
前照灯システム効果評価シミュレータ

【課題】前照灯システムの導入効果を定量的に評価することができるシミュレータを提供する。
【解決手段】実際の交通流を模擬するシミュレーションを予め設定した所定期間実施可能なシミュレータにおいて、交通環境再現部とドライバ模擬部と車両再現部とを備え、交通環境再現部が、再現した道路交通環境に出現させる全ての車両のうち、所定の割合の車両が前照灯システムを搭載するように車両特性を割り当て、ドライバ模擬部が、シミュレーション時間が夜間である場合、道路交通環境に出現している一の車両に対して対向車が存在しているときに、対向車の前照灯の配光状態を考慮して一の車両のドライバの等価光幕輝度を算出し、その等価光幕輝度を用いて当該ドライバが歩行者を認知可能か否かを判断するように構成する。
【解決手段】実際の交通流を模擬するシミュレーションを予め設定した所定期間実施可能なシミュレータにおいて、交通環境再現部とドライバ模擬部と車両再現部とを備え、交通環境再現部が、再現した道路交通環境に出現させる全ての車両のうち、所定の割合の車両が前照灯システムを搭載するように車両特性を割り当て、ドライバ模擬部が、シミュレーション時間が夜間である場合、道路交通環境に出現している一の車両に対して対向車が存在しているときに、対向車の前照灯の配光状態を考慮して一の車両のドライバの等価光幕輝度を算出し、その等価光幕輝度を用いて当該ドライバが歩行者を認知可能か否かを判断するように構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路交通の予防安全支援システムの1つである前照灯システムの導入効果を評価する、前照灯システム効果評価シミュレータに関する。
【背景技術】
【0002】
従来、道路交通の予防安全支援システムとして、アンチロックブレーキシステム(ABS)やレーンキープアシストシステム等、様々なシステムが開発されている。このような様々な予防安全支援システムのうち、実車両に導入されていない、あるいは普及率の低いものに関しては、実際の道路交通の事故統計等からそのシステムの導入効果を評価することができない。そのため、シミュレーションによって実際の道路交通状況(交通流)を再現し、その導入効果を定量的に評価する技術も開発されている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−72809号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年開発が進んでいる予防安全支援システムの1つに、「Adaptive Driving Beam(ADB;配光可変型走行ビーム)」という前照灯配光制御システム(単に「前照灯システム」ともいう)がある。ADBは、例えばルームミラーの裏側に設置したセンサによって対向車のヘッドライトや先行車のテールランプを検知し、対向車や先行車が存在する範囲の前照灯の配光を自動的に制限し、眩惑を防止するものである。このADBは未だ開発・普及段階にあるため、シミュレーションによってその導入効果を評価する技術が求められている。
【0005】
本発明は、斯かる実情に鑑み、前照灯システムの導入効果を定量的に評価することができる、前照灯システム効果評価シミュレータを提供しようとするものである。
【課題を解決するための手段】
【0006】
本発明の前照灯システム効果評価シミュレータは、電子計算機で構成され、実際の交通流を模擬するシミュレーションを予め設定された所定の期間実施する前照灯システム効果評価シミュレータであって、道路交通環境を前記電子計算機内に再現し、また前記道路交通環境に出現する全ての車両および歩行者のタイムスケジュールを作成し、さらに前記道路交通環境に出現する全ての車両に車両特性を個別に割り当てるとともに、前記車両を運転するドライバにドライバ特性を個別に割り当てる交通環境再現部と、前記道路交通環境に出現する各車両を運転するドライバの運転行動を、前記交通環境再現部によって割り当てられた前記ドライバ特性に基づいて個別に模擬するドライバ模擬部と、前記道路交通環境に出現する各車両の挙動を、前記交通環境再現部によって割り当てられた前記車両特性と前記ドライバ模擬部によって模擬された前記運転行動とに基づいて個別に再現する車両再現部と、前記交通環境再現部、前記ドライバ模擬部および前記車両再現部を統括して制御し、前記期間中に発生した事故件数を計測する統括制御部と、を備え、前記交通環境再現部は、前記道路交通環境に出現する全ての車両のうちの所定の割合の車両が前照灯の配光状態を制御可能な前照灯システムを搭載するように前記車両特性を割り当て、前記ドライバ模擬部は、シミュレーション時間が夜間である場合、前記道路交通環境に出現している一の車両に対して対向車が存在しているときに、前記対向車の前照灯の配光状態を考慮して前記一の車両のドライバの等価光幕輝度を算出し、算出された前記等価光幕輝度を用いて当該ドライバが前記歩行者を認知可能か否かを判断することを特徴としている。
【0007】
なお、前記前照灯システムは、前記一の車両に搭載されたセンサによって前記対向車および前記一の車両に対する先行車を検出し、前記一の車両の前照灯による照射範囲について、前記対向車および前記先行車に対する照射を制限する一方、前記歩行者は制限なく照射するように当該照射範囲を調整することが好ましい。
【発明の効果】
【0008】
本発明の前照灯システム効果評価シミュレータによれば、例えばADB等の次世代の前照灯システムの普及率に応じた事故率やニアミス率の低減効果をシミュレーションによって定量的に評価することができる。その結果、効率的且つ効果的な車両安全対策の実施も可能となる。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施形態に係る前照灯システム効果評価シミュレータのハードウェアの全体構成を示すブロック図である。
【図2】本発明の一実施形態に係る前照灯システム効果評価シミュレータのソフトウェアの全体構成を示すブロック図である。
【図3】本発明の一実施形態に係る前照灯システム効果評価シミュレータのドライバ模擬部が設定する視野制限フィルタを示す模式図である。
【図4】本発明の一実施形態に係る前照灯システム効果評価シミュレータの等価光幕輝度算出部の構成を示すブロック図である。
【図5】本発明の一実施形態に係る前照灯システム効果評価シミュレータの等価光幕輝度算出部が等価光幕輝度を算出する方法を示すチャートである。
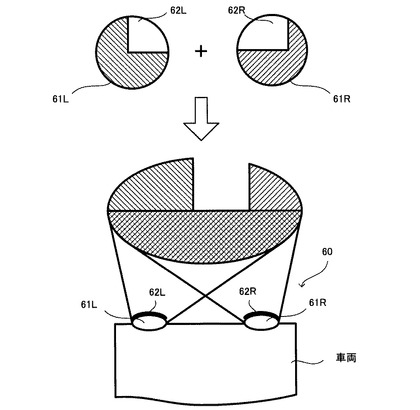
【図6】本発明の一実施形態に係る前照灯システム効果評価シミュレータの車両再現部が再現する車両が搭載するADBの構成および機能を示す模式図である。
【図7】本発明の一実施形態に係る前照灯システム効果評価シミュレータの交通環境再現部が再現する道路交通環境において、ADBの搭載された車両が配光を制限している具体的な状況を示す模式図である。
【図8】本発明の一実施形態に係る前照灯システム効果評価シミュレータが実施するシミュレーションの概略を示すフローチャートである。
【図9】本発明の一実施形態に係る前照灯システム効果評価シミュレータが実施するシミュレーション中の夜間用可視判定処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態を添付図面を参照して説明する。本実施形態の前照灯システム効果評価シミュレータ(以下、単に「効果評価シミュレータ」ともいう)は、道路交通環境(車道、歩道、街路灯、建造物および街路樹等からなる環境)を電子計算機内に作り出し、ドライバが運転中に行っている認知・判断・操作という行動(運転行動)を模擬して前照灯システムを搭載した車両を上記道路交通環境上に走行させ、時々刻々と変化する道路交通状況(交通流)を再現し、その事故率・ニアミス率から前照灯システムの導入効果を評価することを可能にしたものである。
【0011】
<全体構成>
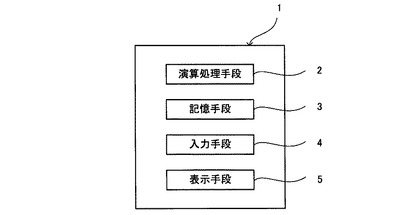
図1に、本実施形態の効果評価シミュレータ1のハードウェアの全体構成を示す。効果評価シミュレータ1は、コンピュータ等の電子計算機で構成されており、物理的な構成要素として、演算処理手段2としてのCPUと、記憶手段3としてのROM、RAMおよびハードディスクと、入力手段4としてのキーボードおよびマウスと、表示手段4としてのディスプレイと、を備えている。
【0012】
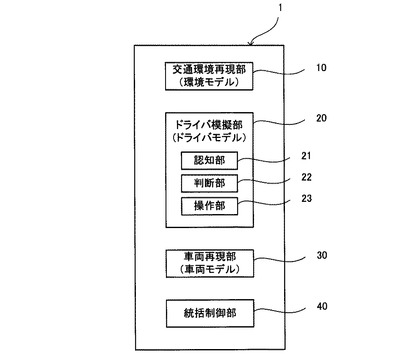
また、図2に、本実施形態の効果評価シミュレータ1のソフトウェアの全体構成を示す。効果評価装置1は、機能的な構成要素として、道路交通環境を再現する交通環境再現部(環境プログラム)10と、ドライバの運転行動を模擬するドライバ模擬部(ドライバプログラム)20と、車両の運動性能・挙動を再現する車両再現部(車両プログラム)30と、それら3つの再現・模擬部10,20,30を統括して制御する統括制御部(統括プログラム)40と、を備えている。
【0013】
上記の各部10,20,30,40はプログラムとして記憶手段3に記憶されており、演算処理手段2が当該プログラムを実行することで、各部10,20,30,40の機能が実現されるようになっている。すなわち、統括制御部40が、効果評価シミュレータ1のシミュレーション全体を制御して、実在する道路交通環境と同等の道路交通環境を三次元の仮想空間として再現し、当該道路交通環境上に車両を自律的に走行させる。そして、自律的に走行している車両や歩行者の相互の位置関係を常に管理・記録し、所定のシミュレーション期間中の事故率およびニアミス率を算出するようになっている。
【0014】
<交通環境再現部;環境モデル>
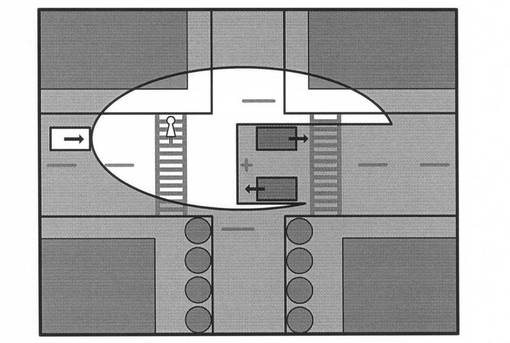
交通環境再現部10は、予め記憶手段3に記憶された情報(道路情報、道路照明環境情報、建造物情報、街路樹情報等)に基づき、モデル化された道路交通環境(環境モデル)を再現する。道路交通環境は3次元空間で再現され、本実施形態では具体的に以下の4つの特徴を有する交差点を中心とした所定範囲の領域を再現するようにする(当該道路交通環境を2次元で示した図7参照)。
【0015】
(1)信号機のない十字交差点
(2)主流側道路は双方向2車線で横断歩道あり
(3)従流側道路は1車線で横断歩道なし
(4)見通しが悪い
【0016】
なお、交通環境再現部10が再現し、シミュレーションの対象とする道路交通環境は、ここに例示する環境に限定されるものではない。つまり、上記の交差点の特徴は適宜に設定変更可能なものであり、例えば、T字交差点、Y字交差点、変則交差点、5方向交差点、ロータリー交差点、立体交差点等において、信号機の有無、車線の数、横断歩道の有無、見通しの良否等を適宜に設定変更可能である。また、交差点以外の道路が交わらない道路交通環境(例えば、高速道路)を再現しても良い。さらに、複数の交差点や交差点以外の特徴のある道路交通環境(例えば、橋やトンネルやパーキングエリア)を含む広範な道路交通環境を再現しても良い。
【0017】
