
制御装置および状態量取得装置
【課題】タービン発電プラントなど制御対象の状態量を取得する際に、低コストで信頼性の高い状態量を得られるようにする。
【解決手段】第1の状態量取得部110は、状態量測定値(ガスタービンの燃料のカロリー測定値)を取得する。また、推定部150は、第2の状態量取得部140の取得する状態量測定値(ガスタービンの燃料のカロリー測定値を含まない)に基づいて、状態量推定値(ガスタービンの燃料のカロリー推定値)を推定する。そして、健全性評価部130は、第1の状態量取得部110の取得する状態量測定値と、推定部150の推定する状態量推定値とを比較することにより、第1の状態量取得部110の取得する状態量測定値と、推定部150の推定する状態量推定値との健全性を評価する。
【解決手段】第1の状態量取得部110は、状態量測定値(ガスタービンの燃料のカロリー測定値)を取得する。また、推定部150は、第2の状態量取得部140の取得する状態量測定値(ガスタービンの燃料のカロリー測定値を含まない)に基づいて、状態量推定値(ガスタービンの燃料のカロリー推定値)を推定する。そして、健全性評価部130は、第1の状態量取得部110の取得する状態量測定値と、推定部150の推定する状態量推定値とを比較することにより、第1の状態量取得部110の取得する状態量測定値と、推定部150の推定する状態量推定値との健全性を評価する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、制御対象から取得する状態量に基づいて制御対象を制御する制御装置、および、状態量を取得する状態量取得装置に関する。
【背景技術】
【0002】
ガスタービンに供給される燃料ガスカロリーなどの状態量を測定する際、測定結果の信頼性を確保するための方法の1つに計測機器の多重化がある。計測機器の多重化においては、複数の計測機器を用いて1つの状態量を測定し、得られた状態量を計測機器間で比較することによって測定結果の信頼性を評価する。
【0003】
また、特許文献1には、ガスタービンの燃焼器に流入する燃料ガス流量やガスタービン発電出力等に基づいて燃料ガスカロリー演算を行う燃料ガスカロリー推定装置が示されている。
ここで、ガスタービンの燃料ガスカロリーを測定するカロリー計は、一般に高価である。そこで、特許文献1では、カロリー計に代えて燃料ガスカロリー推定装置を用いることで、コストを削減可能としている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−190633号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ガスタービンの燃料ガスカロリーを測定する際のカロリー計のように、高価な計測機器を多重化するとコストが増大してしまう。一方で、コストを削減するために多重化を行わないようにすると、測定結果の信頼性を確保できなくなる。例えば、多重化されていないカロリー計のカロリー測定値を用いてプラント制御を行う場合、カロリー測定値に誤差があっても検出されず、制御の精度が低下してしまうおそれがある。
【0006】
ここで、コスト削減のためには、特許文献1の燃料ガスカロリー推定装置のように、取得対象の状態量を測定する高価な計測機器に代えて、取得対象の状態量以外の状態量に基づいて取得対象の状態量を推定する推定装置を用いる方法が考えられる。
しかしながら、特許文献1に記載の方法では、状態量の測定値に代えて状態量の推定値を用いており、状態量の推定方法によっては信頼性の面で問題があった。
【0007】
本発明は、このような事情を考慮してなされたものであり、その目的は、取得対象の状態量を取得する際に、低コストで信頼性の高い状態量を得ることが可能な制御装置および状態量取得装置を供給することを目的とする。
【課題を解決するための手段】
【0008】
この発明は上述した課題を解決するためになされたもので、本発明の一態様による制御装置は、制御対象から取得する状態量に基づいて、制御対象を制御する制御装置であって、第1の検出手段から状態量として第1の状態量を取得する第1の状態量取得部と、第2の検出手段から状態量として第2の状態量を取得する第2の状態量取得部と、前記第2の状態量に基づいて、前記第1の状態量の推定値である第1の推定状態量を演算する推定部と、前記第1の状態量取得部または前記第2の状態量取得部の少なくとも一方で取得した状態量に対して遅れ補償する遅れ補償部と、前記第1の状態量取得部で取得した前記第1の状態量と、前記第2の状態量から前記推定部で推定した前記第1の推定状態量とを、前記遅れ補償部で遅れ補償した状態で比較する健全性評価部と、を備えることを特徴とする。
【0009】
また、本発明の一態様による制御装置は、上述の制御装置であって、前記第1の推定状態量に遅れを生じさせ、遅れを生じさせた前記第1の推定状態量と、前記第1の状態量との相関に基づいて遅れ評価を行い、補償量を決定する遅れ評価部を備え、前記遅れ補償部は、前記遅れ評価部が決定した補償量に基づいて遅れ補償を行う、ことを特徴とする。
【0010】
また、本発明の一態様による制御装置は、上述の制御装置であって、前記第1の推定状態量に基づいて前記制御対象の制御を行う制御部を備え、前記健全性評価部が、前記比較に基づいて、前記第1の状態量取得部で取得した前記第1の状態量と、前記推定部で推定した前記第1の推定状態量とが一致しないと判定すると、前記制御部は、制御対象に対して動作制限させる処理を行う、ことを特徴とする。
【0011】
また、本発明の一態様による制御装置は、上述の制御装置であって、前記第1の状態量取得部で取得した前記第1の状態量の大きさと、前記第2の状態量から前記推定部で推定した前記第1の推定状態量の大きさとを、前記遅れ補償部で遅れ補償した状態で比較して、前記推定部が推定する前記第1の推定状態量の大きさの補正量を決定するレベル調整部を備え、前記推定部は、前記レベル調整部が決定した補正量に従って、前記第1の推定状態量の大きさを補正する、ことを特徴とする。
【0012】
また、本発明の一態様による制御装置は、上述の制御装置であって、前記第2の検出手段は、前記第1の検出手段よりも高い応答性を有し、前記遅れ補償部は、前記第1の検出手段の応答遅れを補償する、ことを特徴とする。
【0013】
また、本発明の一態様による状態量取得装置は、第1の検出手段から状態量として第1の状態量を取得する第1の状態量取得部と、第2の検出手段から状態量として第2の状態量を取得する第2の状態量取得部と、前記第2の状態量に基づいて、前記第1の状態量の推定値である第1の推定状態量を演算する推定部と、前記第1の状態量取得部または前記第2の状態量取得部の少なくとも一方で取得した状態量に対して遅れ補償する遅れ補償部と、前記第1の状態量取得部で取得した前記第1の状態量と、前記第2の状態量から前記推定部で推定した前記第1の推定状態量とを、前記遅れ補償部で遅れ補償した状態で比較する健全性評価部と、を備えることを特徴とする。
【発明の効果】
【0014】
本発明によれば、低コストで信頼性の高い状態量を得ることが可能となる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施形態における制御装置が適用されるガスタービン発電プラントの概略構成を示す構成図である。
【図2】同実施形態における制御装置の概略構成を示す構成図である。
【図3】同実施形態において、遅れ補償部が遅れ補償した状態量の例を示すグラフである。
【図4】本発明の第2の実施形態における制御装置の概略構成を示す構成図である。
【図5】本発明の第3の実施形態における制御装置の概略構成を示す構成図である。
【図6】本発明の第4の実施形態における制御装置の概略構成を示す構成図である。
【発明を実施するための形態】
【0016】
<第1の実施形態>
以下、図面を参照して、本発明の実施の形態について説明する。以下では、ガスタービン発電プラントにおいて、ガスタービンに供給される燃料ガスカロリーを取得し、取得した燃料ガスカロリーに基づいてプラント制御を行う制御装置を例に説明するが、本発明の適用範囲はこれに限らず、制御対象の状態量を取得して制御対象を制御する様々な制御装置に適用可能である。例えば、ガスタービンの排ガスに含まれるNOx(窒素酸化物)量あるいはCO(一酸化炭素)量を取得してプラント制御を行う制御装置や、ガスタービン発電プラント以外の制御対象を制御する制御装置にも適用し得る。
【0017】
まず、図1を参照して、本発明の第1の実施形態における制御装置が取得対象とする状態量について説明する。
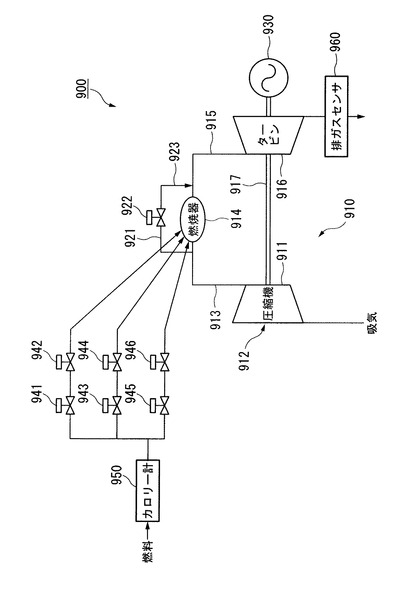
図1は、本発明の第1の実施形態における制御装置が適用されるガスタービン発電プラントの概略構成を示す構成図である。同図において、ガスタービン発電プラント900は、ガスタービン910と、発電機930と、メイン燃料流量制御弁941と、メイン燃料供給弁942と、トップハット燃料流量制御弁943と、トップハット燃料供給弁944と、パイロット燃料流量制御弁945と、パイロット燃料供給弁946と、カロリー計950と、排ガスセンサ960とを具備する。ガスタービン910は、圧縮機911と、圧縮空気導入管913と、燃焼器914と、燃焼ガス導入管915と、タービン916と、回転軸917と、バイパス空気導入管921と、バイパス弁922と、バイパス空気混合管923とを具備する。圧縮機911は、入口案内翼912を具備する。
【0018】
ガスタービン910は、発電機930と回転軸917にて結合されている。そして、ガスタービン910は、燃料(燃料ガス)の供給を受けて燃焼させて燃焼ガスを生成し、燃焼ガスを作動ガスとして回転駆動する。
圧縮機911は、外気を圧縮して圧縮空気を燃焼器914に供給する。入口案内翼912は、自らの角度を変えることにより、圧縮機911が吸入する外気量を調整する。圧縮空気導入管913は、圧縮機911と燃焼器914とを接続し、圧縮機911の生成する圧縮空気を燃焼器914に送出する。
【0019】
燃焼器914は、圧縮機911から供給される圧縮空気と燃料とを混合させて燃焼させることで燃焼ガスを生成し、生成した燃焼ガスをタービン916に供給する。燃焼ガス導入管915は、燃焼器914とタービン916とを接続し、燃焼器914の生成する燃焼ガスをタービン916に送出する。
タービン916は、燃焼器914から供給される燃焼ガスを作動ガスとして回転駆動する。
