
基板の給排装置及び基板の給排方法
【課題】 省スペース化や装置の負荷増大防止を図ることができ、基板の撓みに伴う弊害を解消することのできる基板の給排装置及び基板の給排方法を提供する。
【解決手段】 基板収納容器1に対して半導体ウェーハWを投入・払い出し装置20により給排する装置であって、基板収納容器1を、ベース板2上に半導体ウェーハWを収納する収納カセット3を備えた容器本体4と、容器本体4のベース板2に嵌合されて収納カセット3を被覆する被覆ケース5とから構成する。また、投入・払い出し装置20を、基板収納容器1を立てて搭載して半導体ウェーハWを起立させるロードポート21と、ロードポート21に搭載された基板収納容器1に対して進退動し、被覆ケース5に対して容器本体4を着脱する着脱搬送機構27と、被覆ケース5から取り外された容器本体4の半導体ウェーハWを突き上げる突き上げ機構30と、突き上げられた半導体ウェーハWをハンドリングするハンドリングロボット31とから構成する。
【解決手段】 基板収納容器1に対して半導体ウェーハWを投入・払い出し装置20により給排する装置であって、基板収納容器1を、ベース板2上に半導体ウェーハWを収納する収納カセット3を備えた容器本体4と、容器本体4のベース板2に嵌合されて収納カセット3を被覆する被覆ケース5とから構成する。また、投入・払い出し装置20を、基板収納容器1を立てて搭載して半導体ウェーハWを起立させるロードポート21と、ロードポート21に搭載された基板収納容器1に対して進退動し、被覆ケース5に対して容器本体4を着脱する着脱搬送機構27と、被覆ケース5から取り外された容器本体4の半導体ウェーハWを突き上げる突き上げ機構30と、突き上げられた半導体ウェーハWをハンドリングするハンドリングロボット31とから構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、薄く撓みやすい大口径の半導体ウェーハ等からなる基板を投入・払い出しする基板の給排装置及び基板の給排方法に関するものである。
【背景技術】
【0002】
半導体ウェーハは、現在、フロントオープンボックスタイプの基板収納容器に収納される口径300mmのタイプが主流である(特許文献1参照)が、将来的には、チップサイズの大型化と生産性の向上の観点から口径450mmのタイプに移行すると考えられている。このように半導体ウェーハが口径300mmから450mmのタイプに移行すると、その撓み量、重量、スペースが増大するので、フロントオープンボックスタイプの基板収納容器やその蓋体を開閉する蓋体開閉装置、及びハンドリングロボット等をそのまま使用することができなくなる。
【0003】
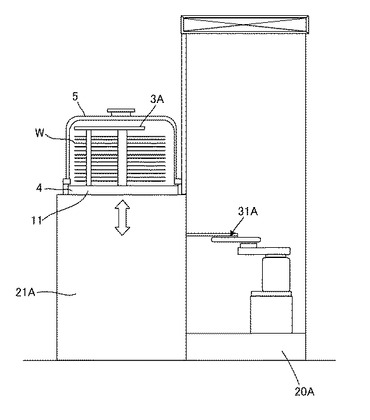
そこで、現在、450mmのタイプの半導体ウェーハWに対応可能な新しいシステムが模索されているが、その一つとして図6に示すシステムがあげられる。このシステムは、図6に示すように、投入・払い出し装置20Aのロードポート21Aにボトムオープンタイプで大型の基板収納容器1Aを水平に搭載し、この基板収納容器1Aに対して口径450mmの半導体ウェーハWを水平多関節のハンドリングロボット31Aにより水平に投入したり、払い出すようにしている。
【0004】
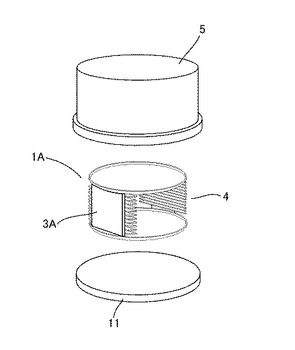
ボトムオープンタイプの基板収納容器1Aは、図7に示すように、底板11上に複数枚の半導体ウェーハWを上下多段に整列収納する収納カセット3Aを備えた容器本体4と、この容器本体4の底板11に上方から着脱自在に嵌合されて収納カセット3Aを被覆する被覆ケース5とを備えて構成され(特許文献2参照)、投入・払い出し装置20Aの昇降可能なロードポート21A上に底板11が水平に搭載される。
【特許文献1】特開2006‐216775号公報
【特許文献2】特公平7‐46694号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
450mmタイプの半導体ウェーハWに対応可能な新しいシステムは、以上のように構成され、ロードポート21Aに基板収納容器1Aを水平に搭載するので、大型の基板収納容器1Aを搭載するため、広いスペースが必要になり、しかも、装置の負荷が増大するおそれがある。また、基板収納容器1Aに対して半導体ウェーハWをハンドリングロボット31Aにより水平に投入したり、払い出すので、重い半導体ウェーハWが弓なりに撓んで他の半導体ウェーハWに干渉する事態や、ハンドリングロボット31Aのハンドが挿入時に半導体ウェーハWに干渉することにより、半導体ウェーハWを損傷するおそれが懸念される。
【0006】
このような懸念を解消するには、収納カセット3Aに収納された複数枚の半導体ウェーハW間のピッチを拡大すれば良いが、そうすると、収納カセット3Aが上下方向に高く長くなるので、基板収納容器1Aのさらなる大型化を招くこととなる。
