
回転角度および回転中心座標の決定方法
【課題】回転角度および回転中心座標を正確かつ簡単に取得する。
【解決手段】画素のグループGiが同じ配列軸に沿って配列され、前記各グループGiがこの軸に沿った各縦座標xiに関連付けられるN個の異なる画素のグループGiを、前記第1画像から選択し(68、84)、前記各グループGiに対して、前記配列軸と直交する方向に対する前記第1画像と前記第2画像との間の前記グループGiの移動量yiを計算し(72)、次の式を最小にする線形回帰直線の係数aおよびbに基づいて、前記回転角度および前記回転中心座標を計算する(86)。
【数1】

Nは、3以上の前記グループGiの数
【解決手段】画素のグループGiが同じ配列軸に沿って配列され、前記各グループGiがこの軸に沿った各縦座標xiに関連付けられるN個の異なる画素のグループGiを、前記第1画像から選択し(68、84)、前記各グループGiに対して、前記配列軸と直交する方向に対する前記第1画像と前記第2画像との間の前記グループGiの移動量yiを計算し(72)、次の式を最小にする線形回帰直線の係数aおよびbに基づいて、前記回転角度および前記回転中心座標を計算する(86)。
【数1】
Nは、3以上の前記グループGiの数
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転角度および回転中心座標の決定方法に関する。また、本発明の主題は、スクリーン制御方法、およびこの方法を実行するための情報記録媒体に関する。さらに、本発明は、スクリーンを備え、この制御方法を実行することができる装置にも関する。
【背景技術】
【0002】
回転角度および回転中心座標を決定する公知の方法は、
− 画像面に垂直な軸の回りにパターンを回転させる前に、電子センサにより、前記パターンの第1画像を取得し、
− 前記電子センサに対して、人により前記画像面に垂直な軸の回りに、前記パターンを回転させ、
− 前記パターンの回転後、前記電子センサにより同じパターンの第2画像を取得し、画素により構成される前記第1画像および第2画像を電子メモリに記憶させ、
− 画素のグループGiが同じ配列軸に沿って配列され、前記各グループGiが、この軸に沿った各縦座標xiに関連付けられ、添え字iによりN個の画素の前記グループGiの中から前記グループGiが特定される、N個の異なる画素の前記グループGiを、電子コンピュータにより前記第1画像から選択し、
− 移動量yiは、前記グループGiに属する前記第1画像の画素と、第2画像の画素との相関の計算から得られる移動量であり、前記各グループGiに対して、前記電子コンピュータにより、前記第1画像と第2画像とを比較し、前記配列軸に垂直な方向に対する前記第1画像と第2画像との間のグループGiの移動量yiを計算するようになっている。
【0003】
例えば、このような方法は、米国特許出願公開第2005/0012714号明細書(特許文献1)に開示されている。この方法は、極めて簡単であり、実行するために、限られたコンピュータの能力しか必要としない。そのため、携帯端末や携帯電話として知られている携帯電子機器のように、コンピュータ資源が限られている電子機器により実行することができる。
【0004】
しかしながら、この方法では、決定される回転角度の精度はあまり良くない。実際、回転角度は、回転中心に対してのみ正確に計算可能である。特許文献1では、回転中心の位置を正確に決定する方法については、開示されていない。より正確には、この特許文献では、回転中心の位置は、2つのウインドウの交点、すなわち、電子センサの実質上の中央に仮定されている。従って、このような仮定は、回転中心の実際の位置を正確に示していない。回転中心の位置を正確に決定していないため、計算された回転角度もまた、あまり正確ではない。
【0005】
一般的に、回転中心の位置を正確に決定することは、困難である。当然のことであるが、回転中心に近いパターンの移動の幅は、小さく、従って、S/N比はあまり良くない。そのため、回転角度および回転中心座標を取得するための他の方法が考えられていた。例えば、特許文献2(米国特許出願公開第2001/0036299号)を参照することができる。しかしながら、この方法は、取得した画像に対して、かなりの計算能力が要求される複雑な計算が必要である。従って、かなりのコンピュータ資源を有する機器でなければ、実行することができない。
【0006】
また、先行技術としては、以下のものが知られている。
特許文献3(米国特許第5563403号明細書)
特許文献4(米国特許第4558461号明細書)
特許文献5(特開平10-027246号公報)
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国特許出願公開第2005/0012714号明細書
【特許文献2】米国特許出願公開第2001/0036299号明細書
【特許文献3】米国特許第5563403号明細書
【特許文献4】米国特許第4558461号明細書
【特許文献5】特開平10-027246号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、上記の欠点を改善し、回転角度および回転中心座標を、正確かつ簡単に取得することができ、限られた計算能力を有する機器により実行することのできる方法を提供することを目的としている。
【課題を解決するための手段】
【0009】
従って、この発明の主題は、請求項1に係る方法である。
【0010】
上記の方法は、画素のグループGiが回転前に配列軸Mに沿って配列されているとすると、回転後、軸Mに対して角度aとなる軸M′に沿って配列される、という仮定に基づいている。角度aは、回転角度である。さらに、軸Mと軸M′との交点は、回転中心に対応する。実際、単純な回転は、グループGiの配列を変更しない。その結果、線形回帰により計算された係数aおよびbから、軸M′の式を求めることができ、従って、回転角度および回転中心の座標を求めることができる。係数aおよびbを線形回帰により計算できるため、疑似現象を考慮した最良の方法で補正することができる。なお、疑似現象とは、パターンが生成される素材の弾性変形による回転後のグループGiの調整不良、回転と同時のパターンの移動等である。
【0011】
上記の方法では、移動量yiが、グループGiに属する前記第1画像の画素と前記第2画像の画素との相関から計算されるため、グループGiの画素が表しているものについての特別な知識は必要ない。従って、記載された方法は、回転対称ではない任意のパターンに適用される。
【0012】
上記の方法は、回転角度及び回転中心の座標を、米国特許出願公開第2005/0012714号に記載されている方法よりも、はるかに正確に決定することを可能とする。例えば、上記の方法は、回転中心の位置に関して、いかなる仮定も必要としない。また、米国特許出願公開第2005/0012714号の場合のように、回転中心の縦座標を2つの画素のグループGi間の境界とする必要もない。
【0013】
さらに、上記の方法は、同一の軸に沿って配列されているN個の画素のグループGiだけを使用する。従って、画像の全ての画素を使用して計算する必要がない。このことは、実行される処理回数を制限し、従って、この方法を実施するために必要な計算能力は減少する。
【0014】
また、係数aおよびbが線形回帰により計算されるため、計算が簡単となり、また、この方法を実施するために必要な計算能力が抑制される。
【0015】
従って、上記の方法は、実行速度が速く、適切な時間で実行するための相当な計算能力を必要としない。
【0016】
この方法の実施形態は、従属する請求項の1つ以上の特徴を備えることができる。
【0017】
さらに、この方法の実施形態は、以下の利点を有する。
− 回転角度および回転中心を計算するため、1つのウインドウの画素だけを使用することにより、実行の処理回数を減少させることを可能とする。従って、この方法を実行するために必要な計算能力を減少させることを可能とする。
− このウインドウに含まれる画素だけを取得することにより、処理速度を速くすることを可能とし、また、電子センサの電力消費を少なくすることを可能とする。
− また、ウインドウをN個の区域Siに分割することにより、回転角度および回転中心の座標を計算するために実行される処理回数を減少させることを可能とする。
− 移動量yiが所定の閾値を超えた場合、移動量yiおよび縦座標xiを考慮しないことにより、異常点を除去し、従って、実行される処理回数を増加させることなく、計算精度を向上させることを可能とする。
− 計算された角度を0.5〜10°の範囲に維持するため、前回計算された角度の関数として、前記第1画像および前記第2画像を取得する時間間隔を調節することにより、これらの回転角度の値に対して、前記第1画像および前記第2画像が移動量yiを正確に計算するのに十分に重なるため、前記方法の精度を向上させることを可能とする。
【0018】
また、本発明の主題は、
− 電子コンピュータにより、取得した回転角度および回転中心の座標の関数として、スクリーンに表示された対象を回転させるため、前記スクリーンを制御し、
− 上記の方法を実行することにより、前記回転角度を取得する、
表示スクリーン制御方法である。
【0019】
また、本発明の主題は、電子コンピュータにより命令が実行されるときに、上記の方法を実行するための前記命令を備える情報記録媒体である。
【0020】
また、本発明の主題は、請求項9に係る装置である。
【0021】
この装置の実施形態は、次の特徴を備えることができる。すなわち、前記電子センサを、指紋センサまたは光学式マウスとする。
【図面の簡単な説明】
【0022】
本発明は、以下の制限されることのない例、および図面を参照することのより、一層良く理解することができると思う。
【0023】
【図1】回転角度および回転中心座標を取得できる装置の概略図である。
【図2】図1の装置に使用される電子センサの概略図である。
【図3】図2の電子センサの検知面における画素配置の部分概略図である。
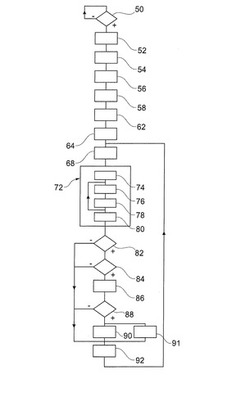
【図4】回転角度および回転中心座標の取得方法のフローチャートである。
【図5】図4の方法を実行するために実施される処理の概略図である。
【図6】図4の方法を実行するために実施される処理の概略図である。
【図7】複数の区域に分割され、図4の方法で使用される画素ウインドウの概略図である。
【0024】
これらの図において、同一の符号は、同一の構成要素を示している。
【0025】
以下の説明において、当業者に周知の特徴および機能については、詳細に説明しない。
【発明を実施するための形態】
【0026】
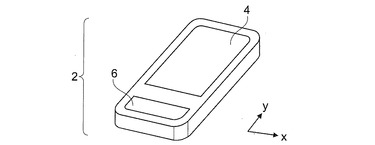