回転軸917は、圧縮機911とタービン916と発電機930とを結合し、タービン916が回転駆動して生成する回転力を、圧縮機911と発電機930とに伝達する。
【0020】
バイパス弁922は、その開度に応じて圧縮空気導入管913を流れる圧縮空気の一部を燃焼ガス導入管915にバイパスすることにより、燃焼器914に供給される圧縮空気量を調整する。バイパス空気導入管921は、圧縮空気導入管913とバイパス弁922とを接続する。バイパス空気混合管923は、バイパス弁922と燃焼ガス導入管915とを接続する。
【0021】
発電機930は、タービン916の生成する回転力によって回転し発電する。
メイン燃料供給弁942は遮断弁であり、燃焼器914へのメイン燃料の供給/遮断を行う。ここで、メイン燃料は、燃焼ガスを生成するために燃焼器914に供給される燃料であり、後述するトップハット燃料やパイロット燃料と区別してメイン燃料と称される。メイン燃料流量制御弁941は流量制御弁(流量調節弁)であり、燃焼器914に供給されるメイン燃料の流量を調節する。
【0022】
トップハット燃料供給弁944は遮断弁であり、燃焼器914へのトップハット燃料の供給/遮断を行う。ここで、トップハット燃料は、燃料混合気における燃料濃度の均一化を図るために燃焼器914に供給される燃料である。トップハット燃料流量制御弁943は流量制御弁であり、燃焼器914に供給されるトップハット燃料の流量を調節する。
パイロット燃料供給弁946は遮断弁であり、燃焼器914へのパイロット燃料の供給/遮断を行う。ここで、パイロット燃料は、ガスタービン910の起動時に、メイン燃料に先立って燃焼器914に供給される燃料である。パイロット燃料流量制御弁945は流量制御弁であり、燃焼器914に供給されるパイロット燃料の流量を調節する。
【0023】
カロリー計950は、燃焼器914に供給される燃料(メイン燃料、トップハット燃料およびパイロット燃料)のカロリーを測定する。
排ガスセンサ960は、タービン916から出力される排ガスの成分を測定する。特に、排ガスセンサ960は、排ガスのNOx濃度およびCO濃度を測定する。
【0024】
本実施形態における制御装置は、カロリー計950の測定する燃料ガスカロリーに基づいてガスタービン発電プラント900を制御する。例えば、カロリー計950の測定するカロリー(および他の測定値)に基づいて、メイン燃料流量制御弁941の開度や入口案内翼912の角度を制御することにより、発電機930の出力が所定の目標値となるようにする。
なお、本発明の適用範囲は、この燃料ガスカロリーに基づいてガスタービン発電プラント900を制御する制御装置に限らない。例えば、排ガスセンサ960の測定するNOx濃度に基づいて、NOx濃度が制限値を超えないようにガスタービン910の負荷を制御する制御装置など、他の制御装置にも適用し得る。
【0025】
次に、図2を参照して、制御装置の構成について説明する。
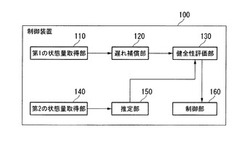
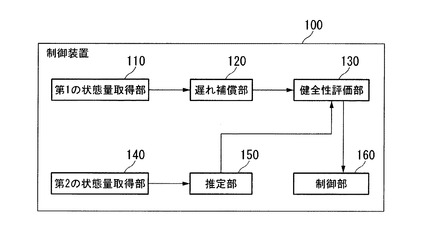
図2は、本発明の第1の実施形態における制御装置の概略構成を示す構成図である。同図において、制御装置100は、第1の状態量取得部110と、遅れ補償部120と、健全性評価部130と、第2の状態量取得部140と、推定部150と、制御部160とを具備する。
第1の状態量取得部110は、カロリー計950(図1)を備え、ガスタービン910に供給される燃料のカロリーを取得(測定)する。そして、第1の状態量取得部110は、取得したカロリー測定値を、遅れ補償部120に出力する。なお、第1の状態量取得部110の備えるカロリー計950は、第1の検出手段に相当し、第1の状態量取得部110の取得するカロリー測定値は、第1の状態量に相当する。
遅れ補償部120は、第1の状態量取得部110の取得するカロリー測定値に対する遅れ補償を行う。遅れ補償部120は、遅れ補償したカロリー測定値を、健全性評価部130に出力する。
【0026】
ここで、図3を参照して、遅れ補償部120の行う遅れ補償について説明する。
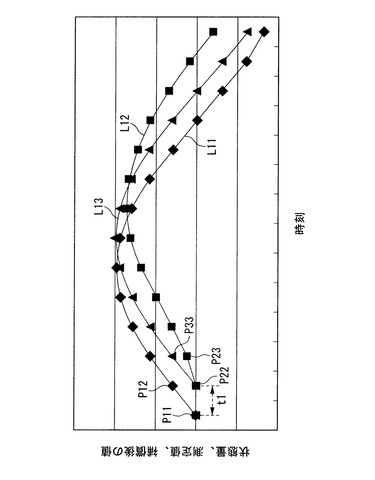
図3は、遅れ補償部120が遅れ補償した状態量の例を示すグラフである。同図の線L11は、ガスタービン910に供給される燃料のカロリー値(以下、同図の説明において「状態量」と称する)の例を示し、線L12は、第1の状態量取得部110の出力するカロリー測定値(以下、同図の説明において「測定値」と称する)の例を示し、線L13は、遅れ補償部120が遅れ補償したカロリー測定値(以下、同図の説明において「補償後値」と称する)の例を示す。
【0027】
ガスタービンの燃料のカロリー測定に用いられるカロリー計は、一般に応答遅れを有する。例えば、線L11の示す状態量が、点P11から点P12へと変化するのに対し、線L12の示す測定値は、無駄時間t1の後、点P22から点P23へと変化している。ここで、第1の状態量取得部110の有するカロリー計の応答遅れにより、点P22から点P23への変化は、点P11から点P12への変化よりも緩やかな変化となり、測定値を示す線L12は、状態量を示す線L11と異なる波形となっている。
そこで、遅れ補償部120は、測定値に対して、予め定められた遅れ時間で遅れ補償を行う。これにより、補償後値を示す線L13は、無駄時間t1を有するものの、状態量を示す線L11と同様の波形となっている。
【0028】
遅れ補償部120が遅れ補償を行う方法としては、様々な方法を用いることができる。以下では、測定値が一次遅れのみを有する(計測機器の特定が一次遅れのみを有する)場合に、遅れ補償部120が行う遅れ補償の一例を示すが、遅れ補償部120が行う遅れ補償はこれに限らない。
まず、状態量をu(k)とし、測定値をy(k)とする。ここで、kは時刻を意味する演算子である。上述のように測定値は一次遅れのみを有し測定値y(k)は、状態量u(k)を用いて式(1)のように表される。
【0029】
【数1】

【0030】
ここで、係数aは、一次遅れの時定数と、サンプリング周期(カロリー計による測定間隔)で定まる定数である。この式(1)をu(k)について解くと、式(2)のようになる。
【0031】
【数2】
【0032】
時刻kでは、時刻k+1における測定値y(k+1)は未だ得られていないので、式(2)の時刻演算子kを1時刻ずらしたk−1で置き換えて、式(3)の近似式を得る。
【0033】
【数3】
【0034】
サンプリング周期を適切に小さい周期とすることにより、状態量と類似する波形を示す補償後値u’(k)を得ることが出来る。
そこで、遅れ補償部120は、式(3)と、予め設定される定数aの値を予め記憶しておき、第1の状態量取得部110から出力される測定値y(k)および1時刻前の測定値y(k−1)を式(3)に代入して、補償後値u’(k)を算出する。
【0035】
図2に戻って、第2の状態量取得部140は、発電機930(図1)の出力を測定する電力計や、気温を測定する温度計や、ガスタービン910の回転数を測定する回転計や、ガスタービン910に供給される燃料の温度を測定する温度計や、ガスタービン910に供給される燃料の流量を測定する流量計などの計測機器を備え、これらの計測機器により、発電機出力や、気温や、ガスタービン回転数や、燃料温度や、燃料流量などの状態量を取得(測定)する。そして、第2の状態量取得部140は、取得した各状態量測定値を推定部150に出力する。なお、第2の状態量取得部140の備える計測機器は、第2の検出手段に相当し、第2の状態量取得部140の取得する状態量は、第2の状態量に相当する。第2の状態量取得部140の取得する状態量には、第1の状態量取得部110の取得する燃料のカロリーは含まれない。
【0036】
推定部150は、第2の状態量取得部140の取得する状態量に基づいて、ガスタービン910に供給される燃料のカロリー推定値を算出する。例えば、推定部150は、第2の状態量取得部140の取得する状態量と燃料のカロリーとの関係を示す線形モデル(線形関数)を予め記憶しておき、この線形モデルに、第2の状態量取得部140の取得する状態量を適用することにより、燃料のカロリー推定値を算出する。そして、推定部150は、算出したカロリー推定値を健全性評価部130に出力する。
【0037】
なお、推定部150が推定値を算出する方法は、線形モデルを用いる方法に限らない。例えば、推定部150が、非線形モデルまたはカルマンフィルタまたはニューラルネットなど、他の方法を用いて推定値を算出するようにしてもよい。
また、推定部150が推定に用いる状態量は、1つ以上であればよい。推定部150は、推定する状態量の種類、および、推定値に要求される精度に基づいて予め定められた種類の状態量を用いて、推定値の算出を行う。
【0038】
健全性評価部130は、遅れ補償部120が遅れ補償したカロリー測定値と、推定部150が算出したカロリー推定値とを比較し、両者が類似しているか否かを判定する。具体的には、健全性評価部130は、直近の一定時間(例えば直近10分間)におけるカロリー測定値とカロリー推定値との相関値を算出し、算出した相関値が予め定められた閾値以上のときに、両者が類似していると判定する。一方、相関値が閾値未満の場合は、健全性評価部130は、カロリー測定値とカロリー推定値とが類似していないと判定する。そして、健全性評価部130は、健全性評価結果と、遅れ補償部120が遅れ補償したカロリー測定値とを、制御部160に出力する。
なお、以下では、健全性評価部130が行う類似か否かの判定を「健全性評価」と称する。また、カロリー測定値とカロリー推定値とが類似することを、カロリー測定値とカロリー推定値とが「健全」であると称する。一方、カロリー測定値とカロリー推定値とが類似しないことを、カロリー測定値またはカロリー推定値が「不健全」であると称する。
【0039】
カロリー測定値とカロリー推定値とが健全と判定された場合、これらカロリー測定値およびカロリー推定値は正常(実際の状態量に近い)と考えられる。この点で、カロリー測定値およびカロリー推定値の信頼性が確保されている。
一方、カロリー測定値またはカロリー推定値が不健全であると判定された場合、いずれかの値が異常(実際の状態量と大きく異なる)と考えられる。この場合、後述するように、制御部160がガスタービン910(図1)を負荷降下(ランバック)あるいは停止(トリップ)させる等の処理を行うことが考えられる。