【0007】
本発明は上記に鑑みなされたもので、省スペース化や装置の負荷の増大防止を図ることができ、しかも、基板の撓みに伴う弊害を解消することのできる基板の給排装置及び基板の給排方法を提供することを目的としている。
【課題を解決するための手段】
【0008】
本発明においては上記課題を解決するため、基板収納容器に対して基板を投入・払い出し装置により給排するものであって、
基板収納容器は、ベース板上に基板を収納する収納カセットを備えた容器本体と、この容器本体のベース板に着脱自在に嵌め合わされて収納カセットを被覆する被覆体とを含み、
投入・払い出し装置は、基板収納容器を立てて搭載して基板を起立させるロードポートと、このロードポートに搭載された基板収納容器に対して進退動し、基板収納容器の被覆体に対して容器本体を略水平に着脱する着脱搬送機構と、この着脱搬送機構により基板収納容器の被覆体から取り外された容器本体の基板を突き上げる突き上げ機構と、この突き上げ機構により突き上げられた基板をハンドリングするハンドリング機構とを含んでなることを特徴としている。
【0009】
なお、基板収納容器の収納カセットは、ベース板上に設けられて基板の後部と両側部を支持する複数の棚板と、この複数の棚板に設けられて基板に対向する抑え体とを含み、複数の棚板の間に空間を形成することが好ましい。
また、ハンドリング機構を、突き上げられた基板の周縁部をクランプするハンドリングロボットとすることが好ましい。
【0010】
また、本発明においては上記課題を解決するため、請求項1、2、又は3記載の基板の給排装置を使用して基板収納容器に対し基板を給排することを特徴としている。
【0011】
ここで、特許請求の範囲における基板には、少なくとも単数複数の半導体ウェーハ、液晶基板、ガラス基板等が含まれる。基板が半導体ウェーハの場合、口径450mmタイプが主ではあるが、口径200mmや300mmのタイプ等でも良い。また、ベース板は、円板形でも良いし、多角形や矩形の板等でも良い。突き上げ機構やハンドリング機構は、単数複数を特に問うものではない。
【0012】
本発明によれば、基板収納容器から基板を排出する場合には、投入・払い出し装置のロードポート上に基板収納容器を立てて搭載し、収納カセットの開口側を上方向に向けるとともに、収納カセット内の基板を縦方向に指向させる。すると、投入・払い出し装置の着脱搬送機構が基板収納容器の容器本体を保持し、この着脱搬送機構が進退動して被覆体から容器本体を取り外して引き離す。こうして被覆体から容器本体が引き離されると、突き上げ機構が上昇して収納カセットの基板に干渉し、基板が上昇した後、ハンドリング機構が基板に干渉してハンドリングし、基板が排出される。
【0013】
これに対し、基板収納容器に基板を供給する場合には、容器本体の収納カセット内に基板がハンドリング機構により上方から収納され、着脱搬送機構がロードポート側に移動して被覆体に容器本体を組み合わせ、この組み合わせにより、基板収納容器に基板が供給される。
【発明の効果】
【0014】
本発明によれば、省スペース化や装置の負荷の増大防止を図ることができ、しかも、基板の撓みに伴う弊害を解消することができるという効果がある。
また、基板収納容器の収納カセットを、ベース板上に設けられて基板の後部と両側部を支持する複数の棚板と、この複数の棚板に設けられて基板に対向する抑え体とから構成し、複数の棚板の間に空間を形成すれば、突き上げ機構により基板を円滑に突き上げることができる。
【0015】
また、ハンドリング機構を、突き上げられた基板の周縁部をクランプするハンドリングロボットとすれば、容器本体内の基板間のピッチを拡大することなく、基板を円滑に供給したり、排出することができる。
【発明を実施するための最良の形態】
【0016】
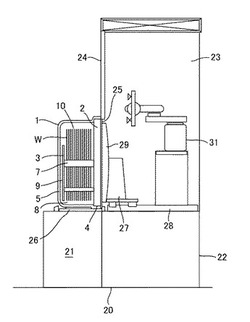
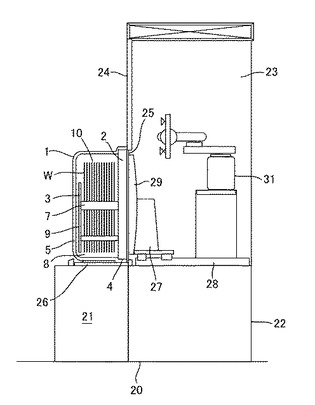
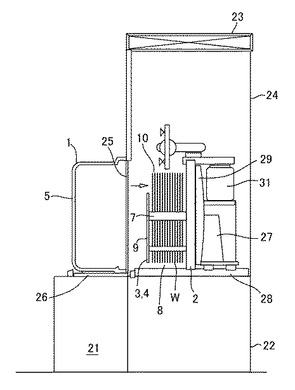
以下、図面を参照して本発明の好ましい実施の形態を説明すると、本実施形態における基板の給排装置は、図1ないし図5に示すように、基板収納容器1を起立させた状態で搭載する投入・払い出し装置20を備え、この投入・払い出し装置20のロードポート21上に基板収納容器1を起立させて搭載し、この基板収納容器1に対して口径450mmの薄く丸い半導体ウェーハWを突き上げ機構30と多関節のハンドリングロボット31とにより投入したり、払い出すようにしている。
【0017】
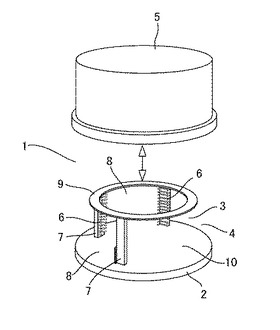
