
地図表示装置および地図表示プログラム
【課題】イグニッションスイッチがオフされた状態で車両が遠隔地に移動された後であっても、正しい自車位置を即座に表示できるカーナビゲーション装置を提供する。
【解決手段】車載機100の接続部120には、GPS機能を有する携帯電話機10を接続できる。車両のイグニッションスイッチがオンされて車載機100の電源が入ると、制御回路114は、接続部120への携帯電話機10の接続の有無を判断し、携帯電話機10が接続され、かつ、GPSセンサ111cから測位データを取得できない場合には、携帯電話機10から取得した測位データに基づいて自車位置を表示モニタ119に表示するように各部を制御する。これにより、たとえばフェリーで車両を移動させた場合のように、イグニッションスイッチをオフにした状態で車両を遠隔地に移動させた後であっても、表示モニタ119に正しい自車位置を即座に表示できる。
【解決手段】車載機100の接続部120には、GPS機能を有する携帯電話機10を接続できる。車両のイグニッションスイッチがオンされて車載機100の電源が入ると、制御回路114は、接続部120への携帯電話機10の接続の有無を判断し、携帯電話機10が接続され、かつ、GPSセンサ111cから測位データを取得できない場合には、携帯電話機10から取得した測位データに基づいて自車位置を表示モニタ119に表示するように各部を制御する。これにより、たとえばフェリーで車両を移動させた場合のように、イグニッションスイッチをオフにした状態で車両を遠隔地に移動させた後であっても、表示モニタ119に正しい自車位置を即座に表示できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人工衛星から送信される送信波に基づいて検出した自己の位置を地図とともに表示する地図表示技術に関する。
【背景技術】
【0002】
GPS衛星から送信されるGPS信号に基づいて検出した自己の位置を表示するGPS受信機が知られている。GPS受信機では、電源オフ時の自らの位置を記憶しておき、再び電源がオンされた際に、記憶していた位置を現在地として表示する。しかし、電源がオフされた後、GPS受信機が遠隔地に移動されてしまうと、再び電源がオンされてもGPS信号を受信して現在地を検出するまで正しい現在地が表示できない。また、遠隔地に移動された場合には、GPS衛星をすぐに捕捉できないため、正しい現在地を表示するまでに時間を要してしまう。
【0003】
この問題を解決するため、遠隔地に移動された場合であっても、発信局から送信されるラジオ信号に基づいて現在地を推定することで、GPS衛星の捕捉に要する時間を短縮して、短時間で正しい現在地の表示を可能としたGPS受信機が知られている(特許文献1参照)。
【0004】
【特許文献1】特開平9−288165号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、従来のGPS受信機では、正しい現在地を表示するまでの時間をある程度短縮できるが、依然としてGPS信号に基づいて現在地を検出するまでは、正しい現在地を表示できない。
【課題を解決するための手段】
【0006】
(1) 請求項1の発明による地図表示装置は、人工衛星から送信される送信波に基づいて位置情報を取得する位置情報取得手段と、送信波に基づいて位置情報を取得する外部の位置情報取得装置から位置情報を入力する入力手段と、位置情報取得手段で取得した位置情報および外部の位置情報取得装置から入力された位置情報のいずれか一方の位置情報により自己の位置を算出する算出手段を備えることを特徴とする。
(2) 請求項2の発明による地図表示装置は、自車位置情報を取得する自車位置情報取得手段と、自車位置情報取得手段で取得した自車位置情報に基づいて自車位置を表示する表示手段と、位置情報の取得機能を有する携帯情報端末が接続される接続部と、接続部への携帯情報端末の接続の有無を検出する検出手段と、検出手段で携帯情報端末が接続部に接続されたことを検出すると、携帯情報端末が取得した携帯情報端末についての位置情報を取得する外部位置情報取得手段と、自車位置情報取得手段で自車位置情報を取得できない場合に、外部位置情報取得手段で取得した携帯情報端末についての位置情報に基づいて自車位置を表示手段に表示させる自車位置表示制御手段とを備えることを特徴とする。
(3) 請求項3の発明は、請求項2に記載の地図表示装置において、自車位置情報取得手段で取得した自車位置情報を記憶する記憶手段をさらに備え、自車位置表示制御手段は、自車位置情報取得手段で自車位置情報を取得できない場合に、接続部に携帯情報端末が接続されていないことが検出手段で検出されると、記憶手段で記憶した自車位置情報に基づいて自車位置を表示部に表示させることを特徴とする。
(4) 請求項4の発明は、請求項2または請求項3に記載の地図表示装置において、自車位置表示制御手段は、外部位置情報取得手段で取得した携帯情報端末についての位置情報に基づいて自車位置を表示手段に表示させた後、自車位置情報取得手段で自車位置情報を取得した場合には、自車位置情報取得手段で取得した自車位置情報に基づいて自車位置を表示手段に表示させることを特徴とする。
(5) 請求項5の発明は、請求項4に記載の地図表示装置において、自車位置表示制御手段は、外部位置情報取得手段で取得した携帯情報端末についての位置情報に基づいて自車位置を表示手段に表示させた後、自車位置情報取得手段で自車位置情報を取得するまでは、外部位置情報取得手段で取得した携帯情報端末についての位置情報に基づいて表示手段に表示させる自車位置を更新することを特徴とする。
(6) 請求項6の発明は、請求項2〜5のいずれか一項に記載の地図表示装置において、接続部は、携帯電話機を接続するインターフェースを備えていることを特徴とする。
(7) 請求項7の発明による地図表示プログラムは、自車位置情報を取得する処理と、取得した自車位置情報に基づいて自車位置を表示する処理と、携帯情報端末の接続の有無を検出する処理と、携帯情報端末が接続されたことを検出すると、携帯情報端末が取得した携帯情報端末についての位置情報を取得する処理と、自車位置情報を取得できない場合に、携帯情報端末から取得した携帯情報端末についての位置情報に基づいて自車位置を表示させる処理とをコンピュータ上で実行することを特徴とする。
【発明の効果】
【0007】
本発明によれば、電源がオフされた状態で遠隔地に移動された場合であっても、その後電源がオンされたときには正しい自己の位置を即座に算出できる。また、請求項2および請求項7の発明によれば、車両のイグニッションスイッチがオフされた状態で車両が遠隔地に移動された場合であっても、その後車両のイグニッションスイッチがオンされたときには正しい自己の位置を即座に表示できる。
【発明を実施するための最良の形態】
【0008】
図1,2を参照して、本発明による地図表示装置をカーナビゲーション装置に適用した一実施の形態を説明する。図1は、本実施の形態のカーナビゲーション装置(以下、車載機100と呼ぶ)の構成を表すシステムブロック図である。車載機100は、車両の現在地(自車位置)を検出して、自車位置周辺の道路地図を表示する機能や、出発地から目的地までの推奨経路を演算する機能、演算された推奨経路に基づいて経路誘導を行う機能などを兼ね備えている。車載機100は、いわゆるナビゲーションあるいは道路案内などを行う装置であり、車両に据え付けられている。
