
太陽電池モジュールの製造装置
【課題】太陽電池セルに損傷を与えることなく、太陽電池セルをステージ上に搬送し配列することができる太陽電池モジュールの製造装置を提供する。
【解決手段】 太陽電池セルを載置するステージと、
前記太陽電池セルを搬送し、前記ステージ上に載置するベルトコンベアユニットと、を備える太陽電池モジュールの製造装置であって、前記ベルトコンベアユニットは、ステージ上で進退移動可能なセル保持部と、固定プーリーと、この固定プーリーに対して接離する方向に移動可能な可動プーリーと、これら固定プーリーと可動プーリーとに架け渡されるエンドレスベルトの余長を調節する余長調節部とを有しており、前記可動プーリーが前進移動及び後退移動する場合に、エンドレスベルトの走行を一方向のみに規制するベルト走行規制機構をさらに備える構成とする。
【解決手段】 太陽電池セルを載置するステージと、
前記太陽電池セルを搬送し、前記ステージ上に載置するベルトコンベアユニットと、を備える太陽電池モジュールの製造装置であって、前記ベルトコンベアユニットは、ステージ上で進退移動可能なセル保持部と、固定プーリーと、この固定プーリーに対して接離する方向に移動可能な可動プーリーと、これら固定プーリーと可動プーリーとに架け渡されるエンドレスベルトの余長を調節する余長調節部とを有しており、前記可動プーリーが前進移動及び後退移動する場合に、エンドレスベルトの走行を一方向のみに規制するベルト走行規制機構をさらに備える構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、太陽電池用のセルを複数枚並べて接続した太陽電池モジュールを製造するための製造装置に関する。
【背景技術】
【0002】
太陽電池モジュールとして、細長い太陽電池用のセルを複数枚並べて接続したスラット構造のものが知られており(例えば、特許文献1参照)、この太陽電池モジュールは、例えば、以下のようにして製造される。
【0003】
帯状である金属材料の上に光電変換層等の各種製膜を行った後、所定長さに切断し、細長い太陽電池用のセル(太陽電池セル)を得る。そして、この太陽電池セルを複数枚、隣り合う太陽電池セルの長辺側の縁部同士が重なるようにしてステージ上に並べ、重ね合わせた縁部同士を接合し、1枚の太陽電池モジュールとしている。このようにして製造された太陽電池モジュールは、複数枚の太陽電池セルが電気的に直列接続された状態となり、実用的な電圧を得ることができる。
【0004】
このように太陽電池セルをステージ上に配置する方法として、ピック&プレイスが用いられる。すなわち、吸着ヘッドにより太陽電池セルの上面を吸着した後、吸着ヘッドをステージ上に移動させ、太陽電池セルが所定の位置に位置した状態で吸着ヘッドを下降させ、吸着を解放する。これにより、複数枚の太陽電池セルが縁部同士を重ね合わせた状態で配置され、縁部同士が接合されることにより、太陽電池モジュールが形成される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2010/023264号
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、上記ピック&プレイスでは、太陽電池セルの上面を吸着するため、太陽電池セルに損傷を与える虞がある。すなわち、太陽電池セルの上面には、光電変換層等の各種製膜が形成されているため、その上面を吸着することにより製膜層の吸着部分が損傷を受け、その結果、太陽電池セルが所定の起電力を得ることができない等の問題が発生する虞があった。
【0007】
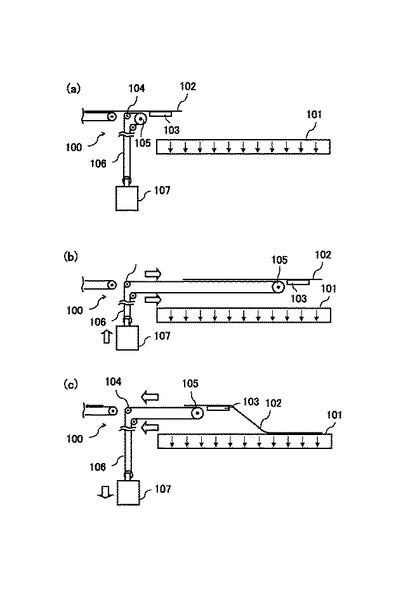
また、図7に示すように、ベルトコンベア100によりステージ101に搬送し、載置する方法が考えられる。すなわち、太陽電池セル102の端部を保持するセル保持部103と、固定プーリー104と、この固定プーリー104に対して接離する方向に移動可能な可動プーリー105と、これら固定プーリー104と可動プーリー105とに架け渡されるエンドレスベルト106の弛みを抑えるバランスウエイト107とを有しており、セル保持部103と可動プーリー105とがステージ101上を移動することにより太陽電池セル102が配列される。具体的には、可動プーリー105が固定プーリー104側に配置された状態で太陽電池セル102がエンドレスベルト106上に配置されるとともに、太陽電池セル102の端部がセル保持部103により保持される(図7(a))。そして、セル保持部103と可動プーリー105とが一体となって固定プーリー104から離れる方向に移動することにより、バランスウエイト107が持ち上げられつつエンドレスベルト106が繰り出され、太陽電池セル102がステージ101上の所定位置まで搬送される(図7(b))。なお、図中の矢印はエンドレスベルト106の走行方向を示している。太陽電池セル102の端部がステージ101に載置されると、セル保持部103と可動プーリー105とが元の位置、すなわち、バランスウエイト107の自重を利用して固定プーリー104側に移動する(図7(c))。これにより、可動プーリー105は、固定プーリー104との間に位置するエンドレスベルト106が弛むことなく移動することができる。
【0008】
しかしながら、上記ベルトコンベア100の構成では、太陽電池セル102の表面は非接触で搬送できるものの、太陽電池セル102の裏面は損傷を受ける虞がある。すなわち、太陽電池セル102は、エンドレスベルト106上に載置されているため、セル保持部103の動きと、エンドレスベルト106との動きが一致しなければ太陽電池セル102の裏面が擦れて損傷を受けてしまう。ところが、太陽電池セル102の端部をステージ101に載置した後、可動プーリー105が固定プーリー104側に移動する際、太陽電池セル102は停止しているにもかかわらず、エンドレスベルト106は可動プーリー105とともに固定プーリー104側に走行する(図7(c))。その結果、太陽電池セル102の裏面とエンドレスベルト106とに摩擦が生じ、太陽電池セル102の裏面に設けられた他の太陽電池セル102と接合する接合材が摩耗して損傷を受ける。そして、接合材の摩耗は、パーティクルとなって浮遊し、太陽電池セル102同士の接合環境に影響を与えることも考えられる。
【0009】
本発明は、上記問題点に鑑みてなされたものであり、太陽電池セルに損傷を与えることなく、太陽電池セルをステージ上に搬送し配列することができる太陽電池モジュールの製造装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
上記課題を解決するために本発明の太陽電池モジュールの製造装置は、太陽電池セルを載置するステージと、前記太陽電池セルを搬送し、前記ステージ上に載置するベルトコンベアユニットと、を備え、前記ベルトコンベアユニットにより搬送された複数枚の太陽電池用セルの縁部同士が上下に重なるようにして前記ステージ上で配列されて形成される太陽電池モジュールの製造装置であって、前記ベルトコンベアユニットは、太陽電池セルの端部を保持するとともにステージ上で進退移動可能なセル保持部と、固定プーリーと、この固定プーリーに対して接離する方向に移動可能な可動プーリーと、これら固定プーリーと可動プーリーとに架け渡されるエンドレスベルトの余長を調節する余長調節部とを有しており、前記セル保持部の前進移動に伴って前記可動プーリーが固定プーリー側からステージ側に前進移動して余長調節部からエンドレスベルトが繰り出されるとともに、前記セル保持部の後退移動に伴って可動プーリーが固定プーリー側に後退移動し余長調節部にエンドレスベルトが収容され、前記可動プーリーが前進移動及び後退移動する場合に、エンドレスベルトの走行を一方向のみに規制するベルト走行規制機構をさらに備えることを特徴としている。
【0011】
上記太陽電池モジュールの製造装置によれば、太陽電池セルがベルトコンベアユニットにより搬送されステージ上に載置されるため、太陽電池セルの表面に接触することなくステージ上の所定位置に太陽電池セルを配置することができる。また、可動プーリーの前進移動及び後退移動の際、ベルト走行規制機構によりエンドレスベルトの走行が一方向のみに規制されるため、太陽電池セルの裏面に損傷を与えることなく太陽電池セルを搬送及び載置することができる。具体的には、エンドレスベルトは、ベルト走行規制機構により、太陽電池セルを載置する部分から可動プーリーで折り返して余長調節部に戻る方向、すなわち、順方向のみに規制されている。ここで、エンドレスベルトにおいて、太陽電池セルを載置する部分をセル載置部分、可動プーリーで折り返した後の部分を返り部分と呼ぶことにする。この場合において、エンドレスベルトに載置された太陽電池セルをセル保持部で保持し、セル保持部と可動プーリーが前進移動すると、可動プーリーと固定プーリーとの移動に合わせて余長調節部からエンドレスベルトが繰り出される。このとき、ベルト走行規制機構によりエンドレスベルトが順方向のみに走行規制されるため、エンドレスベルトは、セル載置部分に供給されるが返り部分には供給されることはない。具体的には、可動プーリーの前進移動とともに、セル載置部分は順方向にエンドレスベルトが走行し、返り部分には可動プーリーを折り返したエンドレスベルトが供給されるだけで、実際の返り部分は停止したままである。このように、セル載置部分は、順方向に走行することにより、セル保持部と可動プーリーとの移動を同調させることができ、太陽電池セルの裏面とエンドレスベルトとが擦れる問題を回避することができる。
