から作られた物品からのクラスシグネチャを判定する方法および装置。光ビームが、物品を照らし、検出器配置が、物品がビームによってスキャンされる時に物品の多数の異なる部分から散乱される光からデータ点を収集する。クラスシグネチャは、製紙用パルプの脱水中に使用されるスクリーンによって(と思われる)製造中に紙/ボール紙に分け与えられる固有特性に由来する。クラスシグネチャの検出は、紙を作った製造業者または特定の製紙機械を識別することを可能にする。
【解決手段】物品が属するクラスの包括的タイプを識別するために、紙またはボール紙から作られた物品からのクラスシグネチャを判定する方法および装置。光ビームが、物品を照らし、検出器配置が、物品がビームによってスキャンされる時に物品の多数の異なる部分から散乱される光からデータ点を収集する。クラスシグネチャは、製紙用パルプの脱水中に使用されるスクリーンによって(と思われる)製造中に紙/ボール紙に分け与えられる固有特性に由来する。クラスシグネチャの検出は、紙を作った製造業者または特定の製紙機械を識別することを可能にする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、セキュリティ方法、より具体的には、紙もしくはボール紙などの繊維質のシート材料から作られた、個人識別(ID)カード、銀行券、販売可能な製品、文書、または他の品目などの物品の信憑性の検証に関する。
【背景技術】
【0002】
多くの伝統的な認証セキュリティシステムは、製造業者以外の者が実行困難であるプロセスに依存する。この困難性は、資本設備の出費、技術的ノウハウの複雑さ、または好ましくはその両方によって強いられる。その例は、銀行券の透かしおよびクレジットカードまたはパスポートのホログラムの提供である。残念ながら、犯罪者は、より洗練されつつあり、事実上、元の製造業者が再生可能なもの全てを再生することができる。
【0003】
これゆえに、各トークンが一意であること、およびより重要なことに、測定可能でありしたがって後続検証の基礎として使用できる一意の特性を各トークンが有することをもたらす自然法則によって決定されるあるプロセスを使用してセキュリティトークンを作成することに依存する認証セキュリティシステムに対する既知の手法がある。この手法によれば、トークンは、一意の特性を取得する1組の形で製造され、測定される。次に、この特性を、コンピュータデータベースに保管し、または他の形で保存することができる。このタイプのトークンは、担体物品、例えば銀行券、パスポート、IDカード、重要な文書に組み込むことができる。その後、この担体物品をもう一度測定することができ、測定された特性を、データベースに保管された特性と比較して、一致があるかどうかを確定することができる。
【0004】
この一般的な手法の中で、異なる物理的効果を使用することが提案されてきた。複数の従来技術文書[1〜4]で検討された1つの物理的効果が、物品の固有特性からの、通常は特殊なトークンの形のレーザスペックルを使用して、一意の特性を提供することである。これらの技法によれば、特殊なトークンの全体など、大きい面積が、平行レーザビームによって照らされ、結果のスペックルパターンの大きい立体角部分が、CCDを用いて結像され、これによって、データ点からなる大きいアレイで構成される照射区域のスペックルパターンイメージを取得する。
【0005】
より最近に、さらなるレーザスペックルベースの技法が開発され[5]、この技法では、一意の特性が、集光されたレーザビームを物品上でスキャンすることと、多数の独立のデータ点を収集するために、物品の多数の異なる部分で散乱された光から通常は500個以上の多数のデータ点を収集することによって取得される。物品の多数の異なる部分に固有の多数の独立の信号寄与を収集することによって、スキャンされた物品の区域に固有のデジタルシグネチャを計算することができる。この技法は、未処理の紙、ボール紙、およびプラスチックを含む非常に様々な物品の表面から一意のシグネチャを提供することができる。
【0006】
この技法の重要な応用分野が、以下で「マスタデータベース」と称する保管されたシグネチャのデータベースからのセキュリティ検証である。例えば、香水工場で、香水瓶の各箱を、リーダによってスキャンして、シグネチャを取得することができ、これらのシグネチャが、マスタデータベースに入力される。このマスタデータベースには、作られたすべての物品すなわち香水の箱からのシグネチャが含まれる。後に、フィールド検証のために、リーダを使用して任意の香水の箱をスキャンして、シグネチャを取得することができ、このシグネチャが、マスタデータベースと比較されて、マスタデータベース内に保持された一致するシグネチャがあるかどうかが確定される。一致がない場合には、その物品は偽造品と考えられる。一致がある場合には、その物品は本物と考えられる。
【0007】
多くの応用例、例えば、国家安全保障、市民の文書調査、または大量のブランド商品において、マスタデータベースに保管されるシグネチャの数が、非常に多くなる場合がある。エントリの個数は、おそらく、数百万個、数千万個、または数億個になり得る。例えば、この方式が、人口の多い国のパスポートまたは運転免許証の検証に使用される場合に、そのようになる。
【0008】
すべてではないにせよ、ほとんどの応用例において、マスタデータベースの検索を、穏当な時間のうちに実行できることが必要である。穏当とされるものは、応用例によって異なるが、多くの応用例について、最長の穏当な時間は、1〜2秒に過ぎないであろう。これは、物品の個数が多くなる場合に達成がむずかしくなる可能性がある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】US 5,521,984
【特許文献2】US 5,325,167
【特許文献3】GB 0405641.2
【特許文献4】US 4,564,051
【特許文献5】US 6,546,964
【特許文献6】US 4,546,964
【特許文献7】US 5,152,326
【特許文献8】US 5,358,014
【特許文献9】US 6,546,964
【特許文献10】US 2004/0011491
【特許文献11】WO 2004/020734
【非特許文献】
【0010】
【非特許文献1】Kravolec "Plastic tag makes foolproof ID" Technology Research News, 2 October 2002
【非特許文献2】R Anderson "Security Engineering: a guide to building dependable distributed systems" Wiley 2001, pages 251-252 ISBN 0-471-38922-6
【発明の概要】
【発明が解決しようとする課題】
【0011】
したがって、おそらくはデータベースを参照せずに、すべての本物の物品に一般的な特性に基づいて物品の異なる種類の検証を実行できることが望ましいはずである。これは、各物品の一意の特性に基づく決定的な検証プロセスほどセキュアではないが、実行がより簡単であり、多数の明らかな偽造または模造品を選び出す陰性試験を提供するはずである。例えば、これを、一意のシグネチャに基づく検証の前の事前スクリーニング(pre-screening)テストとして使用できるはずである。
【課題を解決するための手段】
【0012】
本出願人のレーザスペックルベースのセキュリティ技法の初期開発中に、本出願人は、同一の連からとられた2枚の紙について測定された特性信号の間のランダム一致の計算された確率が、理論から期待されるほど低くはないことを発見して驚いた。1つの特定の実験で、計算は、所与の2枚の紙のおそらくはランダムな特性シグネチャが述べられたエラー閾値以内で一致する、約1/106の可能性があることを示した。しかし、試験中に、この品質の一致は、実際には、1日あたり数回観察されつつあった。これは、特性シグネチャが、完全にランダムではなく、ある紙と次の紙との間で一定である情報の構成要素を含むことを示した。
【0013】
続く調査により、紙がアーチファクト信号を生じ、このアーチファクト信号が、紙片間のランダムで不正確な一致の機会を増加させる要因であることを明らかにした。したがって、物品の誤った識別の可能性を減らすために、本出願人の装置は、以前には、アーチファクト信号の影響を除去するように動作した。
【0014】
このアーチファクト信号自体は、紙表面がスキャンされる時に光検出器から導出される出力信号に見られる1つまたは複数の周波数成分として現れる。任意の特定のアーチファクト信号に見られる周波数成分の周期および個数は、紙表面に対してスキャンするビームの方位に依存する。
【0015】
製紙プロセスの再検討の後に、本出願人は、現在、このアーチファクト信号が、乾燥プロセス中に製紙用パルプから水を除去するのに使用されるスクリーンに由来すると考えている[6、7、8、9、10、11、12、13]。そのようなスクリーンは、通常、規則的な間隔を有するワイヤメッシュを使用して形成される。そのようなスクリーンは、通常、可視のマーキングを紙に一切残さないように設計されるが、スクリーンは、それでも、普通の製紙プロセス中に紙に重大な痕跡を付与すると思われる。本出願人は、本出願人の装置が検出できるアーチファクト信号が、スクリーンによって付与された痕跡に起因すると考えている。
【0016】
さらなる実験は、このアーチファクト信号が、しばしば、同一の連からとられた紙に共通することを明らかにした。さらに、調査は、このアーチファクト信号が、経時的に安定し、特定の1枚の紙が、しわにする、こするなどによって損傷を受けた時であっても存在するままになることを明らかにした。しかし、興味深いことに、異なる供給業者からの紙は、一般に、異なるアーチファクト信号を有することがわかっている。
【0017】
したがって、このアーチファクト信号は有用な情報を担持すると思われる。なぜなら、このアーチファクト信号が、特定のスクリーンまたはスクリーン製品タイプを使用して作られたすべての紙の特性を示すと思われるからである。さらに、非常に様々なスクリーンタイプ、材料、および形状を与えられれば、この効果は、特定の供給源からの紙すなわち、特定のスクリーンまたはスクリーンタイプを使用して作られた紙を識別するクラスシグネチャを提供するのに適切であると思われる。
【0018】
このアーチファクト信号を使用してクラスシグネチャを提供することによって、紙の製造元を識別することができる。これは、それ自体ではかなり低いレベルのセキュリティだけを提供するが、信憑性に対する陰性試験を実行するための有用な技法を提供する。なぜなら、不合格であることが、物品の一意の個々のシグネチャと関わりなく、その物品が本物であり得ないことを明瞭に示すからである。
【0019】
さらに、この技法の使用は、所定の特性シグネチャを提供するために、製造された紙の全てをスキャンする必要はないことを保証する。この技法は、これによって、そのような所定の特性シグネチャの大きいデータ集合を保管する必要を回避するか減らすことができる。さらに、クラスシグネチャを取得するために、紙を、その表面のどこをスキャンしてもよい。これは、スキャンするビームを用いてスキャンされる物品の正確な位置合せの必要を減らすのを助ける。
【0020】
したがって、本発明の第1の態様によれば、読取体積(reading volume)内に置かれた紙またはボール紙から作られた物品を分析する装置が提供される。この装置は、光ビームを用いて物品をスキャンするスキャナと、ビームが読取体積をスキャンする時に取得される信号からデータ点の集合を収集する検出器配置と、物品が物品の固有特性から既知の包括的タイプの物品を識別する所定のクラスシグネチャを有するかどうかを判定するために、データ点の集合を処理するデータ獲得および処理モジュールとを含む。データ点のうちの異なるデータ点は、スキャン中の異なる時刻に取得された信号に関連する。様々な実施形態で、ソースは、コヒーレントビームが垂直に近い入射で物品に当たるように、コヒーレントビームを読取体積に向けるように取り付けられる。様々な実施形態で、スキャナは、垂直に近い入射で物品に向けてビームを投影するように構成される。
【0021】
物品の固有特性の周期的変動が、クラスシグネチャを提供するのに使用できるアーチファクト信号を生じることができる。様々な実施形態で、クラスシグネチャは、クラスシグネチャを判定するためにデータ点の集合の数学的変換を実行することによって取得される。次に、測定されたクラスシグネチャと所定のクラスシグネチャとの間の一致は、物品が、所定のクラスシグネチャのクラスに関連する包括的タイプの物品であることを示す。様々な実施形態で、データ点の集合の1つまたは複数のフーリエ変換(FT)が、アーチファクト信号を識別するために計算される。次に、FTスペクトルまたはその1つもしくは複数のピークを、クラスシグネチャとして使用することができる。
【0022】
データ点の集合の選択された部分集合を分析することもできる。例えば、どの部分集合がデータ点の変換された集合内で最大振幅のピークを生じるかを判定するために、そのような部分集合を分析することができる。そのような部分集合には、様々な方位で物品に対して実行されたスキャンに対応するデータ点を含めることができる。例えば、ある部分集合に、回転スキャンの一部を形成する円弧上で取得されたデータ点を含めることができる。
【0023】
所定のクラスシグネチャは、リモートに置くかハンドヘルドリーダに含めることができるデータベース内で提供することができる。本装置は、クラスシグネチャを使用するので、このデータベースは、比較的小さいものとすることができる。所定のクラスシグネチャは、高められたセキュリティのために暗号化することもできる。クラスシグネチャを所定のクラスシグネチャと突き合わせることによって、この特徴を組み込んだ装置は、製造業者/機械などによる、紙/カードから作られた物品の初期セキュリティスクリーニングを提供することができる。例えば、この装置には、物品が、米国のパスポートの紙で作られていないこと、英国の銀行券の紙で作られていないことなどをオペレータに示すことができる。
【0024】
この装置には、さらに、スキャン中にビームと物品との相対位置を測定するエンコーダ/デコーダモジュールを含めることができる。データ獲得および処理モジュールは、さらに、このエンコーダ/検出器モジュールから取得される相対的に測定された位置情報を使用することによって、クラスシグネチャを判定する前に、データ点の集合を線形化するように動作可能とすることもできる。集合内の連続するデータ点がスキャン中の獲得の時刻または位置に関して等間隔であることを保証するためにデータ点の集合を変更することによって、スキャンプロセスによって導入される非線形動きアーチファクトを、十分に除去することができる。
【0025】
検出器配置に、読取体積のそれぞれの異なる部分から散乱を感知するように配置され、構成された複数の検出器チャネルを含めることができる。そのような各検出器チャネルは、それぞれのクラスシグネチャを判定するのに使用される時刻シーケンス(または、同等に、線形スキャン位置シーケンス)データの集合を供給することができる。複数のそのようなそれぞれのクラスシグネチャの平均をとって、改善された信号対雑音比を有するクラスシグネチャの測定値を提供することができる。複数の検出器が、様々な実施形態で一意の特性応答を判定するのに使用されるので、平均化機能性の組込みは、この装置のコストまたは複雑さを大きく増やすことはない。
【0026】
ある種の実施形態で、データ点のうちの異なるデータ点が、読取体積内でのビームの直線スキャンによって取得される。スキャンには、ビームと読取体積との間の相対移動が含まれる。直線スキャンの使用は、機械的に単純であり、実施が比較的安価なので、有益である。直線スキャンは、クラスシグネチャを生じる痕跡の方位が事前に決定される場合(例えば、紙が、その上でその紙が製造されるスクリーンに関して必ず特定の形で切断される場合)にも有用である。直線スキャンは、一般に、クラスシグネチャを判定する時に比較的高速である。なぜなら、生成されるデータ点の集合が、そのクラスシグネチャを抽出するために最低限の処理だけを必要とするからである。
【0027】
様々な他の実施形態について、データ点のうちの異なるデータ点が、読取体積内でのビームの回転スキャンによって取得される。これらの実施形態について、データ点の後続処理を使用してクラスシグネチャを判定できるので、クラスシグネチャを読み取る時に物品を正確に位置決めする必要はない。有利なことに、回転スキャンが、ポータブルハンドヘルドスキャナを使用して実行される場合に、そのようなスキャナを、物品のどこにでも置くことができる。したがって、このタイプのハンドヘルドスキャナは、税関吏など、物品の大きい積荷からサンプルセット物品のその場での迅速なスキャンを実行する必要がある場合がある人員に役立つ。
【0028】
本発明の様々な実施形態は、クラスシグネチャを検証するためのスキャンと、一意の特性シグネチャを検証するためのスキャンとの両方を実行するように動作可能である。特性シグネチャの検証は、条件付きでクラスシグネチャの検証に続くものとするか、必須とすることができる。
【0029】
本発明の第2の態様によれば、紙またはボール紙から作られた物品を分析する方法が提供される。この方法は、物品を読取体積内に置くことと、光ビームを用いて物品をスキャンすることと、ビームが読取体積をスキャンする時に取得される信号からデータ点の集合を収集することと、物品が物品の固有特性から既知の包括的タイプの物品を識別する所定のクラスシグネチャを有するかどうかを判定するために、データ点の集合を処理することとを含む。データ点のうちの異なるデータ点は、スキャン中の異なる時刻に取得された信号に関連する。
【0030】
本発明のこの態様による方法には、さらに、本明細書で説明する本発明の第1の態様による装置によって実施しまたは提供することができる1つまたは複数の機能/動作を実行する方法ステップを含めることができる。
【0031】
本発明の第1の態様による装置は、本発明の第2の態様による方法を実施するのに使用することができる。例えば、本発明の第1の態様による装置は、物品を分析する方法を実行することによって、物品の信憑性を検証するのに使用することができる。この装置を使用して、特定の物品が、期待されるクラスシグネチャを有するかどうかを検査することができる。例えば、香水の箱が、250×400μm間隔を有する長方形グリッドの痕跡から生じるアーチファクト信号から導出されるクラスシグネチャを有すること、または、銀行券が、300μmの平行辺間隔を有する等辺六角形グリッドの痕跡から生じるアーチファクト信号から導出されるクラスシグネチャを有することを期待することができる。複雑な形状の痕跡に由来するクラスシグネチャを使用することも可能である。例えば、クラスシグネチャは、ハート形、星形などの痕跡に由来するものとすることができる。
【0032】
さらに、この装置を使用して、所定のパターンを刻印することによって紙/ボール紙に故意にエンコードされた情報を回復することができる。そのようなパターンは、可視である必要がない。例えば、情報を、紙製造中に使用された注文仕立てのスクリーンによって紙にエンコードされたクラスシグネチャから回復することができる。
【0033】
本発明の第3の態様によれば、紙物品またはボール紙物品を製造するスクリーンが提供される。スクリーンは、紙物品またはボール紙物品を既知の包括的タイプの物品として識別する所定のクラスシグネチャを提供するために物品に注文仕立ての痕跡パターンを付与するように配置され、構成された複数の要素を含む。このスクリーンは、所定のクラスシグネチャを提供するために物品に痕跡を故意に付与するためのものである。このスクリーンは、そのパターンが製紙産業で使用されているスクリーンに現在は見られない痕跡を提供する、注文仕立てのスクリーンである。そのような注文仕立てのスクリーンは、さらに、複雑な形状の痕跡パターンを提供することができる。
【0034】
上で示したように、この態様は、所定のクラスシグネチャを提供するために物品に痕跡を故意に付与することに関連する。スクリーンは、紙またはボール紙の製造中または製造後に、その紙またはボール紙に所望の痕跡を付与する任意の手段とすることができる。例えば、スクリーンを、穴のあいた表面とすることができ、あるいは、板、ワイヤなどから構成することができる。
【0035】
普通のスクリーンには、紙またはボール紙に周期的痕跡パターンを付与するために空間的に配置された要素が含まれる。周期的パターンを使用することによって、クラスシグネチャを判定するためのスキャンを、紙のどこであっても実行することができる。そのような周期的痕跡パターンは、FTまたは他の分析技法を使用する検出に適切な強い周波数成分を有するデータ点をももたらす。
【0036】
しかし、様々な関数形式、対称性などに従う紙の表面構造の空間変調を伝えるのに刻印の効果を利用するために特別なパターン付きのスクリーンを作るという可能性もある。
【0037】
この空間変調は、例えばバイナリデータビットなどのデータをエンコードするのに使用することができる。空間変調は、例えば、chirped変調、super-periodicity変調、振幅変調、位相偏移キーイング変調、または周波数偏移キーイング変調を使用してデータをエンコードするために提供することができる。
【0038】
痕跡パターンに、複雑な形状を組み込むことができる。例えば、星、ハートなどの非対称形状、または様々な変化する度合の対称性を有する形状を組み込んで、複数の周波数成分をアーチファクト信号に与えることができる。クラスシグネチャ認識に関する複雑な複数周波数成分の使用は、コピーをよりむずかしくし、認識できる可能なクラスシグネチャの数も増やす。
【0039】
1つまたは複数のビットシーケンスを、エンコーディング用の痕跡パターンを使用することによって紙またはボール紙にエンコードすることもできる。これは、情報を紙またはボール紙に組み込む多数の可能性をもたらす。例えば、製造業者、その紙を作った機械を識別する情報、期待されるクラスシグネチャに関する暗号化された情報などを、紙自体の中にエンコードすることができる。さらに、前に示したように、この情報を、堅牢に不可視に保管することができる。
【0040】
本発明の第4の態様によれば、注文仕立ての痕跡パターンを含む紙物品またはボール紙物品を作る方法が提供される。本発明のこの態様による方法は、注文仕立ての痕跡パターンを付与するために本発明の第3の態様によるスクリーンを使用することを含む。
【0041】
本発明の第5の態様によれば、紙物品またはボール紙物品であって、既知の包括的タイプに属するものとして物品を識別するためのクラスシグネチャを提供する注文仕立ての痕跡パターンを含むことを特徴とする紙物品またはボール紙物品が提供される。痕跡パターンは、可視でないものとすることができる。例えば、痕跡パターンを、裸眼に可視でないものとすることができる。
【0042】
紙/ボール紙の注文仕立ての痕跡パターンは、周期的とすることができる。様々な実施形態で、痕跡パターンは、次の方式すなわち、chirped変調、super-periodicity変調、振幅変調、位相偏移キーイング変調、および周波数偏移キーイング変調のうちの1つまたは複数に従って提供される空間変調を組み込む。1つまたは複数のビットシーケンスを紙またはボール紙にエンコードする痕跡パターンを使用することも可能である。
【0043】
主要な実施形態を、図面に関して説明する。これらの実施形態は、クラスシグネチャを、および任意選択として一意の特性シグネチャをも検出するのに使用することができる。検出器チャネルは、特性シグネチャを検出しなければならない時には、単純なフォトトランジスタの形の離散的な検出器構成要素から構成することができる。PINダイオードまたはフォトダイオードなど、他の単純な離散的な構成要素を使用することができる。検出器アレイなどの集積された検出器構成要素を使用することもできるが、これは、デバイスのコストおよび複雑さを増加させてしまう。
【0044】
スキャンされる物品へのビームの照明角度を変更する初期の実験から、実際には、物品が測定と測定との間に劣化する場合であっても、同一表面から、ほとんど変化のないように繰り返して測定できる特性を取得するために、ビームが、スキャンされる表面にほぼ垂直に入射することが重要であるとも思われる。
【0045】
したがって、ビームが垂直に近い入射で物品に当たるようにビームを読取体積に向けるように源を取り付けることが、都合が良い。垂直に近い入射とは、±5°、±10°、または±20°を意味する。代替案では、ビームを、物品への斜めの入射を有するように向けることができる。これは、通常、ビームが物品上でスキャンされる場合に、悪影響を有する。
【0046】
また、発明を実施するための最良の形態で説明するリーダでは、検出器配置が、読取体積から後方散乱される放射を検出するために反射で配置される。しかし、物品が透明である場合には、検出器を透過で配置することができる。
【0047】
実施形態の一群で、データ獲得および処理モジュールは、所定のエンコーディングプロトコルに従う信号成分を識別するため、およびそれから所定の特性シグネチャを生成するために、データ点をさらに分析するように動作可能である。所定のエンコーディングプロトコルの特性は、ほとんどの実施形態で、コントラストすなわち散乱信号強度に基づくと考えられる。特に、普通のバーコードプロトコルを使用することができ、このバーコードは、1Dバーコードの場合にはストライプの形で、あるいは2Dバーコードの場合にはより複雑なパターンの形で、物品に印刷するか他の形で付けられる。この場合に、データ獲得および処理モジュールは、所定の特性シグネチャが、読取体積内に置かれた物品を読み取ることによって取得される特性シグネチャと一致するかどうかを確定するために比較を実行するように動作可能とすることができる。その結果、1枚の紙などの物品を、バーコードなど、それ自体の特性シグネチャのデジタル署名された版をもつようにマークすることができる。所定の特性シグネチャは、1方向関数を用いてすなわち、秘密鍵を必要とする非対称暗号化アルゴリズムを使用して、物品の特性シグネチャから取得されなければならない。これは、偽造物品を読み取り、この暗号化方式によるリーダのスキャンを表すラベルをその物品に印刷することを望む、リーダを有する権限のない第三者に対する障壁として働く。通常、バーコードラベルまたは他のマークは、公開鍵によって解読可能な暗号文を表し、秘密鍵は、権限のあるラベラ当事者のために予約されるはずである。
【0048】