【0009】
図1において、111は自車位置を検出する現在地検出装置であり、たとえば車両の進行方位を検出する方位センサ111a、車速を検出する車速センサ111b、GPS衛星からのGPS信号を検出して測位データを出力するGPSセンサ111c、車両の進行方向の変化を検出するジャイロセンサ111d等からなる。112は地図表示用データやルート探索用データなど、各種データを格納する地図記憶部であり、これら各種データは記録媒体であるDVD−ROM113から読み込まれる。なお、記録媒体はDVD−ROMに限定されず、磁気テープやCD−ROM、ハードディスク、メモリカードその他のあらゆる記録媒体であってもよい。
【0010】
114は装置全体を制御する制御回路であり、マイクロプロセッサおよびその周辺回路からなる。制御回路114は、現在地検出装置111から取得した自車位置に関する情報を基に自車位置を算出、特定する。すなわち、制御回路114は、方位センサ111a、車速センサ111b、およびジャイロセンサ111dを用いた公知の自律航法と、GPSセンサ111cから取得した測位データを利用したGPS航法とを併用する、いわゆるハイブリット方式の自車位置算出方法によって自車位置を算出する。そして算出した自車位置に対して公知のマップマッチングを行うことで、自車位置を特定する。また、制御回路114は、RAM115を作業エリアとしてROM116に格納された制御プログラムを実行して後述する各種の制御を行う。
【0011】
117は、車両の目的地や経由地等を入力し、あるいは各種操作を入力するためのスイッチ類を有する入力装置である。入力装置117には表示モニタ119に設けられたタッチパネルも含まれる。118は、表示モニタ119に表示するための画像データを格納する画像メモリであり、この画像データは道路地図描画用データや各種の図形データなどから作成される。画像メモリ118に格納された画像データは適宜読み出されて、表示手段としての表示モニタ119に表示される。表示モニタ119には、自車位置を表す自車位置マーク、経路情報および誘導情報などが道路地図とともに表示される。
【0012】
120は、携帯電話機10が接続可能な接続部であり、携帯電話機10を接続するインターフェースを備えている。接続部120と携帯電話機10とは、有線通信、または、赤外線通信やブルートゥース(Bluetooth)(登録商標)方式などの無線通信によって互いに接続される。なお、接続部120に接続される携帯電話機10は、GPS衛星からのGPS信号を受信することで、自己の現在地を検出可能な携帯電話機である。後述するように、接続部120は、接続された携帯電話機10から携帯電話機10が有する測位データを取得して、制御回路114に出力する。
【0013】
130は、車両の移動に応じて変化する自車位置の情報を記憶する不揮発メモリである。不揮発メモリ130は、車載機100の電源や車両のイグニッションスイッチがオフにされても、記憶した自車位置の情報を保持する。
【0014】
このように構成される車載機100は、現在地検出装置111により取得した自車位置情報および地図記憶部112に格納されている地図情報に基づき各種のナビゲーションを行う。たとえば、自車位置近辺の道路地図および自車位置を表示モニタ119に表示し、経路探索によって得られた経路に沿ってドライバーを誘導する。また、後述するように、車載機100は、車両のイグニッションスイッチがオンされた直後にGPSセンサ111cから測位データが取得できない場合には、接続部120に接続された携帯電話機10から携帯電話機10が有する測位データを取得して自車位置を算出する。以下、詳述する。
【0015】
車両のイグニッションスイッチがオフされると、車載機100への電力供給が絶たれるが、上述したように、不揮発メモリ130は車載機100への電力供給が絶たれる直前の自車位置の情報を記憶して保持する。その後、再び車両のイグニッションスイッチがオンされて、車載機100への電力供給が再開されると、制御回路114は、不揮発メモリ130に記憶されている自車位置の情報を読み込んで、表示モニタ119に表示される道路地図に自車位置マークを重畳して表示するよう各部を制御する。その後、制御回路114は、GPSセンサ111cから測位データを受信すると、その測位データに基づいて自車位置を算出し、表示モニタ119に表示される道路地図に自車位置マークを重畳して表示するよう各部を制御する。
【0016】
イグニッションスイッチがオフされたときの車両の位置と、その後イグニッションスイッチがオンされたときの車両の位置とが同じ位置であれば、GPSセンサ111cが測位データを出力する前であっても、不揮発メモリ130に記憶されている自車位置の情報に基づいて正しい自車位置を表示できる。この点に関しては、従来のカーナビゲーション装置でも同様である。
【0017】
しかし、従来のカーナビゲーション装置では、たとえば、車両をフェリーに載せた場合のように、イグニッションスイッチがオフされたときの車両の位置(出航地)と、その後イグニッションスイッチがオンされたときの車両の位置(到着地)とが大きく離れてしまうと、GPSセンサが測位データを出力するまでは正しい自車位置を表示できない。すなわち、到着地でイグニッションスイッチがオンされると、出航地でイグニッションスイッチがオフされた位置を自車位置として表示してしまう。このような場合には、GPSセンサから測位データを得るまでの間、自車位置が誤って表示されてしまう。また、到着地が出港地から遠隔地であった場合には、GPSセンサですぐにGPS衛星を捕捉できないため、正しい自車位置を表示するまでに時間を要してしまう。
【0018】
そこで、本実施の形態のカーナビゲーション装置では、イグニッションスイッチがオンされた際に、接続部120に携帯電話機10が接続されている場合には、携帯電話機10が有する、緯度および経度の情報を含む測位データを取得する。通常、携帯電話機10は常時電源がオンされた状態で使用されているため、連続的に、または、定期的にGPS衛星からのGPS信号を受信して自己の現在地を検出している。そのため、たとえば車両のユーザーが上述したようにフェリーに乗船した場合であっても、ユーザーが有する携帯電話機10は自己の正しい位置を検出できる。
【0019】
フェリーからの下船時にユーザーが携帯電話機10を接続部120に接続すれば、接続部120を介して、携帯電話機10が有する測位データを制御回路114が取得する。制御回路114は、携帯電話機10から取得した測位データに基づいて自車位置を算出し、表示モニタ119に表示される道路地図に自車位置マークを重畳して表示するよう各部を制御する。車両が走行して移動した場合には、制御回路114は、GPSセンサ111cの代わりに携帯電話機10から測位データを継続的に取得して、上述したように自車位置を算出する。
【0020】