【0012】
また、太陽電池セルをステージに搬送し太陽電池セルの端部をステージに載置した後、セル保持部と可動プーリーとが元の位置、すなわち、固定プーリー側に移動する。このとき、セル載置部分と返り部分とに弛みが生じようとするが、ベルト走行規制機構によりエンドレスベルトが順方向のみに走行規制されているため、可動プーリーが固定プーリーに近づくに従って、返り部分のエンドレスベルトは余長調節部に収容されるが、セル載置部分のエンドレスベルトは余長調節部に収容されることはない。すなわち、可動プーリーの後退移動とともに発生するエンドレスベルトの余長部分は、エンドレスベルトの返り部分が順方向に走行することにより余長調節部に引き取られ、セル載置部分は可動プーリーの移動に伴って可動プーリーで折返して返り部分側に引き取られる。すなわち、実際のセル載置部分は走行せず停止したままである。これにより、ステージに端部が吸着される太陽電池セルと、エンドレスベルト(セル載置部分)とは、共に停止しているため、太陽電池セルの裏面とエンドレスベルトとが擦れる問題を回避することができる。
【0013】
このようにして、太陽電池セルの表面及び裏面についても損傷を与えることなく、ステージ上に搬送し配列することができる。
【0014】
また、具体的な様態としては、前記余長調節部は、主アーム部と、主アーム部に接離可能に変位する副アーム部とを有しており、主アーム部と副アーム部との間隔が調節されることにより、前記エンドレスベルトの繰出し動作及び収容動作が行われ、前記ベルト走行規制機構は、一方向のみの回転が許容されるクラッチ部が、エンドレスベルトにおける太陽電セルが載置される部分とエンドレスベルトが収容される部分との間、及び、エンドレスベルトにおける太陽電池セルが載置される側の裏面と対向する部分とエンドレスベルトが収容される部分との間にそれぞれエンドレスベルトに当接して設けられており、可動プーリーが前進移動する場合には、太陽電池セルが載置される側に前記余長調節部からエンドレスベルトが繰り出され、可動プーリーが後退移動する場合には、太陽電池セルが載置される側の裏面と対向する側のエンドレスベルトが前記余長調節部に収容される構成にすることができる。
【発明の効果】
【0015】
本発明の太陽電池モジュールの製造装置によれば、太陽電池セルに損傷を与えることなく、太陽電池セルをステージ上に搬送し配列することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の製造装置の概略構成及びその動作を示す側面図である。
【図2】本発明の製造装置の概略構成及びその動作を示す側面図である。
【図3】本発明の製造装置の概略構成を示す平面図である。
【図4】押さえ部材の説明図であり、下方へ揺動させた状態にあるヘッドを進退方向に見た図である。
【図5】太陽電池モジュールの説明図である。
【図6】余長調節部の説明図である。
【図7】従来技術におけるベルトコンベアユニットを用いた例を説明するための図である。
【発明を実施するための形態】
【0017】
本発明の太陽電池モジュールの製造装置に係る実施の形態を図面を用いて説明する。
【0018】
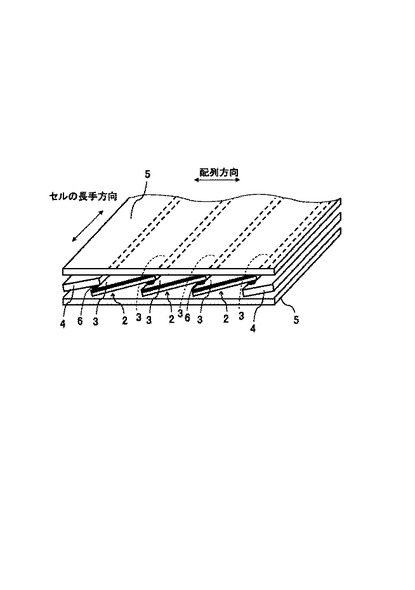
図1と図2は、本発明の太陽電池モジュールの製造装置1の概略構成及びその動作を示す側面図である。図3はこの製造装置1の平面図である。この製造装置1を含む製造システム(製造ライン)によって製造される太陽電池モジュール(以下、モジュールともいう)は、図5に示しているように、複数枚の細長い太陽電池用のセル2(太陽電池セル2。以下単にセル2ともいう)を並べて備えており、これら複数のセル2の両側に電極4が設けられている。セル2は短冊形状であり、セル2の長手方向と、セル2が並べられるセル2の配列方向とは直交している。なお、図5では、説明を容易とするためにセル2を3枚のみとしているが、実際のモジュールでは、3枚よりも多いセル2を備えている。
【0019】
これらセル2及び電極4は、その両面からカバー部材5によって挟まれており、モジュールは一体のシート状を成している。カバー部材5は、可撓性を有し太陽光を透過させるフィルム状の樹脂部材から成り、セル2及び電極4の表面及び裏面に密着している。なお、図5では、カバー部材5をセル2から離した状態としている。
【0020】
配列方向で隣り合うセル2,2の縁部3,3同士は、接合金属を介して上下重ね合わされた状態にあり、当該接合金属によって、セル2,2は重ね合わされた縁部3,3において電気的及び構造的に接続されている。接合金属は、例えば半田6から成り、半田6は、セル2の縁部3に沿ってセル2の長手方向に沿って点在して設けられている。
【0021】
このようなモジュールは、まず、帯状である金属材料の上に光電変換層等の各種製膜を行った後、これを所定長さに切断し、複数枚の細長いセル2を得る。そして、ステージ10上で、これらセル2を、隣り合うセル2,2の長辺側の縁部3,3同士が重なるようにして前記配列方向に順に並べ、これら縁部3,3同士を接合することにより形成される。
【0022】
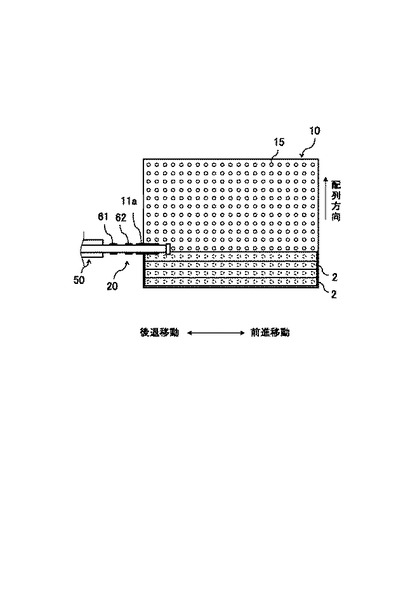
本発明の太陽電池モジュールの製造装置1は、太陽電池セルを載置するステージ10と、前記太陽電池セル2を搬送し、前記ステージ10上に載置するベルトコンベアユニット20とを有しており、ステージ10上において、隣り合うセル2,2の長辺側の縁部3,3同士が上下重なるようにして、前記配列方向にセル2を順に配列させるものである。
【0023】
ステージ10は、図3に示すように、太陽電池セル2を配置するためのものであり、表面10aは平面状に形成されている。このステージ10には、セル2を吸着するための吸引穴15が設けられており、この吸引穴15に吸引力が発生することにより、セル2の裏面がステージ10の表面に吸着される。吸引穴15は、セル2が並ぶ全領域に複数設けられており、(エアの)吸引を行うポンプ(図示せず)と接続されている。そして、このポンプを作動させることにより、全領域において同時に吸引力が発生しセル2を吸着させることができる。すなわち、ステージ10は、その表面10aに既に載っているセル2及びこれから載せるセル2を吸着して拘束することができる。また、ステージ10は、1枚のセル2が載せられる毎に、セル2の配列方向に、セル2の短手方向寸法に相当する1ピッチ、移動することができるようになっている。
【0024】
ベルトコンベアユニット20は、セル2を1枚ずつステージ10に搬送し、載置するためのものである。このベルトコンベアユニット20は、セル2を保持するセル保持部21と、搬送の際にセル2を載置するコンベア部22と、エンドレスベルト30の余長を調節する余長調節部40(図6参照)とを有している。
【0025】
コンベア部22は、セル2をステージ10まで搬送する際、セル2全体を載置することでセル2の姿勢を維持するものであり、固定プーリー61と、可動プーリー62とを有しており、これらに固定プーリー61及び可動プーリー62にエンドレスベルト30が架け渡されている。
【0026】
固定プーリー61は、製膜処理が行われたセル2を搬送する搬送装置50に対し固定的に設けられている。具体的には、固定プーリー61は、搬送装置50のベルトの高さ位置が、固定プーリー61に架け渡されるエンドレスベルト30の高さ位置と共通の高さ位置になる位置に固定されている。これにより、搬送装置50により搬送されたセル2がスムーズにコンベア部22に乗り換えできるようになっている。
【0027】
可動プーリー62は、固定プーリー61に対して接離する方向に移動可能に構成されており、固定プーリー61から離れる方向に移動することにより、セル2をステージ10まで搬送することができる。具体的には、可動プーリー62は、セル保持部21と一体となって移動できるように構成されており、セル2をステージ10に載置する場合には、セル保持部21とともに固定プーリー61から離れる側に移動し、セル2がステージ10に載置されると、セル保持部21と共に固定プーリー61側に移動できるようになっている。この可動プーリー62の高さ位置は、可動プーリー62に架け渡されるエンドレスベルト30の高さ位置が固定プーリー61に架け渡されるエンドレスベルト30の高さ位置になるように配置されている。したがって、可動プーリー62と固定プーリー61との間に位置するエンドレスベルト30(セル載置部分31(図2(c)参照))にセル2が載置された状態では、セル2がほぼ水平状態を保つ姿勢で保持されるようになっている。なお、セル載置部分31の裏面と対向するエンドレスベルト30を便宜上、返り部分32と呼ぶことにする。
【0028】
セル保持部21は、コンベア部22に載置されたセル2を保持しつつ、ステージ10の所定の位置まで先導するものである。セル保持部21は、セル2を吸着保持する吸着プレート11aと、この吸着プレート11aが取付けられるヘッド部7とを有している。
【0029】
吸着プレート11aは、平板状部材であり、表面には複数の吸着孔が形成されている。この吸着孔には、吸引ポンプ(不図示)が接続されており、吸引ポンプを作動させることにより吸着孔に吸引力を発生させることができる。したがって、吸着プレート11aにセル2が載置された状態で吸引ポンプを作動させることにより、セル2の裏面を吸着プレート11aに吸着保持することができるようになっている。これにより、セル2の表面に損傷を与えることなくセル2を保持することができる。