図1は、回転角度および回転中心座標を取得することのできる電子装置2を示す。この目的のために、電子装置2は、例として、スクリーン4と、接触型マンマシンインタフェース6とを備えている。接触型マンマシンインタフェース6は、例えば、スクリーン4に表示された対象を移動させるために使用される。ここでの説明では、特に、スクリーン4に表示された対象の回転移動を扱う。スクリーン4に表示された対象を回転移動させるため、接触型マンマシンインタフェース6を介して、回転角度θおよび回転中心の座標Cを予め取得する必要がある。
【0027】
そのため、この実施形態では、ユーザは、接触型マンマシンインタフェース6の所望の回転中心の位置に指を置き、次いで、所望の回転角度θを指示するため、接触型マンマシンインタフェース6の表面に垂直な軸の回りに指を回転させる。この実施形態では、この操作は、ユーザが特にX方向の回転中心の位置を指示することを可能にする。
【0028】
ユーザの指は、パターンの回転角度θを検出できる回転対称ではないパターンを有する。このパターンは、ユーザ、すなわち、人により直接移動される。指の場合、このパターンは、「指紋」と称される。指紋は、隆起部により互いに分離された谷またはくぼみを備えている。
【0029】
接触型マンマシンインタフェース6は、くぼみと隆起部とを識別する十分に良好な解像度で、指紋の画像を取得することが可能である。
【0030】
取得した画像は、X方向に平行な水平の行と、Y方向に平行な列とに整列された画素の行列により構成されている。くぼみと隆起部とを識別できるように、画素のX方向またはY方向の最大幅は、250μmよりも小さく、好ましくは、100μmまたは75μmよりも小さい。この最大幅は、50μm以下であると有利である。ここでは、約500dpi(ドット/インチ=ドット/25,4mm)の解像度に対応するように、画素は、50μm×50μmの正方形である。
【0031】
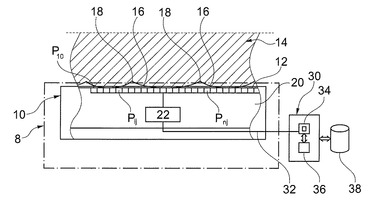
図2は、電子装置2のさらに詳細な1つの態様を示し、特に、接触型マンマシンインタフェース6の特定の実施形態を示す。この実施形態では、接触型マンマシンインタフェース6は、温度パターンを検出可能な電子センサ8に基づいて実施される。
【0032】
温度パターンは、電子センサ8の電子チップ10に基づいて識別可能な対象の温度特性の非同次空間分布である。一般的に、このような温度パターンは、対象によって生成される。この実施形態では、指紋は、電子センサ8により検出可能な温度パターンである。
【0033】
「温度特性」という表現は、熱容量および熱伝導率の関数である対象の特性を意味する。
【0034】
以下において、電子センサ8は、指紋の検出に特に適する特定の場合のものとして説明する。この特定の場合において、電子センサ8は、指紋センサとして良く知られている。
【0035】
電子チップ10は、作図される温度パターンを有する対象が接触する検知面12を備えている。この対象は、表皮が検知面12に直接置かれる指14である。指14の表皮にある指紋は、くぼみ18により分離された隆起部16の存在によって明らかにされる。図2では、隆起部16を描写してくぼみ18が視認できるように、指14が数倍に拡大されている。
【0036】
指14を検知面12に置くと、隆起部16だけが、検知面12に直接に接触する。一方、くぼみ18は、空気を介して、検知面12から離間する。従って、指14と検知面12との間の熱伝導率は、くぼみ18のレベルよりも隆起部16のレベルの方が大きい。この結果、指紋は、電子チップ10により作図できる温度パターンに対応する。
【0037】
この目的のために、電子チップ10は、検知面12の全体に渡り、接した状態で互いに並んで配置された多数の検出画素Pijを備えている。1つの検出画素Pijは、温度変化を検出可能な最小の独立した表面である。検出された温度変化は、隣の画素が隆起部16に接触するか、くぼみ18に対向するかにより、1つの画素から隣の画素に変化する。各検出画素Pijは、この電子センサ8により取得された画像の1つの画素に対応している。そのため、これらは、「画素」とも呼ばれる。
【0038】
これらの画素Pijは、同一の基板20上に形成される。
【0039】
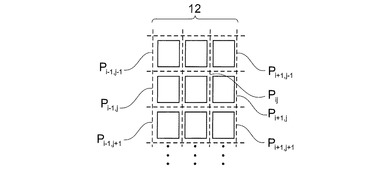
互いに並んでいる画素Pijの例示的な配置を、図3に示す。この例では、画素Pijは、画素の行列を形成する行および列として配置されている。例えば、電子チップ10は、それぞれが少なくとも300の画素からなる少なくとも50の行を備えている。
【0040】
各画素は、検知面12の1つの断片を規定する。検知面12のこれらの断片は、矩形であり、図3に示す点線で区切られる。各断片の表面は、面積が1mm2未満、好ましくは、0.5mm2未満、0.01mm2未満または0.005mm2未満である。各画素Pijにより規定される検知面12の断片は、50μm×50μmの正方形である。2つの隣接する画素の幾何学的中心間の距離は、1mm未満、好ましくは、0.5mm未満、0.1mm未満、0.01mm未満または0.001mm未満である。隣接する画素Pijの中心間の距離は、50μmである。
【0041】
各画素Pijは、
−温度変化を電位差に変換可能な変換器と、
−必要に応じて、この変換器に接触する対象を加熱可能な加熱抵抗とを備えている。
【0042】
電位差は、較正後に、この電位差が温度変化に直接変換されるという意味で、温度変化の「測定値」を表す。
【0043】
加熱抵抗は、米国特許第6091837号、または2010年5月6日出願のフランス国特許出願第1053554号に記載されているような動的検出方法の実行を可能とする。
【0044】
動的検出方法は、特に、画素の初期温度が温度パターンを生じさせる対象の温度に近いか、または同一であっても機能するという点を含め、いくつかの利点を有する。また、各画素の加熱抵抗により熱量を放散させる制御を行うことで、コントラストを調節することが可能である。
【0045】
各画素Pijは、これらの各画素Pijにより検出された温度変化の測定値を読み出す回路22に電気的に接続される。より正確には、回路22は、
− 読み出される1つ以上の画素Pijを選択し、
− 選択された1つの画素または複数の画素の加熱抵抗を制御し、
− 選択された1つの画素または複数の画素の変換器により測定された温度変化を読み出すことができる。
【0046】
通常、読み出す回路22は、画素Pijが形成される同じ硬い基板20に刻設され、および/または埋め込まれる。例えば、基板20は、シリコンまたはガラスからなっている。
【0047】
電子センサ8は、結線32により電子コンピュータ30に接続されている。例えば、この電子コンピュータ30は、電子チップ10を駆動するモジュール34と、処理モジュール36とを備えている。
【0048】
モジュール34は、検知画素の測定値に基づいて温度パターンを作図することが可能である。より正確には、このモジュール34は、画素の測定値と、これらの画素の互いに対する既知の位置との関数に従い、それぞれの画素により検出された隆起部およびくぼみの画像を構成することが可能である。
【0049】
ここで、処理モジュール36は、さらに、
− 電子センサ8により連続して取得された画像に基づき、回転角度およびこの回転中心の座標を決定し、
− 決定された回転角度および回転中心の座標の関数に従い、表示された対象を回転させるためにスクリーン4を制御することが可能である。
【0050】
補足すると、処理モジュール36は、この指紋を確認するため、取得された指紋の画像をデータベースに含まれる画像と比較することが可能であり、また、それに応じて、電子装置2の所定の動作を許可し、または、選択的に禁止する。
【0051】
通常、電子コンピュータ30は、情報記録媒体に記憶された命令を実行可能である少なくとも1つのプログラム可能な電子コンピュータとして実施される。この目的のために、電子コンピュータ30には、図4の方法を実行するために必要な命令、およびデータを含むメモリ38が接続されている。また、電子センサ8により取得された画像は、モジュール34によりメモリ38に記憶される。
【0052】
このようなセンサの実施形態および処理の他の詳細については、例えば、2010年5月6日出願のフランス国特許出願第1053554号を参考にすることができる。
【0053】
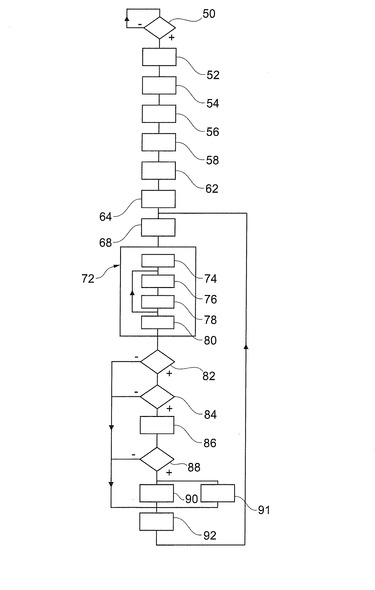
次に、電子装置2の処理方法につき、図4に示す方法に関して説明する。
【0054】
先ず、ステップ50では、電子コンピュータ30は、電子センサ8の検知面12に置かれた指の存在を一定の間隔で確認する。それに応じて、例えば、電子装置2のエネルギ消費を減少させるため、電子センサ8の画素Pijの一部分だけが使用される。さらに、この確認は、あまり頻繁には行われない。例えば、確認は、20〜25回/秒で行われる。
【0055】
検知面12が指を検出するまで、ステップ50の処理が繰り返される。
【0056】
変換を行う場合、電子センサ8を起動させるステップ52が実行される。
【0057】
次に、ステップ54では、電子センサ8は、時点t1において、指紋の第1画像を取得し、時間間隔ΔTが経過した後、時点t2において、指紋の第2画像を取得する。通常、時間間隔ΔTは、第1画像および第2画像が重畳するように十分に短い。例えば、時間間隔ΔTは、最小で1/800秒、好ましくは、既定値として1/800〜1/400秒である。モジュール34は、これらの画像をメモリ38に記憶する。
【0058】
次に、第1画像の関心領域を検索するステップ56が実行される。関心領域は、指が検知面12に接触する位置である。それに応じて、例えば、電子コンピュータ30は、信号を出力する画素を選択する。その後、関心領域の範囲を設定する選択された画素が使用される。これ以降、この関心領域の外側の画素は、以下に説明する計算には使用されない。選択される関心領域は、指14が検知面12に接触する1つの領域より大きくてもよい。一方、関心領域は、画素の数の点では、検知面12よりも小さい。
【0059】
ステップ58では、コンピュータは、第1画像と第2画像を比較することにより、回転中心の概略位置を求める。
【0060】
例えば、第1画像の関心領域の各画素は、第2画像が占有する同じ位置の画素から差し引かれる。このようにして、「差分」画像が得られる。画素同士の減算は、時点t1およびt2において、電子センサ8により測定された同じ画素Pijの値の差を計算することである。
【0061】
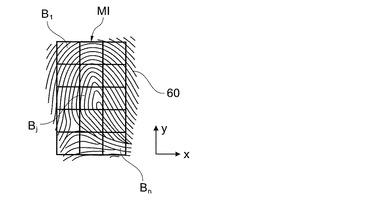
次に、この差分画像は、画素のブロックBjの行列MIを得るために分割される。ブロックBjは、互いに隣接し、重畳しない。この行列MIは、図5に示されている。図5では、関心領域は、行列MIの背景にある指紋60によって示されている。行列MIの各ブロックBjは、同じ数の画素を含んでいる。ここで、各ブロックは、8画素×8画素の正方形である。図5において、ブロックBjの大きさは、指紋と同じ縮尺ではない。
【0062】