その後、GPSセンサ111cがGPS衛星を捕捉し、GPS信号を検出して測位データを出力すると、以降、制御回路114は、GPSセンサ111cから取得した測位データを用いることで上述したように自車位置を算出する。なお、GPSセンサ111cから測位データが得られるようになった後は、携帯電話機10を接続部120に接続しておく必要はない。このように車載機100では、イグニッションスイッチがオフされた車両を遠隔地に移動した後であっても、接続部120に携帯電話機10を接続することで、イグニッションスイッチがオンされた直後から、表示モニタ119に正しい自車位置を表示できる。たとえば、演算された推奨経路中にフェリーによる移動が含まれていた場合には、フェリーの下船後すぐに表示モニタ119に正しい自車位置が表示されて、経路誘導が再開される。
【0021】
−−−フローチャート−−−
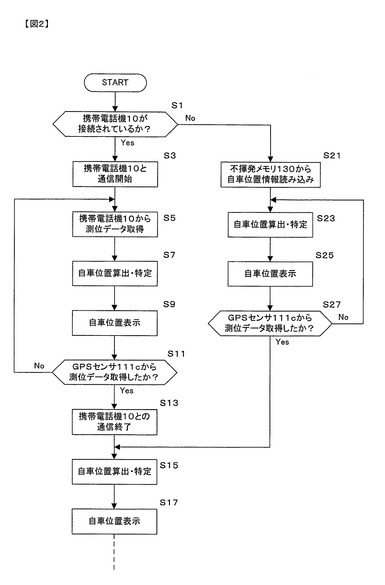
図2は、表示モニタ119に表示させる自車位置マークを更新するプログラムの動作を示すフローチャートである。車両のイグニッションスイッチがオンされて車載機100の電源が入ると、図2に示す処理を行うプログラムが起動され、制御回路114で実行される。ステップS1において、接続部120に携帯電話機10が接続されているか否かを判断する。ステップS1が肯定判断されるとステップS3へ進み、携帯電話機10との通信を開始してステップS5へ進む。
【0022】
ステップS5において、携帯電話機10から測位データを取得してステップS7へ進む。ステップS7において、ステップS5で取得した携帯電話機10からの測位データや、方位センサ111a、車速センサ111b、およびジャイロセンサ111dからのデータに基づいて上述したように自車位置を算出し、さらにマップマッチングを行うことで自車位置を特定してステップS9へ進む。ステップS9において、ステップS7で特定した自車位置に基づいて、表示モニタ119に道路地図と自車位置マークとを重畳表示させてステップS11へ進む。
【0023】
ステップS11において、GPSセンサ111cから測位データを取得したか否かを判断する。ステップS11が否定判断されるとステップS5へ戻る。ステップS11が肯定判断されるとステップS13へ進み、携帯電話機10との通信を終了してステップS15へ進む。ステップS15において、取得したGPSセンサ111cからの測位データや、方位センサ111a、車速センサ111b、およびジャイロセンサ111dからのデータに基づいて上述したように自車位置を算出し、さらにマップマッチングを行うことで自車位置を特定してステップS17へ進む。
【0024】
ステップS17において、ステップS15で特定した自車位置に基づいて、表示モニタ119に道路地図と自車位置マークとを重畳表示させる。なお、ステップS17以降の処理においては、引き続きステップS15およびステップS17で実行された処理と同じ内容の処理を繰り返すが、従来のカーナビゲーション装置と同様の処理内容であるので、その説明を省略する。
【0025】
ステップS1が否定判断されるとステップS21へ進み、不揮発メモリ130に記憶されている自車位置の情報を読み込んでステップS23へ進む。ステップS23において、ステップS21で取得した自車位置の情報や、方位センサ111a、車速センサ111b、およびジャイロセンサ111dからのデータに基づいて上述したように自車位置を算出し、さらにマップマッチングを行うことで自車位置を特定してステップS25へ進む。ステップS25において、ステップS23で特定した自車位置に基づいて、表示モニタ119に道路地図と自車位置マークとを重畳表示させてステップ27へ進む。
【0026】
ステップ27において、GPSセンサ111cから測位データを取得したか否かを判断する。ステップS27が否定判断されるとステップS23へ戻る。ステップS27が肯定判断されるとステップS15へ進む。
【0027】
本実施の形態の車載機100では、次の作用効果を奏する。
(1) 制御回路114が接続部120への携帯電話機10の接続の有無を判断し、携帯電話機10が接続され、かつ、GPSセンサ111cから測位データを取得できない場合には、携帯電話機10から取得した測位データに基づいて自車位置を表示モニタ119に表示するように構成した。これにより、イグニッションスイッチをオフにした状態で車両を遠隔地に移動させた後であっても、表示モニタ119に正しい自車位置を即座に表示できる。したがって、誤った自車位置が表示されたり、正しい自車位置の表示までに時間がかかるといった従来のカーナビゲーション装置における不都合を解消できる。
【0028】
(2) 接続部120に携帯電話機10が接続されていない場合には、不揮発メモリ130に記憶されている自車位置の情報に基づいて自車位置を表示モニタ119に表示するように構成した。したがって、単なる車両の駐車後にイグニッションスイッチを再びオンさせる場合のように、イグニッションスイッチがオフされた後に車両が移動されない場合には、携帯電話機10を接続部120に接続させなくてもよく、イグニッションスイッチがオンされると、表示モニタ119に正しい自車位置が表示される。これにより、イグニッションスイッチをオフにした車両を遠隔地に移動させた場合のように、不揮発メモリ130に記憶されている自車位置の情報と実際の車両の位置とに齟齬が生じる場合を除き、携帯電話機10を接続部120に接続させる必要がないので、煩わしさがない。
【0029】
(3) 制御回路114がGPSセンサ111cから測位データを取得した後は、GPSセンサ111cから取得した測位データに基づいて自車位置を表示モニタ119に表示するように構成した。したがって、制御回路114がGPSセンサ111cから測位データを取得した後は、携帯電話機10を接続部120に接続しておく必要がなくなるので、携帯電話機10を自由に使用できる。これにより、車載機100が携帯電話機10を拘束する時間を最小限にできる。
【0030】
(4) 制御回路114がGPSセンサ111cから測位データを取得するまでは、携帯電話機10から取得した測位データに基づいて自車位置を更新して表示モニタ119に表示するように構成した。これにより、イグニッションスイッチをオフにした状態で車両を遠隔地に移動させた場合のように、GPSセンサ111cがいわゆるコールドスタートをすることとなって、GPS衛星の捕捉に時間がかかる場合であっても、表示モニタ119に正しい自車位置を即座に表示でき、利便性が高い。
【0031】
(5) ユーザーが有している携帯電話機10を利用して、車載機100の外部から測位データ取得を取得するように構成した。これにより、車載機100の製造コスト増を低減できるとともに、ユーザーに対して新たなコスト負担を強いることがないので、経済的である。
【0032】
−−−変形例−−−
(1) 上述の説明では、車載機100はいわゆる据付型の装置であるが、車両から容易に着脱可能ないわゆるポータブル型の装置であってもよい。
【0033】
