
単軌条運搬機の停止位置自動制御装置
【課題】非乗用の単軌条運搬機において、軌条中間の任意の位置で安全に機体を停止させることができる。
【解決手段】軌条30の上を走行する走行機体10と走行機体10に連結されて軌条の上を移動する荷物台車20を備えた単軌条運搬機1に装備される停止位置自動制御装置であり、軌条30の側方における任意の停止位置に配備される停止位置指示板40と、走行機体10又は荷物台車20に設けられ停止位置指示板40を検知して検知信号を出力する停止位置検知センサ41と、走行機体10又は荷物台車20に設けられ検知信号に基づいて停止動作信号を出力する制御部42と、停止動作信号に基づいて走行機体10の走行停止レバー14を停止位置に操作するレバー操作部43を備える。
【解決手段】軌条30の上を走行する走行機体10と走行機体10に連結されて軌条の上を移動する荷物台車20を備えた単軌条運搬機1に装備される停止位置自動制御装置であり、軌条30の側方における任意の停止位置に配備される停止位置指示板40と、走行機体10又は荷物台車20に設けられ停止位置指示板40を検知して検知信号を出力する停止位置検知センサ41と、走行機体10又は荷物台車20に設けられ検知信号に基づいて停止動作信号を出力する制御部42と、停止動作信号に基づいて走行機体10の走行停止レバー14を停止位置に操作するレバー操作部43を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、単軌条運搬機の停止位置を任意に設定でき、且つ設定された停止位置で自動停止が可能な単軌条運搬機の停止位置自動制御装置に関するものである。
【背景技術】
【0002】
単軌条運搬機は、農業用或いは工場内の運搬作業を行う機械として広く普及している。特に、傾斜地の果樹園などでは登降坂方向の運搬作業に用いられており、調整作業や収穫作業、資材搬送作業などの労力軽減に多大な効果を発揮している。
【0003】
非乗用の単軌条運搬機は、一般に、軌条(レール)の上を走行する走行機体と、この走行機体に連結されて軌条の上を走行する荷物台車を備えている。走行機体は、エンジンを搭載しており、エンジンの出力軸の回転を駆動輪に伝達する遠心クラッチやミッション等の動力伝達部を備えている。駆動輪は軌条に延設されるラックに噛み合うピニオンを備えるものが多い。
【0004】
このような単軌条運搬機は、手動又は軌条に設けられるストッパー受けによって操作される走行停止レバーを備えている。この走行停止レバーは、レバーの走行位置でエンジンの定格回転を出力させて遠心クラッチを接続状態にし、エンジンの出力軸の回転を駆動輪に伝えて機体を走行させる。一方、レバーを回動操作して停止位置にすると、エンジンの出力が低下して遠心クラッチが切断状態になり、またこのレバー操作と連動してブレーキ機構が作動するなどして機体を停止させることができる(下記特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−36842号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
非乗用の単軌条運搬機は、従来、軌条の始点位置と終点位置に設けたストッパー受けが走行停止レバーに接触することでレバー操作がなされて、走行機体を停止させるものが一般的である。また、始点位置又は終点位置では、走行停止レバーを手動で走行位置に操作することで走行機体を走行させる。一般的にストッパー受けは軌条の両端に設けられるものであり、荷下ろし位置での停止や軌条からの脱落防止のために設けられている。したがって、軌条の中間位置で走行機体を停止させるには、走行中の機体に手を伸ばして走行停止レバーを手動操作するしかなく、操作の安全性に問題があると共に、作業者が求める任意の停止位置に精度良く停止させることが困難な問題がある。
【0007】
一方、軌条に設けるストッパー受けを軌条の中間位置に設置して、走行機体を停止させようとすると、作業を行わない場合にもストッパー受けを設けた位置全てで機体が停止することになり、運搬作業を含めた全体の作業効率が著しく低下することになる。また、ストッパー受けは軌条の支柱などに半固定的に設けられるので、作業者が要求する任意の位置で機体を停止させることができない問題がある。
