
内燃機関の制御装置
【課題】内燃機関の自動停止中及び自動始動後のヒータの消費電力量を低減し、且つ空燃比フィードバック制御の開始の遅れを防止する。
【解決手段】排出ガスセンサを加熱するヒータと、ヒータへの印加実効電圧を制御するヒータ制御装置を備え、目標ヒータ印加実効電圧を、排出ガスセンサ温度が内燃機関の運転中のセンサ素子目標温度となるような第1の目標印加実効電圧305に設定する第一制御期間301と、内燃機関の自動停止開始後、第1の目標印加実効電圧より低い第2の目標印加実効電圧306に設定する第二制御期間302と、第二制御期間の終了を判定する第二制御期間終了判定手段と、第二制御期間の終了判定後、第2の目標印加実効電圧より高く、排出ガスセンサのセンサ素子温度が内燃機関の自動停止中のセンサ素子目標温度となるような第3の目標印加実効電圧307に制御する第三制御期間303を備える。
【解決手段】排出ガスセンサを加熱するヒータと、ヒータへの印加実効電圧を制御するヒータ制御装置を備え、目標ヒータ印加実効電圧を、排出ガスセンサ温度が内燃機関の運転中のセンサ素子目標温度となるような第1の目標印加実効電圧305に設定する第一制御期間301と、内燃機関の自動停止開始後、第1の目標印加実効電圧より低い第2の目標印加実効電圧306に設定する第二制御期間302と、第二制御期間の終了を判定する第二制御期間終了判定手段と、第二制御期間の終了判定後、第2の目標印加実効電圧より高く、排出ガスセンサのセンサ素子温度が内燃機関の自動停止中のセンサ素子目標温度となるような第3の目標印加実効電圧307に制御する第三制御期間303を備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、排出ガスセンサのヒータ制御装置を備えた内燃機関の制御装置に係り、特に、内燃機関の自動停止中(アイドルストップ中)における排出ガスセンサのヒータ制御装置に関するものである。
【背景技術】
【0002】
低炭素社会への取り組みから、車両用内燃機関においても二酸化炭素(CO2)排出量を削減する技術が待望されており、近年、車両の停止アイドリング中に内燃機関を自動停止(アイドルストップ)させることでCO2排出量を削減させる技術などが盛んである。
【0003】
この内燃機関の自動停止中に、作動させる必要のない電気負荷に対する電源供給を遮断することで、バッテリ電力の消費電力量を低減する技術が、例えば、特開2001−295678公報に開示されている。即ち、内燃機関停止中の消費電力量を低減することで内燃機関運転中にバッテリに充電する必要発電量を削減し、発電機による発電の内燃機関にかかる負荷を低減することで燃料消費量を低減し、引いてはCO2排出量を削減することができる。
【0004】
一方で、内燃機関の排出ガスセンサにおいて、内燃機関から排出される排出ガス中の空燃比を検出する際には、センサ素子温度が活性温度である必要があり、ヒータを付設しセンサ素子を加熱することで活性温度にすることが一般的である。ここで、内燃機関の自動停止中にヒータへの電源供給を遮断した場合、内燃機関の自動停止中にセンサ素子温度が活性温度以下まで低下し、内燃機関の自動停止が終了し自動始動した後、センサ素子温度を活性温度まで昇温し、空燃比を検出し空燃比フィードバックを実施するまでの時間が長くなり、排出ガスが悪化する問題がある。
【0005】
かかる問題に対して、例えば、特開平09−88688公報によると、内燃機関の自動停止中にセンサ素子温度を活性温度に維持することで、内燃機関の自動始動直後から空燃比を検出し空燃比フィードバックを開始することで、排出ガス悪化を防止する方法が開示されている。
【0006】
また、例えば、特開2003−148206公報によると、内燃機関の自動停止中にセンサ素子温度を活性温度より低い温度に設定された所定の余熱温度付近に維持することで、内燃機関の自動停止中におけるヒータ消費電力を抑制しつつ、内燃機関の自動始動後にセンサ素子温度を活性温度まで昇温させる時間を短くし、早期に空燃比フィードバックを開始することで排出ガス悪化も抑制する方法が開示されている。
【0007】
また、例えば、特開2009−156108公報によると、内燃機関の自動始動後の空燃比検出非要求期間が長いほど、内燃機関の自動停止中に維持する余熱温度を低温側に設定することで、内燃機関の自動停止中におけるヒータへの通電量の抑制と、内燃機関の自動始動後における空燃比の検出要求に対する応答性の確保を両立させている。
【0008】
また、例えば、特開2010−185345公報によると、内燃機関の自動停止時間を予測し、予測した自動停止時間に基づき「内燃機関の自動停止中にセンサ素子温度を所定温度(例えば、活性温度)に維持した場合のヒータの消費電力量」と、「内燃機関の自動停止中にヒータへの電力供給を停止し、内燃機関の自動始動後に再びヒータへの電力供給を開始しセンサ素子温度を所定温度にした場合のヒータの消費電力量」の少なくなる方を、内燃機関の自動停止中のヒータ制御として選択することで、より消費電力量が少なくなるヒータ制御方法を開示している。
【0009】
ところで、内燃機関の排出ガスセンサのセンサ素子温度を活性温度に維持するために、排出ガスセンサのセンサ素子の実温度と排出ガスセンサのセンサ素子のインピーダンスの関係に着目し、センサ素子のインピーダンスからセンサ素子の実温度を推定し、推定したセンサ素子の実温度が所望の活性温度になるようヒータへの印加実効電圧を調整する方法がある。しかしながら、経時変化に伴い、センサ素子が排気にさらされることや、センサ素子への付着物などにより劣化し、センサ素子の実温度とインピーダンスの関係が、例えば、図30(a)のインピーダンス劣化品3004のように、インピーダンス初期中央品3002から変化し、センサ素子のインピーダンスによるセンサ素子の実温度の推定にずれが生じることで、所望の活性温度を維持できず、センサ素子の実温度が所望の活性温度より高くなり、消費電力量の増大という問題や、センサ素子やヒータへの過加熱という問題が生じる。
また、センサ素子特性のばらつきによっても、センサ素子の実温度とインピーダンスの関係が、例えば、図30(a)のインピーダンス初期下限品3001のように、インピーダンス初期中央品3002と異なるため、センサ素子のインピーダンスによるセンサ素子の実温度の推定にずれが生じ、所望の活性温度を維持できず、センサ素子の実温度が所望の活性温度より低くなり、空燃比制御の実行不可、または、空燃比制御の精度が悪化し、結果、排出ガスが悪化するという問題が生じる。
【0010】
かかる問題に対して、例えば、特開2000−65784公報によると、所定運転状態(内燃機関の冷間定常アイドル状態、完全暖機定常アイドル状態、及び、完全暖機定常走行状態の内の少なくとも一つの運転状態)において、所定期間中にヒータへ供給された電力の積算電力量を、経時変化に伴うセンサ素子の劣化のパラメータとし、センサ素子のインピーダンスを補正することで、センサ素子温度を制御目標値へ適切に制御でき、センサ素子やヒータへの過加熱を防止することが開示されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2001−295678号公報
【特許文献2】特開平09−88688号公報
【特許文献3】特開2003−148206号公報
【特許文献4】特開2009−156108号公報
【特許文献5】特開2010−185345号公報
【特許文献6】特開2000−65784号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、上記特許文献1に示される従来技術を、自動停止/自動始動装置を備えた内燃機関の排出ガスセンサのヒータに適用した場合、内燃機関の自動停止中にヒータへの電源供給を遮断することで、ヒータの消費電力量を低減できるものの、内燃機関の自動停止中にセンサ素子温度が活性温度以下まで低下し、内燃機関の自動停止が終了し自動始動した後、センサ素子温度を活性温度まで昇温し、空燃比を検出し空燃比フィードバック制御を実施するまでの時間が長くなり、排出ガスが悪化する問題がある。
【0013】
また、上記特許文献2に示される従来技術では、内燃機関の自動停止中にセンサ素子温度を活性温度に維持することで、内燃機関の自動始動直後から空燃比を検出し空燃比フィードバック制御を開始でき、排出ガス悪化を防止できるが、内燃機関の自動停止中におけるヒータの消費電力量を低減できない問題がある。
【0014】
また、上記特許文献3に示される従来技術では、内燃機関の自動停止中にセンサ素子温度を活性温度より低い温度に設定された所定の余熱温度付近に維持することで、内燃機関の自動停止中におけるヒータ消費電力を抑制しつつ、内燃機関の自動始動後にセンサ素子温度を活性温度まで昇温させる時間を短くし、早期に空燃比フィードバック制御を開始することで排出ガス悪化も抑制できるが、次のような問題がある。
即ち、内燃機関の自動停止開始後、センサ素子温度は、ヒータへ電源供給せずとも、活性温度から所定の余熱温度に低下するため、この間のヒータへの電源供給を停止することで、自動停止中におけるヒータの消費電力量を更に低減できる点が考慮されていない。
【0015】
また、上記特許文献5に示される従来技術では、内燃機関の自動停止時間を予測し、予測した自動停止時間に基づき「内燃機関の自動停止中にセンサ素子温度を所定温度(例えば、活性温度)に維持した場合のヒータの消費電力量」と、「内燃機関の自動停止中にヒータへの電力供給を停止し、内燃機関の自動始動後に再びヒータへの電力供給を開始しセンサ素子温度を所定温度にした場合のヒータの消費電力量」の少なくなる方を、内燃機関の自動停止中のヒータ制御として選択することで、より消費電力量を少なくしているが、次のような問題点がある。
即ち、内燃機関の自動停止中、運転者の車両発進意図があったときに自動始動するような自動停止/自動始動装置を備えた内燃機関においては、いつ、自動停止が解除され自動始動されるかが予め分からないが、上記特許文献5に示される技術によると、内燃機関の自動停止時間を道路の混雑状況に関する情報に基づき予測しているため、例えば、道路の混雑状況に関する情報提供のない地域、信号停止時における自動停止/自動始動、運転者の心変わりによる自動始動、などの状況では予測することができず、消費電力量を少なくする効果を得ることができない。
ここで、運転者の車両発進意図とは、例えば、アクセルペダルやクラッチペダルの踏み込み、ブレーキペダルの解除、など、である。
【0016】
また、上記特許文献1〜5に示される従来技術では、内燃機関の自動停止/自動始動が連続するような場合、即ち、内燃機関の自動始動後、排出ガスセンサが活性状態となる前に再び内燃機関の自動停止が開始されるような場合に、センサ素子温度が内燃機関の自動停止中における所定のセンサ素子目標温度以下に低下し、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達が遅延し、空燃比フィードバック制御の開始タイミングが遅れることにより燃費や排出ガスが悪化する点が考慮されていない。
【0017】
また、上記特許文献1〜5に示される従来技術では、センサ周辺温度の影響が考慮されていない。即ち、内燃機関の自動停止中にセンサ周辺温度が低下するため、センサ素子温度を内燃機関の自動停止中における所定のセンサ素子目標温度に維持するための印加実効電圧が、センサ周辺温度に応じて異なる点が考慮されていない。
また、内燃機関の自動始動時のセンサ周辺温度の違いにより、自動始動後のセンサ素子温度の昇温速度が変わり、特に、センサ周辺温度が低い場合、センサ素子温度の昇温が遅くなり、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達が遅延し、空燃比フィードバック制御の開始タイミングが遅れることにより燃費や排出ガスが悪化する点が考慮されていない。
【0018】
また、上記特許文献1〜5に示される従来技術では、排出ガスセンサのセンサ素子温度をセンサ素子インピーダンスから推定し、目標のセンサ素子インピーダンスになるようにヒータを制御するような排出ガスセンサのヒータ制御装置において、センサ素子温度とセンサ素子インピーダンスの関係が、センサ素子特性のばらつきや、劣化による特性変化により変化することが考慮されていない。
即ち、センサ素子インピーダンスから推定する推定センサ素子温度と、実際のセンサ素子温度は異なる場合があり、ヒータにより所定の目標センサ素子インピーダンスに制御していても、実際のセンサ素子温度とは異なり、実際のセンサ素子温度が推定センサ素子温度より高い場合は、内燃機関の自動停止中におけるヒータ消費電力が増大する問題があり
、実際のセンサ素子温度が推定センサ素子温度より低い場合は、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度が活性温度に到達するのが遅れ、結果、空燃比フィードバック制御の開始が遅れることで、燃費や排出ガスが悪化する問題がある。
【0019】
また、上記特許文献6に示される従来技術では、内燃機関の冷間定常アイドル状態、完全暖機定常アイドル状態、完全暖機定常走行状態といった、内燃機関の運転中にヒータへ供給された電力の積算電力量に基づき、センサ素子インピーダンスを補正しているため、排出ガスセンサのセンサ素子の周辺雰囲気に影響する因子として、内燃機関の回転速度や負荷、水温や吸気温、排気温といった各温度、車速など、多くの因子があり、各それぞれのばらつきの影響により、精度よくセンサ素子インピーダンスを補正することが困難という問題がある。
また、センサ素子特性のばらつき、特に、実際のセンサ素子温度が推定センサ素子温度より低い場合の、内燃機関の自動始動後における空燃比の検出要求に対し、センサ素子温度が活性温度に到達するのが遅れ、その結果、空燃比フィードバック制御の開始が遅れることで、燃費や排出ガスが悪化する問題が考慮されていない。
【0020】
この発明は、上記のような従来の問題点を解消するためになされたもので、内燃機関の自動停止中、及び、自動始動後におけるヒータの消費電力量を低減でき、また、自動始動後における空燃比フィードバック制御の開始遅延を防止し燃費や排出ガスの悪化を防止できる排出ガスセンサのヒータ制御装置を備えた内燃機関の制御装置を得ることを目的とする。
【課題を解決するための手段】
【0021】
この発明に係わる内燃機関の制御装置は、内燃機関の停止条件が成立したときに前記内燃機関を自動停止し、前記内燃機関の始動条件が成立したときに前記内燃機関を自動始動する前記内燃機関の自動停止/自動始動装置と、前記内燃機関の排気通路に設けられ、排出ガス中の空燃比、又は、排出ガスの理論空燃比からのリッチ/リーンの傾向、の少なくとも一方を検出する排出ガスセンサと、前記排出ガスセンサを加熱するヒータと、前記ヒータへの印加実効電圧を目標ヒータ印加実効電圧となるように制御するヒータ制御装置を備え、前記ヒータ制御装置は、前記目標ヒータ印加実効電圧を、前記排出ガスセンサのセンサ素子温度が前記内燃機関の運転中のセンサ素子目標温度となるような第1の目標印加実効電圧に設定する第一制御期間と、前記内燃機関の自動停止開始後、前記目標ヒータ印加実効電圧を、前記第1の目標印加実効電圧より低い第2の目標印加実効電圧に設定する第二制御期間と、前記第二制御期間中に、前記第二制御期間の終了を判定する第二制御期間終了判定手段と、前記第二制御期間終了判定手段により、前記第二制御期間の終了判定後、前記目標ヒータ印加実効電圧を、前記第2の目標印加実効電圧より高く、前記排出ガスセンサのセンサ素子温度が前記内燃機関の自動停止中のセンサ素子目標温度となるような第3の目標印加実効電圧に制御する第三制御期間とを備えるように構成したものである。
【発明の効果】
【0022】
この発明の内燃機関の制御装置によれば、内燃機関の自動停止開始後、センサ素子温度が活性温度から所定の余熱温度に低下するまでヒータへ電源供給せず、所定の余熱温度に低下した後、内燃機関の自動停止終了まで所定の余熱温度を保持することで、内燃機関の自動停止中におけるヒータの消費電力量を低減でき、また、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達遅延を防止し、空燃比フィードバック制御の開始が遅れず排出ガスの悪化を防止できる排出ガスセンサのヒータ制御装置を備えた内燃機関の制御装置を得ることができる。
【0023】
上述した、またその他の、この発明の目的、特徴、効果は、以下の実施の形態における詳細な説明および図面の記載からより明らかとなるであろう。
【図面の簡単な説明】
【0024】
【図1】この発明における排出ガスセンサのヒータ制御装置を搭載した内燃機関の概略構成を示した図である。
【図2】図1に示す排出ガスセンサの内部構造を等価的に示した回路図である。
【図3】この発明の実施の形態1における、内燃機関の自動停止中、及び、自動停止後におけるヒータ制御を示すタイミングチャートである。
【図4】この発明の実施の形態1における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図5】この発明の実施の形態1における、ヒータ消費電力量の低減効果を従来技術と比較しながら説明するタイミングチャートである。
【図6】この発明の実施の形態2における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図7】この発明の実施の形態2の補正を実施しなかった場合の課題を説明するタイミングチャートである。
【図8】この発明の実施の形態2における、内燃機関の自動停止/自動始動が所定期間内に連続するときに、第二制御期間終了時間を短く補正することによる効果を説明するタイミングチャートである。
【図9】この発明の実施の形態2における、内燃機関の自動停止/自動始動が所定期間内に連続するときに、第3の目標印加実効電圧を高く補正することによる効果を説明するタイミングチャートである。
【図10】この発明の実施の形態3における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図11】この発明の実施の形態3の補正を実施しなかった場合の課題を説明するタイミングチャートである。
【図12】この発明の実施の形態3における、センサ周辺温度が低いほど高く、高いほど低く補正することによる効果を説明するタイミングチャートである。
【図13】この発明の実施の形態4における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図14】この発明の実施の形態4の補正を実施しなかった場合の課題と、第3の目標印加実効電圧を自動停止開始からの経過時間が長いほど高く補正することによる効果を説明するタイミングチャートである。
【図15】この発明の実施の形態5における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図16】この発明の実施の形態5の補正を実施しなかった場合の課題を説明するタイミングチャートである。
【図17】この発明の実施の形態5における、第4の目標印加実効電圧、又は、第4の目標印加実効電圧を印加する印加期間を補正することによる効果を説明するタイミングチャートである。
【図18】この発明の実施の形態6における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図19】この発明の実施の形態6における、センサ周辺温度に応じて第四制御期間にヒータに印加する印加期間を補正することによる効果を説明するタイミングチャートである。
【図20】この発明の実施の形態6における、センサ周辺温度に応じて第四制御期間にヒータに印加する印加実効電圧を補正することによる効果を説明するタイミングチャートである。
【図21】この発明の実施の形態7における、内燃機関の自動停止中、及び、自動停止後におけるヒータ制御を示すタイミングチャートである。
【図22】この発明の実施の形態7における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図23】この発明の実施の形態8における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図24】この発明の実施の形態9における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図25】この発明の実施の形態9の補正を実施しなかった場合の課題を説明するタイミングチャートである。
【図26】この発明の実施の形態9における、センサ周辺温度が低いほど低く、高いほど高く補正することによる効果を説明するタイミングチャートである。
【図27】この発明の実施の形態10における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図28】この発明の実施の形態10の補正を実施しなかった場合の課題と、第3の目標インピーダンスを自動停止開始からの経過時間が長いほど低く補正することによる効果を説明するタイミングチャートである。
【図29】この発明の実施の形態11における、内燃機関の自動停止中におけるヒータ制御を示すタイミングチャートである。
【図30】センサ素子温度、センサ素子インピーダンス、及び、内燃機関の自動停止後ヒータへの印加実効電圧を0V(ヒータ停止)としてからの経過時間、の関係を説明する図である。
【図31】この発明の実施の形態11における第3の目標インピーダンスをヒータ停止期間が短いほど高く、ヒータ停止期間が長いほど低く補正する理由を説明する図である。
【図32】この発明の実施の形態11における第3の目標インピーダンスの補正方法を示したフローチャートである。
【図33】この発明の実施の形態11における内燃機関の自動停止中のヒータ消費電力低減効果を説明するタイミングチャートである。
【図34】この発明の実施の形態11における内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達遅延の防止を説明するタイミングチャートである。
【図35】この発明の実施の形態12における第3の目標インピーダンスの補正方法を示したフローチャートである。
【図36】この発明の実施の形態13における第3の目標インピーダンスの補正方法を示したフローチャートである。
【図37】この発明の実施の形態14における排出ガスセンサのヒータ制御方法を示したフローチャートである。
【図38】この発明の実施の形態15における排出ガスセンサの故障検出方法を示したフローチャートである。
【発明を実施するための形態】
【0025】
以下、この発明の実施の形態について、図面を参照して詳細に説明する。なお、各図中、同一符号は、同一あるいは相当部分を示すものとする。
【0026】
実施の形態1.
図1は、この発明の実施の形態1に係る排出ガスセンサのヒータ制御装置112を搭載した内燃機関の概略構成を示すものである。
図1において、内燃機関101には、吸気通路102と排気通路103が連通され、排気通路103には、排出ガス中の有害物質を除去するための触媒104が設けられている。触媒104の上流側には、第一の排出ガスセンサとして、排出ガスセンサ105が設けられている。排出ガスセンサ105は、触媒104の上流側における排出ガスの酸素濃度を検出し、第一の空燃比に対応した検出信号AF1を出力する。また、触媒104の下流側には、第二の排出ガスセンサとして、排出ガスセンサ106が設けられている。排出ガスセンサ106は、触媒104の下流側における排出ガスの酸素濃度を検出し、第二の空燃比に対応した検出信号AF2を出力する。
【0027】
また、内燃機関101には、内燃機関101の運転状態を検出する各種センサ108が設けられており、各種センサ108の検出信号は内燃機関の制御装置(以下、単に制御装置ともいう。)107に入力されている。
【0028】
制御装置107は、マイクロプロセッサ、ROM、RAM、I/Oインターフェースなどにより構成され、制御装置107の空燃比制御装置110は、第1及び第2の空燃比に対応する各検出信号AF1、AF2と、各種センサ108からの検出信号に基づいて、空燃比フィードバック制御を行い、吸気通路102に設けられたインジェクタ109に対する駆動制御信号を生成する。なお、インジェクタ109は、内燃機関101の各気筒の筒内に直接燃料噴射するように取り付けられたものでもよい。
【0029】
また、制御装置107の自動停止/自動始動装置111は、車両の停止アイドリング中など内燃機関101の停止条件が成立したときに内燃機関101を自動停止し、運転者の車両発進意図があったときなど内燃機関101の始動条件が成立したときに内燃機関101を自動始動するようになっている。
【0030】
なお、空燃比制御装置110や自動停止/自動始動装置111、排出ガスセンサのヒータ制御装置112、といった制御装置107の各装置は、1つの制御装置で実行するよう構成しているが、複数の制御装置で実行しても同じであることは言うまでもない。
【0031】
ここで、空燃比制御装置110についてさらに詳しく説明する。
触媒104は、内燃機関101の排出ガス中のHC、CO、NOxを同時に浄化する三元触媒で、理論空燃比の付近において高い浄化性能を発揮するため、触媒104の上流の排出ガスセンサ105の検出信号AF1が理論空燃比となるようインジェクタ109の燃料噴射量をフィードバック制御する。但し、各気筒毎に取り付けられたインジェクタ109の気筒間のバラツキや、各気筒から排出ガスセンサ105までの排気通路の長さの違いにより、排出ガスセンサ105の検出信号AF1が理論空燃比に制御されているときでも触媒104内が理論空燃比となっていない場合があり、また、排出ガスセンサ105が高い排気温度にさらされることなどにより、検出信号AF1の出力変動が発生する場合もあり
、これらを補正するために、空燃比制御装置110は、触媒104の下流の排出ガスセンサ106の検出信号AF2を用いて理論空燃比との誤差を補正し、触媒下流の空燃比を理論空燃比に保っている。(以下、「空燃比フィードバック制御」と称す。)
【0032】
図2は、図1に示す排出ガスセンサ105、106の内部構造を等価的に示した回路図である。図2に示すように、排出ガスセンサ105、106は、センサ素子201を備えている。また、排出ガスセンサ105、106には、ヒータ202が付設されている。
【0033】
制御装置107の排出ガスセンサのヒータ制御装置112は、排出ガスセンサ105、106のセンサ素子温度が、運転状態に応じた所定の温度になるようヒータ202への印加実効電圧を調整する。例えば、内燃機関101の運転時は、排出ガスセンサ105、106が活性状態となるセンサ素子温度になるようヒータ202への印加実効電圧が調整され、内燃機関101の自動停止中は、所定の保温温度になるようヒータ202への印加実効電圧が調整される。内燃機関101の自動停止中については以下で詳しく説明する。
なお、ヒータ202への印加実効電圧を調整する代わりに、ヒータ202への通電時間を調整しても同じことである。
【0034】
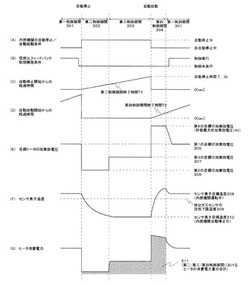
ここで図3のタイムチャートを参照しながら、この発明の実施の形態1に係る内燃機関の制御装置における排出ガスセンサのヒータ制御装置112について説明する。
図3(A)は、制御装置107の自動停止/自動始動装置111による内燃機関101の自動停止の期間、及び、自動停止/自動始動のタイミングを示し、図3(B)は、制御装置107の空燃比制御装置110による空燃比フィードバック制御の開始/終了タイミングを示す。
図3(C)は、内燃機関101の自動停止開始からの経過時間を示し、自動停止/自動始動装置111による内燃機関101の自動始動時にリセットされる。
また、図3(D)は、内燃機関101の自動始動開始からの経過時間を示し、自動停止/自動始動装置111による内燃機関101の自動停止時にリセットされる。
なお、自動停止開始からの経過時間、及び、自動始動開始からの経過時間は、例えば、制御装置107内で演算される。
【0035】
内燃機関101の運転中である第一制御期間301では、図3(E)、図3(F)に示すように、目標ヒータ印加実効電圧を、排出ガスセンサ105、106のセンサ素子温度が内燃機関101の運転中のセンサ素子目標温度308となるような第1の目標印加実効電圧305に設定する。
【0036】
次に、内燃機関101の自動停止開始後である第二制御期間302では、図3(C)、図3(E)に示すように、目標ヒータ印加実効電圧を、自動停止開始からの経過時間が第二制御期間終了時間T1に到達するまで、第1の目標印加実効電圧305より低い第2の目標印加実効電圧306に設定する。
【0037】
次に、内燃機関101の自動停止中である第三制御期間303では、自動停止開始からの経過時間が第二制御期間終了時間T1に到達後、図3(E)、図3(F)に示すように
、目標ヒータ印加実行電圧を、第2の目標印加実効電圧306より高く、排出ガスセンサ105、106のセンサ素子温度が内燃機関101の自動停止中のセンサ素子目標温度310となるような第3の目標印加実効電圧307に設定する。
【0038】
次に、内燃機関101の自動始動開始後である第四制御期間304では、図3(C)、図3(E)に示すように、目標ヒータ印加実効電圧を、自動始動開始からの経過時間が第四制御期間終了時間T2に到達するまで、第1の目標印加実効電圧305以上である第4の目標印加実効電圧に設定する。
【0039】
次に、内燃機関101の自動始動後、第四制御期間終了時間T2経過後、目標ヒータ印加実効電圧を、排出ガスセンサ105、106のセンサ素子温度が内燃機関101の運転中のセンサ素子目標温度308となるような第1の目標印加実効電圧305に設定する第一制御期間301となる。
内燃機関101の運転中のセンサ素子目標温度308は、例えば、排出ガスセンサ105、106の活性下限温度309以上の活性温度である。
【0040】
ここで、内燃機関101の自動停止中のセンサ素子目標温度310は、例えば、内燃機関101の自動始動後、空燃比フィードバック制御のための空燃比検出要求開始までに、第四制御期間における第4の目標印加実効電圧の印加により、排出ガスセンサのセンサ素子温度を内燃機関101の運転中のセンサ素子目標温度308に到達させ、かつ、第二制御期間302、第三制御期間303、第四制御期間304におけるヒータの消費電力量の合計311が最小となるように、予め適合試験などによって設定される。
なお、第三制御期間303における内燃機関101の自動停止中のセンサ素子目標温度310を低く設定するほど、第四制御期間304に昇温しなければならない温度幅が大きくなり、内燃機関101の運転中のセンサ素子目標温度308に到達するまでの時間が長くなると共に、第四制御期間304における消費電力量が大きくなるが、第三制御期間における消費電力量が小さくなる。
一方、第三制御期間303における内燃機関101の自動停止中のセンサ素子目標温度310を高く設定するほど、第四制御期間304に昇温しなければならない温度幅が小さくなり、内燃機関101の運転中のセンサ素子目標温度308に到達するまでの時間が短くなると共に、第四制御期間304における消費電力量が小さくなるが、第三制御期間における消費電力量が大きくなる。
【0041】
ここで、第二制御期間終了時間T1は、例えば、内燃機関101の自動停止開始時の排出ガスセンサのセンサ周辺温度が所定温度であるなど、ある所定の環境下で、内燃機関101の自動停止開始後、第二制御期間302にて、排出ガスセンサのセンサ素子温度が低下し、第三制御期間303における内燃機関101の自動停止中のセンサ素子目標温度310に到達するまでの時間が、予め適合試験などによって設定される。
【0042】
また、第四制御期間終了時間T2は、例えば、内燃機関101の自動始動開始時の排出ガスセンサのセンサ周辺温度が所定温度であるなど、ある所定の環境下で、内燃機関101の自動始動開始後、第四制御期間304にて、ヒータ202に第4の目標印加実効電圧を印加することで排出ガスセンサのセンサ素子温度が上昇し、第一制御期間301における内燃機関101の運転中のセンサ素子目標温度308に到達するまでの時間が、予め適合試験などによって設定される。
【0043】
ここで、第1の目標印加実効電圧305は、例えば、第一制御期間301における内燃機関101の運転中のセンサ素子目標温度308になるよう、エンジン回転速度とエンジン負荷からなる運転領域毎に予め適合試験などによって設定される。
【0044】
ここで、第2の目標印加実効電圧306は、第二制御期間302の消費電力量低減のため、十分に小さい値、例えば、0V(ヒータ停止)が設定される。
【0045】
ここで、第3の目標印加実効電圧307は、例えば、第三制御期間303における内燃機関101の自動停止中のセンサ素子目標温度310となるよう、予め適合試験などによって設定される。
【0046】
ここで、第4の目標印加実効電圧は、図3(E)に示すように、例えば、ヒータ202
の許容最大印加実効電圧(例えば、14V)が設定され、排出ガスセンサのセンサ素子温度が、速やかに、内燃機関101の自動停止中のセンサ素子目標温度310から内燃機関101の運転中のセンサ素子目標温度308に到達できる。
なお、電源としてのバッテリを内燃機関の始動装置と共有するようなシステムにおいては、始動中のバッテリ電圧の低下などの制約を受けるため、その瞬間のバッテリ電圧値が最大印加実効電圧となる。
【0047】
なお、内燃機関101の自動始動開始後、第四制御期間終了時間T2が経過し、第四制御期間から第一制御期間へ移行する際、即ち、目標ヒータ印加実効電圧を、第4の目標印加実効電圧から第1の目標印加実効電圧へ切り替える際、図3(E)に示すように、徐々に、第4の目標印加実効電圧から第1の目標印加実効電圧へ変化させるような、いわゆる漸減処理を実施することで、空燃比フィードバック開始前後の排出ガスセンサのセンサ素子温度の急変を防止し、内燃機関101の運転中のセンサ素子目標温度308に安定させるようにしてもよい。
【0048】
次に、図4のフローチャートを用いて、本発明における排出ガスセンサのヒータ制御方法、即ち、内燃機関101の自動停止中、及び、自動始動後における目標ヒータ印加実効電圧の設定方法に関して、制御装置107での処理を説明する。
【0049】
図4で示されるフローチャートのスタートからエンドは制御装置107の演算処理周期毎に毎回演算され、まず、ステップS401において、キーオン等により制御装置107の初期化条件が成立したとき、ステップS402で、キーオンからキーオフまでの間の内燃機関101の自動停止/自動始動回数C_IS、自動停止開始からの経過時間T_IS_ON、及び、自動始動開始からの経過時間T_IS_OF、に0を格納し、初期化を行う。
【0050】
次にステップS403で、被水による素子割れ条件が成立した場合、ステップS404で、目標ヒータ印加実効電圧V_Tに、被水時の目標印加実効電圧V_TWを格納する。
ここで、被水による素子割れ条件とは、内燃機関101の冷間始動時や冷間運転時、もしくは、内燃機関101の自動停止中に機関やセンサ素子の温度が低下した後に自動始動する場合など、機関やセンサ素子の温度が凝縮点以下に低下している状態を指す条件で、例えば、水温や内燃機関の始動後経過時間などにより設定されている。
即ち、例えば、内燃機関101の冷間始動時、排出ガス中に含まれる水蒸気が、温まっていない排気管(凝縮点以下)と触れることで凝縮され凝縮水となり、この凝縮水が飛散し
、排出ガスセンサのセンサ素子が被水する可能性がある。このとき、排出ガスセンサのセンサ素子は、早期に活性状態にするため、ヒータにより急激に加熱されているため、被水した部分と被水していない部分とでの熱膨張の違いなどにより素子割れが起きる恐れがある。このため、一般的に、内燃機関101の冷間始動時や冷間運転時、もしくは、内燃機関101の自動停止中に機関やセンサ素子の温度が低下した後に自動始動する場合、などに、ヒータによる加熱を制限しており、この条件を設定したものである。
また、被水時の目標印加実効電圧V_TWとして、被水しても素子割れを起こさない目標印加実効電圧が設定される。又は、内燃機関101が完全暖機となり凝縮水の発生がなくなるまで、0V(即ち、ヒータ停止)を設定してもよい。
【0051】
ステップS403で、被水による素子割れ条件が不成立の場合、ステップS405で、内燃機関101の自動停止開始時であるかを判定する。ステップS405で自動停止開始時と判定された場合、ステップS406で、自動停止/自動始動回数C_ISの前回値に1を加算し、自動停止/自動始動回数C_ISに格納し、また、ステップS407で、自動始動開始からの経過時間T_IS_OFに0を格納することでT_IS_OFをリセットし、ステップS408へ進む。一方、ステップS405で自動停止開始時と判定されなかった場合、ステップS408へ進む。
ここで、自動停止開始時とは、図3において、第一制御期間301から第二制御期間302に移行したタイミングである。
【0052】
次に、ステップS408で、自動停止/自動始動回数C_ISが1未満の場合、即ち、キーオン後、一度も内燃機関101の自動停止が行われていない場合、ステップS409で、目標ヒータ印加実効電圧V_Tに、第1の目標印加実効電圧V_T1を格納する。
一方、ステップS408で、自動停止/自動始動回数C_ISが1以上の場合、即ち、キーオン後、1回以上、内燃機関101の自動停止が行われた場合、ステップS410へ進む。
【0053】
次に、ステップS410で、内燃機関101の自動停止中と判定されたとき、ステップS411で、自動停止開始からの経過時間T_IS_ONの前回値に演算処理周期を加算し、経過時間T_IS_ONに格納の上、ステップS412に進む。
【0054】
次に、ステップS412で、自動停止開始からの経過時間T_IS_ONが、上記段落[0041]で説明した第二制御期間終了時間T1未満のとき、ステップS413で、目標ヒータ印加実効電圧V_Tに、第2の目標印加実効電圧V_T2を格納する。
一方、ステップS412で、自動停止開始からの経過時間T_IS_ONが第二制御期間終了時間T1以上のとき、ステップS414で、目標ヒータ印加実効電圧V_Tに、第3の目標印加実効電圧V_T3を格納する。
【0055】
ステップS410で、内燃機関101の自動停止中と判定されなかったとき、ステップS415に進み、ステップS415で内燃機関の自動始動開始時と判定された場合、ステップS416で、自動停止開始からの経過時間T_IS_ONに0を格納することでT_IS_ONをリセットし、ステップS417へ進む。
一方、ステップS415で自動始動開始時と判定されなかった場合、ステップS417へ進む。ステップS417で、自動始動開始からの経過時間T_IS_OFの前回値に演算処理周期を加算し、経過時間T_IS_OFに格納の上、ステップS418に進む。
ここで、自動始動開始時とは、図3において、第三制御期間303から第四制御期間304に移行したタイミングである。
【0056】
次に、ステップS418で、自動始動開始からの経過時間T_IS_OFが、上記段落
[0042]で説明した第四制御期間終了時間T2未満のとき、ステップS419で、ヒータ202への目標ヒータ印加実効電圧V_Tに、第4の目標印加実効電圧V_T4を格納する。一方、ステップS418で、自動始動開始からの経過時間T_IS_OFが第四制御期間終了時間T2以上のとき、ステップS420で、目標ヒータ印加実効電圧V_Tに、第1の目標印加実効電圧V_T1を格納する。
【0057】
次に、ステップS421で、ヒータ202への印加実行電圧を、目標ヒータ印加実効電圧V_Tとなるように制御して、図4における処理を終了する。
【0058】
さて、ここで、図5を用いて、実施の形態1による内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量の低減効果について、従来技術と比較しながら説明する。
【0059】
まず、例えば、特許文献2に示される従来技術は、図5(F)の506のように、内燃機関の自動停止中も排出ガスセンサのセンサ素子温度を内燃機関の運転中のセンサ素子目標温度308に維持するようにしたものである(従来技術1とする)。
ここで、従来技術1における内燃機関の自動停止中から自動始動後にかけてのヒータ消費
電力量は、図5(G)より、下式(1)となる。
【0060】
消費電力量A+消費電力量B+消費電力量C+消費電力量D・・・式(1)
【0061】
これより、内燃機関の自動停止中の消費電力量(消費電力量B+消費電力量C+消費電力量D)は低減しないが、内燃機関の自動始動後の排出ガスセンサのセンサ素子温度の昇温のためのヒータ消費電力量の増加もないことが分かる。また、排出ガスセンサのセンサ素子温度を内燃機関の運転中のセンサ素子目標温度308に常に維持しているため、内燃機関の自動始動後、排出ガスセンサは直ちに空燃比を検出でき、排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308になるまで空燃比フィードバック制御開始を遅らせることがない。
【0062】
また、例えば、特許文献3や特許文献4に示される従来技術は、図5(E)の503のように、内燃機関の自動停止中に、排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308より低い、内燃機関の自動停止中のセンサ素子目標温度310を維持するための目標印加実効電圧を、常時印加するようにしたものである(従来技術2とする)。ここで、従来技術2における内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量は、図5(G)より、下式(2)となる。
【0063】
消費電力量A+消費電力量C+消費電力量D+消費電力量E・・・式(2)
【0064】
これより、消費電力量B>消費電力量Eであることより、従来技術1に比べ、内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量が低減していることが分かる。また、内燃機関の自動停止中に、排出ガスセンサのセンサ素子温度を、内燃機関の自動停止中のセンサ素子目標温度310に維持しているため、内燃機関の自動始動後に排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達するタイミングが、内燃機関の自動始動後の空燃比フィードバック制御開始タイミングに対し、遅れない。
【0065】
また、例えば、特許文献1に示される従来技術は、図5(E)の504のように、内燃機関の自動停止中に排出ガスセンサのヒータへの印加実効電圧を常時、0Vとしたものである(従来技術3とする)。ここで、従来技術3における内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量は、図5(G)より、下式(3)となる。
【0066】
消費電力量A+消費電力量E+消費電力量F・・・式(3)
【0067】
これより、従来技術3は、従来技術1や従来技術2と比べ、消費電力量を低減できることが分かる。しかし、図5(F)に示すように、排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308へ到達するタイミングが、従来技術2に比べ遅れ、自動停止時間が長い場合、センサ素子温度508が更に低下することで排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308へ到達するタイミングも遅れ、空燃比フィードバック制御開始までに排出ガスセンサが活性状態にならないことがある。
【0068】
これら従来技術1〜従来技術3が、内燃機関の自動停止中に、センサ素子温度をある一定の目標センサ素子温度に維持、又は、目標ヒータ印加実効電圧をある一定の目標印加実効電圧に維持しているのに対し、この発明の実施の形態1による方法では、内燃機関の自動停止中の目標ヒータ印加実効電圧を図5(E)の501のように第二制御期間終了時間T1経過後に変更するようにしている。即ち、内燃機関の自動停止中のヒータへの目標印加実効電圧を2段階に設定できるようにしている。
【0069】
ここで、実施の形態1における内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量は、図5(G)より、下式(4)となる。
【0070】
消費電力量A+消費電力量D+消費電力量E・・・式(4)
【0071】
これより、従来技術1に対しては、消費電力量B+消費電力量C>消費電力量Eの関係から、式(1)から式(4)を減算した量、即ち、消費電力量B+消費電力量C−消費電力量Eだけ、内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量を、実施の形態1により、低減できる。
また、従来技術2に対しては、式(2)から式(4)を減算した量、即ち、消費電力量Cだけ、内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量を、実施の形態1により、低減できる。
【0072】
また、従来技術3に対しては、消費電力量D>消費電力量Fの関係から、式(4)から式(3)を減算した量、即ち、消費電力量D−消費電力量Fだけ、内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量が、実施の形態1により、増加する。
しかし、従来技術3は上記段落[0065]〜[0067]で説明したように、自動停止開始からの経過時間が長い場合、センサ素子温度508が更に低下することで排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308へ到達するタイミングが遅れ、空燃比フィードバック制御開始までに排出ガスセンサが活性状態にならない問題があるのに対し、実施の形態1では、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にすることができる。
【0073】
以上のように、この発明の実施の形態1の内燃機関の制御装置は、内燃機関の停止条件が成立したときに内燃機関を自動停止し、内燃機関の始動条件が成立したときに内燃機関を自動始動する内燃機関の自動停止/自動始動装置と、内燃機関の排気通路に設けられ、排出ガス中の空燃比、又は、排出ガスの理論空燃比からのリッチ/リーンの傾向、の少なくとも一方、を検出する排出ガスセンサと、排出ガスセンサを加熱するヒータと、ヒータへの印加実効電圧を目標ヒータ印加実効電圧となるように制御するヒータ制御装置を備え
、ヒータ制御装置は、目標ヒータ印加実効電圧を、排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度となるような第1の目標印加実効電圧に設定する第一制御期間と、内燃機関の自動停止開始後、目標ヒータ印加実効電圧を、第1の目標印加実効電圧より低い第2の目標印加実効電圧に設定する第二制御期間と、第二制御期間中に、第二制御期間の終了を判定する第二制御期間終了判定手段と、第二制御期間終了判定手段により、第二制御期間の終了判定後、目標ヒータ印加実効電圧を、第2の目標印加実効電圧より高く、排出ガスセンサのセンサ素子温度が内燃機関の自動停止中のセンサ素子目標温度となるような第3の目標印加実効電圧に制御する第三制御期間備えるように構成している。
【0074】
また、この発明の実施の形態1における内燃機関の制御装置は、排出ガスセンサの検出値に応じ、内燃機関への燃料噴射量を補正する燃料噴射量補正手段を備え、ヒータ制御装置は、内燃機関の自動始動後、目標ヒータ印加実効電圧を、内燃機関の運転中のセンサ素子目標温度になるまで、第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、第四制御期間は、内燃機関の自動始動後、燃料噴射量補正手段が動作を開始するまでに終了するよう設定され、第二制御期間、第三制御期間及び第四制御期間におけるヒータ消費電力量の合計が最小となるよう設定される。
【0075】
また、この発明の実施の形態1におけるヒータ制御装置は、内燃機関の自動停止開始からの経過時間を計測する自動停止経過時間計測手段を備え、第二制御期間終了判定手段は
、自動停止経過時間計測手段によって計測された自動停止開始からの経過時間が、第二制御期間終了時間を経過した際に、第二制御期間の終了を判定する。
【0076】
また、この発明の実施の形態1における第二制御期間終了時間は、内燃機関の自動停止開始から、排出ガスセンサのセンサ素子温度が内燃機関の自動停止中のセンサ素子目標温度に到達するまでの時間に設定される。
【0077】
従って、この発明の実施の形態1の内燃機関の制御装置によれば、内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量を従来技術に比べ低減することができる。また、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にできるため、排出ガスを悪化させることがない。
【0078】
実施の形態2.
