
噛合伝達誤差測定装置
【課題】トルク変動や回転変動の影響を受けることなく噛合伝達誤差を高い精度で測定することができ、しかも連続的に測定が可能な噛合伝達誤差測定装置を提供する。
【解決手段】
第1試験歯車16にはトルク付与装置46によって負荷トルクを付与し、第2試験歯車18にはトルク付与装置48によって負荷トルクを付与し、非作動状態において、第1試験歯車16および第2試験歯車18が互いに静的に釣り合うように調整することで、それぞれの試験歯車に生じる負荷トルクは、トルク付与装置によるものだけとなる。また、トルク付与装置の構造上、連続的に測定が可能であり、しかもトルク変動はほとんど生じないため、高い精度で連続測定が可能となる。
【解決手段】
第1試験歯車16にはトルク付与装置46によって負荷トルクを付与し、第2試験歯車18にはトルク付与装置48によって負荷トルクを付与し、非作動状態において、第1試験歯車16および第2試験歯車18が互いに静的に釣り合うように調整することで、それぞれの試験歯車に生じる負荷トルクは、トルク付与装置によるものだけとなる。また、トルク付与装置の構造上、連続的に測定が可能であり、しかもトルク変動はほとんど生じないため、高い精度で連続測定が可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歯車伝達機構の噛合伝達誤差測定装置にかかり、特に、噛合伝達誤差を高い精度で連続的に測定できる装置に関するものである。
【背景技術】
【0002】
互いに噛み合って回転する一対の歯車は、歯面の形状誤差や歯のたわみなどによって噛合伝達誤差を生じ、動力伝達性能に影響を与えたり振動が発生したりする。かかる噛合伝達誤差を検出するために、互いに噛み合う一対の第1歯車および第2歯車に所定の噛合荷重を付与した状態で回転させ、それら第1歯車および第2歯車の回転角をそれぞれロータリエンコーダによって測定することにより、その回転角のずれを検出する歯車伝達機構の噛合伝達誤差測定装置が提案されている。
【0003】
たとえば、特許文献1に開示されている噛合伝達誤差測定装置においては、互いに噛み合う駆動歯車および従動歯車において、駆動歯車に連結された入力側モータによって速度制御した回転を与え、従動歯車側に連結された出力側モータによってトルク制御した負荷トルクを与えながらロータリエンコーダでそれぞれの回転角を検出し相互の位相差を演算することで噛合伝達誤差を測定し、さらに、入力側モータは、流体継手を介してロータリエンコーダに連結されると共に、出力側モータは、慣性体を介してロータリエンコーダに連結されている。ここで、たとえば出力側モータはトルク制御のため、その回転変動は制御できない。そのため、モータの回転変動が及ぼす影響を除去して回転の微少変動が測定できるように、上述のように出力側モータは慣性体を介して連結されている。
【0004】
【特許文献1】特許第3135383号公報
【特許文献2】特許第3085057号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1の噛合伝達誤差測定装置では、出力側モータとロータリエンコーダとの間に慣性体を介して連結されることで、負荷トルクを与える出力側モータが起こす回転変動の測定値への影響を排除することができるが、一方では、歯車の噛合伝達誤差による回転の微少変動と比べて十分大きい、モータによる回転変動のノイズを測定から除去するための慣性体が、本来測定すべき歯車による微少な回転変動まで除去してしまう恐れがあった。
【0006】
この問題に対して、特許文献2に開示されている噛合伝達誤差測定装置においては、互いに噛み合う駆動歯車および従動歯車において、それぞれの歯車の回転軸に負荷錘を吊り下げることによって、それぞれの歯車には常に一定の負荷トルクをかけることができ、高い精度で回転誤差を検出することを可能にしている。しかし、特許文献2の噛合伝達誤差測定装置では、回転軸の回転に伴って負荷錘が上昇あるいは降下するが、その上昇あるいは降下の移動量に制限があるため、連続的に測定できない問題があった。
【0007】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、トルク変動や回転変動の影響を受けることなく噛合伝達誤差を高い精度で測定することができ、しかも連続的に測定が可能な噛合伝達誤差測定装置を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するための、請求項1にかかる発明の要旨とするところは、(a)互いに噛み合う一対の被測定歯車に一定の負荷トルクを与えつつそれら一対の被測定歯車を回転させる過程でその被測定歯車の噛合伝達誤差を測定する噛合伝達誤差測定方法において、(b)前記被測定歯車とともに第1軸心まわりに回転する第1定滑車と、回転制御モータによりその第1軸心に平行な第2軸心まわりに回転駆動される第2定滑車とを設け、(c)それら第1定滑車および第2定滑車に可撓性無端環状の動力伝達線材を巻き架け、(d)前記第1定滑車および第2定滑車の間に巻き架けられることによりそれらの間に2本架け渡された状態の前記動力伝達線材のうちの一方に所定の負荷錘を有する動滑車を架け、(e)前記第1定滑車および第2定滑車の間に2本架け渡された動力伝達線材のうちの他方に常時弛みが形成されるように前記回転制御モータを駆動することにより、前記一定の負荷トルクを付与することを特徴とする。
【0009】
また、請求項2にかかる発明の要旨とするところは、(a)互いに噛み合う一対の被測定歯車に一対のトルク付与装置から一定の負荷トルクをそれぞれ与えつつそれら一対の被測定歯車を回転させる過程でその被測定歯車の噛合伝達誤差を測定する噛合伝達誤差測定装置において、(b)前記トルク付与装置は、(c)前記被測定歯車とともに第1軸心まわりに回転する第1定滑車と、(d)回転制御モータによりその第1軸心に平行な第2軸心まわりに回転駆動される第2定滑車と、(e)前記第1定滑車および第2定滑車に巻き架けられた可撓性無端環状の動力伝達線材と、(f)前記第1定滑車および第2定滑車の間に巻き架けられることによりそれらの間に2本架け渡された状態の前記動力伝達線材のうちの一方に架けられた所定の負荷錘を有する動滑車と、(g)前記一定の負荷トルクを付与するために、前記第1定滑車および第2定滑車の間に2本架け渡された動力伝達線材のうちの他方に常時弛みが形成されるように前記回転制御モータを駆動する回転駆動制御装置とを、含み、(h)前記一対の負荷錘を適宜調整することで、非作動状態において前記一対の被測定歯車は静的に釣り合わされていることを特徴とする。
【0010】
また、請求項3にかかる発明の要旨とするところは、(a)入力軸および差動装置によって出力される一対の出力軸を備えた変速機のそれぞれの回転軸にそれぞれ設けられたトルク付与装置から一定の負荷トルクを与えつつ、それら入力軸および一対の出力軸を回転させる過程でその変速機の噛合伝達誤差を測定する噛合伝達誤差測定装置において、(b)前記トルク付与装置は、(c)前記それぞれの回転軸とともにその軸心まわりに回転する第1定滑車と、(d)回転制御モータによりその回転軸に平行な第2軸心まわりに回転駆動される第2定滑車と、(e)前記第1定滑車および第2定滑車に巻き架けられた可撓性無端環状の動力伝達線材と、(f)前記第1定滑車および第2定滑車の間に巻き架けられることによりそれらの間に2本架け渡された状態の前記動力伝達線材のうちの一方に架けられた所定の負荷錘を有する動滑車と、(g)前記一定の負荷トルクを付与するために、前記第1定滑車および第2定滑車の間に2本架け渡された動力伝達線材のうちの他方に常時弛みが形成されるように前記回転制御モータを駆動する回転駆動制御装置とを、含み、(h)前記それぞれの回転軸に設けられた負荷錘の錘を適宜調整することで、非作動状態において前記変速機は静的に釣り合わされていることを特徴とする。
【0011】
また、請求項4にかかる発明の要旨とするところは、請求項2または3に記載の噛合伝達誤差測定装置において、前記回転制御モータには、減速装置が接続されていることを特徴とする。
【発明の効果】
【0012】
請求項1にかかる発明の噛合伝達誤差測定方法によれば、第1定滑車および第2定滑車に巻き架けられている2本の可撓性無端環状の動力伝達線材の一方に所定の負荷錘を有する動滑車を架け、他方の動力伝達線材のうちの他方に常時弛みが形成されるように回転制御モータを駆動させることによって、たとえば、モータ等の回転付与装置によって、第1定滑車を回転させると同時に回転制御モータによって第2定滑車が同様に回転し、他方の動力伝達線材には常時弛みが形成され連続回転が可能になる。また、被測定歯車には動滑車および負荷錘によって常時所定の負荷トルクがかけられ、しかも他方の動力伝達線材には弛みを常時持たせることで、他方の動力伝達線材による負荷トルクの変動を阻止することができ、トルク変動等の影響がほとんど生じない状態で連続測定が可能となる。