基板収納容器1は、図1や図2に示すように、円板のベース板2上に複数枚(例えば13枚)の半導体ウェーハWを多段に整列収納する収納カセット3を備えた容器本体4と、この容器本体4のベース板2に上方から着脱自在に嵌合されて収納カセット3を被覆する被覆ケース5とを備え、使用状況や必要に応じ、水平状態で使用されたり、起立状態で使用される。
【0018】
収納カセット3は、図1や図2に示すように、ベース板2上に間隔をおき立設されて半導体ウェーハWの後部周縁と両側部周縁とをそれぞれ保持溝6により嵌合支持する複数の棚板7を備え、この複数の棚板7の間には、突き上げ機構30用の挿入空間8が複数区画され、複数の棚板7の上部には、半導体ウェーハWの表面に対向する保護用の抑えリング9が一体形成されており、正面側(図1の上方向、図2の右方向)10から半導体ウェーハWが出し入れされる。
【0019】
各棚板7は、半導体ウェーハWの形状に対応するよう略半円弧形の縦長の板に湾曲形成され、半導体ウェーハWに対向する内面には、断面略U字形あるいは略V字形の保持溝6が上下方向に所定のピッチで複数並設される。
【0020】
被覆ケース5は、図2に示すように、中空円柱形の断面略ハット形に形成され、周面の一部には複数の位置決め具が配設されており、半導体ウェーハWの投入・払い出し時にベース板2から取り外される。この被覆ケース5の天井中央部には、搬送用のフランジが選択的に装着される。
【0021】
投入・払い出し装置20は、図1に示すように、基板収納容器1を起立させて搭載し、半導体ウェーハWを上下方向に向けるロードポート21と、このロードポート21に搭載された基板収納容器1に対して水平に進退動し、被覆ケース5に対して容器本体4を水平に着脱する着脱搬送機構27と、この着脱搬送機構27により被覆ケース5から取り外された容器本体4内の半導体ウェーハWを垂直上方に突き上げる突き上げ機構30と、この突き上げ機構30により垂直上方に突き上げられた半導体ウェーハWをハンドリングするエッジクランプ式のハンドリングロボット31とを備えて構成される。
【0022】
ロードポート21は、図1に示すように、略同じ高さの架台22が隣接して設置され、この架台22上には、基板収納容器1よりも大きい作業ステージ23が透明の特殊ガラスからなる複数のパネル24により区画形成されており、この透明のパネル24の一部には、起立した基板収納容器1の容器本体4に対向する連通口25が開口して形成される。
【0023】
ロードポート21の略平坦な上部には、被覆ケース5の複数の位置決め具に嵌合接触する位置決め機構26が配設され、この位置決め機構26が基板収納容器1の被覆ケース5を起立させて位置決め固定するよう機能する。また、架台22上の作業ステージ23は、着脱搬送機構27、突き上げ機構30、及びハンドリングロボット31が配設され、ダウンフローのエアが流下しやすい構造に構成される。
【0024】
着脱搬送機構27は、同図に示すように、架台22上に複数のガイドレール28を介して搭載支持され、架台22内のモータの駆動に伴うスクリュー螺子の回転により水平にスライドし、ロードポート21に搭載された基板収納容器1に対して連通口25を介し進出したり、後退する。この着脱搬送機構27には、容器本体4の底面を真空吸着する吸着機構29が配設される。
【0025】
突き上げ機構30は、図5に示すように、架台22に内蔵され、この架台22内の歯車機構や螺子機構等の駆動に基づいて昇降し、半導体ウェーハWの下部周縁に干渉して上昇させるよう機能する。また、ハンドリングロボット31は、図1に示すように、架台22上に回転可能、かつ昇降可能に設置され、突き上げ機構30により突き上げられた半導体ウェーハWの上部周縁に干渉してハンドリングし、半導体ウェーハWを投入、排出、移載するよう機能する。
【0026】
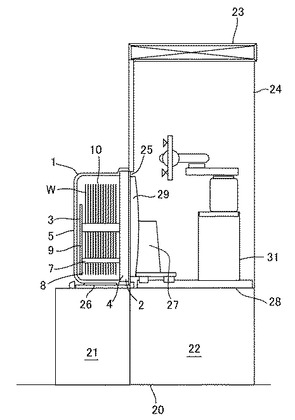
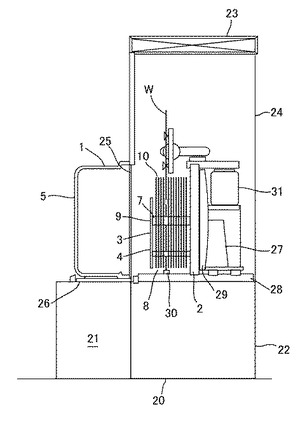
上記において、基板収納容器1から口径450mmの半導体ウェーハWを払い出す場合には、投入・払い出し装置20のロードポート21上に基板収納容器1を水平ではなく、起立させて位置決め搭載し、パネル24の連通口25や着脱搬送機構27の吸着機構29に基板収納容器1の容器本体4を対向させ、収納カセット3の正面側10を上方向に向けるとともに、半導体ウェーハWを起立させる(図3参照)。
【0027】
すると、光学センサの検知等に基づき、着脱搬送機構27が基板収納容器1の容器本体4底面を連通口25を介して吸着し、この着脱搬送機構27が反ロードポート21側にスライドして被覆ケース5から容器本体4を取り外して離隔させ、作業ステージ23に収納カセット3と半導体ウェーハWとが移動する(図4参照)。
【0028】