次に、この発明の実施の形態2の内燃機関の制御装置における排出ガスセンサのヒータ制御装置について説明する。本実施の形態2では、実施の形態1に対し、内燃機関101の自動停止/自動始動が連続する場合の補正方法を示す。
【0079】
実施の形態2は、実施の形態1に対し、以下の点が異なるものである。
即ち、図6は、実施の形態2の特徴的な制御を説明するフローチャートで、実施の形態1の図4に対して、図6にはステップS602〜S608が追加され、ステップS601、S609、S610が変更されている。
以下、図6における図4からの変更点に関し説明する。
【0080】
図6において、まず、ステップS401において、キーオン等により制御装置107の初期化条件が成立したとき、ステップS601で、キーオンからキーオフまでの間の内燃機関101の自動停止/自動始動回数C_IS、自動停止開始からの経過時間T_IS_ON、自動始動開始からの経過時間T_IS_OF、及び、自動停止/自動始動が連続していることを示す自動停止/自動始動連続フラグF_REN、に0を格納し、初期化を行う。
【0081】
次に、ステップS403で、被水による素子割れ条件が不成立の場合、ステップS405で内燃機関101の自動停止開始時であるかを判定する。ステップS405で自動停止開始時と判定された場合、ステップS406で、自動停止/自動始動回数C_ISの前回値に1を加算し、自動停止/自動始動回数C_ISに格納し、ステップS602に進む。
【0082】
ステップS602で、内燃機関101の自動停止/自動始動が連続していると判定した場合、即ち、前回自動始動後の第四制御期間が終了する前に次の自動停止を開始した場合(自動始動開始からの経過時間が第四制御期間終了時間T2より短い場合)、ステップS603で、自動停止/自動始動連続フラグF_RENに1を格納し、ステップS604で
、第二制御期間302から第三制御期間303に移行するタイミングを決める第二制御期間終了時間T1を、自動始動開始からの経過時間が短いほど、短くなるよう補正する補正値K_REN_Tを下式(5)で演算する。
【0083】
K_REN_T=GAIN_T×(T_IS_OF ÷ T2) ・・・式(5)
【0084】
次に、ステップS605で、第三の目標印加実効電圧を、自動始動開始からの経過時間が短いほど、高くなるよう補正する補正値K_REN_Vを下式(6)で演算する。
【0085】
K_REN_V=GAIN_V×(T2 ÷ T_IS_OF) ・・・式(6)
【0086】
一方、ステップS602で、内燃機関101の自動停止/自動始動が連続していないと判定した場合、ステップS606で、自動停止/自動始動連続フラグF_RENに0を格納し、ステップS607で、補正値K_REN_Tに1を格納し、ステップS608で、補正値K_REN_Vに1を格納することで、自動停止/自動始動が連続している場合の補正を無効化する。
【0087】
次に、ステップS407で、自動始動開始からの経過時間T_IS_OFに0を格納することでT_IS_OFをリセットし、ステップS408へ進む。
一方、ステップS405で自動停止開始時と判定されなかった場合、ステップS408へ進む。
【0088】
ステップS408からステップS411までは、図4と同じ処理を行い、ステップS609で、自動停止開始からの経過時間T_IS_ONが、第二制御期間終了時間T1に補正値K_REN_Tを乗算した値より小さいとき、ステップS413で、ヒータ202への目標ヒータ印加実効電圧V_Tに、第二の目標印加実効電圧V_T2を格納する。
一方、ステップS609で、自動停止開始からの経過時間T_IS_ONが、第二制御期間終了時間T1に補正値K_REN_Tを乗算した値以上のとき、ステップS610で、目標ヒータ印加実効電圧V_Tに、第三の目標印加実効電圧V_T3に補正値K_REN_Vを乗算した値を格納する。
【0089】
なお、ステップS415以降は、図4と同じ処理となる。
【0090】
ここで、図7〜図9を用いて、内燃機関101の自動停止/自動始動が連続する場合に対し、実施の形態2により解決する課題とその効果を説明する。
【0091】
まず、図7を用いて、実施の形態2の補正を実施しなかった場合の課題について説明する。図7において、自動始動開始からの経過時間である701、702は、第四制御期間終了時間T2より短い、即ち、内燃機関101の前回自動始動後の第四制御期間が終了する前に次の自動停止を開始しており、内燃機関101の自動停止/自動始動が連続している状態である。
このとき、実施の形態2による第二制御期間終了時間T1の補正、又は、第3の目標印加実効電圧の補正を実施しない場合、第四制御期間中にセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308まで昇温する前に、内燃機関101が次の自動停止を開始し
、第二制御期間となりヒータを停止するため、図7(F)のセンサ素子温度704に示すように、センサ素子温度が内燃機関の自動停止中のセンサ素子目標温度310以下に低下している。この結果、図7における自動始動4のタイミングの後の空燃比フィードバック制御開始タイミング703までに、センサ素子温度704が内燃機関の運転中のセンサ素子目標温度308に到達できず、空燃比フィードバック制御開始が遅れ、遅れた間の排出ガスの悪化が生じる。又は、空燃比フィードバック制御開始を変更せずそのまま実行した場合、センサ素子が十分活性していない状態での不正確な検出信号を使用することになり
、やはり排出ガスの悪化が生じる。
【0092】
次に、図8を用いて、内燃機関101の自動停止/自動始動が所定期間内に連続するときに、第二制御期間終了時間T1を短く補正することによる効果について説明する。
即ち、図8において、自動始動開始からの経過時間である701、702が、第四制御期間終了時間T2より短い、即ち、内燃機関101の前回自動始動後の第四制御期間が終了する前に次の自動停止を開始しており、内燃機関101の自動停止/自動始動が連続している状態と判定されたとき、前回の自動始動から今回の自動停止までの時間が短いほど、第二制御期間終了時間T1を短くすることで、801、802のように、内燃機関の自動停止中のセンサ素子目標温度310を維持するための第3の目標印加実効電圧を、補正を実施しない場合に比べ早く印加することができ、803で示されるセンサ素子温度のように、センサ素子温度が内燃機関の自動停止中のセンサ素子目標温度310より低下することを防止できる。
この結果、自動始動4のタイミングの後の空燃比フィードバック制御開始タイミング703までに、センサ素子温度803が内燃機関の運転中のセンサ素子目標温度308に到達でき、内燃機関101の自動停止/自動始動が連続しているときにおいても、排気ガスが悪化しない。
【0093】
次に、図9を用いて、内燃機関101の自動停止/自動始動が所定期間内に連続するときに、第3の目標印加実効電圧を高く補正することによる効果について説明する。
即ち、図9において、自動始動開始からの経過時間である701、702が、第四制御期間終了時間T2より短い、即ち、内燃機関101の前回自動始動後の第四制御期間が終了する前に次の自動停止を開始しており、内燃機関101の自動停止/自動始動が連続している状態と判定されたとき、前回の自動始動から今回の自動停止までの時間が短いほど、901のように、第3の目標印加実効電圧を高くすることで、902に示すセンサ素子温度のように第三制御期間中にセンサ素子温度を昇温させることができる。
この結果、自動始動4のタイミングの後の空燃比フィードバック制御開始タイミング703までに、センサ素子温度902が内燃機関の運転中のセンサ素子目標温度308に到達でき、内燃機関101の自動停止/自動始動が連続しているときにおいても、排気ガスが悪化しない。
【0094】
なお、上記実施の形態2における図8、図9では、内燃機関の自動停止/自動始動が連続するときに、第二制御期間終了時間T1を短く補正する場合と、第3の目標印加実効電圧を高く補正する場合とを、それぞれ分けて説明したが、第二制御期間終了時間T1を短く補正する場合と、第3の目標印加実効電圧を高く補正する場合とを、同時に実施してもよい。
【0095】
なお、上記実施の形態2における自動停止/自動始動の連続は、自動始動開始からの経過時間が、第四制御期間終了時間T2より短い、即ち、内燃機関の前回自動始動後の第四制御期間が終了する前に次の自動停止を開始する状態としたが、自動停止/自動始動の連続とは、内燃機関の自動始動後、排出ガスセンサが活性状態になる前に、再び内燃機関の自動停止を開始するような状態であり、例えば、所定期間内(例えば、10分間中)に、自動停止/自動始動の回数が所定回数以上実施される状態、といった他の方法で判定してもよい。
【0096】
以上のように、この発明の実施の形態2における排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、内燃機関の自動停止/自動始動が連続することを判定する、自動停止/自動始動連続判定手段を備え、自動停止/自動始動連続判定手段が、自動停止/自動始動が連続していると判定したとき、第二制御期間終了時間が短くなるよう補正されるものである。
【0097】
また、この発明の実施の形態2における排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、内燃機関の自動停止/自動始動が連続することを判定する、自動停止/自動始動連続判定手段を備え、自動停止/自動始動連続判定手段が、自動停止/自動始動が連続していると判定したとき、第3の目標印加実効電圧が高くなるよう補正されるものである。
【0098】
また、この発明の実施の形態2における自動停止/自動始動の連続とは、内燃機関の自動始動後、排出ガスセンサが活性状態になる前に、再び内燃機関の自動停止を開始する状態である。
【0099】
以上のようにこの発明の実施の形態2によれば、実施の形態1の発明に対し、内燃機関の自動停止/自動始動が連続するときに、第二制御期間終了時間を短く補正、又は、第3の目標印加実効電圧を高く補正することで、排気ガスの悪化を防止することが可能となる。
【0100】
実施の形態3.
次に、この発明の実施の形態3の内燃機関の制御装置における排出ガスセンサのヒータ制御装置について説明する。本実施の形態3では、実施の形態1に対し、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合について示す。
【0101】
実施の形態3は、実施の形態1に対し、以下の点が異なるものである。
即ち、図10は、実施の形態3の特徴的な制御を説明するフローチャートで、実施の形態1の図4に対して、図10にはステップS1001〜S1005が追加され、ステップS1006が変更されている。
以下、図10における図4からの変更点に関し説明する。
【0102】
図10において、ステップS412で、自動停止開始からの経過時間T_IS_ONが第二制御期間終了時間T1以上のとき、即ち、第三制御期間であるとき、ステップS1001へ進み、排出ガスセンサの周辺温度ETが、排出ガスセンサの周辺温度の基準値ET_NRMにばらつき許容量ET_Zを加算した値より大きいかを判定する。ステップS1001で、大きいと判定された場合は、ステップS1002で、センサ周辺温度が高いほど補正係数K_Aが小さくなるよう、例えば、下式(7)により、補正係数K_Aを演算し、ステップS1006へ進む。
【0103】
K_A=ET_G1×(1−(ET−(ET_NRM+ET_Z))÷ET_NRM)
・・・式(7)
ここで、ET_G1は、排出ガスセンサの周辺温度ETが、基準値ET_NRMより大きい場合のゲインである。
【0104】
次に、ステップS1001で、大きくないと判定された場合は、ステップS1003で
、排出ガスセンサの周辺温度ETが、排出ガスセンサの周辺温度の基準値ET_NRMにばらつき許容量ET_Zを減算した値より小さいかを判定する。
ステップS1003で、小さいと判定された場合は、ステップS1004で、センサ周辺温度が低いほど補正係数K_Aが大きくなるよう、例えば、下式(8)により、補正係数K_Aを演算し、ステップS1006へ進む。
【0105】
K_A=ET_G2×(1−(ET−(ET_NRM+ET_Z))÷ET_NRM)
・・・式(8)
ここで、ET_G2は、排出ガスセンサの周辺温度ETが、基準値ET_NRMより小さい場合のゲインである。
【0106】
次に、ステップS1003で、小さくないと判定された場合は、ステップS1005で、補正係数K_Aに1を格納することで、排出ガスセンサの周辺温度にばらつきがある場合の補正を無効化し、ステップS1006へ進む。
補正係数K_Aの演算が完了すると、ステップS1006で、第3の目標印加実効電圧に補正係数K_Aを乗算する。
【0107】
ここで、排出ガスセンサの周辺温度ETは、センサ素子温度の上昇/下降に影響する因子であり、内燃機関101のエンジン回転速度や負荷などの運転状態、内燃機関101から排出される排出ガスの温度、排出ガスセンサの取り付け位置周辺の排気管壁面温度、触媒104の温度、外気温、のいずれか、又は、複数、又は、全てに基づいて推定される。
例えば、各種センサ108で排出ガスセンサ近傍の排出ガスの温度を測定している場合、排出ガスの温度をセンサ周辺温度ETとして使用してもよい。
また、例えば、各種センサ108で外気温を測定している場合、内燃機関101の自動停止直前の運転状態(エンジン回転速度やエンジン負荷、など)から自動停止時の排出ガスセンサの周辺温度ET0を推定し、自動停止開始からの経過時間T_IS_ONと外気温度に応じた温度低下係数を予め適合などによりマップ設定し、自動停止時の排出ガスセンサの周辺温度ET0にマッピングした温度低下係数を乗算して、排出ガスセンサの周辺温度ETを推定してもよい。
【0108】
ここで、基準値ET_NRMとは、例えば、第二制御期間終了時間T1を上記段落[0041]のように適合試験により設定したときのセンサ周辺温度であり、センサ周辺温度が、内燃機関101から排出される排出ガスの温度、排出ガスセンサの取り付け位置周辺の排気管壁面温度、触媒104の温度、外気温、などの影響によって、変動する前の基準値である。
【0109】
ここで、ばらつき許容量ET_Zとは、センサ周辺温度ETが基準値ET_NRMと異なったとしても、センサ素子温度への影響が小さく許容できる量を基準値からの差分で定義し、予め適合などにより設定する量である。
【0110】
なお、本実施の形態3では、排出ガスセンサの周辺温度ETとして、演算毎に最新の値を用いて補正値K_Aの演算を行うように構成しているが、第二制御期間302から第三制御期間303へ切り替わったときの排出ガスセンサの周辺温度ETを制御装置107のRAM上に記憶し、第三制御期間303の終了まで使用し、補正値K_Aの演算を行ってもよい。
もしくは、第一制御期間301から第二制御期間302へ切り替わったときの排出ガスセンサの周辺温度ET、即ち、内燃機関101の自動停止が開始されたときの排出ガスセンサの周辺温度ETを、制御装置107のRAMに記憶し、第三制御期間303で使用し、補正値K_Aの演算を行ってもよい。
【0111】
なお、本実施の形態3では、ステップS1006で、センサ周辺温度ETと基準値ET_NRM±ばらつき許容量ET_Zとの差分に応じ、第3の目標印加実効電圧に補正係数K_Aを乗算するような構成にしているが、センサ周辺温度ETと基準値ET_NRM±ばらつき許容量ET_Zとの差分に応じ、第3の目標印加実効電圧に補正係数を加減算するような構成にしても同様の効果が得れる。
【0112】
ここで、図11、図12を用いて、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合に対し、実施の形態3により解決する課題とその効果を説明する。
【0113】
まず、図11を用いて、実施の形態3の補正、即ち、第3の目標印加実効電圧を、センサ周辺温度が低いほど高く、高いほど低くする補正を実施しなかった場合の課題について説明する。
図11(G)において、第二制御期間302の直前、即ち、内燃機関101の自動停止開始直前のセンサ周辺温度は、自動停止開始直前の運転状態、内燃機関101から排出される排出ガスの温度、排出ガスセンサの取り付け位置周辺の排気管壁面温度、触媒104の温度、外気温、等に依存し、例えば、自動停止直前に、車両のアイドル状態、かつ、外気温が低いような場合、排気温度が低いため、センサ周辺温度も低い状態で自動停止が開始され、また、低い外気温により外部から排気管等を通じ冷やされ、センサ周辺温度は、基準となる基準値の挙動1101に対し、1102のように低くなる。一方、例えば、自動停止直前に、排気温度が高くなるような内燃機関の高負荷運転をしていた場合、排気温度が高いため、センサ周辺温度も高い状態で自動停止が開始され、センサ周辺温度は、基準となる基準値の挙動1101に対し、1103のように高くなる。
【0114】
ここで、実施の形態3の補正を実施しなかった場合、センサ素子温度は、センサ周辺温度の影響を受け、図11(F)のように、センサ周辺温度が低い1102の場合、センサ素子温度は1105のように低くなり、センサ周辺温度が高い1103の場合、センサ素子温度は1106のように高くなる。ここで、この影響が問題となるのは、内燃機関の自動始動後である第四制御期間304である。即ち、センサ周辺温度の違いによりセンサ素子温度の昇温速度が変わり、特に、センサ周辺温度が低い1102の場合、センサ素子温度の昇温が遅くなり、空燃比フィードバック制御開始までに排出ガスセンサのセンサ素子温度が内燃機関の運転時のセンサ素子目標温度308に到達できない恐れがある。
【0115】
次に、図12を用いて、実施の形態3の補正を実施した場合の効果について説明する。
まず、センサ周辺温度が基準のセンサ周辺温度1101より低い1102で示されるセンサ周辺温度の場合、センサ周辺温度ETと基準値ET_NRM−ばらつき許容量ET_Zとの差分に応じ、図12(E)の1202のようにヒータへの目標印加実効電圧は、基準の目標印加実効電圧1201に比べ、高く設定される。これにより、図12(F)の1204のように、第三制御期間中のセンサ素子温度が、内燃機関の自動停止中のセンサ素子目標温度310に保温される基準のセンサ素子温度1104に対し高くなることで、第四制御期間におけるセンサ素子温度1204は、基準のセンサ素子温度1104の第四制御期間における挙動に近くなる。このため、空燃比フィードバック制御開始までにセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できるようになる。
【0116】
次に、センサ周辺温度が基準のセンサ周辺温度1101より高い1103で示されるセンサ周辺温度の場合、センサ周辺温度ETと基準値ET_NRM+ばらつき許容量ET_Zとの差分に応じ、図12(E)の1203のようにヒータへの目標印加実効電圧は、基準の目標印加実効電圧1201に比べ、低く設定される。これにより、図12(F)の1205のように、第三制御期間中のセンサ素子温度は、内燃機関の自動停止中のセンサ素子目標温度310に保温される基準のセンサ素子温度1104に対し低くなることで、第四制御期間におけるセンサ素子温度1205は、基準のセンサ素子温度1104の第四制御期間における挙動に近くなる。このため、第三制御期間中に第3の目標印加実効電圧を下げることによる消費電力量の低減効果を得れ、また、空燃比フィードバック制御開始までにセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できる。
【0117】
以上のように、この発明の実施の形態3の排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、排出ガスセンサの周辺温度を推定するセンサ周辺温度推定手段を備え、第3の目標印加実効電圧は、センサ周辺温度推定手段によって推定されるセンサ周辺温度に応じて補正されるように構成している。
【0118】
実施の形態3のように構成することで、実施の形態1の発明に対し、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合において、第3の目標印加実効電圧を、センサ周辺温度が基準値より低いほど高く、高いほど低くする補正することで、センサ周辺温度が基準値より低い場合には、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にでき、排出ガスの悪化を防止し、センサ周辺温度が基準値より高い場合には、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にでき、排出ガスの悪化を防止する上、第三制御期間におけるヒータの消費電力量を低減できる。
【0119】
実施の形態4.
次に、この発明の実施の形態4における排出ガスセンサのヒータ制御装置について説明する。本実施の形態4では、実施の形態1に対し、さらに消費電力量を低減する方法を示す。
【0120】
実施の形態4は、実施の形態1に対し、以下の点が異なるものである。
即ち、図13は、実施の形態4の特徴的な制御を説明するフローチャートで、実施の形態1の図4に対して、図13にはステップS1301が追加され、ステップS1302が変更されている。
以下、図13における図4からの変更点に関し説明する。
【0121】
図13において、ステップS412で、自動停止開始からの経過時間T_IS_ONが第二制御期間終了時間T1以上のとき、即ち、第三制御期間であるとき、ステップS1301へ進み、下式(9)で示される内燃機関の自動停止開始からの経過時間が長くなるほど大きくなるような補正係数K_T3を演算し、ステップS1302に進む。
【0122】
K_T3=IST_G×(T_IS_ON−T1)÷(T_IS_ON_MAX−T1)+IST_OFST ・・・式(9)
【0123】
ステップS1302では、第3の目標印加実効電圧V_T3に補正係数K_T3乗算したものと、第3の目標印加実効電圧の上限値V_T3MAXと比較し、小さい方を目標ヒータ印加実効電圧V_Tに格納する。
【0124】
ここで、最大自動停止時間T_IS_ON_MAXは、例えば、内燃機関の自動停止中に、電気負荷等による電力消費によりバッテリの充電状態が低下し、内燃機関の自動始動ができなくなる前に、即ち、バッテリが上がる前に、内燃機関を自動始動させ、内燃機関を動力とする発電機によりバッテリを充電させるべく、予め設定された自動停止時間の最大時間であり、自動停止がこの最大時間以上となったとき、運転者の車両発進意図がなくとも内燃機関は自動始動する。
【0125】
ここで、ゲインIST_Gは、例えば、自動停止開始からの経過時間に対し、第3の目標印加実効電圧V_T3をどの程度大きく補正するかを調整する。
【0126】
ここで、オフセット量IST_OFSTは、例えば、0以上1以下の値とし、第3の目標印加実効電圧V_T3に対し、どの程度オフセットさせるかを調整する。
【0127】
ここで、第3の目標印加実効電圧の上限値V_T3MAXは、例えば、内燃機関の自動停止中に、ヒータによる加熱でセンサ素子温度を内燃機関の運転中のセンサ素子目標温度308に維持するような目標印加実効電圧、もしくは、それ以下の値に設定される。
【0128】
なお、第三の目標印加実効電圧V_T3に補正係数K_T3乗算したものと、第3の目標印加実効電圧の上限値V_T3MAXと比較し、小さい方を目標ヒータ印加実効電圧V_Tに格納することで上限クリップを設けたが、上限値V_T3MAXと比較し小さい方を選択することをせず、第三制御期間開始から所定時間経過した時点で、その時点の目標ヒータ印加実効電圧V_T(=V_T3×K_T3)でクリップする方法でもよい。
【0129】
ここで、図14のタイムチャートを参照しながら、実施の形態4により解決する課題とその効果を説明する。
【0130】
まず、実施の形態4の補正を実施しなかった場合の課題について説明する。
内燃機関の自動停止開始後、運転者の車両発進意図があったとき(例えば、アクセルペダルやクラッチペダルの踏み込み、ブレーキペダルの解除、など)に自動始動するような自動停止/自動始動装置においては、いつ、自動停止が解除され自動始動されるかを、制御装置107は予め分からない。このため、実施の形態1では、第3の目標印加実効電圧を
上記段落[0045]で示したような方法で、固定値として設定し、どのタイミングで自動始動されても、空燃比フィードバック制御開始より前にセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できるように設定されている。
しかしながら、図14(G)のセンサ周辺温度1401に示すように、第三制御期間の前部では、第三制御期間の後部に比べ、センサ周辺温度が高い。このため、この第三制御期間の前部で自動始動があった場合、第三制御期間の後部で自動始動があった場合に比べ、自動始動後に、排出ガスセンサのセンサ素子温度が、内燃機関の運転中のセンサ素子目標温度308に到達する時間は短くなる。従って、第三制御期間の前部の第3の目標印加実効電圧を、第三制御期間の後部の第3の目標印加実効電圧に比べ、低く補正すれば、さらに消費電力量を低減できる。
【0131】
次に、実施の形態4の補正を実施した場合の効果について説明する。
即ち、図14(E)の1402のように、目標印加実効電圧を第三制御期間の後部に比べ、第三制御期間の前部を低く補正することで、図14(H)の1404のように前部の消費電力量を低減することができ、この間に内燃機関の自動始動があった場合に、実施の形態1に比べ、消費電力量を低減することができる。
【0132】
また、図14(E)の1402のように、第三制御期間の後部を第3の目標印加実効電圧307より高く補正することで、図14(E)の1403のように、第四制御期間の昇温のための目標印加実効電圧を低くすることができ、図14(H)の1406のように消費電力量を低減することができる。
【0133】
ここで、図14(H)の1405の消費電力量増加分があるが、1405と1406の差し引きの消費電力量が小さくなるように予め適合などにより、式(9)のゲインIST_Gと、オフセット量IST_OFSTを設定する。
【0134】
つまり、最大自動停止時間T_IS_ON_MAXに対し、自動停止開始からの経過時間が長くなるにつれ、即ち、最大自動停止時間T_IS_ON_MAXに近づくにつれ、自動始動する可能性が高くなり、自動停止中の余熱温度を上げておくことで、自動始動後の昇温のための消費電力を抑えることができる。
【0135】
以上のように、この発明の実施の形態4における排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、第3の目標印加実効電圧は、自動停止経過時間計測手段によって計測される自動停止開始からの経過時間が長いほど高く補正されるように構成している。
【0136】
従って、実施の形態4のように構成することで、実施の形態1の発明に対し、第3の目標印加実効電圧を、自動停止経過時間計測手段によって計測された自動停止開始からの経過時間が長いほど高く補正することで、実施の形態1に比べ、さらに消費電力量を低減することができる。
【0137】
実施の形態5.
次に、この発明の実施の形態5における排出ガスセンサのヒータ制御装置について説明する。本実施の形態5では、実施の形態1に対し、さらに消費電力を低減する方法を示す。
【0138】
実施の形態5は、実施の形態1に対し、以下の点が異なるものである。
即ち、図15は、実施の形態5の特徴的な制御を説明するフローチャートで、実施の形態1の図4に対して、図15にはステップS1501〜S1506が追加され、ステップS1507、S1508が変更されている。
以下、図15における図4からの変更点に関し説明する。
【0139】
図15において、ステップS415で内燃機関の自動始動開始時と判定された場合、ステップS1501で、内燃機関の自動停止開始から自動停止終了までの自動停止時間として、この時点での自動停止開始からの経過時間T_IS_ONを、自動停止時間T_ISに格納し、ステップS416で、自動停止開始からの経過時間T_IS_ONに0を格納しリセットした上でステップS417へ進む。一方、ステップS415で自動始動開始時と判定されなかった場合、ステップS417へ進む。
ステップS417では、自動始動開始からの経過時間T_IS_OFの前回値に演算処理周期を加算し、経過時間T_IS_OFに格納の上、ステップS1502に進む。
【0140】
次に、ステップS1502で、自動停止時間T_ISが、第二制御期間終了時間T1以下のとき、即ち、第二制御期間中に自動始動したとき、ステップS1503で、第四制御期間終了時間T2に補正値K_T2Aを乗算した値を補正後の第四制御期間終了時間T2Cに格納し、ステップS1504で、第4の目標印加実行電圧V_T4を補正する補正値K_T4に、第二制御期間で自動始動した場合の補正値K_T4Aを格納する。
一方、ステップS1502で、自動停止時間T_ISが、第二制御期間終了時間T1より大きいとき、即ち、第三制御期間中に自動始動したとき、ステップS1505で、第四制御期間終了時間T2に補正値K_T2Bを乗算した値を補正後の第四制御期間終了時間T2Cに格納し、ステップS1506で、第4の目標印加実行電圧V_T4を補正する補正値K_T4に、第三制御期間で自動始動した場合の補正値K_T4Bを格納する。
【0141】
ここで、補正値K_T2A、K_T2B、K_T4A、K_T4Bは、例えば以下の式(10)〜(13)で演算される。
【0142】
K_T2A=T2A_G×T_IS÷T1+T2A_OFST・・・式(10)
K_T2B=T2B_G×(T_IS−T1)÷(T_IS_ON_MAX−T1)+T2B_OFST ・・・式(11)
K_T4A=T4A_G×T_IS÷T1+T4A_OFST・・・式(12)
K_T4B=T4B_G×(T_IS−T1)÷(T_IS_ON_MAX−T1)+T4B_OFST ・・・式(13)
【0143】
但し、T2A_G、T2B_G、T4A_G、T4B_Gはゲイン、T2A_OFST、T2B_OFST、T4A_OFST、T4B_OFSTはオフセットであり、自動停止時間T_ISに対する線形関数となっている。
即ち、自動停止時間T_ISが短いほど、補正値K_T2A、K_T2B、K_T4A、K_T4Bは、小さくなるように演算され、自動停止時間T_ISが短いほど、第四制御期間にヒータに印加する印加実効電圧は低くなり、印加期間は短くなる。
【0144】
次に、ステップS1507に進み、自動始動開始からの経過時間T_IS_OFが、ステップS1503、又は、ステップS1505で補正された補正後の第四制御期間終了時間T2C未満のとき、ステップS1508で、目標ヒータ印加実効電圧V_Tに、第4の目標印加実行電圧V_T4に補正値K_T4を乗算したものを格納する。一方、ステップS1507で、自動始動開始からの経過時間T_IS_OFが補正後の第四制御期間終了時間T2C以上のとき、ステップS420で、目標ヒータ印加実効電圧V_Tに、第1の目標印加実効電圧V_T1を格納する。
【0145】
なお、補正値K_T2A、K_T2B、K_T4A、K_T4Bは、自動停止時間T_ISに対する線形関数で設定する方法を述べたが、自動停止時間T_ISのテーブルにて設定してもよい。
【0146】
ここで、図16、図17を用いて、実施の形態5により解決する課題とその効果を説明する。
【0147】
まず、図16を用いて、実施の形態5の補正を実施しなかった場合の課題について説明する。
図16(A)において、自動始動1のタイミングで自動始動する場合を基準とし、自動始動のタイミングが自動始動2のタイミングであった場合を例に説明する。
実施の形態1では、第四制御期間304におけるセンサ素子温度の昇温のためのヒータへの印加実効電圧を上記段落[0046]による方法で空燃比フィードバック制御開始までに内燃機関の自動停止中のセンサ素子目標温度310に到達するよう設定している。
即ち、センサ周辺温度が最も低くなる最大自動停止時間T_IS_ON_MAXで自動始動する場合のような最も昇温速度が遅くなるような場合に対しても空燃比フィードバック制御開始までに内燃機関の自動停止中のセンサ素子目標温度310に到達するよう設定している。
従って、図16(E)に示すように、自動始動1のタイミングより自動停止時間が短くなる自動始動2のタイミングで自動始動した場合の印加実効電圧1602は、自動始動1のタイミングで自動始動した場合の1601と同じになる。
しかしながら、図16(G)に示すように、自動始動1のタイミングで自動始動したときのセンサ周辺温度Aに対し、自動始動2のタイミングで自動始動したときのセンサ周辺温度Bは高いため、図16(F)に示すように、センサ素子温度は、1603に比べ、1604の方が高くなる。このとき、ヒータ消費電力は、図16(H)に示すように、1605、1606ともに同じであることから、自動始動2のタイミングで自動始動した場合のヒータへの印加実効電圧を下げ、センサ素子温度を1603相当にするとヒータの消費電力量の低減を見込める。
【0148】
次に、図17を用いて、実施の形態5の補正を実施した場合の効果について説明する。
まず、実施の形態5によって、自動停止時間T_ISに応じて、第四制御期間にヒータに印加する印加期間を補正した場合の効果について説明する。
図17(D)における補正後の第四制御期間終了時間T2C(1701)は、上記段落[0042]で説明した第四制御期間終了時間T2を基準とし、内燃機関の自動停止時間が短いほど、短くなるよう設定される。即ち、自動停止時間が短いとき、図17(G)に示すように、自動始動1のタイミングで自動始動したときのセンサ周辺温度Aに対し、自動始動2のタイミングで自動始動したときのセンサ周辺温度Bは高いため、自動始動1のタイミングで自動始動したときに比べ、第4の目標印加実効電圧(許容最大印加実効電圧14V)を印加する時間が短くても、図17(F)の1705に示すように、空燃比フィードバック制御実施開始までに内燃機関の運転中のセンサ素子目標温度308に到達することができ、かつ、図17(H)に示すようにヒータ消費電力1707は、補正しない場合である図16(H)に示すヒータ消費電力1606より小さくできる。即ち、ヒータの消費電力を低減することができる。
【0149】
次に、実施の形態5によって、自動停止時間T_ISに応じて、第四制御期間にヒータに印加する印加実効電圧を補正した場合の効果について説明する。
図17(E)における補正後の第4の目標印加実効電圧V_T4×K_T4(1702)は、第4の目標印加実効電圧V_T4を基準とし、内燃機関の自動停止時間が短いほど、低くなるよう設定される。即ち、自動停止時間が短いとき、図17(G)に示すように、自動始動1のタイミングで自動始動したときのセンサ周辺温度Aに対し、自動始動2のタイミングで自動始動したときのセンサ周辺温度Bは高いため、自動始動1のタイミングで自動始動したときに比べ、第4の目標印加実効電圧が低くても、図17(F)の1706に示すように、空燃比フィードバック制御実施開始までに内燃機関の運転中のセンサ素子目標温度308に到達することができ、かつ、図17(H)に示すようにヒータ消費電力1708は、補正しない場合である図16(H)に示すヒータ消費電力1606より小さくできる。即ち、ヒータの消費電力を低減することができる。
【0150】
なお、上記実施の形態5における図17では、内燃機関の自動停止時間が短いほど、第四制御期間終了時間T2を短く補正する場合と、第4の目標印加実効電圧V_T4を低く補正する場合とを、それぞれ分けて説明したが、第四制御期間終了時間T2を短く補正する場合と、第4の目標印加実効電圧V_T4を低く補正する場合とを、同時に実施してもよい。
【0151】
以上のように、この発明の実施の形態5の排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、内燃機関の自動停止開始から自動停止終了までの自動停止時間を計測する自動停止時間計測手段と、内燃機関の自動始動後、目標ヒータ印加実効電圧を、内燃機関の運転中のセンサ素子目標温度になるまで、第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、第四制御期間において、第4の目標印加実効電圧と第4の目標印加実効電圧を印加する印加期間のいずれか1つ、または、両方は、自動停止時間計測手段によって計測された自動停止時間に応じて補正されるように構成している。
【0152】
従って、実施の形態5のように構成することで、実施の形態1の発明に対し、内燃機関の自動停止時間が短いほど、第四制御期間終了時間T2を短く補正、又は、第4の目標印加実効電圧V_T4を低く補正することで、実施の形態1に比べ、さらに消費電力量を低減することができる。
【0153】
実施の形態6.
次に、この発明の実施の形態6における排出ガスセンサのヒータ制御装置について説明する。本実施の形態6では、実施の形態1に対し、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合について示し、実施の形態3とは異なる方法を用いる。
【0154】
実施の形態6は、実施の形態1に対し、以下の点が異なるものである。
即ち、図18は、実施の形態6の特徴的な制御を説明するフローチャートで、実施の形態1の図4に対して、図18にはステップS1801〜S1810が追加され、ステップS1811、S1812が変更されている。
以下、図18における図4からの変更点に関し説明する。
【0155】
図18において、まず、ステップS401〜S415は、図4と同じ処理になる。
次に、ステップS1801〜S1805は、図10におけるステップS1001〜S1005と同様の処理になる。即ち、図18において、まず、ステップS1801で、排出ガスセンサの周辺温度ETが、排出ガスセンサの周辺温度の基準値ET_NRMにばらつき許容量ET_Zを加算した値より大きいかを判定する。ステップS1801で、大きいと判定された場合は、ステップS1802で、センサ周辺温度が高いほど補正係数K_Aが小さくなるよう、例えば、下式(14)により、補正係数K_Aを演算し、ステップS1806へ進む。
【0156】
K_A=ET_G1×(1−(ET−(ET_NRM+ET_Z))÷ET_NRM)
・・・式(14)
ここで、ET_G1は、排出ガスセンサの周辺温度ETが、基準値ET_NRMより大きい場合のゲインである。
【0157】
次に、ステップS1801で、大きくないと判定された場合は、ステップS1803で
、排出ガスセンサの周辺温度ETが、排出ガスセンサの周辺温度の基準値ET_NRMにばらつき許容量ET_Zを減算した値より小さいかを判定する。ステップS1803で、小さいと判定された場合は、ステップS1804で、センサ周辺温度が低いほど補正係数K_Aが大きくなるよう、例えば、下式(15)により、補正係数K_Aを演算し、ステップS1806へ進む。
【0158】
K_A=ET_G2×(1−(ET−(ET_NRM+ET_Z))÷ET_NRM)
・・・式(15)
ここで、ET_G2は、排出ガスセンサの周辺温度ETが、基準値ET_NRMより小さい場合のゲインである。
【0159】
次に、ステップS1803で、小さくないと判定された場合は、ステップS1805で、補正係数K_Aに1を格納することで、排出ガスセンサの周辺温度にばらつきがある場合の補正を無効化し、ステップS1806へ進む。
【0160】
なお、基準値ET_NRM、及び、ばらつき許容量ET_Zは、上記段落[0108][0109]と同じである。
【0161】
次に、ステップS1806〜S1812は、図15におけるステップS1502〜S1508と同様の処理になる。
即ち、図18において、まず、ステップS1806で、自動停止時間T_ISが、第二制御期間終了時間T1以下のとき、即ち、第二制御期間中に自動始動したとき、ステップS1807で、補正係数K_AにゲインET2A_Gを乗算したものを、第四制御期間終了時間T2に乗算した値を補正後の第四制御期間終了時間T2Cに格納し、ステップS1808で、補正係数K_Aに第二制御期間で自動始動した場合のゲインET4A_Gを乗算したものを、第4の目標印加実行電圧V_T4を補正する補正値K_T4に、格納する。
【0162】
一方、ステップS1806で、自動停止時間T_ISが、第二制御期間終了時間T1より大きいとき、即ち、第三制御期間中に自動始動したとき、ステップS1809で、補正係数K_AにゲインET2B_Gを乗算したものを、第四制御期間終了時間T2に乗算した値を補正後の第四制御期間終了時間T2Cに格納し、ステップS1810で、補正係数K_Aに第三制御期間で自動始動した場合のゲインET4B_Gを乗算したものを、第4の目標印加実行電圧V_T4を補正する補正値K_T4に、格納する。
【0163】
即ち、センサ周辺温度が低いほど補正係数K_Aが大きく、センサ周辺温度が高いほど補正係数K_Aが小さくなるものであるので、センサ周辺温度が低いほど、第四制御期間にヒータに印加する印加実効電圧は高く、印加期間は長く補正され、センサ周辺温度が高いほど、第四制御期間にヒータに印加する印加実効電圧は低く、印加期間は短く補正される。
【0164】
次に、ステップS1811に進み、自動始動開始からの経過時間T_IS_OFが、ステップS1807、又は、ステップS1809で補正された補正後の第四制御期間終了時間T2C未満のとき、ステップS1812で、目標ヒータ印加実効電圧V_Tに、第4の目標印加実行電圧V_T4に補正値K_T4を乗算したものを格納する。一方、ステップS1811で、自動始動開始からの経過時間T_IS_OFが補正後の第四制御期間終了時間T2C以上のとき、ステップS420で、目標ヒータ印加実効電圧V_Tに、第1の目標印加実効電圧V_T1を格納する。
【0165】
ここで、図19、図20を用いて、排出ガスセンサの周辺温度が基準温度と異なる場合
、即ち、排出ガスセンサの周辺温度にばらつきがある場合に対し、実施の形態6により解決する課題とその効果を説明する。
なお、実施の形態6の補正を実施しなかった場合の課題は、実施の形態3における図11の説明である段落[0113]〜[0114]と同じである。
【0166】
次に、実施の形態6の補正を実施した場合の効果について説明する。
まず、図19を用いて、センサ周辺温度に応じて、第四制御期間にヒータに印加する印加期間を補正した場合の効果について説明する。
【0167】
まず、センサ周辺温度が基準のセンサ周辺温度1101より低い1102で示されるセンサ周辺温度の場合、センサ周辺温度ETと基準値ET_NRM−ばらつき許容量ET_Zとの差分に応じ、図19(D)の1901に示されるように補正後の第四制御期間終了時間T2Cは、第四制御期間終了時間T2に対し、長くなる。従って、図19(E)の1904に示されるように、第四制御期間における第4の目標印加実効電圧(許容最大印加実効電圧14V)の印加期間は、1903で示される基準の印加期間に比べ、長く設定される。これにより、図19(F)のように、センサ素子温度1907は、空燃比フィードバック制御開始までにセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達でき、排気ガスは悪化しない。
【0168】
次に、センサ周辺温度が基準のセンサ周辺温度1101より高い1103で示されるセンサ周辺温度の場合、センサ周辺温度ETと基準値ET_NRM+ばらつき許容量ET_Zとの差分に応じ、図19(D)の1902に示されるように補正後の第四制御期間終了時間T2Cは、第四制御期間終了時間T2に対し、短くなる。従って、図19(E)の1905に示されるように、第四制御期間における第4の目標印加実効電圧(許容最大印加実効電圧14V)の印加期間は、1903で示される基準の印加期間に比べ、短く設定される。これにより、図19(F)のように、センサ素子温度1908の過昇温により排出ガスセンサが故障することを防げ、第4の目標印加実効電圧の印加期間を短くする分、ヒータ消費電力量を低減できる。また、空燃比フィードバック開始までにセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できる。
【0169】
次に、図20を用いて、センサ周辺温度に応じて、第四制御期間にヒータに印加する印加実効電圧を補正した場合の効果について説明する。
【0170】
まず、センサ周辺温度が基準のセンサ周辺温度1101より低い1102で示されるセンサ周辺温度の場合、センサ周辺温度ETと基準値ET_NRM−ばらつき許容量ET_Zとの差分に応じ、第四制御期間における目標ヒータ印加実効電圧を第4の目標印加実効電圧より高く補正することになるが、第4の目標印加実効電圧として、許容最大印加実効電圧14Vを設定している場合、これ以上、印加実効電圧を上げることができない。
したがって、この場合、センサ周辺温度に応じて、第四制御期間にヒータに印加する印加実効電圧を補正する方法では効果を望めないため、図19による方法を用いるとよい。
【0171】
一方、センサ周辺温度が基準のセンサ周辺温度1101より高い1103で示されるセンサ周辺温度の場合、センサ周辺温度ETと基準値ET_NRM+ばらつき許容量ET_Zとの差分に応じ、図20(E)の2001に示されるように、第四制御期間における目標ヒータ印加実効電圧を第4の目標印加実効電圧より低く設定する。これにより、図20(F)のように、第四制御期間におけるセンサ素子温度2002は、基準のセンサ素子温度2003の第四制御期間における挙動に近くなる。これにより、センサ素子温度2002の過昇温より排出ガスセンサが故障することを防げ、第四制御期間における目標ヒータ印加実効電圧を第4の目標印加実効電圧より低くする分、ヒータ消費電力量を低減できる。また、空燃比フィードバック開始までにセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できる。
【0172】
以上のように、この発明の実施の形態6における排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、排出ガスセンサの周辺温度を推定するセンサ周辺温度推定手段と、内燃機関の自動始動後、目標ヒータ印加実効電圧を、内燃機関の運転中のセンサ素子目標温度になるまで、第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、第四制御期間において、第4の目標印加実効電圧と第4の目標印加実効電圧を印加する印加期間のいずれか1つ、または、両方は、センサ周辺温度推定手段によって推定されるセンサ周辺温度に基づき補正されるように構成している。
【0173】
従って、実施の形態6のように構成することで、実施の形態1の発明に対し、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合において、センサ周辺温度が基準値より低いほど、第四制御期間終了時間T2を長く補正することで、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にでき、排出ガスの悪化を防止でき、センサ周辺温度が基準値より高いほど、第四制御期間終了時間T2を短く補正、または、第4の目標印加実効電圧を低く補正することで、センサ素子の過昇温による排出ガスセンサの故障を防止し、ヒータ消費電力量を低減できる。
【0174】
実施の形態7.