【0008】
本発明は、このような問題に対処することを課題の一例とするものである。すなわち、単軌条運搬機において、軌条中間の任意の位置で安全に機体を停止させることができること、作業者が走行機体の停止位置を積み込み作業などの必要に応じて任意に変更することができること、等が本発明の目的である。
【課題を解決するための手段】
【0009】
このような目的を達成するために、本発明による単軌条運搬機の停止位置自動制御装置は、以下の構成を少なくとも具備するものである。
運搬経路に敷設された軌条の上を走行する走行機体と該走行機体に連結されて前記軌条の上を移動する荷物台車を備え、前記走行機体が備える走行停止レバーの操作によって前記走行機体を走行又は停止させる単軌条運搬機の停止位置自動制御装置であって、前記軌条の側方における任意の停止位置に配備される停止位置指示板と、前記走行機体又は前記荷物台車に設けられ、前記走行機体又は前記荷物台車が前記停止位置指示板に近接したことを検知して検知信号を出力する停止位置検知センサと、前記走行機体又は前記荷物台車に設けられ、前記検知信号に基づいて停止動作信号を出力する制御部と、前記停止動作信号に基づいて前記走行停止レバーを停止位置に操作するレバー操作部とを備える。
【発明の効果】
【0010】
このような特徴を有する単軌条運搬機の停止位置自動制御装置によると、非乗用の単軌条運搬機であっても、軌条中間の任意の位置で安全に機体を停止させることができる。また、停止位置指示板の位置を任意に設定することで、作業者が機体の停止位置を積み込み作業などの必要に応じて任意に変更することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態に係る単軌条運搬機の停止位置自動制御装置を説明する説明図である。
【図2】本発明の一実施形態に係る単軌条運搬機の停止位置自動制御装置を説明する説明図である。
【図3】本発明の停止位置自動制御装置におけるレバー操作部による走行停止レバーの操作例を示した説明図である。
【図4】本発明の一実施形態に係る単軌条運搬機の停止位置自動制御装置の動作を説明する説明図である。
【発明を実施するための形態】
【0012】
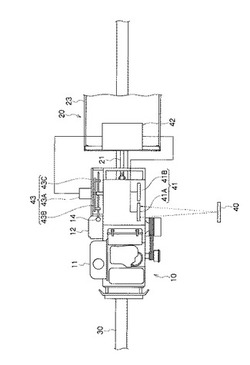
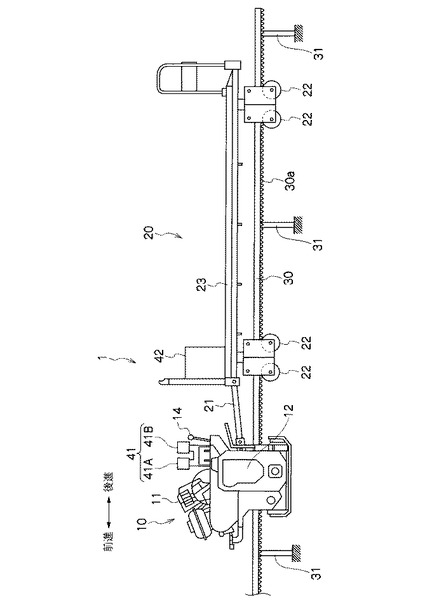
以下、図面を参照しながら本発明の実施形態を説明する。図1及び図2は、本発明の一実施形態に係る単軌条運搬機の停止位置自動制御装置を説明する説明図であり、図1は側面視の説明図、図2は平面視の説明図を示している。
【0013】
単軌条運搬機1は、従来公知のもので走行機体10と荷物台車20を備えており、搬送経路に敷設された軌条(レール)30の上を走行・移動するものである。軌条30は、所定の間隔で支柱31を設けるなどして地面の上に一列敷設されており、図示の例では軌条30の下部にラック30aが設けられている。
【0014】
走行機体10は、エンジン11とエンジン11の出力軸の回転を駆動輪に伝える動力伝達部12を備えている。駆動輪(図3参照の符号13)は、軌条30のラック30aに噛み合うピニオンを備えている。また、走行機体10は、走行停止レバー14を備えている。走行停止レバー14は、走行位置でエンジン11の定格回転を出力させて、動力伝達部12の遠心クラッチを接続状態にし、エンジン11の出力軸の回転を駆動輪13に伝えて走行機体10を走行させる。走行停止レバー14を回動操作して停止位置にすると、エンジン11の出力が低下して遠心クラッチが切断状態になり、走行機体10を停止させることができる。また、動力伝達部12は図示省略したレバー操作で前後進の切り替えが可能で有り、走行機体10はこの切り替え操作によって前進又は後進が可能になっている。荷物台車20は、連結部材21で走行機体10に連結しており、軌条30のラック30aに噛み合うピニオン輪22と荷台23を備えている。