作業ステージ23に収納カセット3と半導体ウェーハWとが移動すると、二股の突き上げ機構30が上昇して収納カセット3に収納された半導体ウェーハWの下部周縁に挿入空間8を介し干渉し、半導体ウェーハWが上昇して収納カセット3から飛び出し、その後、ハンドリングロボット31が半導体ウェーハWの上部周縁に干渉してハンドリングし、半導体ウェーハWが排出され、移載される(図5参照)。
【0029】
突き上げ機構30が半導体ウェーハWの下部周縁に干渉する際、複数の棚板7の間に突き上げ機構30用の挿入空間8が区画されるので、棚板7と突き上げ機構30とが衝突することがなく、突き上げ機構30の干渉に何ら支障を来たすことがない。
【0030】
これに対し、基板収納容器1に半導体ウェーハWを投入する場合には、突き上げ機構30の突き上げを除き、上記作業と逆の作業が行われる。すなわち、作業ステージ23の収納カセット3に半導体ウェーハWがハンドリングロボット31により垂直上方から挿入して収納され、容器本体4を吸着保持する着脱搬送機構27がロードポート21側にスライドして対向する被覆ケース5の開口部に容器本体4を連通口25を介し嵌合し、この嵌合により、基板収納容器1に半導体ウェーハWが投入される。
【0031】
上記構成によれば、ロードポート21に基板収納容器1を水平ではなく、立てて搭載するので、基板収納容器1が大型でも省スペースや効率化が可能になり、装置の負荷増大のおそれを有効に排除することができる。また、基板収納容器1に対して半導体ウェーハWをハンドリングロボット31により垂直に投入したり、払い出すので、半導体ウェーハWの下方向の撓みが減少し、他の半導体ウェーハWに干渉する事態や、ハンドリングロボット31のハンドが挿入時に半導体ウェーハWに干渉することにより、半導体ウェーハWの損傷を招くおそれがない。したがって、収納カセット3に収納された複数枚の半導体ウェーハW間のピッチを拡大する必要もない。
【0032】
また、半導体ウェーハWを垂直上方に突き出すので、ハンドリングスペースを大きく確保することができる。さらに、着脱搬送機構27により半導体ウェーハWの突き上げ位置やハンドリング位置を任意に調整することができるので、ハンドリングロボット31の動作の簡素化が大いに期待できる。さらにまた、ハンドリングロボット31が半導体ウェーハWの中央部ではなく、上部周縁をハンドリングするので、半導体ウェーハW間のピッチを拡大することなく、半導体ウェーハWの円滑なハンドリングや移載が大いに期待できる。
【0033】
なお、上記実施形態では被覆ケース5を単に示したが、被覆ケース5の形状をベース板2の形状に応じて変更したり、被覆ケース5を透明や半透明に形成しても良い。また、着脱搬送機構27をリニアモータによりスライドさせても良い。また、着脱搬送機構27に、基板収納容器1の容器本体4底面を複数の保持爪等により保持する保持機構を吸着機構29の代わりに配設しても良い。さらに、突き上げ機構30をエアシリンダ等のシリンダにより昇降させても良い。
【図面の簡単な説明】
【0034】
【図1】本発明に係る基板の給排装置及び基板の給排方法の実施形態を模式的に示す側面説明図である。
【図2】本発明に係る基板の給排装置及び基板の給排方法の実施形態における基板収納容器を模式的に示す分解斜視説明図である。
【図3】本発明に係る基板の給排装置及び基板の給排方法の実施形態におけるロードポート上に基板収納容器を起立させて搭載し、半導体ウェーハを起立させた状態を模式的に示す側面説明図である。
【図4】図3の着脱搬送機構がスライドして被覆ケースから容器本体を取り外した状態を模式的に示す側面説明図である。
【図5】図4の突き上げ機構が上昇して半導体ウェーハの下部に干渉し、ハンドリングロボットが半導体ウェーハの上部に干渉してハンドリングする状態を模式的に示す側面説明図である。
【図6】450mmのタイプの半導体ウェーハに対応可能な一システムを示す側面説明図である。
【図7】ボトムオープンタイプの基板収納容器を示す分解斜視説明図である。
【符号の説明】
【0035】
1 基板収納容器
1A 基板収納容器
2 ベース板
3 収納カセット
4 容器本体
5 被覆ケース(被覆体)
7 棚板
8 挿入空間(空間)
9 抑えリング(抑え体)
10 正面側
20 投入・払い出し装置
20A 投入・払い出し装置
21 ロードポート
27 着脱搬送機構
30 突き上げ機構
31 ハンドリングロボット(ハンドリング機構)
W 半導体ウェーハ(基板)
【技術分野】
【0001】
本発明は、薄く撓みやすい大口径の半導体ウェーハ等からなる基板を投入・払い出しする基板の給排装置及び基板の給排方法に関するものである。
【背景技術】
【0002】