所定の特性シグネチャまたはクラスシグネチャなどのシグネチャのデータベースを設けることができる。データ獲得および処理モジュールは、このデータベースにアクセスし、比較を実行して、このデータベースが読取体積に置かれた物品の特性シグネチャまたはクラスシグネチャとの一致を含むかどうかを確定するように動作可能とすることができる。このデータベースは、リーダ装置の一部を形成する大容量記憶装置の一部とすることができ、あるいは、リモート位置にあり、遠隔通信リンクを介してリーダによってアクセスされるものとすることができる。この遠隔通信リンクは、無線リンクおよび固定リンクを含む任意の普通の形をとることができ、インターネットを介して使用可能とすることができる。データ獲得および処理モジュールは、少なくともいくつかの動作モードで、一致が見つからない場合に特性シグネチャまたはクラスシグネチャをこのデータベースに追加することを可能にするように動作可能とすることができる。このファシリティは、通常、自明な理由により、権限のある人に対してのみ許可される。
【0049】
データベースを使用する時には、シグネチャを保管することに加えて、データベース内のシグネチャを、文書のスキャンされたコピー、パスポート保持者の写真、製品の製造の場所および時刻に関する詳細、または販売可能商品の所期の販売宛先に関する詳細(例えば、闇取引に近い輸入を追跡するために)などの物品に関する他の情報に関連付けることが有用である場合もある。
【0050】
上で説明したリーダ装置は、例えば生産ラインで、一連の物品を読み取ることによってデータベースに特性シグネチャを取り込むために、および/または後に、例えば現場での使用時に、物品の信憑性を検証するために使用することができる。
【0051】
本発明は、紙およびボール紙など、様々な異なる種類の全体的に凝縮された繊維質のシート材料から作られた物品の識別を可能にする。
【0052】
本発明の様々な実施形態は、物品が改ざんされたかどうかを確かめることを可能にする。これは、粘着テープなどの粘着によって接着された透明フィルムが、特性シグネチャを作成するのに使用されるスキャンされる区域をカバーする場合に、可能である。このテープを、物品を改ざんするために、例えば梱包箱を開くために、除去しなければならない場合に、除去すると下部にある表面が必ず変更されるように、粘着性の接着を選択することができる。その結果、類似するテープがその箱を再封するのに使用される場合であっても、当該除去が検出可能になる。
【0053】
紙またはボール紙は、本明細書では、木材パルププロセスを使用して作られるすべての物品を意味する。紙またはボール紙は、コーティングまたは含浸によって処理するか、セロハンなどの透明材料によってカバーすることができる。表面の長期間の安定性が特に重要である場合には、紙を、例えばアクリルのスプレー式透明コーティングによって処理することができる。
【0054】
本発明は、次の例のリストからの紙物品またはボール紙物品に特に有用と考えられる。
1.株券、銀行券、船荷証券、パスポート、政府間の条約、法律、運転免許証、車両安全証明書(vehicle roadworthiness certificate)、および実物証明書(certificate of authenticity)などの重要文書
2.例えば郵便システムの封筒など、トレースまたは追跡のためのすべての文書
3.販売可能製品のパッケージング
4.ファッション品目など、デザイナ商品のブランドラベル
5.化粧品、医薬品、または他の製品のパッケージング。
【0055】
本発明は、パッケージング、文書、および衣類を含む様々な異なるタイプの物品の識別も可能にする。物品を、パッケージングに含めることができ、任意選択として、パッケージングを、改ざんを防止する形で密封することができる。代替案では、パッケージングを、視覚的に損傷を与えずに解放することができないコネクタによって固定されたタグなど、物品への追加物とすることができる。これは、例えば、医薬製品、化粧品商品および香水、ならびに航空機あるいは陸上または水上の乗物の予備部品に特に有用である場合がある。
【0056】
要約すると、この特性シグネチャまたはクラスシグネチャは、いくつかの場合に、パッケージングなど、販売可能製品に付随するものから取得することができ、他の場合に、文書または販売可能製品の表面構造からなど、物体自体から取得することができる。本発明は、例えば、薄闇市場輸入または偽造を制御するために、多数の実用的な応用例を見出すことができる。そのような応用例において、ポータブルリーダを、税関吏または取引基準局員が使用することができる。
【0057】
特性シグネチャまたはクラスシグネチャは、ほとんどの応用例について、デジタルシグネチャとしてエンコードすることができる。現在のテクノロジを用いてデジタルエンコードされた特性シグネチャの通常のサイズは、200ビットから8kビットまでの範囲内になるはずであり、現在、高いセキュリティのために約2kビットのデジタルシグネチャサイズを有することが好ましい。クラスシグネチャは、物品識別に関してより少ないセキュリティ機構を提供するので、特性シグネチャより少数のビットを使用してエンコードすることができる。デジタルエンコードされたシグネチャ自体を、暗号化アルゴリズムを使用してエンコードすることができる。
【0058】
本発明のよりよい理解のために、および本発明を実行に移すことができる形を示すために、これから、例として添付図面を参照する。
【図面の簡単な説明】
【0059】
【図1】本発明を実施するリーダ装置を示す概略側面図である。
【図2】リーダ装置の読取体積が、それを横切って細長いビームをスキャンすることによって、どのようにn回サンプリングされるかを示す概略透視図である。
【図3】リーダ装置の機能構成要素を示すブロック概略図である。
【図4】リーダ装置の実施形態の外部の形を示す透視図である。
【図5】リーダ装置の代替実施形態を示す概略透視図である。
【図6A】指向性光コレクションおよびブランケット照明に基づく、本発明を実施するリーダの代替結像配置を概略的に示す側面図である。
【図6B】指向性検出器が細長いビームによる局所化された照明と組み合わせて使用される、本発明を実施するリーダのもう1つの代替結像配置の光学フットプリントを概略的に示す平面図である。
【図7A】エンコーダ信号を用いる線形化の後の、単一の光検出器からとられたデータ点の集合のデータを示す図である。
【図7B】図7Aに示されたデータ点の集合のFTを示す図である。
【図8A】紙がスキャン方向に関して回転される時にFTピークの振幅がどのように変化するかを示す図である。
【図8B】紙がスキャン方向に関して回転される時に最大FTピークの波長が角度に伴ってどのように変化するかを示す図である。
【図9】クラスシグネチャが、どのようにして物品から測定され、認証または記録されるかを示す流れ図である。
【図10A】光検出器信号およびエンコーダ信号からなる、図1のリーダを使用する単一の光検出器からの生データを示す図である。
【図10B】エンコーダ信号を用いる線形化および振幅の平均化の後の図10Aの光検出器データを示す図である。
【図10C】平均レベルによるデジタル化の後の図10Bのデータを示す図である。
【図11】物品の特性シグネチャがスキャンからどのように生成されるかを示す流れ図である。
【図12】スキャンから取得された物品のシグネチャをシグネチャデータベースに対してどのように検証できるかを示す流れ図である。
【図13A】紙またはボール紙から作られた物品からのクラスシグネチャを判定する回転スキャン装置で使用される回転スキャナを示す図である。
【図13B】図13Aに示された回転スキャナのハウジングにはまるリッドを示す図である。
【図14A】クラスシグネチャが、どのようにして回転スキャンを使用して物品から測定され、認証または記録されるかを一緒に示す流れ図である。
【図14B】クラスシグネチャが、どのようにして回転スキャンを使用して物品から測定され、認証または記録されるかを一緒に示す流れ図である。
【図15】本発明の実施形態による装置がどのように動作するかを示す流れ図である。
【図16A】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【図16B】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【図16C】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【図16D】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【図16E】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【図16F】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【図16G】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【発明を実施するための形態】
【0060】
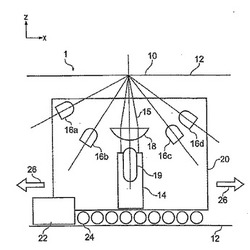
図1は、本発明を実施するリーダ装置1を示す概略側面図である。光学リーダ装置1は、この装置の読取体積内に配置された物品(図示せず)からクラスシグネチャおよび特性シグネチャを測定するためのものである。読取体積は、ハウジング12内のスリットである読取アパーチャ10によって形成される。ハウジング12には、この装置の主要な光学部品が含まれる。スリットは、x方向(図の挿入された軸を参照されたい)にその主要な範囲を有する。主要な光学部品は、コヒーレントレーザビーム15を生成するレーザ源14と、複数のk個の光検出器要素から構成される検出器配置16とであり、ここで、この例ではk=4であり、光検出器要素には、16a、16b、16c、および16dという符号が付けられている。レーザビーム15は、円柱レンズ18によって、y方向(この図の平面に垂直)に延び、読取アパーチャの平面内に横たわる細長い焦点に集光される。例の原型リーダでは、細長い焦点が、約2mmの長軸寸法および約40μmの短軸寸法を有する。これらの光学部品は、サブアセンブリ20に含まれる。図示の実施形態では、4つの検出器要素16a...dが、ビーム軸から互いに入り込んだ配置で異なる角度でオフセットしてビーム軸の両側に分散されて、読取体積内に存在する物品からの反射内で散乱された光を収集する。例の原型では、オフセット角度が、-70°、-20°、+30°、および+50°である。ビーム軸の両側の角度は、等しくならないように選択され、その結果、収集されるデータ点ができる限り独立になるようになっている。4つのすべての検出器要素が、共通の平面内に配置される。光検出器要素16a...dは、コヒーレントビームが読取体積から散乱する時に、ハウジングに置かれた物品から散乱された光を検出する。図示のように、源は、そのビーム軸をz軸内に置いてレーザビーム15を向けるように取り付けられ、その結果、ビーム軸が、読取アパーチャ内で垂直入射で物品に当たるようになっている。
【0061】
一般に、焦点深度が大きく、その結果、z方向での物品位置決めの相違が、読取アパーチャの平面でのビームのサイズの大きい変化をもたらさないことが望ましい。例の原型では、焦点深度が、約0.5mmであり、これは、よい結果を作るのに十分に大きい。焦点深度、開口数、および作動距離のパラメータは、独立であり、スポットサイズと焦点深度との間の周知のトレードオフをもたらす。
【0062】
駆動モータ22が、矢印26によって示されるように、適切なベアリング24または他の手段を介する光学サブアセンブリ20の直線スキャン移動をもたらすためにハウジング12内に配置される。したがって、駆動モータ22は、読取アパーチャ10上でx方向に直線状にコヒーレントビームを移動するように働き、その結果、ビーム15は、細長い焦点の長軸に横向きの方向でスキャンされるようになる。コヒーレントビーム15は、その焦点で、コヒーレントビームに垂直な平面内の読取体積の射影よりはるかに小さいxz平面(図の平面)すなわち読取アパーチャがセットされるハウジング壁の平面内で断面を有する寸法にされているので、駆動モータ22のスキャンは、コヒーレントビーム15に、駆動モータ22の作用の下で読取体積の多数の異なる部分をサンプリングさせる。
【0063】
図2は、スキャンによってもたらされるサンプリングを示すために含まれ、読取区域が、それを横切って細長いビームをスキャンすることによって、どのようにn回サンプリングされるかを示す概略透視図である。駆動装置の作用の下で読取アパーチャに沿ってスキャンされる時の集光されたレーザビームのサンプリング位置は、1からnまでの番号を付けられた隣接する長方形によって表され、これらの長方形は、長さ「l」および幅「w」の区域をサンプリングする。データ収集は、駆動装置がスリットに沿ってスキャンされる時に、n個の位置のそれぞれで信号を収集するために行われる。その結果、k×n個のデータ点のシーケンスが収集され、このデータ点のシーケンスは、読取体積のn個の異なる図示の部分からの散乱に関連する。したがって、各検出器kは、コヒーレントビームが読取体積をスキャンする時の異なる時刻に取得されたn個のデータ点の関連するシーケンスを有する。
【0064】
同様に概略的に図示されているが、ハウジング12の下側でスリット10に隣接してx方向すなわちスキャン方向に沿って形成された距離マーク28である。これらのマークの間のx方向の例の間隔は、300μmである。これらのマークは、細長い焦点の尾によってサンプリングされ、下でより詳細に説明するように、x方向でのデータの線形化をもたらす。測定は、追加のフォトトランジスタ19によって実行され、このフォトトランジスタ19は、スリットに隣接するマーク28の区域からの光を収集するように配置された指向性検出器である。
【0065】
代替実施形態では、マーク28は、光学サブアセンブリ20の一部である専用のエンコーダエミッタ/検出器モジュール19によって読み取られる。エンコーダエミッタ/検出器モジュールは、バーコードリーダで使用される。例えば、本発明人は、集光発光ダイオード(LED)および光検出器に基づくAgilent社のHEDS-1500モジュールを使用した。モジュール信号は、余分の検出器チャネルとしてPIC ADCに供給される。
【0066】
通常、製造プロセス中に紙に設けられる刻印された特徴は、約200μmと約600μmとの間の周期性を有する。したがって、データ点のサンプリングは、存在する可能性がある最小のありそうな刻印された特徴を検出するために、少なくとも100μmおきまたはそれ未満で行われなければならない。動作の1つのモードで、この装置は、k個の検出器のデータ点の集合を取り込むために、90μmおきに1つ程度のデータ点を取得するための迅速だが比較的粗い初期スキャンを実行することができる。次に、データ点の集合のうちの1つまたは複数を、下で説明する技法を使用して分析して、クラスシグネチャを判定することができる。クラスシグネチャとの一致が見つかる場合に、この装置は、個々の物品の一意の特性シグネチャを測定しようと努めることができる。
【0067】
その後、またはその代わりに、より微細な分解能のスキャンを行うことができる。このスキャンは、特性シグネチャまたはクラスシグネチャと特性シグネチャとの両方の測定に使用することができる。例えば、40μmの焦点という例の小さい寸法および2cmというx方向でのスキャン長を用いると、n=500であり、k=4では2000個のデータ点が与えられる。所望のセキュリティレベル、物品タイプ、検出器チャネルの個数「k」、および他の要因に依存するk×nの値の通常の範囲は、100<k×n<10000になると期待される。また、検出器の個数kを増やすことによって、ハンドリング、印刷などを介する物品の表面劣化に対する測定の鈍感さも改善されることがわかっている。実際には、これまでに使用された原型について、経験則は、非常に様々な表面で許容可能に高いセキュリティレベルを与えるために、独立のデータ点の総数すなわちk×nを500個以上にしなければならないということである。
【0068】
図3は、リーダ装置の機能構成要素のブロック概略図である。モータ22は、電気リンク23を介してプログラマブル割込みコントローラ(PIC)30に接続される。検出器モジュール16の検出器16a...dは、それぞれの電気接続線17a...dを介して、PIC 30の一部であるアナログ-デジタル変換器(ADC)に接続される。類似する電気接続線21が、マーカー読取検出器19をPIC 30に接続する。光リンクまたは無線リンクを、電気リンクの代わりにまたは電気リンクと組み合わせて使用できることを理解されたい。PIC 30は、シリアル接続32を介してパーソナルコンピュータ(PC)34に結合される。PC 34は、デスクトップ機またはラップトップ機とすることができる。PCの代替物として、例えば携帯情報端末(PDA)または専用電子ユニットなど、他のインテリジェントデバイスを使用することができる。PIC 30およびPC 34は、集合的に、検出器16a...dによって収集されたデータ点の集合から物品のシグネチャを判定するデータ獲得および処理モジュール36を形成する。PC 34は、インターフェース接続38を介してデータベース(dB)40にアクセスすることができる。データベース40は、PC 34上でメモリ内に常駐することができ、あるいは、PC 34のドライブに保管されることができる。その代わりに、データベース40を、PC 34からリモートとし、例えば携帯電話サービスまたはインターネットと組み合わされた無線ローカルエリアネットワーク(LAN)を使用して、無線通信によってアクセスすることができる。さらに、データベース40を、PC 34にローカルに保管するが、リモートソースから周期的にダウンロードすることができる。
【0069】
データベース40には、前に記録されたクラスシグネチャおよび特性シグネチャのライブラリが含まれる。この実施形態に基づく変形では、データベース40に、所定のクラスシグネチャのライブラリだけが含まれる。PC 34は、使用中に、データベース40にアクセスし、データベース40に、読取体積に置かれた物品のシグネチャとの一致が含まれるかどうかを確定するために比較を実行するようにプログラムされる。PC 34を、一致が見つからない場合にシグネチャをこのデータベースに追加することを可能にするようにプログラムすることもできる。この使用のモードは、権限のあるユーザによる使用のために予約され、検証のためにのみ現場で使用されるシステムからは省略することができる。
【0070】
図4は、リーダ装置1の外部の形を示す透視図である。ハウジング12およびスリットの形の読取アパーチャ10は明白である。物理位置決め補助器具42は、やはり明白であり、読取アパーチャ10に関する固定された位置での所与の形の物品の位置決めのために設けられる。図示の例では、物理位置決め補助器具42は、文書または梱包箱の角を置くことができる直角ブラケットの形である。これは、物品をスキャンする必要がある時に、必ず、その物品の同一部分を読取アパーチャ10内に位置決めできることを保証する。単純な角ブラケットまたは同等物が、紙、パスポート、IDカード、および梱包箱などの明確に定義された角を有する物品に十分である。
【0071】
原稿送り装置を設けて、物品配置が一貫することを保証することができる。例えば、この装置は、文書スキャナ、写真複写機、または文書管理システムの任意の普通のフォーマットに従うことができる。梱包箱について、代替案は、適切な案内穴、例えば、長方形の箱の底部を受け入れる長方形断面の穴または筒状の箱(すなわち、円筒形の箱)の底部を受け入れる円形断面の穴を設けることであるはずである。
【0072】
物理位置決め補助器具42は、リーダ装置1が、クラスシグネチャと特性シグネチャとの両方を検査する場合に設けられる。しかし、この特徴またはその機能的同等物は、クラスシグネチャに関する検査を実行するのみであるリーダ装置1の変形例においては、存在する必要がない。
【0073】
図5は、物品の群をスクリーニングすることを意図されたリーダ装置1'を示す代替実施形態の概略透視図である。このリーダは、その上にパッケージングの物品を置くことができるコンベヤベルト44に基づくが、表現を単純にするために1つの物品5だけが図示されている。物品5上の読取区域10'が、物品5がコンベヤベルト44上で通過する時に、静止レーザビーム15によってスキャンされる。レーザビーム15は、コンベヤベルト44の横の定位置に固定されて配置されたレーザ源14によって生成される。レーザ源14は、高さ「h」でコンベヤベルト44の上を通過し、これによって高さ「h」で物品5と交差して読取区域10'上をスキャンするためにz方向で(すなわち、床に水平に)移動する鉛筆様のほぼ平行のビームを作るために一体のビーム収束レンズ(図示せず)を有する。ビーム断面は、スポットすなわち円形(例えば、一体の球面レンズを用いて作られる)またはy方向に延びる直線(例えば、一体の円柱レンズを用いて作られる)とすることができる。1つの物品だけが図示されているが、類似する物品のストリームを運び、これらがビーム15を通過する際に連続してスキャンできることを諒解されたい。
【0074】
コンベヤベースのリーダ装置の機能構成要素は、さらに上で説明した独立型リーダ装置の機能構成要素に似ている。実質の唯一の相違は、スキャンビームと物品との間の所望の相対的な動きを生成するために、レーザビームではなく物品が移動されることである。
【0075】
コンベヤベースのリーダを、一連の物品を読み取ることによって、データベースにクラスシグネチャ/特性を表すシグネチャを取り込むために生産ライン環境または倉庫環境で使用できると考えられる。制御として、各物品をもう一度スキャンして、記録されたシグネチャを検証できることを検証することができる。これは、直列で動作する2つのシステムを用いて、または各物品が2回通過する1つのシステムを用いて行うことができる。バッチスキャンを、販売時点(POS)で、またはPOS機器構成要素に基づくリーダ装置を使用して適用することもできる。
【0076】
上で説明した実施形態は、励起の局所的区域を含むはるかに大きい区域に亘って散乱された光信号を受け入れる検出器と組み合わされた、小さい断面のコヒーレント光ビームを有する局所化された励起に基づく。その代わりに、はるかに大きい区域の励起と組み合わされた、局所化された区域からのみ光を収集する指向性検出器に基づく、機能的に同等の光学系を設計することが可能である。
【0077】
図6Aに、指向性光コレクション(directional light collection)およびコヒーレントビームによるブランケット照明に基づく、本発明を実施するリーダのそのような結像配置を側面図で概略的に示す。アレイ検出器48が、円柱マイクロレンズアレイ46と組み合わせて配置され、その結果、検出器アレイ48の隣接するストリップは、読取体積内の対応する隣接するストリップからの光だけを収集するようになっている。図2を参照すると、各円柱マイクロレンズは、n個のサンプリングストリップのうちの1つから光信号を収集するように配置される。次に、コヒーレント照明を、読取体積全体(この図には図示せず)のブランケット照明を用いて行うことができる。
【0078】
局所化された励起と局所化された検出との組合せを用いるハイブリッドシステムも、いくつかの事例で有用である場合がある。
【0079】
図6Bに、指向性検出器が細長いビームによる局所化された照明と組み合わせて使用される、本発明を実施するリーダのそのようなハイブリッド結像配置の光学フットプリントを平面図で概略的に示す。この実施形態は、指向性検出器が設けられる、図1の実施形態の発展形と考えることができる。この実施形態では、指向性検出器の3つのバンクが設けられ、各バンクは、「l×w」励起ストリップに沿った異なる部分からの光を収集するように向けられている。読取体積の平面からの収集区域は、破線の円によって示されており、その結果、例えば2つの、検出器の第1バンクが、励起ストリップの上側部分からの光信号を収集し、検出器の第2バンクが、励起ストリップの中央部分からの光信号を収集し、検出器の第3バンクが、励起ストリップの下側部分からの光を収集するようになっている。検出器の各バンクは、約l/mの直径の円形の収集区域を有するものとして図示されており、ここで、mは、励起ストリップの副分割の個数であり、現在の例ではm=3である。この形で、独立のデータ点の個数を、所与のスキャン長lについてm倍だけ増やすことができる。下でさらに説明するように、指向性検出器の異なるバンクのうちの1つまたは複数を、スペックルパターンをサンプリングする光信号の収集以外の目的に使用することができる。例えば、バンクのうちの1つを、バーコードスキャンに最適化された形で光信号を収集するのに使用することができる。そうである場合に、そのバンクに1つの検出器だけを含めることが、一般に十分である。なぜなら、コントラストについてスキャンするだけの時に、相互相関を取得することに利点がないからである。
【0080】
ここで、本発明を実行するのに適切な様々なリーダ装置の主要な構造的構成要素および機能的構成要素を説明し終えたので、クラスシグネチャおよび特性シグネチャを判定するのに使用される数値処理を、これから説明する。この数値処理が、大部分は、PC 34で動作するコンピュータプログラムで実施され、いくつかの要素がPIC 30に従属することを理解されたい。
【0081】
図7Aに、エンコーダ信号を用いる線形化の後の、図1のリーダの単一の光検出器16a...dからとられたデータ点の集合のデータを示す。x軸の点番号は、読取体積内に置かれ、コヒーレントビームによってスキャンされた標準A4の紙からサンプリングされたデータ点に対応する。
【0082】
図7Bに、図7Aに示されたデータ点の線形化された集合のFTを示す。
【0083】
図7Aのデータ点は、十分にランダムであるように見えるが、図7Bでは、422μmの波長に強いピークがあることがわかる。本発明人は、紙の表面の異なる場所で、および同一連からとられた異なる紙について、同一のクラスシグネチャを導出した。異なる製造業者の紙を使用する類似するスキャンおよびFTは、287μmのピーク波長を生じ、これは、異なるメッシュ上で作られた紙の間で区別できるクラスシグネチャをもたらすのに、ピーク波長をどのように使用できるかを示す。
【0084】
FTピークの波長は、紙がコヒーレントビームスキャン方向に関して向けられている方向に依存することがわかっている。例えば、第1の紙は、「ポートレート」方位でスキャンされる時に422μmのピーク波長を生じ、「ランドスケープ」方位でスキャンされる時に274μmのピーク波長を生じた。さらに、紙の片面は、しばしば、他方の面より強いFTピークを与える。本発明人は、これが、紙の製造中にメッシュと接触していた紙の面に生じる、より強い表面コルゲーションに起因すると考える。
【0085】