【0040】
なお、遅れ補償部120が遅れ補償したカロリー測定値に無駄時間が含まれ、カロリー測定値の位相がカロリー推定値の位相に対して遅れている場合、健全性評価部130が、カロリー推定値を予め定められた一定時間遅延させる位相合わせを行った後に、健全性評価を行うようにしてもよい。これにより正確に健全性評価を行うことができる。
また、測定対象の状態量や、推定部150の推定方法によっては、推定部150から出力される状態量推定値の位相が、遅れ補償部120から出力される状態量測定値の位相よりも遅れる場合が考えられる。この場合、健全性評価部130が、状態量測定値を予め定められた一定時間遅延させる位相合わせを行った後に、健全性評価を行うようにしてもよい。
また、上記では、直近の一定時間(例えば直近10分間)におけるカロリー測定値とカロリー推定値との相関値を用いて健全性を評価したが、カロリー測定値とカロリー推定値との差に閾値を設定して、閾値以内の差の場合を「健全」、閾値を超える場合を「不健全」としてもよい。また、直近の一定時間におけるカロリー測定値とカロリー推定値とのそれぞれの平均値について差を求めて閾値と比較してもよい。
【0041】
制御部160は、ガスタービン発電プラント900の制御を行う。特に、制御部160は、健全性評価結果が健全を示す場合は、カロリー測定値を用いてガスタービン910の負荷制御を行う。
一方、健全性評価結果が不健全を示す場合、カロリー測定値が異常である(実際の状態量と異なる)可能性がある。そこで、制御部160は、不健全時の処理として予め定められた処理を行う。例えば、ガスタービン910が高負荷で運転している場合、燃料のカロリー変動によってガスタービン910の燃焼振動が発生することが考えられる。そこで、制御部160は、ガスタービン910を動作制限させる処理を行うことによって、ガスタービン910を保護する。具体的には、制御部160は、ガスタービン910を負荷降下させることによって、燃焼振動を防止する。あるいは、制御部160が、ガスタービン910を停止させることによってガスタービン910を保護するようにしてもよい。
【0042】
このように、制御装置100は、測定対象の状態量を測定する第1の状態量取得部110と、他の状態量から測定対象の状態量を推定する推定部150とを具備し、健全性評価部130が状態量測定値と状態量推定値との健全性評価を行う。この健全性評価により、計測機器を多重化する方法と同様に、得られる状態量(本実施形態では、遅れ補償部120が遅れ補償したカロリー測定値)の信頼性を確保できる。また、測定対象の状態量を測定する計測機器(本実施形態ではカロリー計)を1つのみ用いて健全性評価を行うことができるので、当該計測機器が高価な場合に、当該計測機器を多重化する方法と比べて低コストで状態量を得ることができる。
また、遅れ補償部120が遅れ補償を行うことにより、計測機器が応答遅れを有する場合にも、状態量測定値と状態量推定値との健全性評価が可能であり、信頼性の高い状態量を得ることができる。
【0043】
<第2の実施形態>
制御装置100(図2)は、予め定められた遅れ(図3で説明した例では、予め定められた定数aの示す遅れ)に基づいて遅れ補償を行ったが、状態量測定値と状態量推定値との相関を取って遅れを評価するようにしてもよい。
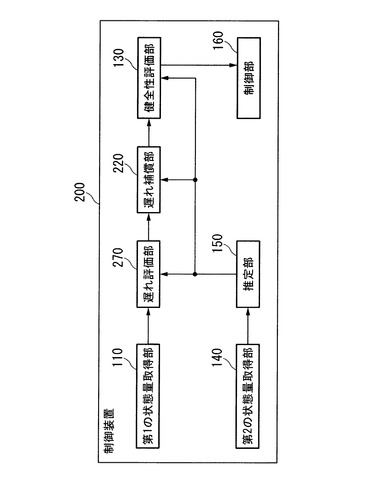
図4は、本発明の第2の実施形態における制御装置の概略構成を示す構成図である。同図において、制御装置200は、第1の状態量取得部110と、遅れ評価部270と、遅れ補償部220と、健全性評価部130と、第2の状態量取得部140と、推定部150と、制御部160とを具備する。同図において、図2の各部と同様の部分には同一の符号(110、130、140、150、160)を付し、説明を省略する。
【0044】
遅れ評価部270は、第1の状態量取得部110の出力するカロリー測定値と、推定部150の出力するカロリー推定値とに基づいて、カロリー測定値に含まれる遅れを評価する。
具体的には、遅れ評価部270は、推定部150に対して、予め定められた複数の遅れを適用して、異なる遅れを有するカロリー推定値を生成し、それぞれのカロリー推定値とカロリー測定値との相関を取る。そして、相関値が最も大きいカロリー推定値に適用した遅れに基づいて、カロリー測定値の有する遅れを評価する。そして、遅れ評価部270は、評価した遅れに基づいて、遅れ補償部220の行う遅れ補償の補償量を決定し、決定した補償量を遅れ補償部220に出力する。また、遅れ評価部270は、第1の状態量取得部110からカロリー測定値が出力される毎に、当該カロリー測定値を遅れ補償部220に出力(転送)する。
【0045】
例えば、遅れ評価部270は、式(1)のu(k)にカロリー推定値を代入して、一次遅れを有するカロリー推定値y(k+1)を算出する。その際、遅れ評価部270は、定数aの値を複数記憶しておき、それぞれの定数aの値について、一次遅れを有するカロリー推定値を算出する。
以下では、遅れ評価部270が、定数aの値として値a1とa2とを記憶しておき、これらの値を定数aに適用した式(4)および式(5)のそれぞれについて、一次遅れを有するカロリー推定値y1(k+1)とy2(k+1)とを算出する場合について説明するが、遅れの種類は一次遅れに限らないし、遅れ評価部270が算出する、遅れを有するカロリー推定値の数は、3つ以上であってもよい。
【0046】
【数4】
【0047】
まず、推定部150は、第1の状態量取得部110のサンプリング周期と同じサンプリング周期で、カロリー推定値を算出して遅れ評価部270に出力する。
そして、遅れ評価部270は、推定部150からカロリー推定値が出力される毎に、カロリー推定値を、式(4)のu(k)と、式(5)のu(k)とに代入して、定数aの値がa1の場合の、遅れを有するカロリー推定値y1(k+1)と、定数aの値がa2の場合の、遅れを有するカロリー推定値y2(k+1)とを算出する。
次に、遅れ評価部270は、直近の一定時間(例えば直近10分間)について、遅れを有するカロリー推定値y1(k+1)とカロリー測定値との相関値と、遅れを有するカロリー推定値y2(k+1)とカロリー測定値との相関値とを算出する。
そして、遅れ評価部270は、定数aの値を、値a1とa2とのうち、相関値が大きいほうの値に決定し、決定した値を、補償量として遅れ補償部220に出力する。
【0048】
遅れ補償部220は、遅れ評価部270から出力される補償量を用いて、カロリー測定値の遅れ補償を行う。そして、遅れ補償部220は、遅れ補償したカロリー測定値を健全性評価部130に出力する。また、遅れ補償部220は、推定部150からカロリー推定値が出力される毎に、カロリー推定値を健全性評価部130に出力する。
例えば、遅れ補償部220は、式(3)を記憶する際、この式(3)に含まれる「a」を定数を表すパラメータとして記憶しておく。そして、定数aの値として値a1が遅れ評価部270から出力されると、式(3)の定数パラメータaに値a1を適用(パラメータに代入)して式(6)を生成する。
【0049】
【数5】
【0050】
そして、遅れ補償部220は、遅れ評価部270を介して第1の状態量取得部110から出力されるカロリー測定値を式(6)に代入して、遅れ補償したカロリー測定値u’(k)を算出する。
遅れ補償部220は、遅れ補償したカロリー測定値を健全性評価部130に出力する。
【0051】
以上のように、遅れ評価部270が遅れ補償量を決定し、決定された遅れ補償量に従って遅れ補償部220が遅れ補償を行うので、遅れ補償部220が遅れ補償を行う補償量を予め一意に定めておく必要が無い。これにより、制御装置200を設計する際の設計者の負荷を軽減できる。
また、第1の状態量取得部110の取得するカロリー測定値の有する遅れ量が変化する場合にも、遅れ補償部220は、より適切な補償量を用いて遅れ補償を行うことが出来る。
例えば、カロリー計でガスタービンの燃料のカロリーを測定する際、カロリー計の応答遅れは一定であっても、燃料の速度が変化することによって、カロリー測定値の有する遅れ量が変化する場合がある。このようにカロリー測定値の遅れ量が変化する場合にも、遅れ補償部220は、より適切な補償量を用いて遅れ補償を行うことが出来る。すなわち、より信頼性の高い状態量を得ることができる。
【0052】
なお、遅れ評価部270が行う遅れ評価の方法は、上述した状態量測定値と状態量推定値とを比較する方法に限らない。例えば、過去の遅れ評価に従って遅れ評価するなど、他の方法によって遅れ評価を行うようにしてもよい。
例えば、ガスタービンは、停止中に本体温度が低下し、長時間停止した後に再起動すると、定格負荷に到達した後もガスタービン本体温度が上昇し続けることがある。このガスタービン本体温度の上昇により、燃焼器内での燃焼状態が変化して定格負荷での運転中において排ガス中のNOx濃度やCO濃度が変化することがある。このような変化によって排ガスセンサの測定値の遅れ量が変化する場合、遅れ評価部270が、定格負荷での運転中におけるタービン本体温度と遅れ量との関係を予め記憶しておき、タービン本体温度に基づいて、遅れ量(遅れ補償量)を決定するようにしてもよい。
【0053】
また、燃料タンクからガスタービンの燃料(ガス)の供給を受ける場合、燃料中の重い成分が下に溜まる。これにより、燃料タンクが満杯の状態から変化するにつれて燃料のカロリーが変化する場合がある。このような変化に伴ってカロリー計の測定値の遅れ量が変化する場合、遅れ評価部270が、燃料タンク中の燃料残量にと遅れ量との関係を予め記憶しておき、燃料残量に基づいて、遅れ量(遅れ補償量)を決定するようにしてもよい。
あるいは、遅れ量の変化が緩やかな場合、遅れ評価部270が、遅れ量の変化を比較的低次(例えば2次または3次)のモデルに当てはめて遅れ量を予測し、予測した遅れ量に応じて遅れ補償量を決定するようにしてもよい。
また、上記では一例として定数aの値を遅れとして記載したが、第1の状態量取得部110の設置場所によっては、図3に示す無駄時間がサンプリング周期より長い場合もある。このような場合は、無駄時間を変えて相関値を評価し、相関値の高い無駄時間も出力するようにしてもよい。
【0054】
<第3の実施形態>
制御装置100(図2)や制御装置200(図4)において、制御部160は、第1の状態量取得部110の測定するカロリー測定値を用いてプラント制御を行ったが、制御部が、推定部150の推定するカロリー推定値を用いてプラント制御を行うようにしてもよい。
