
地図表示方法
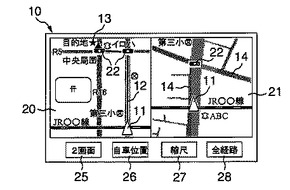
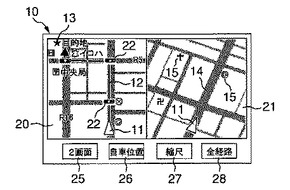
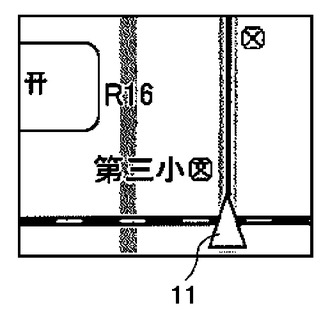
車両の走行状況に拘らず、表示される道路地図の内容を容易にかつ明確に把握できるようにする地図表示方法。 表示画面10で表示される要約地図では、自車位置にかかわらず、自車位置11と目的地13とこれら間の誘導経路12とを含む領域が簡略化されて表示される。目的地13から離れているときには、図2Aに示すように、広域の要約地図が表示され、道路14や施設15などのオブジェクトもより制限される。自車位置11が目的地13に近づいてくると、図2Bに示すように、縮尺率が小さくなって中域の要約地図となり、これとともに、表示されるオブジェクトも多くなる。自車位置11が目的地13の近くになると、図2Cに示すように、さらに狭い領域を要約表示するとともに、ほとんどのオブジェクトが表示されることになり、目的地13周辺を詳しく把握することができる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の現在位置を測定し、この現在位置を含む地図とこの地図上にこの車両の現在位置とを表示画面に表示し、この車両の搭乗者を目的地まで誘導する地図表示方法に関する。
【背景技術】
【0002】
従来、搭乗者にとって目的地までの経路を見易くし、目的地まで車両を確実に誘導するようにしたカーナビゲーション装置が提案されている(例えば、特開平7−103779号公報)。
【特許文献1】特開平7−103779号公報
【0003】
この特許文献1に記載のカーナビゲーション装置は、車両の目的地への走行の経過とともに、表示される道路地図の縮尺を変更し、目的地に近づくにつれて表示される道路地図が順次拡大されていくようにするものである。これは、車両の現在位置と目的地との間の直線距離と表示画面の対角線の長さとの比に応じて、常に車両の現在位置が表示画面の1つの角部近傍に表示され、目的地がこの角部とは反対側の対角線上角部近傍に表示されるように、表示する道路地図の縮尺が決められるものである。
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、上記特許文献1に記載のカーナビゲーション装置では、目的地に近づくほど、より詳細な道路地図が表示されるが、目的地からある程度離れたエリアを走行しているときには、そのときの広い領域を表わす道路地図では、道路や施設などを表わすマークが細かく表示され、また、地名や道路名,施設名なども細かく表示されることになり、特に、車両を運転する搭乗者にとっては、非常に見づらいものとなる。このため、かかる道路地図からは、自車がどこを走行中であるのか、把握するのが容易でない場合もある。
【0005】
また、カーナビゲーション装置では、自車位置付近の道路地図を表示することもできるようにしているが、同じ縮尺のかかる道路地図にしても、高速道路でのように、高速に走行している場合と、一般道でのように、高速には走行できない場合とでは、搭乗者の表示される道路地図の見方が異なるものであり、高速走行中では、かかる道路地図を見ても、自車がどこを走行中であるのか、把握するのが容易でない場合もある。
【0006】
本発明の目的は、かかる問題を解消し、車両の走行状況に拘らず、表示される道路地図の内容を容易にかつ明確に把握できるようにした地図表示方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、代表的な本発明は、車両の現在位置を検出し、検出したこの車両の現在位置を表わす自車位置マークと該車両が走行する誘導経路とを含めた道路地図を表示する地図表示方法であって、車両の現在位置から目的地までの誘導経路を表わす要約地図を表示し、この要約地図は、車両の現在位置から目的地までの距離に応じた要約度で要約された地図とするものである。
【0008】
また、この要約地図は、その要約度に応じて、要約地図を構成する道路や表示要素の表示量を異ならせるものである。
【0009】
また、本発明は、車両の現在位置を検出し、検出したこの車両の現在位置を表わす自車位置マークと車両が走行する誘導経路とを含む道路地図を表示する地図表示方法であって、車両の現在位置からの誘導経路を含む局所的な領域を表わす要約地図を表示し、この局所的な要約地図は、車両の走行速度に応じて、要約地図を構成する道路や表示要素の表示量を異ならせるものである。
【0010】
また、この局所的な要約地図は、車両の走行速度に応じて表示領域の範囲が変化するものである。
【発明の効果】
【0011】
本発明によれば、平面地図に対して簡略化して走行経路が表わされる要約地図を表示させることができ、しかも、自車と目的地との間の距離に応じて要約地図の縮尺率を変化させて表示領域の範囲を異ならせるものであるが、自車が誘導経路上のどの位置にあっても、要約地図が見易いものとなり、直感的に自車の位置関係を把握することができる。
【0012】
また、要約地図でのオブジェクトの表示量が自車と目的地との間の距離に応じて変わるようにしているから、自車が誘導経路上のどの位置にあっても、要約地図がさらに見易いものとなる。
本発明の他の目的、特徴及び利点は添付図面に関する以下の本発明の実施例の記載から明らかになるであろう。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施形態を図面を用いて説明する。
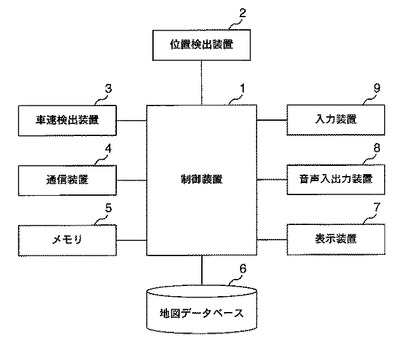
図1は本発明による地図表示方法の一実施形態のためのカーナビゲーション装置を示すブロック構成図であって、1は制御装置、2は位置検出装置、3は車速検出装置、4は通信装置、5はメモリ、6は地図データベース、7は表示装置、8は音声入出力装置、9は入力装置である。
【0014】
同図において、地図データベース6には、各地域の地図データが格納されており、かかる地図データは通信装置4を介して外部から一旦メモリ5にダウンロードされる。メモリ5に記憶された地図データは、制御装置1の制御のもとに、地図データベース6に格納される。ここでは、最初から全国の地図データを格納しておく必要がなく、このカーナビゲーション装置を搭載した車両(以下、自車両という)が移動する地域の地図データがないときには、通信装置4を介してサーバ(図示せず)にこの地域の地図データを要求し、このサーバから配信して貰うようにすることができる。勿論、予め全地図データを地図データベース6に格納しておくこともできる。
【0015】
地図データベース6には、地図データの構成要素としての道路データと表示要素のデータとが格納されており、地図データベース6からかかる構成要素のデータを読み出して組み合わせることにより、道路地図データが得られ、これによって表示装置7の表示画面に道路地図が表示される。ここで、表示要素は、鉄道や学校,コンビニエンスストア,橋などといった施設、信号機などの設備などに関する要素(これらを表わす記号や名称など)である。
【0016】
位置検出装置2は、例えば、GPS(Global Positioning System)などの自車両の位置を検出する装置であり、また、車速検出装置3は、自車両の移動速度を検出する装置である。位置検出装置2では、所定の周期で自車両の位置(以下、自車位置という)が検出され、この位置検出装置2の位置検出タイミングの間の位置検出がこの車速検出装置3の検出結果に基づいて行なわれる。
【0017】
入力装置9は搭乗者が操作する機械的なスイッチ手段や表示装置7の表示画面に表示されるタッチスイッチなどからなるものであって、搭乗者はこの入力装置9を操作することにより、カーナビゲーション装置に所望の動作をさせる指令を入力する。
【0018】
制御装置1は、入力装置9からのかかる指令に基づいてナビゲーションのための各部の制御を行なうものであって、位置検出装置2からの位置情報と車速検出装置3からの車速情報とに基づく自車位置に応じた道路地図データを地図データベース6から読み取り、これに現在の自車位置を示すマーク(即ち、自車位置マーク)を付加して表示装置7に表示させる。この実施形態では、道路地図データの表示装置7での表示形態として、説明を省略するが、道路地図を通常の2次元的に表示する平面表示や2次元の道路地図を高い視点から眺めたように表示する鳥瞰表示,鳥瞰表示で、さらに、建物などの3次元形状のものや地面の隆起などが立体的に表示するようにした立体表示が可能であるが、さらに、後述するように、2次元の道路地図から必要な情報を取捨選択し、道路などを形状加工することにより単純化して表示する要約表示もあるし、以上の表示形態の何れかを組み合わせて表示する2画面表示も可能である。平面表示以外の表示形態で道路地図を表示する場合には、制御装置1は地図データベース6から読み取った道路地図データを加工し、表示装置7で表示させる。
【0019】
なお、音声入出力装置8は、表示装置7の表示画面で表示される道路地図での自車両の誘導に連動して音声案内などを出力するスピーカや、ディスクなどの記録媒体の再生装置などからなるものである。
【0020】
次に、この実施形態の表示形態について説明する。
【0021】
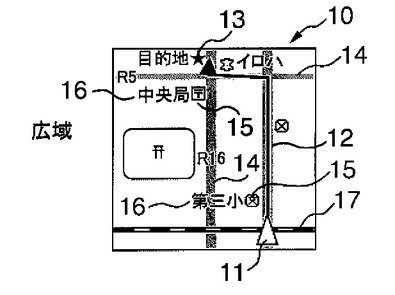
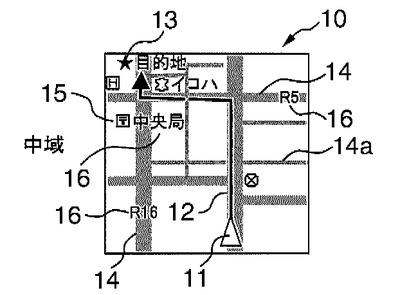
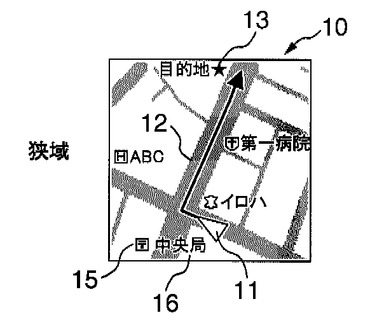
図2A〜2Cは本発明による地図表示方法の一実施形態を示すものであって、自車位置から目的地までの距離に応じた要約地図を示しており、10は表示装置7の表示画面、11は自車位置、12は自車の誘導経路、13は目的地、14は誘導経路12以外の道路、15は施設の記号、16は道路や施設などの名称である。
【0022】
この実施形態での要約地図は、現在の自車位置から目的地までの領域を要約して表示したものであり、自車位置75相的地に近づくにつれて縮尺率が大きくなり、表示装置7の表示画面に表示する地図の領域が狭くなっていくものである。
【0023】
ここで、「縮尺率」とは、かかる表示画面に地図を表示するときのこの地図が縮尺される度合いを表わすものである。例えば、表示装置7の表示画面に縮尺されないで表示される地図に対する縮尺率を1とし、これより広い領域の地図をこの表示画面に表示するときには、この地図を表示画面の大きさに縮小しなければならないが、このときの縮尺率は1よりも小さい。例えば、縮尺率α=1の地図の4倍の領域の地図を表示画面に表示する場合には、この領域の地図は1/4倍に縮小されて表示されることになるが、このとき、縮尺率α=1/4である。
【0024】
また、要約地図での道路や表示要素は、自車位置から目的地までの距離が長くて広い領域が表示されるほど、制限されるものである。即ち、要約地図は、その縮尺率が変化しても、道路や表示要素を見易くするものである。このため、表示される同じ道路や同じ表示要素が、縮尺率が異なっても、同じような大きさで表示されるようにするし、表示要素同士も重なり合わないようにする。そして、このように道路や表示要素を表示するためには、地図の縮尺率によっては、これら道路や表示要素の表示する量を制限し、かつ見易くするための加工が必要となる。このように制限量や加工の度合いが、要約地図をどの程度要約するかという要約の度合い、即ち、要約度によって決まるものである。
【0025】
例えば、いま、縮尺率α=1の地図(以下、基準地図という)に対し、その4倍のこの基準地図の領域を含む領域の地図(縮尺率α=1/4)をそのまま1/4倍に縮小して表示する場合、道路も、また、表示要素も縮小されて表示され、非常に見づらいものである。このため、道路も表示要素も、例えば、1/4に間引いてその表示量を減らし、かつ間引き後の表示される道路や表示要素を拡大加工して重ならないようにすることにより、これらが見易くなるようにしたものが要約地図であるが、このような道路や表示要素の間引きや加工の度合いがこの要約地図の要約度によって決まるのである。
【0026】