【0013】
また、請求項2にかかる発明の噛合伝達誤差測定装置によれば、一対のトルク付与装置は、それぞれ第1定滑車および第2定滑車に巻き架けられている2本の可撓性無端環状の動力伝達線材の一方に所定の負荷錘を有する動滑車を架け、他方の動力伝達線材のうちの他方に常時弛みが形成されるように回転制御モータを駆動させることによって、たとえば、モータ等の回転付与装置によって、第1定滑車を回転させると同時に回転制御モータによって第2定滑車が同様に回転し、他方の動力伝達線材には常時弛みが形成され連続回転が可能になる。また、被測定歯車には動滑車および負荷錘によって常時所定の負荷トルクがかけられ、しかも他方の動力伝達線材には弛みを常時持たせることで、他方の動力伝達線材による負荷トルクの変動が阻止されている。また、一対の被測定歯車は一対のトルク付与装置の負荷錘を適宜調整することによって静的に釣り合わされている。こうすることで、たとえばモータ等の回転付与装置によって、一対の被測定歯車を回転させると、一対のトルク付与装置によって、一対の被測定歯車には常時トルク付与装置のみによる負荷トルクが付与され、しかも連続的に測定が可能となる。
【0014】
また、請求項3にかかる発明の噛合伝達誤差測定装置によれば、それぞれの回転軸に設けられたトルク付与装置はそれぞれ、第1定滑車および第2定滑車に巻き架けられている2本の可撓性無端環状の動力伝達線材の一方に所定の負荷錘を有する動滑車を架け、他方の動力伝達線材のうちの他方に常時弛みが形成されるように回転制御モータを駆動させることによって、たとえば、モータ等の回転付与装置によって、第1定滑車を回転させると同時に回転制御モータによって第2定滑車が同様に回転し、他方の動力伝達線材には常時弛みが形成され連続回転が可能になる。また、被測定歯車には動滑車および負荷錘によって常時所定の負荷トルクがかけられ、しかも他方の動力伝達線材には弛みを常時持たせることで、他方の動力伝達線材による負荷トルクの変動が阻止されている。また、変速機は、それぞれの回転軸に設けられているトルク付与装置の負荷錘を適宜調整することによって、釣り合わされている。こうすることで、たとえばモータ等の回転付与装置によって、変速機を回転させると、それぞれのトルク付与装置によって、それぞれの回転軸には常時トルク付与装置のみによる負荷トルクが付与され、しかも連続的に測定が可能となる。
【0015】
また、請求項4にかかる発明の噛合伝達誤差測定装置によれば、回転制御モータに減速装置が接続されることで、回転制御モータの出力を補うことができ、また、回転制御モータを小さくすることができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
【0017】
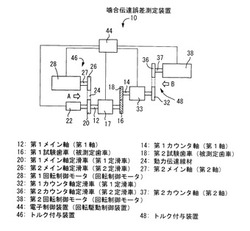
図1は本発明が適用された歯車の噛合伝達誤差測定装置10の簡略図である。噛合伝達誤差測定装置10は、図示しない軸受により回転可能に支持された第1メイン軸12および第1メイン軸12に平行に配置され図示しない軸受により回転可能に支持された第1カウンタ軸14を備えている。第1メイン軸12には、第1試験歯車16が相対回転不能に取り付けられ、一方、第1カウンタ軸14には第1試験歯車16と噛み合う状態で第2試験歯車18が相対回転不能に取り付けられている。第1メイン軸12と第1カウンタ軸14との軸間距離は、一対の第1試験歯車16および第2試験歯車18の中心距離に設定されており、第1試験歯車16および第2試験歯車18は、それぞれ第1メイン軸12および第1カウンタ軸14に着脱可能に取り付けられるようになっている。第1メイン軸12には、第1試験歯車16とともに第1メイン軸12まわりを回転する第1メイン軸定滑車20が相対回転不能に設けられており、第1メイン軸12の第1試験歯車16の反対側端部には、駆動モータ22が連結されており、第1メイン軸定滑車20と第1試験歯車16との間には、回転角を検出するためのロータリエンコーダ17が組み込まれている。また、紐やワイヤー等から成る動力伝達線材24が架け渡されることによって第1メイン軸定滑車20と作動的に連結される第2メイン軸定滑車26が配置され、第1メイン軸12に平行な第2メイン軸27を介して、第1回転制御モータ28が連結されている。ここで、駆動モータ22および第1回転制御モータ28には、たとえば同期モータ等の制御可能なモータが使用される。なお、本実施例の第1試験歯車16および第2試験歯車18が本発明の互いに噛み合う一対の被測定歯車に対応しており、第1メイン軸定滑車20および第2メイン軸定滑車26が本発明の第1定滑車および第2定滑車に対応しており、第1メイン軸12および第2メイン軸27が本発明の第1軸および第2軸に対応しており、第1回転制御モータ28が本発明の回転制御モータに対応している。
【0018】
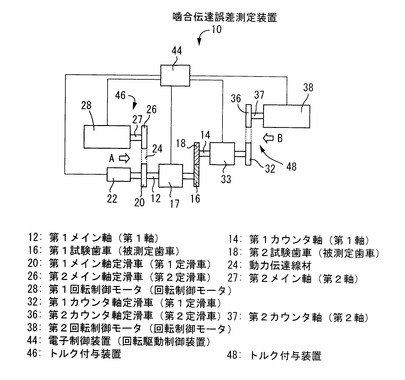
図2は、第1メイン軸定滑車20および第2メイン軸定滑車26を矢印A方向から見た矢視図である。ここで、第1メイン軸定滑車20は駆動モータ22に連結されており、第2メイン軸定滑車26は第1回転制御モータ28に連結され、互いの定滑車の径寸法は等しくされている。第1メイン軸定滑車20および第2メイン軸定滑車26には可撓性無端環状の動力伝達線材24が巻き架けられており、その動力伝達線材24によって作動的に連結されている。ここで、第1メイン軸定滑車20と第2メイン軸定滑車26との間に巻き架けられることで架け渡された2本の動力伝達線材24のうち、実線で示される側の動力伝達線材24には、第1負荷錘30を有する第1動滑車29が架けられている。一方、第1メイン軸定滑車20と第2メイン軸定滑車26との間に巻き架けられることで架け渡された2本の動力伝達線材24のうち、破線で示される側の動力伝達線材24には常時弛みが形成されている。なお、本実施例の第1動滑車29が本発明の動滑車に対応しており、第1負荷錘30が本発明の負荷錘に対応している。
【0019】
図1に戻り、第1カウンタ軸14の第2試験歯車18の反対側端部には、第2試験歯車18とともに第1カウンタ軸14まわりを回転する第1カウンタ軸定滑車32が相対回転不能に設けられており、第2試験歯車18と第1カウンタ軸定滑車32との間にはロータリエンコーダ33が組み込まれている。また、動力伝達線材24によって第1カウンタ軸定滑車32と作動的に連結する第2カウンタ軸定滑車36が配置され、第1カウンタ軸14に平行な第2カウンタ軸37を介して、第2回転制御モータ38が連結されている。ここで、第2回転制御モータ38には、たとえば同期モータ等の制御可能なモータが使用される。なお、本実施例の第1カウンタ軸定滑車32および第2カウンタ軸定滑車36が本発明の第1定滑車および第2定滑車に対応しており、第1カウンタ軸14および第2カウンタ軸37が本発明の第1軸および第2軸に対応しており、第2回転制御モータ38が本発明の回転制御モータに対応している。
【0020】
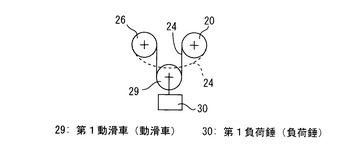
図3は、第1カウンタ軸定滑車32および第2カウンタ軸定滑車36を矢印B方向から見た矢視図である。ここで、第1カウンタ軸定滑車32は、第1カウンタ軸14に連結されており、第2カウンタ軸定滑車36は、第2回転制御モータ38に連結されており、互いの定滑車の径寸法は等しくされている。第1カウンタ軸定滑車32および第2カウンタ軸定滑車36には動力伝達線材24が巻き架けられており、その動力伝達線材24によって作動的に連結されている。ここで、第1カウンタ軸定滑車32と第2カウンタ軸定滑車36との間に巻き架けられることで架け渡された2本の動力伝達線材24のうち、実線で示される側の動力伝達線材24には、第2負荷錘42を有する第2動滑車40が架けられている。一方、第1カウンタ軸定滑車32と第2カウンタ軸定滑車36との間に巻き架けられることで架け渡された2本の動力伝達線材24のうち、破線で示される側の動力伝達線材24には、常時弛みが形成されている。なお、本実施例の第2動滑車40が、本発明の動滑車に対応しており、第2負荷錘42が本発明の負荷錘に対応している。
【0021】