【0015】
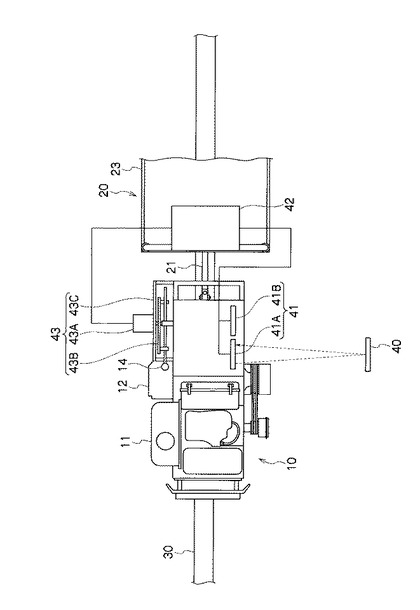
このような既存の単軌条運搬機1に装備される停止位置自動制御装置は、停止位置指示板40、停止位置検知センサ41、制御部42、レバー操作部43を備えている。停止位置指示板40は軌条30の側方における任意の停止位置に配備されるものであり、作業者が求める軌条30の中間停止位置に停止位置指示板40を配備する。この停止位置指示板40は、例えば、積み込み作業位置に集積したコンテナなどの側面に設置してもよいし、また、地面に容易に位置変更可能な支柱を立てて、その支柱に取り付けてもよい。
【0016】
停止位置検知センサ41は走行機体10又は荷物台車20に設けられ、走行機体10又は荷物台車20が停止位置指示板40に近接したことを検知できるものであればよい。例えば、停止位置指示板40を反射板にし、停止位置検知センサ41を反射板への投光及び反射光検出を行う光電センサにすることで、走行機体10又は荷物台車20が反射板に近接したことを光電センサで検知することができる。図示の例では、走行機体10の走行方向に沿って一対の停止位置検知センサ41A,41Bを備えている。これによると、制御部42は、一方の停止位置検知センサ41Aが停止位置指示板40を検知した場合には前進時であり、他方の停止位置検知センサ41Bが停止位置指示板40を検知した場合には後進時であることを認識することができる。
【0017】
制御部42は、走行機体10又は荷物台車20に設けられ、停止位置検知センサ41が出力する検知信号に基づいて停止動作信号を出力する。図示の例では荷物台車20に制御部42を配備しているが、これに限らず走行機体10や走行機体10と荷物台車20との中間位置に制御部42を配備してもよい。制御部42は、停止位置検知センサ41やレバー操作部43、制御部42自身を駆動するための電源を備えている。
【0018】
レバー操作部43は、制御部42の停止動作信号に基づいて走行停止レバー14を停止位置に操作するものであり、制御部42の停止動作信号によって回動するモータ43Aと、モータ43Aの回転で走行停止レバー14を停止位置に回動する操作板43Bと、モータ43Aを走行機体10に装着するブラケット43Cを備えている。
【0019】
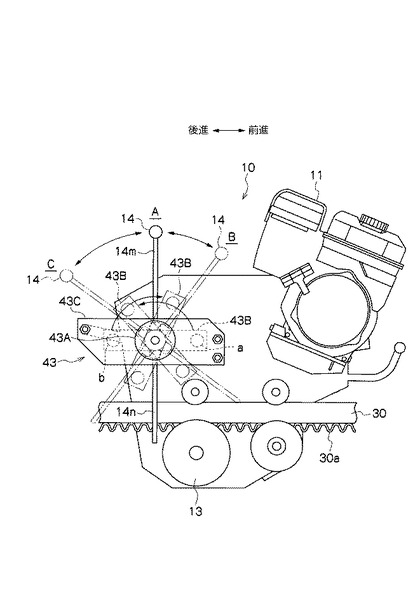
図3は、レバー操作部43による走行停止レバーの操作例を示した説明図である。走行停止レバー14は、図示Aの操作位置が走行位置であり、図示Bの操作位置が前進時の停止位置、図示Cの操作位置が後進時の停止位置である。図示の例では、走行停止レバー14は手動操作レバー14mとストッパー接触レバー14nを一体に備えている。手動操作レバー14mは手動操作で前述した走行位置と停止位置を切り替え操作するものである。ストッパー接触レバー14nは、軌条30の両端に設けたストッパー受けに接触することで操作されるものである。レバー操作部43は、手動操作レバー14mとストッパー接触レバー14nを一体に回動させて走行位置と停止位置を切り替える。
【0020】
図示したレバー操作部43の構造を具体的に説明すると、モータ43Aの回転軸が走行停止レバー14の回動軸と一致するように、ブラケット43Cを介してモータ43Aを走行機体10に装着し、モータ43Aの回転軸に操作板43Bを装着する。操作板43Bは一対の突起部a,bを有しており、この突起部a,bがそれぞれ手動操作レバー14mとストッパー接触レバー14nに当接するようになっている。操作板43Bがモータ41Aによって回動することで、突起部a,bが手動操作レバー14mとストッパー接触レバー14nを押して走行操作レバー14が回動する。
【0021】
図示の例では、制御部42は走行機体10が前進時にはモータ43Aを右回転させる停止動作信号を出力し、水平な原点位置にある操作板43Bを右回転させて走行停止レバー14を図示Aの操作位置から図示Bの操作位置に回動する。また、走行機体10が後進時にはモータ43Aを左回転させる停止動作信号を出力して、水平な原点位置にある操作板43Bを左回転させて走行停止レバー14を図示Aの操作位置から図示Cの操作位置に回動する。
