
外科手術用ステープル留め装置
【課題】外科手術用ステープル留め装置を提供すること。
【解決手段】ステープル形成凹部を規定するアンビルアセンブリ506;ならびにカートリッジアセンブリ514であって、該アンビルアセンブリおよび該カートリッジアセンブリのうちの少なくとも一方は、他方に対して開位置とクランプ位置との間で旋回可能であり、該カートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを備え、該第一の複数のステープルは最初、該カートリッジアセンブリからの排出のために、該アンビルアセンブリの該ステープル形成凹部と整列して位置し、該第二の複数のステープルは、該アンビルアセンブリの該ステープル形成凹部と整列しない第一の位置から該ステープル形成凹部と整列した第二の位置へと移動可能であるように、該カートリッジアセンブリ内に支持されている、カートリッジアセンブリ、を備える、外科手術用ステープラー。
【解決手段】ステープル形成凹部を規定するアンビルアセンブリ506;ならびにカートリッジアセンブリ514であって、該アンビルアセンブリおよび該カートリッジアセンブリのうちの少なくとも一方は、他方に対して開位置とクランプ位置との間で旋回可能であり、該カートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを備え、該第一の複数のステープルは最初、該カートリッジアセンブリからの排出のために、該アンビルアセンブリの該ステープル形成凹部と整列して位置し、該第二の複数のステープルは、該アンビルアセンブリの該ステープル形成凹部と整列しない第一の位置から該ステープル形成凹部と整列した第二の位置へと移動可能であるように、該カートリッジアセンブリ内に支持されている、カートリッジアセンブリ、を備える、外科手術用ステープラー。
【発明の詳細な説明】
【技術分野】
【0001】
(背景)
(技術分野)
本願は、外科手術用ステープル留め装置に関し、そしてより特定すると、連続的に複数の外科手術用ファスナーを身体組織に付け、そして固定された組織を切開するための、再装填可能な複数発射の内視鏡外科手術用ステープル留め装置に関する。
【背景技術】
【0002】
(関連技術の背景)
組織が最初に、対向する顎構造体の間に把持またはクランプされ、次いで外科手術用ファスナーにより接合される外科手術用デバイスは、当該分野において周知である。いくつかの器具において、ナイフが、これらのファスナーにより接合された組織を切断するために提供される。これらのファスナーは代表的に、外科手術用ステープルの形態であるが、二部品のポリマーファスナーもまた利用され得る。
【0003】
この目的のための器具は、2つの細長部材を備え、これらの部材はそれぞれ、組織を捕捉またはクランプするために使用される。代表的に、これらの部材のうちの一方は、少なくとも2列に横に並んで整列した複数のステープルを収容するステープルカートリッジを備え、一方で、他方の部材は、これらのステープルがこのステープルカートリッジから駆動されるとステープルレッグを形成するための表面を規定する、アンビルを有する。一般に、ステープル留め操作は、このステープルカートリッジを通って長手軸方向に移動するカム棒によって行われ、これらのカム棒は、ステープルプッシャーに作用してこれらのステープルをこのステープルカートリッジから連続的に排出する。ナイフは、これらのステープル列の間を移動して、ステープル留めされた組織を、これらのステープル列の間で長手軸方向に切断および/または切開し得る。
【0004】
内視鏡手順または腹腔鏡手順において、外科手術は、小さい切開を通して、または皮膚の小さい入口創傷もしくは開口部に挿入された狭いカニューレを通して、行われる。内視鏡および/または腹腔鏡外科手術手順の特殊な必要性を満たす目的で、内視鏡外科手術用ステープル留めデバイスが開発されている。
【0005】
現在の内視鏡用ステープル留めデバイスは、単回使用装填ユニット(「SULU」)、または単回使用もしくは単回発射構成要素として構成された使い捨てステープルカートリッジと一緒に作動するように構成されている。従って、通常の手術中に、外科医は、1回の内視鏡外科手術手順を実施するために、数個のSULUまたはカートリッジを利用する必要があり得る(例えば、複数回の発射が必要とされる場合)。各連続した発射のために、外科医は、使用済み構成要素を新しい構成要素と交換する目的で、ステープル留めデバイスを最初の外科手術部位から取り除かなければならない。1回の手順の経過中にステープル留めデバイスを繰り返し取り除き、そして手で再装填することは、この内視鏡外科手術手順に付随する時間、複雑さおよび全体的な費用を増大させる。
【0006】
従って、複数回の発射のために構成され、従って引き続く発射のためのデバイスを手で再装填する目的でデバイスを内部外科手術部位から取り除く必要性を除いた、外科手術用ステープル留めデバイスおよび対応する装填ユニットを提供することが有利である。
【発明の概要】
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、例えば、以下を提供する:
(項目1)
ステープル形成凹部を規定するアンビルアセンブリ;ならびに
カートリッジアセンブリであって、該アンビルアセンブリおよび該カートリッジアセンブリのうちの少なくとも一方は、他方に対して開位置とクランプ位置との間で旋回可能であり、該カートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを備え、該第一の複数のステープルは最初、該カートリッジアセンブリからの排出のために、該アンビルアセンブリの該ステープル形成凹部と整列して位置し、該第二の複数のステープルは、該アンビルアセンブリの該ステープル形成凹部と整列しない第一の位置から、該カートリッジアセンブリからの引き続く排出のために該ステープル形成凹部と整列した第二の位置へと移動可能であるように、該カートリッジアセンブリ内に支持されている、カートリッジアセンブリ、
を備える、外科手術用ステープラー。
(項目2)
前記第一の複数のステープルは、前記カートリッジアセンブリからの該第一の複数のステープルの排出前に、第一の複数のコンベヤリンク内に収容されており、そして前記第二の複数のステープルは、該カートリッジアセンブリからの該第二の複数のステープルの排出前に、第二の複数のコンベヤリンク内に収容されている、上記項目に記載のステープラー。
(項目3)
前記第一の複数のコンベヤリンクおよび前記第二の複数のコンベヤリンクが、1つのコンベヤ上に支持されており、該コンベヤは、前記第二の複数のステープルを前記第一の位置から前記第二の位置へと回転させるように回転可能である、上記項目のうちのいずれかに記載のステープラー。
(項目4)
前記第一の複数のコンベヤリンクは最初、前記コンベヤの上部組織接触部分を規定し、前記第二の複数のコンベヤリンクは最初、該コンベヤの上部近位部分を規定し、そして第三の複数のコンベヤリンクは最初、該コンベヤの下部遠位部分を規定する、上記項目のうちのいずれかに記載のステープラー。
(項目5)
最初に前記第三の複数のコンベヤリンク内に配置される複数のプッシャーをさらに備え、該複数のプッシャーは、前記第一の複数のステープルを前記カートリッジアセンブリから排出するために、該第三の複数のコンベヤリンク内から前記第一の複数のコンベヤリンク内の位置へと移動可能である、上記項目のうちのいずれかに記載のステープラー。
(項目6)
前記第二の複数のステープルが前記第二の位置へと移動する際に、前記第一の複数のコンベヤリンクは、前記コンベヤの前記下部遠位部分を規定するように位置し、そして前記第二の複数のコンベヤリンクは、該コンベヤの前記上部組織接触部分を規定するように位置する、上記項目のうちのいずれかに記載のステープラー。
(項目7)
前記第二の複数のステープルが前記第二の位置にある際に、前記複数のプッシャーは、前記第二の複数のステープルを前記カートリッジアセンブリから排出するために、前記第一の複数のコンベヤリンク内から前記第二の複数のコンベヤリンク内へと移動可能であるように配置される、上記項目のうちのいずれかに記載のステープラー。
(項目8)
前記カートリッジアセンブリを通って選択的に並進可能な少なくとも1つのカム棒をさらに備え、該少なくとも1つのカム棒は、該少なくとも1つのカム棒が該カートリッジアセンブリを通って並進する際に、前記アンビルアセンブリの前記ステープル形成凹部と整列して位置する前記ステープルを該カートリッジアセンブリから排出するように構成されている、上記項目のうちのいずれかに記載のステープラー。
(項目9)
前記カートリッジアセンブリを通って選択的に並進可能な少なくとも1つの再装填棒をさらに備え、該少なくとも1つの再装填棒は、該少なくとも1つの再装填棒が該カートリッジアセンブリを通って並進する際に、前記第一の位置から前記第二の位置への前記第二の複数のステープルの移動を起こすように構成されている、上記項目のうちのいずれかに記載のステープラー。
(項目10)
発射および再装填アセンブリをさらに備え、該発射および再装填アセンブリは、発射モードと再装填モードとの間で並進可能であり、該発射モードは、前記アンビルアセンブリの前記ステープル形成凹部と整列した位置にある前記ステープルを排出するためのモードであり、そして該再装填モードは、前記第二の複数のステープルを前記第一の位置から前記第二の位置へと回転させるためのモードである、上記項目のうちのいずれかに記載のステープラー。
(項目11)
前記発射および再装填アセンブリは、該発射および再装填アセンブリの完全な前進および後退に応答して、前記発射モードと前記再装填モードとの間で交互に並進する、上記項目のうちのいずれかに記載のステープラー。
(項目12)
アンビルアセンブリ;
カートリッジアセンブリであって、該アンビルアセンブリおよび該カートリッジアセンブリのうちの少なくとも一方は、他方に対して開位置とクランプ位置との間で旋回可能であり、該カートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを収容する、カートリッジアセンブリ;
該第一の複数のステープルを該カートリッジアセンブリから排出するために、該カートリッジアセンブリを通って並進可能である駆動棒;
該カートリッジアセンブリ内の該第二の複数のステープルを該カートリッジアセンブリからの引き続く排出のための位置へと移動させるために、該駆動棒とは独立して該カートリッジアセンブリを通って並進可能である少なくとも1つの再装填棒;ならびに
結合器を備える発射および再装填アセンブリであって、該発射および再装填アセンブリは、発射モードと再装填モードとの間で並進可能であり、該発射および再装填アセンブリが該発射モードにある場合、該結合器は該駆動棒と係合し、そして該発射および再装填アセンブリが該再装填モードにある場合、該結合器は該少なくとも1つの再装填棒と係合する、発射および再装填アセンブリ、
を備える、外科手術用ステープラー。
(項目13)
前記発射モードでの前記結合器の並進は、前記駆動棒を前進させて、前記第一の複数のステープルを前記カートリッジアセンブリから排出する、上記項目のうちのいずれかに記載のステープラー。
(項目14)
前記再装填モードでの前記結合器の並進は、前記少なくとも1つの再装填棒を前進させて、前記カートリッジアセンブリ内の前記第二の複数のステープルを、該カートリッジアセンブリからの引き続く排出のための位置へと移動させる、上記項目のうちのいずれかに記載のステープラー。
(項目15)
前記結合器が前記再装填モードで並進して前記第二の複数のステープルを引き続く排出のための位置へと移動させた後の、前記発射モードでの該結合器の並進は、該第二の複数のステープルを前記カートリッジアセンブリから排出する、上記項目のうちのいずれかに記載のステープラー。
(項目16)
可動ハンドルを備えるハンドルアセンブリをさらに備え、該可動ハンドルは、前記結合器を並進させるために、非圧縮位置から圧縮位置へと移動可能である、上記項目のうちのいずれかに記載のステープラー。
(項目17)
前記発射および再装填アセンブリの前記発射モードにおいて、前記可動ハンドルは、前記第一の複数のステープルを前記カートリッジアセンブリから排出するために、前記非圧縮位置から前記圧縮位置へと移動可能である、上記項目のうちのいずれかに記載のステープラー。
(項目18)
前記発射および再装填アセンブリの前記再装填モードにおいて、前記可動ハンドルは、前記カートリッジアセンブリ内の前記第二の複数のステープルを該カートリッジアセンブリからの引き続く排出のための位置へと移動させるために、前記非圧縮位置から前記圧縮位置へと移動可能である、上記項目のうちのいずれかに記載のステープラー。
(項目19)
前記可動ハンドルの、前記非圧縮位置から前記圧縮位置へ、そして該非圧縮位置へと戻る動きは、前記発射および再装填アセンブリを前記発射モードと前記再装填モードとの間で並進させる、上記項目のうちのいずれかに記載のステープラー。
(項目20)
前記発射および再装填アセンブリは、ロックリングをさらに備え、該ロックリングは、該発射および再装填アセンブリが前記発射モードにある場合に、前記少なくとも1つの再装填棒の並進を妨げ、そして該発射および再装填アセンブリが前記再装填モードにある場合に、前記駆動棒の並進を妨げるように構成されている、上記項目のうちのいずれかに記載のステープラー。
【0008】
(摘要)
外科手術用ステープラーは、アンビルアセンブリおよびカートリッジアセンブリを備える。このアンビルアセンブリは、ステープル形成凹部を規定する。このアンビルアセンブリおよびこのカートリッジアセンブリのうちの一方または両方は、開位置とクランプ位置との間で、互いに対して旋回可能である。このカートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを備える。この第一の複数のステープルは最初、このカートリッジアセンブリからの排出のために、このアンビルアセンブリのステープル形成凹部と整列した位置にある。この第二の複数のステープルは、このアンビルアセンブリのステープル形成凹部と整列しない第一の位置から、このカートリッジアセンブリからの引き続く排出のためにこれらのステープル形成凹部と整列した第二の位置へと移動可能であるように、このカートリッジアセンブリ内に支持されている。
【0009】
(要旨)
本開示の1つの実施形態によれば、外科手術用ステープラーが提供される。この外科手術用ステープラーは、ステープル形成凹部を規定するアンビルアセンブリ、およびカートリッジアセンブリを備える。このアンビルアセンブリおよび/またはこのカートリッジアセンブリは、開位置とクランプ位置との間で、互いに対して旋回可能である。このカートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを備える。この第一の複数のステープルは最初、このカートリッジアセンブリからの排出のために、このアンビルアセンブリのステープル形成凹部と整列した位置にある。この第二の複数のステープルは、このアンビルアセンブリのステープル形成凹部と整列しない第一の位置から、このカートリッジアセンブリからの引き続く排出のためにこれらのステープル形成凹部と整列した第二の位置へと移動可能であるように、カートリッジアセンブリ内に支持される。
【0010】
ある実施形態において、この第一の複数のステープルは、このカートリッジアセンブリからの第一の複数のステープルの排出前に、第一の複数のコンベヤリンクに収容され、そしてこの第二の複数のステープルは、このカートリッジアセンブリからの第二の複数のステープルの排出前に、第二の複数のコンベヤリンクに収容される。
【0011】
この第一の複数のコンベヤリンクおよびこの第二の複数のコンベヤリンクは、コンベヤに支持され得る。このような実施形態において、このコンベヤは、第二の複数のステープルを第一の位置から第二の位置へと回転させるために、回転可能である。
【0012】
ある実施形態において、この第一の複数のコンベヤリンクは最初、このコンベヤの上部組織接触部分を規定し、この第二の複数のコンベヤリンクは最初、このコンベヤの上部近位部分を規定し、そして第三の複数のコンベヤリンクは最初、このコンベヤの下部遠位部分を規定する。さらに、複数のプッシャーが最初、この第三の複数のコンベヤリンク内に配置され得る。このような実施形態において、これらのプッシャーは、第一の複数のステープルをカートリッジアセンブリから排出するために、第三の複数のコンベヤリンクから、第一の複数のコンベヤリン内の位置へと移動可能である。第二の複数のステープルが第二の位置まで移動する場合、第一の複数のコンベヤリンクは、このコンベヤの下部遠位部分を規定するように配置され得、そして第二の複数のコンベヤリンクは、このコンベヤの上部組織接触部分を規定するように配置され得る。従って、第二の複数のステープルが第二の位置へと移動する場合、複数のプッシャーは、第二の複数のステープルをカートリッジアセンブリから排出するために、第一の複数のコンベヤリンク内から第二の複数のコンベヤリンク内へと移動可能であるように、配置され得る。
【0013】
1つの実施形態において、1つ以上のカム棒が、このカートリッジアセンブリを通って選択的に並進可能である。このカム棒(単数または複数)は、そのカム棒がカートリッジアセンブリを通って並進する際に、アンビルアセンブリのステープル形成凹部と整列して位置するステープルをカートリッジアセンブリから排出するように構成される。
【0014】
別の実施形態において、1つ以上の再装填棒が、このカートリッジアセンブリを通って選択的に並進可能である。この再装填棒(単数または複数)は、その再装填棒がカートリッジアセンブリを通って並進する際に、第二の複数のステープルの第一の位置から第二の位置への移動を起こすように構成される。
【0015】
発射および再装填アセンブリもまた提供され得る。この発射および再装填アセンブリは、発射モード(アンビルアセンブリのステープル形成凹部と整列して位置するステープルを排出するためのモード)と再装填モード(第二の複数のステープルを第一の位置から第二の位置へと回転させるためのモード)との間で並進可能である。さらに、この発射および再装填アセンブリは、この発射および再装填アセンブリの完全な前進および後退に応答して、発射モードと再装填モードとの間で交互に並進し得る。
【0016】
本開示に従って提供される外科手術用ステープラーの別の実施形態は、アンビルアセンブリ、カートリッジアセンブリ、駆動棒、1つ以上の再装填棒、ならびに発射および再装填アセンブリを備える。このアンビルアセンブリおよび/またはこのカートリッジアセンブリは、開位置とクランプ位置との間で互いに対して旋回可能である。このカートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを備える。この駆動棒は、第一の複数のステープルをカートリッジアセンブリから排出するために、このカートリッジアセンブリを通って並進可能である。この再装填棒(単数または複数)は、カートリッジアセンブリ内の第二の複数のステープルを、このカートリッジアセンブリからの引き続く排出のための位置へと移動させるために、このカートリッジアセンブリを通って並進可能である。この発射および再装填アセンブリは、結合器を備え、そして発射モードと再装填モードとの間で並進可能である。この発射および再装填アセンブリが発射モードにある場合、この結合器は駆動棒に係合し、そしてこの発射および再装填アセンブリが再装填モードにある場合、この結合器は再装填棒に係合する。
【0017】
ある実施形態において、この結合器は、発射モードでのこの結合器の並進が駆動棒を前進させて第一の複数のステープルをカートリッジアセンブリから排出するように、および/または再装填モードでのこの結合器の並進が再装填棒を前進させて、カートリッジアセンブリ内の第二の複数のステープルを、このカートリッジアセンブリからの引き続く排出のための位置へと移動させるように、構成される。この結合器が再装填モードにおいて並進して、第二の複数のステープルを引き続く排出のための位置へと移動させた後の、発射モードでのこの結合器の並進は、第二の複数のステープルをカートリッジアセンブリから排出するように作動可能であり得る。
【0018】
1つの実施形態において、可動ハンドルを備えるハンドルアセンブリが提供される。この可動ハンドルは、結合器を並進させるために、非圧縮位置から圧縮位置へと移動可能である。発射および再装填アセンブリの発射モードにおいて、この可動ハンドルは、第一の複数のステープルをカートリッジアセンブリから排出するために、非圧縮位置から圧縮位置へと移動可能である。発射および再装填アセンブリの再装填モードにおいて、この可動ハンドルは、カートリッジアセンブリ内の第二の複数のステープルを、このカートリッジアセンブリからの引き続く排出のための位置に移動させるために、非圧縮位置から圧縮位置へと移動可能である。さらに、非圧縮位置から圧縮位置へ、そして非圧縮位置へと戻る、可動ハンドルの動きは、発射および再装填アセンブリを発射モードと再装填モードとの間で並進させるように作動可能であり得る。
【0019】
1つの実施形態において、この発射および再装填アセンブリは、ロックリングをさらに備える。このロックリングは、この発射および再装填アセンブリが発射モードにある場合に、再装填棒の並進を妨げ、そしてこの発射および再装填アセンブリが再装填モードにある場合に、駆動棒の並進を妨げるように、構成される。
【0020】
本発明の種々の実施形態が、図面を参照しながら本明細書中に記載される。
【図面の簡単な説明】
【0021】
【図1】図1は、本開示の外科手術用ステープル留め装置の1つの好ましい実施形態の正面斜視図である。
【図2】図2は、SULUがその細長本体から取り外されている、外科手術用ステープル留め装置の背面斜視図である。
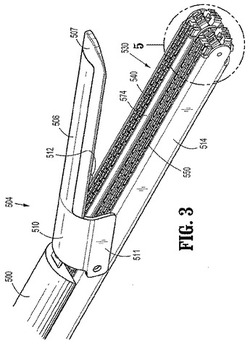
【図3】図3は、開位置で示される、SULUの遠位端の正面斜視図である。
【図4】図4は、クランプ位置で示される、SULUの遠位端の正面斜視図である。
【図5】図5は、図3に示される細部領域の拡大図である。
【図6】図6は、図4の切断線6−6に沿って見た横断面図である。
【図7】図7は、部品を分離したSULUの正面斜視図である。
【図8】図8は、図7に示される細部領域の拡大図である。
【図9】図9は、SULUの発射および再装填アセンブリのロックリングの斜視図である。
【図10】図10は、部品を分離して示されるSULUの駆動アセンブリの正面斜視図である。
【図11】図11は、図7に示される細部領域の拡大図である。
【図12】図12は、図7に示される細部領域の拡大図である。
【図13】図13は、SULUの隣接するコンベヤリンクの背面斜視図である。
【図14】図14は、SULUのプッシャーのうちの1つの背面斜視図である。
【図14A】図14Aは、図14のプッシャーの正面斜視図である。
【図15】図15は、図14の切断線15−15に沿って見た断面図である。
【図16】図16は、SULUのコンベヤアセンブリおよび駆動アセンブリの背面斜視図である。
【図17】図17は、図12に示される細部領域の拡大図である。
【図18】図18は、図12に示される細部領域の拡大図である。
【図18A】図18Aは、図12に示される細部領域の拡大図である。
【図19】図19は、SULUのコンベヤアセンブリの平面図である。
【図20】図20は、図19の切断線20−20に沿って見た断面図である。
【図21】図21は、図19の切断線21−21を横切って見た断面図である。
【図22】図22は、図2の切断線22−22に沿って見た断面図である。
【図23】図23は、図22に示される細部領域の拡大図である。
【図24】図24は、駆動アセンブリの前進中で示されているSULUの長手軸方向断面図である。
【図25】図25は、図24に示される細部領域の拡大図である。
【図26】図26は、SULUの発射および再装填アセンブリの背面斜視図である。
【図27】図27は、発射および再装填アセンブリの近位端の拡大斜視図である。
【図28】図28は、発射および再装填アセンブリの平面図である。
【図29】図29は、図28に示される細部領域の拡大図である。
【図30】図30は、図27の切断線30−30に沿って見た断面図である。
【図31】図31は、図26の切断線31−31に沿って見た断面図である。
【図32】図32は、発射および再装填アセンブリの背面斜視図である。
【図33】図33は、ハウジングの一部分が除かれて内部構成要素を示しており、可動ハンドルが元の位置にある、ステープラーのハンドルアセンブリの斜視図である。
【図34】図34は、ステープラーのシャフトアセンブリの正面斜視図である。
【図35】図35は、シャフトアセンブリの背面斜視図である。
【図36】図36は、部品を分離して示される、ステープラーのハンドルアセンブリの斜視図である。
【図37】図37は、シャフトアセンブリのSULU解放リンクの斜視図である。
【図38】図38は、図37に示される細部領域の拡大図である。
【図39】図39は、ハンドルアセンブリの歯付きラックの斜視図である。
【図40】図40は、図39の切断線40−40に沿って見た断面図である。
【図41】図41は、部品を分離して示される、ステープラーの細長本体部分の正面斜視図である。
【図42】図42は、シャフトアセンブリの関節運動アセンブリの拡大斜視図である。
【図43】図43は、関節運動アセンブリのクラッチの側面図である。
【図44】図44は、関節運動アセンブリの上クラッチの底面斜視図である。
【図45】図45は、元の位置で示され、SULUが存在しない、ステープラーの長手軸方向断面図である。
【図46】図46は、図45に示される細部領域の拡大図である。
【図47】図47は、図45に示される細部領域の拡大図である。
【図48】図48は、図45に示される細部領域の拡大図である。
【図49】図49は、SULUが存在しないステープラーの正面斜視図である。
【図50】図50は、ステープラーの細長本体の近位端の長手軸方向断面図である。
【図51】図51は、SULUの近位端およびステープラーの細長本体の側面図であり、このSULUおよびこの細長本体は、互いから脱係合している。
【図52】図52は、脱係合位置で示される、細長本体の遠位端の正面斜視図である。
【図53】図53は、係合位置で示される、細長本体の遠位端の正面斜視図である。
【図54】図54は、係合位置で示される、細長本体の遠位端の長手軸方向断面図である。
【図55】図55は、細長本体に挿入されたSULUの近位端の側面図である。
【図56】図56は、細長本体内で係合するように回転するのが示されている、SULUの近位端の側面図である。
【図57】図57は、細長本体内に係合したSULUの近位端の側面図である。
【図58】図58は、部品を分離して示される、ハンドルアセンブリのアクチュエータアセンブリの側面図である。
【図59】図59は、把持具モードにあるアクチュエータアセンブリを図示する、ハンドルアセンブリの一部分の横断面図である。
【図60】図60は、可動ハンドルが圧縮位置にあり、把持具モードにある、ハンドルアセンブリの長手軸方向断面図である。
【図61】図61は、図60に示される細部領域の拡大図である。
【図62】図62は、把持具モードで元の位置に戻る可動ハンドルを図示する長手軸方向断面図である。
【図63】図63は、部分的に発射した位置で示されている、発射および再装填アセンブリの正面斜視図である。
【図64】図64は、第一の位置で示されている、発射および再装填アセンブリのロックリングの横断面図である。
【図65】図65は、部分的に発射した位置で示されている、SULUの長手軸方向断面図である。
【図66】図66は、図65に示される細部領域の拡大図である。
【図67】図67は、発射モードに並進しているアクチュエータアセンブリを図示する、ハンドルアセンブリの斜視図である。
【図68】図68は、可動ハンドルが圧縮位置にあり、そしてアクチュエータアセンブリが発射モードに並進しているのを示す、アクチュエータアセンブリの長手軸方向断面図である。
【図69】図69は、把持具モードから発射モードへと移動するアクチュエータアセンブリを図示する、ハンドルアセンブリの一部分の横断面図である。
【図70】図70は、図68の切断線70−70に沿って見た断面図である。
【図71】図71は、可動ハンドルが圧縮位置にある、発射モードにある起動アセンブリの長手軸方向断面図である。
【図72】図72は、可動ハンドルが圧縮位置から解放された、発射モードにある起動アセンブリの長手軸方向断面図である。
【図73】図73は、可動ハンドルが元の位置に戻っている、発射モードにある起動アセンブリの長手軸方向断面図である。
【図74】図74は、可動ハンドルが圧縮位置にあり、そして歯付きラックが遠位に並進している、発射モードにある起動アセンブリの長手軸方向断面図である。
【図75】図75は、第一のセットのステープルを発射した後のSULUの長手軸方向断面図である。
【図76】図76は、図75に示される細部領域の拡大図である。
【図77】図77は、発射モードで示されている、SULUの発射および再装填アセンブリの平面図である。
【図78】図78は、図77に示される細部領域の拡大図である。
【図79】図79は、発射モードから再装填モードへと並進しているSULUの発射および再装填アセンブリの一部分の拡大図である。
【図80】図80は、図79の切断線80−80に沿って見た断面図である。
【図81】図81は、歯付きラックが近位に後退しているのを示す、ハンドルアセンブリの長手軸方向断面図である。
【図82】図82は、発射モードからさらに再装填モードへと並進している、発射および再装填アセンブリの平面図である。
【図83】図83は、図82に示される細部領域の拡大図である。
【図84】図84は、再装填モードで示されている、発射および再装填アセンブリの一部分の拡大図である。
【図85】図85は、図84の切断線85−85に沿って見た断面図である。
【図86】図86は、第二の位置で示されている、発射および再装填アセンブリのロックリングの横断面図である。