交通環境再現部10はまた、実際の交通流(以下、単に「実交通流」ともいう)から得た情報(進入方向別交通密度、進入方向別交差点進入速度分布、進入方向別交差点挙動分布、車頭間隔別相対速度分布、信号点消灯時間間隔、信号交差点での直進、右折および左折の進行比率、信号待ち車両の車頭間隔等)に基づき、上記道路交通環境に出現する車両のタイムスケジュールをモンテカルロ法で作成する。上記の実交通流から得た各情報は、シミュレーション期間とともにシミュレーションの初期条件となるものであり、予め記憶手段3に記憶されたデータを利用しても良いし、入力手段4を介してオペレータによってシミュレーション開始時に逐次入力しても良い。
【0018】
車両が出現するタイミングは、周辺の状況に基づき車頭時間を制御するものとする。例えば、再現する道路交通環境に信号交差点が隣接する場合には、そこから流入する交通流は、その信号交差点による赤信号の信号待ち車両によって起こるErlang分布と信号待ちのない車両によって起こる指数分布とが信号周期によって時間差に基づいて混合される。これにより、交通環境再現部10が作り出す交通流は、「交差点進入時の車頭間隔時間」と「交差点進入時の速度」と「交差点を通過するのに要する時間(交差点通過時間)」とが少なくとも実交通流と同等となる。
【0019】
車両のタイムスケジュールには、シミュレーション時間における各車両の出現時刻、各車両の出現位置(初期位置)および最終目的位置、車両の出現時点での速度(初期速度)、が少なくとも設定される。また、上記道路交通環境に出現する歩行者のタイムスケジュールも、車両のタイムスケジュールと同様に、実交通流から得た情報に基づきモンテカルロ法で作成する。
【0020】
交通環境再現部10はさらに、所定の情報(評価対象の前照灯システムの普及率およびドライバの年齢分布等)に基づき、タイムスケジュールに登場する全ての車両に対して車両特性(運動性能)をそれぞれ割り当てるとともに、各車両を運転するドライバに対してドライバ特性(ドライバタイプ、視機能特性、速度認知エラー特性、ブレーキ踏力不足エラー特性)をそれぞれ割り当てる。この特性の割り当てによって、ドライバの運転行動や車両の運動性能が変化し、現実と同様に個体差が生じるようになっている。上記の所定の情報は、予め記憶手段3に記憶されたデータを利用しても良いし、入力手段4を介してオペレータによってシミュレーション開始時に逐次入力しても良い。
【0021】
なお、車両は例えば全長4.4m、全幅1.7m、全高1.45mの直方体形状のポリゴンオブジェクトで道路交通環境上に再現され、建造物、街路樹および停止線等の他の物体も適宜のサイズ・形状のポリゴンオブジェクトで再現される。
【0022】
<ドライバ模擬部;ドライバモデル>
ドライバ模擬部20は、予め記憶手段3に記憶された情報および交通環境再現部10から入力された個々のドライバ特性に基づき、モデル化されたドライバ(ドライバモデル)の運転行動(認知、判断、操作)を再現し、車両の操作量を算出して車両再現部30に出力する。具体的には、ドライバ模擬部20は認知部21と判断部22と操作部23とを備え、他車両や歩行者を認知し、衝突の可能性があるか否かを判断し、衝突の可能性があると判断した場合に具体的な衝突回避操作量(ここではブレーキ操作量)を算出する。
【0023】
<<認知部>>
認知部21は、交通環境再現部10によって割り当てられたドライバ特性に基づき、ドライバごとに「視野制限フィルタ」を個別に設定する。図3に示すように、本実施形態では視野制限フィルタとして、例えば「優良ドライバ型フィルタ」、「確認不十分型フィルタ」および「依存型フィルタ」が備えられている。
【0024】
優良ドライバには優良ドライバ型フィルタが適用される。優良ドライバ型フィルタは、進行方向を中心として±50°(視野角100°)にドライバの可視範囲を制限するフィルタである。ただし、優良ドライバの搭乗する車両が交差点内を走行しているときはフィルタを適用外とし、進行方向を中心として±90°(視野角180°)の範囲がドライバの可視範囲となる。
【0025】
左右確認不十分ドライバには確認不十分型フィルタが適用される。確認不十分型フィルタは、進行方向を中心として±15°(視野角30°)にドライバの可視範囲を制限するフィルタである。ただし、左右確認不十分ドライバの搭乗する車両が交差点内を走行しているときはフィルタを適用外とし、進行方向を中心として±90°(視野角180°)の範囲がドライバの可視範囲となる。
【0026】
先行車両依存ドライバには依存型フィルタが適用される。依存型フィルタは、進行方向を中心として±4°(視野角8°)の範囲(先行車の後部を確認可能な範囲)にドライバの可視範囲を制限するフィルタである。なお、先行車両依存ドライバの搭乗する車両が交差点内を走行しているときにもフィルタは適用され、前述の2つのドライバタイプと異なって可視範囲は拡張されない。
【0027】
なお、上記の交差点内とは、自車両が交差点を直進する場合は、走行する道路と交差する道路とが重なる範囲であり、一方、自車両が交差点を右折または左折する場合は、予め走行している道路上で旋回し始めてから交差する道路上で旋回が終了するまでの範囲であるとする。また、上記の各視野制限フィルタは、ここに例示するフィルタに限定されるものではない。例えば、各視野制限フィルタの可視範囲を決定する視野角は、任意の数値に設定変更可能なものである。また、視野制限フィルタの数は3つに限定されず、少なくとも2つの種類の異なるフィルタを備えていれば良い。より具体的には例えば、第1のフィルタと、第1のフィルタよりも視野角の小さい可視範囲に制限する第2のフィルタとを少なくとも備えていれば好ましい。そして、所定の道路範囲内(本実施形態では交差点内)を自車両が走行する場合は、第1のフィルタは適用外となる一方、第2のフィルタは継続して適用されるものであると好ましい。また例えば、第1のフィルタと、第1のフィルタよりも視野角の小さい可視範囲に制限する第2のフィルタと、第2のフィルタよりも視野角の小さい可視範囲に制限する第3のフィルタとを少なくとも備え、所定の道路範囲内を自車両が走行する場合は、第1および第2のフィルタは適用外となる一方、第3のフィルタは継続して適用されるものであると好ましい。
【0028】
認知部21は、上述のように個別に設定された視野制限フィルタに基づき、自律走行を可能とすべく、ドライバごとに視認可能な自車両の周囲の可視物体を特定する(以下、これを可視判定という)。この可視判定は、各ドライバの視点位置(例えば左右前輪を結ぶ線分の中点から後方へ1.3m、地上高1.2mの位置)の水平面上と垂直面上で行われる。
【0029】
水平面上の可視判定は、自車両の進行方向ベクトルを中心に±90°の範囲内で行われ、道路交通環境上に出現している他車両、歩行者、建造物および街路樹等の物体の中から可視物体を特定する。一方、垂直面上の可視判定は、水平面から下方向に90°の範囲で行われ、道路上にある視認可能な停止線を特定する。このとき、ドライバが視野制限フィルタ内の他車両や歩行者を視認できるか否かは、建造物および街路樹等の障害物による死角についても考慮する。
【0030】
また、認知部21は、交通環境再現部10によって割り当てられたドライバ特性(ドライバの年齢;視機能特性)に基づき、ドライバごとに「等価光幕輝度」を個別に算出する。これは、夜間に暗くて歩行者を認知できなくなるケースを想定したものである。等価光幕輝度はドライバの年齢に左右され、若齢者ドライバの方が眩しさが少ないため、視認性が良好であり、一方、高齢者ドライバは眩しさが強く表れるため、視認性が極めて悪いようになっている。
【0031】
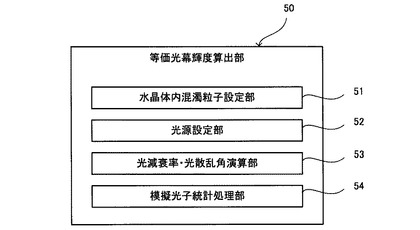
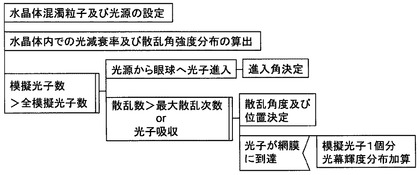
図4および図5を用いて、等価光幕輝度の算出方法について詳述する。認知部21には、図4に示すような等価光幕輝度算出部50が備えられている。等価光幕輝度算出部50は、水晶体内混濁粒子設定部51と、光源設定部52と、光減衰率・光散乱角演算部53と、模擬光子統計処理部54とを有し、図5に示すような解析手法でドライバの年齢に応じて等価光幕輝度を算出する。
【0032】
水晶体内混濁粒子設定部51は、水晶体の光学濃度Tおよび混濁粒子の粒径kを算出する手段である。水晶体内の光学濃度Tは加齢により変化するので、以下の数式(1)および数式(2)で表される加齢変化モデル式を予め記憶手段3にプログラムとして記憶しておく。これらの数式(1)および数式(2)を用いて、交通環境再現部10から入力されるドライバの年齢に基づき、光学濃度情報を生成する。なお、ドライバの年齢が60歳未満の場合には数式(1)を利用し、ドライバが60歳以上の場合には数式(2)を利用する。
【数1】

【数2】
【0033】
数式(1)および(2)において、Aはドライバの年齢、λは波長、L1は水晶体自体の屈折率、L2は水晶体内の混濁粒子の屈折率である。ここでは、水晶体自体の屈折率L1を1.40とし、水晶体内の混濁粒子の屈折率L2を1.55としてプログラムに予め登録しておく。なお、この値は適宜変更することも可能であり、更に加齢状態をふまえて再設定するようにしても良い。
【0034】
また、混濁粒子の粒径kも加齢により変化するので、以下の数式(3)で表される加齢変化モデル式を予め記憶手段3にプログラムとして記憶しておく。この数式(3)を用いて、ドライバの年齢に基づき混濁粒子の粒径kを算出する。なお、粒径k[μm]は1〜7μmの範囲内になるのが通常である。
【数3】
【0035】
光源設定部52は、車両の前照灯の種類、すれ違う際の光軸変動、前照灯と利用者との距離、シミュレーションする時間帯(日中、夜間、夕暮れ)、天候(晴れ、雨、曇り)、道路照明の状態等の情報を、記憶手段に予め記憶され適宜に更新されるデータテーブルから取得し、取得した情報に基づき光源条件を設定してRAM等の記憶手段に格納する手段である。上記の情報は交通環境再現部10から取得する。
【0036】
光減衰率・光散乱角演算部53は、散乱強度I(α,θ)等を算出する手段である。まずMie散乱理論を用いて、単位照度となる平面波が入射する時の散乱強度I(α,θ)および散乱効率Ke(α);(散乱断面積/幾何学断面積)を、散乱角θ、サイズパラメータα=2πr/λ(r:微粒子半径)との関係を定めた以下の数式(4)または数式(5)により算出する。なお、数式(5)におけるavおよびbvは、1次、2次Riccati-Bessel関数ψv、ζv、およびその導関数よりなる。また、Reは実部をとる操作を表す。
【数4】
【数5】
【0037】
各微粒子における散乱特性である散乱強度I(α,θ)や散乱効率Ke(α)が求まれば、以下の数式(6)によって、微粒子が複数個存在する空間での散乱光分布を推定することができる。なお、数式(6)におけるP1v(cosθ)は、Legendre多項式からなっている。
【数6】
【0038】
さらに、散乱効率Ke(α)により、光が大気中を進行した時の減衰係数σ(α)[m−1]を以下の数式(7)を用いて算出する。なお、数式(7)において、na(r)は微粒子濃度分布[個/m3]、f(λ)は光の波長確率密度分布である。