また、第1回転制御モータ28、第2回転制御モータ38、および駆動モータ22が非作動の状態において、噛合伝達誤差測定装置10が静的に釣り合うように第1負荷錘30および第2負荷錘42の質量がそれぞれ調整される。つまり、互いに噛み合うことで作用し合う第1試験歯車16および第2試験歯車18の反力が等しくなるように第1負荷錘30および第2負荷錘42の質量が調整される。たとえば、第1メイン軸定滑車20と第1カウンタ軸定滑車32との径寸法が等しく且つ第1動滑車29および第2動滑車40の質量が等しい場合では、第1負荷錘30と第2負荷錘42との比が、第1試験歯車16のピッチ半径と第2試験歯車18のピッチ半径との比と等しくなるように設定される。なお、第1メイン軸定滑車20の径寸法と第1カウンタ軸定滑車32の径寸法との比が第1試験歯車16のピッチ半径と第2試験歯車18のピッチ半径との比と等しくすると第1負荷錘30および第2負荷錘42の質量を等しくすることもできる。
【0022】
また、噛合伝達誤差測定装置10は、電子制御装置44によって制御される。たとえば駆動モータ22によって噛合伝達誤差測定装置10を作動させると、駆動モータ22の回転数をロータリエンコーダ17によって検出し、第1回転制御モータ28が、電子制御装置44によって、ロータリエンコーダ17によって得られた回転数と同じ回転数となるように同期させられる。すなわち、駆動モータ22の回転数と第1制御モータ28の回転数が等しくなるように同期させられる。ここで図2に示すように、第1メイン軸定滑車20と第2メイン軸定滑車26の径寸法は等しく互いに同じ回転数で回転させられるため、第1メイン軸定滑車20が動力伝達線材24を移動させる速度と第2メイン軸定滑車26が動力伝達線材24を移動させる速度が等しくなり、第1動滑車29の位置および動力伝達線材24の弛みの形状が変化することなく連続的に回転させることが可能となる。さらに、長時間測定する場合では、動力伝達線材24は微少な回転数のずれによって弛みがなくなり、第1動滑車29の位置が上下する恐れがあるが、第1動滑車29に設けられている図示しない位置検出センサーによって、第1動滑車29の位置が逐次検出され、電子制御装置44に入力される。この情報をもとに、電子制御装置44が駆動モータ22および第1回転制御モータ28を好適に制御することで第1動滑車29の位置は常時一定に保たれるとともに、動力伝達線材24には常時弛みが形成される。なお、これら第1メイン軸定滑車20、第2メイン軸定滑車26、動力伝達線材24、第1動滑車29、第1負荷錘30、および電子制御装置44によって、トルク付与装置46が構成される。また、本実施例の電子制御装置44が本発明の回転駆動制御装置に対応している。
【0023】
同様に、駆動モータ22の作動により、第1試験歯車16および第2試験歯車18が回転することで第1カウンタ軸14が回転させられるが、その回転数をロータリエンコーダ33によって検出し、第2回転制御モータ38が、電子制御装置44によって、ロータリエンコーダ33によって得られた回転数と同じ回転数となるように同期させられる。すなわち、第1カウンタ軸14の回転数と第2回転制御モータ38の回転数が等しくなるように同期させられる。ここで図3に示すように、第1カウンタ軸定滑車32と第2カウンタ軸定滑車36の径寸法は等しく互いに同じ回転数で回転させられるため、第1カウンタ軸定滑車32が動力伝達線材24を移動させる速度と第2カウンタ軸定滑車36が動力伝達線材24を移動させる速度とが等しくなり、第2動滑車40の位置および動力伝達線材24の弛みの形状が変化することなく連続的に回転させることが可能となる。さらに、長時間測定する場合では、動力伝達線材24は微少な回転するのずれによって弛みがなくなり、第2動滑車40の位置が上下する恐れがあるが、第2動滑車40に設けられている図示しない位置検出センサーによって、第2動滑車40の位置が逐次検出され、電子制御装置44に入力される。この情報をもとに、電子制御装置44が第2回転制御モータ38を好適に制御することで第2動滑車40の位置は常時一定に保たれるとともに、動力伝達線材24には常時弛みが形成される。なお、これら第1カウンタ軸定滑車32、第2カウンタ軸定滑車36、動力伝達線材24、第2動滑車40、第2負荷錘42、および電子制御装置44によって、トルク付与装置48が構成される。
【0024】
このように構成される噛合伝達誤差測定装置10において、駆動モータ22によって低速回転で装置を作動させると、第1試験歯車16および第2試験歯車18は噛み合った状態で釣り合わされているので、駆動モータ22には反力が生じず、第1試験歯車16および第2試験歯車18にかかる負荷トルクはそれぞれの回転軸に設けられたトルク付与装置46および48によってかけられる負荷トルクのみとなる。具体的には、第1動滑車29および第1負荷錘30の荷重を加えた荷重の半分の荷重と第1メイン軸定滑車20の半径寸法の積が負荷トルクとして第1試験歯車16にかけられる。同様に、第2動滑車40および第2負荷錘42の荷重を加えた荷重の半分の荷重と第1カウンタ軸定滑車32の半径寸法の積が負荷トルクとして第2試験歯車18にかけられる。これより、駆動モータ22で装置を駆動させながらエンコーダ17および33によってそれぞれの回転角を測定することにより、その回転角の位相のずれから噛合伝達誤差を検出できる。
【0025】
上述のように、本実施例によれば、第1試験歯車16にはトルク付与装置46によって負荷トルクを付与し、第2試験歯車18にはトルク付与装置48によっ負荷トルクを付与し、非作動状態において第1試験歯車16および第2試験歯車18が互いに静的に釣り合うように調整することで、それぞれの試験歯車に生じる負荷トルクは、トルク付与装置46および48によるもののみとなる。また、トルク付与装置46および48の構造上、連続的に測定が可能であり、しかもトルク変動はほとんど生じないため、高い精度で測定が可能となる。
【0026】
つぎに、本発明の他の実施例を説明する。なお、以下の説明において前述の実施例と共通する部分には同一の符号を付して説明を省略する。
【0027】
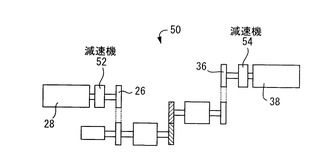
図4は、本発明の他の実施例である噛合伝達誤差測定装置50の簡略図である。なお、本実施例においても噛合伝達誤差測定装置50は図示しない電子制御装置によって前述の実施例と同様に制御されている。図4に示されるように、噛合伝達誤差測定装置50は、前述の噛合伝達誤差測定装置10に減速機を設けたものである。具体的には、第1回転制御モータ28と第2メイン軸定滑車26との間に減速機52が介装されることによって第1回転制御モータ28の回転が減速される。一方、第2カウンタ軸定滑車36と第2回転制御モータ38との間に減速機54が介装されることによって第2回転制御モータ38の回転が減速される。また、噛合伝達誤差測定装置50の他の構成および作動については、前述の噛合伝達誤差測定装置10と同様であるため、同様の効果を得ることができる。なお、第1回転制御モータ28および第2回転制御モータ38の回転数は減速機52および54の減速比を考慮して決定される。
【0028】
このように、前述の実施例によれば、噛合伝達誤差測定装置50は、前述の噛合伝達誤差測定装置10と同様に高い精度で且つ連続的に測定することが可能であり、しかも減速機52および減速機54によって、第1回転制御モータ28および第2回転制御モータ38の回転力が補助される。これより第1回転制御モータ28および第2回転制御モータ38のトルク不足を補うことができ、第1回転制御モータ28および第2回転制御モータ38をコンパクトにすることもできる。
【0029】
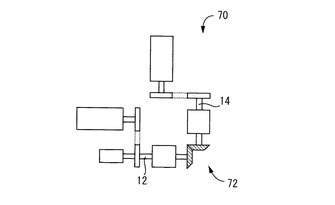
つぎに、本発明のさらに他の実施例を説明する。図5は、本発明のさらに他の実施例である噛合伝達誤差測定装置70の簡略図である。なお、本実施例においても噛合伝達誤差測定装置70は図示しない電子制御装置によって前述の実施例と同様に制御されている。図5に示されるように、噛合伝達誤差測定装置70の試験歯車は、互いに噛み合う一対の傘歯車72となっており、第1メイン軸12および第1カウンタ軸14は互いに直交している。ここで、噛合伝達誤差測定装置70の他の構成および作動については、前述の噛合伝達誤差測定装置10と同様であるため、同様の効果を得ることができる。
【0030】
このように、前述の実施例によれば、噛合伝達誤差測定装置70は、前述の噛合伝達誤差測定装置10と同様に高い精度で且つ連続的に測定することが可能であり、しかも、傘歯車やハイポイドギヤ等の回転軸心が垂直に変化するような態様の歯車でも測定が可能となる。
【0031】