次に、同一のブロックBjに属する全ての画素が、このブロックの平均値を求めるために加算される。差分画像の各画素に関連する値は、時点t1およびt2におけるこの画素の値の差である。この値は、このブロックの画素の平均値を得るため、同じブロックの他の画素と加算される。
【0063】
最後に、電子コンピュータ30は、平均値が最も小さいブロックBjの中央を見かけの回転中心として選択する。実際、回転中心に接近する指紋の移動量は、この回転中心から遠く離れたものよりもずっと小さい。従って、時点t1とt2との間で変化の最も小さい画素ブロックは、最も小さい平均値を有するブロックに対応する。
【0064】
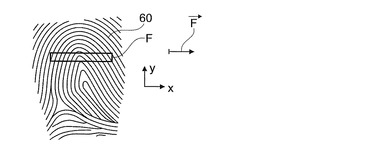
ステップ62では、電子コンピュータ30は、ステップ58で決定された回転中心の概略位置を中心としてウインドウF(図6参照)を配置する。このウインドウFは、長さが高さの少なくとも2倍、好ましくは、少なくとも10倍または20倍の矩形である。ここでは、例えば、ウインドウFは、192画素の長さと8画素だけの高さとで構成されている。
【0065】
このウインドウFに含まれる画素だけが、回転角度θおよび回転中心の座標Cの計算に使用される。この点において、実行される処理数は、関心領域の全ての画素がこの計算に使用される場合に比較して、相当に制限される。従って、電子コンピュータ30は、極めて高速でかつ多くのコンピュータ資源を必要とすることなく、前記方法を実行することができる。
【0066】
ウインドウFの、最大の長さは、F方向に延在している。F方向とは、F方向に隣接する2つの画素が、画像の記録されるメモリ38の連続するアドレスに配置される方向である。そのため、各画素のメモリアドレスの計算は不要となり、メモリのデータへのアクセスを容易にして計算は速くなる。これにより、データを連続的に十分簡単に読み出すことができる。ここで、F方向は、水平方向Xと平行である。
【0067】
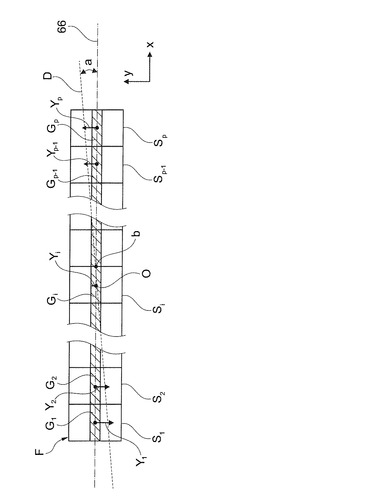
ステップ64では、ウインドウFは、X方向に互いに隣接するP個の矩形の区域Siに分割される。区域の数Pは、3つ以上、好ましくは、6、10または20以上である。数Pは、好ましくは、各区域SiのX方向の幅が8〜16画素となるように選択される。ここでは、12画素の各区域Siの幅に対応して、数Pは20である。添え字iは、ウインドウF内で区切られる区域の組の中から区域Siを特定する。
【0068】
ウインドウFおよび区域Siは、図7に拡大して詳細に示されている。ここで、全ての区域Siは、同一の水平の軸66に沿って配列されている。図7では、縦の波線が、ウインドウFの一部を省略していることを示している。
【0069】
ステップ68では、電子コンピュータ30は、第1画像の各区域Siから、全てのグループGiが、同一の水平軸、すなわち、ここでは、軸66に沿って配列される画素のグループGiを選択する。軸66は、X方向と平行であり、各区域Siの中間の高さのところを通過する。
【0070】
例えば、各グループGiは、第1画像における区域SiのY方向の中間の高さに配置されている12画素の2行に対応している。各グループGiは、軸66に沿った縦座標xiに関連付けられる。この目的のために、軸66は、縦座標xiを決定する原点O(図7)を備えている。各グループGiの縦座標xiは、そのグループGiのX方向の中心に対応している。
【0071】
ステップ72では、各グループGiに対して、電子コンピュータ30は、第1画像および第2画像を比較することにより、時点t1、t2間の縦の移動量yiを計算する。各移動量yiは、画像の面に含まれ、軸66に直交している。通常、移動量yiは、第1画像および第2画像における区域Siの画素間の相関を計算して得られる。
【0072】
ここで、例えば、電子コンピュータ30は、第2画像の区域SiにおけるグループGiの場所を調べる。そのため、処理74では、電子コンピュータ30は、画素のグループGiと同じ形状のマスクMiを設定する。例えば、この実施形態では、マスクMiは、それぞれが12画素からなる2つの水平の行に対応している。次いで、処理76では、電子コンピュータ30は、マスクMiをX方向にdi画素、Y方向にyi画素移動させた後、第2画像の区域SiにマスクMiを配置する。
【0073】
処理78では、電子コンピュータ30は、グループGiの対応する画素からマスクMiに含まれる各画素を減算する。グループの対応する画素は、マスクMiおよびグループGiの同じ位置を占める。画素Pmnからの画素Pijの減算は、時点t1において、電子センサ8の画素Pijにより測定された値と、時点t2において、電子センサ8の画素Pmnにより測定された値との差分計算である。
【0074】
処理76および78は、diおよびyiの全ての可能な値に対して繰り返される。通常、移動量diは、−6画素〜+5画素の間の全ての値をとることができる。移動量yiは、−3画素〜+4画素の間の全ての値をとることができる。ここで、移動量yiの原点は、軸66上にあるものとする。
【0075】
処理80では、電子コンピュータ30は、処理78で計算された最小の差分に対応する値diおよび値yiの組を選択する。実際、それは、第1画像のグループGiと最もよく関係付けられる第2画像のマスクMiにより選択された画素のグループである。
【0076】
ステップ72が終了すると、各グループGiの移動量diおよび移動量yiが得られる。
【0077】
ステップ82では、電子コンピュータ30は、検知面12上の指の動作が実際に回転であることを検証する。例えば、前のステップが終了することで得られた移動量diの平均値を計算する。次いで、この値が所定の閾値S1と比較される。この閾値S1を超える場合、電子コンピュータ30は、平行移動動作が回転動作よりも優位であると判断する。次に、ステップ68に戻る前に、第2画像を新たに取得し、既に取得されている第2画像を第1画像とする。
【0078】
回転動作が優位である場合、ステップ84で異常点を除去して処理を継続する。異常点を除去することにより、計算処理回数を増加させないで、計算精度を向上させることができる。
【0079】
ステップ84では、電子コンピュータ30は、各移動量yiを、所定の閾値S2と比較する。移動量yiがこの閾値S2よりも大きい場合、この移動量yiは、回転角度θおよび回転中心の座標Cの計算に考慮しない。例えば、閾値S2は、3画素に設定される。
【0080】
異常点を除去した後、回転角度θ、および回転中心の座標Cを計算するために、移動量yiが考慮されるN個のグループGiが残る。
【0081】
さらに、Nが2以下の場合、時間間隔ΔTを小さくする。次いで、新たな第2画像を取得するステップが実行され、前回の第2画像が第1画像となる。この場合、指の回転速度が速すぎ、従って、この問題を改善するために、画像を取得する周期を増加させる必要のある可能性が高い。
【0082】
Nが3以上の場合、ステップ86では、電子コンピュータ30は、回転角度θおよび回転中心の座標Cを計算する。そのため、電子コンピュータ30は、座標(xi,yi)の点を通る線形回帰直線D(図7)を計算する。そこで、以下の関係を最小化する係数aおよびbを計算する。
【0083】
【数1】
【0084】
− yiは、画素のグループGiの縦の移動量。
− xiは、グループGiの縦座標。
− ||…||は、移動量yiとaxi+bとの差分を表す絶対値を与えるノルム。
【0085】
ステップ86では、異常点は、考慮されない。換言すれば、移動量yiが閾値S2を超えるグループGiは、係数aおよびbの計算に考慮されない。異常点が除去された場合、グループGiの数Nは、最初に選択された区域SiまたはグループGiの数Pよりも小さい。なお、数Nは、常に3以上である。
【0086】
ここで、例えば、係数aおよびbは、最小自乗法を使用して計算される。従って、これらは、以下の関係を最小化するものとして計算される。
【0087】
【数2】
【0088】
次いで、回転角度θは、傾きaの逆正接により与えられる。通常、傾きaが小さければ、一次近似として、回転角度θは、傾きaと等しく、従って、簡単に計算することができる。
【0089】
係数bは、原点の縦座標であり、軸66に沿った回転中心の位置を表す。この位置は、第1画像の軸66の既知の位置に基づく他の基準座標系で表される座標Cに変換することができる。
【0090】
また、ステップ86では、電子コンピュータ30は、点(xi,yi)と直線Dとの間の近似を表す精度指標Iを計算する。この精度指標Iは、線形相関係数、標準偏差、分散等とすることができる。ここで、この精度指標Iを標準偏差と仮定する。
【0091】
ステップ88では、精度指標Iは、所定の閾値S3と比較される。精度指標Iが閾値S3以下であれば、点(xi,yi)と直線Dとの偏差が小さく、その結果が保持されることを示す。逆の場合には、ステップ86で計算された回転角度θ、および座標Cが削除され、第2画像と置き換えるための新たな画像が直ちに取得される。
【0092】
ステップ90では、コンピュータは、予め計算された回転角度θの値の関数として、継続時間の時間間隔ΔTを自動的に調節する。
【0093】
例えば、回転角度θの値が所定の閾値S4以下の場合、2つの画像間の回転は、非常に小さい。この場合、ノイズが増加し、従って、計算された回転角度θの値の精度が悪くなる。この欠点を改善するため、継続時間の時間間隔ΔTが増加される。
【0094】
継続時間の時間間隔ΔTは、電子センサ8による画像取得の頻度を変更せずに取得された画像をスキップするか、または、逆に、電子センサ8による画像取得の頻度を少なくすることで、増加させることができる。
【0095】
ここで、継続時間の時間間隔ΔTは、計算された回転角度θを0.5〜10°、好ましくは、0.5〜5°または1〜3°の範囲に維持するため、各回転角度θが計算された後、増減させるか、または、一定に保持される。
【0096】
ステップ90と並行して、ステップ91では、処理モジュール36は、回転角度θと、必要に応じて、ステップ86で計算された回転中心の座標Cとの関数により表示を変更するように、スクリーン4を制御する。この場合、スクリーン4の表示は、スクリーン4に表示された写真のような対象を、中心の座標Cの回りに回転角度θだけ回転させるように変更される。通常、このステップでは、表示された対象は、スクリーン4の面に垂直な軸の回りに回転する。
【0097】
次いで、ステップ92では、電子センサ8は、画像を最後に取得してから、時間間隔ΔTが経過した後、新たな画像を取得する。新たに取得された画像は、新たな第2画像となり、前回の第2画像は、第1画像となる。その後、ステップ68〜92が繰り返される。例えば、ステップ92では、ウインドウFに含まれる画素のみが電子センサ8により取得される。このことは、取得される画素数を制限し、従って、電子センサ8の電力消費を抑制する。
【0098】
図4の処理は、例えば、指が検知面12から離れると、終了する。
【0099】