図2A〜2Cは表示装置7(図1)の表示画面10に表示される要約地図の例を示すものである。かかる要約地図では、道路14や施設の記号15,地名や施設名(名称16)などを表わす文字などが表示されるとともに、現在の自車位置11を示す△印のマーク(自車位置マーク)や目的地13を示す星印のマーク(目的地マーク),自車位置から目的地までの自車の誘導経路12などが表示される。
【0027】
この実施形態では、要約地図が、現在の自車位置から目的地までの誘導経路を含むように、表示画面10に表示されるものであり、このため、現在の自車位置から目的地までの距離に応じて要約地図の縮尺率が変化し、表示される領域の大きさが変化する。
【0028】
図2Aは現在の自車位置から目的地までの距離が長い場合の要約地図を示すものであって、この場合には、縮尺率が小さく、広い領域が要約されて表示される。この広域の要約地図では、誘導経路12とともに、主要な道路14や鉄道17,河川,主要な施設の記号15、それに、これらの名称16など、車両を運転する搭乗者にとって目印として判り易いものであって、かつ要約地図上では、煩雑せずに見易いように、その道路や表示要素が制限され、加工される。
【0029】
これら道路や表示要素も、現在の自車位置から目的地までの距離が短くなっていき、縮尺率が大きくなっていって要約地図が表わす領域が狭くなるとともに、表示量の制限も緩くなっていき、例えば、図2Bに示すように、中域の要約地図になると、誘導経路12に交差する道路14aも表示されるようになる。
【0030】
さらに、車両が誘導されて目的地13に近くなると、図2Cに示すように、狭域の道路地図が表示される。この狭域の道路地図は、縮尺率α=1の地図である場合、要約されておらず、誘導経路12とともに、全ての道路や表示要素が表示される。この場合、これら道路は全て、その幅や長さ,形状(曲がり具合など)が通常の道路地図と同様にして、リアルに表示される。また、この要約地図に表示される施設やその名称などの表示要素も多くなり、目的地13を探し出し易くする。
【0031】
なお、縮尺率α=1の地図は、地図データベース6(図1)から表示装置7の表示画面に表示可能な領域をそのまま切り出して得られる地図データによるものであるが、この場合も、道路や表示要素を適宜制限、加工したものであってもよい。
【0032】
また、以上の一連の要約地図は、車両の走行に伴う自車位置11と目的地13との間の距離が変化するとともに、縮尺率が次第に大きくなって表示領域が狭くなり、要約地図が拡大表示されていくことになる。この場合、位置検出装置2や車速検出装置3(図1)により、1秒前後〜数秒間隔で自車位置の検出が行なわれ、この検出結果に基づいて、要約地図が作成される。従って、この場合には、かかる時間間隔毎に要約地図の縮尺率が変化し、表示領域が狭くなっていて要約道路地図が表示画面10に順次拡大表示されていくことになる。
【0033】
図3A〜3Cは本発明による地図表示方法の他の実施形態を示す図であって、2画面表示の例を示すものであり、20は要約地図、21は平面地図、22は信号機である。なお、図2A〜2Cに対応する部分には同一符号を付けて重複する説明を省略する。
【0034】
図3Aは自車位置11から目的地13までの距離が長い場合(遠距離にある場合)の2画面表示を示すものである。表示装置7(図1)には、表示画面10とともに、「2画面」ボタン25,「自車位置」ボタン26,「縮尺」ボタン27,「全経路」ボタン28といった操作手段が設けられており、「2画面」ボタン25を操作することにより、表示画面10の、例えば、左半分に要約地図20が、右半分に平面地図21が表示される。要約地図20の構成要素(道路と表示要素)は図2A〜2Cに示す要約地図と同様であるが、「自車位置」ボタン26を操作することにより、自車位置付近の要約地図が表示される。
【0035】
平面地図21は、通常の道路地図であるが、「全経路」ボタン28を操作することにより、現在の自車位置11から目的地13までの全経路の平面地図21が表示される。また、このときの縮尺率を最小縮尺率として、「縮尺」ボタン27を操作することにより、平面地図21の縮尺率を変更することができ、これにより、縮尺率が大きくなるほど、平面地図21として表示される領域が狭くなってより拡大表示される。但し、表示される平面地図21は、必ず現在の自車位置11を含む領域のものであり、これにより、自車位置付近の状況を詳細に知ることができる。
【0036】
車両が走行し、車両11が目的地13に近づいてきて目的地13から中距離の位置になると、図3Bに示すように、要約地図20では、図2Bに示す要約地図10と同様、図3Aに示す要約地図20では表示されなかった道路や表示要素が新たに表示されるようになる。これに対し、平面地図21は、「縮尺」ボタン27や「全経路」ボタン28が操作されない限り、同じ縮尺率で表示される。但し、車両の走行とともに、表示される領域が移っていく。
【0037】
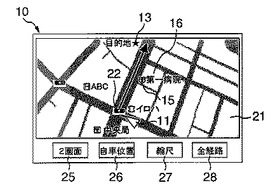
そして、自車位置11が目的地13から予め決められた所定の距離の範囲内に近づくと、図3Cに示すように、自車位置11から目的地13までを含む平面地図21のみを表示する1画面表示に移る。
【0038】
このように、かかる要約地図とともに、自車位置近辺の局所的な平面地図も同時に2画面表示で表示することができ、しかも、平面地図の縮尺率を可変とするものであるから、要約地図で目的地までの自車位置を概略的に把握できるとともに、局所的な平面地図を表示させることにより、現在の自車位置付近の状況を詳しく把握することもでき、装置の誘導に従う運転がよりスムーズに行なうことができるようになる。
【0039】
なお、上記のように、平面地図に代えて鳥瞰表示または立体表示との組み合わせにすることもできる。この場合には、自車位置周辺については、より現実の視野に沿った情報を提供できる。また、メニューバーに画面切替えのボタンを設け、表示を切り替えることができるようにしてもよい。
【0040】
ここで、図4により、図1における制御装置1による要約地図の表示のための動作の一具体例について説明する。
【0041】
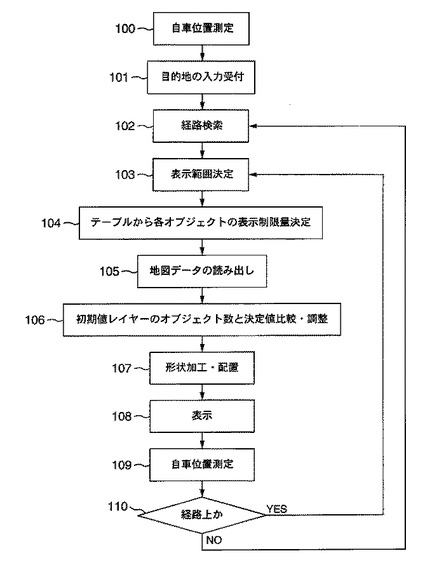
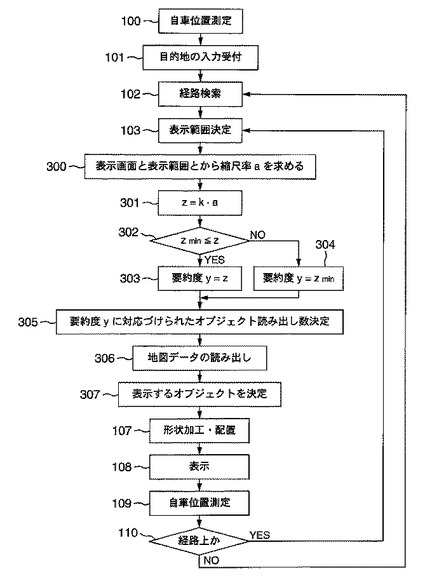
同図において、まず、図示しない電源スイッチが投入されると、位置検出装置2の検出出力により、自車位置を測定する(ステップ100)。そして、入力装置9から目的地が入力されると(ステップ101)、地図データベース6での道路や表示要素のデータからなる地図データを用いて自車位置から目的地までの経路(誘導経路)を検索する(ステップ102)。そして、自車位置と目的地と検索した誘導経路とから、表示装置7の表示画面10で表示するこれらを含む表示範囲を決定する(ステップ103)。
【0042】
この表示範囲の決定方法の一具体例を図5で説明する。
【0043】
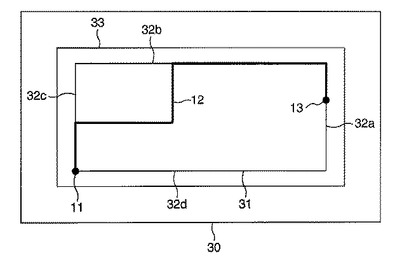
同図において、いま、位置検出装置2の検出出力で得られた自車位置情報と入力装置9から入力された目的地情報とからこれらを含む地図データ30が地図データベース6で検索され、この地図データ30上で自車位置11と目的地13とが決定されて、所定の条件のもとに自車位置11から目的地13までの誘導経路12が検索される。そして、これら自車位置11と目的地13と誘導経路12とのうちの最も東側の位置を通る南北に延びる直線32aと、最も北側の位置を通る東西に延びる直線32bと、最も西側の位置を通る南北に延びる直線32cと、最も南側の位置を通る東西に延びる直線32dとを4つの辺とする正方形、もしくは矩形状の領域を検出して経路領域31とし、さらに、かかる経路領域31を含む縦横比が表示装置7の表示画面10のアスペクト比に等しい地図表示領域33とする。図4のステップ103により、この地図表示領域33が表示範囲として決定される。
【0044】
一方、表示装置7の画面のサイズに応じて、オブジェクト(文字/シンボルなどの表示要素と道路)の種類毎に表示の制限量を決めるテーブルが設定されている。かかる制限量としては、個数で設定されていてもよいし、また、表示画面10の面積に対する占有面積比率(=表示要素の占有面積総数(ピクセル数)/表示画面10の面積(ピクセル数))で設定されていてもよい。次の表1は、文字/シンボルと道路とに対し、表示制限量を個数(本数)で表わしたテーブルの例を示すものであり、表2は、同じく占有面積比率で表わしたものである。
【表1】
【表2】
例えば、図面サイズが6インチの表示画面の場合、文字/シンボルは最大30個(もしくは、最大占有面積比率20%で)表示できるものであり、道路は最大50本(もしくは、最大占有面積比率30%で)表示できるものである。
【0045】
図4に戻って、このようにして表示範囲が決定されると(ステップ103)、上記のテーブルから各オブジェクト(地図の構成要素である道路や表示要素)の上記表1や表2に示すような表示制限量を読み取り(ステップ104)、また、地図データベース6から表示範囲(即ち、図5で説明したようにして決定した地図表示領域33)の地図データが読み出されてメモリ5に一時格納される(ステップ105)。
【0046】
この地図データは、上記のように、オブジェクトのデータからなり、地図データベース6から読み出したオブジェクトの種別毎の個数を求め(この種別毎の個数を初期値レイヤーのオブジェクト数という)、この初期値レイヤーのオブジェクト数とステップ104で得た表示制限量とを比較し、実際に表示する要約地図でのオブジェクトの種別毎の表示個数が最大この表示制限値となるように調整して、初期値レイヤーのオブジェクトの中から実際に表示する道路や表示要素を決定する(ステップ106)。
【0047】
ここで、この具体例では、上記の表1や表2で示される表示制限量にオブジェクトの表示量が制限されるのであるが、この表示制限量により、要約地図の縮尺率に応じてこの要約地図の要約の度合い、即ち、要約度が異なってくる。
【0048】
即ち、いま、縮尺率α1で要約地図を表示する場合、この要約地図を表示するために地図データベース6から読み取るあるオブジェクト「道路」の個数(初期値レイヤーのオブジェクト数)をn1とし、このオブジェクトに対する表示制限量がM(例えば、表1での画面サイズに対する「50本」)と設定されているものとすると、この要約地図では、本来道路がn1個あるのに、そのうちのM個しか表示されないことになり、この要約地図は、オブジェクト「道路」に対し、このように要約されていることになる。そして、この要約地図での表示される道路の割合y1は、y1=M/n1となり、これがこの要約地図の要約の度合い、即ち、要約度を表わしていることになる。
また、縮尺率α2(<α1)で要約地図を表示する場合、これに対して地図データベース6から読み取るオブジェクト「道路」の初期値レイヤーのオブジェクト数をn2(但し、α2<α1であるから、縮尺率α1で要約地図よりも広い領域の要約地図であるから、n2>n1である)とすると、この要約地図に対する要約度y2は、y2=M/n2である。従って、y1>y2であるから、要約地図の縮尺率αに応じて、要約地図の要約度yは異なることになる。
【0049】
また、換言すれば、要約地図は、かかる要約度yに応じて表示するオブジェクトの量が制限されることにより、要約されているものであり、要約度に応じた要約がなされていることになる。
【0050】
この初期値レイヤーのオブジェクトの中から実際に表示するオブジェクトを決定する一方法として、種別毎にその種別の種類に優先度を設定し、優先度が高い順から上記決定値に等しい個数を選択する方法がある。次に、これを、道路データを例にして、図6〜図8により説明する。
【0051】
ここでは、要約地図で表示するオブジェクト「道路」として、例えば、図6に示すように、誘導経路12となる道路、高速道路や国道,県道といった主要道路14a、誘導経路12に枝葉状に接続される経路枝葉道路14b、例えは、観光などのために名称が付けられた名称付きの道路14c、経路枝葉道路に直進して接続される直進接続道路14d、その他の道路といった種類に区分されるものとし、夫々の種類毎に優先度が設定されている。
【0052】