半導体ウェーハは、現在、フロントオープンボックスタイプの基板収納容器に収納される口径300mmのタイプが主流である(特許文献1参照)が、将来的には、チップサイズの大型化と生産性の向上の観点から口径450mmのタイプに移行すると考えられている。このように半導体ウェーハが口径300mmから450mmのタイプに移行すると、その撓み量、重量、スペースが増大するので、フロントオープンボックスタイプの基板収納容器やその蓋体を開閉する蓋体開閉装置、及びハンドリングロボット等をそのまま使用することができなくなる。
【0003】
そこで、現在、450mmのタイプの半導体ウェーハWに対応可能な新しいシステムが模索されているが、その一つとして図6に示すシステムがあげられる。このシステムは、図6に示すように、投入・払い出し装置20Aのロードポート21Aにボトムオープンタイプで大型の基板収納容器1Aを水平に搭載し、この基板収納容器1Aに対して口径450mmの半導体ウェーハWを水平多関節のハンドリングロボット31Aにより水平に投入したり、払い出すようにしている。
【0004】
ボトムオープンタイプの基板収納容器1Aは、図7に示すように、底板11上に複数枚の半導体ウェーハWを上下多段に整列収納する収納カセット3Aを備えた容器本体4と、この容器本体4の底板11に上方から着脱自在に嵌合されて収納カセット3Aを被覆する被覆ケース5とを備えて構成され(特許文献2参照)、投入・払い出し装置20Aの昇降可能なロードポート21A上に底板11が水平に搭載される。
【特許文献1】特開2006‐216775号公報
【特許文献2】特公平7‐46694号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
450mmタイプの半導体ウェーハWに対応可能な新しいシステムは、以上のように構成され、ロードポート21Aに基板収納容器1Aを水平に搭載するので、大型の基板収納容器1Aを搭載するため、広いスペースが必要になり、しかも、装置の負荷が増大するおそれがある。また、基板収納容器1Aに対して半導体ウェーハWをハンドリングロボット31Aにより水平に投入したり、払い出すので、重い半導体ウェーハWが弓なりに撓んで他の半導体ウェーハWに干渉する事態や、ハンドリングロボット31Aのハンドが挿入時に半導体ウェーハWに干渉することにより、半導体ウェーハWを損傷するおそれが懸念される。
【0006】
このような懸念を解消するには、収納カセット3Aに収納された複数枚の半導体ウェーハW間のピッチを拡大すれば良いが、そうすると、収納カセット3Aが上下方向に高く長くなるので、基板収納容器1Aのさらなる大型化を招くこととなる。
【0007】
本発明は上記に鑑みなされたもので、省スペース化や装置の負荷の増大防止を図ることができ、しかも、基板の撓みに伴う弊害を解消することのできる基板の給排装置及び基板の給排方法を提供することを目的としている。
【課題を解決するための手段】
【0008】
本発明においては上記課題を解決するため、基板収納容器に対して基板を投入・払い出し装置により給排するものであって、
基板収納容器は、ベース板上に基板を収納する収納カセットを備えた容器本体と、この容器本体のベース板に着脱自在に嵌め合わされて収納カセットを被覆する被覆体とを含み、
投入・払い出し装置は、基板収納容器を立てて搭載して基板を起立させるロードポートと、このロードポートに搭載された基板収納容器に対して進退動し、基板収納容器の被覆体に対して容器本体を略水平に着脱する着脱搬送機構と、この着脱搬送機構により基板収納容器の被覆体から取り外された容器本体の基板を突き上げる突き上げ機構と、この突き上げ機構により突き上げられた基板をハンドリングするハンドリング機構とを含んでなることを特徴としている。
【0009】
なお、基板収納容器の収納カセットは、ベース板上に設けられて基板の後部と両側部を支持する複数の棚板と、この複数の棚板に設けられて基板に対向する抑え体とを含み、複数の棚板の間に空間を形成することが好ましい。
また、ハンドリング機構を、突き上げられた基板の周縁部をクランプするハンドリングロボットとすることが好ましい。
【0010】
また、本発明においては上記課題を解決するため、請求項1、2、又は3記載の基板の給排装置を使用して基板収納容器に対し基板を給排することを特徴としている。
【0011】
ここで、特許請求の範囲における基板には、少なくとも単数複数の半導体ウェーハ、液晶基板、ガラス基板等が含まれる。基板が半導体ウェーハの場合、口径450mmタイプが主ではあるが、口径200mmや300mmのタイプ等でも良い。また、ベース板は、円板形でも良いし、多角形や矩形の板等でも良い。突き上げ機構やハンドリング機構は、単数複数を特に問うものではない。
【0012】
本発明によれば、基板収納容器から基板を排出する場合には、投入・払い出し装置のロードポート上に基板収納容器を立てて搭載し、収納カセットの開口側を上方向に向けるとともに、収納カセット内の基板を縦方向に指向させる。すると、投入・払い出し装置の着脱搬送機構が基板収納容器の容器本体を保持し、この着脱搬送機構が進退動して被覆体から容器本体を取り外して引き離す。こうして被覆体から容器本体が引き離されると、突き上げ機構が上昇して収納カセットの基板に干渉し、基板が上昇した後、ハンドリング機構が基板に干渉してハンドリングし、基板が排出される。