(2) 上述の説明では、イグニッションスイッチがオフされた車両が遠隔地に移動される場合の例として、フェリーによる移動を挙げているが、車両を航空機や鉄道、他の車両を用いて移動する場合であっても同様である。また、車載機100の電源をオフにしたまま、車両を移動させた後に車載機100の電源をオンする場合も同様である。なお、車載機100が上述したいわゆるポータブル型の装置である場合には、車両から取り外した車載機100のみを、その車両から離れた場所にある他の車両に取り付けて使用する場合にも、本発明を適用でき、同様の作用効果を奏する。
【0034】
(3) 上述の説明では、接続部120に携帯電話機10を接続することとしているが、本発明はこれに限定されず、携帯電話機10の代わりに、たとえばGPS機能を有するPDAや、いわゆるハンディGPS装置のように、GPS衛星から得られるGPS信号に基づいて測位データを出力可能な様々な携帯情報端末を用いることができる。
【0035】
(4) 上述の説明では、イグニッションスイッチがオンされる前に、あらかじめ携帯電話機10を接続部120に接続するように構成しているが、本発明はこれに限定されない。たとえば、イグニッションスイッチがオンされて、車載機100への電力供給が開始された後であっても、携帯電話機10を接続できるように構成してもよい。また、GPSセンサ111cがいわゆるコールドスタートをすることとなった場合であって、接続部120に携帯電話機10が接続されていない場合には、携帯電話機の接続を促す旨の表示を表示モニタ119に表示させたり、携帯電話機の接続を音声で促したりするように構成してもよい。
【0036】
(5) 本発明は、既存のカーナビゲーション装置に実装されている制御プログラムを書き換えることにより、既存のカーナビゲーション装置に上述した携帯電話機10(携帯情報端末)からの測位データ取得機能、携帯情報端末から取得した測位データに基づく自車位置算出機能を付与することができる。すなわち、本発明による地図表示プログラム製品は、自車位置情報を取得する処理と、取得した自車位置情報に基づいて自車位置を表示する処理と、携帯情報端末の接続の有無を検出する処理と、携帯情報端末が接続されたことを検出すると、携帯情報端末が取得した携帯情報端末についての位置情報を取得する処理と、自車位置情報を取得できない場合に、携帯情報端末から取得した携帯情報端末についての位置情報に基づいて自車位置を表示させる処理とをコンピュータで実行させるものである。
(6) 上述した各実施の形態および変形例は、それぞれ組み合わせてもよい。
【0037】
以上の実施の形態およびその変形例において、たとえば、位置情報取得手段および自車位置情報取得手段はGPSセンサ111cに、入力手段および接続部は接続部120に、表示手段は表示モニタ119に、記憶手段は不揮発メモリ130にそれぞれ対応する。算出手段、検出手段、外部位置情報取得手段、および自車位置表示制御手段は、制御回路114、およびROM116に格納された制御プログラムによって実現される。
【0038】
なお、以上の説明はあくまで一例であり、発明を解釈する際、上記の実施形態の記載事項と特許請求の範囲の記載事項の対応関係になんら限定も拘束もされない。すなわち、本発明の特徴を損なわない限り、本発明は上記実施の形態に何ら限定されるものではない。
【0039】
また、本発明は、人工衛星から送信される送信波に基づいて位置情報を取得する位置情報取得手段と、送信波に基づいて位置情報を取得する外部の位置情報取得装置から位置情報を入力する入力手段と、位置情報取得手段で取得した位置情報および外部の位置情報取得装置から入力された位置情報のいずれか一方の位置情報により自己の位置を算出する算出手段を備える各種構造の地図表示装置を含むものである。
【図面の簡単な説明】
【0040】
【図1】車載機100の構成を表すシステムブロック図である。
【図2】表示モニタ119に表示させる自車位置マークを更新するプログラムの動作を示すフローチャートである。
【符号の説明】
【0041】
10 携帯電話機 100 カーナビゲーション装置(車載機)
111 現在地検出装置 111c GPSセンサ
114 制御回路 119 表示モニタ
120 接続部 130 不揮発メモリ
【技術分野】
【0001】
本発明は、人工衛星から送信される送信波に基づいて検出した自己の位置を地図とともに表示する地図表示技術に関する。
【背景技術】
【0002】
GPS衛星から送信されるGPS信号に基づいて検出した自己の位置を表示するGPS受信機が知られている。GPS受信機では、電源オフ時の自らの位置を記憶しておき、再び電源がオンされた際に、記憶していた位置を現在地として表示する。しかし、電源がオフされた後、GPS受信機が遠隔地に移動されてしまうと、再び電源がオンされてもGPS信号を受信して現在地を検出するまで正しい現在地が表示できない。また、遠隔地に移動された場合には、GPS衛星をすぐに捕捉できないため、正しい現在地を表示するまでに時間を要してしまう。
【0003】
この問題を解決するため、遠隔地に移動された場合であっても、発信局から送信されるラジオ信号に基づいて現在地を推定することで、GPS衛星の捕捉に要する時間を短縮して、短時間で正しい現在地の表示を可能としたGPS受信機が知られている(特許文献1参照)。
【0004】
【特許文献1】特開平9−288165号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、従来のGPS受信機では、正しい現在地を表示するまでの時間をある程度短縮できるが、依然としてGPS信号に基づいて現在地を検出するまでは、正しい現在地を表示できない。
【課題を解決するための手段】
【0006】
(1) 請求項1の発明による地図表示装置は、人工衛星から送信される送信波に基づいて位置情報を取得する位置情報取得手段と、送信波に基づいて位置情報を取得する外部の位置情報取得装置から位置情報を入力する入力手段と、位置情報取得手段で取得した位置情報および外部の位置情報取得装置から入力された位置情報のいずれか一方の位置情報により自己の位置を算出する算出手段を備えることを特徴とする。
(2) 請求項2の発明による地図表示装置は、自車位置情報を取得する自車位置情報取得手段と、自車位置情報取得手段で取得した自車位置情報に基づいて自車位置を表示する表示手段と、位置情報の取得機能を有する携帯情報端末が接続される接続部と、接続部への携帯情報端末の接続の有無を検出する検出手段と、検出手段で携帯情報端末が接続部に接続されたことを検出すると、携帯情報端末が取得した携帯情報端末についての位置情報を取得する外部位置情報取得手段と、自車位置情報取得手段で自車位置情報を取得できない場合に、外部位置情報取得手段で取得した携帯情報端末についての位置情報に基づいて自車位置を表示手段に表示させる自車位置表示制御手段とを備えることを特徴とする。
(3) 請求項3の発明は、請求項2に記載の地図表示装置において、自車位置情報取得手段で取得した自車位置情報を記憶する記憶手段をさらに備え、自車位置表示制御手段は、自車位置情報取得手段で自車位置情報を取得できない場合に、接続部に携帯情報端末が接続されていないことが検出手段で検出されると、記憶手段で記憶した自車位置情報に基づいて自車位置を表示部に表示させることを特徴とする。