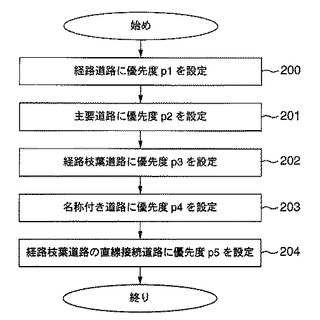
図4でのステップ106で実際に表示するオブジェクト「道路」を設定するに当たっては、上記の種別「道路」の種類毎に設定されている優先度が使用されるが、かかる優先度の一例を図7で説明すると、まず、誘導経路12となる道路に優先度p1が設定され(ステップ200)、主要道路14aに優先度p2が設定され(ステップ201)、経路枝葉道路14bに優先度p3が設定され(ステップ202)、名称付き道路14cに優先度p4が設定され(ステップ203)、経路枝葉道路の直進接続道路14dに優先度p5が設定されており(ステップ204)、以上以外の道路には優先度が設定されていない。
【0053】
図8は以上のように優先度が設定された道路データを示す図である。
【0054】
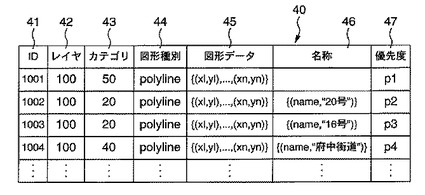
同図において、道路データは、この道路データを識別するためのID(Identification)41、オブジェクトの種別が「道路」であることを表わすレイヤ42、道路の種類(図7に示すように、経路道路,主要道路,……などをいったもの)を表わすカテゴリ43、道路の表示の際の図形の形状を表わす図形種別45、表示要素の名称46とからなり、上記のように優先度が付加されたときには、優先度47が設けられる。
【0055】
ここでは、道路データを例にしており、この場合の種別はレイヤ「100」で表わされるものとしている。カテゴリは、図6を参照して、オブジェクト「道路」での種類が誘導経路12である場合には「500」とし、主要道路14aの場合には「400」、名称付き道路14cの場合には「200」としており、道路の他の種類も、その種類に応じたカテゴリが設定されている。図形種別44は、ここでは、「polyline」として多数の直線からなる折線であることを示しており、例えば、多角形の場合には、「polygon」などと表わされる。図形データ45は道路の存在位置を緯度,経度(あるいは直交座標系上の縦軸,横軸成分)で表わするものであり、例えば、道路の場合には、その構成点列座標で表わす。また、道路に名称がある場合(例えば、○○自動車道,国道××号,△△ラインといったようなもの)には、その名称46が付される。
【0056】
なお、図8に示すデータの全てが必須のものというものではないが、レイヤ42とカテゴリ43は、これらのうちの少なくとも1つが種別を特定するのに必要である。図形種別44と図形データ45は図形の種別(点、折線、多角形など)の分類、図形のデータを表わしており、同様の内容を表現できていれば、1つにまとめた項目で記載するようにしてもよい。名称46は、現在走行中の道路やこれに交差する道路などの名称を表示するため、必須のものである。優先度47は、地図データベース6(図1)の整備時に定まるものについては、付加しておく。このようにすると、図7で示す優先度の設定処理が簡略化できる。
【0057】
図4に戻って、道路データの場合、ステップ104で求める決定値としては、表示画面10に対する道路の総表示面積の割合(%)としてもよい。ステップ106では、この決定値に合うように調整しながら、表示する道路の優先度の限界を決める(ステップ106)。この場合、「調整」とは、優先度を下位側に1つ進めると、この優先度までの道路の本数、もしくは表示画面10に占める面積(ピクセル数)を計算し、この面積と表示画面10の面積との割合(%)を求め、かかる本数もしくは占有面積比率と表示制限量とを比較して表示制限量を越えたか否かを判定し、越えない場合には、さらに1つ下位の優先度に進めて表示する道路の本数もしくは占有面積を増やし、越えた場合には、そのときの最下位の優先度の道路を減らしていくものである。あるいはまた、地図データベース6から読み出した道路データのうち、最下位の優先度のものから順に除いていって表示制限量に合うようにする。
【0058】
なお、ステップ106では、経路道路や交差道路などの状況に応じて道路の優先度を変更し、表示する道路を調整するようにすることもできる。
【0059】
また、図4のステップ104では、各オブジェクトの表示制限量を表示画面10のサイズ(表1)や占有面積比率(表2)で一意的に決めるようにしたが、地図データベース6を、例えば、図2A〜2Cに示した広域,中域,狭域のように、縮尺率を区分して夫々の区分毎に設け、これら地図データベース毎に各オブジェクトの表示制限量を設定し(要するに、地図データを広域,中域,狭域夫々の地図データに区分し、夫々毎に各オブジェクトの表示制限量を設定し)、表示する道路地図の縮尺率に応じてオブジェクトの表示制限量を異ならせるようにすることができる。勿論、この場合、かかる縮尺率の区分内においても、上記の表1や表2に示すようなサイズなどに応じて表示制限量を設定するようにして、表示画面10のサイズに応じても、表示制限量を異ならせるようにしてもよい。
【0060】
このようにして、表示するオブジェクトが決まると、次に、後述するようにして、そのオブジェクト、即ち、道路や表示要素の形状(道路の太さや文字シンボルの大きさなど)を加工するデータ処理を行ない、さらに、加工された道路上に加工された表示要素を、これら表示要素が互いに重ならないように、配置するためのデータ処理を行なう(ステップ107)。そして、図2A〜2C,図3A〜3Cに示すように、形状加工した表示要素による要約地図を、図2A〜2C,図3A〜3Cに示すように、表示装置7の表示画面10に表示する(ステップ108)。
【0061】
次いで、自車位置11の測定を行ない(ステップ109)、自車が誘導経路12上にあるか否かを判定し(ステップ110)、誘導経路12上にあるときには、測定した自車位置11と目的地13とから表示範囲を決定し(ステップ103)、この決定した表示範囲に対し、ステップ104からの動作を繰り返し、自車が誘導経路12上にないときには(即ち、経路を変更した場合には)、新たな誘導経路を検索し(ステップ102)、ステップ103からの動作を繰り返す。
【0062】
このようにして、例えば、1秒前後〜数秒毎にステップ110で自車位置が検出され、ステップ103またはステップ102からの動作が繰り返されて、その繰り替えし毎に、表示画面10では、新たな要約地図に更新されて表示される。
【0063】
なお、この具体例では、図4において、ステップ104の処理後、地図データベース6から地図データを読み出す処理(ステップ105)を行なうようにしたが、ステップ103に続いてこのステップ105の地図データベース6からの地図データの読出し処理を行ない、しかる後、ステップ104の処理に進むようにしてもよい。
【0064】
ところで、この具体例は、要約地図の縮尺率にかかわらず、表示されるオブジェクトの個数や占有面積比率を一定としたが、次に、これらを可変とする他の具体例について、図9により説明する。なお、図9において、ステップ100〜103は図4におけるステップ100〜103と同様であり、また、ステップ107〜ステップ110も図4におけるステップ107〜110と同様である。即ち、図9に示すフローチャートは、図4に示すフローチャートでのステップ104〜106をステップ300〜307と入れ替えたものである。従って、図4に示すフローチャートと重複する部分については説明を省略し、ステップ300〜307の処理動作について説明する。
【0065】
図9において、図4で説明したようにして、表示装置7の表示画面10で表示する地図の表示範囲が決まると(ステップ103)、この表示範囲の地図を表示画面10で表示するための縮尺率α(但し、0<α≦1)を求める(ステップ300)。そして、この縮尺率αに係数k(但し、0<k≦1)を乗算して調整値z(=k・α)を求める(ステップ301)。この係数kは予め設定されているものであって、例えば、先に表1,2で示した表示画面10のサイズなどに応じて決めることができる。この調整値zが表示画面10に表示するオブジェクトの個数を決めるものであるが、表示画面10で表示するオブジェクトの個数が多すぎる場合には、kを小さくし、少な過ぎる場合には、kを大きく設定することができる。
【0066】
この調整値zには、許容最小値zminが設定されており、調整値zがzmin≦zであるときには(ステップ302)、この調整値zが要約度yであり(ステップ303)、z<zminであるときには(ステップ302)、この許容最小値zminを要約度yとする(ステップ304)。例えば、現在地から目的地までの距離が長く、広い領域の地図を大幅に縮小して(縮尺率αが充分小さい)表示する場合、この領域内でのオブジェクトが少ないときがある(即ち、車両が走行して目的地までの距離が変化し、表示する領域が次第に狭くなっていっても、オブジェクトの個数が少ないままでほとんど変化しない場合など)。このような場合に、係数kが小さいと、広い領域の地図を大幅に縮小して(縮尺率αが充分小さい)表示すると、表示するオブジェクトの個数が調整値z=k・αに比例して少なくなり、車両を誘導するに必要な情報が少なくなる。このために、上記のように、許容最小値zminを定め、表示するオプジェクトの個数が距離端に少なくならないようにする。
【0067】
以上のようにして、要約度yが求まると、地図データベース6からステップ103で求めた地図の表示範囲内において、各オブジェクト毎に初期値レイヤーのオブジェクト数を求め、初期値レイヤーのオブジェクト数と要約度yとから表示するオブジェクトの個数を決定する(ステップ305)。例えば、オブジェクト「道路」のこの表示範囲内での初期値レイヤーのオブジェクト数をNとすると、このオブジェクトの表示個数nはn=N・yとなる。
【0068】
しかる後、地図データベース6からステップ103で求めた表示範囲の地図データを読出し、メモリ5に一時格納する(ステップ306)。そして、ステップ305で各オブジェクト毎に決定した表示個数ずつ、地図データベース6から、例えば、設定される優先順位に従って、表示するオブジェクトを決定し(ステップ307)、この決定したオブジェクトについて、ステップ107からの処理を行なう。
【0069】
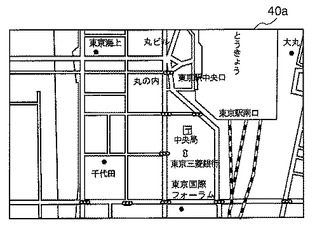
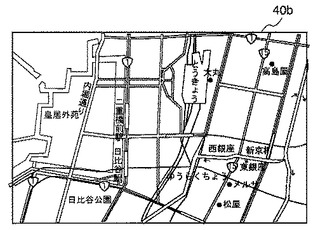
図10Aおよび10Bは図4に示す要約処理による異なる表示範囲でのオブジェクトを示すものであって、図10Aは狭域の要約地図40aを、図10Bは中域の要約地図40bを夫々示している。これら要約地図40a,40bを比較して明らかなように、図4に示す要約処理による場合には、これら要約地図40a,40bに表示されるオブジェクトの個数はほとんど変わりなく、常に一定数に制限されるというメリットがある。
【0070】
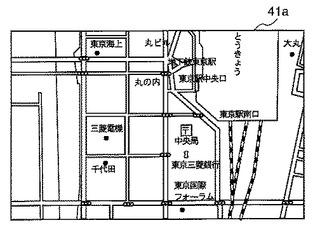
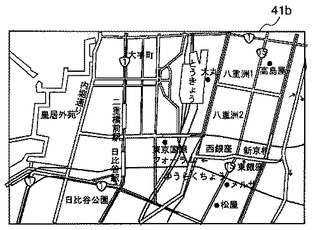
これに対し、図11Aおよび11Bは図9に示す要約処理による異なる表示範囲でのオブジェクトを示すものであって、図11Aは狭域の要約地図41aを、図11Bは中域の要約地図41bを夫々示している。これら要約地図41a,41bを比較して明らかなように、図9に示す要約処理による場合には、中域の要約地図41bの方が、狭域の要約地図41aよりも、表示されるオブジェクトの個数が多くなっている。勿論、表示する範囲での初期とレイヤーのオブジェクト数に応じて、狭域の要約地図41aの方が中域の要約地図41bよりも表示するオブジェクト数が多くなる場合もあるし、これら狭域の要約地図41aと中域の要約地図41bとで表示するオブジェクト数がほぼ等しくなる場合もある。しかし、この図9に示す要約処理においても、表示するオブジェクト数が制限されて、表示画面10に表示される道路地図が非常に見易くなることは、図4に示す要約処理による要約地図の場合と同様であるが、この実施形態では、さらに、各領域のオブジェクトの存在の相対的関係は保存され、周りの様子を把握し易いというメリットがある。
【0071】