次に、この発明の実施の形態7における排出ガスセンサのヒータ制御装置について説明する。本実施の形態7では、実施の形態1に対し、第1の目標印加実効電圧、第2の目標印加実効電圧、第3の目標印加実効電圧を、排出ガスセンサのセンサ素子インピーダンスを基に設定するものである。
即ち、排出ガスセンサのヒータ制御装置112が、センサ素子温度と相関のあるセンサ素子インピーダンスを計測するインピーダンス計測手段を備えた制御装置であれば、インピーダンス計測手段によりセンサ素子インピーダンスを計測し、センサ素子インピーダンスが目標センサ素子インピーダンスとなるような目標ヒータ印加実効電圧を設定する。
【0175】
なお、センサ素子温度とセンサ素子インピーダンスは、例えば、図30(a)の3002に示すような相関関係があり、センサ素子温度が高くなるほど、センサ素子インピーダンスが小さくなる関係にある。
【0176】
なお、センサ素子インピーダンスが目標センサ素子インピーダンスとなるよう、ヒータへの印加実効電圧を調整する方法としては、例えば、計測したセンサ素子インピーダンスと目標センサ素子インピーダンスとの偏差、その積分、及び、微分の3つの要素に対し、比例ゲイン、積分ゲイン、微分ゲインを調整してフィードバック制御を行う、いわゆるPID制御がある。
【0177】
ここで図21のタイムチャートを参照しながら、この発明の実施の形態7における排出ガスセンサのヒータ制御装置112について説明する。
図21(A)は、制御装置107の自動停止/自動始動装置111による内燃機関101の自動停止の期間、及び、自動停止/自動始動のタイミングを示し、図21(B)は、制御装置107の空燃比制御装置110による空燃比フィードバック制御の開始/終了タイミングを示す。
【0178】
内燃機関101の運転中である第一制御期間301では、図21(D)に示すように、
排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段によって計測された実インピーダンス2104(Z_REAL)が、内燃機関の運転中のセンサ素子目標温度308(例えば、排出ガスセンサが活性状態となる排出ガスセンサのセンサ素子温度)に相関する第1の目標インピーダンス2101(Z_T1)となるような目標ヒータ印加実効電圧を設定する。
【0179】
次に、内燃機関101の自動停止開始後である第二制御期間302では、この期間の消費電力を低減するため、図21(D)に示すように、第1の目標インピーダンス以上の第2の目標センサ素子インピーダンス2102(Z_T2)となるような目標ヒータ印加実効電圧を設定する。
この第二制御期間中に、センサ素子温度の低下に連動し、センサ素子温度と相関するセンサ素子インピーダンスが、図21(D)に示すように上昇していく。
【0180】
次に、図21(D)に示すように、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)に到達後、内燃機関101の自動始動まで、実インピーダンス2104(Z_REAL)が、第3の目標インピーダンス2103(Z_T3)となるような目標ヒータ印加実効電圧を設定する。
【0181】
ここで、第3の目標センサ素子インピーダンスZ_T3は、上記段落[0040]で示される方法で、内燃機関の自動停止中のセンサ素子目標温度310に相関する目標インピーダンスに設定される。
【0182】
次に、内燃機関101の自動始動開始後である第四制御期間304では、図21(D)に示すように、実インピーダンス2104(Z_REAL)が第1の目標インピーダンス2101(Z_T1)に到達するまで、図21(C)に示すように、第4の目標印加実効電圧(例えば、許容最大印加実効電圧14V)を設定し、実インピーダンス2104(Z_REAL)を速やかに第1の目標インピーダンス2101(Z_T1)に到達させる。
なお、電源としてのバッテリを内燃機関の始動装置と共有するようなシステムにおいては、始動中のバッテリ電圧の低下などの制約を受けるため、その瞬間のバッテリ電圧値が最大印加実効電圧となる。
【0183】
次に、実インピーダンス2104(Z_REAL)が第1の目標インピーダンス2101(Z_T1)に到達後、第一制御期間301へと移行し、実インピーダンス2104(Z_REAL)が、第1の目標インピーダンス2101(Z_T1)となるような目標ヒータ印加実効電圧を設定する。
【0184】
次に、図22のフローチャートを用いて、この発明の実施の形態7における特徴的な制御
、即ち、内燃機関101の自動停止中、及び、自動始動後における目標ヒータ印加実効電圧の設定方法に関して、制御装置107での処理を説明する。
【0185】
まず、ステップS401において、キーオン等により制御装置107の初期化条件が成立したとき、ステップS402で、キーオンからキーオフまでの間の内燃機関101の自動停止/自動始動回数C_IS、自動停止開始からの経過時間T_IS_ON、及び、自動始動開始からの経過時間T_IS_OF、に0を格納し、初期化を行う。
【0186】
次にステップS403で、被水による素子割れ条件が成立した場合、ステップS2201で、排出ガスセンサの目標センサ素子インピーダンスZ_Tに、被水時の目標センサ素子インピーダンスZ_TWを格納し、ステップS2214に進む。
ここで、被水時の目標センサ素子インピーダンスZ_TWとして、被水しても素子割れを起こさないセンサ素子の余熱温度に相関するセンサ素子インピーダンスが設定される。
【0187】
ステップS403で、被水による素子割れ条件が不成立の場合、ステップS405で、内燃機関101の自動停止開始時であるかを判定する。ステップS405で自動停止開始時と判定された場合、ステップS406で、自動停止/自動始動回数C_ISの前回値に1を加算し、自動停止/自動始動回数C_ISに格納し、また、ステップS407で、自動始動開始からの経過時間T_IS_OFに0を格納することでT_IS_OFをリセットし、また、ステップS2202で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fに0を格納することでF_T2Fをリセットし、ステップS408へ進む。
一方、ステップS405で自動停止開始時と判定されなかった場合、ステップS408へ進む。
ここで、自動停止開始時とは、図21において、第一制御期間301から第二制御期間302に移行したタイミングである。
【0188】
次に、ステップS408で、自動停止/自動始動回数C_ISが1未満の場合、即ち、キーオン後、一度も内燃機関101の自動停止が行われていない場合、ステップS2203で、排出ガスセンサの目標センサ素子インピーダンスZ_Tに、第1の目標センサ素子インピーダンスZ_T1を格納し、ステップS2214に進む。
ここで、第1の目標センサ素子インピーダンスZ_T1には、内燃機関の運転中のセンサ素子目標温度308(例えば、排出ガスセンサが活性状態となる排出ガスセンサのセンサ素子温度)に相関するセンサ素子インピーダンスが設定される。
一方、ステップS408で、自動停止/自動始動回数C_ISが1以上の場合、即ち、キーオン後、1回以上、内燃機関101の自動停止が行われた場合、ステップS410へ進む。
【0189】
次に、ステップS410で、内燃機関101の自動停止中と判定されたとき、ステップS411で、自動停止開始からの経過時間T_IS_ONの前回値に演算処理周期を加算し、経過時間T_IS_ONに格納の上、ステップS2204に進む。
【0190】
次に、ステップS2204で、インピーダンス計測手段で計測した実インピーダンスZ_REALが、第3の目標センサ素子インピーダンスZ_T3以上であるとき、ステップS2205で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fに1を格納し、ステップS2206へ進む。一方、ステップS2204で、インピーダンス計測手段で計測した実インピーダンスZ_REALが、第3の目標センサ素子インピーダンスZ_T3未満であるとき、ステップS2206へ進む。
【0191】
次に、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0の場合、ステップS2207で、排出ガスセンサの目標センサ素子インピーダンスZ_Tに、第2の目標センサ素子インピーダンスZ_T2を格納し、ステップS2214に進む。一方、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0でない場合、ステップS2208で、排出ガスセンサの目標センサ素子インピーダンスZ_Tに、第3の目標センサ素子インピーダンスZ_T3を格納し、ステップS2214に進む。
ここで、第2の目標センサ素子インピーダンスZ_T2には、この間の消費電力を低減するため、第1の目標インピーダンス以上の目標インピーダンスが設定される。
また、ここで、第3の目標センサ素子インピーダンスZ_T3は、上記段落[0040]で示される方法で、内燃機関の自動停止中のセンサ素子目標温度310に相関する目標インピーダンスに設定される。
【0192】
ステップS410で、内燃機関101の自動停止中と判定されなかったとき、ステップ
S415に進み、ステップS415で内燃機関の自動始動開始時と判定された場合、ステップS416で、自動停止開始からの経過時間T_IS_ONに0を格納することでT_IS_ONをリセットし、また、ステップS2209で、第四制御期間が終了したことを示す第四制御期間終了フラグF_T4Fに0を格納することでF_T4Fをリセットし、ステップS417へ進む。一方、ステップS415で自動始動開始時と判定されなかった場合、ステップS417へ進む。
ステップS417で、自動始動開始からの経過時間T_IS_OFの前回値に演算処理周期を加算し、経過時間T_IS_OFに格納の上、ステップS418に進む。
ここで、自動始動開始時とは、図21において、第三制御期間303から第四制御期間304に移行したタイミングである。
【0193】
次に、ステップS2210で、インピーダンス計測手段で計測した実インピーダンスZ_REALが、第1の目標センサ素子インピーダンスZ_T1以下であるとき、ステップS2211で、第四制御期間が終了したことを示す第四制御期間終了フラグF_T4Fに1を格納し、ステップS2212へ進む。一方、ステップS2210で、インピーダンス計測手段で計測した実インピーダンスZ_REALが、第1の目標センサ素子インピーダンスZ_T1より大きいとき、ステップS2212へ進む。
【0194】
次に、ステップS2212で、第四制御期間が終了したことを示す第四制御期間終了フラグF_T4Fが0の場合、ステップS419で、ヒータ202への目標ヒータ印加実効電圧V_Tに、第4の目標印加実効電圧V_T4(例えば、許容最大印加実効電圧14V)を格納し、ステップS421に進む。一方、ステップS2212で、第四制御期間が終了したことを示す第四制御期間終了フラグF_T4Fが0でない場合、ステップS2213で、排出ガスセンサの目標センサ素子インピーダンスZ_Tに、第1の目標センサ素子インピーダンスZ_T1格納し、ステップS2214に進む。
【0195】
次に、ステップS2214で、排出ガスセンサの目標センサ素子インピーダンスZ_Tとなるよう排出ガスセンサの目標ヒータ印加実効電圧V_Tを設定する。
【0196】
次に、ステップS421で、ヒータ202への印加実行電圧を、目標ヒータ印加実効電圧V_Tとなるように制御して、図22における処理を終了する。
【0197】
以上のように、この発明の実施の形態7における排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段と、インピーダンス計測手段によって計測されたセンサ素子インピーダンスが、目標インピーダンスとなるようヒータへの印加実効電圧を設定する印加実効電圧設定手段を備え、印加実効電圧設定手段は、第一制御期間において、センサ素子インピーダンスが、内燃機関の運転中のセンサ素子目標温度に相関する第1の目標インピーダンスになるよう、第1の目標印加実効電圧を設定し、内燃機関の自動停止開始後、第二制御期間において、センサ素子インピーダンスが、第1の目標インピーダンスより高い第2の目標インピーダンスになるよう、第2の目標印加実効電圧を設定し、第二制御期間終了判定手段により、第二制御期間の終了判定後、第三制御期間において、センサ素子インピーダンスが、第2の目標インピーダンスより低く、内燃機関の自動停止中のセンサ素子目標温度に相関する第3の目標インピーダンスになるよう、第3の目標印加実効電圧を設定するよう構成している。
【0198】
また、この発明の実施の形態7における第二制御期間終了判定手段は、内燃機関の自動停止開始後、第二制御期間において、センサ素子インピーダンスが、第3の目標インピーダンスに到達した際に、第二制御期間の終了を判定する。
【0199】
また、この発明の実施の形態7における排出ガスセンサのヒータ制御装置は、排出ガスセンサの検出値に応じ、内燃機関への燃料噴射量を補正する燃料噴射量補正手段と、内燃機関の自動始動後、目標ヒータ印加実効電圧を、内燃機関の運転中のセンサ素子目標温度になるまで、第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、第四制御期間は、内燃機関の自動始動後、燃料噴射量補正手段が開始するまでに終了するよう設定され、第二制御期間、第三制御期間、第四制御期間におけるヒータ消費電力量の合計が最小となるよう設定される。
【0200】
以上述べた実施の形態7のように構成することで、実施の形態1と同様に、内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量を従来技術に比べ低減することができる。また、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にできるため、排出ガスを悪化させることがない。
【0201】
また、実施の形態7によれば、インピーダンス計測手段により計測されるセンサ素子インピーダンスがセンサ素子温度と相関のある目標インピーダンスになるよう、第1、第2、第3の目標印加実効電圧を決めることができ、適合試験などにより予め、第1、第2、第3の目標印加実効電圧を決める場合に比べ、排出ガスセンサ周辺環境に影響されず、排出ガスセンサの活性温度や自動停止中の保温温度をより正確に維持することができ、さらに消費電力量の低減が可能となる。
【0202】
実施の形態8.
次に、この発明の実施の形態8における排出ガスセンサのヒータ制御装置について説明する。本実施の形態8では、実施の形態7に対し、第2の目標印加実効電圧を、排出ガスセンサのセンサ素子インピーダンスを基に設定せず、0V、即ち、ヒータ停止とするものである。
【0203】
実施の形態8は、実施の形態7に対し、以下の点が異なるものである。
即ち、図23は、実施の形態8の特徴的な制御を説明するフローチャートで、実施の形態7の図22に対して、図23にはステップS2301が変更されている。
以下、図23における図22からの変更点に関し説明する。
【0204】
図23において、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0の場合、ステップS2301で、ヒータ202への目標ヒータ印加実効電圧V_Tに、第2の目標印加実効電圧として、0Vを格納し、ステップS421に進む。一方、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0でない場合、ステップS2208で、排出ガスセンサの目標センサ素子インピーダンスZ_Tに、第3の目標センサ素子インピーダンスZ_T3を格納し、ステップS2214に進む。
ステップS2206、S2301、S2208の上流、及び、下流のフローは実施の形態7における図22と同じである。
【0205】
以上のように、この発明の実施の形態8における排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段と、インピーダンス計測手段によって計測されたセンサ素子インピーダンスが、目標インピーダンスとなるようヒータへの印加実効電圧を設定する印加実効電圧設定手段を備え、第一制御期間において、センサ素子インピーダンスが、内燃機関の運転中のセンサ素子目標温度に相関する第1の目標インピーダンスになるよう、印加実効電圧設定手段により、第1の目標印加実効電圧が設定され、内燃機関の自動停止開始後、第二制御期間において、第1の目標印加実効電圧より低い第2の目標印加実効電圧、もしくは、0V(即ち、ヒータを停止)が設定され、第二制御期間中に、センサ素子インピーダンスが、第1の目標インピーダンスより高く、内燃機関の自動停止中のセンサ素子目標温度に相関する第3の目標インピーダンスに到達後、第三制御期間において、第3の目標インピーダンスを保持するよう、印加実効電圧設定手段により、第3の目標印加実効電圧が設定されるよう構成している。
【0206】
従って、実施の形態8のように構成することで、第二制御期間における消費電力量を0にすることができ、実施の形態7の発明に対し、さらに消費電力量を低減することができる。
【0207】
実施の形態9.
次に、この発明の実施の形態9における排出ガスセンサのヒータ制御装置について説明する。本実施の形態9では、実施の形態8に対し、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合について示し、実施の形態3とは、インピーダンス計測手段を備える点で構成が異なる。
【0208】
実施の形態9は、実施の形態8に対し、以下の点が異なるものである。
即ち、図24は、実施の形態9の特徴的な制御を説明するフローチャートで、実施の形態8の図23に対して、図24にはステップS2401〜S2406が追加され、ステップS2407が変更されている。
以下、図24における図23からの変更点に関し説明する。
【0209】
図24において、ステップS405で自動停止開始時と判定された場合、ステップS406で、自動停止/自動始動回数C_ISの前回値に1を加算し、自動停止/自動始動回数C_ISに格納し、ステップS407で、自動始動開始からの経過時間T_IS_OFに0を格納することでT_IS_OFをリセットし、また、ステップS2202で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fに0を格納することでF_T2Fをリセットし、ステップ、S2401で、自動停止開始時センサ周辺温度ET_Sに、内燃機関の自動停止開始時の排出ガスセンサの周辺温度ETを格納し、ステップS408へ進む。
一方、ステップS405で自動停止開始時と判定されなかった場合、ステップS408へ進む。
【0210】
次に、ステップS408からステップS2205までは、図23と同じ処理を行い、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0の場合、ステップS2301で、ヒータ202への目標ヒータ印加実効電圧V_Tに、第2の目標印加実効電圧として、0Vを格納し、ステップS421に進む。
一方、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0でない場合、ステップS2402へ進み、自動停止開始時センサ周辺温度ET_Sが、排出ガスセンサの周辺温度の基準値ET_NRMにばらつき許容量ET_Zを加算した値より大きいかを判定する。ステップS2402で、大きいと判定された場合は、ステップS2403で、センサ周辺温度が高いほど補正係数K_Aが大きくなるよう、例えば、下式(16)により、補正係数K_Aを演算し、ステップS2407へ進む。
【0211】
K_A=ET_G1×(1+(ET_S−(ET_NRM+ET_Z))÷ET_NRM) ・・・式(16)
ここで、ET_G1は、自動停止開始時センサ周辺温度ET_Sが、基準値ET_NRMより大きい場合のゲインである。
【0212】
次に、ステップS2402で大きくないと判定された場合は、ステップS2404で、自動停止開始時センサ周辺温度ET_Sが、排出ガスセンサの周辺温度の基準値ET_N
RMにばらつき許容量ET_Zを減算した値より小さいかを判定する。
ステップS2404で、小さいと判定された場合は、ステップS2405で、センサ周辺温度が低いほど補正係数K_Aが小さくなるよう、例えば、下式(17)により、補正係数K_Aを演算し、ステップS2407へ進む。
【0213】
K_A=ET_G2×(1+(ET_S−(ET_NRM+ET_Z))÷ET_NRM) ・・・式(17)
ここで、ET_G2は、自動停止開始時センサ周辺温度ET_Sが、基準値ET_NRMより小さい場合のゲインである。
【0214】
次に、ステップS2404で小さくないと判定された場合は、ステップS2406で、
補正係数K_Aに1を格納することで、排出ガスセンサの周辺温度にばらつきがある場合の補正を無効化し、ステップS2407へ進む。
補正係数K_Aの演算が完了すると、ステップS2407で、第3の目標インピーダンスに補正係数K_Aを乗算する。
【0215】
ここで、基準値ET_NRMとは、所定の環境下で予め定義した排出ガスセンサの周辺温度の基準値であり、センサ周辺温度が変動する前の基準値である。
なお、所定の環境下とは、例えば、内燃機関101から排出される排出ガスの温度、排出ガスセンサの取り付け位置周辺の排気管壁面温度、触媒104の温度、外気温、などが、それぞれ所定の温度の状態であることを指す。
【0216】
ここで、ばらつき許容量ET_Zとは、センサ周辺温度ETが基準値ET_NRMと異なったとしても、センサ素子温度への影響が小さく許容できる量を基準値からの差分で定義し、予め適合などにより設定する量である。
【0217】
なお、本実施の形態9では、ステップS2407で、自動停止開始時センサ周辺温度ET_Sと基準値ET_NRM±ばらつき許容量ET_Zとの差分に応じ、第3の目標インピーダンスに補正係数K_Aを乗算するような構成にしているが、自動停止開始時センサ周辺温度ET_Sと基準値ET_NRM±ばらつき許容量ET_Zとの差分に応じ、第3の目標インピーダンスに補正係数を加減算するような構成にしても同様の効果が得れる。
【0218】
ここで、図25、図26を用いて、排出ガスセンサの周辺温度が基準温度と異なる場合
、即ち、排出ガスセンサの周辺温度にばらつきがある場合に対し、実施の形態9により解決する課題とその効果を説明する。
【0219】
まず、図25を用いて、実施の形態9の補正、即ち、第3の目標インピーダンスを、センサ周辺温度が低いほど低く、高いほど高くする補正を実施しなかった場合の課題について説明する。
図25(F)において、第二制御期間302の直前、即ち、内燃機関101の自動停止開始直前のセンサ周辺温度は、自動停止開始直前の運転状態、内燃機関101から排出される排出ガスの温度、排出ガスセンサの取り付け位置周辺の排気管壁面温度、触媒104の温度、外気温、等に依存し、例えば、自動停止直前に、車両のアイドル状態、かつ、外気温が低いような場合、排気温度が低いため、センサ周辺温度も低い状態で自動停止が開始され、また、低い外気温により外部から排気管等を通じ冷やされ、センサ周辺温度は、基準となる基準値の挙動1101に対し、1102のように低くなる。一方、例えば、自動停止直前に、排気温度が高くなるような内燃機関の高負荷運転をしていた場合、排気温度が高いため、センサ周辺温度も高い状態で自動停止が開始され、センサ周辺温度は、基準となる基準値の挙動1101に対し、1103のように高くなる。
【0220】
ここで、実施の形態9の補正を実施しなかった場合、センサ素子温度は、センサ周辺温度の影響を受け、図25(E)のように、センサ周辺温度が低い1102の場合、センサ素子温度は2502のように低くなり、センサ周辺温度が高い1103の場合、センサ素子温度は2503のように高くなる。ここで、この影響が問題となるのは、内燃機関の自動停止後である第二制御期間302と、内燃機関の自動始動後である第四制御期間304である。即ち、第二制御期間302においては、第2の目標印加実効電圧を0Vに固定して温度を降温させているため、センサ周辺温度の違いによりセンサ素子温度の降温速度が変わり、また、第四制御期間304においては、目標印加実効電圧を許容最大印加実効電圧14Vに固定して温度を昇温させているため、センサ周辺温度の違いによりセンサ素子温度の昇温速度が変わる。
【0221】
特に、センサ周辺温度が低い1102の場合、第二制御期間においては、図25(E)の2502に示すとおり、センサ素子温度の降温速度が早くなり、第三制御期間へ早く移行することにより第三制御期間が長くなり、第三制御期間における消費電力量が大きくなる。また、センサ周辺温度が低いため、第3の目標インピーダンスを維持するための、即ち、内燃機関の自動停止中のセンサ素子目標温度310に保持するための目標印加実効電圧高くなり、第三制御期間における消費電力量が大きくなる。一方、第四制御期間においては、センサ素子温度の昇温速度が遅くなることで、第四制御期間長くなり、第四制御期間における消費電力量が大きくなる。また、第四制御期間が長くなることで、空燃比フィードバック制御開始までに排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できない恐れもある。
【0222】
次に、図26を用いて、実施の形態9の補正を実施した場合の効果について説明する。
まず、センサ周辺温度が基準のセンサ周辺温度1101より低い1102で示されるセンサ周辺温度の場合、自動停止開始時センサ周辺温度ET_Sと基準値ET_NRM−ばらつき許容量ET_Zとの差分に応じ、図26(D)の2605のように、第3の目標インピーダンスZ_T3は、基準の目標インピーダンス2604に比べ、低く補正される。これにより、図26(E)の2602のように第三制御期間中のセンサ素子温度は、内燃機関の自動停止中のセンサ素子目標温度310に保持する基準のセンサ素子温度2601に比べ高くなることで、第四制御期間におけるセンサ素子温度2602は、基準のセンサ素子温度2601の第四制御期間における挙動に近くなる。このため、空燃比フィードバック制御開始までにセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できるようになる。
【0223】
次に、センサ周辺温度が基準のセンサ周辺温度1101より高い1103で示されるセンサ周辺温度の場合、自動停止開始時センサ周辺温度ET_Sと基準値ET_NRM+ばらつき許容量ET_Zとの差分に応じ、図26(D)の2606のように、第3の目標インピーダンスZ_T3は、基準の目標インピーダンス2604に比べ、高く補正される。これにより、図26(E)の2603のように第三制御期間中のセンサ素子温度は、内燃機関の自動停止中のセンサ素子目標温度310に保持される基準のセンサ素子温度2601に比べ低くなることで、第四制御期間におけるセンサ素子温度2603は、基準のセンサ素子温度2601の第四制御期間における挙動に近くなる。このため、第三制御期間を短くできるとともに、第三制御期間中に第3の目標印加実効電圧を下げれることによる消費電力量の低減効果を得れる。
【0224】
以上のように、この発明の実施の形態9における排出ガスセンサのヒータ制御装置は、実施の形態8の発明に対し、排出ガスセンサの周辺温度を推定するセンサ周辺温度推定手段を備え、第3の目標インピーダンスは、センサ周辺温度推定手段によって推定されるセンサ周辺温度に応じて補正されるように構成している。
【0225】
実施の形態9のように構成することで、実施の形態8の発明に対し、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合において、第3の目標インピーダンスを、センサ周辺温度が低いほど低く、高いほど高くする補正することで、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にでき、排出ガスの悪化を防止する上、ヒータの消費電力量を低減できる。
【0226】
実施の形態10.
次に、この発明の実施の形態10における排出ガスセンサのヒータ制御装置について説明する。本実施の形態10では、実施の形態8に対し、さらに消費電力を低減する方法を示す。
【0227】
実施の形態10は、実施の形態8に対し、以下の点が異なるものである。
即ち、図27は、実施の形態10の特徴的な制御を説明するフローチャートで、実施の形態8の図23に対して、図27にはステップS2702、S2703が追加され、ステップS2701、S2704が変更されている。
以下、図27における図23からの変更点に関し説明する。
【0228】
図27において、ステップS410で、内燃機関101の自動停止中と判定されたとき
、ステップS411で、自動停止開始からの経過時間T_IS_ONの前回値に演算処理周期を加算し、経過時間T_IS_ONに格納の上、ステップS2701に進む。
【0229】
次に、ステップS2701で、インピーダンス計測手段で計測した実インピーダンスZ_REALが、第3の目標センサ素子インピーダンスZ_T3A以上であるとき、ステップS2702で、第二制御期間中の経過時間T1Aに、自動停止開始からの経過時間T_IS_ONを格納し、ステップS2205で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fに1を格納し、ステップS2206へ進む。一方、ステップS2701で、インピーダンス計測手段で計測した実インピーダンスZ_REALが、第3の目標センサ素子インピーダンスZ_T3A未満であるとき、ステップS2206へ進む。
【0230】
次に、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0の場合、ステップS2301で、ヒータ202への目標ヒータ印加実効電圧V_Tに、第2の目標印加実効電圧として、0Vを格納し、ステップS421に進む。一方、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0でないとき、即ち、第三制御期間であるとき、ステップS2703へ進み、下式(18)で示される内燃機関の自動停止開始からの経過時間が長くなるほど小さくなるような補正係数K_Z3を演算し、ステップS2704に進む。
【0231】
K_Z3=ISZ_G×(T_IS_ON−T1A)÷(T_IS_ON_MAX−T1A)+ISZ_OFST ・・・式(18)
【0232】
ステップS2704では、第3の目標センサ素子インピーダンスZ_T3Aに補正係数K_Z3乗算したものと、第3の目標センサ素子インピーダンスZ_T3の下限値Z_T3MINと比較し、大きい方を排出ガスセンサの目標センサ素子インピーダンスZ_Tに格納し、ステップS2214に進む。
【0233】
ここで、ゲインISZ_Gは、負の値とし、式(18)による補正値K_Z3が、内燃機関の自動停止開始からの経過時間が長くなるほど、小さくなるようにする。また、オフセット量ISZ_OFSTは、−1以上0以下の値とし、第3の目標センサ素子インピーダンスZ_T3Aに対し、どの程度オフセットさせるかを調整する。
【0234】
ここで、第3の目標センサ素子インピーダンスZ_T3の下限値Z_T3MINは、例えば、排出ガスセンサのセンサ素子の活性温度に相当するセンサ素子インピーダンスである第1の目標インピーダンス(Z_T1)、もしくは、それ以上の値に設定される。
【0235】
なお、第3の目標センサ素子インピーダンスZ_T3Aに補正係数K_Z3乗算したものと、第3の目標センサ素子インピーダンスZ_T3の下限値Z_T3MINと比較し、大きい方を目標センサ素子インピーダンスZ_Tに格納することで下限クリップを設けたが、下限値Z_T3MINと比較し大きい方を選択することをせず、第三制御期間開始から所定時間経過した時点で、その時点の目標センサ素子インピーダンスZ_T(=Z_T3A×K_Z3)でクリップする方法でもよい。
【0236】
さて、ステップS410で、内燃機関101の自動停止中と判定されなかったとき、ステップS415へと進み、以下、実施の形態8の図23と同じ処理となる。
【0237】
ここで、図28のタイムチャートを参照しながら、実施の形態10により解決する課題とその効果を説明する。
【0238】
まず、実施の形態10の補正を実施しなかった場合の課題について説明する。
内燃機関の自動停止開始後、運転者の車両発進意図があったとき(例えば、アクセルペダルやクラッチペダルの踏み込み、ブレーキペダルの解除、など)に自動始動するような自動停止/自動始動装置においては、いつ、自動停止が解除され自動始動されるかを、制御装置107は予め分からない。このため、実施の形態8では、第3の目標インピーダンスを、上記段落[0040]で示したような方法で、内燃機関の自動停止中のセンサ素子目標温度310に相関する目標インピーダンスに、固定値として設定し、どのタイミングで自動始動されても、空燃比フィードバック制御実施より前にセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できるように設定されている。
しかしながら、図28(F)のセンサ周辺温度2807に示すように、第三制御期間の前部では、第三制御期間の後部に比べ、センサ周辺温度が高い。このため、この第三制御期間の前部で自動始動があった場合、第三制御期間の後部で自動始動があった場合に比べ、自動始動後に、排出ガスセンサのセンサ素子温度が、内燃機関の運転中のセンサ素子目標温度308に到達する時間は短くなる。従って、第三制御期間の前部の第3の目標インピーダンスを、第三制御期間の後部の第3の目標インピーダンスに比べ、高く補正すれば、さらに消費電力を低減できる。
【0239】
また、電源としてのバッテリを内燃機関の始動装置と共有するようなシステムにおいては、始動中に始動装置が電力を必要とするため、始動中にバッテリ電圧の低下があり、図28(C)の2810に示すように、自動始動直後の第四制御期間に許容最大印加実効電圧(14V)をヒータへ印加することができない。このため、図28(E)の2805に示すように、自動始動直後の第四制御期間におけるセンサ素子温度の昇温速度が遅くなり
、空燃比フィードバック制御開始に遅れる可能性がある。又は、空燃比フィードバック制御開始タイミングに遅れないよう第3の目標インピーダンスを設定した場合、第四制御期間に常時、許容最大印加実効電圧(14V)を印加した場合に比べ、第3の目標インピーダンスを低く、即ち、内燃機関の自動停止中のセンサ素子目標温度を高く設定することとなり、消費電力量の増加を招く。
【0240】
次に、実施の形態10の補正を実施した場合の効果について説明する。
即ち、図28(D)の2802のように、第三制御期間の目標インピーダンスを第三制御期間の後部に比べ、第三制御期間の前部を高く補正することで、図28(G)の2807のように前部の消費電力量を低減することができ、この間に内燃機関の自動始動があった場合に、実施の形態8に比べ、消費電力量を低減することができる。
【0241】
また、図28(D)の2802のように、第三制御期間の後部の目標インピーダンスを第3の目標インピーダンス2103より低く補正することで、図28(C)の2804のように、第四制御期間の昇温のための印加実効電圧を低くすることができ、図28(G)の2809のように消費電力量を低減することができ、また、始動中におけるバッテリ電圧低下の影響を受けない。
【0242】
ここで、図28(G)の2808のように、第三制御期間の後部において消費電力量増加分があるが、2808と2809の差し引きの消費電力量が小さくなるように予め適合などにより、式(18)のゲインISZ_Gと、オフセット量ISZ_OFSTを設定する。
【0243】
つまり、最大自動停止時間T_IS_ON_MAXに対し、自動停止開始からの経過時間が長くなるにつれ、即ち、最大自動停止時間T_IS_ON_MAXに近づくにつれ、自動始動する可能性が高くなり、自動停止中の保温温度を上げておくことで、自動始動後の昇温のための消費電力を抑えることができ、また、自動始動直後の第四制御期間において、許容最大印加実効電圧(14V)以下の印加実効電圧でも空燃比フィードバック制御開始までにセンサ素子温度を昇温させることができ、始動中におけるバッテリ電圧の低下の影響を受けない。
【0244】
以上のように、この発明の実施の形態10における排出ガスセンサのヒータ制御装置は
、実施の形態8の発明に対し、第3の目標インピーダンスは、自動停止経過時間計測手段によって計測される自動停止開始からの経過時間が長いほど低く補正されるように構成されている。
【0245】
従って、実施の形態10によれば、実施の形態8に比べ、さらに消費電力を低減することができ、また、始動中におけるバッテリ電圧の低下の影響を受けることなく、空燃比フィードバック制御開始までにセンサ素子温度を昇温させることができる。
【0246】
実施の形態11.
次に、この発明の実施の形態11における排出ガスセンサのヒータ制御装置について説明する。
実施の形態11は、実施の形態7〜10に対し、センサ素子特性のばらつきや劣化による特性変化などにより、センサ素子温度とセンサ素子インピーダンスの関係が変化した場合においても、内燃機関の自動停止中におけるヒータ消費電力を低減し、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達遅延を防止し、空燃比フィードバック制御の開始タイミングが遅れず燃費や排出ガスの悪化を防止できるようにするものである。
【0247】
まず、図29のタイムチャートを参照しながら、この発明の実施の形態11に係る排出ガスセンサのヒータ制御装置112について説明する。
図29(A)は、制御装置107の自動停止/自動始動装置111による内燃機関101の自動停止の期間、及び、自動停止/自動始動のタイミングを示し、図29(B)は、制御装置107の空燃比制御装置110による空燃比フィードバック制御の開始/終了タイミングを示す。
【0248】
次に、内燃機関101の運転中である第一制御期間301では、図29(D)に示すように、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段によって計測された実インピーダンス2104(Z_REAL)が、内燃機関の運転中のセンサ素子目標温度308(例えば、排出ガスセンサが活性状態となる排出ガスセンサのセンサ素子温度)に相関する第1の目標インピーダンス2101(Z_T1)となるような目標ヒータ印加実効電圧を設定する。
【0249】
次に、内燃機関101の自動停止開始後である第二制御期間302では、図29(C)に示すように、ヒータへの印加実効電圧を0V(ヒータ停止)とすることで、センサ素子温度を下げ、実インピーダンス2104(Z_REAL)を内燃機関101の自動停止中のセンサ素子目標温度310に相関する第3の目標インピーダンス2103(Z_T3)に到達させる。
なお、制二制御期間302におけるヒータ停止期間は、実インピーダンス2104(Z_REAL)の第3の目標インピーダンス2103(Z_T3)へのフィードバック制御(例えば、PID制御)による操作量が、ヒータへの印加実効電圧の下限値0Vに制限されている期間でもよい。
【0250】
次に、図29(D)に示すように、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)に到達後、内燃機関101の自動始動まで、実インピーダンス2104(Z_REAL)が、第3の目標インピーダンス2103(Z_T3)となるような目標ヒータ印加実効電圧を設定する。
【0251】
次に、内燃機関101の自動始動開始後である第四制御期間304では、図29(D)に示すように、実インピーダンス2104(Z_REAL)が第1の目標インピーダンス2101(Z_T1)に到達するまで、図29(C)に示すように、第4の目標印加実効電圧(例えば、許容最大印加実効電圧14V)を設定し、実インピーダンス2104(Z_REAL)を速やかに第1の目標インピーダンス2101(Z_T1)に到達させる。
なお、電源としてのバッテリを内燃機関の始動装置と共有するようなシステムにおいては、始動中のバッテリ電圧の低下などの制約を受けるため、その瞬間のバッテリ電圧値が最大印加実効電圧となる。
【0252】
次に、実インピーダンス2104(Z_REAL)が第1の目標インピーダンス2101(Z_T1)に到達後、第一制御期間301へと移行し、実インピーダンス2104(Z_REAL)が、第1の目標インピーダンス2101(Z_T1)となるような目標ヒータ印加実効電圧を設定する。
【0253】
ここで、第1の目標インピーダンス2101(Z_T1)は、内燃機関101の運転中のセンサ素子目標温度308に相当するインピーダンスに設定される。
【0254】
また、第3の目標インピーダンス2103(Z_T3)は、例えば、内燃機関101の自動始動後、空燃比フィードバック制御のための空燃比検出要求開始時までに、第四制御期間における第4の目標印加実効電圧の印加により、第1の目標インピーダンス2101(Z_T1)に到達させ、かつ、第二制御期間302、第三制御期間303、第四制御期間304におけるヒータの消費電力量の合計311(図29(F)参照)が最小となるような、内燃機関101の自動停止中のセンサ素子目標温度310に相当するインピーダンスに予め適合試験などによって設定される。
なお、第三制御期間303における内燃機関101の自動停止中のセンサ素子目標温度310を低く設定するほど、第四制御期間304に昇温しなければならない温度幅が大きくなり、内燃機関101の運転中のセンサ素子目標温度308に到達するまでの時間が長くなると共に、第四制御期間304における消費電力量が大きくなるが、第三制御期間における消費電力量が小さくなる。
一方、第三制御期間303における内燃機関101の自動停止中のセンサ素子目標温度
310を高く設定するほど、第四制御期間304に昇温しなければならない温度幅が小さくなり、内燃機関101の運転中のセンサ素子目標温度308に到達するまでの時間が短くなると共に、第四制御期間304における消費電力量が小さくなるが、第三制御期間における消費電力量が大きくなる。
【0255】
次に、図30(a)は、センサ素子温度に対するセンサ素子インピーダンスの特性図を示す。
図30(a)に示すように、センサ素子インピーダンスのばらつき、又は、劣化により、同一インピーダンスにおいてもセンサ素子の実温度は異なる。
即ち、センサ素子インピーダンスが第1の目標インピーダンス2101と一致していたとしても、センサ素子の実温度は、ばらつき範囲3005のばらつきを有し、また、センサ素子インピーダンスが第3の目標インピーダンス2103と一致していたとしてもセンサ素子の実温度は、ばらつき範囲3006のばらつきを有す。例えば、インピーダンス初期下限品3001はインピーダンス劣化品3004に比べ実温度が低いことが分かる。
【0256】
図30(b)は、図29の第二制御期間302において、第1の目標インピーダンス2101(Z_T1)に制御している状態からヒータへの印加実効電圧を0V(ヒータ停止)とした後のセンサ素子インピーダンスの上昇を、経過時間に対して示した図である。
また、図30(c)は、図30(b)における経過時間に対し、センサ素子の実温度の変化を示した図である。
【0257】
センサ素子の実温度の変化は、図30(c)のセンサ素子の実温度変化3007のように、インピーダンス初期下限品3001、インピーダンス初期中央品3002、インピーダンス初期上限品3003、インピーダンス劣化品3004のいずれにおいても同じ(もしくは、実温度に対する、インピーダンスのセンサ素子特性のばらつきや劣化による特性変化に比べると、センサ素子の実温度の差は十分に小さい)であるが、図30(a)のようなセンサ素子特性のばらつきや劣化による特性変化により、センサ素子インピーダンスは、図30(b)に示すように、第3の目標インピーダンス2103(Z_T3)に到達するまでの時間が異なる。即ち、図30(b)によると、第1の目標インピーダンス2101(Z_T1)から第3の目標インピーダンス2103(Z_T3)に到達するまでの時間が、インピーダンス初期下限品3001で長く、インピーダンス劣化品3004で短いことが分かる。
【0258】
図31は、図30(a)、(b)と同じ特性図を用い、この発明の実施の形態11の特徴である、第3の目標インピーダンスをヒータ停止期間が短いほど高く、ヒータ停止期間が長いほど低く補正する理由を説明したものである。
図31(a)において、内燃機関の自動停止中にセンサ素子温度を実温度3101に制御するためには、インピーダンス初期中央品3002の場合、排出ガスセンサのヒータ制御装置112が計測したセンサ素子インピーダンスが、第3の目標インピーダンス2103になるようヒータへの印加実効電圧が調整される。
【0259】
しかし、例えば、インピーダンス初期下限品3001の場合、センサ素子インピーダンスが第3の目標インピーダンス2103になるようヒータへの印加実効電圧が調整されると、センサ素子の実温度は実温度3102Aとなる。そこで、インピーダンス初期下限品3001においても実温度3101に制御するためには、センサ素子インピーダンスが補正後の第3の目標インピーダンス3103Aになるようヒータへの印加実効電圧を調整すればよい。
また、例えば、インピーダンス初期上限品3003の場合、センサ素子インピーダンスが第3の目標インピーダンス2103になるようヒータへの印加実効電圧が調整されると、センサ素子の実温度は実温度3102Bとなる。そこで、インピーダンス初期上限品3003においても実温度3101に制御するためには、センサ素子インピーダンスが補正後の第3の目標インピーダンス3103Bになるようヒータへの印加実効電圧を調整すればよい。
【0260】
ここで、補正後の第3の目標インピーダンス3103A、3103Bは、図29の第二制御期間302における経過時間とセンサ素子インピーダンスの関係から決定できる。
即ち、図31(b)に示されるように、インピーダンス初期下限品3001においては、経過時間3105Aが経過時間3104と等しくなるよう第3の目標インピーダンスを下げる。
即ち、インピーダンス初期中央品3002の経過時間3104に対し、ヒータ停止期間が長いほど第3の目標インピーダンス2103を低く補正すればよい。また、インピーダンス初期上限品3003においては、経過時間3105Bが経過時間3104と等しくなるよう第3の目標インピーダンスを上げる。即ち、インピーダンス初期中央品の経過時間3104に対し、ヒータ停止期間が短いほど第3の目標インピーダンス2103を高く補正すればよい。
【0261】
次に、図32のフローチャートを用いて、本発明における特徴的な制御を説明する。
図32で示されるフローチャートのスタートからエンドは制御装置107の演算処理周期毎に毎回演算され、まず、ステップS3201において、キーオン等により制御装置107の初期化条件が成立したとき、ステップS3202で、図29(D)における第3の目標インピーダンス2103(Z_T3)に、第3の目標インピーダンス2103(Z_T3)の初期値(Z_T3INI)を格納し、ステップS3203で、図29における第二制御期間302の内、ヒータへの印加実効電圧を0V(ヒータ停止)としているヒータ停止期間(T_T2)に、ヒータ停止期間(T_T2)の初期値(T_T2INI)を格納する。
【0262】
ここで、第3の目標インピーダンス2103の初期値(Z_T3INI)は前記段落
[0254]に記載の方法で、予め適合試験などによって設定し、ヒータ停止期間の初期値(T_T2INI)は、図31におけるインピーダンス中央品3002が、第3の目標インピーダンス2103(Z_T3)に到達する時間を設定する。設定した各値は、制御装置107のROMに記憶され、前記ステップS3202、S3203で使用される。
【0263】
次に、ステップS3204において、自動停止/自動始動装置111による内燃機関101の自動停止開始時と判定された場合、ステップS3205で、自動停止後の経過時間T_HTRSTPに初期値0を、ステップS3206で、内燃機関101の今回の自動停止中に第3の目標インピーダンス2103(Z_T3)の補正が実施済であることを示す、フラグF_DONEに初期値0を、それぞれ格納する。
【0264】
次に、ステップS3207において、自動停止/自動始動装置111による内燃機関101の自動停止中と判定された場合、以下の処理を実施する。
即ち、ステップS3208において、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)より小さいとき、ステップS3209で、自動停止後の経過時間T_HTRSTPの前回値に演算周期を加算し、ステップS3210で、排出ガスセンサのヒータを停止する。
【0265】
一方、ステップS3208において、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)以上、かつ、ステップS3211でF_DONEが0、即ち、今回の自動停止中に第3の目標インピーダンス2103(Z_T3)の補正が未実施のとき、ステップS3212で、第3の目標インピーダンス2103(Z_T3)の補正実施条件が成立しているかを判定する。
【0266】
本実施の形態11における補正を実施するためには、排出ガスセンサの周辺雰囲気がある一定の条件下である必要がある。具体的には、吸気温、外気温、自動停止前の内燃機関の負荷状態、などが予め定められた条件の範囲内のときに第3の目標インピーダンス2103(Z_T3)の補正を許可する。
【0267】
次に、ステップS3213で、自動停止後の経過時間T_HTRSTPが、ヒータ停止期間(T_T2)にヒータ停止期間(T_T2)の上側の不感帯量に相当する不感帯T_T2DZ1を加算した値以上のとき、ステップS3214で、第3の目標インピーダンス2103(Z_T3)の前回値から減算補正量Z_C1を減算した値を補正後の第3の目標インピーダンス2103(Z_T3)として、第3の目標インピーダンス2103(Z_T3)に格納し、ステップS3217でF_DONEに1を格納した上で、ステップS3218で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)を維持するよう、排出ガスセンサのヒータ制御装置112によってヒータへの印加実効電圧が設定される。
【0268】
ステップS3215で、自動停止後の経過時間T_HTRSTPが、ヒータ停止期間(T_T2)にヒータ停止期間(T_T2)の下側の不感帯量に相当する不感帯T_T2DZ2を減算した値以下のとき、ステップS3216で、第3の目標インピーダンス2103(Z_T3)の前回値から加算補正量Z_C2を加算した値を補正後の第3の目標インピーダンス2103(Z_T3)として、第3の目標インピーダンス2103(Z_T3)に格納し、ステップS3217でF_DONEに1を格納した上で、ステップS3218で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)を維持するよう、排出ガスセンサのヒータ制御装置112によってヒータへの印加実効電圧が設定される。
【0269】
自動停止後の経過時間T_HTRSTPが不感帯内にあるとき、即ち、T_T2−T_T2DZ2<T_HTRSTP<T_T2+T_T2DZ1の関係にあるとき、ステップS3217でF_DONEに1を格納した上で、ステップS3218で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)を維持するよう、排出ガスセンサのヒータ制御装置112によってヒータへの印加実効電圧が設定される。
【0270】
一方、ステップS3211でF_DONEが0でない、即ち、今回の自動停止中に第3の目標インピーダンス2103(Z_T3)の補正が実施済のとき、ステップS3218で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)を維持するよう、排出ガスセンサのヒータ制御装置112によってヒータへの印加実効電圧が設定される。
【0271】
なお、上記実施の形態11において、加算補正量Z_C1、及び、減算補正量Z_C2は、あらかじめ適合試験などによって設定された値とする。
【0272】
ここで、図33を用いて、実施の形態11による内燃機関の自動停止中のヒータ消費電力低減効果について、実際のセンサ素子温度がセンサ素子インピーダンスから推定する推定センサ素子温度より高くなる場合、即ち、インピーダンス初期中央品3002に対し、劣化によりインピーダンス劣化品3004に特性変化した場合を例に説明する。
【0273】
まず、実施の形態11による第3の目標インピーダンス2103(Z_T3)の補正を実施しない場合、図33(D)のように、機関自動停止後、第3の目標インピーダンスに到達してから機関自動始動までの間、即ち、第三制御期間303におけるインピーダンス劣化品(目標インピーダンス補正なし)3302の実インピーダンス3305と、第三制御期間303aにおけるインピーダンス初期中央品3303の実インピーダンス3306は、ヒータ制御装置112によって同じ値になるよう調整されるが、図33(E)のように、第三制御期間303におけるインピーダンス劣化品(目標インピーダンス補正なし)3302の実センサ素子温度3308は、第三制御期間303aにおけるインピーダンス初期中央品3303の実センサ素子温度3309に対し、高くなっている。このため、この高い実センサ素子温度3308を維持するようヒータ制御装置112によってヒータへの印加実効電圧が調整され、図33(F)のように、インピーダンス劣化品(目標インピーダンス補正なし)3302のヒータ消費電力は、インピーダンス初期中央品3303に対し、高くなっている。このため、インピーダンス劣化品(目標インピーダンス補正なし)3302のセンサ素子温度をインピーダンス初期中央品3303相当に下げると消費電力を低減することができる。
【0274】
そこで、実施の形態11による第3の目標インピーダンス2103(Z_T3)の補正を実施する。即ち、内燃機関の自動停止毎に、第二制御期間302が短いほど第3の目標インピーダンスを高く補正すると、最終的に、インピーダンス劣化品(目標インピーダンス補正なし)3302における第二制御期間302は第二制御期間302aに、第三制御期間303は第三制御期間303aになり、図33(D)のように、インピーダンス劣化品(目標インピーダンス補正なし)3302の実インピーダンス3305は、インピーダンス劣化品(目標インピーダンス補正後)3301の実インピーダンス3304のようになり、図33(E)のように、第三制御期間303aにおけるインピーダンス劣化品(目標インピーダンス補正後)3301の実センサ素子温度3307は、第三制御期間303aにおけるインピーダンス初期中央品3303の実センサ素子温度3309と、等しくなる。結果、図33(F)に示すように、インピーダンス劣化品(目標インピーダンス補正後)3301は、消費電力低減量3310だけ内燃機関の自動停止中のヒータ消費電力量を低減でき、インピーダンス初期中央品3303相当のヒータ消費電力にすることができる。
【0275】
次に、図34を用いて、実施の形態11による、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達遅延を防止し、空燃比フィードバック制御の開始タイミングが遅れず燃費や排出ガスの悪化を防止する効果について、実際のセンサ素子温度がセンサ素子インピーダンスから推定する推定センサ素子温度より低くなる場合、即ち、センサ素子特性のばらつきにより、センサ素子特性が、インピーダンス初期中央品3002に対し、インピーダンス初期下限品3001であった場合を例に説明する。
【0276】
まず、実施の形態11による第3の目標インピーダンス2103(Z_T3)の補正を実施しない場合、図34(D)のように、機関自動停止後、第3の目標インピーダンスに到達してから機関自動始動までの間、即ち、第三制御期間303におけるインピーダンス初期下限品(目標インピーダンス補正なし)3402の実インピーダンス3405と、第三制御期間303aにおけるインピーダンス初期中央品3403の実インピーダンス3406は、ヒータ制御装置112によって同じ値になるよう調整されるが、図34(E)のように、第三制御期間303におけるインピーダンス初期下限品(目標インピーダンス補正なし)3402の実センサ素子温度3408は、第三制御期間303aにおけるインピーダンス初期中央品3403の実センサ素子温度3409に対し、低くなっている。このため、機関自動始動後に許容最大印加実効電圧を与え実温度を昇温させたとしても、インピーダンス初期下限品(目標インピーダンス補正なし)3402の実センサ素子温度3408は、インピーダンス初期中央品3403の実センサ素子温度3409に対し、昇温が遅く、実インピーダンス値は実センサ素子温度に応じた値となるため、インピーダンス初期下限品(目標インピーダンス補正なし)3402の実インピーダンス3405は、インピーダンス初期中央品3403の実インピーダンス3406に対し、第1の目標インピーダンス2101(Z_T1)への到達が遅れる。
【0277】
空燃比フィードバック制御実施条件の一つとして、実インピーダンスからセンサ素子温度を推定し、推定したセンサ素子温度よりセンサが活性状態であると判定されている必要があるが、図34(B)のように、インピーダンス初期下限品(目標インピーダンス補正なし)3402は、インピーダンス初期中央品3403に対し、機関自動始動後、空燃比フィードバック制御実施条件成立が遅れ、結果、空燃比フィードバック制御実施条件成立が遅れた間の燃費や排出ガスが悪化する。このため、インピーダンス初期下限品(目標インピーダンス補正なし)3402のセンサ素子温度をインピーダンス初期中央品3403相当に上げると、空燃比フィードバック制御実施条件成立の遅れによる燃費や排出ガスの悪化を防止できる。
【0278】
そこで、実施の形態11による第3の目標インピーダンス2103(Z_T3)の補正を実施する。即ち、第二制御期間302が長いほど第3の目標インピーダンスを低く補正すると、内燃機関の自動停止毎に補正が実施され、最終的に、インピーダンス初期下限品(目標インピーダンス補正なし)3402における第二制御期間302は第二制御期間302aに、第三制御期間303は第三制御期間303aになり、図34(D)のように、インピーダンス初期下限品(目標インピーダンス補正なし)3402の実インピーダンス3405は、インピーダンス初期下限品(目標インピーダンス補正後)3401の実インピーダンス3404のようになり、図34(E)のように、第三制御期間303aにおけるインピーダンス初期下限品(目標インピーダンス補正後)3401の実センサ素子温度3407は、第三制御期間303aにおけるインピーダンス初期中央品3403の実センサ素子温度3409に対し、等しくなる。結果、図34(B)に示すように、インピーダンス初期下限品(目標インピーダンス補正後)3401は、内燃機関の自動始動後における空燃比の検出要求に対し、センサ素子温度の活性温度への到達遅延を防止し、空燃比フィードバック制御の開始タイミングが遅れず燃費や排出ガスの悪化を防止できる。
【0279】
なお、内燃機関の自動停止中の実センサ素子温度が高いことによるヒータ消費電力の増加と、内燃機関の自動停止中の実センサ素子温度が低いことによる機関自動始動後の空燃比フィードバック制御の開始タイミング遅れの間の燃費や排ガスの悪化は、いわゆるトレードオフの関係にあるが、上記段落[0254]のように、予め、内燃機関の自動停止中のヒータ消費電力、及び、内燃機関の自動始動後の燃費や排ガスの悪化、を抑制できる内燃機関の自動停止中のセンサ素子温度を確認し、自動停止中の実際のセンサ素子温度をこの確認したセンサ素子温度になるよう、実施の形態11により第3の目標インピーダンスを補正することで、センサ素子特性のばらつきや劣化による特性変化などで、センサ素子温度とセンサ素子インピーダンスの関係が変化した場合においても、予め確認した機関自動停止中のヒータ消費電力、及び、機関自動始動後の燃費や排ガスの悪化、を抑制できる性能を維持することができる。
【0280】
以上のように、この発明の実施の形態11の排出ガスセンサのヒータ制御装置は、実施の形態7〜10の発明に対し、第二制御期間の基準期間である基準第二制御期間を備え、第3の目標インピーダンスは、第二制御期間が、基準第二制御期間より、短いほど高く、長いほど低く、補正されるよう構成している。
【0281】
このため、センサ素子特性のばらつきや劣化による特性変化などにより、センサ素子温度とセンサ素子インピーダンスの関係が変化した場合においても、内燃機関の自動停止中の実際のセンサ素子温度を目標温度に保つことで、実際のセンサ素子温度が推定センサ素子温度より高かった場合には、内燃機関の自動停止中におけるヒータ消費電力をさらに低減でき、実際のセンサ素子温度が推定センサ素子温度より低かった場合には、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達遅延を防止でき、空燃比フィードバック制御の開始タイミングが遅れず燃費や排出ガスの悪化を防止できる。
【0282】
また、内燃機関の自動停止中のヒータ停止期間で第3の目標インピーダンスを補正することで、例えば、排出ガスセンサの周辺温度といった排出ガスセンサの周辺雰囲気が補正毎に大きく異なることなく、より正確な補正を実行することが可能となる。
【0283】
さらに、内燃機関の自動停止毎に第3の目標インピーダンスを補正することができるため、キーオフなどにより内燃機関を停止したときを利用して同様の補正を実施する場合に比べ、補正する機会が多く、より正確な補正を実行することが可能となる。
【0284】
実施の形態12.