【数7】
【0039】
次いで、この減衰係数σ(α)により、光子が次に散乱するまでの予測距離Lを以下の数式(8)を用いて算出する。なお、数式(8)において、ran1は0〜1の一様乱数である。
【数8】
【0040】
そして、以下の数式(9)の散乱角確率密度分布F(α,θ)により、以下の数式10を用いて各散乱地点における散乱角θを予測する。なお、数式(9)において、w(φ)はφでの立体角である。また、数式(10)において、ran2は0〜1の一様乱数である。
【数9】
【数10】
【0041】
模擬光子統計処理部54は、水晶体内混濁粒子設定部51と光源設定部52と光減衰率・光散乱角演算部53とを統括して制御しながらモンテカルロ法により処理を行い、最終的に光幕輝度分布を算出する手段である。
【0042】
模擬光子統計処理部54は、水晶体内混濁粒子設定部51によって設定された水晶体の条件や光源設定部52によって設定された光源の条件に基づいて、各種光源から眼球へ進入する光子の進入角を決定する。そして、光減衰率・光散乱角演算部53を制御して、その光子が眼球内のどの位置でどの角度に散乱するか、あるいは散乱せずにそのまま網膜に到達するかを1個ずつ確率的に予測する。散乱した場合はさらに次に散乱する位置を予測し、散乱数>最大散乱次数あるいは光子吸収、となるまで試行を続け(なお最大散乱次数は解析結果に影響を与えない十分に大きな数とする)、最終的に網膜に到達する位置および角度(あるいは眼球外に放出すること)を予測していく。この予測を全模擬光子数(全模擬光子数は、解析結果に影響を与えない十分に大きな数とする)に対して試行し、その結果網膜に到達した光子の分布から眼球内光散乱を考慮した網膜像を推定する。つまり、模擬光子1個分の光幕輝度分布を算出し、さらに模擬光子1個分の光幕輝度分布に基づいてドライバの等価光幕輝度を算出する。
【0043】
前述のように、道路交通環境上では各物体をポリゴンオブジェクトとして再現しており、各ドライバは可視物体に対してポリゴンレベルの可視判定を行うことができる。これによって、交差点に向かう各ドライバの可視範囲に塀や植栽等が存在した場合、見通しの悪さを再現することが可能となっている。
【0044】
<<判断部>>
判断部22では、認知部21で特定された可視物体と自車両とが衝突する危険性を判断する。以下、これをリスク判定ともいう。可視物体が複数存在する場合には、すべての可視物体に対して衝突の危険性の度合いを示す不安全度を算出して危険性の順位付けも行い、危険性が最も高い物体を最不安全物体とする。
【0045】
リスク判定では、特定された可視物体の位置および速度に基づいて衝突ポイントに到達するまでの時間(衝突回避可能時間)を算出して用いる。このとき、交通環境再現部10によって各ドライバに割り当てられた速度認知特性(速度認知エラー特性)を考慮し、ヒューマンエラーを含んだ速度の推測値でリスク判定を行う。リスク判定の結果、ドライバが衝突回避行動をとるか否かを決定する。本実施形態では、衝突回避行動はブレーキ操作とする。
【0046】
リスク判定について詳述する。通常、ドライバが感じる衝突の危険性はブレーキペダル踏力に反映されると考えられるため、本実施形態では、不安全度はブレーキを踏むべき対象と判断した物体に対して、そのときに発揮すべきブレーキペダル踏力値をもとに算出する。判断部22はこのリスク判定を時々刻々と行い、最不安全物体との衝突を回避するためのブレーキ操作量を算出する。以下に、不安全度の基準となるブレーキタイミングを決定する判別式と発揮すべきブレーキ操作量(ブレーキペダル踏力値)を算出する式を示す。
【0047】
本実施形態では、リスク判定のプロセスは、状況(交差、追従、右左折)に応じて以下の数式(11)〜(14)によって算出する。ここで、「交差」とは、自車両と最不安全物体とがともに直進して交差点内に進入し、且つ衝突の可能性がある状況である。「追従」とは、自車両が最不安全物体の後方に位置し共に直進する状態で、且つ追突する可能性がある状況である。「右左折」とは、自車両または最不安全物体が右左折している状態で交差点内に進入し、且つ衝突の可能性がある状況である。
【0048】
「交差」におけるブレーキタイミングは、対象車両に対する視角の増加率変化[(1/φ)dφ/dt]を指標とした。また、ブレーキペダル踏力値は、視角の増加率変化に自車速度Vを掛けたものと、[1/(相対距離L)2]とを指標とした。なお、これらの指標の求め方については適宜変更することも可能である。
【0049】
「追従」および「右左折」におけるブレーキタイミングは、車間距離を相対速度で除した値(TTC)の逆数であるiTTCを指標とした。また、ブレーキペダル踏力値は、iTTCに自車速度Vを掛けたものと、[1/(相対距離L)2]とを指標とした。なお、これらの指標の求め方については適宜変更することも可能である。
【0050】
各数式(11)〜(14)の係数値a〜hは、自車両が優先道路および非優先道路のいずれを走行しているかによって異なる値が設定される。この係数値a〜hの違いにより、優先道路を走行している車両が非優先道路を走行している車両に対して優先される挙動を可能にしている。
【0051】
数式(11)は交差時のブレーキタイミングを決定する判別式であり、数式(12)は交差時のブレーキペダル踏力値の算出式であり、数式(13)は追従・右左折時のブレーキタイミングを決定する判別式であり、数式(14)は追従・右左折時のレーキペダル踏力値の算出式である。
【数11】
【数12】
【数13】
【数14】
【0052】
<<操作部>>
操作部23では、判断部22で算出された衝突回避可能時間と停止位置とに対応したブレーキ操作量を決定し、車両再現部30に出力する。なお、ここでも、交通環境再現部10によって各ドライバに割り当てられたブレーキペダルの操作特性(ブレーキ踏力不足エラー特性)を考慮し、ブレーキ踏力不足などの操作エラーを反映されたブレーキ操作量を算出する。
【0053】
<車両再現部;車両モデル>
車両再現部30は、ドライバ模擬部20が出力する運転操作量(ブレーキ操作量)に基づいて、モデル化した車両(車両モデル)の挙動量(減速度等)を演算し、シミュレーション時間における現時刻の位置座標を決定する。決定された各車両の現時刻の位置座標は統括制御部40に出力され、統括制御部40によって後述するデータテーブルが書き換えられる。
【0054】
本実施形態では、車両モデルとして、前後方向移動の自由度および前後のタイヤにおける回転の自由度の計3自由度を有する等価二輪車モデルを用いる。このような等価二輪車モデルによれば、前後の荷重移動とタイヤのスリップを考慮した制動挙動を計算することが可能である。
【0055】
また、本実施形態では、予め記憶手段3に記憶された情報および交通環境再現部10から入力された個々の車両特性に基づいて、道路交通環境上に出現する全車両のうちの所定の割合(0%〜100%)の車両にADB60(図6参照)が搭載されているように設定される。これにより、ADB60が搭載されている車両は、他車両(対向車や先行車)の位置情報に基づいて前照灯の照射範囲を自動的に制限することが可能となっている。また、ADB60が搭載されていない車両は、他車両(対向車や先行車)の位置情報に基づいてロービームとハイビームの切り替えを自動的に設定することが可能となっている。ADB60が作動する条件(例えば、シミュレーション時間が夜間であるとの条件)は、予め設定されているようにする。なお、ADB60の設定については、オペレータが入力手段4を介して任意に変更することも可能なものとする。
【0056】
図6および図7を用いてADB60の構成および機能について説明する。ADB60は、車両に搭載されたセンサ(図示略)によって対向車や先行車を検出し、左右の前照灯61L,61Rによる照射範囲を左右で個別に調整して、対向車や先行車に対する照射を制限する一方、歩行者は照射するものである。ADB60は左右の前照灯61L,61Rそれぞれに対してシェード(遮蔽手段)62L,62Rを備えており、左右の前照灯61L,61Rの前面の一部をシェード62L,62Rで適宜に覆うことで、照射範囲を調整することが可能となっている。
【0057】
<シミュレーション>
図8を用いて、本実施形態のシミュレータ1によるシミュレーションの概略を説明する。シミュレーションは、メインルーチンである統括プログラムを演算処理手段2が実行することで開始される。
【0058】
最初のステップS01では、シミュレーション期間等のシミュレーション条件に係るデータを読み込む。各種のシミュレーション条件はシミュレーション開始前に設定されていれば良く、例えばシミュレーション期間は、前述のように予め記憶手段3に記憶されたデータを利用しても良いし、入力手段4を介してシミュレーション開始時にオペレータによって入力されても良い。具体的なシミュレーション期間は、例えば2592000s(30日間)等の事故統計をとるのに十分な期間に設定されると好ましい。また、ニアミスとは、例えば減速度4.0m/s2が0.2s以上継続し、且つ相対距離が6.0m以内の状態に設定する。このニアミスを判定する数値条件も予め記憶手段3に記憶させておくと好ましいが、オペレータが入力手段4を介して任意に変更することも可能なものとする。
【0059】
ステップS02では、統括制御部40が、車両やドライバの特性に係るデータを記憶手段3から読み込む。
【0060】
ステップS03では、交通環境再現部10が、ステップS01およびS02で読み込んだデータに基づいて、モデル化された道路交通環境を三次元仮想空間として構築する。構築された道路交通環境は表示装置5に表示される。また、以下のステップS04〜S18により、当該道路交通環境上に車両や歩行者が時々刻々と出現し、通行するようになるが、その状況も表示装置5に表示される。これにより、オペレータは再現された交通流の状況をシミュレーション期間全体に亘って観察し、把握することが可能となっている。
【0061】
ステップS04では、交通環境再現部10が、ステップS01およびS02で読み込んだデータに基づいて、移動体(車両および歩行者)のタイムスケジュールを作成する。
【0062】
ステップS05では、統括制御部40が、ステップS04で作成されたタイムスケジュールに基づいて、現時点のシミュレーション時間(以下、「現時刻」ともいう)の道路交通環境上に車両および歩行者を出現させる。
【0063】
ステップS06では、統括制御部40が、現在出現している全ての車両についてのデータテーブルを作成する。
【0064】
ステップS07では、統括制御部40が、現時刻が夜間であるか否かを判定する。夜間であればステップS20に進み、そうでなければステップS08に進む。
【0065】
ステップS08では、ドライバ模擬部20の認知部21が、現時刻に出現している全ての車両のうちの任意に指定された車両(例えば、各車両に識別番号を付している場合、その識別番号が最も小さい車両)のドライバについて可視判定を行い、可視物体(他車両および歩行者等)を抽出する。可視判定は、ドライバに適用されている視野制限フィルタに応じて行う。