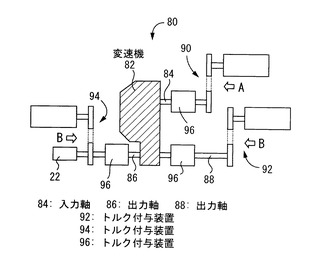
つぎに、本発明のさらに他の実施例を説明する。図6は、本発明のさらに他の実施例である変速機82の噛合伝達誤差測定装置80の簡略図である。なお、本実施例においても噛合伝達誤差測定装置80は、図示しない電子制御装置によって前述の実施例と同様に制御されている。図6に示されるように、変速機82は、前輪駆動方式の変速機82となっており、入力軸84と、変速機82内の図示しない差動装置によって出力軸86および88の一対の出力軸と、を備えている。これにより、噛合伝達誤差測定装置80は、入力軸84に設けられたトルク付与装置90並びに出力軸86および88に設けられたトルク付与装置92および94の3つのトルク付与装置が設けられ、各軸にロータリエンコーダ96が組み込まれている。
【0032】
また、トルク付与装置80は、図2と同様の構造となっており、トルク付与装置92および94は図3と同様の構造となっており、出力軸86の軸端には、駆動モータ22が連結されている。ここで、トルク付与装置90、92および94の各負荷錘の質量は、変速機82の変速比を考慮して噛合伝達誤差測定装置80の非作動時において静的に釣り合いが保てるように調整される。また、噛合伝達誤差測定装置80の他の構成および作動については、前述の噛合伝達誤差測定装置10と同様であるため、同様の効果を得ることができる。
【0033】
このように、前述の実施例によれば、噛合伝達誤差測定装置80は、前述の噛合伝達誤差測定装置10と同様に高い精度で且つ連続的に測定することが可能であり、しかも、変速機82のように測定軸が増加しても、トルク付与装置を増やし、前述の実施例と同様に各負荷錘を調整すれば、容易に測定することが可能となる。
【0034】
以上、本発明の実施例を図面に基づいて詳細に説明したが、本発明はその他の態様においても適用される。
【0035】
たとえば、噛合伝達誤差測定装置10の駆動モータ22の位置は、第1メイン軸12に設けられているが、第1カウンタ軸14側に設けて実施することもできる。すなわち、駆動モータ22自体はトルク付与に関与するモータではなく、装置を回転させるためのものであるため、装置に矛盾の生じない範囲で自由に駆動モータ22を設けて実施することができる。なお、他の実施例においても同様に駆動モータ22の位置を変更して実施することができる。また、本実施例では、駆動源として駆動モータ22を設けているが、特にモータである必要はなく、手動など他の駆動源を用いて実施することもできる。
【0036】
また、前述の実施例では、第1メイン軸定滑車20および第2メイン軸定滑車の径寸法が等しくされているが、それぞれの径寸法が異なっても実施は可能である。同様に、第1カウンタ軸定滑車32および第2カウンタ軸定滑車36の径寸法が異なっていても実施は可能である。
【0037】
また、前述の実施例では、動力伝達線材24は紐、ワイヤー等で構成されているが、ケーブル、ロープ、Vベルト、丸ベルト、平ベルト等で実施することもできる。また、滑りを抑制するために、定滑車をスプロケットで構成し、動力伝達線材24をチェーンに変えて実施することもできる。
【0038】
また、前述の実施例では、各第1定滑車と被測定歯車とは同心軸上に配設されているが、特に同心軸上に配設する必要はなく、ベルトやチェーン等を介して作動的に連結されるように配設することもできる。すなわち、定トルクを付与可能に作動的に連結されていれば問題はない。
【0039】
また、前述の実施例では、噛合伝達誤差測定装置50には減速機52および54が設けられているが、減速機は回転制御モータと一体型になっているものであっても構わない。
【0040】
また、前述の実施例では、噛合伝達誤差測定装置70では、傘歯車が測定されるが、本発明の噛合伝達誤差測定装置は、ねじ歯車など他の態様の歯車においても、適用することができる。
【0041】
また、前述の実施例では、変速機82は、前輪駆動方式の変速機82となっているが、後輪駆動方式等の他の形式の変速機であっても本発明は適用することができる。
【0042】
また、前述の実施例では、動滑車29および40の位置を制御することで噛合伝達誤差測定装置10の連続測定を可能としているが、動力伝達線材24の弛みの位置を制御することで連続測定を可能にすることもできる。
【0043】
なお、上述したのはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【図面の簡単な説明】
【0044】
【図1】本発明が適用された噛合伝達誤差測定装置の簡略図である。
【図2】トルク付与装置を矢印A方向から見た矢視図である。
【図3】トルク付与装置を矢印B方向から見た矢視図である。
【図4】本発明が適用された噛合伝達誤差測定装置の他の簡略図である。
【図5】本発明が適用された噛合伝達誤差測定装置の更に他の簡略図である。
【図6】本発明が適用された噛合伝達誤差測定装置の更に他の簡略図である。
【符号の説明】
【0045】
10、50、70、80:噛合伝達誤差測定装置 12:第1メイン軸(第1軸) 14:第1カウンタ軸(第1軸) 16:第1試験歯車(被測定歯車) 18:第2試験歯車(被測定歯車) 20:第1メイン定滑車(第1定滑車)24:動力伝達線材 26:第2メイン軸定滑車(第2定滑車) 27:第2メイン軸(第2軸) 28:第1回転制御モータ(回転制御モータ) 29:第1動滑車(動滑車) 30:第1負荷錘(負荷錘) 32:第1カウンタ軸定滑車(第1定滑車) 36:第2カウンタ軸定滑車 37:第2カウンタ軸(第2軸) 38:第2回転制御モータ(回転制御モータ) 40:第2動滑車(動滑車) 42:第2負荷錘(負荷錘) 44:電子制御装置(回転駆動制御装置) 46、48トルク付与装置 52、54:減速機 82:変速機 84:入力軸 86、88:出力軸 90、92、94:トルク付与装置
【技術分野】
【0001】
本発明は、歯車伝達機構の噛合伝達誤差測定装置にかかり、特に、噛合伝達誤差を高い精度で連続的に測定できる装置に関するものである。
【背景技術】
【0002】
互いに噛み合って回転する一対の歯車は、歯面の形状誤差や歯のたわみなどによって噛合伝達誤差を生じ、動力伝達性能に影響を与えたり振動が発生したりする。かかる噛合伝達誤差を検出するために、互いに噛み合う一対の第1歯車および第2歯車に所定の噛合荷重を付与した状態で回転させ、それら第1歯車および第2歯車の回転角をそれぞれロータリエンコーダによって測定することにより、その回転角のずれを検出する歯車伝達機構の噛合伝達誤差測定装置が提案されている。
【0003】
たとえば、特許文献1に開示されている噛合伝達誤差測定装置においては、互いに噛み合う駆動歯車および従動歯車において、駆動歯車に連結された入力側モータによって速度制御した回転を与え、従動歯車側に連結された出力側モータによってトルク制御した負荷トルクを与えながらロータリエンコーダでそれぞれの回転角を検出し相互の位相差を演算することで噛合伝達誤差を測定し、さらに、入力側モータは、流体継手を介してロータリエンコーダに連結されると共に、出力側モータは、慣性体を介してロータリエンコーダに連結されている。ここで、たとえば出力側モータはトルク制御のため、その回転変動は制御できない。そのため、モータの回転変動が及ぼす影響を除去して回転の微少変動が測定できるように、上述のように出力側モータは慣性体を介して連結されている。
【0004】
【特許文献1】特許第3135383号公報
【特許文献2】特許第3085057号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1の噛合伝達誤差測定装置では、出力側モータとロータリエンコーダとの間に慣性体を介して連結されることで、負荷トルクを与える出力側モータが起こす回転変動の測定値への影響を排除することができるが、一方では、歯車の噛合伝達誤差による回転の微少変動と比べて十分大きい、モータによる回転変動のノイズを測定から除去するための慣性体が、本来測定すべき歯車による微少な回転変動まで除去してしまう恐れがあった。
【0006】
この問題に対して、特許文献2に開示されている噛合伝達誤差測定装置においては、互いに噛み合う駆動歯車および従動歯車において、それぞれの歯車の回転軸に負荷錘を吊り下げることによって、それぞれの歯車には常に一定の負荷トルクをかけることができ、高い精度で回転誤差を検出することを可能にしている。しかし、特許文献2の噛合伝達誤差測定装置では、回転軸の回転に伴って負荷錘が上昇あるいは降下するが、その上昇あるいは降下の移動量に制限があるため、連続的に測定できない問題があった。