次に、この発明の実施の形態12に係る排出ガスセンサのヒータ制御装置について説明する。実施の形態12は、実施の形態11に対し、より正確に第3の目標インピーダンスを補正できるようにしたものである。
【0285】
実施の形態12は、実施の形態11に対し、以下の点が異なる。
即ち、図35は、実施の形態12の特徴的な制御を説明するフローチャートで、実施の形態11の図32に対して、図35には、ステップS3501が追加されたものである。
以下、図35における図32からの変更点に関し説明する。
【0286】
図35において、ステップS3208で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)より小さいと判定され、ステップS3501で実インピーダンス2104(Z_REAL)が、第3の目標インピーダンス2103(Z_T3)に到達するまでの第一の通過点であるインピーダンスA2901(Z_TA)より大きく、かつ、第3の目標インピーダンス2103(Z_T3)に到達するまでの第二の通過点であるインピーダンスB2902(Z_TB)以下の場合、ステップS3209で、自動停止後の経過時間T_HTRSTPの前回値に演算周期を加算し、ステップS3210で、排出ガスセンサのヒータを停止する。
【0287】
一方、ステップS3501において、実インピーダンス2104(Z_REAL)が、第3の目標インピーダンス2103(Z_T3)に到達するまでの第一の通過点であるインピーダンスA2901(Z_TA)以下、又は、第3の目標インピーダンス2103(Z_T3)に到達するまでの第二の通過点であるインピーダンスB2902(Z_TB)より大きい場合、ステップS3209を実施せずに、ステップS3210で排出ガスセンサのヒータを停止する。
【0288】
ここで、第3の目標インピーダンス2103(Z_T3)に到達するまでの第一の通過点であるインピーダンスA2901(Z_TA)は、制御装置107の自動停止/自動始動装置111による内燃機関101の自動停止開始後の排出ガスセンサのヒータ停止期間、即ち、図29における第二制御期間302の中で設定され、ヒータ停止開始直後の実インピーダンス2104(Z_REAL)の上昇が遅い部分(区間A)を除くように、予め適合試験などにより設定する。
また、第3の目標インピーダンス2103(Z_T3)に到達するまでの第二の通過点であるインピーダンスB2902(Z_TB)は、第一の通過点であるインピーダンスA2901(Z_TA)を通過後、第3の目標インピーダンス2103(Z_T3)に到達直前にあたるインピーダンスを予め適合試験などにより設定する。
このように設定することにより、実インピーダンス2104(Z_REAL)の変化の大きい部分を使用しての補正ができ、より正確に補正を行うことができる。
【0289】
なお、実施の形態12におけるヒータ停止期間の初期値T_T2INIは、図31のインピーダンス中央品3002において、第一の通過点であるインピーダンスA2901(Z_TA)から第二の通過点であるインピーダンスB2902(Z_TB)に到達するまでの時間が設定される。設定値は、制御装置107のROMに記憶され、ステップS3203で使用される。
【0290】
なお、実施の形態12におけるインピーダンスB2902(Z_TB)は、第3の目標インピーダンス2103(Z_T3)と同値にしても、実施の形態12における効果を得ることができる。
【0291】
以上のように、この発明の実施の形態12によれば、実施の形態11の発明に対し、第二制御期間にセンサ素子インピーダンスが上昇し、第3の目標インピーダンスに到達するまでの第一の通過点であるインピーダンスAと、センサ素子インピーダンスがインピーダンスAを通過後、第3の目標インピーダンスに到達前の第二の通過点であるインピーダンスBと、インピーダンスAからインピーダンスBに到達するまでの経過時間を計測する経過時間計測手段と、経過時間計測手段によって計測される経過時間の基準値である基準経過時間を備え、第3の目標インピーダンスは、経過時間計測手段によって計測される経過時間が、基準経過時間より短いほど高く、長いほど低く、補正されるよう構成しているので、実施の形態11の効果に加え、ヒータ停止期間の内、センサ素子インピーダンスの変化が大きい部分の経過時間を使用して第3の目標インピーダンスを補正することができ、より正確な補正を実行することが可能となる。
【0292】
実施の形態13.
次に、この発明の実施の形態13における排出ガスセンサのヒータ制御装置について説明する。実施の形態13は、実施の形態12に対し、以下の点が異なるものである。
即ち、図36は、実施の形態13の特徴的な制御を説明するフローチャートで、実施の形態12の図35に対して、図36にはステップS3602が追加され、ステップS3601、S3603、S3604が変更されている。
以下、図36における図35からの変更点に関し説明する。
【0293】
図36において、ステップS3212で、第3の目標インピーダンス2103(Z_T3)の補正実施条件が成立している場合、ステップS3602で、所定時間あたりのインピーダンスの変化量を下式(19)にて算出し、Z_DLTに格納する。
(Z_TB − Z_TA)÷ T_HTRSTP=Z_DLT・・・式(19)
【0294】
次に、ステップS3603で、所定時間あたりのインピーダンスの変化量Z_DLTが、基準変化量Z_BDLTに、基準変化量Z_BDLTの下側の不感帯量に相当する不感帯Z_BDLTDZ2を減算した値以下のとき、ステップS3214で、第3の目標インピーダンス2103(Z_T3)の前回値から減算補正量Z_C1を減算した値を補正後の第3の目標インピーダンス2103(Z_T3)として、第3の目標インピーダンス2103(Z_T3)に格納し、ステップS3217でF_DONEに1を格納した上で、ステップS3218で、実インピーダンス2104(Z_REAL)が、第3の目標インピーダンス2103(Z_T3)を維持するようヒータへの印加実効電圧が設定される。
【0295】
ステップS3604で、所定時間あたりのインピーダンスの変化量Z_DLTが、基準変化量Z_BDLTに、基準変化量Z_BDLTの上側の不感帯量に相当する不感帯Z_BDLTDZ1を加算した値以上のとき、ステップS3216で、第3の目標インピーダンス2103(Z_T3)の前回値から加算補正量Z_C2を加算した値を補正後の第3の目標インピーダンス2103(Z_T3)として、第3の目標インピーダンス2103(Z_T3)に格納し、ステップS3217でF_DONEに1を格納した上で、ステップS3218で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)を維持するようヒータへの印加実効電圧が設定される。
【0296】
所定時間あたりのインピーダンスの変化量Z_DLTが不感帯内にあるとき、即ち、Z_BDLT−Z_BDLTDZ2<Z_DLT<Z_BDLT+Z_BDLTDZ1の関係にあるとき、ステップS3217でF_DONEに1を格納した上で、ステップS3218で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)を維持するようヒータへの印加実効電圧が設定される。
【0297】
なお、基準変化量Z_BDLTには、ステップS3601で、基準変化量初期値Z_BDLTINIが格納される。
また、基準変化量初期値Z_BDLTINIには、図31のインピーダンス中央品3002において、第一の通過点であるインピーダンスA2901(Z_TA)と第二の通過点であるインピーダンスB2902(Z_TB)の差分を、第一の通過点であるインピーダンスA2901(Z_TA)から第二の通過点であるインピーダンスB2902(Z_TB)に到達するまでの時間で除算したものである。基準変化量初期値Z_BDLTINIは、制御装置107のROMに記憶され、前記ステップS3601で使用される。
【0298】
以上のように、この発明の実施の形態13は、実施の形態12の発明に対し、第3の目標インピーダンスは、インピーダンスAからインピーダンスBまでの所定時間あたりのインピーダンス変化量が、インピーダンスAからインピーダンスBまでの所定時間あたりのインピーダンス変化量の基準値に対し、大きいほど高く、小さいほど低く、補正されるよう構成したものである。
【0299】
これにより、第二制御期間であるヒータ停止期間の内、センサ素子インピーダンスの変化が大きい部分の所定時間あたりのインピーダンス変化量を使用して第3の目標インピーダンスを補正することができ、より正確な補正を実行することが可能となる。
【0300】
実施の形態14.
次に、この発明の実施の形態14に係る排出ガスセンサのヒータ制御装置について説明する。実施の形態4は、実施の形態11に対し、以下の点が異なるものである。
即ち、図37は、実施の形態4の特徴的な制御を説明するフローチャートで、実施の形態11の図32に対して、図37には、ステップS3701〜S3713が追加されている。
以下、図37における図32からの変更点に関し説明する。
【0301】
図37において、ステップS3201で初期化条件が成立したとき、ステップS3701、S3702の初期化を追加する。即ち、ステップS3701で、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段によって計測可能な最大のインピーダンスの初期値(Z_MAXINI)をZ_MAXに格納し、ステップS3702で、ヒータ制御装置112により、第3の目標インピーダンス2103(Z_T3)となるようヒータへの印加実効電圧を設定するのではなく、ヒータ停止期間(第二制御期間302)に応じて、ヒータへの印加実効電圧を直接設定する手段を実施中であることを示すフラグ(F_VEXE)に0を格納する。
【0302】
インピーダンス計測手段によって計測可能な最大のインピーダンスの初期値(Z_MAXINI)は、例えば、設計したセンサ素子などのハードウェアの構成の制約により決めることが可能である。もしくは、インピーダンス計測手段によって計測されるインピーダンスの計測精度が高い範囲の上限を設定してもよい。
【0303】
その後、ステップS3204〜S3213までの間、実施の形態11と同じ処理を行い、ステップS3213で、自動停止後の経過時間T_HTRSTPが、ヒータ停止期間(T_T2)にヒータ停止期間(T_T2)の上側の不感帯量に相当する不感帯T_T2DZ1を加算した値以上でないと判定され、ステップS3215で、自動停止後の経過時間T_HTRSTPが、ヒータ停止期間(T_T2)にヒータ停止期間(T_T2)の下側の不感帯量に相当する不感帯T_T2DZ2を減算した値以下と判定されたとき、ステップS3703で、第3の目標インピーダンス2103(Z_T3)の前回値から加算補正量Z_C2を加算した値が、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段によって計測可能な最大のインピーダンスZ_MAXより大きいかを判定し、大きいと判定された場合、ステップS3704で、ヒータ停止期間(第二制御期間302)に応じてヒータへの印加実効電圧を直接設定する手段を実施中であることを示すフラグ(F_VEXE)に1を格納する。
【0304】
次に、ステップS3705で、F_VEXEの前回値が0と判定された場合、ステップS3706で、インピーダンス計測手段によって計測可能な最大のインピーダンスZ_MAXを維持するために必要なヒータへの印加実行電圧として、V_MAXにヒータへの印加実効電圧の前回値を格納し、ステップS3707で、ヒータへの印加実効電圧V_T3にV_MAXを格納する。
一方、ステップS3705で、F_VEXEの前回値が0でないと判定された場合、ステップS3708で、ヒータへの印加実効電圧V_T3の前回値から減算補正量V_C2を減算した値をヒータへの印加実効電圧として、ヒータへの印加実効電圧V_T3に格納する。また、ステップS3703で、第3の目標インピーダンス2103(Z_T3)の前回値から加算補正量Z_C2を加算した値が、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段によって計測可能な最大のインピーダンスZ_MAXより大きくないと判定された場合、ステップS3216へ進み、実施の形態11と同じ処理を行う。
【0305】
一方、ステップS3213で、自動停止後の経過時間T_HTRSTPが、ヒータ停止期間(T_T2)にヒータ停止期間(T_T2)の上側の不感帯量に相当する不感帯T_T2DZ1を加算した値以上と判定された場合、ステップS3709で、第3の目標インピーダンス2103(Z_T3)の前回値から減算補正量Z_C1を減算した値が、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段によって計測可能な最大のインピーダンスZ_MAX以下であるかを判定し、Z_MAX以下でないと判定された場合、ステップS3710で、ヒータへの印加実効電圧V_T3の前回値に加算補正量V_C1を加算した値をヒータへの印加実効電圧として、ヒータへの印加実効電圧V_T3に格納する。
一方、ステップS3709で、Z_MAX以下と判定された場合、ステップS3711で、ヒータ停止期間(第二制御期間302)に応じてヒータへの印加実効電圧を直接設定する手段を実施中であることを示すフラグ(F_VEXE)に0を格納した上で、ステップS3214へ進み、実施の形態11と同じ処理を行う。
【0306】
ステップS3707、S3708、S3709の何れかで、ヒータへの印加実効電圧V_T3にヒータへの印加実効電圧の今回値が格納された後、ステップS3712で、F_DONEに1を格納し、ステップS3713で、ヒータへ印加実効電圧V_T3が印加される。
【0307】
なお、上記実施の形態14において、加算補正量V_C1、及び、減算補正量V_C2は、あらかじめ適合試験などによって設定された値とする。
【0308】
以上のように、この発明の実施の形態14は、実施の形態11の発明に対し、インピー
ダンス計測手段によって計測可能な最大のインピーダンス以上に、第3の目標インピーダンスを設定する場合、第二制御期間に応じて目標ヒータ印加実効電圧を設定するよう構成したものである。
【0309】
センサ素子インピーダンスは、低温であるほど、センサ素子温度の変化に対するセンサ素子インピーダンスの変化が大きくなる特性を有し、この低温域までインピーダンスを計測する場合、高温域と低温域とで、計測感度(言い換えると、分解能)を変えたり、目標インピーダンスにフィードバック制御する際のフィードバックゲインを変えたりする必要があるが、実施の形態14の発明によれば、コストアップにつながるハードウェアの追加変更の必要なく低温域に制御することが可能となる。
【0310】
実施の形態15.
次に、この発明の実施の形態15に係る排出ガスセンサのヒータ制御装置について説明する。実施の形態15は、実施の形態12において、以下の点が異なるものである。
即ち、図38は、実施の形態15の特徴的な制御を説明するフローチャートで、実施の形態12の図35に対して、図38には、ステップS3801〜S3803が追加されている。
以下、図38における図35からの変更点に関し説明する。
【0311】
図38において、ステップS3201で初期化条件が成立したとき、ステップS3801で、排出ガスセンサが故障していることを示す排出ガスセンサ故障フラグF_FAILに0を格納し、初期化を実施する。
【0312】
その後、ステップS3204〜S3216までの間、実施の形態12と同じ処理を行い、ステップS3214、又は、ステップS3216で、第3の目標インピーダンス2103(Z_T3)が更新されたとき、ステップS3802で、自動停止後の経過時間T_HTRSTPが、インピーダンス正常品の場合の自動停止後の経過時間の下限値T_FAILより短いかを判定する。
ステップS3802で短いと判定された場合、排出ガスセンサが故障していると判定し、ステップS3803で、排出ガスセンサ故障フラグF_FAILに1を格納した上でステップS3217へ進み、以降、実施の形態12と同じ処理を行う。
一方、ステップS3802で短くないと判定された場合は、ステップS3217へ進み、実施の形態12と同じ処理を行う。
【0313】
以上のように、この発明の実施の形態15は、実施の形態12におけるインピーダンスAからインピーダンスBまでの経過時間の短さ、又は、実施の形態13におけるインピーダンスAからインピーダンスBまでの所定時間あたりのインピーダンス変化量の大きさ、に基づいて、排出ガスセンサの故障判定を行うよう構成したものである。
【0314】
これにより、内燃機関の自動停止中のヒータ停止期間に排出ガスセンサの故障判定を行うことで、例えば、排出ガスセンサの周辺温度といった排出ガスセンサの周辺雰囲気に影響されることなく、より正確に判定することが可能となり、また、故障判定頻度も増やすことができる。
【0315】
なお、上記実施の形態11〜15においては、キーオフ時に第3の目標インピーダンス2103(Z_T3)を初期値Z_T3INIに格納した上で、第3の目標インピーダンス2103の初期値(Z_T3INI)を書き換え可能な不揮発性メモリに記憶させ、次回キーオン初期化時にこのZ_T3INIを使用してもよい。
【0316】
なお、上記実施の形態1〜15における排出ガスセンサ105、及び、排出ガスセンサ
106は、排出ガス中の空燃比を検出するもの(いわゆるリニアA/Fセンサ)、又は、理論空燃比に対しリッチ/リーンの傾向を検出するのもの(いわゆるλO2センサ)のいずれであってもよい。
【符号の説明】
【0317】
101…内燃機関、102…吸気通路、103…排気通路、104…触媒、
105…第1の排出ガスセンサ、106…第2の排出ガスセンサ、107…制御装置、
108…各種センサ、109…インジェクタ、110…空燃比制御装置、
111…自動停止/自動始動装置、112…排出ガスセンサのヒータ制御装置、
AF1…第一の空燃比に対応した検出信号、AF2…第二の空燃比に対応した検出信号、
201…センサ素子、202…ヒータ、301…第一制御期間、302…第二制御期間、
303…第三制御期間、304…第四制御期間、305…第1の目標印加実効電圧、
306…第2の目標印加実効電圧、307…第3の目標印加実効電圧、
308…センサ素子目標温度(内燃機関運転中)、
309…排出ガスセンサの活性下限温度、
310…センサ素子目標温度(内燃機関自動停止中)、
311…第二/第三/第四制御期間におけるヒータの消費電力量の合計、
T1…第二制御期間終了時間、T2…第四制御期間終了時間、
2101…第1の目標インピーダンス(Z_T1)、
2102…第2の目標インピーダンス(Z_T2)、
2103…第3の目標インピーダンス(Z_T3)、
2104…実インピーダンス(Z_REAL)、
2901…インピーダンスA(Z_TA)、2902…インピーダンスB(Z_TB)、
3001…インピーダンス初期下限品、3002…インピーダンス初期中央品、
3003…インピーダンス初期上限品、3004…インピーダンス劣化品、
3005…ばらつき範囲、3006…ばらつき範囲、
3007…センサ素子の実温度変化、
3101、3102A、3102B…センサ素子の実温度、
3103A、3103B…補正後の第3の目標インピーダンス、
3104、3105A、3105B…ヒータへの印加実効電圧を0Vとしてからの経過時間、
3301…インピーダンス劣化品(目標インピーダンス補正後)、
3302…インピーダンス劣化品(目標インピーダンス補正なし)、
3303…インピーダンス初期中央品、
3304…インピーダンス劣化品(目標インピーダンス補正後)の実インピーダンス、
3305…インピーダンス劣化品(目標インピーダンス補正無)の実インピーダンス、
3306…インピーダンス初期中央品の実インピーダンス、
3307…インピーダンス劣化品(目標インピーダンス補正後)の実センサ素子温度、
3308…インピーダンス劣化品(目標インピーダンス補正無)の実センサ素子温度、
3309…インピーダンス初期中央品の実センサ素子温度、
3310…消費電力低減量、
3401…インピーダンス初期下限品(インピーダンス補正後)、
3402…インピーダンス初期下限品(インピーダンス補正なし)、
3403…インピーダンス初期中央品、
3404…インピーダンス初期下限品(インピーダンス補正後)の実インピーダンス、
3405…インピーダンス初期下限品(インピーダンス補正無)の実インピーダンス、
3406…インピーダンス初期中央品の実インピーダンス、
3407…インピーダンス初期下限品(インピーダンス補正後)の実センサ素子温度、
3408…インピーダンス初期下限品(インピーダンス補正無)の実センサ素子温度、
3409…インピーダンス初期中央品の実センサ素子温度。
【技術分野】
【0001】
この発明は、排出ガスセンサのヒータ制御装置を備えた内燃機関の制御装置に係り、特に、内燃機関の自動停止中(アイドルストップ中)における排出ガスセンサのヒータ制御装置に関するものである。
【背景技術】
【0002】
低炭素社会への取り組みから、車両用内燃機関においても二酸化炭素(CO2)排出量を削減する技術が待望されており、近年、車両の停止アイドリング中に内燃機関を自動停止(アイドルストップ)させることでCO2排出量を削減させる技術などが盛んである。
【0003】
この内燃機関の自動停止中に、作動させる必要のない電気負荷に対する電源供給を遮断することで、バッテリ電力の消費電力量を低減する技術が、例えば、特開2001−295678公報に開示されている。即ち、内燃機関停止中の消費電力量を低減することで内燃機関運転中にバッテリに充電する必要発電量を削減し、発電機による発電の内燃機関にかかる負荷を低減することで燃料消費量を低減し、引いてはCO2排出量を削減することができる。
【0004】
一方で、内燃機関の排出ガスセンサにおいて、内燃機関から排出される排出ガス中の空燃比を検出する際には、センサ素子温度が活性温度である必要があり、ヒータを付設しセンサ素子を加熱することで活性温度にすることが一般的である。ここで、内燃機関の自動停止中にヒータへの電源供給を遮断した場合、内燃機関の自動停止中にセンサ素子温度が活性温度以下まで低下し、内燃機関の自動停止が終了し自動始動した後、センサ素子温度を活性温度まで昇温し、空燃比を検出し空燃比フィードバックを実施するまでの時間が長くなり、排出ガスが悪化する問題がある。
【0005】
かかる問題に対して、例えば、特開平09−88688公報によると、内燃機関の自動停止中にセンサ素子温度を活性温度に維持することで、内燃機関の自動始動直後から空燃比を検出し空燃比フィードバックを開始することで、排出ガス悪化を防止する方法が開示されている。
【0006】
また、例えば、特開2003−148206公報によると、内燃機関の自動停止中にセンサ素子温度を活性温度より低い温度に設定された所定の余熱温度付近に維持することで、内燃機関の自動停止中におけるヒータ消費電力を抑制しつつ、内燃機関の自動始動後にセンサ素子温度を活性温度まで昇温させる時間を短くし、早期に空燃比フィードバックを開始することで排出ガス悪化も抑制する方法が開示されている。
【0007】
また、例えば、特開2009−156108公報によると、内燃機関の自動始動後の空燃比検出非要求期間が長いほど、内燃機関の自動停止中に維持する余熱温度を低温側に設定することで、内燃機関の自動停止中におけるヒータへの通電量の抑制と、内燃機関の自動始動後における空燃比の検出要求に対する応答性の確保を両立させている。
【0008】
また、例えば、特開2010−185345公報によると、内燃機関の自動停止時間を予測し、予測した自動停止時間に基づき「内燃機関の自動停止中にセンサ素子温度を所定温度(例えば、活性温度)に維持した場合のヒータの消費電力量」と、「内燃機関の自動停止中にヒータへの電力供給を停止し、内燃機関の自動始動後に再びヒータへの電力供給を開始しセンサ素子温度を所定温度にした場合のヒータの消費電力量」の少なくなる方を、内燃機関の自動停止中のヒータ制御として選択することで、より消費電力量が少なくなるヒータ制御方法を開示している。
【0009】
ところで、内燃機関の排出ガスセンサのセンサ素子温度を活性温度に維持するために、排出ガスセンサのセンサ素子の実温度と排出ガスセンサのセンサ素子のインピーダンスの関係に着目し、センサ素子のインピーダンスからセンサ素子の実温度を推定し、推定したセンサ素子の実温度が所望の活性温度になるようヒータへの印加実効電圧を調整する方法がある。しかしながら、経時変化に伴い、センサ素子が排気にさらされることや、センサ素子への付着物などにより劣化し、センサ素子の実温度とインピーダンスの関係が、例えば、図30(a)のインピーダンス劣化品3004のように、インピーダンス初期中央品3002から変化し、センサ素子のインピーダンスによるセンサ素子の実温度の推定にずれが生じることで、所望の活性温度を維持できず、センサ素子の実温度が所望の活性温度より高くなり、消費電力量の増大という問題や、センサ素子やヒータへの過加熱という問題が生じる。
また、センサ素子特性のばらつきによっても、センサ素子の実温度とインピーダンスの関係が、例えば、図30(a)のインピーダンス初期下限品3001のように、インピーダンス初期中央品3002と異なるため、センサ素子のインピーダンスによるセンサ素子の実温度の推定にずれが生じ、所望の活性温度を維持できず、センサ素子の実温度が所望の活性温度より低くなり、空燃比制御の実行不可、または、空燃比制御の精度が悪化し、結果、排出ガスが悪化するという問題が生じる。
【0010】
かかる問題に対して、例えば、特開2000−65784公報によると、所定運転状態(内燃機関の冷間定常アイドル状態、完全暖機定常アイドル状態、及び、完全暖機定常走行状態の内の少なくとも一つの運転状態)において、所定期間中にヒータへ供給された電力の積算電力量を、経時変化に伴うセンサ素子の劣化のパラメータとし、センサ素子のインピーダンスを補正することで、センサ素子温度を制御目標値へ適切に制御でき、センサ素子やヒータへの過加熱を防止することが開示されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2001−295678号公報
【特許文献2】特開平09−88688号公報
【特許文献3】特開2003−148206号公報
【特許文献4】特開2009−156108号公報
【特許文献5】特開2010−185345号公報
【特許文献6】特開2000−65784号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、上記特許文献1に示される従来技術を、自動停止/自動始動装置を備えた内燃機関の排出ガスセンサのヒータに適用した場合、内燃機関の自動停止中にヒータへの電源供給を遮断することで、ヒータの消費電力量を低減できるものの、内燃機関の自動停止中にセンサ素子温度が活性温度以下まで低下し、内燃機関の自動停止が終了し自動始動した後、センサ素子温度を活性温度まで昇温し、空燃比を検出し空燃比フィードバック制御を実施するまでの時間が長くなり、排出ガスが悪化する問題がある。
【0013】
また、上記特許文献2に示される従来技術では、内燃機関の自動停止中にセンサ素子温度を活性温度に維持することで、内燃機関の自動始動直後から空燃比を検出し空燃比フィードバック制御を開始でき、排出ガス悪化を防止できるが、内燃機関の自動停止中におけるヒータの消費電力量を低減できない問題がある。
【0014】
また、上記特許文献3に示される従来技術では、内燃機関の自動停止中にセンサ素子温度を活性温度より低い温度に設定された所定の余熱温度付近に維持することで、内燃機関の自動停止中におけるヒータ消費電力を抑制しつつ、内燃機関の自動始動後にセンサ素子温度を活性温度まで昇温させる時間を短くし、早期に空燃比フィードバック制御を開始することで排出ガス悪化も抑制できるが、次のような問題がある。
即ち、内燃機関の自動停止開始後、センサ素子温度は、ヒータへ電源供給せずとも、活性温度から所定の余熱温度に低下するため、この間のヒータへの電源供給を停止することで、自動停止中におけるヒータの消費電力量を更に低減できる点が考慮されていない。
【0015】
また、上記特許文献5に示される従来技術では、内燃機関の自動停止時間を予測し、予測した自動停止時間に基づき「内燃機関の自動停止中にセンサ素子温度を所定温度(例えば、活性温度)に維持した場合のヒータの消費電力量」と、「内燃機関の自動停止中にヒータへの電力供給を停止し、内燃機関の自動始動後に再びヒータへの電力供給を開始しセンサ素子温度を所定温度にした場合のヒータの消費電力量」の少なくなる方を、内燃機関の自動停止中のヒータ制御として選択することで、より消費電力量を少なくしているが、次のような問題点がある。
即ち、内燃機関の自動停止中、運転者の車両発進意図があったときに自動始動するような自動停止/自動始動装置を備えた内燃機関においては、いつ、自動停止が解除され自動始動されるかが予め分からないが、上記特許文献5に示される技術によると、内燃機関の自動停止時間を道路の混雑状況に関する情報に基づき予測しているため、例えば、道路の混雑状況に関する情報提供のない地域、信号停止時における自動停止/自動始動、運転者の心変わりによる自動始動、などの状況では予測することができず、消費電力量を少なくする効果を得ることができない。
ここで、運転者の車両発進意図とは、例えば、アクセルペダルやクラッチペダルの踏み込み、ブレーキペダルの解除、など、である。
【0016】
また、上記特許文献1〜5に示される従来技術では、内燃機関の自動停止/自動始動が連続するような場合、即ち、内燃機関の自動始動後、排出ガスセンサが活性状態となる前に再び内燃機関の自動停止が開始されるような場合に、センサ素子温度が内燃機関の自動停止中における所定のセンサ素子目標温度以下に低下し、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達が遅延し、空燃比フィードバック制御の開始タイミングが遅れることにより燃費や排出ガスが悪化する点が考慮されていない。
【0017】
また、上記特許文献1〜5に示される従来技術では、センサ周辺温度の影響が考慮されていない。即ち、内燃機関の自動停止中にセンサ周辺温度が低下するため、センサ素子温度を内燃機関の自動停止中における所定のセンサ素子目標温度に維持するための印加実効電圧が、センサ周辺温度に応じて異なる点が考慮されていない。
また、内燃機関の自動始動時のセンサ周辺温度の違いにより、自動始動後のセンサ素子温度の昇温速度が変わり、特に、センサ周辺温度が低い場合、センサ素子温度の昇温が遅くなり、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達が遅延し、空燃比フィードバック制御の開始タイミングが遅れることにより燃費や排出ガスが悪化する点が考慮されていない。
【0018】
また、上記特許文献1〜5に示される従来技術では、排出ガスセンサのセンサ素子温度をセンサ素子インピーダンスから推定し、目標のセンサ素子インピーダンスになるようにヒータを制御するような排出ガスセンサのヒータ制御装置において、センサ素子温度とセンサ素子インピーダンスの関係が、センサ素子特性のばらつきや、劣化による特性変化により変化することが考慮されていない。
即ち、センサ素子インピーダンスから推定する推定センサ素子温度と、実際のセンサ素子温度は異なる場合があり、ヒータにより所定の目標センサ素子インピーダンスに制御していても、実際のセンサ素子温度とは異なり、実際のセンサ素子温度が推定センサ素子温度より高い場合は、内燃機関の自動停止中におけるヒータ消費電力が増大する問題があり
、実際のセンサ素子温度が推定センサ素子温度より低い場合は、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度が活性温度に到達するのが遅れ、結果、空燃比フィードバック制御の開始が遅れることで、燃費や排出ガスが悪化する問題がある。
【0019】
また、上記特許文献6に示される従来技術では、内燃機関の冷間定常アイドル状態、完全暖機定常アイドル状態、完全暖機定常走行状態といった、内燃機関の運転中にヒータへ供給された電力の積算電力量に基づき、センサ素子インピーダンスを補正しているため、排出ガスセンサのセンサ素子の周辺雰囲気に影響する因子として、内燃機関の回転速度や負荷、水温や吸気温、排気温といった各温度、車速など、多くの因子があり、各それぞれのばらつきの影響により、精度よくセンサ素子インピーダンスを補正することが困難という問題がある。
また、センサ素子特性のばらつき、特に、実際のセンサ素子温度が推定センサ素子温度より低い場合の、内燃機関の自動始動後における空燃比の検出要求に対し、センサ素子温度が活性温度に到達するのが遅れ、その結果、空燃比フィードバック制御の開始が遅れることで、燃費や排出ガスが悪化する問題が考慮されていない。
【0020】
この発明は、上記のような従来の問題点を解消するためになされたもので、内燃機関の自動停止中、及び、自動始動後におけるヒータの消費電力量を低減でき、また、自動始動後における空燃比フィードバック制御の開始遅延を防止し燃費や排出ガスの悪化を防止できる排出ガスセンサのヒータ制御装置を備えた内燃機関の制御装置を得ることを目的とする。
【課題を解決するための手段】
【0021】
この発明に係わる内燃機関の制御装置は、内燃機関の停止条件が成立したときに前記内燃機関を自動停止し、前記内燃機関の始動条件が成立したときに前記内燃機関を自動始動する前記内燃機関の自動停止/自動始動装置と、前記内燃機関の排気通路に設けられ、排出ガス中の空燃比、又は、排出ガスの理論空燃比からのリッチ/リーンの傾向、の少なくとも一方を検出する排出ガスセンサと、前記排出ガスセンサを加熱するヒータと、前記ヒータへの印加実効電圧を目標ヒータ印加実効電圧となるように制御するヒータ制御装置を備え、前記ヒータ制御装置は、前記目標ヒータ印加実効電圧を、前記排出ガスセンサのセンサ素子温度が前記内燃機関の運転中のセンサ素子目標温度となるような第1の目標印加実効電圧に設定する第一制御期間と、前記内燃機関の自動停止開始後、前記目標ヒータ印加実効電圧を、前記第1の目標印加実効電圧より低い第2の目標印加実効電圧に設定する第二制御期間と、前記第二制御期間中に、前記第二制御期間の終了を判定する第二制御期間終了判定手段と、前記第二制御期間終了判定手段により、前記第二制御期間の終了判定後、前記目標ヒータ印加実効電圧を、前記第2の目標印加実効電圧より高く、前記排出ガスセンサのセンサ素子温度が前記内燃機関の自動停止中のセンサ素子目標温度となるような第3の目標印加実効電圧に制御する第三制御期間とを備えるように構成したものである。
【発明の効果】
【0022】
この発明の内燃機関の制御装置によれば、内燃機関の自動停止開始後、センサ素子温度が活性温度から所定の余熱温度に低下するまでヒータへ電源供給せず、所定の余熱温度に低下した後、内燃機関の自動停止終了まで所定の余熱温度を保持することで、内燃機関の自動停止中におけるヒータの消費電力量を低減でき、また、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達遅延を防止し、空燃比フィードバック制御の開始が遅れず排出ガスの悪化を防止できる排出ガスセンサのヒータ制御装置を備えた内燃機関の制御装置を得ることができる。
【0023】
上述した、またその他の、この発明の目的、特徴、効果は、以下の実施の形態における詳細な説明および図面の記載からより明らかとなるであろう。
【図面の簡単な説明】
【0024】
【図1】この発明における排出ガスセンサのヒータ制御装置を搭載した内燃機関の概略構成を示した図である。
【図2】図1に示す排出ガスセンサの内部構造を等価的に示した回路図である。
【図3】この発明の実施の形態1における、内燃機関の自動停止中、及び、自動停止後におけるヒータ制御を示すタイミングチャートである。
【図4】この発明の実施の形態1における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図5】この発明の実施の形態1における、ヒータ消費電力量の低減効果を従来技術と比較しながら説明するタイミングチャートである。
【図6】この発明の実施の形態2における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図7】この発明の実施の形態2の補正を実施しなかった場合の課題を説明するタイミングチャートである。
【図8】この発明の実施の形態2における、内燃機関の自動停止/自動始動が所定期間内に連続するときに、第二制御期間終了時間を短く補正することによる効果を説明するタイミングチャートである。
【図9】この発明の実施の形態2における、内燃機関の自動停止/自動始動が所定期間内に連続するときに、第3の目標印加実効電圧を高く補正することによる効果を説明するタイミングチャートである。
【図10】この発明の実施の形態3における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図11】この発明の実施の形態3の補正を実施しなかった場合の課題を説明するタイミングチャートである。
【図12】この発明の実施の形態3における、センサ周辺温度が低いほど高く、高いほど低く補正することによる効果を説明するタイミングチャートである。
【図13】この発明の実施の形態4における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図14】この発明の実施の形態4の補正を実施しなかった場合の課題と、第3の目標印加実効電圧を自動停止開始からの経過時間が長いほど高く補正することによる効果を説明するタイミングチャートである。
【図15】この発明の実施の形態5における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図16】この発明の実施の形態5の補正を実施しなかった場合の課題を説明するタイミングチャートである。
【図17】この発明の実施の形態5における、第4の目標印加実効電圧、又は、第4の目標印加実効電圧を印加する印加期間を補正することによる効果を説明するタイミングチャートである。
【図18】この発明の実施の形態6における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図19】この発明の実施の形態6における、センサ周辺温度に応じて第四制御期間にヒータに印加する印加期間を補正することによる効果を説明するタイミングチャートである。
【図20】この発明の実施の形態6における、センサ周辺温度に応じて第四制御期間にヒータに印加する印加実効電圧を補正することによる効果を説明するタイミングチャートである。
【図21】この発明の実施の形態7における、内燃機関の自動停止中、及び、自動停止後におけるヒータ制御を示すタイミングチャートである。
【図22】この発明の実施の形態7における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図23】この発明の実施の形態8における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図24】この発明の実施の形態9における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図25】この発明の実施の形態9の補正を実施しなかった場合の課題を説明するタイミングチャートである。
【図26】この発明の実施の形態9における、センサ周辺温度が低いほど低く、高いほど高く補正することによる効果を説明するタイミングチャートである。
【図27】この発明の実施の形態10における、目標ヒータ印加実効電圧の設定方法を示したフローチャートである。
【図28】この発明の実施の形態10の補正を実施しなかった場合の課題と、第3の目標インピーダンスを自動停止開始からの経過時間が長いほど低く補正することによる効果を説明するタイミングチャートである。
【図29】この発明の実施の形態11における、内燃機関の自動停止中におけるヒータ制御を示すタイミングチャートである。
【図30】センサ素子温度、センサ素子インピーダンス、及び、内燃機関の自動停止後ヒータへの印加実効電圧を0V(ヒータ停止)としてからの経過時間、の関係を説明する図である。
【図31】この発明の実施の形態11における第3の目標インピーダンスをヒータ停止期間が短いほど高く、ヒータ停止期間が長いほど低く補正する理由を説明する図である。
【図32】この発明の実施の形態11における第3の目標インピーダンスの補正方法を示したフローチャートである。
【図33】この発明の実施の形態11における内燃機関の自動停止中のヒータ消費電力低減効果を説明するタイミングチャートである。
【図34】この発明の実施の形態11における内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達遅延の防止を説明するタイミングチャートである。
【図35】この発明の実施の形態12における第3の目標インピーダンスの補正方法を示したフローチャートである。
【図36】この発明の実施の形態13における第3の目標インピーダンスの補正方法を示したフローチャートである。
【図37】この発明の実施の形態14における排出ガスセンサのヒータ制御方法を示したフローチャートである。
【図38】この発明の実施の形態15における排出ガスセンサの故障検出方法を示したフローチャートである。
【発明を実施するための形態】
【0025】
以下、この発明の実施の形態について、図面を参照して詳細に説明する。なお、各図中、同一符号は、同一あるいは相当部分を示すものとする。
【0026】
実施の形態1.