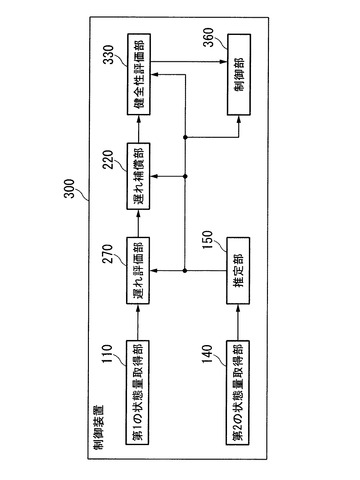
図5は、本発明の第3の実施形態における制御装置の概略構成を示す構成図である。同図において、制御装置300は、第1の状態量取得部110と、遅れ評価部270と、遅れ補償部220と、健全性評価部330と、第2の状態量取得部140と、推定部150と、制御部360とを具備する。同図において、図4の各部と同様の部分には同一の符号(110、140、150、220、270)を付し、説明を省略する。
【0055】
健全性評価部330は、健全性評価部130(図4)と同様、第1の状態量取得部110の測定するカロリー測定値と、推定部150の推定するカロリー推定値との健全性評価を行う。一方、健全性評価部330は、遅れ補償部220が遅れ補償したカロリー測定値を制御部360に出力しない点で、健全性評価部130と異なる。
制御部360は、遅れ補償部220が遅れ評価したカロリー測定値ではなく、推定部150が推定したカロリー推定値に基づいて制御を行う点で、制御部160(図4)と異なる。一方、制御部360は、制御部160と同様、健全性評価部330から出力される健全性評価結果が不健全を示す場合は、ガスタービン910(図1)を動作制限する処理を行うことによってガスタービン910を保護する。
【0056】
このように、制御部360は、推定部150が推定するカロリー推定値を用いてプラント制御を行うので、遅れ補償したカロリー測定値を遅れ補償部220が出力するタイミングが、推定部150がカロリー推定値を出力するタイミングよりも遅い場合に、現在の状態量(燃料のカロリー量)により近い値(カロリー推定値)を用いて、より適切にプラント制御を行うことが出来る。
【0057】
例えば、遅れ補償部120(図2)や遅れ補償部220(図4)が遅れ補償を行う際、遅れの次数が高い場合や無駄時間が長い場合など、遅れ補償したカロリー測定値を得られるまでに時間がかかる場合がある。また、遅れ評価部270(図4)が遅れ評価を行う際、複数の遅れのカロリー推定値のそれぞれについて、カロリー測定値との相関を取る必要がある。サンプリング数によってはこの相関を取る際の演算量が多くなり、処理に時間を要する可能性がある。そして、遅れ評価部270の遅れ評価に時間を要すると、遅れ評価部270が遅れ補償部220に補償量を出力するタイミングが遅くなり、遅れ補償部220が遅れ補償したカロリー測定値を出力するタイミングが遅くなる。
このような場合にも、制御部360は、カロリー推定値を用いて、より適切にプラント制御を行うことが出来る。この点で、制御装置300は、より信頼性の高い状態量を得ることができる。
【0058】
また、健全性評価部330から出力される健全性評価結果が不健全を示す場合は、制御部360が、ガスタービン910を動作制限する処理を行う点で、制御装置300の取得する状態量(制御部360がプラント制御に用いるカロリー推定値)の信頼性を確保できる。この点でも、制御装置300は、より信頼性の高い状態量を得ることができる。
【0059】
<第4の実施形態>
経年変化によるガスタービン910(図1)の性能低下など、第2の状態量取得部140の測定する状態量(例えば、発電機出力や、気温や、ガスタービン回転数や、燃料温度や、燃料流量)と、推定部150が推定すべき状態量(例えば、ガスタービン910に供給される燃料のカロリー)の実際の値との関係が、時間の経過に伴って変化する場合がある。この場合に、推定部が、状態量推定値の大きさを補正するようにしてもよい。
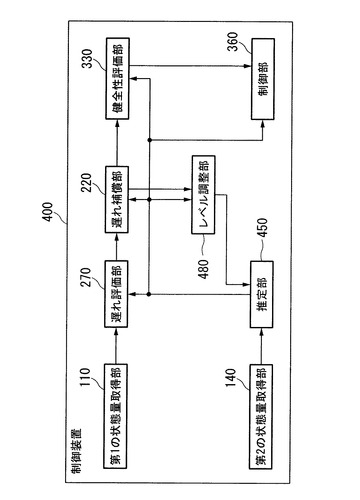
図6は、本発明の第4の実施形態における制御装置の概略構成を示す構成図である。同図において、制御装置400は、第1の状態量取得部110と、遅れ評価部270と、遅れ補償部220と、健全性評価部330と、第2の状態量取得部140と、推定部450と、制御部360と、レベル調整部480とを具備する。同図において、図5の各部と同様の部分には同一の符号(110、140、220、270、330、360)を付し、説明を省略する。
【0060】
レベル調整部480は、遅れ補償部220が遅れ補償したカロリー測定値と、推定部450が推定したカロリー推定値とを比較して、推定部450のカロリー推定値が適切か否かを判定し、不適切であると判定した場合は、カロリー推定値の補正量を決定して推定部450に出力する。例えば、レベル調整部480は、遅れ補償部220が遅れ補償したカロリー測定値と、カロリー推定値との差の大きさ(の、一定時間における平均値)が予め定められた閾値よりも大きいと判定した場合に、推定部450のカロリー推定値が不適切であると判定し、遅れ補償部220が遅れ補償したカロリー測定値を、カロリー推定値で除算した比率(の、一定時間における平均値)を補正量として推定部450に出力する。
推定部450は、レベル調整部480から出力される補正量に基づいて、状態量推定値の大きさを補正する。例えば、推定部450は、レベル調整部480から出力される、遅れ補償部220が遅れ補償したカロリー測定値を、カロリー推定値で除算した比率をカロリー推定値に乗算することによって、カロリー推定値の大きさをカロリー測定値の大きさに合わせ、この大きさを合わせたカロリー推定値を出力する。
【0061】
例えば、ガスタービン910(図1)において、圧縮機911内部の図示しない翼に埃が付着し、圧縮機911の吸気効率が低下することにより、タービン910の出力が低下する。また、ガスタービン910内部の図示しないシールが経年劣化して空気の漏れが生じると、タービン910の出力が低下する。
このように、タービン910の出力が低下すると、出力低下前との比較において、より高いカロリーの燃料の供給を受けても、同等のタービン出力となる。従って、推定部450がタービン出力等から燃料のカロリーを逆算している場合、タービン出力低下前と同様の計算を行うと、カロリー推定値が低く出てしまう(発電効率が実際の効率よりも高いように計算してしまう)。
そこで、推定部450は、レベル調整部480から出力される補正量に基づいて、大きさを補正したカロリー推定値を出力する。これにより、推定部450は、より正確なカロリー推定値を出力できる。
【0062】
このように、推定部450は、レベル調整部480から出力される補正量に基づいて、大きさを補正したカロリー推定値を出力することで、より正確なカロリー推定値を出力する。この点で、制御装置400は、より信頼性の高い状態量を得ることができる。そして、制御部360は、この信頼性の高い状態量(大きさを補正したカロリー推定値)を用いてプラント制御を行うことで、より適切に制御を行うことができる。
また、健全性評価部330は、大きさを補正したカロリー推定値を用いて健全性評価を行うことで、より正確に健全性評価を行うことができる。この点でも、制御装置400は、より信頼性の高い状態量を得ることができる。
【0063】
なお、以上では、本発明を制御装置に適用した場合について説明したが、本発明の適用範囲は制御装置に限らない。例えば、タービンの燃料のカロリー値を測定して運転員に表示する測定装置にも本発明を適用し得る。
【0064】
なお、制御装置100、200、300または400の全部または一部の機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより各部の処理を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含むものとする。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであってもよい。
【0065】
以上、本発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計変更等も含まれる。
【符号の説明】
【0066】
100、200、300、400 制御装置
110 状態量取得部
120、220 遅れ補償部
130、330 健全性評価部
140 状態量取得部
150、450 推定部
160、360 制御部
270 遅れ評価部
480 レベル調整部
【技術分野】
【0001】
本発明は、制御対象から取得する状態量に基づいて制御対象を制御する制御装置、および、状態量を取得する状態量取得装置に関する。
【背景技術】
【0002】
ガスタービンに供給される燃料ガスカロリーなどの状態量を測定する際、測定結果の信頼性を確保するための方法の1つに計測機器の多重化がある。計測機器の多重化においては、複数の計測機器を用いて1つの状態量を測定し、得られた状態量を計測機器間で比較することによって測定結果の信頼性を評価する。
【0003】
また、特許文献1には、ガスタービンの燃焼器に流入する燃料ガス流量やガスタービン発電出力等に基づいて燃料ガスカロリー演算を行う燃料ガスカロリー推定装置が示されている。
ここで、ガスタービンの燃料ガスカロリーを測定するカロリー計は、一般に高価である。そこで、特許文献1では、カロリー計に代えて燃料ガスカロリー推定装置を用いることで、コストを削減可能としている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−190633号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ガスタービンの燃料ガスカロリーを測定する際のカロリー計のように、高価な計測機器を多重化するとコストが増大してしまう。一方で、コストを削減するために多重化を行わないようにすると、測定結果の信頼性を確保できなくなる。例えば、多重化されていないカロリー計のカロリー測定値を用いてプラント制御を行う場合、カロリー測定値に誤差があっても検出されず、制御の精度が低下してしまうおそれがある。
【0006】
ここで、コスト削減のためには、特許文献1の燃料ガスカロリー推定装置のように、取得対象の状態量を測定する高価な計測機器に代えて、取得対象の状態量以外の状態量に基づいて取得対象の状態量を推定する推定装置を用いる方法が考えられる。
しかしながら、特許文献1に記載の方法では、状態量の測定値に代えて状態量の推定値を用いており、状態量の推定方法によっては信頼性の面で問題があった。
【0007】