【0007】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、トルク変動や回転変動の影響を受けることなく噛合伝達誤差を高い精度で測定することができ、しかも連続的に測定が可能な噛合伝達誤差測定装置を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するための、請求項1にかかる発明の要旨とするところは、(a)互いに噛み合う一対の被測定歯車に一定の負荷トルクを与えつつそれら一対の被測定歯車を回転させる過程でその被測定歯車の噛合伝達誤差を測定する噛合伝達誤差測定方法において、(b)前記被測定歯車とともに第1軸心まわりに回転する第1定滑車と、回転制御モータによりその第1軸心に平行な第2軸心まわりに回転駆動される第2定滑車とを設け、(c)それら第1定滑車および第2定滑車に可撓性無端環状の動力伝達線材を巻き架け、(d)前記第1定滑車および第2定滑車の間に巻き架けられることによりそれらの間に2本架け渡された状態の前記動力伝達線材のうちの一方に所定の負荷錘を有する動滑車を架け、(e)前記第1定滑車および第2定滑車の間に2本架け渡された動力伝達線材のうちの他方に常時弛みが形成されるように前記回転制御モータを駆動することにより、前記一定の負荷トルクを付与することを特徴とする。
【0009】
また、請求項2にかかる発明の要旨とするところは、(a)互いに噛み合う一対の被測定歯車に一対のトルク付与装置から一定の負荷トルクをそれぞれ与えつつそれら一対の被測定歯車を回転させる過程でその被測定歯車の噛合伝達誤差を測定する噛合伝達誤差測定装置において、(b)前記トルク付与装置は、(c)前記被測定歯車とともに第1軸心まわりに回転する第1定滑車と、(d)回転制御モータによりその第1軸心に平行な第2軸心まわりに回転駆動される第2定滑車と、(e)前記第1定滑車および第2定滑車に巻き架けられた可撓性無端環状の動力伝達線材と、(f)前記第1定滑車および第2定滑車の間に巻き架けられることによりそれらの間に2本架け渡された状態の前記動力伝達線材のうちの一方に架けられた所定の負荷錘を有する動滑車と、(g)前記一定の負荷トルクを付与するために、前記第1定滑車および第2定滑車の間に2本架け渡された動力伝達線材のうちの他方に常時弛みが形成されるように前記回転制御モータを駆動する回転駆動制御装置とを、含み、(h)前記一対の負荷錘を適宜調整することで、非作動状態において前記一対の被測定歯車は静的に釣り合わされていることを特徴とする。
【0010】
また、請求項3にかかる発明の要旨とするところは、(a)入力軸および差動装置によって出力される一対の出力軸を備えた変速機のそれぞれの回転軸にそれぞれ設けられたトルク付与装置から一定の負荷トルクを与えつつ、それら入力軸および一対の出力軸を回転させる過程でその変速機の噛合伝達誤差を測定する噛合伝達誤差測定装置において、(b)前記トルク付与装置は、(c)前記それぞれの回転軸とともにその軸心まわりに回転する第1定滑車と、(d)回転制御モータによりその回転軸に平行な第2軸心まわりに回転駆動される第2定滑車と、(e)前記第1定滑車および第2定滑車に巻き架けられた可撓性無端環状の動力伝達線材と、(f)前記第1定滑車および第2定滑車の間に巻き架けられることによりそれらの間に2本架け渡された状態の前記動力伝達線材のうちの一方に架けられた所定の負荷錘を有する動滑車と、(g)前記一定の負荷トルクを付与するために、前記第1定滑車および第2定滑車の間に2本架け渡された動力伝達線材のうちの他方に常時弛みが形成されるように前記回転制御モータを駆動する回転駆動制御装置とを、含み、(h)前記それぞれの回転軸に設けられた負荷錘の錘を適宜調整することで、非作動状態において前記変速機は静的に釣り合わされていることを特徴とする。
【0011】
また、請求項4にかかる発明の要旨とするところは、請求項2または3に記載の噛合伝達誤差測定装置において、前記回転制御モータには、減速装置が接続されていることを特徴とする。
【発明の効果】
【0012】
請求項1にかかる発明の噛合伝達誤差測定方法によれば、第1定滑車および第2定滑車に巻き架けられている2本の可撓性無端環状の動力伝達線材の一方に所定の負荷錘を有する動滑車を架け、他方の動力伝達線材のうちの他方に常時弛みが形成されるように回転制御モータを駆動させることによって、たとえば、モータ等の回転付与装置によって、第1定滑車を回転させると同時に回転制御モータによって第2定滑車が同様に回転し、他方の動力伝達線材には常時弛みが形成され連続回転が可能になる。また、被測定歯車には動滑車および負荷錘によって常時所定の負荷トルクがかけられ、しかも他方の動力伝達線材には弛みを常時持たせることで、他方の動力伝達線材による負荷トルクの変動を阻止することができ、トルク変動等の影響がほとんど生じない状態で連続測定が可能となる。
【0013】
また、請求項2にかかる発明の噛合伝達誤差測定装置によれば、一対のトルク付与装置は、それぞれ第1定滑車および第2定滑車に巻き架けられている2本の可撓性無端環状の動力伝達線材の一方に所定の負荷錘を有する動滑車を架け、他方の動力伝達線材のうちの他方に常時弛みが形成されるように回転制御モータを駆動させることによって、たとえば、モータ等の回転付与装置によって、第1定滑車を回転させると同時に回転制御モータによって第2定滑車が同様に回転し、他方の動力伝達線材には常時弛みが形成され連続回転が可能になる。また、被測定歯車には動滑車および負荷錘によって常時所定の負荷トルクがかけられ、しかも他方の動力伝達線材には弛みを常時持たせることで、他方の動力伝達線材による負荷トルクの変動が阻止されている。また、一対の被測定歯車は一対のトルク付与装置の負荷錘を適宜調整することによって静的に釣り合わされている。こうすることで、たとえばモータ等の回転付与装置によって、一対の被測定歯車を回転させると、一対のトルク付与装置によって、一対の被測定歯車には常時トルク付与装置のみによる負荷トルクが付与され、しかも連続的に測定が可能となる。
【0014】
また、請求項3にかかる発明の噛合伝達誤差測定装置によれば、それぞれの回転軸に設けられたトルク付与装置はそれぞれ、第1定滑車および第2定滑車に巻き架けられている2本の可撓性無端環状の動力伝達線材の一方に所定の負荷錘を有する動滑車を架け、他方の動力伝達線材のうちの他方に常時弛みが形成されるように回転制御モータを駆動させることによって、たとえば、モータ等の回転付与装置によって、第1定滑車を回転させると同時に回転制御モータによって第2定滑車が同様に回転し、他方の動力伝達線材には常時弛みが形成され連続回転が可能になる。また、被測定歯車には動滑車および負荷錘によって常時所定の負荷トルクがかけられ、しかも他方の動力伝達線材には弛みを常時持たせることで、他方の動力伝達線材による負荷トルクの変動が阻止されている。また、変速機は、それぞれの回転軸に設けられているトルク付与装置の負荷錘を適宜調整することによって、釣り合わされている。こうすることで、たとえばモータ等の回転付与装置によって、変速機を回転させると、それぞれのトルク付与装置によって、それぞれの回転軸には常時トルク付与装置のみによる負荷トルクが付与され、しかも連続的に測定が可能となる。
【0015】
また、請求項4にかかる発明の噛合伝達誤差測定装置によれば、回転制御モータに減速装置が接続されることで、回転制御モータの出力を補うことができ、また、回転制御モータを小さくすることができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
【0017】
図1は本発明が適用された歯車の噛合伝達誤差測定装置10の簡略図である。噛合伝達誤差測定装置10は、図示しない軸受により回転可能に支持された第1メイン軸12および第1メイン軸12に平行に配置され図示しない軸受により回転可能に支持された第1カウンタ軸14を備えている。第1メイン軸12には、第1試験歯車16が相対回転不能に取り付けられ、一方、第1カウンタ軸14には第1試験歯車16と噛み合う状態で第2試験歯車18が相対回転不能に取り付けられている。第1メイン軸12と第1カウンタ軸14との軸間距離は、一対の第1試験歯車16および第2試験歯車18の中心距離に設定されており、第1試験歯車16および第2試験歯車18は、それぞれ第1メイン軸12および第1カウンタ軸14に着脱可能に取り付けられるようになっている。第1メイン軸12には、第1試験歯車16とともに第1メイン軸12まわりを回転する第1メイン軸定滑車20が相対回転不能に設けられており、第1メイン軸12の第1試験歯車16の反対側端部には、駆動モータ22が連結されており、第1メイン軸定滑車20と第1試験歯車16との間には、回転角を検出するためのロータリエンコーダ17が組み込まれている。また、紐やワイヤー等から成る動力伝達線材24が架け渡されることによって第1メイン軸定滑車20と作動的に連結される第2メイン軸定滑車26が配置され、第1メイン軸12に平行な第2メイン軸27を介して、第1回転制御モータ28が連結されている。ここで、駆動モータ22および第1回転制御モータ28には、たとえば同期モータ等の制御可能なモータが使用される。なお、本実施例の第1試験歯車16および第2試験歯車18が本発明の互いに噛み合う一対の被測定歯車に対応しており、第1メイン軸定滑車20および第2メイン軸定滑車26が本発明の第1定滑車および第2定滑車に対応しており、第1メイン軸12および第2メイン軸27が本発明の第1軸および第2軸に対応しており、第1回転制御モータ28が本発明の回転制御モータに対応している。