【0013】
これに対し、基板収納容器に基板を供給する場合には、容器本体の収納カセット内に基板がハンドリング機構により上方から収納され、着脱搬送機構がロードポート側に移動して被覆体に容器本体を組み合わせ、この組み合わせにより、基板収納容器に基板が供給される。
【発明の効果】
【0014】
本発明によれば、省スペース化や装置の負荷の増大防止を図ることができ、しかも、基板の撓みに伴う弊害を解消することができるという効果がある。
また、基板収納容器の収納カセットを、ベース板上に設けられて基板の後部と両側部を支持する複数の棚板と、この複数の棚板に設けられて基板に対向する抑え体とから構成し、複数の棚板の間に空間を形成すれば、突き上げ機構により基板を円滑に突き上げることができる。
【0015】
また、ハンドリング機構を、突き上げられた基板の周縁部をクランプするハンドリングロボットとすれば、容器本体内の基板間のピッチを拡大することなく、基板を円滑に供給したり、排出することができる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照して本発明の好ましい実施の形態を説明すると、本実施形態における基板の給排装置は、図1ないし図5に示すように、基板収納容器1を起立させた状態で搭載する投入・払い出し装置20を備え、この投入・払い出し装置20のロードポート21上に基板収納容器1を起立させて搭載し、この基板収納容器1に対して口径450mmの薄く丸い半導体ウェーハWを突き上げ機構30と多関節のハンドリングロボット31とにより投入したり、払い出すようにしている。
【0017】
基板収納容器1は、図1や図2に示すように、円板のベース板2上に複数枚(例えば13枚)の半導体ウェーハWを多段に整列収納する収納カセット3を備えた容器本体4と、この容器本体4のベース板2に上方から着脱自在に嵌合されて収納カセット3を被覆する被覆ケース5とを備え、使用状況や必要に応じ、水平状態で使用されたり、起立状態で使用される。
【0018】
収納カセット3は、図1や図2に示すように、ベース板2上に間隔をおき立設されて半導体ウェーハWの後部周縁と両側部周縁とをそれぞれ保持溝6により嵌合支持する複数の棚板7を備え、この複数の棚板7の間には、突き上げ機構30用の挿入空間8が複数区画され、複数の棚板7の上部には、半導体ウェーハWの表面に対向する保護用の抑えリング9が一体形成されており、正面側(図1の上方向、図2の右方向)10から半導体ウェーハWが出し入れされる。
【0019】
各棚板7は、半導体ウェーハWの形状に対応するよう略半円弧形の縦長の板に湾曲形成され、半導体ウェーハWに対向する内面には、断面略U字形あるいは略V字形の保持溝6が上下方向に所定のピッチで複数並設される。
【0020】
被覆ケース5は、図2に示すように、中空円柱形の断面略ハット形に形成され、周面の一部には複数の位置決め具が配設されており、半導体ウェーハWの投入・払い出し時にベース板2から取り外される。この被覆ケース5の天井中央部には、搬送用のフランジが選択的に装着される。
【0021】
投入・払い出し装置20は、図1に示すように、基板収納容器1を起立させて搭載し、半導体ウェーハWを上下方向に向けるロードポート21と、このロードポート21に搭載された基板収納容器1に対して水平に進退動し、被覆ケース5に対して容器本体4を水平に着脱する着脱搬送機構27と、この着脱搬送機構27により被覆ケース5から取り外された容器本体4内の半導体ウェーハWを垂直上方に突き上げる突き上げ機構30と、この突き上げ機構30により垂直上方に突き上げられた半導体ウェーハWをハンドリングするエッジクランプ式のハンドリングロボット31とを備えて構成される。
【0022】
ロードポート21は、図1に示すように、略同じ高さの架台22が隣接して設置され、この架台22上には、基板収納容器1よりも大きい作業ステージ23が透明の特殊ガラスからなる複数のパネル24により区画形成されており、この透明のパネル24の一部には、起立した基板収納容器1の容器本体4に対向する連通口25が開口して形成される。
【0023】
ロードポート21の略平坦な上部には、被覆ケース5の複数の位置決め具に嵌合接触する位置決め機構26が配設され、この位置決め機構26が基板収納容器1の被覆ケース5を起立させて位置決め固定するよう機能する。また、架台22上の作業ステージ23は、着脱搬送機構27、突き上げ機構30、及びハンドリングロボット31が配設され、ダウンフローのエアが流下しやすい構造に構成される。
【0024】