【図87】図87は、SULUの再装填中の、コンベヤアセンブリの一部分および発射および再装填アセンブリの一部分の上面斜視図である。
【図88】図88は、SULUの再装填中の、コンベヤアセンブリの一部分および発射および再装填アセンブリの一部分の長手軸方向断面図である。
【図89】図89は、コンベヤアセンブリが回転してSULUを再装填しているのを示す概略図である。
【図90】図90は、再装填モードから発射モードへと部分的に回転したところが示されている、発射および再装填アセンブリの横断面図である。
【図91】図91は、発射モードで示されている、発射および再装填アセンブリの横断面図である。
【発明を実施するための形態】
【0022】
(詳細な説明)
本開示の実施形態が、ここで図面を参照しながら詳細に記載される。図面において、同じ参照番号は、類似の要素または同一の要素を見分ける役に立つ。本明細書中で使用される場合、用語「遠位」とは、記載されている装置の、使用者から遠い方の部分をいい、一方で、用語「近位」とは、記載されている装置の、使用者に近い方の部分をいう。
【0023】
ここで図1〜図2を参照すると、本開示に従って提供される内視鏡外科手術用ステープラーが、一般に参照番号10により識別されて示されている。ステープラー10は一般に、ハンドルアセンブリ12、回転ノブ14、関節運動レバー16、およびSULU 500に係合するように構成された細長本体部分18を備える。これらの構成要素の各々が、以下に詳細に記載される。ステープラー10の1つの実施形態が図示され、本明細書中に記載されるが、SULU 500は、他の任意の適切な外科手術用ステープル留め装置と一緒に使用するために構成され得ることが想定される。
【0024】
図2〜図32を参照しながら、SULU 500を説明する。最初に図2〜図4を参照すると、SULU 500は一般に、近位本体部分502およびツールアセンブリ504を備える。近位本体部分502は、以下に記載されるように、ステープラー10の細長本体部分18の遠位端に取り外し可能に取り付け可能であり、そしてツールアセンブリ504は、近位本体部分502の遠位端から延びる。ツールアセンブリ504は、アンビルアセンブリ506およびカートリッジアセンブリ514を備える。アンビルアセンブリ506は、以下でより詳細に議論されるように、カートリッジアセンブリ514に対して、開位置または非クランプ位置(図3)から、閉位置またはクランプ位置(図4)へと旋回する。
【0025】
図3〜図7を参照すると、アンビルアセンブリ506は、アンビルプレート508を支持するアンビルカバー507を備える。アンビルプレート508は、複数のステープル形成凹部513を備え得、これらのステープル形成凹部は、ツールアセンブリ504がクランプ位置(図1)にある場合に、ステープル形成凹部513が、カートリッジアセンブリ514に形成されたステープルスロット568(図13)に並置して整列して位置するように構成される。従って、各ステープル「S」(図20〜図21)がカートリッジアセンブリ514のステープルスロット568(図13)のうちの1つから排出されると、各ステープル「S」(図20〜図21)は、アンビルアセンブリ506とカートリッジアセンブリ514との間に把持された組織を通って前進し、そしてステープル形成凹部513のうちの1つに入り、その結果、ステープル「S」(図20〜図21)が組織の周りで形成される。アンビルプレート508は、アンビルカバー507の下側に固定されて、プレート508とカバー507との間にチャネル509を規定する(図6)。チャネル509は、以下に記載されるように、ほぼ「T」字型の構成を規定し、これは、動的クランプ留め部材593の上梁593aをこのチャネルに通して受容し、そして案内するように適合される。アンビルカバー507は、間隔を空けた一対のフランジ511、512を有する近位部分510を備え、これらのフランジは、カートリッジアセンブリ514の両側でカートリッジアセンブリ514に対して旋回可能に結合され、従って、アンビルアセンブリ506がカートリッジアセンブリ514に対して開位置(図3)とクランプ位置(図4)との間で旋回することを可能にする。あるいは、カートリッジアセンブリ514がアンビルアセンブリ506に対して旋回可能に設置されてもよい。
【0026】
図6〜図7および図12〜図21を参照すると、カートリッジアセンブリ514は枠部材516を備え、この枠部材は、コンベヤアセンブリ530、駆動アセンブリ590、ならびに発射および再装填アセンブリ600を回転可能に支持する。枠部材516は、ほぼU字型の構成を規定し、基部517および間隔を空けた1対の側壁518を有し、これらの側壁の間に細長チャネル519を規定する。細長チャネル519は、コンベヤアセンブリ530を受容するように構成される。より具体的には、枠部材516は、側壁518を通ってその近位端521に規定される1対の対向する近位開口部分522(コンベヤアセンブリ530の近位端を回転可能に支持するように構成される)、および側壁518を通ってその遠位端523に規定される1対の遠位開口部分524(コンベヤアセンブリ530の遠位端を回転可能に支持するように構成される)を備える。
【0027】
コンベヤアセンブリ530は一般に、中心支持部材531、ならびに中心支持部材531の各側に配置された第一のコンベヤ540および第二のコンベヤ550を備える。中心支持部材531は、この中心支持部材を通る細長チャネル532(図6)を規定し、この細長チャネルは、アンビルアセンブリ506とカートリッジアセンブリ514との間に把持された組織を切断するために、動的クランプ留め部材593を受容してその並進を案内するように構成される。中心支持部材531は、外向きにフランジの付いた下部分535をさらに備え、これは、図6に最もよく示されるように、枠部材516の基部517に規定されたスロットを通って延びて、中心支持部材531と枠部材516とを互いに固定する。コンベヤ540、550の各々は、1対のコンベヤ鎖541、551を備え、これらのコンベヤ鎖は、ループした構成を規定する(図12)。より具体的には、各コンベヤ540、550の対のコンベヤ鎖541、551は、それぞれ、その近位端で近位スプロケット542、552の周りに、そしてその遠位端で遠位スプロケット544、554の周りに配置される。近位スプロケット542、552は、枠部材516の側壁518に規定された対向する近位開口部分522内に回転可能に支持される。他方で、遠位スプロケット544、554は、枠部材516の側壁518に規定された対向する遠位開口部分524内、および中心支持部材531の遠位ディスク533に規定された開口部分534内に、回転可能に支持される。コンベヤアセンブリ530の第一のコンベヤ540および第二のコンベヤ550は、互いに実質的に類似であるので、不必要な冗長性を回避するために、第一のコンベヤ540のみが以下で説明される。
【0028】
図6〜図7および図12〜図21の参照を続けると、コンベヤ540のコンベヤ鎖541は、互いに協働して、複数のコンベヤリンク566を、コンベヤ鎖541のかなりの部分に沿って支持する。コンベヤリンク566は、図13に最もよく示されるように、互いに相補的に形成され、その結果、隣接するコンベヤリンク566が互いに嵌合して、コンベヤ540の上部組織接触表面570をその上部分で形成し、そしてコンベヤ540の下部分572で形成する(図18、図18Aおよび図19を参照のこと)。同様に、コンベヤリンク566は互いに嵌合して、第二のコンベヤ550の上部組織接触表面556をその上部分で形成する。第一のコンベヤ540および第二のコンベヤ550のそれぞれの上部組織接触表面570、556は、チャネル574の両側に配置され(図3を参照のこと)、そして一緒になって、カートリッジアセンブリ514の上部組織接触表面を形成する。コンベヤリンク566もまた協働して、コンベヤ540、550のそれぞれの上部組織接触表面570、556に沿って長手軸方向に延びる、ステープルスロット568の3つの直線状の列(3列より多いかまたは少ないステープルスロットも想定される)を形成する。ステープル「S」は、ステープルスロット568の各々に収容される。さらに、各ステープルスロット568は、プッシャー580の一部分を受容して、ステープル「S」をカートリッジアセンブリ514から発射するように、すなわち、排出するように構成される。より具体的には、プッシャー580は、図14、図14A、図16および図19〜図21に示されるように、各々が、ステープル「S」(直線状の列の各々からの1つ)のバックスパンに各々が係合する3つのブロック582を規定し、その結果、起動の際に、カム棒595のカム楔596がプッシャー580を上方に、ステープルスロット568内へと推進し、これは次に、ステープル「S」を下方に推進して、ステープル「S」をカートリッジアセンブリ514から排出する。ステープル「S」、プッシャー580、およびカム棒595は、以下に詳細に記載される。
【0029】
1セットのコンベヤリンク566は、図13、図18、図18Aおよび図19に最もよく示されるように、そして上記のように、互いに嵌合して、コンベヤ540の上部組織接触表面570(および同様に、コンベヤ550の上部組織接触表面556)を形成し、一方で、コンベヤリンク566の残りは、コンベヤ鎖541に沿った他の位置(例えば、上部組織接触表面570の近く、下部分572、近位スプロケット542の周囲、遠位スプロケット544の周囲など)に配置される。コンベヤリンク566は、枠部材516に沿って、そして近位スプロケット542および遠位スプロケット544の周りで、回転可能である。より具体的には、コンベヤリンク566は、コンベヤ540のコンベヤ鎖541により形成されるループに沿って、コンベヤ540の上部分(ここで、コンベヤリンク566が上部組織接触表面570を規定している)の位置から、遠位スプロケット544の周りで反時計回りに、下部分572に沿って近位に、近位スプロケット542の周りで反時計回りに、上部組織接触表面570から遠位に、などで回転する。以下により詳細に記載されるように、このような構成は、先のセットのコンベヤリンク566のステープル「S」が一旦発射されると、新たなセットのコンベヤリンク566(上部組織接触表面570の近くに位置するコンベヤリンク566)がアンビルプレート508(図6)のステープル形成凹部513(図6)と並置して整列する位置まで移動して、コンベヤ540の上部組織接触表面570を規定することを可能にする。新たなコンベヤリンク566が適切にある状態で、ステープラー10は、第二のセットのステープル「S」をカートリッジアセンブリ514から排出するために発射され得る。換言すれば、複数のセットのステープル「S」が、各発射操作のために新たなSULUを必要とせずに、SULU 500から発射され得る。複数セットのステープル「S」を発射する際のSULU 500の作動は、本明細書中以下により詳細に記載される。
【0030】
図14、図14A、図15、図19、図20、図21および図25をさらに参照すると、各プッシャー580は、上記のように、カートリッジアセンブリ514からのステープル「S」の排出を容易にするために、発射中に、ステープル「S」のうちの1つ(各直線状の列の各々から1つ)のバックスパンに各々が係合する、3つのブロック582(より多いかまたはより少ないブロックも想定される)を規定する。プッシャー580は、コンベヤリンク566(コンベヤ540の上部組織接触表面570を形成する)とコンベヤリンク566(上部組織接触表面570の真下でコンベヤ540の下部分572に配置される)との間に配置され、そして二方向プッシャー580として構成される。最初、図25に示されるように、プッシャー580は、コンベヤ540の下部分572のコンベヤリンク566に規定されたスロット568内に配置され、その結果、起動の際に、カム棒595のカム楔596がプッシャー580の角度の付いた表面584に接触して、プッシャー580を上方に、下部分572のコンベヤリンク566のスロット568から、コンベヤ540の上部組織接触表面570を形成するコンベヤリンク566に規定されたスロット568内へと推進して、これらのスロット568からステープル「S」を排出する。プッシャー580は、図15に示されるように、その第一の端部585に溝586を規定し、これらの溝586は、ステープル「S」のバックスパンを受容して、コンベヤリンク566からのステープル「S」の排出を案内するように構成される。
【0031】
図89もまた参照して、一旦、以下に記載されるように、最初のセットのステープル「S」が排出されると、コンベヤ540が回転し、その結果、コンベヤリンク566(先に発射されたステープルを収容していたが、今はそのスロット568内に配置されたプッシャー580を収容している)が遠位スプロケット544の周りでコンベヤ540の下部分572へと回転し、この間に、新たなセットのコンベヤリンク566(未発射のステープル「S」を収容する)がコンベヤ540に沿って遠位に並進して、上部組織接触表面570、またはコンベヤ540の表面570の一部分を形成する。この位置で、プッシャー580がコンベヤ540の下部分572のコンベヤリンク566内に配置される場合、プッシャー580は、上下逆に配向する(遠位スプロケット544の周りでのコンベヤリンク566の回転に起因する)。従って、プッシャー580はまた、その第二の端部587に溝588を規定し、これらの溝は、ステープル「S」のバックスパンを受容して、ステープル「S」の排出を案内するように構成される。プッシャー580はまた、角度の付いた表面589を備え、これらの表面は、この上下逆の配向にある場合に、カム棒595のカム楔596に沿ってカム作用するように構成される。すなわち、プッシャー580は、プッシャー580の配向とは無関係に、コンベヤリンク566からステープル「S」を排出するように作動可能である。
【0032】
ここで図6、図7、図10、図11、図12および図16を参照すると、駆動アセンブリ590は、二叉の近位端592、および動的クランプ留め部材593に係合する遠位端594を有する、駆動棒591を備える。駆動アセンブリ590は、その両側で駆動棒591に結合された、1対のカム棒595をさらに備える。カム棒595はそれぞれ、カム楔596を規定する角度の付いた遠位端表面を備え、このカム楔596は、駆動棒591の遠位への並進の際に、プッシャー580の、相補的な形状の角度の付いた表面584、589に(プッシャー580の配向に依存して)スライド可能に接触して(図14〜図15を参照のこと)、プッシャー580を上方に推進して、ステープル「S」をコンベヤリンク566のスロット568から排出するように構成される。タブ597(図10)が、カム棒595の各々に規定されたスロット598を通し、駆動棒591に規定されたスロット599を通して受容されて、カム棒595および駆動棒591を、互いに対して間隔を空けて固定する。
【0033】
動的クランプ留め部材593は、上記のように、そして図6〜図7および図10〜図11に最もよく示されるように、駆動棒591の遠位端594に配置される。動的クランプ留め部材593は、直立部材593cにより相互接続された、上梁593aおよび下梁593bを備える。直立部材593cは、切断刃593dを規定して、組織を通しての動的クランプ留め部材593の前進を容易にする。以下により詳細に記載されるような、駆動アセンブリ590の最初の起動の際に、動的クランプ留め部材593の上梁593aは、アンビルアセンブリ506のプレート508とカバー507との間に規定されたT字型チャネル509の上の横向き部分内に前進し、遠位梁593bは、枠部材516および中心支持部材531の外側に沿って並進し、そして直立部材593cは、アンビルアセンブリ506のT字型チャネル509の直立部分および中心支持部材531の細長チャネル532内へと並進して(T字型チャネル509の直立部分および中心支持部材531の細長チャネル532は、互いに協働して、チャネル574(図3)を規定する)、アンビルアセンブリ506をカートリッジアセンブリ514に対して、クランプ位置(図4)まで旋回させる。しかし、この最初の起動、すなわち、クランプ留め行程は、カム棒595を並進させてプッシャー580と接触させることなく、アンビルアセンブリ506をカートリッジアセンブリ514に対してクランプ位置(図4)まで旋回させるために充分な距離のみ、動的クランプ留め部材593を前進させる。従って、最初の起動の際に、カム棒595はプッシャー580の近位に残り、従って、ステープル「S」の発射も組織の切断も行われない。
【0034】
ハンドルアセンブリ12の引き続く起動(すなわち、発射行程)の際に(ハンドルアセンブリ12は発射モードに配置されている)、以下により詳細に記載されるように、動的クランプ留め部材593は、SULU 500を通って次第にさらに前進し、その結果、カム棒595が推進されてプッシャー580と接触して、ステープル「S」を発射させ、そして動的クランプ留め部材593が組織を通って前進して、カートリッジアセンブリ514のコンベヤ540と550との間の組織を切断する。
【0035】
図7〜図10、および図25〜図32を参照すると、発射および再装填アセンブリ600は一般に、横方向に対向する1対の再装填棒660、670、非回転ドライバ610、回転結合器620、近位カム630、遠位カム640、およびロックリング650を備える。発射および再装填アセンブリ600は、以下を見ると明らかになるように、発射モード(このモードにおいて、ステープル「S」をカートリッジアセンブリ514から排出するため、およびアンビルアセンブリ506とカートリッジアセンブリ514との間に把持された組織を切断するために、駆動棒591が選択的に前進可能である)と再装填モード(このモードにおいて、コンベヤリンク566を推進してコンベヤ540、550の周りで回転させるために、再装填棒660、670が遠位に前進可能であり、その結果、新たなセットのコンベヤリンク566が、カートリッジアセンブリ514のコンベヤ540、550のそれぞれの上部組織接触表面570、556を形成するように位置し、一方で、発射されたステープルを収容していたコンベヤリンク566は、遠位スプロケット544、554の周りでカートリッジアセンブリ514の下部分へと回転する)との間で交互に並進するように構成される。この構成に起因して、理解され得るように、そして以下により詳細に記載されるように、各完全な発射操作の後に、引き続く発射のためにSULU 500を再装填する、再装填操作が行われる。
【0036】
駆動棒591の近位端592は、上記のように、二叉の構成を規定する。より具体的には、駆動棒591の近位端592は、上アーム681および下アーム682を備え、これらのアームは、互いから間隔を空けており、そして駆動棒591から近位に延びて、駆動棒591の近位端592を形成する。上アーム681および下アーム682の各々は、それらの自由端685、686において、対向する切り抜き部683、684をそれぞれ規定する。対向する切り抜き部683、684は、発射および再装填アセンブリ600が発射モードで配置される場合に、回転結合器620のブロック突出部622を受容し、その結果、回転結合器620の前進は、駆動棒591の類似の前進を起こす。再装填モードにおいて、切り抜き部683、684は、回転結合器620のブロック突出部622に対してずれており、その結果、回転結合器620はもはや、駆動棒591の上アーム681および下アーム682に結合されず、従って、回転結合器620の並進は、駆動棒591の対応する並進を起こさない。さらに、上アーム681および下アーム682は、発射および再装填アセンブリ600の非回転ドライバ610に規定された、垂直方向に対向するスロット612、613内にそれぞれスライド可能に支持されて(図26〜図27を参照のこと)、発射および再装填アセンブリ600が発射モードで作動する場合に、駆動棒591の並進を案内する。
【0037】
図7〜図10、および図25〜図32を引き続き参照すると、横方向に対向する再装填棒660、670は、駆動棒691のアーム681、682と同様に、各々が、切り抜き部664、674をそれぞれ規定する近位端662、672を備える。横方向に対向する再装填棒660、670は、駆動棒591の上アーム681および下アーム682に対して90°ずれており、そして非回転ドライバ610に規定された横方向に対向するスロット614、615内にそれぞれスライド可能に支持されて、発射および再装填アセンブリ600が再装填モードで作動している場合に、再装填棒660、670の並進を案内する。さらに、再装填棒660、670の対向する切り抜き部664、674は、発射および再装填アセンブリ600が再装填モードで作動している場合に、回転結合器620のブロック突出部622を受容するように構成されており、その結果、回転結合器620の並進は、再装填棒660、670の類似の前進を起こす。発射モードにおいて、切り抜き部664、674は、回転結合器620のブロック突出部622に対してずれており、その結果、回転結合器620はもはや再装填棒660、670に結合せず、従って、回転結合器620の並進は、再装填棒660、670の対応する並進を起こさない。
【0038】
回転結合器620は、非回転ドライバ610の近位延長部616の周りに回転可能に配置され、そして上記のように、発射モードにおいては駆動棒591のアーム681、682に係合し、そして再装填モードにおいては再装填棒660、670に係合する。より具体的には、回転結合器620の本体部分624は、その外周に配置された間隔を空けた複数のブロック突出部622を備える。ブロック突出部622は、互いから間隔を空けて、その間にギャップ626を規定する。以下に記載されるように、回転結合器620は、非回転ドライバ610の近位延長部616の周りで、駆動棒591および再装填棒660、670に対して回転可能であり、発射および再装填アセンブリ600を発射モードと再装填モードとの間で並進させる。より具体的には、発射モードにおいて、回転結合器620は、駆動棒591のアーム681、682の対向する切り抜き部683、684がブロック突出部622を受容し、同時に再装填棒660、670がギャップ626内に配置されるように、配向される。他方で、再装填モードにおいては、回転結合器620は、再装填棒660、670の対向する切り抜き部664、674がブロック突出部622を受容し、同時に駆動棒591のアーム681、682がギャップ626内に配置されるように、回転される。
【0039】
回転結合器620は、歯付き近位部分627および歯付き遠位部分629をさらに備える。歯付き近位部分627は、複数の歯を備え、各歯が一般に、直角三角形の構成を規定する。換言すれば、各歯は、長手軸方向表面および角度の付いた表面を規定する。これらの歯は、互いに対して同様に配向されて、歯付き近位部分627の外周で連続的な歯付き構成を規定する。歯付き遠位部分629もまた、複数の歯を備え、各歯が一般に、直角三角形の構成を規定し、そして互いに対して同様に配向される。あるいは、異なる歯の構成が想定される。
【0040】
図7〜図10、および図25〜図32をさらに参照すると、近位カム630および遠位カム640は、発射および再装填アセンブリ600のそれぞれ近位端および遠位端において、静止して配置される。近位カム630は、複数の歯を備える歯付き遠位部分632を備え、これらの歯は、回転結合器620の歯付き近位部分627の歯と相補的な形状にされる。近位カム630の歯は最初、回転結合器620の歯付き近位部分627の歯と整列する。近位カム630は、付勢部材634によって遠位に付勢される。他方で遠位カム640は、複数の歯を備える歯付き近位部分642を備え、これらの歯は、回転結合器620の歯付き遠位部分629の歯と相補的な形状にされる。最初、遠位カム640の歯は、回転結合器620の歯付き遠位部分629の歯に対してずれている。
【0041】
発射および再装填アセンブリ600の完全な前進および後退の際に、近位カム630および遠位カム640は協働して、回転結合器620を回転させ、その結果、発射および再装填アセンブリ600は、発射および再装填アセンブリ600の完全な前進および後退の各々の後に、発射モードと再装填モードとの間を並進する。より具体的には、発射および再装填アセンブリ600の完全な前進の際に、回転結合器620が遠位に推進され、その結果、回転結合器620の歯付き遠位部分629が最終的に、遠位カム640の歯付き近位部分642に接触する。遠位カム640の歯および回転結合器620の歯付き遠位部分629の歯の角度の付いた構成に起因して、回転結合器620の歯付き遠位部分629が推進されて遠位カム640の歯付き近位部分642と接触すると、回転結合器620は遠位カム640に対して回転し、その結果、それぞれの歯が互いに対して相補的にずれ、従って、回転結合器620と遠位カム640とが互いに嵌合することを可能にする。同様に、発射および再装填アセンブリ600の完全な後退の際に、回転結合器620は近位に引かれ、その結果、回転結合器620の歯付き近位部分627は最終的に、近位カム630の歯付き遠位部分632に接触する。近位カム630に接触する前であるが遠位カム640に接触して回転されられる前に、回転結合器620の歯付き近位部分627の歯は、上記のような回転結合器620のその元の位置からの回転に起因して、近位カム630の歯と整列する。従って、近位カム630の歯および回転結合器620の歯付き近位部分627の歯の、今は整列した構成に起因して、回転結合器620の歯付き近位部分627が推進されて近位カム630の歯付き遠位部分632と接触すると、回転結合器620は近位カム630に対して回転し、その結果、それぞれの歯が互いに対して相補的にずれ、従って、回転結合器620と近位カム630とが互いに嵌合することを可能にする。
【0042】
図7〜図10、図25〜図32、図78〜図79および図83〜図84を続けて参照すると、発射および再装填アセンブリ600の後退中に近位カム630と接触する際の回転結合器620の回転は、遠位カム640と接触する際の回転結合器620の回転の方向と類似である。実際に、各回転は、発射モードと再装填モードとの間での回転結合器620の部分的な回転に対応する。従って、使用において、発射および再装填アセンブリ600が最初に発射モードにある状態で、発射および再装填アセンブリ600の完全な前進は、駆動棒591が遠位に移動してステープル「S」をSULU 500から排出し、そして動的クランプ留め部材593を前進させてステープル留めされた組織を切断する場合に、起こる。発射行程の最後に達すると、回転結合器620は遠位カム640に接触し、そして発射モードから再装填モードへと部分的に回転させられるが、駆動棒591が回転結合器620から脱係合するほど充分には回転しない。従って、駆動棒591および回転結合器620が依然として係合している状態で、発射および再装填アセンブリ600が後退し得、これによって駆動棒591を後退させ得る。完全に後退すると、回転結合器620は近位カム630に接触し、そしてこの部分的に回転した配向から再装填モードへと回転し、ここで駆動棒591のアーム681、682が回転結合器620から脱係合し、そして再装填棒660、670が回転結合器620と係合する。
【0043】
発射および再装填アセンブリ600の引き続く完全な前進および後退の際に、再装填棒660、670は前進して、新たなセットのコンベヤリンク566を適切な位置に推進し、引き続く発射のために、カートリッジアセンブリ514のコンベヤ540、550のそれぞれの上部組織接触表面570、556を形成する。回転行程の終了時の回転結合器620と遠位カム640との接触は、回転結合器620を回転させて発射モードの方に部分的に戻し、そして後退の際に、回転結合器620と近位カム630との接触は、回転結合器620を回転させて駆動棒591との係合状態に戻し、その結果、発射および再装填アセンブリ600は、引き続く発射のために、発射モードに戻される。
【0044】
ここで図9および図26〜図31を参照すると、ロックリング650は、ロッキング特徴を提供し、このロッキング特徴は、発射および再装填アセンブリ600が発射モードにある場合に再装填棒660、670の前進を妨げ、そして発射および再装填アセンブリ600が再装填モードにある場合に駆動棒591の前進を妨げる。ロックリング650は、図8に示されるように、中心開口部分651、および対向する2対の移動止め部分652、655を備える。駆動棒591は、対向する1対の中間切り抜き部687、688を備え、これらの中間切り抜き部は、ロックリング650の移動止め部分652に受容されるように構成される。再装填棒660、670は各々が、それぞれ遠位切り抜き部666、676を備え、これらの遠位切り抜き部は、移動止め部分655に受容されるように構成される。
【0045】
各移動止め部分652、655は、それぞれの移動止め部分652、655に隣接するスロット653、656、およびスロット653、656にそれぞれ通じる角度の付いた表面654、657をさらに備える。第一の対の移動止め部分652のスロット653および第二の対の移動止め部分655のスロット656は、ロックリング650の周りで等しく間隔を空けておらず、むしろ、互いに対してずれている。この構成に起因して、以下に記載されるように、駆動棒591がスロット653と整列している場合、再装填棒660、670はスロット656に対してずれており、そして同様に、再装填棒660、670がスロット656と整列している場合、駆動棒591はスロット653に対してずれており、従って、ロックリング650のロッキング特徴を提供する。
【0046】