(4) 請求項4の発明は、請求項2または請求項3に記載の地図表示装置において、自車位置表示制御手段は、外部位置情報取得手段で取得した携帯情報端末についての位置情報に基づいて自車位置を表示手段に表示させた後、自車位置情報取得手段で自車位置情報を取得した場合には、自車位置情報取得手段で取得した自車位置情報に基づいて自車位置を表示手段に表示させることを特徴とする。
(5) 請求項5の発明は、請求項4に記載の地図表示装置において、自車位置表示制御手段は、外部位置情報取得手段で取得した携帯情報端末についての位置情報に基づいて自車位置を表示手段に表示させた後、自車位置情報取得手段で自車位置情報を取得するまでは、外部位置情報取得手段で取得した携帯情報端末についての位置情報に基づいて表示手段に表示させる自車位置を更新することを特徴とする。
(6) 請求項6の発明は、請求項2〜5のいずれか一項に記載の地図表示装置において、接続部は、携帯電話機を接続するインターフェースを備えていることを特徴とする。
(7) 請求項7の発明による地図表示プログラムは、自車位置情報を取得する処理と、取得した自車位置情報に基づいて自車位置を表示する処理と、携帯情報端末の接続の有無を検出する処理と、携帯情報端末が接続されたことを検出すると、携帯情報端末が取得した携帯情報端末についての位置情報を取得する処理と、自車位置情報を取得できない場合に、携帯情報端末から取得した携帯情報端末についての位置情報に基づいて自車位置を表示させる処理とをコンピュータ上で実行することを特徴とする。
【発明の効果】
【0007】
本発明によれば、電源がオフされた状態で遠隔地に移動された場合であっても、その後電源がオンされたときには正しい自己の位置を即座に算出できる。また、請求項2および請求項7の発明によれば、車両のイグニッションスイッチがオフされた状態で車両が遠隔地に移動された場合であっても、その後車両のイグニッションスイッチがオンされたときには正しい自己の位置を即座に表示できる。
【発明を実施するための最良の形態】
【0008】
図1,2を参照して、本発明による地図表示装置をカーナビゲーション装置に適用した一実施の形態を説明する。図1は、本実施の形態のカーナビゲーション装置(以下、車載機100と呼ぶ)の構成を表すシステムブロック図である。車載機100は、車両の現在地(自車位置)を検出して、自車位置周辺の道路地図を表示する機能や、出発地から目的地までの推奨経路を演算する機能、演算された推奨経路に基づいて経路誘導を行う機能などを兼ね備えている。車載機100は、いわゆるナビゲーションあるいは道路案内などを行う装置であり、車両に据え付けられている。
【0009】
図1において、111は自車位置を検出する現在地検出装置であり、たとえば車両の進行方位を検出する方位センサ111a、車速を検出する車速センサ111b、GPS衛星からのGPS信号を検出して測位データを出力するGPSセンサ111c、車両の進行方向の変化を検出するジャイロセンサ111d等からなる。112は地図表示用データやルート探索用データなど、各種データを格納する地図記憶部であり、これら各種データは記録媒体であるDVD−ROM113から読み込まれる。なお、記録媒体はDVD−ROMに限定されず、磁気テープやCD−ROM、ハードディスク、メモリカードその他のあらゆる記録媒体であってもよい。
【0010】
114は装置全体を制御する制御回路であり、マイクロプロセッサおよびその周辺回路からなる。制御回路114は、現在地検出装置111から取得した自車位置に関する情報を基に自車位置を算出、特定する。すなわち、制御回路114は、方位センサ111a、車速センサ111b、およびジャイロセンサ111dを用いた公知の自律航法と、GPSセンサ111cから取得した測位データを利用したGPS航法とを併用する、いわゆるハイブリット方式の自車位置算出方法によって自車位置を算出する。そして算出した自車位置に対して公知のマップマッチングを行うことで、自車位置を特定する。また、制御回路114は、RAM115を作業エリアとしてROM116に格納された制御プログラムを実行して後述する各種の制御を行う。
【0011】
117は、車両の目的地や経由地等を入力し、あるいは各種操作を入力するためのスイッチ類を有する入力装置である。入力装置117には表示モニタ119に設けられたタッチパネルも含まれる。118は、表示モニタ119に表示するための画像データを格納する画像メモリであり、この画像データは道路地図描画用データや各種の図形データなどから作成される。画像メモリ118に格納された画像データは適宜読み出されて、表示手段としての表示モニタ119に表示される。表示モニタ119には、自車位置を表す自車位置マーク、経路情報および誘導情報などが道路地図とともに表示される。
【0012】
120は、携帯電話機10が接続可能な接続部であり、携帯電話機10を接続するインターフェースを備えている。接続部120と携帯電話機10とは、有線通信、または、赤外線通信やブルートゥース(Bluetooth)(登録商標)方式などの無線通信によって互いに接続される。なお、接続部120に接続される携帯電話機10は、GPS衛星からのGPS信号を受信することで、自己の現在地を検出可能な携帯電話機である。後述するように、接続部120は、接続された携帯電話機10から携帯電話機10が有する測位データを取得して、制御回路114に出力する。
【0013】
130は、車両の移動に応じて変化する自車位置の情報を記憶する不揮発メモリである。不揮発メモリ130は、車載機100の電源や車両のイグニッションスイッチがオフにされても、記憶した自車位置の情報を保持する。
【0014】
このように構成される車載機100は、現在地検出装置111により取得した自車位置情報および地図記憶部112に格納されている地図情報に基づき各種のナビゲーションを行う。たとえば、自車位置近辺の道路地図および自車位置を表示モニタ119に表示し、経路探索によって得られた経路に沿ってドライバーを誘導する。また、後述するように、車載機100は、車両のイグニッションスイッチがオンされた直後にGPSセンサ111cから測位データが取得できない場合には、接続部120に接続された携帯電話機10から携帯電話機10が有する測位データを取得して自車位置を算出する。以下、詳述する。
【0015】
車両のイグニッションスイッチがオフされると、車載機100への電力供給が絶たれるが、上述したように、不揮発メモリ130は車載機100への電力供給が絶たれる直前の自車位置の情報を記憶して保持する。その後、再び車両のイグニッションスイッチがオンされて、車載機100への電力供給が再開されると、制御回路114は、不揮発メモリ130に記憶されている自車位置の情報を読み込んで、表示モニタ119に表示される道路地図に自車位置マークを重畳して表示するよう各部を制御する。その後、制御回路114は、GPSセンサ111cから測位データを受信すると、その測位データに基づいて自車位置を算出し、表示モニタ119に表示される道路地図に自車位置マークを重畳して表示するよう各部を制御する。