【0022】
そして、制御部42は、一回の停止動作信号を出力してモータ43Aによって操作板43Bを左右に回動させる毎に、操作板43Bを水平な原点位置に戻すようにモータ43Aを回転させる。これによって、走行停止レバー14の手動操作時や走行停止レバー14がストッパー受けで操作される際に操作板43Bが干渉するのを回避している。
【0023】
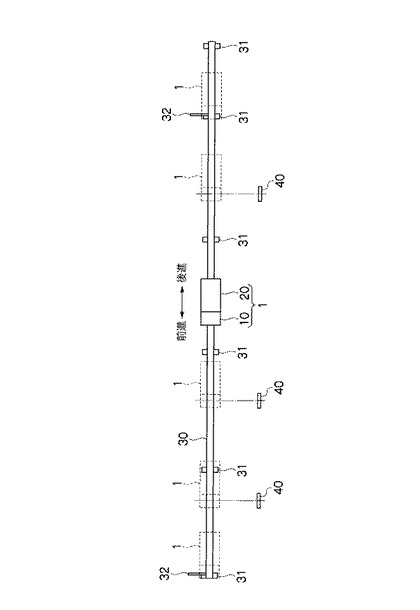
図4は、本発明の一実施形態に係る単軌条運搬機の停止位置自動制御装置の動作を説明する説明図である。支柱31で支持されて運搬経路に敷設された軌条30は、その始点位置と終点位置の近傍にストッパー受け32が設けられている。前述したストッパー接触レバー14nがストッパー受け32に接触することで、走行機体10と荷物台車20を備える単軌条運搬機1は軌条30の両端で停止することができる。
【0024】
一方、軌条30の側方には、作業者が選択する任意の中間位置に停止位置指示板40が配置されている。これによって、単軌条運搬機1は、前述した停止位置自動制御装置の機能によって、停止位置指示板40と近接する位置で自動停止することができる。停止位置指示板40の位置は軌条30に沿った任意の位置に変更することができるので、軌条30の中間位置における任意の位置で単軌条運搬機1を自動停止させることが可能になる。所望の停止位置で単軌条運搬機1を停止させた後は、必要な作業を行った後、作業者が走行停止レバー14を走行位置に戻す手動操作を行うことで単軌条運搬機1の再走行が可能になる。
【0025】
このような停止位置自動制御装置を設けることで、非乗用の単軌条運搬機1を軌条30の任意の位置で安全に自動停止させることができる。また、この停止位置自動制御装置は、単軌条運搬機1が備える既存の走行停止レバー14の機能をそのまま生かしており、操作板43Bは停止操作を行った後は走行停止レバー14に干渉しない水平な原点位置に戻る機構になっているので、走行停止レバー14の手動操作による走行開始操作や、ストッパー受け32による走行機体10の停止操作を併せて行うことができる。
【0026】
また、制御部42には各種のシーケンス制御を組み込むことが可能である。一例を挙げると、停止位置指示板40を複数設置し、停止位置指示板40の通過数を指定することにより、所定の位置に単軌条運搬機1を自動停止させることなどが可能である。
【符号の説明】
【0027】
1:単軌条運搬機,
10:走行機体,11:エンジン,12:動力伝達部,13:駆動輪,
14:走行停止レバー,
20:荷物台車,
30:軌条,31:支柱,32:ストッパー受け,
40:停止位置指示板(反射板),
41(41A,41B):停止位置検知センサ(光電センサ),
42:制御部,
43:レバー操作部,
43A:モータ,43B:操作板,43C:ブラケット,
【技術分野】
【0001】
本発明は、単軌条運搬機の停止位置を任意に設定でき、且つ設定された停止位置で自動停止が可能な単軌条運搬機の停止位置自動制御装置に関するものである。
【背景技術】
【0002】
単軌条運搬機は、農業用或いは工場内の運搬作業を行う機械として広く普及している。特に、傾斜地の果樹園などでは登降坂方向の運搬作業に用いられており、調整作業や収穫作業、資材搬送作業などの労力軽減に多大な効果を発揮している。
【0003】
非乗用の単軌条運搬機は、一般に、軌条(レール)の上を走行する走行機体と、この走行機体に連結されて軌条の上を走行する荷物台車を備えている。走行機体は、エンジンを搭載しており、エンジンの出力軸の回転を駆動輪に伝達する遠心クラッチやミッション等の動力伝達部を備えている。駆動輪は軌条に延設されるラックに噛み合うピニオンを備えるものが多い。
【0004】