本発明人は、紙に対する自然劣化、意図的な劣化、および損傷が、クラスシグネチャを変化させ、または読取不能にするかどうかを調べるために、紙に対して堅牢性テストを実行した。特に、本発明人は、紙をしわにし、その表面を強くこすった。強い変化は、クラスシグネチャでは見られなかったが、より多くの雑音が、スペクトルの下側周波数端に現れた。また、本発明人は、紙を、医療用オートクレーブで高圧蒸気にさらした。FTピークは、それでも、オートクレーブの後に明瞭に可視であったが、その波長は、426μmから418μmに1.7%だけ減少することがわかった。本発明人は、これを、蒸気からの乾燥時の紙繊維の縮小に起因すると考える。紙の視覚的検査は、紙がオートクレーブで強く劣化したことを示した。しかし、この損傷の度合は、通常の応用例については想定されない。
【0086】
図8Aに、紙がスキャン方向に関して90°回転される時にFTピークの振幅がどのように変化するかを示す。紙のくぼみは、寸法408μm×274μmの長方形グリッドを形成すると考えられる。0°では、ビームスキャン方向が、408μmの周期的な間隔のグリッドくぼみに垂直である。強い信号が、約0°、45°、および90°に現れる。90°の信号は、スキャン方向が、274μmの周期的な間隔のグリッドくぼみに垂直である時に生じる。
【0087】
図8Bに、紙がスキャン方向に関して回転される時に最大FTピークの波長が角度に伴ってどのように変化するかを示す。最大FTピークの波長は、角度が0°から約10°まで回転される時に、約408μmでほとんど一定である。本発明人は、クラスシグネチャに対応するFTのピークが、スキャンレーザ方向が製造メッシュに由来する表面リップルの長軸から約±10°以内である時に、最もよく検出されることを見つけた。これは、細長いレーザスポット(約2mm長)の投影が、回転角が約10°を超えたならば、リップルの間の間隔に匹敵するようになるからである。
【0088】
図9は、クラスシグネチャが、どのようにして物品から測定され、認証または記録されるかを示す流れ図である。
【0089】
ステップA1は、スキャンモータが始動される最初のステップである。スキャンモータは、速度vで移動するようにプログラムされる。
【0090】
ステップA2は、光検出器のそれぞれでの光強度が、スキャンの全長中に約1msおきに獲得される、データ獲得ステップである。サンプル点の間の時間間隔は、Δtである。同時に、エンコーダ信号が、時間の関数として獲得される。スキャンモータが、高い度合の線形化精度を有する(例えば、ステッパモータのように)場合に、エンコーダ信号を獲得する必要がないことに留意されたい。データは、PIC 30がADC 31からデータをとることによって獲得される。データ点は、リアルタイムでPIC 30からPC 34に転送される。代替案では、データ点を、PIC 30内のメモリに保管し、その後、スキャンの終りにPC 34に渡すことができる。各スキャンで収集される検出器チャネルあたりのデータ点の個数nは、次ではNと定義される。さらに、値ak(i)は、光検出器kからのi番目に保管された強度値と定義され、iは、1からNまで変化する。そのようなスキャンから取得された2つの生データ集合の例を、図10Aに示す。
【0091】
ステップA3は、スキャンヘッドを戻すステップである。スキャンモータを逆転して、後続のスキャン動作に備えてスキャン機構をその初期位置にリセットする。
【0092】
ステップA4は、任意選択の線形化ステップである。実行される場合に、このステップは、局所的に延ばされ、縮められたak(i)に数値補間を適用し、その結果、エンコーダ遷移が時間的に等間隔になるようにする。これによって、モータ速度の局所的変動についてデータ点の集合が訂正される。このステップは、PC 34内で、コンピュータプログラム制御の下で実行される。
【0093】
ステップA5は、ak(i)のフーリエ変換のFT振幅スペクトルAk(i)が計算されるFTステップである。このステップは、データ点のk個の集合の個々への高速フーリエ変換(FFT)の適用によって、PC 34内でコンピュータプログラム制御の下で実行される。任意選択として、平均をとられたFT振幅スペクトルを、k個の個々の振幅スペクトルのそれぞれから計算することができる。
【0094】
ステップA6は、i=0(直流成分)を除いて、Ak(i)を最大にするiの値を識別する識別ステップである。このインデックスipeakは、PC 34内でコンピュータプログラム制御の下で識別される。
【0095】
ステップA7は、ipeakに関連する波長が、式λpeak=2π/(ipeak×vΔt)に従ってPC 34内で判定される、計算ステップである。このピーク波長λpeakは、その後、クラスシグネチャとして使用される。
【0096】
ステップA8は、判断点である。物品が、そのクラスシグネチャを記録されることになる場合には、次のステップは、ステップA9になる。ところが、物品が、そのクラスシグネチャの測定によって認証されることになる場合には、次のステップは、ステップA10になる。PC 34は、どちらのステップがステップA8に続くかを判定するようにプログラムされる。
【0097】
ステップA9は、クラスシグネチャを保管するステップである。紙の記述に関連するクラスシグネチャ値λpeakを含むレコードが、PC 34によってデータベース40に保管される。データベース40を、光学リーダ装置1からリモートに置くことができ、レコードを、その間の伝送の前にセキュアに暗号化することができる。
【0098】
ステップA10は、クラスシグネチャを検証するステップである。PC 34は、事前定義の誤差マージン内の一致が見つかるまで、λpeakをデータベース40内のすべてのエントリと比較する。次に、PC 34は、一致する紙タイプが見つかる場合に、その紙タイプのレコードエントリ記述を表示する。一致するエントリが見つからない場合には、PC 34は、任意選択として、検索を他のデータベースに拡張しようと努めることができる。任意選択として、一致が使用可能でないことを述べるメッセージを、表示することができる。任意選択として、クラス一致が見つかるか否かに関わりなく、PC 34は、その後、物品を一意に識別することを試みるために、物品からの特性シグネチャが所定の特性シグネチャと一致するかどうかを判定するために分析を実行しようと努めることができる。
【0099】
図10Aに、図1のリーダの光検出器16a...dのうちの単一の光検出器からの生データを示す。このグラフは、点番号n(図2を参照されたい)に対して任意の単位(a.u.)での信号強度Iをプロットしたものである。I=0とI=250との間で変動する、より高いトレースは、光検出器16aからの生信号データである。より低いトレースは、I=50付近にある、マーカー28(図2を参照されたい)から獲得されたエンコーダ信号である。
【0100】
図10Bに、エンコーダ信号を用いる線形化の後の図10Aの光検出器データを示す。さらに、強度の平均が、計算され、強度値から減算されている。したがって、処理済みのデータ値は、0の上下で変動する。
【0101】
図10Cに、特性シグネチャを提供するためのデジタル化の後の図10Bのデータを示す。採用されたデジタル化方式は、すべての正の強度値が値1にセットされ、すべての負の強度値が0にセットされる、シンプルバイナリワン(simple binary one)である。その代わりに、マルチステートデジタル化または多数の他の可能なデジタル化手法のうちのいずれか1つを使用できることを諒解されたい。デジタル化の主な重要な特徴は、単に、同一のデジタル化方式が一貫して適用されることである。
【0102】
図11は、物品の特性シグネチャがスキャンからどのように生成されるかを示す流れ図である。
【0103】
ステップS1は、光検出器のそれぞれでの光強度が、スキャンの全長中に約1msおきに獲得される、データ獲得ステップである。同時に、エンコーダ信号が、時間の関数として獲得される。スキャンモータが、高い度合の線形化精度を有する(例えば、ステッパモータのように)場合に、データの線形化が必要でない場合があることに留意されたい。データは、PIC 30がADC 31からデータをとることによって獲得される。データ点は、リアルタイムでPIC 30からPC 34に転送される。代替案では、データ点を、PIC 30内のメモリに保管し、その後、スキャンの終りにPC 34に渡すことができる。各スキャンで収集される検出器チャネルあたりのデータ点の個数nは、次ではNと定義される。さらに、値ak(i)は、光検出器kからのi番目に保管された強度値と定義され、iは、1からNまで変化する。そのようなスキャンから取得された2つの生データ集合の例を、図10Aに示す。
【0104】
ステップS2では、数値補間を使用してak(i)を局所的に延長かつ縮約し、その結果、エンコーダ遷移が時間的に等間隔になるようにする。これは、モータ速度の局所的変動について訂正する。このステップは、PC 34内で、コンピュータプログラムによって実行される。
【0105】
ステップS3は、任意選択ステップである。実行される場合に、このステップは、時間に関してデータを数値微分する。弱い平滑化関数をデータに適用することが望ましい場合もある。微分は、非常に構造化された表面に有用である場合がある。なぜなら、微分が、相関する(スペックル)寄与に対して、信号からの相関しない寄与を減衰させるように働くからである。
【0106】
ステップS4は、光検出器ごとに、記録された信号の平均値が、N個のデータ点にまたがってとられるステップである。この平均値は、前に言及したアーチファクト信号に対応する。光検出器ごとに、この平均値をすべてのデータ点から減算し、その結果、データが、0強度の回りに分散するようにする。線形化および計算された平均値の減算の後のスキャンデータ集合の例を示す図10Bを参照する。
【0107】
ステップS5では、アナログ光検出器データをデジタル化して、スキャンを表すデジタルシグネチャを計算する。デジタルシグネチャは、次のルールを適用することによって取得される:ak(i)>0は、バイナリ「1」に写像され、ak(i)<=0は、バイナリ「0」に写像される。デジタル化されたデータ集合は、dk(i)と定義され、ここで、iは1からNまで変化する。物品のシグネチャは、有利なことに、説明したばかりの強度データのデジタル化されたシグネチャに加えて、さらなる成分を組み込むことができる。このさらなる任意選択のシグネチャ成分を、これから説明する。
【0108】
ステップS6は、より小さい「サムネイル」デジタルシグネチャが作成される、任意選択ステップである。これは、m個の読みの隣接するグループの平均を一緒にとることによって、または、より好ましくはc個おきのデータ点を選択することによってのいずれかで行われ、ここで、cは、サムネイルの圧縮係数である。後者は、平均化が、不均衡に雑音を増幅する場合があるので好ましい。その後、ステップS5で使用されたものと同一のデジタル化ルールが、縮小されたデータ集合に適用される。サムネイルデジタル化は、tk(i)と定義され、ここで、iは、1〜N/cまで変化し、cは、圧縮係数である。
【0109】
ステップS7は、複数の検出器チャネルが存在する時に適用可能な任意選択ステップである。追加の成分は、光検出器のうちの異なる光検出器から取得された強度データの間で計算される相互相関成分である。2チャネルがある場合に、1つの可能な相互相関係数があり、3チャネルの場合には3つまで、4チャネルの場合には6つまでなどの相互相関係数がある。相互相関係数は、材料タイプのよいインジケータであることがわかっているので、有用である。したがって、相互相関係数を使用して、クラスシグネチャの分析から導出される情報を補強することができる。例えば、所与のタイプのパスポートなどの特定のタイプの文書またはレーザプリンタ用紙について、相互相関係数は、必ず予測可能な範囲内にあると思われる。正規化された相互相関を、ak(i)とal(i)との間で計算することができ、ここで、k≠lであり、kおよびlは、光検出器チャネル番号のすべてにまたがって変化する。正規化された相互相関関数Γは
【0110】
【数1】

【0111】
と定義される。特性シグネチャの検証処理での相互相関関数の使用は、下でさらに説明する。
【0112】
ステップS8は、信号強度分布を示す単純な強度平均値を計算するためのもう1つの任意選択ステップである。これは、異なる検出器の平均値のそれぞれの全体的な平均値、または、ak(i)の二乗平均平方根(rms)値などの、検出器ごとの平均値とすることができる。検出器が、上で説明したリーダのように垂直入射の両側で対に配置されている場合に、検出器の対ごとの平均値を使用することができる。強度値は、サンプルの全体的な反射率および粗さを単純に示すので、材料タイプに関するよい粗フィルタであることがわかっている。例えば、強度値として、平均値すなわち直流バックグラウンドの除去の後の正規化されていないrms値を使用することができる。
【0113】
物品のスキャンから取得されたシグネチャデータは、検証のためにシグネチャデータベースに保持されたレコードと比較することができ、かつ/または、既存データベースを拡張するためにシグネチャの新しいレコードを追加するためにデータベースに書き込むことができる。
【0114】
新しいデータベースレコードには、ステップS5で取得されるデジタルシグネチャならびに、任意選択として、光検出器チャネルごとにステップS6で取得される、そのより小さいサムネイル版、ステップS7で取得される相互相関係数、およびステップS8で取得される1つまたは複数の平均値が含まれる。代替案では、サムネイルを、迅速な検索のために最適化されたそれ自体の別々のデータベースに保管することができ、残りのデータ(サムネイルを含む)を主データベースに保管することができる。
【0115】
図12は、スキャンから取得された物品の特性シグネチャを所定の特性シグネチャデータベースに対してどのように検証できるかを示す流れ図である。
【0116】
単純な実施態様では、データベースを単純に検索して、特性シグネチャデータの集合全体に基づいて一致を見つけることができる。しかし、検証プロセスを高速化するために、このプロセスは、これから説明するように、より小さいサムネイルと、計算された平均値および相互相関係数に基づく事前スクリーニングとを使用することが好ましい。
【0117】
検証ステップV1は、検証プロセスの第1ステップであり、上で説明したプロセスに従って物品をスキャンすることすなわちスキャンステップS1からS8までを実行することである。
【0118】
検証ステップV2では、サムネイルエントリのそれぞれをとり、これとtk(i+j)との間の一致するビットの数を評価する。ここで、jは、スキャンされた区域の配置の誤差について補償するために変更されるビットオフセットである。jの値が、判定され、その後、一致するビットの最大個数を与えるサムネイルエントリが判定される。これが、さらなる処理に使用される「ヒット」である。
【0119】
検証ステップV3は、レコードについて保管された完全なデジタルシグネチャをスキャンされたデジタルシグネチャに対して分析する前に実行される、任意選択の事前スクリーニングテストである。この事前スクリーニングでは、スキャンステップS8で取得されたrms値を、ヒットのデータベースレコード内の対応する保管された値と比較する。「ヒット」は、それぞれの平均値が事前定義の範囲内で一致しない場合に、さらなる処理から外される。その場合に、物品は、検証されないものとして拒絶される(すなわち、検証ステップV6にジャンプし、失敗の結果を発行する)。
【0120】
検証ステップV4は、完全なデジタルシグネチャを分析する前に実行される、もう1つの任意選択の事前スクリーニングテストである。この事前スクリーニングでは、スキャンステップS7で取得された相互相関係数が、ヒットのデータベースレコード内の対応する保管された値と比較される。「ヒット」は、それぞれの相互相関係数が事前定義の範囲内で一致しない場合に、さらなる処理から外される。その場合に、物品は、検証されないものとして拒絶される(すなわち、検証ステップV6にジャンプし、失敗の結果を発行する)。任意選択として、事前スクリーニングを、物品のクラスシグネチャの結果に基づくものとすることができる。
【0121】
検証ステップV5は、スキャンステップS5で取得されるスキャンされたデジタルシグネチャと、ヒットのデータベースレコード内の対応する保管された値との間の主比較である。完全な保管されたデジタル化されたシグネチャdkdb(i)が、k個の検出器チャネル上のq個の隣接するビットのn個のブロックに分割される、すなわち、1ブロックあたりqk個のビットがある。qの通常の値は、4であり、kの通常の値は、4であり、通常は1ブロックあたり16ビットになる。次に、qk個のビットが、保管されたデジタルシグネチャdkdb(i+j)内のqk個の対応するビットと突き合わされる。このブロック内の一致するビットの個数が、ある事前定義の閾値zthresh以上である場合に、一致するブロックの個数を増分する。zthreshの通常の値は、13である。これを、n個のすべてのブロックについて繰り返す。一致するブロックの最大個数が見つかるまで、このプロセス全体を、jの異なるオフセット値について繰り返して、スキャンされた区域の配置の誤差について補償する。Mを一致するブロックの最大個数と定義すると、偶然の一致の確率は、
【0122】
【数2】
【0123】
を評価することによって計算される。ここで、sは、任意の2つのブロックの間の偶然の一致の確率であり(zthresholdの選択された値に依存する)、Mは、一致するブロックの個数であり、p(M)は、M個以上のブロックが偶然に一致する確率である。sの値は、例えば紙文書の複数のスキャンなど、類似する材料の異なる物体のスキャンからのデータベース内のブロックを比較することによって決定される。q=4、k=4、およびzthreshold=13の場合に、本発明人は、sの通常の値が0.1であることを見つける。qk個のビットが、完全に独立である場合に、確率理論は、zthreshold=13についてs=0.01を与えるはずである。本発明人が経験的により大きい値を見つけたという事実は、k個の検出器チャネルの間の相関と、有限のレーザスポット幅に起因するブロック内の隣接ビット間の相関とのゆえである。1枚の紙の通常のスキャンは、その紙のデータベースエントリと比較された時に、合計510個のブロックのうちの約314個の一致するブロックを生じる。上の式についてM=314、n=510、およびs=0.1をセットすることによって、10-177という偶然の一致の確率が与えられる。
【0124】
検証ステップV6は、この検証プロセスの結果を発行する。検証ステップV5で取得された確率結果を合否テストで使用することができ、この合否テストでは、基準点が、事前定義の確率閾値である。この場合に、確率閾値は、システムによってあるレベルにセットされるものとすることができ、あるいは、ユーザによって選択されたレベルにセットされた変数パラメータとすることができる。代替案では、確率結果を、確率自体としての生の形で、または関連する用語(例えば、一致なし/悪い一致/よい一致/優秀な一致)もしくは他の分類を使用する変更された形のいずれかで、信頼水準としてユーザに出力することができる。
【0125】
多数の変形が可能であることを諒解されたい。例えば、事前スクリーニング構成要素として相互相関係数を扱うのではなく、相互相関係数を、デジタル化された強度データと一緒に、主シグネチャの一部として扱うことができる。例えば、相互相関係数/クラスシグネチャを、デジタル化し、デジタル化された強度データに追加することができる。相互相関係数/クラスシグネチャを、それ自体でデジタル化し、ビットストリングまたは類似物を生成するのに使用することもでき、次に、このビットストリングまたは類似物を、ヒットを見つけるために、デジタル化された強度データのサムネイルについて上で説明したものと同一の形で検索することができる。
【0126】
上の例は、物品が1方向でのみスキャンされる直線スキャナに関連した。そのようなスキャナでは、物品、または、より具体的には痕跡パターンが、制御され再生可能な形で位置合せされる必要がある。すべての可能な方向をスキャンすることによってこの制限を克服する回転スキャナを、これから説明する。
【0127】
図13Aに、紙またはボール紙から作られた物品からのクラスシグネチャを判定する回転スキャン装置で使用される回転スキャナ100を示す。スキャナ100には、ハウジング110に回転可能に取り付けられたスキャンヘッド102が含まれる。スキャンヘッド102は、位置エンコーダモジュール106に隣接する回転する腕104に取り付けられる。この回転する腕は、駆動モータ108に動作可能に結合される。
【0128】
図13Bに、図13Aに示された回転スキャナ100のハウジング110にはまるリッド120を示す。リッド120には、円弧状のスロット124をその中に画定された平らな面部分122が含まれる。円弧状のスロット124は、360°から角度126を引いた角度に対する。この実施形態では、円弧状のスロット124は、270°の角度に対する。これは、スキャンヘッド102が、円弧の約270°にわたってスキャンし、したがって、紙のすべての可能な方位をサンプリングすることを可能にする。
【0129】
図13Aおよび13Bに示された回転スキャン装置は、前に説明した直線スキャン装置に似たスキャンシステムに組み込むことができる。この場合に、直線スキャン装置感知システムは、図13Aおよび図13Bの回転版に置換され、データ処理装置は、図14に関して下で説明する方法を実施するように再プログラムされる。
【0130】
この実施形態の2つの主要な利点がある。第1に、紙とスキャナとの相対方位を知る必要がない。なぜなら、スペクトルの観察された集合と紙タイプのデータベースとの間のあてはめを、一致が取得されるまで、異なる開始角度について行うことができるからである。これは、スキャナを、紙表面上のどこにでも降ろすことができ、クラスシグネチャを報告できることを意味する。第2に、より高いレベルのセキュリティが実現される。なぜなら、クラスシグネチャを、異なるスキャン方向からとられる特徴の組合せから構成することができるからである。例えば、クラスシグネチャを形成するデータ点の変換された集合を使用して、長方形メッシュ構造の2つの別個の周期性を見分けることができる。もう1つの例は、所与の周期性の六角形メッシュを識別し、これを同一周期性の正方形メッシュから区別するなど、メッシュの回転対称性の次数を判定することであるはずである。
【0131】
図14Aおよび14Bに、一緒に、クラスシグネチャが、どのようにして回転スキャンを使用して物品から測定され、認証または記録されるかを示す流れ図を示す。
【0132】
ステップR1は、スキャンモータが始動される最初のステップである。スキャンモータは、速度vで移動するようにプログラムされる。
【0133】
ステップR2は、光検出器のそれぞれでの光強度が、スキャンの全長中に約1msおきに獲得される、データ獲得ステップである。サンプル点の間の時間間隔は、Δtである。同時に、エンコーダ信号が、時間の関数として獲得される。スキャンモータが、高い度合の線形化精度を有する(例えば、ステッパモータのように)場合に、エンコーダ信号を獲得する必要がないことに留意されたい。エンコーダ信号は、位置エンコーダモジュール106がスロット124に隣接するリッド120に設けられたマーキングを通る時を検出することによって供給することができる。データは、PIC 30がADC 31からデータをとることによって獲得される。データ点は、リアルタイムでPIC 30からPC 34に転送される。代替案では、データ点を、PIC 30内のメモリに保管し、その後、スキャンの終りにPC 34に渡すことができる。各スキャンで収集される検出器チャネルあたりのデータ点の個数nは、次ではNと定義される。さらに、値ak(i)は、光検出器kからのi番目に保管された強度値と定義され、iは、1からNまで変化する。
【0134】
ステップR3は、スキャンヘッドを戻すステップである。スキャンモータを逆転して、後続のスキャン動作に備えてスキャン機構をその初期位置にリセットする。
【0135】
ステップR4は、任意選択の線形化ステップである。実行される場合に、このステップは、局所的に延ばされ、縮められたak(i)に数値補間を適用し、その結果、エンコーダ遷移が時間的に等間隔になるようにする。これによって、モータ速度の局所的変動についてデータ点の集合が訂正される。このステップは、PC 34内で、コンピュータプログラム制御の下で実行される。
【0136】
ステップR5は、i0に0をセットする初期化ステップである。
【0137】
ステップR6は、データ点の部分集合がスキャン全体から作成されるステップである。I=i0-ΔIからi0+ΔIまで変化するak(i)の部分集合bk(i)が作成される。上で図8Bに関して示したように、ΔIは、スキャナの円弧の約10°に対応しなければならない。
【0138】
ステップR7は、bk(i)のフーリエ変換のFT振幅スペクトルBk(i)が計算されるFTステップである。このステップは、データ点のk個の集合の個々への高速フーリエ変換(FFT)の適用によって、PC 34内でコンピュータプログラム制御の下で実行される。任意選択として、複数の検出器がスキャンヘッド102内に設けられる場合に、平均をとられたFT振幅スペクトルを、k個の個々の振幅スペクトルのそれぞれから計算することができる。各変換に使用されるデータのより短いシーケンスのゆえに、FTピークは、直線スキャンのFTピークより幅広く、より強度が小さい。それでも、ある種の条件の下で、スペクトルの集合は、紙のよいクラスシグネチャを形成する。
【0139】
ステップR8は、i=0(直流成分)を除いて、Bk(i)を最大にするiの値を識別する識別ステップである。このインデックスipeakは、PC 34内でコンピュータプログラム制御の下で識別される。
【0140】
ステップR9は、Bk(i)の二乗平均平方根(r.m.s.)値が判定されるステップである。
【0141】
【数3】
【0142】
を使用してBk(i)のr.m.s.値を計算する。所与の角度スキャンφについて、振幅スペクトル内の最大ピーク高を見つけ、これを振幅スペクトルのr.m.s.値によって除算する。この比を、ピーク重み(peak significance)と呼ぶ。なぜなら、この比が、ピークがスペクトルの残りよりどれほど大きいかを示すからである。約3から4未満のピーク重みは、明瞭に画定されたピークがないことを意味する。約4を超えるピーク重みは、明確に画定されたピークを示す。ピーク重みが約3から4を超える場合には、ピークの中央の波長を測定する。ピーク重みが約3から4未満である場合には、そのデータを破棄し、φの次の値に進む。したがって、φに対するピーク波長の、円弧のうちで明確に画定されたピークが存在する部分に限定されたグラフをプロットすることができる。このプロットは、そのスキャンされた紙のクラスシグネチャを形成する。
【0143】