【0018】
図2は、第1メイン軸定滑車20および第2メイン軸定滑車26を矢印A方向から見た矢視図である。ここで、第1メイン軸定滑車20は駆動モータ22に連結されており、第2メイン軸定滑車26は第1回転制御モータ28に連結され、互いの定滑車の径寸法は等しくされている。第1メイン軸定滑車20および第2メイン軸定滑車26には可撓性無端環状の動力伝達線材24が巻き架けられており、その動力伝達線材24によって作動的に連結されている。ここで、第1メイン軸定滑車20と第2メイン軸定滑車26との間に巻き架けられることで架け渡された2本の動力伝達線材24のうち、実線で示される側の動力伝達線材24には、第1負荷錘30を有する第1動滑車29が架けられている。一方、第1メイン軸定滑車20と第2メイン軸定滑車26との間に巻き架けられることで架け渡された2本の動力伝達線材24のうち、破線で示される側の動力伝達線材24には常時弛みが形成されている。なお、本実施例の第1動滑車29が本発明の動滑車に対応しており、第1負荷錘30が本発明の負荷錘に対応している。
【0019】
図1に戻り、第1カウンタ軸14の第2試験歯車18の反対側端部には、第2試験歯車18とともに第1カウンタ軸14まわりを回転する第1カウンタ軸定滑車32が相対回転不能に設けられており、第2試験歯車18と第1カウンタ軸定滑車32との間にはロータリエンコーダ33が組み込まれている。また、動力伝達線材24によって第1カウンタ軸定滑車32と作動的に連結する第2カウンタ軸定滑車36が配置され、第1カウンタ軸14に平行な第2カウンタ軸37を介して、第2回転制御モータ38が連結されている。ここで、第2回転制御モータ38には、たとえば同期モータ等の制御可能なモータが使用される。なお、本実施例の第1カウンタ軸定滑車32および第2カウンタ軸定滑車36が本発明の第1定滑車および第2定滑車に対応しており、第1カウンタ軸14および第2カウンタ軸37が本発明の第1軸および第2軸に対応しており、第2回転制御モータ38が本発明の回転制御モータに対応している。
【0020】
図3は、第1カウンタ軸定滑車32および第2カウンタ軸定滑車36を矢印B方向から見た矢視図である。ここで、第1カウンタ軸定滑車32は、第1カウンタ軸14に連結されており、第2カウンタ軸定滑車36は、第2回転制御モータ38に連結されており、互いの定滑車の径寸法は等しくされている。第1カウンタ軸定滑車32および第2カウンタ軸定滑車36には動力伝達線材24が巻き架けられており、その動力伝達線材24によって作動的に連結されている。ここで、第1カウンタ軸定滑車32と第2カウンタ軸定滑車36との間に巻き架けられることで架け渡された2本の動力伝達線材24のうち、実線で示される側の動力伝達線材24には、第2負荷錘42を有する第2動滑車40が架けられている。一方、第1カウンタ軸定滑車32と第2カウンタ軸定滑車36との間に巻き架けられることで架け渡された2本の動力伝達線材24のうち、破線で示される側の動力伝達線材24には、常時弛みが形成されている。なお、本実施例の第2動滑車40が、本発明の動滑車に対応しており、第2負荷錘42が本発明の負荷錘に対応している。
【0021】
また、第1回転制御モータ28、第2回転制御モータ38、および駆動モータ22が非作動の状態において、噛合伝達誤差測定装置10が静的に釣り合うように第1負荷錘30および第2負荷錘42の質量がそれぞれ調整される。つまり、互いに噛み合うことで作用し合う第1試験歯車16および第2試験歯車18の反力が等しくなるように第1負荷錘30および第2負荷錘42の質量が調整される。たとえば、第1メイン軸定滑車20と第1カウンタ軸定滑車32との径寸法が等しく且つ第1動滑車29および第2動滑車40の質量が等しい場合では、第1負荷錘30と第2負荷錘42との比が、第1試験歯車16のピッチ半径と第2試験歯車18のピッチ半径との比と等しくなるように設定される。なお、第1メイン軸定滑車20の径寸法と第1カウンタ軸定滑車32の径寸法との比が第1試験歯車16のピッチ半径と第2試験歯車18のピッチ半径との比と等しくすると第1負荷錘30および第2負荷錘42の質量を等しくすることもできる。
【0022】
また、噛合伝達誤差測定装置10は、電子制御装置44によって制御される。たとえば駆動モータ22によって噛合伝達誤差測定装置10を作動させると、駆動モータ22の回転数をロータリエンコーダ17によって検出し、第1回転制御モータ28が、電子制御装置44によって、ロータリエンコーダ17によって得られた回転数と同じ回転数となるように同期させられる。すなわち、駆動モータ22の回転数と第1制御モータ28の回転数が等しくなるように同期させられる。ここで図2に示すように、第1メイン軸定滑車20と第2メイン軸定滑車26の径寸法は等しく互いに同じ回転数で回転させられるため、第1メイン軸定滑車20が動力伝達線材24を移動させる速度と第2メイン軸定滑車26が動力伝達線材24を移動させる速度が等しくなり、第1動滑車29の位置および動力伝達線材24の弛みの形状が変化することなく連続的に回転させることが可能となる。さらに、長時間測定する場合では、動力伝達線材24は微少な回転数のずれによって弛みがなくなり、第1動滑車29の位置が上下する恐れがあるが、第1動滑車29に設けられている図示しない位置検出センサーによって、第1動滑車29の位置が逐次検出され、電子制御装置44に入力される。この情報をもとに、電子制御装置44が駆動モータ22および第1回転制御モータ28を好適に制御することで第1動滑車29の位置は常時一定に保たれるとともに、動力伝達線材24には常時弛みが形成される。なお、これら第1メイン軸定滑車20、第2メイン軸定滑車26、動力伝達線材24、第1動滑車29、第1負荷錘30、および電子制御装置44によって、トルク付与装置46が構成される。また、本実施例の電子制御装置44が本発明の回転駆動制御装置に対応している。
【0023】
同様に、駆動モータ22の作動により、第1試験歯車16および第2試験歯車18が回転することで第1カウンタ軸14が回転させられるが、その回転数をロータリエンコーダ33によって検出し、第2回転制御モータ38が、電子制御装置44によって、ロータリエンコーダ33によって得られた回転数と同じ回転数となるように同期させられる。すなわち、第1カウンタ軸14の回転数と第2回転制御モータ38の回転数が等しくなるように同期させられる。ここで図3に示すように、第1カウンタ軸定滑車32と第2カウンタ軸定滑車36の径寸法は等しく互いに同じ回転数で回転させられるため、第1カウンタ軸定滑車32が動力伝達線材24を移動させる速度と第2カウンタ軸定滑車36が動力伝達線材24を移動させる速度とが等しくなり、第2動滑車40の位置および動力伝達線材24の弛みの形状が変化することなく連続的に回転させることが可能となる。さらに、長時間測定する場合では、動力伝達線材24は微少な回転するのずれによって弛みがなくなり、第2動滑車40の位置が上下する恐れがあるが、第2動滑車40に設けられている図示しない位置検出センサーによって、第2動滑車40の位置が逐次検出され、電子制御装置44に入力される。この情報をもとに、電子制御装置44が第2回転制御モータ38を好適に制御することで第2動滑車40の位置は常時一定に保たれるとともに、動力伝達線材24には常時弛みが形成される。なお、これら第1カウンタ軸定滑車32、第2カウンタ軸定滑車36、動力伝達線材24、第2動滑車40、第2負荷錘42、および電子制御装置44によって、トルク付与装置48が構成される。
【0024】