ロックリング650は、第一の位置(この位置において、駆動棒591は移動止め部分652のスロット653と整列しており、そして再装填棒660、670は移動止め部分655のスロット656に対してずれている)と第二の位置(この位置において、再装填棒660、670は移動止め部分655のスロット656と整列しており、そして駆動棒591は移動止め部分652のスロット653に対してずれている)との間で回転可能である。第一の位置(発射モードに対応する)において、駆動棒591は、駆動棒591とスロット653との整列に起因して、ロックリング650を通って並進することを可能にされ、一方で、再装填棒660、670のそれぞれの遠位切り抜き部666、676は、移動止め部分655の周りに配置され、再装填棒660、670の並進を妨げる。第二の位置(再装填モードに対応する)において、再装填棒660、670は、再装填棒660、670とスロット656との整列に起因して、ロックリング650を通って並進することを可能にされ、一方で、駆動棒591の中間の切り抜き部687、688は、移動止め部分652の周りに配置され、駆動棒591の並進を妨げる。
【0047】
移動止め部分652、655のそれぞれの角度の付いた表面654、657は、第一の位置と第二の位置との間でのロックリング650の回転を容易にする。より具体的には、発射モード中に駆動棒591が遠位に前進すると、駆動棒591が推進されて移動止め部分652の角度の付いた表面654と接触し、ロックリング650を回転させ、従って、駆動棒591がスロット653と整列すること、および再装填棒660、670のそれぞれの遠位切り抜き部666、676が移動止め部分655の周りに配置されることを確実にする。再装填モードにおいて、再装填棒660、670の遠位への前進中に、再装填棒660、670が推進されて移動止め部分655の角度の付いた表面657に接触し、ロックリング650を逆方向に回転させ、従って、再装填棒660、670がスロット656と整列すること、および駆動棒591の中間の切り抜き部687、688が移動止め部分652の周りに配置されることを確実にする。ロックリング650を推進して第一の位置および第二の位置まで回転させる駆動棒591も再装填棒660、670もない場合、付勢部材658および中心合わせプランジャー659が、ロックリング650を中心合わせされた位置に戻す。
【0048】
図33〜図36を、図1と合わせて参照すると、ステープラー10は一般に、上記のように、ハンドルアセンブリ12、回転ノブ14、関節運動レバー16、およびSULU 500に係合するように構成された細長本体部分18を備える。
【0049】
ハンドルアセンブリ12は、以下に記載されるように、アンビルアセンブリ506とカートリッジアセンブリ514との間に組織を把持するように、ステープル「S」のセット(図20〜図21)をSULU 500から発射するように、そして引き続く発射のためにSULU 500に再装填するために、選択的に作動可能である。より具体的には、ハンドルアセンブリ12は、組織をアンビルアセンブリ506とカートリッジアセンブリ514との間に把持するため、および複数のステープル「S」を組織に通して順次発射し、そしてアンビルアセンブリ506とカートリッジアセンブリ514との間に把持された組織を分割するために、把持具モードと発射モードとの間で並進可能である。ハンドルアセンブリ12は一般に、静止ハンドル部分20、トリガまたは可動ハンドル部分22、バレル部分24、および後退ノブ26を備える。アクチュエータボタン28が、ハンドルアセンブリ12を横方向に通り、ハンドルアセンブリ12の両側から外向きに突出する。ハンドルアセンブリ12は、1対のハウジングセクション12aおよび12bから形成され、これらのハウジングセクションは協働して、静止ハンドル部分20およびバレル部分24を形成する。ハウジングセクション12aおよび12bはまた、ハンドルアセンブリ12の内部構成要素を受容するための空洞30を規定する。これらの内部構成要素は、本明細書中以下により詳細に記載される。
【0050】
図33〜図36の参照を続けると、ハンドルアセンブリ12の可動ハンドル22は、ハウジングセクション12aと12bとの間で、旋回部材32の周りで旋回可能に支持される(図33)。付勢部材34は、ハウジング半セクション12aのポスト36aの周りに固定された第一の端部、および可動ハンドル22上に支持されたポスト36bに係合する第二の端部を有して、可動ハンドル22を静止ハンドル20から離れるように非圧縮位置(SULU 500のツールアセンブリ504の開位置または非クランプ位置に対応する)へと付勢する(図1を参照のこと)。
【0051】
起動シャフト38は、ハンドルアセンブリ12のバレル部分24内に支持され、そして歯付きラック40を備える。横方向に延びるウィング44aおよび44bを備えるラック係合フィンガー44を有する駆動つめ42が、可動ハンドル22の一端に、ポスト36bの周りで旋回可能に設置される。付勢部材48が、駆動つめ42の係合フィンガー44を起動シャフト38の歯付きラック40に向けて推進するように、配置される。可動ハンドル22は、駆動つめ42の係合フィンガー44を起動シャフト38の歯付きラック40と接触させるように動かして、起動シャフト38を遠位方向に直線状に前進させるように、旋回可能である。起動シャフト38の前端は、制御棒52(図41)の近位端50を回転可能に受容するための凹部39(図39)を備え、その結果、起動シャフト38の直線状の前進が、制御棒52の対応する直線状の前進を起こし、これが次に、対応して、発射および再装填アセンブリ600の回転結合器620を並進させて、発射および再装填アセンブリ600が発射モードにあるか再装填モードにあるかに依存して、駆動棒591または再装填棒660、670を前進させる(図26、図28を参照のこと)。
【0052】
垂直つめ54が、ハンドルアセンブリ12内に移動可能に支持され、そして付勢部材56によって、起動シャフト38の切り抜き部58の方へと付勢される。垂直つめ54は、切り抜き部58および歯付きラック40と係合して、起動シャフト38を長手軸方向に固定された位置に保持するように移動可能である。
【0053】
後退ノブ26(図1を参照のこと)を備える後退機構57が、結合棒60によって、起動シャフト38の近位端に接続される。結合棒60は、後退ノブ26を受容するための右および左の係合部分62aおよび62b、ならびに中心部分62cを備え、この中心部分は、起動シャフト38にその近位端に隣接して形成された1対の長手軸方向スロット64内で並進するような寸法および構成にされる。解放プレート66が起動シャフト38と作動可能に関連し、そして後退ノブ26の操作に応答して、この起動シャフトに対して動くように設置される。間隔を空けた1対のピン68が、起動シャフト38の横面から外向きに延びて、解放プレート66に形成された、対応する1対の角度の付いたカムスロット70に係合する。図81もまた参照すると、後退ノブ26の後方への動きの際に、ピン68が起動シャフト38に対して、そして歯付きラック40に対して、解放プレート66に下方にカム作用し、その結果、解放プレート66の底部が歯付きラック40の下に延びて、垂直つめ54および駆動つめ42の係合フィンガー44を歯付きラック40から脱係合させる。横断スロット72(図36)が、解放プレート66の近位端に形成されて、結合棒60の中心部分62cを収容する。結合棒60は、ばね76(図36)によって遠位に付勢され、このばねは、一端においてコネクタ78を介して結合棒部分60に固定され、そして他端において起動シャフト38のポスト80に固定される。結合棒60を遠位に推進することによって、解放プレート66は、歯付きラック40の上方の位置の方へ推進される。細長スロット74(図1を参照のこと)が、ハンドルアセンブリ12のバレル部分24に規定されて、後退ノブ26が後方に引かれる際に、結合棒60の長手軸方向並進に適応し、起動シャフト38を後退させ、従って、制御棒52(図41)を後方に後退させる。
【0054】
図36および図46を参照すると、ハンドルアセンブリ12は、ハンドルアセンブリ12のバレル部分24内で回転可能に支持された、後退アーム85を備える。ねじりばね87が、図46に見られるように、後退アーム85を反時計回りに回転させるように推進するように配置される。後退アーム85は、起動シャフト38の切り欠き89内に位置する突出部85aを備える。ばね87がアーム85を反時計回りに回転するように推進すると、突出部85aは起動シャフト38に係合して、起動シャフト38をハンドルアセンブリ12内で近位に推進する。
【0055】
図36および図46をなお参照すると、ステープラー10のハンドルアセンブリ12は、把持具顎機構100を備え、この把持具顎機構は、切断リンクアセンブリ102およびアクチュエータアセンブリ104を備える。以下でより詳細に議論されるように、切断リンクアセンブリ102は、ハンドルアセンブリ12が把持具モードにある場合に、垂直つめ54と起動シャフト38との係合を防止して、起動シャフト38の近位および遠位への動きがアンビルアセンブリ506をカートリッジアセンブリ516に対して開位置とクランプ位置との間で動かすことのみを可能にする(駆動アセンブリ590を発射することを可能にしない)ように機能する。アクチュエータアセンブリ104は、ハンドルアセンブリ12が把持具モードにある場合に、可動ハンドル22が非圧縮位置に完全に戻ることを防止して、駆動つめ42が歯付きラック40に係合することを防止する。これを行うことによって、可動ハンドル22の操作は、ハンドルアセンブリ12が把持具モードにある場合に、起動シャフト38がSULU 500(図1)のクランプ位置を越えて遠位に前進することを防止し、従って、駆動アセンブリ590(図10)の発射を防止する。
【0056】
切断リンクアセンブリ102は、近位リンク106および遠位リンク108を備える。近位リンク106は、可動ハンドル22に形成された円柱形ボス109に、旋回部材106aの周りで旋回可能に固定された近位端、および旋回部材109を介して遠位リンク108の近位端に旋回可能に固定された遠位端を有する。遠位リンク108は、ハンドルアセンブリ12のハウジングキャビティ30内に規定されたトラックに沿って直線状にスライド可能であり、そしてその近位端に形成された、角度の付いた段状部分108aを備える。遠位リンク108は、垂直つめ54に形成されたカム表面110に係合するように、スライド可能に位置する。上で議論されたように、垂直つめ54は、付勢部材56によって、起動シャフト38に形成された切り抜き部58(図39および図40)と係合するように上方に推進されて、SULU 500(図1)がクランプ位置まで移動した後に起動シャフト38の移動を防止する。可動ハンドル22を静止ハンドル20の方に移動させることによって、遠位リンク108の段状部分108aが遠位に移動して垂直つめ54のカム表面110と係合する場合、垂直つめ54は、付勢部材56の付勢に逆らって下方に移動し、起動シャフト38の切り抜き部58との係合から外れる。これが起こると、起動シャフト38は、以下でより詳細に議論されるように、近位に自由に動く。
【0057】
図58もまた参照すると、アクチュエータアセンブリ104は、アクチュエータボタン28、つめアーム116および把持つめ118を備える。以下により詳細に記載されるように、アクチュエータボタン28は、ステープラー10のハンドルアセンブリ12を把持具モードと発射モードとの間で並進させるために、中心合わせされた位置と中心からずれた位置との間で選択的に移動可能である。つめアーム116は、可動ハンドル22に形成された凹部120(図46)にスライド可能に受容される。付勢部材122が、凹部120内に配置されて、つめアーム116を延長位置(図61)の方へと推進する。つめアーム116は、間隔を空けた上下の三角形のカム表面116aおよび116bを有し、これらは、以下でより詳細に議論される。把持つめ118は、つめアーム116の遠位端に形成されたスロット118a(図58)内で旋回可能に支持される。付勢部材124(図36)は、ピストン124aを把持つめ118内に推進して、把持つめ118を、図74に見られるように反時計回り方向に推進するように配置される。把持つめ118の旋回運動は、つめアーム116が起動シャフト38の歯付きラック40(図74)上をラチェット作用またはスライドすることを可能にする。
【0058】
図59もまた参照すると、アクチュエータボタン28は、可動ハンドル22に形成されたボア126(図36)を通って、中心合わせされた位置(図59)から中心からずれた位置(図70)へとスライド可能であるように配置される。ボア126は、凹部120と実質的に直交しており、その結果、アクチュエータボタン28は、つめアーム116の上カム表面116aと下カム表面116bとの間にスライド可能に配置される。アクチュエータボタン28は、実質的に円柱形であり、そして直線状リブ128およびV字型カム部材130を備える。V字型カム部材130はスロット132(図58)を規定し、このスロットは、アクチュエータボタン28が中心合わせされた位置にあり、そしてつめアーム116が凹部120内で延長位置にある場合に、つめアーム116の下カム表面116bを受容するように構成される。アクチュエータボタン28は、スロット132の両側に凹部134(図59)を規定する。アクチュエータボタン28の両端は、ハンドルアセンブリ12(図59)のハウジングセクション12aおよび12bの両側から延び、そしてハンドルアセンブリ12のいずれの側からでも外科医により押されて、アクチュエータボタン28を、ボア126を通していずれの方向にでも直線状に動かして、アクチュエータボタン28を中心合わせされた位置から中心からずれた位置へと動かし得る。アクチュエータボタン28がボア126内で直線状に移動すると、下カム表面116bはV字型カム部材130により係合されて、つめアーム116をその最初の延長位置から下向きに凹部120内で、その後退位置へと推進する。アクチュエータボタン28がその中心からずれた位置へと直線状に移動し、そしてつめアーム116がカム作用されてその後退位置にくると、下カム表面116bの頂点が凹部134のうちの1つに受容されて、アクチュエータボタン28をその中心からずれた位置、または起動位置に保持する(図70を参照のこと)。つめアーム116がその後退位置まで移動すると、把持つめ118もまた、最初の延長位置から後退位置へと移動し、そして起動シャフト38のスロット136(図40)から引き抜かれる。
【0059】
図1、図49および図67を参照すると、アクチュエータボタン28は、可動ハンドル22に支持され、そしてハンドルアセンブリ12のハウジングセクション12aおよび12bの各々を通って延びる。可動ハンドル22を用いてアクチュエータボタン28を動かすことを容易にする目的で、円弧状スロット90が、ハウジングセクション12aおよび12bの各々に提供される。隆起した表面またはボス92が、円弧状スロット90の一部分の周りに提供されて、可動ハンドル22が圧縮位置に移動するまで、アクチュエータボタン28の押下を防止する。
【0060】
図36、図41および図47を参照すると、回転ノブ14は、成形された半セクション14aおよび14bから構成される。各半セクション14a、14bは、内部環状突出部450をその近位端に備え、この突出部は、ハンドルアセンブリ12の遠位端に形成された環状凹部452に受容されて、回転ノブ14をハンドルアセンブリ12に回転可能に固定する。各成形半セクション14aおよび14bの遠位端は、取付具456を回転不可能に受容するための凹部454(図47)を規定する。取付具456は、半セクション14aおよび14bに形成された突出部458(図47)を受容するための切り抜き部456aを備える。取付具456は、本体18の近位端にしっかりと固定され、その結果、回転ノブ14の回転は、本体18、および従って、SULU 500(図1)の回転を起こす。
【0061】
図41〜図44および図47を参照すると、関節運動機構300は、回転可能ノブ14(図41)に形成されたレセプタクル15内に支持され、そして関節運動可能なSULUを関節運動させるように構成される。SULU 500(図1)は、関節運動機構を備えるように図示されないが、SULU 500(図1)は、関節運動機構300の操作に応答して、すなわち、関節運動レバー16の回転の際に、SULU 500(図1)を関節運動させるように構成された関節運動特徴を備えることが想定される。あるいは、ステープラー10は、関節運動するSULUおよび関節運動しないSULUと一緒に使用可能な、相互適合(cross−compatible)デバイスとして構成され得る。関節運動しないSULUと一緒に使用される場合、関節運動アセンブリ300は単に、作動不可能である。
【0062】
関節運動機構300は、関節運動レバー16、機構カバー320、付勢部材322、上クラッチ324、下クラッチ326、メインシャフト328、および並進部材330を備える。下クラッチ326は、レセプタクル15内に回転可能に固定され、そして一連の浅い切込み336および間隔を空けた1対の深い切込み338を有する、円形切込み部分334を備える(図42)。下クラッチ326はまた、メインシャフト328を受容するための寸法にされた中心貫通穴340を規定する。上クラッチ324は、メインシャフト328に回転可能に固定され、そして上表面350および下表面352を有するベース部分344を備える。(図44)。下表面352は、間隔を空けた複数の突出部354を備え、これらの突出部は、下クラッチ326の浅い切込み336および深い切込み338に受容される。付勢部材322は、上クラッチ324の下表面352を推進して、下クラッチ326の切込み部分334と係合させ、関節運動機構300を固定位置に解放可能に固定し、従って、関節運動可能なSULUを関節運動についての固定された角度で解放可能に固定する。
【0063】
メインシャフト328は、実質的に円柱形の本体部分358およびディスク形状のベース部分360を備える。ベース部分360は、カム部材364を受容する開口部362を規定する。本体部分358は、下クラッチ326と上クラッチ324との両方を通って延びるような寸法にされ、その結果、ベース部分360は、回転ノブ14のレセプタクル15内で、上クラッチ324および下クラッチ326の下に配置される。並進部材330(図42)は、メインシャフト328のカム部材364をスライド可能に受容するような寸法にされたカムスロット376を備える。
【0064】
関節運動レバー16が回転すると、上クラッチ324のベース部分344は、下クラッチ326の切込み部分334に対して回転して、上クラッチ324を上方に、付勢部材322の付勢に逆らって推進し、突出部354を切込み部336または338から脱係合させ、そして上クラッチ324およびメインシャフト328の回転を可能にする。その後、付勢部材322は、上クラッチ324を下方に推進して、突出部354を推進して、次の切込み部と係合するように戻す(図41)。突出部354は、SULUがその非関節運動位置にある場合に深い切込み338に受容されるように配置されて、SULUのその非関節運動位置からの移動に対する抵抗を増大させる。関節運動レバー16の回転はまた、並進部材330に対するカム部材364の回転を起こす。カム部材364が回転で駆動されると、並進部材330は、直線状に移動するように推進される。並進部材330は、関節運動可能なSULUの関節運動リンク333に係合するように構成され、その結果、並進部材330の直線状の移動は、関節運動リンク333の直線状の移動を起こして、関節運動可能なSULUの関節運動を起こす。
【0065】
図34、図37、図38、図41および図47〜図57を参照すると、ステープラー10は、SULU解放リンクアセンブリ200を備え、このSULU解放リンクアセンブリは、SULU解放リンク202、SULU解放ボタン204および付勢部材206を備える。解放ボタン204は、把持表面204aを備え、そして回転ノブ14に形成されたキャビティ208内にスライド可能に配置される(図47)。解放ボタン204は、中心壁210および横方向に延びるポスト212を備える。付勢部材206は、中心壁210の近位表面と回転ノブ14に形成されたばねポスト214との間に配置されて、解放ボタン204をキャビティ208内で遠位へと推進する。
【0066】
図37および図38を参照すると、解放リンク202は、近位端202a、細長中心本体部分202bおよび遠位端202cを備える。近位端202aは、解放ボタン204のポスト212を受容するような寸法にされためくら穴(図示せず)を規定し(図34)、その結果、付勢部材206は、ボタン204およびリンク202を遠位方向に推進する。解放リンク202の遠位端202cは、遠位当接部材216および横方向延長部218を備える。横方向延長部218の近位端は、傾斜したカム表面220を規定し、そして横方向延長部218の遠位端は、当接部材216と一緒にタブ保持凹部220を規定する。横方向延長部218はまた、矩形開口部222を備える。
【0067】
図41および図47〜図57を参照すると、ステープラー10の細長本体部分18は、外側管230および内側本体部分232を備え、この内側本体部分を通して制御棒52が挿入される。内側本体232は、外側管230に受容され、そして直径方向に間隔を空けた1対の長手軸方向チャネル234(図52)、および近位に間隔を空けた環状チャネル235を規定する遠位端232aを備え、この環状チャネルは、長手軸方向チャネル234と交差する。内側本体232はまた、解放リンク202をスライド可能に受容するための凹部236(図48)を規定し、その結果、解放リンクが外側管230と内側本体部分232との間でスライド可能に配置される。本体232から半径方向外向きに延びる突出部238が、解放リンク202の横方向延長部218の矩形開口部222内へと延びる。ばね240が、矩形開口部222内で、突出部238と開口部222の遠位端との間に配置されて(図38)、解放リンク202を遠位に推進する。
【0068】
フック242が、外側管230と内側本体部分232との間に、傾斜したカム表面220に隣接して配置される。フック242は、横方向の遠位端246を有する細長本体244を備える。横方向の遠位端246は、制御棒52の切り抜き部248に隣接して配置される。フック242は、付勢部材250によって、フック242の遠位端246が切り抜き部248の外側に位置する位置に推進される。解放ボタン204を近位に引くことによって、解放リンク202が付勢部材206および240の推進に逆らって近位に動かされる場合、カム表面220は、フック242の遠位端246を制御棒52の切り抜き部248内に移動させる。制御棒52が図48に示される後退位置になく、そして切り欠き248がフック242の遠位端246を受容するように配置されない場合、カム表面220は、フック242を内向きに移動させることができず、そしてリンク202は、近位に移動することができない。従って、制御棒52が後退位置にない場合、SULUは、取り外しも取り付けもできない。
【0069】
図50〜図57を参照すると、SULU 500をステープラー10の細長本体18に固定する目的で、タブ260は、内側本体232の長手軸方向チャネル234と整列し、そしてこの長手軸方向チャネル234を通って、図53において矢印「H」により示される方向に前進し、そして矢印「I」により示される方向に回転して環状チャネル235に入らなければならない。上で議論されたように、当接部材216は、タブ260が長手軸方向チャネル234を出るとタブ260に係合するように配置される。タブ260が解放リンク202の当接部材216に係合すると、解放リンク202は、タブ260が完全に環状チャネル235内に位置するまで、図51において矢印「J」により示される方向に、付勢部材206および240の推進に逆らって、近位に移動する。これが起こると、フック242がカム表面220により移動させられて、制御棒52の切り抜き部248に入る。タブ260が完全に環状チャネル235内に位置すると、SULU 500は、図56において矢印「K」により示される方向に、細長本体部分18に対して回転し、その結果、タブ260が移動して、長手軸方向チャネル234との整列から外れる(図56)。これが起こると、解放リンク202は、図57において矢印「L」により示される方向に、その遠位位置に戻り、その結果、タブ260は、タブ保持凹部220a内に保持される。タブ260がタブ保持凹部220a内に位置する場合、SULU 500は、本体部分18に対して回転することを妨げられ、従って、本体部分18上にロックされる。
【0070】
SULU 500を本体部分18から取り外す目的で、SULU解放ボタン204が、図50において矢印「M」により示される方向に近位に動かされて(図50)、当接部材216を近位に後退させ、そしてタブ260をタブ保持凹部220aから外す。タブ260が凹部220aを越えると、SULU 500は回転して、タブ260を長手軸方向チャネル234と整列させ得、そしてSULU 500は、本体部分18から取り外され得る。
【0071】
ステープラー10はまた、SULU 500がステープラー10の本体部分18に取り付けられる前にはステープラー10の作動を防止するための、センサ機構400を備える。図36、図41、図48、および図50を参照すると、センサ機構400は、第一のリンク402、スペーサー404、接続管406、関節運動ロック部材408、第二のリンク410、および起動シャフトロック部材412を備える。第一のリンク402は、プレート様部材を備え、このプレート様部材は、制御棒52と、ステープラー10の細長本体部分18の内側本体部分232との間で、平坦な表面上で支持され、この平坦な表面は、制御棒52に押し付けられる。SULU 500を細長本体部分18に取り付ける前に、第一のリンク402の遠位端402a(図48)は、SULU 500が本体部分18に取り付けられる際にSULU 500の近位端に係合するように、配置される。第一のリンク402は穴414(図41)を備え、この穴は、スペーサー404に形成された突出部416(図48)を受容するような寸法にされる。スペーサー404は、第一のリンク402と外側管230の内側表面との間に、わずかに干渉しながら嵌る。スペーサー404、リンク402および制御棒52の平坦な表面は、一緒に機能して、制御棒52がハウジング232内で回転することを防止する。このことは、フック242と制御棒52の切り欠き248との間の適切な回転整列を確実にする。第一のリンク402の近位端402bは、接続管406の遠位端に当接し、その結果、第一のリンク402の直線状の移動は、センサ管406の直線状の移動を起こす。
【0072】
接続管406は、制御棒52の周りでスライド可能に配置され、そして近位端406aを有する。この近位端は、ロック部材408(図50)の遠位面408aに当接する。ロック部材408もまた、制御棒52の周りでスライド可能に配置される。接続管406が第一のリンク402によって近位に動かされる場合、ロック部材408もまた近位に移動する。ロック部材408は、実質的に円筒形であり、そしてロックタブ420、および関節運動機構300の並進部材330を支持するための上平面421を備える。
【0073】
第二のリンク410(図36)は、ロック部材408の近位端408bに係合するように配置された遠位端410a、およびロック部材412に係合するように配置された近位端410bを有する。第二のリンク410の遠位端410aは、ロック部材408の近位面に当接するように配置された拡大ヘッド426を備える。近位端410bは、ロック部材412に形成された430ウィングに係合するように配置された、段状部分428を備える。付勢部材440は、第二のリンク410を遠位に推進して、ロック部材412との係合から外す。
【0074】
ロック部材412は、ハンドルアセンブリ12内で、ハウジングセクション12aと12bとの間に、旋回部材432の周りで旋回可能に固定される。付勢部材436は、ロック部材412を推進して、起動シャフト38に形成されたスロット434(図40)に入れ、起動シャフト38をその後退位置にロックする。ロック部材408が近位に移動して第二のリンク410を近位に移動させる場合、第二のリンク410の近位端410bは、ロック部材412のウィング430に係合して、ロック部材412を起動シャフト38から脱係合させて、起動シャフト38の遠位への移動を可能にする。
【0075】
SULU 500をステープラー10に取り付ける前に、ロック部材412は、起動シャフト38のスロット434内に配置されて、シャフト38の移動を防止する。SULU 500が内側本体232の遠位端232aに挿入されると(図48)、SULU 500の近位端は第一のリンク402に係合し、そして第一のリンク402、接続管406、ロック部材408および第二のリンク410を近位に移動させる。第二のリンク410が近位に移動すると、リンク410の近位端410bはロック部材412のウィング430に係合して、ロック部材412を起動シャフト38内のスロット434から旋回させて、起動シャフト38のロックを解除する。
【0076】
ステープラー10の使用および操作が、図59〜図91を参照しながら記載される。最初に、発射および再装填アセンブリ600が発射モードに配置され、このモードにおいて、駆動棒591は回転結合器620に係合する(図30〜図31および図63〜図64を参照のこと)。図59〜図61を参照すると、上記のように、アクチュエータボタン28がその中心合わせされた位置にある状態で、つめアーム116は、付勢部材122によってその延長位置に推進される。つめアーム116がその延長位置にある場合、把持つめ118は、起動シャフト38に形成されたスロット136(図61)内に延びるように配置される。この位置は、ハンドルアセンブリ12の把持具モードに対応する。従って、可動ハンドル22が図60において矢印「A」により示される方向に起動されると、駆動つめ42は起動シャフト38のアバットメント138(図61)に係合して、起動シャフト38を、図61において矢印「B」により示される方向に遠位に前進させて、制御棒52を遠位に移動させる。制御棒52の遠位への並進は、次に、回転結合器620を遠位に並進させ、これが駆動棒591および動的クランプ留め部材593を遠位に推進して、上記のようにSULU 500をクランプ位置に移動させる。この把持具モードにおいて、垂直つめ54が起動シャフト38から脱係合するので、可動ハンドル22は、非圧縮位置に戻って制御棒52を近位に戻し得、従って、駆動棒591を近位に並進させ、そしてSULU 500を非クランプ位置(図3)に戻し得る。