図1は、この発明の実施の形態1に係る排出ガスセンサのヒータ制御装置112を搭載した内燃機関の概略構成を示すものである。
図1において、内燃機関101には、吸気通路102と排気通路103が連通され、排気通路103には、排出ガス中の有害物質を除去するための触媒104が設けられている。触媒104の上流側には、第一の排出ガスセンサとして、排出ガスセンサ105が設けられている。排出ガスセンサ105は、触媒104の上流側における排出ガスの酸素濃度を検出し、第一の空燃比に対応した検出信号AF1を出力する。また、触媒104の下流側には、第二の排出ガスセンサとして、排出ガスセンサ106が設けられている。排出ガスセンサ106は、触媒104の下流側における排出ガスの酸素濃度を検出し、第二の空燃比に対応した検出信号AF2を出力する。
【0027】
また、内燃機関101には、内燃機関101の運転状態を検出する各種センサ108が設けられており、各種センサ108の検出信号は内燃機関の制御装置(以下、単に制御装置ともいう。)107に入力されている。
【0028】
制御装置107は、マイクロプロセッサ、ROM、RAM、I/Oインターフェースなどにより構成され、制御装置107の空燃比制御装置110は、第1及び第2の空燃比に対応する各検出信号AF1、AF2と、各種センサ108からの検出信号に基づいて、空燃比フィードバック制御を行い、吸気通路102に設けられたインジェクタ109に対する駆動制御信号を生成する。なお、インジェクタ109は、内燃機関101の各気筒の筒内に直接燃料噴射するように取り付けられたものでもよい。
【0029】
また、制御装置107の自動停止/自動始動装置111は、車両の停止アイドリング中など内燃機関101の停止条件が成立したときに内燃機関101を自動停止し、運転者の車両発進意図があったときなど内燃機関101の始動条件が成立したときに内燃機関101を自動始動するようになっている。
【0030】
なお、空燃比制御装置110や自動停止/自動始動装置111、排出ガスセンサのヒータ制御装置112、といった制御装置107の各装置は、1つの制御装置で実行するよう構成しているが、複数の制御装置で実行しても同じであることは言うまでもない。
【0031】
ここで、空燃比制御装置110についてさらに詳しく説明する。
触媒104は、内燃機関101の排出ガス中のHC、CO、NOxを同時に浄化する三元触媒で、理論空燃比の付近において高い浄化性能を発揮するため、触媒104の上流の排出ガスセンサ105の検出信号AF1が理論空燃比となるようインジェクタ109の燃料噴射量をフィードバック制御する。但し、各気筒毎に取り付けられたインジェクタ109の気筒間のバラツキや、各気筒から排出ガスセンサ105までの排気通路の長さの違いにより、排出ガスセンサ105の検出信号AF1が理論空燃比に制御されているときでも触媒104内が理論空燃比となっていない場合があり、また、排出ガスセンサ105が高い排気温度にさらされることなどにより、検出信号AF1の出力変動が発生する場合もあり
、これらを補正するために、空燃比制御装置110は、触媒104の下流の排出ガスセンサ106の検出信号AF2を用いて理論空燃比との誤差を補正し、触媒下流の空燃比を理論空燃比に保っている。(以下、「空燃比フィードバック制御」と称す。)
【0032】
図2は、図1に示す排出ガスセンサ105、106の内部構造を等価的に示した回路図である。図2に示すように、排出ガスセンサ105、106は、センサ素子201を備えている。また、排出ガスセンサ105、106には、ヒータ202が付設されている。
【0033】
制御装置107の排出ガスセンサのヒータ制御装置112は、排出ガスセンサ105、106のセンサ素子温度が、運転状態に応じた所定の温度になるようヒータ202への印加実効電圧を調整する。例えば、内燃機関101の運転時は、排出ガスセンサ105、106が活性状態となるセンサ素子温度になるようヒータ202への印加実効電圧が調整され、内燃機関101の自動停止中は、所定の保温温度になるようヒータ202への印加実効電圧が調整される。内燃機関101の自動停止中については以下で詳しく説明する。
なお、ヒータ202への印加実効電圧を調整する代わりに、ヒータ202への通電時間を調整しても同じことである。
【0034】
ここで図3のタイムチャートを参照しながら、この発明の実施の形態1に係る内燃機関の制御装置における排出ガスセンサのヒータ制御装置112について説明する。
図3(A)は、制御装置107の自動停止/自動始動装置111による内燃機関101の自動停止の期間、及び、自動停止/自動始動のタイミングを示し、図3(B)は、制御装置107の空燃比制御装置110による空燃比フィードバック制御の開始/終了タイミングを示す。
図3(C)は、内燃機関101の自動停止開始からの経過時間を示し、自動停止/自動始動装置111による内燃機関101の自動始動時にリセットされる。
また、図3(D)は、内燃機関101の自動始動開始からの経過時間を示し、自動停止/自動始動装置111による内燃機関101の自動停止時にリセットされる。
なお、自動停止開始からの経過時間、及び、自動始動開始からの経過時間は、例えば、制御装置107内で演算される。
【0035】
内燃機関101の運転中である第一制御期間301では、図3(E)、図3(F)に示すように、目標ヒータ印加実効電圧を、排出ガスセンサ105、106のセンサ素子温度が内燃機関101の運転中のセンサ素子目標温度308となるような第1の目標印加実効電圧305に設定する。
【0036】
次に、内燃機関101の自動停止開始後である第二制御期間302では、図3(C)、図3(E)に示すように、目標ヒータ印加実効電圧を、自動停止開始からの経過時間が第二制御期間終了時間T1に到達するまで、第1の目標印加実効電圧305より低い第2の目標印加実効電圧306に設定する。
【0037】
次に、内燃機関101の自動停止中である第三制御期間303では、自動停止開始からの経過時間が第二制御期間終了時間T1に到達後、図3(E)、図3(F)に示すように
、目標ヒータ印加実行電圧を、第2の目標印加実効電圧306より高く、排出ガスセンサ105、106のセンサ素子温度が内燃機関101の自動停止中のセンサ素子目標温度310となるような第3の目標印加実効電圧307に設定する。
【0038】
次に、内燃機関101の自動始動開始後である第四制御期間304では、図3(C)、図3(E)に示すように、目標ヒータ印加実効電圧を、自動始動開始からの経過時間が第四制御期間終了時間T2に到達するまで、第1の目標印加実効電圧305以上である第4の目標印加実効電圧に設定する。
【0039】
次に、内燃機関101の自動始動後、第四制御期間終了時間T2経過後、目標ヒータ印加実効電圧を、排出ガスセンサ105、106のセンサ素子温度が内燃機関101の運転中のセンサ素子目標温度308となるような第1の目標印加実効電圧305に設定する第一制御期間301となる。
内燃機関101の運転中のセンサ素子目標温度308は、例えば、排出ガスセンサ105、106の活性下限温度309以上の活性温度である。
【0040】
ここで、内燃機関101の自動停止中のセンサ素子目標温度310は、例えば、内燃機関101の自動始動後、空燃比フィードバック制御のための空燃比検出要求開始までに、第四制御期間における第4の目標印加実効電圧の印加により、排出ガスセンサのセンサ素子温度を内燃機関101の運転中のセンサ素子目標温度308に到達させ、かつ、第二制御期間302、第三制御期間303、第四制御期間304におけるヒータの消費電力量の合計311が最小となるように、予め適合試験などによって設定される。
なお、第三制御期間303における内燃機関101の自動停止中のセンサ素子目標温度310を低く設定するほど、第四制御期間304に昇温しなければならない温度幅が大きくなり、内燃機関101の運転中のセンサ素子目標温度308に到達するまでの時間が長くなると共に、第四制御期間304における消費電力量が大きくなるが、第三制御期間における消費電力量が小さくなる。
一方、第三制御期間303における内燃機関101の自動停止中のセンサ素子目標温度310を高く設定するほど、第四制御期間304に昇温しなければならない温度幅が小さくなり、内燃機関101の運転中のセンサ素子目標温度308に到達するまでの時間が短くなると共に、第四制御期間304における消費電力量が小さくなるが、第三制御期間における消費電力量が大きくなる。
【0041】
ここで、第二制御期間終了時間T1は、例えば、内燃機関101の自動停止開始時の排出ガスセンサのセンサ周辺温度が所定温度であるなど、ある所定の環境下で、内燃機関101の自動停止開始後、第二制御期間302にて、排出ガスセンサのセンサ素子温度が低下し、第三制御期間303における内燃機関101の自動停止中のセンサ素子目標温度310に到達するまでの時間が、予め適合試験などによって設定される。
【0042】
また、第四制御期間終了時間T2は、例えば、内燃機関101の自動始動開始時の排出ガスセンサのセンサ周辺温度が所定温度であるなど、ある所定の環境下で、内燃機関101の自動始動開始後、第四制御期間304にて、ヒータ202に第4の目標印加実効電圧を印加することで排出ガスセンサのセンサ素子温度が上昇し、第一制御期間301における内燃機関101の運転中のセンサ素子目標温度308に到達するまでの時間が、予め適合試験などによって設定される。
【0043】
ここで、第1の目標印加実効電圧305は、例えば、第一制御期間301における内燃機関101の運転中のセンサ素子目標温度308になるよう、エンジン回転速度とエンジン負荷からなる運転領域毎に予め適合試験などによって設定される。
【0044】
ここで、第2の目標印加実効電圧306は、第二制御期間302の消費電力量低減のため、十分に小さい値、例えば、0V(ヒータ停止)が設定される。
【0045】
ここで、第3の目標印加実効電圧307は、例えば、第三制御期間303における内燃機関101の自動停止中のセンサ素子目標温度310となるよう、予め適合試験などによって設定される。
【0046】
ここで、第4の目標印加実効電圧は、図3(E)に示すように、例えば、ヒータ202
の許容最大印加実効電圧(例えば、14V)が設定され、排出ガスセンサのセンサ素子温度が、速やかに、内燃機関101の自動停止中のセンサ素子目標温度310から内燃機関101の運転中のセンサ素子目標温度308に到達できる。
なお、電源としてのバッテリを内燃機関の始動装置と共有するようなシステムにおいては、始動中のバッテリ電圧の低下などの制約を受けるため、その瞬間のバッテリ電圧値が最大印加実効電圧となる。
【0047】
なお、内燃機関101の自動始動開始後、第四制御期間終了時間T2が経過し、第四制御期間から第一制御期間へ移行する際、即ち、目標ヒータ印加実効電圧を、第4の目標印加実効電圧から第1の目標印加実効電圧へ切り替える際、図3(E)に示すように、徐々に、第4の目標印加実効電圧から第1の目標印加実効電圧へ変化させるような、いわゆる漸減処理を実施することで、空燃比フィードバック開始前後の排出ガスセンサのセンサ素子温度の急変を防止し、内燃機関101の運転中のセンサ素子目標温度308に安定させるようにしてもよい。
【0048】
次に、図4のフローチャートを用いて、本発明における排出ガスセンサのヒータ制御方法、即ち、内燃機関101の自動停止中、及び、自動始動後における目標ヒータ印加実効電圧の設定方法に関して、制御装置107での処理を説明する。
【0049】
図4で示されるフローチャートのスタートからエンドは制御装置107の演算処理周期毎に毎回演算され、まず、ステップS401において、キーオン等により制御装置107の初期化条件が成立したとき、ステップS402で、キーオンからキーオフまでの間の内燃機関101の自動停止/自動始動回数C_IS、自動停止開始からの経過時間T_IS_ON、及び、自動始動開始からの経過時間T_IS_OF、に0を格納し、初期化を行う。
【0050】
次にステップS403で、被水による素子割れ条件が成立した場合、ステップS404で、目標ヒータ印加実効電圧V_Tに、被水時の目標印加実効電圧V_TWを格納する。
ここで、被水による素子割れ条件とは、内燃機関101の冷間始動時や冷間運転時、もしくは、内燃機関101の自動停止中に機関やセンサ素子の温度が低下した後に自動始動する場合など、機関やセンサ素子の温度が凝縮点以下に低下している状態を指す条件で、例えば、水温や内燃機関の始動後経過時間などにより設定されている。
即ち、例えば、内燃機関101の冷間始動時、排出ガス中に含まれる水蒸気が、温まっていない排気管(凝縮点以下)と触れることで凝縮され凝縮水となり、この凝縮水が飛散し
、排出ガスセンサのセンサ素子が被水する可能性がある。このとき、排出ガスセンサのセンサ素子は、早期に活性状態にするため、ヒータにより急激に加熱されているため、被水した部分と被水していない部分とでの熱膨張の違いなどにより素子割れが起きる恐れがある。このため、一般的に、内燃機関101の冷間始動時や冷間運転時、もしくは、内燃機関101の自動停止中に機関やセンサ素子の温度が低下した後に自動始動する場合、などに、ヒータによる加熱を制限しており、この条件を設定したものである。
また、被水時の目標印加実効電圧V_TWとして、被水しても素子割れを起こさない目標印加実効電圧が設定される。又は、内燃機関101が完全暖機となり凝縮水の発生がなくなるまで、0V(即ち、ヒータ停止)を設定してもよい。
【0051】
ステップS403で、被水による素子割れ条件が不成立の場合、ステップS405で、内燃機関101の自動停止開始時であるかを判定する。ステップS405で自動停止開始時と判定された場合、ステップS406で、自動停止/自動始動回数C_ISの前回値に1を加算し、自動停止/自動始動回数C_ISに格納し、また、ステップS407で、自動始動開始からの経過時間T_IS_OFに0を格納することでT_IS_OFをリセットし、ステップS408へ進む。一方、ステップS405で自動停止開始時と判定されなかった場合、ステップS408へ進む。
ここで、自動停止開始時とは、図3において、第一制御期間301から第二制御期間302に移行したタイミングである。
【0052】
次に、ステップS408で、自動停止/自動始動回数C_ISが1未満の場合、即ち、キーオン後、一度も内燃機関101の自動停止が行われていない場合、ステップS409で、目標ヒータ印加実効電圧V_Tに、第1の目標印加実効電圧V_T1を格納する。
一方、ステップS408で、自動停止/自動始動回数C_ISが1以上の場合、即ち、キーオン後、1回以上、内燃機関101の自動停止が行われた場合、ステップS410へ進む。
【0053】
次に、ステップS410で、内燃機関101の自動停止中と判定されたとき、ステップS411で、自動停止開始からの経過時間T_IS_ONの前回値に演算処理周期を加算し、経過時間T_IS_ONに格納の上、ステップS412に進む。
【0054】
次に、ステップS412で、自動停止開始からの経過時間T_IS_ONが、上記段落[0041]で説明した第二制御期間終了時間T1未満のとき、ステップS413で、目標ヒータ印加実効電圧V_Tに、第2の目標印加実効電圧V_T2を格納する。
一方、ステップS412で、自動停止開始からの経過時間T_IS_ONが第二制御期間終了時間T1以上のとき、ステップS414で、目標ヒータ印加実効電圧V_Tに、第3の目標印加実効電圧V_T3を格納する。
【0055】
ステップS410で、内燃機関101の自動停止中と判定されなかったとき、ステップS415に進み、ステップS415で内燃機関の自動始動開始時と判定された場合、ステップS416で、自動停止開始からの経過時間T_IS_ONに0を格納することでT_IS_ONをリセットし、ステップS417へ進む。
一方、ステップS415で自動始動開始時と判定されなかった場合、ステップS417へ進む。ステップS417で、自動始動開始からの経過時間T_IS_OFの前回値に演算処理周期を加算し、経過時間T_IS_OFに格納の上、ステップS418に進む。
ここで、自動始動開始時とは、図3において、第三制御期間303から第四制御期間304に移行したタイミングである。
【0056】
次に、ステップS418で、自動始動開始からの経過時間T_IS_OFが、上記段落
[0042]で説明した第四制御期間終了時間T2未満のとき、ステップS419で、ヒータ202への目標ヒータ印加実効電圧V_Tに、第4の目標印加実効電圧V_T4を格納する。一方、ステップS418で、自動始動開始からの経過時間T_IS_OFが第四制御期間終了時間T2以上のとき、ステップS420で、目標ヒータ印加実効電圧V_Tに、第1の目標印加実効電圧V_T1を格納する。
【0057】
次に、ステップS421で、ヒータ202への印加実行電圧を、目標ヒータ印加実効電圧V_Tとなるように制御して、図4における処理を終了する。
【0058】
さて、ここで、図5を用いて、実施の形態1による内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量の低減効果について、従来技術と比較しながら説明する。
【0059】
まず、例えば、特許文献2に示される従来技術は、図5(F)の506のように、内燃機関の自動停止中も排出ガスセンサのセンサ素子温度を内燃機関の運転中のセンサ素子目標温度308に維持するようにしたものである(従来技術1とする)。
ここで、従来技術1における内燃機関の自動停止中から自動始動後にかけてのヒータ消費
電力量は、図5(G)より、下式(1)となる。
【0060】
消費電力量A+消費電力量B+消費電力量C+消費電力量D・・・式(1)
【0061】
これより、内燃機関の自動停止中の消費電力量(消費電力量B+消費電力量C+消費電力量D)は低減しないが、内燃機関の自動始動後の排出ガスセンサのセンサ素子温度の昇温のためのヒータ消費電力量の増加もないことが分かる。また、排出ガスセンサのセンサ素子温度を内燃機関の運転中のセンサ素子目標温度308に常に維持しているため、内燃機関の自動始動後、排出ガスセンサは直ちに空燃比を検出でき、排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308になるまで空燃比フィードバック制御開始を遅らせることがない。
【0062】
また、例えば、特許文献3や特許文献4に示される従来技術は、図5(E)の503のように、内燃機関の自動停止中に、排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308より低い、内燃機関の自動停止中のセンサ素子目標温度310を維持するための目標印加実効電圧を、常時印加するようにしたものである(従来技術2とする)。ここで、従来技術2における内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量は、図5(G)より、下式(2)となる。
【0063】
消費電力量A+消費電力量C+消費電力量D+消費電力量E・・・式(2)
【0064】
これより、消費電力量B>消費電力量Eであることより、従来技術1に比べ、内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量が低減していることが分かる。また、内燃機関の自動停止中に、排出ガスセンサのセンサ素子温度を、内燃機関の自動停止中のセンサ素子目標温度310に維持しているため、内燃機関の自動始動後に排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達するタイミングが、内燃機関の自動始動後の空燃比フィードバック制御開始タイミングに対し、遅れない。
【0065】
また、例えば、特許文献1に示される従来技術は、図5(E)の504のように、内燃機関の自動停止中に排出ガスセンサのヒータへの印加実効電圧を常時、0Vとしたものである(従来技術3とする)。ここで、従来技術3における内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量は、図5(G)より、下式(3)となる。
【0066】
消費電力量A+消費電力量E+消費電力量F・・・式(3)
【0067】
これより、従来技術3は、従来技術1や従来技術2と比べ、消費電力量を低減できることが分かる。しかし、図5(F)に示すように、排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308へ到達するタイミングが、従来技術2に比べ遅れ、自動停止時間が長い場合、センサ素子温度508が更に低下することで排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308へ到達するタイミングも遅れ、空燃比フィードバック制御開始までに排出ガスセンサが活性状態にならないことがある。
【0068】
これら従来技術1〜従来技術3が、内燃機関の自動停止中に、センサ素子温度をある一定の目標センサ素子温度に維持、又は、目標ヒータ印加実効電圧をある一定の目標印加実効電圧に維持しているのに対し、この発明の実施の形態1による方法では、内燃機関の自動停止中の目標ヒータ印加実効電圧を図5(E)の501のように第二制御期間終了時間T1経過後に変更するようにしている。即ち、内燃機関の自動停止中のヒータへの目標印加実効電圧を2段階に設定できるようにしている。
【0069】
ここで、実施の形態1における内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量は、図5(G)より、下式(4)となる。
【0070】
消費電力量A+消費電力量D+消費電力量E・・・式(4)
【0071】
これより、従来技術1に対しては、消費電力量B+消費電力量C>消費電力量Eの関係から、式(1)から式(4)を減算した量、即ち、消費電力量B+消費電力量C−消費電力量Eだけ、内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量を、実施の形態1により、低減できる。
また、従来技術2に対しては、式(2)から式(4)を減算した量、即ち、消費電力量Cだけ、内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量を、実施の形態1により、低減できる。
【0072】
また、従来技術3に対しては、消費電力量D>消費電力量Fの関係から、式(4)から式(3)を減算した量、即ち、消費電力量D−消費電力量Fだけ、内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量が、実施の形態1により、増加する。
しかし、従来技術3は上記段落[0065]〜[0067]で説明したように、自動停止開始からの経過時間が長い場合、センサ素子温度508が更に低下することで排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308へ到達するタイミングが遅れ、空燃比フィードバック制御開始までに排出ガスセンサが活性状態にならない問題があるのに対し、実施の形態1では、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にすることができる。
【0073】
以上のように、この発明の実施の形態1の内燃機関の制御装置は、内燃機関の停止条件が成立したときに内燃機関を自動停止し、内燃機関の始動条件が成立したときに内燃機関を自動始動する内燃機関の自動停止/自動始動装置と、内燃機関の排気通路に設けられ、排出ガス中の空燃比、又は、排出ガスの理論空燃比からのリッチ/リーンの傾向、の少なくとも一方、を検出する排出ガスセンサと、排出ガスセンサを加熱するヒータと、ヒータへの印加実効電圧を目標ヒータ印加実効電圧となるように制御するヒータ制御装置を備え
、ヒータ制御装置は、目標ヒータ印加実効電圧を、排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度となるような第1の目標印加実効電圧に設定する第一制御期間と、内燃機関の自動停止開始後、目標ヒータ印加実効電圧を、第1の目標印加実効電圧より低い第2の目標印加実効電圧に設定する第二制御期間と、第二制御期間中に、第二制御期間の終了を判定する第二制御期間終了判定手段と、第二制御期間終了判定手段により、第二制御期間の終了判定後、目標ヒータ印加実効電圧を、第2の目標印加実効電圧より高く、排出ガスセンサのセンサ素子温度が内燃機関の自動停止中のセンサ素子目標温度となるような第3の目標印加実効電圧に制御する第三制御期間備えるように構成している。
【0074】
また、この発明の実施の形態1における内燃機関の制御装置は、排出ガスセンサの検出値に応じ、内燃機関への燃料噴射量を補正する燃料噴射量補正手段を備え、ヒータ制御装置は、内燃機関の自動始動後、目標ヒータ印加実効電圧を、内燃機関の運転中のセンサ素子目標温度になるまで、第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、第四制御期間は、内燃機関の自動始動後、燃料噴射量補正手段が動作を開始するまでに終了するよう設定され、第二制御期間、第三制御期間及び第四制御期間におけるヒータ消費電力量の合計が最小となるよう設定される。
【0075】
また、この発明の実施の形態1におけるヒータ制御装置は、内燃機関の自動停止開始からの経過時間を計測する自動停止経過時間計測手段を備え、第二制御期間終了判定手段は
、自動停止経過時間計測手段によって計測された自動停止開始からの経過時間が、第二制御期間終了時間を経過した際に、第二制御期間の終了を判定する。
【0076】
また、この発明の実施の形態1における第二制御期間終了時間は、内燃機関の自動停止開始から、排出ガスセンサのセンサ素子温度が内燃機関の自動停止中のセンサ素子目標温度に到達するまでの時間に設定される。
【0077】
従って、この発明の実施の形態1の内燃機関の制御装置によれば、内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量を従来技術に比べ低減することができる。また、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にできるため、排出ガスを悪化させることがない。
【0078】
実施の形態2.
次に、この発明の実施の形態2の内燃機関の制御装置における排出ガスセンサのヒータ制御装置について説明する。本実施の形態2では、実施の形態1に対し、内燃機関101の自動停止/自動始動が連続する場合の補正方法を示す。
【0079】
実施の形態2は、実施の形態1に対し、以下の点が異なるものである。
即ち、図6は、実施の形態2の特徴的な制御を説明するフローチャートで、実施の形態1の図4に対して、図6にはステップS602〜S608が追加され、ステップS601、S609、S610が変更されている。
以下、図6における図4からの変更点に関し説明する。
【0080】
図6において、まず、ステップS401において、キーオン等により制御装置107の初期化条件が成立したとき、ステップS601で、キーオンからキーオフまでの間の内燃機関101の自動停止/自動始動回数C_IS、自動停止開始からの経過時間T_IS_ON、自動始動開始からの経過時間T_IS_OF、及び、自動停止/自動始動が連続していることを示す自動停止/自動始動連続フラグF_REN、に0を格納し、初期化を行う。
【0081】
次に、ステップS403で、被水による素子割れ条件が不成立の場合、ステップS405で内燃機関101の自動停止開始時であるかを判定する。ステップS405で自動停止開始時と判定された場合、ステップS406で、自動停止/自動始動回数C_ISの前回値に1を加算し、自動停止/自動始動回数C_ISに格納し、ステップS602に進む。
【0082】
ステップS602で、内燃機関101の自動停止/自動始動が連続していると判定した場合、即ち、前回自動始動後の第四制御期間が終了する前に次の自動停止を開始した場合(自動始動開始からの経過時間が第四制御期間終了時間T2より短い場合)、ステップS603で、自動停止/自動始動連続フラグF_RENに1を格納し、ステップS604で
、第二制御期間302から第三制御期間303に移行するタイミングを決める第二制御期間終了時間T1を、自動始動開始からの経過時間が短いほど、短くなるよう補正する補正値K_REN_Tを下式(5)で演算する。
【0083】
K_REN_T=GAIN_T×(T_IS_OF ÷ T2) ・・・式(5)
【0084】
次に、ステップS605で、第三の目標印加実効電圧を、自動始動開始からの経過時間が短いほど、高くなるよう補正する補正値K_REN_Vを下式(6)で演算する。
【0085】
K_REN_V=GAIN_V×(T2 ÷ T_IS_OF) ・・・式(6)
【0086】
一方、ステップS602で、内燃機関101の自動停止/自動始動が連続していないと判定した場合、ステップS606で、自動停止/自動始動連続フラグF_RENに0を格納し、ステップS607で、補正値K_REN_Tに1を格納し、ステップS608で、補正値K_REN_Vに1を格納することで、自動停止/自動始動が連続している場合の補正を無効化する。
【0087】
次に、ステップS407で、自動始動開始からの経過時間T_IS_OFに0を格納することでT_IS_OFをリセットし、ステップS408へ進む。
一方、ステップS405で自動停止開始時と判定されなかった場合、ステップS408へ進む。
【0088】
ステップS408からステップS411までは、図4と同じ処理を行い、ステップS609で、自動停止開始からの経過時間T_IS_ONが、第二制御期間終了時間T1に補正値K_REN_Tを乗算した値より小さいとき、ステップS413で、ヒータ202への目標ヒータ印加実効電圧V_Tに、第二の目標印加実効電圧V_T2を格納する。
一方、ステップS609で、自動停止開始からの経過時間T_IS_ONが、第二制御期間終了時間T1に補正値K_REN_Tを乗算した値以上のとき、ステップS610で、目標ヒータ印加実効電圧V_Tに、第三の目標印加実効電圧V_T3に補正値K_REN_Vを乗算した値を格納する。
【0089】
なお、ステップS415以降は、図4と同じ処理となる。
【0090】
ここで、図7〜図9を用いて、内燃機関101の自動停止/自動始動が連続する場合に対し、実施の形態2により解決する課題とその効果を説明する。
【0091】
まず、図7を用いて、実施の形態2の補正を実施しなかった場合の課題について説明する。図7において、自動始動開始からの経過時間である701、702は、第四制御期間終了時間T2より短い、即ち、内燃機関101の前回自動始動後の第四制御期間が終了する前に次の自動停止を開始しており、内燃機関101の自動停止/自動始動が連続している状態である。
このとき、実施の形態2による第二制御期間終了時間T1の補正、又は、第3の目標印加実効電圧の補正を実施しない場合、第四制御期間中にセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308まで昇温する前に、内燃機関101が次の自動停止を開始し
、第二制御期間となりヒータを停止するため、図7(F)のセンサ素子温度704に示すように、センサ素子温度が内燃機関の自動停止中のセンサ素子目標温度310以下に低下している。この結果、図7における自動始動4のタイミングの後の空燃比フィードバック制御開始タイミング703までに、センサ素子温度704が内燃機関の運転中のセンサ素子目標温度308に到達できず、空燃比フィードバック制御開始が遅れ、遅れた間の排出ガスの悪化が生じる。又は、空燃比フィードバック制御開始を変更せずそのまま実行した場合、センサ素子が十分活性していない状態での不正確な検出信号を使用することになり
、やはり排出ガスの悪化が生じる。
【0092】
次に、図8を用いて、内燃機関101の自動停止/自動始動が所定期間内に連続するときに、第二制御期間終了時間T1を短く補正することによる効果について説明する。
即ち、図8において、自動始動開始からの経過時間である701、702が、第四制御期間終了時間T2より短い、即ち、内燃機関101の前回自動始動後の第四制御期間が終了する前に次の自動停止を開始しており、内燃機関101の自動停止/自動始動が連続している状態と判定されたとき、前回の自動始動から今回の自動停止までの時間が短いほど、第二制御期間終了時間T1を短くすることで、801、802のように、内燃機関の自動停止中のセンサ素子目標温度310を維持するための第3の目標印加実効電圧を、補正を実施しない場合に比べ早く印加することができ、803で示されるセンサ素子温度のように、センサ素子温度が内燃機関の自動停止中のセンサ素子目標温度310より低下することを防止できる。
この結果、自動始動4のタイミングの後の空燃比フィードバック制御開始タイミング703までに、センサ素子温度803が内燃機関の運転中のセンサ素子目標温度308に到達でき、内燃機関101の自動停止/自動始動が連続しているときにおいても、排気ガスが悪化しない。
【0093】
次に、図9を用いて、内燃機関101の自動停止/自動始動が所定期間内に連続するときに、第3の目標印加実効電圧を高く補正することによる効果について説明する。
即ち、図9において、自動始動開始からの経過時間である701、702が、第四制御期間終了時間T2より短い、即ち、内燃機関101の前回自動始動後の第四制御期間が終了する前に次の自動停止を開始しており、内燃機関101の自動停止/自動始動が連続している状態と判定されたとき、前回の自動始動から今回の自動停止までの時間が短いほど、901のように、第3の目標印加実効電圧を高くすることで、902に示すセンサ素子温度のように第三制御期間中にセンサ素子温度を昇温させることができる。
この結果、自動始動4のタイミングの後の空燃比フィードバック制御開始タイミング703までに、センサ素子温度902が内燃機関の運転中のセンサ素子目標温度308に到達でき、内燃機関101の自動停止/自動始動が連続しているときにおいても、排気ガスが悪化しない。
【0094】
なお、上記実施の形態2における図8、図9では、内燃機関の自動停止/自動始動が連続するときに、第二制御期間終了時間T1を短く補正する場合と、第3の目標印加実効電圧を高く補正する場合とを、それぞれ分けて説明したが、第二制御期間終了時間T1を短く補正する場合と、第3の目標印加実効電圧を高く補正する場合とを、同時に実施してもよい。
【0095】
なお、上記実施の形態2における自動停止/自動始動の連続は、自動始動開始からの経過時間が、第四制御期間終了時間T2より短い、即ち、内燃機関の前回自動始動後の第四制御期間が終了する前に次の自動停止を開始する状態としたが、自動停止/自動始動の連続とは、内燃機関の自動始動後、排出ガスセンサが活性状態になる前に、再び内燃機関の自動停止を開始するような状態であり、例えば、所定期間内(例えば、10分間中)に、自動停止/自動始動の回数が所定回数以上実施される状態、といった他の方法で判定してもよい。
【0096】
以上のように、この発明の実施の形態2における排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、内燃機関の自動停止/自動始動が連続することを判定する、自動停止/自動始動連続判定手段を備え、自動停止/自動始動連続判定手段が、自動停止/自動始動が連続していると判定したとき、第二制御期間終了時間が短くなるよう補正されるものである。
【0097】
また、この発明の実施の形態2における排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、内燃機関の自動停止/自動始動が連続することを判定する、自動停止/自動始動連続判定手段を備え、自動停止/自動始動連続判定手段が、自動停止/自動始動が連続していると判定したとき、第3の目標印加実効電圧が高くなるよう補正されるものである。
【0098】
また、この発明の実施の形態2における自動停止/自動始動の連続とは、内燃機関の自動始動後、排出ガスセンサが活性状態になる前に、再び内燃機関の自動停止を開始する状態である。
【0099】
以上のようにこの発明の実施の形態2によれば、実施の形態1の発明に対し、内燃機関の自動停止/自動始動が連続するときに、第二制御期間終了時間を短く補正、又は、第3の目標印加実効電圧を高く補正することで、排気ガスの悪化を防止することが可能となる。
【0100】
実施の形態3.
次に、この発明の実施の形態3の内燃機関の制御装置における排出ガスセンサのヒータ制御装置について説明する。本実施の形態3では、実施の形態1に対し、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合について示す。
【0101】
実施の形態3は、実施の形態1に対し、以下の点が異なるものである。
即ち、図10は、実施の形態3の特徴的な制御を説明するフローチャートで、実施の形態1の図4に対して、図10にはステップS1001〜S1005が追加され、ステップS1006が変更されている。
以下、図10における図4からの変更点に関し説明する。
【0102】
図10において、ステップS412で、自動停止開始からの経過時間T_IS_ONが第二制御期間終了時間T1以上のとき、即ち、第三制御期間であるとき、ステップS1001へ進み、排出ガスセンサの周辺温度ETが、排出ガスセンサの周辺温度の基準値ET_NRMにばらつき許容量ET_Zを加算した値より大きいかを判定する。ステップS1001で、大きいと判定された場合は、ステップS1002で、センサ周辺温度が高いほど補正係数K_Aが小さくなるよう、例えば、下式(7)により、補正係数K_Aを演算し、ステップS1006へ進む。
【0103】
K_A=ET_G1×(1−(ET−(ET_NRM+ET_Z))÷ET_NRM)
・・・式(7)
ここで、ET_G1は、排出ガスセンサの周辺温度ETが、基準値ET_NRMより大きい場合のゲインである。
【0104】
次に、ステップS1001で、大きくないと判定された場合は、ステップS1003で
、排出ガスセンサの周辺温度ETが、排出ガスセンサの周辺温度の基準値ET_NRMにばらつき許容量ET_Zを減算した値より小さいかを判定する。
ステップS1003で、小さいと判定された場合は、ステップS1004で、センサ周辺温度が低いほど補正係数K_Aが大きくなるよう、例えば、下式(8)により、補正係数K_Aを演算し、ステップS1006へ進む。
【0105】
K_A=ET_G2×(1−(ET−(ET_NRM+ET_Z))÷ET_NRM)
・・・式(8)
ここで、ET_G2は、排出ガスセンサの周辺温度ETが、基準値ET_NRMより小さい場合のゲインである。
【0106】
次に、ステップS1003で、小さくないと判定された場合は、ステップS1005で、補正係数K_Aに1を格納することで、排出ガスセンサの周辺温度にばらつきがある場合の補正を無効化し、ステップS1006へ進む。
補正係数K_Aの演算が完了すると、ステップS1006で、第3の目標印加実効電圧に補正係数K_Aを乗算する。
【0107】
ここで、排出ガスセンサの周辺温度ETは、センサ素子温度の上昇/下降に影響する因子であり、内燃機関101のエンジン回転速度や負荷などの運転状態、内燃機関101から排出される排出ガスの温度、排出ガスセンサの取り付け位置周辺の排気管壁面温度、触媒104の温度、外気温、のいずれか、又は、複数、又は、全てに基づいて推定される。
例えば、各種センサ108で排出ガスセンサ近傍の排出ガスの温度を測定している場合、排出ガスの温度をセンサ周辺温度ETとして使用してもよい。
また、例えば、各種センサ108で外気温を測定している場合、内燃機関101の自動停止直前の運転状態(エンジン回転速度やエンジン負荷、など)から自動停止時の排出ガスセンサの周辺温度ET0を推定し、自動停止開始からの経過時間T_IS_ONと外気温度に応じた温度低下係数を予め適合などによりマップ設定し、自動停止時の排出ガスセンサの周辺温度ET0にマッピングした温度低下係数を乗算して、排出ガスセンサの周辺温度ETを推定してもよい。
【0108】
ここで、基準値ET_NRMとは、例えば、第二制御期間終了時間T1を上記段落[0041]のように適合試験により設定したときのセンサ周辺温度であり、センサ周辺温度が、内燃機関101から排出される排出ガスの温度、排出ガスセンサの取り付け位置周辺の排気管壁面温度、触媒104の温度、外気温、などの影響によって、変動する前の基準値である。
【0109】
ここで、ばらつき許容量ET_Zとは、センサ周辺温度ETが基準値ET_NRMと異なったとしても、センサ素子温度への影響が小さく許容できる量を基準値からの差分で定義し、予め適合などにより設定する量である。
【0110】
なお、本実施の形態3では、排出ガスセンサの周辺温度ETとして、演算毎に最新の値を用いて補正値K_Aの演算を行うように構成しているが、第二制御期間302から第三制御期間303へ切り替わったときの排出ガスセンサの周辺温度ETを制御装置107のRAM上に記憶し、第三制御期間303の終了まで使用し、補正値K_Aの演算を行ってもよい。
もしくは、第一制御期間301から第二制御期間302へ切り替わったときの排出ガスセンサの周辺温度ET、即ち、内燃機関101の自動停止が開始されたときの排出ガスセンサの周辺温度ETを、制御装置107のRAMに記憶し、第三制御期間303で使用し、補正値K_Aの演算を行ってもよい。
【0111】
なお、本実施の形態3では、ステップS1006で、センサ周辺温度ETと基準値ET_NRM±ばらつき許容量ET_Zとの差分に応じ、第3の目標印加実効電圧に補正係数K_Aを乗算するような構成にしているが、センサ周辺温度ETと基準値ET_NRM±ばらつき許容量ET_Zとの差分に応じ、第3の目標印加実効電圧に補正係数を加減算するような構成にしても同様の効果が得れる。
【0112】
ここで、図11、図12を用いて、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合に対し、実施の形態3により解決する課題とその効果を説明する。
【0113】
まず、図11を用いて、実施の形態3の補正、即ち、第3の目標印加実効電圧を、センサ周辺温度が低いほど高く、高いほど低くする補正を実施しなかった場合の課題について説明する。
図11(G)において、第二制御期間302の直前、即ち、内燃機関101の自動停止開始直前のセンサ周辺温度は、自動停止開始直前の運転状態、内燃機関101から排出される排出ガスの温度、排出ガスセンサの取り付け位置周辺の排気管壁面温度、触媒104の温度、外気温、等に依存し、例えば、自動停止直前に、車両のアイドル状態、かつ、外気温が低いような場合、排気温度が低いため、センサ周辺温度も低い状態で自動停止が開始され、また、低い外気温により外部から排気管等を通じ冷やされ、センサ周辺温度は、基準となる基準値の挙動1101に対し、1102のように低くなる。一方、例えば、自動停止直前に、排気温度が高くなるような内燃機関の高負荷運転をしていた場合、排気温度が高いため、センサ周辺温度も高い状態で自動停止が開始され、センサ周辺温度は、基準となる基準値の挙動1101に対し、1103のように高くなる。
【0114】
ここで、実施の形態3の補正を実施しなかった場合、センサ素子温度は、センサ周辺温度の影響を受け、図11(F)のように、センサ周辺温度が低い1102の場合、センサ素子温度は1105のように低くなり、センサ周辺温度が高い1103の場合、センサ素子温度は1106のように高くなる。ここで、この影響が問題となるのは、内燃機関の自動始動後である第四制御期間304である。即ち、センサ周辺温度の違いによりセンサ素子温度の昇温速度が変わり、特に、センサ周辺温度が低い1102の場合、センサ素子温度の昇温が遅くなり、空燃比フィードバック制御開始までに排出ガスセンサのセンサ素子温度が内燃機関の運転時のセンサ素子目標温度308に到達できない恐れがある。
【0115】
次に、図12を用いて、実施の形態3の補正を実施した場合の効果について説明する。
まず、センサ周辺温度が基準のセンサ周辺温度1101より低い1102で示されるセンサ周辺温度の場合、センサ周辺温度ETと基準値ET_NRM−ばらつき許容量ET_Zとの差分に応じ、図12(E)の1202のようにヒータへの目標印加実効電圧は、基準の目標印加実効電圧1201に比べ、高く設定される。これにより、図12(F)の1204のように、第三制御期間中のセンサ素子温度が、内燃機関の自動停止中のセンサ素子目標温度310に保温される基準のセンサ素子温度1104に対し高くなることで、第四制御期間におけるセンサ素子温度1204は、基準のセンサ素子温度1104の第四制御期間における挙動に近くなる。このため、空燃比フィードバック制御開始までにセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できるようになる。
【0116】
次に、センサ周辺温度が基準のセンサ周辺温度1101より高い1103で示されるセンサ周辺温度の場合、センサ周辺温度ETと基準値ET_NRM+ばらつき許容量ET_Zとの差分に応じ、図12(E)の1203のようにヒータへの目標印加実効電圧は、基準の目標印加実効電圧1201に比べ、低く設定される。これにより、図12(F)の1205のように、第三制御期間中のセンサ素子温度は、内燃機関の自動停止中のセンサ素子目標温度310に保温される基準のセンサ素子温度1104に対し低くなることで、第四制御期間におけるセンサ素子温度1205は、基準のセンサ素子温度1104の第四制御期間における挙動に近くなる。このため、第三制御期間中に第3の目標印加実効電圧を下げることによる消費電力量の低減効果を得れ、また、空燃比フィードバック制御開始までにセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できる。
【0117】
以上のように、この発明の実施の形態3の排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、排出ガスセンサの周辺温度を推定するセンサ周辺温度推定手段を備え、第3の目標印加実効電圧は、センサ周辺温度推定手段によって推定されるセンサ周辺温度に応じて補正されるように構成している。
【0118】
実施の形態3のように構成することで、実施の形態1の発明に対し、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合において、第3の目標印加実効電圧を、センサ周辺温度が基準値より低いほど高く、高いほど低くする補正することで、センサ周辺温度が基準値より低い場合には、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にでき、排出ガスの悪化を防止し、センサ周辺温度が基準値より高い場合には、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にでき、排出ガスの悪化を防止する上、第三制御期間におけるヒータの消費電力量を低減できる。
【0119】
実施の形態4.
次に、この発明の実施の形態4における排出ガスセンサのヒータ制御装置について説明する。本実施の形態4では、実施の形態1に対し、さらに消費電力量を低減する方法を示す。
【0120】
実施の形態4は、実施の形態1に対し、以下の点が異なるものである。
即ち、図13は、実施の形態4の特徴的な制御を説明するフローチャートで、実施の形態1の図4に対して、図13にはステップS1301が追加され、ステップS1302が変更されている。
以下、図13における図4からの変更点に関し説明する。
【0121】
図13において、ステップS412で、自動停止開始からの経過時間T_IS_ONが第二制御期間終了時間T1以上のとき、即ち、第三制御期間であるとき、ステップS1301へ進み、下式(9)で示される内燃機関の自動停止開始からの経過時間が長くなるほど大きくなるような補正係数K_T3を演算し、ステップS1302に進む。
【0122】
K_T3=IST_G×(T_IS_ON−T1)÷(T_IS_ON_MAX−T1)+IST_OFST ・・・式(9)
【0123】
ステップS1302では、第3の目標印加実効電圧V_T3に補正係数K_T3乗算したものと、第3の目標印加実効電圧の上限値V_T3MAXと比較し、小さい方を目標ヒータ印加実効電圧V_Tに格納する。
【0124】
ここで、最大自動停止時間T_IS_ON_MAXは、例えば、内燃機関の自動停止中に、電気負荷等による電力消費によりバッテリの充電状態が低下し、内燃機関の自動始動ができなくなる前に、即ち、バッテリが上がる前に、内燃機関を自動始動させ、内燃機関を動力とする発電機によりバッテリを充電させるべく、予め設定された自動停止時間の最大時間であり、自動停止がこの最大時間以上となったとき、運転者の車両発進意図がなくとも内燃機関は自動始動する。
【0125】
ここで、ゲインIST_Gは、例えば、自動停止開始からの経過時間に対し、第3の目標印加実効電圧V_T3をどの程度大きく補正するかを調整する。
【0126】
ここで、オフセット量IST_OFSTは、例えば、0以上1以下の値とし、第3の目標印加実効電圧V_T3に対し、どの程度オフセットさせるかを調整する。
【0127】
ここで、第3の目標印加実効電圧の上限値V_T3MAXは、例えば、内燃機関の自動停止中に、ヒータによる加熱でセンサ素子温度を内燃機関の運転中のセンサ素子目標温度308に維持するような目標印加実効電圧、もしくは、それ以下の値に設定される。
【0128】
なお、第三の目標印加実効電圧V_T3に補正係数K_T3乗算したものと、第3の目標印加実効電圧の上限値V_T3MAXと比較し、小さい方を目標ヒータ印加実効電圧V_Tに格納することで上限クリップを設けたが、上限値V_T3MAXと比較し小さい方を選択することをせず、第三制御期間開始から所定時間経過した時点で、その時点の目標ヒータ印加実効電圧V_T(=V_T3×K_T3)でクリップする方法でもよい。
【0129】
ここで、図14のタイムチャートを参照しながら、実施の形態4により解決する課題とその効果を説明する。
【0130】
まず、実施の形態4の補正を実施しなかった場合の課題について説明する。
内燃機関の自動停止開始後、運転者の車両発進意図があったとき(例えば、アクセルペダルやクラッチペダルの踏み込み、ブレーキペダルの解除、など)に自動始動するような自動停止/自動始動装置においては、いつ、自動停止が解除され自動始動されるかを、制御装置107は予め分からない。このため、実施の形態1では、第3の目標印加実効電圧を
上記段落[0045]で示したような方法で、固定値として設定し、どのタイミングで自動始動されても、空燃比フィードバック制御開始より前にセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できるように設定されている。
しかしながら、図14(G)のセンサ周辺温度1401に示すように、第三制御期間の前部では、第三制御期間の後部に比べ、センサ周辺温度が高い。このため、この第三制御期間の前部で自動始動があった場合、第三制御期間の後部で自動始動があった場合に比べ、自動始動後に、排出ガスセンサのセンサ素子温度が、内燃機関の運転中のセンサ素子目標温度308に到達する時間は短くなる。従って、第三制御期間の前部の第3の目標印加実効電圧を、第三制御期間の後部の第3の目標印加実効電圧に比べ、低く補正すれば、さらに消費電力量を低減できる。
【0131】
次に、実施の形態4の補正を実施した場合の効果について説明する。
即ち、図14(E)の1402のように、目標印加実効電圧を第三制御期間の後部に比べ、第三制御期間の前部を低く補正することで、図14(H)の1404のように前部の消費電力量を低減することができ、この間に内燃機関の自動始動があった場合に、実施の形態1に比べ、消費電力量を低減することができる。
【0132】
また、図14(E)の1402のように、第三制御期間の後部を第3の目標印加実効電圧307より高く補正することで、図14(E)の1403のように、第四制御期間の昇温のための目標印加実効電圧を低くすることができ、図14(H)の1406のように消費電力量を低減することができる。
【0133】
ここで、図14(H)の1405の消費電力量増加分があるが、1405と1406の差し引きの消費電力量が小さくなるように予め適合などにより、式(9)のゲインIST_Gと、オフセット量IST_OFSTを設定する。
【0134】
つまり、最大自動停止時間T_IS_ON_MAXに対し、自動停止開始からの経過時間が長くなるにつれ、即ち、最大自動停止時間T_IS_ON_MAXに近づくにつれ、自動始動する可能性が高くなり、自動停止中の余熱温度を上げておくことで、自動始動後の昇温のための消費電力を抑えることができる。
【0135】
以上のように、この発明の実施の形態4における排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、第3の目標印加実効電圧は、自動停止経過時間計測手段によって計測される自動停止開始からの経過時間が長いほど高く補正されるように構成している。
【0136】
従って、実施の形態4のように構成することで、実施の形態1の発明に対し、第3の目標印加実効電圧を、自動停止経過時間計測手段によって計測された自動停止開始からの経過時間が長いほど高く補正することで、実施の形態1に比べ、さらに消費電力量を低減することができる。
【0137】
実施の形態5.