他の種々の実施形態が可能である。例えば、パターンの画像を取得するために、容量または抵抗の測定に基づく技術を使用することができる。また、光学的またはその他の技術を含めることができる。電子センサ8の分解能は、一般には、250dpiまたは380dpiよりも大きく、好ましくは、500dpiよりも大きい。
【0100】
変形例として、パターンの画像のスクリーンと電子センサとは、同一である。従って、回転角度θおよび中心の座標Cは、スクリーンの表面において、通常、指でパターンを回転させることにより取得される。これは、特に、回転中心のX方向およびY方向の位置を指示するための極めて人間工学的な実施形態を構成する。事実、指は、回転させたい回転中心を自然に指し示す。
【0101】
ウインドウFは、水平、垂直、または、これら以外の方向とすることができる。
【0102】
変形例として、複数のウインドウFを同時に使用することができる。例えば、回転中心の概略推定位置を中心とする垂直ウインドウおよび水平ウインドウが使用される。この場合、上述した方法は、垂直ウインドウに対して一度実行され、次いで、2度目に水平ウインドウに対して実行される。
【0103】
ウインドウFは、この方法を実施するために、回転中心を中心とする必要はない。実際、画像におけるウインドウの位置がどこであっても、上述した方法では、回転角度θおよび回転中心の座標Cを決定することができる。なお、ウインドウの最も長い軸が回転中心を通り、または、少なくとも回転中心に近接することが好ましい。
【0104】
検知面12が比較的小さい場合、ウインドウFは、検知面12の大きさに等しく設定してもよい。これにより、アルゴリズムおよび計算が簡単になる。この場合、一般的には、センサが指に対して小さいため、回転角度だけが供給され、回転中心を指定することは困難である。
【0105】
グループGi、従って、区域Siは、重なってもよい。この場合、軸66に沿って隣接する2つのグループGiは、共通の画素を有する。反対に、グループGiおよび区域Siは、どのグループGiにも属さない画素により互いに分離されてもよい。この場合、軸66に沿って隣接する2つのグループGiの画素は、どのグループGiにも属さない画素により互いに分離される。これにより、特に、画素の数を増加させることなく、従って、回転角度θおよび回転中心の座標Cの計算を実行する処理回数を増加させることなく、ウインドウFの長さを増加させることが可能となる。
【0106】
グループGiは、異なる形状であってもよい。例えば、他の実施形態では、各グループGiは、F方向に平行な画素の行であり、その幅は、区域Siの幅と等しい。
【0107】
他の方法として、パターンの回転中心を粗く設定して実行してもよい。例えば、回転中心は、最小の平均値を有する画素のブロックの重心を採ることにより、粗く推定してもよい。この重心は、その平均値により画素ブロックの位置に重み付けをして計算してもよい。
【0108】
関心領域の選択は、省略してもよい。これは、例えば、電子センサ8の検知駆動面が小さく、この面の全ての画素が主要な計算能力を要求されることなく使用できる場合である。
【0109】
上述した方法の実施形態では、移動量diは、回転角度θまたは回転中心の座標Cの計算に使用されない。変形例として、これらの移動量diは、回転中心の座標Cの計算に使用される。
【0110】
線形回帰直線の係数aおよびbは、他のノルムまたは最小自乗法以外の方法を使用して計算してもよい。
【0111】
他の実施形態では、回転角度θを求めるため、傾きaの逆正接、または、少なくとも傾きaの逆正接の有限展開が計算される。この計算は、傾きaが所定の閾値を超えるときにのみ、必要に応じて実行される。この閾値以下である場合、回転角度θは、傾きaに設定される。
【0112】
区域Siの大きさは、全て同一である必要はない。例えば、ウインドウFの左右端に近接する区域Siの高さは、回転中心に近い区域Siの高さより高くてもよい。実際、ウインドウの端部に近い区域Siに含まれるグループGiの移動量yiは、恐らく、回転中心に近い区域Siに含まれるグループGiの移動量yiよりも大きい。
【0113】
上述した方法では、回転が検出されるパターンが指に形成された指紋である特別な場合について説明した。しかし、この方法は、電子センサ8により検出することができ、他の素材に形成される他のパターンの回転に基づいて、回転角度および回転中心の座標を計算することができる。例えば、パターンは、布や革のような素材に形成されるものでもよい。この素材は、例えば、ユーザが装着する手袋でもよい。事実、上述した方法は、取得された画像が、指紋や、布、革等の他の素材の構造のように、回転対称ではない任意のパターンに適用される。従って、変形例としては、ユーザの指を、このパターンを有する他の対象に置き換えることが可能である。例えば、パターンは、ユーザが操作するタッチペンの端部に形成されるものでもよい。
【0114】
また、上述した方法は、光学式マウスの目的として、回転角度、および回転中心の座標を取得するために適用される。この場合、光学式マウスは、それが移動する面に垂直な軸の回りに回転する。この光学式マウスは、同じパターンの第1画像および第2画像を取得する。そして、上述した方法は、これらの画像に基づき、回転角度および回転中心の座標を決定するために実行される。この場合、パターンは、例えば、マウスマットの一部またはテーブルの上面である。これらのパターンは、指紋のように、いかなる回転対称性も有しない画像を取得可能な濃淡の線または点を表す。後者の実施形態では、パターンよりも、むしろ回転される電子センサである。しかし、ここで説明した方法には、変わりはない。
【符号の説明】
【0115】
2 電子装置
4 スクリーン
6 接触型マンマシンインタフェース
8 電子センサ
10 電子チップ
12 検知面
14 指
16 隆起部
18 くぼみ
20 基板
22 回路
30 電子コンピュータ
32 結線
34 モジュール
36 処理モジュール
38 メモリ
60 指紋
66 軸
【技術分野】
【0001】
本発明は、回転角度および回転中心座標の決定方法に関する。また、本発明の主題は、スクリーン制御方法、およびこの方法を実行するための情報記録媒体に関する。さらに、本発明は、スクリーンを備え、この制御方法を実行することができる装置にも関する。
【背景技術】
【0002】
回転角度および回転中心座標を決定する公知の方法は、
− 画像面に垂直な軸の回りにパターンを回転させる前に、電子センサにより、前記パターンの第1画像を取得し、
− 前記電子センサに対して、人により前記画像面に垂直な軸の回りに、前記パターンを回転させ、
− 前記パターンの回転後、前記電子センサにより同じパターンの第2画像を取得し、画素により構成される前記第1画像および第2画像を電子メモリに記憶させ、
− 画素のグループGiが同じ配列軸に沿って配列され、前記各グループGiが、この軸に沿った各縦座標xiに関連付けられ、添え字iによりN個の画素の前記グループGiの中から前記グループGiが特定される、N個の異なる画素の前記グループGiを、電子コンピュータにより前記第1画像から選択し、
− 移動量yiは、前記グループGiに属する前記第1画像の画素と、第2画像の画素との相関の計算から得られる移動量であり、前記各グループGiに対して、前記電子コンピュータにより、前記第1画像と第2画像とを比較し、前記配列軸に垂直な方向に対する前記第1画像と第2画像との間のグループGiの移動量yiを計算するようになっている。
【0003】
例えば、このような方法は、米国特許出願公開第2005/0012714号明細書(特許文献1)に開示されている。この方法は、極めて簡単であり、実行するために、限られたコンピュータの能力しか必要としない。そのため、携帯端末や携帯電話として知られている携帯電子機器のように、コンピュータ資源が限られている電子機器により実行することができる。
【0004】
しかしながら、この方法では、決定される回転角度の精度はあまり良くない。実際、回転角度は、回転中心に対してのみ正確に計算可能である。特許文献1では、回転中心の位置を正確に決定する方法については、開示されていない。より正確には、この特許文献では、回転中心の位置は、2つのウインドウの交点、すなわち、電子センサの実質上の中央に仮定されている。従って、このような仮定は、回転中心の実際の位置を正確に示していない。回転中心の位置を正確に決定していないため、計算された回転角度もまた、あまり正確ではない。
【0005】
一般的に、回転中心の位置を正確に決定することは、困難である。当然のことであるが、回転中心に近いパターンの移動の幅は、小さく、従って、S/N比はあまり良くない。そのため、回転角度および回転中心座標を取得するための他の方法が考えられていた。例えば、特許文献2(米国特許出願公開第2001/0036299号)を参照することができる。しかしながら、この方法は、取得した画像に対して、かなりの計算能力が要求される複雑な計算が必要である。従って、かなりのコンピュータ資源を有する機器でなければ、実行することができない。
【0006】
また、先行技術としては、以下のものが知られている。
特許文献3(米国特許第5563403号明細書)
特許文献4(米国特許第4558461号明細書)
特許文献5(特開平10-027246号公報)
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国特許出願公開第2005/0012714号明細書
【特許文献2】米国特許出願公開第2001/0036299号明細書
【特許文献3】米国特許第5563403号明細書
【特許文献4】米国特許第4558461号明細書
【特許文献5】特開平10-027246号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、上記の欠点を改善し、回転角度および回転中心座標を、正確かつ簡単に取得することができ、限られた計算能力を有する機器により実行することのできる方法を提供することを目的としている。
【課題を解決するための手段】
【0009】
従って、この発明の主題は、請求項1に係る方法である。
【0010】
上記の方法は、画素のグループGiが回転前に配列軸Mに沿って配列されているとすると、回転後、軸Mに対して角度aとなる軸M′に沿って配列される、という仮定に基づいている。角度aは、回転角度である。さらに、軸Mと軸M′との交点は、回転中心に対応する。実際、単純な回転は、グループGiの配列を変更しない。その結果、線形回帰により計算された係数aおよびbから、軸M′の式を求めることができ、従って、回転角度および回転中心の座標を求めることができる。係数aおよびbを線形回帰により計算できるため、疑似現象を考慮した最良の方法で補正することができる。なお、疑似現象とは、パターンが生成される素材の弾性変形による回転後のグループGiの調整不良、回転と同時のパターンの移動等である。
【0011】