このような単軌条運搬機は、手動又は軌条に設けられるストッパー受けによって操作される走行停止レバーを備えている。この走行停止レバーは、レバーの走行位置でエンジンの定格回転を出力させて遠心クラッチを接続状態にし、エンジンの出力軸の回転を駆動輪に伝えて機体を走行させる。一方、レバーを回動操作して停止位置にすると、エンジンの出力が低下して遠心クラッチが切断状態になり、またこのレバー操作と連動してブレーキ機構が作動するなどして機体を停止させることができる(下記特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−36842号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
非乗用の単軌条運搬機は、従来、軌条の始点位置と終点位置に設けたストッパー受けが走行停止レバーに接触することでレバー操作がなされて、走行機体を停止させるものが一般的である。また、始点位置又は終点位置では、走行停止レバーを手動で走行位置に操作することで走行機体を走行させる。一般的にストッパー受けは軌条の両端に設けられるものであり、荷下ろし位置での停止や軌条からの脱落防止のために設けられている。したがって、軌条の中間位置で走行機体を停止させるには、走行中の機体に手を伸ばして走行停止レバーを手動操作するしかなく、操作の安全性に問題があると共に、作業者が求める任意の停止位置に精度良く停止させることが困難な問題がある。
【0007】
一方、軌条に設けるストッパー受けを軌条の中間位置に設置して、走行機体を停止させようとすると、作業を行わない場合にもストッパー受けを設けた位置全てで機体が停止することになり、運搬作業を含めた全体の作業効率が著しく低下することになる。また、ストッパー受けは軌条の支柱などに半固定的に設けられるので、作業者が要求する任意の位置で機体を停止させることができない問題がある。
【0008】
本発明は、このような問題に対処することを課題の一例とするものである。すなわち、単軌条運搬機において、軌条中間の任意の位置で安全に機体を停止させることができること、作業者が走行機体の停止位置を積み込み作業などの必要に応じて任意に変更することができること、等が本発明の目的である。
【課題を解決するための手段】
【0009】
このような目的を達成するために、本発明による単軌条運搬機の停止位置自動制御装置は、以下の構成を少なくとも具備するものである。
運搬経路に敷設された軌条の上を走行する走行機体と該走行機体に連結されて前記軌条の上を移動する荷物台車を備え、前記走行機体が備える走行停止レバーの操作によって前記走行機体を走行又は停止させる単軌条運搬機の停止位置自動制御装置であって、前記軌条の側方における任意の停止位置に配備される停止位置指示板と、前記走行機体又は前記荷物台車に設けられ、前記走行機体又は前記荷物台車が前記停止位置指示板に近接したことを検知して検知信号を出力する停止位置検知センサと、前記走行機体又は前記荷物台車に設けられ、前記検知信号に基づいて停止動作信号を出力する制御部と、前記停止動作信号に基づいて前記走行停止レバーを停止位置に操作するレバー操作部とを備える。
【発明の効果】
【0010】
このような特徴を有する単軌条運搬機の停止位置自動制御装置によると、非乗用の単軌条運搬機であっても、軌条中間の任意の位置で安全に機体を停止させることができる。また、停止位置指示板の位置を任意に設定することで、作業者が機体の停止位置を積み込み作業などの必要に応じて任意に変更することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態に係る単軌条運搬機の停止位置自動制御装置を説明する説明図である。
【図2】本発明の一実施形態に係る単軌条運搬機の停止位置自動制御装置を説明する説明図である。
【図3】本発明の停止位置自動制御装置におけるレバー操作部による走行停止レバーの操作例を示した説明図である。
【図4】本発明の一実施形態に係る単軌条運搬機の停止位置自動制御装置の動作を説明する説明図である。
【発明を実施するための形態】
【0012】