本発明は、このような事情を考慮してなされたものであり、その目的は、取得対象の状態量を取得する際に、低コストで信頼性の高い状態量を得ることが可能な制御装置および状態量取得装置を供給することを目的とする。
【課題を解決するための手段】
【0008】
この発明は上述した課題を解決するためになされたもので、本発明の一態様による制御装置は、制御対象から取得する状態量に基づいて、制御対象を制御する制御装置であって、第1の検出手段から状態量として第1の状態量を取得する第1の状態量取得部と、第2の検出手段から状態量として第2の状態量を取得する第2の状態量取得部と、前記第2の状態量に基づいて、前記第1の状態量の推定値である第1の推定状態量を演算する推定部と、前記第1の状態量取得部または前記第2の状態量取得部の少なくとも一方で取得した状態量に対して遅れ補償する遅れ補償部と、前記第1の状態量取得部で取得した前記第1の状態量と、前記第2の状態量から前記推定部で推定した前記第1の推定状態量とを、前記遅れ補償部で遅れ補償した状態で比較する健全性評価部と、を備えることを特徴とする。
【0009】
また、本発明の一態様による制御装置は、上述の制御装置であって、前記第1の推定状態量に遅れを生じさせ、遅れを生じさせた前記第1の推定状態量と、前記第1の状態量との相関に基づいて遅れ評価を行い、補償量を決定する遅れ評価部を備え、前記遅れ補償部は、前記遅れ評価部が決定した補償量に基づいて遅れ補償を行う、ことを特徴とする。
【0010】
また、本発明の一態様による制御装置は、上述の制御装置であって、前記第1の推定状態量に基づいて前記制御対象の制御を行う制御部を備え、前記健全性評価部が、前記比較に基づいて、前記第1の状態量取得部で取得した前記第1の状態量と、前記推定部で推定した前記第1の推定状態量とが一致しないと判定すると、前記制御部は、制御対象に対して動作制限させる処理を行う、ことを特徴とする。
【0011】
また、本発明の一態様による制御装置は、上述の制御装置であって、前記第1の状態量取得部で取得した前記第1の状態量の大きさと、前記第2の状態量から前記推定部で推定した前記第1の推定状態量の大きさとを、前記遅れ補償部で遅れ補償した状態で比較して、前記推定部が推定する前記第1の推定状態量の大きさの補正量を決定するレベル調整部を備え、前記推定部は、前記レベル調整部が決定した補正量に従って、前記第1の推定状態量の大きさを補正する、ことを特徴とする。
【0012】
また、本発明の一態様による制御装置は、上述の制御装置であって、前記第2の検出手段は、前記第1の検出手段よりも高い応答性を有し、前記遅れ補償部は、前記第1の検出手段の応答遅れを補償する、ことを特徴とする。
【0013】
また、本発明の一態様による状態量取得装置は、第1の検出手段から状態量として第1の状態量を取得する第1の状態量取得部と、第2の検出手段から状態量として第2の状態量を取得する第2の状態量取得部と、前記第2の状態量に基づいて、前記第1の状態量の推定値である第1の推定状態量を演算する推定部と、前記第1の状態量取得部または前記第2の状態量取得部の少なくとも一方で取得した状態量に対して遅れ補償する遅れ補償部と、前記第1の状態量取得部で取得した前記第1の状態量と、前記第2の状態量から前記推定部で推定した前記第1の推定状態量とを、前記遅れ補償部で遅れ補償した状態で比較する健全性評価部と、を備えることを特徴とする。
【発明の効果】
【0014】
本発明によれば、低コストで信頼性の高い状態量を得ることが可能となる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施形態における制御装置が適用されるガスタービン発電プラントの概略構成を示す構成図である。
【図2】同実施形態における制御装置の概略構成を示す構成図である。
【図3】同実施形態において、遅れ補償部が遅れ補償した状態量の例を示すグラフである。
【図4】本発明の第2の実施形態における制御装置の概略構成を示す構成図である。
【図5】本発明の第3の実施形態における制御装置の概略構成を示す構成図である。
【図6】本発明の第4の実施形態における制御装置の概略構成を示す構成図である。
【発明を実施するための形態】
【0016】
<第1の実施形態>
以下、図面を参照して、本発明の実施の形態について説明する。以下では、ガスタービン発電プラントにおいて、ガスタービンに供給される燃料ガスカロリーを取得し、取得した燃料ガスカロリーに基づいてプラント制御を行う制御装置を例に説明するが、本発明の適用範囲はこれに限らず、制御対象の状態量を取得して制御対象を制御する様々な制御装置に適用可能である。例えば、ガスタービンの排ガスに含まれるNOx(窒素酸化物)量あるいはCO(一酸化炭素)量を取得してプラント制御を行う制御装置や、ガスタービン発電プラント以外の制御対象を制御する制御装置にも適用し得る。
【0017】
まず、図1を参照して、本発明の第1の実施形態における制御装置が取得対象とする状態量について説明する。
図1は、本発明の第1の実施形態における制御装置が適用されるガスタービン発電プラントの概略構成を示す構成図である。同図において、ガスタービン発電プラント900は、ガスタービン910と、発電機930と、メイン燃料流量制御弁941と、メイン燃料供給弁942と、トップハット燃料流量制御弁943と、トップハット燃料供給弁944と、パイロット燃料流量制御弁945と、パイロット燃料供給弁946と、カロリー計950と、排ガスセンサ960とを具備する。ガスタービン910は、圧縮機911と、圧縮空気導入管913と、燃焼器914と、燃焼ガス導入管915と、タービン916と、回転軸917と、バイパス空気導入管921と、バイパス弁922と、バイパス空気混合管923とを具備する。圧縮機911は、入口案内翼912を具備する。
【0018】
ガスタービン910は、発電機930と回転軸917にて結合されている。そして、ガスタービン910は、燃料(燃料ガス)の供給を受けて燃焼させて燃焼ガスを生成し、燃焼ガスを作動ガスとして回転駆動する。
圧縮機911は、外気を圧縮して圧縮空気を燃焼器914に供給する。入口案内翼912は、自らの角度を変えることにより、圧縮機911が吸入する外気量を調整する。圧縮空気導入管913は、圧縮機911と燃焼器914とを接続し、圧縮機911の生成する圧縮空気を燃焼器914に送出する。
【0019】
燃焼器914は、圧縮機911から供給される圧縮空気と燃料とを混合させて燃焼させることで燃焼ガスを生成し、生成した燃焼ガスをタービン916に供給する。燃焼ガス導入管915は、燃焼器914とタービン916とを接続し、燃焼器914の生成する燃焼ガスをタービン916に送出する。
タービン916は、燃焼器914から供給される燃焼ガスを作動ガスとして回転駆動する。
回転軸917は、圧縮機911とタービン916と発電機930とを結合し、タービン916が回転駆動して生成する回転力を、圧縮機911と発電機930とに伝達する。
【0020】
バイパス弁922は、その開度に応じて圧縮空気導入管913を流れる圧縮空気の一部を燃焼ガス導入管915にバイパスすることにより、燃焼器914に供給される圧縮空気量を調整する。バイパス空気導入管921は、圧縮空気導入管913とバイパス弁922とを接続する。バイパス空気混合管923は、バイパス弁922と燃焼ガス導入管915とを接続する。
【0021】
発電機930は、タービン916の生成する回転力によって回転し発電する。
メイン燃料供給弁942は遮断弁であり、燃焼器914へのメイン燃料の供給/遮断を行う。ここで、メイン燃料は、燃焼ガスを生成するために燃焼器914に供給される燃料であり、後述するトップハット燃料やパイロット燃料と区別してメイン燃料と称される。メイン燃料流量制御弁941は流量制御弁(流量調節弁)であり、燃焼器914に供給されるメイン燃料の流量を調節する。
【0022】
トップハット燃料供給弁944は遮断弁であり、燃焼器914へのトップハット燃料の供給/遮断を行う。ここで、トップハット燃料は、燃料混合気における燃料濃度の均一化を図るために燃焼器914に供給される燃料である。トップハット燃料流量制御弁943は流量制御弁であり、燃焼器914に供給されるトップハット燃料の流量を調節する。
パイロット燃料供給弁946は遮断弁であり、燃焼器914へのパイロット燃料の供給/遮断を行う。ここで、パイロット燃料は、ガスタービン910の起動時に、メイン燃料に先立って燃焼器914に供給される燃料である。パイロット燃料流量制御弁945は流量制御弁であり、燃焼器914に供給されるパイロット燃料の流量を調節する。
【0023】
カロリー計950は、燃焼器914に供給される燃料(メイン燃料、トップハット燃料およびパイロット燃料)のカロリーを測定する。
排ガスセンサ960は、タービン916から出力される排ガスの成分を測定する。特に、排ガスセンサ960は、排ガスのNOx濃度およびCO濃度を測定する。
【0024】
本実施形態における制御装置は、カロリー計950の測定する燃料ガスカロリーに基づいてガスタービン発電プラント900を制御する。例えば、カロリー計950の測定するカロリー(および他の測定値)に基づいて、メイン燃料流量制御弁941の開度や入口案内翼912の角度を制御することにより、発電機930の出力が所定の目標値となるようにする。
なお、本発明の適用範囲は、この燃料ガスカロリーに基づいてガスタービン発電プラント900を制御する制御装置に限らない。例えば、排ガスセンサ960の測定するNOx濃度に基づいて、NOx濃度が制限値を超えないようにガスタービン910の負荷を制御する制御装置など、他の制御装置にも適用し得る。
【0025】
次に、図2を参照して、制御装置の構成について説明する。
図2は、本発明の第1の実施形態における制御装置の概略構成を示す構成図である。同図において、制御装置100は、第1の状態量取得部110と、遅れ補償部120と、健全性評価部130と、第2の状態量取得部140と、推定部150と、制御部160とを具備する。
第1の状態量取得部110は、カロリー計950(図1)を備え、ガスタービン910に供給される燃料のカロリーを取得(測定)する。そして、第1の状態量取得部110は、取得したカロリー測定値を、遅れ補償部120に出力する。なお、第1の状態量取得部110の備えるカロリー計950は、第1の検出手段に相当し、第1の状態量取得部110の取得するカロリー測定値は、第1の状態量に相当する。
遅れ補償部120は、第1の状態量取得部110の取得するカロリー測定値に対する遅れ補償を行う。遅れ補償部120は、遅れ補償したカロリー測定値を、健全性評価部130に出力する。