このように構成される噛合伝達誤差測定装置10において、駆動モータ22によって低速回転で装置を作動させると、第1試験歯車16および第2試験歯車18は噛み合った状態で釣り合わされているので、駆動モータ22には反力が生じず、第1試験歯車16および第2試験歯車18にかかる負荷トルクはそれぞれの回転軸に設けられたトルク付与装置46および48によってかけられる負荷トルクのみとなる。具体的には、第1動滑車29および第1負荷錘30の荷重を加えた荷重の半分の荷重と第1メイン軸定滑車20の半径寸法の積が負荷トルクとして第1試験歯車16にかけられる。同様に、第2動滑車40および第2負荷錘42の荷重を加えた荷重の半分の荷重と第1カウンタ軸定滑車32の半径寸法の積が負荷トルクとして第2試験歯車18にかけられる。これより、駆動モータ22で装置を駆動させながらエンコーダ17および33によってそれぞれの回転角を測定することにより、その回転角の位相のずれから噛合伝達誤差を検出できる。
【0025】
上述のように、本実施例によれば、第1試験歯車16にはトルク付与装置46によって負荷トルクを付与し、第2試験歯車18にはトルク付与装置48によっ負荷トルクを付与し、非作動状態において第1試験歯車16および第2試験歯車18が互いに静的に釣り合うように調整することで、それぞれの試験歯車に生じる負荷トルクは、トルク付与装置46および48によるもののみとなる。また、トルク付与装置46および48の構造上、連続的に測定が可能であり、しかもトルク変動はほとんど生じないため、高い精度で測定が可能となる。
【0026】
つぎに、本発明の他の実施例を説明する。なお、以下の説明において前述の実施例と共通する部分には同一の符号を付して説明を省略する。
【0027】
図4は、本発明の他の実施例である噛合伝達誤差測定装置50の簡略図である。なお、本実施例においても噛合伝達誤差測定装置50は図示しない電子制御装置によって前述の実施例と同様に制御されている。図4に示されるように、噛合伝達誤差測定装置50は、前述の噛合伝達誤差測定装置10に減速機を設けたものである。具体的には、第1回転制御モータ28と第2メイン軸定滑車26との間に減速機52が介装されることによって第1回転制御モータ28の回転が減速される。一方、第2カウンタ軸定滑車36と第2回転制御モータ38との間に減速機54が介装されることによって第2回転制御モータ38の回転が減速される。また、噛合伝達誤差測定装置50の他の構成および作動については、前述の噛合伝達誤差測定装置10と同様であるため、同様の効果を得ることができる。なお、第1回転制御モータ28および第2回転制御モータ38の回転数は減速機52および54の減速比を考慮して決定される。
【0028】
このように、前述の実施例によれば、噛合伝達誤差測定装置50は、前述の噛合伝達誤差測定装置10と同様に高い精度で且つ連続的に測定することが可能であり、しかも減速機52および減速機54によって、第1回転制御モータ28および第2回転制御モータ38の回転力が補助される。これより第1回転制御モータ28および第2回転制御モータ38のトルク不足を補うことができ、第1回転制御モータ28および第2回転制御モータ38をコンパクトにすることもできる。
【0029】
つぎに、本発明のさらに他の実施例を説明する。図5は、本発明のさらに他の実施例である噛合伝達誤差測定装置70の簡略図である。なお、本実施例においても噛合伝達誤差測定装置70は図示しない電子制御装置によって前述の実施例と同様に制御されている。図5に示されるように、噛合伝達誤差測定装置70の試験歯車は、互いに噛み合う一対の傘歯車72となっており、第1メイン軸12および第1カウンタ軸14は互いに直交している。ここで、噛合伝達誤差測定装置70の他の構成および作動については、前述の噛合伝達誤差測定装置10と同様であるため、同様の効果を得ることができる。
【0030】
このように、前述の実施例によれば、噛合伝達誤差測定装置70は、前述の噛合伝達誤差測定装置10と同様に高い精度で且つ連続的に測定することが可能であり、しかも、傘歯車やハイポイドギヤ等の回転軸心が垂直に変化するような態様の歯車でも測定が可能となる。
【0031】
つぎに、本発明のさらに他の実施例を説明する。図6は、本発明のさらに他の実施例である変速機82の噛合伝達誤差測定装置80の簡略図である。なお、本実施例においても噛合伝達誤差測定装置80は、図示しない電子制御装置によって前述の実施例と同様に制御されている。図6に示されるように、変速機82は、前輪駆動方式の変速機82となっており、入力軸84と、変速機82内の図示しない差動装置によって出力軸86および88の一対の出力軸と、を備えている。これにより、噛合伝達誤差測定装置80は、入力軸84に設けられたトルク付与装置90並びに出力軸86および88に設けられたトルク付与装置92および94の3つのトルク付与装置が設けられ、各軸にロータリエンコーダ96が組み込まれている。
【0032】
また、トルク付与装置80は、図2と同様の構造となっており、トルク付与装置92および94は図3と同様の構造となっており、出力軸86の軸端には、駆動モータ22が連結されている。ここで、トルク付与装置90、92および94の各負荷錘の質量は、変速機82の変速比を考慮して噛合伝達誤差測定装置80の非作動時において静的に釣り合いが保てるように調整される。また、噛合伝達誤差測定装置80の他の構成および作動については、前述の噛合伝達誤差測定装置10と同様であるため、同様の効果を得ることができる。
【0033】
このように、前述の実施例によれば、噛合伝達誤差測定装置80は、前述の噛合伝達誤差測定装置10と同様に高い精度で且つ連続的に測定することが可能であり、しかも、変速機82のように測定軸が増加しても、トルク付与装置を増やし、前述の実施例と同様に各負荷錘を調整すれば、容易に測定することが可能となる。
【0034】
以上、本発明の実施例を図面に基づいて詳細に説明したが、本発明はその他の態様においても適用される。
【0035】
たとえば、噛合伝達誤差測定装置10の駆動モータ22の位置は、第1メイン軸12に設けられているが、第1カウンタ軸14側に設けて実施することもできる。すなわち、駆動モータ22自体はトルク付与に関与するモータではなく、装置を回転させるためのものであるため、装置に矛盾の生じない範囲で自由に駆動モータ22を設けて実施することができる。なお、他の実施例においても同様に駆動モータ22の位置を変更して実施することができる。また、本実施例では、駆動源として駆動モータ22を設けているが、特にモータである必要はなく、手動など他の駆動源を用いて実施することもできる。
【0036】
また、前述の実施例では、第1メイン軸定滑車20および第2メイン軸定滑車の径寸法が等しくされているが、それぞれの径寸法が異なっても実施は可能である。同様に、第1カウンタ軸定滑車32および第2カウンタ軸定滑車36の径寸法が異なっていても実施は可能である。
【0037】
また、前述の実施例では、動力伝達線材24は紐、ワイヤー等で構成されているが、ケーブル、ロープ、Vベルト、丸ベルト、平ベルト等で実施することもできる。また、滑りを抑制するために、定滑車をスプロケットで構成し、動力伝達線材24をチェーンに変えて実施することもできる。
【0038】
また、前述の実施例では、各第1定滑車と被測定歯車とは同心軸上に配設されているが、特に同心軸上に配設する必要はなく、ベルトやチェーン等を介して作動的に連結されるように配設することもできる。すなわち、定トルクを付与可能に作動的に連結されていれば問題はない。
【0039】
また、前述の実施例では、噛合伝達誤差測定装置50には減速機52および54が設けられているが、減速機は回転制御モータと一体型になっているものであっても構わない。
【0040】
また、前述の実施例では、噛合伝達誤差測定装置70では、傘歯車が測定されるが、本発明の噛合伝達誤差測定装置は、ねじ歯車など他の態様の歯車においても、適用することができる。
【0041】
また、前述の実施例では、変速機82は、前輪駆動方式の変速機82となっているが、後輪駆動方式等の他の形式の変速機であっても本発明は適用することができる。
【0042】
また、前述の実施例では、動滑車29および40の位置を制御することで噛合伝達誤差測定装置10の連続測定を可能としているが、動力伝達線材24の弛みの位置を制御することで連続測定を可能にすることもできる。
【0043】
なお、上述したのはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【図面の簡単な説明】
【0044】
【図1】本発明が適用された噛合伝達誤差測定装置の簡略図である。
【図2】トルク付与装置を矢印A方向から見た矢視図である。