【0016】
イグニッションスイッチがオフされたときの車両の位置と、その後イグニッションスイッチがオンされたときの車両の位置とが同じ位置であれば、GPSセンサ111cが測位データを出力する前であっても、不揮発メモリ130に記憶されている自車位置の情報に基づいて正しい自車位置を表示できる。この点に関しては、従来のカーナビゲーション装置でも同様である。
【0017】
しかし、従来のカーナビゲーション装置では、たとえば、車両をフェリーに載せた場合のように、イグニッションスイッチがオフされたときの車両の位置(出航地)と、その後イグニッションスイッチがオンされたときの車両の位置(到着地)とが大きく離れてしまうと、GPSセンサが測位データを出力するまでは正しい自車位置を表示できない。すなわち、到着地でイグニッションスイッチがオンされると、出航地でイグニッションスイッチがオフされた位置を自車位置として表示してしまう。このような場合には、GPSセンサから測位データを得るまでの間、自車位置が誤って表示されてしまう。また、到着地が出港地から遠隔地であった場合には、GPSセンサですぐにGPS衛星を捕捉できないため、正しい自車位置を表示するまでに時間を要してしまう。
【0018】
そこで、本実施の形態のカーナビゲーション装置では、イグニッションスイッチがオンされた際に、接続部120に携帯電話機10が接続されている場合には、携帯電話機10が有する、緯度および経度の情報を含む測位データを取得する。通常、携帯電話機10は常時電源がオンされた状態で使用されているため、連続的に、または、定期的にGPS衛星からのGPS信号を受信して自己の現在地を検出している。そのため、たとえば車両のユーザーが上述したようにフェリーに乗船した場合であっても、ユーザーが有する携帯電話機10は自己の正しい位置を検出できる。
【0019】
フェリーからの下船時にユーザーが携帯電話機10を接続部120に接続すれば、接続部120を介して、携帯電話機10が有する測位データを制御回路114が取得する。制御回路114は、携帯電話機10から取得した測位データに基づいて自車位置を算出し、表示モニタ119に表示される道路地図に自車位置マークを重畳して表示するよう各部を制御する。車両が走行して移動した場合には、制御回路114は、GPSセンサ111cの代わりに携帯電話機10から測位データを継続的に取得して、上述したように自車位置を算出する。
【0020】
その後、GPSセンサ111cがGPS衛星を捕捉し、GPS信号を検出して測位データを出力すると、以降、制御回路114は、GPSセンサ111cから取得した測位データを用いることで上述したように自車位置を算出する。なお、GPSセンサ111cから測位データが得られるようになった後は、携帯電話機10を接続部120に接続しておく必要はない。このように車載機100では、イグニッションスイッチがオフされた車両を遠隔地に移動した後であっても、接続部120に携帯電話機10を接続することで、イグニッションスイッチがオンされた直後から、表示モニタ119に正しい自車位置を表示できる。たとえば、演算された推奨経路中にフェリーによる移動が含まれていた場合には、フェリーの下船後すぐに表示モニタ119に正しい自車位置が表示されて、経路誘導が再開される。
【0021】
−−−フローチャート−−−
図2は、表示モニタ119に表示させる自車位置マークを更新するプログラムの動作を示すフローチャートである。車両のイグニッションスイッチがオンされて車載機100の電源が入ると、図2に示す処理を行うプログラムが起動され、制御回路114で実行される。ステップS1において、接続部120に携帯電話機10が接続されているか否かを判断する。ステップS1が肯定判断されるとステップS3へ進み、携帯電話機10との通信を開始してステップS5へ進む。
【0022】
ステップS5において、携帯電話機10から測位データを取得してステップS7へ進む。ステップS7において、ステップS5で取得した携帯電話機10からの測位データや、方位センサ111a、車速センサ111b、およびジャイロセンサ111dからのデータに基づいて上述したように自車位置を算出し、さらにマップマッチングを行うことで自車位置を特定してステップS9へ進む。ステップS9において、ステップS7で特定した自車位置に基づいて、表示モニタ119に道路地図と自車位置マークとを重畳表示させてステップS11へ進む。
【0023】
ステップS11において、GPSセンサ111cから測位データを取得したか否かを判断する。ステップS11が否定判断されるとステップS5へ戻る。ステップS11が肯定判断されるとステップS13へ進み、携帯電話機10との通信を終了してステップS15へ進む。ステップS15において、取得したGPSセンサ111cからの測位データや、方位センサ111a、車速センサ111b、およびジャイロセンサ111dからのデータに基づいて上述したように自車位置を算出し、さらにマップマッチングを行うことで自車位置を特定してステップS17へ進む。
【0024】
ステップS17において、ステップS15で特定した自車位置に基づいて、表示モニタ119に道路地図と自車位置マークとを重畳表示させる。なお、ステップS17以降の処理においては、引き続きステップS15およびステップS17で実行された処理と同じ内容の処理を繰り返すが、従来のカーナビゲーション装置と同様の処理内容であるので、その説明を省略する。
【0025】
ステップS1が否定判断されるとステップS21へ進み、不揮発メモリ130に記憶されている自車位置の情報を読み込んでステップS23へ進む。ステップS23において、ステップS21で取得した自車位置の情報や、方位センサ111a、車速センサ111b、およびジャイロセンサ111dからのデータに基づいて上述したように自車位置を算出し、さらにマップマッチングを行うことで自車位置を特定してステップS25へ進む。ステップS25において、ステップS23で特定した自車位置に基づいて、表示モニタ119に道路地図と自車位置マークとを重畳表示させてステップ27へ進む。
【0026】
ステップ27において、GPSセンサ111cから測位データを取得したか否かを判断する。ステップS27が否定判断されるとステップS23へ戻る。ステップS27が肯定判断されるとステップS15へ進む。
【0027】
本実施の形態の車載機100では、次の作用効果を奏する。
(1) 制御回路114が接続部120への携帯電話機10の接続の有無を判断し、携帯電話機10が接続され、かつ、GPSセンサ111cから測位データを取得できない場合には、携帯電話機10から取得した測位データに基づいて自車位置を表示モニタ119に表示するように構成した。これにより、イグニッションスイッチをオフにした状態で車両を遠隔地に移動させた後であっても、表示モニタ119に正しい自車位置を即座に表示できる。したがって、誤った自車位置が表示されたり、正しい自車位置の表示までに時間がかかるといった従来のカーナビゲーション装置における不都合を解消できる。
【0028】