上記の方法では、移動量yiが、グループGiに属する前記第1画像の画素と前記第2画像の画素との相関から計算されるため、グループGiの画素が表しているものについての特別な知識は必要ない。従って、記載された方法は、回転対称ではない任意のパターンに適用される。
【0012】
上記の方法は、回転角度及び回転中心の座標を、米国特許出願公開第2005/0012714号に記載されている方法よりも、はるかに正確に決定することを可能とする。例えば、上記の方法は、回転中心の位置に関して、いかなる仮定も必要としない。また、米国特許出願公開第2005/0012714号の場合のように、回転中心の縦座標を2つの画素のグループGi間の境界とする必要もない。
【0013】
さらに、上記の方法は、同一の軸に沿って配列されているN個の画素のグループGiだけを使用する。従って、画像の全ての画素を使用して計算する必要がない。このことは、実行される処理回数を制限し、従って、この方法を実施するために必要な計算能力は減少する。
【0014】
また、係数aおよびbが線形回帰により計算されるため、計算が簡単となり、また、この方法を実施するために必要な計算能力が抑制される。
【0015】
従って、上記の方法は、実行速度が速く、適切な時間で実行するための相当な計算能力を必要としない。
【0016】
この方法の実施形態は、従属する請求項の1つ以上の特徴を備えることができる。
【0017】
さらに、この方法の実施形態は、以下の利点を有する。
− 回転角度および回転中心を計算するため、1つのウインドウの画素だけを使用することにより、実行の処理回数を減少させることを可能とする。従って、この方法を実行するために必要な計算能力を減少させることを可能とする。
− このウインドウに含まれる画素だけを取得することにより、処理速度を速くすることを可能とし、また、電子センサの電力消費を少なくすることを可能とする。
− また、ウインドウをN個の区域Siに分割することにより、回転角度および回転中心の座標を計算するために実行される処理回数を減少させることを可能とする。
− 移動量yiが所定の閾値を超えた場合、移動量yiおよび縦座標xiを考慮しないことにより、異常点を除去し、従って、実行される処理回数を増加させることなく、計算精度を向上させることを可能とする。
− 計算された角度を0.5〜10°の範囲に維持するため、前回計算された角度の関数として、前記第1画像および前記第2画像を取得する時間間隔を調節することにより、これらの回転角度の値に対して、前記第1画像および前記第2画像が移動量yiを正確に計算するのに十分に重なるため、前記方法の精度を向上させることを可能とする。
【0018】
また、本発明の主題は、
− 電子コンピュータにより、取得した回転角度および回転中心の座標の関数として、スクリーンに表示された対象を回転させるため、前記スクリーンを制御し、
− 上記の方法を実行することにより、前記回転角度を取得する、
表示スクリーン制御方法である。
【0019】
また、本発明の主題は、電子コンピュータにより命令が実行されるときに、上記の方法を実行するための前記命令を備える情報記録媒体である。
【0020】
また、本発明の主題は、請求項9に係る装置である。
【0021】
この装置の実施形態は、次の特徴を備えることができる。すなわち、前記電子センサを、指紋センサまたは光学式マウスとする。
【図面の簡単な説明】
【0022】
本発明は、以下の制限されることのない例、および図面を参照することのより、一層良く理解することができると思う。
【0023】
【図1】回転角度および回転中心座標を取得できる装置の概略図である。
【図2】図1の装置に使用される電子センサの概略図である。
【図3】図2の電子センサの検知面における画素配置の部分概略図である。
【図4】回転角度および回転中心座標の取得方法のフローチャートである。
【図5】図4の方法を実行するために実施される処理の概略図である。
【図6】図4の方法を実行するために実施される処理の概略図である。
【図7】複数の区域に分割され、図4の方法で使用される画素ウインドウの概略図である。
【0024】
これらの図において、同一の符号は、同一の構成要素を示している。
【0025】
以下の説明において、当業者に周知の特徴および機能については、詳細に説明しない。
【発明を実施するための形態】
【0026】
図1は、回転角度および回転中心座標を取得することのできる電子装置2を示す。この目的のために、電子装置2は、例として、スクリーン4と、接触型マンマシンインタフェース6とを備えている。接触型マンマシンインタフェース6は、例えば、スクリーン4に表示された対象を移動させるために使用される。ここでの説明では、特に、スクリーン4に表示された対象の回転移動を扱う。スクリーン4に表示された対象を回転移動させるため、接触型マンマシンインタフェース6を介して、回転角度θおよび回転中心の座標Cを予め取得する必要がある。
【0027】
そのため、この実施形態では、ユーザは、接触型マンマシンインタフェース6の所望の回転中心の位置に指を置き、次いで、所望の回転角度θを指示するため、接触型マンマシンインタフェース6の表面に垂直な軸の回りに指を回転させる。この実施形態では、この操作は、ユーザが特にX方向の回転中心の位置を指示することを可能にする。
【0028】
ユーザの指は、パターンの回転角度θを検出できる回転対称ではないパターンを有する。このパターンは、ユーザ、すなわち、人により直接移動される。指の場合、このパターンは、「指紋」と称される。指紋は、隆起部により互いに分離された谷またはくぼみを備えている。
【0029】
接触型マンマシンインタフェース6は、くぼみと隆起部とを識別する十分に良好な解像度で、指紋の画像を取得することが可能である。
【0030】
取得した画像は、X方向に平行な水平の行と、Y方向に平行な列とに整列された画素の行列により構成されている。くぼみと隆起部とを識別できるように、画素のX方向またはY方向の最大幅は、250μmよりも小さく、好ましくは、100μmまたは75μmよりも小さい。この最大幅は、50μm以下であると有利である。ここでは、約500dpi(ドット/インチ=ドット/25,4mm)の解像度に対応するように、画素は、50μm×50μmの正方形である。
【0031】
図2は、電子装置2のさらに詳細な1つの態様を示し、特に、接触型マンマシンインタフェース6の特定の実施形態を示す。この実施形態では、接触型マンマシンインタフェース6は、温度パターンを検出可能な電子センサ8に基づいて実施される。
【0032】
温度パターンは、電子センサ8の電子チップ10に基づいて識別可能な対象の温度特性の非同次空間分布である。一般的に、このような温度パターンは、対象によって生成される。この実施形態では、指紋は、電子センサ8により検出可能な温度パターンである。
【0033】
「温度特性」という表現は、熱容量および熱伝導率の関数である対象の特性を意味する。
【0034】
以下において、電子センサ8は、指紋の検出に特に適する特定の場合のものとして説明する。この特定の場合において、電子センサ8は、指紋センサとして良く知られている。
【0035】
電子チップ10は、作図される温度パターンを有する対象が接触する検知面12を備えている。この対象は、表皮が検知面12に直接置かれる指14である。指14の表皮にある指紋は、くぼみ18により分離された隆起部16の存在によって明らかにされる。図2では、隆起部16を描写してくぼみ18が視認できるように、指14が数倍に拡大されている。
【0036】
指14を検知面12に置くと、隆起部16だけが、検知面12に直接に接触する。一方、くぼみ18は、空気を介して、検知面12から離間する。従って、指14と検知面12との間の熱伝導率は、くぼみ18のレベルよりも隆起部16のレベルの方が大きい。この結果、指紋は、電子チップ10により作図できる温度パターンに対応する。
【0037】
この目的のために、電子チップ10は、検知面12の全体に渡り、接した状態で互いに並んで配置された多数の検出画素Pijを備えている。1つの検出画素Pijは、温度変化を検出可能な最小の独立した表面である。検出された温度変化は、隣の画素が隆起部16に接触するか、くぼみ18に対向するかにより、1つの画素から隣の画素に変化する。各検出画素Pijは、この電子センサ8により取得された画像の1つの画素に対応している。そのため、これらは、「画素」とも呼ばれる。
【0038】
これらの画素Pijは、同一の基板20上に形成される。
【0039】
互いに並んでいる画素Pijの例示的な配置を、図3に示す。この例では、画素Pijは、画素の行列を形成する行および列として配置されている。例えば、電子チップ10は、それぞれが少なくとも300の画素からなる少なくとも50の行を備えている。
【0040】
各画素は、検知面12の1つの断片を規定する。検知面12のこれらの断片は、矩形であり、図3に示す点線で区切られる。各断片の表面は、面積が1mm2未満、好ましくは、0.5mm2未満、0.01mm2未満または0.005mm2未満である。各画素Pijにより規定される検知面12の断片は、50μm×50μmの正方形である。2つの隣接する画素の幾何学的中心間の距離は、1mm未満、好ましくは、0.5mm未満、0.1mm未満、0.01mm未満または0.001mm未満である。隣接する画素Pijの中心間の距離は、50μmである。
【0041】
各画素Pijは、
−温度変化を電位差に変換可能な変換器と、
−必要に応じて、この変換器に接触する対象を加熱可能な加熱抵抗とを備えている。
【0042】
電位差は、較正後に、この電位差が温度変化に直接変換されるという意味で、温度変化の「測定値」を表す。
【0043】
加熱抵抗は、米国特許第6091837号、または2010年5月6日出願のフランス国特許出願第1053554号に記載されているような動的検出方法の実行を可能とする。
【0044】
動的検出方法は、特に、画素の初期温度が温度パターンを生じさせる対象の温度に近いか、または同一であっても機能するという点を含め、いくつかの利点を有する。また、各画素の加熱抵抗により熱量を放散させる制御を行うことで、コントラストを調節することが可能である。
【0045】
各画素Pijは、これらの各画素Pijにより検出された温度変化の測定値を読み出す回路22に電気的に接続される。より正確には、回路22は、
− 読み出される1つ以上の画素Pijを選択し、
− 選択された1つの画素または複数の画素の加熱抵抗を制御し、
− 選択された1つの画素または複数の画素の変換器により測定された温度変化を読み出すことができる。
【0046】
通常、読み出す回路22は、画素Pijが形成される同じ硬い基板20に刻設され、および/または埋め込まれる。例えば、基板20は、シリコンまたはガラスからなっている。
【0047】
電子センサ8は、結線32により電子コンピュータ30に接続されている。例えば、この電子コンピュータ30は、電子チップ10を駆動するモジュール34と、処理モジュール36とを備えている。
【0048】