着脱搬送機構27は、同図に示すように、架台22上に複数のガイドレール28を介して搭載支持され、架台22内のモータの駆動に伴うスクリュー螺子の回転により水平にスライドし、ロードポート21に搭載された基板収納容器1に対して連通口25を介し進出したり、後退する。この着脱搬送機構27には、容器本体4の底面を真空吸着する吸着機構29が配設される。
【0025】
突き上げ機構30は、図5に示すように、架台22に内蔵され、この架台22内の歯車機構や螺子機構等の駆動に基づいて昇降し、半導体ウェーハWの下部周縁に干渉して上昇させるよう機能する。また、ハンドリングロボット31は、図1に示すように、架台22上に回転可能、かつ昇降可能に設置され、突き上げ機構30により突き上げられた半導体ウェーハWの上部周縁に干渉してハンドリングし、半導体ウェーハWを投入、排出、移載するよう機能する。
【0026】
上記において、基板収納容器1から口径450mmの半導体ウェーハWを払い出す場合には、投入・払い出し装置20のロードポート21上に基板収納容器1を水平ではなく、起立させて位置決め搭載し、パネル24の連通口25や着脱搬送機構27の吸着機構29に基板収納容器1の容器本体4を対向させ、収納カセット3の正面側10を上方向に向けるとともに、半導体ウェーハWを起立させる(図3参照)。
【0027】
すると、光学センサの検知等に基づき、着脱搬送機構27が基板収納容器1の容器本体4底面を連通口25を介して吸着し、この着脱搬送機構27が反ロードポート21側にスライドして被覆ケース5から容器本体4を取り外して離隔させ、作業ステージ23に収納カセット3と半導体ウェーハWとが移動する(図4参照)。
【0028】
作業ステージ23に収納カセット3と半導体ウェーハWとが移動すると、二股の突き上げ機構30が上昇して収納カセット3に収納された半導体ウェーハWの下部周縁に挿入空間8を介し干渉し、半導体ウェーハWが上昇して収納カセット3から飛び出し、その後、ハンドリングロボット31が半導体ウェーハWの上部周縁に干渉してハンドリングし、半導体ウェーハWが排出され、移載される(図5参照)。
【0029】
突き上げ機構30が半導体ウェーハWの下部周縁に干渉する際、複数の棚板7の間に突き上げ機構30用の挿入空間8が区画されるので、棚板7と突き上げ機構30とが衝突することがなく、突き上げ機構30の干渉に何ら支障を来たすことがない。
【0030】
これに対し、基板収納容器1に半導体ウェーハWを投入する場合には、突き上げ機構30の突き上げを除き、上記作業と逆の作業が行われる。すなわち、作業ステージ23の収納カセット3に半導体ウェーハWがハンドリングロボット31により垂直上方から挿入して収納され、容器本体4を吸着保持する着脱搬送機構27がロードポート21側にスライドして対向する被覆ケース5の開口部に容器本体4を連通口25を介し嵌合し、この嵌合により、基板収納容器1に半導体ウェーハWが投入される。
【0031】
上記構成によれば、ロードポート21に基板収納容器1を水平ではなく、立てて搭載するので、基板収納容器1が大型でも省スペースや効率化が可能になり、装置の負荷増大のおそれを有効に排除することができる。また、基板収納容器1に対して半導体ウェーハWをハンドリングロボット31により垂直に投入したり、払い出すので、半導体ウェーハWの下方向の撓みが減少し、他の半導体ウェーハWに干渉する事態や、ハンドリングロボット31のハンドが挿入時に半導体ウェーハWに干渉することにより、半導体ウェーハWの損傷を招くおそれがない。したがって、収納カセット3に収納された複数枚の半導体ウェーハW間のピッチを拡大する必要もない。
【0032】
また、半導体ウェーハWを垂直上方に突き出すので、ハンドリングスペースを大きく確保することができる。さらに、着脱搬送機構27により半導体ウェーハWの突き上げ位置やハンドリング位置を任意に調整することができるので、ハンドリングロボット31の動作の簡素化が大いに期待できる。さらにまた、ハンドリングロボット31が半導体ウェーハWの中央部ではなく、上部周縁をハンドリングするので、半導体ウェーハW間のピッチを拡大することなく、半導体ウェーハWの円滑なハンドリングや移載が大いに期待できる。
【0033】
なお、上記実施形態では被覆ケース5を単に示したが、被覆ケース5の形状をベース板2の形状に応じて変更したり、被覆ケース5を透明や半透明に形成しても良い。また、着脱搬送機構27をリニアモータによりスライドさせても良い。また、着脱搬送機構27に、基板収納容器1の容器本体4底面を複数の保持爪等により保持する保持機構を吸着機構29の代わりに配設しても良い。さらに、突き上げ機構30をエアシリンダ等のシリンダにより昇降させても良い。
【図面の簡単な説明】
【0034】
【図1】本発明に係る基板の給排装置及び基板の給排方法の実施形態を模式的に示す側面説明図である。