【0026】
ここで、図3を参照して、遅れ補償部120の行う遅れ補償について説明する。
図3は、遅れ補償部120が遅れ補償した状態量の例を示すグラフである。同図の線L11は、ガスタービン910に供給される燃料のカロリー値(以下、同図の説明において「状態量」と称する)の例を示し、線L12は、第1の状態量取得部110の出力するカロリー測定値(以下、同図の説明において「測定値」と称する)の例を示し、線L13は、遅れ補償部120が遅れ補償したカロリー測定値(以下、同図の説明において「補償後値」と称する)の例を示す。
【0027】
ガスタービンの燃料のカロリー測定に用いられるカロリー計は、一般に応答遅れを有する。例えば、線L11の示す状態量が、点P11から点P12へと変化するのに対し、線L12の示す測定値は、無駄時間t1の後、点P22から点P23へと変化している。ここで、第1の状態量取得部110の有するカロリー計の応答遅れにより、点P22から点P23への変化は、点P11から点P12への変化よりも緩やかな変化となり、測定値を示す線L12は、状態量を示す線L11と異なる波形となっている。
そこで、遅れ補償部120は、測定値に対して、予め定められた遅れ時間で遅れ補償を行う。これにより、補償後値を示す線L13は、無駄時間t1を有するものの、状態量を示す線L11と同様の波形となっている。
【0028】
遅れ補償部120が遅れ補償を行う方法としては、様々な方法を用いることができる。以下では、測定値が一次遅れのみを有する(計測機器の特定が一次遅れのみを有する)場合に、遅れ補償部120が行う遅れ補償の一例を示すが、遅れ補償部120が行う遅れ補償はこれに限らない。
まず、状態量をu(k)とし、測定値をy(k)とする。ここで、kは時刻を意味する演算子である。上述のように測定値は一次遅れのみを有し測定値y(k)は、状態量u(k)を用いて式(1)のように表される。
【0029】
【数1】
【0030】
ここで、係数aは、一次遅れの時定数と、サンプリング周期(カロリー計による測定間隔)で定まる定数である。この式(1)をu(k)について解くと、式(2)のようになる。
【0031】
【数2】
【0032】
時刻kでは、時刻k+1における測定値y(k+1)は未だ得られていないので、式(2)の時刻演算子kを1時刻ずらしたk−1で置き換えて、式(3)の近似式を得る。
【0033】
【数3】
【0034】
サンプリング周期を適切に小さい周期とすることにより、状態量と類似する波形を示す補償後値u’(k)を得ることが出来る。
そこで、遅れ補償部120は、式(3)と、予め設定される定数aの値を予め記憶しておき、第1の状態量取得部110から出力される測定値y(k)および1時刻前の測定値y(k−1)を式(3)に代入して、補償後値u’(k)を算出する。
【0035】
図2に戻って、第2の状態量取得部140は、発電機930(図1)の出力を測定する電力計や、気温を測定する温度計や、ガスタービン910の回転数を測定する回転計や、ガスタービン910に供給される燃料の温度を測定する温度計や、ガスタービン910に供給される燃料の流量を測定する流量計などの計測機器を備え、これらの計測機器により、発電機出力や、気温や、ガスタービン回転数や、燃料温度や、燃料流量などの状態量を取得(測定)する。そして、第2の状態量取得部140は、取得した各状態量測定値を推定部150に出力する。なお、第2の状態量取得部140の備える計測機器は、第2の検出手段に相当し、第2の状態量取得部140の取得する状態量は、第2の状態量に相当する。第2の状態量取得部140の取得する状態量には、第1の状態量取得部110の取得する燃料のカロリーは含まれない。
【0036】
推定部150は、第2の状態量取得部140の取得する状態量に基づいて、ガスタービン910に供給される燃料のカロリー推定値を算出する。例えば、推定部150は、第2の状態量取得部140の取得する状態量と燃料のカロリーとの関係を示す線形モデル(線形関数)を予め記憶しておき、この線形モデルに、第2の状態量取得部140の取得する状態量を適用することにより、燃料のカロリー推定値を算出する。そして、推定部150は、算出したカロリー推定値を健全性評価部130に出力する。
【0037】
なお、推定部150が推定値を算出する方法は、線形モデルを用いる方法に限らない。例えば、推定部150が、非線形モデルまたはカルマンフィルタまたはニューラルネットなど、他の方法を用いて推定値を算出するようにしてもよい。
また、推定部150が推定に用いる状態量は、1つ以上であればよい。推定部150は、推定する状態量の種類、および、推定値に要求される精度に基づいて予め定められた種類の状態量を用いて、推定値の算出を行う。
【0038】
健全性評価部130は、遅れ補償部120が遅れ補償したカロリー測定値と、推定部150が算出したカロリー推定値とを比較し、両者が類似しているか否かを判定する。具体的には、健全性評価部130は、直近の一定時間(例えば直近10分間)におけるカロリー測定値とカロリー推定値との相関値を算出し、算出した相関値が予め定められた閾値以上のときに、両者が類似していると判定する。一方、相関値が閾値未満の場合は、健全性評価部130は、カロリー測定値とカロリー推定値とが類似していないと判定する。そして、健全性評価部130は、健全性評価結果と、遅れ補償部120が遅れ補償したカロリー測定値とを、制御部160に出力する。
なお、以下では、健全性評価部130が行う類似か否かの判定を「健全性評価」と称する。また、カロリー測定値とカロリー推定値とが類似することを、カロリー測定値とカロリー推定値とが「健全」であると称する。一方、カロリー測定値とカロリー推定値とが類似しないことを、カロリー測定値またはカロリー推定値が「不健全」であると称する。
【0039】
カロリー測定値とカロリー推定値とが健全と判定された場合、これらカロリー測定値およびカロリー推定値は正常(実際の状態量に近い)と考えられる。この点で、カロリー測定値およびカロリー推定値の信頼性が確保されている。
一方、カロリー測定値またはカロリー推定値が不健全であると判定された場合、いずれかの値が異常(実際の状態量と大きく異なる)と考えられる。この場合、後述するように、制御部160がガスタービン910(図1)を負荷降下(ランバック)あるいは停止(トリップ)させる等の処理を行うことが考えられる。
【0040】
なお、遅れ補償部120が遅れ補償したカロリー測定値に無駄時間が含まれ、カロリー測定値の位相がカロリー推定値の位相に対して遅れている場合、健全性評価部130が、カロリー推定値を予め定められた一定時間遅延させる位相合わせを行った後に、健全性評価を行うようにしてもよい。これにより正確に健全性評価を行うことができる。
また、測定対象の状態量や、推定部150の推定方法によっては、推定部150から出力される状態量推定値の位相が、遅れ補償部120から出力される状態量測定値の位相よりも遅れる場合が考えられる。この場合、健全性評価部130が、状態量測定値を予め定められた一定時間遅延させる位相合わせを行った後に、健全性評価を行うようにしてもよい。
また、上記では、直近の一定時間(例えば直近10分間)におけるカロリー測定値とカロリー推定値との相関値を用いて健全性を評価したが、カロリー測定値とカロリー推定値との差に閾値を設定して、閾値以内の差の場合を「健全」、閾値を超える場合を「不健全」としてもよい。また、直近の一定時間におけるカロリー測定値とカロリー推定値とのそれぞれの平均値について差を求めて閾値と比較してもよい。
【0041】
制御部160は、ガスタービン発電プラント900の制御を行う。特に、制御部160は、健全性評価結果が健全を示す場合は、カロリー測定値を用いてガスタービン910の負荷制御を行う。
一方、健全性評価結果が不健全を示す場合、カロリー測定値が異常である(実際の状態量と異なる)可能性がある。そこで、制御部160は、不健全時の処理として予め定められた処理を行う。例えば、ガスタービン910が高負荷で運転している場合、燃料のカロリー変動によってガスタービン910の燃焼振動が発生することが考えられる。そこで、制御部160は、ガスタービン910を動作制限させる処理を行うことによって、ガスタービン910を保護する。具体的には、制御部160は、ガスタービン910を負荷降下させることによって、燃焼振動を防止する。あるいは、制御部160が、ガスタービン910を停止させることによってガスタービン910を保護するようにしてもよい。
【0042】
このように、制御装置100は、測定対象の状態量を測定する第1の状態量取得部110と、他の状態量から測定対象の状態量を推定する推定部150とを具備し、健全性評価部130が状態量測定値と状態量推定値との健全性評価を行う。この健全性評価により、計測機器を多重化する方法と同様に、得られる状態量(本実施形態では、遅れ補償部120が遅れ補償したカロリー測定値)の信頼性を確保できる。また、測定対象の状態量を測定する計測機器(本実施形態ではカロリー計)を1つのみ用いて健全性評価を行うことができるので、当該計測機器が高価な場合に、当該計測機器を多重化する方法と比べて低コストで状態量を得ることができる。
また、遅れ補償部120が遅れ補償を行うことにより、計測機器が応答遅れを有する場合にも、状態量測定値と状態量推定値との健全性評価が可能であり、信頼性の高い状態量を得ることができる。
【0043】
<第2の実施形態>
制御装置100(図2)は、予め定められた遅れ(図3で説明した例では、予め定められた定数aの示す遅れ)に基づいて遅れ補償を行ったが、状態量測定値と状態量推定値との相関を取って遅れを評価するようにしてもよい。
図4は、本発明の第2の実施形態における制御装置の概略構成を示す構成図である。同図において、制御装置200は、第1の状態量取得部110と、遅れ評価部270と、遅れ補償部220と、健全性評価部130と、第2の状態量取得部140と、推定部150と、制御部160とを具備する。同図において、図2の各部と同様の部分には同一の符号(110、130、140、150、160)を付し、説明を省略する。
【0044】
遅れ評価部270は、第1の状態量取得部110の出力するカロリー測定値と、推定部150の出力するカロリー推定値とに基づいて、カロリー測定値に含まれる遅れを評価する。