(2) 接続部120に携帯電話機10が接続されていない場合には、不揮発メモリ130に記憶されている自車位置の情報に基づいて自車位置を表示モニタ119に表示するように構成した。したがって、単なる車両の駐車後にイグニッションスイッチを再びオンさせる場合のように、イグニッションスイッチがオフされた後に車両が移動されない場合には、携帯電話機10を接続部120に接続させなくてもよく、イグニッションスイッチがオンされると、表示モニタ119に正しい自車位置が表示される。これにより、イグニッションスイッチをオフにした車両を遠隔地に移動させた場合のように、不揮発メモリ130に記憶されている自車位置の情報と実際の車両の位置とに齟齬が生じる場合を除き、携帯電話機10を接続部120に接続させる必要がないので、煩わしさがない。
【0029】
(3) 制御回路114がGPSセンサ111cから測位データを取得した後は、GPSセンサ111cから取得した測位データに基づいて自車位置を表示モニタ119に表示するように構成した。したがって、制御回路114がGPSセンサ111cから測位データを取得した後は、携帯電話機10を接続部120に接続しておく必要がなくなるので、携帯電話機10を自由に使用できる。これにより、車載機100が携帯電話機10を拘束する時間を最小限にできる。
【0030】
(4) 制御回路114がGPSセンサ111cから測位データを取得するまでは、携帯電話機10から取得した測位データに基づいて自車位置を更新して表示モニタ119に表示するように構成した。これにより、イグニッションスイッチをオフにした状態で車両を遠隔地に移動させた場合のように、GPSセンサ111cがいわゆるコールドスタートをすることとなって、GPS衛星の捕捉に時間がかかる場合であっても、表示モニタ119に正しい自車位置を即座に表示でき、利便性が高い。
【0031】
(5) ユーザーが有している携帯電話機10を利用して、車載機100の外部から測位データ取得を取得するように構成した。これにより、車載機100の製造コスト増を低減できるとともに、ユーザーに対して新たなコスト負担を強いることがないので、経済的である。
【0032】
−−−変形例−−−
(1) 上述の説明では、車載機100はいわゆる据付型の装置であるが、車両から容易に着脱可能ないわゆるポータブル型の装置であってもよい。
【0033】
(2) 上述の説明では、イグニッションスイッチがオフされた車両が遠隔地に移動される場合の例として、フェリーによる移動を挙げているが、車両を航空機や鉄道、他の車両を用いて移動する場合であっても同様である。また、車載機100の電源をオフにしたまま、車両を移動させた後に車載機100の電源をオンする場合も同様である。なお、車載機100が上述したいわゆるポータブル型の装置である場合には、車両から取り外した車載機100のみを、その車両から離れた場所にある他の車両に取り付けて使用する場合にも、本発明を適用でき、同様の作用効果を奏する。
【0034】
(3) 上述の説明では、接続部120に携帯電話機10を接続することとしているが、本発明はこれに限定されず、携帯電話機10の代わりに、たとえばGPS機能を有するPDAや、いわゆるハンディGPS装置のように、GPS衛星から得られるGPS信号に基づいて測位データを出力可能な様々な携帯情報端末を用いることができる。
【0035】
(4) 上述の説明では、イグニッションスイッチがオンされる前に、あらかじめ携帯電話機10を接続部120に接続するように構成しているが、本発明はこれに限定されない。たとえば、イグニッションスイッチがオンされて、車載機100への電力供給が開始された後であっても、携帯電話機10を接続できるように構成してもよい。また、GPSセンサ111cがいわゆるコールドスタートをすることとなった場合であって、接続部120に携帯電話機10が接続されていない場合には、携帯電話機の接続を促す旨の表示を表示モニタ119に表示させたり、携帯電話機の接続を音声で促したりするように構成してもよい。
【0036】
(5) 本発明は、既存のカーナビゲーション装置に実装されている制御プログラムを書き換えることにより、既存のカーナビゲーション装置に上述した携帯電話機10(携帯情報端末)からの測位データ取得機能、携帯情報端末から取得した測位データに基づく自車位置算出機能を付与することができる。すなわち、本発明による地図表示プログラム製品は、自車位置情報を取得する処理と、取得した自車位置情報に基づいて自車位置を表示する処理と、携帯情報端末の接続の有無を検出する処理と、携帯情報端末が接続されたことを検出すると、携帯情報端末が取得した携帯情報端末についての位置情報を取得する処理と、自車位置情報を取得できない場合に、携帯情報端末から取得した携帯情報端末についての位置情報に基づいて自車位置を表示させる処理とをコンピュータで実行させるものである。
(6) 上述した各実施の形態および変形例は、それぞれ組み合わせてもよい。
【0037】
以上の実施の形態およびその変形例において、たとえば、位置情報取得手段および自車位置情報取得手段はGPSセンサ111cに、入力手段および接続部は接続部120に、表示手段は表示モニタ119に、記憶手段は不揮発メモリ130にそれぞれ対応する。算出手段、検出手段、外部位置情報取得手段、および自車位置表示制御手段は、制御回路114、およびROM116に格納された制御プログラムによって実現される。
【0038】
なお、以上の説明はあくまで一例であり、発明を解釈する際、上記の実施形態の記載事項と特許請求の範囲の記載事項の対応関係になんら限定も拘束もされない。すなわち、本発明の特徴を損なわない限り、本発明は上記実施の形態に何ら限定されるものではない。
【0039】
また、本発明は、人工衛星から送信される送信波に基づいて位置情報を取得する位置情報取得手段と、送信波に基づいて位置情報を取得する外部の位置情報取得装置から位置情報を入力する入力手段と、位置情報取得手段で取得した位置情報および外部の位置情報取得装置から入力された位置情報のいずれか一方の位置情報により自己の位置を算出する算出手段を備える各種構造の地図表示装置を含むものである。
【図面の簡単な説明】
【0040】
【図1】車載機100の構成を表すシステムブロック図である。
【図2】表示モニタ119に表示させる自車位置マークを更新するプログラムの動作を示すフローチャートである。
【符号の説明】
【0041】
10 携帯電話機 100 カーナビゲーション装置(車載機)
111 現在地検出装置 111c GPSセンサ
114 制御回路 119 表示モニタ
120 接続部 130 不揮発メモリ
【特許請求の範囲】
【請求項1】
人工衛星から送信される送信波に基づいて位置情報を取得する位置情報取得手段と、
前記送信波に基づいて位置情報を取得する外部の位置情報取得装置から位置情報を入力する入力手段と、
前記位置情報取得手段で取得した位置情報および前記外部の位置情報取得装置から入力された位置情報のいずれか一方の位置情報により自己の位置を算出する算出手段を備えることを特徴とする地図表示装置。
【請求項2】
自車位置情報を取得する自車位置情報取得手段と、
前記自車位置情報取得手段で取得した前記自車位置情報に基づいて自車位置を表示する表示手段と、