モジュール34は、検知画素の測定値に基づいて温度パターンを作図することが可能である。より正確には、このモジュール34は、画素の測定値と、これらの画素の互いに対する既知の位置との関数に従い、それぞれの画素により検出された隆起部およびくぼみの画像を構成することが可能である。
【0049】
ここで、処理モジュール36は、さらに、
− 電子センサ8により連続して取得された画像に基づき、回転角度およびこの回転中心の座標を決定し、
− 決定された回転角度および回転中心の座標の関数に従い、表示された対象を回転させるためにスクリーン4を制御することが可能である。
【0050】
補足すると、処理モジュール36は、この指紋を確認するため、取得された指紋の画像をデータベースに含まれる画像と比較することが可能であり、また、それに応じて、電子装置2の所定の動作を許可し、または、選択的に禁止する。
【0051】
通常、電子コンピュータ30は、情報記録媒体に記憶された命令を実行可能である少なくとも1つのプログラム可能な電子コンピュータとして実施される。この目的のために、電子コンピュータ30には、図4の方法を実行するために必要な命令、およびデータを含むメモリ38が接続されている。また、電子センサ8により取得された画像は、モジュール34によりメモリ38に記憶される。
【0052】
このようなセンサの実施形態および処理の他の詳細については、例えば、2010年5月6日出願のフランス国特許出願第1053554号を参考にすることができる。
【0053】
次に、電子装置2の処理方法につき、図4に示す方法に関して説明する。
【0054】
先ず、ステップ50では、電子コンピュータ30は、電子センサ8の検知面12に置かれた指の存在を一定の間隔で確認する。それに応じて、例えば、電子装置2のエネルギ消費を減少させるため、電子センサ8の画素Pijの一部分だけが使用される。さらに、この確認は、あまり頻繁には行われない。例えば、確認は、20〜25回/秒で行われる。
【0055】
検知面12が指を検出するまで、ステップ50の処理が繰り返される。
【0056】
変換を行う場合、電子センサ8を起動させるステップ52が実行される。
【0057】
次に、ステップ54では、電子センサ8は、時点t1において、指紋の第1画像を取得し、時間間隔ΔTが経過した後、時点t2において、指紋の第2画像を取得する。通常、時間間隔ΔTは、第1画像および第2画像が重畳するように十分に短い。例えば、時間間隔ΔTは、最小で1/800秒、好ましくは、既定値として1/800〜1/400秒である。モジュール34は、これらの画像をメモリ38に記憶する。
【0058】
次に、第1画像の関心領域を検索するステップ56が実行される。関心領域は、指が検知面12に接触する位置である。それに応じて、例えば、電子コンピュータ30は、信号を出力する画素を選択する。その後、関心領域の範囲を設定する選択された画素が使用される。これ以降、この関心領域の外側の画素は、以下に説明する計算には使用されない。選択される関心領域は、指14が検知面12に接触する1つの領域より大きくてもよい。一方、関心領域は、画素の数の点では、検知面12よりも小さい。
【0059】
ステップ58では、コンピュータは、第1画像と第2画像を比較することにより、回転中心の概略位置を求める。
【0060】
例えば、第1画像の関心領域の各画素は、第2画像が占有する同じ位置の画素から差し引かれる。このようにして、「差分」画像が得られる。画素同士の減算は、時点t1およびt2において、電子センサ8により測定された同じ画素Pijの値の差を計算することである。
【0061】
次に、この差分画像は、画素のブロックBjの行列MIを得るために分割される。ブロックBjは、互いに隣接し、重畳しない。この行列MIは、図5に示されている。図5では、関心領域は、行列MIの背景にある指紋60によって示されている。行列MIの各ブロックBjは、同じ数の画素を含んでいる。ここで、各ブロックは、8画素×8画素の正方形である。図5において、ブロックBjの大きさは、指紋と同じ縮尺ではない。
【0062】
次に、同一のブロックBjに属する全ての画素が、このブロックの平均値を求めるために加算される。差分画像の各画素に関連する値は、時点t1およびt2におけるこの画素の値の差である。この値は、このブロックの画素の平均値を得るため、同じブロックの他の画素と加算される。
【0063】
最後に、電子コンピュータ30は、平均値が最も小さいブロックBjの中央を見かけの回転中心として選択する。実際、回転中心に接近する指紋の移動量は、この回転中心から遠く離れたものよりもずっと小さい。従って、時点t1とt2との間で変化の最も小さい画素ブロックは、最も小さい平均値を有するブロックに対応する。
【0064】
ステップ62では、電子コンピュータ30は、ステップ58で決定された回転中心の概略位置を中心としてウインドウF(図6参照)を配置する。このウインドウFは、長さが高さの少なくとも2倍、好ましくは、少なくとも10倍または20倍の矩形である。ここでは、例えば、ウインドウFは、192画素の長さと8画素だけの高さとで構成されている。
【0065】
このウインドウFに含まれる画素だけが、回転角度θおよび回転中心の座標Cの計算に使用される。この点において、実行される処理数は、関心領域の全ての画素がこの計算に使用される場合に比較して、相当に制限される。従って、電子コンピュータ30は、極めて高速でかつ多くのコンピュータ資源を必要とすることなく、前記方法を実行することができる。
【0066】
ウインドウFの、最大の長さは、F方向に延在している。F方向とは、F方向に隣接する2つの画素が、画像の記録されるメモリ38の連続するアドレスに配置される方向である。そのため、各画素のメモリアドレスの計算は不要となり、メモリのデータへのアクセスを容易にして計算は速くなる。これにより、データを連続的に十分簡単に読み出すことができる。ここで、F方向は、水平方向Xと平行である。
【0067】
ステップ64では、ウインドウFは、X方向に互いに隣接するP個の矩形の区域Siに分割される。区域の数Pは、3つ以上、好ましくは、6、10または20以上である。数Pは、好ましくは、各区域SiのX方向の幅が8〜16画素となるように選択される。ここでは、12画素の各区域Siの幅に対応して、数Pは20である。添え字iは、ウインドウF内で区切られる区域の組の中から区域Siを特定する。
【0068】
ウインドウFおよび区域Siは、図7に拡大して詳細に示されている。ここで、全ての区域Siは、同一の水平の軸66に沿って配列されている。図7では、縦の波線が、ウインドウFの一部を省略していることを示している。
【0069】
ステップ68では、電子コンピュータ30は、第1画像の各区域Siから、全てのグループGiが、同一の水平軸、すなわち、ここでは、軸66に沿って配列される画素のグループGiを選択する。軸66は、X方向と平行であり、各区域Siの中間の高さのところを通過する。
【0070】
例えば、各グループGiは、第1画像における区域SiのY方向の中間の高さに配置されている12画素の2行に対応している。各グループGiは、軸66に沿った縦座標xiに関連付けられる。この目的のために、軸66は、縦座標xiを決定する原点O(図7)を備えている。各グループGiの縦座標xiは、そのグループGiのX方向の中心に対応している。
【0071】
ステップ72では、各グループGiに対して、電子コンピュータ30は、第1画像および第2画像を比較することにより、時点t1、t2間の縦の移動量yiを計算する。各移動量yiは、画像の面に含まれ、軸66に直交している。通常、移動量yiは、第1画像および第2画像における区域Siの画素間の相関を計算して得られる。
【0072】
ここで、例えば、電子コンピュータ30は、第2画像の区域SiにおけるグループGiの場所を調べる。そのため、処理74では、電子コンピュータ30は、画素のグループGiと同じ形状のマスクMiを設定する。例えば、この実施形態では、マスクMiは、それぞれが12画素からなる2つの水平の行に対応している。次いで、処理76では、電子コンピュータ30は、マスクMiをX方向にdi画素、Y方向にyi画素移動させた後、第2画像の区域SiにマスクMiを配置する。
【0073】
処理78では、電子コンピュータ30は、グループGiの対応する画素からマスクMiに含まれる各画素を減算する。グループの対応する画素は、マスクMiおよびグループGiの同じ位置を占める。画素Pmnからの画素Pijの減算は、時点t1において、電子センサ8の画素Pijにより測定された値と、時点t2において、電子センサ8の画素Pmnにより測定された値との差分計算である。
【0074】
処理76および78は、diおよびyiの全ての可能な値に対して繰り返される。通常、移動量diは、−6画素〜+5画素の間の全ての値をとることができる。移動量yiは、−3画素〜+4画素の間の全ての値をとることができる。ここで、移動量yiの原点は、軸66上にあるものとする。
【0075】
処理80では、電子コンピュータ30は、処理78で計算された最小の差分に対応する値diおよび値yiの組を選択する。実際、それは、第1画像のグループGiと最もよく関係付けられる第2画像のマスクMiにより選択された画素のグループである。
【0076】
ステップ72が終了すると、各グループGiの移動量diおよび移動量yiが得られる。
【0077】
ステップ82では、電子コンピュータ30は、検知面12上の指の動作が実際に回転であることを検証する。例えば、前のステップが終了することで得られた移動量diの平均値を計算する。次いで、この値が所定の閾値S1と比較される。この閾値S1を超える場合、電子コンピュータ30は、平行移動動作が回転動作よりも優位であると判断する。次に、ステップ68に戻る前に、第2画像を新たに取得し、既に取得されている第2画像を第1画像とする。
【0078】
回転動作が優位である場合、ステップ84で異常点を除去して処理を継続する。異常点を除去することにより、計算処理回数を増加させないで、計算精度を向上させることができる。
【0079】
ステップ84では、電子コンピュータ30は、各移動量yiを、所定の閾値S2と比較する。移動量yiがこの閾値S2よりも大きい場合、この移動量yiは、回転角度θおよび回転中心の座標Cの計算に考慮しない。例えば、閾値S2は、3画素に設定される。
【0080】
異常点を除去した後、回転角度θ、および回転中心の座標Cを計算するために、移動量yiが考慮されるN個のグループGiが残る。
【0081】
さらに、Nが2以下の場合、時間間隔ΔTを小さくする。次いで、新たな第2画像を取得するステップが実行され、前回の第2画像が第1画像となる。この場合、指の回転速度が速すぎ、従って、この問題を改善するために、画像を取得する周期を増加させる必要のある可能性が高い。
【0082】
Nが3以上の場合、ステップ86では、電子コンピュータ30は、回転角度θおよび回転中心の座標Cを計算する。そのため、電子コンピュータ30は、座標(xi,yi)の点を通る線形回帰直線D(図7)を計算する。そこで、以下の関係を最小化する係数aおよびbを計算する。