図8Aに、1枚の紙からの実際の測定に関する、振幅スペクトルのr.m.s.値に対する振幅スペクトルの最大ピークの振幅の比を示す。明らかに重要なピークを、0°から15°までの角度範囲内に見ることができ、より弱いピークが、約45°および約90°に現れている。0°に近い最大ピークに焦点を合わせて、図8Bに、角度の関数としてのこのピークの波長を示す。408μmというほぼ一定の波長が見つかり、これが、この1枚の紙のクラスシグネチャを形成する。図8Bで見ることができる、角度に対する波長の依存性でのわずかに上向きの曲率は、スキャン方向が変換する時の波長のl/cos(角度)投影に起因する。
【0144】
ステップR10は、比判定ステップである。比B(ipeak/rms)を計算し、保管する。
【0145】
ステップR11は、i0を増分する増分ステップである。
【0146】
ステップR12は、i0=NになるまでステップR6をもう一度実行させる、ループテストステップである。i0=Nの場合には、ステップR13が実行される。
【0147】
ステップR13は、比B(ipeak/rms)を最大にするi0の値ipeakを判定する、大域ピークデータ点判定ステップである。
【0148】
ステップR14は、ipeakに関連する波長が、PC 34内で式λpeak=2π/(ipeak×vΔt)に従って判定される、計算ステップである。ピーク波長λpeakは、その後、クラスシグネチャとして使用される。
【0149】
ステップR15は、判断点である。物品が、そのクラスシグネチャを記録されることになる場合には、次のステップは、ステップR16になる。ところが、物品が、そのクラスシグネチャの測定によって認証されることになる場合には、次のステップは、ステップR17になる。PC 34は、どちらのステップがステップR15に続くかを判定するようにプログラムされる。
【0150】
ステップR16は、クラスシグネチャを保管するステップである。紙の記述に関連するクラスシグネチャ値λpeakを含むレコードが、PC 34によってデータベース40に保管される。データベース40を、光学リーダ装置1からリモートに置くことができ、レコードを、その間の伝送の前にセキュアに暗号化することができる。
【0151】
ステップR17は、クラスシグネチャを検証するステップである。PC 34は、事前定義の誤差マージン内の一致が見つかるまで、λpeakをデータベース40内のすべてのエントリと比較する。次に、PC 34は、一致する紙タイプが見つかる場合に、その紙タイプのレコードエントリ記述を表示する。一致するエントリが見つからない場合には、PC 34は、任意選択として、検索を他のデータベースに拡張しようと努めることができる。任意選択として、一致が使用可能でないことを述べるメッセージを、表示することができる。任意選択として、クラス一致が見つかるか否かに関わりなく、PC 34は、その後、物品を一意に識別することを試みるために、物品からの特性シグネチャが所定の特性シグネチャと一致するかどうかを判定するために分析を実行しようと努めることができる。
【0152】
図15は、本発明の実施形態による装置がどのように動作するかを示す流れ図である。
【0153】
ステップA1は、このプロセスの開始である。このプロセスは、PC 34の制御の下にある。
【0154】
ステップA2は、分析される物品を読取体積内に位置決めするステップである。このステップは、手動でまたは自動的に実行することができる。例えば、シートフィーダーを使用して、紙/ボール紙物品を装置読取体積内に位置決めすることができ、あるいは、ハンドヘルドスキャナを物品に置くことができる。
【0155】
ステップA3は、物品をスキャンするステップである。一実施形態で、これには、直線スキャンを使用して物品に関してビームを移動することが用いられる。しかし、本明細書で説明したタイプの回転スキャンを使用して、このステップを実行することができる。
【0156】
ステップA4は、読取体積に関してスキャン位置を測定するステップである。スキャンの時間期間にわたるスキャナの位置に関する情報が、記録される。このステップは、スキャンの進行中に、PIC 30を介してエンコーダ/デコーダ19からデータを読み取ることによって、PC 34がスキャナ位置を監視することによって実行される。
【0157】
ステップA5は、データ点の集合が順次取り込まれるデータ収集ステップである。検出器16a〜dからのデータ点の各集合は、PC 34によって平均をとられ、データ点の平均をとられた集合として保管される。
【0158】
ステップA6は、線形化ステップである。PCは、集合内の連続するデータ点が、スキャン中の獲得の時刻または位置に関して等間隔であることを保証するために、ステップA4で取得された相対的な測定された位置情報を使用してデータ点の集合を変更することによって、クラスシグネチャを判定する前にデータ点の集合を線形化する。
【0159】
ステップA7は、変換ステップである。PC 34は、データ点の平均をとられた集合に高速フーリエ変換(FFT)を適用する。FFTまたは他の変換を使用して、1つまたは複数のピークを含む変換されたデータ集合をもたらすことができる。
【0160】
ステップA8は、クラスシグネチャの判定を含む。ステップA7で見つかった変換の振幅ピークを閾値処理して、デジタル信号を導出する。このデジタル信号が、クラスシグネチャとして使用される。
【0161】
ステップA9は、比較ステップである。クラスシグネチャを、データベース40に保管された所定のクラスシグネチャのデータベースと比較する。
【0162】
ステップA10は、判断ステップである。クラスシグネチャの一致がデータベース40内で見つからない場合には、この装置はステップA11に進む。そうではなく、一致がクラスシグネチャに関して見つかる場合には、この装置は、特性シグネチャを検証するためにステップA12の実施に進む。
【0163】
ステップA11は、この装置が、物品のクラスシグネチャが認識されなかったことをこの装置のオペレータに警告することができる拒絶ステップである。オペレータは、その後、この通知にどのように取り組むかを判断することができる。
【0164】
ステップA12は、特性シグネチャを判定するステップである。このステップには、上で説明したものなどの特性シグネチャを判定するステップを含めることができる。しかし、測定された特性シグネチャと比較するためにデータベース内のすべての特性シグネチャをデータベース40から検索する前に、PC 34は、所定の特性シグネチャのうちで検索される部分集合を選択することができる。これは、測定された特性シグネチャとの一致に関する検索を高速化する。さらに、この実施形態では、この装置が、スキャン中に取得されたデータ点の同一の集合を使用して、クラスシグネチャと特性シグネチャとの両方を導出することができる。
【0165】
ステップA13は、もう1つの判断ステップである。特性シグネチャに関する一致がデータベース40内で見つからない場合に、この装置は、上で説明したステップA11に進む。
【0166】
ステップA14は、クラスシグネチャと特性シグネチャとの両方が認識される場合に達するステップである。このステップでは、様々な表示またはアクションが発生し得る。例えば、望み通りに、紙/ボール紙物品が有効に識別されたことの表示を、装置のオペレータに表示することができ、自動ロックリリースを作動させることなどができる。
【0167】
上の詳細な説明から、紙またはボール紙などの材料から作られた物品を、その材料をコヒーレント放射にさらすことと、その材料からのコヒーレント放射の散乱を測定するデータ点の集合を収集することと、データ点の集合から物品のクラス/特性シグネチャを判定することとによって、どのように識別できるかが理解される。
【0168】
また、スキャン区域が、そのサイズまたは物品の位置に関して本質的に任意であることが理解される。望まれる場合に、スキャンを、例えばより大きい2次元区域をカバーするためにラスタ化された直線スキャンとすることができる。
【0169】
さらに、物品をコヒーレント放射にさらすことと、物品の固有構造からのコヒーレント放射の散乱を測定するデータ点の集合を収集することと、データ点の集合から製品のクラス/特性シグネチャを判定することとによって、これを、パッケージングによる製品の識別、文書、または衣類の正札付きの品目の識別にどのように適用できるかが理解される。
【0170】
数値処理の上の説明から、ビーム位置の劣化(例えば、コヒーレントビームの準最適集光のゆえの読取体積でのビーム断面の拡大)が、このシステムにとって破滅的であるのではなく、偶然の一致の確率が高まることによってその性能が低下するだけであることを理解されたい。したがって、この装置は、装置変動に対して堅牢であり、突然の不安定な故障ではなく、性能の安定した漸進的劣化を与える。どの場合でも、応答データの特性最小特徴サイズを確かめるために収集されたデータに対して自己相関を実行することによって、リーダの自己テストを実行することは単純であり、これによって、すべての機器の問題が見つかる。
【0171】
例えば、紙またはボール紙に適用できるさらなるセキュリティ手段が、スキャンされる区域に透明シール(例えば、粘着テープ)を粘着によって接着することである。粘着は、特性シグネチャ検証スキャンを実行するために保存が必須である、下にある表面特徴がその除去によって破壊されるのに十分に強くなるように選択される。
【0172】
上で説明したように、このリーダは、特に本発明を実施するように設計された装置内で実施することができる。他の場合に、このリーダは、写真複写機機械、文書スキャナ、文書管理システム、POSデバイス、ATM、航空機チケット搭乗券リーダ、または他のデバイスなど、別の機能性を念頭において主に設計された装置に適当な補助構成要素を追加することによって設計される。
【0173】
図16Aから16Gに、本発明の様々な実施形態による注文仕立てのスクリーンを示す。このスクリーンは、標準的な製紙プロセスで使用することができる。痕跡を、所望のクラスシグネチャをもたらすために提供することができる。そのような痕跡は、1次元または2次元のパターン変形を組み込むことができる。刻印されるパターンは、スキャナがパターンの所望の周波数成分を検出することを保証するために、スキャンの長さ以下の周期性を有する周期的なものとすることができる。
【0174】
これらの注文仕立てのスクリーンを使用して、標準的な製紙スクリーンを置換することができる。
【0175】
スクリーンを作る様々な技法および材料は、当技術分野で周知であり(例えば、参考文献[6]から[13]を参照されたい)、これらを、注文仕立てのスクリーンに使用することもできる。例えば、スクリーンを、ステンレス鋼、ポリマ材料などから形成される、ワイヤ、板などを使用して作ることができる。
【0176】
図16Aに、本発明の実施形態による注文仕立てのスクリーン160を示す。注文仕立てのスクリーン160には、第1方向(y軸)で規則的な間隔163で間隔をあけられたワイヤ161a〜nのグリッドが含まれる。規則的な間隔をおかれた個々のワイヤ162a〜nの間隔をあけられたグループが、第1方向に横向きの第2方向(x軸)で規則的な間隔164で設けられる。したがって、このスクリーン160によって残される痕跡は、第1方向で単一の周波数成分を有する。これらの痕跡は、第2方向で第2周波数成分も有する。第1成分は、ワイヤ164のグループの間隔を反映し、第2成分は、ワイヤ間間隔165を反映する。
【0177】
図16Bに、本発明の実施形態による注文仕立てのスクリーン170を示す。注文仕立てのスクリーン170には、第1方向(y軸)で規則的な間隔173で間隔をあけられたワイヤ171a〜nのグリッドが含まれる。ワイヤ172a〜nの間隔をあけられたグループが、第1方向に横向きの第2方向(x軸)で規則的な間隔174で設けられる。第2方向で設けられるワイヤ172a〜nのグループは、グループ内の個々のワイヤの間の間隔が線形に増加するchirpedパターンに従って間隔をあけられる。
【0178】
したがって、このスクリーンによって残される痕跡は、第1方向で単一の周波数成分を有する。これらの痕跡は、グループ172a〜n内のワイヤに適用されたchirped空間変調に由来する第2方向の拡散周波数信号ならびに第2方向のグループの間の間隔174から導出される周波数成分をも有する。
【0179】
図16Cに、本発明の実施形態による注文仕立てのスクリーン180を示す。注文仕立てのスクリーン180には、第1方向(y軸)で規則的な間隔で間隔をあけられたワイヤ181a〜nのグリッドが含まれる。ワイヤ182a〜nの様々なグループが、第1方向に横向きの第2方向(x軸)で規則的な間隔184で設けられる。1つのそのようなグループが置かれている可能性がある場所で、この例では、ワイヤのより密にパックされたグループを組み込んだグループ182cが設けられる。
【0180】
このスクリーンによって残される痕跡は、第1方向で単一の周波数成分を有する。これらの痕跡は、第2方向で3成分の周波数信号をも有する。第1成分は、ワイヤ184のグループの間隔を反映し、第2成分は、ワイヤ間間隔を反映する。しかし、第3成分も、第1成分より高い周波数に存在する。第3成分は、グループ182c内のワイヤのより密なパッキングに由来する。
【0181】
第3周波数成分を検出することによって、グループ182cの間隔を有するワイヤのグループの紙製造中の使用を検出することができる。これを使用して、バイナリ信号をエンコードすることができる。他のグループワイヤ間間隔も、バイナリ桁またはバイトのシーケンスのエンコードを可能にするために設けることができる。周知の通り、そのようなバイトを使用して、様々な情報をエンコードすることができる。
【0182】
図16Dに、本発明の実施形態による注文仕立てのスクリーン190を示す。注文仕立てのスクリーン190には、第1方向(y軸)で規則的な間隔193で間隔をあけられたワイヤ191a〜nのグリッドが含まれる。ワイヤ192a〜nの間隔をあけられたグループが、第1方向に横向きの第2方向(x軸)で規則的な間隔194で設けられる。このグループ内のワイヤ192a〜nは、正弦波的に変化するパターンに従って間隔をあけられる。
【0183】
このスクリーンによって残される痕跡は、第1方向で単一の周波数成分を有する。これらの痕跡は、第2方向で、グループ192a〜n内のワイヤに適用された正弦波空間変調に由来する拡散周波数信号をも有する。様々な実施形態で、正弦波空間変調は、様々なエンコーディング方式を提供するためにそれ自体を変調できる搬送波周波数として働く。例えば、ワイヤを適当に間隔をあけることによって、位相偏移キーイング変調を、この搬送波正弦波に適用し、紙に適用されるパターンにエンコードすることができる。
【0184】
図16Eに、本発明の実施形態による注文仕立てのスクリーン200を示す。注文仕立てのスクリーン200には、第1方向(y軸)で規則的な間隔203で間隔をあけられたワイヤ201a〜nのグループのグリッドが含まれる。グループ内のワイヤ201a〜n自体は、規則的な間隔206で間隔をあけられる。規則的に間隔をあけられたワイヤ202a〜nの間隔をあけられたグループも、第1方向に横向きの第2方向(x軸)で規則的な間隔204で設けられる。
【0185】
このスクリーン200によって残される痕跡は、第1方向の2つの周波数成分および第2方向の2つの周波数成分を有する。第1方向の第1成分は、ワイヤ201a〜nのグループの間隔203を反映し、第2成分は、ワイヤ間間隔206を反映する。第2方向の第1成分は、ワイヤ202a〜nのグループの間隔204を反映し、第2成分は、ワイヤ間間隔205を反映する。
【0186】
図16Fに、本発明の実施形態による注文仕立てのスクリーン210を示す。注文仕立てのスクリーン210には、規則的な2次元パターンで間隔をあけられた複数の十字形パーフォレーション202を含む板201が含まれる。そのようなスクリーンは、シート材料のエッチングまたは押抜きによって形成することができる。
【0187】
図16Gに、本発明の実施形態による注文仕立てのスクリーン220を示す。注文仕立てのスクリーン220には、規則的な2次元パターンで間隔をあけられたパーフォレーション222および224の繰り返すパターンを含む板221が含まれる。パターンには、規則的な間隔223で間隔をあけられたグリッド配置に並べられた、異なるサイズおよび個数の円形パーフォレーション222および224の交番するグループの繰り返すシーケンスが含まれる。円形パーフォレーション222の第1グループは、一緒にグループ化された円形穴の3×3アレイからなる。円形パーフォレーション224の第2グループは、一緒にグループ化された円形穴の2×2アレイからなる。第1および第2のグループ222および224は、板221のほぼ同一の表面積を占める。
【0188】
スクリーン220によって残される痕跡は、グリッド間隔223に由来する周波数成分と、パーフォレーション222および224のグループから生じるより複雑な応答とを有する。そのような応答を測定し、使用して、注文仕立てのスクリーン220を使用して作られた紙/ボール紙物品のクラスシグネチャを提供することができる。
【0189】
図示のスクリーンによって作られる痕跡のすべてが、フーリエ変換または他の種類の変換分析を使用してクラスシグネチャを判定する機能的分析に基づいて分析できることを諒解されたい。
【0190】
本発明の特定の実施形態を説明したが、本発明の趣旨および範囲の中で、多数の変更/追加および/または置換を行えることを諒解されたい。
【0191】
(参考文献)
[1] Kravolec "Plastic tag makes foolproof ID" Technology Research News, 2 October 2002
[2] R Anderson "Security Engineering: a guide to building dependable distributed systems" Wiley 2001, pages 251-252 ISBN 0-471-38922-6
[3] US 5,521,984
[4] US 5,325,167
[5] GB 0405641.2 (未公開であるが、引用によりその内容が本明細書に組み込まれる。)
[6] US 4,564,051
[7] US 6,546,964
[8] US 4,546,964
[9] US 5,152,326
[10] US 5,358,014
[11] US 6,546,964
[12] US 2004/0011491
[13] WO 2004/020734
【符号の説明】
【0192】
1 リーダ装置
10 読取アパーチャ
12 ハウジング
14 レーザ源
15 コヒーレントレーザビーム
16a 光検出器要素
16b 光検出器要素
16c 光検出器要素
16d 光検出器要素
18 円柱レンズ
19 フォトトランジスタ
20 サブアセンブリ
22 駆動モータ
24 ベアリング
【技術分野】
【0001】
本発明は、セキュリティ方法、より具体的には、紙もしくはボール紙などの繊維質のシート材料から作られた、個人識別(ID)カード、銀行券、販売可能な製品、文書、または他の品目などの物品の信憑性の検証に関する。
【背景技術】
【0002】
多くの伝統的な認証セキュリティシステムは、製造業者以外の者が実行困難であるプロセスに依存する。この困難性は、資本設備の出費、技術的ノウハウの複雑さ、または好ましくはその両方によって強いられる。その例は、銀行券の透かしおよびクレジットカードまたはパスポートのホログラムの提供である。残念ながら、犯罪者は、より洗練されつつあり、事実上、元の製造業者が再生可能なもの全てを再生することができる。
【0003】
これゆえに、各トークンが一意であること、およびより重要なことに、測定可能でありしたがって後続検証の基礎として使用できる一意の特性を各トークンが有することをもたらす自然法則によって決定されるあるプロセスを使用してセキュリティトークンを作成することに依存する認証セキュリティシステムに対する既知の手法がある。この手法によれば、トークンは、一意の特性を取得する1組の形で製造され、測定される。次に、この特性を、コンピュータデータベースに保管し、または他の形で保存することができる。このタイプのトークンは、担体物品、例えば銀行券、パスポート、IDカード、重要な文書に組み込むことができる。その後、この担体物品をもう一度測定することができ、測定された特性を、データベースに保管された特性と比較して、一致があるかどうかを確定することができる。
【0004】
この一般的な手法の中で、異なる物理的効果を使用することが提案されてきた。複数の従来技術文書[1〜4]で検討された1つの物理的効果が、物品の固有特性からの、通常は特殊なトークンの形のレーザスペックルを使用して、一意の特性を提供することである。これらの技法によれば、特殊なトークンの全体など、大きい面積が、平行レーザビームによって照らされ、結果のスペックルパターンの大きい立体角部分が、CCDを用いて結像され、これによって、データ点からなる大きいアレイで構成される照射区域のスペックルパターンイメージを取得する。
【0005】
より最近に、さらなるレーザスペックルベースの技法が開発され[5]、この技法では、一意の特性が、集光されたレーザビームを物品上でスキャンすることと、多数の独立のデータ点を収集するために、物品の多数の異なる部分で散乱された光から通常は500個以上の多数のデータ点を収集することによって取得される。物品の多数の異なる部分に固有の多数の独立の信号寄与を収集することによって、スキャンされた物品の区域に固有のデジタルシグネチャを計算することができる。この技法は、未処理の紙、ボール紙、およびプラスチックを含む非常に様々な物品の表面から一意のシグネチャを提供することができる。
【0006】
この技法の重要な応用分野が、以下で「マスタデータベース」と称する保管されたシグネチャのデータベースからのセキュリティ検証である。例えば、香水工場で、香水瓶の各箱を、リーダによってスキャンして、シグネチャを取得することができ、これらのシグネチャが、マスタデータベースに入力される。このマスタデータベースには、作られたすべての物品すなわち香水の箱からのシグネチャが含まれる。後に、フィールド検証のために、リーダを使用して任意の香水の箱をスキャンして、シグネチャを取得することができ、このシグネチャが、マスタデータベースと比較されて、マスタデータベース内に保持された一致するシグネチャがあるかどうかが確定される。一致がない場合には、その物品は偽造品と考えられる。一致がある場合には、その物品は本物と考えられる。
【0007】
多くの応用例、例えば、国家安全保障、市民の文書調査、または大量のブランド商品において、マスタデータベースに保管されるシグネチャの数が、非常に多くなる場合がある。エントリの個数は、おそらく、数百万個、数千万個、または数億個になり得る。例えば、この方式が、人口の多い国のパスポートまたは運転免許証の検証に使用される場合に、そのようになる。
【0008】
すべてではないにせよ、ほとんどの応用例において、マスタデータベースの検索を、穏当な時間のうちに実行できることが必要である。穏当とされるものは、応用例によって異なるが、多くの応用例について、最長の穏当な時間は、1〜2秒に過ぎないであろう。これは、物品の個数が多くなる場合に達成がむずかしくなる可能性がある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】US 5,521,984
【特許文献2】US 5,325,167
【特許文献3】GB 0405641.2
【特許文献4】US 4,564,051
【特許文献5】US 6,546,964
【特許文献6】US 4,546,964
【特許文献7】US 5,152,326
【特許文献8】US 5,358,014
【特許文献9】US 6,546,964
【特許文献10】US 2004/0011491
【特許文献11】WO 2004/020734
【非特許文献】
【0010】
【非特許文献1】Kravolec "Plastic tag makes foolproof ID" Technology Research News, 2 October 2002
【非特許文献2】R Anderson "Security Engineering: a guide to building dependable distributed systems" Wiley 2001, pages 251-252 ISBN 0-471-38922-6
【発明の概要】
【発明が解決しようとする課題】
【0011】
したがって、おそらくはデータベースを参照せずに、すべての本物の物品に一般的な特性に基づいて物品の異なる種類の検証を実行できることが望ましいはずである。これは、各物品の一意の特性に基づく決定的な検証プロセスほどセキュアではないが、実行がより簡単であり、多数の明らかな偽造または模造品を選び出す陰性試験を提供するはずである。例えば、これを、一意のシグネチャに基づく検証の前の事前スクリーニング(pre-screening)テストとして使用できるはずである。
【課題を解決するための手段】
【0012】
本出願人のレーザスペックルベースのセキュリティ技法の初期開発中に、本出願人は、同一の連からとられた2枚の紙について測定された特性信号の間のランダム一致の計算された確率が、理論から期待されるほど低くはないことを発見して驚いた。1つの特定の実験で、計算は、所与の2枚の紙のおそらくはランダムな特性シグネチャが述べられたエラー閾値以内で一致する、約1/106の可能性があることを示した。しかし、試験中に、この品質の一致は、実際には、1日あたり数回観察されつつあった。これは、特性シグネチャが、完全にランダムではなく、ある紙と次の紙との間で一定である情報の構成要素を含むことを示した。
【0013】
続く調査により、紙がアーチファクト信号を生じ、このアーチファクト信号が、紙片間のランダムで不正確な一致の機会を増加させる要因であることを明らかにした。したがって、物品の誤った識別の可能性を減らすために、本出願人の装置は、以前には、アーチファクト信号の影響を除去するように動作した。
【0014】
このアーチファクト信号自体は、紙表面がスキャンされる時に光検出器から導出される出力信号に見られる1つまたは複数の周波数成分として現れる。任意の特定のアーチファクト信号に見られる周波数成分の周期および個数は、紙表面に対してスキャンするビームの方位に依存する。
【0015】
製紙プロセスの再検討の後に、本出願人は、現在、このアーチファクト信号が、乾燥プロセス中に製紙用パルプから水を除去するのに使用されるスクリーンに由来すると考えている[6、7、8、9、10、11、12、13]。そのようなスクリーンは、通常、規則的な間隔を有するワイヤメッシュを使用して形成される。そのようなスクリーンは、通常、可視のマーキングを紙に一切残さないように設計されるが、スクリーンは、それでも、普通の製紙プロセス中に紙に重大な痕跡を付与すると思われる。本出願人は、本出願人の装置が検出できるアーチファクト信号が、スクリーンによって付与された痕跡に起因すると考えている。