以上のように、この表示の具体例では、自車位置と目的地との間の距離に応じて要約地図の縮尺率を変化させるとともに、そこに表示するオブジェクトの個数を変化させるものであったが、さらに、車両の走行速度に応じて表示するオブジェクトの個数を異ならせるようにすることもできる。高速道路を高速に走行する場合と一般道をゆっくりと走行する場合とでは、カーナビゲーション装置の表示画面をみる見方が異なるものであり、高速道路上のような高速走行しているときには、この表示画面を瞬時に見てその内容が判るようにした方がよく、低速走行の場合には、より詳しく状況が把握できるようにした方がよい。このため、高速走行しているときには、図4のステップ105において求めた決定値よりも施設や設備などのオブジェクトの表示個数は少なくし、例えば、上記の優先度の高くて目立ち易いオブジェクトを要約地図に表示するようにする。なお、高速走行中か否かの判定方法としては、車速検出装置3の検出出力から車速を検出し、この車速が予め決められた閾値よりも大きいときには、高速走行と判定し、この閾値以下のときには、低速走行と判定する方法もあるし、また、位置検出装置2で検出される自車位置が高速道路上にあるか否かを地図データベース6に格納されている道路データ40(図8)をもとに判定し、高速道路上にあるときには、高速走行中とし、それ以外のときには、低速走行中とする方法もある。
【0072】
このように、局所的に要約地図を表示する場合には、車両の走行速度に応じてこの要約地図でのオブジェクトの制限表示量を異ならせているものであるから、自車の走行速度に応じて見易く要約された道路地図が提供され、高速走行時でも、直感的に自車の位置関係を把握することができる。さらに、車両の走行速度に応じて局所的に要約地図の縮尺率を異ならせ、表示領域の範囲を異ならせるものであるから、例えば、高速走行時においては、比較的先の状況までも把握することができ、運転がし易いものとなる。さらに、車両が停車した場合には、画面が見易くなるので、オブジェクトの表示制限量を高めてより多くのオブジェクトが表示されるようにしてもよい。この場合、さらに、縮尺率が大きい要約地図あるいは縮尺率α=1の地図(狭域の地図)を表示するようにすることもでき、これにより、自車位置付近の状況をより詳細に把握することを可能にする。
【0073】
また、上記の各実施形態では、要約地図として、自車位置から目的地までの誘導経路全体を含むものとしたが、他の実施形態として、自車位置付近の局所的な要約地図を表示するようにすることもできる(これは、例えば、図3Aおよび3Bで示す平面地図21を要約した要約地図に相当する)。この場合、かかる要約地図の縮尺率は固定されたものとすることもできるが、図3A〜3Bに示す平面地図21と同様、搭乗者の操作に応じて縮尺率を変更できるようにしてもよい。このように縮尺率を変化させると、局所的な要約地図の表示範囲が変化することになるが(縮尺率が小さいほど、広い表示範囲を表わす要約地図が表示されることになる)、このときに表示するオブジェクトの個数(もしくは、占有面積比率)は、縮尺率に関係なく、一定とするが、縮尺率の変化に応じて連続的に、もしくは段階的に切り替えるようにしてもよい。
【0074】
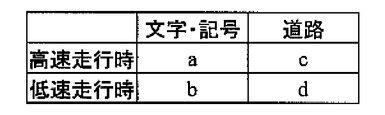
さらに、このような局部的な要約地図の場合も、車両の速度に応じて表示するオブジェクトの個数(もしくは、占有面積比率)を異ならせるようにすることもできる。このためには、図12に示すように、高速走行時での文字,記号(シンボル)の表示個数をa個、道路の表示画面10の背景に対する表示面積の割合をc%とし、低速走行時での文字,記号(シンボル)の表示個数をb個(但し、a<b)、道路の表示画面10の背景に対する表示面積の割合をd%(但し、c<d)というように規定したデータを地図データベース6(図1)に保持しておき、上記のような高速走行,低速走行の判定方法による判定結果に応じて、表示するオブジェクトを異ならせるようにする。また、この場合、高速走行時と低速走行時とで局部的な要約地図の表示範囲を異ならせ、高速走行時では、図13Aに示すように、図13Bに示す低速走行時の要約地図に比べて、より広い領域の要約地図を表示させるようにすることもできる。そして、この場合も、走行速度に応じて、局所的な要約地図の縮尺率を連続的にもしくは段階的に変化させ、走行速度が速いほど広い領域の要約地図を表示するようにすることもできる。これにより、短時間で長い距離を通過してしまう高速走行の場合に、搭乗者としては、比較的遠方までの状況を知ることができる。
【0075】
ここで、要約地図作成のための図4に示す形状加工処理(ステップ108)について説明する。
【0076】
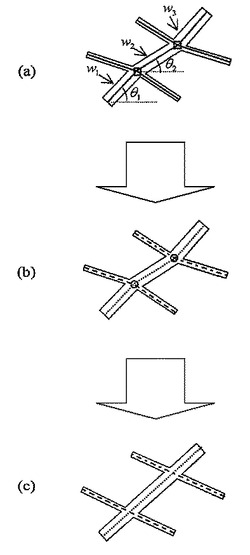
図14は折線図形の直線化処理の一具体例を示す図である。
【0077】
この具体例の直線化処理は、道路や鉄道などの線状の図形を折線によって表わし、さらに、この折線を直線によって近似することによって、地図情報のデータ量を削減するものである。ここでは、道路の直線化処理を例として説明する。
【0078】
道路は、交差点または行き止まり点を両端とする折線として認識される。まず、図14(a)に示すように、折線の各線分w1,w2のX軸に対する傾斜角θ1,θ2を求め、隣接する傾斜角の偏差を算出することによって直線性を検出する。この処理の結果に基づいて、直線性の高いグループ毎に各線分を分類すると、図14(b)に示すように、点線,破線及び一点破線に分けられる。最後に、図14(c)に示すように、各グループの線分を接続して直線化する。
【0079】
図15は折線図形の直線化処理の他の具体例を示す図である。
【0080】
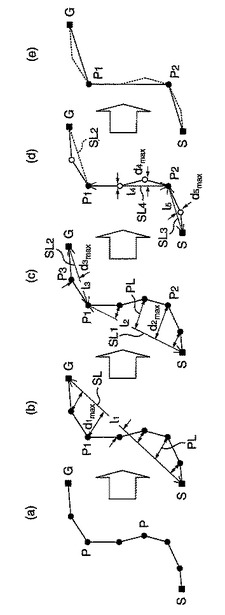
図15(a)は、道路の始点Sと終点Gと節Nとを示す。かかる道路に対し、図15(b)に示すように、始点Sと終点Gを結ぶ直線SLを引き、その長さをL1とする。各節Nからこの直線SLに垂線PLを引き、最長の垂線PLの長さをd1maxとする。次の評価式が成り立つか否かを判定する。
【0081】
F1=d1max/L1<ε1 ……(1)
F2=d1max<ε2 ……(2)
ここに、ε1,ε2は評価関数である。
【0082】
第1の評価関数ε1は、最長の垂線PLの長さと始点S,終点G間の距離との比の閾値であり、スケールに依存しない間引き処理を行なうために使用される。従って、第1の評価関数ε1は、スケールが異なっても、折線の形状が同一であるならば、同一とする。第2の評価関数ε2は、最長の垂線PLの長さの閾値であり、スケール範囲(最大拡大率)が決まっている場合に有効な間引き処理を提供する。微小な凹凸を除去する場合に有効である。
【0083】
上記の評価式(1),(2)が成り立つ場合には、折線を直線SLによって置き換え、この処理を終了する。
【0084】
評価式(1),(2)の少なくともいずれかが成り立たない場合には、図15(c)に示すように、最長の垂線PLとなる節N1と始点S及び終点Gとを結ぶ直線SL1,SL2を引き、さらに、各節Nからこれら2つの直線SL1,SL2に垂線PLを引いて、これら直線SL1,SL2毎の最長の垂線PLの長さ(節N2,N3)を夫々d2max、d3maxとし、これらが上記評価式(1),(2)を満足するか否かを判定する。評価式(1),(2)が成り立つ場合には、節Nを削除し、各折線部分を直線によって置き換える。
【0085】
図14(c)に示す例では、直線SL1が設定された長いほうの折線部分については上記評価式(1),(2)が成り立たないが、直線SL2が設定された短いほうの折線部分については、上記評価式(1),(2)が成り立つものとしている。従って、短いほうの折線部分は、節Nを除去して直線SL2によって置き換える。
【0086】
長いほうの折線部分については、図15(d)に示すように、最長の垂線PLとなる節N2と始点S及び節N1とを結ぶ直線SL3,SL4を引き、これら直線SL3,SL4に対する2つの折線部分に関して、同様の処理を行なう。そして、これらで上記評価式(1),(2)が成り立つ場合には、図15(e)に示すように、節Nを削除して折線部分を直線によって置き換える。
【0087】
図15(a)と図15(e)とを比較すると明らかなように、この具体例によると、多数の節を有する折線は、より少ない節の折線によって置き換えられる。複雑な形状の道路が単純な形状の道路に置き換えられるため、地図情報のデータ量が減少する。
上記記載は実施例についてなされたが、本発明はそれに限らず、本発明の精神と添付の請求の範囲の範囲内で種々の変更および修正をすることができることは当業者に明らかである。
【図面の簡単な説明】
【0088】
【図1】本発明による地図表示方法を用いる車載用ナビゲーション装置を示すブロック構成図である。
【図2A】本発明による地図表示方法の一実施形態を示す図である。
【図2B】本発明による地図表示方法の一実施形態を示す図である。
【図2C】本発明による地図表示方法の一実施形態を示す図である。
【図3A】本発明による地図表示方法の一実施形態を示す図である。
【図3B】本発明による地図表示方法の一実施形態を示す図である。
【図3C】本発明による地図表示方法の一実施形態を示す図である。
【図4】図2A〜2C,図3A〜3Cに示す実施形態での要約地図の表示のための処理動作の一具体例を示す図である。
【図5】図4におけるステップ103での要約地図の表示範囲の設定方法の一具体例を示す図である。
【図6】要約地図でのオブジェクトとしての道路の種類を模式的に示す図である。
【図7】図6に示す道路の種類毎の優先度の設定方法の一具体例を示すフローチャートである。
【図8】図1における地図データベースでの道路データの一具体例を示す図である。
【図9】図2A〜2C,図3A〜3Cに示す実施形態での要約地図の表示のための処理動作の他の具体例を示す図である。
【図10A】図4に示す要約処理による異なる表示範囲の要約地図でのオブジェクトを示す図である。
【図10B】図4に示す要約処理による異なる表示範囲の要約地図でのオブジェクトを示す図である。
【図11A】図9に示す要約処理による異なる表示範囲の要約地図でのオブジェクトを示す図である。
【図11B】図9に示す要約処理による異なる表示範囲の要約地図でのオブジェクトを示す図である。
【図12】図1における地図データベースでの走行速度に応じたオブジェクトの表示量を規制するデータの一具体例を示す図である。
【図13A】本発明による地図表示方法の他の実施形態を示す図である。
【図13B】本発明による地図表示方法の他の実施形態を示す図である。
【図14】図4のステップ108での折線図形の直線化処理の一具体例を示す説明図である。
【図15】図4のステップ108での折線図形の直線化処理の他の具体例を示す説明図である。
【技術分野】
【0001】
本発明は、車両の現在位置を測定し、この現在位置を含む地図とこの地図上にこの車両の現在位置とを表示画面に表示し、この車両の搭乗者を目的地まで誘導する地図表示方法に関する。
【背景技術】
【0002】
従来、搭乗者にとって目的地までの経路を見易くし、目的地まで車両を確実に誘導するようにしたカーナビゲーション装置が提案されている(例えば、特開平7−103779号公報)。
【特許文献1】特開平7−103779号公報
【0003】
この特許文献1に記載のカーナビゲーション装置は、車両の目的地への走行の経過とともに、表示される道路地図の縮尺を変更し、目的地に近づくにつれて表示される道路地図が順次拡大されていくようにするものである。これは、車両の現在位置と目的地との間の直線距離と表示画面の対角線の長さとの比に応じて、常に車両の現在位置が表示画面の1つの角部近傍に表示され、目的地がこの角部とは反対側の対角線上角部近傍に表示されるように、表示する道路地図の縮尺が決められるものである。
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、上記特許文献1に記載のカーナビゲーション装置では、目的地に近づくほど、より詳細な道路地図が表示されるが、目的地からある程度離れたエリアを走行しているときには、そのときの広い領域を表わす道路地図では、道路や施設などを表わすマークが細かく表示され、また、地名や道路名,施設名なども細かく表示されることになり、特に、車両を運転する搭乗者にとっては、非常に見づらいものとなる。このため、かかる道路地図からは、自車がどこを走行中であるのか、把握するのが容易でない場合もある。