【0030】
ヘッド部7には、駆動機構(不図示)が設けられており、この駆動機構により吸着プレート11aを待機位置P1と、セル供給位置P2とに移動させることができる。また、本実施形態では、ヘッド部7には、可動プーリー62が連結されており、この駆動機構を動作させることにより吸着プレート11aと可動プーリー62とが共に同調して移動できるようになっている。ここで、待機位置P1とは、可動プーリー62が固定プーリー61に近接する位置であり、セル供給位置P2とは、可動プーリー62が固定プーリー61から離れてステージ10にセル2を配置する位置である。すなわち、このヘッド部7の移動により、可動プーリー62及び吸着プレート11aを前進後退移動させることができ、前進後退移動を繰り返すことにより、搬送装置50から受け渡されたセル2を1枚ずつステージ10の表面に供給できるようになっている。なお、前進移動とは、可動プーリー62又は吸着プレート11aが待機位置P1からセル供給位置P2に移動することであり、後退移動とは、可動プーリー62又は吸着プレート11aがセル供給位置P2から待機位置P1に移動することをいう。
【0031】
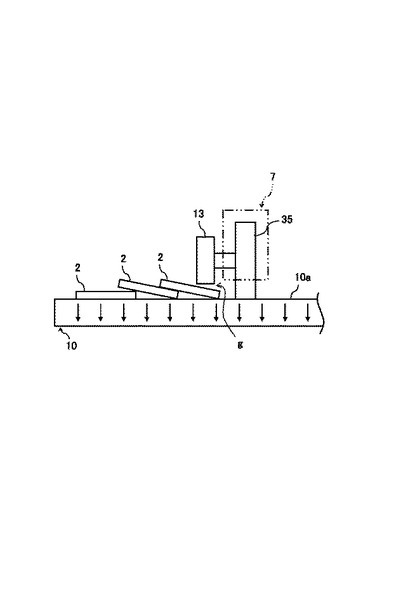
また、ヘッド部7には、揺動機構が設けられている。この揺動機構により、搬送されるセル2の一部をステージ10の表面に載置させることができるようになっている。具体的には、揺動機構は、伸縮アクチュエータの先端に設けられた減速機付モータ(不図示)を有しており、このモータの出力軸にヘッド部7が固定されることにより構成されている。そして、出力軸を制御することにより、図1(c)に示すように、軸C1を中心に吸着プレートが水平状態である搬送姿勢(図1(c)の状態)と、吸着プレートが下方に傾く載置姿勢(図2(a)の状態)とに姿勢変化できるようになっている。すなわち、搬送姿勢でセル2を吸着プレート11aから少し延長した状態で吸着し、ステージ10のセル供給位置P2においてヘッド部7を載置姿勢に変化させることにより、セル2の延長部分をステージ10の表面に載置することができる。そして、セル2の延長部分がステージ10に載置されると、ステージ10の吸着穴によりセル2の延長部分が吸着保持される。
【0032】
また、ヘッド部7には、押さえ部材13が設けられている。この押さえ部材13は、ステージ10に載置されたセル2の浮き上がりを防止するためのものである。押さえ部材13は、ローラで構成されており、その外周部分は、例えばスポンジ等の柔軟な素材で形成されている。ここで、図4は、押さえ部材13の説明図であり、揺動機構によって載置姿勢にあるヘッド部7を進退方向に見た図である。ヘッド部7には、ステージ10上を転がるガイドローラ35が設けられており、ガイドローラ35は、押さえ部材13よりも半径が大きく、また、ガイドローラ35の回転中心と、押さえ部材13の回転中心とは一致している。そして、ヘッド部7が載置姿勢の状態で、ガイドローラ35がステージ10の表面に接地すると、押さえ部材13と、理想的な状態でステージ10に載ったセル2の上面との間には、僅かな隙間gが形成される。すなわち、ガイドローラ35の半径は、押さえ部材13の半径と、セル2の厚さと、前記隙間gとの和に設定されている。
【0033】
したがって、図2(a)〜(c)に示すように、ヘッド部7が載置姿勢の状態で、ヘッド部7をセル供給位置P2から待機位置P1に後退させると、ガイドローラ35はステージ10上を転がって移動し、この際、ガイドローラ35は、押さえ部材(押さえローラ)13を、一定の高さ位置に維持することができる。すなわち、押さえ部材13は、ステージ10上に吸着されていくセル2の上を走行させることができる。
【0034】
この押さえ部材13によれば、ステージ10上に吸着したセル2の一部に浮き上がる部分が存在する場合であっても、ヘッド部7を後退させる際に、当該セル2の上を通過することにより、セル2の浮き上がり部分に当接して、当該浮き上がり部分をステージ10側へ押さえることができる。
【0035】
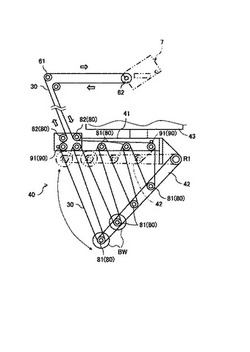
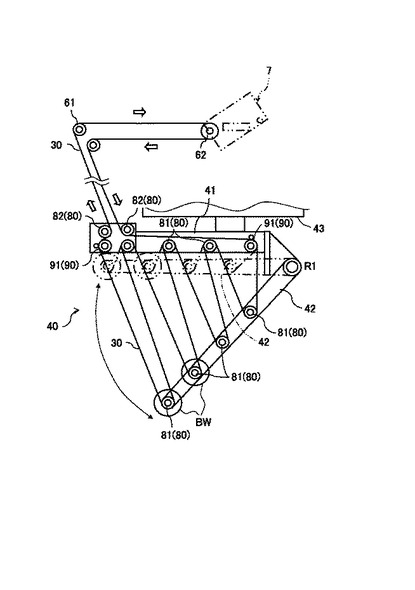
余長調節部40は、エンドレスベルト30の余長を調節するものである。すなわち、可動プーリー62が待機位置P1とセル供給位置P2との間を移動することにより、固定プーリー61と可動プーリー62との間に必要なエンドレスベルト30の長さが変化する。余長調節部40は、必要なエンドレスベルト30の長さに応じてエンドレスベルト30の繰出し及び収容を行うことにより余長を調節する。余長調節部40は、図6に示すように、本装置のフレーム43に取付けられる主アーム部41と、この主アーム部41に対して接離可能な副アーム部42とを備えており、これら主アーム部41と副アーム部42とにエンドレスベルト30が架け渡されている。
【0036】
主アーム部41は、平板状部材で形成されており、本装置のフレーム43に固定されている。主アーム部41には複数のコロ80が設けられている。これらのコロ80は、主アーム部41の延びる方向に沿って一列に配置されるダンサーコロ81と、ベルトの走行方向を変更する変更コロ82とを有している。
【0037】
また、副アーム部42は、平板状部材で形成されており、一方端において、主アーム部41と共に回転軸R1において回転可能に取付けられている。これにより、副アーム部42は、主アーム部41に対して回転軸R1を中心に接離可能に動くことができる。すなわち、副アーム部42は、回転軸R1を中心に回動することにより、副アーム部42が主アーム部41に最も接近する閉状態(副アーム部42は2点鎖線で示す。)と、主アーム部41から最も離れる開状態に変位することができる。
【0038】
また、副アーム部42には、ダンサーコロ81が副アーム部42の延びる方向に沿って一列に配列されて設けられている。このダンサーコロ81が配置される間隔は、主アーム部41のダンサーコロ81が配置される間隔とほぼ同じに設定されており、副アーム部42が主アーム部41に接近した状態(2点鎖線で示す状態)では、主アーム部41のダンサーコロ81の間に副アーム部42のダンサーコロ81が配置されるように設けられている。すなわち、副アーム部42が主アーム部41に接近した状態では、副アーム部42及び主アーム部41のダンサーコロ81が互いに千鳥状に配列された状態になっている。
【0039】
このような主アーム部41及び副アーム部42にエンドレスベルト30が架け渡されている。具体的には、コンベア部22から戻るエンドレスベルト30が変更コロ82により向きが変更され、主アーム部41の最も回転軸R1に近いダンサーコロ81に架け渡される。次に、副アーム部42のダンサーコロ81に架け渡され、次に主アーム部41のダンサーコロ81に架け渡されるというように、主アーム部41のダンサーコロ81と副アーム部42のダンサーコロ81に交互に架け渡され、最後に主アーム部41の変更コロ82に架け渡されてコンベア部22に繰り出される。
【0040】
そして、副アーム部42を回動させて開状態、閉状態にすることにより、主アーム部41と副アーム部42との間にエンドレスベルト30が収容され、コンベア部22におけるエンドレスベルト30の余長を調節することができる。また、副アーム部42のダンサーコロ81と同軸にバランスウエイトBWが取付けられている。このバランスウエイトBWにより、エンドレスベルト30の張力が緩和されると、閉状態の副アーム部42が回動しスムーズに開状態に変化することができる。
【0041】
具体的には、ヘッド部7の駆動機構により可動プーリー62が前進移動すると、可動プーリー62が固定プーリー61から離れる分だけ余長調節部40からエンドレスベルト30が繰り出される。すなわち、可動プーリー62の前進移動に伴ってエンドレスベルト30が引張られることにより、副アーム部42が主アーム部41側に移動する。すなわち、主アーム部41と副アーム部42とが閉状態になる。これにより、主アーム部41と副アーム部42との距離が小さくなることにより余長調節部40におけるエンドレスベルト30の収容量が少なくなり、主アーム部41と副アーム部42との間に収容していたエンドレスベルト30がコンベア部22側に繰り出される。これにより、可動プーリー62はスムーズに前進移動することができる。また、ヘッド部7の駆動機構により可動プーリー62が後退移動すると、可動プーリー62が固定プーリー61に近づくことにより、可動プーリー62と固定プーリー61との間にエンドレスベルト30の余長が発生しエンドレスベルト30の張力が解放される。このとき、副アーム部42は、バランスウエイトBWの自重により、閉状態から開状態に移動し、可動プーリー62と固定プーリー61との間に発生する余長分が、主アーム部41と副アーム部42との間に収容される。従って、可動プーリー62の後退移動によりエンドレスベルト30が弛むのを抑えることができるようになっている。
【0042】
また、本実施形態では、余長調節部40にベルト走行規制機構90が設けられている。このベルト走行規制機構90は、エンドレスベルト30が走行する向きを一方向のみに規制するものである。ベルト走行規制機構90は、クラッチ部を有しており、このクラッチ部がセル載置部分31とエンドレスベルト30が収容される部分との間、及び、返り部分32とエンドレスベルト30が収容される部分との間にそれぞれエンドレスベルト30に当接して設けられている。