【0016】
さらなる実験は、このアーチファクト信号が、しばしば、同一の連からとられた紙に共通することを明らかにした。さらに、調査は、このアーチファクト信号が、経時的に安定し、特定の1枚の紙が、しわにする、こするなどによって損傷を受けた時であっても存在するままになることを明らかにした。しかし、興味深いことに、異なる供給業者からの紙は、一般に、異なるアーチファクト信号を有することがわかっている。
【0017】
したがって、このアーチファクト信号は有用な情報を担持すると思われる。なぜなら、このアーチファクト信号が、特定のスクリーンまたはスクリーン製品タイプを使用して作られたすべての紙の特性を示すと思われるからである。さらに、非常に様々なスクリーンタイプ、材料、および形状を与えられれば、この効果は、特定の供給源からの紙すなわち、特定のスクリーンまたはスクリーンタイプを使用して作られた紙を識別するクラスシグネチャを提供するのに適切であると思われる。
【0018】
このアーチファクト信号を使用してクラスシグネチャを提供することによって、紙の製造元を識別することができる。これは、それ自体ではかなり低いレベルのセキュリティだけを提供するが、信憑性に対する陰性試験を実行するための有用な技法を提供する。なぜなら、不合格であることが、物品の一意の個々のシグネチャと関わりなく、その物品が本物であり得ないことを明瞭に示すからである。
【0019】
さらに、この技法の使用は、所定の特性シグネチャを提供するために、製造された紙の全てをスキャンする必要はないことを保証する。この技法は、これによって、そのような所定の特性シグネチャの大きいデータ集合を保管する必要を回避するか減らすことができる。さらに、クラスシグネチャを取得するために、紙を、その表面のどこをスキャンしてもよい。これは、スキャンするビームを用いてスキャンされる物品の正確な位置合せの必要を減らすのを助ける。
【0020】
したがって、本発明の第1の態様によれば、読取体積(reading volume)内に置かれた紙またはボール紙から作られた物品を分析する装置が提供される。この装置は、光ビームを用いて物品をスキャンするスキャナと、ビームが読取体積をスキャンする時に取得される信号からデータ点の集合を収集する検出器配置と、物品が物品の固有特性から既知の包括的タイプの物品を識別する所定のクラスシグネチャを有するかどうかを判定するために、データ点の集合を処理するデータ獲得および処理モジュールとを含む。データ点のうちの異なるデータ点は、スキャン中の異なる時刻に取得された信号に関連する。様々な実施形態で、ソースは、コヒーレントビームが垂直に近い入射で物品に当たるように、コヒーレントビームを読取体積に向けるように取り付けられる。様々な実施形態で、スキャナは、垂直に近い入射で物品に向けてビームを投影するように構成される。
【0021】
物品の固有特性の周期的変動が、クラスシグネチャを提供するのに使用できるアーチファクト信号を生じることができる。様々な実施形態で、クラスシグネチャは、クラスシグネチャを判定するためにデータ点の集合の数学的変換を実行することによって取得される。次に、測定されたクラスシグネチャと所定のクラスシグネチャとの間の一致は、物品が、所定のクラスシグネチャのクラスに関連する包括的タイプの物品であることを示す。様々な実施形態で、データ点の集合の1つまたは複数のフーリエ変換(FT)が、アーチファクト信号を識別するために計算される。次に、FTスペクトルまたはその1つもしくは複数のピークを、クラスシグネチャとして使用することができる。
【0022】
データ点の集合の選択された部分集合を分析することもできる。例えば、どの部分集合がデータ点の変換された集合内で最大振幅のピークを生じるかを判定するために、そのような部分集合を分析することができる。そのような部分集合には、様々な方位で物品に対して実行されたスキャンに対応するデータ点を含めることができる。例えば、ある部分集合に、回転スキャンの一部を形成する円弧上で取得されたデータ点を含めることができる。
【0023】
所定のクラスシグネチャは、リモートに置くかハンドヘルドリーダに含めることができるデータベース内で提供することができる。本装置は、クラスシグネチャを使用するので、このデータベースは、比較的小さいものとすることができる。所定のクラスシグネチャは、高められたセキュリティのために暗号化することもできる。クラスシグネチャを所定のクラスシグネチャと突き合わせることによって、この特徴を組み込んだ装置は、製造業者/機械などによる、紙/カードから作られた物品の初期セキュリティスクリーニングを提供することができる。例えば、この装置には、物品が、米国のパスポートの紙で作られていないこと、英国の銀行券の紙で作られていないことなどをオペレータに示すことができる。
【0024】
この装置には、さらに、スキャン中にビームと物品との相対位置を測定するエンコーダ/デコーダモジュールを含めることができる。データ獲得および処理モジュールは、さらに、このエンコーダ/検出器モジュールから取得される相対的に測定された位置情報を使用することによって、クラスシグネチャを判定する前に、データ点の集合を線形化するように動作可能とすることもできる。集合内の連続するデータ点がスキャン中の獲得の時刻または位置に関して等間隔であることを保証するためにデータ点の集合を変更することによって、スキャンプロセスによって導入される非線形動きアーチファクトを、十分に除去することができる。
【0025】
検出器配置に、読取体積のそれぞれの異なる部分から散乱を感知するように配置され、構成された複数の検出器チャネルを含めることができる。そのような各検出器チャネルは、それぞれのクラスシグネチャを判定するのに使用される時刻シーケンス(または、同等に、線形スキャン位置シーケンス)データの集合を供給することができる。複数のそのようなそれぞれのクラスシグネチャの平均をとって、改善された信号対雑音比を有するクラスシグネチャの測定値を提供することができる。複数の検出器が、様々な実施形態で一意の特性応答を判定するのに使用されるので、平均化機能性の組込みは、この装置のコストまたは複雑さを大きく増やすことはない。
【0026】
ある種の実施形態で、データ点のうちの異なるデータ点が、読取体積内でのビームの直線スキャンによって取得される。スキャンには、ビームと読取体積との間の相対移動が含まれる。直線スキャンの使用は、機械的に単純であり、実施が比較的安価なので、有益である。直線スキャンは、クラスシグネチャを生じる痕跡の方位が事前に決定される場合(例えば、紙が、その上でその紙が製造されるスクリーンに関して必ず特定の形で切断される場合)にも有用である。直線スキャンは、一般に、クラスシグネチャを判定する時に比較的高速である。なぜなら、生成されるデータ点の集合が、そのクラスシグネチャを抽出するために最低限の処理だけを必要とするからである。
【0027】
様々な他の実施形態について、データ点のうちの異なるデータ点が、読取体積内でのビームの回転スキャンによって取得される。これらの実施形態について、データ点の後続処理を使用してクラスシグネチャを判定できるので、クラスシグネチャを読み取る時に物品を正確に位置決めする必要はない。有利なことに、回転スキャンが、ポータブルハンドヘルドスキャナを使用して実行される場合に、そのようなスキャナを、物品のどこにでも置くことができる。したがって、このタイプのハンドヘルドスキャナは、税関吏など、物品の大きい積荷からサンプルセット物品のその場での迅速なスキャンを実行する必要がある場合がある人員に役立つ。
【0028】
本発明の様々な実施形態は、クラスシグネチャを検証するためのスキャンと、一意の特性シグネチャを検証するためのスキャンとの両方を実行するように動作可能である。特性シグネチャの検証は、条件付きでクラスシグネチャの検証に続くものとするか、必須とすることができる。
【0029】
本発明の第2の態様によれば、紙またはボール紙から作られた物品を分析する方法が提供される。この方法は、物品を読取体積内に置くことと、光ビームを用いて物品をスキャンすることと、ビームが読取体積をスキャンする時に取得される信号からデータ点の集合を収集することと、物品が物品の固有特性から既知の包括的タイプの物品を識別する所定のクラスシグネチャを有するかどうかを判定するために、データ点の集合を処理することとを含む。データ点のうちの異なるデータ点は、スキャン中の異なる時刻に取得された信号に関連する。
【0030】
本発明のこの態様による方法には、さらに、本明細書で説明する本発明の第1の態様による装置によって実施しまたは提供することができる1つまたは複数の機能/動作を実行する方法ステップを含めることができる。
【0031】
本発明の第1の態様による装置は、本発明の第2の態様による方法を実施するのに使用することができる。例えば、本発明の第1の態様による装置は、物品を分析する方法を実行することによって、物品の信憑性を検証するのに使用することができる。この装置を使用して、特定の物品が、期待されるクラスシグネチャを有するかどうかを検査することができる。例えば、香水の箱が、250×400μm間隔を有する長方形グリッドの痕跡から生じるアーチファクト信号から導出されるクラスシグネチャを有すること、または、銀行券が、300μmの平行辺間隔を有する等辺六角形グリッドの痕跡から生じるアーチファクト信号から導出されるクラスシグネチャを有することを期待することができる。複雑な形状の痕跡に由来するクラスシグネチャを使用することも可能である。例えば、クラスシグネチャは、ハート形、星形などの痕跡に由来するものとすることができる。
【0032】
さらに、この装置を使用して、所定のパターンを刻印することによって紙/ボール紙に故意にエンコードされた情報を回復することができる。そのようなパターンは、可視である必要がない。例えば、情報を、紙製造中に使用された注文仕立てのスクリーンによって紙にエンコードされたクラスシグネチャから回復することができる。
【0033】
本発明の第3の態様によれば、紙物品またはボール紙物品を製造するスクリーンが提供される。スクリーンは、紙物品またはボール紙物品を既知の包括的タイプの物品として識別する所定のクラスシグネチャを提供するために物品に注文仕立ての痕跡パターンを付与するように配置され、構成された複数の要素を含む。このスクリーンは、所定のクラスシグネチャを提供するために物品に痕跡を故意に付与するためのものである。このスクリーンは、そのパターンが製紙産業で使用されているスクリーンに現在は見られない痕跡を提供する、注文仕立てのスクリーンである。そのような注文仕立てのスクリーンは、さらに、複雑な形状の痕跡パターンを提供することができる。
【0034】
上で示したように、この態様は、所定のクラスシグネチャを提供するために物品に痕跡を故意に付与することに関連する。スクリーンは、紙またはボール紙の製造中または製造後に、その紙またはボール紙に所望の痕跡を付与する任意の手段とすることができる。例えば、スクリーンを、穴のあいた表面とすることができ、あるいは、板、ワイヤなどから構成することができる。
【0035】
普通のスクリーンには、紙またはボール紙に周期的痕跡パターンを付与するために空間的に配置された要素が含まれる。周期的パターンを使用することによって、クラスシグネチャを判定するためのスキャンを、紙のどこであっても実行することができる。そのような周期的痕跡パターンは、FTまたは他の分析技法を使用する検出に適切な強い周波数成分を有するデータ点をももたらす。
【0036】
しかし、様々な関数形式、対称性などに従う紙の表面構造の空間変調を伝えるのに刻印の効果を利用するために特別なパターン付きのスクリーンを作るという可能性もある。
【0037】
この空間変調は、例えばバイナリデータビットなどのデータをエンコードするのに使用することができる。空間変調は、例えば、chirped変調、super-periodicity変調、振幅変調、位相偏移キーイング変調、または周波数偏移キーイング変調を使用してデータをエンコードするために提供することができる。
【0038】
痕跡パターンに、複雑な形状を組み込むことができる。例えば、星、ハートなどの非対称形状、または様々な変化する度合の対称性を有する形状を組み込んで、複数の周波数成分をアーチファクト信号に与えることができる。クラスシグネチャ認識に関する複雑な複数周波数成分の使用は、コピーをよりむずかしくし、認識できる可能なクラスシグネチャの数も増やす。
【0039】
1つまたは複数のビットシーケンスを、エンコーディング用の痕跡パターンを使用することによって紙またはボール紙にエンコードすることもできる。これは、情報を紙またはボール紙に組み込む多数の可能性をもたらす。例えば、製造業者、その紙を作った機械を識別する情報、期待されるクラスシグネチャに関する暗号化された情報などを、紙自体の中にエンコードすることができる。さらに、前に示したように、この情報を、堅牢に不可視に保管することができる。
【0040】
本発明の第4の態様によれば、注文仕立ての痕跡パターンを含む紙物品またはボール紙物品を作る方法が提供される。本発明のこの態様による方法は、注文仕立ての痕跡パターンを付与するために本発明の第3の態様によるスクリーンを使用することを含む。
【0041】
本発明の第5の態様によれば、紙物品またはボール紙物品であって、既知の包括的タイプに属するものとして物品を識別するためのクラスシグネチャを提供する注文仕立ての痕跡パターンを含むことを特徴とする紙物品またはボール紙物品が提供される。痕跡パターンは、可視でないものとすることができる。例えば、痕跡パターンを、裸眼に可視でないものとすることができる。
【0042】
紙/ボール紙の注文仕立ての痕跡パターンは、周期的とすることができる。様々な実施形態で、痕跡パターンは、次の方式すなわち、chirped変調、super-periodicity変調、振幅変調、位相偏移キーイング変調、および周波数偏移キーイング変調のうちの1つまたは複数に従って提供される空間変調を組み込む。1つまたは複数のビットシーケンスを紙またはボール紙にエンコードする痕跡パターンを使用することも可能である。
【0043】
主要な実施形態を、図面に関して説明する。これらの実施形態は、クラスシグネチャを、および任意選択として一意の特性シグネチャをも検出するのに使用することができる。検出器チャネルは、特性シグネチャを検出しなければならない時には、単純なフォトトランジスタの形の離散的な検出器構成要素から構成することができる。PINダイオードまたはフォトダイオードなど、他の単純な離散的な構成要素を使用することができる。検出器アレイなどの集積された検出器構成要素を使用することもできるが、これは、デバイスのコストおよび複雑さを増加させてしまう。
【0044】
スキャンされる物品へのビームの照明角度を変更する初期の実験から、実際には、物品が測定と測定との間に劣化する場合であっても、同一表面から、ほとんど変化のないように繰り返して測定できる特性を取得するために、ビームが、スキャンされる表面にほぼ垂直に入射することが重要であるとも思われる。
【0045】
したがって、ビームが垂直に近い入射で物品に当たるようにビームを読取体積に向けるように源を取り付けることが、都合が良い。垂直に近い入射とは、±5°、±10°、または±20°を意味する。代替案では、ビームを、物品への斜めの入射を有するように向けることができる。これは、通常、ビームが物品上でスキャンされる場合に、悪影響を有する。
【0046】
また、発明を実施するための最良の形態で説明するリーダでは、検出器配置が、読取体積から後方散乱される放射を検出するために反射で配置される。しかし、物品が透明である場合には、検出器を透過で配置することができる。
【0047】
実施形態の一群で、データ獲得および処理モジュールは、所定のエンコーディングプロトコルに従う信号成分を識別するため、およびそれから所定の特性シグネチャを生成するために、データ点をさらに分析するように動作可能である。所定のエンコーディングプロトコルの特性は、ほとんどの実施形態で、コントラストすなわち散乱信号強度に基づくと考えられる。特に、普通のバーコードプロトコルを使用することができ、このバーコードは、1Dバーコードの場合にはストライプの形で、あるいは2Dバーコードの場合にはより複雑なパターンの形で、物品に印刷するか他の形で付けられる。この場合に、データ獲得および処理モジュールは、所定の特性シグネチャが、読取体積内に置かれた物品を読み取ることによって取得される特性シグネチャと一致するかどうかを確定するために比較を実行するように動作可能とすることができる。その結果、1枚の紙などの物品を、バーコードなど、それ自体の特性シグネチャのデジタル署名された版をもつようにマークすることができる。所定の特性シグネチャは、1方向関数を用いてすなわち、秘密鍵を必要とする非対称暗号化アルゴリズムを使用して、物品の特性シグネチャから取得されなければならない。これは、偽造物品を読み取り、この暗号化方式によるリーダのスキャンを表すラベルをその物品に印刷することを望む、リーダを有する権限のない第三者に対する障壁として働く。通常、バーコードラベルまたは他のマークは、公開鍵によって解読可能な暗号文を表し、秘密鍵は、権限のあるラベラ当事者のために予約されるはずである。
【0048】
所定の特性シグネチャまたはクラスシグネチャなどのシグネチャのデータベースを設けることができる。データ獲得および処理モジュールは、このデータベースにアクセスし、比較を実行して、このデータベースが読取体積に置かれた物品の特性シグネチャまたはクラスシグネチャとの一致を含むかどうかを確定するように動作可能とすることができる。このデータベースは、リーダ装置の一部を形成する大容量記憶装置の一部とすることができ、あるいは、リモート位置にあり、遠隔通信リンクを介してリーダによってアクセスされるものとすることができる。この遠隔通信リンクは、無線リンクおよび固定リンクを含む任意の普通の形をとることができ、インターネットを介して使用可能とすることができる。データ獲得および処理モジュールは、少なくともいくつかの動作モードで、一致が見つからない場合に特性シグネチャまたはクラスシグネチャをこのデータベースに追加することを可能にするように動作可能とすることができる。このファシリティは、通常、自明な理由により、権限のある人に対してのみ許可される。
【0049】
データベースを使用する時には、シグネチャを保管することに加えて、データベース内のシグネチャを、文書のスキャンされたコピー、パスポート保持者の写真、製品の製造の場所および時刻に関する詳細、または販売可能商品の所期の販売宛先に関する詳細(例えば、闇取引に近い輸入を追跡するために)などの物品に関する他の情報に関連付けることが有用である場合もある。
【0050】
上で説明したリーダ装置は、例えば生産ラインで、一連の物品を読み取ることによってデータベースに特性シグネチャを取り込むために、および/または後に、例えば現場での使用時に、物品の信憑性を検証するために使用することができる。
【0051】
本発明は、紙およびボール紙など、様々な異なる種類の全体的に凝縮された繊維質のシート材料から作られた物品の識別を可能にする。
【0052】
本発明の様々な実施形態は、物品が改ざんされたかどうかを確かめることを可能にする。これは、粘着テープなどの粘着によって接着された透明フィルムが、特性シグネチャを作成するのに使用されるスキャンされる区域をカバーする場合に、可能である。このテープを、物品を改ざんするために、例えば梱包箱を開くために、除去しなければならない場合に、除去すると下部にある表面が必ず変更されるように、粘着性の接着を選択することができる。その結果、類似するテープがその箱を再封するのに使用される場合であっても、当該除去が検出可能になる。
【0053】
紙またはボール紙は、本明細書では、木材パルププロセスを使用して作られるすべての物品を意味する。紙またはボール紙は、コーティングまたは含浸によって処理するか、セロハンなどの透明材料によってカバーすることができる。表面の長期間の安定性が特に重要である場合には、紙を、例えばアクリルのスプレー式透明コーティングによって処理することができる。
【0054】
本発明は、次の例のリストからの紙物品またはボール紙物品に特に有用と考えられる。
1.株券、銀行券、船荷証券、パスポート、政府間の条約、法律、運転免許証、車両安全証明書(vehicle roadworthiness certificate)、および実物証明書(certificate of authenticity)などの重要文書
2.例えば郵便システムの封筒など、トレースまたは追跡のためのすべての文書
3.販売可能製品のパッケージング
4.ファッション品目など、デザイナ商品のブランドラベル
5.化粧品、医薬品、または他の製品のパッケージング。
【0055】
本発明は、パッケージング、文書、および衣類を含む様々な異なるタイプの物品の識別も可能にする。物品を、パッケージングに含めることができ、任意選択として、パッケージングを、改ざんを防止する形で密封することができる。代替案では、パッケージングを、視覚的に損傷を与えずに解放することができないコネクタによって固定されたタグなど、物品への追加物とすることができる。これは、例えば、医薬製品、化粧品商品および香水、ならびに航空機あるいは陸上または水上の乗物の予備部品に特に有用である場合がある。
【0056】
要約すると、この特性シグネチャまたはクラスシグネチャは、いくつかの場合に、パッケージングなど、販売可能製品に付随するものから取得することができ、他の場合に、文書または販売可能製品の表面構造からなど、物体自体から取得することができる。本発明は、例えば、薄闇市場輸入または偽造を制御するために、多数の実用的な応用例を見出すことができる。そのような応用例において、ポータブルリーダを、税関吏または取引基準局員が使用することができる。
【0057】
特性シグネチャまたはクラスシグネチャは、ほとんどの応用例について、デジタルシグネチャとしてエンコードすることができる。現在のテクノロジを用いてデジタルエンコードされた特性シグネチャの通常のサイズは、200ビットから8kビットまでの範囲内になるはずであり、現在、高いセキュリティのために約2kビットのデジタルシグネチャサイズを有することが好ましい。クラスシグネチャは、物品識別に関してより少ないセキュリティ機構を提供するので、特性シグネチャより少数のビットを使用してエンコードすることができる。デジタルエンコードされたシグネチャ自体を、暗号化アルゴリズムを使用してエンコードすることができる。
【0058】
本発明のよりよい理解のために、および本発明を実行に移すことができる形を示すために、これから、例として添付図面を参照する。
【図面の簡単な説明】
【0059】
【図1】本発明を実施するリーダ装置を示す概略側面図である。
【図2】リーダ装置の読取体積が、それを横切って細長いビームをスキャンすることによって、どのようにn回サンプリングされるかを示す概略透視図である。
【図3】リーダ装置の機能構成要素を示すブロック概略図である。
【図4】リーダ装置の実施形態の外部の形を示す透視図である。
【図5】リーダ装置の代替実施形態を示す概略透視図である。
【図6A】指向性光コレクションおよびブランケット照明に基づく、本発明を実施するリーダの代替結像配置を概略的に示す側面図である。
【図6B】指向性検出器が細長いビームによる局所化された照明と組み合わせて使用される、本発明を実施するリーダのもう1つの代替結像配置の光学フットプリントを概略的に示す平面図である。
【図7A】エンコーダ信号を用いる線形化の後の、単一の光検出器からとられたデータ点の集合のデータを示す図である。
【図7B】図7Aに示されたデータ点の集合のFTを示す図である。
【図8A】紙がスキャン方向に関して回転される時にFTピークの振幅がどのように変化するかを示す図である。
【図8B】紙がスキャン方向に関して回転される時に最大FTピークの波長が角度に伴ってどのように変化するかを示す図である。
【図9】クラスシグネチャが、どのようにして物品から測定され、認証または記録されるかを示す流れ図である。
【図10A】光検出器信号およびエンコーダ信号からなる、図1のリーダを使用する単一の光検出器からの生データを示す図である。
【図10B】エンコーダ信号を用いる線形化および振幅の平均化の後の図10Aの光検出器データを示す図である。
【図10C】平均レベルによるデジタル化の後の図10Bのデータを示す図である。
【図11】物品の特性シグネチャがスキャンからどのように生成されるかを示す流れ図である。
【図12】スキャンから取得された物品のシグネチャをシグネチャデータベースに対してどのように検証できるかを示す流れ図である。
【図13A】紙またはボール紙から作られた物品からのクラスシグネチャを判定する回転スキャン装置で使用される回転スキャナを示す図である。
【図13B】図13Aに示された回転スキャナのハウジングにはまるリッドを示す図である。
【図14A】クラスシグネチャが、どのようにして回転スキャンを使用して物品から測定され、認証または記録されるかを一緒に示す流れ図である。
【図14B】クラスシグネチャが、どのようにして回転スキャンを使用して物品から測定され、認証または記録されるかを一緒に示す流れ図である。
【図15】本発明の実施形態による装置がどのように動作するかを示す流れ図である。
【図16A】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【図16B】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【図16C】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【図16D】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【図16E】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【図16F】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【図16G】本発明を実施する様々な注文仕立てのスクリーンを概略的に示す図である。
【発明を実施するための形態】
【0060】