【0083】
【数1】
【0084】
− yiは、画素のグループGiの縦の移動量。
− xiは、グループGiの縦座標。
− ||…||は、移動量yiとaxi+bとの差分を表す絶対値を与えるノルム。
【0085】
ステップ86では、異常点は、考慮されない。換言すれば、移動量yiが閾値S2を超えるグループGiは、係数aおよびbの計算に考慮されない。異常点が除去された場合、グループGiの数Nは、最初に選択された区域SiまたはグループGiの数Pよりも小さい。なお、数Nは、常に3以上である。
【0086】
ここで、例えば、係数aおよびbは、最小自乗法を使用して計算される。従って、これらは、以下の関係を最小化するものとして計算される。
【0087】
【数2】
【0088】
次いで、回転角度θは、傾きaの逆正接により与えられる。通常、傾きaが小さければ、一次近似として、回転角度θは、傾きaと等しく、従って、簡単に計算することができる。
【0089】
係数bは、原点の縦座標であり、軸66に沿った回転中心の位置を表す。この位置は、第1画像の軸66の既知の位置に基づく他の基準座標系で表される座標Cに変換することができる。
【0090】
また、ステップ86では、電子コンピュータ30は、点(xi,yi)と直線Dとの間の近似を表す精度指標Iを計算する。この精度指標Iは、線形相関係数、標準偏差、分散等とすることができる。ここで、この精度指標Iを標準偏差と仮定する。
【0091】
ステップ88では、精度指標Iは、所定の閾値S3と比較される。精度指標Iが閾値S3以下であれば、点(xi,yi)と直線Dとの偏差が小さく、その結果が保持されることを示す。逆の場合には、ステップ86で計算された回転角度θ、および座標Cが削除され、第2画像と置き換えるための新たな画像が直ちに取得される。
【0092】
ステップ90では、コンピュータは、予め計算された回転角度θの値の関数として、継続時間の時間間隔ΔTを自動的に調節する。
【0093】
例えば、回転角度θの値が所定の閾値S4以下の場合、2つの画像間の回転は、非常に小さい。この場合、ノイズが増加し、従って、計算された回転角度θの値の精度が悪くなる。この欠点を改善するため、継続時間の時間間隔ΔTが増加される。
【0094】
継続時間の時間間隔ΔTは、電子センサ8による画像取得の頻度を変更せずに取得された画像をスキップするか、または、逆に、電子センサ8による画像取得の頻度を少なくすることで、増加させることができる。
【0095】
ここで、継続時間の時間間隔ΔTは、計算された回転角度θを0.5〜10°、好ましくは、0.5〜5°または1〜3°の範囲に維持するため、各回転角度θが計算された後、増減させるか、または、一定に保持される。
【0096】
ステップ90と並行して、ステップ91では、処理モジュール36は、回転角度θと、必要に応じて、ステップ86で計算された回転中心の座標Cとの関数により表示を変更するように、スクリーン4を制御する。この場合、スクリーン4の表示は、スクリーン4に表示された写真のような対象を、中心の座標Cの回りに回転角度θだけ回転させるように変更される。通常、このステップでは、表示された対象は、スクリーン4の面に垂直な軸の回りに回転する。
【0097】
次いで、ステップ92では、電子センサ8は、画像を最後に取得してから、時間間隔ΔTが経過した後、新たな画像を取得する。新たに取得された画像は、新たな第2画像となり、前回の第2画像は、第1画像となる。その後、ステップ68〜92が繰り返される。例えば、ステップ92では、ウインドウFに含まれる画素のみが電子センサ8により取得される。このことは、取得される画素数を制限し、従って、電子センサ8の電力消費を抑制する。
【0098】
図4の処理は、例えば、指が検知面12から離れると、終了する。
【0099】
他の種々の実施形態が可能である。例えば、パターンの画像を取得するために、容量または抵抗の測定に基づく技術を使用することができる。また、光学的またはその他の技術を含めることができる。電子センサ8の分解能は、一般には、250dpiまたは380dpiよりも大きく、好ましくは、500dpiよりも大きい。
【0100】
変形例として、パターンの画像のスクリーンと電子センサとは、同一である。従って、回転角度θおよび中心の座標Cは、スクリーンの表面において、通常、指でパターンを回転させることにより取得される。これは、特に、回転中心のX方向およびY方向の位置を指示するための極めて人間工学的な実施形態を構成する。事実、指は、回転させたい回転中心を自然に指し示す。
【0101】
ウインドウFは、水平、垂直、または、これら以外の方向とすることができる。
【0102】
変形例として、複数のウインドウFを同時に使用することができる。例えば、回転中心の概略推定位置を中心とする垂直ウインドウおよび水平ウインドウが使用される。この場合、上述した方法は、垂直ウインドウに対して一度実行され、次いで、2度目に水平ウインドウに対して実行される。
【0103】
ウインドウFは、この方法を実施するために、回転中心を中心とする必要はない。実際、画像におけるウインドウの位置がどこであっても、上述した方法では、回転角度θおよび回転中心の座標Cを決定することができる。なお、ウインドウの最も長い軸が回転中心を通り、または、少なくとも回転中心に近接することが好ましい。
【0104】
検知面12が比較的小さい場合、ウインドウFは、検知面12の大きさに等しく設定してもよい。これにより、アルゴリズムおよび計算が簡単になる。この場合、一般的には、センサが指に対して小さいため、回転角度だけが供給され、回転中心を指定することは困難である。
【0105】
グループGi、従って、区域Siは、重なってもよい。この場合、軸66に沿って隣接する2つのグループGiは、共通の画素を有する。反対に、グループGiおよび区域Siは、どのグループGiにも属さない画素により互いに分離されてもよい。この場合、軸66に沿って隣接する2つのグループGiの画素は、どのグループGiにも属さない画素により互いに分離される。これにより、特に、画素の数を増加させることなく、従って、回転角度θおよび回転中心の座標Cの計算を実行する処理回数を増加させることなく、ウインドウFの長さを増加させることが可能となる。
【0106】
グループGiは、異なる形状であってもよい。例えば、他の実施形態では、各グループGiは、F方向に平行な画素の行であり、その幅は、区域Siの幅と等しい。
【0107】
他の方法として、パターンの回転中心を粗く設定して実行してもよい。例えば、回転中心は、最小の平均値を有する画素のブロックの重心を採ることにより、粗く推定してもよい。この重心は、その平均値により画素ブロックの位置に重み付けをして計算してもよい。
【0108】
関心領域の選択は、省略してもよい。これは、例えば、電子センサ8の検知駆動面が小さく、この面の全ての画素が主要な計算能力を要求されることなく使用できる場合である。
【0109】
上述した方法の実施形態では、移動量diは、回転角度θまたは回転中心の座標Cの計算に使用されない。変形例として、これらの移動量diは、回転中心の座標Cの計算に使用される。
【0110】
線形回帰直線の係数aおよびbは、他のノルムまたは最小自乗法以外の方法を使用して計算してもよい。
【0111】
他の実施形態では、回転角度θを求めるため、傾きaの逆正接、または、少なくとも傾きaの逆正接の有限展開が計算される。この計算は、傾きaが所定の閾値を超えるときにのみ、必要に応じて実行される。この閾値以下である場合、回転角度θは、傾きaに設定される。
【0112】
区域Siの大きさは、全て同一である必要はない。例えば、ウインドウFの左右端に近接する区域Siの高さは、回転中心に近い区域Siの高さより高くてもよい。実際、ウインドウの端部に近い区域Siに含まれるグループGiの移動量yiは、恐らく、回転中心に近い区域Siに含まれるグループGiの移動量yiよりも大きい。
【0113】
上述した方法では、回転が検出されるパターンが指に形成された指紋である特別な場合について説明した。しかし、この方法は、電子センサ8により検出することができ、他の素材に形成される他のパターンの回転に基づいて、回転角度および回転中心の座標を計算することができる。例えば、パターンは、布や革のような素材に形成されるものでもよい。この素材は、例えば、ユーザが装着する手袋でもよい。事実、上述した方法は、取得された画像が、指紋や、布、革等の他の素材の構造のように、回転対称ではない任意のパターンに適用される。従って、変形例としては、ユーザの指を、このパターンを有する他の対象に置き換えることが可能である。例えば、パターンは、ユーザが操作するタッチペンの端部に形成されるものでもよい。
【0114】
また、上述した方法は、光学式マウスの目的として、回転角度、および回転中心の座標を取得するために適用される。この場合、光学式マウスは、それが移動する面に垂直な軸の回りに回転する。この光学式マウスは、同じパターンの第1画像および第2画像を取得する。そして、上述した方法は、これらの画像に基づき、回転角度および回転中心の座標を決定するために実行される。この場合、パターンは、例えば、マウスマットの一部またはテーブルの上面である。これらのパターンは、指紋のように、いかなる回転対称性も有しない画像を取得可能な濃淡の線または点を表す。後者の実施形態では、パターンよりも、むしろ回転される電子センサである。しかし、ここで説明した方法には、変わりはない。
【符号の説明】
【0115】
2 電子装置
4 スクリーン
6 接触型マンマシンインタフェース
8 電子センサ
10 電子チップ
12 検知面
14 指
16 隆起部
18 くぼみ
20 基板
22 回路
30 電子コンピュータ
32 結線
34 モジュール
36 処理モジュール
38 メモリ
60 指紋
66 軸
【特許請求の範囲】
【請求項1】
− 画像面に垂直な軸の回りにパターンを回転させる前に、電子センサにより前記パターンの第1画像を取得し(54)、
− 前記電子センサに対して、人により前記画像面に垂直な軸の回りに前記パターンを回転させ、
− 前記パターンの回転後、前記電子センサにより同じパターンの第2画像を取得し、画素により構成される前記第1画像および前記第2画像を電子メモリに記憶させ、
− 画素のグループGiが同じ配列軸に沿って配列され、前記各グループGiがこの軸に沿った各縦座標xiに関連付けられ、添え字iによりN個の画素の前記グループGiの中から前記グループGiが特定される、N個の異なる画素の前記グループGiを電子コンピュータにより前記第1画像から選択し(68、84)、
− 移動量yiは、前記グループGiに属する前記第1画像の画素と前記第2画像の画素との相関の計算から得られる移動量であり、前記各グループGiに対して、前記電子コンピュータにより、前記第1画像と前記第2画像とを比較し、前記配列軸に垂直な方向に対する前記第1画像と前記第2画像との間の前記グループGiの前記移動量yiを計算する(72)という処理を備える回転角度および回転中心座標の取得方法において、