【0043】
本実施形態では、主アーム部41の両端に位置するダンサーコロ81が、クラッチ機構を有するクラッチ付コロ91(本発明のクラッチ部)であり、一方向のみに回転するようになっている(ワンウェイクラッチ)。そして、これらのクラッチ付コロ91は、右回り(時計回り)にのみ回転するように構成されている。すなわち、主アーム部41の先端部分に位置するクラッチ付コロ91について見ると、エンドレスベルト30がコンベア部22に繰り出す方向に走行する場合は、クラッチ付コロ91は右回りに回転することになるため、エンドレスベルト30はスムーズに繰り出される。しかし、コンベア部22から余長調節部40に収容する方向に走行しようとすると、クラッチ付コロ91が左回りに回転することになるため、エンドレスベルト30が収容される方向に走行することはできない。一方、主アーム部41の回転軸R1側のクラッチ付コロ91について見ると、エンドレスベルト30がコンベア部22から収容される方向に走行する場合には、クラッチ付コロ91は右回りに回転することになるため、エンドレスベルト30はスムーズに収容される。しかし、余長調節部40からコンベア部22に繰り出す方向に走行しようとすると、クラッチ付コロ91が左回りに回転することになるため、エンドレスベルト30が繰り出される方向に走行することはできない。したがって、これらのクラッチ付コロ91(クラッチ部)により、エンドレスベルト30は、余長調節部40からセル載置部分31に繰り出され、可動プーリー62で折返し、返り部分32を経て余長調節部40に戻ってくるという一方向のみ(図6における矢印の向きのみ)の走行に規制される。
【0044】
次に、本実施形態における太陽電池モジュールの製造装置の動作について図1、図2を用いて説明する。
【0045】
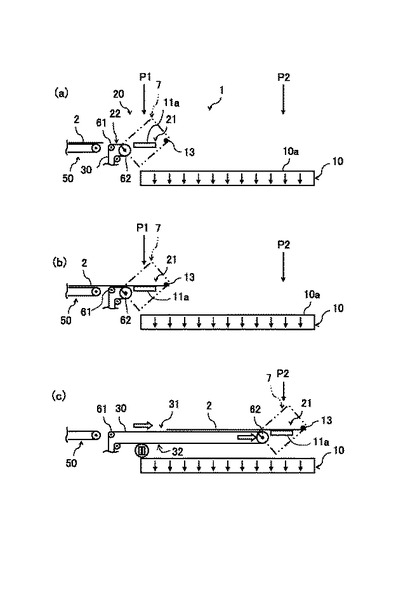
まず、図1(a)に示すように、ステージ10に配置すべセル2が搬送装置50により搬送されると、待機位置P1で待機しているコンベア部22にセル2の乗り換えが行われる。その際、ヘッド部7は、搬送姿勢になっている。
【0046】
次に、図1(b)に示すように、搬送装置50によりセル2が吸着プレート11aから延長部分を形成した所定位置まで搬送され、その位置で吸着プレート11aにより吸着保持される。
【0047】
次に、図1(c)に示すように、セル2をステージ10上まで移動させる。具体的には、ヘッド部7を前進移動させて吸着プレート11aがセル供給位置P2まで移動させる。このヘッド部7の移動により可動プーリー62も前進移動する。このとき、可動プーリー62の前進移動することにより、エンドレスベルト30のセル載置部分31及び返り部分32共に前進方向側に引張られる。すなわち、主アーム部41の先端部におけるクラッチ付コロ91では、エンドレスベルト30が繰り出される側に引張り力を受けるため、クラッチ付コロ91が右回転しエンドレスベルト30がセル載置部分31に繰り出される。一方、主アーム部41の回転軸R1近くのクラッチ付コロ91では、エンドレスベルト30が繰り出される側に引張り力を受けると、クラッチ付コロ91の回転が左回転になるため、クラッチ付コロ91が回転せず、エンドレスベルト30は停止したままになる。したがって、可動プーリー62が前進移動すると、移動した分だけ余長調節部40からセル載置部分31にエンドレスベルト30が繰り出され(図中の”⇒”マークは走行の向きを表す)、返り部分32は可動プーリー62の前進移動に伴ってセル載置部から可動プーリー62で折り返したエンドレスベルト30が次々供給されるだけで実際の走行は停止したままになる(図中の”II”マークは停止の意味を表す)。このとき、セル2は吸着プレート11aに保持されて前進移動するがエンドレスベルト30のセル載置部分31も前進移動方向に走行するため、セル2の裏面が摩擦により損傷を受けることはない。
【0048】
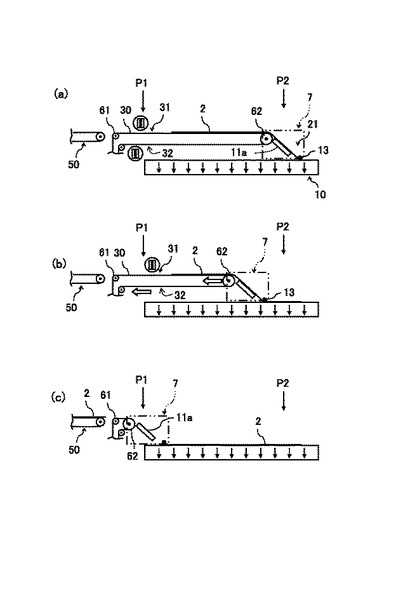
次に、図2(a)に示すように、吸着プレート11aがセル供給位置P2に到達するとヘッド部7が停止する。これに伴い、可動プーリー62の前進移動も停止し、エンドレスベルト30の走行も停止する。そして、ヘッド部7が揺動機構が作動することにより、搬送姿勢から載置姿勢に姿勢変化する。これにより、セル2の延長部分がステージ10の表面に当接するため、その当接部分が吸引穴15により吸引されステージ10に吸着される。
【0049】
次に、図2(b)に示すように、セル2の延長部分が吸着されると吸着プレート11aの吸着が解除され、ヘッド部7がセル供給位置P2から待機位置P1に後退移動する。すなわち、ヘッド部7の後退移動とともに、押さえ部材13がセル2の表面を撫でることによりセル2の浮き上がりを防止しつつセル2をステージ10の表面に確実に吸着保持させる。このヘッド部7の後退移動により可動プーリー62も後退移動する。このとき、可動プーリー62の後退移動により、エンドレスベルト30のセル載置部分31及び返り部分32共に可動プーリー62による引張り力が解放される。エンドレスベルト30の引張り力が解放されると、バランスウエイトBWの自重により副アーム部42が閉状態から開状態になることにより、エンドレスベルト30が副アーム部42により引張られ、余長調節部40でセル載置部分31及び返る部分に生じるエンドレスベルト30の余長が吸収される。
【0050】
すなわち、主アーム部41の回転軸R1近くにクラッチ付コロ91では、エンドレスベルト30が余長調節部40側に引張り力を受けると、クラッチ付コロ91が右回転しエンドレスベルト30が主アーム部41と副アーム部42の間に収容される。一方、主アーム部41の先端部におけるクラッチ付コロ91では、エンドレスベルト30が余長調節部40側に引張り力を受けると、クラッチ付コロ91の回転が左回転になるため、クラッチ付コロ91が回転せず、エンドレスベルト30は停止したままになる。
したがって、可動プーリー62が後退移動すると、返り部分32のエンドレスベルト30は、移動した分だけ余長調節部40に収容される(図中”⇒”マーク)。一方、セル載置部分31のエンドレスベルト30は、余長調節部40に収容されず可動プーリー62の後退移動に伴って、エンドレスベルト30が可動プーリー62で折り返し、返り部分32に次々と供給されるだけで実際には走行せず停止したままである。このとき、セル2は、ステージ10に吸着保持されているが、セル載置部分31も走行が停止しており、セル2の裏面に当接していたエンドレスベルト30が次々と引き剥がされて返り部分32に供給されるだけであるため、セル2の裏面が摩擦により損傷を受けることはない。
【0051】
次に、図2(c)に示すように、吸着プレート11aが待機位置P1に到達することにより、1枚のセル2がステージ10に載置される。そして、この動作を繰り返して、次のセル2と載置されたセル2との縁部同士が上下に重なるようにして配置されることにより、太陽電池モジュールを得ることができる。
【0052】
このように、本発明の太陽電池モジュールの製造装置によれば、太陽電池セルがベルトコンベアユニット20により搬送されステージ上に載置されるため、太陽電池セルの表面に接触することなくステージ上の所定位置に太陽電池セルを配置することができる。また、可動プーリー62の前進移動及び後退移動の際、ベルト走行規制機構90によりエンドレスベルト30の走行が一方向のみに規制されるため、太陽電池セルの裏面にも損傷を与えることなく太陽電池セルを搬送及び載置することができる。
【符号の説明】
【0053】
1 太陽電池モジュールの製造装置
2 セル
7 ヘッド部
10 ステージ
11a 吸着プレート
20 コンベアユニット
21 セル保持部
22 コンベア部
30 エンドレスベルト
31 セル載置部分
32 返り部分
40 余長調節部
41 主アーム部
42 副アーム部
50 搬送装置
61 固定プーリー
62 可動プーリー
80 コロ
81 ダンサーコロ
82 変更コロ
90 走行規制機構
91 クラッチ付コロ
【技術分野】
【0001】
本発明は、太陽電池用のセルを複数枚並べて接続した太陽電池モジュールを製造するための製造装置に関する。
【背景技術】
【0002】
太陽電池モジュールとして、細長い太陽電池用のセルを複数枚並べて接続したスラット構造のものが知られており(例えば、特許文献1参照)、この太陽電池モジュールは、例えば、以下のようにして製造される。
【0003】
帯状である金属材料の上に光電変換層等の各種製膜を行った後、所定長さに切断し、細長い太陽電池用のセル(太陽電池セル)を得る。そして、この太陽電池セルを複数枚、隣り合う太陽電池セルの長辺側の縁部同士が重なるようにしてステージ上に並べ、重ね合わせた縁部同士を接合し、1枚の太陽電池モジュールとしている。このようにして製造された太陽電池モジュールは、複数枚の太陽電池セルが電気的に直列接続された状態となり、実用的な電圧を得ることができる。
【0004】
このように太陽電池セルをステージ上に配置する方法として、ピック&プレイスが用いられる。すなわち、吸着ヘッドにより太陽電池セルの上面を吸着した後、吸着ヘッドをステージ上に移動させ、太陽電池セルが所定の位置に位置した状態で吸着ヘッドを下降させ、吸着を解放する。これにより、複数枚の太陽電池セルが縁部同士を重ね合わせた状態で配置され、縁部同士が接合されることにより、太陽電池モジュールが形成される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2010/023264号