【0077】
ハンドルアセンブリ12が把持具モードにある場合、可動ハンドル22を静止ハンドル20の方へと圧縮すること、および可動ハンドル22を静止ハンドル20から離れた非圧縮位置に戻すことにより、SULU 500のクランプおよび脱クランプがそれぞれ起こる。より具体的には、図63〜図66をさらに参照すると、可動ハンドル22を静止ハンドル20の方へと圧縮すると、制御棒52は部分的に遠位に前進し、その結果、回転結合器620が部分的に遠位に推進され、従って、駆動棒591を遠位に推進し、その結果、動的クランプ留め部材593の上梁593aがT字型チャネル509の上部の横向き部分内に前進し、遠位梁593bが枠部材516および中心支持部材531の外側に沿って並進し、そして直立部材593cがチャネル574内に並進して、アンビルアセンブリ506をカートリッジアセンブリ514に対して旋回させて、クランプ位置にする(図3〜図6を参照のこと)。駆動棒591のこの部分的な前進は、駆動棒591の約15mmの増分に対応し得るが、他の増分距離もまた、SULUの構成に依存して想定される。可動ハンドル22を非圧縮位置に戻すと、制御棒52が近位に戻り、その結果、回転結合器620が近位に戻る。回転結合器620の近位への並進は、駆動棒591の近位への並進(例えば、近位方向に約15mm)を起こし、その結果、上梁593aは、T字型チャネル509の上部横向き部分から外され、遠位梁593bは、枠部材516および中心支持部材531の外部で近位に並進し、そして直立部材593cは、チャネル574から外されて、アンビルアセンブリ506をカートリッジアセンブリ514に対して旋回させ、非クランプ位置に戻す(図3〜図6を参照のこと)。
【0078】
特に図63〜図64を参照すると、回転結合器620が部分的にのみ遠位に並進し(例えば、15mmの増分)、引き続いて近位に戻る場合、回転結合器620は遠位カム640の近位に残り、従って、ハンドルアセンブリ12が把持具モードにある間に繰り返し圧縮および解放される際に、発射および再装填アセンブリ600は、発射モードに配置されたままである。すなわち、ハンドルアセンブリ12が把持具モードにある状態で、アンビルアセンブリ504は、上記のように、発射および再装填アセンブリ600を再装填位置に並進させることなく、開位置(図3)とクランプ位置(図4)との間で繰り返し旋回可能である。
【0079】
図59〜図61を再度参照すると、把持具モードにおいて、可動ハンドル22が静止ハンドル20の方へと圧縮されるにつれて、遠位リンク108もまた、図61において矢印「C」により示される方向に遠位に移動し、その結果、遠位リンク108の段状部分108aは、垂直つめ54のカム表面110に係合して、垂直つめ54を下向きに、図61において矢印「D」により示される方向に、ばね112の付勢に逆らって、起動シャフト38の切り抜き部58から離れる方に推進する。
【0080】
図62も参照すると、可動ハンドル22がその非圧縮位置に、図62において矢印「E」により示される方向に、ばね34によって戻される場合、把持つめ118は、スロット136を規定する起動シャフト38の近位部分136aに係合して、可動ハンドルを、非圧縮位置と圧縮位置との間の中間位置に保持する。ばね34が軽いばねであり、SULU 500の構成要素に関連する摩擦に起因して、起動シャフト38(および制御棒52)を近位に動かし得ないことが留意される。しかし、外科医は、ハンドル22を図62において矢印「E」により示される方向に動かすことによって、可動ハンドル22を操作し得、起動シャフト38を矢印「B」により示される方向に動かし得、従って、SULU 500(図1)を非クランプ位置(図3)に動かし得る。垂直つめ54が遠位リンク108によってその後退位置に維持されるので、起動シャフト38は、近位に移動することを許容される。可動ハンドル22は、把持つめ118とスロット136の近位部分136aとの係合によって、その完全に非圧縮の位置に動くことを防止される。このことは、遠位リンク108の段状部分108aを垂直つめ54のカム表面110から脱係合させる位置まで遠位リンク108を可動ハンドル22が後退させることを防止する。従って、垂直つめ54は起動シャフト38から脱係合したままであり、従って、ハンドルアセンブリ12は把持具モードにあるままである。
【0081】
図67〜図74を参照すると、可動ハンドル22が圧縮位置に移動し、そしてアクチュエータボタン28が中心合わせされた位置から中心からずれた位置へと移動する場合、ハンドルアセンブリ12は、発射モードに並進される。より具体的には、可動ハンドル22が圧縮位置に移動し、そしてアクチュエータボタン28が中心合わせされた位置から中心からずれた位置へと移動する場合、V字型カム部材130がつめアーム116の下カム表面116bに係合して、つめアーム116を矢印「F」により示される方向に、可動ハンドル22の凹部120(図68)内で後退させ、そして把持つめ118を起動シャフト38のスロット136内から後退させる。把持つめ118がスロット136から外されると、付勢部材34(図61)は、可動ハンドル22を図73において矢印「G」により示される方向に戻して、その完全に非圧縮の位置にする。これが起こると、遠位リンク108は、可動ハンドル22により近位に引かれ、遠位リンク108の段状部分108aを垂直つめ54のカム表面110から脱係合させる。垂直つめ54は、付勢部材56によって、起動シャフト38の切り抜き部58と係合するように動かされ、起動シャフト38の近位運動を防止する(すなわち、起動シャフト38がその最初の位置に戻る後退を防止する)。従って、制御棒52(図60)、回転結合器620(図63)、および駆動棒591(図63)もまた、それぞれの最初の位置に近位に戻ることを妨げられる。従って、図74に示されるように、可動ハンドル22が再度、圧縮位置に移動すると、駆動つめ42(図61)は、起動シャフト38の歯付きラック40に係合して、起動シャフト38をさらに遠位に(例えば、さらに15mmの増分で)前進させ、従って、制御棒52(図60)、回転結合器620(図63)、および駆動棒591(図63)をさらなる増分だけ前進させて、SULU 500(図1)を少なくとも部分的に発射させる。起動シャフト38が遠位に移動するにつれて、垂直つめ54および把持つめ118が、起動シャフト38の歯付きラック40上をラチェット作用するか、またはスライドする。
【0082】
図74〜図80を参照すると、上記のように、ハンドルアセンブリ12が発射モードにある状態で可動ハンドル22が圧縮位置に移動する場合(図74を参照のこと)、駆動つめ42(図61)は、起動シャフト38の歯付きラック40に係合して、起動シャフト38を前進させ、制御棒52(図60)を遠位にさらなる増分で前進させる。発射および再装填アセンブリ600が発射モードに位置する状態で、制御棒52が遠位にさらなる増分で前進すると、回転結合器620も同様に、次第に遠位に並進する。回転結合器620のこの遠位への並進は、次に、駆動棒591の遠位への並進を起こす。なぜなら、回転結合器620のブロック突出部622が駆動棒591の対向する切り抜き部683、684に受容されるからである。より具体的には、駆動棒591は、遠位にさらなる増分で、ロックリング650に対して前進し、ロックリング650を第一の位置に回転させ、従って、再装填棒660、670の並進を妨げ、そしてこのロックリングを通る駆動棒591の前進を可能にする。
【0083】
駆動棒591がこの増分で前進すると、駆動棒591に結合されたカム棒595もまた、この増分の長さ(例えば、約15mm)だけ遠位に前進する。従って、カム棒595のカム楔596は最終的に、コンベヤ540、550の最近位のプッシャー580と接触するまで並進する。カム棒595のカム楔596が最近位のプッシャー580と接触すると、最近位のプッシャー580は、コンベヤ540、550の下部分のコンベヤリンク566から、コンベヤ540、550のそれぞれの上部組織接触表面570、556に配置されたコンベヤリンク566内へと部分的に、中間位置まで推進されて、この中間位置において、最近位のプッシャー580は、上下のコンベヤリンク566の各々の中に部分的に配置される。1つの実施形態において、最近位のコンベヤリンク566は、図65〜図66に示されるように、内部に配置されたステープル「S」を備えず、従って、この時点ではステープル「S」は発射されない。最近位のプッシャー580が上下のコンベヤリンク566の各々の中に部分的に配置される、この中間位置への最近位のプッシャー580の並進は、コンベヤ540、550が回転しないようにロックし、従って、引き続く発射操作中に、コンベヤリンク566の適切な配置が維持されることを確実にする。
【0084】
図72を参照すると、アクチュエータボタン28が起動されてその中心からずれた位置にある場合、すなわち、ハンドルアセンブリ12(図1)が発射モードにある場合、直線状リブ128は、ハウジングセクション12aの内壁に配置されたカム表面144に係合する位置に移動する。カム表面144は、角度の付いた面を備え、この角度の付いた面は、可動ハンドル22(図67)がその非圧縮位置に戻る際に、直線状リブ128に係合するように位置して、アクチュエータボタン28をその中心合わせされた位置に戻す。上カム表面116aとV字型カム部材130との相互作用もまた、アクチュエータボタン28をその中心合わせされた位置に推進する。これが起こると、つめアーム116および把持つめ118は、それらの延長位置に戻る。起動シャフト38が遠位に前進しており、そして把持つめ118が起動シャフト38のスロット136と整列していないので、可動ハンドル22は、可動ハンドル22の各起動行程後に、その非圧縮位置に戻る。
【0085】
可動ハンドル22の引き続く圧縮の際に、制御棒52、回転結合器620、および駆動棒591は、さらなる増分で遠位に並進する。駆動棒591がこのさらなる増分で(例えば、さらに15mm)前進すると、駆動棒のカム楔596が推進されて、コンベヤ540、550の下部のコンベヤリンク566内に配置されたプッシャー580と接触する。カム棒595がさらに遠位に推進されるにつれて、カム楔596を規定する角度の付いた表面が、プッシャー580の角度の付いた表面584に沿ってカム作用し、その結果、プッシャー580は、カートリッジアセンブリ614の上部組織接触表面を形成するコンベヤリンク566内に上向きに推進されて、ステープル「S」を排出する。カム棒595の前進よりわずかに遅れて、動的クランプ留め部材593がチャネル574を通って前進して、コンベヤ540と550との間の組織を分割する。理解され得るように、駆動棒591のこの増分(15mm)での前進は、次の最近位の群のコンベヤリンク566からのステープル「S」のみを発射し、そしてこれらのコンベヤリンク566に隣接する組織のみを切断する。可動ハンドル22の引き続く圧縮は、駆動棒591をさらに遠位に(15mmの増分で)次第に前進させ、その結果、さらなる群のステープル「S」が、それぞれのコンベヤリンク566から排出され、そしてその結果、さらなる組織の部分が切断される。従って、ステープル線の長さ(例えば、15mm、30mm、45mmなど)に依存して、アンビルアセンブリ506とカートリッジアセンブリ514との間に把持された組織の全部分をステープル留めして分割するためにSULU 500を完全に発射するためには、可動ハンドル22を数回圧縮して戻すことが必要とされ得る。あるいは、ハンドルアセンブリ12は、可動ハンドル22の1回の圧縮でステープル「S」を排出して組織を切断するために、SULU 500が完全に発射されるように構成されてもよい。
【0086】
SULU 500が完全に発射された後に、すなわち、駆動棒591の全発射行程の終了時に、回転結合器620は、遠位カム640の歯付き近位部分642に接触し、そしてそれぞれの歯の係合に起因して、遠位カム640に対して部分的に回転する。
【0087】
図81〜図86を参照すると、一旦、SULU 500が完全に発射されて、制御棒52ならびに従って発射および再装填アセンブリ600の回転結合器620を近位に並進させると、後退ノブ26(図36)が近位に並進する。より具体的には、後退ノブ26(図36)の後退の際に、回転結合器620が近位に移動し、その結果、回転結合器620の歯付き近位部分627が最終的に、近位カム630の歯付き遠位部分632に接触して、回転結合器620を、部分的に回転した位置から、駆動棒591が回転結合器620から脱係合し、そして再装填棒660、670が回転結合器620に係合する位置へと回転させる。この位置は、発射および再装填アセンブリ600の再装填モードに対応する。
【0088】
図87〜図91をさらに参照すると、発射および再装填アセンブリ600が今は再装填モードにある(再装填棒660、670が回転結合器620に係合している)状態で、可動ハンドル22(図36)が再度圧縮されて、SULU 500を再装填し得、その結果、新たなセットのコンベヤリンク566が、カートリッジアセンブリ514の上部組織接触表面を形成する。SULU 500を再装填する目的で、可動ハンドル22(図36)が初めて圧縮されて、制御棒52および回転結合器620を遠位に1増分だけ前進させる。回転結合器620が遠位に前進すると、再装填モードにおいて回転結合器620に結合している再装填棒660、670が同様に、1増分だけ遠位に並進する。再装填棒660、670がこの初期の増分で並進すると、再装填棒660、670は、ロックリング650を通って遠位に並進し、従って、ロックリング650を第二の位置に回転させ、駆動棒591の並進を妨げる。可動ハンドル22の引き続く圧縮の際に、再装填棒660、670は、さらに遠位に次第に並進し、その結果、再装填棒660、670は、カートリッジアセンブリ514の上部組織接触表面を形成する最近位のコンベヤリンク566の近位端に接触し、そしてコンベヤリンク566を遠位に推進し、その結果、コンベヤ540、550が、それぞれ近位スプロケット542、552および遠位スプロケット544、554の周りで回転する。最終的に、図87〜図89に最もよく示されるように、可動ハンドル22の充分な回数の圧縮の際に、コンベヤ540、550が回転し、その結果、新たなセットのコンベヤリンク566が、カートリッジアセンブリ514の上部組織接触表面を形成するように配置され、同時にコンベヤリンク566(今は内部に配置されたプッシャー580を備える。先に発射されたステープルを支持していた)が遠位スプロケット544、554の周りで回転して、カートリッジアセンブリ514の下部分にくる。理解され得るように、一旦、プッシャー580がカートリッジアセンブリ514の下部分に配置されると、新たなセットのコンベヤリンク566がカートリッジアセンブリ514の上部分に位置する状態で、カートリッジアセンブリ514は、引き続く使用のために完全に再装填される。
【0089】
図87〜図91をなお参照し、特に図90を参照すると、再装填棒660、670の完全再装填行程が達成されて、新たなセットのコンベヤリンク566を、カートリッジアセンブリ514の上部組織接触表面を形成する位置に回転させると、回転結合器620は遠位カム640の歯付き近位部分642に接触し、そしてそれらの歯の係合に起因して、遠位カム640に対して部分的に回転する。その後、例えば後退ノブ26(図1)の後退によって、回転結合器620を完全に後退させると、回転結合器620が近位に引かれ、その結果、回転結合器620の歯付き近位部分627が最終的に、近位カム630の歯付き遠位部分632に接触し、回転結合器620を、部分的に回転した位置から、再装填棒660、670が回転結合器620から脱係合して駆動棒591が回転結合器620に係合する位置へと回転させる。この位置は、発射および再装填アセンブリ600の発射モードに対応する。理解され得るように、発射および再装填アセンブリ600が再度発射モードに配置され、そしてコンベヤ540、550が、新たなセットのステープル収容コンベヤリンク566をカートリッジアセンブリ514の上表面に配置するように回転した状態で、ステープラー10は、上記と同様に作動して、第二のセット、第三のセットなどのステープル「S」を発射し得る。
【0090】
解放可能なSULU 500に関連して記載されたが、外科手術用ステープラー10はまた、一体化されたツールアセンブリで形成され得ることが想定される。より具体的には、カートリッジアセンブリおよびアンビルアセンブリ(すなわち、ツールアセンブリ)は、ステープラー10の細長本体部分18と一体的に形成され得、その結果、例えば、コンベヤ540、550は、増大した長さを規定して、より多数回の発射/再装填操作を可能にし得る。ステープラー10はまた、(内視鏡手順ではなく)観血外科手術手順と組み合わせて使用するために適合され得る。ステープラー10は、ハンドルアセンブリ12の起動によって作動可能であるのではなく、ロボットによって、または他の任意の適切なシステムもしくは機構によって、作動される(例えば、発射および再装填される)ように構成されることもまた、想定される。
【0091】
最後に、コンベヤアセンブリ以外の機構が、ステープラーの再装填を行うために提供され得ることもまた想定される。例えば、回転可能バレルアセンブリが想定される。この回転可能バレルアセンブリは、長手方向軸を規定し、そして複数列またはセットのリンク(コンベヤリンク566と類似)を備える、回転可能バレルを備え得、これらのリンクは、等間隔の種々の円周上の位置(例えば、0°(この角度でこれらのリンクは、組織接触表面を形成する)、90°、180°、および270°)で、この回転可能バレルに係合する。このような実施形態において、駆動棒が、回転可能バレルを通して前進させられて、この組織接触表面を形成するリンクから、ステープルを排出し得る。その後、このバレルは、長手方向軸の周りで回転して、新たなセットのリンクが引き続く発射のために組織接触表面を形成するように、位置させ得る(すなわち、新たなセットのリンクを0°の位置まで回転させ得る)。
【0092】
上記のことから、種々の図面を参照して、当業者は、特定の改変もまた、本開示の範囲から逸脱することなく本開示に対してなされ得ることを理解する。本開示の数個の実施形態が図面に示されたが、本開示はこれらに限定されることを意図されない。なぜなら、本開示は当該分野が許容すると同程度に範囲が広いこと、および本明細書も同様に読まれることが意図されるからである。従って、上記説明は、限定であると解釈されるべきではなく、単に、特定の実施形態の例示であると解釈されるべきである。当業者は、添付の特許請求の範囲の趣旨および範囲内で、他の改変を予測する。
【符号の説明】
【0093】
10 ステープラー
12 ハンドルアセンブリ
14 回転ノブ
16 関節運動レバー
18 細長本体部分
500 SULU
502 近位本体部分
504 ツールアセンブリ
506 アンビルアセンブリ
514 カートリッジアセンブリ
【技術分野】
【0001】
(背景)
(技術分野)
本願は、外科手術用ステープル留め装置に関し、そしてより特定すると、連続的に複数の外科手術用ファスナーを身体組織に付け、そして固定された組織を切開するための、再装填可能な複数発射の内視鏡外科手術用ステープル留め装置に関する。
【背景技術】
【0002】
(関連技術の背景)
組織が最初に、対向する顎構造体の間に把持またはクランプされ、次いで外科手術用ファスナーにより接合される外科手術用デバイスは、当該分野において周知である。いくつかの器具において、ナイフが、これらのファスナーにより接合された組織を切断するために提供される。これらのファスナーは代表的に、外科手術用ステープルの形態であるが、二部品のポリマーファスナーもまた利用され得る。
【0003】
この目的のための器具は、2つの細長部材を備え、これらの部材はそれぞれ、組織を捕捉またはクランプするために使用される。代表的に、これらの部材のうちの一方は、少なくとも2列に横に並んで整列した複数のステープルを収容するステープルカートリッジを備え、一方で、他方の部材は、これらのステープルがこのステープルカートリッジから駆動されるとステープルレッグを形成するための表面を規定する、アンビルを有する。一般に、ステープル留め操作は、このステープルカートリッジを通って長手軸方向に移動するカム棒によって行われ、これらのカム棒は、ステープルプッシャーに作用してこれらのステープルをこのステープルカートリッジから連続的に排出する。ナイフは、これらのステープル列の間を移動して、ステープル留めされた組織を、これらのステープル列の間で長手軸方向に切断および/または切開し得る。
【0004】
内視鏡手順または腹腔鏡手順において、外科手術は、小さい切開を通して、または皮膚の小さい入口創傷もしくは開口部に挿入された狭いカニューレを通して、行われる。内視鏡および/または腹腔鏡外科手術手順の特殊な必要性を満たす目的で、内視鏡外科手術用ステープル留めデバイスが開発されている。
【0005】
現在の内視鏡用ステープル留めデバイスは、単回使用装填ユニット(「SULU」)、または単回使用もしくは単回発射構成要素として構成された使い捨てステープルカートリッジと一緒に作動するように構成されている。従って、通常の手術中に、外科医は、1回の内視鏡外科手術手順を実施するために、数個のSULUまたはカートリッジを利用する必要があり得る(例えば、複数回の発射が必要とされる場合)。各連続した発射のために、外科医は、使用済み構成要素を新しい構成要素と交換する目的で、ステープル留めデバイスを最初の外科手術部位から取り除かなければならない。1回の手順の経過中にステープル留めデバイスを繰り返し取り除き、そして手で再装填することは、この内視鏡外科手術手順に付随する時間、複雑さおよび全体的な費用を増大させる。
【0006】
従って、複数回の発射のために構成され、従って引き続く発射のためのデバイスを手で再装填する目的でデバイスを内部外科手術部位から取り除く必要性を除いた、外科手術用ステープル留めデバイスおよび対応する装填ユニットを提供することが有利である。
【発明の概要】
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、例えば、以下を提供する:
(項目1)
ステープル形成凹部を規定するアンビルアセンブリ;ならびに
カートリッジアセンブリであって、該アンビルアセンブリおよび該カートリッジアセンブリのうちの少なくとも一方は、他方に対して開位置とクランプ位置との間で旋回可能であり、該カートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを備え、該第一の複数のステープルは最初、該カートリッジアセンブリからの排出のために、該アンビルアセンブリの該ステープル形成凹部と整列して位置し、該第二の複数のステープルは、該アンビルアセンブリの該ステープル形成凹部と整列しない第一の位置から、該カートリッジアセンブリからの引き続く排出のために該ステープル形成凹部と整列した第二の位置へと移動可能であるように、該カートリッジアセンブリ内に支持されている、カートリッジアセンブリ、
を備える、外科手術用ステープラー。
(項目2)
前記第一の複数のステープルは、前記カートリッジアセンブリからの該第一の複数のステープルの排出前に、第一の複数のコンベヤリンク内に収容されており、そして前記第二の複数のステープルは、該カートリッジアセンブリからの該第二の複数のステープルの排出前に、第二の複数のコンベヤリンク内に収容されている、上記項目に記載のステープラー。
(項目3)
前記第一の複数のコンベヤリンクおよび前記第二の複数のコンベヤリンクが、1つのコンベヤ上に支持されており、該コンベヤは、前記第二の複数のステープルを前記第一の位置から前記第二の位置へと回転させるように回転可能である、上記項目のうちのいずれかに記載のステープラー。
(項目4)
前記第一の複数のコンベヤリンクは最初、前記コンベヤの上部組織接触部分を規定し、前記第二の複数のコンベヤリンクは最初、該コンベヤの上部近位部分を規定し、そして第三の複数のコンベヤリンクは最初、該コンベヤの下部遠位部分を規定する、上記項目のうちのいずれかに記載のステープラー。
(項目5)
最初に前記第三の複数のコンベヤリンク内に配置される複数のプッシャーをさらに備え、該複数のプッシャーは、前記第一の複数のステープルを前記カートリッジアセンブリから排出するために、該第三の複数のコンベヤリンク内から前記第一の複数のコンベヤリンク内の位置へと移動可能である、上記項目のうちのいずれかに記載のステープラー。
(項目6)
前記第二の複数のステープルが前記第二の位置へと移動する際に、前記第一の複数のコンベヤリンクは、前記コンベヤの前記下部遠位部分を規定するように位置し、そして前記第二の複数のコンベヤリンクは、該コンベヤの前記上部組織接触部分を規定するように位置する、上記項目のうちのいずれかに記載のステープラー。
(項目7)
前記第二の複数のステープルが前記第二の位置にある際に、前記複数のプッシャーは、前記第二の複数のステープルを前記カートリッジアセンブリから排出するために、前記第一の複数のコンベヤリンク内から前記第二の複数のコンベヤリンク内へと移動可能であるように配置される、上記項目のうちのいずれかに記載のステープラー。
(項目8)
前記カートリッジアセンブリを通って選択的に並進可能な少なくとも1つのカム棒をさらに備え、該少なくとも1つのカム棒は、該少なくとも1つのカム棒が該カートリッジアセンブリを通って並進する際に、前記アンビルアセンブリの前記ステープル形成凹部と整列して位置する前記ステープルを該カートリッジアセンブリから排出するように構成されている、上記項目のうちのいずれかに記載のステープラー。
(項目9)
前記カートリッジアセンブリを通って選択的に並進可能な少なくとも1つの再装填棒をさらに備え、該少なくとも1つの再装填棒は、該少なくとも1つの再装填棒が該カートリッジアセンブリを通って並進する際に、前記第一の位置から前記第二の位置への前記第二の複数のステープルの移動を起こすように構成されている、上記項目のうちのいずれかに記載のステープラー。
(項目10)
発射および再装填アセンブリをさらに備え、該発射および再装填アセンブリは、発射モードと再装填モードとの間で並進可能であり、該発射モードは、前記アンビルアセンブリの前記ステープル形成凹部と整列した位置にある前記ステープルを排出するためのモードであり、そして該再装填モードは、前記第二の複数のステープルを前記第一の位置から前記第二の位置へと回転させるためのモードである、上記項目のうちのいずれかに記載のステープラー。
(項目11)
前記発射および再装填アセンブリは、該発射および再装填アセンブリの完全な前進および後退に応答して、前記発射モードと前記再装填モードとの間で交互に並進する、上記項目のうちのいずれかに記載のステープラー。
(項目12)
アンビルアセンブリ;
カートリッジアセンブリであって、該アンビルアセンブリおよび該カートリッジアセンブリのうちの少なくとも一方は、他方に対して開位置とクランプ位置との間で旋回可能であり、該カートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを収容する、カートリッジアセンブリ;
該第一の複数のステープルを該カートリッジアセンブリから排出するために、該カートリッジアセンブリを通って並進可能である駆動棒;
該カートリッジアセンブリ内の該第二の複数のステープルを該カートリッジアセンブリからの引き続く排出のための位置へと移動させるために、該駆動棒とは独立して該カートリッジアセンブリを通って並進可能である少なくとも1つの再装填棒;ならびに
結合器を備える発射および再装填アセンブリであって、該発射および再装填アセンブリは、発射モードと再装填モードとの間で並進可能であり、該発射および再装填アセンブリが該発射モードにある場合、該結合器は該駆動棒と係合し、そして該発射および再装填アセンブリが該再装填モードにある場合、該結合器は該少なくとも1つの再装填棒と係合する、発射および再装填アセンブリ、
を備える、外科手術用ステープラー。
(項目13)
前記発射モードでの前記結合器の並進は、前記駆動棒を前進させて、前記第一の複数のステープルを前記カートリッジアセンブリから排出する、上記項目のうちのいずれかに記載のステープラー。
(項目14)
前記再装填モードでの前記結合器の並進は、前記少なくとも1つの再装填棒を前進させて、前記カートリッジアセンブリ内の前記第二の複数のステープルを、該カートリッジアセンブリからの引き続く排出のための位置へと移動させる、上記項目のうちのいずれかに記載のステープラー。
(項目15)
前記結合器が前記再装填モードで並進して前記第二の複数のステープルを引き続く排出のための位置へと移動させた後の、前記発射モードでの該結合器の並進は、該第二の複数のステープルを前記カートリッジアセンブリから排出する、上記項目のうちのいずれかに記載のステープラー。
(項目16)
可動ハンドルを備えるハンドルアセンブリをさらに備え、該可動ハンドルは、前記結合器を並進させるために、非圧縮位置から圧縮位置へと移動可能である、上記項目のうちのいずれかに記載のステープラー。
(項目17)
前記発射および再装填アセンブリの前記発射モードにおいて、前記可動ハンドルは、前記第一の複数のステープルを前記カートリッジアセンブリから排出するために、前記非圧縮位置から前記圧縮位置へと移動可能である、上記項目のうちのいずれかに記載のステープラー。
(項目18)
前記発射および再装填アセンブリの前記再装填モードにおいて、前記可動ハンドルは、前記カートリッジアセンブリ内の前記第二の複数のステープルを該カートリッジアセンブリからの引き続く排出のための位置へと移動させるために、前記非圧縮位置から前記圧縮位置へと移動可能である、上記項目のうちのいずれかに記載のステープラー。
(項目19)
前記可動ハンドルの、前記非圧縮位置から前記圧縮位置へ、そして該非圧縮位置へと戻る動きは、前記発射および再装填アセンブリを前記発射モードと前記再装填モードとの間で並進させる、上記項目のうちのいずれかに記載のステープラー。
(項目20)