【0066】
ステップS09では、ドライバ模擬部20の判断部22が、ステップS08で抽出された全ての可視物体についてリスク判定を行い、最不安全物体を特定する。そして、特定された最不安全物体についての衝突回避行動を含む運転行動を決定する。
【0067】
ステップS10では、ドライバ模擬部20の操作部23が、車両操作量を算出する。特に、ステップS09で衝突回避行動をとると判断されたドライバについては、車両操作量としてブレーキ操作量を算出する。算出した車両操作量は車両再現部30に入力する。
【0068】
ステップS11では、車両再現部30が、ステップS10で算出された車両操作量に基づき当該車両の位置座標を算出する。算出した位置座標は統括制御部40に入力する。統括制御部40は、この位置座標を現時刻(次時刻でも良い)の位置座標としてデータテーブルを書き換える。
【0069】
ステップS12では、統括制御部40が、現時刻の道路交通環境上に現時刻(次時刻でも良い)の位置座標の算出が終了していない車両が他に存在しているか否かを判定する。車両が他に存在していればステップS07に戻り、次の車両(例えば、識別番号が次に小さい車両)についてステップS07〜S11の処理を行う。車両全てについて現時刻(次時刻でも良い)の位置座標の算出が終了すればステップS13に進む。
【0070】
ステップS13では、統括制御部40が、車両の衝突があったか否かを判定する。この判定は、ステップS11で算出した車両の位置座標を利用して行う。車両の衝突があればステップS14に進み、なければステップS15に進む。
【0071】
ステップS14では、統括制御部40が衝突事故件数をカウントするカウンタの計数を1つ増やす。このカウンタの初期値はゼロに設定されている。その後、ステップS15に進む。
【0072】
ステップS15では、統括制御部40が、車両のニアミスがあったか否かを判定する。この判定も、ステップS11で算出した車両の位置座標を利用して行う。車両のニアミスがあればステップS16に進み、なければステップS17に進む。
【0073】
ステップS16では、統括制御部40がニアミス件数をカウントするカウンタの計数を1つ増やす。このカウンタの初期値はゼロに設定されている。その後、ステップS17に進む。
【0074】
ステップS17では、シミュレーション時間が終了時間に到達しているか否かを判定する。終了時間に到達していなければステップS18に進み、到達していればシミュレーションを終了する。
【0075】
ステップS18では、シミュレーション時間を進めてステップS05に戻る。
【0076】
このシミュレーション中のステップS07〜11によって、道路交通環境上に出現している全ての車両が、個別に割り当てられたドライバモデルの特性および車両モデルの特性に従って自律走行を行う。
【0077】
シミュレーション時間が夜間である場合に実行される夜間用可視判定処理(ステップS20)について、図9を用いて説明する。この夜間用可視判定処理は、ドライバ模擬部20の認知部21、車両再現部30および統括制御部40によって実施される。
【0078】
まず、最初のステップS21では、各車両の前照灯の配光データを読み込む。本実施形態では、前照灯の配光はロービーム、ハイビーム、カット式ハイビーム(ADB機能によるロービーム)のうちのいずれか一方である。
【0079】
ステップS22では、自車両の配光をハイビームに設定し、前述のデータテーブル中の配光データを書き換える。なお、ハイビームは基本設定である。
【0080】
ステップS23では、対向車または先行車が存在しているか否かを判断する。対向車および先行車のいずれか一方でも存在していればステップS24に進み、両方とも存在していなければステップS27に進む。
【0081】
ステップS24では、自車両がADBを搭載しているか否かを判定する。搭載していればステップS25に進み、そうでなければステップS26に進む。
【0082】
ステップS25では、対向車の存在する領域および先行車の存在する領域に対してロービームに切り替え(換言すれば、配光を制限し)、データテーブルを書き換える。その後、ステップS27に進む。
【0083】
ステップS26では、自車両の配光をロービームに切り替え、データテーブルを書き換える。その後、ステップS27に進む。
【0084】
ステップS27では、自車両の進行先にある横断歩道上に歩行者が存在しているか否かを判断する。歩行者が存在していればステップS28に進み、存在していなければステップS34に進む。
【0085】
ステップS28では、歩行者の輝度を算出する。この輝度の算出には公知の方法を利用するものとする。
【0086】
ステップS29では、歩行者の背景の輝度を算出する。この背景の輝度の算出にも公知の方法を利用するものとする。
【0087】
ステップS30では、対向車の照明の配光状態による影響を考慮した自車両のドライバの等価光幕輝度を算出する。
【0088】
ステップS31では、ステップS30で算出した等価光幕輝度を考慮して、ステップS28で算出した歩行者の輝度とステップS29で算出した歩行者の背景の輝度とに基づき、歩行者のコントラスト比を算出する。
【0089】
ステップS32では、設定された視野制限フィルタに基づき、ドライバが歩行者を認知可能か否かを判断する。認知可能であればステップS33に進み、そうでなければステップS34に進む。
【0090】
ステップS33では、ステップS32で認知可能であると判断された歩行者を可視物体として記録する。その後、ステップS34に進む。
【0091】
ステップS34では、設定された視野制限フィルタに基づき、ドライバが他車両についての可視判定を行う。この可視判定は、シミュレーション時間が昼間である場合の可視判定と同様である。判定を実施し、全ての可視物体の中から最不安全物体を特定したら、本フローを終了する。
【0092】
<効果>
本実施形態の効果評価シミュレータ1は上述のような構成および作用となっているので、以下のような効果を奏する。
【0093】
効果評価シミュレータ1は、コンピュータ内に実際の道路交通環境と同等の道路交通環境を再現し、この仮想環境上に自律的に運転される車両を走行させ、且つ、全車両のうちの所定の割合(0%〜100%)の車両に前照灯システムを搭載して、所定の期間中シミュレーションを実施することができる。
【0094】
特に、全車両が所定の割合でADB60を搭載しているので、その割合を変化させてシミュレーションすることにより、ADB60の普及率による事故率やニアミス率の低減効果を明らかにすることができる。その結果、効率的且つ効果的な車両安全対策の実施も可能となる。また、シミュレーション時間が夜間である場合には、前照灯の配光や街路灯を含む道路照明環境の設定に基づいて歩行者の輝度および背景輝度並びにドライバの等価光幕輝度を算出するので、より現実に即した歩行者の認知状況を反映したシミュレーションを実施することができる。
【0095】
そして、シミュレーションには、道路交通環境、ドライバおよび車両の3つについて、現実のそれらを論理的に単純化したモデルを用いるので、道路交通環境上に出現するドライバおよび車両にエラー特性を含む個体差を生じさせ、個々の車両が交通ルールにあるときは従い、あるときは無視するという動作を繰り返した結果、事故に至る状況やニアミス状況を容易に発生させることができる。
【0096】
また、効果評価シミュレータ1は視野制限フィルタを備えているので、ドライバのタイプによって可視物体を認知するか否かが異なるという実際の認知エラーの状態を容易に模擬することができる。特に、視野制限フィルタは、水平面上の可視判定の範囲を視野の中心部に限定するフィルタであり、これによって、可視物体が認知されない状態が起こりやすいと考えられる周辺視野部の認知エラーが実現されるという利点がある。
【0097】
[その他]
なお、本発明の効果評価シミュレータ1は、上記した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【0098】
例えば、上記の実施形態では前照灯システムとしてADB60を搭載した例を説明したが、ADB60以外の前照灯システム(例えば、Adaptive Front-lighting System;AFS)を車両に搭載し、そのシステムの導入効果を評価するようにしても良い。
【0099】
また例えば、上記の実施形態では対向車の照明(前照灯)による自車両のドライバの等価光幕輝度を算出したが、対向車の照明に加えて先行車の照明(後部灯火器)によるグレアも考慮して等価光幕輝度を算出しても良い。
【符号の説明】
【0100】
1 前照灯システム効果評価シミュレータ
2 演算処理手段
3 記憶手段
4 入力手段
5 表示手段
10 交通環境再現部
20 ドライバ模擬部
21 認知部
22 判断部
23 操作部
30 車両再現部
40 統括制御部
50 等価光幕輝度算出部
51 水晶体内混濁粒子設定部
52 光源設定部
53 光減衰率・光散乱角演算部
54 模擬光子統計処理部
60 ADB(配光可変型走行ビーム;前照灯システム)
【技術分野】
【0001】
本発明は、道路交通の予防安全支援システムの1つである前照灯システムの導入効果を評価する、前照灯システム効果評価シミュレータに関する。
【背景技術】
【0002】
従来、道路交通の予防安全支援システムとして、アンチロックブレーキシステム(ABS)やレーンキープアシストシステム等、様々なシステムが開発されている。このような様々な予防安全支援システムのうち、実車両に導入されていない、あるいは普及率の低いものに関しては、実際の道路交通の事故統計等からそのシステムの導入効果を評価することができない。そのため、シミュレーションによって実際の道路交通状況(交通流)を再現し、その導入効果を定量的に評価する技術も開発されている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−72809号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年開発が進んでいる予防安全支援システムの1つに、「Adaptive Driving Beam(ADB;配光可変型走行ビーム)」という前照灯配光制御システム(単に「前照灯システム」ともいう)がある。ADBは、例えばルームミラーの裏側に設置したセンサによって対向車のヘッドライトや先行車のテールランプを検知し、対向車や先行車が存在する範囲の前照灯の配光を自動的に制限し、眩惑を防止するものである。このADBは未だ開発・普及段階にあるため、シミュレーションによってその導入効果を評価する技術が求められている。
【0005】
本発明は、斯かる実情に鑑み、前照灯システムの導入効果を定量的に評価することができる、前照灯システム効果評価シミュレータを提供しようとするものである。
【課題を解決するための手段】
【0006】