図1は、本発明を実施するリーダ装置1を示す概略側面図である。光学リーダ装置1は、この装置の読取体積内に配置された物品(図示せず)からクラスシグネチャおよび特性シグネチャを測定するためのものである。読取体積は、ハウジング12内のスリットである読取アパーチャ10によって形成される。ハウジング12には、この装置の主要な光学部品が含まれる。スリットは、x方向(図の挿入された軸を参照されたい)にその主要な範囲を有する。主要な光学部品は、コヒーレントレーザビーム15を生成するレーザ源14と、複数のk個の光検出器要素から構成される検出器配置16とであり、ここで、この例ではk=4であり、光検出器要素には、16a、16b、16c、および16dという符号が付けられている。レーザビーム15は、円柱レンズ18によって、y方向(この図の平面に垂直)に延び、読取アパーチャの平面内に横たわる細長い焦点に集光される。例の原型リーダでは、細長い焦点が、約2mmの長軸寸法および約40μmの短軸寸法を有する。これらの光学部品は、サブアセンブリ20に含まれる。図示の実施形態では、4つの検出器要素16a...dが、ビーム軸から互いに入り込んだ配置で異なる角度でオフセットしてビーム軸の両側に分散されて、読取体積内に存在する物品からの反射内で散乱された光を収集する。例の原型では、オフセット角度が、-70°、-20°、+30°、および+50°である。ビーム軸の両側の角度は、等しくならないように選択され、その結果、収集されるデータ点ができる限り独立になるようになっている。4つのすべての検出器要素が、共通の平面内に配置される。光検出器要素16a...dは、コヒーレントビームが読取体積から散乱する時に、ハウジングに置かれた物品から散乱された光を検出する。図示のように、源は、そのビーム軸をz軸内に置いてレーザビーム15を向けるように取り付けられ、その結果、ビーム軸が、読取アパーチャ内で垂直入射で物品に当たるようになっている。
【0061】
一般に、焦点深度が大きく、その結果、z方向での物品位置決めの相違が、読取アパーチャの平面でのビームのサイズの大きい変化をもたらさないことが望ましい。例の原型では、焦点深度が、約0.5mmであり、これは、よい結果を作るのに十分に大きい。焦点深度、開口数、および作動距離のパラメータは、独立であり、スポットサイズと焦点深度との間の周知のトレードオフをもたらす。
【0062】
駆動モータ22が、矢印26によって示されるように、適切なベアリング24または他の手段を介する光学サブアセンブリ20の直線スキャン移動をもたらすためにハウジング12内に配置される。したがって、駆動モータ22は、読取アパーチャ10上でx方向に直線状にコヒーレントビームを移動するように働き、その結果、ビーム15は、細長い焦点の長軸に横向きの方向でスキャンされるようになる。コヒーレントビーム15は、その焦点で、コヒーレントビームに垂直な平面内の読取体積の射影よりはるかに小さいxz平面(図の平面)すなわち読取アパーチャがセットされるハウジング壁の平面内で断面を有する寸法にされているので、駆動モータ22のスキャンは、コヒーレントビーム15に、駆動モータ22の作用の下で読取体積の多数の異なる部分をサンプリングさせる。
【0063】
図2は、スキャンによってもたらされるサンプリングを示すために含まれ、読取区域が、それを横切って細長いビームをスキャンすることによって、どのようにn回サンプリングされるかを示す概略透視図である。駆動装置の作用の下で読取アパーチャに沿ってスキャンされる時の集光されたレーザビームのサンプリング位置は、1からnまでの番号を付けられた隣接する長方形によって表され、これらの長方形は、長さ「l」および幅「w」の区域をサンプリングする。データ収集は、駆動装置がスリットに沿ってスキャンされる時に、n個の位置のそれぞれで信号を収集するために行われる。その結果、k×n個のデータ点のシーケンスが収集され、このデータ点のシーケンスは、読取体積のn個の異なる図示の部分からの散乱に関連する。したがって、各検出器kは、コヒーレントビームが読取体積をスキャンする時の異なる時刻に取得されたn個のデータ点の関連するシーケンスを有する。
【0064】
同様に概略的に図示されているが、ハウジング12の下側でスリット10に隣接してx方向すなわちスキャン方向に沿って形成された距離マーク28である。これらのマークの間のx方向の例の間隔は、300μmである。これらのマークは、細長い焦点の尾によってサンプリングされ、下でより詳細に説明するように、x方向でのデータの線形化をもたらす。測定は、追加のフォトトランジスタ19によって実行され、このフォトトランジスタ19は、スリットに隣接するマーク28の区域からの光を収集するように配置された指向性検出器である。
【0065】
代替実施形態では、マーク28は、光学サブアセンブリ20の一部である専用のエンコーダエミッタ/検出器モジュール19によって読み取られる。エンコーダエミッタ/検出器モジュールは、バーコードリーダで使用される。例えば、本発明人は、集光発光ダイオード(LED)および光検出器に基づくAgilent社のHEDS-1500モジュールを使用した。モジュール信号は、余分の検出器チャネルとしてPIC ADCに供給される。
【0066】
通常、製造プロセス中に紙に設けられる刻印された特徴は、約200μmと約600μmとの間の周期性を有する。したがって、データ点のサンプリングは、存在する可能性がある最小のありそうな刻印された特徴を検出するために、少なくとも100μmおきまたはそれ未満で行われなければならない。動作の1つのモードで、この装置は、k個の検出器のデータ点の集合を取り込むために、90μmおきに1つ程度のデータ点を取得するための迅速だが比較的粗い初期スキャンを実行することができる。次に、データ点の集合のうちの1つまたは複数を、下で説明する技法を使用して分析して、クラスシグネチャを判定することができる。クラスシグネチャとの一致が見つかる場合に、この装置は、個々の物品の一意の特性シグネチャを測定しようと努めることができる。
【0067】
その後、またはその代わりに、より微細な分解能のスキャンを行うことができる。このスキャンは、特性シグネチャまたはクラスシグネチャと特性シグネチャとの両方の測定に使用することができる。例えば、40μmの焦点という例の小さい寸法および2cmというx方向でのスキャン長を用いると、n=500であり、k=4では2000個のデータ点が与えられる。所望のセキュリティレベル、物品タイプ、検出器チャネルの個数「k」、および他の要因に依存するk×nの値の通常の範囲は、100<k×n<10000になると期待される。また、検出器の個数kを増やすことによって、ハンドリング、印刷などを介する物品の表面劣化に対する測定の鈍感さも改善されることがわかっている。実際には、これまでに使用された原型について、経験則は、非常に様々な表面で許容可能に高いセキュリティレベルを与えるために、独立のデータ点の総数すなわちk×nを500個以上にしなければならないということである。
【0068】
図3は、リーダ装置の機能構成要素のブロック概略図である。モータ22は、電気リンク23を介してプログラマブル割込みコントローラ(PIC)30に接続される。検出器モジュール16の検出器16a...dは、それぞれの電気接続線17a...dを介して、PIC 30の一部であるアナログ-デジタル変換器(ADC)に接続される。類似する電気接続線21が、マーカー読取検出器19をPIC 30に接続する。光リンクまたは無線リンクを、電気リンクの代わりにまたは電気リンクと組み合わせて使用できることを理解されたい。PIC 30は、シリアル接続32を介してパーソナルコンピュータ(PC)34に結合される。PC 34は、デスクトップ機またはラップトップ機とすることができる。PCの代替物として、例えば携帯情報端末(PDA)または専用電子ユニットなど、他のインテリジェントデバイスを使用することができる。PIC 30およびPC 34は、集合的に、検出器16a...dによって収集されたデータ点の集合から物品のシグネチャを判定するデータ獲得および処理モジュール36を形成する。PC 34は、インターフェース接続38を介してデータベース(dB)40にアクセスすることができる。データベース40は、PC 34上でメモリ内に常駐することができ、あるいは、PC 34のドライブに保管されることができる。その代わりに、データベース40を、PC 34からリモートとし、例えば携帯電話サービスまたはインターネットと組み合わされた無線ローカルエリアネットワーク(LAN)を使用して、無線通信によってアクセスすることができる。さらに、データベース40を、PC 34にローカルに保管するが、リモートソースから周期的にダウンロードすることができる。
【0069】
データベース40には、前に記録されたクラスシグネチャおよび特性シグネチャのライブラリが含まれる。この実施形態に基づく変形では、データベース40に、所定のクラスシグネチャのライブラリだけが含まれる。PC 34は、使用中に、データベース40にアクセスし、データベース40に、読取体積に置かれた物品のシグネチャとの一致が含まれるかどうかを確定するために比較を実行するようにプログラムされる。PC 34を、一致が見つからない場合にシグネチャをこのデータベースに追加することを可能にするようにプログラムすることもできる。この使用のモードは、権限のあるユーザによる使用のために予約され、検証のためにのみ現場で使用されるシステムからは省略することができる。
【0070】
図4は、リーダ装置1の外部の形を示す透視図である。ハウジング12およびスリットの形の読取アパーチャ10は明白である。物理位置決め補助器具42は、やはり明白であり、読取アパーチャ10に関する固定された位置での所与の形の物品の位置決めのために設けられる。図示の例では、物理位置決め補助器具42は、文書または梱包箱の角を置くことができる直角ブラケットの形である。これは、物品をスキャンする必要がある時に、必ず、その物品の同一部分を読取アパーチャ10内に位置決めできることを保証する。単純な角ブラケットまたは同等物が、紙、パスポート、IDカード、および梱包箱などの明確に定義された角を有する物品に十分である。
【0071】
原稿送り装置を設けて、物品配置が一貫することを保証することができる。例えば、この装置は、文書スキャナ、写真複写機、または文書管理システムの任意の普通のフォーマットに従うことができる。梱包箱について、代替案は、適切な案内穴、例えば、長方形の箱の底部を受け入れる長方形断面の穴または筒状の箱(すなわち、円筒形の箱)の底部を受け入れる円形断面の穴を設けることであるはずである。
【0072】
物理位置決め補助器具42は、リーダ装置1が、クラスシグネチャと特性シグネチャとの両方を検査する場合に設けられる。しかし、この特徴またはその機能的同等物は、クラスシグネチャに関する検査を実行するのみであるリーダ装置1の変形例においては、存在する必要がない。
【0073】
図5は、物品の群をスクリーニングすることを意図されたリーダ装置1'を示す代替実施形態の概略透視図である。このリーダは、その上にパッケージングの物品を置くことができるコンベヤベルト44に基づくが、表現を単純にするために1つの物品5だけが図示されている。物品5上の読取区域10'が、物品5がコンベヤベルト44上で通過する時に、静止レーザビーム15によってスキャンされる。レーザビーム15は、コンベヤベルト44の横の定位置に固定されて配置されたレーザ源14によって生成される。レーザ源14は、高さ「h」でコンベヤベルト44の上を通過し、これによって高さ「h」で物品5と交差して読取区域10'上をスキャンするためにz方向で(すなわち、床に水平に)移動する鉛筆様のほぼ平行のビームを作るために一体のビーム収束レンズ(図示せず)を有する。ビーム断面は、スポットすなわち円形(例えば、一体の球面レンズを用いて作られる)またはy方向に延びる直線(例えば、一体の円柱レンズを用いて作られる)とすることができる。1つの物品だけが図示されているが、類似する物品のストリームを運び、これらがビーム15を通過する際に連続してスキャンできることを諒解されたい。
【0074】
コンベヤベースのリーダ装置の機能構成要素は、さらに上で説明した独立型リーダ装置の機能構成要素に似ている。実質の唯一の相違は、スキャンビームと物品との間の所望の相対的な動きを生成するために、レーザビームではなく物品が移動されることである。
【0075】
コンベヤベースのリーダを、一連の物品を読み取ることによって、データベースにクラスシグネチャ/特性を表すシグネチャを取り込むために生産ライン環境または倉庫環境で使用できると考えられる。制御として、各物品をもう一度スキャンして、記録されたシグネチャを検証できることを検証することができる。これは、直列で動作する2つのシステムを用いて、または各物品が2回通過する1つのシステムを用いて行うことができる。バッチスキャンを、販売時点(POS)で、またはPOS機器構成要素に基づくリーダ装置を使用して適用することもできる。
【0076】
上で説明した実施形態は、励起の局所的区域を含むはるかに大きい区域に亘って散乱された光信号を受け入れる検出器と組み合わされた、小さい断面のコヒーレント光ビームを有する局所化された励起に基づく。その代わりに、はるかに大きい区域の励起と組み合わされた、局所化された区域からのみ光を収集する指向性検出器に基づく、機能的に同等の光学系を設計することが可能である。
【0077】
図6Aに、指向性光コレクション(directional light collection)およびコヒーレントビームによるブランケット照明に基づく、本発明を実施するリーダのそのような結像配置を側面図で概略的に示す。アレイ検出器48が、円柱マイクロレンズアレイ46と組み合わせて配置され、その結果、検出器アレイ48の隣接するストリップは、読取体積内の対応する隣接するストリップからの光だけを収集するようになっている。図2を参照すると、各円柱マイクロレンズは、n個のサンプリングストリップのうちの1つから光信号を収集するように配置される。次に、コヒーレント照明を、読取体積全体(この図には図示せず)のブランケット照明を用いて行うことができる。
【0078】
局所化された励起と局所化された検出との組合せを用いるハイブリッドシステムも、いくつかの事例で有用である場合がある。
【0079】
図6Bに、指向性検出器が細長いビームによる局所化された照明と組み合わせて使用される、本発明を実施するリーダのそのようなハイブリッド結像配置の光学フットプリントを平面図で概略的に示す。この実施形態は、指向性検出器が設けられる、図1の実施形態の発展形と考えることができる。この実施形態では、指向性検出器の3つのバンクが設けられ、各バンクは、「l×w」励起ストリップに沿った異なる部分からの光を収集するように向けられている。読取体積の平面からの収集区域は、破線の円によって示されており、その結果、例えば2つの、検出器の第1バンクが、励起ストリップの上側部分からの光信号を収集し、検出器の第2バンクが、励起ストリップの中央部分からの光信号を収集し、検出器の第3バンクが、励起ストリップの下側部分からの光を収集するようになっている。検出器の各バンクは、約l/mの直径の円形の収集区域を有するものとして図示されており、ここで、mは、励起ストリップの副分割の個数であり、現在の例ではm=3である。この形で、独立のデータ点の個数を、所与のスキャン長lについてm倍だけ増やすことができる。下でさらに説明するように、指向性検出器の異なるバンクのうちの1つまたは複数を、スペックルパターンをサンプリングする光信号の収集以外の目的に使用することができる。例えば、バンクのうちの1つを、バーコードスキャンに最適化された形で光信号を収集するのに使用することができる。そうである場合に、そのバンクに1つの検出器だけを含めることが、一般に十分である。なぜなら、コントラストについてスキャンするだけの時に、相互相関を取得することに利点がないからである。
【0080】
ここで、本発明を実行するのに適切な様々なリーダ装置の主要な構造的構成要素および機能的構成要素を説明し終えたので、クラスシグネチャおよび特性シグネチャを判定するのに使用される数値処理を、これから説明する。この数値処理が、大部分は、PC 34で動作するコンピュータプログラムで実施され、いくつかの要素がPIC 30に従属することを理解されたい。
【0081】
図7Aに、エンコーダ信号を用いる線形化の後の、図1のリーダの単一の光検出器16a...dからとられたデータ点の集合のデータを示す。x軸の点番号は、読取体積内に置かれ、コヒーレントビームによってスキャンされた標準A4の紙からサンプリングされたデータ点に対応する。
【0082】
図7Bに、図7Aに示されたデータ点の線形化された集合のFTを示す。
【0083】
図7Aのデータ点は、十分にランダムであるように見えるが、図7Bでは、422μmの波長に強いピークがあることがわかる。本発明人は、紙の表面の異なる場所で、および同一連からとられた異なる紙について、同一のクラスシグネチャを導出した。異なる製造業者の紙を使用する類似するスキャンおよびFTは、287μmのピーク波長を生じ、これは、異なるメッシュ上で作られた紙の間で区別できるクラスシグネチャをもたらすのに、ピーク波長をどのように使用できるかを示す。
【0084】
FTピークの波長は、紙がコヒーレントビームスキャン方向に関して向けられている方向に依存することがわかっている。例えば、第1の紙は、「ポートレート」方位でスキャンされる時に422μmのピーク波長を生じ、「ランドスケープ」方位でスキャンされる時に274μmのピーク波長を生じた。さらに、紙の片面は、しばしば、他方の面より強いFTピークを与える。本発明人は、これが、紙の製造中にメッシュと接触していた紙の面に生じる、より強い表面コルゲーションに起因すると考える。
【0085】
本発明人は、紙に対する自然劣化、意図的な劣化、および損傷が、クラスシグネチャを変化させ、または読取不能にするかどうかを調べるために、紙に対して堅牢性テストを実行した。特に、本発明人は、紙をしわにし、その表面を強くこすった。強い変化は、クラスシグネチャでは見られなかったが、より多くの雑音が、スペクトルの下側周波数端に現れた。また、本発明人は、紙を、医療用オートクレーブで高圧蒸気にさらした。FTピークは、それでも、オートクレーブの後に明瞭に可視であったが、その波長は、426μmから418μmに1.7%だけ減少することがわかった。本発明人は、これを、蒸気からの乾燥時の紙繊維の縮小に起因すると考える。紙の視覚的検査は、紙がオートクレーブで強く劣化したことを示した。しかし、この損傷の度合は、通常の応用例については想定されない。
【0086】
図8Aに、紙がスキャン方向に関して90°回転される時にFTピークの振幅がどのように変化するかを示す。紙のくぼみは、寸法408μm×274μmの長方形グリッドを形成すると考えられる。0°では、ビームスキャン方向が、408μmの周期的な間隔のグリッドくぼみに垂直である。強い信号が、約0°、45°、および90°に現れる。90°の信号は、スキャン方向が、274μmの周期的な間隔のグリッドくぼみに垂直である時に生じる。
【0087】
図8Bに、紙がスキャン方向に関して回転される時に最大FTピークの波長が角度に伴ってどのように変化するかを示す。最大FTピークの波長は、角度が0°から約10°まで回転される時に、約408μmでほとんど一定である。本発明人は、クラスシグネチャに対応するFTのピークが、スキャンレーザ方向が製造メッシュに由来する表面リップルの長軸から約±10°以内である時に、最もよく検出されることを見つけた。これは、細長いレーザスポット(約2mm長)の投影が、回転角が約10°を超えたならば、リップルの間の間隔に匹敵するようになるからである。
【0088】
図9は、クラスシグネチャが、どのようにして物品から測定され、認証または記録されるかを示す流れ図である。
【0089】
ステップA1は、スキャンモータが始動される最初のステップである。スキャンモータは、速度vで移動するようにプログラムされる。
【0090】
ステップA2は、光検出器のそれぞれでの光強度が、スキャンの全長中に約1msおきに獲得される、データ獲得ステップである。サンプル点の間の時間間隔は、Δtである。同時に、エンコーダ信号が、時間の関数として獲得される。スキャンモータが、高い度合の線形化精度を有する(例えば、ステッパモータのように)場合に、エンコーダ信号を獲得する必要がないことに留意されたい。データは、PIC 30がADC 31からデータをとることによって獲得される。データ点は、リアルタイムでPIC 30からPC 34に転送される。代替案では、データ点を、PIC 30内のメモリに保管し、その後、スキャンの終りにPC 34に渡すことができる。各スキャンで収集される検出器チャネルあたりのデータ点の個数nは、次ではNと定義される。さらに、値ak(i)は、光検出器kからのi番目に保管された強度値と定義され、iは、1からNまで変化する。そのようなスキャンから取得された2つの生データ集合の例を、図10Aに示す。
【0091】
ステップA3は、スキャンヘッドを戻すステップである。スキャンモータを逆転して、後続のスキャン動作に備えてスキャン機構をその初期位置にリセットする。
【0092】
ステップA4は、任意選択の線形化ステップである。実行される場合に、このステップは、局所的に延ばされ、縮められたak(i)に数値補間を適用し、その結果、エンコーダ遷移が時間的に等間隔になるようにする。これによって、モータ速度の局所的変動についてデータ点の集合が訂正される。このステップは、PC 34内で、コンピュータプログラム制御の下で実行される。
【0093】
ステップA5は、ak(i)のフーリエ変換のFT振幅スペクトルAk(i)が計算されるFTステップである。このステップは、データ点のk個の集合の個々への高速フーリエ変換(FFT)の適用によって、PC 34内でコンピュータプログラム制御の下で実行される。任意選択として、平均をとられたFT振幅スペクトルを、k個の個々の振幅スペクトルのそれぞれから計算することができる。
【0094】
ステップA6は、i=0(直流成分)を除いて、Ak(i)を最大にするiの値を識別する識別ステップである。このインデックスipeakは、PC 34内でコンピュータプログラム制御の下で識別される。
【0095】
ステップA7は、ipeakに関連する波長が、式λpeak=2π/(ipeak×vΔt)に従ってPC 34内で判定される、計算ステップである。このピーク波長λpeakは、その後、クラスシグネチャとして使用される。
【0096】
ステップA8は、判断点である。物品が、そのクラスシグネチャを記録されることになる場合には、次のステップは、ステップA9になる。ところが、物品が、そのクラスシグネチャの測定によって認証されることになる場合には、次のステップは、ステップA10になる。PC 34は、どちらのステップがステップA8に続くかを判定するようにプログラムされる。
【0097】
ステップA9は、クラスシグネチャを保管するステップである。紙の記述に関連するクラスシグネチャ値λpeakを含むレコードが、PC 34によってデータベース40に保管される。データベース40を、光学リーダ装置1からリモートに置くことができ、レコードを、その間の伝送の前にセキュアに暗号化することができる。
【0098】
ステップA10は、クラスシグネチャを検証するステップである。PC 34は、事前定義の誤差マージン内の一致が見つかるまで、λpeakをデータベース40内のすべてのエントリと比較する。次に、PC 34は、一致する紙タイプが見つかる場合に、その紙タイプのレコードエントリ記述を表示する。一致するエントリが見つからない場合には、PC 34は、任意選択として、検索を他のデータベースに拡張しようと努めることができる。任意選択として、一致が使用可能でないことを述べるメッセージを、表示することができる。任意選択として、クラス一致が見つかるか否かに関わりなく、PC 34は、その後、物品を一意に識別することを試みるために、物品からの特性シグネチャが所定の特性シグネチャと一致するかどうかを判定するために分析を実行しようと努めることができる。
【0099】
図10Aに、図1のリーダの光検出器16a...dのうちの単一の光検出器からの生データを示す。このグラフは、点番号n(図2を参照されたい)に対して任意の単位(a.u.)での信号強度Iをプロットしたものである。I=0とI=250との間で変動する、より高いトレースは、光検出器16aからの生信号データである。より低いトレースは、I=50付近にある、マーカー28(図2を参照されたい)から獲得されたエンコーダ信号である。
【0100】
図10Bに、エンコーダ信号を用いる線形化の後の図10Aの光検出器データを示す。さらに、強度の平均が、計算され、強度値から減算されている。したがって、処理済みのデータ値は、0の上下で変動する。
【0101】
図10Cに、特性シグネチャを提供するためのデジタル化の後の図10Bのデータを示す。採用されたデジタル化方式は、すべての正の強度値が値1にセットされ、すべての負の強度値が0にセットされる、シンプルバイナリワン(simple binary one)である。その代わりに、マルチステートデジタル化または多数の他の可能なデジタル化手法のうちのいずれか1つを使用できることを諒解されたい。デジタル化の主な重要な特徴は、単に、同一のデジタル化方式が一貫して適用されることである。
【0102】
図11は、物品の特性シグネチャがスキャンからどのように生成されるかを示す流れ図である。
【0103】
ステップS1は、光検出器のそれぞれでの光強度が、スキャンの全長中に約1msおきに獲得される、データ獲得ステップである。同時に、エンコーダ信号が、時間の関数として獲得される。スキャンモータが、高い度合の線形化精度を有する(例えば、ステッパモータのように)場合に、データの線形化が必要でない場合があることに留意されたい。データは、PIC 30がADC 31からデータをとることによって獲得される。データ点は、リアルタイムでPIC 30からPC 34に転送される。代替案では、データ点を、PIC 30内のメモリに保管し、その後、スキャンの終りにPC 34に渡すことができる。各スキャンで収集される検出器チャネルあたりのデータ点の個数nは、次ではNと定義される。さらに、値ak(i)は、光検出器kからのi番目に保管された強度値と定義され、iは、1からNまで変化する。そのようなスキャンから取得された2つの生データ集合の例を、図10Aに示す。
【0104】
ステップS2では、数値補間を使用してak(i)を局所的に延長かつ縮約し、その結果、エンコーダ遷移が時間的に等間隔になるようにする。これは、モータ速度の局所的変動について訂正する。このステップは、PC 34内で、コンピュータプログラムによって実行される。
【0105】
ステップS3は、任意選択ステップである。実行される場合に、このステップは、時間に関してデータを数値微分する。弱い平滑化関数をデータに適用することが望ましい場合もある。微分は、非常に構造化された表面に有用である場合がある。なぜなら、微分が、相関する(スペックル)寄与に対して、信号からの相関しない寄与を減衰させるように働くからである。
【0106】
ステップS4は、光検出器ごとに、記録された信号の平均値が、N個のデータ点にまたがってとられるステップである。この平均値は、前に言及したアーチファクト信号に対応する。光検出器ごとに、この平均値をすべてのデータ点から減算し、その結果、データが、0強度の回りに分散するようにする。線形化および計算された平均値の減算の後のスキャンデータ集合の例を示す図10Bを参照する。
【0107】