前記発射および再装填アセンブリは、ロックリングをさらに備え、該ロックリングは、該発射および再装填アセンブリが前記発射モードにある場合に、前記少なくとも1つの再装填棒の並進を妨げ、そして該発射および再装填アセンブリが前記再装填モードにある場合に、前記駆動棒の並進を妨げるように構成されている、上記項目のうちのいずれかに記載のステープラー。
【0008】
(摘要)
外科手術用ステープラーは、アンビルアセンブリおよびカートリッジアセンブリを備える。このアンビルアセンブリは、ステープル形成凹部を規定する。このアンビルアセンブリおよびこのカートリッジアセンブリのうちの一方または両方は、開位置とクランプ位置との間で、互いに対して旋回可能である。このカートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを備える。この第一の複数のステープルは最初、このカートリッジアセンブリからの排出のために、このアンビルアセンブリのステープル形成凹部と整列した位置にある。この第二の複数のステープルは、このアンビルアセンブリのステープル形成凹部と整列しない第一の位置から、このカートリッジアセンブリからの引き続く排出のためにこれらのステープル形成凹部と整列した第二の位置へと移動可能であるように、このカートリッジアセンブリ内に支持されている。
【0009】
(要旨)
本開示の1つの実施形態によれば、外科手術用ステープラーが提供される。この外科手術用ステープラーは、ステープル形成凹部を規定するアンビルアセンブリ、およびカートリッジアセンブリを備える。このアンビルアセンブリおよび/またはこのカートリッジアセンブリは、開位置とクランプ位置との間で、互いに対して旋回可能である。このカートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを備える。この第一の複数のステープルは最初、このカートリッジアセンブリからの排出のために、このアンビルアセンブリのステープル形成凹部と整列した位置にある。この第二の複数のステープルは、このアンビルアセンブリのステープル形成凹部と整列しない第一の位置から、このカートリッジアセンブリからの引き続く排出のためにこれらのステープル形成凹部と整列した第二の位置へと移動可能であるように、カートリッジアセンブリ内に支持される。
【0010】
ある実施形態において、この第一の複数のステープルは、このカートリッジアセンブリからの第一の複数のステープルの排出前に、第一の複数のコンベヤリンクに収容され、そしてこの第二の複数のステープルは、このカートリッジアセンブリからの第二の複数のステープルの排出前に、第二の複数のコンベヤリンクに収容される。
【0011】
この第一の複数のコンベヤリンクおよびこの第二の複数のコンベヤリンクは、コンベヤに支持され得る。このような実施形態において、このコンベヤは、第二の複数のステープルを第一の位置から第二の位置へと回転させるために、回転可能である。
【0012】
ある実施形態において、この第一の複数のコンベヤリンクは最初、このコンベヤの上部組織接触部分を規定し、この第二の複数のコンベヤリンクは最初、このコンベヤの上部近位部分を規定し、そして第三の複数のコンベヤリンクは最初、このコンベヤの下部遠位部分を規定する。さらに、複数のプッシャーが最初、この第三の複数のコンベヤリンク内に配置され得る。このような実施形態において、これらのプッシャーは、第一の複数のステープルをカートリッジアセンブリから排出するために、第三の複数のコンベヤリンクから、第一の複数のコンベヤリン内の位置へと移動可能である。第二の複数のステープルが第二の位置まで移動する場合、第一の複数のコンベヤリンクは、このコンベヤの下部遠位部分を規定するように配置され得、そして第二の複数のコンベヤリンクは、このコンベヤの上部組織接触部分を規定するように配置され得る。従って、第二の複数のステープルが第二の位置へと移動する場合、複数のプッシャーは、第二の複数のステープルをカートリッジアセンブリから排出するために、第一の複数のコンベヤリンク内から第二の複数のコンベヤリンク内へと移動可能であるように、配置され得る。
【0013】
1つの実施形態において、1つ以上のカム棒が、このカートリッジアセンブリを通って選択的に並進可能である。このカム棒(単数または複数)は、そのカム棒がカートリッジアセンブリを通って並進する際に、アンビルアセンブリのステープル形成凹部と整列して位置するステープルをカートリッジアセンブリから排出するように構成される。
【0014】
別の実施形態において、1つ以上の再装填棒が、このカートリッジアセンブリを通って選択的に並進可能である。この再装填棒(単数または複数)は、その再装填棒がカートリッジアセンブリを通って並進する際に、第二の複数のステープルの第一の位置から第二の位置への移動を起こすように構成される。
【0015】
発射および再装填アセンブリもまた提供され得る。この発射および再装填アセンブリは、発射モード(アンビルアセンブリのステープル形成凹部と整列して位置するステープルを排出するためのモード)と再装填モード(第二の複数のステープルを第一の位置から第二の位置へと回転させるためのモード)との間で並進可能である。さらに、この発射および再装填アセンブリは、この発射および再装填アセンブリの完全な前進および後退に応答して、発射モードと再装填モードとの間で交互に並進し得る。
【0016】
本開示に従って提供される外科手術用ステープラーの別の実施形態は、アンビルアセンブリ、カートリッジアセンブリ、駆動棒、1つ以上の再装填棒、ならびに発射および再装填アセンブリを備える。このアンビルアセンブリおよび/またはこのカートリッジアセンブリは、開位置とクランプ位置との間で互いに対して旋回可能である。このカートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを備える。この駆動棒は、第一の複数のステープルをカートリッジアセンブリから排出するために、このカートリッジアセンブリを通って並進可能である。この再装填棒(単数または複数)は、カートリッジアセンブリ内の第二の複数のステープルを、このカートリッジアセンブリからの引き続く排出のための位置へと移動させるために、このカートリッジアセンブリを通って並進可能である。この発射および再装填アセンブリは、結合器を備え、そして発射モードと再装填モードとの間で並進可能である。この発射および再装填アセンブリが発射モードにある場合、この結合器は駆動棒に係合し、そしてこの発射および再装填アセンブリが再装填モードにある場合、この結合器は再装填棒に係合する。
【0017】
ある実施形態において、この結合器は、発射モードでのこの結合器の並進が駆動棒を前進させて第一の複数のステープルをカートリッジアセンブリから排出するように、および/または再装填モードでのこの結合器の並進が再装填棒を前進させて、カートリッジアセンブリ内の第二の複数のステープルを、このカートリッジアセンブリからの引き続く排出のための位置へと移動させるように、構成される。この結合器が再装填モードにおいて並進して、第二の複数のステープルを引き続く排出のための位置へと移動させた後の、発射モードでのこの結合器の並進は、第二の複数のステープルをカートリッジアセンブリから排出するように作動可能であり得る。
【0018】
1つの実施形態において、可動ハンドルを備えるハンドルアセンブリが提供される。この可動ハンドルは、結合器を並進させるために、非圧縮位置から圧縮位置へと移動可能である。発射および再装填アセンブリの発射モードにおいて、この可動ハンドルは、第一の複数のステープルをカートリッジアセンブリから排出するために、非圧縮位置から圧縮位置へと移動可能である。発射および再装填アセンブリの再装填モードにおいて、この可動ハンドルは、カートリッジアセンブリ内の第二の複数のステープルを、このカートリッジアセンブリからの引き続く排出のための位置に移動させるために、非圧縮位置から圧縮位置へと移動可能である。さらに、非圧縮位置から圧縮位置へ、そして非圧縮位置へと戻る、可動ハンドルの動きは、発射および再装填アセンブリを発射モードと再装填モードとの間で並進させるように作動可能であり得る。
【0019】
1つの実施形態において、この発射および再装填アセンブリは、ロックリングをさらに備える。このロックリングは、この発射および再装填アセンブリが発射モードにある場合に、再装填棒の並進を妨げ、そしてこの発射および再装填アセンブリが再装填モードにある場合に、駆動棒の並進を妨げるように、構成される。
【0020】
本発明の種々の実施形態が、図面を参照しながら本明細書中に記載される。
【図面の簡単な説明】
【0021】
【図1】図1は、本開示の外科手術用ステープル留め装置の1つの好ましい実施形態の正面斜視図である。
【図2】図2は、SULUがその細長本体から取り外されている、外科手術用ステープル留め装置の背面斜視図である。
【図3】図3は、開位置で示される、SULUの遠位端の正面斜視図である。
【図4】図4は、クランプ位置で示される、SULUの遠位端の正面斜視図である。
【図5】図5は、図3に示される細部領域の拡大図である。
【図6】図6は、図4の切断線6−6に沿って見た横断面図である。
【図7】図7は、部品を分離したSULUの正面斜視図である。
【図8】図8は、図7に示される細部領域の拡大図である。
【図9】図9は、SULUの発射および再装填アセンブリのロックリングの斜視図である。
【図10】図10は、部品を分離して示されるSULUの駆動アセンブリの正面斜視図である。
【図11】図11は、図7に示される細部領域の拡大図である。
【図12】図12は、図7に示される細部領域の拡大図である。
【図13】図13は、SULUの隣接するコンベヤリンクの背面斜視図である。
【図14】図14は、SULUのプッシャーのうちの1つの背面斜視図である。
【図14A】図14Aは、図14のプッシャーの正面斜視図である。
【図15】図15は、図14の切断線15−15に沿って見た断面図である。
【図16】図16は、SULUのコンベヤアセンブリおよび駆動アセンブリの背面斜視図である。
【図17】図17は、図12に示される細部領域の拡大図である。
【図18】図18は、図12に示される細部領域の拡大図である。
【図18A】図18Aは、図12に示される細部領域の拡大図である。
【図19】図19は、SULUのコンベヤアセンブリの平面図である。
【図20】図20は、図19の切断線20−20に沿って見た断面図である。
【図21】図21は、図19の切断線21−21を横切って見た断面図である。
【図22】図22は、図2の切断線22−22に沿って見た断面図である。
【図23】図23は、図22に示される細部領域の拡大図である。
【図24】図24は、駆動アセンブリの前進中で示されているSULUの長手軸方向断面図である。
【図25】図25は、図24に示される細部領域の拡大図である。
【図26】図26は、SULUの発射および再装填アセンブリの背面斜視図である。
【図27】図27は、発射および再装填アセンブリの近位端の拡大斜視図である。
【図28】図28は、発射および再装填アセンブリの平面図である。
【図29】図29は、図28に示される細部領域の拡大図である。
【図30】図30は、図27の切断線30−30に沿って見た断面図である。
【図31】図31は、図26の切断線31−31に沿って見た断面図である。
【図32】図32は、発射および再装填アセンブリの背面斜視図である。
【図33】図33は、ハウジングの一部分が除かれて内部構成要素を示しており、可動ハンドルが元の位置にある、ステープラーのハンドルアセンブリの斜視図である。
【図34】図34は、ステープラーのシャフトアセンブリの正面斜視図である。
【図35】図35は、シャフトアセンブリの背面斜視図である。
【図36】図36は、部品を分離して示される、ステープラーのハンドルアセンブリの斜視図である。
【図37】図37は、シャフトアセンブリのSULU解放リンクの斜視図である。
【図38】図38は、図37に示される細部領域の拡大図である。
【図39】図39は、ハンドルアセンブリの歯付きラックの斜視図である。
【図40】図40は、図39の切断線40−40に沿って見た断面図である。
【図41】図41は、部品を分離して示される、ステープラーの細長本体部分の正面斜視図である。
【図42】図42は、シャフトアセンブリの関節運動アセンブリの拡大斜視図である。
【図43】図43は、関節運動アセンブリのクラッチの側面図である。
【図44】図44は、関節運動アセンブリの上クラッチの底面斜視図である。
【図45】図45は、元の位置で示され、SULUが存在しない、ステープラーの長手軸方向断面図である。
【図46】図46は、図45に示される細部領域の拡大図である。
【図47】図47は、図45に示される細部領域の拡大図である。
【図48】図48は、図45に示される細部領域の拡大図である。
【図49】図49は、SULUが存在しないステープラーの正面斜視図である。
【図50】図50は、ステープラーの細長本体の近位端の長手軸方向断面図である。
【図51】図51は、SULUの近位端およびステープラーの細長本体の側面図であり、このSULUおよびこの細長本体は、互いから脱係合している。
【図52】図52は、脱係合位置で示される、細長本体の遠位端の正面斜視図である。
【図53】図53は、係合位置で示される、細長本体の遠位端の正面斜視図である。
【図54】図54は、係合位置で示される、細長本体の遠位端の長手軸方向断面図である。
【図55】図55は、細長本体に挿入されたSULUの近位端の側面図である。
【図56】図56は、細長本体内で係合するように回転するのが示されている、SULUの近位端の側面図である。
【図57】図57は、細長本体内に係合したSULUの近位端の側面図である。
【図58】図58は、部品を分離して示される、ハンドルアセンブリのアクチュエータアセンブリの側面図である。
【図59】図59は、把持具モードにあるアクチュエータアセンブリを図示する、ハンドルアセンブリの一部分の横断面図である。
【図60】図60は、可動ハンドルが圧縮位置にあり、把持具モードにある、ハンドルアセンブリの長手軸方向断面図である。
【図61】図61は、図60に示される細部領域の拡大図である。
【図62】図62は、把持具モードで元の位置に戻る可動ハンドルを図示する長手軸方向断面図である。
【図63】図63は、部分的に発射した位置で示されている、発射および再装填アセンブリの正面斜視図である。
【図64】図64は、第一の位置で示されている、発射および再装填アセンブリのロックリングの横断面図である。
【図65】図65は、部分的に発射した位置で示されている、SULUの長手軸方向断面図である。
【図66】図66は、図65に示される細部領域の拡大図である。
【図67】図67は、発射モードに並進しているアクチュエータアセンブリを図示する、ハンドルアセンブリの斜視図である。
【図68】図68は、可動ハンドルが圧縮位置にあり、そしてアクチュエータアセンブリが発射モードに並進しているのを示す、アクチュエータアセンブリの長手軸方向断面図である。
【図69】図69は、把持具モードから発射モードへと移動するアクチュエータアセンブリを図示する、ハンドルアセンブリの一部分の横断面図である。
【図70】図70は、図68の切断線70−70に沿って見た断面図である。
【図71】図71は、可動ハンドルが圧縮位置にある、発射モードにある起動アセンブリの長手軸方向断面図である。
【図72】図72は、可動ハンドルが圧縮位置から解放された、発射モードにある起動アセンブリの長手軸方向断面図である。
【図73】図73は、可動ハンドルが元の位置に戻っている、発射モードにある起動アセンブリの長手軸方向断面図である。
【図74】図74は、可動ハンドルが圧縮位置にあり、そして歯付きラックが遠位に並進している、発射モードにある起動アセンブリの長手軸方向断面図である。
【図75】図75は、第一のセットのステープルを発射した後のSULUの長手軸方向断面図である。
【図76】図76は、図75に示される細部領域の拡大図である。
【図77】図77は、発射モードで示されている、SULUの発射および再装填アセンブリの平面図である。
【図78】図78は、図77に示される細部領域の拡大図である。
【図79】図79は、発射モードから再装填モードへと並進しているSULUの発射および再装填アセンブリの一部分の拡大図である。
【図80】図80は、図79の切断線80−80に沿って見た断面図である。
【図81】図81は、歯付きラックが近位に後退しているのを示す、ハンドルアセンブリの長手軸方向断面図である。
【図82】図82は、発射モードからさらに再装填モードへと並進している、発射および再装填アセンブリの平面図である。
【図83】図83は、図82に示される細部領域の拡大図である。
【図84】図84は、再装填モードで示されている、発射および再装填アセンブリの一部分の拡大図である。
【図85】図85は、図84の切断線85−85に沿って見た断面図である。
【図86】図86は、第二の位置で示されている、発射および再装填アセンブリのロックリングの横断面図である。
【図87】図87は、SULUの再装填中の、コンベヤアセンブリの一部分および発射および再装填アセンブリの一部分の上面斜視図である。
【図88】図88は、SULUの再装填中の、コンベヤアセンブリの一部分および発射および再装填アセンブリの一部分の長手軸方向断面図である。
【図89】図89は、コンベヤアセンブリが回転してSULUを再装填しているのを示す概略図である。
【図90】図90は、再装填モードから発射モードへと部分的に回転したところが示されている、発射および再装填アセンブリの横断面図である。
【図91】図91は、発射モードで示されている、発射および再装填アセンブリの横断面図である。
【発明を実施するための形態】
【0022】
(詳細な説明)
本開示の実施形態が、ここで図面を参照しながら詳細に記載される。図面において、同じ参照番号は、類似の要素または同一の要素を見分ける役に立つ。本明細書中で使用される場合、用語「遠位」とは、記載されている装置の、使用者から遠い方の部分をいい、一方で、用語「近位」とは、記載されている装置の、使用者に近い方の部分をいう。
【0023】
ここで図1〜図2を参照すると、本開示に従って提供される内視鏡外科手術用ステープラーが、一般に参照番号10により識別されて示されている。ステープラー10は一般に、ハンドルアセンブリ12、回転ノブ14、関節運動レバー16、およびSULU 500に係合するように構成された細長本体部分18を備える。これらの構成要素の各々が、以下に詳細に記載される。ステープラー10の1つの実施形態が図示され、本明細書中に記載されるが、SULU 500は、他の任意の適切な外科手術用ステープル留め装置と一緒に使用するために構成され得ることが想定される。
【0024】
図2〜図32を参照しながら、SULU 500を説明する。最初に図2〜図4を参照すると、SULU 500は一般に、近位本体部分502およびツールアセンブリ504を備える。近位本体部分502は、以下に記載されるように、ステープラー10の細長本体部分18の遠位端に取り外し可能に取り付け可能であり、そしてツールアセンブリ504は、近位本体部分502の遠位端から延びる。ツールアセンブリ504は、アンビルアセンブリ506およびカートリッジアセンブリ514を備える。アンビルアセンブリ506は、以下でより詳細に議論されるように、カートリッジアセンブリ514に対して、開位置または非クランプ位置(図3)から、閉位置またはクランプ位置(図4)へと旋回する。
【0025】
図3〜図7を参照すると、アンビルアセンブリ506は、アンビルプレート508を支持するアンビルカバー507を備える。アンビルプレート508は、複数のステープル形成凹部513を備え得、これらのステープル形成凹部は、ツールアセンブリ504がクランプ位置(図1)にある場合に、ステープル形成凹部513が、カートリッジアセンブリ514に形成されたステープルスロット568(図13)に並置して整列して位置するように構成される。従って、各ステープル「S」(図20〜図21)がカートリッジアセンブリ514のステープルスロット568(図13)のうちの1つから排出されると、各ステープル「S」(図20〜図21)は、アンビルアセンブリ506とカートリッジアセンブリ514との間に把持された組織を通って前進し、そしてステープル形成凹部513のうちの1つに入り、その結果、ステープル「S」(図20〜図21)が組織の周りで形成される。アンビルプレート508は、アンビルカバー507の下側に固定されて、プレート508とカバー507との間にチャネル509を規定する(図6)。チャネル509は、以下に記載されるように、ほぼ「T」字型の構成を規定し、これは、動的クランプ留め部材593の上梁593aをこのチャネルに通して受容し、そして案内するように適合される。アンビルカバー507は、間隔を空けた一対のフランジ511、512を有する近位部分510を備え、これらのフランジは、カートリッジアセンブリ514の両側でカートリッジアセンブリ514に対して旋回可能に結合され、従って、アンビルアセンブリ506がカートリッジアセンブリ514に対して開位置(図3)とクランプ位置(図4)との間で旋回することを可能にする。あるいは、カートリッジアセンブリ514がアンビルアセンブリ506に対して旋回可能に設置されてもよい。
【0026】
図6〜図7および図12〜図21を参照すると、カートリッジアセンブリ514は枠部材516を備え、この枠部材は、コンベヤアセンブリ530、駆動アセンブリ590、ならびに発射および再装填アセンブリ600を回転可能に支持する。枠部材516は、ほぼU字型の構成を規定し、基部517および間隔を空けた1対の側壁518を有し、これらの側壁の間に細長チャネル519を規定する。細長チャネル519は、コンベヤアセンブリ530を受容するように構成される。より具体的には、枠部材516は、側壁518を通ってその近位端521に規定される1対の対向する近位開口部分522(コンベヤアセンブリ530の近位端を回転可能に支持するように構成される)、および側壁518を通ってその遠位端523に規定される1対の遠位開口部分524(コンベヤアセンブリ530の遠位端を回転可能に支持するように構成される)を備える。
【0027】
コンベヤアセンブリ530は一般に、中心支持部材531、ならびに中心支持部材531の各側に配置された第一のコンベヤ540および第二のコンベヤ550を備える。中心支持部材531は、この中心支持部材を通る細長チャネル532(図6)を規定し、この細長チャネルは、アンビルアセンブリ506とカートリッジアセンブリ514との間に把持された組織を切断するために、動的クランプ留め部材593を受容してその並進を案内するように構成される。中心支持部材531は、外向きにフランジの付いた下部分535をさらに備え、これは、図6に最もよく示されるように、枠部材516の基部517に規定されたスロットを通って延びて、中心支持部材531と枠部材516とを互いに固定する。コンベヤ540、550の各々は、1対のコンベヤ鎖541、551を備え、これらのコンベヤ鎖は、ループした構成を規定する(図12)。より具体的には、各コンベヤ540、550の対のコンベヤ鎖541、551は、それぞれ、その近位端で近位スプロケット542、552の周りに、そしてその遠位端で遠位スプロケット544、554の周りに配置される。近位スプロケット542、552は、枠部材516の側壁518に規定された対向する近位開口部分522内に回転可能に支持される。他方で、遠位スプロケット544、554は、枠部材516の側壁518に規定された対向する遠位開口部分524内、および中心支持部材531の遠位ディスク533に規定された開口部分534内に、回転可能に支持される。コンベヤアセンブリ530の第一のコンベヤ540および第二のコンベヤ550は、互いに実質的に類似であるので、不必要な冗長性を回避するために、第一のコンベヤ540のみが以下で説明される。
【0028】
図6〜図7および図12〜図21の参照を続けると、コンベヤ540のコンベヤ鎖541は、互いに協働して、複数のコンベヤリンク566を、コンベヤ鎖541のかなりの部分に沿って支持する。コンベヤリンク566は、図13に最もよく示されるように、互いに相補的に形成され、その結果、隣接するコンベヤリンク566が互いに嵌合して、コンベヤ540の上部組織接触表面570をその上部分で形成し、そしてコンベヤ540の下部分572で形成する(図18、図18Aおよび図19を参照のこと)。同様に、コンベヤリンク566は互いに嵌合して、第二のコンベヤ550の上部組織接触表面556をその上部分で形成する。第一のコンベヤ540および第二のコンベヤ550のそれぞれの上部組織接触表面570、556は、チャネル574の両側に配置され(図3を参照のこと)、そして一緒になって、カートリッジアセンブリ514の上部組織接触表面を形成する。コンベヤリンク566もまた協働して、コンベヤ540、550のそれぞれの上部組織接触表面570、556に沿って長手軸方向に延びる、ステープルスロット568の3つの直線状の列(3列より多いかまたは少ないステープルスロットも想定される)を形成する。ステープル「S」は、ステープルスロット568の各々に収容される。さらに、各ステープルスロット568は、プッシャー580の一部分を受容して、ステープル「S」をカートリッジアセンブリ514から発射するように、すなわち、排出するように構成される。より具体的には、プッシャー580は、図14、図14A、図16および図19〜図21に示されるように、各々が、ステープル「S」(直線状の列の各々からの1つ)のバックスパンに各々が係合する3つのブロック582を規定し、その結果、起動の際に、カム棒595のカム楔596がプッシャー580を上方に、ステープルスロット568内へと推進し、これは次に、ステープル「S」を下方に推進して、ステープル「S」をカートリッジアセンブリ514から排出する。ステープル「S」、プッシャー580、およびカム棒595は、以下に詳細に記載される。
【0029】
1セットのコンベヤリンク566は、図13、図18、図18Aおよび図19に最もよく示されるように、そして上記のように、互いに嵌合して、コンベヤ540の上部組織接触表面570(および同様に、コンベヤ550の上部組織接触表面556)を形成し、一方で、コンベヤリンク566の残りは、コンベヤ鎖541に沿った他の位置(例えば、上部組織接触表面570の近く、下部分572、近位スプロケット542の周囲、遠位スプロケット544の周囲など)に配置される。コンベヤリンク566は、枠部材516に沿って、そして近位スプロケット542および遠位スプロケット544の周りで、回転可能である。より具体的には、コンベヤリンク566は、コンベヤ540のコンベヤ鎖541により形成されるループに沿って、コンベヤ540の上部分(ここで、コンベヤリンク566が上部組織接触表面570を規定している)の位置から、遠位スプロケット544の周りで反時計回りに、下部分572に沿って近位に、近位スプロケット542の周りで反時計回りに、上部組織接触表面570から遠位に、などで回転する。以下により詳細に記載されるように、このような構成は、先のセットのコンベヤリンク566のステープル「S」が一旦発射されると、新たなセットのコンベヤリンク566(上部組織接触表面570の近くに位置するコンベヤリンク566)がアンビルプレート508(図6)のステープル形成凹部513(図6)と並置して整列する位置まで移動して、コンベヤ540の上部組織接触表面570を規定することを可能にする。新たなコンベヤリンク566が適切にある状態で、ステープラー10は、第二のセットのステープル「S」をカートリッジアセンブリ514から排出するために発射され得る。換言すれば、複数のセットのステープル「S」が、各発射操作のために新たなSULUを必要とせずに、SULU 500から発射され得る。複数セットのステープル「S」を発射する際のSULU 500の作動は、本明細書中以下により詳細に記載される。
【0030】
図14、図14A、図15、図19、図20、図21および図25をさらに参照すると、各プッシャー580は、上記のように、カートリッジアセンブリ514からのステープル「S」の排出を容易にするために、発射中に、ステープル「S」のうちの1つ(各直線状の列の各々から1つ)のバックスパンに各々が係合する、3つのブロック582(より多いかまたはより少ないブロックも想定される)を規定する。プッシャー580は、コンベヤリンク566(コンベヤ540の上部組織接触表面570を形成する)とコンベヤリンク566(上部組織接触表面570の真下でコンベヤ540の下部分572に配置される)との間に配置され、そして二方向プッシャー580として構成される。最初、図25に示されるように、プッシャー580は、コンベヤ540の下部分572のコンベヤリンク566に規定されたスロット568内に配置され、その結果、起動の際に、カム棒595のカム楔596がプッシャー580の角度の付いた表面584に接触して、プッシャー580を上方に、下部分572のコンベヤリンク566のスロット568から、コンベヤ540の上部組織接触表面570を形成するコンベヤリンク566に規定されたスロット568内へと推進して、これらのスロット568からステープル「S」を排出する。プッシャー580は、図15に示されるように、その第一の端部585に溝586を規定し、これらの溝586は、ステープル「S」のバックスパンを受容して、コンベヤリンク566からのステープル「S」の排出を案内するように構成される。
【0031】