本発明の前照灯システム効果評価シミュレータは、電子計算機で構成され、実際の交通流を模擬するシミュレーションを予め設定された所定の期間実施する前照灯システム効果評価シミュレータであって、道路交通環境を前記電子計算機内に再現し、また前記道路交通環境に出現する全ての車両および歩行者のタイムスケジュールを作成し、さらに前記道路交通環境に出現する全ての車両に車両特性を個別に割り当てるとともに、前記車両を運転するドライバにドライバ特性を個別に割り当てる交通環境再現部と、前記道路交通環境に出現する各車両を運転するドライバの運転行動を、前記交通環境再現部によって割り当てられた前記ドライバ特性に基づいて個別に模擬するドライバ模擬部と、前記道路交通環境に出現する各車両の挙動を、前記交通環境再現部によって割り当てられた前記車両特性と前記ドライバ模擬部によって模擬された前記運転行動とに基づいて個別に再現する車両再現部と、前記交通環境再現部、前記ドライバ模擬部および前記車両再現部を統括して制御し、前記期間中に発生した事故件数を計測する統括制御部と、を備え、前記交通環境再現部は、前記道路交通環境に出現する全ての車両のうちの所定の割合の車両が前照灯の配光状態を制御可能な前照灯システムを搭載するように前記車両特性を割り当て、前記ドライバ模擬部は、シミュレーション時間が夜間である場合、前記道路交通環境に出現している一の車両に対して対向車が存在しているときに、前記対向車の前照灯の配光状態を考慮して前記一の車両のドライバの等価光幕輝度を算出し、算出された前記等価光幕輝度を用いて当該ドライバが前記歩行者を認知可能か否かを判断することを特徴としている。
【0007】
なお、前記前照灯システムは、前記一の車両に搭載されたセンサによって前記対向車および前記一の車両に対する先行車を検出し、前記一の車両の前照灯による照射範囲について、前記対向車および前記先行車に対する照射を制限する一方、前記歩行者は制限なく照射するように当該照射範囲を調整することが好ましい。
【発明の効果】
【0008】
本発明の前照灯システム効果評価シミュレータによれば、例えばADB等の次世代の前照灯システムの普及率に応じた事故率やニアミス率の低減効果をシミュレーションによって定量的に評価することができる。その結果、効率的且つ効果的な車両安全対策の実施も可能となる。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施形態に係る前照灯システム効果評価シミュレータのハードウェアの全体構成を示すブロック図である。
【図2】本発明の一実施形態に係る前照灯システム効果評価シミュレータのソフトウェアの全体構成を示すブロック図である。
【図3】本発明の一実施形態に係る前照灯システム効果評価シミュレータのドライバ模擬部が設定する視野制限フィルタを示す模式図である。
【図4】本発明の一実施形態に係る前照灯システム効果評価シミュレータの等価光幕輝度算出部の構成を示すブロック図である。
【図5】本発明の一実施形態に係る前照灯システム効果評価シミュレータの等価光幕輝度算出部が等価光幕輝度を算出する方法を示すチャートである。
【図6】本発明の一実施形態に係る前照灯システム効果評価シミュレータの車両再現部が再現する車両が搭載するADBの構成および機能を示す模式図である。
【図7】本発明の一実施形態に係る前照灯システム効果評価シミュレータの交通環境再現部が再現する道路交通環境において、ADBの搭載された車両が配光を制限している具体的な状況を示す模式図である。
【図8】本発明の一実施形態に係る前照灯システム効果評価シミュレータが実施するシミュレーションの概略を示すフローチャートである。
【図9】本発明の一実施形態に係る前照灯システム効果評価シミュレータが実施するシミュレーション中の夜間用可視判定処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態を添付図面を参照して説明する。本実施形態の前照灯システム効果評価シミュレータ(以下、単に「効果評価シミュレータ」ともいう)は、道路交通環境(車道、歩道、街路灯、建造物および街路樹等からなる環境)を電子計算機内に作り出し、ドライバが運転中に行っている認知・判断・操作という行動(運転行動)を模擬して前照灯システムを搭載した車両を上記道路交通環境上に走行させ、時々刻々と変化する道路交通状況(交通流)を再現し、その事故率・ニアミス率から前照灯システムの導入効果を評価することを可能にしたものである。
【0011】
<全体構成>
図1に、本実施形態の効果評価シミュレータ1のハードウェアの全体構成を示す。効果評価シミュレータ1は、コンピュータ等の電子計算機で構成されており、物理的な構成要素として、演算処理手段2としてのCPUと、記憶手段3としてのROM、RAMおよびハードディスクと、入力手段4としてのキーボードおよびマウスと、表示手段4としてのディスプレイと、を備えている。
【0012】
また、図2に、本実施形態の効果評価シミュレータ1のソフトウェアの全体構成を示す。効果評価装置1は、機能的な構成要素として、道路交通環境を再現する交通環境再現部(環境プログラム)10と、ドライバの運転行動を模擬するドライバ模擬部(ドライバプログラム)20と、車両の運動性能・挙動を再現する車両再現部(車両プログラム)30と、それら3つの再現・模擬部10,20,30を統括して制御する統括制御部(統括プログラム)40と、を備えている。
【0013】
上記の各部10,20,30,40はプログラムとして記憶手段3に記憶されており、演算処理手段2が当該プログラムを実行することで、各部10,20,30,40の機能が実現されるようになっている。すなわち、統括制御部40が、効果評価シミュレータ1のシミュレーション全体を制御して、実在する道路交通環境と同等の道路交通環境を三次元の仮想空間として再現し、当該道路交通環境上に車両を自律的に走行させる。そして、自律的に走行している車両や歩行者の相互の位置関係を常に管理・記録し、所定のシミュレーション期間中の事故率およびニアミス率を算出するようになっている。
【0014】
<交通環境再現部;環境モデル>
交通環境再現部10は、予め記憶手段3に記憶された情報(道路情報、道路照明環境情報、建造物情報、街路樹情報等)に基づき、モデル化された道路交通環境(環境モデル)を再現する。道路交通環境は3次元空間で再現され、本実施形態では具体的に以下の4つの特徴を有する交差点を中心とした所定範囲の領域を再現するようにする(当該道路交通環境を2次元で示した図7参照)。
【0015】
(1)信号機のない十字交差点
(2)主流側道路は双方向2車線で横断歩道あり
(3)従流側道路は1車線で横断歩道なし
(4)見通しが悪い
【0016】
なお、交通環境再現部10が再現し、シミュレーションの対象とする道路交通環境は、ここに例示する環境に限定されるものではない。つまり、上記の交差点の特徴は適宜に設定変更可能なものであり、例えば、T字交差点、Y字交差点、変則交差点、5方向交差点、ロータリー交差点、立体交差点等において、信号機の有無、車線の数、横断歩道の有無、見通しの良否等を適宜に設定変更可能である。また、交差点以外の道路が交わらない道路交通環境(例えば、高速道路)を再現しても良い。さらに、複数の交差点や交差点以外の特徴のある道路交通環境(例えば、橋やトンネルやパーキングエリア)を含む広範な道路交通環境を再現しても良い。
【0017】
交通環境再現部10はまた、実際の交通流(以下、単に「実交通流」ともいう)から得た情報(進入方向別交通密度、進入方向別交差点進入速度分布、進入方向別交差点挙動分布、車頭間隔別相対速度分布、信号点消灯時間間隔、信号交差点での直進、右折および左折の進行比率、信号待ち車両の車頭間隔等)に基づき、上記道路交通環境に出現する車両のタイムスケジュールをモンテカルロ法で作成する。上記の実交通流から得た各情報は、シミュレーション期間とともにシミュレーションの初期条件となるものであり、予め記憶手段3に記憶されたデータを利用しても良いし、入力手段4を介してオペレータによってシミュレーション開始時に逐次入力しても良い。
【0018】
車両が出現するタイミングは、周辺の状況に基づき車頭時間を制御するものとする。例えば、再現する道路交通環境に信号交差点が隣接する場合には、そこから流入する交通流は、その信号交差点による赤信号の信号待ち車両によって起こるErlang分布と信号待ちのない車両によって起こる指数分布とが信号周期によって時間差に基づいて混合される。これにより、交通環境再現部10が作り出す交通流は、「交差点進入時の車頭間隔時間」と「交差点進入時の速度」と「交差点を通過するのに要する時間(交差点通過時間)」とが少なくとも実交通流と同等となる。
【0019】
車両のタイムスケジュールには、シミュレーション時間における各車両の出現時刻、各車両の出現位置(初期位置)および最終目的位置、車両の出現時点での速度(初期速度)、が少なくとも設定される。また、上記道路交通環境に出現する歩行者のタイムスケジュールも、車両のタイムスケジュールと同様に、実交通流から得た情報に基づきモンテカルロ法で作成する。
【0020】
交通環境再現部10はさらに、所定の情報(評価対象の前照灯システムの普及率およびドライバの年齢分布等)に基づき、タイムスケジュールに登場する全ての車両に対して車両特性(運動性能)をそれぞれ割り当てるとともに、各車両を運転するドライバに対してドライバ特性(ドライバタイプ、視機能特性、速度認知エラー特性、ブレーキ踏力不足エラー特性)をそれぞれ割り当てる。この特性の割り当てによって、ドライバの運転行動や車両の運動性能が変化し、現実と同様に個体差が生じるようになっている。上記の所定の情報は、予め記憶手段3に記憶されたデータを利用しても良いし、入力手段4を介してオペレータによってシミュレーション開始時に逐次入力しても良い。
【0021】
なお、車両は例えば全長4.4m、全幅1.7m、全高1.45mの直方体形状のポリゴンオブジェクトで道路交通環境上に再現され、建造物、街路樹および停止線等の他の物体も適宜のサイズ・形状のポリゴンオブジェクトで再現される。
【0022】
<ドライバ模擬部;ドライバモデル>
ドライバ模擬部20は、予め記憶手段3に記憶された情報および交通環境再現部10から入力された個々のドライバ特性に基づき、モデル化されたドライバ(ドライバモデル)の運転行動(認知、判断、操作)を再現し、車両の操作量を算出して車両再現部30に出力する。具体的には、ドライバ模擬部20は認知部21と判断部22と操作部23とを備え、他車両や歩行者を認知し、衝突の可能性があるか否かを判断し、衝突の可能性があると判断した場合に具体的な衝突回避操作量(ここではブレーキ操作量)を算出する。
【0023】
<<認知部>>
認知部21は、交通環境再現部10によって割り当てられたドライバ特性に基づき、ドライバごとに「視野制限フィルタ」を個別に設定する。図3に示すように、本実施形態では視野制限フィルタとして、例えば「優良ドライバ型フィルタ」、「確認不十分型フィルタ」および「依存型フィルタ」が備えられている。
【0024】
優良ドライバには優良ドライバ型フィルタが適用される。優良ドライバ型フィルタは、進行方向を中心として±50°(視野角100°)にドライバの可視範囲を制限するフィルタである。ただし、優良ドライバの搭乗する車両が交差点内を走行しているときはフィルタを適用外とし、進行方向を中心として±90°(視野角180°)の範囲がドライバの可視範囲となる。