ステップS5では、アナログ光検出器データをデジタル化して、スキャンを表すデジタルシグネチャを計算する。デジタルシグネチャは、次のルールを適用することによって取得される:ak(i)>0は、バイナリ「1」に写像され、ak(i)<=0は、バイナリ「0」に写像される。デジタル化されたデータ集合は、dk(i)と定義され、ここで、iは1からNまで変化する。物品のシグネチャは、有利なことに、説明したばかりの強度データのデジタル化されたシグネチャに加えて、さらなる成分を組み込むことができる。このさらなる任意選択のシグネチャ成分を、これから説明する。
【0108】
ステップS6は、より小さい「サムネイル」デジタルシグネチャが作成される、任意選択ステップである。これは、m個の読みの隣接するグループの平均を一緒にとることによって、または、より好ましくはc個おきのデータ点を選択することによってのいずれかで行われ、ここで、cは、サムネイルの圧縮係数である。後者は、平均化が、不均衡に雑音を増幅する場合があるので好ましい。その後、ステップS5で使用されたものと同一のデジタル化ルールが、縮小されたデータ集合に適用される。サムネイルデジタル化は、tk(i)と定義され、ここで、iは、1〜N/cまで変化し、cは、圧縮係数である。
【0109】
ステップS7は、複数の検出器チャネルが存在する時に適用可能な任意選択ステップである。追加の成分は、光検出器のうちの異なる光検出器から取得された強度データの間で計算される相互相関成分である。2チャネルがある場合に、1つの可能な相互相関係数があり、3チャネルの場合には3つまで、4チャネルの場合には6つまでなどの相互相関係数がある。相互相関係数は、材料タイプのよいインジケータであることがわかっているので、有用である。したがって、相互相関係数を使用して、クラスシグネチャの分析から導出される情報を補強することができる。例えば、所与のタイプのパスポートなどの特定のタイプの文書またはレーザプリンタ用紙について、相互相関係数は、必ず予測可能な範囲内にあると思われる。正規化された相互相関を、ak(i)とal(i)との間で計算することができ、ここで、k≠lであり、kおよびlは、光検出器チャネル番号のすべてにまたがって変化する。正規化された相互相関関数Γは
【0110】
【数1】
【0111】
と定義される。特性シグネチャの検証処理での相互相関関数の使用は、下でさらに説明する。
【0112】
ステップS8は、信号強度分布を示す単純な強度平均値を計算するためのもう1つの任意選択ステップである。これは、異なる検出器の平均値のそれぞれの全体的な平均値、または、ak(i)の二乗平均平方根(rms)値などの、検出器ごとの平均値とすることができる。検出器が、上で説明したリーダのように垂直入射の両側で対に配置されている場合に、検出器の対ごとの平均値を使用することができる。強度値は、サンプルの全体的な反射率および粗さを単純に示すので、材料タイプに関するよい粗フィルタであることがわかっている。例えば、強度値として、平均値すなわち直流バックグラウンドの除去の後の正規化されていないrms値を使用することができる。
【0113】
物品のスキャンから取得されたシグネチャデータは、検証のためにシグネチャデータベースに保持されたレコードと比較することができ、かつ/または、既存データベースを拡張するためにシグネチャの新しいレコードを追加するためにデータベースに書き込むことができる。
【0114】
新しいデータベースレコードには、ステップS5で取得されるデジタルシグネチャならびに、任意選択として、光検出器チャネルごとにステップS6で取得される、そのより小さいサムネイル版、ステップS7で取得される相互相関係数、およびステップS8で取得される1つまたは複数の平均値が含まれる。代替案では、サムネイルを、迅速な検索のために最適化されたそれ自体の別々のデータベースに保管することができ、残りのデータ(サムネイルを含む)を主データベースに保管することができる。
【0115】
図12は、スキャンから取得された物品の特性シグネチャを所定の特性シグネチャデータベースに対してどのように検証できるかを示す流れ図である。
【0116】
単純な実施態様では、データベースを単純に検索して、特性シグネチャデータの集合全体に基づいて一致を見つけることができる。しかし、検証プロセスを高速化するために、このプロセスは、これから説明するように、より小さいサムネイルと、計算された平均値および相互相関係数に基づく事前スクリーニングとを使用することが好ましい。
【0117】
検証ステップV1は、検証プロセスの第1ステップであり、上で説明したプロセスに従って物品をスキャンすることすなわちスキャンステップS1からS8までを実行することである。
【0118】
検証ステップV2では、サムネイルエントリのそれぞれをとり、これとtk(i+j)との間の一致するビットの数を評価する。ここで、jは、スキャンされた区域の配置の誤差について補償するために変更されるビットオフセットである。jの値が、判定され、その後、一致するビットの最大個数を与えるサムネイルエントリが判定される。これが、さらなる処理に使用される「ヒット」である。
【0119】
検証ステップV3は、レコードについて保管された完全なデジタルシグネチャをスキャンされたデジタルシグネチャに対して分析する前に実行される、任意選択の事前スクリーニングテストである。この事前スクリーニングでは、スキャンステップS8で取得されたrms値を、ヒットのデータベースレコード内の対応する保管された値と比較する。「ヒット」は、それぞれの平均値が事前定義の範囲内で一致しない場合に、さらなる処理から外される。その場合に、物品は、検証されないものとして拒絶される(すなわち、検証ステップV6にジャンプし、失敗の結果を発行する)。
【0120】
検証ステップV4は、完全なデジタルシグネチャを分析する前に実行される、もう1つの任意選択の事前スクリーニングテストである。この事前スクリーニングでは、スキャンステップS7で取得された相互相関係数が、ヒットのデータベースレコード内の対応する保管された値と比較される。「ヒット」は、それぞれの相互相関係数が事前定義の範囲内で一致しない場合に、さらなる処理から外される。その場合に、物品は、検証されないものとして拒絶される(すなわち、検証ステップV6にジャンプし、失敗の結果を発行する)。任意選択として、事前スクリーニングを、物品のクラスシグネチャの結果に基づくものとすることができる。
【0121】
検証ステップV5は、スキャンステップS5で取得されるスキャンされたデジタルシグネチャと、ヒットのデータベースレコード内の対応する保管された値との間の主比較である。完全な保管されたデジタル化されたシグネチャdkdb(i)が、k個の検出器チャネル上のq個の隣接するビットのn個のブロックに分割される、すなわち、1ブロックあたりqk個のビットがある。qの通常の値は、4であり、kの通常の値は、4であり、通常は1ブロックあたり16ビットになる。次に、qk個のビットが、保管されたデジタルシグネチャdkdb(i+j)内のqk個の対応するビットと突き合わされる。このブロック内の一致するビットの個数が、ある事前定義の閾値zthresh以上である場合に、一致するブロックの個数を増分する。zthreshの通常の値は、13である。これを、n個のすべてのブロックについて繰り返す。一致するブロックの最大個数が見つかるまで、このプロセス全体を、jの異なるオフセット値について繰り返して、スキャンされた区域の配置の誤差について補償する。Mを一致するブロックの最大個数と定義すると、偶然の一致の確率は、
【0122】
【数2】
【0123】
を評価することによって計算される。ここで、sは、任意の2つのブロックの間の偶然の一致の確率であり(zthresholdの選択された値に依存する)、Mは、一致するブロックの個数であり、p(M)は、M個以上のブロックが偶然に一致する確率である。sの値は、例えば紙文書の複数のスキャンなど、類似する材料の異なる物体のスキャンからのデータベース内のブロックを比較することによって決定される。q=4、k=4、およびzthreshold=13の場合に、本発明人は、sの通常の値が0.1であることを見つける。qk個のビットが、完全に独立である場合に、確率理論は、zthreshold=13についてs=0.01を与えるはずである。本発明人が経験的により大きい値を見つけたという事実は、k個の検出器チャネルの間の相関と、有限のレーザスポット幅に起因するブロック内の隣接ビット間の相関とのゆえである。1枚の紙の通常のスキャンは、その紙のデータベースエントリと比較された時に、合計510個のブロックのうちの約314個の一致するブロックを生じる。上の式についてM=314、n=510、およびs=0.1をセットすることによって、10-177という偶然の一致の確率が与えられる。
【0124】
検証ステップV6は、この検証プロセスの結果を発行する。検証ステップV5で取得された確率結果を合否テストで使用することができ、この合否テストでは、基準点が、事前定義の確率閾値である。この場合に、確率閾値は、システムによってあるレベルにセットされるものとすることができ、あるいは、ユーザによって選択されたレベルにセットされた変数パラメータとすることができる。代替案では、確率結果を、確率自体としての生の形で、または関連する用語(例えば、一致なし/悪い一致/よい一致/優秀な一致)もしくは他の分類を使用する変更された形のいずれかで、信頼水準としてユーザに出力することができる。
【0125】
多数の変形が可能であることを諒解されたい。例えば、事前スクリーニング構成要素として相互相関係数を扱うのではなく、相互相関係数を、デジタル化された強度データと一緒に、主シグネチャの一部として扱うことができる。例えば、相互相関係数/クラスシグネチャを、デジタル化し、デジタル化された強度データに追加することができる。相互相関係数/クラスシグネチャを、それ自体でデジタル化し、ビットストリングまたは類似物を生成するのに使用することもでき、次に、このビットストリングまたは類似物を、ヒットを見つけるために、デジタル化された強度データのサムネイルについて上で説明したものと同一の形で検索することができる。
【0126】
上の例は、物品が1方向でのみスキャンされる直線スキャナに関連した。そのようなスキャナでは、物品、または、より具体的には痕跡パターンが、制御され再生可能な形で位置合せされる必要がある。すべての可能な方向をスキャンすることによってこの制限を克服する回転スキャナを、これから説明する。
【0127】
図13Aに、紙またはボール紙から作られた物品からのクラスシグネチャを判定する回転スキャン装置で使用される回転スキャナ100を示す。スキャナ100には、ハウジング110に回転可能に取り付けられたスキャンヘッド102が含まれる。スキャンヘッド102は、位置エンコーダモジュール106に隣接する回転する腕104に取り付けられる。この回転する腕は、駆動モータ108に動作可能に結合される。
【0128】
図13Bに、図13Aに示された回転スキャナ100のハウジング110にはまるリッド120を示す。リッド120には、円弧状のスロット124をその中に画定された平らな面部分122が含まれる。円弧状のスロット124は、360°から角度126を引いた角度に対する。この実施形態では、円弧状のスロット124は、270°の角度に対する。これは、スキャンヘッド102が、円弧の約270°にわたってスキャンし、したがって、紙のすべての可能な方位をサンプリングすることを可能にする。
【0129】
図13Aおよび13Bに示された回転スキャン装置は、前に説明した直線スキャン装置に似たスキャンシステムに組み込むことができる。この場合に、直線スキャン装置感知システムは、図13Aおよび図13Bの回転版に置換され、データ処理装置は、図14に関して下で説明する方法を実施するように再プログラムされる。
【0130】
この実施形態の2つの主要な利点がある。第1に、紙とスキャナとの相対方位を知る必要がない。なぜなら、スペクトルの観察された集合と紙タイプのデータベースとの間のあてはめを、一致が取得されるまで、異なる開始角度について行うことができるからである。これは、スキャナを、紙表面上のどこにでも降ろすことができ、クラスシグネチャを報告できることを意味する。第2に、より高いレベルのセキュリティが実現される。なぜなら、クラスシグネチャを、異なるスキャン方向からとられる特徴の組合せから構成することができるからである。例えば、クラスシグネチャを形成するデータ点の変換された集合を使用して、長方形メッシュ構造の2つの別個の周期性を見分けることができる。もう1つの例は、所与の周期性の六角形メッシュを識別し、これを同一周期性の正方形メッシュから区別するなど、メッシュの回転対称性の次数を判定することであるはずである。
【0131】
図14Aおよび14Bに、一緒に、クラスシグネチャが、どのようにして回転スキャンを使用して物品から測定され、認証または記録されるかを示す流れ図を示す。
【0132】
ステップR1は、スキャンモータが始動される最初のステップである。スキャンモータは、速度vで移動するようにプログラムされる。
【0133】
ステップR2は、光検出器のそれぞれでの光強度が、スキャンの全長中に約1msおきに獲得される、データ獲得ステップである。サンプル点の間の時間間隔は、Δtである。同時に、エンコーダ信号が、時間の関数として獲得される。スキャンモータが、高い度合の線形化精度を有する(例えば、ステッパモータのように)場合に、エンコーダ信号を獲得する必要がないことに留意されたい。エンコーダ信号は、位置エンコーダモジュール106がスロット124に隣接するリッド120に設けられたマーキングを通る時を検出することによって供給することができる。データは、PIC 30がADC 31からデータをとることによって獲得される。データ点は、リアルタイムでPIC 30からPC 34に転送される。代替案では、データ点を、PIC 30内のメモリに保管し、その後、スキャンの終りにPC 34に渡すことができる。各スキャンで収集される検出器チャネルあたりのデータ点の個数nは、次ではNと定義される。さらに、値ak(i)は、光検出器kからのi番目に保管された強度値と定義され、iは、1からNまで変化する。
【0134】
ステップR3は、スキャンヘッドを戻すステップである。スキャンモータを逆転して、後続のスキャン動作に備えてスキャン機構をその初期位置にリセットする。
【0135】
ステップR4は、任意選択の線形化ステップである。実行される場合に、このステップは、局所的に延ばされ、縮められたak(i)に数値補間を適用し、その結果、エンコーダ遷移が時間的に等間隔になるようにする。これによって、モータ速度の局所的変動についてデータ点の集合が訂正される。このステップは、PC 34内で、コンピュータプログラム制御の下で実行される。
【0136】
ステップR5は、i0に0をセットする初期化ステップである。
【0137】
ステップR6は、データ点の部分集合がスキャン全体から作成されるステップである。I=i0-ΔIからi0+ΔIまで変化するak(i)の部分集合bk(i)が作成される。上で図8Bに関して示したように、ΔIは、スキャナの円弧の約10°に対応しなければならない。
【0138】
ステップR7は、bk(i)のフーリエ変換のFT振幅スペクトルBk(i)が計算されるFTステップである。このステップは、データ点のk個の集合の個々への高速フーリエ変換(FFT)の適用によって、PC 34内でコンピュータプログラム制御の下で実行される。任意選択として、複数の検出器がスキャンヘッド102内に設けられる場合に、平均をとられたFT振幅スペクトルを、k個の個々の振幅スペクトルのそれぞれから計算することができる。各変換に使用されるデータのより短いシーケンスのゆえに、FTピークは、直線スキャンのFTピークより幅広く、より強度が小さい。それでも、ある種の条件の下で、スペクトルの集合は、紙のよいクラスシグネチャを形成する。
【0139】
ステップR8は、i=0(直流成分)を除いて、Bk(i)を最大にするiの値を識別する識別ステップである。このインデックスipeakは、PC 34内でコンピュータプログラム制御の下で識別される。
【0140】
ステップR9は、Bk(i)の二乗平均平方根(r.m.s.)値が判定されるステップである。
【0141】
【数3】
【0142】
を使用してBk(i)のr.m.s.値を計算する。所与の角度スキャンφについて、振幅スペクトル内の最大ピーク高を見つけ、これを振幅スペクトルのr.m.s.値によって除算する。この比を、ピーク重み(peak significance)と呼ぶ。なぜなら、この比が、ピークがスペクトルの残りよりどれほど大きいかを示すからである。約3から4未満のピーク重みは、明瞭に画定されたピークがないことを意味する。約4を超えるピーク重みは、明確に画定されたピークを示す。ピーク重みが約3から4を超える場合には、ピークの中央の波長を測定する。ピーク重みが約3から4未満である場合には、そのデータを破棄し、φの次の値に進む。したがって、φに対するピーク波長の、円弧のうちで明確に画定されたピークが存在する部分に限定されたグラフをプロットすることができる。このプロットは、そのスキャンされた紙のクラスシグネチャを形成する。
【0143】
図8Aに、1枚の紙からの実際の測定に関する、振幅スペクトルのr.m.s.値に対する振幅スペクトルの最大ピークの振幅の比を示す。明らかに重要なピークを、0°から15°までの角度範囲内に見ることができ、より弱いピークが、約45°および約90°に現れている。0°に近い最大ピークに焦点を合わせて、図8Bに、角度の関数としてのこのピークの波長を示す。408μmというほぼ一定の波長が見つかり、これが、この1枚の紙のクラスシグネチャを形成する。図8Bで見ることができる、角度に対する波長の依存性でのわずかに上向きの曲率は、スキャン方向が変換する時の波長のl/cos(角度)投影に起因する。
【0144】
ステップR10は、比判定ステップである。比B(ipeak/rms)を計算し、保管する。
【0145】
ステップR11は、i0を増分する増分ステップである。
【0146】
ステップR12は、i0=NになるまでステップR6をもう一度実行させる、ループテストステップである。i0=Nの場合には、ステップR13が実行される。
【0147】
ステップR13は、比B(ipeak/rms)を最大にするi0の値ipeakを判定する、大域ピークデータ点判定ステップである。
【0148】
ステップR14は、ipeakに関連する波長が、PC 34内で式λpeak=2π/(ipeak×vΔt)に従って判定される、計算ステップである。ピーク波長λpeakは、その後、クラスシグネチャとして使用される。
【0149】
ステップR15は、判断点である。物品が、そのクラスシグネチャを記録されることになる場合には、次のステップは、ステップR16になる。ところが、物品が、そのクラスシグネチャの測定によって認証されることになる場合には、次のステップは、ステップR17になる。PC 34は、どちらのステップがステップR15に続くかを判定するようにプログラムされる。
【0150】
ステップR16は、クラスシグネチャを保管するステップである。紙の記述に関連するクラスシグネチャ値λpeakを含むレコードが、PC 34によってデータベース40に保管される。データベース40を、光学リーダ装置1からリモートに置くことができ、レコードを、その間の伝送の前にセキュアに暗号化することができる。
【0151】
ステップR17は、クラスシグネチャを検証するステップである。PC 34は、事前定義の誤差マージン内の一致が見つかるまで、λpeakをデータベース40内のすべてのエントリと比較する。次に、PC 34は、一致する紙タイプが見つかる場合に、その紙タイプのレコードエントリ記述を表示する。一致するエントリが見つからない場合には、PC 34は、任意選択として、検索を他のデータベースに拡張しようと努めることができる。任意選択として、一致が使用可能でないことを述べるメッセージを、表示することができる。任意選択として、クラス一致が見つかるか否かに関わりなく、PC 34は、その後、物品を一意に識別することを試みるために、物品からの特性シグネチャが所定の特性シグネチャと一致するかどうかを判定するために分析を実行しようと努めることができる。
【0152】
図15は、本発明の実施形態による装置がどのように動作するかを示す流れ図である。
【0153】
ステップA1は、このプロセスの開始である。このプロセスは、PC 34の制御の下にある。
【0154】
ステップA2は、分析される物品を読取体積内に位置決めするステップである。このステップは、手動でまたは自動的に実行することができる。例えば、シートフィーダーを使用して、紙/ボール紙物品を装置読取体積内に位置決めすることができ、あるいは、ハンドヘルドスキャナを物品に置くことができる。
【0155】
ステップA3は、物品をスキャンするステップである。一実施形態で、これには、直線スキャンを使用して物品に関してビームを移動することが用いられる。しかし、本明細書で説明したタイプの回転スキャンを使用して、このステップを実行することができる。
【0156】
ステップA4は、読取体積に関してスキャン位置を測定するステップである。スキャンの時間期間にわたるスキャナの位置に関する情報が、記録される。このステップは、スキャンの進行中に、PIC 30を介してエンコーダ/デコーダ19からデータを読み取ることによって、PC 34がスキャナ位置を監視することによって実行される。
【0157】
ステップA5は、データ点の集合が順次取り込まれるデータ収集ステップである。検出器16a〜dからのデータ点の各集合は、PC 34によって平均をとられ、データ点の平均をとられた集合として保管される。
【0158】
ステップA6は、線形化ステップである。PCは、集合内の連続するデータ点が、スキャン中の獲得の時刻または位置に関して等間隔であることを保証するために、ステップA4で取得された相対的な測定された位置情報を使用してデータ点の集合を変更することによって、クラスシグネチャを判定する前にデータ点の集合を線形化する。
【0159】
ステップA7は、変換ステップである。PC 34は、データ点の平均をとられた集合に高速フーリエ変換(FFT)を適用する。FFTまたは他の変換を使用して、1つまたは複数のピークを含む変換されたデータ集合をもたらすことができる。
【0160】
ステップA8は、クラスシグネチャの判定を含む。ステップA7で見つかった変換の振幅ピークを閾値処理して、デジタル信号を導出する。このデジタル信号が、クラスシグネチャとして使用される。
【0161】
ステップA9は、比較ステップである。クラスシグネチャを、データベース40に保管された所定のクラスシグネチャのデータベースと比較する。
【0162】
ステップA10は、判断ステップである。クラスシグネチャの一致がデータベース40内で見つからない場合には、この装置はステップA11に進む。そうではなく、一致がクラスシグネチャに関して見つかる場合には、この装置は、特性シグネチャを検証するためにステップA12の実施に進む。
【0163】
ステップA11は、この装置が、物品のクラスシグネチャが認識されなかったことをこの装置のオペレータに警告することができる拒絶ステップである。オペレータは、その後、この通知にどのように取り組むかを判断することができる。
【0164】
ステップA12は、特性シグネチャを判定するステップである。このステップには、上で説明したものなどの特性シグネチャを判定するステップを含めることができる。しかし、測定された特性シグネチャと比較するためにデータベース内のすべての特性シグネチャをデータベース40から検索する前に、PC 34は、所定の特性シグネチャのうちで検索される部分集合を選択することができる。これは、測定された特性シグネチャとの一致に関する検索を高速化する。さらに、この実施形態では、この装置が、スキャン中に取得されたデータ点の同一の集合を使用して、クラスシグネチャと特性シグネチャとの両方を導出することができる。
【0165】
ステップA13は、もう1つの判断ステップである。特性シグネチャに関する一致がデータベース40内で見つからない場合に、この装置は、上で説明したステップA11に進む。
【0166】
ステップA14は、クラスシグネチャと特性シグネチャとの両方が認識される場合に達するステップである。このステップでは、様々な表示またはアクションが発生し得る。例えば、望み通りに、紙/ボール紙物品が有効に識別されたことの表示を、装置のオペレータに表示することができ、自動ロックリリースを作動させることなどができる。
【0167】
上の詳細な説明から、紙またはボール紙などの材料から作られた物品を、その材料をコヒーレント放射にさらすことと、その材料からのコヒーレント放射の散乱を測定するデータ点の集合を収集することと、データ点の集合から物品のクラス/特性シグネチャを判定することとによって、どのように識別できるかが理解される。
【0168】
また、スキャン区域が、そのサイズまたは物品の位置に関して本質的に任意であることが理解される。望まれる場合に、スキャンを、例えばより大きい2次元区域をカバーするためにラスタ化された直線スキャンとすることができる。
【0169】
さらに、物品をコヒーレント放射にさらすことと、物品の固有構造からのコヒーレント放射の散乱を測定するデータ点の集合を収集することと、データ点の集合から製品のクラス/特性シグネチャを判定することとによって、これを、パッケージングによる製品の識別、文書、または衣類の正札付きの品目の識別にどのように適用できるかが理解される。
【0170】
数値処理の上の説明から、ビーム位置の劣化(例えば、コヒーレントビームの準最適集光のゆえの読取体積でのビーム断面の拡大)が、このシステムにとって破滅的であるのではなく、偶然の一致の確率が高まることによってその性能が低下するだけであることを理解されたい。したがって、この装置は、装置変動に対して堅牢であり、突然の不安定な故障ではなく、性能の安定した漸進的劣化を与える。どの場合でも、応答データの特性最小特徴サイズを確かめるために収集されたデータに対して自己相関を実行することによって、リーダの自己テストを実行することは単純であり、これによって、すべての機器の問題が見つかる。
【0171】
例えば、紙またはボール紙に適用できるさらなるセキュリティ手段が、スキャンされる区域に透明シール(例えば、粘着テープ)を粘着によって接着することである。粘着は、特性シグネチャ検証スキャンを実行するために保存が必須である、下にある表面特徴がその除去によって破壊されるのに十分に強くなるように選択される。
【0172】
上で説明したように、このリーダは、特に本発明を実施するように設計された装置内で実施することができる。他の場合に、このリーダは、写真複写機機械、文書スキャナ、文書管理システム、POSデバイス、ATM、航空機チケット搭乗券リーダ、または他のデバイスなど、別の機能性を念頭において主に設計された装置に適当な補助構成要素を追加することによって設計される。