次に、この発明の実施の形態5における排出ガスセンサのヒータ制御装置について説明する。本実施の形態5では、実施の形態1に対し、さらに消費電力を低減する方法を示す。
【0138】
実施の形態5は、実施の形態1に対し、以下の点が異なるものである。
即ち、図15は、実施の形態5の特徴的な制御を説明するフローチャートで、実施の形態1の図4に対して、図15にはステップS1501〜S1506が追加され、ステップS1507、S1508が変更されている。
以下、図15における図4からの変更点に関し説明する。
【0139】
図15において、ステップS415で内燃機関の自動始動開始時と判定された場合、ステップS1501で、内燃機関の自動停止開始から自動停止終了までの自動停止時間として、この時点での自動停止開始からの経過時間T_IS_ONを、自動停止時間T_ISに格納し、ステップS416で、自動停止開始からの経過時間T_IS_ONに0を格納しリセットした上でステップS417へ進む。一方、ステップS415で自動始動開始時と判定されなかった場合、ステップS417へ進む。
ステップS417では、自動始動開始からの経過時間T_IS_OFの前回値に演算処理周期を加算し、経過時間T_IS_OFに格納の上、ステップS1502に進む。
【0140】
次に、ステップS1502で、自動停止時間T_ISが、第二制御期間終了時間T1以下のとき、即ち、第二制御期間中に自動始動したとき、ステップS1503で、第四制御期間終了時間T2に補正値K_T2Aを乗算した値を補正後の第四制御期間終了時間T2Cに格納し、ステップS1504で、第4の目標印加実行電圧V_T4を補正する補正値K_T4に、第二制御期間で自動始動した場合の補正値K_T4Aを格納する。
一方、ステップS1502で、自動停止時間T_ISが、第二制御期間終了時間T1より大きいとき、即ち、第三制御期間中に自動始動したとき、ステップS1505で、第四制御期間終了時間T2に補正値K_T2Bを乗算した値を補正後の第四制御期間終了時間T2Cに格納し、ステップS1506で、第4の目標印加実行電圧V_T4を補正する補正値K_T4に、第三制御期間で自動始動した場合の補正値K_T4Bを格納する。
【0141】
ここで、補正値K_T2A、K_T2B、K_T4A、K_T4Bは、例えば以下の式(10)〜(13)で演算される。
【0142】
K_T2A=T2A_G×T_IS÷T1+T2A_OFST・・・式(10)
K_T2B=T2B_G×(T_IS−T1)÷(T_IS_ON_MAX−T1)+T2B_OFST ・・・式(11)
K_T4A=T4A_G×T_IS÷T1+T4A_OFST・・・式(12)
K_T4B=T4B_G×(T_IS−T1)÷(T_IS_ON_MAX−T1)+T4B_OFST ・・・式(13)
【0143】
但し、T2A_G、T2B_G、T4A_G、T4B_Gはゲイン、T2A_OFST、T2B_OFST、T4A_OFST、T4B_OFSTはオフセットであり、自動停止時間T_ISに対する線形関数となっている。
即ち、自動停止時間T_ISが短いほど、補正値K_T2A、K_T2B、K_T4A、K_T4Bは、小さくなるように演算され、自動停止時間T_ISが短いほど、第四制御期間にヒータに印加する印加実効電圧は低くなり、印加期間は短くなる。
【0144】
次に、ステップS1507に進み、自動始動開始からの経過時間T_IS_OFが、ステップS1503、又は、ステップS1505で補正された補正後の第四制御期間終了時間T2C未満のとき、ステップS1508で、目標ヒータ印加実効電圧V_Tに、第4の目標印加実行電圧V_T4に補正値K_T4を乗算したものを格納する。一方、ステップS1507で、自動始動開始からの経過時間T_IS_OFが補正後の第四制御期間終了時間T2C以上のとき、ステップS420で、目標ヒータ印加実効電圧V_Tに、第1の目標印加実効電圧V_T1を格納する。
【0145】
なお、補正値K_T2A、K_T2B、K_T4A、K_T4Bは、自動停止時間T_ISに対する線形関数で設定する方法を述べたが、自動停止時間T_ISのテーブルにて設定してもよい。
【0146】
ここで、図16、図17を用いて、実施の形態5により解決する課題とその効果を説明する。
【0147】
まず、図16を用いて、実施の形態5の補正を実施しなかった場合の課題について説明する。
図16(A)において、自動始動1のタイミングで自動始動する場合を基準とし、自動始動のタイミングが自動始動2のタイミングであった場合を例に説明する。
実施の形態1では、第四制御期間304におけるセンサ素子温度の昇温のためのヒータへの印加実効電圧を上記段落[0046]による方法で空燃比フィードバック制御開始までに内燃機関の自動停止中のセンサ素子目標温度310に到達するよう設定している。
即ち、センサ周辺温度が最も低くなる最大自動停止時間T_IS_ON_MAXで自動始動する場合のような最も昇温速度が遅くなるような場合に対しても空燃比フィードバック制御開始までに内燃機関の自動停止中のセンサ素子目標温度310に到達するよう設定している。
従って、図16(E)に示すように、自動始動1のタイミングより自動停止時間が短くなる自動始動2のタイミングで自動始動した場合の印加実効電圧1602は、自動始動1のタイミングで自動始動した場合の1601と同じになる。
しかしながら、図16(G)に示すように、自動始動1のタイミングで自動始動したときのセンサ周辺温度Aに対し、自動始動2のタイミングで自動始動したときのセンサ周辺温度Bは高いため、図16(F)に示すように、センサ素子温度は、1603に比べ、1604の方が高くなる。このとき、ヒータ消費電力は、図16(H)に示すように、1605、1606ともに同じであることから、自動始動2のタイミングで自動始動した場合のヒータへの印加実効電圧を下げ、センサ素子温度を1603相当にするとヒータの消費電力量の低減を見込める。
【0148】
次に、図17を用いて、実施の形態5の補正を実施した場合の効果について説明する。
まず、実施の形態5によって、自動停止時間T_ISに応じて、第四制御期間にヒータに印加する印加期間を補正した場合の効果について説明する。
図17(D)における補正後の第四制御期間終了時間T2C(1701)は、上記段落[0042]で説明した第四制御期間終了時間T2を基準とし、内燃機関の自動停止時間が短いほど、短くなるよう設定される。即ち、自動停止時間が短いとき、図17(G)に示すように、自動始動1のタイミングで自動始動したときのセンサ周辺温度Aに対し、自動始動2のタイミングで自動始動したときのセンサ周辺温度Bは高いため、自動始動1のタイミングで自動始動したときに比べ、第4の目標印加実効電圧(許容最大印加実効電圧14V)を印加する時間が短くても、図17(F)の1705に示すように、空燃比フィードバック制御実施開始までに内燃機関の運転中のセンサ素子目標温度308に到達することができ、かつ、図17(H)に示すようにヒータ消費電力1707は、補正しない場合である図16(H)に示すヒータ消費電力1606より小さくできる。即ち、ヒータの消費電力を低減することができる。
【0149】
次に、実施の形態5によって、自動停止時間T_ISに応じて、第四制御期間にヒータに印加する印加実効電圧を補正した場合の効果について説明する。
図17(E)における補正後の第4の目標印加実効電圧V_T4×K_T4(1702)は、第4の目標印加実効電圧V_T4を基準とし、内燃機関の自動停止時間が短いほど、低くなるよう設定される。即ち、自動停止時間が短いとき、図17(G)に示すように、自動始動1のタイミングで自動始動したときのセンサ周辺温度Aに対し、自動始動2のタイミングで自動始動したときのセンサ周辺温度Bは高いため、自動始動1のタイミングで自動始動したときに比べ、第4の目標印加実効電圧が低くても、図17(F)の1706に示すように、空燃比フィードバック制御実施開始までに内燃機関の運転中のセンサ素子目標温度308に到達することができ、かつ、図17(H)に示すようにヒータ消費電力1708は、補正しない場合である図16(H)に示すヒータ消費電力1606より小さくできる。即ち、ヒータの消費電力を低減することができる。
【0150】
なお、上記実施の形態5における図17では、内燃機関の自動停止時間が短いほど、第四制御期間終了時間T2を短く補正する場合と、第4の目標印加実効電圧V_T4を低く補正する場合とを、それぞれ分けて説明したが、第四制御期間終了時間T2を短く補正する場合と、第4の目標印加実効電圧V_T4を低く補正する場合とを、同時に実施してもよい。
【0151】
以上のように、この発明の実施の形態5の排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、内燃機関の自動停止開始から自動停止終了までの自動停止時間を計測する自動停止時間計測手段と、内燃機関の自動始動後、目標ヒータ印加実効電圧を、内燃機関の運転中のセンサ素子目標温度になるまで、第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、第四制御期間において、第4の目標印加実効電圧と第4の目標印加実効電圧を印加する印加期間のいずれか1つ、または、両方は、自動停止時間計測手段によって計測された自動停止時間に応じて補正されるように構成している。
【0152】
従って、実施の形態5のように構成することで、実施の形態1の発明に対し、内燃機関の自動停止時間が短いほど、第四制御期間終了時間T2を短く補正、又は、第4の目標印加実効電圧V_T4を低く補正することで、実施の形態1に比べ、さらに消費電力量を低減することができる。
【0153】
実施の形態6.
次に、この発明の実施の形態6における排出ガスセンサのヒータ制御装置について説明する。本実施の形態6では、実施の形態1に対し、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合について示し、実施の形態3とは異なる方法を用いる。
【0154】
実施の形態6は、実施の形態1に対し、以下の点が異なるものである。
即ち、図18は、実施の形態6の特徴的な制御を説明するフローチャートで、実施の形態1の図4に対して、図18にはステップS1801〜S1810が追加され、ステップS1811、S1812が変更されている。
以下、図18における図4からの変更点に関し説明する。
【0155】
図18において、まず、ステップS401〜S415は、図4と同じ処理になる。
次に、ステップS1801〜S1805は、図10におけるステップS1001〜S1005と同様の処理になる。即ち、図18において、まず、ステップS1801で、排出ガスセンサの周辺温度ETが、排出ガスセンサの周辺温度の基準値ET_NRMにばらつき許容量ET_Zを加算した値より大きいかを判定する。ステップS1801で、大きいと判定された場合は、ステップS1802で、センサ周辺温度が高いほど補正係数K_Aが小さくなるよう、例えば、下式(14)により、補正係数K_Aを演算し、ステップS1806へ進む。
【0156】
K_A=ET_G1×(1−(ET−(ET_NRM+ET_Z))÷ET_NRM)
・・・式(14)
ここで、ET_G1は、排出ガスセンサの周辺温度ETが、基準値ET_NRMより大きい場合のゲインである。
【0157】
次に、ステップS1801で、大きくないと判定された場合は、ステップS1803で
、排出ガスセンサの周辺温度ETが、排出ガスセンサの周辺温度の基準値ET_NRMにばらつき許容量ET_Zを減算した値より小さいかを判定する。ステップS1803で、小さいと判定された場合は、ステップS1804で、センサ周辺温度が低いほど補正係数K_Aが大きくなるよう、例えば、下式(15)により、補正係数K_Aを演算し、ステップS1806へ進む。
【0158】
K_A=ET_G2×(1−(ET−(ET_NRM+ET_Z))÷ET_NRM)
・・・式(15)
ここで、ET_G2は、排出ガスセンサの周辺温度ETが、基準値ET_NRMより小さい場合のゲインである。
【0159】
次に、ステップS1803で、小さくないと判定された場合は、ステップS1805で、補正係数K_Aに1を格納することで、排出ガスセンサの周辺温度にばらつきがある場合の補正を無効化し、ステップS1806へ進む。
【0160】
なお、基準値ET_NRM、及び、ばらつき許容量ET_Zは、上記段落[0108][0109]と同じである。
【0161】
次に、ステップS1806〜S1812は、図15におけるステップS1502〜S1508と同様の処理になる。
即ち、図18において、まず、ステップS1806で、自動停止時間T_ISが、第二制御期間終了時間T1以下のとき、即ち、第二制御期間中に自動始動したとき、ステップS1807で、補正係数K_AにゲインET2A_Gを乗算したものを、第四制御期間終了時間T2に乗算した値を補正後の第四制御期間終了時間T2Cに格納し、ステップS1808で、補正係数K_Aに第二制御期間で自動始動した場合のゲインET4A_Gを乗算したものを、第4の目標印加実行電圧V_T4を補正する補正値K_T4に、格納する。
【0162】
一方、ステップS1806で、自動停止時間T_ISが、第二制御期間終了時間T1より大きいとき、即ち、第三制御期間中に自動始動したとき、ステップS1809で、補正係数K_AにゲインET2B_Gを乗算したものを、第四制御期間終了時間T2に乗算した値を補正後の第四制御期間終了時間T2Cに格納し、ステップS1810で、補正係数K_Aに第三制御期間で自動始動した場合のゲインET4B_Gを乗算したものを、第4の目標印加実行電圧V_T4を補正する補正値K_T4に、格納する。
【0163】
即ち、センサ周辺温度が低いほど補正係数K_Aが大きく、センサ周辺温度が高いほど補正係数K_Aが小さくなるものであるので、センサ周辺温度が低いほど、第四制御期間にヒータに印加する印加実効電圧は高く、印加期間は長く補正され、センサ周辺温度が高いほど、第四制御期間にヒータに印加する印加実効電圧は低く、印加期間は短く補正される。
【0164】
次に、ステップS1811に進み、自動始動開始からの経過時間T_IS_OFが、ステップS1807、又は、ステップS1809で補正された補正後の第四制御期間終了時間T2C未満のとき、ステップS1812で、目標ヒータ印加実効電圧V_Tに、第4の目標印加実行電圧V_T4に補正値K_T4を乗算したものを格納する。一方、ステップS1811で、自動始動開始からの経過時間T_IS_OFが補正後の第四制御期間終了時間T2C以上のとき、ステップS420で、目標ヒータ印加実効電圧V_Tに、第1の目標印加実効電圧V_T1を格納する。
【0165】
ここで、図19、図20を用いて、排出ガスセンサの周辺温度が基準温度と異なる場合
、即ち、排出ガスセンサの周辺温度にばらつきがある場合に対し、実施の形態6により解決する課題とその効果を説明する。
なお、実施の形態6の補正を実施しなかった場合の課題は、実施の形態3における図11の説明である段落[0113]〜[0114]と同じである。
【0166】
次に、実施の形態6の補正を実施した場合の効果について説明する。
まず、図19を用いて、センサ周辺温度に応じて、第四制御期間にヒータに印加する印加期間を補正した場合の効果について説明する。
【0167】
まず、センサ周辺温度が基準のセンサ周辺温度1101より低い1102で示されるセンサ周辺温度の場合、センサ周辺温度ETと基準値ET_NRM−ばらつき許容量ET_Zとの差分に応じ、図19(D)の1901に示されるように補正後の第四制御期間終了時間T2Cは、第四制御期間終了時間T2に対し、長くなる。従って、図19(E)の1904に示されるように、第四制御期間における第4の目標印加実効電圧(許容最大印加実効電圧14V)の印加期間は、1903で示される基準の印加期間に比べ、長く設定される。これにより、図19(F)のように、センサ素子温度1907は、空燃比フィードバック制御開始までにセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達でき、排気ガスは悪化しない。
【0168】
次に、センサ周辺温度が基準のセンサ周辺温度1101より高い1103で示されるセンサ周辺温度の場合、センサ周辺温度ETと基準値ET_NRM+ばらつき許容量ET_Zとの差分に応じ、図19(D)の1902に示されるように補正後の第四制御期間終了時間T2Cは、第四制御期間終了時間T2に対し、短くなる。従って、図19(E)の1905に示されるように、第四制御期間における第4の目標印加実効電圧(許容最大印加実効電圧14V)の印加期間は、1903で示される基準の印加期間に比べ、短く設定される。これにより、図19(F)のように、センサ素子温度1908の過昇温により排出ガスセンサが故障することを防げ、第4の目標印加実効電圧の印加期間を短くする分、ヒータ消費電力量を低減できる。また、空燃比フィードバック開始までにセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できる。
【0169】
次に、図20を用いて、センサ周辺温度に応じて、第四制御期間にヒータに印加する印加実効電圧を補正した場合の効果について説明する。
【0170】
まず、センサ周辺温度が基準のセンサ周辺温度1101より低い1102で示されるセンサ周辺温度の場合、センサ周辺温度ETと基準値ET_NRM−ばらつき許容量ET_Zとの差分に応じ、第四制御期間における目標ヒータ印加実効電圧を第4の目標印加実効電圧より高く補正することになるが、第4の目標印加実効電圧として、許容最大印加実効電圧14Vを設定している場合、これ以上、印加実効電圧を上げることができない。
したがって、この場合、センサ周辺温度に応じて、第四制御期間にヒータに印加する印加実効電圧を補正する方法では効果を望めないため、図19による方法を用いるとよい。
【0171】
一方、センサ周辺温度が基準のセンサ周辺温度1101より高い1103で示されるセンサ周辺温度の場合、センサ周辺温度ETと基準値ET_NRM+ばらつき許容量ET_Zとの差分に応じ、図20(E)の2001に示されるように、第四制御期間における目標ヒータ印加実効電圧を第4の目標印加実効電圧より低く設定する。これにより、図20(F)のように、第四制御期間におけるセンサ素子温度2002は、基準のセンサ素子温度2003の第四制御期間における挙動に近くなる。これにより、センサ素子温度2002の過昇温より排出ガスセンサが故障することを防げ、第四制御期間における目標ヒータ印加実効電圧を第4の目標印加実効電圧より低くする分、ヒータ消費電力量を低減できる。また、空燃比フィードバック開始までにセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できる。
【0172】
以上のように、この発明の実施の形態6における排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、排出ガスセンサの周辺温度を推定するセンサ周辺温度推定手段と、内燃機関の自動始動後、目標ヒータ印加実効電圧を、内燃機関の運転中のセンサ素子目標温度になるまで、第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、第四制御期間において、第4の目標印加実効電圧と第4の目標印加実効電圧を印加する印加期間のいずれか1つ、または、両方は、センサ周辺温度推定手段によって推定されるセンサ周辺温度に基づき補正されるように構成している。
【0173】
従って、実施の形態6のように構成することで、実施の形態1の発明に対し、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合において、センサ周辺温度が基準値より低いほど、第四制御期間終了時間T2を長く補正することで、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にでき、排出ガスの悪化を防止でき、センサ周辺温度が基準値より高いほど、第四制御期間終了時間T2を短く補正、または、第4の目標印加実効電圧を低く補正することで、センサ素子の過昇温による排出ガスセンサの故障を防止し、ヒータ消費電力量を低減できる。
【0174】
実施の形態7.
次に、この発明の実施の形態7における排出ガスセンサのヒータ制御装置について説明する。本実施の形態7では、実施の形態1に対し、第1の目標印加実効電圧、第2の目標印加実効電圧、第3の目標印加実効電圧を、排出ガスセンサのセンサ素子インピーダンスを基に設定するものである。
即ち、排出ガスセンサのヒータ制御装置112が、センサ素子温度と相関のあるセンサ素子インピーダンスを計測するインピーダンス計測手段を備えた制御装置であれば、インピーダンス計測手段によりセンサ素子インピーダンスを計測し、センサ素子インピーダンスが目標センサ素子インピーダンスとなるような目標ヒータ印加実効電圧を設定する。
【0175】
なお、センサ素子温度とセンサ素子インピーダンスは、例えば、図30(a)の3002に示すような相関関係があり、センサ素子温度が高くなるほど、センサ素子インピーダンスが小さくなる関係にある。
【0176】
なお、センサ素子インピーダンスが目標センサ素子インピーダンスとなるよう、ヒータへの印加実効電圧を調整する方法としては、例えば、計測したセンサ素子インピーダンスと目標センサ素子インピーダンスとの偏差、その積分、及び、微分の3つの要素に対し、比例ゲイン、積分ゲイン、微分ゲインを調整してフィードバック制御を行う、いわゆるPID制御がある。
【0177】
ここで図21のタイムチャートを参照しながら、この発明の実施の形態7における排出ガスセンサのヒータ制御装置112について説明する。
図21(A)は、制御装置107の自動停止/自動始動装置111による内燃機関101の自動停止の期間、及び、自動停止/自動始動のタイミングを示し、図21(B)は、制御装置107の空燃比制御装置110による空燃比フィードバック制御の開始/終了タイミングを示す。
【0178】
内燃機関101の運転中である第一制御期間301では、図21(D)に示すように、
排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段によって計測された実インピーダンス2104(Z_REAL)が、内燃機関の運転中のセンサ素子目標温度308(例えば、排出ガスセンサが活性状態となる排出ガスセンサのセンサ素子温度)に相関する第1の目標インピーダンス2101(Z_T1)となるような目標ヒータ印加実効電圧を設定する。
【0179】
次に、内燃機関101の自動停止開始後である第二制御期間302では、この期間の消費電力を低減するため、図21(D)に示すように、第1の目標インピーダンス以上の第2の目標センサ素子インピーダンス2102(Z_T2)となるような目標ヒータ印加実効電圧を設定する。
この第二制御期間中に、センサ素子温度の低下に連動し、センサ素子温度と相関するセンサ素子インピーダンスが、図21(D)に示すように上昇していく。
【0180】
次に、図21(D)に示すように、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)に到達後、内燃機関101の自動始動まで、実インピーダンス2104(Z_REAL)が、第3の目標インピーダンス2103(Z_T3)となるような目標ヒータ印加実効電圧を設定する。
【0181】
ここで、第3の目標センサ素子インピーダンスZ_T3は、上記段落[0040]で示される方法で、内燃機関の自動停止中のセンサ素子目標温度310に相関する目標インピーダンスに設定される。
【0182】
次に、内燃機関101の自動始動開始後である第四制御期間304では、図21(D)に示すように、実インピーダンス2104(Z_REAL)が第1の目標インピーダンス2101(Z_T1)に到達するまで、図21(C)に示すように、第4の目標印加実効電圧(例えば、許容最大印加実効電圧14V)を設定し、実インピーダンス2104(Z_REAL)を速やかに第1の目標インピーダンス2101(Z_T1)に到達させる。
なお、電源としてのバッテリを内燃機関の始動装置と共有するようなシステムにおいては、始動中のバッテリ電圧の低下などの制約を受けるため、その瞬間のバッテリ電圧値が最大印加実効電圧となる。
【0183】
次に、実インピーダンス2104(Z_REAL)が第1の目標インピーダンス2101(Z_T1)に到達後、第一制御期間301へと移行し、実インピーダンス2104(Z_REAL)が、第1の目標インピーダンス2101(Z_T1)となるような目標ヒータ印加実効電圧を設定する。
【0184】
次に、図22のフローチャートを用いて、この発明の実施の形態7における特徴的な制御
、即ち、内燃機関101の自動停止中、及び、自動始動後における目標ヒータ印加実効電圧の設定方法に関して、制御装置107での処理を説明する。
【0185】
まず、ステップS401において、キーオン等により制御装置107の初期化条件が成立したとき、ステップS402で、キーオンからキーオフまでの間の内燃機関101の自動停止/自動始動回数C_IS、自動停止開始からの経過時間T_IS_ON、及び、自動始動開始からの経過時間T_IS_OF、に0を格納し、初期化を行う。
【0186】
次にステップS403で、被水による素子割れ条件が成立した場合、ステップS2201で、排出ガスセンサの目標センサ素子インピーダンスZ_Tに、被水時の目標センサ素子インピーダンスZ_TWを格納し、ステップS2214に進む。
ここで、被水時の目標センサ素子インピーダンスZ_TWとして、被水しても素子割れを起こさないセンサ素子の余熱温度に相関するセンサ素子インピーダンスが設定される。
【0187】
ステップS403で、被水による素子割れ条件が不成立の場合、ステップS405で、内燃機関101の自動停止開始時であるかを判定する。ステップS405で自動停止開始時と判定された場合、ステップS406で、自動停止/自動始動回数C_ISの前回値に1を加算し、自動停止/自動始動回数C_ISに格納し、また、ステップS407で、自動始動開始からの経過時間T_IS_OFに0を格納することでT_IS_OFをリセットし、また、ステップS2202で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fに0を格納することでF_T2Fをリセットし、ステップS408へ進む。
一方、ステップS405で自動停止開始時と判定されなかった場合、ステップS408へ進む。
ここで、自動停止開始時とは、図21において、第一制御期間301から第二制御期間302に移行したタイミングである。
【0188】
次に、ステップS408で、自動停止/自動始動回数C_ISが1未満の場合、即ち、キーオン後、一度も内燃機関101の自動停止が行われていない場合、ステップS2203で、排出ガスセンサの目標センサ素子インピーダンスZ_Tに、第1の目標センサ素子インピーダンスZ_T1を格納し、ステップS2214に進む。
ここで、第1の目標センサ素子インピーダンスZ_T1には、内燃機関の運転中のセンサ素子目標温度308(例えば、排出ガスセンサが活性状態となる排出ガスセンサのセンサ素子温度)に相関するセンサ素子インピーダンスが設定される。
一方、ステップS408で、自動停止/自動始動回数C_ISが1以上の場合、即ち、キーオン後、1回以上、内燃機関101の自動停止が行われた場合、ステップS410へ進む。
【0189】
次に、ステップS410で、内燃機関101の自動停止中と判定されたとき、ステップS411で、自動停止開始からの経過時間T_IS_ONの前回値に演算処理周期を加算し、経過時間T_IS_ONに格納の上、ステップS2204に進む。
【0190】
次に、ステップS2204で、インピーダンス計測手段で計測した実インピーダンスZ_REALが、第3の目標センサ素子インピーダンスZ_T3以上であるとき、ステップS2205で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fに1を格納し、ステップS2206へ進む。一方、ステップS2204で、インピーダンス計測手段で計測した実インピーダンスZ_REALが、第3の目標センサ素子インピーダンスZ_T3未満であるとき、ステップS2206へ進む。
【0191】
次に、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0の場合、ステップS2207で、排出ガスセンサの目標センサ素子インピーダンスZ_Tに、第2の目標センサ素子インピーダンスZ_T2を格納し、ステップS2214に進む。一方、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0でない場合、ステップS2208で、排出ガスセンサの目標センサ素子インピーダンスZ_Tに、第3の目標センサ素子インピーダンスZ_T3を格納し、ステップS2214に進む。
ここで、第2の目標センサ素子インピーダンスZ_T2には、この間の消費電力を低減するため、第1の目標インピーダンス以上の目標インピーダンスが設定される。
また、ここで、第3の目標センサ素子インピーダンスZ_T3は、上記段落[0040]で示される方法で、内燃機関の自動停止中のセンサ素子目標温度310に相関する目標インピーダンスに設定される。
【0192】
ステップS410で、内燃機関101の自動停止中と判定されなかったとき、ステップ
S415に進み、ステップS415で内燃機関の自動始動開始時と判定された場合、ステップS416で、自動停止開始からの経過時間T_IS_ONに0を格納することでT_IS_ONをリセットし、また、ステップS2209で、第四制御期間が終了したことを示す第四制御期間終了フラグF_T4Fに0を格納することでF_T4Fをリセットし、ステップS417へ進む。一方、ステップS415で自動始動開始時と判定されなかった場合、ステップS417へ進む。
ステップS417で、自動始動開始からの経過時間T_IS_OFの前回値に演算処理周期を加算し、経過時間T_IS_OFに格納の上、ステップS418に進む。
ここで、自動始動開始時とは、図21において、第三制御期間303から第四制御期間304に移行したタイミングである。
【0193】
次に、ステップS2210で、インピーダンス計測手段で計測した実インピーダンスZ_REALが、第1の目標センサ素子インピーダンスZ_T1以下であるとき、ステップS2211で、第四制御期間が終了したことを示す第四制御期間終了フラグF_T4Fに1を格納し、ステップS2212へ進む。一方、ステップS2210で、インピーダンス計測手段で計測した実インピーダンスZ_REALが、第1の目標センサ素子インピーダンスZ_T1より大きいとき、ステップS2212へ進む。
【0194】
次に、ステップS2212で、第四制御期間が終了したことを示す第四制御期間終了フラグF_T4Fが0の場合、ステップS419で、ヒータ202への目標ヒータ印加実効電圧V_Tに、第4の目標印加実効電圧V_T4(例えば、許容最大印加実効電圧14V)を格納し、ステップS421に進む。一方、ステップS2212で、第四制御期間が終了したことを示す第四制御期間終了フラグF_T4Fが0でない場合、ステップS2213で、排出ガスセンサの目標センサ素子インピーダンスZ_Tに、第1の目標センサ素子インピーダンスZ_T1格納し、ステップS2214に進む。
【0195】
次に、ステップS2214で、排出ガスセンサの目標センサ素子インピーダンスZ_Tとなるよう排出ガスセンサの目標ヒータ印加実効電圧V_Tを設定する。
【0196】
次に、ステップS421で、ヒータ202への印加実行電圧を、目標ヒータ印加実効電圧V_Tとなるように制御して、図22における処理を終了する。
【0197】
以上のように、この発明の実施の形態7における排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段と、インピーダンス計測手段によって計測されたセンサ素子インピーダンスが、目標インピーダンスとなるようヒータへの印加実効電圧を設定する印加実効電圧設定手段を備え、印加実効電圧設定手段は、第一制御期間において、センサ素子インピーダンスが、内燃機関の運転中のセンサ素子目標温度に相関する第1の目標インピーダンスになるよう、第1の目標印加実効電圧を設定し、内燃機関の自動停止開始後、第二制御期間において、センサ素子インピーダンスが、第1の目標インピーダンスより高い第2の目標インピーダンスになるよう、第2の目標印加実効電圧を設定し、第二制御期間終了判定手段により、第二制御期間の終了判定後、第三制御期間において、センサ素子インピーダンスが、第2の目標インピーダンスより低く、内燃機関の自動停止中のセンサ素子目標温度に相関する第3の目標インピーダンスになるよう、第3の目標印加実効電圧を設定するよう構成している。
【0198】
また、この発明の実施の形態7における第二制御期間終了判定手段は、内燃機関の自動停止開始後、第二制御期間において、センサ素子インピーダンスが、第3の目標インピーダンスに到達した際に、第二制御期間の終了を判定する。
【0199】
また、この発明の実施の形態7における排出ガスセンサのヒータ制御装置は、排出ガスセンサの検出値に応じ、内燃機関への燃料噴射量を補正する燃料噴射量補正手段と、内燃機関の自動始動後、目標ヒータ印加実効電圧を、内燃機関の運転中のセンサ素子目標温度になるまで、第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、第四制御期間は、内燃機関の自動始動後、燃料噴射量補正手段が開始するまでに終了するよう設定され、第二制御期間、第三制御期間、第四制御期間におけるヒータ消費電力量の合計が最小となるよう設定される。
【0200】
以上述べた実施の形態7のように構成することで、実施の形態1と同様に、内燃機関の自動停止中から自動始動後にかけてのヒータ消費電力量を従来技術に比べ低減することができる。また、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にできるため、排出ガスを悪化させることがない。
【0201】
また、実施の形態7によれば、インピーダンス計測手段により計測されるセンサ素子インピーダンスがセンサ素子温度と相関のある目標インピーダンスになるよう、第1、第2、第3の目標印加実効電圧を決めることができ、適合試験などにより予め、第1、第2、第3の目標印加実効電圧を決める場合に比べ、排出ガスセンサ周辺環境に影響されず、排出ガスセンサの活性温度や自動停止中の保温温度をより正確に維持することができ、さらに消費電力量の低減が可能となる。
【0202】
実施の形態8.
次に、この発明の実施の形態8における排出ガスセンサのヒータ制御装置について説明する。本実施の形態8では、実施の形態7に対し、第2の目標印加実効電圧を、排出ガスセンサのセンサ素子インピーダンスを基に設定せず、0V、即ち、ヒータ停止とするものである。
【0203】
実施の形態8は、実施の形態7に対し、以下の点が異なるものである。
即ち、図23は、実施の形態8の特徴的な制御を説明するフローチャートで、実施の形態7の図22に対して、図23にはステップS2301が変更されている。
以下、図23における図22からの変更点に関し説明する。
【0204】
図23において、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0の場合、ステップS2301で、ヒータ202への目標ヒータ印加実効電圧V_Tに、第2の目標印加実効電圧として、0Vを格納し、ステップS421に進む。一方、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0でない場合、ステップS2208で、排出ガスセンサの目標センサ素子インピーダンスZ_Tに、第3の目標センサ素子インピーダンスZ_T3を格納し、ステップS2214に進む。
ステップS2206、S2301、S2208の上流、及び、下流のフローは実施の形態7における図22と同じである。
【0205】
以上のように、この発明の実施の形態8における排出ガスセンサのヒータ制御装置は、実施の形態1の発明に対し、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段と、インピーダンス計測手段によって計測されたセンサ素子インピーダンスが、目標インピーダンスとなるようヒータへの印加実効電圧を設定する印加実効電圧設定手段を備え、第一制御期間において、センサ素子インピーダンスが、内燃機関の運転中のセンサ素子目標温度に相関する第1の目標インピーダンスになるよう、印加実効電圧設定手段により、第1の目標印加実効電圧が設定され、内燃機関の自動停止開始後、第二制御期間において、第1の目標印加実効電圧より低い第2の目標印加実効電圧、もしくは、0V(即ち、ヒータを停止)が設定され、第二制御期間中に、センサ素子インピーダンスが、第1の目標インピーダンスより高く、内燃機関の自動停止中のセンサ素子目標温度に相関する第3の目標インピーダンスに到達後、第三制御期間において、第3の目標インピーダンスを保持するよう、印加実効電圧設定手段により、第3の目標印加実効電圧が設定されるよう構成している。
【0206】
従って、実施の形態8のように構成することで、第二制御期間における消費電力量を0にすることができ、実施の形態7の発明に対し、さらに消費電力量を低減することができる。
【0207】
実施の形態9.
次に、この発明の実施の形態9における排出ガスセンサのヒータ制御装置について説明する。本実施の形態9では、実施の形態8に対し、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合について示し、実施の形態3とは、インピーダンス計測手段を備える点で構成が異なる。
【0208】
実施の形態9は、実施の形態8に対し、以下の点が異なるものである。
即ち、図24は、実施の形態9の特徴的な制御を説明するフローチャートで、実施の形態8の図23に対して、図24にはステップS2401〜S2406が追加され、ステップS2407が変更されている。
以下、図24における図23からの変更点に関し説明する。
【0209】
図24において、ステップS405で自動停止開始時と判定された場合、ステップS406で、自動停止/自動始動回数C_ISの前回値に1を加算し、自動停止/自動始動回数C_ISに格納し、ステップS407で、自動始動開始からの経過時間T_IS_OFに0を格納することでT_IS_OFをリセットし、また、ステップS2202で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fに0を格納することでF_T2Fをリセットし、ステップ、S2401で、自動停止開始時センサ周辺温度ET_Sに、内燃機関の自動停止開始時の排出ガスセンサの周辺温度ETを格納し、ステップS408へ進む。
一方、ステップS405で自動停止開始時と判定されなかった場合、ステップS408へ進む。
【0210】
次に、ステップS408からステップS2205までは、図23と同じ処理を行い、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0の場合、ステップS2301で、ヒータ202への目標ヒータ印加実効電圧V_Tに、第2の目標印加実効電圧として、0Vを格納し、ステップS421に進む。
一方、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0でない場合、ステップS2402へ進み、自動停止開始時センサ周辺温度ET_Sが、排出ガスセンサの周辺温度の基準値ET_NRMにばらつき許容量ET_Zを加算した値より大きいかを判定する。ステップS2402で、大きいと判定された場合は、ステップS2403で、センサ周辺温度が高いほど補正係数K_Aが大きくなるよう、例えば、下式(16)により、補正係数K_Aを演算し、ステップS2407へ進む。
【0211】
K_A=ET_G1×(1+(ET_S−(ET_NRM+ET_Z))÷ET_NRM) ・・・式(16)
ここで、ET_G1は、自動停止開始時センサ周辺温度ET_Sが、基準値ET_NRMより大きい場合のゲインである。
【0212】
次に、ステップS2402で大きくないと判定された場合は、ステップS2404で、自動停止開始時センサ周辺温度ET_Sが、排出ガスセンサの周辺温度の基準値ET_N
RMにばらつき許容量ET_Zを減算した値より小さいかを判定する。
ステップS2404で、小さいと判定された場合は、ステップS2405で、センサ周辺温度が低いほど補正係数K_Aが小さくなるよう、例えば、下式(17)により、補正係数K_Aを演算し、ステップS2407へ進む。
【0213】
K_A=ET_G2×(1+(ET_S−(ET_NRM+ET_Z))÷ET_NRM) ・・・式(17)
ここで、ET_G2は、自動停止開始時センサ周辺温度ET_Sが、基準値ET_NRMより小さい場合のゲインである。
【0214】
次に、ステップS2404で小さくないと判定された場合は、ステップS2406で、
補正係数K_Aに1を格納することで、排出ガスセンサの周辺温度にばらつきがある場合の補正を無効化し、ステップS2407へ進む。
補正係数K_Aの演算が完了すると、ステップS2407で、第3の目標インピーダンスに補正係数K_Aを乗算する。
【0215】
ここで、基準値ET_NRMとは、所定の環境下で予め定義した排出ガスセンサの周辺温度の基準値であり、センサ周辺温度が変動する前の基準値である。
なお、所定の環境下とは、例えば、内燃機関101から排出される排出ガスの温度、排出ガスセンサの取り付け位置周辺の排気管壁面温度、触媒104の温度、外気温、などが、それぞれ所定の温度の状態であることを指す。
【0216】
ここで、ばらつき許容量ET_Zとは、センサ周辺温度ETが基準値ET_NRMと異なったとしても、センサ素子温度への影響が小さく許容できる量を基準値からの差分で定義し、予め適合などにより設定する量である。
【0217】
なお、本実施の形態9では、ステップS2407で、自動停止開始時センサ周辺温度ET_Sと基準値ET_NRM±ばらつき許容量ET_Zとの差分に応じ、第3の目標インピーダンスに補正係数K_Aを乗算するような構成にしているが、自動停止開始時センサ周辺温度ET_Sと基準値ET_NRM±ばらつき許容量ET_Zとの差分に応じ、第3の目標インピーダンスに補正係数を加減算するような構成にしても同様の効果が得れる。
【0218】
ここで、図25、図26を用いて、排出ガスセンサの周辺温度が基準温度と異なる場合
、即ち、排出ガスセンサの周辺温度にばらつきがある場合に対し、実施の形態9により解決する課題とその効果を説明する。
【0219】
まず、図25を用いて、実施の形態9の補正、即ち、第3の目標インピーダンスを、センサ周辺温度が低いほど低く、高いほど高くする補正を実施しなかった場合の課題について説明する。
図25(F)において、第二制御期間302の直前、即ち、内燃機関101の自動停止開始直前のセンサ周辺温度は、自動停止開始直前の運転状態、内燃機関101から排出される排出ガスの温度、排出ガスセンサの取り付け位置周辺の排気管壁面温度、触媒104の温度、外気温、等に依存し、例えば、自動停止直前に、車両のアイドル状態、かつ、外気温が低いような場合、排気温度が低いため、センサ周辺温度も低い状態で自動停止が開始され、また、低い外気温により外部から排気管等を通じ冷やされ、センサ周辺温度は、基準となる基準値の挙動1101に対し、1102のように低くなる。一方、例えば、自動停止直前に、排気温度が高くなるような内燃機関の高負荷運転をしていた場合、排気温度が高いため、センサ周辺温度も高い状態で自動停止が開始され、センサ周辺温度は、基準となる基準値の挙動1101に対し、1103のように高くなる。
【0220】
ここで、実施の形態9の補正を実施しなかった場合、センサ素子温度は、センサ周辺温度の影響を受け、図25(E)のように、センサ周辺温度が低い1102の場合、センサ素子温度は2502のように低くなり、センサ周辺温度が高い1103の場合、センサ素子温度は2503のように高くなる。ここで、この影響が問題となるのは、内燃機関の自動停止後である第二制御期間302と、内燃機関の自動始動後である第四制御期間304である。即ち、第二制御期間302においては、第2の目標印加実効電圧を0Vに固定して温度を降温させているため、センサ周辺温度の違いによりセンサ素子温度の降温速度が変わり、また、第四制御期間304においては、目標印加実効電圧を許容最大印加実効電圧14Vに固定して温度を昇温させているため、センサ周辺温度の違いによりセンサ素子温度の昇温速度が変わる。
【0221】
特に、センサ周辺温度が低い1102の場合、第二制御期間においては、図25(E)の2502に示すとおり、センサ素子温度の降温速度が早くなり、第三制御期間へ早く移行することにより第三制御期間が長くなり、第三制御期間における消費電力量が大きくなる。また、センサ周辺温度が低いため、第3の目標インピーダンスを維持するための、即ち、内燃機関の自動停止中のセンサ素子目標温度310に保持するための目標印加実効電圧高くなり、第三制御期間における消費電力量が大きくなる。一方、第四制御期間においては、センサ素子温度の昇温速度が遅くなることで、第四制御期間長くなり、第四制御期間における消費電力量が大きくなる。また、第四制御期間が長くなることで、空燃比フィードバック制御開始までに排出ガスセンサのセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できない恐れもある。
【0222】
次に、図26を用いて、実施の形態9の補正を実施した場合の効果について説明する。
まず、センサ周辺温度が基準のセンサ周辺温度1101より低い1102で示されるセンサ周辺温度の場合、自動停止開始時センサ周辺温度ET_Sと基準値ET_NRM−ばらつき許容量ET_Zとの差分に応じ、図26(D)の2605のように、第3の目標インピーダンスZ_T3は、基準の目標インピーダンス2604に比べ、低く補正される。これにより、図26(E)の2602のように第三制御期間中のセンサ素子温度は、内燃機関の自動停止中のセンサ素子目標温度310に保持する基準のセンサ素子温度2601に比べ高くなることで、第四制御期間におけるセンサ素子温度2602は、基準のセンサ素子温度2601の第四制御期間における挙動に近くなる。このため、空燃比フィードバック制御開始までにセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できるようになる。
【0223】
次に、センサ周辺温度が基準のセンサ周辺温度1101より高い1103で示されるセンサ周辺温度の場合、自動停止開始時センサ周辺温度ET_Sと基準値ET_NRM+ばらつき許容量ET_Zとの差分に応じ、図26(D)の2606のように、第3の目標インピーダンスZ_T3は、基準の目標インピーダンス2604に比べ、高く補正される。これにより、図26(E)の2603のように第三制御期間中のセンサ素子温度は、内燃機関の自動停止中のセンサ素子目標温度310に保持される基準のセンサ素子温度2601に比べ低くなることで、第四制御期間におけるセンサ素子温度2603は、基準のセンサ素子温度2601の第四制御期間における挙動に近くなる。このため、第三制御期間を短くできるとともに、第三制御期間中に第3の目標印加実効電圧を下げれることによる消費電力量の低減効果を得れる。
【0224】
以上のように、この発明の実施の形態9における排出ガスセンサのヒータ制御装置は、実施の形態8の発明に対し、排出ガスセンサの周辺温度を推定するセンサ周辺温度推定手段を備え、第3の目標インピーダンスは、センサ周辺温度推定手段によって推定されるセンサ周辺温度に応じて補正されるように構成している。
【0225】
実施の形態9のように構成することで、実施の形態8の発明に対し、排出ガスセンサの周辺温度が基準温度と異なる場合、即ち、排出ガスセンサの周辺温度にばらつきがある場合において、第3の目標インピーダンスを、センサ周辺温度が低いほど低く、高いほど高くする補正することで、空燃比フィードバック制御開始までに排出ガスセンサを活性状態にでき、排出ガスの悪化を防止する上、ヒータの消費電力量を低減できる。
【0226】
実施の形態10.
次に、この発明の実施の形態10における排出ガスセンサのヒータ制御装置について説明する。本実施の形態10では、実施の形態8に対し、さらに消費電力を低減する方法を示す。
【0227】
実施の形態10は、実施の形態8に対し、以下の点が異なるものである。
即ち、図27は、実施の形態10の特徴的な制御を説明するフローチャートで、実施の形態8の図23に対して、図27にはステップS2702、S2703が追加され、ステップS2701、S2704が変更されている。
以下、図27における図23からの変更点に関し説明する。
【0228】
図27において、ステップS410で、内燃機関101の自動停止中と判定されたとき
、ステップS411で、自動停止開始からの経過時間T_IS_ONの前回値に演算処理周期を加算し、経過時間T_IS_ONに格納の上、ステップS2701に進む。
【0229】
次に、ステップS2701で、インピーダンス計測手段で計測した実インピーダンスZ_REALが、第3の目標センサ素子インピーダンスZ_T3A以上であるとき、ステップS2702で、第二制御期間中の経過時間T1Aに、自動停止開始からの経過時間T_IS_ONを格納し、ステップS2205で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fに1を格納し、ステップS2206へ進む。一方、ステップS2701で、インピーダンス計測手段で計測した実インピーダンスZ_REALが、第3の目標センサ素子インピーダンスZ_T3A未満であるとき、ステップS2206へ進む。
【0230】
次に、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0の場合、ステップS2301で、ヒータ202への目標ヒータ印加実効電圧V_Tに、第2の目標印加実効電圧として、0Vを格納し、ステップS421に進む。一方、ステップS2206で、第二制御期間が終了したことを示す第二制御期間終了フラグF_T2Fが0でないとき、即ち、第三制御期間であるとき、ステップS2703へ進み、下式(18)で示される内燃機関の自動停止開始からの経過時間が長くなるほど小さくなるような補正係数K_Z3を演算し、ステップS2704に進む。
【0231】
K_Z3=ISZ_G×(T_IS_ON−T1A)÷(T_IS_ON_MAX−T1A)+ISZ_OFST ・・・式(18)
【0232】
ステップS2704では、第3の目標センサ素子インピーダンスZ_T3Aに補正係数K_Z3乗算したものと、第3の目標センサ素子インピーダンスZ_T3の下限値Z_T3MINと比較し、大きい方を排出ガスセンサの目標センサ素子インピーダンスZ_Tに格納し、ステップS2214に進む。
【0233】
ここで、ゲインISZ_Gは、負の値とし、式(18)による補正値K_Z3が、内燃機関の自動停止開始からの経過時間が長くなるほど、小さくなるようにする。また、オフセット量ISZ_OFSTは、−1以上0以下の値とし、第3の目標センサ素子インピーダンスZ_T3Aに対し、どの程度オフセットさせるかを調整する。
【0234】
ここで、第3の目標センサ素子インピーダンスZ_T3の下限値Z_T3MINは、例えば、排出ガスセンサのセンサ素子の活性温度に相当するセンサ素子インピーダンスである第1の目標インピーダンス(Z_T1)、もしくは、それ以上の値に設定される。
【0235】
なお、第3の目標センサ素子インピーダンスZ_T3Aに補正係数K_Z3乗算したものと、第3の目標センサ素子インピーダンスZ_T3の下限値Z_T3MINと比較し、大きい方を目標センサ素子インピーダンスZ_Tに格納することで下限クリップを設けたが、下限値Z_T3MINと比較し大きい方を選択することをせず、第三制御期間開始から所定時間経過した時点で、その時点の目標センサ素子インピーダンスZ_T(=Z_T3A×K_Z3)でクリップする方法でもよい。
【0236】
さて、ステップS410で、内燃機関101の自動停止中と判定されなかったとき、ステップS415へと進み、以下、実施の形態8の図23と同じ処理となる。
【0237】
ここで、図28のタイムチャートを参照しながら、実施の形態10により解決する課題とその効果を説明する。
【0238】
まず、実施の形態10の補正を実施しなかった場合の課題について説明する。
内燃機関の自動停止開始後、運転者の車両発進意図があったとき(例えば、アクセルペダルやクラッチペダルの踏み込み、ブレーキペダルの解除、など)に自動始動するような自動停止/自動始動装置においては、いつ、自動停止が解除され自動始動されるかを、制御装置107は予め分からない。このため、実施の形態8では、第3の目標インピーダンスを、上記段落[0040]で示したような方法で、内燃機関の自動停止中のセンサ素子目標温度310に相関する目標インピーダンスに、固定値として設定し、どのタイミングで自動始動されても、空燃比フィードバック制御実施より前にセンサ素子温度が内燃機関の運転中のセンサ素子目標温度308に到達できるように設定されている。
しかしながら、図28(F)のセンサ周辺温度2807に示すように、第三制御期間の前部では、第三制御期間の後部に比べ、センサ周辺温度が高い。このため、この第三制御期間の前部で自動始動があった場合、第三制御期間の後部で自動始動があった場合に比べ、自動始動後に、排出ガスセンサのセンサ素子温度が、内燃機関の運転中のセンサ素子目標温度308に到達する時間は短くなる。従って、第三制御期間の前部の第3の目標インピーダンスを、第三制御期間の後部の第3の目標インピーダンスに比べ、高く補正すれば、さらに消費電力を低減できる。
【0239】
また、電源としてのバッテリを内燃機関の始動装置と共有するようなシステムにおいては、始動中に始動装置が電力を必要とするため、始動中にバッテリ電圧の低下があり、図28(C)の2810に示すように、自動始動直後の第四制御期間に許容最大印加実効電圧(14V)をヒータへ印加することができない。このため、図28(E)の2805に示すように、自動始動直後の第四制御期間におけるセンサ素子温度の昇温速度が遅くなり
、空燃比フィードバック制御開始に遅れる可能性がある。又は、空燃比フィードバック制御開始タイミングに遅れないよう第3の目標インピーダンスを設定した場合、第四制御期間に常時、許容最大印加実効電圧(14V)を印加した場合に比べ、第3の目標インピーダンスを低く、即ち、内燃機関の自動停止中のセンサ素子目標温度を高く設定することとなり、消費電力量の増加を招く。
【0240】
次に、実施の形態10の補正を実施した場合の効果について説明する。
即ち、図28(D)の2802のように、第三制御期間の目標インピーダンスを第三制御期間の後部に比べ、第三制御期間の前部を高く補正することで、図28(G)の2807のように前部の消費電力量を低減することができ、この間に内燃機関の自動始動があった場合に、実施の形態8に比べ、消費電力量を低減することができる。
【0241】
また、図28(D)の2802のように、第三制御期間の後部の目標インピーダンスを第3の目標インピーダンス2103より低く補正することで、図28(C)の2804のように、第四制御期間の昇温のための印加実効電圧を低くすることができ、図28(G)の2809のように消費電力量を低減することができ、また、始動中におけるバッテリ電圧低下の影響を受けない。
【0242】
ここで、図28(G)の2808のように、第三制御期間の後部において消費電力量増加分があるが、2808と2809の差し引きの消費電力量が小さくなるように予め適合などにより、式(18)のゲインISZ_Gと、オフセット量ISZ_OFSTを設定する。
【0243】
つまり、最大自動停止時間T_IS_ON_MAXに対し、自動停止開始からの経過時間が長くなるにつれ、即ち、最大自動停止時間T_IS_ON_MAXに近づくにつれ、自動始動する可能性が高くなり、自動停止中の保温温度を上げておくことで、自動始動後の昇温のための消費電力を抑えることができ、また、自動始動直後の第四制御期間において、許容最大印加実効電圧(14V)以下の印加実効電圧でも空燃比フィードバック制御開始までにセンサ素子温度を昇温させることができ、始動中におけるバッテリ電圧の低下の影響を受けない。
【0244】
以上のように、この発明の実施の形態10における排出ガスセンサのヒータ制御装置は
、実施の形態8の発明に対し、第3の目標インピーダンスは、自動停止経過時間計測手段によって計測される自動停止開始からの経過時間が長いほど低く補正されるように構成されている。
【0245】
従って、実施の形態10によれば、実施の形態8に比べ、さらに消費電力を低減することができ、また、始動中におけるバッテリ電圧の低下の影響を受けることなく、空燃比フィードバック制御開始までにセンサ素子温度を昇温させることができる。
【0246】
実施の形態11.