【図2】本発明に係る基板の給排装置及び基板の給排方法の実施形態における基板収納容器を模式的に示す分解斜視説明図である。
【図3】本発明に係る基板の給排装置及び基板の給排方法の実施形態におけるロードポート上に基板収納容器を起立させて搭載し、半導体ウェーハを起立させた状態を模式的に示す側面説明図である。
【図4】図3の着脱搬送機構がスライドして被覆ケースから容器本体を取り外した状態を模式的に示す側面説明図である。
【図5】図4の突き上げ機構が上昇して半導体ウェーハの下部に干渉し、ハンドリングロボットが半導体ウェーハの上部に干渉してハンドリングする状態を模式的に示す側面説明図である。
【図6】450mmのタイプの半導体ウェーハに対応可能な一システムを示す側面説明図である。
【図7】ボトムオープンタイプの基板収納容器を示す分解斜視説明図である。
【符号の説明】
【0035】
1 基板収納容器
1A 基板収納容器
2 ベース板
3 収納カセット
4 容器本体
5 被覆ケース(被覆体)
7 棚板
8 挿入空間(空間)
9 抑えリング(抑え体)
10 正面側
20 投入・払い出し装置
20A 投入・払い出し装置
21 ロードポート
27 着脱搬送機構
30 突き上げ機構
31 ハンドリングロボット(ハンドリング機構)
W 半導体ウェーハ(基板)
【特許請求の範囲】
【請求項1】
基板収納容器に対して基板を投入・払い出し装置により給排する基板の給排装置であって、
基板収納容器は、ベース板上に基板を収納する収納カセットを備えた容器本体と、この容器本体のベース板に着脱自在に嵌め合わされて収納カセットを被覆する被覆体とを含み、
投入・払い出し装置は、基板収納容器を立てて搭載して基板を起立させるロードポートと、このロードポートに搭載された基板収納容器に対して進退動し、基板収納容器の被覆体に対して容器本体を略水平に着脱する着脱搬送機構と、この着脱搬送機構により基板収納容器の被覆体から取り外された容器本体の基板を突き上げる突き上げ機構と、この突き上げ機構により突き上げられた基板をハンドリングするハンドリング機構とを含んでなることを特徴とする基板の給排装置。
【請求項2】
基板収納容器の収納カセットは、ベース板上に設けられて基板の後部と両側部を支持する複数の棚板と、この複数の棚板に設けられて基板に対向する抑え体とを含み、複数の棚板の間に空間を形成した請求項1記載の基板の給排装置。
【請求項3】
ハンドリング機構を、突き上げられた基板の周縁部をクランプするハンドリングロボットとした請求項1又は2記載の基板の給排装置。
【請求項4】
請求項1、2、又は3記載の基板の給排装置を使用して基板収納容器に対し基板を給排することを特徴とする基板の給排方法。
【請求項1】
基板収納容器に対して基板を投入・払い出し装置により給排する基板の給排装置であって、
基板収納容器は、ベース板上に基板を収納する収納カセットを備えた容器本体と、この容器本体のベース板に着脱自在に嵌め合わされて収納カセットを被覆する被覆体とを含み、
投入・払い出し装置は、基板収納容器を立てて搭載して基板を起立させるロードポートと、このロードポートに搭載された基板収納容器に対して進退動し、基板収納容器の被覆体に対して容器本体を略水平に着脱する着脱搬送機構と、この着脱搬送機構により基板収納容器の被覆体から取り外された容器本体の基板を突き上げる突き上げ機構と、この突き上げ機構により突き上げられた基板をハンドリングするハンドリング機構とを含んでなることを特徴とする基板の給排装置。
【請求項2】
基板収納容器の収納カセットは、ベース板上に設けられて基板の後部と両側部を支持する複数の棚板と、この複数の棚板に設けられて基板に対向する抑え体とを含み、複数の棚板の間に空間を形成した請求項1記載の基板の給排装置。
【請求項3】
ハンドリング機構を、突き上げられた基板の周縁部をクランプするハンドリングロボットとした請求項1又は2記載の基板の給排装置。
【請求項4】
請求項1、2、又は3記載の基板の給排装置を使用して基板収納容器に対し基板を給排することを特徴とする基板の給排方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−108823(P2008−108823A)
【公開日】平成20年5月8日(2008.5.8)
【国際特許分類】
【出願番号】特願2006−288648(P2006−288648)
【出願日】平成18年10月24日(2006.10.24)
【出願人】(000190116)信越ポリマー株式会社 (1,394)
【Fターム(参考)】
【公開日】平成20年5月8日(2008.5.8)
【国際特許分類】
【出願日】平成18年10月24日(2006.10.24)
【出願人】(000190116)信越ポリマー株式会社 (1,394)
【Fターム(参考)】
[ Back to top ]