以下、図面を参照しながら本発明の実施形態を説明する。図1及び図2は、本発明の一実施形態に係る単軌条運搬機の停止位置自動制御装置を説明する説明図であり、図1は側面視の説明図、図2は平面視の説明図を示している。
【0013】
単軌条運搬機1は、従来公知のもので走行機体10と荷物台車20を備えており、搬送経路に敷設された軌条(レール)30の上を走行・移動するものである。軌条30は、所定の間隔で支柱31を設けるなどして地面の上に一列敷設されており、図示の例では軌条30の下部にラック30aが設けられている。
【0014】
走行機体10は、エンジン11とエンジン11の出力軸の回転を駆動輪に伝える動力伝達部12を備えている。駆動輪(図3参照の符号13)は、軌条30のラック30aに噛み合うピニオンを備えている。また、走行機体10は、走行停止レバー14を備えている。走行停止レバー14は、走行位置でエンジン11の定格回転を出力させて、動力伝達部12の遠心クラッチを接続状態にし、エンジン11の出力軸の回転を駆動輪13に伝えて走行機体10を走行させる。走行停止レバー14を回動操作して停止位置にすると、エンジン11の出力が低下して遠心クラッチが切断状態になり、走行機体10を停止させることができる。また、動力伝達部12は図示省略したレバー操作で前後進の切り替えが可能で有り、走行機体10はこの切り替え操作によって前進又は後進が可能になっている。荷物台車20は、連結部材21で走行機体10に連結しており、軌条30のラック30aに噛み合うピニオン輪22と荷台23を備えている。
【0015】
このような既存の単軌条運搬機1に装備される停止位置自動制御装置は、停止位置指示板40、停止位置検知センサ41、制御部42、レバー操作部43を備えている。停止位置指示板40は軌条30の側方における任意の停止位置に配備されるものであり、作業者が求める軌条30の中間停止位置に停止位置指示板40を配備する。この停止位置指示板40は、例えば、積み込み作業位置に集積したコンテナなどの側面に設置してもよいし、また、地面に容易に位置変更可能な支柱を立てて、その支柱に取り付けてもよい。
【0016】
停止位置検知センサ41は走行機体10又は荷物台車20に設けられ、走行機体10又は荷物台車20が停止位置指示板40に近接したことを検知できるものであればよい。例えば、停止位置指示板40を反射板にし、停止位置検知センサ41を反射板への投光及び反射光検出を行う光電センサにすることで、走行機体10又は荷物台車20が反射板に近接したことを光電センサで検知することができる。図示の例では、走行機体10の走行方向に沿って一対の停止位置検知センサ41A,41Bを備えている。これによると、制御部42は、一方の停止位置検知センサ41Aが停止位置指示板40を検知した場合には前進時であり、他方の停止位置検知センサ41Bが停止位置指示板40を検知した場合には後進時であることを認識することができる。
【0017】
制御部42は、走行機体10又は荷物台車20に設けられ、停止位置検知センサ41が出力する検知信号に基づいて停止動作信号を出力する。図示の例では荷物台車20に制御部42を配備しているが、これに限らず走行機体10や走行機体10と荷物台車20との中間位置に制御部42を配備してもよい。制御部42は、停止位置検知センサ41やレバー操作部43、制御部42自身を駆動するための電源を備えている。
【0018】
レバー操作部43は、制御部42の停止動作信号に基づいて走行停止レバー14を停止位置に操作するものであり、制御部42の停止動作信号によって回動するモータ43Aと、モータ43Aの回転で走行停止レバー14を停止位置に回動する操作板43Bと、モータ43Aを走行機体10に装着するブラケット43Cを備えている。
【0019】
図3は、レバー操作部43による走行停止レバーの操作例を示した説明図である。走行停止レバー14は、図示Aの操作位置が走行位置であり、図示Bの操作位置が前進時の停止位置、図示Cの操作位置が後進時の停止位置である。図示の例では、走行停止レバー14は手動操作レバー14mとストッパー接触レバー14nを一体に備えている。手動操作レバー14mは手動操作で前述した走行位置と停止位置を切り替え操作するものである。ストッパー接触レバー14nは、軌条30の両端に設けたストッパー受けに接触することで操作されるものである。レバー操作部43は、手動操作レバー14mとストッパー接触レバー14nを一体に回動させて走行位置と停止位置を切り替える。