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、上記ピック&プレイスでは、太陽電池セルの上面を吸着するため、太陽電池セルに損傷を与える虞がある。すなわち、太陽電池セルの上面には、光電変換層等の各種製膜が形成されているため、その上面を吸着することにより製膜層の吸着部分が損傷を受け、その結果、太陽電池セルが所定の起電力を得ることができない等の問題が発生する虞があった。
【0007】
また、図7に示すように、ベルトコンベア100によりステージ101に搬送し、載置する方法が考えられる。すなわち、太陽電池セル102の端部を保持するセル保持部103と、固定プーリー104と、この固定プーリー104に対して接離する方向に移動可能な可動プーリー105と、これら固定プーリー104と可動プーリー105とに架け渡されるエンドレスベルト106の弛みを抑えるバランスウエイト107とを有しており、セル保持部103と可動プーリー105とがステージ101上を移動することにより太陽電池セル102が配列される。具体的には、可動プーリー105が固定プーリー104側に配置された状態で太陽電池セル102がエンドレスベルト106上に配置されるとともに、太陽電池セル102の端部がセル保持部103により保持される(図7(a))。そして、セル保持部103と可動プーリー105とが一体となって固定プーリー104から離れる方向に移動することにより、バランスウエイト107が持ち上げられつつエンドレスベルト106が繰り出され、太陽電池セル102がステージ101上の所定位置まで搬送される(図7(b))。なお、図中の矢印はエンドレスベルト106の走行方向を示している。太陽電池セル102の端部がステージ101に載置されると、セル保持部103と可動プーリー105とが元の位置、すなわち、バランスウエイト107の自重を利用して固定プーリー104側に移動する(図7(c))。これにより、可動プーリー105は、固定プーリー104との間に位置するエンドレスベルト106が弛むことなく移動することができる。
【0008】
しかしながら、上記ベルトコンベア100の構成では、太陽電池セル102の表面は非接触で搬送できるものの、太陽電池セル102の裏面は損傷を受ける虞がある。すなわち、太陽電池セル102は、エンドレスベルト106上に載置されているため、セル保持部103の動きと、エンドレスベルト106との動きが一致しなければ太陽電池セル102の裏面が擦れて損傷を受けてしまう。ところが、太陽電池セル102の端部をステージ101に載置した後、可動プーリー105が固定プーリー104側に移動する際、太陽電池セル102は停止しているにもかかわらず、エンドレスベルト106は可動プーリー105とともに固定プーリー104側に走行する(図7(c))。その結果、太陽電池セル102の裏面とエンドレスベルト106とに摩擦が生じ、太陽電池セル102の裏面に設けられた他の太陽電池セル102と接合する接合材が摩耗して損傷を受ける。そして、接合材の摩耗は、パーティクルとなって浮遊し、太陽電池セル102同士の接合環境に影響を与えることも考えられる。
【0009】
本発明は、上記問題点に鑑みてなされたものであり、太陽電池セルに損傷を与えることなく、太陽電池セルをステージ上に搬送し配列することができる太陽電池モジュールの製造装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
上記課題を解決するために本発明の太陽電池モジュールの製造装置は、太陽電池セルを載置するステージと、前記太陽電池セルを搬送し、前記ステージ上に載置するベルトコンベアユニットと、を備え、前記ベルトコンベアユニットにより搬送された複数枚の太陽電池用セルの縁部同士が上下に重なるようにして前記ステージ上で配列されて形成される太陽電池モジュールの製造装置であって、前記ベルトコンベアユニットは、太陽電池セルの端部を保持するとともにステージ上で進退移動可能なセル保持部と、固定プーリーと、この固定プーリーに対して接離する方向に移動可能な可動プーリーと、これら固定プーリーと可動プーリーとに架け渡されるエンドレスベルトの余長を調節する余長調節部とを有しており、前記セル保持部の前進移動に伴って前記可動プーリーが固定プーリー側からステージ側に前進移動して余長調節部からエンドレスベルトが繰り出されるとともに、前記セル保持部の後退移動に伴って可動プーリーが固定プーリー側に後退移動し余長調節部にエンドレスベルトが収容され、前記可動プーリーが前進移動及び後退移動する場合に、エンドレスベルトの走行を一方向のみに規制するベルト走行規制機構をさらに備えることを特徴としている。
【0011】
上記太陽電池モジュールの製造装置によれば、太陽電池セルがベルトコンベアユニットにより搬送されステージ上に載置されるため、太陽電池セルの表面に接触することなくステージ上の所定位置に太陽電池セルを配置することができる。また、可動プーリーの前進移動及び後退移動の際、ベルト走行規制機構によりエンドレスベルトの走行が一方向のみに規制されるため、太陽電池セルの裏面に損傷を与えることなく太陽電池セルを搬送及び載置することができる。具体的には、エンドレスベルトは、ベルト走行規制機構により、太陽電池セルを載置する部分から可動プーリーで折り返して余長調節部に戻る方向、すなわち、順方向のみに規制されている。ここで、エンドレスベルトにおいて、太陽電池セルを載置する部分をセル載置部分、可動プーリーで折り返した後の部分を返り部分と呼ぶことにする。この場合において、エンドレスベルトに載置された太陽電池セルをセル保持部で保持し、セル保持部と可動プーリーが前進移動すると、可動プーリーと固定プーリーとの移動に合わせて余長調節部からエンドレスベルトが繰り出される。このとき、ベルト走行規制機構によりエンドレスベルトが順方向のみに走行規制されるため、エンドレスベルトは、セル載置部分に供給されるが返り部分には供給されることはない。具体的には、可動プーリーの前進移動とともに、セル載置部分は順方向にエンドレスベルトが走行し、返り部分には可動プーリーを折り返したエンドレスベルトが供給されるだけで、実際の返り部分は停止したままである。このように、セル載置部分は、順方向に走行することにより、セル保持部と可動プーリーとの移動を同調させることができ、太陽電池セルの裏面とエンドレスベルトとが擦れる問題を回避することができる。
【0012】
また、太陽電池セルをステージに搬送し太陽電池セルの端部をステージに載置した後、セル保持部と可動プーリーとが元の位置、すなわち、固定プーリー側に移動する。このとき、セル載置部分と返り部分とに弛みが生じようとするが、ベルト走行規制機構によりエンドレスベルトが順方向のみに走行規制されているため、可動プーリーが固定プーリーに近づくに従って、返り部分のエンドレスベルトは余長調節部に収容されるが、セル載置部分のエンドレスベルトは余長調節部に収容されることはない。すなわち、可動プーリーの後退移動とともに発生するエンドレスベルトの余長部分は、エンドレスベルトの返り部分が順方向に走行することにより余長調節部に引き取られ、セル載置部分は可動プーリーの移動に伴って可動プーリーで折返して返り部分側に引き取られる。すなわち、実際のセル載置部分は走行せず停止したままである。これにより、ステージに端部が吸着される太陽電池セルと、エンドレスベルト(セル載置部分)とは、共に停止しているため、太陽電池セルの裏面とエンドレスベルトとが擦れる問題を回避することができる。
【0013】
このようにして、太陽電池セルの表面及び裏面についても損傷を与えることなく、ステージ上に搬送し配列することができる。
【0014】
また、具体的な様態としては、前記余長調節部は、主アーム部と、主アーム部に接離可能に変位する副アーム部とを有しており、主アーム部と副アーム部との間隔が調節されることにより、前記エンドレスベルトの繰出し動作及び収容動作が行われ、前記ベルト走行規制機構は、一方向のみの回転が許容されるクラッチ部が、エンドレスベルトにおける太陽電セルが載置される部分とエンドレスベルトが収容される部分との間、及び、エンドレスベルトにおける太陽電池セルが載置される側の裏面と対向する部分とエンドレスベルトが収容される部分との間にそれぞれエンドレスベルトに当接して設けられており、可動プーリーが前進移動する場合には、太陽電池セルが載置される側に前記余長調節部からエンドレスベルトが繰り出され、可動プーリーが後退移動する場合には、太陽電池セルが載置される側の裏面と対向する側のエンドレスベルトが前記余長調節部に収容される構成にすることができる。
【発明の効果】
【0015】
本発明の太陽電池モジュールの製造装置によれば、太陽電池セルに損傷を与えることなく、太陽電池セルをステージ上に搬送し配列することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の製造装置の概略構成及びその動作を示す側面図である。
【図2】本発明の製造装置の概略構成及びその動作を示す側面図である。
【図3】本発明の製造装置の概略構成を示す平面図である。
【図4】押さえ部材の説明図であり、下方へ揺動させた状態にあるヘッドを進退方向に見た図である。
【図5】太陽電池モジュールの説明図である。
【図6】余長調節部の説明図である。
【図7】従来技術におけるベルトコンベアユニットを用いた例を説明するための図である。