【0005】
また、カーナビゲーション装置では、自車位置付近の道路地図を表示することもできるようにしているが、同じ縮尺のかかる道路地図にしても、高速道路でのように、高速に走行している場合と、一般道でのように、高速には走行できない場合とでは、搭乗者の表示される道路地図の見方が異なるものであり、高速走行中では、かかる道路地図を見ても、自車がどこを走行中であるのか、把握するのが容易でない場合もある。
【0006】
本発明の目的は、かかる問題を解消し、車両の走行状況に拘らず、表示される道路地図の内容を容易にかつ明確に把握できるようにした地図表示方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、代表的な本発明は、車両の現在位置を検出し、検出したこの車両の現在位置を表わす自車位置マークと該車両が走行する誘導経路とを含めた道路地図を表示する地図表示方法であって、車両の現在位置から目的地までの誘導経路を表わす要約地図を表示し、この要約地図は、車両の現在位置から目的地までの距離に応じた要約度で要約された地図とするものである。
【0008】
また、この要約地図は、その要約度に応じて、要約地図を構成する道路や表示要素の表示量を異ならせるものである。
【0009】
また、本発明は、車両の現在位置を検出し、検出したこの車両の現在位置を表わす自車位置マークと車両が走行する誘導経路とを含む道路地図を表示する地図表示方法であって、車両の現在位置からの誘導経路を含む局所的な領域を表わす要約地図を表示し、この局所的な要約地図は、車両の走行速度に応じて、要約地図を構成する道路や表示要素の表示量を異ならせるものである。
【0010】
また、この局所的な要約地図は、車両の走行速度に応じて表示領域の範囲が変化するものである。
【発明の効果】
【0011】
本発明によれば、平面地図に対して簡略化して走行経路が表わされる要約地図を表示させることができ、しかも、自車と目的地との間の距離に応じて要約地図の縮尺率を変化させて表示領域の範囲を異ならせるものであるが、自車が誘導経路上のどの位置にあっても、要約地図が見易いものとなり、直感的に自車の位置関係を把握することができる。
【0012】
また、要約地図でのオブジェクトの表示量が自車と目的地との間の距離に応じて変わるようにしているから、自車が誘導経路上のどの位置にあっても、要約地図がさらに見易いものとなる。
本発明の他の目的、特徴及び利点は添付図面に関する以下の本発明の実施例の記載から明らかになるであろう。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施形態を図面を用いて説明する。
図1は本発明による地図表示方法の一実施形態のためのカーナビゲーション装置を示すブロック構成図であって、1は制御装置、2は位置検出装置、3は車速検出装置、4は通信装置、5はメモリ、6は地図データベース、7は表示装置、8は音声入出力装置、9は入力装置である。
【0014】
同図において、地図データベース6には、各地域の地図データが格納されており、かかる地図データは通信装置4を介して外部から一旦メモリ5にダウンロードされる。メモリ5に記憶された地図データは、制御装置1の制御のもとに、地図データベース6に格納される。ここでは、最初から全国の地図データを格納しておく必要がなく、このカーナビゲーション装置を搭載した車両(以下、自車両という)が移動する地域の地図データがないときには、通信装置4を介してサーバ(図示せず)にこの地域の地図データを要求し、このサーバから配信して貰うようにすることができる。勿論、予め全地図データを地図データベース6に格納しておくこともできる。
【0015】
地図データベース6には、地図データの構成要素としての道路データと表示要素のデータとが格納されており、地図データベース6からかかる構成要素のデータを読み出して組み合わせることにより、道路地図データが得られ、これによって表示装置7の表示画面に道路地図が表示される。ここで、表示要素は、鉄道や学校,コンビニエンスストア,橋などといった施設、信号機などの設備などに関する要素(これらを表わす記号や名称など)である。
【0016】
位置検出装置2は、例えば、GPS(Global Positioning System)などの自車両の位置を検出する装置であり、また、車速検出装置3は、自車両の移動速度を検出する装置である。位置検出装置2では、所定の周期で自車両の位置(以下、自車位置という)が検出され、この位置検出装置2の位置検出タイミングの間の位置検出がこの車速検出装置3の検出結果に基づいて行なわれる。
【0017】
入力装置9は搭乗者が操作する機械的なスイッチ手段や表示装置7の表示画面に表示されるタッチスイッチなどからなるものであって、搭乗者はこの入力装置9を操作することにより、カーナビゲーション装置に所望の動作をさせる指令を入力する。
【0018】
制御装置1は、入力装置9からのかかる指令に基づいてナビゲーションのための各部の制御を行なうものであって、位置検出装置2からの位置情報と車速検出装置3からの車速情報とに基づく自車位置に応じた道路地図データを地図データベース6から読み取り、これに現在の自車位置を示すマーク(即ち、自車位置マーク)を付加して表示装置7に表示させる。この実施形態では、道路地図データの表示装置7での表示形態として、説明を省略するが、道路地図を通常の2次元的に表示する平面表示や2次元の道路地図を高い視点から眺めたように表示する鳥瞰表示,鳥瞰表示で、さらに、建物などの3次元形状のものや地面の隆起などが立体的に表示するようにした立体表示が可能であるが、さらに、後述するように、2次元の道路地図から必要な情報を取捨選択し、道路などを形状加工することにより単純化して表示する要約表示もあるし、以上の表示形態の何れかを組み合わせて表示する2画面表示も可能である。平面表示以外の表示形態で道路地図を表示する場合には、制御装置1は地図データベース6から読み取った道路地図データを加工し、表示装置7で表示させる。
【0019】
なお、音声入出力装置8は、表示装置7の表示画面で表示される道路地図での自車両の誘導に連動して音声案内などを出力するスピーカや、ディスクなどの記録媒体の再生装置などからなるものである。
【0020】
次に、この実施形態の表示形態について説明する。
【0021】
図2A〜2Cは本発明による地図表示方法の一実施形態を示すものであって、自車位置から目的地までの距離に応じた要約地図を示しており、10は表示装置7の表示画面、11は自車位置、12は自車の誘導経路、13は目的地、14は誘導経路12以外の道路、15は施設の記号、16は道路や施設などの名称である。
【0022】
この実施形態での要約地図は、現在の自車位置から目的地までの領域を要約して表示したものであり、自車位置75相的地に近づくにつれて縮尺率が大きくなり、表示装置7の表示画面に表示する地図の領域が狭くなっていくものである。
【0023】
ここで、「縮尺率」とは、かかる表示画面に地図を表示するときのこの地図が縮尺される度合いを表わすものである。例えば、表示装置7の表示画面に縮尺されないで表示される地図に対する縮尺率を1とし、これより広い領域の地図をこの表示画面に表示するときには、この地図を表示画面の大きさに縮小しなければならないが、このときの縮尺率は1よりも小さい。例えば、縮尺率α=1の地図の4倍の領域の地図を表示画面に表示する場合には、この領域の地図は1/4倍に縮小されて表示されることになるが、このとき、縮尺率α=1/4である。
【0024】
また、要約地図での道路や表示要素は、自車位置から目的地までの距離が長くて広い領域が表示されるほど、制限されるものである。即ち、要約地図は、その縮尺率が変化しても、道路や表示要素を見易くするものである。このため、表示される同じ道路や同じ表示要素が、縮尺率が異なっても、同じような大きさで表示されるようにするし、表示要素同士も重なり合わないようにする。そして、このように道路や表示要素を表示するためには、地図の縮尺率によっては、これら道路や表示要素の表示する量を制限し、かつ見易くするための加工が必要となる。このように制限量や加工の度合いが、要約地図をどの程度要約するかという要約の度合い、即ち、要約度によって決まるものである。
【0025】
例えば、いま、縮尺率α=1の地図(以下、基準地図という)に対し、その4倍のこの基準地図の領域を含む領域の地図(縮尺率α=1/4)をそのまま1/4倍に縮小して表示する場合、道路も、また、表示要素も縮小されて表示され、非常に見づらいものである。このため、道路も表示要素も、例えば、1/4に間引いてその表示量を減らし、かつ間引き後の表示される道路や表示要素を拡大加工して重ならないようにすることにより、これらが見易くなるようにしたものが要約地図であるが、このような道路や表示要素の間引きや加工の度合いがこの要約地図の要約度によって決まるのである。
【0026】
図2A〜2Cは表示装置7(図1)の表示画面10に表示される要約地図の例を示すものである。かかる要約地図では、道路14や施設の記号15,地名や施設名(名称16)などを表わす文字などが表示されるとともに、現在の自車位置11を示す△印のマーク(自車位置マーク)や目的地13を示す星印のマーク(目的地マーク),自車位置から目的地までの自車の誘導経路12などが表示される。
【0027】
この実施形態では、要約地図が、現在の自車位置から目的地までの誘導経路を含むように、表示画面10に表示されるものであり、このため、現在の自車位置から目的地までの距離に応じて要約地図の縮尺率が変化し、表示される領域の大きさが変化する。
【0028】
図2Aは現在の自車位置から目的地までの距離が長い場合の要約地図を示すものであって、この場合には、縮尺率が小さく、広い領域が要約されて表示される。この広域の要約地図では、誘導経路12とともに、主要な道路14や鉄道17,河川,主要な施設の記号15、それに、これらの名称16など、車両を運転する搭乗者にとって目印として判り易いものであって、かつ要約地図上では、煩雑せずに見易いように、その道路や表示要素が制限され、加工される。
【0029】
これら道路や表示要素も、現在の自車位置から目的地までの距離が短くなっていき、縮尺率が大きくなっていって要約地図が表わす領域が狭くなるとともに、表示量の制限も緩くなっていき、例えば、図2Bに示すように、中域の要約地図になると、誘導経路12に交差する道路14aも表示されるようになる。
【0030】
さらに、車両が誘導されて目的地13に近くなると、図2Cに示すように、狭域の道路地図が表示される。この狭域の道路地図は、縮尺率α=1の地図である場合、要約されておらず、誘導経路12とともに、全ての道路や表示要素が表示される。この場合、これら道路は全て、その幅や長さ,形状(曲がり具合など)が通常の道路地図と同様にして、リアルに表示される。また、この要約地図に表示される施設やその名称などの表示要素も多くなり、目的地13を探し出し易くする。
【0031】
なお、縮尺率α=1の地図は、地図データベース6(図1)から表示装置7の表示画面に表示可能な領域をそのまま切り出して得られる地図データによるものであるが、この場合も、道路や表示要素を適宜制限、加工したものであってもよい。
【0032】
また、以上の一連の要約地図は、車両の走行に伴う自車位置11と目的地13との間の距離が変化するとともに、縮尺率が次第に大きくなって表示領域が狭くなり、要約地図が拡大表示されていくことになる。この場合、位置検出装置2や車速検出装置3(図1)により、1秒前後〜数秒間隔で自車位置の検出が行なわれ、この検出結果に基づいて、要約地図が作成される。従って、この場合には、かかる時間間隔毎に要約地図の縮尺率が変化し、表示領域が狭くなっていて要約道路地図が表示画面10に順次拡大表示されていくことになる。
【0033】
図3A〜3Cは本発明による地図表示方法の他の実施形態を示す図であって、2画面表示の例を示すものであり、20は要約地図、21は平面地図、22は信号機である。なお、図2A〜2Cに対応する部分には同一符号を付けて重複する説明を省略する。
【0034】