【0020】
図示したレバー操作部43の構造を具体的に説明すると、モータ43Aの回転軸が走行停止レバー14の回動軸と一致するように、ブラケット43Cを介してモータ43Aを走行機体10に装着し、モータ43Aの回転軸に操作板43Bを装着する。操作板43Bは一対の突起部a,bを有しており、この突起部a,bがそれぞれ手動操作レバー14mとストッパー接触レバー14nに当接するようになっている。操作板43Bがモータ41Aによって回動することで、突起部a,bが手動操作レバー14mとストッパー接触レバー14nを押して走行操作レバー14が回動する。
【0021】
図示の例では、制御部42は走行機体10が前進時にはモータ43Aを右回転させる停止動作信号を出力し、水平な原点位置にある操作板43Bを右回転させて走行停止レバー14を図示Aの操作位置から図示Bの操作位置に回動する。また、走行機体10が後進時にはモータ43Aを左回転させる停止動作信号を出力して、水平な原点位置にある操作板43Bを左回転させて走行停止レバー14を図示Aの操作位置から図示Cの操作位置に回動する。
【0022】
そして、制御部42は、一回の停止動作信号を出力してモータ43Aによって操作板43Bを左右に回動させる毎に、操作板43Bを水平な原点位置に戻すようにモータ43Aを回転させる。これによって、走行停止レバー14の手動操作時や走行停止レバー14がストッパー受けで操作される際に操作板43Bが干渉するのを回避している。
【0023】
図4は、本発明の一実施形態に係る単軌条運搬機の停止位置自動制御装置の動作を説明する説明図である。支柱31で支持されて運搬経路に敷設された軌条30は、その始点位置と終点位置の近傍にストッパー受け32が設けられている。前述したストッパー接触レバー14nがストッパー受け32に接触することで、走行機体10と荷物台車20を備える単軌条運搬機1は軌条30の両端で停止することができる。
【0024】
一方、軌条30の側方には、作業者が選択する任意の中間位置に停止位置指示板40が配置されている。これによって、単軌条運搬機1は、前述した停止位置自動制御装置の機能によって、停止位置指示板40と近接する位置で自動停止することができる。停止位置指示板40の位置は軌条30に沿った任意の位置に変更することができるので、軌条30の中間位置における任意の位置で単軌条運搬機1を自動停止させることが可能になる。所望の停止位置で単軌条運搬機1を停止させた後は、必要な作業を行った後、作業者が走行停止レバー14を走行位置に戻す手動操作を行うことで単軌条運搬機1の再走行が可能になる。
【0025】
このような停止位置自動制御装置を設けることで、非乗用の単軌条運搬機1を軌条30の任意の位置で安全に自動停止させることができる。また、この停止位置自動制御装置は、単軌条運搬機1が備える既存の走行停止レバー14の機能をそのまま生かしており、操作板43Bは停止操作を行った後は走行停止レバー14に干渉しない水平な原点位置に戻る機構になっているので、走行停止レバー14の手動操作による走行開始操作や、ストッパー受け32による走行機体10の停止操作を併せて行うことができる。
【0026】
また、制御部42には各種のシーケンス制御を組み込むことが可能である。一例を挙げると、停止位置指示板40を複数設置し、停止位置指示板40の通過数を指定することにより、所定の位置に単軌条運搬機1を自動停止させることなどが可能である。
【符号の説明】
【0027】
1:単軌条運搬機,
10:走行機体,11:エンジン,12:動力伝達部,13:駆動輪,
14:走行停止レバー,
20:荷物台車,
30:軌条,31:支柱,32:ストッパー受け,
40:停止位置指示板(反射板),
41(41A,41B):停止位置検知センサ(光電センサ),