具体的には、遅れ評価部270は、推定部150に対して、予め定められた複数の遅れを適用して、異なる遅れを有するカロリー推定値を生成し、それぞれのカロリー推定値とカロリー測定値との相関を取る。そして、相関値が最も大きいカロリー推定値に適用した遅れに基づいて、カロリー測定値の有する遅れを評価する。そして、遅れ評価部270は、評価した遅れに基づいて、遅れ補償部220の行う遅れ補償の補償量を決定し、決定した補償量を遅れ補償部220に出力する。また、遅れ評価部270は、第1の状態量取得部110からカロリー測定値が出力される毎に、当該カロリー測定値を遅れ補償部220に出力(転送)する。
【0045】
例えば、遅れ評価部270は、式(1)のu(k)にカロリー推定値を代入して、一次遅れを有するカロリー推定値y(k+1)を算出する。その際、遅れ評価部270は、定数aの値を複数記憶しておき、それぞれの定数aの値について、一次遅れを有するカロリー推定値を算出する。
以下では、遅れ評価部270が、定数aの値として値a1とa2とを記憶しておき、これらの値を定数aに適用した式(4)および式(5)のそれぞれについて、一次遅れを有するカロリー推定値y1(k+1)とy2(k+1)とを算出する場合について説明するが、遅れの種類は一次遅れに限らないし、遅れ評価部270が算出する、遅れを有するカロリー推定値の数は、3つ以上であってもよい。
【0046】
【数4】
【0047】
まず、推定部150は、第1の状態量取得部110のサンプリング周期と同じサンプリング周期で、カロリー推定値を算出して遅れ評価部270に出力する。
そして、遅れ評価部270は、推定部150からカロリー推定値が出力される毎に、カロリー推定値を、式(4)のu(k)と、式(5)のu(k)とに代入して、定数aの値がa1の場合の、遅れを有するカロリー推定値y1(k+1)と、定数aの値がa2の場合の、遅れを有するカロリー推定値y2(k+1)とを算出する。
次に、遅れ評価部270は、直近の一定時間(例えば直近10分間)について、遅れを有するカロリー推定値y1(k+1)とカロリー測定値との相関値と、遅れを有するカロリー推定値y2(k+1)とカロリー測定値との相関値とを算出する。
そして、遅れ評価部270は、定数aの値を、値a1とa2とのうち、相関値が大きいほうの値に決定し、決定した値を、補償量として遅れ補償部220に出力する。
【0048】
遅れ補償部220は、遅れ評価部270から出力される補償量を用いて、カロリー測定値の遅れ補償を行う。そして、遅れ補償部220は、遅れ補償したカロリー測定値を健全性評価部130に出力する。また、遅れ補償部220は、推定部150からカロリー推定値が出力される毎に、カロリー推定値を健全性評価部130に出力する。
例えば、遅れ補償部220は、式(3)を記憶する際、この式(3)に含まれる「a」を定数を表すパラメータとして記憶しておく。そして、定数aの値として値a1が遅れ評価部270から出力されると、式(3)の定数パラメータaに値a1を適用(パラメータに代入)して式(6)を生成する。
【0049】
【数5】
【0050】
そして、遅れ補償部220は、遅れ評価部270を介して第1の状態量取得部110から出力されるカロリー測定値を式(6)に代入して、遅れ補償したカロリー測定値u’(k)を算出する。
遅れ補償部220は、遅れ補償したカロリー測定値を健全性評価部130に出力する。
【0051】
以上のように、遅れ評価部270が遅れ補償量を決定し、決定された遅れ補償量に従って遅れ補償部220が遅れ補償を行うので、遅れ補償部220が遅れ補償を行う補償量を予め一意に定めておく必要が無い。これにより、制御装置200を設計する際の設計者の負荷を軽減できる。
また、第1の状態量取得部110の取得するカロリー測定値の有する遅れ量が変化する場合にも、遅れ補償部220は、より適切な補償量を用いて遅れ補償を行うことが出来る。
例えば、カロリー計でガスタービンの燃料のカロリーを測定する際、カロリー計の応答遅れは一定であっても、燃料の速度が変化することによって、カロリー測定値の有する遅れ量が変化する場合がある。このようにカロリー測定値の遅れ量が変化する場合にも、遅れ補償部220は、より適切な補償量を用いて遅れ補償を行うことが出来る。すなわち、より信頼性の高い状態量を得ることができる。
【0052】
なお、遅れ評価部270が行う遅れ評価の方法は、上述した状態量測定値と状態量推定値とを比較する方法に限らない。例えば、過去の遅れ評価に従って遅れ評価するなど、他の方法によって遅れ評価を行うようにしてもよい。
例えば、ガスタービンは、停止中に本体温度が低下し、長時間停止した後に再起動すると、定格負荷に到達した後もガスタービン本体温度が上昇し続けることがある。このガスタービン本体温度の上昇により、燃焼器内での燃焼状態が変化して定格負荷での運転中において排ガス中のNOx濃度やCO濃度が変化することがある。このような変化によって排ガスセンサの測定値の遅れ量が変化する場合、遅れ評価部270が、定格負荷での運転中におけるタービン本体温度と遅れ量との関係を予め記憶しておき、タービン本体温度に基づいて、遅れ量(遅れ補償量)を決定するようにしてもよい。
【0053】
また、燃料タンクからガスタービンの燃料(ガス)の供給を受ける場合、燃料中の重い成分が下に溜まる。これにより、燃料タンクが満杯の状態から変化するにつれて燃料のカロリーが変化する場合がある。このような変化に伴ってカロリー計の測定値の遅れ量が変化する場合、遅れ評価部270が、燃料タンク中の燃料残量にと遅れ量との関係を予め記憶しておき、燃料残量に基づいて、遅れ量(遅れ補償量)を決定するようにしてもよい。
あるいは、遅れ量の変化が緩やかな場合、遅れ評価部270が、遅れ量の変化を比較的低次(例えば2次または3次)のモデルに当てはめて遅れ量を予測し、予測した遅れ量に応じて遅れ補償量を決定するようにしてもよい。
また、上記では一例として定数aの値を遅れとして記載したが、第1の状態量取得部110の設置場所によっては、図3に示す無駄時間がサンプリング周期より長い場合もある。このような場合は、無駄時間を変えて相関値を評価し、相関値の高い無駄時間も出力するようにしてもよい。
【0054】
<第3の実施形態>
制御装置100(図2)や制御装置200(図4)において、制御部160は、第1の状態量取得部110の測定するカロリー測定値を用いてプラント制御を行ったが、制御部が、推定部150の推定するカロリー推定値を用いてプラント制御を行うようにしてもよい。
図5は、本発明の第3の実施形態における制御装置の概略構成を示す構成図である。同図において、制御装置300は、第1の状態量取得部110と、遅れ評価部270と、遅れ補償部220と、健全性評価部330と、第2の状態量取得部140と、推定部150と、制御部360とを具備する。同図において、図4の各部と同様の部分には同一の符号(110、140、150、220、270)を付し、説明を省略する。
【0055】
健全性評価部330は、健全性評価部130(図4)と同様、第1の状態量取得部110の測定するカロリー測定値と、推定部150の推定するカロリー推定値との健全性評価を行う。一方、健全性評価部330は、遅れ補償部220が遅れ補償したカロリー測定値を制御部360に出力しない点で、健全性評価部130と異なる。
制御部360は、遅れ補償部220が遅れ評価したカロリー測定値ではなく、推定部150が推定したカロリー推定値に基づいて制御を行う点で、制御部160(図4)と異なる。一方、制御部360は、制御部160と同様、健全性評価部330から出力される健全性評価結果が不健全を示す場合は、ガスタービン910(図1)を動作制限する処理を行うことによってガスタービン910を保護する。
【0056】
このように、制御部360は、推定部150が推定するカロリー推定値を用いてプラント制御を行うので、遅れ補償したカロリー測定値を遅れ補償部220が出力するタイミングが、推定部150がカロリー推定値を出力するタイミングよりも遅い場合に、現在の状態量(燃料のカロリー量)により近い値(カロリー推定値)を用いて、より適切にプラント制御を行うことが出来る。
【0057】
例えば、遅れ補償部120(図2)や遅れ補償部220(図4)が遅れ補償を行う際、遅れの次数が高い場合や無駄時間が長い場合など、遅れ補償したカロリー測定値を得られるまでに時間がかかる場合がある。また、遅れ評価部270(図4)が遅れ評価を行う際、複数の遅れのカロリー推定値のそれぞれについて、カロリー測定値との相関を取る必要がある。サンプリング数によってはこの相関を取る際の演算量が多くなり、処理に時間を要する可能性がある。そして、遅れ評価部270の遅れ評価に時間を要すると、遅れ評価部270が遅れ補償部220に補償量を出力するタイミングが遅くなり、遅れ補償部220が遅れ補償したカロリー測定値を出力するタイミングが遅くなる。
このような場合にも、制御部360は、カロリー推定値を用いて、より適切にプラント制御を行うことが出来る。この点で、制御装置300は、より信頼性の高い状態量を得ることができる。
【0058】
また、健全性評価部330から出力される健全性評価結果が不健全を示す場合は、制御部360が、ガスタービン910を動作制限する処理を行う点で、制御装置300の取得する状態量(制御部360がプラント制御に用いるカロリー推定値)の信頼性を確保できる。この点でも、制御装置300は、より信頼性の高い状態量を得ることができる。
【0059】
<第4の実施形態>
経年変化によるガスタービン910(図1)の性能低下など、第2の状態量取得部140の測定する状態量(例えば、発電機出力や、気温や、ガスタービン回転数や、燃料温度や、燃料流量)と、推定部150が推定すべき状態量(例えば、ガスタービン910に供給される燃料のカロリー)の実際の値との関係が、時間の経過に伴って変化する場合がある。この場合に、推定部が、状態量推定値の大きさを補正するようにしてもよい。
図6は、本発明の第4の実施形態における制御装置の概略構成を示す構成図である。同図において、制御装置400は、第1の状態量取得部110と、遅れ評価部270と、遅れ補償部220と、健全性評価部330と、第2の状態量取得部140と、推定部450と、制御部360と、レベル調整部480とを具備する。同図において、図5の各部と同様の部分には同一の符号(110、140、220、270、330、360)を付し、説明を省略する。
【0060】