図3Aは自車位置11から目的地13までの距離が長い場合(遠距離にある場合)の2画面表示を示すものである。表示装置7(図1)には、表示画面10とともに、「2画面」ボタン25,「自車位置」ボタン26,「縮尺」ボタン27,「全経路」ボタン28といった操作手段が設けられており、「2画面」ボタン25を操作することにより、表示画面10の、例えば、左半分に要約地図20が、右半分に平面地図21が表示される。要約地図20の構成要素(道路と表示要素)は図2A〜2Cに示す要約地図と同様であるが、「自車位置」ボタン26を操作することにより、自車位置付近の要約地図が表示される。
【0035】
平面地図21は、通常の道路地図であるが、「全経路」ボタン28を操作することにより、現在の自車位置11から目的地13までの全経路の平面地図21が表示される。また、このときの縮尺率を最小縮尺率として、「縮尺」ボタン27を操作することにより、平面地図21の縮尺率を変更することができ、これにより、縮尺率が大きくなるほど、平面地図21として表示される領域が狭くなってより拡大表示される。但し、表示される平面地図21は、必ず現在の自車位置11を含む領域のものであり、これにより、自車位置付近の状況を詳細に知ることができる。
【0036】
車両が走行し、車両11が目的地13に近づいてきて目的地13から中距離の位置になると、図3Bに示すように、要約地図20では、図2Bに示す要約地図10と同様、図3Aに示す要約地図20では表示されなかった道路や表示要素が新たに表示されるようになる。これに対し、平面地図21は、「縮尺」ボタン27や「全経路」ボタン28が操作されない限り、同じ縮尺率で表示される。但し、車両の走行とともに、表示される領域が移っていく。
【0037】
そして、自車位置11が目的地13から予め決められた所定の距離の範囲内に近づくと、図3Cに示すように、自車位置11から目的地13までを含む平面地図21のみを表示する1画面表示に移る。
【0038】
このように、かかる要約地図とともに、自車位置近辺の局所的な平面地図も同時に2画面表示で表示することができ、しかも、平面地図の縮尺率を可変とするものであるから、要約地図で目的地までの自車位置を概略的に把握できるとともに、局所的な平面地図を表示させることにより、現在の自車位置付近の状況を詳しく把握することもでき、装置の誘導に従う運転がよりスムーズに行なうことができるようになる。
【0039】
なお、上記のように、平面地図に代えて鳥瞰表示または立体表示との組み合わせにすることもできる。この場合には、自車位置周辺については、より現実の視野に沿った情報を提供できる。また、メニューバーに画面切替えのボタンを設け、表示を切り替えることができるようにしてもよい。
【0040】
ここで、図4により、図1における制御装置1による要約地図の表示のための動作の一具体例について説明する。
【0041】
同図において、まず、図示しない電源スイッチが投入されると、位置検出装置2の検出出力により、自車位置を測定する(ステップ100)。そして、入力装置9から目的地が入力されると(ステップ101)、地図データベース6での道路や表示要素のデータからなる地図データを用いて自車位置から目的地までの経路(誘導経路)を検索する(ステップ102)。そして、自車位置と目的地と検索した誘導経路とから、表示装置7の表示画面10で表示するこれらを含む表示範囲を決定する(ステップ103)。
【0042】
この表示範囲の決定方法の一具体例を図5で説明する。
【0043】
同図において、いま、位置検出装置2の検出出力で得られた自車位置情報と入力装置9から入力された目的地情報とからこれらを含む地図データ30が地図データベース6で検索され、この地図データ30上で自車位置11と目的地13とが決定されて、所定の条件のもとに自車位置11から目的地13までの誘導経路12が検索される。そして、これら自車位置11と目的地13と誘導経路12とのうちの最も東側の位置を通る南北に延びる直線32aと、最も北側の位置を通る東西に延びる直線32bと、最も西側の位置を通る南北に延びる直線32cと、最も南側の位置を通る東西に延びる直線32dとを4つの辺とする正方形、もしくは矩形状の領域を検出して経路領域31とし、さらに、かかる経路領域31を含む縦横比が表示装置7の表示画面10のアスペクト比に等しい地図表示領域33とする。図4のステップ103により、この地図表示領域33が表示範囲として決定される。
【0044】
一方、表示装置7の画面のサイズに応じて、オブジェクト(文字/シンボルなどの表示要素と道路)の種類毎に表示の制限量を決めるテーブルが設定されている。かかる制限量としては、個数で設定されていてもよいし、また、表示画面10の面積に対する占有面積比率(=表示要素の占有面積総数(ピクセル数)/表示画面10の面積(ピクセル数))で設定されていてもよい。次の表1は、文字/シンボルと道路とに対し、表示制限量を個数(本数)で表わしたテーブルの例を示すものであり、表2は、同じく占有面積比率で表わしたものである。
【表1】
【表2】
例えば、図面サイズが6インチの表示画面の場合、文字/シンボルは最大30個(もしくは、最大占有面積比率20%で)表示できるものであり、道路は最大50本(もしくは、最大占有面積比率30%で)表示できるものである。
【0045】
図4に戻って、このようにして表示範囲が決定されると(ステップ103)、上記のテーブルから各オブジェクト(地図の構成要素である道路や表示要素)の上記表1や表2に示すような表示制限量を読み取り(ステップ104)、また、地図データベース6から表示範囲(即ち、図5で説明したようにして決定した地図表示領域33)の地図データが読み出されてメモリ5に一時格納される(ステップ105)。
【0046】
この地図データは、上記のように、オブジェクトのデータからなり、地図データベース6から読み出したオブジェクトの種別毎の個数を求め(この種別毎の個数を初期値レイヤーのオブジェクト数という)、この初期値レイヤーのオブジェクト数とステップ104で得た表示制限量とを比較し、実際に表示する要約地図でのオブジェクトの種別毎の表示個数が最大この表示制限値となるように調整して、初期値レイヤーのオブジェクトの中から実際に表示する道路や表示要素を決定する(ステップ106)。
【0047】
ここで、この具体例では、上記の表1や表2で示される表示制限量にオブジェクトの表示量が制限されるのであるが、この表示制限量により、要約地図の縮尺率に応じてこの要約地図の要約の度合い、即ち、要約度が異なってくる。
【0048】
即ち、いま、縮尺率α1で要約地図を表示する場合、この要約地図を表示するために地図データベース6から読み取るあるオブジェクト「道路」の個数(初期値レイヤーのオブジェクト数)をn1とし、このオブジェクトに対する表示制限量がM(例えば、表1での画面サイズに対する「50本」)と設定されているものとすると、この要約地図では、本来道路がn1個あるのに、そのうちのM個しか表示されないことになり、この要約地図は、オブジェクト「道路」に対し、このように要約されていることになる。そして、この要約地図での表示される道路の割合y1は、y1=M/n1となり、これがこの要約地図の要約の度合い、即ち、要約度を表わしていることになる。
また、縮尺率α2(<α1)で要約地図を表示する場合、これに対して地図データベース6から読み取るオブジェクト「道路」の初期値レイヤーのオブジェクト数をn2(但し、α2<α1であるから、縮尺率α1で要約地図よりも広い領域の要約地図であるから、n2>n1である)とすると、この要約地図に対する要約度y2は、y2=M/n2である。従って、y1>y2であるから、要約地図の縮尺率αに応じて、要約地図の要約度yは異なることになる。
【0049】
また、換言すれば、要約地図は、かかる要約度yに応じて表示するオブジェクトの量が制限されることにより、要約されているものであり、要約度に応じた要約がなされていることになる。
【0050】
この初期値レイヤーのオブジェクトの中から実際に表示するオブジェクトを決定する一方法として、種別毎にその種別の種類に優先度を設定し、優先度が高い順から上記決定値に等しい個数を選択する方法がある。次に、これを、道路データを例にして、図6〜図8により説明する。
【0051】
ここでは、要約地図で表示するオブジェクト「道路」として、例えば、図6に示すように、誘導経路12となる道路、高速道路や国道,県道といった主要道路14a、誘導経路12に枝葉状に接続される経路枝葉道路14b、例えは、観光などのために名称が付けられた名称付きの道路14c、経路枝葉道路に直進して接続される直進接続道路14d、その他の道路といった種類に区分されるものとし、夫々の種類毎に優先度が設定されている。
【0052】
図4でのステップ106で実際に表示するオブジェクト「道路」を設定するに当たっては、上記の種別「道路」の種類毎に設定されている優先度が使用されるが、かかる優先度の一例を図7で説明すると、まず、誘導経路12となる道路に優先度p1が設定され(ステップ200)、主要道路14aに優先度p2が設定され(ステップ201)、経路枝葉道路14bに優先度p3が設定され(ステップ202)、名称付き道路14cに優先度p4が設定され(ステップ203)、経路枝葉道路の直進接続道路14dに優先度p5が設定されており(ステップ204)、以上以外の道路には優先度が設定されていない。
【0053】
図8は以上のように優先度が設定された道路データを示す図である。
【0054】
同図において、道路データは、この道路データを識別するためのID(Identification)41、オブジェクトの種別が「道路」であることを表わすレイヤ42、道路の種類(図7に示すように、経路道路,主要道路,……などをいったもの)を表わすカテゴリ43、道路の表示の際の図形の形状を表わす図形種別45、表示要素の名称46とからなり、上記のように優先度が付加されたときには、優先度47が設けられる。
【0055】
ここでは、道路データを例にしており、この場合の種別はレイヤ「100」で表わされるものとしている。カテゴリは、図6を参照して、オブジェクト「道路」での種類が誘導経路12である場合には「500」とし、主要道路14aの場合には「400」、名称付き道路14cの場合には「200」としており、道路の他の種類も、その種類に応じたカテゴリが設定されている。図形種別44は、ここでは、「polyline」として多数の直線からなる折線であることを示しており、例えば、多角形の場合には、「polygon」などと表わされる。図形データ45は道路の存在位置を緯度,経度(あるいは直交座標系上の縦軸,横軸成分)で表わするものであり、例えば、道路の場合には、その構成点列座標で表わす。また、道路に名称がある場合(例えば、○○自動車道,国道××号,△△ラインといったようなもの)には、その名称46が付される。
【0056】
なお、図8に示すデータの全てが必須のものというものではないが、レイヤ42とカテゴリ43は、これらのうちの少なくとも1つが種別を特定するのに必要である。図形種別44と図形データ45は図形の種別(点、折線、多角形など)の分類、図形のデータを表わしており、同様の内容を表現できていれば、1つにまとめた項目で記載するようにしてもよい。名称46は、現在走行中の道路やこれに交差する道路などの名称を表示するため、必須のものである。優先度47は、地図データベース6(図1)の整備時に定まるものについては、付加しておく。このようにすると、図7で示す優先度の設定処理が簡略化できる。
【0057】
図4に戻って、道路データの場合、ステップ104で求める決定値としては、表示画面10に対する道路の総表示面積の割合(%)としてもよい。ステップ106では、この決定値に合うように調整しながら、表示する道路の優先度の限界を決める(ステップ106)。この場合、「調整」とは、優先度を下位側に1つ進めると、この優先度までの道路の本数、もしくは表示画面10に占める面積(ピクセル数)を計算し、この面積と表示画面10の面積との割合(%)を求め、かかる本数もしくは占有面積比率と表示制限量とを比較して表示制限量を越えたか否かを判定し、越えない場合には、さらに1つ下位の優先度に進めて表示する道路の本数もしくは占有面積を増やし、越えた場合には、そのときの最下位の優先度の道路を減らしていくものである。あるいはまた、地図データベース6から読み出した道路データのうち、最下位の優先度のものから順に除いていって表示制限量に合うようにする。