図89もまた参照して、一旦、以下に記載されるように、最初のセットのステープル「S」が排出されると、コンベヤ540が回転し、その結果、コンベヤリンク566(先に発射されたステープルを収容していたが、今はそのスロット568内に配置されたプッシャー580を収容している)が遠位スプロケット544の周りでコンベヤ540の下部分572へと回転し、この間に、新たなセットのコンベヤリンク566(未発射のステープル「S」を収容する)がコンベヤ540に沿って遠位に並進して、上部組織接触表面570、またはコンベヤ540の表面570の一部分を形成する。この位置で、プッシャー580がコンベヤ540の下部分572のコンベヤリンク566内に配置される場合、プッシャー580は、上下逆に配向する(遠位スプロケット544の周りでのコンベヤリンク566の回転に起因する)。従って、プッシャー580はまた、その第二の端部587に溝588を規定し、これらの溝は、ステープル「S」のバックスパンを受容して、ステープル「S」の排出を案内するように構成される。プッシャー580はまた、角度の付いた表面589を備え、これらの表面は、この上下逆の配向にある場合に、カム棒595のカム楔596に沿ってカム作用するように構成される。すなわち、プッシャー580は、プッシャー580の配向とは無関係に、コンベヤリンク566からステープル「S」を排出するように作動可能である。
【0032】
ここで図6、図7、図10、図11、図12および図16を参照すると、駆動アセンブリ590は、二叉の近位端592、および動的クランプ留め部材593に係合する遠位端594を有する、駆動棒591を備える。駆動アセンブリ590は、その両側で駆動棒591に結合された、1対のカム棒595をさらに備える。カム棒595はそれぞれ、カム楔596を規定する角度の付いた遠位端表面を備え、このカム楔596は、駆動棒591の遠位への並進の際に、プッシャー580の、相補的な形状の角度の付いた表面584、589に(プッシャー580の配向に依存して)スライド可能に接触して(図14〜図15を参照のこと)、プッシャー580を上方に推進して、ステープル「S」をコンベヤリンク566のスロット568から排出するように構成される。タブ597(図10)が、カム棒595の各々に規定されたスロット598を通し、駆動棒591に規定されたスロット599を通して受容されて、カム棒595および駆動棒591を、互いに対して間隔を空けて固定する。
【0033】
動的クランプ留め部材593は、上記のように、そして図6〜図7および図10〜図11に最もよく示されるように、駆動棒591の遠位端594に配置される。動的クランプ留め部材593は、直立部材593cにより相互接続された、上梁593aおよび下梁593bを備える。直立部材593cは、切断刃593dを規定して、組織を通しての動的クランプ留め部材593の前進を容易にする。以下により詳細に記載されるような、駆動アセンブリ590の最初の起動の際に、動的クランプ留め部材593の上梁593aは、アンビルアセンブリ506のプレート508とカバー507との間に規定されたT字型チャネル509の上の横向き部分内に前進し、遠位梁593bは、枠部材516および中心支持部材531の外側に沿って並進し、そして直立部材593cは、アンビルアセンブリ506のT字型チャネル509の直立部分および中心支持部材531の細長チャネル532内へと並進して(T字型チャネル509の直立部分および中心支持部材531の細長チャネル532は、互いに協働して、チャネル574(図3)を規定する)、アンビルアセンブリ506をカートリッジアセンブリ514に対して、クランプ位置(図4)まで旋回させる。しかし、この最初の起動、すなわち、クランプ留め行程は、カム棒595を並進させてプッシャー580と接触させることなく、アンビルアセンブリ506をカートリッジアセンブリ514に対してクランプ位置(図4)まで旋回させるために充分な距離のみ、動的クランプ留め部材593を前進させる。従って、最初の起動の際に、カム棒595はプッシャー580の近位に残り、従って、ステープル「S」の発射も組織の切断も行われない。
【0034】
ハンドルアセンブリ12の引き続く起動(すなわち、発射行程)の際に(ハンドルアセンブリ12は発射モードに配置されている)、以下により詳細に記載されるように、動的クランプ留め部材593は、SULU 500を通って次第にさらに前進し、その結果、カム棒595が推進されてプッシャー580と接触して、ステープル「S」を発射させ、そして動的クランプ留め部材593が組織を通って前進して、カートリッジアセンブリ514のコンベヤ540と550との間の組織を切断する。
【0035】
図7〜図10、および図25〜図32を参照すると、発射および再装填アセンブリ600は一般に、横方向に対向する1対の再装填棒660、670、非回転ドライバ610、回転結合器620、近位カム630、遠位カム640、およびロックリング650を備える。発射および再装填アセンブリ600は、以下を見ると明らかになるように、発射モード(このモードにおいて、ステープル「S」をカートリッジアセンブリ514から排出するため、およびアンビルアセンブリ506とカートリッジアセンブリ514との間に把持された組織を切断するために、駆動棒591が選択的に前進可能である)と再装填モード(このモードにおいて、コンベヤリンク566を推進してコンベヤ540、550の周りで回転させるために、再装填棒660、670が遠位に前進可能であり、その結果、新たなセットのコンベヤリンク566が、カートリッジアセンブリ514のコンベヤ540、550のそれぞれの上部組織接触表面570、556を形成するように位置し、一方で、発射されたステープルを収容していたコンベヤリンク566は、遠位スプロケット544、554の周りでカートリッジアセンブリ514の下部分へと回転する)との間で交互に並進するように構成される。この構成に起因して、理解され得るように、そして以下により詳細に記載されるように、各完全な発射操作の後に、引き続く発射のためにSULU 500を再装填する、再装填操作が行われる。
【0036】
駆動棒591の近位端592は、上記のように、二叉の構成を規定する。より具体的には、駆動棒591の近位端592は、上アーム681および下アーム682を備え、これらのアームは、互いから間隔を空けており、そして駆動棒591から近位に延びて、駆動棒591の近位端592を形成する。上アーム681および下アーム682の各々は、それらの自由端685、686において、対向する切り抜き部683、684をそれぞれ規定する。対向する切り抜き部683、684は、発射および再装填アセンブリ600が発射モードで配置される場合に、回転結合器620のブロック突出部622を受容し、その結果、回転結合器620の前進は、駆動棒591の類似の前進を起こす。再装填モードにおいて、切り抜き部683、684は、回転結合器620のブロック突出部622に対してずれており、その結果、回転結合器620はもはや、駆動棒591の上アーム681および下アーム682に結合されず、従って、回転結合器620の並進は、駆動棒591の対応する並進を起こさない。さらに、上アーム681および下アーム682は、発射および再装填アセンブリ600の非回転ドライバ610に規定された、垂直方向に対向するスロット612、613内にそれぞれスライド可能に支持されて(図26〜図27を参照のこと)、発射および再装填アセンブリ600が発射モードで作動する場合に、駆動棒591の並進を案内する。
【0037】
図7〜図10、および図25〜図32を引き続き参照すると、横方向に対向する再装填棒660、670は、駆動棒691のアーム681、682と同様に、各々が、切り抜き部664、674をそれぞれ規定する近位端662、672を備える。横方向に対向する再装填棒660、670は、駆動棒591の上アーム681および下アーム682に対して90°ずれており、そして非回転ドライバ610に規定された横方向に対向するスロット614、615内にそれぞれスライド可能に支持されて、発射および再装填アセンブリ600が再装填モードで作動している場合に、再装填棒660、670の並進を案内する。さらに、再装填棒660、670の対向する切り抜き部664、674は、発射および再装填アセンブリ600が再装填モードで作動している場合に、回転結合器620のブロック突出部622を受容するように構成されており、その結果、回転結合器620の並進は、再装填棒660、670の類似の前進を起こす。発射モードにおいて、切り抜き部664、674は、回転結合器620のブロック突出部622に対してずれており、その結果、回転結合器620はもはや再装填棒660、670に結合せず、従って、回転結合器620の並進は、再装填棒660、670の対応する並進を起こさない。
【0038】
回転結合器620は、非回転ドライバ610の近位延長部616の周りに回転可能に配置され、そして上記のように、発射モードにおいては駆動棒591のアーム681、682に係合し、そして再装填モードにおいては再装填棒660、670に係合する。より具体的には、回転結合器620の本体部分624は、その外周に配置された間隔を空けた複数のブロック突出部622を備える。ブロック突出部622は、互いから間隔を空けて、その間にギャップ626を規定する。以下に記載されるように、回転結合器620は、非回転ドライバ610の近位延長部616の周りで、駆動棒591および再装填棒660、670に対して回転可能であり、発射および再装填アセンブリ600を発射モードと再装填モードとの間で並進させる。より具体的には、発射モードにおいて、回転結合器620は、駆動棒591のアーム681、682の対向する切り抜き部683、684がブロック突出部622を受容し、同時に再装填棒660、670がギャップ626内に配置されるように、配向される。他方で、再装填モードにおいては、回転結合器620は、再装填棒660、670の対向する切り抜き部664、674がブロック突出部622を受容し、同時に駆動棒591のアーム681、682がギャップ626内に配置されるように、回転される。
【0039】
回転結合器620は、歯付き近位部分627および歯付き遠位部分629をさらに備える。歯付き近位部分627は、複数の歯を備え、各歯が一般に、直角三角形の構成を規定する。換言すれば、各歯は、長手軸方向表面および角度の付いた表面を規定する。これらの歯は、互いに対して同様に配向されて、歯付き近位部分627の外周で連続的な歯付き構成を規定する。歯付き遠位部分629もまた、複数の歯を備え、各歯が一般に、直角三角形の構成を規定し、そして互いに対して同様に配向される。あるいは、異なる歯の構成が想定される。
【0040】
図7〜図10、および図25〜図32をさらに参照すると、近位カム630および遠位カム640は、発射および再装填アセンブリ600のそれぞれ近位端および遠位端において、静止して配置される。近位カム630は、複数の歯を備える歯付き遠位部分632を備え、これらの歯は、回転結合器620の歯付き近位部分627の歯と相補的な形状にされる。近位カム630の歯は最初、回転結合器620の歯付き近位部分627の歯と整列する。近位カム630は、付勢部材634によって遠位に付勢される。他方で遠位カム640は、複数の歯を備える歯付き近位部分642を備え、これらの歯は、回転結合器620の歯付き遠位部分629の歯と相補的な形状にされる。最初、遠位カム640の歯は、回転結合器620の歯付き遠位部分629の歯に対してずれている。
【0041】
発射および再装填アセンブリ600の完全な前進および後退の際に、近位カム630および遠位カム640は協働して、回転結合器620を回転させ、その結果、発射および再装填アセンブリ600は、発射および再装填アセンブリ600の完全な前進および後退の各々の後に、発射モードと再装填モードとの間を並進する。より具体的には、発射および再装填アセンブリ600の完全な前進の際に、回転結合器620が遠位に推進され、その結果、回転結合器620の歯付き遠位部分629が最終的に、遠位カム640の歯付き近位部分642に接触する。遠位カム640の歯および回転結合器620の歯付き遠位部分629の歯の角度の付いた構成に起因して、回転結合器620の歯付き遠位部分629が推進されて遠位カム640の歯付き近位部分642と接触すると、回転結合器620は遠位カム640に対して回転し、その結果、それぞれの歯が互いに対して相補的にずれ、従って、回転結合器620と遠位カム640とが互いに嵌合することを可能にする。同様に、発射および再装填アセンブリ600の完全な後退の際に、回転結合器620は近位に引かれ、その結果、回転結合器620の歯付き近位部分627は最終的に、近位カム630の歯付き遠位部分632に接触する。近位カム630に接触する前であるが遠位カム640に接触して回転されられる前に、回転結合器620の歯付き近位部分627の歯は、上記のような回転結合器620のその元の位置からの回転に起因して、近位カム630の歯と整列する。従って、近位カム630の歯および回転結合器620の歯付き近位部分627の歯の、今は整列した構成に起因して、回転結合器620の歯付き近位部分627が推進されて近位カム630の歯付き遠位部分632と接触すると、回転結合器620は近位カム630に対して回転し、その結果、それぞれの歯が互いに対して相補的にずれ、従って、回転結合器620と近位カム630とが互いに嵌合することを可能にする。
【0042】
図7〜図10、図25〜図32、図78〜図79および図83〜図84を続けて参照すると、発射および再装填アセンブリ600の後退中に近位カム630と接触する際の回転結合器620の回転は、遠位カム640と接触する際の回転結合器620の回転の方向と類似である。実際に、各回転は、発射モードと再装填モードとの間での回転結合器620の部分的な回転に対応する。従って、使用において、発射および再装填アセンブリ600が最初に発射モードにある状態で、発射および再装填アセンブリ600の完全な前進は、駆動棒591が遠位に移動してステープル「S」をSULU 500から排出し、そして動的クランプ留め部材593を前進させてステープル留めされた組織を切断する場合に、起こる。発射行程の最後に達すると、回転結合器620は遠位カム640に接触し、そして発射モードから再装填モードへと部分的に回転させられるが、駆動棒591が回転結合器620から脱係合するほど充分には回転しない。従って、駆動棒591および回転結合器620が依然として係合している状態で、発射および再装填アセンブリ600が後退し得、これによって駆動棒591を後退させ得る。完全に後退すると、回転結合器620は近位カム630に接触し、そしてこの部分的に回転した配向から再装填モードへと回転し、ここで駆動棒591のアーム681、682が回転結合器620から脱係合し、そして再装填棒660、670が回転結合器620と係合する。
【0043】
発射および再装填アセンブリ600の引き続く完全な前進および後退の際に、再装填棒660、670は前進して、新たなセットのコンベヤリンク566を適切な位置に推進し、引き続く発射のために、カートリッジアセンブリ514のコンベヤ540、550のそれぞれの上部組織接触表面570、556を形成する。回転行程の終了時の回転結合器620と遠位カム640との接触は、回転結合器620を回転させて発射モードの方に部分的に戻し、そして後退の際に、回転結合器620と近位カム630との接触は、回転結合器620を回転させて駆動棒591との係合状態に戻し、その結果、発射および再装填アセンブリ600は、引き続く発射のために、発射モードに戻される。
【0044】
ここで図9および図26〜図31を参照すると、ロックリング650は、ロッキング特徴を提供し、このロッキング特徴は、発射および再装填アセンブリ600が発射モードにある場合に再装填棒660、670の前進を妨げ、そして発射および再装填アセンブリ600が再装填モードにある場合に駆動棒591の前進を妨げる。ロックリング650は、図8に示されるように、中心開口部分651、および対向する2対の移動止め部分652、655を備える。駆動棒591は、対向する1対の中間切り抜き部687、688を備え、これらの中間切り抜き部は、ロックリング650の移動止め部分652に受容されるように構成される。再装填棒660、670は各々が、それぞれ遠位切り抜き部666、676を備え、これらの遠位切り抜き部は、移動止め部分655に受容されるように構成される。
【0045】
各移動止め部分652、655は、それぞれの移動止め部分652、655に隣接するスロット653、656、およびスロット653、656にそれぞれ通じる角度の付いた表面654、657をさらに備える。第一の対の移動止め部分652のスロット653および第二の対の移動止め部分655のスロット656は、ロックリング650の周りで等しく間隔を空けておらず、むしろ、互いに対してずれている。この構成に起因して、以下に記載されるように、駆動棒591がスロット653と整列している場合、再装填棒660、670はスロット656に対してずれており、そして同様に、再装填棒660、670がスロット656と整列している場合、駆動棒591はスロット653に対してずれており、従って、ロックリング650のロッキング特徴を提供する。
【0046】
ロックリング650は、第一の位置(この位置において、駆動棒591は移動止め部分652のスロット653と整列しており、そして再装填棒660、670は移動止め部分655のスロット656に対してずれている)と第二の位置(この位置において、再装填棒660、670は移動止め部分655のスロット656と整列しており、そして駆動棒591は移動止め部分652のスロット653に対してずれている)との間で回転可能である。第一の位置(発射モードに対応する)において、駆動棒591は、駆動棒591とスロット653との整列に起因して、ロックリング650を通って並進することを可能にされ、一方で、再装填棒660、670のそれぞれの遠位切り抜き部666、676は、移動止め部分655の周りに配置され、再装填棒660、670の並進を妨げる。第二の位置(再装填モードに対応する)において、再装填棒660、670は、再装填棒660、670とスロット656との整列に起因して、ロックリング650を通って並進することを可能にされ、一方で、駆動棒591の中間の切り抜き部687、688は、移動止め部分652の周りに配置され、駆動棒591の並進を妨げる。
【0047】
移動止め部分652、655のそれぞれの角度の付いた表面654、657は、第一の位置と第二の位置との間でのロックリング650の回転を容易にする。より具体的には、発射モード中に駆動棒591が遠位に前進すると、駆動棒591が推進されて移動止め部分652の角度の付いた表面654と接触し、ロックリング650を回転させ、従って、駆動棒591がスロット653と整列すること、および再装填棒660、670のそれぞれの遠位切り抜き部666、676が移動止め部分655の周りに配置されることを確実にする。再装填モードにおいて、再装填棒660、670の遠位への前進中に、再装填棒660、670が推進されて移動止め部分655の角度の付いた表面657に接触し、ロックリング650を逆方向に回転させ、従って、再装填棒660、670がスロット656と整列すること、および駆動棒591の中間の切り抜き部687、688が移動止め部分652の周りに配置されることを確実にする。ロックリング650を推進して第一の位置および第二の位置まで回転させる駆動棒591も再装填棒660、670もない場合、付勢部材658および中心合わせプランジャー659が、ロックリング650を中心合わせされた位置に戻す。
【0048】
図33〜図36を、図1と合わせて参照すると、ステープラー10は一般に、上記のように、ハンドルアセンブリ12、回転ノブ14、関節運動レバー16、およびSULU 500に係合するように構成された細長本体部分18を備える。
【0049】
ハンドルアセンブリ12は、以下に記載されるように、アンビルアセンブリ506とカートリッジアセンブリ514との間に組織を把持するように、ステープル「S」のセット(図20〜図21)をSULU 500から発射するように、そして引き続く発射のためにSULU 500に再装填するために、選択的に作動可能である。より具体的には、ハンドルアセンブリ12は、組織をアンビルアセンブリ506とカートリッジアセンブリ514との間に把持するため、および複数のステープル「S」を組織に通して順次発射し、そしてアンビルアセンブリ506とカートリッジアセンブリ514との間に把持された組織を分割するために、把持具モードと発射モードとの間で並進可能である。ハンドルアセンブリ12は一般に、静止ハンドル部分20、トリガまたは可動ハンドル部分22、バレル部分24、および後退ノブ26を備える。アクチュエータボタン28が、ハンドルアセンブリ12を横方向に通り、ハンドルアセンブリ12の両側から外向きに突出する。ハンドルアセンブリ12は、1対のハウジングセクション12aおよび12bから形成され、これらのハウジングセクションは協働して、静止ハンドル部分20およびバレル部分24を形成する。ハウジングセクション12aおよび12bはまた、ハンドルアセンブリ12の内部構成要素を受容するための空洞30を規定する。これらの内部構成要素は、本明細書中以下により詳細に記載される。
【0050】
図33〜図36の参照を続けると、ハンドルアセンブリ12の可動ハンドル22は、ハウジングセクション12aと12bとの間で、旋回部材32の周りで旋回可能に支持される(図33)。付勢部材34は、ハウジング半セクション12aのポスト36aの周りに固定された第一の端部、および可動ハンドル22上に支持されたポスト36bに係合する第二の端部を有して、可動ハンドル22を静止ハンドル20から離れるように非圧縮位置(SULU 500のツールアセンブリ504の開位置または非クランプ位置に対応する)へと付勢する(図1を参照のこと)。
【0051】
起動シャフト38は、ハンドルアセンブリ12のバレル部分24内に支持され、そして歯付きラック40を備える。横方向に延びるウィング44aおよび44bを備えるラック係合フィンガー44を有する駆動つめ42が、可動ハンドル22の一端に、ポスト36bの周りで旋回可能に設置される。付勢部材48が、駆動つめ42の係合フィンガー44を起動シャフト38の歯付きラック40に向けて推進するように、配置される。可動ハンドル22は、駆動つめ42の係合フィンガー44を起動シャフト38の歯付きラック40と接触させるように動かして、起動シャフト38を遠位方向に直線状に前進させるように、旋回可能である。起動シャフト38の前端は、制御棒52(図41)の近位端50を回転可能に受容するための凹部39(図39)を備え、その結果、起動シャフト38の直線状の前進が、制御棒52の対応する直線状の前進を起こし、これが次に、対応して、発射および再装填アセンブリ600の回転結合器620を並進させて、発射および再装填アセンブリ600が発射モードにあるか再装填モードにあるかに依存して、駆動棒591または再装填棒660、670を前進させる(図26、図28を参照のこと)。
【0052】
垂直つめ54が、ハンドルアセンブリ12内に移動可能に支持され、そして付勢部材56によって、起動シャフト38の切り抜き部58の方へと付勢される。垂直つめ54は、切り抜き部58および歯付きラック40と係合して、起動シャフト38を長手軸方向に固定された位置に保持するように移動可能である。
【0053】
後退ノブ26(図1を参照のこと)を備える後退機構57が、結合棒60によって、起動シャフト38の近位端に接続される。結合棒60は、後退ノブ26を受容するための右および左の係合部分62aおよび62b、ならびに中心部分62cを備え、この中心部分は、起動シャフト38にその近位端に隣接して形成された1対の長手軸方向スロット64内で並進するような寸法および構成にされる。解放プレート66が起動シャフト38と作動可能に関連し、そして後退ノブ26の操作に応答して、この起動シャフトに対して動くように設置される。間隔を空けた1対のピン68が、起動シャフト38の横面から外向きに延びて、解放プレート66に形成された、対応する1対の角度の付いたカムスロット70に係合する。図81もまた参照すると、後退ノブ26の後方への動きの際に、ピン68が起動シャフト38に対して、そして歯付きラック40に対して、解放プレート66に下方にカム作用し、その結果、解放プレート66の底部が歯付きラック40の下に延びて、垂直つめ54および駆動つめ42の係合フィンガー44を歯付きラック40から脱係合させる。横断スロット72(図36)が、解放プレート66の近位端に形成されて、結合棒60の中心部分62cを収容する。結合棒60は、ばね76(図36)によって遠位に付勢され、このばねは、一端においてコネクタ78を介して結合棒部分60に固定され、そして他端において起動シャフト38のポスト80に固定される。結合棒60を遠位に推進することによって、解放プレート66は、歯付きラック40の上方の位置の方へ推進される。細長スロット74(図1を参照のこと)が、ハンドルアセンブリ12のバレル部分24に規定されて、後退ノブ26が後方に引かれる際に、結合棒60の長手軸方向並進に適応し、起動シャフト38を後退させ、従って、制御棒52(図41)を後方に後退させる。
【0054】
図36および図46を参照すると、ハンドルアセンブリ12は、ハンドルアセンブリ12のバレル部分24内で回転可能に支持された、後退アーム85を備える。ねじりばね87が、図46に見られるように、後退アーム85を反時計回りに回転させるように推進するように配置される。後退アーム85は、起動シャフト38の切り欠き89内に位置する突出部85aを備える。ばね87がアーム85を反時計回りに回転するように推進すると、突出部85aは起動シャフト38に係合して、起動シャフト38をハンドルアセンブリ12内で近位に推進する。
【0055】
図36および図46をなお参照すると、ステープラー10のハンドルアセンブリ12は、把持具顎機構100を備え、この把持具顎機構は、切断リンクアセンブリ102およびアクチュエータアセンブリ104を備える。以下でより詳細に議論されるように、切断リンクアセンブリ102は、ハンドルアセンブリ12が把持具モードにある場合に、垂直つめ54と起動シャフト38との係合を防止して、起動シャフト38の近位および遠位への動きがアンビルアセンブリ506をカートリッジアセンブリ516に対して開位置とクランプ位置との間で動かすことのみを可能にする(駆動アセンブリ590を発射することを可能にしない)ように機能する。アクチュエータアセンブリ104は、ハンドルアセンブリ12が把持具モードにある場合に、可動ハンドル22が非圧縮位置に完全に戻ることを防止して、駆動つめ42が歯付きラック40に係合することを防止する。これを行うことによって、可動ハンドル22の操作は、ハンドルアセンブリ12が把持具モードにある場合に、起動シャフト38がSULU 500(図1)のクランプ位置を越えて遠位に前進することを防止し、従って、駆動アセンブリ590(図10)の発射を防止する。
【0056】
切断リンクアセンブリ102は、近位リンク106および遠位リンク108を備える。近位リンク106は、可動ハンドル22に形成された円柱形ボス109に、旋回部材106aの周りで旋回可能に固定された近位端、および旋回部材109を介して遠位リンク108の近位端に旋回可能に固定された遠位端を有する。遠位リンク108は、ハンドルアセンブリ12のハウジングキャビティ30内に規定されたトラックに沿って直線状にスライド可能であり、そしてその近位端に形成された、角度の付いた段状部分108aを備える。遠位リンク108は、垂直つめ54に形成されたカム表面110に係合するように、スライド可能に位置する。上で議論されたように、垂直つめ54は、付勢部材56によって、起動シャフト38に形成された切り抜き部58(図39および図40)と係合するように上方に推進されて、SULU 500(図1)がクランプ位置まで移動した後に起動シャフト38の移動を防止する。可動ハンドル22を静止ハンドル20の方に移動させることによって、遠位リンク108の段状部分108aが遠位に移動して垂直つめ54のカム表面110と係合する場合、垂直つめ54は、付勢部材56の付勢に逆らって下方に移動し、起動シャフト38の切り抜き部58との係合から外れる。これが起こると、起動シャフト38は、以下でより詳細に議論されるように、近位に自由に動く。
【0057】
図58もまた参照すると、アクチュエータアセンブリ104は、アクチュエータボタン28、つめアーム116および把持つめ118を備える。以下により詳細に記載されるように、アクチュエータボタン28は、ステープラー10のハンドルアセンブリ12を把持具モードと発射モードとの間で並進させるために、中心合わせされた位置と中心からずれた位置との間で選択的に移動可能である。つめアーム116は、可動ハンドル22に形成された凹部120(図46)にスライド可能に受容される。付勢部材122が、凹部120内に配置されて、つめアーム116を延長位置(図61)の方へと推進する。つめアーム116は、間隔を空けた上下の三角形のカム表面116aおよび116bを有し、これらは、以下でより詳細に議論される。把持つめ118は、つめアーム116の遠位端に形成されたスロット118a(図58)内で旋回可能に支持される。付勢部材124(図36)は、ピストン124aを把持つめ118内に推進して、把持つめ118を、図74に見られるように反時計回り方向に推進するように配置される。把持つめ118の旋回運動は、つめアーム116が起動シャフト38の歯付きラック40(図74)上をラチェット作用またはスライドすることを可能にする。
【0058】
図59もまた参照すると、アクチュエータボタン28は、可動ハンドル22に形成されたボア126(図36)を通って、中心合わせされた位置(図59)から中心からずれた位置(図70)へとスライド可能であるように配置される。ボア126は、凹部120と実質的に直交しており、その結果、アクチュエータボタン28は、つめアーム116の上カム表面116aと下カム表面116bとの間にスライド可能に配置される。アクチュエータボタン28は、実質的に円柱形であり、そして直線状リブ128およびV字型カム部材130を備える。V字型カム部材130はスロット132(図58)を規定し、このスロットは、アクチュエータボタン28が中心合わせされた位置にあり、そしてつめアーム116が凹部120内で延長位置にある場合に、つめアーム116の下カム表面116bを受容するように構成される。アクチュエータボタン28は、スロット132の両側に凹部134(図59)を規定する。アクチュエータボタン28の両端は、ハンドルアセンブリ12(図59)のハウジングセクション12aおよび12bの両側から延び、そしてハンドルアセンブリ12のいずれの側からでも外科医により押されて、アクチュエータボタン28を、ボア126を通していずれの方向にでも直線状に動かして、アクチュエータボタン28を中心合わせされた位置から中心からずれた位置へと動かし得る。アクチュエータボタン28がボア126内で直線状に移動すると、下カム表面116bはV字型カム部材130により係合されて、つめアーム116をその最初の延長位置から下向きに凹部120内で、その後退位置へと推進する。アクチュエータボタン28がその中心からずれた位置へと直線状に移動し、そしてつめアーム116がカム作用されてその後退位置にくると、下カム表面116bの頂点が凹部134のうちの1つに受容されて、アクチュエータボタン28をその中心からずれた位置、または起動位置に保持する(図70を参照のこと)。つめアーム116がその後退位置まで移動すると、把持つめ118もまた、最初の延長位置から後退位置へと移動し、そして起動シャフト38のスロット136(図40)から引き抜かれる。