次に、この発明の実施の形態11における排出ガスセンサのヒータ制御装置について説明する。
実施の形態11は、実施の形態7〜10に対し、センサ素子特性のばらつきや劣化による特性変化などにより、センサ素子温度とセンサ素子インピーダンスの関係が変化した場合においても、内燃機関の自動停止中におけるヒータ消費電力を低減し、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達遅延を防止し、空燃比フィードバック制御の開始タイミングが遅れず燃費や排出ガスの悪化を防止できるようにするものである。
【0247】
まず、図29のタイムチャートを参照しながら、この発明の実施の形態11に係る排出ガスセンサのヒータ制御装置112について説明する。
図29(A)は、制御装置107の自動停止/自動始動装置111による内燃機関101の自動停止の期間、及び、自動停止/自動始動のタイミングを示し、図29(B)は、制御装置107の空燃比制御装置110による空燃比フィードバック制御の開始/終了タイミングを示す。
【0248】
次に、内燃機関101の運転中である第一制御期間301では、図29(D)に示すように、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段によって計測された実インピーダンス2104(Z_REAL)が、内燃機関の運転中のセンサ素子目標温度308(例えば、排出ガスセンサが活性状態となる排出ガスセンサのセンサ素子温度)に相関する第1の目標インピーダンス2101(Z_T1)となるような目標ヒータ印加実効電圧を設定する。
【0249】
次に、内燃機関101の自動停止開始後である第二制御期間302では、図29(C)に示すように、ヒータへの印加実効電圧を0V(ヒータ停止)とすることで、センサ素子温度を下げ、実インピーダンス2104(Z_REAL)を内燃機関101の自動停止中のセンサ素子目標温度310に相関する第3の目標インピーダンス2103(Z_T3)に到達させる。
なお、制二制御期間302におけるヒータ停止期間は、実インピーダンス2104(Z_REAL)の第3の目標インピーダンス2103(Z_T3)へのフィードバック制御(例えば、PID制御)による操作量が、ヒータへの印加実効電圧の下限値0Vに制限されている期間でもよい。
【0250】
次に、図29(D)に示すように、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)に到達後、内燃機関101の自動始動まで、実インピーダンス2104(Z_REAL)が、第3の目標インピーダンス2103(Z_T3)となるような目標ヒータ印加実効電圧を設定する。
【0251】
次に、内燃機関101の自動始動開始後である第四制御期間304では、図29(D)に示すように、実インピーダンス2104(Z_REAL)が第1の目標インピーダンス2101(Z_T1)に到達するまで、図29(C)に示すように、第4の目標印加実効電圧(例えば、許容最大印加実効電圧14V)を設定し、実インピーダンス2104(Z_REAL)を速やかに第1の目標インピーダンス2101(Z_T1)に到達させる。
なお、電源としてのバッテリを内燃機関の始動装置と共有するようなシステムにおいては、始動中のバッテリ電圧の低下などの制約を受けるため、その瞬間のバッテリ電圧値が最大印加実効電圧となる。
【0252】
次に、実インピーダンス2104(Z_REAL)が第1の目標インピーダンス2101(Z_T1)に到達後、第一制御期間301へと移行し、実インピーダンス2104(Z_REAL)が、第1の目標インピーダンス2101(Z_T1)となるような目標ヒータ印加実効電圧を設定する。
【0253】
ここで、第1の目標インピーダンス2101(Z_T1)は、内燃機関101の運転中のセンサ素子目標温度308に相当するインピーダンスに設定される。
【0254】
また、第3の目標インピーダンス2103(Z_T3)は、例えば、内燃機関101の自動始動後、空燃比フィードバック制御のための空燃比検出要求開始時までに、第四制御期間における第4の目標印加実効電圧の印加により、第1の目標インピーダンス2101(Z_T1)に到達させ、かつ、第二制御期間302、第三制御期間303、第四制御期間304におけるヒータの消費電力量の合計311(図29(F)参照)が最小となるような、内燃機関101の自動停止中のセンサ素子目標温度310に相当するインピーダンスに予め適合試験などによって設定される。
なお、第三制御期間303における内燃機関101の自動停止中のセンサ素子目標温度310を低く設定するほど、第四制御期間304に昇温しなければならない温度幅が大きくなり、内燃機関101の運転中のセンサ素子目標温度308に到達するまでの時間が長くなると共に、第四制御期間304における消費電力量が大きくなるが、第三制御期間における消費電力量が小さくなる。
一方、第三制御期間303における内燃機関101の自動停止中のセンサ素子目標温度
310を高く設定するほど、第四制御期間304に昇温しなければならない温度幅が小さくなり、内燃機関101の運転中のセンサ素子目標温度308に到達するまでの時間が短くなると共に、第四制御期間304における消費電力量が小さくなるが、第三制御期間における消費電力量が大きくなる。
【0255】
次に、図30(a)は、センサ素子温度に対するセンサ素子インピーダンスの特性図を示す。
図30(a)に示すように、センサ素子インピーダンスのばらつき、又は、劣化により、同一インピーダンスにおいてもセンサ素子の実温度は異なる。
即ち、センサ素子インピーダンスが第1の目標インピーダンス2101と一致していたとしても、センサ素子の実温度は、ばらつき範囲3005のばらつきを有し、また、センサ素子インピーダンスが第3の目標インピーダンス2103と一致していたとしてもセンサ素子の実温度は、ばらつき範囲3006のばらつきを有す。例えば、インピーダンス初期下限品3001はインピーダンス劣化品3004に比べ実温度が低いことが分かる。
【0256】
図30(b)は、図29の第二制御期間302において、第1の目標インピーダンス2101(Z_T1)に制御している状態からヒータへの印加実効電圧を0V(ヒータ停止)とした後のセンサ素子インピーダンスの上昇を、経過時間に対して示した図である。
また、図30(c)は、図30(b)における経過時間に対し、センサ素子の実温度の変化を示した図である。
【0257】
センサ素子の実温度の変化は、図30(c)のセンサ素子の実温度変化3007のように、インピーダンス初期下限品3001、インピーダンス初期中央品3002、インピーダンス初期上限品3003、インピーダンス劣化品3004のいずれにおいても同じ(もしくは、実温度に対する、インピーダンスのセンサ素子特性のばらつきや劣化による特性変化に比べると、センサ素子の実温度の差は十分に小さい)であるが、図30(a)のようなセンサ素子特性のばらつきや劣化による特性変化により、センサ素子インピーダンスは、図30(b)に示すように、第3の目標インピーダンス2103(Z_T3)に到達するまでの時間が異なる。即ち、図30(b)によると、第1の目標インピーダンス2101(Z_T1)から第3の目標インピーダンス2103(Z_T3)に到達するまでの時間が、インピーダンス初期下限品3001で長く、インピーダンス劣化品3004で短いことが分かる。
【0258】
図31は、図30(a)、(b)と同じ特性図を用い、この発明の実施の形態11の特徴である、第3の目標インピーダンスをヒータ停止期間が短いほど高く、ヒータ停止期間が長いほど低く補正する理由を説明したものである。
図31(a)において、内燃機関の自動停止中にセンサ素子温度を実温度3101に制御するためには、インピーダンス初期中央品3002の場合、排出ガスセンサのヒータ制御装置112が計測したセンサ素子インピーダンスが、第3の目標インピーダンス2103になるようヒータへの印加実効電圧が調整される。
【0259】
しかし、例えば、インピーダンス初期下限品3001の場合、センサ素子インピーダンスが第3の目標インピーダンス2103になるようヒータへの印加実効電圧が調整されると、センサ素子の実温度は実温度3102Aとなる。そこで、インピーダンス初期下限品3001においても実温度3101に制御するためには、センサ素子インピーダンスが補正後の第3の目標インピーダンス3103Aになるようヒータへの印加実効電圧を調整すればよい。
また、例えば、インピーダンス初期上限品3003の場合、センサ素子インピーダンスが第3の目標インピーダンス2103になるようヒータへの印加実効電圧が調整されると、センサ素子の実温度は実温度3102Bとなる。そこで、インピーダンス初期上限品3003においても実温度3101に制御するためには、センサ素子インピーダンスが補正後の第3の目標インピーダンス3103Bになるようヒータへの印加実効電圧を調整すればよい。
【0260】
ここで、補正後の第3の目標インピーダンス3103A、3103Bは、図29の第二制御期間302における経過時間とセンサ素子インピーダンスの関係から決定できる。
即ち、図31(b)に示されるように、インピーダンス初期下限品3001においては、経過時間3105Aが経過時間3104と等しくなるよう第3の目標インピーダンスを下げる。
即ち、インピーダンス初期中央品3002の経過時間3104に対し、ヒータ停止期間が長いほど第3の目標インピーダンス2103を低く補正すればよい。また、インピーダンス初期上限品3003においては、経過時間3105Bが経過時間3104と等しくなるよう第3の目標インピーダンスを上げる。即ち、インピーダンス初期中央品の経過時間3104に対し、ヒータ停止期間が短いほど第3の目標インピーダンス2103を高く補正すればよい。
【0261】
次に、図32のフローチャートを用いて、本発明における特徴的な制御を説明する。
図32で示されるフローチャートのスタートからエンドは制御装置107の演算処理周期毎に毎回演算され、まず、ステップS3201において、キーオン等により制御装置107の初期化条件が成立したとき、ステップS3202で、図29(D)における第3の目標インピーダンス2103(Z_T3)に、第3の目標インピーダンス2103(Z_T3)の初期値(Z_T3INI)を格納し、ステップS3203で、図29における第二制御期間302の内、ヒータへの印加実効電圧を0V(ヒータ停止)としているヒータ停止期間(T_T2)に、ヒータ停止期間(T_T2)の初期値(T_T2INI)を格納する。
【0262】
ここで、第3の目標インピーダンス2103の初期値(Z_T3INI)は前記段落
[0254]に記載の方法で、予め適合試験などによって設定し、ヒータ停止期間の初期値(T_T2INI)は、図31におけるインピーダンス中央品3002が、第3の目標インピーダンス2103(Z_T3)に到達する時間を設定する。設定した各値は、制御装置107のROMに記憶され、前記ステップS3202、S3203で使用される。
【0263】
次に、ステップS3204において、自動停止/自動始動装置111による内燃機関101の自動停止開始時と判定された場合、ステップS3205で、自動停止後の経過時間T_HTRSTPに初期値0を、ステップS3206で、内燃機関101の今回の自動停止中に第3の目標インピーダンス2103(Z_T3)の補正が実施済であることを示す、フラグF_DONEに初期値0を、それぞれ格納する。
【0264】
次に、ステップS3207において、自動停止/自動始動装置111による内燃機関101の自動停止中と判定された場合、以下の処理を実施する。
即ち、ステップS3208において、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)より小さいとき、ステップS3209で、自動停止後の経過時間T_HTRSTPの前回値に演算周期を加算し、ステップS3210で、排出ガスセンサのヒータを停止する。
【0265】
一方、ステップS3208において、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)以上、かつ、ステップS3211でF_DONEが0、即ち、今回の自動停止中に第3の目標インピーダンス2103(Z_T3)の補正が未実施のとき、ステップS3212で、第3の目標インピーダンス2103(Z_T3)の補正実施条件が成立しているかを判定する。
【0266】
本実施の形態11における補正を実施するためには、排出ガスセンサの周辺雰囲気がある一定の条件下である必要がある。具体的には、吸気温、外気温、自動停止前の内燃機関の負荷状態、などが予め定められた条件の範囲内のときに第3の目標インピーダンス2103(Z_T3)の補正を許可する。
【0267】
次に、ステップS3213で、自動停止後の経過時間T_HTRSTPが、ヒータ停止期間(T_T2)にヒータ停止期間(T_T2)の上側の不感帯量に相当する不感帯T_T2DZ1を加算した値以上のとき、ステップS3214で、第3の目標インピーダンス2103(Z_T3)の前回値から減算補正量Z_C1を減算した値を補正後の第3の目標インピーダンス2103(Z_T3)として、第3の目標インピーダンス2103(Z_T3)に格納し、ステップS3217でF_DONEに1を格納した上で、ステップS3218で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)を維持するよう、排出ガスセンサのヒータ制御装置112によってヒータへの印加実効電圧が設定される。
【0268】
ステップS3215で、自動停止後の経過時間T_HTRSTPが、ヒータ停止期間(T_T2)にヒータ停止期間(T_T2)の下側の不感帯量に相当する不感帯T_T2DZ2を減算した値以下のとき、ステップS3216で、第3の目標インピーダンス2103(Z_T3)の前回値から加算補正量Z_C2を加算した値を補正後の第3の目標インピーダンス2103(Z_T3)として、第3の目標インピーダンス2103(Z_T3)に格納し、ステップS3217でF_DONEに1を格納した上で、ステップS3218で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)を維持するよう、排出ガスセンサのヒータ制御装置112によってヒータへの印加実効電圧が設定される。
【0269】
自動停止後の経過時間T_HTRSTPが不感帯内にあるとき、即ち、T_T2−T_T2DZ2<T_HTRSTP<T_T2+T_T2DZ1の関係にあるとき、ステップS3217でF_DONEに1を格納した上で、ステップS3218で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)を維持するよう、排出ガスセンサのヒータ制御装置112によってヒータへの印加実効電圧が設定される。
【0270】
一方、ステップS3211でF_DONEが0でない、即ち、今回の自動停止中に第3の目標インピーダンス2103(Z_T3)の補正が実施済のとき、ステップS3218で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)を維持するよう、排出ガスセンサのヒータ制御装置112によってヒータへの印加実効電圧が設定される。
【0271】
なお、上記実施の形態11において、加算補正量Z_C1、及び、減算補正量Z_C2は、あらかじめ適合試験などによって設定された値とする。
【0272】
ここで、図33を用いて、実施の形態11による内燃機関の自動停止中のヒータ消費電力低減効果について、実際のセンサ素子温度がセンサ素子インピーダンスから推定する推定センサ素子温度より高くなる場合、即ち、インピーダンス初期中央品3002に対し、劣化によりインピーダンス劣化品3004に特性変化した場合を例に説明する。
【0273】
まず、実施の形態11による第3の目標インピーダンス2103(Z_T3)の補正を実施しない場合、図33(D)のように、機関自動停止後、第3の目標インピーダンスに到達してから機関自動始動までの間、即ち、第三制御期間303におけるインピーダンス劣化品(目標インピーダンス補正なし)3302の実インピーダンス3305と、第三制御期間303aにおけるインピーダンス初期中央品3303の実インピーダンス3306は、ヒータ制御装置112によって同じ値になるよう調整されるが、図33(E)のように、第三制御期間303におけるインピーダンス劣化品(目標インピーダンス補正なし)3302の実センサ素子温度3308は、第三制御期間303aにおけるインピーダンス初期中央品3303の実センサ素子温度3309に対し、高くなっている。このため、この高い実センサ素子温度3308を維持するようヒータ制御装置112によってヒータへの印加実効電圧が調整され、図33(F)のように、インピーダンス劣化品(目標インピーダンス補正なし)3302のヒータ消費電力は、インピーダンス初期中央品3303に対し、高くなっている。このため、インピーダンス劣化品(目標インピーダンス補正なし)3302のセンサ素子温度をインピーダンス初期中央品3303相当に下げると消費電力を低減することができる。
【0274】
そこで、実施の形態11による第3の目標インピーダンス2103(Z_T3)の補正を実施する。即ち、内燃機関の自動停止毎に、第二制御期間302が短いほど第3の目標インピーダンスを高く補正すると、最終的に、インピーダンス劣化品(目標インピーダンス補正なし)3302における第二制御期間302は第二制御期間302aに、第三制御期間303は第三制御期間303aになり、図33(D)のように、インピーダンス劣化品(目標インピーダンス補正なし)3302の実インピーダンス3305は、インピーダンス劣化品(目標インピーダンス補正後)3301の実インピーダンス3304のようになり、図33(E)のように、第三制御期間303aにおけるインピーダンス劣化品(目標インピーダンス補正後)3301の実センサ素子温度3307は、第三制御期間303aにおけるインピーダンス初期中央品3303の実センサ素子温度3309と、等しくなる。結果、図33(F)に示すように、インピーダンス劣化品(目標インピーダンス補正後)3301は、消費電力低減量3310だけ内燃機関の自動停止中のヒータ消費電力量を低減でき、インピーダンス初期中央品3303相当のヒータ消費電力にすることができる。
【0275】
次に、図34を用いて、実施の形態11による、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達遅延を防止し、空燃比フィードバック制御の開始タイミングが遅れず燃費や排出ガスの悪化を防止する効果について、実際のセンサ素子温度がセンサ素子インピーダンスから推定する推定センサ素子温度より低くなる場合、即ち、センサ素子特性のばらつきにより、センサ素子特性が、インピーダンス初期中央品3002に対し、インピーダンス初期下限品3001であった場合を例に説明する。
【0276】
まず、実施の形態11による第3の目標インピーダンス2103(Z_T3)の補正を実施しない場合、図34(D)のように、機関自動停止後、第3の目標インピーダンスに到達してから機関自動始動までの間、即ち、第三制御期間303におけるインピーダンス初期下限品(目標インピーダンス補正なし)3402の実インピーダンス3405と、第三制御期間303aにおけるインピーダンス初期中央品3403の実インピーダンス3406は、ヒータ制御装置112によって同じ値になるよう調整されるが、図34(E)のように、第三制御期間303におけるインピーダンス初期下限品(目標インピーダンス補正なし)3402の実センサ素子温度3408は、第三制御期間303aにおけるインピーダンス初期中央品3403の実センサ素子温度3409に対し、低くなっている。このため、機関自動始動後に許容最大印加実効電圧を与え実温度を昇温させたとしても、インピーダンス初期下限品(目標インピーダンス補正なし)3402の実センサ素子温度3408は、インピーダンス初期中央品3403の実センサ素子温度3409に対し、昇温が遅く、実インピーダンス値は実センサ素子温度に応じた値となるため、インピーダンス初期下限品(目標インピーダンス補正なし)3402の実インピーダンス3405は、インピーダンス初期中央品3403の実インピーダンス3406に対し、第1の目標インピーダンス2101(Z_T1)への到達が遅れる。
【0277】
空燃比フィードバック制御実施条件の一つとして、実インピーダンスからセンサ素子温度を推定し、推定したセンサ素子温度よりセンサが活性状態であると判定されている必要があるが、図34(B)のように、インピーダンス初期下限品(目標インピーダンス補正なし)3402は、インピーダンス初期中央品3403に対し、機関自動始動後、空燃比フィードバック制御実施条件成立が遅れ、結果、空燃比フィードバック制御実施条件成立が遅れた間の燃費や排出ガスが悪化する。このため、インピーダンス初期下限品(目標インピーダンス補正なし)3402のセンサ素子温度をインピーダンス初期中央品3403相当に上げると、空燃比フィードバック制御実施条件成立の遅れによる燃費や排出ガスの悪化を防止できる。
【0278】
そこで、実施の形態11による第3の目標インピーダンス2103(Z_T3)の補正を実施する。即ち、第二制御期間302が長いほど第3の目標インピーダンスを低く補正すると、内燃機関の自動停止毎に補正が実施され、最終的に、インピーダンス初期下限品(目標インピーダンス補正なし)3402における第二制御期間302は第二制御期間302aに、第三制御期間303は第三制御期間303aになり、図34(D)のように、インピーダンス初期下限品(目標インピーダンス補正なし)3402の実インピーダンス3405は、インピーダンス初期下限品(目標インピーダンス補正後)3401の実インピーダンス3404のようになり、図34(E)のように、第三制御期間303aにおけるインピーダンス初期下限品(目標インピーダンス補正後)3401の実センサ素子温度3407は、第三制御期間303aにおけるインピーダンス初期中央品3403の実センサ素子温度3409に対し、等しくなる。結果、図34(B)に示すように、インピーダンス初期下限品(目標インピーダンス補正後)3401は、内燃機関の自動始動後における空燃比の検出要求に対し、センサ素子温度の活性温度への到達遅延を防止し、空燃比フィードバック制御の開始タイミングが遅れず燃費や排出ガスの悪化を防止できる。
【0279】
なお、内燃機関の自動停止中の実センサ素子温度が高いことによるヒータ消費電力の増加と、内燃機関の自動停止中の実センサ素子温度が低いことによる機関自動始動後の空燃比フィードバック制御の開始タイミング遅れの間の燃費や排ガスの悪化は、いわゆるトレードオフの関係にあるが、上記段落[0254]のように、予め、内燃機関の自動停止中のヒータ消費電力、及び、内燃機関の自動始動後の燃費や排ガスの悪化、を抑制できる内燃機関の自動停止中のセンサ素子温度を確認し、自動停止中の実際のセンサ素子温度をこの確認したセンサ素子温度になるよう、実施の形態11により第3の目標インピーダンスを補正することで、センサ素子特性のばらつきや劣化による特性変化などで、センサ素子温度とセンサ素子インピーダンスの関係が変化した場合においても、予め確認した機関自動停止中のヒータ消費電力、及び、機関自動始動後の燃費や排ガスの悪化、を抑制できる性能を維持することができる。
【0280】
以上のように、この発明の実施の形態11の排出ガスセンサのヒータ制御装置は、実施の形態7〜10の発明に対し、第二制御期間の基準期間である基準第二制御期間を備え、第3の目標インピーダンスは、第二制御期間が、基準第二制御期間より、短いほど高く、長いほど低く、補正されるよう構成している。
【0281】
このため、センサ素子特性のばらつきや劣化による特性変化などにより、センサ素子温度とセンサ素子インピーダンスの関係が変化した場合においても、内燃機関の自動停止中の実際のセンサ素子温度を目標温度に保つことで、実際のセンサ素子温度が推定センサ素子温度より高かった場合には、内燃機関の自動停止中におけるヒータ消費電力をさらに低減でき、実際のセンサ素子温度が推定センサ素子温度より低かった場合には、内燃機関の自動始動後における空燃比の検出要求に対しセンサ素子温度の活性温度への到達遅延を防止でき、空燃比フィードバック制御の開始タイミングが遅れず燃費や排出ガスの悪化を防止できる。
【0282】
また、内燃機関の自動停止中のヒータ停止期間で第3の目標インピーダンスを補正することで、例えば、排出ガスセンサの周辺温度といった排出ガスセンサの周辺雰囲気が補正毎に大きく異なることなく、より正確な補正を実行することが可能となる。
【0283】
さらに、内燃機関の自動停止毎に第3の目標インピーダンスを補正することができるため、キーオフなどにより内燃機関を停止したときを利用して同様の補正を実施する場合に比べ、補正する機会が多く、より正確な補正を実行することが可能となる。
【0284】
実施の形態12.
次に、この発明の実施の形態12に係る排出ガスセンサのヒータ制御装置について説明する。実施の形態12は、実施の形態11に対し、より正確に第3の目標インピーダンスを補正できるようにしたものである。
【0285】
実施の形態12は、実施の形態11に対し、以下の点が異なる。
即ち、図35は、実施の形態12の特徴的な制御を説明するフローチャートで、実施の形態11の図32に対して、図35には、ステップS3501が追加されたものである。
以下、図35における図32からの変更点に関し説明する。
【0286】
図35において、ステップS3208で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)より小さいと判定され、ステップS3501で実インピーダンス2104(Z_REAL)が、第3の目標インピーダンス2103(Z_T3)に到達するまでの第一の通過点であるインピーダンスA2901(Z_TA)より大きく、かつ、第3の目標インピーダンス2103(Z_T3)に到達するまでの第二の通過点であるインピーダンスB2902(Z_TB)以下の場合、ステップS3209で、自動停止後の経過時間T_HTRSTPの前回値に演算周期を加算し、ステップS3210で、排出ガスセンサのヒータを停止する。
【0287】
一方、ステップS3501において、実インピーダンス2104(Z_REAL)が、第3の目標インピーダンス2103(Z_T3)に到達するまでの第一の通過点であるインピーダンスA2901(Z_TA)以下、又は、第3の目標インピーダンス2103(Z_T3)に到達するまでの第二の通過点であるインピーダンスB2902(Z_TB)より大きい場合、ステップS3209を実施せずに、ステップS3210で排出ガスセンサのヒータを停止する。
【0288】
ここで、第3の目標インピーダンス2103(Z_T3)に到達するまでの第一の通過点であるインピーダンスA2901(Z_TA)は、制御装置107の自動停止/自動始動装置111による内燃機関101の自動停止開始後の排出ガスセンサのヒータ停止期間、即ち、図29における第二制御期間302の中で設定され、ヒータ停止開始直後の実インピーダンス2104(Z_REAL)の上昇が遅い部分(区間A)を除くように、予め適合試験などにより設定する。
また、第3の目標インピーダンス2103(Z_T3)に到達するまでの第二の通過点であるインピーダンスB2902(Z_TB)は、第一の通過点であるインピーダンスA2901(Z_TA)を通過後、第3の目標インピーダンス2103(Z_T3)に到達直前にあたるインピーダンスを予め適合試験などにより設定する。
このように設定することにより、実インピーダンス2104(Z_REAL)の変化の大きい部分を使用しての補正ができ、より正確に補正を行うことができる。
【0289】
なお、実施の形態12におけるヒータ停止期間の初期値T_T2INIは、図31のインピーダンス中央品3002において、第一の通過点であるインピーダンスA2901(Z_TA)から第二の通過点であるインピーダンスB2902(Z_TB)に到達するまでの時間が設定される。設定値は、制御装置107のROMに記憶され、ステップS3203で使用される。
【0290】
なお、実施の形態12におけるインピーダンスB2902(Z_TB)は、第3の目標インピーダンス2103(Z_T3)と同値にしても、実施の形態12における効果を得ることができる。
【0291】
以上のように、この発明の実施の形態12によれば、実施の形態11の発明に対し、第二制御期間にセンサ素子インピーダンスが上昇し、第3の目標インピーダンスに到達するまでの第一の通過点であるインピーダンスAと、センサ素子インピーダンスがインピーダンスAを通過後、第3の目標インピーダンスに到達前の第二の通過点であるインピーダンスBと、インピーダンスAからインピーダンスBに到達するまでの経過時間を計測する経過時間計測手段と、経過時間計測手段によって計測される経過時間の基準値である基準経過時間を備え、第3の目標インピーダンスは、経過時間計測手段によって計測される経過時間が、基準経過時間より短いほど高く、長いほど低く、補正されるよう構成しているので、実施の形態11の効果に加え、ヒータ停止期間の内、センサ素子インピーダンスの変化が大きい部分の経過時間を使用して第3の目標インピーダンスを補正することができ、より正確な補正を実行することが可能となる。
【0292】
実施の形態13.
次に、この発明の実施の形態13における排出ガスセンサのヒータ制御装置について説明する。実施の形態13は、実施の形態12に対し、以下の点が異なるものである。
即ち、図36は、実施の形態13の特徴的な制御を説明するフローチャートで、実施の形態12の図35に対して、図36にはステップS3602が追加され、ステップS3601、S3603、S3604が変更されている。
以下、図36における図35からの変更点に関し説明する。
【0293】
図36において、ステップS3212で、第3の目標インピーダンス2103(Z_T3)の補正実施条件が成立している場合、ステップS3602で、所定時間あたりのインピーダンスの変化量を下式(19)にて算出し、Z_DLTに格納する。
(Z_TB − Z_TA)÷ T_HTRSTP=Z_DLT・・・式(19)
【0294】
次に、ステップS3603で、所定時間あたりのインピーダンスの変化量Z_DLTが、基準変化量Z_BDLTに、基準変化量Z_BDLTの下側の不感帯量に相当する不感帯Z_BDLTDZ2を減算した値以下のとき、ステップS3214で、第3の目標インピーダンス2103(Z_T3)の前回値から減算補正量Z_C1を減算した値を補正後の第3の目標インピーダンス2103(Z_T3)として、第3の目標インピーダンス2103(Z_T3)に格納し、ステップS3217でF_DONEに1を格納した上で、ステップS3218で、実インピーダンス2104(Z_REAL)が、第3の目標インピーダンス2103(Z_T3)を維持するようヒータへの印加実効電圧が設定される。
【0295】
ステップS3604で、所定時間あたりのインピーダンスの変化量Z_DLTが、基準変化量Z_BDLTに、基準変化量Z_BDLTの上側の不感帯量に相当する不感帯Z_BDLTDZ1を加算した値以上のとき、ステップS3216で、第3の目標インピーダンス2103(Z_T3)の前回値から加算補正量Z_C2を加算した値を補正後の第3の目標インピーダンス2103(Z_T3)として、第3の目標インピーダンス2103(Z_T3)に格納し、ステップS3217でF_DONEに1を格納した上で、ステップS3218で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)を維持するようヒータへの印加実効電圧が設定される。
【0296】
所定時間あたりのインピーダンスの変化量Z_DLTが不感帯内にあるとき、即ち、Z_BDLT−Z_BDLTDZ2<Z_DLT<Z_BDLT+Z_BDLTDZ1の関係にあるとき、ステップS3217でF_DONEに1を格納した上で、ステップS3218で、実インピーダンス2104(Z_REAL)が第3の目標インピーダンス2103(Z_T3)を維持するようヒータへの印加実効電圧が設定される。
【0297】
なお、基準変化量Z_BDLTには、ステップS3601で、基準変化量初期値Z_BDLTINIが格納される。
また、基準変化量初期値Z_BDLTINIには、図31のインピーダンス中央品3002において、第一の通過点であるインピーダンスA2901(Z_TA)と第二の通過点であるインピーダンスB2902(Z_TB)の差分を、第一の通過点であるインピーダンスA2901(Z_TA)から第二の通過点であるインピーダンスB2902(Z_TB)に到達するまでの時間で除算したものである。基準変化量初期値Z_BDLTINIは、制御装置107のROMに記憶され、前記ステップS3601で使用される。
【0298】
以上のように、この発明の実施の形態13は、実施の形態12の発明に対し、第3の目標インピーダンスは、インピーダンスAからインピーダンスBまでの所定時間あたりのインピーダンス変化量が、インピーダンスAからインピーダンスBまでの所定時間あたりのインピーダンス変化量の基準値に対し、大きいほど高く、小さいほど低く、補正されるよう構成したものである。
【0299】
これにより、第二制御期間であるヒータ停止期間の内、センサ素子インピーダンスの変化が大きい部分の所定時間あたりのインピーダンス変化量を使用して第3の目標インピーダンスを補正することができ、より正確な補正を実行することが可能となる。
【0300】
実施の形態14.
次に、この発明の実施の形態14に係る排出ガスセンサのヒータ制御装置について説明する。実施の形態4は、実施の形態11に対し、以下の点が異なるものである。
即ち、図37は、実施の形態4の特徴的な制御を説明するフローチャートで、実施の形態11の図32に対して、図37には、ステップS3701〜S3713が追加されている。
以下、図37における図32からの変更点に関し説明する。
【0301】
図37において、ステップS3201で初期化条件が成立したとき、ステップS3701、S3702の初期化を追加する。即ち、ステップS3701で、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段によって計測可能な最大のインピーダンスの初期値(Z_MAXINI)をZ_MAXに格納し、ステップS3702で、ヒータ制御装置112により、第3の目標インピーダンス2103(Z_T3)となるようヒータへの印加実効電圧を設定するのではなく、ヒータ停止期間(第二制御期間302)に応じて、ヒータへの印加実効電圧を直接設定する手段を実施中であることを示すフラグ(F_VEXE)に0を格納する。
【0302】
インピーダンス計測手段によって計測可能な最大のインピーダンスの初期値(Z_MAXINI)は、例えば、設計したセンサ素子などのハードウェアの構成の制約により決めることが可能である。もしくは、インピーダンス計測手段によって計測されるインピーダンスの計測精度が高い範囲の上限を設定してもよい。
【0303】
その後、ステップS3204〜S3213までの間、実施の形態11と同じ処理を行い、ステップS3213で、自動停止後の経過時間T_HTRSTPが、ヒータ停止期間(T_T2)にヒータ停止期間(T_T2)の上側の不感帯量に相当する不感帯T_T2DZ1を加算した値以上でないと判定され、ステップS3215で、自動停止後の経過時間T_HTRSTPが、ヒータ停止期間(T_T2)にヒータ停止期間(T_T2)の下側の不感帯量に相当する不感帯T_T2DZ2を減算した値以下と判定されたとき、ステップS3703で、第3の目標インピーダンス2103(Z_T3)の前回値から加算補正量Z_C2を加算した値が、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段によって計測可能な最大のインピーダンスZ_MAXより大きいかを判定し、大きいと判定された場合、ステップS3704で、ヒータ停止期間(第二制御期間302)に応じてヒータへの印加実効電圧を直接設定する手段を実施中であることを示すフラグ(F_VEXE)に1を格納する。
【0304】
次に、ステップS3705で、F_VEXEの前回値が0と判定された場合、ステップS3706で、インピーダンス計測手段によって計測可能な最大のインピーダンスZ_MAXを維持するために必要なヒータへの印加実行電圧として、V_MAXにヒータへの印加実効電圧の前回値を格納し、ステップS3707で、ヒータへの印加実効電圧V_T3にV_MAXを格納する。
一方、ステップS3705で、F_VEXEの前回値が0でないと判定された場合、ステップS3708で、ヒータへの印加実効電圧V_T3の前回値から減算補正量V_C2を減算した値をヒータへの印加実効電圧として、ヒータへの印加実効電圧V_T3に格納する。また、ステップS3703で、第3の目標インピーダンス2103(Z_T3)の前回値から加算補正量Z_C2を加算した値が、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段によって計測可能な最大のインピーダンスZ_MAXより大きくないと判定された場合、ステップS3216へ進み、実施の形態11と同じ処理を行う。
【0305】
一方、ステップS3213で、自動停止後の経過時間T_HTRSTPが、ヒータ停止期間(T_T2)にヒータ停止期間(T_T2)の上側の不感帯量に相当する不感帯T_T2DZ1を加算した値以上と判定された場合、ステップS3709で、第3の目標インピーダンス2103(Z_T3)の前回値から減算補正量Z_C1を減算した値が、排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段によって計測可能な最大のインピーダンスZ_MAX以下であるかを判定し、Z_MAX以下でないと判定された場合、ステップS3710で、ヒータへの印加実効電圧V_T3の前回値に加算補正量V_C1を加算した値をヒータへの印加実効電圧として、ヒータへの印加実効電圧V_T3に格納する。
一方、ステップS3709で、Z_MAX以下と判定された場合、ステップS3711で、ヒータ停止期間(第二制御期間302)に応じてヒータへの印加実効電圧を直接設定する手段を実施中であることを示すフラグ(F_VEXE)に0を格納した上で、ステップS3214へ進み、実施の形態11と同じ処理を行う。
【0306】
ステップS3707、S3708、S3709の何れかで、ヒータへの印加実効電圧V_T3にヒータへの印加実効電圧の今回値が格納された後、ステップS3712で、F_DONEに1を格納し、ステップS3713で、ヒータへ印加実効電圧V_T3が印加される。
【0307】
なお、上記実施の形態14において、加算補正量V_C1、及び、減算補正量V_C2は、あらかじめ適合試験などによって設定された値とする。
【0308】
以上のように、この発明の実施の形態14は、実施の形態11の発明に対し、インピー
ダンス計測手段によって計測可能な最大のインピーダンス以上に、第3の目標インピーダンスを設定する場合、第二制御期間に応じて目標ヒータ印加実効電圧を設定するよう構成したものである。
【0309】
センサ素子インピーダンスは、低温であるほど、センサ素子温度の変化に対するセンサ素子インピーダンスの変化が大きくなる特性を有し、この低温域までインピーダンスを計測する場合、高温域と低温域とで、計測感度(言い換えると、分解能)を変えたり、目標インピーダンスにフィードバック制御する際のフィードバックゲインを変えたりする必要があるが、実施の形態14の発明によれば、コストアップにつながるハードウェアの追加変更の必要なく低温域に制御することが可能となる。
【0310】
実施の形態15.