前記電子コンピュータにより、次の式を最小にする線形回帰直線の係数aおよびbに基づいて前記回転角度および前記回転中心座標を計算する(86)ことを特徴とする回転角度および回転中心座標取得方法。
【数1】
− ||…||は、ノルム
− Nは、3以上の前記グループGiの数
【請求項2】
前記電子コンピュータは、
− 少なくとも幅の2倍の長さを有し、前記第1画像および前記第2画像よりも小さいウインドウを、取得した前記第1画像および前記第2画像の同じ位置に配置し(62)、
− 前記ウインドウに含まれる前記第1画像および前記第2画像の画素だけを処理し、前記各移動量yiの計算を実行する(72)
ことを特徴とする請求項1記載の回転角度、および回転中心座標取得方法。
【請求項3】
前記電子センサは、前記ウインドウに含まれる前記画素のみを取得する(92)ことを特徴とする請求項2記載の回転角度、および回転中心座標取得方法。
【請求項4】
前記電子コンピュータは、
− 前記ウインドウを、画素の前記各グループGiの全ての画素を備える前記第1画像の少なくともN個の各区域Siに分割し(64)、
− 対応する前記区域Siに含まれる前記第1画像および前記第2画像の画素だけを処理し、前記各移動量yiの計算を実行する(72)
ことを特徴とする請求項2または3記載の回転角度および回転中心座標取得方法。
【請求項5】
前記電子コンピュータは、
− 前記移動量yiを所定の閾値と比較し(84)、
− 前記所定の閾値を超える場合に前記移動量yiとそれに関連する縦座標xiが前記回転角度および前記回転中心座標の計算に考慮されず、超えない場合に前記移動量yiと関連する前記縦座標xiが前記計算に考慮される
ことを特徴とする請求項1〜4のいずれか1項に記載の回転角度および回転中心座標取得方法。
【請求項6】
前記電子コンピュータは、
計算された角度を0.5〜10°の範囲に維持するため、前記第1画像および前記第2画像の前に取得された少なくとも1つの画像に基づいて計算された前記回転角度の関数として、前記第1画像と前記第2画像との時間間隔を調節する(90)
ことを特徴とする請求項1〜5のいずれか1項に記載の回転角度および回転中心座標取得方法。
【請求項7】
電子コンピュータにより、取得した回転角度および回転中心の座標の関数として、スクリーンに表示された対象を回転させるための前記スクリーンの制御方法において、
請求項1〜6のいずれか1項に記載の方法を実行することにより、前記回転角度を取得することを特徴とする表示スクリーン制御方法。
【請求項8】
電子コンピュータにより実行される請求項1〜7のいずれか1項に記載の方法を実行するための命令を備えることを特徴とする情報記録媒体(38)。
【請求項9】
− スクリーン(4)と、
− 画像面に垂直な軸の回りに人によりパターンを回転させる前の前記パターンの第1画像と、この回転後の同じパターンの第2画像とを取得することができ、画素により構成される前記第1画像および前記第2画像が電子メモリに記憶される電子センサ(8)と、
− 取得された回転角度および回転中心の座標の関数として前記スクリーンに表示される対象を回転させるように前記スクリーンを制御するとともに、前記回転角度を取得するためにプログラムされた電子コンピュータ(30)とを備え、
画素のグループGiが同じ配列軸に沿って配列され、前記各グループGiがこの軸に沿った各縦座標xiに関連付けられ、添え字iによりN個の画素の前記グループGiの中から前記グループGiが特定される、N個の異なる画素の前記グループGiを前記電子コンピュータ(30)により前記第1画像から選択し、
移動量yiは、前記グループGiに属する前記第1画像の画素と前記第2画像の画素との相関の計算から得られる移動量であり、前記各グループGiに対して、前記電子コンピュータ(30)により、前記第1画像と前記第2画像とを比較し、前記配列軸に垂直な方向に対する前記第1画像と前記第2画像との間の前記グループGiの前記移動量yiを計算する装置において、
前記電子コンピュータ(30)は、次の式を最小にする線形回帰直線の係数aおよびbに基づいて、前記回転角度および前記回転中心座標を計算する(86)ためにプログラムされることを特徴とする装置。
【数2】
− ||…||は、ノルム
− Nは、3以上の前記グループGiの数
【請求項10】
前記電子センサは、指紋センサまたは光学式マウスであることを特徴とする請求項9記載の装置。
【請求項1】
− 画像面に垂直な軸の回りにパターンを回転させる前に、電子センサにより前記パターンの第1画像を取得し(54)、
− 前記電子センサに対して、人により前記画像面に垂直な軸の回りに前記パターンを回転させ、
− 前記パターンの回転後、前記電子センサにより同じパターンの第2画像を取得し、画素により構成される前記第1画像および前記第2画像を電子メモリに記憶させ、
− 画素のグループGiが同じ配列軸に沿って配列され、前記各グループGiがこの軸に沿った各縦座標xiに関連付けられ、添え字iによりN個の画素の前記グループGiの中から前記グループGiが特定される、N個の異なる画素の前記グループGiを電子コンピュータにより前記第1画像から選択し(68、84)、
− 移動量yiは、前記グループGiに属する前記第1画像の画素と前記第2画像の画素との相関の計算から得られる移動量であり、前記各グループGiに対して、前記電子コンピュータにより、前記第1画像と前記第2画像とを比較し、前記配列軸に垂直な方向に対する前記第1画像と前記第2画像との間の前記グループGiの前記移動量yiを計算する(72)という処理を備える回転角度および回転中心座標の取得方法において、
前記電子コンピュータにより、次の式を最小にする線形回帰直線の係数aおよびbに基づいて前記回転角度および前記回転中心座標を計算する(86)ことを特徴とする回転角度および回転中心座標取得方法。
【数1】
− ||…||は、ノルム
− Nは、3以上の前記グループGiの数
【請求項2】
前記電子コンピュータは、
− 少なくとも幅の2倍の長さを有し、前記第1画像および前記第2画像よりも小さいウインドウを、取得した前記第1画像および前記第2画像の同じ位置に配置し(62)、
− 前記ウインドウに含まれる前記第1画像および前記第2画像の画素だけを処理し、前記各移動量yiの計算を実行する(72)
ことを特徴とする請求項1記載の回転角度、および回転中心座標取得方法。
【請求項3】
前記電子センサは、前記ウインドウに含まれる前記画素のみを取得する(92)ことを特徴とする請求項2記載の回転角度、および回転中心座標取得方法。
【請求項4】
前記電子コンピュータは、
− 前記ウインドウを、画素の前記各グループGiの全ての画素を備える前記第1画像の少なくともN個の各区域Siに分割し(64)、
− 対応する前記区域Siに含まれる前記第1画像および前記第2画像の画素だけを処理し、前記各移動量yiの計算を実行する(72)
ことを特徴とする請求項2または3記載の回転角度および回転中心座標取得方法。
【請求項5】
前記電子コンピュータは、
− 前記移動量yiを所定の閾値と比較し(84)、
− 前記所定の閾値を超える場合に前記移動量yiとそれに関連する縦座標xiが前記回転角度および前記回転中心座標の計算に考慮されず、超えない場合に前記移動量yiと関連する前記縦座標xiが前記計算に考慮される
ことを特徴とする請求項1〜4のいずれか1項に記載の回転角度および回転中心座標取得方法。
【請求項6】
前記電子コンピュータは、
計算された角度を0.5〜10°の範囲に維持するため、前記第1画像および前記第2画像の前に取得された少なくとも1つの画像に基づいて計算された前記回転角度の関数として、前記第1画像と前記第2画像との時間間隔を調節する(90)
ことを特徴とする請求項1〜5のいずれか1項に記載の回転角度および回転中心座標取得方法。
【請求項7】
電子コンピュータにより、取得した回転角度および回転中心の座標の関数として、スクリーンに表示された対象を回転させるための前記スクリーンの制御方法において、
請求項1〜6のいずれか1項に記載の方法を実行することにより、前記回転角度を取得することを特徴とする表示スクリーン制御方法。
【請求項8】
電子コンピュータにより実行される請求項1〜7のいずれか1項に記載の方法を実行するための命令を備えることを特徴とする情報記録媒体(38)。
【請求項9】
− スクリーン(4)と、
− 画像面に垂直な軸の回りに人によりパターンを回転させる前の前記パターンの第1画像と、この回転後の同じパターンの第2画像とを取得することができ、画素により構成される前記第1画像および前記第2画像が電子メモリに記憶される電子センサ(8)と、
− 取得された回転角度および回転中心の座標の関数として前記スクリーンに表示される対象を回転させるように前記スクリーンを制御するとともに、前記回転角度を取得するためにプログラムされた電子コンピュータ(30)とを備え、
画素のグループGiが同じ配列軸に沿って配列され、前記各グループGiがこの軸に沿った各縦座標xiに関連付けられ、添え字iによりN個の画素の前記グループGiの中から前記グループGiが特定される、N個の異なる画素の前記グループGiを前記電子コンピュータ(30)により前記第1画像から選択し、
移動量yiは、前記グループGiに属する前記第1画像の画素と前記第2画像の画素との相関の計算から得られる移動量であり、前記各グループGiに対して、前記電子コンピュータ(30)により、前記第1画像と前記第2画像とを比較し、前記配列軸に垂直な方向に対する前記第1画像と前記第2画像との間の前記グループGiの前記移動量yiを計算する装置において、
前記電子コンピュータ(30)は、次の式を最小にする線形回帰直線の係数aおよびbに基づいて、前記回転角度および前記回転中心座標を計算する(86)ためにプログラムされることを特徴とする装置。
【数2】
− ||…||は、ノルム
− Nは、3以上の前記グループGiの数
【請求項10】
前記電子センサは、指紋センサまたは光学式マウスであることを特徴とする請求項9記載の装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−20624(P2013−20624A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−156069(P2012−156069)
【出願日】平成24年7月12日(2012.7.12)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2012−156069(P2012−156069)
【出願日】平成24年7月12日(2012.7.12)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
【Fターム(参考)】
[ Back to top ]