【0058】
なお、ステップ106では、経路道路や交差道路などの状況に応じて道路の優先度を変更し、表示する道路を調整するようにすることもできる。
【0059】
また、図4のステップ104では、各オブジェクトの表示制限量を表示画面10のサイズ(表1)や占有面積比率(表2)で一意的に決めるようにしたが、地図データベース6を、例えば、図2A〜2Cに示した広域,中域,狭域のように、縮尺率を区分して夫々の区分毎に設け、これら地図データベース毎に各オブジェクトの表示制限量を設定し(要するに、地図データを広域,中域,狭域夫々の地図データに区分し、夫々毎に各オブジェクトの表示制限量を設定し)、表示する道路地図の縮尺率に応じてオブジェクトの表示制限量を異ならせるようにすることができる。勿論、この場合、かかる縮尺率の区分内においても、上記の表1や表2に示すようなサイズなどに応じて表示制限量を設定するようにして、表示画面10のサイズに応じても、表示制限量を異ならせるようにしてもよい。
【0060】
このようにして、表示するオブジェクトが決まると、次に、後述するようにして、そのオブジェクト、即ち、道路や表示要素の形状(道路の太さや文字シンボルの大きさなど)を加工するデータ処理を行ない、さらに、加工された道路上に加工された表示要素を、これら表示要素が互いに重ならないように、配置するためのデータ処理を行なう(ステップ107)。そして、図2A〜2C,図3A〜3Cに示すように、形状加工した表示要素による要約地図を、図2A〜2C,図3A〜3Cに示すように、表示装置7の表示画面10に表示する(ステップ108)。
【0061】
次いで、自車位置11の測定を行ない(ステップ109)、自車が誘導経路12上にあるか否かを判定し(ステップ110)、誘導経路12上にあるときには、測定した自車位置11と目的地13とから表示範囲を決定し(ステップ103)、この決定した表示範囲に対し、ステップ104からの動作を繰り返し、自車が誘導経路12上にないときには(即ち、経路を変更した場合には)、新たな誘導経路を検索し(ステップ102)、ステップ103からの動作を繰り返す。
【0062】
このようにして、例えば、1秒前後〜数秒毎にステップ110で自車位置が検出され、ステップ103またはステップ102からの動作が繰り返されて、その繰り替えし毎に、表示画面10では、新たな要約地図に更新されて表示される。
【0063】
なお、この具体例では、図4において、ステップ104の処理後、地図データベース6から地図データを読み出す処理(ステップ105)を行なうようにしたが、ステップ103に続いてこのステップ105の地図データベース6からの地図データの読出し処理を行ない、しかる後、ステップ104の処理に進むようにしてもよい。
【0064】
ところで、この具体例は、要約地図の縮尺率にかかわらず、表示されるオブジェクトの個数や占有面積比率を一定としたが、次に、これらを可変とする他の具体例について、図9により説明する。なお、図9において、ステップ100〜103は図4におけるステップ100〜103と同様であり、また、ステップ107〜ステップ110も図4におけるステップ107〜110と同様である。即ち、図9に示すフローチャートは、図4に示すフローチャートでのステップ104〜106をステップ300〜307と入れ替えたものである。従って、図4に示すフローチャートと重複する部分については説明を省略し、ステップ300〜307の処理動作について説明する。
【0065】
図9において、図4で説明したようにして、表示装置7の表示画面10で表示する地図の表示範囲が決まると(ステップ103)、この表示範囲の地図を表示画面10で表示するための縮尺率α(但し、0<α≦1)を求める(ステップ300)。そして、この縮尺率αに係数k(但し、0<k≦1)を乗算して調整値z(=k・α)を求める(ステップ301)。この係数kは予め設定されているものであって、例えば、先に表1,2で示した表示画面10のサイズなどに応じて決めることができる。この調整値zが表示画面10に表示するオブジェクトの個数を決めるものであるが、表示画面10で表示するオブジェクトの個数が多すぎる場合には、kを小さくし、少な過ぎる場合には、kを大きく設定することができる。
【0066】
この調整値zには、許容最小値zminが設定されており、調整値zがzmin≦zであるときには(ステップ302)、この調整値zが要約度yであり(ステップ303)、z<zminであるときには(ステップ302)、この許容最小値zminを要約度yとする(ステップ304)。例えば、現在地から目的地までの距離が長く、広い領域の地図を大幅に縮小して(縮尺率αが充分小さい)表示する場合、この領域内でのオブジェクトが少ないときがある(即ち、車両が走行して目的地までの距離が変化し、表示する領域が次第に狭くなっていっても、オブジェクトの個数が少ないままでほとんど変化しない場合など)。このような場合に、係数kが小さいと、広い領域の地図を大幅に縮小して(縮尺率αが充分小さい)表示すると、表示するオブジェクトの個数が調整値z=k・αに比例して少なくなり、車両を誘導するに必要な情報が少なくなる。このために、上記のように、許容最小値zminを定め、表示するオプジェクトの個数が距離端に少なくならないようにする。
【0067】
以上のようにして、要約度yが求まると、地図データベース6からステップ103で求めた地図の表示範囲内において、各オブジェクト毎に初期値レイヤーのオブジェクト数を求め、初期値レイヤーのオブジェクト数と要約度yとから表示するオブジェクトの個数を決定する(ステップ305)。例えば、オブジェクト「道路」のこの表示範囲内での初期値レイヤーのオブジェクト数をNとすると、このオブジェクトの表示個数nはn=N・yとなる。
【0068】
しかる後、地図データベース6からステップ103で求めた表示範囲の地図データを読出し、メモリ5に一時格納する(ステップ306)。そして、ステップ305で各オブジェクト毎に決定した表示個数ずつ、地図データベース6から、例えば、設定される優先順位に従って、表示するオブジェクトを決定し(ステップ307)、この決定したオブジェクトについて、ステップ107からの処理を行なう。
【0069】
図10Aおよび10Bは図4に示す要約処理による異なる表示範囲でのオブジェクトを示すものであって、図10Aは狭域の要約地図40aを、図10Bは中域の要約地図40bを夫々示している。これら要約地図40a,40bを比較して明らかなように、図4に示す要約処理による場合には、これら要約地図40a,40bに表示されるオブジェクトの個数はほとんど変わりなく、常に一定数に制限されるというメリットがある。
【0070】
これに対し、図11Aおよび11Bは図9に示す要約処理による異なる表示範囲でのオブジェクトを示すものであって、図11Aは狭域の要約地図41aを、図11Bは中域の要約地図41bを夫々示している。これら要約地図41a,41bを比較して明らかなように、図9に示す要約処理による場合には、中域の要約地図41bの方が、狭域の要約地図41aよりも、表示されるオブジェクトの個数が多くなっている。勿論、表示する範囲での初期とレイヤーのオブジェクト数に応じて、狭域の要約地図41aの方が中域の要約地図41bよりも表示するオブジェクト数が多くなる場合もあるし、これら狭域の要約地図41aと中域の要約地図41bとで表示するオブジェクト数がほぼ等しくなる場合もある。しかし、この図9に示す要約処理においても、表示するオブジェクト数が制限されて、表示画面10に表示される道路地図が非常に見易くなることは、図4に示す要約処理による要約地図の場合と同様であるが、この実施形態では、さらに、各領域のオブジェクトの存在の相対的関係は保存され、周りの様子を把握し易いというメリットがある。
【0071】
以上のように、この表示の具体例では、自車位置と目的地との間の距離に応じて要約地図の縮尺率を変化させるとともに、そこに表示するオブジェクトの個数を変化させるものであったが、さらに、車両の走行速度に応じて表示するオブジェクトの個数を異ならせるようにすることもできる。高速道路を高速に走行する場合と一般道をゆっくりと走行する場合とでは、カーナビゲーション装置の表示画面をみる見方が異なるものであり、高速道路上のような高速走行しているときには、この表示画面を瞬時に見てその内容が判るようにした方がよく、低速走行の場合には、より詳しく状況が把握できるようにした方がよい。このため、高速走行しているときには、図4のステップ105において求めた決定値よりも施設や設備などのオブジェクトの表示個数は少なくし、例えば、上記の優先度の高くて目立ち易いオブジェクトを要約地図に表示するようにする。なお、高速走行中か否かの判定方法としては、車速検出装置3の検出出力から車速を検出し、この車速が予め決められた閾値よりも大きいときには、高速走行と判定し、この閾値以下のときには、低速走行と判定する方法もあるし、また、位置検出装置2で検出される自車位置が高速道路上にあるか否かを地図データベース6に格納されている道路データ40(図8)をもとに判定し、高速道路上にあるときには、高速走行中とし、それ以外のときには、低速走行中とする方法もある。
【0072】
このように、局所的に要約地図を表示する場合には、車両の走行速度に応じてこの要約地図でのオブジェクトの制限表示量を異ならせているものであるから、自車の走行速度に応じて見易く要約された道路地図が提供され、高速走行時でも、直感的に自車の位置関係を把握することができる。さらに、車両の走行速度に応じて局所的に要約地図の縮尺率を異ならせ、表示領域の範囲を異ならせるものであるから、例えば、高速走行時においては、比較的先の状況までも把握することができ、運転がし易いものとなる。さらに、車両が停車した場合には、画面が見易くなるので、オブジェクトの表示制限量を高めてより多くのオブジェクトが表示されるようにしてもよい。この場合、さらに、縮尺率が大きい要約地図あるいは縮尺率α=1の地図(狭域の地図)を表示するようにすることもでき、これにより、自車位置付近の状況をより詳細に把握することを可能にする。
【0073】
また、上記の各実施形態では、要約地図として、自車位置から目的地までの誘導経路全体を含むものとしたが、他の実施形態として、自車位置付近の局所的な要約地図を表示するようにすることもできる(これは、例えば、図3Aおよび3Bで示す平面地図21を要約した要約地図に相当する)。この場合、かかる要約地図の縮尺率は固定されたものとすることもできるが、図3A〜3Bに示す平面地図21と同様、搭乗者の操作に応じて縮尺率を変更できるようにしてもよい。このように縮尺率を変化させると、局所的な要約地図の表示範囲が変化することになるが(縮尺率が小さいほど、広い表示範囲を表わす要約地図が表示されることになる)、このときに表示するオブジェクトの個数(もしくは、占有面積比率)は、縮尺率に関係なく、一定とするが、縮尺率の変化に応じて連続的に、もしくは段階的に切り替えるようにしてもよい。
【0074】
さらに、このような局部的な要約地図の場合も、車両の速度に応じて表示するオブジェクトの個数(もしくは、占有面積比率)を異ならせるようにすることもできる。このためには、図12に示すように、高速走行時での文字,記号(シンボル)の表示個数をa個、道路の表示画面10の背景に対する表示面積の割合をc%とし、低速走行時での文字,記号(シンボル)の表示個数をb個(但し、a<b)、道路の表示画面10の背景に対する表示面積の割合をd%(但し、c<d)というように規定したデータを地図データベース6(図1)に保持しておき、上記のような高速走行,低速走行の判定方法による判定結果に応じて、表示するオブジェクトを異ならせるようにする。また、この場合、高速走行時と低速走行時とで局部的な要約地図の表示範囲を異ならせ、高速走行時では、図13Aに示すように、図13Bに示す低速走行時の要約地図に比べて、より広い領域の要約地図を表示させるようにすることもできる。そして、この場合も、走行速度に応じて、局所的な要約地図の縮尺率を連続的にもしくは段階的に変化させ、走行速度が速いほど広い領域の要約地図を表示するようにすることもできる。これにより、短時間で長い距離を通過してしまう高速走行の場合に、搭乗者としては、比較的遠方までの状況を知ることができる。