次に、この発明の実施の形態15に係る排出ガスセンサのヒータ制御装置について説明する。実施の形態15は、実施の形態12において、以下の点が異なるものである。
即ち、図38は、実施の形態15の特徴的な制御を説明するフローチャートで、実施の形態12の図35に対して、図38には、ステップS3801〜S3803が追加されている。
以下、図38における図35からの変更点に関し説明する。
【0311】
図38において、ステップS3201で初期化条件が成立したとき、ステップS3801で、排出ガスセンサが故障していることを示す排出ガスセンサ故障フラグF_FAILに0を格納し、初期化を実施する。
【0312】
その後、ステップS3204〜S3216までの間、実施の形態12と同じ処理を行い、ステップS3214、又は、ステップS3216で、第3の目標インピーダンス2103(Z_T3)が更新されたとき、ステップS3802で、自動停止後の経過時間T_HTRSTPが、インピーダンス正常品の場合の自動停止後の経過時間の下限値T_FAILより短いかを判定する。
ステップS3802で短いと判定された場合、排出ガスセンサが故障していると判定し、ステップS3803で、排出ガスセンサ故障フラグF_FAILに1を格納した上でステップS3217へ進み、以降、実施の形態12と同じ処理を行う。
一方、ステップS3802で短くないと判定された場合は、ステップS3217へ進み、実施の形態12と同じ処理を行う。
【0313】
以上のように、この発明の実施の形態15は、実施の形態12におけるインピーダンスAからインピーダンスBまでの経過時間の短さ、又は、実施の形態13におけるインピーダンスAからインピーダンスBまでの所定時間あたりのインピーダンス変化量の大きさ、に基づいて、排出ガスセンサの故障判定を行うよう構成したものである。
【0314】
これにより、内燃機関の自動停止中のヒータ停止期間に排出ガスセンサの故障判定を行うことで、例えば、排出ガスセンサの周辺温度といった排出ガスセンサの周辺雰囲気に影響されることなく、より正確に判定することが可能となり、また、故障判定頻度も増やすことができる。
【0315】
なお、上記実施の形態11〜15においては、キーオフ時に第3の目標インピーダンス2103(Z_T3)を初期値Z_T3INIに格納した上で、第3の目標インピーダンス2103の初期値(Z_T3INI)を書き換え可能な不揮発性メモリに記憶させ、次回キーオン初期化時にこのZ_T3INIを使用してもよい。
【0316】
なお、上記実施の形態1〜15における排出ガスセンサ105、及び、排出ガスセンサ
106は、排出ガス中の空燃比を検出するもの(いわゆるリニアA/Fセンサ)、又は、理論空燃比に対しリッチ/リーンの傾向を検出するのもの(いわゆるλO2センサ)のいずれであってもよい。
【符号の説明】
【0317】
101…内燃機関、102…吸気通路、103…排気通路、104…触媒、
105…第1の排出ガスセンサ、106…第2の排出ガスセンサ、107…制御装置、
108…各種センサ、109…インジェクタ、110…空燃比制御装置、
111…自動停止/自動始動装置、112…排出ガスセンサのヒータ制御装置、
AF1…第一の空燃比に対応した検出信号、AF2…第二の空燃比に対応した検出信号、
201…センサ素子、202…ヒータ、301…第一制御期間、302…第二制御期間、
303…第三制御期間、304…第四制御期間、305…第1の目標印加実効電圧、
306…第2の目標印加実効電圧、307…第3の目標印加実効電圧、
308…センサ素子目標温度(内燃機関運転中)、
309…排出ガスセンサの活性下限温度、
310…センサ素子目標温度(内燃機関自動停止中)、
311…第二/第三/第四制御期間におけるヒータの消費電力量の合計、
T1…第二制御期間終了時間、T2…第四制御期間終了時間、
2101…第1の目標インピーダンス(Z_T1)、
2102…第2の目標インピーダンス(Z_T2)、
2103…第3の目標インピーダンス(Z_T3)、
2104…実インピーダンス(Z_REAL)、
2901…インピーダンスA(Z_TA)、2902…インピーダンスB(Z_TB)、
3001…インピーダンス初期下限品、3002…インピーダンス初期中央品、
3003…インピーダンス初期上限品、3004…インピーダンス劣化品、
3005…ばらつき範囲、3006…ばらつき範囲、
3007…センサ素子の実温度変化、
3101、3102A、3102B…センサ素子の実温度、
3103A、3103B…補正後の第3の目標インピーダンス、
3104、3105A、3105B…ヒータへの印加実効電圧を0Vとしてからの経過時間、
3301…インピーダンス劣化品(目標インピーダンス補正後)、
3302…インピーダンス劣化品(目標インピーダンス補正なし)、
3303…インピーダンス初期中央品、
3304…インピーダンス劣化品(目標インピーダンス補正後)の実インピーダンス、
3305…インピーダンス劣化品(目標インピーダンス補正無)の実インピーダンス、
3306…インピーダンス初期中央品の実インピーダンス、
3307…インピーダンス劣化品(目標インピーダンス補正後)の実センサ素子温度、
3308…インピーダンス劣化品(目標インピーダンス補正無)の実センサ素子温度、
3309…インピーダンス初期中央品の実センサ素子温度、
3310…消費電力低減量、
3401…インピーダンス初期下限品(インピーダンス補正後)、
3402…インピーダンス初期下限品(インピーダンス補正なし)、
3403…インピーダンス初期中央品、
3404…インピーダンス初期下限品(インピーダンス補正後)の実インピーダンス、
3405…インピーダンス初期下限品(インピーダンス補正無)の実インピーダンス、
3406…インピーダンス初期中央品の実インピーダンス、
3407…インピーダンス初期下限品(インピーダンス補正後)の実センサ素子温度、
3408…インピーダンス初期下限品(インピーダンス補正無)の実センサ素子温度、
3409…インピーダンス初期中央品の実センサ素子温度。
【特許請求の範囲】
【請求項1】
内燃機関の停止条件が成立したときに前記内燃機関を自動停止し、前記内燃機関の始動条件が成立したときに前記内燃機関を自動始動する前記内燃機関の自動停止/自動始動装置と、前記内燃機関の排気通路に設けられ、排出ガス中の空燃比、又は、排出ガスの理論空燃比からのリッチ/リーンの傾向、の少なくとも一方を検出する排出ガスセンサと、前記排出ガスセンサを加熱するヒータと、前記ヒータへの印加実効電圧を目標ヒータ印加実効電圧となるように制御するヒータ制御装置を備え、前記ヒータ制御装置は、
前記目標ヒータ印加実効電圧を、前記排出ガスセンサのセンサ素子温度が前記内燃機関の運転中のセンサ素子目標温度となるような第1の目標印加実効電圧に設定する第一制御期間と、前記内燃機関の自動停止開始後、前記目標ヒータ印加実効電圧を、前記第1の目標印加実効電圧より低い第2の目標印加実効電圧に設定する第二制御期間と、前記第二制御期間中に、前記第二制御期間の終了を判定する第二制御期間終了判定手段と、前記第二制御期間終了判定手段により、前記第二制御期間の終了判定後、前記目標ヒータ印加実効電圧を、前記第2の目標印加実効電圧より高く、前記排出ガスセンサのセンサ素子温度が前記内燃機関の自動停止中のセンサ素子目標温度となるような第3の目標印加実効電圧に制御する第三制御期間とを備えることを特徴とする内燃機関の制御装置。
【請求項2】
前記排出ガスセンサの検出値に応じ、前記内燃機関への燃料噴射量を補正する燃料噴射量補正手段を備え、前記ヒータ制御装置は、前記内燃機関の自動始動後、前記目標ヒータ印加実効電圧を、前記内燃機関の運転中のセンサ素子目標温度になるまで、前記第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、前記第四制御期間は、前記内燃機関の自動始動後、前記燃料噴射量補正手段が動作を開始するまでに終了するよう設定され、前記内燃機関の自動停止中のセンサ素子目標温度は、前記第二制御期間、前記第三制御期間及び前記第四制御期間におけるヒータ消費電力量の合計が最小となるように設定されることを特徴とする請求項1に記載の内燃機関の制御装置。
【請求項3】
前記ヒータ制御装置は、前記内燃機関の自動停止開始からの経過時間を計測する自動停止経過時間計測手段を備え、前記第二制御期間終了判定手段は、前記自動停止経過時間計測手段によって計測された自動停止開始からの経過時間が、第二制御期間終了時間を経過した際に、前記第二制御期間の終了を判定することを特徴とする請求項1または請求項2に記載の内燃機関の制御装置。
【請求項4】
前記第二制御期間終了時間は、前記内燃機関の自動停止開始から、前記排出ガスセンサのセンサ素子温度が前記内燃機関の自動停止中のセンサ素子目標温度に到達するまでの時間に設定されることを特徴とする請求項3に記載の内燃機関の制御装置。
【請求項5】
前記ヒータ制御装置は、内燃機関の自動停止/自動始動が連続することを判定する自動停止/自動始動連続判定手段を備え、前記自動停止/自動始動連続判定手段が、自動停止/自動始動が連続していると判定したとき、前記第二制御期間終了時間が短くなるよう補正されることを特徴とする請求項3または請求項4に記載の内燃機関の制御装置。
【請求項6】
前記ヒータ制御装置は、前記内燃機関の自動停止/自動始動が連続することを判定する自動停止/自動始動連続判定手段を備え、前記自動停止/自動始動連続判定手段が、自動停止/自動始動が連続していると判定したとき、前記第3の目標印加実効電圧が高くなるよう補正されることを特徴とする請求項1〜請求項5のいずれか1項に記載の内燃機関の制御装置。
【請求項7】
前記自動停止/自動始動の連続とは、前記内燃機関の自動始動後、前記排出ガスセンサが活性状態になる前に、再び前記内燃機関の自動停止を開始する状態であることを特徴とする請求項5または請求項6に記載の内燃機関の制御装置。
【請求項8】
前記ヒータ制御装置は、前記排出ガスセンサの周辺温度を推定するセンサ周辺温度推定手段を備え、前記第3の目標印加実効電圧は、前記センサ周辺温度推定手段によって推定されるセンサ周辺温度に応じて補正されること特徴とする請求項1〜請求項7のいずれか1項に記載の内燃機関の制御装置。
【請求項9】
前記ヒータ制御装置は、前記内燃機関の自動停止開始からの経過時間を計測する自動停止経過時間計測手段を備え、前記第3の目標印加実効電圧は、前記自動停止経過時間計測手段によって計測される自動停止開始からの経過時間が長いほど高く補正されることを特徴とする請求項1〜請求項8のいずれか1項に記載の内燃機関の制御装置。
【請求項10】
前記ヒータ制御装置は、前記排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段と、前記インピーダンス計測手段によって計測されたセンサ素子インピーダンスが、目標インピーダンスとなるよう前記ヒータへの印加実効電圧を設定する印加実効電圧設定手段を備え、前記印加実効電圧設定手段は、前記第一制御期間において
、前記センサ素子インピーダンスが、前記内燃機関の運転中のセンサ素子目標温度に相関する第1の目標インピーダンスになるよう、前記第1の目標印加実効電圧を設定し、前記内燃機関の自動停止開始後、前記第二制御期間において、前記センサ素子インピーダンスが、前記第1の目標インピーダンスより高い第2の目標インピーダンスになるよう、前記第2の目標印加実効電圧を設定し、前記第二制御期間終了判定手段により、前記第二制御期間の終了判定後、前記第三制御期間において、前記センサ素子インピーダンスが、前記内燃機関の自動停止中のセンサ素子目標温度に相関する第3の目標インピーダンスになるよう、前記第3の目標印加実効電圧を設定することを特徴とする請求項1に記載の内燃機関の制御装置。
【請求項11】
前記第二制御期間終了判定手段は、前記内燃機関の自動停止開始後、前記第二制御期間において、前記センサ素子インピーダンスが、前記第3の目標インピーダンスに到達した際に、前記第二制御期間の終了を判定することを特徴とする請求項10に記載の内燃機関の制御装置。
【請求項12】
前記印加実効電圧設定手段は、前記内燃機関の自動停止開始後、前記第二制御期間において、前記第1の目標印加実効電圧より低い目標印加実効電圧、もしくは、0V(即ち、前記ヒータを停止)になるよう前記第2の目標印加実効電圧を設定することを特徴とする請求項10または請求項11に記載の内燃機関の制御装置。
【請求項13】
前記排出ガスセンサの検出値に応じ、前記内燃機関への燃料噴射量を補正する燃料噴射量補正手段を備え、前記ヒータ制御装置は、前記内燃機関の自動始動後、前記目標ヒータ印加実効電圧を、前記内燃機関の運転中のセンサ素子目標温度になるまで、前記第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、前記第四制御期間は、前記内燃機関の自動始動後、前記燃料噴射量補正手段が動作を開始するまでに終了するよう設定され、前記内燃機関の自動停止中のセンサ素子目標温度は、前記第二制御期間、前記第三制御期間、前記第四制御期間におけるヒータ消費電力量が最小となるように設定されることを特徴とする請求項10〜請求項12のいずれか1項に記載の排出ガスセンサのヒータ内燃機関の制御装置。
【請求項14】
前記ヒータ制御装置は、前記排出ガスセンサの周辺温度を推定するセンサ周辺温度推定手段を備え、前記第3の目標インピーダンスは、前記センサ周辺温度推定手段によって推定されるセンサ周辺温度に応じて補正されること特徴とする請求項10〜請求項13のいずれか1項に記載の内燃機関の制御装置制御装置。
【請求項15】
前記第3の目標インピーダンスは、前記自動停止経過時間計測手段によって計測される自動停止開始からの経過時間が長いほど低く補正されることを特徴とする請求項10〜請求項14のいずれか1項に記載の排出ガスセンサのヒータ内燃機関の制御装置。
【請求項16】
前記ヒータ制御装置は、前記内燃機関の自動停止開始から自動停止終了までの自動停止時間を計測する自動停止時間計測手段と、前記内燃機関の自動始動後、前記目標ヒータ印加実効電圧を、前記内燃機関の運転中のセンサ素子目標温度になるまで、前記第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、前記第四制御期間において、前記第4の目標印加実効電圧と前記第4の目標印加実効電圧を印加する印加期間のいずれか1つ、または、両方は、前記自動停止時間計測手段によって計測された自動停止時間に応じて補正されることを特徴とする請求項1〜請求項15のいずれか1項に記載の内燃機関の制御装置。
【請求項17】
前記ヒータ制御装置は、前記排出ガスセンサの周辺温度を推定するセンサ周辺温度推定手段と、前記内燃機関の自動始動後、前記目標ヒータ印加実効電圧を、前記内燃機関の運転中のセンサ素子目標温度になるまで、前記第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、前記第四制御期間において、前記第4の目標印加実効電圧と前記第4の目標印加実効電圧を印加する印加期間のいずれか1つ、または、両方は、前記センサ周辺温度推定手段によって推定されるセンサ周辺温度に基づき補正されることを特徴とする請求項1〜請求項16のいずれか1項に記載の内燃機関の制御装置。
【請求項18】
前記ヒータ制御装置は、前記第二制御期間の基準期間である基準第二制御期間を備え、
前記第3の目標インピーダンスは、前記第二制御期間が、前記基準第二制御期間より、短いほど高く、長いほど低く、補正されることを特徴とする請求項10〜請求項15のいずれか1項に記載の内燃機関の制御装置。
【請求項19】
前記ヒータ制御装置は、前記第二制御期間に前記センサ素子インピーダンスが上昇し、前記第3の目標インピーダンスに到達するまでの第一の通過点であるインピーダンスAと
、前記センサ素子インピーダンスが前記インピーダンスAを通過後、前記第3の目標インピーダンスに到達するまでの第二の通過点であるインピーダンスBと、前記インピーダンスAから前記インピーダンスBに到達するまでの経過時間を計測する経過時間計測手段と
、前記経過時間計測手段によって計測される経過時間の基準値である基準経過時間とを備え、前記第3の目標インピーダンスは、前記経過時間計測手段によって計測される経過時間が、前記基準経過時間より短いほど高く、長いほど低く、補正されることを特徴とする請求項18に記載の排出ガスセンサのヒータ内燃機関の制御装置。
【請求項20】
前記第3の目標インピーダンスは、前記インピーダンスAから前記インピーダンスBまでの所定時間あたりのインピーダンス変化量が、前記インピーダンスAから前記インピーダンスBまでの所定時間あたりのインピーダンス変化量の基準値に対し、大きいほど高く
、小さいほど低く補正されることを特徴とする請求項19に記載の内燃機関の制御装置。
【請求項21】
前記インピーダンス計測手段によって計測可能な最大のインピーダンス以上に、前記第3の目標インピーダンスを設定する場合は、前記第二制御期間に応じて目標ヒータ印加実効電圧を設定することを特徴とする請求項18〜請求項20のいずれか1項に記載の内燃機関の制御装置。
【請求項22】
前記第二制御期間の前記基準第二制御期間に対する短さ、又は、前記インピーダンスAから前記インピーダンスBまでの経過時間の短さ、又は、前記インピーダンスAから前記インピーダンスBまでの所定時間あたりのインピーダンス変化量の大きさに基づいて、前記排出ガスセンサの故障判定を行う故障判定手段を備えたことを特徴とする請求項18〜請求項21のいずれか1項に記載の排出ガスセンサのヒータ制御装置。
【請求項1】
内燃機関の停止条件が成立したときに前記内燃機関を自動停止し、前記内燃機関の始動条件が成立したときに前記内燃機関を自動始動する前記内燃機関の自動停止/自動始動装置と、前記内燃機関の排気通路に設けられ、排出ガス中の空燃比、又は、排出ガスの理論空燃比からのリッチ/リーンの傾向、の少なくとも一方を検出する排出ガスセンサと、前記排出ガスセンサを加熱するヒータと、前記ヒータへの印加実効電圧を目標ヒータ印加実効電圧となるように制御するヒータ制御装置を備え、前記ヒータ制御装置は、
前記目標ヒータ印加実効電圧を、前記排出ガスセンサのセンサ素子温度が前記内燃機関の運転中のセンサ素子目標温度となるような第1の目標印加実効電圧に設定する第一制御期間と、前記内燃機関の自動停止開始後、前記目標ヒータ印加実効電圧を、前記第1の目標印加実効電圧より低い第2の目標印加実効電圧に設定する第二制御期間と、前記第二制御期間中に、前記第二制御期間の終了を判定する第二制御期間終了判定手段と、前記第二制御期間終了判定手段により、前記第二制御期間の終了判定後、前記目標ヒータ印加実効電圧を、前記第2の目標印加実効電圧より高く、前記排出ガスセンサのセンサ素子温度が前記内燃機関の自動停止中のセンサ素子目標温度となるような第3の目標印加実効電圧に制御する第三制御期間とを備えることを特徴とする内燃機関の制御装置。
【請求項2】
前記排出ガスセンサの検出値に応じ、前記内燃機関への燃料噴射量を補正する燃料噴射量補正手段を備え、前記ヒータ制御装置は、前記内燃機関の自動始動後、前記目標ヒータ印加実効電圧を、前記内燃機関の運転中のセンサ素子目標温度になるまで、前記第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、前記第四制御期間は、前記内燃機関の自動始動後、前記燃料噴射量補正手段が動作を開始するまでに終了するよう設定され、前記内燃機関の自動停止中のセンサ素子目標温度は、前記第二制御期間、前記第三制御期間及び前記第四制御期間におけるヒータ消費電力量の合計が最小となるように設定されることを特徴とする請求項1に記載の内燃機関の制御装置。
【請求項3】
前記ヒータ制御装置は、前記内燃機関の自動停止開始からの経過時間を計測する自動停止経過時間計測手段を備え、前記第二制御期間終了判定手段は、前記自動停止経過時間計測手段によって計測された自動停止開始からの経過時間が、第二制御期間終了時間を経過した際に、前記第二制御期間の終了を判定することを特徴とする請求項1または請求項2に記載の内燃機関の制御装置。
【請求項4】
前記第二制御期間終了時間は、前記内燃機関の自動停止開始から、前記排出ガスセンサのセンサ素子温度が前記内燃機関の自動停止中のセンサ素子目標温度に到達するまでの時間に設定されることを特徴とする請求項3に記載の内燃機関の制御装置。
【請求項5】
前記ヒータ制御装置は、内燃機関の自動停止/自動始動が連続することを判定する自動停止/自動始動連続判定手段を備え、前記自動停止/自動始動連続判定手段が、自動停止/自動始動が連続していると判定したとき、前記第二制御期間終了時間が短くなるよう補正されることを特徴とする請求項3または請求項4に記載の内燃機関の制御装置。
【請求項6】
前記ヒータ制御装置は、前記内燃機関の自動停止/自動始動が連続することを判定する自動停止/自動始動連続判定手段を備え、前記自動停止/自動始動連続判定手段が、自動停止/自動始動が連続していると判定したとき、前記第3の目標印加実効電圧が高くなるよう補正されることを特徴とする請求項1〜請求項5のいずれか1項に記載の内燃機関の制御装置。
【請求項7】
前記自動停止/自動始動の連続とは、前記内燃機関の自動始動後、前記排出ガスセンサが活性状態になる前に、再び前記内燃機関の自動停止を開始する状態であることを特徴とする請求項5または請求項6に記載の内燃機関の制御装置。
【請求項8】
前記ヒータ制御装置は、前記排出ガスセンサの周辺温度を推定するセンサ周辺温度推定手段を備え、前記第3の目標印加実効電圧は、前記センサ周辺温度推定手段によって推定されるセンサ周辺温度に応じて補正されること特徴とする請求項1〜請求項7のいずれか1項に記載の内燃機関の制御装置。
【請求項9】
前記ヒータ制御装置は、前記内燃機関の自動停止開始からの経過時間を計測する自動停止経過時間計測手段を備え、前記第3の目標印加実効電圧は、前記自動停止経過時間計測手段によって計測される自動停止開始からの経過時間が長いほど高く補正されることを特徴とする請求項1〜請求項8のいずれか1項に記載の内燃機関の制御装置。
【請求項10】
前記ヒータ制御装置は、前記排出ガスセンサのセンサ素子インピーダンスを計測するインピーダンス計測手段と、前記インピーダンス計測手段によって計測されたセンサ素子インピーダンスが、目標インピーダンスとなるよう前記ヒータへの印加実効電圧を設定する印加実効電圧設定手段を備え、前記印加実効電圧設定手段は、前記第一制御期間において
、前記センサ素子インピーダンスが、前記内燃機関の運転中のセンサ素子目標温度に相関する第1の目標インピーダンスになるよう、前記第1の目標印加実効電圧を設定し、前記内燃機関の自動停止開始後、前記第二制御期間において、前記センサ素子インピーダンスが、前記第1の目標インピーダンスより高い第2の目標インピーダンスになるよう、前記第2の目標印加実効電圧を設定し、前記第二制御期間終了判定手段により、前記第二制御期間の終了判定後、前記第三制御期間において、前記センサ素子インピーダンスが、前記内燃機関の自動停止中のセンサ素子目標温度に相関する第3の目標インピーダンスになるよう、前記第3の目標印加実効電圧を設定することを特徴とする請求項1に記載の内燃機関の制御装置。
【請求項11】
前記第二制御期間終了判定手段は、前記内燃機関の自動停止開始後、前記第二制御期間において、前記センサ素子インピーダンスが、前記第3の目標インピーダンスに到達した際に、前記第二制御期間の終了を判定することを特徴とする請求項10に記載の内燃機関の制御装置。
【請求項12】
前記印加実効電圧設定手段は、前記内燃機関の自動停止開始後、前記第二制御期間において、前記第1の目標印加実効電圧より低い目標印加実効電圧、もしくは、0V(即ち、前記ヒータを停止)になるよう前記第2の目標印加実効電圧を設定することを特徴とする請求項10または請求項11に記載の内燃機関の制御装置。
【請求項13】
前記排出ガスセンサの検出値に応じ、前記内燃機関への燃料噴射量を補正する燃料噴射量補正手段を備え、前記ヒータ制御装置は、前記内燃機関の自動始動後、前記目標ヒータ印加実効電圧を、前記内燃機関の運転中のセンサ素子目標温度になるまで、前記第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、前記第四制御期間は、前記内燃機関の自動始動後、前記燃料噴射量補正手段が動作を開始するまでに終了するよう設定され、前記内燃機関の自動停止中のセンサ素子目標温度は、前記第二制御期間、前記第三制御期間、前記第四制御期間におけるヒータ消費電力量が最小となるように設定されることを特徴とする請求項10〜請求項12のいずれか1項に記載の排出ガスセンサのヒータ内燃機関の制御装置。
【請求項14】
前記ヒータ制御装置は、前記排出ガスセンサの周辺温度を推定するセンサ周辺温度推定手段を備え、前記第3の目標インピーダンスは、前記センサ周辺温度推定手段によって推定されるセンサ周辺温度に応じて補正されること特徴とする請求項10〜請求項13のいずれか1項に記載の内燃機関の制御装置制御装置。
【請求項15】
前記第3の目標インピーダンスは、前記自動停止経過時間計測手段によって計測される自動停止開始からの経過時間が長いほど低く補正されることを特徴とする請求項10〜請求項14のいずれか1項に記載の排出ガスセンサのヒータ内燃機関の制御装置。
【請求項16】
前記ヒータ制御装置は、前記内燃機関の自動停止開始から自動停止終了までの自動停止時間を計測する自動停止時間計測手段と、前記内燃機関の自動始動後、前記目標ヒータ印加実効電圧を、前記内燃機関の運転中のセンサ素子目標温度になるまで、前記第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、前記第四制御期間において、前記第4の目標印加実効電圧と前記第4の目標印加実効電圧を印加する印加期間のいずれか1つ、または、両方は、前記自動停止時間計測手段によって計測された自動停止時間に応じて補正されることを特徴とする請求項1〜請求項15のいずれか1項に記載の内燃機関の制御装置。
【請求項17】
前記ヒータ制御装置は、前記排出ガスセンサの周辺温度を推定するセンサ周辺温度推定手段と、前記内燃機関の自動始動後、前記目標ヒータ印加実効電圧を、前記内燃機関の運転中のセンサ素子目標温度になるまで、前記第1の目標印加実効電圧以上である第4の目標印加実効電圧に設定する第四制御期間を備え、前記第四制御期間において、前記第4の目標印加実効電圧と前記第4の目標印加実効電圧を印加する印加期間のいずれか1つ、または、両方は、前記センサ周辺温度推定手段によって推定されるセンサ周辺温度に基づき補正されることを特徴とする請求項1〜請求項16のいずれか1項に記載の内燃機関の制御装置。
【請求項18】
前記ヒータ制御装置は、前記第二制御期間の基準期間である基準第二制御期間を備え、
前記第3の目標インピーダンスは、前記第二制御期間が、前記基準第二制御期間より、短いほど高く、長いほど低く、補正されることを特徴とする請求項10〜請求項15のいずれか1項に記載の内燃機関の制御装置。
【請求項19】
前記ヒータ制御装置は、前記第二制御期間に前記センサ素子インピーダンスが上昇し、前記第3の目標インピーダンスに到達するまでの第一の通過点であるインピーダンスAと
、前記センサ素子インピーダンスが前記インピーダンスAを通過後、前記第3の目標インピーダンスに到達するまでの第二の通過点であるインピーダンスBと、前記インピーダンスAから前記インピーダンスBに到達するまでの経過時間を計測する経過時間計測手段と
、前記経過時間計測手段によって計測される経過時間の基準値である基準経過時間とを備え、前記第3の目標インピーダンスは、前記経過時間計測手段によって計測される経過時間が、前記基準経過時間より短いほど高く、長いほど低く、補正されることを特徴とする請求項18に記載の排出ガスセンサのヒータ内燃機関の制御装置。
【請求項20】
前記第3の目標インピーダンスは、前記インピーダンスAから前記インピーダンスBまでの所定時間あたりのインピーダンス変化量が、前記インピーダンスAから前記インピーダンスBまでの所定時間あたりのインピーダンス変化量の基準値に対し、大きいほど高く
、小さいほど低く補正されることを特徴とする請求項19に記載の内燃機関の制御装置。
【請求項21】
前記インピーダンス計測手段によって計測可能な最大のインピーダンス以上に、前記第3の目標インピーダンスを設定する場合は、前記第二制御期間に応じて目標ヒータ印加実効電圧を設定することを特徴とする請求項18〜請求項20のいずれか1項に記載の内燃機関の制御装置。
【請求項22】
前記第二制御期間の前記基準第二制御期間に対する短さ、又は、前記インピーダンスAから前記インピーダンスBまでの経過時間の短さ、又は、前記インピーダンスAから前記インピーダンスBまでの所定時間あたりのインピーダンス変化量の大きさに基づいて、前記排出ガスセンサの故障判定を行う故障判定手段を備えたことを特徴とする請求項18〜請求項21のいずれか1項に記載の排出ガスセンサのヒータ制御装置。
【図1】


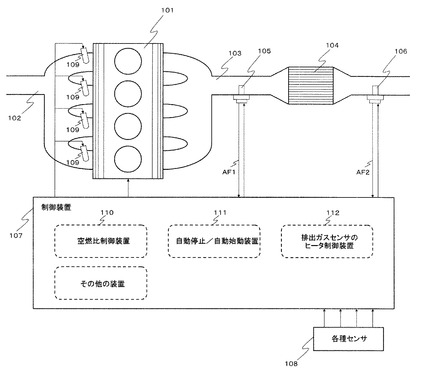
【図2】
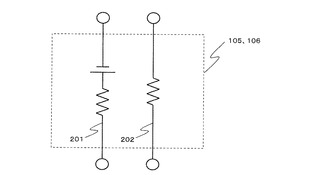
【図3】
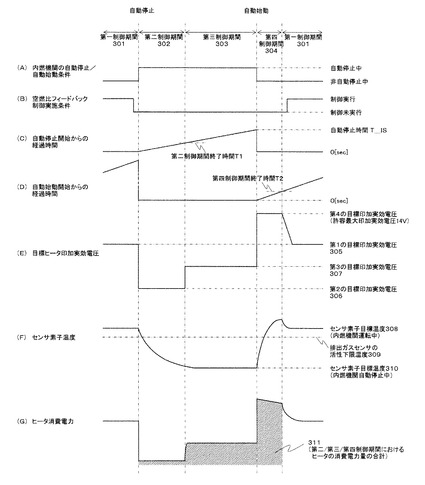
【図4】
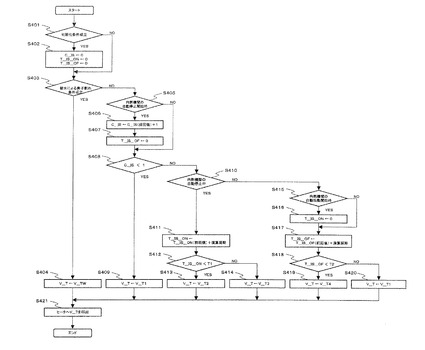
【図5】
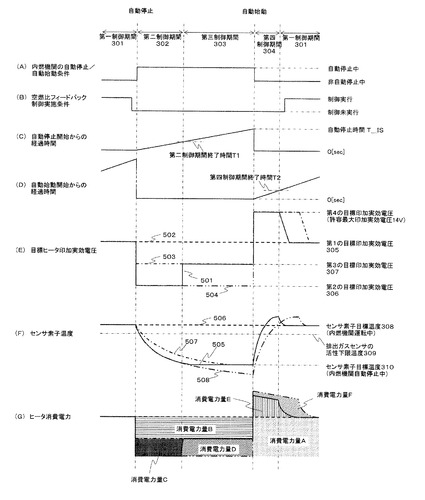
【図6】

【図7】
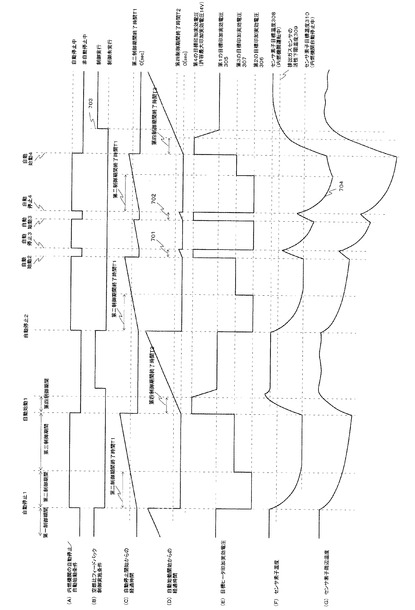
【図8】
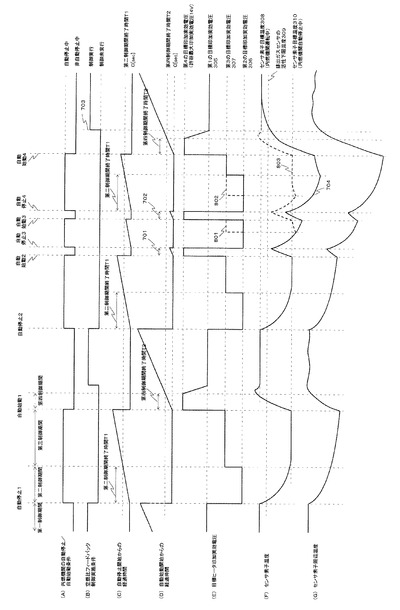
【図9】
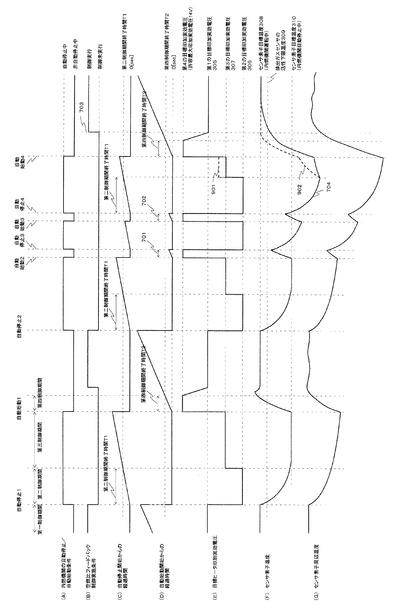
【図10】
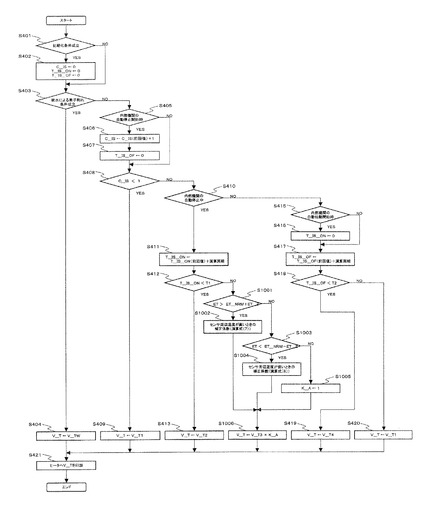
【図11】
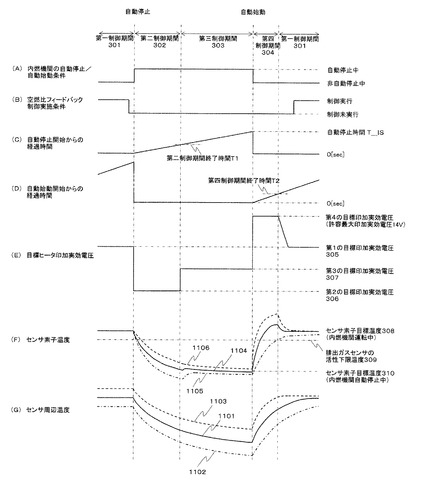
【図12】
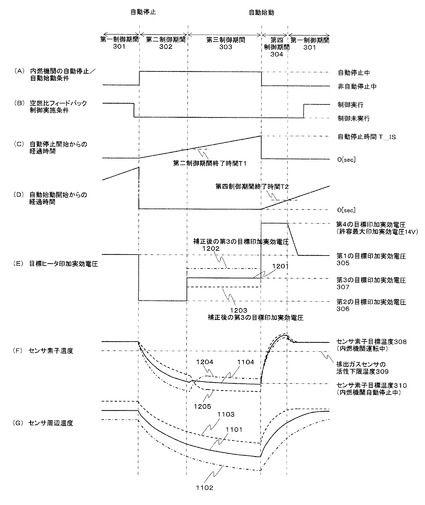
【図13】
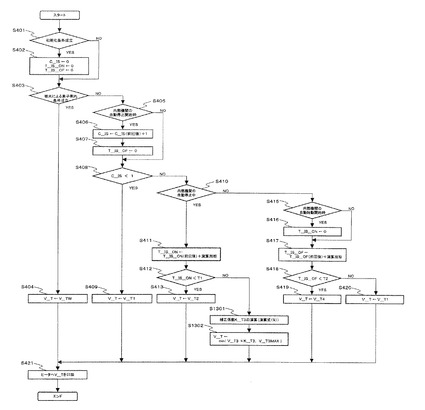
【図14】
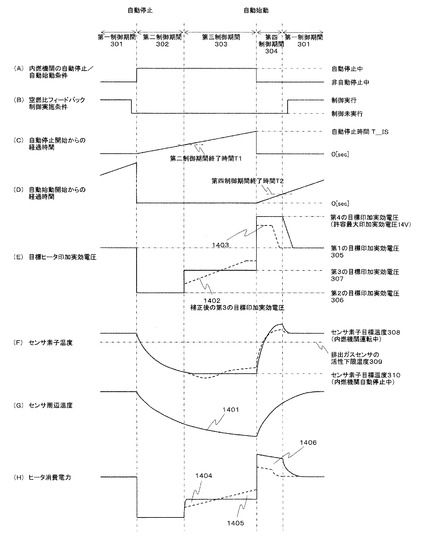
【図15】

【図16】
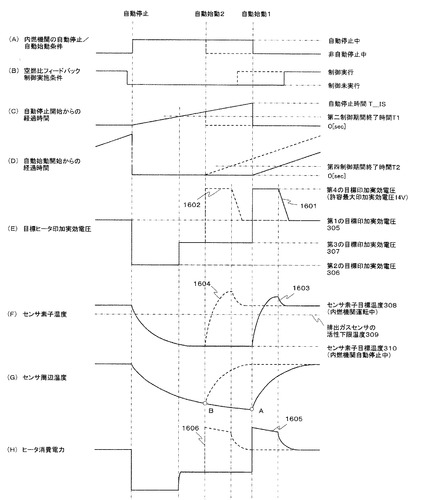
【図17】
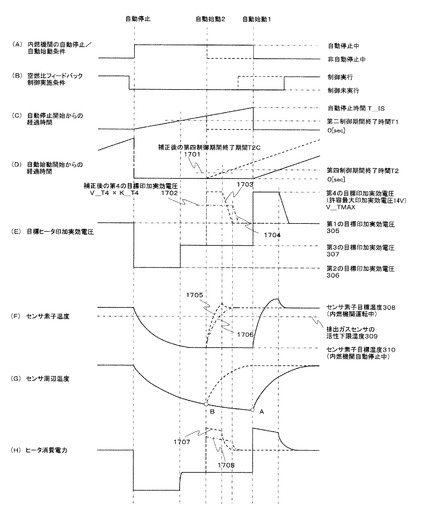
【図18】
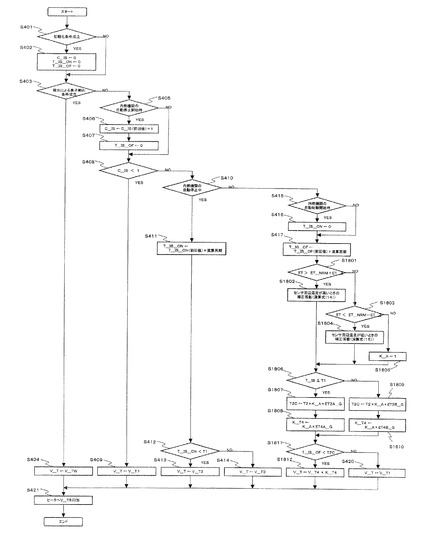
【図19】
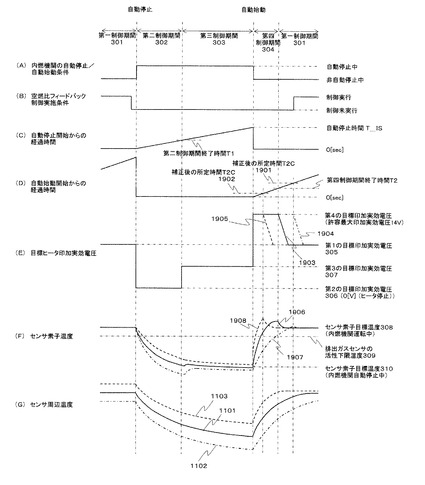
【図20】
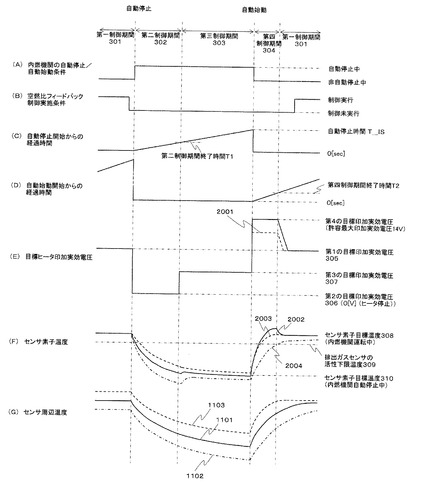
【図21】
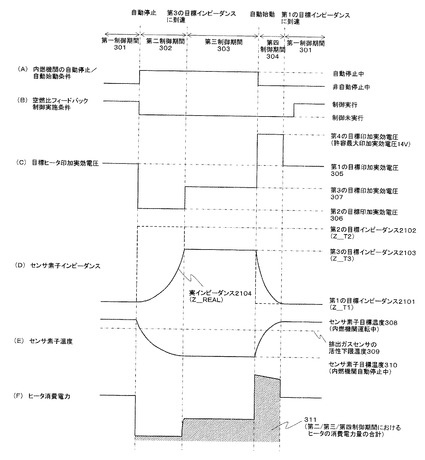
【図22】

【図23】

【図24】
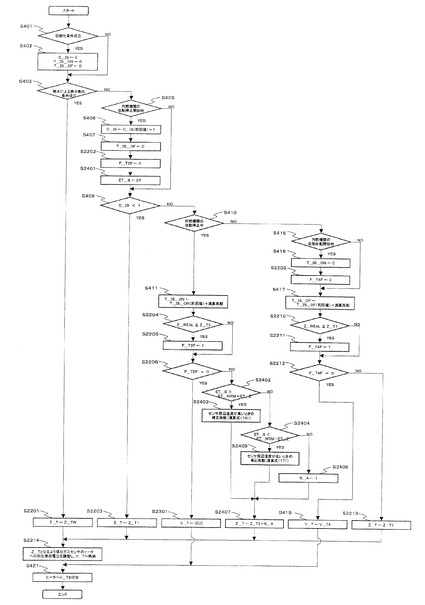
【図25】
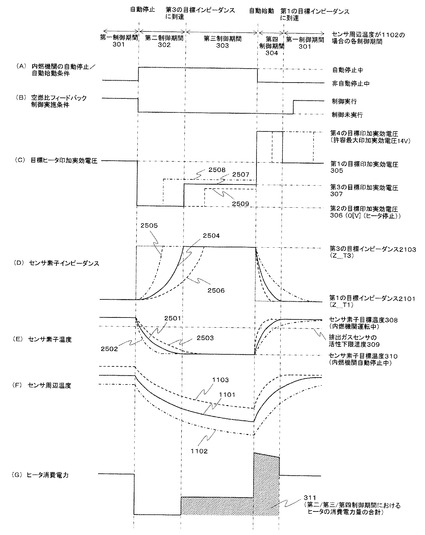
【図26】
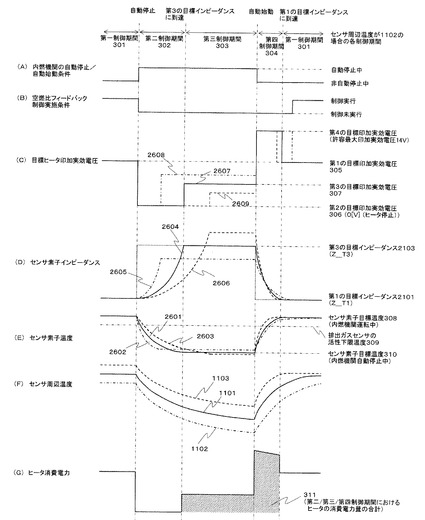
【図27】
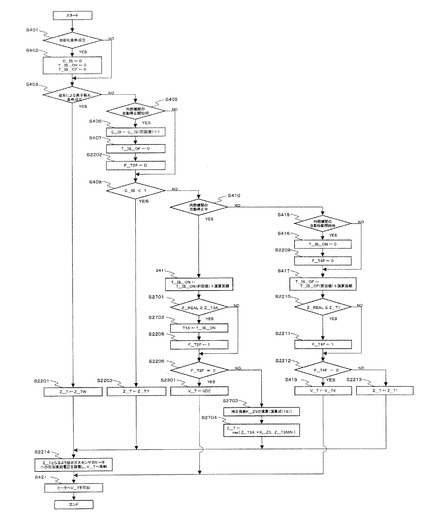
【図28】
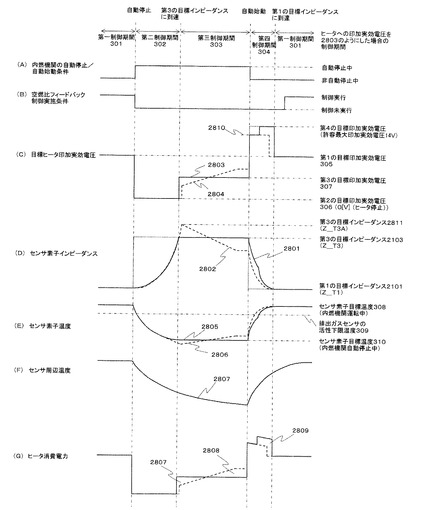
【図29】
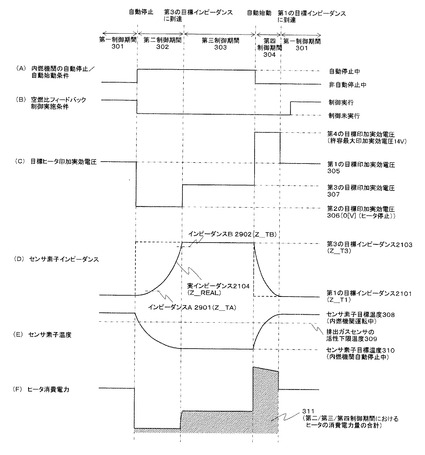
【図30】
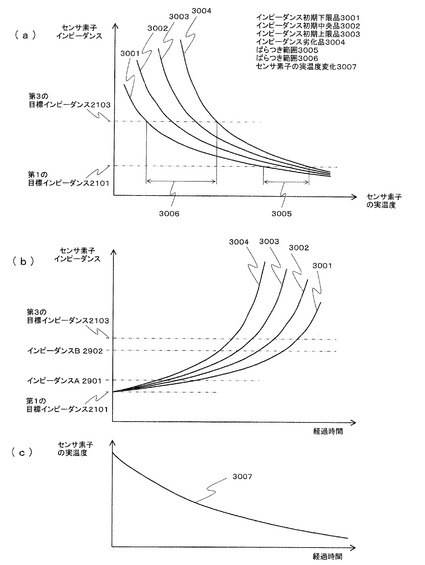
【図31】
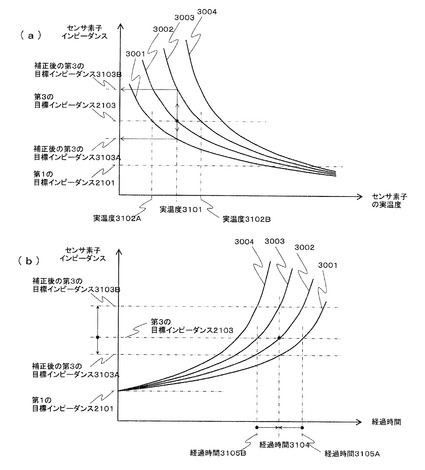
【図32】
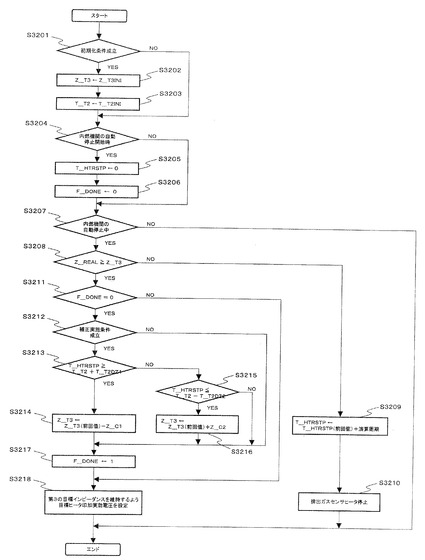
【図33】
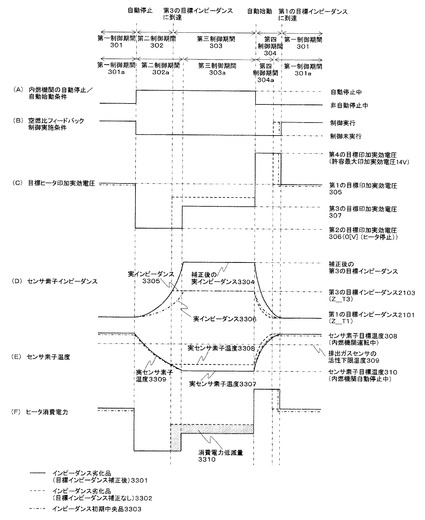
【図34】

【図35】
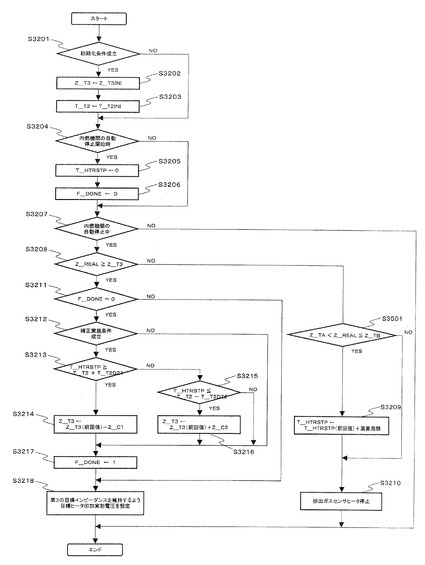
【図36】
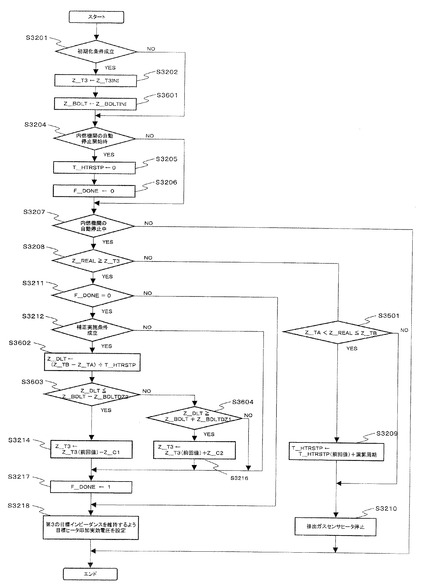
【図37】
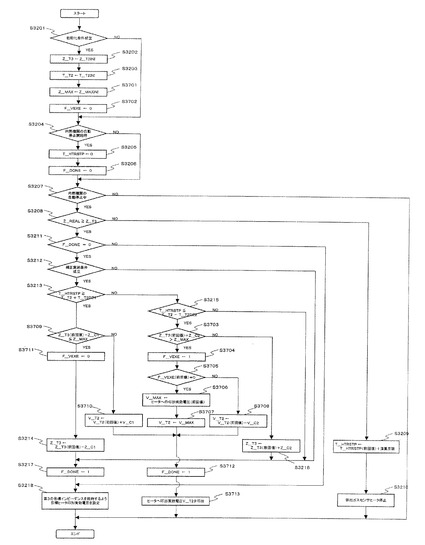
【図38】
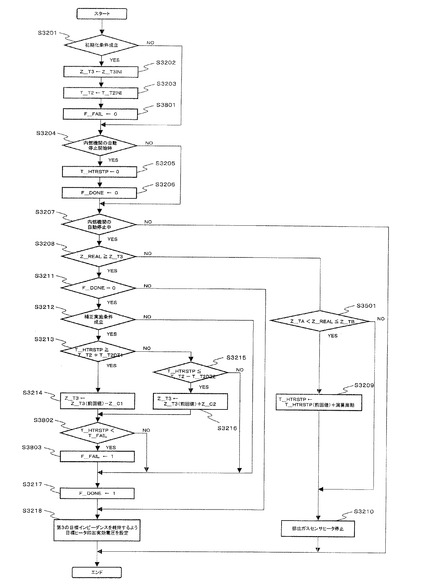
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【公開番号】特開2013−11583(P2013−11583A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−247247(P2011−247247)
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]