【発明を実施するための形態】
【0017】
本発明の太陽電池モジュールの製造装置に係る実施の形態を図面を用いて説明する。
【0018】
図1と図2は、本発明の太陽電池モジュールの製造装置1の概略構成及びその動作を示す側面図である。図3はこの製造装置1の平面図である。この製造装置1を含む製造システム(製造ライン)によって製造される太陽電池モジュール(以下、モジュールともいう)は、図5に示しているように、複数枚の細長い太陽電池用のセル2(太陽電池セル2。以下単にセル2ともいう)を並べて備えており、これら複数のセル2の両側に電極4が設けられている。セル2は短冊形状であり、セル2の長手方向と、セル2が並べられるセル2の配列方向とは直交している。なお、図5では、説明を容易とするためにセル2を3枚のみとしているが、実際のモジュールでは、3枚よりも多いセル2を備えている。
【0019】
これらセル2及び電極4は、その両面からカバー部材5によって挟まれており、モジュールは一体のシート状を成している。カバー部材5は、可撓性を有し太陽光を透過させるフィルム状の樹脂部材から成り、セル2及び電極4の表面及び裏面に密着している。なお、図5では、カバー部材5をセル2から離した状態としている。
【0020】
配列方向で隣り合うセル2,2の縁部3,3同士は、接合金属を介して上下重ね合わされた状態にあり、当該接合金属によって、セル2,2は重ね合わされた縁部3,3において電気的及び構造的に接続されている。接合金属は、例えば半田6から成り、半田6は、セル2の縁部3に沿ってセル2の長手方向に沿って点在して設けられている。
【0021】
このようなモジュールは、まず、帯状である金属材料の上に光電変換層等の各種製膜を行った後、これを所定長さに切断し、複数枚の細長いセル2を得る。そして、ステージ10上で、これらセル2を、隣り合うセル2,2の長辺側の縁部3,3同士が重なるようにして前記配列方向に順に並べ、これら縁部3,3同士を接合することにより形成される。
【0022】
本発明の太陽電池モジュールの製造装置1は、太陽電池セルを載置するステージ10と、前記太陽電池セル2を搬送し、前記ステージ10上に載置するベルトコンベアユニット20とを有しており、ステージ10上において、隣り合うセル2,2の長辺側の縁部3,3同士が上下重なるようにして、前記配列方向にセル2を順に配列させるものである。
【0023】
ステージ10は、図3に示すように、太陽電池セル2を配置するためのものであり、表面10aは平面状に形成されている。このステージ10には、セル2を吸着するための吸引穴15が設けられており、この吸引穴15に吸引力が発生することにより、セル2の裏面がステージ10の表面に吸着される。吸引穴15は、セル2が並ぶ全領域に複数設けられており、(エアの)吸引を行うポンプ(図示せず)と接続されている。そして、このポンプを作動させることにより、全領域において同時に吸引力が発生しセル2を吸着させることができる。すなわち、ステージ10は、その表面10aに既に載っているセル2及びこれから載せるセル2を吸着して拘束することができる。また、ステージ10は、1枚のセル2が載せられる毎に、セル2の配列方向に、セル2の短手方向寸法に相当する1ピッチ、移動することができるようになっている。
【0024】
ベルトコンベアユニット20は、セル2を1枚ずつステージ10に搬送し、載置するためのものである。このベルトコンベアユニット20は、セル2を保持するセル保持部21と、搬送の際にセル2を載置するコンベア部22と、エンドレスベルト30の余長を調節する余長調節部40(図6参照)とを有している。
【0025】
コンベア部22は、セル2をステージ10まで搬送する際、セル2全体を載置することでセル2の姿勢を維持するものであり、固定プーリー61と、可動プーリー62とを有しており、これらに固定プーリー61及び可動プーリー62にエンドレスベルト30が架け渡されている。
【0026】
固定プーリー61は、製膜処理が行われたセル2を搬送する搬送装置50に対し固定的に設けられている。具体的には、固定プーリー61は、搬送装置50のベルトの高さ位置が、固定プーリー61に架け渡されるエンドレスベルト30の高さ位置と共通の高さ位置になる位置に固定されている。これにより、搬送装置50により搬送されたセル2がスムーズにコンベア部22に乗り換えできるようになっている。
【0027】
可動プーリー62は、固定プーリー61に対して接離する方向に移動可能に構成されており、固定プーリー61から離れる方向に移動することにより、セル2をステージ10まで搬送することができる。具体的には、可動プーリー62は、セル保持部21と一体となって移動できるように構成されており、セル2をステージ10に載置する場合には、セル保持部21とともに固定プーリー61から離れる側に移動し、セル2がステージ10に載置されると、セル保持部21と共に固定プーリー61側に移動できるようになっている。この可動プーリー62の高さ位置は、可動プーリー62に架け渡されるエンドレスベルト30の高さ位置が固定プーリー61に架け渡されるエンドレスベルト30の高さ位置になるように配置されている。したがって、可動プーリー62と固定プーリー61との間に位置するエンドレスベルト30(セル載置部分31(図2(c)参照))にセル2が載置された状態では、セル2がほぼ水平状態を保つ姿勢で保持されるようになっている。なお、セル載置部分31の裏面と対向するエンドレスベルト30を便宜上、返り部分32と呼ぶことにする。
【0028】
セル保持部21は、コンベア部22に載置されたセル2を保持しつつ、ステージ10の所定の位置まで先導するものである。セル保持部21は、セル2を吸着保持する吸着プレート11aと、この吸着プレート11aが取付けられるヘッド部7とを有している。
【0029】
吸着プレート11aは、平板状部材であり、表面には複数の吸着孔が形成されている。この吸着孔には、吸引ポンプ(不図示)が接続されており、吸引ポンプを作動させることにより吸着孔に吸引力を発生させることができる。したがって、吸着プレート11aにセル2が載置された状態で吸引ポンプを作動させることにより、セル2の裏面を吸着プレート11aに吸着保持することができるようになっている。これにより、セル2の表面に損傷を与えることなくセル2を保持することができる。
【0030】
ヘッド部7には、駆動機構(不図示)が設けられており、この駆動機構により吸着プレート11aを待機位置P1と、セル供給位置P2とに移動させることができる。また、本実施形態では、ヘッド部7には、可動プーリー62が連結されており、この駆動機構を動作させることにより吸着プレート11aと可動プーリー62とが共に同調して移動できるようになっている。ここで、待機位置P1とは、可動プーリー62が固定プーリー61に近接する位置であり、セル供給位置P2とは、可動プーリー62が固定プーリー61から離れてステージ10にセル2を配置する位置である。すなわち、このヘッド部7の移動により、可動プーリー62及び吸着プレート11aを前進後退移動させることができ、前進後退移動を繰り返すことにより、搬送装置50から受け渡されたセル2を1枚ずつステージ10の表面に供給できるようになっている。なお、前進移動とは、可動プーリー62又は吸着プレート11aが待機位置P1からセル供給位置P2に移動することであり、後退移動とは、可動プーリー62又は吸着プレート11aがセル供給位置P2から待機位置P1に移動することをいう。
【0031】
また、ヘッド部7には、揺動機構が設けられている。この揺動機構により、搬送されるセル2の一部をステージ10の表面に載置させることができるようになっている。具体的には、揺動機構は、伸縮アクチュエータの先端に設けられた減速機付モータ(不図示)を有しており、このモータの出力軸にヘッド部7が固定されることにより構成されている。そして、出力軸を制御することにより、図1(c)に示すように、軸C1を中心に吸着プレートが水平状態である搬送姿勢(図1(c)の状態)と、吸着プレートが下方に傾く載置姿勢(図2(a)の状態)とに姿勢変化できるようになっている。すなわち、搬送姿勢でセル2を吸着プレート11aから少し延長した状態で吸着し、ステージ10のセル供給位置P2においてヘッド部7を載置姿勢に変化させることにより、セル2の延長部分をステージ10の表面に載置することができる。そして、セル2の延長部分がステージ10に載置されると、ステージ10の吸着穴によりセル2の延長部分が吸着保持される。
【0032】
また、ヘッド部7には、押さえ部材13が設けられている。この押さえ部材13は、ステージ10に載置されたセル2の浮き上がりを防止するためのものである。押さえ部材13は、ローラで構成されており、その外周部分は、例えばスポンジ等の柔軟な素材で形成されている。ここで、図4は、押さえ部材13の説明図であり、揺動機構によって載置姿勢にあるヘッド部7を進退方向に見た図である。ヘッド部7には、ステージ10上を転がるガイドローラ35が設けられており、ガイドローラ35は、押さえ部材13よりも半径が大きく、また、ガイドローラ35の回転中心と、押さえ部材13の回転中心とは一致している。そして、ヘッド部7が載置姿勢の状態で、ガイドローラ35がステージ10の表面に接地すると、押さえ部材13と、理想的な状態でステージ10に載ったセル2の上面との間には、僅かな隙間gが形成される。すなわち、ガイドローラ35の半径は、押さえ部材13の半径と、セル2の厚さと、前記隙間gとの和に設定されている。
【0033】