【0025】
左右確認不十分ドライバには確認不十分型フィルタが適用される。確認不十分型フィルタは、進行方向を中心として±15°(視野角30°)にドライバの可視範囲を制限するフィルタである。ただし、左右確認不十分ドライバの搭乗する車両が交差点内を走行しているときはフィルタを適用外とし、進行方向を中心として±90°(視野角180°)の範囲がドライバの可視範囲となる。
【0026】
先行車両依存ドライバには依存型フィルタが適用される。依存型フィルタは、進行方向を中心として±4°(視野角8°)の範囲(先行車の後部を確認可能な範囲)にドライバの可視範囲を制限するフィルタである。なお、先行車両依存ドライバの搭乗する車両が交差点内を走行しているときにもフィルタは適用され、前述の2つのドライバタイプと異なって可視範囲は拡張されない。
【0027】
なお、上記の交差点内とは、自車両が交差点を直進する場合は、走行する道路と交差する道路とが重なる範囲であり、一方、自車両が交差点を右折または左折する場合は、予め走行している道路上で旋回し始めてから交差する道路上で旋回が終了するまでの範囲であるとする。また、上記の各視野制限フィルタは、ここに例示するフィルタに限定されるものではない。例えば、各視野制限フィルタの可視範囲を決定する視野角は、任意の数値に設定変更可能なものである。また、視野制限フィルタの数は3つに限定されず、少なくとも2つの種類の異なるフィルタを備えていれば良い。より具体的には例えば、第1のフィルタと、第1のフィルタよりも視野角の小さい可視範囲に制限する第2のフィルタとを少なくとも備えていれば好ましい。そして、所定の道路範囲内(本実施形態では交差点内)を自車両が走行する場合は、第1のフィルタは適用外となる一方、第2のフィルタは継続して適用されるものであると好ましい。また例えば、第1のフィルタと、第1のフィルタよりも視野角の小さい可視範囲に制限する第2のフィルタと、第2のフィルタよりも視野角の小さい可視範囲に制限する第3のフィルタとを少なくとも備え、所定の道路範囲内を自車両が走行する場合は、第1および第2のフィルタは適用外となる一方、第3のフィルタは継続して適用されるものであると好ましい。
【0028】
認知部21は、上述のように個別に設定された視野制限フィルタに基づき、自律走行を可能とすべく、ドライバごとに視認可能な自車両の周囲の可視物体を特定する(以下、これを可視判定という)。この可視判定は、各ドライバの視点位置(例えば左右前輪を結ぶ線分の中点から後方へ1.3m、地上高1.2mの位置)の水平面上と垂直面上で行われる。
【0029】
水平面上の可視判定は、自車両の進行方向ベクトルを中心に±90°の範囲内で行われ、道路交通環境上に出現している他車両、歩行者、建造物および街路樹等の物体の中から可視物体を特定する。一方、垂直面上の可視判定は、水平面から下方向に90°の範囲で行われ、道路上にある視認可能な停止線を特定する。このとき、ドライバが視野制限フィルタ内の他車両や歩行者を視認できるか否かは、建造物および街路樹等の障害物による死角についても考慮する。
【0030】
また、認知部21は、交通環境再現部10によって割り当てられたドライバ特性(ドライバの年齢;視機能特性)に基づき、ドライバごとに「等価光幕輝度」を個別に算出する。これは、夜間に暗くて歩行者を認知できなくなるケースを想定したものである。等価光幕輝度はドライバの年齢に左右され、若齢者ドライバの方が眩しさが少ないため、視認性が良好であり、一方、高齢者ドライバは眩しさが強く表れるため、視認性が極めて悪いようになっている。
【0031】
図4および図5を用いて、等価光幕輝度の算出方法について詳述する。認知部21には、図4に示すような等価光幕輝度算出部50が備えられている。等価光幕輝度算出部50は、水晶体内混濁粒子設定部51と、光源設定部52と、光減衰率・光散乱角演算部53と、模擬光子統計処理部54とを有し、図5に示すような解析手法でドライバの年齢に応じて等価光幕輝度を算出する。
【0032】
水晶体内混濁粒子設定部51は、水晶体の光学濃度Tおよび混濁粒子の粒径kを算出する手段である。水晶体内の光学濃度Tは加齢により変化するので、以下の数式(1)および数式(2)で表される加齢変化モデル式を予め記憶手段3にプログラムとして記憶しておく。これらの数式(1)および数式(2)を用いて、交通環境再現部10から入力されるドライバの年齢に基づき、光学濃度情報を生成する。なお、ドライバの年齢が60歳未満の場合には数式(1)を利用し、ドライバが60歳以上の場合には数式(2)を利用する。
【数1】
【数2】
【0033】
数式(1)および(2)において、Aはドライバの年齢、λは波長、L1は水晶体自体の屈折率、L2は水晶体内の混濁粒子の屈折率である。ここでは、水晶体自体の屈折率L1を1.40とし、水晶体内の混濁粒子の屈折率L2を1.55としてプログラムに予め登録しておく。なお、この値は適宜変更することも可能であり、更に加齢状態をふまえて再設定するようにしても良い。
【0034】
また、混濁粒子の粒径kも加齢により変化するので、以下の数式(3)で表される加齢変化モデル式を予め記憶手段3にプログラムとして記憶しておく。この数式(3)を用いて、ドライバの年齢に基づき混濁粒子の粒径kを算出する。なお、粒径k[μm]は1〜7μmの範囲内になるのが通常である。
【数3】
【0035】
光源設定部52は、車両の前照灯の種類、すれ違う際の光軸変動、前照灯と利用者との距離、シミュレーションする時間帯(日中、夜間、夕暮れ)、天候(晴れ、雨、曇り)、道路照明の状態等の情報を、記憶手段に予め記憶され適宜に更新されるデータテーブルから取得し、取得した情報に基づき光源条件を設定してRAM等の記憶手段に格納する手段である。上記の情報は交通環境再現部10から取得する。
【0036】
光減衰率・光散乱角演算部53は、散乱強度I(α,θ)等を算出する手段である。まずMie散乱理論を用いて、単位照度となる平面波が入射する時の散乱強度I(α,θ)および散乱効率Ke(α);(散乱断面積/幾何学断面積)を、散乱角θ、サイズパラメータα=2πr/λ(r:微粒子半径)との関係を定めた以下の数式(4)または数式(5)により算出する。なお、数式(5)におけるavおよびbvは、1次、2次Riccati-Bessel関数ψv、ζv、およびその導関数よりなる。また、Reは実部をとる操作を表す。
【数4】
【数5】
【0037】
各微粒子における散乱特性である散乱強度I(α,θ)や散乱効率Ke(α)が求まれば、以下の数式(6)によって、微粒子が複数個存在する空間での散乱光分布を推定することができる。なお、数式(6)におけるP1v(cosθ)は、Legendre多項式からなっている。
【数6】
【0038】
さらに、散乱効率Ke(α)により、光が大気中を進行した時の減衰係数σ(α)[m−1]を以下の数式(7)を用いて算出する。なお、数式(7)において、na(r)は微粒子濃度分布[個/m3]、f(λ)は光の波長確率密度分布である。
【数7】
【0039】
次いで、この減衰係数σ(α)により、光子が次に散乱するまでの予測距離Lを以下の数式(8)を用いて算出する。なお、数式(8)において、ran1は0〜1の一様乱数である。
【数8】
【0040】
そして、以下の数式(9)の散乱角確率密度分布F(α,θ)により、以下の数式10を用いて各散乱地点における散乱角θを予測する。なお、数式(9)において、w(φ)はφでの立体角である。また、数式(10)において、ran2は0〜1の一様乱数である。
【数9】
【数10】
【0041】
模擬光子統計処理部54は、水晶体内混濁粒子設定部51と光源設定部52と光減衰率・光散乱角演算部53とを統括して制御しながらモンテカルロ法により処理を行い、最終的に光幕輝度分布を算出する手段である。
【0042】
模擬光子統計処理部54は、水晶体内混濁粒子設定部51によって設定された水晶体の条件や光源設定部52によって設定された光源の条件に基づいて、各種光源から眼球へ進入する光子の進入角を決定する。そして、光減衰率・光散乱角演算部53を制御して、その光子が眼球内のどの位置でどの角度に散乱するか、あるいは散乱せずにそのまま網膜に到達するかを1個ずつ確率的に予測する。散乱した場合はさらに次に散乱する位置を予測し、散乱数>最大散乱次数あるいは光子吸収、となるまで試行を続け(なお最大散乱次数は解析結果に影響を与えない十分に大きな数とする)、最終的に網膜に到達する位置および角度(あるいは眼球外に放出すること)を予測していく。この予測を全模擬光子数(全模擬光子数は、解析結果に影響を与えない十分に大きな数とする)に対して試行し、その結果網膜に到達した光子の分布から眼球内光散乱を考慮した網膜像を推定する。つまり、模擬光子1個分の光幕輝度分布を算出し、さらに模擬光子1個分の光幕輝度分布に基づいてドライバの等価光幕輝度を算出する。
【0043】
前述のように、道路交通環境上では各物体をポリゴンオブジェクトとして再現しており、各ドライバは可視物体に対してポリゴンレベルの可視判定を行うことができる。これによって、交差点に向かう各ドライバの可視範囲に塀や植栽等が存在した場合、見通しの悪さを再現することが可能となっている。
【0044】
<<判断部>>
判断部22では、認知部21で特定された可視物体と自車両とが衝突する危険性を判断する。以下、これをリスク判定ともいう。可視物体が複数存在する場合には、すべての可視物体に対して衝突の危険性の度合いを示す不安全度を算出して危険性の順位付けも行い、危険性が最も高い物体を最不安全物体とする。
【0045】
リスク判定では、特定された可視物体の位置および速度に基づいて衝突ポイントに到達するまでの時間(衝突回避可能時間)を算出して用いる。このとき、交通環境再現部10によって各ドライバに割り当てられた速度認知特性(速度認知エラー特性)を考慮し、ヒューマンエラーを含んだ速度の推測値でリスク判定を行う。リスク判定の結果、ドライバが衝突回避行動をとるか否かを決定する。本実施形態では、衝突回避行動はブレーキ操作とする。
【0046】
リスク判定について詳述する。通常、ドライバが感じる衝突の危険性はブレーキペダル踏力に反映されると考えられるため、本実施形態では、不安全度はブレーキを踏むべき対象と判断した物体に対して、そのときに発揮すべきブレーキペダル踏力値をもとに算出する。判断部22はこのリスク判定を時々刻々と行い、最不安全物体との衝突を回避するためのブレーキ操作量を算出する。以下に、不安全度の基準となるブレーキタイミングを決定する判別式と発揮すべきブレーキ操作量(ブレーキペダル踏力値)を算出する式を示す。
【0047】
本実施形態では、リスク判定のプロセスは、状況(交差、追従、右左折)に応じて以下の数式(11)〜(14)によって算出する。ここで、「交差」とは、自車両と最不安全物体とがともに直進して交差点内に進入し、且つ衝突の可能性がある状況である。「追従」とは、自車両が最不安全物体の後方に位置し共に直進する状態で、且つ追突する可能性がある状況である。「右左折」とは、自車両または最不安全物体が右左折している状態で交差点内に進入し、且つ衝突の可能性がある状況である。