位置情報の取得機能を有する携帯情報端末が接続される接続部と、
前記接続部への前記携帯情報端末の接続の有無を検出する検出手段と、
前記検出手段で前記携帯情報端末が前記接続部に接続されたことを検出すると、前記携帯情報端末が取得した前記携帯情報端末についての位置情報を取得する外部位置情報取得手段と、
前記自車位置情報取得手段で前記自車位置情報を取得できない場合に、前記外部位置情報取得手段で取得した前記携帯情報端末についての位置情報に基づいて自車位置を前記表示手段に表示させる自車位置表示制御手段とを備えることを特徴とする地図表示装置。
【請求項3】
請求項2に記載の地図表示装置において、
前記自車位置情報取得手段で取得した前記自車位置情報を記憶する記憶手段をさらに備え、
前記自車位置表示制御手段は、前記自車位置情報取得手段で前記自車位置情報を取得できない場合に、前記接続部に前記携帯情報端末が接続されていないことが前記検出手段で検出されると、前記記憶手段で記憶した前記自車位置情報に基づいて前記自車位置を前記表示部に表示させることを特徴とする地図表示装置。
【請求項4】
請求項2または請求項3に記載の地図表示装置において、
前記自車位置表示制御手段は、前記外部位置情報取得手段で取得した前記携帯情報端末についての位置情報に基づいて自車位置を前記表示手段に表示させた後、前記自車位置情報取得手段で前記自車位置情報を取得した場合には、前記自車位置情報取得手段で取得した前記自車位置情報に基づいて自車位置を前記表示手段に表示させることを特徴とする地図表示装置。
【請求項5】
請求項4に記載の地図表示装置において、
前記自車位置表示制御手段は、前記外部位置情報取得手段で取得した前記携帯情報端末についての位置情報に基づいて自車位置を前記表示手段に表示させた後、前記自車位置情報取得手段で前記自車位置情報を取得するまでは、前記外部位置情報取得手段で取得した前記携帯情報端末についての位置情報に基づいて前記表示手段に表示させる自車位置を更新することを特徴とする地図表示装置。
【請求項6】
請求項2〜5のいずれか一項に記載の地図表示装置において、
前記接続部は、携帯電話機を接続するインターフェースを備えていることを特徴とする地図表示装置。
【請求項7】
自車位置情報を取得する処理と、
取得した前記自車位置情報に基づいて自車位置を表示する処理と、
携帯情報端末の接続の有無を検出する処理と、
前記携帯情報端末が接続されたことを検出すると、前記携帯情報端末が取得した前記携帯情報端末についての位置情報を取得する処理と、
前記自車位置情報を取得できない場合に、前記携帯情報端末から取得した前記携帯情報端末についての位置情報に基づいて自車位置を表示させる処理とをコンピュータ上で実行するための地図表示プログラム。
【請求項1】
人工衛星から送信される送信波に基づいて位置情報を取得する位置情報取得手段と、
前記送信波に基づいて位置情報を取得する外部の位置情報取得装置から位置情報を入力する入力手段と、
前記位置情報取得手段で取得した位置情報および前記外部の位置情報取得装置から入力された位置情報のいずれか一方の位置情報により自己の位置を算出する算出手段を備えることを特徴とする地図表示装置。
【請求項2】
自車位置情報を取得する自車位置情報取得手段と、
前記自車位置情報取得手段で取得した前記自車位置情報に基づいて自車位置を表示する表示手段と、
位置情報の取得機能を有する携帯情報端末が接続される接続部と、
前記接続部への前記携帯情報端末の接続の有無を検出する検出手段と、
前記検出手段で前記携帯情報端末が前記接続部に接続されたことを検出すると、前記携帯情報端末が取得した前記携帯情報端末についての位置情報を取得する外部位置情報取得手段と、
前記自車位置情報取得手段で前記自車位置情報を取得できない場合に、前記外部位置情報取得手段で取得した前記携帯情報端末についての位置情報に基づいて自車位置を前記表示手段に表示させる自車位置表示制御手段とを備えることを特徴とする地図表示装置。
【請求項3】
請求項2に記載の地図表示装置において、
前記自車位置情報取得手段で取得した前記自車位置情報を記憶する記憶手段をさらに備え、
前記自車位置表示制御手段は、前記自車位置情報取得手段で前記自車位置情報を取得できない場合に、前記接続部に前記携帯情報端末が接続されていないことが前記検出手段で検出されると、前記記憶手段で記憶した前記自車位置情報に基づいて前記自車位置を前記表示部に表示させることを特徴とする地図表示装置。
【請求項4】
請求項2または請求項3に記載の地図表示装置において、
前記自車位置表示制御手段は、前記外部位置情報取得手段で取得した前記携帯情報端末についての位置情報に基づいて自車位置を前記表示手段に表示させた後、前記自車位置情報取得手段で前記自車位置情報を取得した場合には、前記自車位置情報取得手段で取得した前記自車位置情報に基づいて自車位置を前記表示手段に表示させることを特徴とする地図表示装置。
【請求項5】
請求項4に記載の地図表示装置において、
前記自車位置表示制御手段は、前記外部位置情報取得手段で取得した前記携帯情報端末についての位置情報に基づいて自車位置を前記表示手段に表示させた後、前記自車位置情報取得手段で前記自車位置情報を取得するまでは、前記外部位置情報取得手段で取得した前記携帯情報端末についての位置情報に基づいて前記表示手段に表示させる自車位置を更新することを特徴とする地図表示装置。
【請求項6】
請求項2〜5のいずれか一項に記載の地図表示装置において、
前記接続部は、携帯電話機を接続するインターフェースを備えていることを特徴とする地図表示装置。
【請求項7】
自車位置情報を取得する処理と、
取得した前記自車位置情報に基づいて自車位置を表示する処理と、
携帯情報端末の接続の有無を検出する処理と、
前記携帯情報端末が接続されたことを検出すると、前記携帯情報端末が取得した前記携帯情報端末についての位置情報を取得する処理と、
前記自車位置情報を取得できない場合に、前記携帯情報端末から取得した前記携帯情報端末についての位置情報に基づいて自車位置を表示させる処理とをコンピュータ上で実行するための地図表示プログラム。
【図1】


【図2】
【図2】
【公開番号】特開2008−20352(P2008−20352A)
【公開日】平成20年1月31日(2008.1.31)
【国際特許分類】
【出願番号】特願2006−193050(P2006−193050)
【出願日】平成18年7月13日(2006.7.13)
【出願人】(501348139)株式会社 エイチ・シー・エックス (86)
【出願人】(000005108)株式会社日立製作所 (27,607)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成20年1月31日(2008.1.31)
【国際特許分類】
【出願日】平成18年7月13日(2006.7.13)
【出願人】(501348139)株式会社 エイチ・シー・エックス (86)
【出願人】(000005108)株式会社日立製作所 (27,607)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]