【0059】
図1、図49および図67を参照すると、アクチュエータボタン28は、可動ハンドル22に支持され、そしてハンドルアセンブリ12のハウジングセクション12aおよび12bの各々を通って延びる。可動ハンドル22を用いてアクチュエータボタン28を動かすことを容易にする目的で、円弧状スロット90が、ハウジングセクション12aおよび12bの各々に提供される。隆起した表面またはボス92が、円弧状スロット90の一部分の周りに提供されて、可動ハンドル22が圧縮位置に移動するまで、アクチュエータボタン28の押下を防止する。
【0060】
図36、図41および図47を参照すると、回転ノブ14は、成形された半セクション14aおよび14bから構成される。各半セクション14a、14bは、内部環状突出部450をその近位端に備え、この突出部は、ハンドルアセンブリ12の遠位端に形成された環状凹部452に受容されて、回転ノブ14をハンドルアセンブリ12に回転可能に固定する。各成形半セクション14aおよび14bの遠位端は、取付具456を回転不可能に受容するための凹部454(図47)を規定する。取付具456は、半セクション14aおよび14bに形成された突出部458(図47)を受容するための切り抜き部456aを備える。取付具456は、本体18の近位端にしっかりと固定され、その結果、回転ノブ14の回転は、本体18、および従って、SULU 500(図1)の回転を起こす。
【0061】
図41〜図44および図47を参照すると、関節運動機構300は、回転可能ノブ14(図41)に形成されたレセプタクル15内に支持され、そして関節運動可能なSULUを関節運動させるように構成される。SULU 500(図1)は、関節運動機構を備えるように図示されないが、SULU 500(図1)は、関節運動機構300の操作に応答して、すなわち、関節運動レバー16の回転の際に、SULU 500(図1)を関節運動させるように構成された関節運動特徴を備えることが想定される。あるいは、ステープラー10は、関節運動するSULUおよび関節運動しないSULUと一緒に使用可能な、相互適合(cross−compatible)デバイスとして構成され得る。関節運動しないSULUと一緒に使用される場合、関節運動アセンブリ300は単に、作動不可能である。
【0062】
関節運動機構300は、関節運動レバー16、機構カバー320、付勢部材322、上クラッチ324、下クラッチ326、メインシャフト328、および並進部材330を備える。下クラッチ326は、レセプタクル15内に回転可能に固定され、そして一連の浅い切込み336および間隔を空けた1対の深い切込み338を有する、円形切込み部分334を備える(図42)。下クラッチ326はまた、メインシャフト328を受容するための寸法にされた中心貫通穴340を規定する。上クラッチ324は、メインシャフト328に回転可能に固定され、そして上表面350および下表面352を有するベース部分344を備える。(図44)。下表面352は、間隔を空けた複数の突出部354を備え、これらの突出部は、下クラッチ326の浅い切込み336および深い切込み338に受容される。付勢部材322は、上クラッチ324の下表面352を推進して、下クラッチ326の切込み部分334と係合させ、関節運動機構300を固定位置に解放可能に固定し、従って、関節運動可能なSULUを関節運動についての固定された角度で解放可能に固定する。
【0063】
メインシャフト328は、実質的に円柱形の本体部分358およびディスク形状のベース部分360を備える。ベース部分360は、カム部材364を受容する開口部362を規定する。本体部分358は、下クラッチ326と上クラッチ324との両方を通って延びるような寸法にされ、その結果、ベース部分360は、回転ノブ14のレセプタクル15内で、上クラッチ324および下クラッチ326の下に配置される。並進部材330(図42)は、メインシャフト328のカム部材364をスライド可能に受容するような寸法にされたカムスロット376を備える。
【0064】
関節運動レバー16が回転すると、上クラッチ324のベース部分344は、下クラッチ326の切込み部分334に対して回転して、上クラッチ324を上方に、付勢部材322の付勢に逆らって推進し、突出部354を切込み部336または338から脱係合させ、そして上クラッチ324およびメインシャフト328の回転を可能にする。その後、付勢部材322は、上クラッチ324を下方に推進して、突出部354を推進して、次の切込み部と係合するように戻す(図41)。突出部354は、SULUがその非関節運動位置にある場合に深い切込み338に受容されるように配置されて、SULUのその非関節運動位置からの移動に対する抵抗を増大させる。関節運動レバー16の回転はまた、並進部材330に対するカム部材364の回転を起こす。カム部材364が回転で駆動されると、並進部材330は、直線状に移動するように推進される。並進部材330は、関節運動可能なSULUの関節運動リンク333に係合するように構成され、その結果、並進部材330の直線状の移動は、関節運動リンク333の直線状の移動を起こして、関節運動可能なSULUの関節運動を起こす。
【0065】
図34、図37、図38、図41および図47〜図57を参照すると、ステープラー10は、SULU解放リンクアセンブリ200を備え、このSULU解放リンクアセンブリは、SULU解放リンク202、SULU解放ボタン204および付勢部材206を備える。解放ボタン204は、把持表面204aを備え、そして回転ノブ14に形成されたキャビティ208内にスライド可能に配置される(図47)。解放ボタン204は、中心壁210および横方向に延びるポスト212を備える。付勢部材206は、中心壁210の近位表面と回転ノブ14に形成されたばねポスト214との間に配置されて、解放ボタン204をキャビティ208内で遠位へと推進する。
【0066】
図37および図38を参照すると、解放リンク202は、近位端202a、細長中心本体部分202bおよび遠位端202cを備える。近位端202aは、解放ボタン204のポスト212を受容するような寸法にされためくら穴(図示せず)を規定し(図34)、その結果、付勢部材206は、ボタン204およびリンク202を遠位方向に推進する。解放リンク202の遠位端202cは、遠位当接部材216および横方向延長部218を備える。横方向延長部218の近位端は、傾斜したカム表面220を規定し、そして横方向延長部218の遠位端は、当接部材216と一緒にタブ保持凹部220を規定する。横方向延長部218はまた、矩形開口部222を備える。
【0067】
図41および図47〜図57を参照すると、ステープラー10の細長本体部分18は、外側管230および内側本体部分232を備え、この内側本体部分を通して制御棒52が挿入される。内側本体232は、外側管230に受容され、そして直径方向に間隔を空けた1対の長手軸方向チャネル234(図52)、および近位に間隔を空けた環状チャネル235を規定する遠位端232aを備え、この環状チャネルは、長手軸方向チャネル234と交差する。内側本体232はまた、解放リンク202をスライド可能に受容するための凹部236(図48)を規定し、その結果、解放リンクが外側管230と内側本体部分232との間でスライド可能に配置される。本体232から半径方向外向きに延びる突出部238が、解放リンク202の横方向延長部218の矩形開口部222内へと延びる。ばね240が、矩形開口部222内で、突出部238と開口部222の遠位端との間に配置されて(図38)、解放リンク202を遠位に推進する。
【0068】
フック242が、外側管230と内側本体部分232との間に、傾斜したカム表面220に隣接して配置される。フック242は、横方向の遠位端246を有する細長本体244を備える。横方向の遠位端246は、制御棒52の切り抜き部248に隣接して配置される。フック242は、付勢部材250によって、フック242の遠位端246が切り抜き部248の外側に位置する位置に推進される。解放ボタン204を近位に引くことによって、解放リンク202が付勢部材206および240の推進に逆らって近位に動かされる場合、カム表面220は、フック242の遠位端246を制御棒52の切り抜き部248内に移動させる。制御棒52が図48に示される後退位置になく、そして切り欠き248がフック242の遠位端246を受容するように配置されない場合、カム表面220は、フック242を内向きに移動させることができず、そしてリンク202は、近位に移動することができない。従って、制御棒52が後退位置にない場合、SULUは、取り外しも取り付けもできない。
【0069】
図50〜図57を参照すると、SULU 500をステープラー10の細長本体18に固定する目的で、タブ260は、内側本体232の長手軸方向チャネル234と整列し、そしてこの長手軸方向チャネル234を通って、図53において矢印「H」により示される方向に前進し、そして矢印「I」により示される方向に回転して環状チャネル235に入らなければならない。上で議論されたように、当接部材216は、タブ260が長手軸方向チャネル234を出るとタブ260に係合するように配置される。タブ260が解放リンク202の当接部材216に係合すると、解放リンク202は、タブ260が完全に環状チャネル235内に位置するまで、図51において矢印「J」により示される方向に、付勢部材206および240の推進に逆らって、近位に移動する。これが起こると、フック242がカム表面220により移動させられて、制御棒52の切り抜き部248に入る。タブ260が完全に環状チャネル235内に位置すると、SULU 500は、図56において矢印「K」により示される方向に、細長本体部分18に対して回転し、その結果、タブ260が移動して、長手軸方向チャネル234との整列から外れる(図56)。これが起こると、解放リンク202は、図57において矢印「L」により示される方向に、その遠位位置に戻り、その結果、タブ260は、タブ保持凹部220a内に保持される。タブ260がタブ保持凹部220a内に位置する場合、SULU 500は、本体部分18に対して回転することを妨げられ、従って、本体部分18上にロックされる。
【0070】
SULU 500を本体部分18から取り外す目的で、SULU解放ボタン204が、図50において矢印「M」により示される方向に近位に動かされて(図50)、当接部材216を近位に後退させ、そしてタブ260をタブ保持凹部220aから外す。タブ260が凹部220aを越えると、SULU 500は回転して、タブ260を長手軸方向チャネル234と整列させ得、そしてSULU 500は、本体部分18から取り外され得る。
【0071】
ステープラー10はまた、SULU 500がステープラー10の本体部分18に取り付けられる前にはステープラー10の作動を防止するための、センサ機構400を備える。図36、図41、図48、および図50を参照すると、センサ機構400は、第一のリンク402、スペーサー404、接続管406、関節運動ロック部材408、第二のリンク410、および起動シャフトロック部材412を備える。第一のリンク402は、プレート様部材を備え、このプレート様部材は、制御棒52と、ステープラー10の細長本体部分18の内側本体部分232との間で、平坦な表面上で支持され、この平坦な表面は、制御棒52に押し付けられる。SULU 500を細長本体部分18に取り付ける前に、第一のリンク402の遠位端402a(図48)は、SULU 500が本体部分18に取り付けられる際にSULU 500の近位端に係合するように、配置される。第一のリンク402は穴414(図41)を備え、この穴は、スペーサー404に形成された突出部416(図48)を受容するような寸法にされる。スペーサー404は、第一のリンク402と外側管230の内側表面との間に、わずかに干渉しながら嵌る。スペーサー404、リンク402および制御棒52の平坦な表面は、一緒に機能して、制御棒52がハウジング232内で回転することを防止する。このことは、フック242と制御棒52の切り欠き248との間の適切な回転整列を確実にする。第一のリンク402の近位端402bは、接続管406の遠位端に当接し、その結果、第一のリンク402の直線状の移動は、センサ管406の直線状の移動を起こす。
【0072】
接続管406は、制御棒52の周りでスライド可能に配置され、そして近位端406aを有する。この近位端は、ロック部材408(図50)の遠位面408aに当接する。ロック部材408もまた、制御棒52の周りでスライド可能に配置される。接続管406が第一のリンク402によって近位に動かされる場合、ロック部材408もまた近位に移動する。ロック部材408は、実質的に円筒形であり、そしてロックタブ420、および関節運動機構300の並進部材330を支持するための上平面421を備える。
【0073】
第二のリンク410(図36)は、ロック部材408の近位端408bに係合するように配置された遠位端410a、およびロック部材412に係合するように配置された近位端410bを有する。第二のリンク410の遠位端410aは、ロック部材408の近位面に当接するように配置された拡大ヘッド426を備える。近位端410bは、ロック部材412に形成された430ウィングに係合するように配置された、段状部分428を備える。付勢部材440は、第二のリンク410を遠位に推進して、ロック部材412との係合から外す。
【0074】
ロック部材412は、ハンドルアセンブリ12内で、ハウジングセクション12aと12bとの間に、旋回部材432の周りで旋回可能に固定される。付勢部材436は、ロック部材412を推進して、起動シャフト38に形成されたスロット434(図40)に入れ、起動シャフト38をその後退位置にロックする。ロック部材408が近位に移動して第二のリンク410を近位に移動させる場合、第二のリンク410の近位端410bは、ロック部材412のウィング430に係合して、ロック部材412を起動シャフト38から脱係合させて、起動シャフト38の遠位への移動を可能にする。
【0075】
SULU 500をステープラー10に取り付ける前に、ロック部材412は、起動シャフト38のスロット434内に配置されて、シャフト38の移動を防止する。SULU 500が内側本体232の遠位端232aに挿入されると(図48)、SULU 500の近位端は第一のリンク402に係合し、そして第一のリンク402、接続管406、ロック部材408および第二のリンク410を近位に移動させる。第二のリンク410が近位に移動すると、リンク410の近位端410bはロック部材412のウィング430に係合して、ロック部材412を起動シャフト38内のスロット434から旋回させて、起動シャフト38のロックを解除する。
【0076】
ステープラー10の使用および操作が、図59〜図91を参照しながら記載される。最初に、発射および再装填アセンブリ600が発射モードに配置され、このモードにおいて、駆動棒591は回転結合器620に係合する(図30〜図31および図63〜図64を参照のこと)。図59〜図61を参照すると、上記のように、アクチュエータボタン28がその中心合わせされた位置にある状態で、つめアーム116は、付勢部材122によってその延長位置に推進される。つめアーム116がその延長位置にある場合、把持つめ118は、起動シャフト38に形成されたスロット136(図61)内に延びるように配置される。この位置は、ハンドルアセンブリ12の把持具モードに対応する。従って、可動ハンドル22が図60において矢印「A」により示される方向に起動されると、駆動つめ42は起動シャフト38のアバットメント138(図61)に係合して、起動シャフト38を、図61において矢印「B」により示される方向に遠位に前進させて、制御棒52を遠位に移動させる。制御棒52の遠位への並進は、次に、回転結合器620を遠位に並進させ、これが駆動棒591および動的クランプ留め部材593を遠位に推進して、上記のようにSULU 500をクランプ位置に移動させる。この把持具モードにおいて、垂直つめ54が起動シャフト38から脱係合するので、可動ハンドル22は、非圧縮位置に戻って制御棒52を近位に戻し得、従って、駆動棒591を近位に並進させ、そしてSULU 500を非クランプ位置(図3)に戻し得る。
【0077】
ハンドルアセンブリ12が把持具モードにある場合、可動ハンドル22を静止ハンドル20の方へと圧縮すること、および可動ハンドル22を静止ハンドル20から離れた非圧縮位置に戻すことにより、SULU 500のクランプおよび脱クランプがそれぞれ起こる。より具体的には、図63〜図66をさらに参照すると、可動ハンドル22を静止ハンドル20の方へと圧縮すると、制御棒52は部分的に遠位に前進し、その結果、回転結合器620が部分的に遠位に推進され、従って、駆動棒591を遠位に推進し、その結果、動的クランプ留め部材593の上梁593aがT字型チャネル509の上部の横向き部分内に前進し、遠位梁593bが枠部材516および中心支持部材531の外側に沿って並進し、そして直立部材593cがチャネル574内に並進して、アンビルアセンブリ506をカートリッジアセンブリ514に対して旋回させて、クランプ位置にする(図3〜図6を参照のこと)。駆動棒591のこの部分的な前進は、駆動棒591の約15mmの増分に対応し得るが、他の増分距離もまた、SULUの構成に依存して想定される。可動ハンドル22を非圧縮位置に戻すと、制御棒52が近位に戻り、その結果、回転結合器620が近位に戻る。回転結合器620の近位への並進は、駆動棒591の近位への並進(例えば、近位方向に約15mm)を起こし、その結果、上梁593aは、T字型チャネル509の上部横向き部分から外され、遠位梁593bは、枠部材516および中心支持部材531の外部で近位に並進し、そして直立部材593cは、チャネル574から外されて、アンビルアセンブリ506をカートリッジアセンブリ514に対して旋回させ、非クランプ位置に戻す(図3〜図6を参照のこと)。
【0078】
特に図63〜図64を参照すると、回転結合器620が部分的にのみ遠位に並進し(例えば、15mmの増分)、引き続いて近位に戻る場合、回転結合器620は遠位カム640の近位に残り、従って、ハンドルアセンブリ12が把持具モードにある間に繰り返し圧縮および解放される際に、発射および再装填アセンブリ600は、発射モードに配置されたままである。すなわち、ハンドルアセンブリ12が把持具モードにある状態で、アンビルアセンブリ504は、上記のように、発射および再装填アセンブリ600を再装填位置に並進させることなく、開位置(図3)とクランプ位置(図4)との間で繰り返し旋回可能である。
【0079】
図59〜図61を再度参照すると、把持具モードにおいて、可動ハンドル22が静止ハンドル20の方へと圧縮されるにつれて、遠位リンク108もまた、図61において矢印「C」により示される方向に遠位に移動し、その結果、遠位リンク108の段状部分108aは、垂直つめ54のカム表面110に係合して、垂直つめ54を下向きに、図61において矢印「D」により示される方向に、ばね112の付勢に逆らって、起動シャフト38の切り抜き部58から離れる方に推進する。
【0080】
図62も参照すると、可動ハンドル22がその非圧縮位置に、図62において矢印「E」により示される方向に、ばね34によって戻される場合、把持つめ118は、スロット136を規定する起動シャフト38の近位部分136aに係合して、可動ハンドルを、非圧縮位置と圧縮位置との間の中間位置に保持する。ばね34が軽いばねであり、SULU 500の構成要素に関連する摩擦に起因して、起動シャフト38(および制御棒52)を近位に動かし得ないことが留意される。しかし、外科医は、ハンドル22を図62において矢印「E」により示される方向に動かすことによって、可動ハンドル22を操作し得、起動シャフト38を矢印「B」により示される方向に動かし得、従って、SULU 500(図1)を非クランプ位置(図3)に動かし得る。垂直つめ54が遠位リンク108によってその後退位置に維持されるので、起動シャフト38は、近位に移動することを許容される。可動ハンドル22は、把持つめ118とスロット136の近位部分136aとの係合によって、その完全に非圧縮の位置に動くことを防止される。このことは、遠位リンク108の段状部分108aを垂直つめ54のカム表面110から脱係合させる位置まで遠位リンク108を可動ハンドル22が後退させることを防止する。従って、垂直つめ54は起動シャフト38から脱係合したままであり、従って、ハンドルアセンブリ12は把持具モードにあるままである。
【0081】
図67〜図74を参照すると、可動ハンドル22が圧縮位置に移動し、そしてアクチュエータボタン28が中心合わせされた位置から中心からずれた位置へと移動する場合、ハンドルアセンブリ12は、発射モードに並進される。より具体的には、可動ハンドル22が圧縮位置に移動し、そしてアクチュエータボタン28が中心合わせされた位置から中心からずれた位置へと移動する場合、V字型カム部材130がつめアーム116の下カム表面116bに係合して、つめアーム116を矢印「F」により示される方向に、可動ハンドル22の凹部120(図68)内で後退させ、そして把持つめ118を起動シャフト38のスロット136内から後退させる。把持つめ118がスロット136から外されると、付勢部材34(図61)は、可動ハンドル22を図73において矢印「G」により示される方向に戻して、その完全に非圧縮の位置にする。これが起こると、遠位リンク108は、可動ハンドル22により近位に引かれ、遠位リンク108の段状部分108aを垂直つめ54のカム表面110から脱係合させる。垂直つめ54は、付勢部材56によって、起動シャフト38の切り抜き部58と係合するように動かされ、起動シャフト38の近位運動を防止する(すなわち、起動シャフト38がその最初の位置に戻る後退を防止する)。従って、制御棒52(図60)、回転結合器620(図63)、および駆動棒591(図63)もまた、それぞれの最初の位置に近位に戻ることを妨げられる。従って、図74に示されるように、可動ハンドル22が再度、圧縮位置に移動すると、駆動つめ42(図61)は、起動シャフト38の歯付きラック40に係合して、起動シャフト38をさらに遠位に(例えば、さらに15mmの増分で)前進させ、従って、制御棒52(図60)、回転結合器620(図63)、および駆動棒591(図63)をさらなる増分だけ前進させて、SULU 500(図1)を少なくとも部分的に発射させる。起動シャフト38が遠位に移動するにつれて、垂直つめ54および把持つめ118が、起動シャフト38の歯付きラック40上をラチェット作用するか、またはスライドする。
【0082】
図74〜図80を参照すると、上記のように、ハンドルアセンブリ12が発射モードにある状態で可動ハンドル22が圧縮位置に移動する場合(図74を参照のこと)、駆動つめ42(図61)は、起動シャフト38の歯付きラック40に係合して、起動シャフト38を前進させ、制御棒52(図60)を遠位にさらなる増分で前進させる。発射および再装填アセンブリ600が発射モードに位置する状態で、制御棒52が遠位にさらなる増分で前進すると、回転結合器620も同様に、次第に遠位に並進する。回転結合器620のこの遠位への並進は、次に、駆動棒591の遠位への並進を起こす。なぜなら、回転結合器620のブロック突出部622が駆動棒591の対向する切り抜き部683、684に受容されるからである。より具体的には、駆動棒591は、遠位にさらなる増分で、ロックリング650に対して前進し、ロックリング650を第一の位置に回転させ、従って、再装填棒660、670の並進を妨げ、そしてこのロックリングを通る駆動棒591の前進を可能にする。
【0083】
駆動棒591がこの増分で前進すると、駆動棒591に結合されたカム棒595もまた、この増分の長さ(例えば、約15mm)だけ遠位に前進する。従って、カム棒595のカム楔596は最終的に、コンベヤ540、550の最近位のプッシャー580と接触するまで並進する。カム棒595のカム楔596が最近位のプッシャー580と接触すると、最近位のプッシャー580は、コンベヤ540、550の下部分のコンベヤリンク566から、コンベヤ540、550のそれぞれの上部組織接触表面570、556に配置されたコンベヤリンク566内へと部分的に、中間位置まで推進されて、この中間位置において、最近位のプッシャー580は、上下のコンベヤリンク566の各々の中に部分的に配置される。1つの実施形態において、最近位のコンベヤリンク566は、図65〜図66に示されるように、内部に配置されたステープル「S」を備えず、従って、この時点ではステープル「S」は発射されない。最近位のプッシャー580が上下のコンベヤリンク566の各々の中に部分的に配置される、この中間位置への最近位のプッシャー580の並進は、コンベヤ540、550が回転しないようにロックし、従って、引き続く発射操作中に、コンベヤリンク566の適切な配置が維持されることを確実にする。
【0084】
図72を参照すると、アクチュエータボタン28が起動されてその中心からずれた位置にある場合、すなわち、ハンドルアセンブリ12(図1)が発射モードにある場合、直線状リブ128は、ハウジングセクション12aの内壁に配置されたカム表面144に係合する位置に移動する。カム表面144は、角度の付いた面を備え、この角度の付いた面は、可動ハンドル22(図67)がその非圧縮位置に戻る際に、直線状リブ128に係合するように位置して、アクチュエータボタン28をその中心合わせされた位置に戻す。上カム表面116aとV字型カム部材130との相互作用もまた、アクチュエータボタン28をその中心合わせされた位置に推進する。これが起こると、つめアーム116および把持つめ118は、それらの延長位置に戻る。起動シャフト38が遠位に前進しており、そして把持つめ118が起動シャフト38のスロット136と整列していないので、可動ハンドル22は、可動ハンドル22の各起動行程後に、その非圧縮位置に戻る。
【0085】
可動ハンドル22の引き続く圧縮の際に、制御棒52、回転結合器620、および駆動棒591は、さらなる増分で遠位に並進する。駆動棒591がこのさらなる増分で(例えば、さらに15mm)前進すると、駆動棒のカム楔596が推進されて、コンベヤ540、550の下部のコンベヤリンク566内に配置されたプッシャー580と接触する。カム棒595がさらに遠位に推進されるにつれて、カム楔596を規定する角度の付いた表面が、プッシャー580の角度の付いた表面584に沿ってカム作用し、その結果、プッシャー580は、カートリッジアセンブリ614の上部組織接触表面を形成するコンベヤリンク566内に上向きに推進されて、ステープル「S」を排出する。カム棒595の前進よりわずかに遅れて、動的クランプ留め部材593がチャネル574を通って前進して、コンベヤ540と550との間の組織を分割する。理解され得るように、駆動棒591のこの増分(15mm)での前進は、次の最近位の群のコンベヤリンク566からのステープル「S」のみを発射し、そしてこれらのコンベヤリンク566に隣接する組織のみを切断する。可動ハンドル22の引き続く圧縮は、駆動棒591をさらに遠位に(15mmの増分で)次第に前進させ、その結果、さらなる群のステープル「S」が、それぞれのコンベヤリンク566から排出され、そしてその結果、さらなる組織の部分が切断される。従って、ステープル線の長さ(例えば、15mm、30mm、45mmなど)に依存して、アンビルアセンブリ506とカートリッジアセンブリ514との間に把持された組織の全部分をステープル留めして分割するためにSULU 500を完全に発射するためには、可動ハンドル22を数回圧縮して戻すことが必要とされ得る。あるいは、ハンドルアセンブリ12は、可動ハンドル22の1回の圧縮でステープル「S」を排出して組織を切断するために、SULU 500が完全に発射されるように構成されてもよい。
【0086】
SULU 500が完全に発射された後に、すなわち、駆動棒591の全発射行程の終了時に、回転結合器620は、遠位カム640の歯付き近位部分642に接触し、そしてそれぞれの歯の係合に起因して、遠位カム640に対して部分的に回転する。
【0087】
図81〜図86を参照すると、一旦、SULU 500が完全に発射されて、制御棒52ならびに従って発射および再装填アセンブリ600の回転結合器620を近位に並進させると、後退ノブ26(図36)が近位に並進する。より具体的には、後退ノブ26(図36)の後退の際に、回転結合器620が近位に移動し、その結果、回転結合器620の歯付き近位部分627が最終的に、近位カム630の歯付き遠位部分632に接触して、回転結合器620を、部分的に回転した位置から、駆動棒591が回転結合器620から脱係合し、そして再装填棒660、670が回転結合器620に係合する位置へと回転させる。この位置は、発射および再装填アセンブリ600の再装填モードに対応する。
【0088】