42:制御部,
43:レバー操作部,
43A:モータ,43B:操作板,43C:ブラケット,
【特許請求の範囲】
【請求項1】
運搬経路に敷設された軌条の上を走行する走行機体と該走行機体に連結されて前記軌条の上を移動する荷物台車を備え、前記走行機体が備える走行停止レバーの操作によって前記走行機体を走行又は停止させる単軌条運搬機の停止位置自動制御装置であって、
前記軌条の側方における任意の停止位置に配備される停止位置指示板と、
前記走行機体又は前記荷物台車に設けられ、前記走行機体又は前記荷物台車が前記停止位置指示板に近接したことを検知して検知信号を出力する停止位置検知センサと、
前記走行機体又は前記荷物台車に設けられ、前記検知信号に基づいて停止動作信号を出力する制御部と、
前記停止動作信号に基づいて前記走行停止レバーを停止位置に操作するレバー操作部とを備えることを特徴とする単軌条運搬機の停止位置自動制御装置。
【請求項2】
前記停止位置指示板は反射板であり、
前記停止位置検知センサは、前記反射板への投光及び反射光検出を行う光電センサであることを特徴とする請求項1記載に記載された単軌条運搬機の停止位置自動制御装置。
【請求項3】
前記レバー操作部は、前記停止動作信号によって回動するモータと、該モータの回転で前記走行停止レバーを停止位置に回動する操作板とを備えることを特徴とする請求項1又は2に記載された単軌条運搬機の停止位置自動制御装置。
【請求項4】
前記制御部は、前記停止動作信号によって前記操作板を回動させた後に、当該操作板を前記走行停止レバーに干渉しない原点位置に戻すように前記モータを回転させることを特徴とする請求項3に記載された単軌条運搬機の停止位置自動制御装置。
【請求項1】
運搬経路に敷設された軌条の上を走行する走行機体と該走行機体に連結されて前記軌条の上を移動する荷物台車を備え、前記走行機体が備える走行停止レバーの操作によって前記走行機体を走行又は停止させる単軌条運搬機の停止位置自動制御装置であって、
前記軌条の側方における任意の停止位置に配備される停止位置指示板と、
前記走行機体又は前記荷物台車に設けられ、前記走行機体又は前記荷物台車が前記停止位置指示板に近接したことを検知して検知信号を出力する停止位置検知センサと、
前記走行機体又は前記荷物台車に設けられ、前記検知信号に基づいて停止動作信号を出力する制御部と、
前記停止動作信号に基づいて前記走行停止レバーを停止位置に操作するレバー操作部とを備えることを特徴とする単軌条運搬機の停止位置自動制御装置。
【請求項2】
前記停止位置指示板は反射板であり、
前記停止位置検知センサは、前記反射板への投光及び反射光検出を行う光電センサであることを特徴とする請求項1記載に記載された単軌条運搬機の停止位置自動制御装置。
【請求項3】
前記レバー操作部は、前記停止動作信号によって回動するモータと、該モータの回転で前記走行停止レバーを停止位置に回動する操作板とを備えることを特徴とする請求項1又は2に記載された単軌条運搬機の停止位置自動制御装置。
【請求項4】
前記制御部は、前記停止動作信号によって前記操作板を回動させた後に、当該操作板を前記走行停止レバーに干渉しない原点位置に戻すように前記モータを回転させることを特徴とする請求項3に記載された単軌条運搬機の停止位置自動制御装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−86664(P2013−86664A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−229270(P2011−229270)
【出願日】平成23年10月18日(2011.10.18)
【出願人】(501203344)独立行政法人農業・食品産業技術総合研究機構 (827)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月18日(2011.10.18)
【出願人】(501203344)独立行政法人農業・食品産業技術総合研究機構 (827)
[ Back to top ]