したがって、図2(a)〜(c)に示すように、ヘッド部7が載置姿勢の状態で、ヘッド部7をセル供給位置P2から待機位置P1に後退させると、ガイドローラ35はステージ10上を転がって移動し、この際、ガイドローラ35は、押さえ部材(押さえローラ)13を、一定の高さ位置に維持することができる。すなわち、押さえ部材13は、ステージ10上に吸着されていくセル2の上を走行させることができる。
【0034】
この押さえ部材13によれば、ステージ10上に吸着したセル2の一部に浮き上がる部分が存在する場合であっても、ヘッド部7を後退させる際に、当該セル2の上を通過することにより、セル2の浮き上がり部分に当接して、当該浮き上がり部分をステージ10側へ押さえることができる。
【0035】
余長調節部40は、エンドレスベルト30の余長を調節するものである。すなわち、可動プーリー62が待機位置P1とセル供給位置P2との間を移動することにより、固定プーリー61と可動プーリー62との間に必要なエンドレスベルト30の長さが変化する。余長調節部40は、必要なエンドレスベルト30の長さに応じてエンドレスベルト30の繰出し及び収容を行うことにより余長を調節する。余長調節部40は、図6に示すように、本装置のフレーム43に取付けられる主アーム部41と、この主アーム部41に対して接離可能な副アーム部42とを備えており、これら主アーム部41と副アーム部42とにエンドレスベルト30が架け渡されている。
【0036】
主アーム部41は、平板状部材で形成されており、本装置のフレーム43に固定されている。主アーム部41には複数のコロ80が設けられている。これらのコロ80は、主アーム部41の延びる方向に沿って一列に配置されるダンサーコロ81と、ベルトの走行方向を変更する変更コロ82とを有している。
【0037】
また、副アーム部42は、平板状部材で形成されており、一方端において、主アーム部41と共に回転軸R1において回転可能に取付けられている。これにより、副アーム部42は、主アーム部41に対して回転軸R1を中心に接離可能に動くことができる。すなわち、副アーム部42は、回転軸R1を中心に回動することにより、副アーム部42が主アーム部41に最も接近する閉状態(副アーム部42は2点鎖線で示す。)と、主アーム部41から最も離れる開状態に変位することができる。
【0038】
また、副アーム部42には、ダンサーコロ81が副アーム部42の延びる方向に沿って一列に配列されて設けられている。このダンサーコロ81が配置される間隔は、主アーム部41のダンサーコロ81が配置される間隔とほぼ同じに設定されており、副アーム部42が主アーム部41に接近した状態(2点鎖線で示す状態)では、主アーム部41のダンサーコロ81の間に副アーム部42のダンサーコロ81が配置されるように設けられている。すなわち、副アーム部42が主アーム部41に接近した状態では、副アーム部42及び主アーム部41のダンサーコロ81が互いに千鳥状に配列された状態になっている。
【0039】
このような主アーム部41及び副アーム部42にエンドレスベルト30が架け渡されている。具体的には、コンベア部22から戻るエンドレスベルト30が変更コロ82により向きが変更され、主アーム部41の最も回転軸R1に近いダンサーコロ81に架け渡される。次に、副アーム部42のダンサーコロ81に架け渡され、次に主アーム部41のダンサーコロ81に架け渡されるというように、主アーム部41のダンサーコロ81と副アーム部42のダンサーコロ81に交互に架け渡され、最後に主アーム部41の変更コロ82に架け渡されてコンベア部22に繰り出される。
【0040】
そして、副アーム部42を回動させて開状態、閉状態にすることにより、主アーム部41と副アーム部42との間にエンドレスベルト30が収容され、コンベア部22におけるエンドレスベルト30の余長を調節することができる。また、副アーム部42のダンサーコロ81と同軸にバランスウエイトBWが取付けられている。このバランスウエイトBWにより、エンドレスベルト30の張力が緩和されると、閉状態の副アーム部42が回動しスムーズに開状態に変化することができる。
【0041】
具体的には、ヘッド部7の駆動機構により可動プーリー62が前進移動すると、可動プーリー62が固定プーリー61から離れる分だけ余長調節部40からエンドレスベルト30が繰り出される。すなわち、可動プーリー62の前進移動に伴ってエンドレスベルト30が引張られることにより、副アーム部42が主アーム部41側に移動する。すなわち、主アーム部41と副アーム部42とが閉状態になる。これにより、主アーム部41と副アーム部42との距離が小さくなることにより余長調節部40におけるエンドレスベルト30の収容量が少なくなり、主アーム部41と副アーム部42との間に収容していたエンドレスベルト30がコンベア部22側に繰り出される。これにより、可動プーリー62はスムーズに前進移動することができる。また、ヘッド部7の駆動機構により可動プーリー62が後退移動すると、可動プーリー62が固定プーリー61に近づくことにより、可動プーリー62と固定プーリー61との間にエンドレスベルト30の余長が発生しエンドレスベルト30の張力が解放される。このとき、副アーム部42は、バランスウエイトBWの自重により、閉状態から開状態に移動し、可動プーリー62と固定プーリー61との間に発生する余長分が、主アーム部41と副アーム部42との間に収容される。従って、可動プーリー62の後退移動によりエンドレスベルト30が弛むのを抑えることができるようになっている。
【0042】
また、本実施形態では、余長調節部40にベルト走行規制機構90が設けられている。このベルト走行規制機構90は、エンドレスベルト30が走行する向きを一方向のみに規制するものである。ベルト走行規制機構90は、クラッチ部を有しており、このクラッチ部がセル載置部分31とエンドレスベルト30が収容される部分との間、及び、返り部分32とエンドレスベルト30が収容される部分との間にそれぞれエンドレスベルト30に当接して設けられている。
【0043】
本実施形態では、主アーム部41の両端に位置するダンサーコロ81が、クラッチ機構を有するクラッチ付コロ91(本発明のクラッチ部)であり、一方向のみに回転するようになっている(ワンウェイクラッチ)。そして、これらのクラッチ付コロ91は、右回り(時計回り)にのみ回転するように構成されている。すなわち、主アーム部41の先端部分に位置するクラッチ付コロ91について見ると、エンドレスベルト30がコンベア部22に繰り出す方向に走行する場合は、クラッチ付コロ91は右回りに回転することになるため、エンドレスベルト30はスムーズに繰り出される。しかし、コンベア部22から余長調節部40に収容する方向に走行しようとすると、クラッチ付コロ91が左回りに回転することになるため、エンドレスベルト30が収容される方向に走行することはできない。一方、主アーム部41の回転軸R1側のクラッチ付コロ91について見ると、エンドレスベルト30がコンベア部22から収容される方向に走行する場合には、クラッチ付コロ91は右回りに回転することになるため、エンドレスベルト30はスムーズに収容される。しかし、余長調節部40からコンベア部22に繰り出す方向に走行しようとすると、クラッチ付コロ91が左回りに回転することになるため、エンドレスベルト30が繰り出される方向に走行することはできない。したがって、これらのクラッチ付コロ91(クラッチ部)により、エンドレスベルト30は、余長調節部40からセル載置部分31に繰り出され、可動プーリー62で折返し、返り部分32を経て余長調節部40に戻ってくるという一方向のみ(図6における矢印の向きのみ)の走行に規制される。
【0044】
次に、本実施形態における太陽電池モジュールの製造装置の動作について図1、図2を用いて説明する。
【0045】
まず、図1(a)に示すように、ステージ10に配置すべセル2が搬送装置50により搬送されると、待機位置P1で待機しているコンベア部22にセル2の乗り換えが行われる。その際、ヘッド部7は、搬送姿勢になっている。
【0046】
次に、図1(b)に示すように、搬送装置50によりセル2が吸着プレート11aから延長部分を形成した所定位置まで搬送され、その位置で吸着プレート11aにより吸着保持される。
【0047】
次に、図1(c)に示すように、セル2をステージ10上まで移動させる。具体的には、ヘッド部7を前進移動させて吸着プレート11aがセル供給位置P2まで移動させる。このヘッド部7の移動により可動プーリー62も前進移動する。このとき、可動プーリー62の前進移動することにより、エンドレスベルト30のセル載置部分31及び返り部分32共に前進方向側に引張られる。すなわち、主アーム部41の先端部におけるクラッチ付コロ91では、エンドレスベルト30が繰り出される側に引張り力を受けるため、クラッチ付コロ91が右回転しエンドレスベルト30がセル載置部分31に繰り出される。一方、主アーム部41の回転軸R1近くのクラッチ付コロ91では、エンドレスベルト30が繰り出される側に引張り力を受けると、クラッチ付コロ91の回転が左回転になるため、クラッチ付コロ91が回転せず、エンドレスベルト30は停止したままになる。したがって、可動プーリー62が前進移動すると、移動した分だけ余長調節部40からセル載置部分31にエンドレスベルト30が繰り出され(図中の”⇒”マークは走行の向きを表す)、返り部分32は可動プーリー62の前進移動に伴ってセル載置部から可動プーリー62で折り返したエンドレスベルト30が次々供給されるだけで実際の走行は停止したままになる(図中の”II”マークは停止の意味を表す)。このとき、セル2は吸着プレート11aに保持されて前進移動するがエンドレスベルト30のセル載置部分31も前進移動方向に走行するため、セル2の裏面が摩擦により損傷を受けることはない。