図87〜図91をさらに参照すると、発射および再装填アセンブリ600が今は再装填モードにある(再装填棒660、670が回転結合器620に係合している)状態で、可動ハンドル22(図36)が再度圧縮されて、SULU 500を再装填し得、その結果、新たなセットのコンベヤリンク566が、カートリッジアセンブリ514の上部組織接触表面を形成する。SULU 500を再装填する目的で、可動ハンドル22(図36)が初めて圧縮されて、制御棒52および回転結合器620を遠位に1増分だけ前進させる。回転結合器620が遠位に前進すると、再装填モードにおいて回転結合器620に結合している再装填棒660、670が同様に、1増分だけ遠位に並進する。再装填棒660、670がこの初期の増分で並進すると、再装填棒660、670は、ロックリング650を通って遠位に並進し、従って、ロックリング650を第二の位置に回転させ、駆動棒591の並進を妨げる。可動ハンドル22の引き続く圧縮の際に、再装填棒660、670は、さらに遠位に次第に並進し、その結果、再装填棒660、670は、カートリッジアセンブリ514の上部組織接触表面を形成する最近位のコンベヤリンク566の近位端に接触し、そしてコンベヤリンク566を遠位に推進し、その結果、コンベヤ540、550が、それぞれ近位スプロケット542、552および遠位スプロケット544、554の周りで回転する。最終的に、図87〜図89に最もよく示されるように、可動ハンドル22の充分な回数の圧縮の際に、コンベヤ540、550が回転し、その結果、新たなセットのコンベヤリンク566が、カートリッジアセンブリ514の上部組織接触表面を形成するように配置され、同時にコンベヤリンク566(今は内部に配置されたプッシャー580を備える。先に発射されたステープルを支持していた)が遠位スプロケット544、554の周りで回転して、カートリッジアセンブリ514の下部分にくる。理解され得るように、一旦、プッシャー580がカートリッジアセンブリ514の下部分に配置されると、新たなセットのコンベヤリンク566がカートリッジアセンブリ514の上部分に位置する状態で、カートリッジアセンブリ514は、引き続く使用のために完全に再装填される。
【0089】
図87〜図91をなお参照し、特に図90を参照すると、再装填棒660、670の完全再装填行程が達成されて、新たなセットのコンベヤリンク566を、カートリッジアセンブリ514の上部組織接触表面を形成する位置に回転させると、回転結合器620は遠位カム640の歯付き近位部分642に接触し、そしてそれらの歯の係合に起因して、遠位カム640に対して部分的に回転する。その後、例えば後退ノブ26(図1)の後退によって、回転結合器620を完全に後退させると、回転結合器620が近位に引かれ、その結果、回転結合器620の歯付き近位部分627が最終的に、近位カム630の歯付き遠位部分632に接触し、回転結合器620を、部分的に回転した位置から、再装填棒660、670が回転結合器620から脱係合して駆動棒591が回転結合器620に係合する位置へと回転させる。この位置は、発射および再装填アセンブリ600の発射モードに対応する。理解され得るように、発射および再装填アセンブリ600が再度発射モードに配置され、そしてコンベヤ540、550が、新たなセットのステープル収容コンベヤリンク566をカートリッジアセンブリ514の上表面に配置するように回転した状態で、ステープラー10は、上記と同様に作動して、第二のセット、第三のセットなどのステープル「S」を発射し得る。
【0090】
解放可能なSULU 500に関連して記載されたが、外科手術用ステープラー10はまた、一体化されたツールアセンブリで形成され得ることが想定される。より具体的には、カートリッジアセンブリおよびアンビルアセンブリ(すなわち、ツールアセンブリ)は、ステープラー10の細長本体部分18と一体的に形成され得、その結果、例えば、コンベヤ540、550は、増大した長さを規定して、より多数回の発射/再装填操作を可能にし得る。ステープラー10はまた、(内視鏡手順ではなく)観血外科手術手順と組み合わせて使用するために適合され得る。ステープラー10は、ハンドルアセンブリ12の起動によって作動可能であるのではなく、ロボットによって、または他の任意の適切なシステムもしくは機構によって、作動される(例えば、発射および再装填される)ように構成されることもまた、想定される。
【0091】
最後に、コンベヤアセンブリ以外の機構が、ステープラーの再装填を行うために提供され得ることもまた想定される。例えば、回転可能バレルアセンブリが想定される。この回転可能バレルアセンブリは、長手方向軸を規定し、そして複数列またはセットのリンク(コンベヤリンク566と類似)を備える、回転可能バレルを備え得、これらのリンクは、等間隔の種々の円周上の位置(例えば、0°(この角度でこれらのリンクは、組織接触表面を形成する)、90°、180°、および270°)で、この回転可能バレルに係合する。このような実施形態において、駆動棒が、回転可能バレルを通して前進させられて、この組織接触表面を形成するリンクから、ステープルを排出し得る。その後、このバレルは、長手方向軸の周りで回転して、新たなセットのリンクが引き続く発射のために組織接触表面を形成するように、位置させ得る(すなわち、新たなセットのリンクを0°の位置まで回転させ得る)。
【0092】
上記のことから、種々の図面を参照して、当業者は、特定の改変もまた、本開示の範囲から逸脱することなく本開示に対してなされ得ることを理解する。本開示の数個の実施形態が図面に示されたが、本開示はこれらに限定されることを意図されない。なぜなら、本開示は当該分野が許容すると同程度に範囲が広いこと、および本明細書も同様に読まれることが意図されるからである。従って、上記説明は、限定であると解釈されるべきではなく、単に、特定の実施形態の例示であると解釈されるべきである。当業者は、添付の特許請求の範囲の趣旨および範囲内で、他の改変を予測する。
【符号の説明】
【0093】
10 ステープラー
12 ハンドルアセンブリ
14 回転ノブ
16 関節運動レバー
18 細長本体部分
500 SULU
502 近位本体部分
504 ツールアセンブリ
506 アンビルアセンブリ
514 カートリッジアセンブリ
【特許請求の範囲】
【請求項1】
ステープル形成凹部を規定するアンビルアセンブリ;ならびに
カートリッジアセンブリであって、該アンビルアセンブリおよび該カートリッジアセンブリのうちの少なくとも一方は、他方に対して開位置とクランプ位置との間で旋回可能であり、該カートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを備え、該第一の複数のステープルは最初、該カートリッジアセンブリからの排出のために、該アンビルアセンブリの該ステープル形成凹部と整列して位置し、該第二の複数のステープルは、該アンビルアセンブリの該ステープル形成凹部と整列しない第一の位置から、該カートリッジアセンブリからの引き続く排出のために該ステープル形成凹部と整列した第二の位置へと移動可能であるように、該カートリッジアセンブリ内に支持されている、カートリッジアセンブリ、
を備える、外科手術用ステープラー。
【請求項2】
前記第一の複数のステープルは、前記カートリッジアセンブリからの該第一の複数のステープルの排出前に、第一の複数のコンベヤリンク内に収容されており、そして前記第二の複数のステープルは、該カートリッジアセンブリからの該第二の複数のステープルの排出前に、第二の複数のコンベヤリンク内に収容されている、請求項1に記載のステープラー。
【請求項3】
前記第一の複数のコンベヤリンクおよび前記第二の複数のコンベヤリンクが、1つのコンベヤ上に支持されており、該コンベヤは、前記第二の複数のステープルを前記第一の位置から前記第二の位置へと回転させるように回転可能である、請求項2に記載のステープラー。
【請求項4】
前記第一の複数のコンベヤリンクは最初、前記コンベヤの上部組織接触部分を規定し、前記第二の複数のコンベヤリンクは最初、該コンベヤの上部近位部分を規定し、そして第三の複数のコンベヤリンクは最初、該コンベヤの下部遠位部分を規定する、請求項3に記載のステープラー。
【請求項5】
最初に前記第三の複数のコンベヤリンク内に配置される複数のプッシャーをさらに備え、該複数のプッシャーは、前記第一の複数のステープルを前記カートリッジアセンブリから排出するために、該第三の複数のコンベヤリンク内から前記第一の複数のコンベヤリンク内の位置へと移動可能である、請求項4に記載のステープラー。
【請求項6】
前記第二の複数のステープルが前記第二の位置へと移動する際に、前記第一の複数のコンベヤリンクは、前記コンベヤの前記下部遠位部分を規定するように位置し、そして前記第二の複数のコンベヤリンクは、該コンベヤの前記上部組織接触部分を規定するように位置する、請求項5に記載のステープラー。
【請求項7】
前記第二の複数のステープルが前記第二の位置にある際に、前記複数のプッシャーは、前記第二の複数のステープルを前記カートリッジアセンブリから排出するために、前記第一の複数のコンベヤリンク内から前記第二の複数のコンベヤリンク内へと移動可能であるように配置される、請求項6に記載のステープラー。
【請求項8】
前記カートリッジアセンブリを通って選択的に並進可能な少なくとも1つのカム棒をさらに備え、該少なくとも1つのカム棒は、該少なくとも1つのカム棒が該カートリッジアセンブリを通って並進する際に、前記アンビルアセンブリの前記ステープル形成凹部と整列して位置する前記ステープルを該カートリッジアセンブリから排出するように構成されている、請求項1に記載のステープラー。
【請求項9】
前記カートリッジアセンブリを通って選択的に並進可能な少なくとも1つの再装填棒をさらに備え、該少なくとも1つの再装填棒は、該少なくとも1つの再装填棒が該カートリッジアセンブリを通って並進する際に、前記第一の位置から前記第二の位置への前記第二の複数のステープルの移動を起こすように構成されている、請求項1に記載のステープラー。
【請求項10】
発射および再装填アセンブリをさらに備え、該発射および再装填アセンブリは、発射モードと再装填モードとの間で並進可能であり、該発射モードは、前記アンビルアセンブリの前記ステープル形成凹部と整列した位置にある前記ステープルを排出するためのモードであり、そして該再装填モードは、前記第二の複数のステープルを前記第一の位置から前記第二の位置へと回転させるためのモードである、請求項1に記載のステープラー。
【請求項11】
前記発射および再装填アセンブリは、該発射および再装填アセンブリの完全な前進および後退に応答して、前記発射モードと前記再装填モードとの間で交互に並進する、請求項10に記載のステープラー。
【請求項12】
アンビルアセンブリ;
カートリッジアセンブリであって、該アンビルアセンブリおよび該カートリッジアセンブリのうちの少なくとも一方は、他方に対して開位置とクランプ位置との間で旋回可能であり、該カートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを収容する、カートリッジアセンブリ;
該第一の複数のステープルを該カートリッジアセンブリから排出するために、該カートリッジアセンブリを通って並進可能である駆動棒;
該カートリッジアセンブリ内の該第二の複数のステープルを該カートリッジアセンブリからの引き続く排出のための位置へと移動させるために、該駆動棒とは独立して該カートリッジアセンブリを通って並進可能である少なくとも1つの再装填棒;ならびに
結合器を備える発射および再装填アセンブリであって、該発射および再装填アセンブリは、発射モードと再装填モードとの間で並進可能であり、該発射および再装填アセンブリが該発射モードにある場合、該結合器は該駆動棒と係合し、そして該発射および再装填アセンブリが該再装填モードにある場合、該結合器は該少なくとも1つの再装填棒と係合する、発射および再装填アセンブリ、
を備える、外科手術用ステープラー。
【請求項13】
前記発射モードでの前記結合器の並進は、前記駆動棒を前進させて、前記第一の複数のステープルを前記カートリッジアセンブリから排出する、請求項12に記載のステープラー。
【請求項14】
前記再装填モードでの前記結合器の並進は、前記少なくとも1つの再装填棒を前進させて、前記カートリッジアセンブリ内の前記第二の複数のステープルを、該カートリッジアセンブリからの引き続く排出のための位置へと移動させる、請求項12に記載のステープラー。
【請求項15】
前記結合器が前記再装填モードで並進して前記第二の複数のステープルを引き続く排出のための位置へと移動させた後の、前記発射モードでの該結合器の並進は、該第二の複数のステープルを前記カートリッジアセンブリから排出する、請求項14に記載のステープラー。
【請求項1】
ステープル形成凹部を規定するアンビルアセンブリ;ならびに
カートリッジアセンブリであって、該アンビルアセンブリおよび該カートリッジアセンブリのうちの少なくとも一方は、他方に対して開位置とクランプ位置との間で旋回可能であり、該カートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを備え、該第一の複数のステープルは最初、該カートリッジアセンブリからの排出のために、該アンビルアセンブリの該ステープル形成凹部と整列して位置し、該第二の複数のステープルは、該アンビルアセンブリの該ステープル形成凹部と整列しない第一の位置から、該カートリッジアセンブリからの引き続く排出のために該ステープル形成凹部と整列した第二の位置へと移動可能であるように、該カートリッジアセンブリ内に支持されている、カートリッジアセンブリ、
を備える、外科手術用ステープラー。
【請求項2】
前記第一の複数のステープルは、前記カートリッジアセンブリからの該第一の複数のステープルの排出前に、第一の複数のコンベヤリンク内に収容されており、そして前記第二の複数のステープルは、該カートリッジアセンブリからの該第二の複数のステープルの排出前に、第二の複数のコンベヤリンク内に収容されている、請求項1に記載のステープラー。
【請求項3】
前記第一の複数のコンベヤリンクおよび前記第二の複数のコンベヤリンクが、1つのコンベヤ上に支持されており、該コンベヤは、前記第二の複数のステープルを前記第一の位置から前記第二の位置へと回転させるように回転可能である、請求項2に記載のステープラー。
【請求項4】
前記第一の複数のコンベヤリンクは最初、前記コンベヤの上部組織接触部分を規定し、前記第二の複数のコンベヤリンクは最初、該コンベヤの上部近位部分を規定し、そして第三の複数のコンベヤリンクは最初、該コンベヤの下部遠位部分を規定する、請求項3に記載のステープラー。
【請求項5】
最初に前記第三の複数のコンベヤリンク内に配置される複数のプッシャーをさらに備え、該複数のプッシャーは、前記第一の複数のステープルを前記カートリッジアセンブリから排出するために、該第三の複数のコンベヤリンク内から前記第一の複数のコンベヤリンク内の位置へと移動可能である、請求項4に記載のステープラー。
【請求項6】
前記第二の複数のステープルが前記第二の位置へと移動する際に、前記第一の複数のコンベヤリンクは、前記コンベヤの前記下部遠位部分を規定するように位置し、そして前記第二の複数のコンベヤリンクは、該コンベヤの前記上部組織接触部分を規定するように位置する、請求項5に記載のステープラー。
【請求項7】
前記第二の複数のステープルが前記第二の位置にある際に、前記複数のプッシャーは、前記第二の複数のステープルを前記カートリッジアセンブリから排出するために、前記第一の複数のコンベヤリンク内から前記第二の複数のコンベヤリンク内へと移動可能であるように配置される、請求項6に記載のステープラー。
【請求項8】
前記カートリッジアセンブリを通って選択的に並進可能な少なくとも1つのカム棒をさらに備え、該少なくとも1つのカム棒は、該少なくとも1つのカム棒が該カートリッジアセンブリを通って並進する際に、前記アンビルアセンブリの前記ステープル形成凹部と整列して位置する前記ステープルを該カートリッジアセンブリから排出するように構成されている、請求項1に記載のステープラー。
【請求項9】
前記カートリッジアセンブリを通って選択的に並進可能な少なくとも1つの再装填棒をさらに備え、該少なくとも1つの再装填棒は、該少なくとも1つの再装填棒が該カートリッジアセンブリを通って並進する際に、前記第一の位置から前記第二の位置への前記第二の複数のステープルの移動を起こすように構成されている、請求項1に記載のステープラー。
【請求項10】
発射および再装填アセンブリをさらに備え、該発射および再装填アセンブリは、発射モードと再装填モードとの間で並進可能であり、該発射モードは、前記アンビルアセンブリの前記ステープル形成凹部と整列した位置にある前記ステープルを排出するためのモードであり、そして該再装填モードは、前記第二の複数のステープルを前記第一の位置から前記第二の位置へと回転させるためのモードである、請求項1に記載のステープラー。
【請求項11】
前記発射および再装填アセンブリは、該発射および再装填アセンブリの完全な前進および後退に応答して、前記発射モードと前記再装填モードとの間で交互に並進する、請求項10に記載のステープラー。
【請求項12】
アンビルアセンブリ;
カートリッジアセンブリであって、該アンビルアセンブリおよび該カートリッジアセンブリのうちの少なくとも一方は、他方に対して開位置とクランプ位置との間で旋回可能であり、該カートリッジアセンブリは、第一の複数のステープルおよび第二の複数のステープルを収容する、カートリッジアセンブリ;
該第一の複数のステープルを該カートリッジアセンブリから排出するために、該カートリッジアセンブリを通って並進可能である駆動棒;
該カートリッジアセンブリ内の該第二の複数のステープルを該カートリッジアセンブリからの引き続く排出のための位置へと移動させるために、該駆動棒とは独立して該カートリッジアセンブリを通って並進可能である少なくとも1つの再装填棒;ならびに
結合器を備える発射および再装填アセンブリであって、該発射および再装填アセンブリは、発射モードと再装填モードとの間で並進可能であり、該発射および再装填アセンブリが該発射モードにある場合、該結合器は該駆動棒と係合し、そして該発射および再装填アセンブリが該再装填モードにある場合、該結合器は該少なくとも1つの再装填棒と係合する、発射および再装填アセンブリ、
を備える、外科手術用ステープラー。
【請求項13】
前記発射モードでの前記結合器の並進は、前記駆動棒を前進させて、前記第一の複数のステープルを前記カートリッジアセンブリから排出する、請求項12に記載のステープラー。
【請求項14】
前記再装填モードでの前記結合器の並進は、前記少なくとも1つの再装填棒を前進させて、前記カートリッジアセンブリ内の前記第二の複数のステープルを、該カートリッジアセンブリからの引き続く排出のための位置へと移動させる、請求項12に記載のステープラー。
【請求項15】
前記結合器が前記再装填モードで並進して前記第二の複数のステープルを引き続く排出のための位置へと移動させた後の、前記発射モードでの該結合器の並進は、該第二の複数のステープルを前記カートリッジアセンブリから排出する、請求項14に記載のステープラー。
【図1】


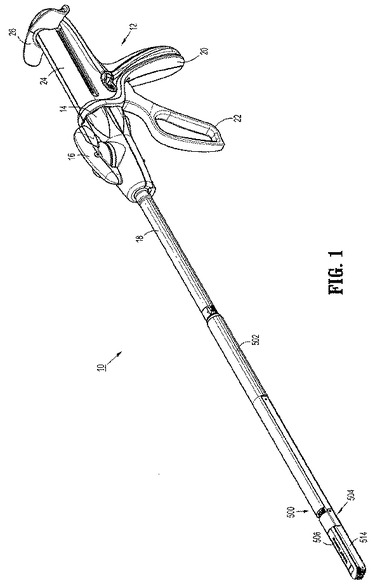
【図2】
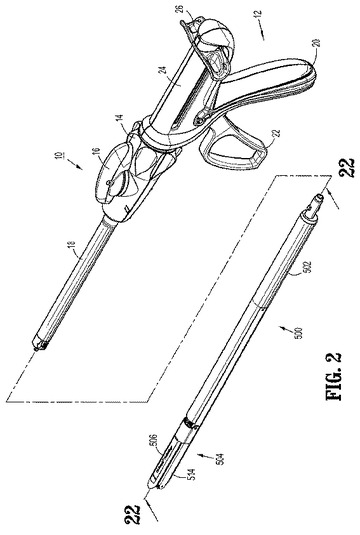
【図3】
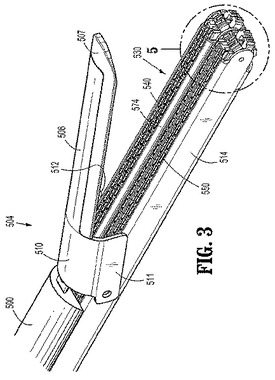
【図4】
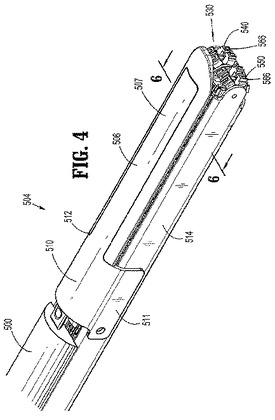
【図5】
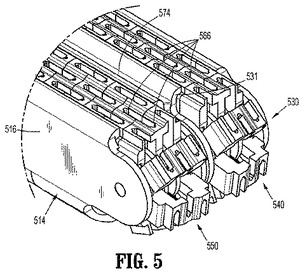
【図6】
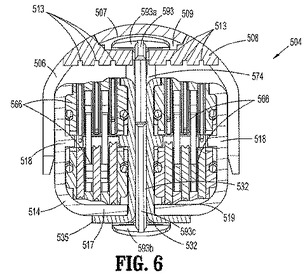
【図7】
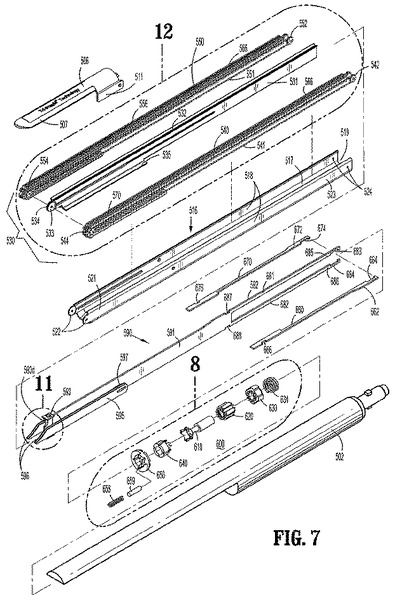
【図8】
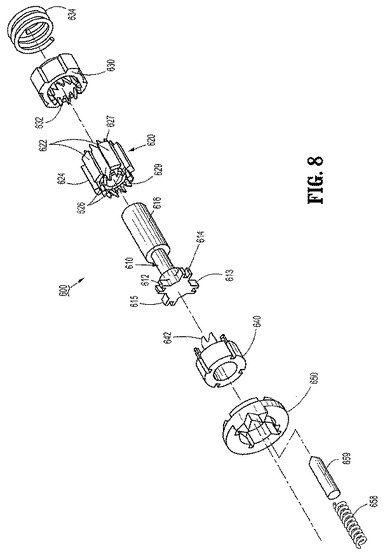
【図9】
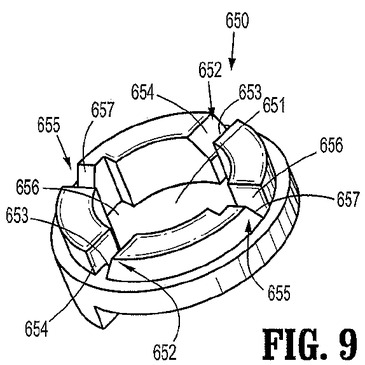
【図10】
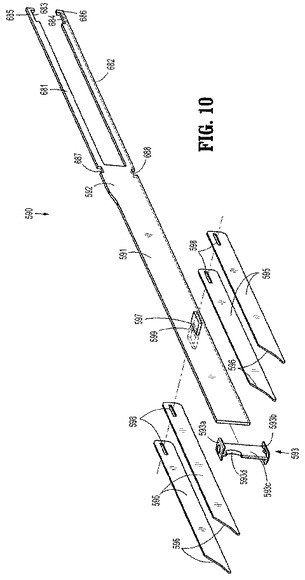
【図11】
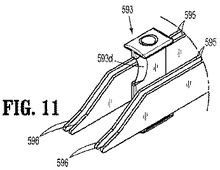
【図12】
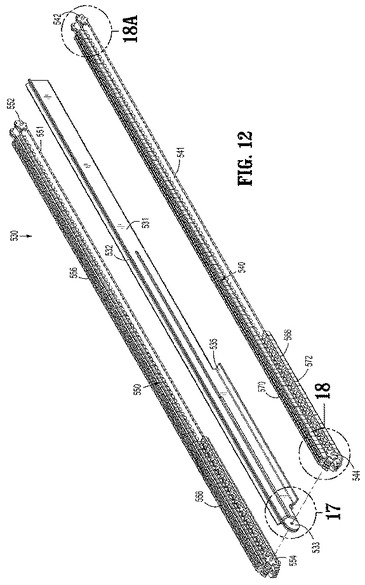
【図13】
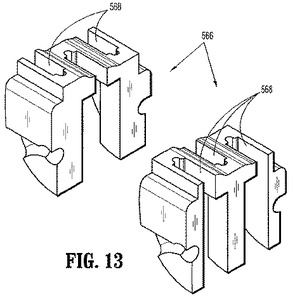
【図14】
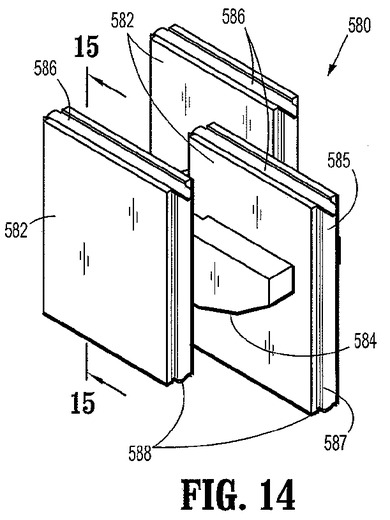
【図14A】
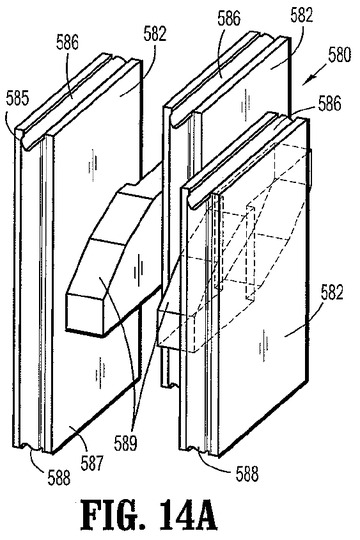
【図15】
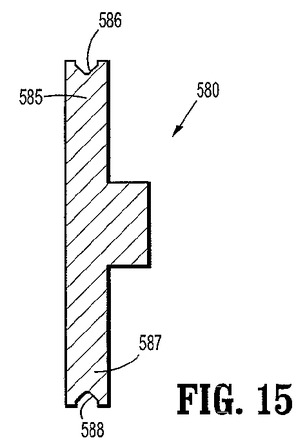
【図16】
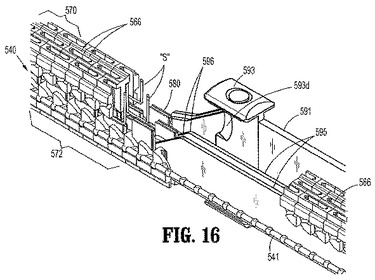
【図17】
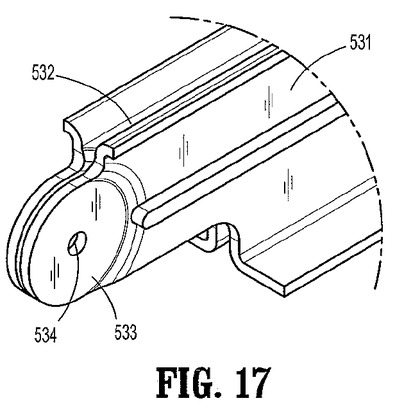
【図18】
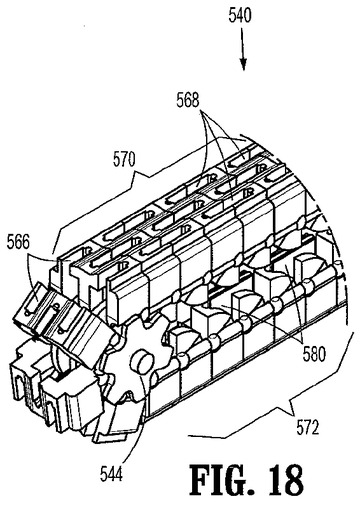
【図18A】
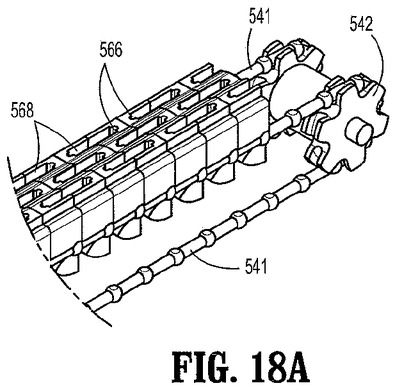
【図19】
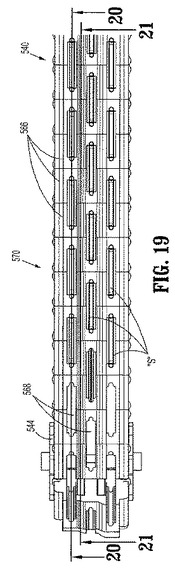
【図20】
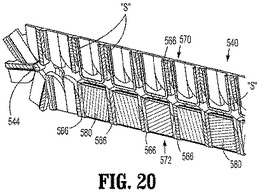
【図21】
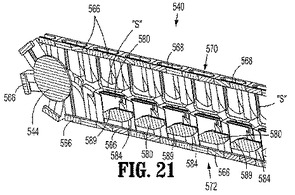
【図22】
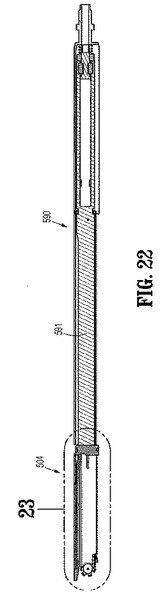
【図23】
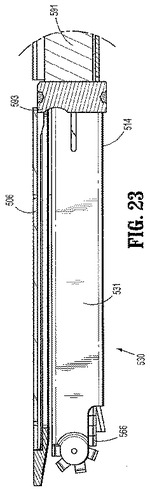
【図24】
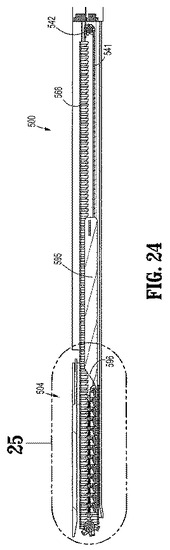
【図25】
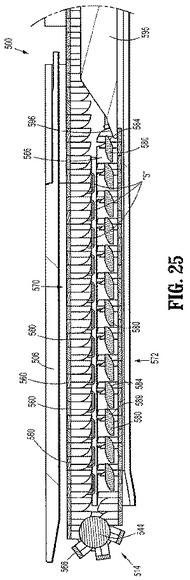
【図26】
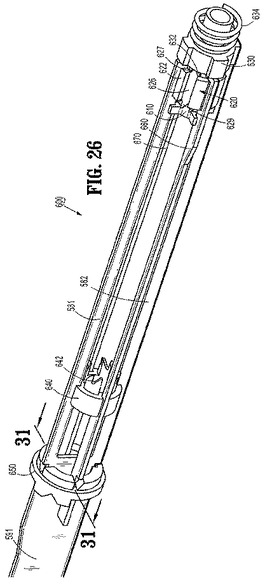
【図27】
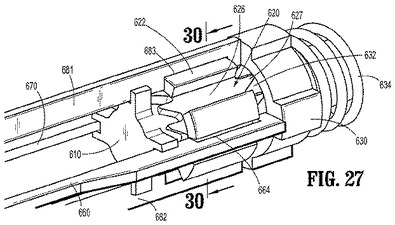
【図28】
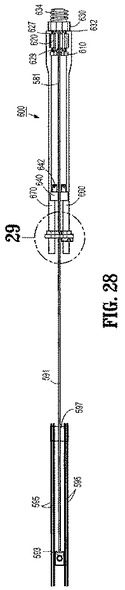
【図29】
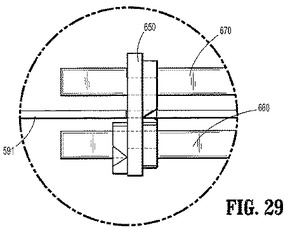
【図30】
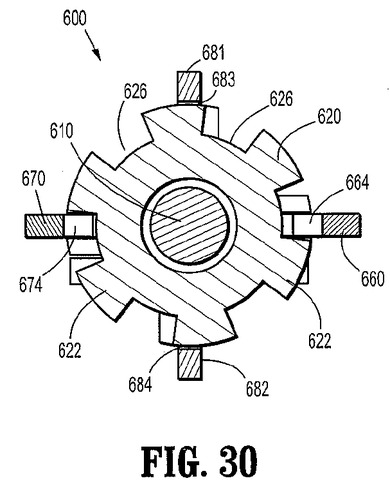
【図31】
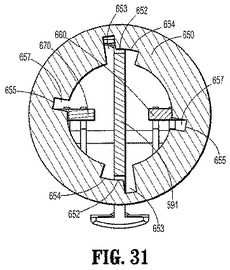
【図32】
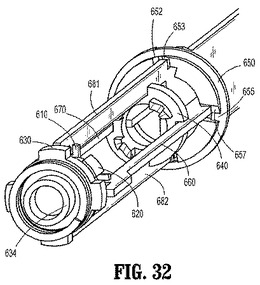
【図33】
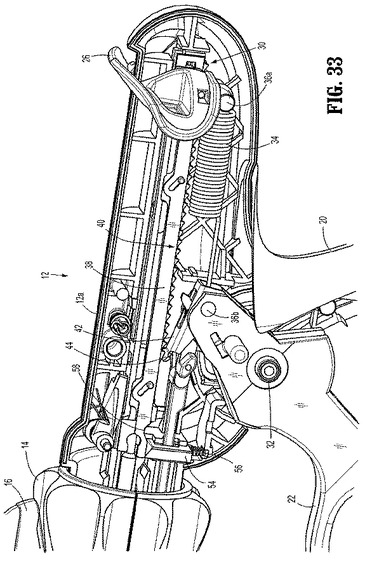
【図34】
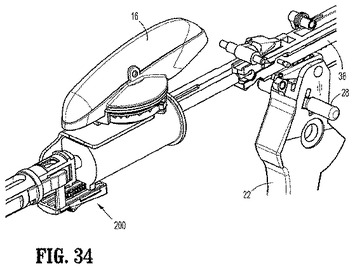
【図35】
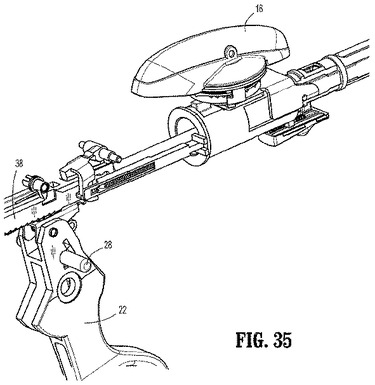
【図36】
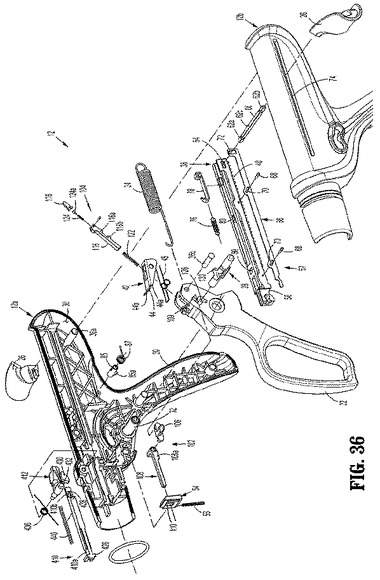
【図37】
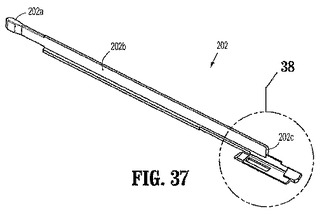
【図38】
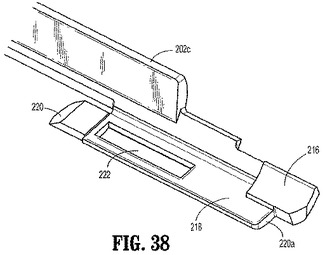
【図39】
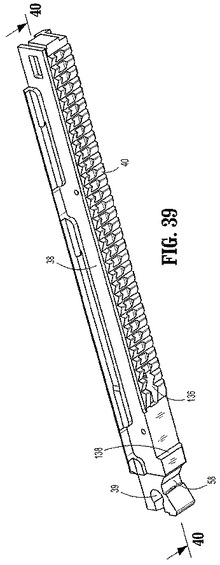
【図40】
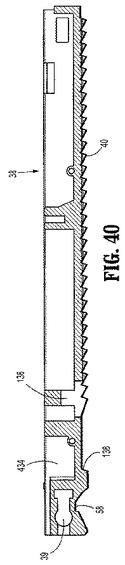
【図41】
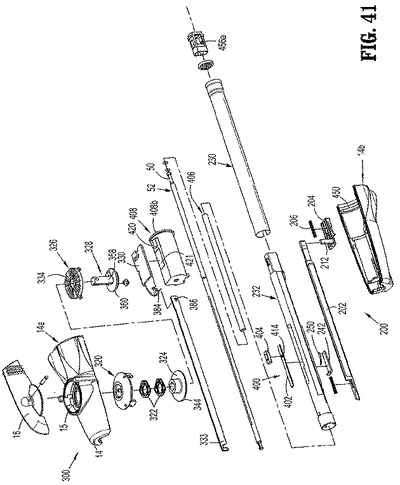
【図42】
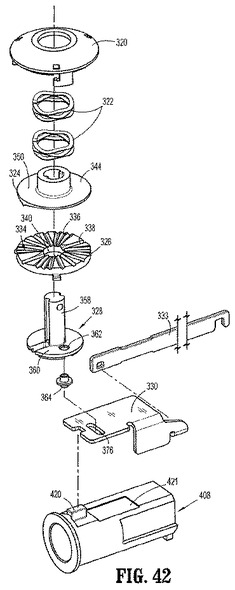
【図43】
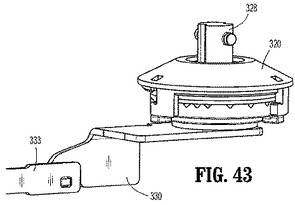
【図44】
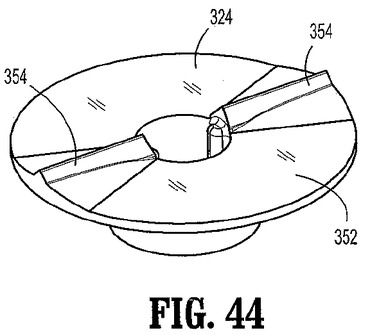
【図45】
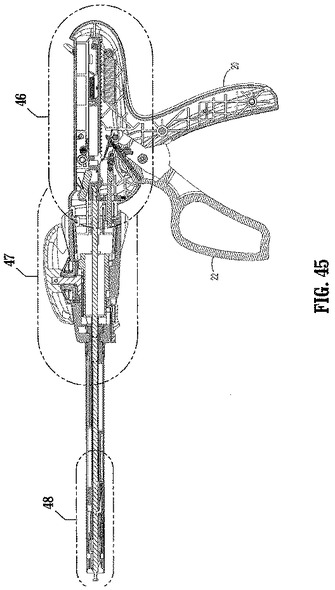
【図46】
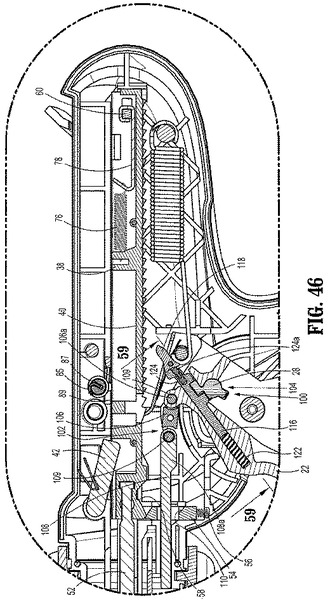
【図47】
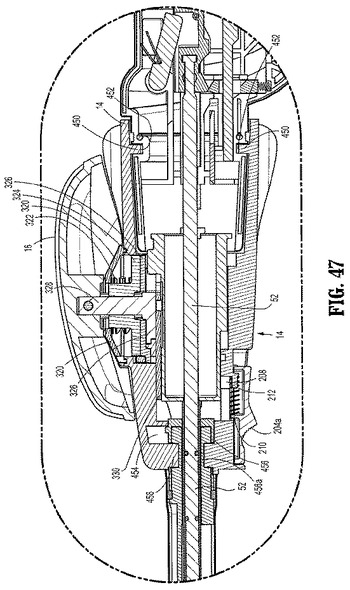
【図48】
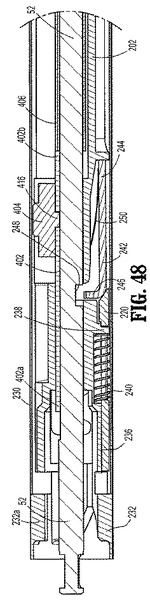
【図49】
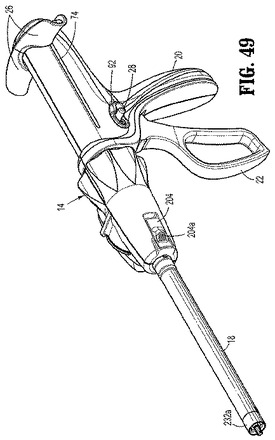
【図50】
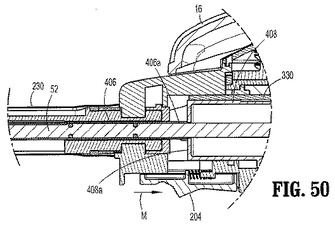
【図51】
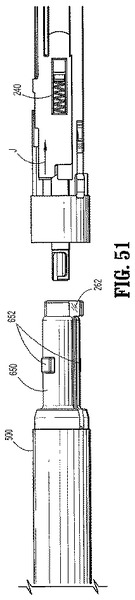
【図52】
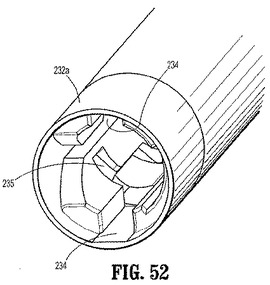
【図53】
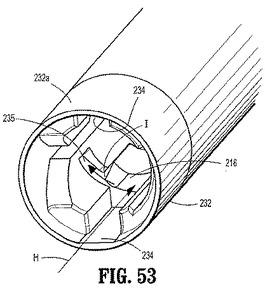
【図54】
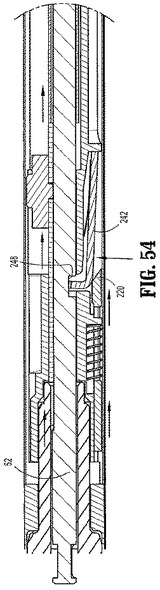
【図55】
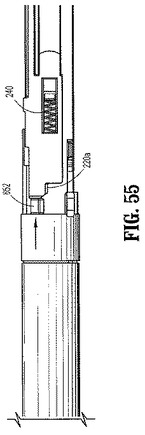
【図56】
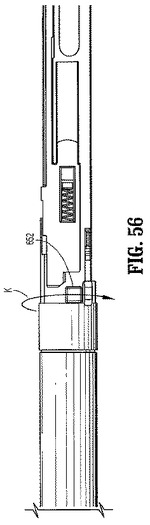
【図57】
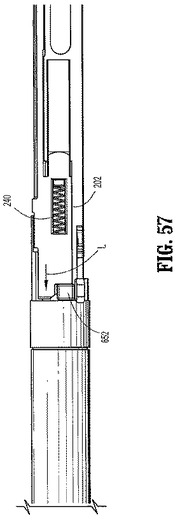
【図58】
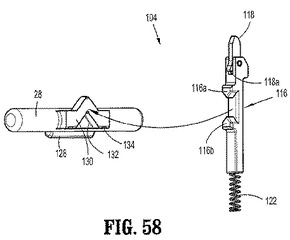
【図59】
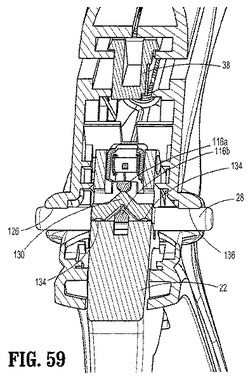
【図60】
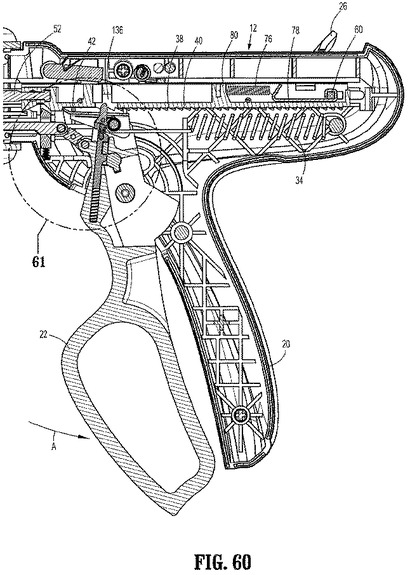
【図61】
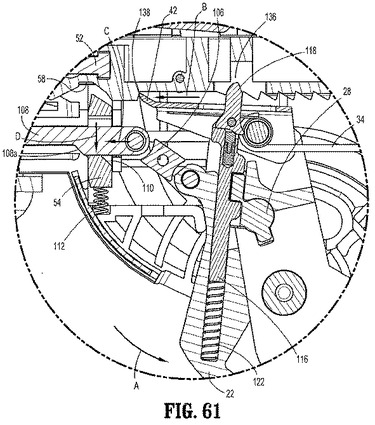
【図62】
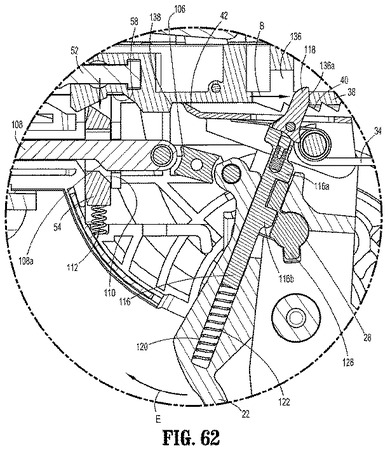
【図63】
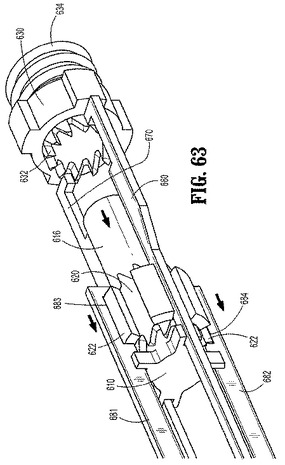
【図64】
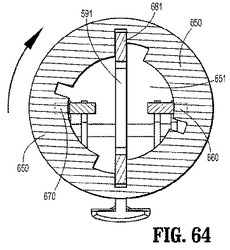
【図65】
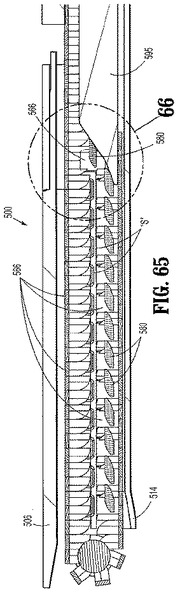
【図66】
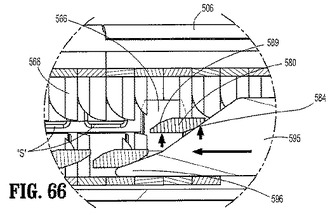
【図67】
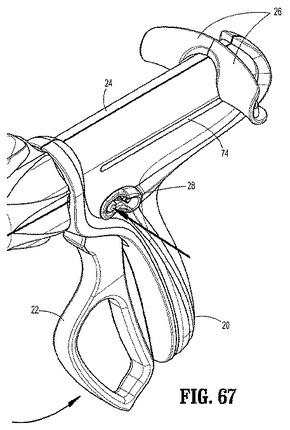
【図68】
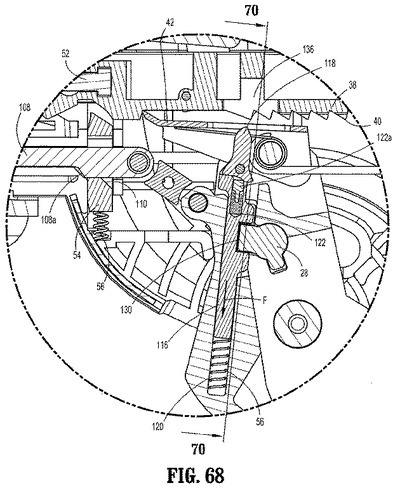
【図69】
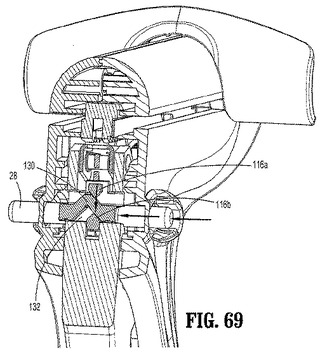
【図70】
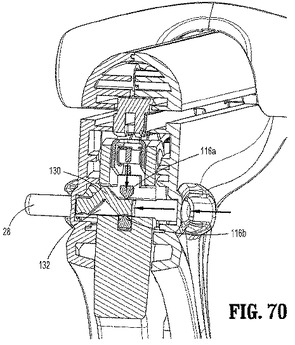
【図71】
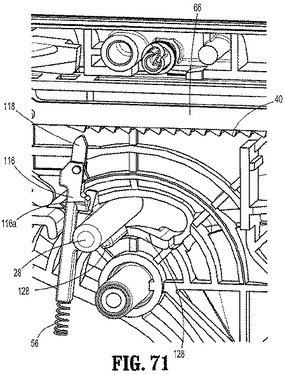
【図72】
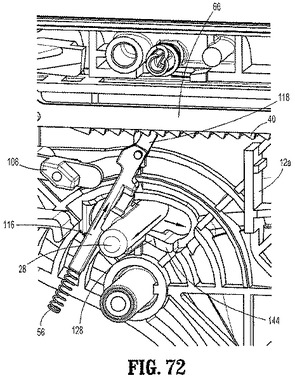
【図73】
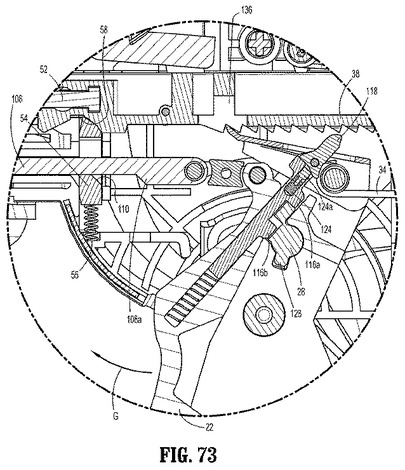
【図74】
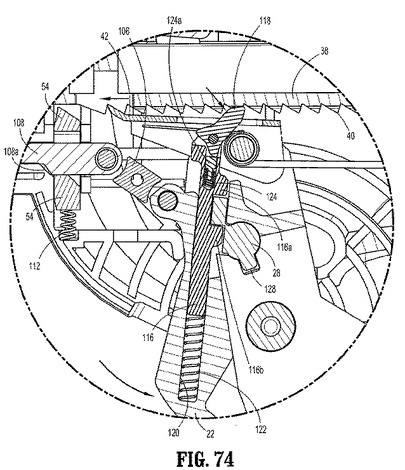
【図75】
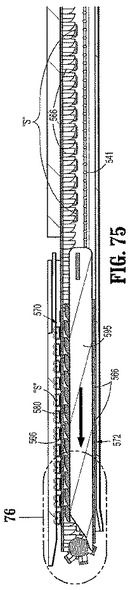
【図76】
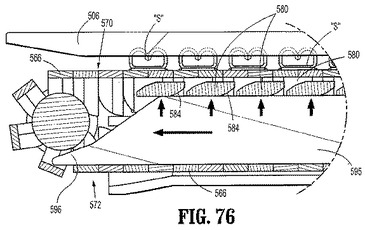
【図77】

【図78】
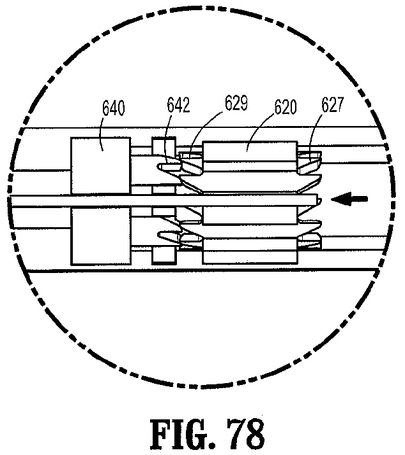
【図79】
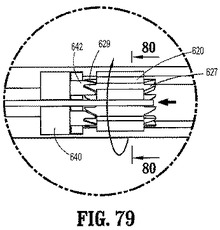
【図80】
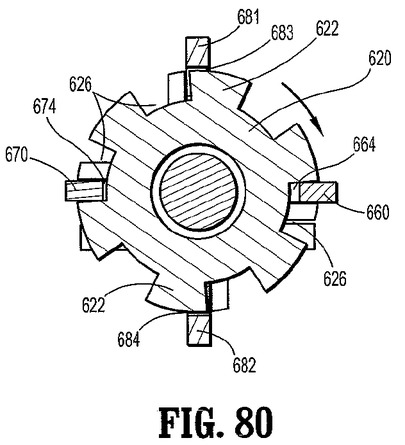
【図81】
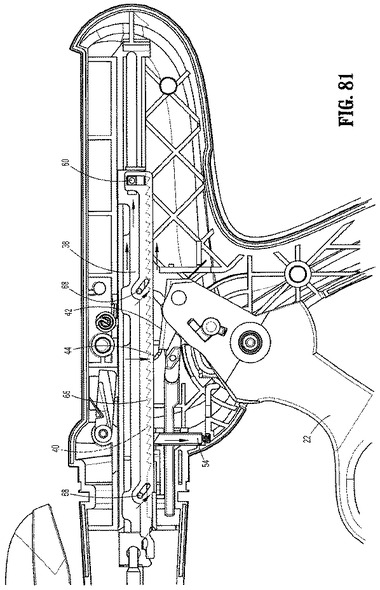
【図82】

【図83】
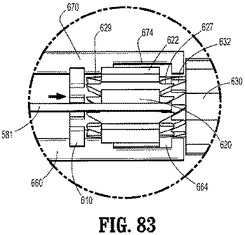
【図84】
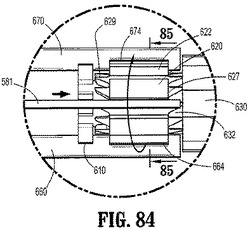
【図85】
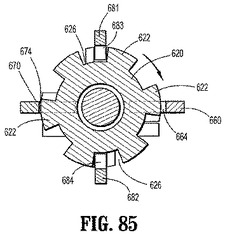
【図86】
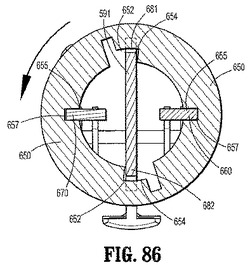
【図87】
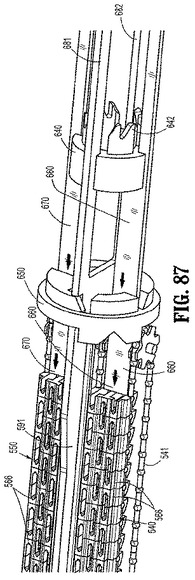
【図88】
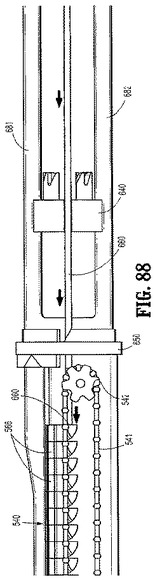
【図89】
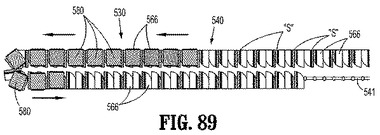
【図90】
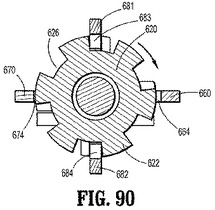
【図91】
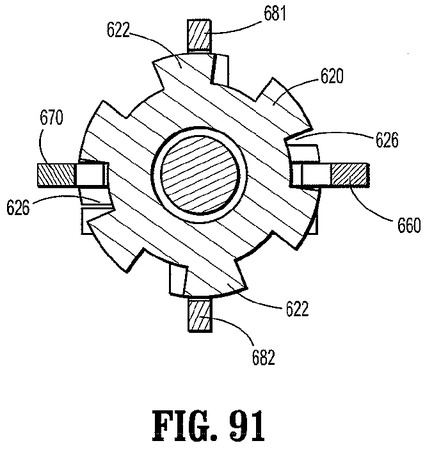
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図14A】
【図15】
【図16】
【図17】
【図18】
【図18A】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【図51】
【図52】
【図53】
【図54】
【図55】
【図56】
【図57】
【図58】
【図59】
【図60】
【図61】
【図62】
【図63】
【図64】
【図65】
【図66】
【図67】
【図68】
【図69】
【図70】
【図71】
【図72】
【図73】
【図74】
【図75】
【図76】
【図77】
【図78】
【図79】
【図80】
【図81】
【図82】
【図83】
【図84】
【図85】
【図86】
【図87】
【図88】
【図89】
【図90】
【図91】
【公開番号】特開2013−85951(P2013−85951A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2012−212813(P2012−212813)
【出願日】平成24年9月26日(2012.9.26)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成24年9月26日(2012.9.26)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]