【0173】
図16Aから16Gに、本発明の様々な実施形態による注文仕立てのスクリーンを示す。このスクリーンは、標準的な製紙プロセスで使用することができる。痕跡を、所望のクラスシグネチャをもたらすために提供することができる。そのような痕跡は、1次元または2次元のパターン変形を組み込むことができる。刻印されるパターンは、スキャナがパターンの所望の周波数成分を検出することを保証するために、スキャンの長さ以下の周期性を有する周期的なものとすることができる。
【0174】
これらの注文仕立てのスクリーンを使用して、標準的な製紙スクリーンを置換することができる。
【0175】
スクリーンを作る様々な技法および材料は、当技術分野で周知であり(例えば、参考文献[6]から[13]を参照されたい)、これらを、注文仕立てのスクリーンに使用することもできる。例えば、スクリーンを、ステンレス鋼、ポリマ材料などから形成される、ワイヤ、板などを使用して作ることができる。
【0176】
図16Aに、本発明の実施形態による注文仕立てのスクリーン160を示す。注文仕立てのスクリーン160には、第1方向(y軸)で規則的な間隔163で間隔をあけられたワイヤ161a〜nのグリッドが含まれる。規則的な間隔をおかれた個々のワイヤ162a〜nの間隔をあけられたグループが、第1方向に横向きの第2方向(x軸)で規則的な間隔164で設けられる。したがって、このスクリーン160によって残される痕跡は、第1方向で単一の周波数成分を有する。これらの痕跡は、第2方向で第2周波数成分も有する。第1成分は、ワイヤ164のグループの間隔を反映し、第2成分は、ワイヤ間間隔165を反映する。
【0177】
図16Bに、本発明の実施形態による注文仕立てのスクリーン170を示す。注文仕立てのスクリーン170には、第1方向(y軸)で規則的な間隔173で間隔をあけられたワイヤ171a〜nのグリッドが含まれる。ワイヤ172a〜nの間隔をあけられたグループが、第1方向に横向きの第2方向(x軸)で規則的な間隔174で設けられる。第2方向で設けられるワイヤ172a〜nのグループは、グループ内の個々のワイヤの間の間隔が線形に増加するchirpedパターンに従って間隔をあけられる。
【0178】
したがって、このスクリーンによって残される痕跡は、第1方向で単一の周波数成分を有する。これらの痕跡は、グループ172a〜n内のワイヤに適用されたchirped空間変調に由来する第2方向の拡散周波数信号ならびに第2方向のグループの間の間隔174から導出される周波数成分をも有する。
【0179】
図16Cに、本発明の実施形態による注文仕立てのスクリーン180を示す。注文仕立てのスクリーン180には、第1方向(y軸)で規則的な間隔で間隔をあけられたワイヤ181a〜nのグリッドが含まれる。ワイヤ182a〜nの様々なグループが、第1方向に横向きの第2方向(x軸)で規則的な間隔184で設けられる。1つのそのようなグループが置かれている可能性がある場所で、この例では、ワイヤのより密にパックされたグループを組み込んだグループ182cが設けられる。
【0180】
このスクリーンによって残される痕跡は、第1方向で単一の周波数成分を有する。これらの痕跡は、第2方向で3成分の周波数信号をも有する。第1成分は、ワイヤ184のグループの間隔を反映し、第2成分は、ワイヤ間間隔を反映する。しかし、第3成分も、第1成分より高い周波数に存在する。第3成分は、グループ182c内のワイヤのより密なパッキングに由来する。
【0181】
第3周波数成分を検出することによって、グループ182cの間隔を有するワイヤのグループの紙製造中の使用を検出することができる。これを使用して、バイナリ信号をエンコードすることができる。他のグループワイヤ間間隔も、バイナリ桁またはバイトのシーケンスのエンコードを可能にするために設けることができる。周知の通り、そのようなバイトを使用して、様々な情報をエンコードすることができる。
【0182】
図16Dに、本発明の実施形態による注文仕立てのスクリーン190を示す。注文仕立てのスクリーン190には、第1方向(y軸)で規則的な間隔193で間隔をあけられたワイヤ191a〜nのグリッドが含まれる。ワイヤ192a〜nの間隔をあけられたグループが、第1方向に横向きの第2方向(x軸)で規則的な間隔194で設けられる。このグループ内のワイヤ192a〜nは、正弦波的に変化するパターンに従って間隔をあけられる。
【0183】
このスクリーンによって残される痕跡は、第1方向で単一の周波数成分を有する。これらの痕跡は、第2方向で、グループ192a〜n内のワイヤに適用された正弦波空間変調に由来する拡散周波数信号をも有する。様々な実施形態で、正弦波空間変調は、様々なエンコーディング方式を提供するためにそれ自体を変調できる搬送波周波数として働く。例えば、ワイヤを適当に間隔をあけることによって、位相偏移キーイング変調を、この搬送波正弦波に適用し、紙に適用されるパターンにエンコードすることができる。
【0184】
図16Eに、本発明の実施形態による注文仕立てのスクリーン200を示す。注文仕立てのスクリーン200には、第1方向(y軸)で規則的な間隔203で間隔をあけられたワイヤ201a〜nのグループのグリッドが含まれる。グループ内のワイヤ201a〜n自体は、規則的な間隔206で間隔をあけられる。規則的に間隔をあけられたワイヤ202a〜nの間隔をあけられたグループも、第1方向に横向きの第2方向(x軸)で規則的な間隔204で設けられる。
【0185】
このスクリーン200によって残される痕跡は、第1方向の2つの周波数成分および第2方向の2つの周波数成分を有する。第1方向の第1成分は、ワイヤ201a〜nのグループの間隔203を反映し、第2成分は、ワイヤ間間隔206を反映する。第2方向の第1成分は、ワイヤ202a〜nのグループの間隔204を反映し、第2成分は、ワイヤ間間隔205を反映する。
【0186】
図16Fに、本発明の実施形態による注文仕立てのスクリーン210を示す。注文仕立てのスクリーン210には、規則的な2次元パターンで間隔をあけられた複数の十字形パーフォレーション202を含む板201が含まれる。そのようなスクリーンは、シート材料のエッチングまたは押抜きによって形成することができる。
【0187】
図16Gに、本発明の実施形態による注文仕立てのスクリーン220を示す。注文仕立てのスクリーン220には、規則的な2次元パターンで間隔をあけられたパーフォレーション222および224の繰り返すパターンを含む板221が含まれる。パターンには、規則的な間隔223で間隔をあけられたグリッド配置に並べられた、異なるサイズおよび個数の円形パーフォレーション222および224の交番するグループの繰り返すシーケンスが含まれる。円形パーフォレーション222の第1グループは、一緒にグループ化された円形穴の3×3アレイからなる。円形パーフォレーション224の第2グループは、一緒にグループ化された円形穴の2×2アレイからなる。第1および第2のグループ222および224は、板221のほぼ同一の表面積を占める。
【0188】
スクリーン220によって残される痕跡は、グリッド間隔223に由来する周波数成分と、パーフォレーション222および224のグループから生じるより複雑な応答とを有する。そのような応答を測定し、使用して、注文仕立てのスクリーン220を使用して作られた紙/ボール紙物品のクラスシグネチャを提供することができる。
【0189】
図示のスクリーンによって作られる痕跡のすべてが、フーリエ変換または他の種類の変換分析を使用してクラスシグネチャを判定する機能的分析に基づいて分析できることを諒解されたい。
【0190】
本発明の特定の実施形態を説明したが、本発明の趣旨および範囲の中で、多数の変更/追加および/または置換を行えることを諒解されたい。
【0191】
(参考文献)
[1] Kravolec "Plastic tag makes foolproof ID" Technology Research News, 2 October 2002
[2] R Anderson "Security Engineering: a guide to building dependable distributed systems" Wiley 2001, pages 251-252 ISBN 0-471-38922-6
[3] US 5,521,984
[4] US 5,325,167
[5] GB 0405641.2 (未公開であるが、引用によりその内容が本明細書に組み込まれる。)
[6] US 4,564,051
[7] US 6,546,964
[8] US 4,546,964
[9] US 5,152,326
[10] US 5,358,014
[11] US 6,546,964
[12] US 2004/0011491
[13] WO 2004/020734
【符号の説明】
【0192】
1 リーダ装置
10 読取アパーチャ
12 ハウジング
14 レーザ源
15 コヒーレントレーザビーム
16a 光検出器要素
16b 光検出器要素
16c 光検出器要素
16d 光検出器要素
18 円柱レンズ
19 フォトトランジスタ
20 サブアセンブリ
22 駆動モータ
24 ベアリング
【特許請求の範囲】
【請求項1】
読取体積内に置かれた紙またはボール紙から作られた物品を分析するように配置された装置(1)であって、
細長い焦点を有する細長いコヒーレント光ビーム(15)を用いて物品をスキャンするように配置され、前記細長い焦点の長軸に横向きの方向で前記物品を直線的にスキャンするように配置されたスキャナと、
各検出器が前記細長いコヒーレントビームによって提供された励起区域より大きい区域に亘って散乱された光信号を受け入れることができると共に、各検出器が前記読取体積の実質的に同じ位置から散乱された光信号を検出できるように配置された、複数の検出器を備え、前記細長いコヒーレントビームが前記読取体積から反射する時に取得される信号からデータ点の集合を収集するように配置された検出器配置(16)と、
前記物品が前記物品の固有の表面構造の特性から既知の包括的タイプの物品を識別する所定のクラスシグネチャを生じさせる前記固有の表面構造を有するかどうかを判定するために、データ点の前記集合を処理するように配置されたデータ獲得および処理モジュール(36)とを含み、
前記データ点が、前記読取体積の異なる部分からの散乱に関連し、前記データ点のうちの異なるデータ点が、前記読取体積のスキャン中の異なる時刻に取得された信号に関連する
ことを特徴とする装置。
【請求項2】
前記データ獲得および処理モジュールが、データ点の前記集合が前記物品の前記固有特性内の周期的変動を示すクラスシグネチャ情報を含むかどうかを判定するためにデータ点の前記集合を分析するように動作可能であることを特徴とする請求項1に記載の装置。
【請求項3】
前記データ獲得および処理モジュールが、前記データ点に適用される数学的変換の結果から、測定されたクラスシグネチャを導出し、前記測定されたクラスシグネチャを1つまたは複数の所定のクラスシグネチャと比較するように動作可能であり、前記測定されたクラスシグネチャと所定のクラスシグネチャとの間の一致が、前記物品が前記一致した所定のクラスシグネチャに関連する前記包括的タイプの物品であることを示すことを特徴とする請求項1または2に記載の装置。
【請求項4】
前記スキャン中の前記コヒーレントビームと前記物品との相対位置を測定するエンコーダ/検出器モジュールをさらに含み、前記データ獲得および処理モジュールが、さらに、前記集合内の連続するデータ点が前記スキャン中の前記連続するデータ点の獲得の時刻または位置に関して等間隔であることを保証するために、データ点の前記集合を変更するために前記エンコーダ/検出器モジュールから取得された相対的に測定された位置情報を使用することによって、クラスシグネチャを判定する前にデータ点の前記集合を線形化するように動作可能であることを特徴とする請求項1から3のいずれかに記載の装置。
【請求項5】
前記データ獲得および処理モジュールが、さらに、データ点の前記集合から特性シグネチャを判定するように動作可能であり、前記特性シグネチャが、個々の物品を同一の包括的タイプの他の物品から区別するためのものであることを特徴とする請求項1から4のいずれかに記載の装置。
【請求項6】
前記物品の前記固有特性が、通常の製造プロセス中に前記紙またはボール紙に分け与えられる痕跡であることを特徴とする請求項1から5のいずれかに記載の装置。
【請求項7】
前記スキャナが、垂直に近い入射で前記物品に向かって前記コヒーレントビームを投影するように構成されることを特徴とする請求項1から6のいずれかに記載の装置。
【請求項8】
紙またはボール紙から作られた物品を分析する方法であって、前記方法が、
物品を読取体積内に置くことと、
細長い焦点を有する細長いコヒーレント光ビーム(15)を用いて前記物品をスキャンし、前記物品が、前記細長い焦点の長軸に横向きの方向で直線的にスキャンされることと、
各検出器が前記細長いコヒーレントビームによって提供された励起区域より大きい区域に亘って散乱された光信号を受け入れると共に、各検出器が前記読取体積の実質的に同じ位置から散乱された光信号を検出できるように配置された、複数の検出器を備える検出器配置を用いて、前記コヒーレントビームが前記読取体積から反射する時に取得される信号からデータ点の集合を収集することと、
前記物品が前記物品の固有の表面構造の特性から既知の包括的タイプの物品を識別する所定のクラスシグネチャを生じさせる前記固有の表面構造を有するかどうかを判定するために、データ点の前記集合を処理することとを含み、
前記データ点が、前記読取体積の異なる部分からの散乱に関連し、前記データ点のうちの異なるデータ点が、前記読取体積のスキャン中の異なる時刻に取得された信号に関連する
ことを特徴とする方法。
【請求項9】
データ点の前記集合を処理することが、データ点の前記集合が前記物品の前記固有特性内の周期的変動を示すクラスシグネチャ情報を含むかどうかを判定するためにデータ点の前記集合を分析することを含むことを特徴とする請求項8に記載の方法。
【請求項10】
データ点の前記集合を処理することが、前記データ点に適用される数学的変換の結果から、測定されたクラスシグネチャを導出することと、前記測定されたクラスシグネチャを1つまたは複数の所定のクラスシグネチャと比較することとを含み、前記測定されたクラスシグネチャと所定のクラスシグネチャとの間の一致が、前記物品が前記一致した所定のクラスシグネチャに関連する前記包括的タイプの物品であることを示すことを特徴とする請求項8または9に記載の方法。
【請求項11】
前記スキャン中の前記コヒーレントビームと前記物品との相対位置を測定することと、
前記集合内の連続するデータ点が前記スキャン中の前記連続するデータ点の獲得の時刻または位置に関して等間隔であることを保証するために、データ点の前記集合を変更するために前記相対的な測定された位置情報を使用することによって、クラスシグネチャを判定する前にデータ点の前記集合を線形化することと
をさらに含むことを特徴とする請求項8から10のいずれか一項に記載の方法。
【請求項12】
データ点の前記集合から特性シグネチャを判定するためにデータ点の前記集合を処理することをさらに含み、前記特性シグネチャが、個々の物品を同一の包括的タイプの他の物品から区別するためのものであることを特徴とする請求項8から11のいずれか一項に記載の方法。
【請求項13】
前記物品の前記固有特性が、通常の製造プロセス中に前記紙またはボール紙に分け与えられる痕跡であることを特徴とする請求項8から12のいずれか一項に記載の方法。
【請求項14】
垂直に近い入射で前記物品に向かって前記コヒーレントビームを投影することを含むことを特徴とする請求項8から13のいずれか一項に記載の方法。
【請求項1】
読取体積内に置かれた紙またはボール紙から作られた物品を分析するように配置された装置(1)であって、
細長い焦点を有する細長いコヒーレント光ビーム(15)を用いて物品をスキャンするように配置され、前記細長い焦点の長軸に横向きの方向で前記物品を直線的にスキャンするように配置されたスキャナと、
各検出器が前記細長いコヒーレントビームによって提供された励起区域より大きい区域に亘って散乱された光信号を受け入れることができると共に、各検出器が前記読取体積の実質的に同じ位置から散乱された光信号を検出できるように配置された、複数の検出器を備え、前記細長いコヒーレントビームが前記読取体積から反射する時に取得される信号からデータ点の集合を収集するように配置された検出器配置(16)と、
前記物品が前記物品の固有の表面構造の特性から既知の包括的タイプの物品を識別する所定のクラスシグネチャを生じさせる前記固有の表面構造を有するかどうかを判定するために、データ点の前記集合を処理するように配置されたデータ獲得および処理モジュール(36)とを含み、
前記データ点が、前記読取体積の異なる部分からの散乱に関連し、前記データ点のうちの異なるデータ点が、前記読取体積のスキャン中の異なる時刻に取得された信号に関連する
ことを特徴とする装置。
【請求項2】
前記データ獲得および処理モジュールが、データ点の前記集合が前記物品の前記固有特性内の周期的変動を示すクラスシグネチャ情報を含むかどうかを判定するためにデータ点の前記集合を分析するように動作可能であることを特徴とする請求項1に記載の装置。
【請求項3】
前記データ獲得および処理モジュールが、前記データ点に適用される数学的変換の結果から、測定されたクラスシグネチャを導出し、前記測定されたクラスシグネチャを1つまたは複数の所定のクラスシグネチャと比較するように動作可能であり、前記測定されたクラスシグネチャと所定のクラスシグネチャとの間の一致が、前記物品が前記一致した所定のクラスシグネチャに関連する前記包括的タイプの物品であることを示すことを特徴とする請求項1または2に記載の装置。
【請求項4】
前記スキャン中の前記コヒーレントビームと前記物品との相対位置を測定するエンコーダ/検出器モジュールをさらに含み、前記データ獲得および処理モジュールが、さらに、前記集合内の連続するデータ点が前記スキャン中の前記連続するデータ点の獲得の時刻または位置に関して等間隔であることを保証するために、データ点の前記集合を変更するために前記エンコーダ/検出器モジュールから取得された相対的に測定された位置情報を使用することによって、クラスシグネチャを判定する前にデータ点の前記集合を線形化するように動作可能であることを特徴とする請求項1から3のいずれかに記載の装置。
【請求項5】
前記データ獲得および処理モジュールが、さらに、データ点の前記集合から特性シグネチャを判定するように動作可能であり、前記特性シグネチャが、個々の物品を同一の包括的タイプの他の物品から区別するためのものであることを特徴とする請求項1から4のいずれかに記載の装置。
【請求項6】
前記物品の前記固有特性が、通常の製造プロセス中に前記紙またはボール紙に分け与えられる痕跡であることを特徴とする請求項1から5のいずれかに記載の装置。
【請求項7】
前記スキャナが、垂直に近い入射で前記物品に向かって前記コヒーレントビームを投影するように構成されることを特徴とする請求項1から6のいずれかに記載の装置。
【請求項8】
紙またはボール紙から作られた物品を分析する方法であって、前記方法が、
物品を読取体積内に置くことと、
細長い焦点を有する細長いコヒーレント光ビーム(15)を用いて前記物品をスキャンし、前記物品が、前記細長い焦点の長軸に横向きの方向で直線的にスキャンされることと、
各検出器が前記細長いコヒーレントビームによって提供された励起区域より大きい区域に亘って散乱された光信号を受け入れると共に、各検出器が前記読取体積の実質的に同じ位置から散乱された光信号を検出できるように配置された、複数の検出器を備える検出器配置を用いて、前記コヒーレントビームが前記読取体積から反射する時に取得される信号からデータ点の集合を収集することと、
前記物品が前記物品の固有の表面構造の特性から既知の包括的タイプの物品を識別する所定のクラスシグネチャを生じさせる前記固有の表面構造を有するかどうかを判定するために、データ点の前記集合を処理することとを含み、
前記データ点が、前記読取体積の異なる部分からの散乱に関連し、前記データ点のうちの異なるデータ点が、前記読取体積のスキャン中の異なる時刻に取得された信号に関連する
ことを特徴とする方法。
【請求項9】
データ点の前記集合を処理することが、データ点の前記集合が前記物品の前記固有特性内の周期的変動を示すクラスシグネチャ情報を含むかどうかを判定するためにデータ点の前記集合を分析することを含むことを特徴とする請求項8に記載の方法。
【請求項10】
データ点の前記集合を処理することが、前記データ点に適用される数学的変換の結果から、測定されたクラスシグネチャを導出することと、前記測定されたクラスシグネチャを1つまたは複数の所定のクラスシグネチャと比較することとを含み、前記測定されたクラスシグネチャと所定のクラスシグネチャとの間の一致が、前記物品が前記一致した所定のクラスシグネチャに関連する前記包括的タイプの物品であることを示すことを特徴とする請求項8または9に記載の方法。
【請求項11】
前記スキャン中の前記コヒーレントビームと前記物品との相対位置を測定することと、
前記集合内の連続するデータ点が前記スキャン中の前記連続するデータ点の獲得の時刻または位置に関して等間隔であることを保証するために、データ点の前記集合を変更するために前記相対的な測定された位置情報を使用することによって、クラスシグネチャを判定する前にデータ点の前記集合を線形化することと
をさらに含むことを特徴とする請求項8から10のいずれか一項に記載の方法。
【請求項12】
データ点の前記集合から特性シグネチャを判定するためにデータ点の前記集合を処理することをさらに含み、前記特性シグネチャが、個々の物品を同一の包括的タイプの他の物品から区別するためのものであることを特徴とする請求項8から11のいずれか一項に記載の方法。
【請求項13】
前記物品の前記固有特性が、通常の製造プロセス中に前記紙またはボール紙に分け与えられる痕跡であることを特徴とする請求項8から12のいずれか一項に記載の方法。
【請求項14】
垂直に近い入射で前記物品に向かって前記コヒーレントビームを投影することを含むことを特徴とする請求項8から13のいずれか一項に記載の方法。
【図1】

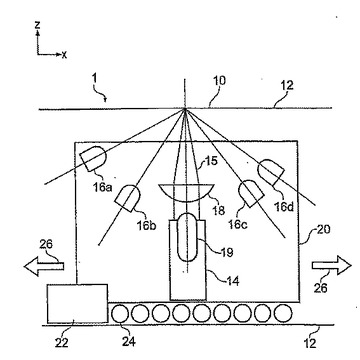
【図2】
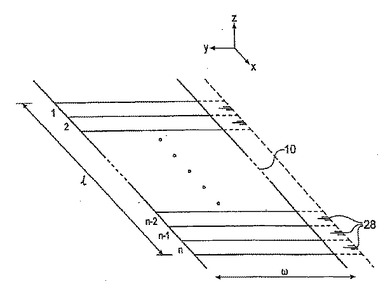
【図3】
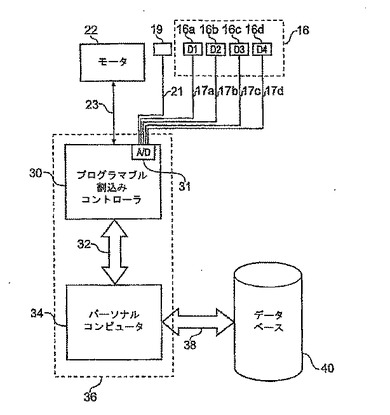
【図4】
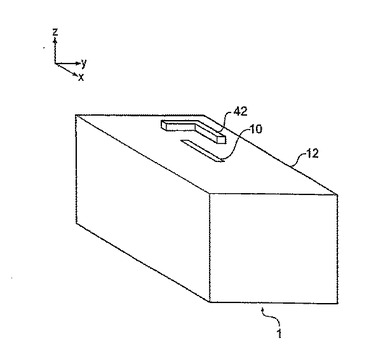
【図5】
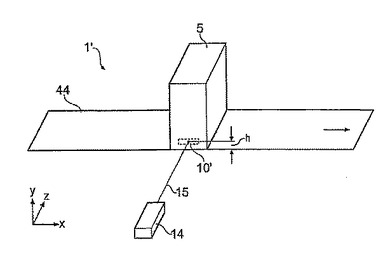
【図6A】
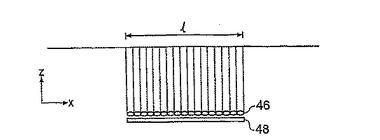
【図6B】
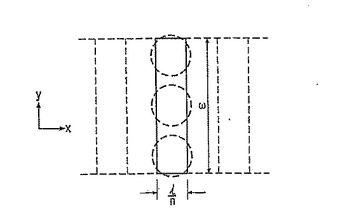
【図7A】
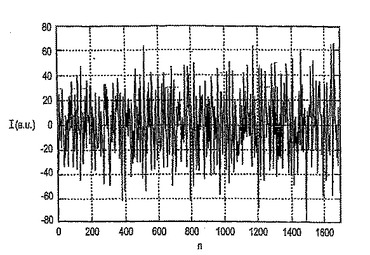
【図7B】
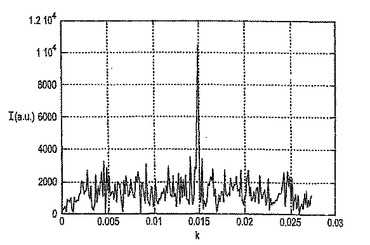
【図8A】
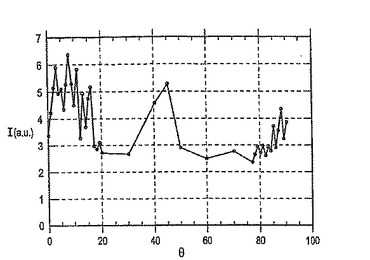
【図8B】
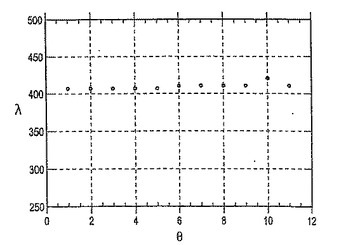
【図9】
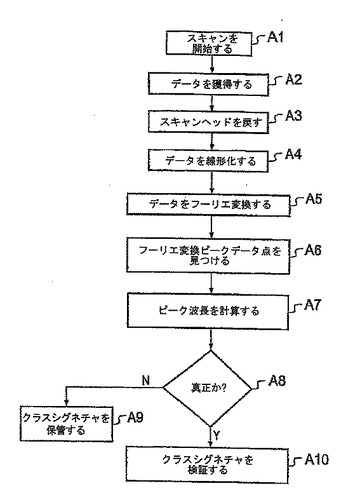
【図10A】
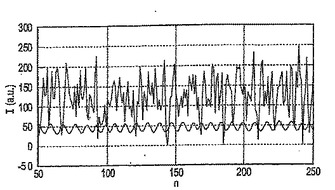
【図10B】
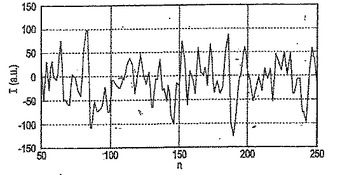
【図10C】
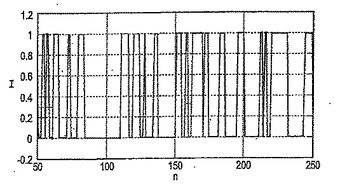
【図11】
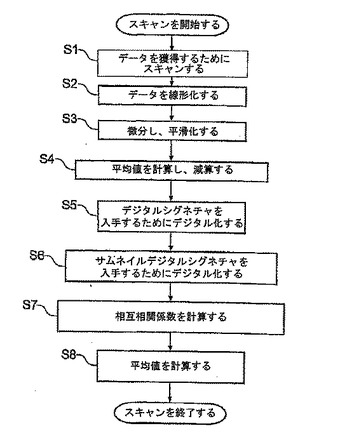
【図12】
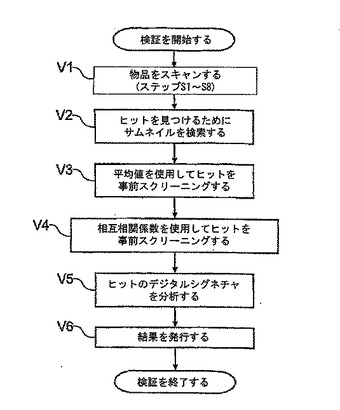
【図13A】
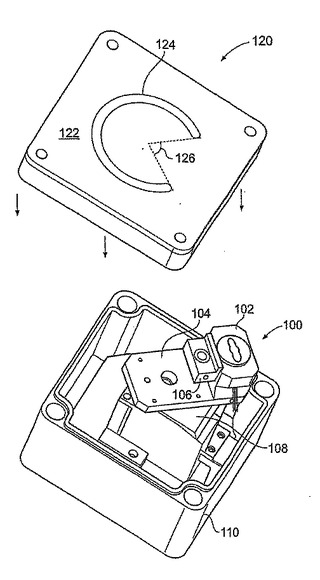
【図13B】
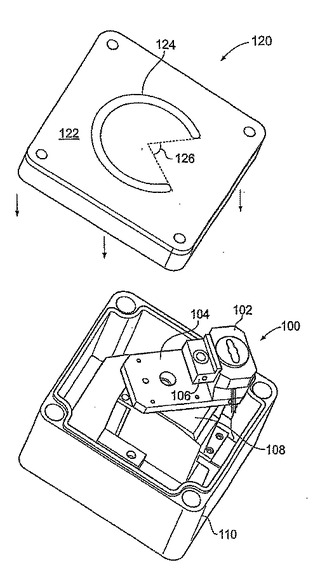
【図14A】
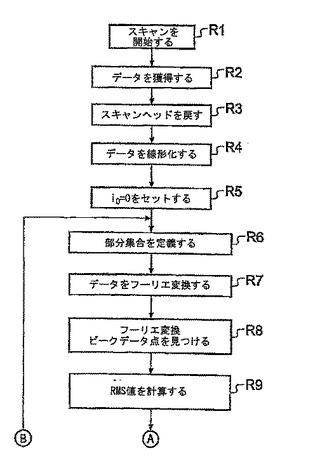
【図14B】
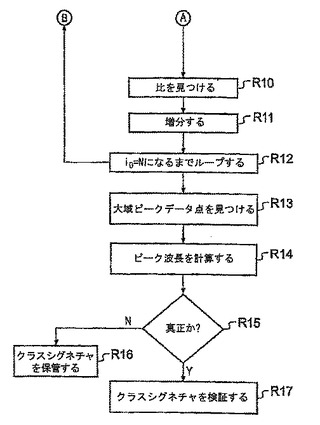
【図15】
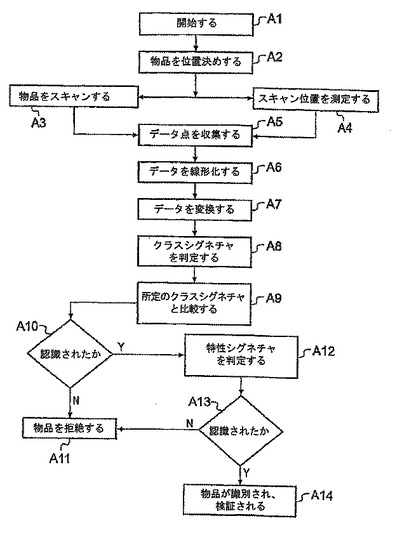
【図16A】
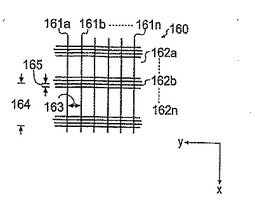
【図16B】
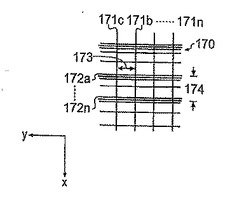
【図16C】
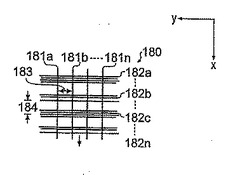
【図16D】
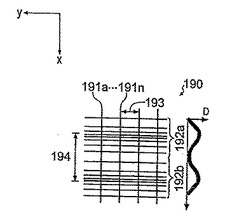
【図16E】
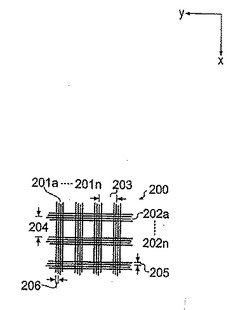
【図16F】

【図16G】
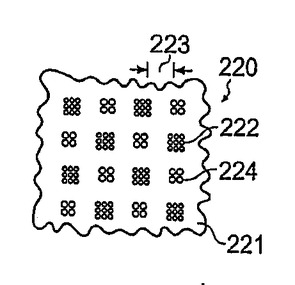
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7A】
【図7B】
【図8A】
【図8B】
【図9】
【図10A】
【図10B】
【図10C】
【図11】
【図12】
【図13A】
【図13B】
【図14A】
【図14B】
【図15】
【図16A】
【図16B】
【図16C】
【図16D】
【図16E】
【図16F】
【図16G】
【公開番号】特開2012−178181(P2012−178181A)
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願番号】特願2012−117402(P2012−117402)
【出願日】平成24年5月23日(2012.5.23)
【分割の表示】特願2007−525334(P2007−525334)の分割
【原出願日】平成17年7月29日(2005.7.29)
【出願人】(510308791)インジェニア・テクノロジー・(ユーケイ)・リミテッド (7)
【Fターム(参考)】
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願日】平成24年5月23日(2012.5.23)
【分割の表示】特願2007−525334(P2007−525334)の分割
【原出願日】平成17年7月29日(2005.7.29)
【出願人】(510308791)インジェニア・テクノロジー・(ユーケイ)・リミテッド (7)
【Fターム(参考)】
[ Back to top ]