【0048】
「交差」におけるブレーキタイミングは、対象車両に対する視角の増加率変化[(1/φ)dφ/dt]を指標とした。また、ブレーキペダル踏力値は、視角の増加率変化に自車速度Vを掛けたものと、[1/(相対距離L)2]とを指標とした。なお、これらの指標の求め方については適宜変更することも可能である。
【0049】
「追従」および「右左折」におけるブレーキタイミングは、車間距離を相対速度で除した値(TTC)の逆数であるiTTCを指標とした。また、ブレーキペダル踏力値は、iTTCに自車速度Vを掛けたものと、[1/(相対距離L)2]とを指標とした。なお、これらの指標の求め方については適宜変更することも可能である。
【0050】
各数式(11)〜(14)の係数値a〜hは、自車両が優先道路および非優先道路のいずれを走行しているかによって異なる値が設定される。この係数値a〜hの違いにより、優先道路を走行している車両が非優先道路を走行している車両に対して優先される挙動を可能にしている。
【0051】
数式(11)は交差時のブレーキタイミングを決定する判別式であり、数式(12)は交差時のブレーキペダル踏力値の算出式であり、数式(13)は追従・右左折時のブレーキタイミングを決定する判別式であり、数式(14)は追従・右左折時のレーキペダル踏力値の算出式である。
【数11】
【数12】
【数13】
【数14】
【0052】
<<操作部>>
操作部23では、判断部22で算出された衝突回避可能時間と停止位置とに対応したブレーキ操作量を決定し、車両再現部30に出力する。なお、ここでも、交通環境再現部10によって各ドライバに割り当てられたブレーキペダルの操作特性(ブレーキ踏力不足エラー特性)を考慮し、ブレーキ踏力不足などの操作エラーを反映されたブレーキ操作量を算出する。
【0053】
<車両再現部;車両モデル>
車両再現部30は、ドライバ模擬部20が出力する運転操作量(ブレーキ操作量)に基づいて、モデル化した車両(車両モデル)の挙動量(減速度等)を演算し、シミュレーション時間における現時刻の位置座標を決定する。決定された各車両の現時刻の位置座標は統括制御部40に出力され、統括制御部40によって後述するデータテーブルが書き換えられる。
【0054】
本実施形態では、車両モデルとして、前後方向移動の自由度および前後のタイヤにおける回転の自由度の計3自由度を有する等価二輪車モデルを用いる。このような等価二輪車モデルによれば、前後の荷重移動とタイヤのスリップを考慮した制動挙動を計算することが可能である。
【0055】
また、本実施形態では、予め記憶手段3に記憶された情報および交通環境再現部10から入力された個々の車両特性に基づいて、道路交通環境上に出現する全車両のうちの所定の割合(0%〜100%)の車両にADB60(図6参照)が搭載されているように設定される。これにより、ADB60が搭載されている車両は、他車両(対向車や先行車)の位置情報に基づいて前照灯の照射範囲を自動的に制限することが可能となっている。また、ADB60が搭載されていない車両は、他車両(対向車や先行車)の位置情報に基づいてロービームとハイビームの切り替えを自動的に設定することが可能となっている。ADB60が作動する条件(例えば、シミュレーション時間が夜間であるとの条件)は、予め設定されているようにする。なお、ADB60の設定については、オペレータが入力手段4を介して任意に変更することも可能なものとする。
【0056】
図6および図7を用いてADB60の構成および機能について説明する。ADB60は、車両に搭載されたセンサ(図示略)によって対向車や先行車を検出し、左右の前照灯61L,61Rによる照射範囲を左右で個別に調整して、対向車や先行車に対する照射を制限する一方、歩行者は照射するものである。ADB60は左右の前照灯61L,61Rそれぞれに対してシェード(遮蔽手段)62L,62Rを備えており、左右の前照灯61L,61Rの前面の一部をシェード62L,62Rで適宜に覆うことで、照射範囲を調整することが可能となっている。
【0057】
<シミュレーション>
図8を用いて、本実施形態のシミュレータ1によるシミュレーションの概略を説明する。シミュレーションは、メインルーチンである統括プログラムを演算処理手段2が実行することで開始される。
【0058】
最初のステップS01では、シミュレーション期間等のシミュレーション条件に係るデータを読み込む。各種のシミュレーション条件はシミュレーション開始前に設定されていれば良く、例えばシミュレーション期間は、前述のように予め記憶手段3に記憶されたデータを利用しても良いし、入力手段4を介してシミュレーション開始時にオペレータによって入力されても良い。具体的なシミュレーション期間は、例えば2592000s(30日間)等の事故統計をとるのに十分な期間に設定されると好ましい。また、ニアミスとは、例えば減速度4.0m/s2が0.2s以上継続し、且つ相対距離が6.0m以内の状態に設定する。このニアミスを判定する数値条件も予め記憶手段3に記憶させておくと好ましいが、オペレータが入力手段4を介して任意に変更することも可能なものとする。
【0059】
ステップS02では、統括制御部40が、車両やドライバの特性に係るデータを記憶手段3から読み込む。
【0060】
ステップS03では、交通環境再現部10が、ステップS01およびS02で読み込んだデータに基づいて、モデル化された道路交通環境を三次元仮想空間として構築する。構築された道路交通環境は表示装置5に表示される。また、以下のステップS04〜S18により、当該道路交通環境上に車両や歩行者が時々刻々と出現し、通行するようになるが、その状況も表示装置5に表示される。これにより、オペレータは再現された交通流の状況をシミュレーション期間全体に亘って観察し、把握することが可能となっている。
【0061】
ステップS04では、交通環境再現部10が、ステップS01およびS02で読み込んだデータに基づいて、移動体(車両および歩行者)のタイムスケジュールを作成する。
【0062】
ステップS05では、統括制御部40が、ステップS04で作成されたタイムスケジュールに基づいて、現時点のシミュレーション時間(以下、「現時刻」ともいう)の道路交通環境上に車両および歩行者を出現させる。
【0063】
ステップS06では、統括制御部40が、現在出現している全ての車両についてのデータテーブルを作成する。
【0064】
ステップS07では、統括制御部40が、現時刻が夜間であるか否かを判定する。夜間であればステップS20に進み、そうでなければステップS08に進む。
【0065】
ステップS08では、ドライバ模擬部20の認知部21が、現時刻に出現している全ての車両のうちの任意に指定された車両(例えば、各車両に識別番号を付している場合、その識別番号が最も小さい車両)のドライバについて可視判定を行い、可視物体(他車両および歩行者等)を抽出する。可視判定は、ドライバに適用されている視野制限フィルタに応じて行う。
【0066】
ステップS09では、ドライバ模擬部20の判断部22が、ステップS08で抽出された全ての可視物体についてリスク判定を行い、最不安全物体を特定する。そして、特定された最不安全物体についての衝突回避行動を含む運転行動を決定する。
【0067】
ステップS10では、ドライバ模擬部20の操作部23が、車両操作量を算出する。特に、ステップS09で衝突回避行動をとると判断されたドライバについては、車両操作量としてブレーキ操作量を算出する。算出した車両操作量は車両再現部30に入力する。
【0068】
ステップS11では、車両再現部30が、ステップS10で算出された車両操作量に基づき当該車両の位置座標を算出する。算出した位置座標は統括制御部40に入力する。統括制御部40は、この位置座標を現時刻(次時刻でも良い)の位置座標としてデータテーブルを書き換える。
【0069】
ステップS12では、統括制御部40が、現時刻の道路交通環境上に現時刻(次時刻でも良い)の位置座標の算出が終了していない車両が他に存在しているか否かを判定する。車両が他に存在していればステップS07に戻り、次の車両(例えば、識別番号が次に小さい車両)についてステップS07〜S11の処理を行う。車両全てについて現時刻(次時刻でも良い)の位置座標の算出が終了すればステップS13に進む。
【0070】
ステップS13では、統括制御部40が、車両の衝突があったか否かを判定する。この判定は、ステップS11で算出した車両の位置座標を利用して行う。車両の衝突があればステップS14に進み、なければステップS15に進む。
【0071】
ステップS14では、統括制御部40が衝突事故件数をカウントするカウンタの計数を1つ増やす。このカウンタの初期値はゼロに設定されている。その後、ステップS15に進む。
【0072】
ステップS15では、統括制御部40が、車両のニアミスがあったか否かを判定する。この判定も、ステップS11で算出した車両の位置座標を利用して行う。車両のニアミスがあればステップS16に進み、なければステップS17に進む。
【0073】
ステップS16では、統括制御部40がニアミス件数をカウントするカウンタの計数を1つ増やす。このカウンタの初期値はゼロに設定されている。その後、ステップS17に進む。
【0074】
ステップS17では、シミュレーション時間が終了時間に到達しているか否かを判定する。終了時間に到達していなければステップS18に進み、到達していればシミュレーションを終了する。
【0075】
ステップS18では、シミュレーション時間を進めてステップS05に戻る。
【0076】
このシミュレーション中のステップS07〜11によって、道路交通環境上に出現している全ての車両が、個別に割り当てられたドライバモデルの特性および車両モデルの特性に従って自律走行を行う。
【0077】
シミュレーション時間が夜間である場合に実行される夜間用可視判定処理(ステップS20)について、図9を用いて説明する。この夜間用可視判定処理は、ドライバ模擬部20の認知部21、車両再現部30および統括制御部40によって実施される。
【0078】
まず、最初のステップS21では、各車両の前照灯の配光データを読み込む。本実施形態では、前照灯の配光はロービーム、ハイビーム、カット式ハイビーム(ADB機能によるロービーム)のうちのいずれか一方である。
【0079】
ステップS22では、自車両の配光をハイビームに設定し、前述のデータテーブル中の配光データを書き換える。なお、ハイビームは基本設定である。
【0080】
ステップS23では、対向車または先行車が存在しているか否かを判断する。対向車および先行車のいずれか一方でも存在していればステップS24に進み、両方とも存在していなければステップS27に進む。
【0081】
ステップS24では、自車両がADBを搭載しているか否かを判定する。搭載していればステップS25に進み、そうでなければステップS26に進む。
【0082】