【0075】
ここで、要約地図作成のための図4に示す形状加工処理(ステップ108)について説明する。
【0076】
図14は折線図形の直線化処理の一具体例を示す図である。
【0077】
この具体例の直線化処理は、道路や鉄道などの線状の図形を折線によって表わし、さらに、この折線を直線によって近似することによって、地図情報のデータ量を削減するものである。ここでは、道路の直線化処理を例として説明する。
【0078】
道路は、交差点または行き止まり点を両端とする折線として認識される。まず、図14(a)に示すように、折線の各線分w1,w2のX軸に対する傾斜角θ1,θ2を求め、隣接する傾斜角の偏差を算出することによって直線性を検出する。この処理の結果に基づいて、直線性の高いグループ毎に各線分を分類すると、図14(b)に示すように、点線,破線及び一点破線に分けられる。最後に、図14(c)に示すように、各グループの線分を接続して直線化する。
【0079】
図15は折線図形の直線化処理の他の具体例を示す図である。
【0080】
図15(a)は、道路の始点Sと終点Gと節Nとを示す。かかる道路に対し、図15(b)に示すように、始点Sと終点Gを結ぶ直線SLを引き、その長さをL1とする。各節Nからこの直線SLに垂線PLを引き、最長の垂線PLの長さをd1maxとする。次の評価式が成り立つか否かを判定する。
【0081】
F1=d1max/L1<ε1 ……(1)
F2=d1max<ε2 ……(2)
ここに、ε1,ε2は評価関数である。
【0082】
第1の評価関数ε1は、最長の垂線PLの長さと始点S,終点G間の距離との比の閾値であり、スケールに依存しない間引き処理を行なうために使用される。従って、第1の評価関数ε1は、スケールが異なっても、折線の形状が同一であるならば、同一とする。第2の評価関数ε2は、最長の垂線PLの長さの閾値であり、スケール範囲(最大拡大率)が決まっている場合に有効な間引き処理を提供する。微小な凹凸を除去する場合に有効である。
【0083】
上記の評価式(1),(2)が成り立つ場合には、折線を直線SLによって置き換え、この処理を終了する。
【0084】
評価式(1),(2)の少なくともいずれかが成り立たない場合には、図15(c)に示すように、最長の垂線PLとなる節N1と始点S及び終点Gとを結ぶ直線SL1,SL2を引き、さらに、各節Nからこれら2つの直線SL1,SL2に垂線PLを引いて、これら直線SL1,SL2毎の最長の垂線PLの長さ(節N2,N3)を夫々d2max、d3maxとし、これらが上記評価式(1),(2)を満足するか否かを判定する。評価式(1),(2)が成り立つ場合には、節Nを削除し、各折線部分を直線によって置き換える。
【0085】
図14(c)に示す例では、直線SL1が設定された長いほうの折線部分については上記評価式(1),(2)が成り立たないが、直線SL2が設定された短いほうの折線部分については、上記評価式(1),(2)が成り立つものとしている。従って、短いほうの折線部分は、節Nを除去して直線SL2によって置き換える。
【0086】
長いほうの折線部分については、図15(d)に示すように、最長の垂線PLとなる節N2と始点S及び節N1とを結ぶ直線SL3,SL4を引き、これら直線SL3,SL4に対する2つの折線部分に関して、同様の処理を行なう。そして、これらで上記評価式(1),(2)が成り立つ場合には、図15(e)に示すように、節Nを削除して折線部分を直線によって置き換える。
【0087】
図15(a)と図15(e)とを比較すると明らかなように、この具体例によると、多数の節を有する折線は、より少ない節の折線によって置き換えられる。複雑な形状の道路が単純な形状の道路に置き換えられるため、地図情報のデータ量が減少する。
上記記載は実施例についてなされたが、本発明はそれに限らず、本発明の精神と添付の請求の範囲の範囲内で種々の変更および修正をすることができることは当業者に明らかである。
【図面の簡単な説明】
【0088】
【図1】本発明による地図表示方法を用いる車載用ナビゲーション装置を示すブロック構成図である。
【図2A】本発明による地図表示方法の一実施形態を示す図である。
【図2B】本発明による地図表示方法の一実施形態を示す図である。
【図2C】本発明による地図表示方法の一実施形態を示す図である。
【図3A】本発明による地図表示方法の一実施形態を示す図である。
【図3B】本発明による地図表示方法の一実施形態を示す図である。
【図3C】本発明による地図表示方法の一実施形態を示す図である。
【図4】図2A〜2C,図3A〜3Cに示す実施形態での要約地図の表示のための処理動作の一具体例を示す図である。
【図5】図4におけるステップ103での要約地図の表示範囲の設定方法の一具体例を示す図である。
【図6】要約地図でのオブジェクトとしての道路の種類を模式的に示す図である。
【図7】図6に示す道路の種類毎の優先度の設定方法の一具体例を示すフローチャートである。
【図8】図1における地図データベースでの道路データの一具体例を示す図である。
【図9】図2A〜2C,図3A〜3Cに示す実施形態での要約地図の表示のための処理動作の他の具体例を示す図である。
【図10A】図4に示す要約処理による異なる表示範囲の要約地図でのオブジェクトを示す図である。
【図10B】図4に示す要約処理による異なる表示範囲の要約地図でのオブジェクトを示す図である。
【図11A】図9に示す要約処理による異なる表示範囲の要約地図でのオブジェクトを示す図である。
【図11B】図9に示す要約処理による異なる表示範囲の要約地図でのオブジェクトを示す図である。
【図12】図1における地図データベースでの走行速度に応じたオブジェクトの表示量を規制するデータの一具体例を示す図である。
【図13A】本発明による地図表示方法の他の実施形態を示す図である。
【図13B】本発明による地図表示方法の他の実施形態を示す図である。
【図14】図4のステップ108での折線図形の直線化処理の一具体例を示す説明図である。
【図15】図4のステップ108での折線図形の直線化処理の他の具体例を示す説明図である。
【特許請求の範囲】
【請求項1】
車両の現在位置を検出し、該車両の現在位置を表わす自車位置マークと該車両が走行する誘導経路とを含めた道路地図を表示する地図表示方法において、
該車両の現在位置から目的地までの誘導経路を表わす要約地図を表示し、
該要約地図は、該車両の現在位置から目的地までの距離に応じた要約度で要約された地図であることを特徴とする地図表示方法。
【請求項2】
請求項1において、
前記要約地図は、前記要約度に応じて、要約地図を構成する道路や表示要素の制限表示数を異ならせることを特徴とする地図表示方法。
【請求項3】
請求項2において、
前記道路や前記表示要素では、その種類毎に優先度が設定され、前記要約度に応じて前記要約地図で表示させる前記道路や前記表示要素を、該優先度をもとに、選択することを特徴とする地図表示方法。
【請求項4】
請求項1に記載の要約地図と他の表示形態の道路地図との2画面表示を可能とすることを特徴とする地図表示方法。
【請求項5】
請求項2に記載の要約地図と他の表示形態の道路地図との2画面表示を可能とすることを特徴とする地図表示方法。
【請求項6】
請求項3に記載の要約地図と他の表示形態の道路地図との2画面表示を可能とすることを特徴とする地図表示方法。
【請求項7】
請求項4において、
前記他の表示形態の道路地図は、前記車両の現在位置付近の局所的な平面地図であることを特徴とする地図表示方法。
【請求項8】
請求項7において、
前記局所的な平面地図は、その縮尺率が可変であることを特徴とする地図表示方法。
【請求項9】
車両の現在位置を検出し、該車両の現在位置を表わす自車位置マークと該車両が走行する誘導経路とを含めた道路地図を表示する地図表示方法において、
該車両の現在位置からの誘導経路を含む局所的な領域を表わす要約地図を表示し、
該要約地図は、該車両の走行速度に応じて、要約地図を構成する道路や表示要素の制限表示量を異ならせることを特徴とする地図表示方法。
【請求項10】
請求項9において、
前記要約地図は、前記車両の走行速度に応じて地図の表示領域の範囲が変化することを特徴とする地図表示方法。
【請求項1】
車両の現在位置を検出し、該車両の現在位置を表わす自車位置マークと該車両が走行する誘導経路とを含めた道路地図を表示する地図表示方法において、
該車両の現在位置から目的地までの誘導経路を表わす要約地図を表示し、
該要約地図は、該車両の現在位置から目的地までの距離に応じた要約度で要約された地図であることを特徴とする地図表示方法。
【請求項2】
請求項1において、
前記要約地図は、前記要約度に応じて、要約地図を構成する道路や表示要素の制限表示数を異ならせることを特徴とする地図表示方法。
【請求項3】
請求項2において、
前記道路や前記表示要素では、その種類毎に優先度が設定され、前記要約度に応じて前記要約地図で表示させる前記道路や前記表示要素を、該優先度をもとに、選択することを特徴とする地図表示方法。
【請求項4】
請求項1に記載の要約地図と他の表示形態の道路地図との2画面表示を可能とすることを特徴とする地図表示方法。
【請求項5】
請求項2に記載の要約地図と他の表示形態の道路地図との2画面表示を可能とすることを特徴とする地図表示方法。
【請求項6】
請求項3に記載の要約地図と他の表示形態の道路地図との2画面表示を可能とすることを特徴とする地図表示方法。
【請求項7】
請求項4において、
前記他の表示形態の道路地図は、前記車両の現在位置付近の局所的な平面地図であることを特徴とする地図表示方法。
【請求項8】
請求項7において、
前記局所的な平面地図は、その縮尺率が可変であることを特徴とする地図表示方法。
【請求項9】
車両の現在位置を検出し、該車両の現在位置を表わす自車位置マークと該車両が走行する誘導経路とを含めた道路地図を表示する地図表示方法において、
該車両の現在位置からの誘導経路を含む局所的な領域を表わす要約地図を表示し、
該要約地図は、該車両の走行速度に応じて、要約地図を構成する道路や表示要素の制限表示量を異ならせることを特徴とする地図表示方法。
【請求項10】
請求項9において、
前記要約地図は、前記車両の走行速度に応じて地図の表示領域の範囲が変化することを特徴とする地図表示方法。
【図1】

【図2A】
【図2B】
【図2C】
【図3A】
【図3B】
【図3C】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10A】
【図10B】
【図11A】
【図11B】
【図12】
【図13A】
【図13B】

【図14】
【図15】
【図2A】
【図2B】
【図2C】
【図3A】
【図3B】
【図3C】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【図11A】
【図11B】
【図12】
【図13A】
【図13B】
【図14】
【図15】
【国際公開番号】WO2005/020186
【国際公開日】平成17年3月3日(2005.3.3)
【発行日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願番号】特願2005−513286(P2005−513286)
【国際出願番号】PCT/JP2004/011840
【国際出願日】平成16年8月18日(2004.8.18)
【出願人】(000005108)株式会社日立製作所 (27,607)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【国際公開日】平成17年3月3日(2005.3.3)
【発行日】平成19年11月22日(2007.11.22)
【国際特許分類】
【国際出願番号】PCT/JP2004/011840
【国際出願日】平成16年8月18日(2004.8.18)
【出願人】(000005108)株式会社日立製作所 (27,607)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]