レベル調整部480は、遅れ補償部220が遅れ補償したカロリー測定値と、推定部450が推定したカロリー推定値とを比較して、推定部450のカロリー推定値が適切か否かを判定し、不適切であると判定した場合は、カロリー推定値の補正量を決定して推定部450に出力する。例えば、レベル調整部480は、遅れ補償部220が遅れ補償したカロリー測定値と、カロリー推定値との差の大きさ(の、一定時間における平均値)が予め定められた閾値よりも大きいと判定した場合に、推定部450のカロリー推定値が不適切であると判定し、遅れ補償部220が遅れ補償したカロリー測定値を、カロリー推定値で除算した比率(の、一定時間における平均値)を補正量として推定部450に出力する。
推定部450は、レベル調整部480から出力される補正量に基づいて、状態量推定値の大きさを補正する。例えば、推定部450は、レベル調整部480から出力される、遅れ補償部220が遅れ補償したカロリー測定値を、カロリー推定値で除算した比率をカロリー推定値に乗算することによって、カロリー推定値の大きさをカロリー測定値の大きさに合わせ、この大きさを合わせたカロリー推定値を出力する。
【0061】
例えば、ガスタービン910(図1)において、圧縮機911内部の図示しない翼に埃が付着し、圧縮機911の吸気効率が低下することにより、タービン910の出力が低下する。また、ガスタービン910内部の図示しないシールが経年劣化して空気の漏れが生じると、タービン910の出力が低下する。
このように、タービン910の出力が低下すると、出力低下前との比較において、より高いカロリーの燃料の供給を受けても、同等のタービン出力となる。従って、推定部450がタービン出力等から燃料のカロリーを逆算している場合、タービン出力低下前と同様の計算を行うと、カロリー推定値が低く出てしまう(発電効率が実際の効率よりも高いように計算してしまう)。
そこで、推定部450は、レベル調整部480から出力される補正量に基づいて、大きさを補正したカロリー推定値を出力する。これにより、推定部450は、より正確なカロリー推定値を出力できる。
【0062】
このように、推定部450は、レベル調整部480から出力される補正量に基づいて、大きさを補正したカロリー推定値を出力することで、より正確なカロリー推定値を出力する。この点で、制御装置400は、より信頼性の高い状態量を得ることができる。そして、制御部360は、この信頼性の高い状態量(大きさを補正したカロリー推定値)を用いてプラント制御を行うことで、より適切に制御を行うことができる。
また、健全性評価部330は、大きさを補正したカロリー推定値を用いて健全性評価を行うことで、より正確に健全性評価を行うことができる。この点でも、制御装置400は、より信頼性の高い状態量を得ることができる。
【0063】
なお、以上では、本発明を制御装置に適用した場合について説明したが、本発明の適用範囲は制御装置に限らない。例えば、タービンの燃料のカロリー値を測定して運転員に表示する測定装置にも本発明を適用し得る。
【0064】
なお、制御装置100、200、300または400の全部または一部の機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより各部の処理を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含むものとする。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであってもよい。
【0065】
以上、本発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計変更等も含まれる。
【符号の説明】
【0066】
100、200、300、400 制御装置
110 状態量取得部
120、220 遅れ補償部
130、330 健全性評価部
140 状態量取得部
150、450 推定部
160、360 制御部
270 遅れ評価部
480 レベル調整部
【特許請求の範囲】
【請求項1】
制御対象から取得する状態量に基づいて、制御対象を制御する制御装置であって、
第1の検出手段から状態量として第1の状態量を取得する第1の状態量取得部と、
第2の検出手段から状態量として第2の状態量を取得する第2の状態量取得部と、
前記第2の状態量に基づいて、前記第1の状態量の推定値である第1の推定状態量を演算する推定部と、
前記第1の状態量取得部または前記第2の状態量取得部の少なくとも一方で取得した状態量に対して遅れ補償する遅れ補償部と、
前記第1の状態量取得部で取得した前記第1の状態量と、前記第2の状態量から前記推定部で推定した前記第1の推定状態量とを、前記遅れ補償部で遅れ補償した状態で比較する健全性評価部と、
を備えることを特徴とする制御装置。
【請求項2】
前記第1の推定状態量に遅れを生じさせ、遅れを生じさせた前記第1の推定状態量と、前記第1の状態量との相関に基づいて遅れ評価を行い、補償量を決定する遅れ評価部を備え、
前記遅れ補償部は、前記遅れ評価部が決定した補償量に基づいて遅れ補償を行う、ことを特徴とする請求項1に記載の制御装置。
【請求項3】
前記第1の推定状態量に基づいて前記制御対象の制御を行う制御部を備え、
前記健全性評価部が、前記比較に基づいて、前記第1の状態量取得部で取得した前記第1の状態量と、前記推定部で推定した前記第1の推定状態量とが一致しないと判定すると、前記制御部は、制御対象に対して動作制限させる処理を行う、ことを特徴とする請求項1または請求項2に記載の制御装置。
【請求項4】
前記第1の状態量取得部で取得した前記第1の状態量の大きさと、前記第2の状態量から前記推定部で推定した前記第1の推定状態量の大きさとを、前記遅れ補償部で遅れ補償した状態で比較して、前記推定部が推定する前記第1の推定状態量の大きさの補正量を決定するレベル調整部を備え、
前記推定部は、前記レベル調整部が決定した補正量に従って、前記第1の推定状態量の大きさを補正する、ことを特徴とする請求項1から3のいずれか一項に記載の制御装置。
【請求項5】
前記第2の検出手段は、前記第1の検出手段よりも高い応答性を有し、
前記遅れ補償部は、前記第1の検出手段の応答遅れを補償する、ことを特徴とする請求項1から4のいずれか一項に記載の制御装置。
【請求項6】
第1の検出手段から状態量として第1の状態量を取得する第1の状態量取得部と、
第2の検出手段から状態量として第2の状態量を取得する第2の状態量取得部と、
前記第2の状態量に基づいて、前記第1の状態量の推定値である第1の推定状態量を演算する推定部と、
前記第1の状態量取得部または前記第2の状態量取得部の少なくとも一方で取得した状態量に対して遅れ補償する遅れ補償部と、
前記第1の状態量取得部で取得した前記第1の状態量と、前記第2の状態量から前記推定部で推定した前記第1の推定状態量とを、前記遅れ補償部で遅れ補償した状態で比較する健全性評価部と、
を備えることを特徴とする状態量取得装置。
【請求項1】
制御対象から取得する状態量に基づいて、制御対象を制御する制御装置であって、
第1の検出手段から状態量として第1の状態量を取得する第1の状態量取得部と、
第2の検出手段から状態量として第2の状態量を取得する第2の状態量取得部と、
前記第2の状態量に基づいて、前記第1の状態量の推定値である第1の推定状態量を演算する推定部と、
前記第1の状態量取得部または前記第2の状態量取得部の少なくとも一方で取得した状態量に対して遅れ補償する遅れ補償部と、
前記第1の状態量取得部で取得した前記第1の状態量と、前記第2の状態量から前記推定部で推定した前記第1の推定状態量とを、前記遅れ補償部で遅れ補償した状態で比較する健全性評価部と、
を備えることを特徴とする制御装置。
【請求項2】
前記第1の推定状態量に遅れを生じさせ、遅れを生じさせた前記第1の推定状態量と、前記第1の状態量との相関に基づいて遅れ評価を行い、補償量を決定する遅れ評価部を備え、
前記遅れ補償部は、前記遅れ評価部が決定した補償量に基づいて遅れ補償を行う、ことを特徴とする請求項1に記載の制御装置。
【請求項3】
前記第1の推定状態量に基づいて前記制御対象の制御を行う制御部を備え、
前記健全性評価部が、前記比較に基づいて、前記第1の状態量取得部で取得した前記第1の状態量と、前記推定部で推定した前記第1の推定状態量とが一致しないと判定すると、前記制御部は、制御対象に対して動作制限させる処理を行う、ことを特徴とする請求項1または請求項2に記載の制御装置。
【請求項4】
前記第1の状態量取得部で取得した前記第1の状態量の大きさと、前記第2の状態量から前記推定部で推定した前記第1の推定状態量の大きさとを、前記遅れ補償部で遅れ補償した状態で比較して、前記推定部が推定する前記第1の推定状態量の大きさの補正量を決定するレベル調整部を備え、
前記推定部は、前記レベル調整部が決定した補正量に従って、前記第1の推定状態量の大きさを補正する、ことを特徴とする請求項1から3のいずれか一項に記載の制御装置。
【請求項5】
前記第2の検出手段は、前記第1の検出手段よりも高い応答性を有し、
前記遅れ補償部は、前記第1の検出手段の応答遅れを補償する、ことを特徴とする請求項1から4のいずれか一項に記載の制御装置。
【請求項6】
第1の検出手段から状態量として第1の状態量を取得する第1の状態量取得部と、
第2の検出手段から状態量として第2の状態量を取得する第2の状態量取得部と、
前記第2の状態量に基づいて、前記第1の状態量の推定値である第1の推定状態量を演算する推定部と、
前記第1の状態量取得部または前記第2の状態量取得部の少なくとも一方で取得した状態量に対して遅れ補償する遅れ補償部と、
前記第1の状態量取得部で取得した前記第1の状態量と、前記第2の状態量から前記推定部で推定した前記第1の推定状態量とを、前記遅れ補償部で遅れ補償した状態で比較する健全性評価部と、
を備えることを特徴とする状態量取得装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−112330(P2012−112330A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−262586(P2010−262586)
【出願日】平成22年11月25日(2010.11.25)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月25日(2010.11.25)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]