【図3】トルク付与装置を矢印B方向から見た矢視図である。
【図4】本発明が適用された噛合伝達誤差測定装置の他の簡略図である。
【図5】本発明が適用された噛合伝達誤差測定装置の更に他の簡略図である。
【図6】本発明が適用された噛合伝達誤差測定装置の更に他の簡略図である。
【符号の説明】
【0045】
10、50、70、80:噛合伝達誤差測定装置 12:第1メイン軸(第1軸) 14:第1カウンタ軸(第1軸) 16:第1試験歯車(被測定歯車) 18:第2試験歯車(被測定歯車) 20:第1メイン定滑車(第1定滑車)24:動力伝達線材 26:第2メイン軸定滑車(第2定滑車) 27:第2メイン軸(第2軸) 28:第1回転制御モータ(回転制御モータ) 29:第1動滑車(動滑車) 30:第1負荷錘(負荷錘) 32:第1カウンタ軸定滑車(第1定滑車) 36:第2カウンタ軸定滑車 37:第2カウンタ軸(第2軸) 38:第2回転制御モータ(回転制御モータ) 40:第2動滑車(動滑車) 42:第2負荷錘(負荷錘) 44:電子制御装置(回転駆動制御装置) 46、48トルク付与装置 52、54:減速機 82:変速機 84:入力軸 86、88:出力軸 90、92、94:トルク付与装置
【特許請求の範囲】
【請求項1】
互いに噛み合う一対の被測定歯車に一定の負荷トルクを与えつつ該一対の被測定歯車を回転させる過程で該被測定歯車の噛合伝達誤差を測定する噛合伝達誤差測定方法であって、
前記被測定歯車とともに第1軸心まわりに回転する第1定滑車と、回転制御モータにより該第1軸心に平行な第2軸心まわりに回転駆動される第2定滑車とを設け、
それら第1定滑車および第2定滑車に可撓性無端環状の動力伝達線材を巻き架け、
前記第1定滑車および第2定滑車の間に巻き架けられることによりそれらの間に2本架け渡された状態の前記動力伝達線材のうちの一方に所定の負荷錘を有する動滑車を架け、
前記第1定滑車および第2定滑車の間に2本架け渡された動力伝達線材のうちの他方に常時弛みが形成されるように前記回転制御モータを駆動することにより、前記一定の負荷トルクを付与することを特徴とする噛合伝達誤差測定方法。
【請求項2】
互いに噛み合う一対の被測定歯車に一対のトルク付与装置から一定の負荷トルクをそれぞれ与えつつ該一対の被測定歯車を回転させる過程で該被測定歯車の噛合伝達誤差を測定する噛合伝達誤差測定装置であって、
前記トルク付与装置は、
前記被測定歯車とともに第1軸心まわりに回転する第1定滑車と、
回転制御モータにより該第1軸心に平行な第2軸心まわりに回転駆動される第2定滑車と、
前記第1定滑車および第2定滑車に巻き架けられた可撓性無端環状の動力伝達線材と、
前記第1定滑車および第2定滑車の間に巻き架けられることによりそれらの間に2本架け渡された状態の前記動力伝達線材のうちの一方に架けられた所定の負荷錘を有する動滑車と、
前記一定の負荷トルクを付与するために、前記第1定滑車および第2定滑車の間に2本架け渡された動力伝達線材のうちの他方に常時弛みが形成されるように前記回転制御モータを駆動する回転駆動制御装置とを、含み、
前記一対の負荷錘を適宜調整することで、非作動状態において前記一対の被測定歯車は静的に釣り合わされていることを特徴とする噛合伝達誤差測定装置。
【請求項3】
入力軸および差動装置によって出力される一対の出力軸を備えた変速機のそれぞれの回転軸にそれぞれ設けられたトルク付与装置から一定の負荷トルクを与えつつ、該入力軸および一対の出力軸を回転させる過程で該変速機の噛合伝達誤差を測定する噛合伝達誤差測定装置であって、
前記トルク付与装置は、
前記それぞれの回転軸とともにその軸心まわりに回転する第1定滑車と、
回転制御モータにより該回転軸に平行な第2軸心まわりに回転駆動される第2定滑車と、
前記第1定滑車および第2定滑車に巻き架けられた可撓性無端環状の動力伝達線材と、
前記第1定滑車および第2定滑車の間に巻き架けられることによりそれらの間に2本架け渡された状態の前記動力伝達線材のうちの一方に架けられた所定の負荷錘を有する動滑車と、
前記一定の負荷トルクを付与するために、前記第1定滑車および第2定滑車の間に2本架け渡された動力伝達線材のうちの他方に常時弛みが形成されるように前記回転制御モータを駆動する回転駆動制御装置とを、含み、
前記それぞれの回転軸に設けられた負荷錘の錘を適宜調整することで、非作動状態において前記変速機は静的に釣り合わされていることを特徴とする噛合伝達誤差測定装置。
【請求項4】
前記回転制御モータには、減速装置が接続されていることを特徴とする請求項2または3に記載の噛合伝達誤差測定装置。
【請求項1】
互いに噛み合う一対の被測定歯車に一定の負荷トルクを与えつつ該一対の被測定歯車を回転させる過程で該被測定歯車の噛合伝達誤差を測定する噛合伝達誤差測定方法であって、
前記被測定歯車とともに第1軸心まわりに回転する第1定滑車と、回転制御モータにより該第1軸心に平行な第2軸心まわりに回転駆動される第2定滑車とを設け、
それら第1定滑車および第2定滑車に可撓性無端環状の動力伝達線材を巻き架け、
前記第1定滑車および第2定滑車の間に巻き架けられることによりそれらの間に2本架け渡された状態の前記動力伝達線材のうちの一方に所定の負荷錘を有する動滑車を架け、
前記第1定滑車および第2定滑車の間に2本架け渡された動力伝達線材のうちの他方に常時弛みが形成されるように前記回転制御モータを駆動することにより、前記一定の負荷トルクを付与することを特徴とする噛合伝達誤差測定方法。
【請求項2】
互いに噛み合う一対の被測定歯車に一対のトルク付与装置から一定の負荷トルクをそれぞれ与えつつ該一対の被測定歯車を回転させる過程で該被測定歯車の噛合伝達誤差を測定する噛合伝達誤差測定装置であって、
前記トルク付与装置は、
前記被測定歯車とともに第1軸心まわりに回転する第1定滑車と、
回転制御モータにより該第1軸心に平行な第2軸心まわりに回転駆動される第2定滑車と、
前記第1定滑車および第2定滑車に巻き架けられた可撓性無端環状の動力伝達線材と、
前記第1定滑車および第2定滑車の間に巻き架けられることによりそれらの間に2本架け渡された状態の前記動力伝達線材のうちの一方に架けられた所定の負荷錘を有する動滑車と、
前記一定の負荷トルクを付与するために、前記第1定滑車および第2定滑車の間に2本架け渡された動力伝達線材のうちの他方に常時弛みが形成されるように前記回転制御モータを駆動する回転駆動制御装置とを、含み、
前記一対の負荷錘を適宜調整することで、非作動状態において前記一対の被測定歯車は静的に釣り合わされていることを特徴とする噛合伝達誤差測定装置。
【請求項3】
入力軸および差動装置によって出力される一対の出力軸を備えた変速機のそれぞれの回転軸にそれぞれ設けられたトルク付与装置から一定の負荷トルクを与えつつ、該入力軸および一対の出力軸を回転させる過程で該変速機の噛合伝達誤差を測定する噛合伝達誤差測定装置であって、
前記トルク付与装置は、
前記それぞれの回転軸とともにその軸心まわりに回転する第1定滑車と、
回転制御モータにより該回転軸に平行な第2軸心まわりに回転駆動される第2定滑車と、
前記第1定滑車および第2定滑車に巻き架けられた可撓性無端環状の動力伝達線材と、
前記第1定滑車および第2定滑車の間に巻き架けられることによりそれらの間に2本架け渡された状態の前記動力伝達線材のうちの一方に架けられた所定の負荷錘を有する動滑車と、
前記一定の負荷トルクを付与するために、前記第1定滑車および第2定滑車の間に2本架け渡された動力伝達線材のうちの他方に常時弛みが形成されるように前記回転制御モータを駆動する回転駆動制御装置とを、含み、
前記それぞれの回転軸に設けられた負荷錘の錘を適宜調整することで、非作動状態において前記変速機は静的に釣り合わされていることを特徴とする噛合伝達誤差測定装置。
【請求項4】
前記回転制御モータには、減速装置が接続されていることを特徴とする請求項2または3に記載の噛合伝達誤差測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−163156(P2007−163156A)
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願番号】特願2005−356289(P2005−356289)
【出願日】平成17年12月9日(2005.12.9)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願日】平成17年12月9日(2005.12.9)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]