【0048】
次に、図2(a)に示すように、吸着プレート11aがセル供給位置P2に到達するとヘッド部7が停止する。これに伴い、可動プーリー62の前進移動も停止し、エンドレスベルト30の走行も停止する。そして、ヘッド部7が揺動機構が作動することにより、搬送姿勢から載置姿勢に姿勢変化する。これにより、セル2の延長部分がステージ10の表面に当接するため、その当接部分が吸引穴15により吸引されステージ10に吸着される。
【0049】
次に、図2(b)に示すように、セル2の延長部分が吸着されると吸着プレート11aの吸着が解除され、ヘッド部7がセル供給位置P2から待機位置P1に後退移動する。すなわち、ヘッド部7の後退移動とともに、押さえ部材13がセル2の表面を撫でることによりセル2の浮き上がりを防止しつつセル2をステージ10の表面に確実に吸着保持させる。このヘッド部7の後退移動により可動プーリー62も後退移動する。このとき、可動プーリー62の後退移動により、エンドレスベルト30のセル載置部分31及び返り部分32共に可動プーリー62による引張り力が解放される。エンドレスベルト30の引張り力が解放されると、バランスウエイトBWの自重により副アーム部42が閉状態から開状態になることにより、エンドレスベルト30が副アーム部42により引張られ、余長調節部40でセル載置部分31及び返る部分に生じるエンドレスベルト30の余長が吸収される。
【0050】
すなわち、主アーム部41の回転軸R1近くにクラッチ付コロ91では、エンドレスベルト30が余長調節部40側に引張り力を受けると、クラッチ付コロ91が右回転しエンドレスベルト30が主アーム部41と副アーム部42の間に収容される。一方、主アーム部41の先端部におけるクラッチ付コロ91では、エンドレスベルト30が余長調節部40側に引張り力を受けると、クラッチ付コロ91の回転が左回転になるため、クラッチ付コロ91が回転せず、エンドレスベルト30は停止したままになる。
したがって、可動プーリー62が後退移動すると、返り部分32のエンドレスベルト30は、移動した分だけ余長調節部40に収容される(図中”⇒”マーク)。一方、セル載置部分31のエンドレスベルト30は、余長調節部40に収容されず可動プーリー62の後退移動に伴って、エンドレスベルト30が可動プーリー62で折り返し、返り部分32に次々と供給されるだけで実際には走行せず停止したままである。このとき、セル2は、ステージ10に吸着保持されているが、セル載置部分31も走行が停止しており、セル2の裏面に当接していたエンドレスベルト30が次々と引き剥がされて返り部分32に供給されるだけであるため、セル2の裏面が摩擦により損傷を受けることはない。
【0051】
次に、図2(c)に示すように、吸着プレート11aが待機位置P1に到達することにより、1枚のセル2がステージ10に載置される。そして、この動作を繰り返して、次のセル2と載置されたセル2との縁部同士が上下に重なるようにして配置されることにより、太陽電池モジュールを得ることができる。
【0052】
このように、本発明の太陽電池モジュールの製造装置によれば、太陽電池セルがベルトコンベアユニット20により搬送されステージ上に載置されるため、太陽電池セルの表面に接触することなくステージ上の所定位置に太陽電池セルを配置することができる。また、可動プーリー62の前進移動及び後退移動の際、ベルト走行規制機構90によりエンドレスベルト30の走行が一方向のみに規制されるため、太陽電池セルの裏面にも損傷を与えることなく太陽電池セルを搬送及び載置することができる。
【符号の説明】
【0053】
1 太陽電池モジュールの製造装置
2 セル
7 ヘッド部
10 ステージ
11a 吸着プレート
20 コンベアユニット
21 セル保持部
22 コンベア部
30 エンドレスベルト
31 セル載置部分
32 返り部分
40 余長調節部
41 主アーム部
42 副アーム部
50 搬送装置
61 固定プーリー
62 可動プーリー
80 コロ
81 ダンサーコロ
82 変更コロ
90 走行規制機構
91 クラッチ付コロ
【特許請求の範囲】
【請求項1】
太陽電池セルを載置するステージと、
前記太陽電池セルを搬送し、前記ステージ上に載置するベルトコンベアユニットと、
を備え、前記ベルトコンベアユニットにより搬送された複数枚の太陽電池用セルの縁部同士が上下に重なるようにして前記ステージ上で配列されて形成される太陽電池モジュールの製造装置であって、
前記ベルトコンベアユニットは、太陽電池セルの端部を保持するとともにステージ上で進退移動可能なセル保持部と、固定プーリーと、この固定プーリーに対して接離する方向に移動可能な可動プーリーと、これら固定プーリーと可動プーリーとに架け渡されるエンドレスベルトの余長を調節する余長調節部とを有しており、
前記セル保持部の前進移動に伴って前記可動プーリーが固定プーリー側からステージ側に前進移動して余長調節部からエンドレスベルトが繰り出されるとともに、前記セル保持部の後退移動に伴って可動プーリーが固定プーリー側に後退移動し余長調節部にエンドレスベルトが収容され、前記可動プーリーが前進移動及び後退移動する場合に、エンドレスベルトの走行を一方向のみに規制するベルト走行規制機構をさらに備えることを特徴とする太陽電池モジュールの製造装置。
【請求項2】
前記余長調節部は、主アーム部と、主アーム部に接離可能に変位する副アーム部とを有しており、主アーム部と副アーム部との間隔が調節されることにより、前記エンドレスベルトの繰出し動作及び収容動作が行われ、
前記ベルト走行規制機構は、一方向のみの回転が許容されるクラッチ部が、エンドレスベルトにおける太陽電セルが載置される部分とエンドレスベルトが収容される部分との間、及び、エンドレスベルトにおける太陽電池セルが載置される側の裏面と対向する部分とエンドレスベルトが収容される部分との間にそれぞれエンドレスベルトに当接して設けられており、
可動プーリーが前進移動する場合には、太陽電池セルが載置される側に前記余長調節部からエンドレスベルトが繰り出され、可動プーリーが後退移動する場合には、太陽電池セルが載置される側の裏面と対向する側のエンドレスベルトが前記余長調節部に収容されることを特徴とする請求項2に記載の太陽電池モジュールの製造装置。
【請求項1】
太陽電池セルを載置するステージと、
前記太陽電池セルを搬送し、前記ステージ上に載置するベルトコンベアユニットと、
を備え、前記ベルトコンベアユニットにより搬送された複数枚の太陽電池用セルの縁部同士が上下に重なるようにして前記ステージ上で配列されて形成される太陽電池モジュールの製造装置であって、
前記ベルトコンベアユニットは、太陽電池セルの端部を保持するとともにステージ上で進退移動可能なセル保持部と、固定プーリーと、この固定プーリーに対して接離する方向に移動可能な可動プーリーと、これら固定プーリーと可動プーリーとに架け渡されるエンドレスベルトの余長を調節する余長調節部とを有しており、
前記セル保持部の前進移動に伴って前記可動プーリーが固定プーリー側からステージ側に前進移動して余長調節部からエンドレスベルトが繰り出されるとともに、前記セル保持部の後退移動に伴って可動プーリーが固定プーリー側に後退移動し余長調節部にエンドレスベルトが収容され、前記可動プーリーが前進移動及び後退移動する場合に、エンドレスベルトの走行を一方向のみに規制するベルト走行規制機構をさらに備えることを特徴とする太陽電池モジュールの製造装置。
【請求項2】
前記余長調節部は、主アーム部と、主アーム部に接離可能に変位する副アーム部とを有しており、主アーム部と副アーム部との間隔が調節されることにより、前記エンドレスベルトの繰出し動作及び収容動作が行われ、
前記ベルト走行規制機構は、一方向のみの回転が許容されるクラッチ部が、エンドレスベルトにおける太陽電セルが載置される部分とエンドレスベルトが収容される部分との間、及び、エンドレスベルトにおける太陽電池セルが載置される側の裏面と対向する部分とエンドレスベルトが収容される部分との間にそれぞれエンドレスベルトに当接して設けられており、
可動プーリーが前進移動する場合には、太陽電池セルが載置される側に前記余長調節部からエンドレスベルトが繰り出され、可動プーリーが後退移動する場合には、太陽電池セルが載置される側の裏面と対向する側のエンドレスベルトが前記余長調節部に収容されることを特徴とする請求項2に記載の太陽電池モジュールの製造装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−89885(P2013−89885A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−231295(P2011−231295)
【出願日】平成23年10月21日(2011.10.21)
【出願人】(000219314)東レエンジニアリング株式会社 (505)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月21日(2011.10.21)
【出願人】(000219314)東レエンジニアリング株式会社 (505)
【Fターム(参考)】
[ Back to top ]