ステップS25では、対向車の存在する領域および先行車の存在する領域に対してロービームに切り替え(換言すれば、配光を制限し)、データテーブルを書き換える。その後、ステップS27に進む。
【0083】
ステップS26では、自車両の配光をロービームに切り替え、データテーブルを書き換える。その後、ステップS27に進む。
【0084】
ステップS27では、自車両の進行先にある横断歩道上に歩行者が存在しているか否かを判断する。歩行者が存在していればステップS28に進み、存在していなければステップS34に進む。
【0085】
ステップS28では、歩行者の輝度を算出する。この輝度の算出には公知の方法を利用するものとする。
【0086】
ステップS29では、歩行者の背景の輝度を算出する。この背景の輝度の算出にも公知の方法を利用するものとする。
【0087】
ステップS30では、対向車の照明の配光状態による影響を考慮した自車両のドライバの等価光幕輝度を算出する。
【0088】
ステップS31では、ステップS30で算出した等価光幕輝度を考慮して、ステップS28で算出した歩行者の輝度とステップS29で算出した歩行者の背景の輝度とに基づき、歩行者のコントラスト比を算出する。
【0089】
ステップS32では、設定された視野制限フィルタに基づき、ドライバが歩行者を認知可能か否かを判断する。認知可能であればステップS33に進み、そうでなければステップS34に進む。
【0090】
ステップS33では、ステップS32で認知可能であると判断された歩行者を可視物体として記録する。その後、ステップS34に進む。
【0091】
ステップS34では、設定された視野制限フィルタに基づき、ドライバが他車両についての可視判定を行う。この可視判定は、シミュレーション時間が昼間である場合の可視判定と同様である。判定を実施し、全ての可視物体の中から最不安全物体を特定したら、本フローを終了する。
【0092】
<効果>
本実施形態の効果評価シミュレータ1は上述のような構成および作用となっているので、以下のような効果を奏する。
【0093】
効果評価シミュレータ1は、コンピュータ内に実際の道路交通環境と同等の道路交通環境を再現し、この仮想環境上に自律的に運転される車両を走行させ、且つ、全車両のうちの所定の割合(0%〜100%)の車両に前照灯システムを搭載して、所定の期間中シミュレーションを実施することができる。
【0094】
特に、全車両が所定の割合でADB60を搭載しているので、その割合を変化させてシミュレーションすることにより、ADB60の普及率による事故率やニアミス率の低減効果を明らかにすることができる。その結果、効率的且つ効果的な車両安全対策の実施も可能となる。また、シミュレーション時間が夜間である場合には、前照灯の配光や街路灯を含む道路照明環境の設定に基づいて歩行者の輝度および背景輝度並びにドライバの等価光幕輝度を算出するので、より現実に即した歩行者の認知状況を反映したシミュレーションを実施することができる。
【0095】
そして、シミュレーションには、道路交通環境、ドライバおよび車両の3つについて、現実のそれらを論理的に単純化したモデルを用いるので、道路交通環境上に出現するドライバおよび車両にエラー特性を含む個体差を生じさせ、個々の車両が交通ルールにあるときは従い、あるときは無視するという動作を繰り返した結果、事故に至る状況やニアミス状況を容易に発生させることができる。
【0096】
また、効果評価シミュレータ1は視野制限フィルタを備えているので、ドライバのタイプによって可視物体を認知するか否かが異なるという実際の認知エラーの状態を容易に模擬することができる。特に、視野制限フィルタは、水平面上の可視判定の範囲を視野の中心部に限定するフィルタであり、これによって、可視物体が認知されない状態が起こりやすいと考えられる周辺視野部の認知エラーが実現されるという利点がある。
【0097】
[その他]
なお、本発明の効果評価シミュレータ1は、上記した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【0098】
例えば、上記の実施形態では前照灯システムとしてADB60を搭載した例を説明したが、ADB60以外の前照灯システム(例えば、Adaptive Front-lighting System;AFS)を車両に搭載し、そのシステムの導入効果を評価するようにしても良い。
【0099】
また例えば、上記の実施形態では対向車の照明(前照灯)による自車両のドライバの等価光幕輝度を算出したが、対向車の照明に加えて先行車の照明(後部灯火器)によるグレアも考慮して等価光幕輝度を算出しても良い。
【符号の説明】
【0100】
1 前照灯システム効果評価シミュレータ
2 演算処理手段
3 記憶手段
4 入力手段
5 表示手段
10 交通環境再現部
20 ドライバ模擬部
21 認知部
22 判断部
23 操作部
30 車両再現部
40 統括制御部
50 等価光幕輝度算出部
51 水晶体内混濁粒子設定部
52 光源設定部
53 光減衰率・光散乱角演算部
54 模擬光子統計処理部
60 ADB(配光可変型走行ビーム;前照灯システム)
【特許請求の範囲】
【請求項1】
電子計算機で構成され、実際の交通流を模擬するシミュレーションを予め設定された所定の期間実施する前照灯システム効果評価シミュレータであって、
道路交通環境を前記電子計算機内に再現し、また前記道路交通環境に出現する全ての車両および歩行者のタイムスケジュールを作成し、さらに前記道路交通環境に出現する全ての車両に車両特性を個別に割り当てるとともに、前記車両を運転するドライバにドライバ特性を個別に割り当てる交通環境再現部と、
前記道路交通環境に出現する各車両を運転するドライバの運転行動を、前記交通環境再現部によって割り当てられた前記ドライバ特性に基づいて個別に模擬するドライバ模擬部と、
前記道路交通環境に出現する各車両の挙動を、前記交通環境再現部によって割り当てられた前記車両特性と前記ドライバ模擬部によって模擬された前記運転行動とに基づいて個別に再現する車両再現部と、
前記交通環境再現部、前記ドライバ模擬部および前記車両再現部を統括して制御し、前記期間中に発生した事故件数を計測する統括制御部と、を備え、
前記交通環境再現部は、
前記道路交通環境に出現する全ての車両のうちの所定の割合の車両が前照灯の配光状態を制御可能な前照灯システムを搭載するように前記車両特性を割り当て、
前記ドライバ模擬部は、
シミュレーション時間が夜間である場合、前記道路交通環境に出現している一の車両に対して対向車が存在しているときに、前記対向車の前照灯の配光状態を考慮して前記一の車両のドライバの等価光幕輝度を算出し、算出された前記等価光幕輝度を用いて当該ドライバが前記歩行者を認知可能か否かを判断する
ことを特徴とする、前照灯システム効果評価シミュレータ。
【請求項2】
前記前照灯システムは、
前記一の車両に搭載されたセンサによって前記対向車および前記一の車両に対する先行車を検出し、前記一の車両の前照灯による照射範囲について、前記対向車および前記先行車に対する照射を制限する一方、前記歩行者は制限なく照射するように当該照射範囲を調整する
ことを特徴とする、請求項1に記載の前照灯システム効果評価シミュレータ。
【請求項1】
電子計算機で構成され、実際の交通流を模擬するシミュレーションを予め設定された所定の期間実施する前照灯システム効果評価シミュレータであって、
道路交通環境を前記電子計算機内に再現し、また前記道路交通環境に出現する全ての車両および歩行者のタイムスケジュールを作成し、さらに前記道路交通環境に出現する全ての車両に車両特性を個別に割り当てるとともに、前記車両を運転するドライバにドライバ特性を個別に割り当てる交通環境再現部と、
前記道路交通環境に出現する各車両を運転するドライバの運転行動を、前記交通環境再現部によって割り当てられた前記ドライバ特性に基づいて個別に模擬するドライバ模擬部と、
前記道路交通環境に出現する各車両の挙動を、前記交通環境再現部によって割り当てられた前記車両特性と前記ドライバ模擬部によって模擬された前記運転行動とに基づいて個別に再現する車両再現部と、
前記交通環境再現部、前記ドライバ模擬部および前記車両再現部を統括して制御し、前記期間中に発生した事故件数を計測する統括制御部と、を備え、
前記交通環境再現部は、
前記道路交通環境に出現する全ての車両のうちの所定の割合の車両が前照灯の配光状態を制御可能な前照灯システムを搭載するように前記車両特性を割り当て、
前記ドライバ模擬部は、
シミュレーション時間が夜間である場合、前記道路交通環境に出現している一の車両に対して対向車が存在しているときに、前記対向車の前照灯の配光状態を考慮して前記一の車両のドライバの等価光幕輝度を算出し、算出された前記等価光幕輝度を用いて当該ドライバが前記歩行者を認知可能か否かを判断する
ことを特徴とする、前照灯システム効果評価シミュレータ。
【請求項2】
前記前照灯システムは、
前記一の車両に搭載されたセンサによって前記対向車および前記一の車両に対する先行車を検出し、前記一の車両の前照灯による照射範囲について、前記対向車および前記先行車に対する照射を制限する一方、前記歩行者は制限なく照射するように当該照射範囲を調整する
ことを特徴とする、請求項1に記載の前照灯システム効果評価シミュレータ。
【図1】

【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】

【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−221414(P2012−221414A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−89379(P2011−89379)
【出願日】平成23年4月13日(2011.4.13)
【特許番号】特許第4900628号(P4900628)
【特許公報発行日】平成24年3月21日(2012.3.21)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度、国土交通省、事故分析と対策の効果評価のためのシミュレーション手法の開発に関する委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(301028761)独立行政法人交通安全環境研究所 (55)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月13日(2011.4.13)
【特許番号】特許第4900628号(P4900628)
【特許公報発行日】平成24年3月21日(2012.3.21)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度、国土交通省、事故分析と対策の効果評価のためのシミュレーション手法の開発に関する委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(301028761)独立行政法人交通安全環境研究所 (55)
【Fターム(参考)】
[ Back to top ]