
安全制御システム
【課題】コントローラおよびドライブ回路の構成を変更することなく、1台のコントローラで、より多くの台数のドライブ回路を監視することを実現するための安全制御システムを提供する。
【解決手段】セーフティコントローラ10のFB(フィードバック)出力端子21とFB入力端子22との間に、リレー17のa接点17aを電気的に接続する。セーフティコントローラ10の信号出力端子(安全出力(1)端子23)とセーフティドライブ回路14の信号入力端子(安全入力(1)端子33)との間にリレー17のb接点17bを電気的に接続する。リレー17のコイル17cは、セーフティドライブ回路14のFBモニタ出力端子32に接続される。FB出力端子21とFB入力端子22との間に大きな電圧降下を発生させる要素が存在しないため、より多くのドライブ回路を1台のコントローラで監視できる。
【解決手段】セーフティコントローラ10のFB(フィードバック)出力端子21とFB入力端子22との間に、リレー17のa接点17aを電気的に接続する。セーフティコントローラ10の信号出力端子(安全出力(1)端子23)とセーフティドライブ回路14の信号入力端子(安全入力(1)端子33)との間にリレー17のb接点17bを電気的に接続する。リレー17のコイル17cは、セーフティドライブ回路14のFBモニタ出力端子32に接続される。FB出力端子21とFB入力端子22との間に大きな電圧降下を発生させる要素が存在しないため、より多くのドライブ回路を1台のコントローラで監視できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は安全制御システムに関し、特に、複数のドライブ回路を1台のコントローラによって監視するための構成に関する。
【背景技術】
【0002】
生産現場の労働安全を確立するために、安全が確保されている状態において機械設備の動力源(たとえばモータなど)に電力を供給する安全制御システムが構築されている。このような安全制御システムは、たとえばリレーユニット、コントローラ等によって構成される。
【0003】
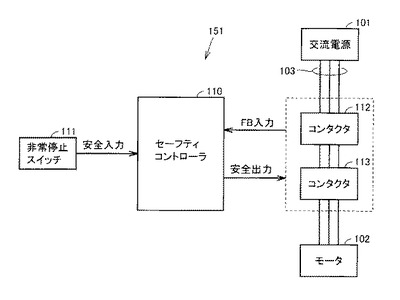
図9は、従来の安全制御システムの1つの構成例を示した図である。図9を参照して、動力源であるモータ102は、交流電源101から三相交流が供給されることにより動作する。モータ102は、たとえば工場内の種々の機械装置を駆動するために用いられる。安全制御システム151は、交流電源101からモータ102への駆動電力の供給および駆動電力の供給の遮断を行なう。
【0004】
安全制御システム151は、セーフティコントローラ110と、非常停止スイッチ111と、コンタクタ112,113とを備える。非常停止スイッチ111は、セーフティコントローラ110に接続される入力機器の一例として図9に示されている。入力機器はライトカーテン、ドアスイッチなどであってもよい。コンタクタ112,113は、交流電源101とモータ102との間の電源ライン103に介挿接続される。セーフティコントローラ110は、コンタクタ112,113を監視する機能を有する。
【0005】
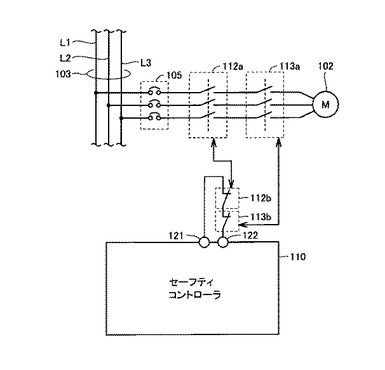
図10は、コンタクタを監視するための構成を具体的に説明するための図である。図9および図10を参照して、電源ライン103は、三相交流の各相に対応するラインL1,L2,L3を含む。モータ102は、コンタクタ112のa接点112a、コンタクタ113のa接点113aおよびサーキットブレーカ105を介して電源ライン103に接続される。
【0006】
一方、セーフティコントローラ110は、FB(FBはフィードバックを表わす。以下同じ)出力端子121およびFB入力端子122を有する。FB出力端子121とFB入力端子122との間には、コンタクタ112のb接点112bおよびコンタクタ113のb接点113bが直列に接続される。コンタクタ112,113の構成を中心に説明するために、図10では非常停止スイッチ111の図示が省略されている。
【0007】
ここでリレー、コンタクタといった励磁コイルへの通電を利用して接点の開閉を行なうスイッチでは、一般に「a接点」とは、励磁コイルの非通電時には開放(オープン)となり、励磁コイルの通電時に閉じる(クローズとなる)接点である。「b接点」は、逆に、励磁コイルの非通電時にはクローズとなりコイルの通電時にはオープンとなる接点である。本明細書においても、「a接点」および「b接点」は、上記の定義通りである。
【0008】
図9および図10に示した構成では、コンタクタ112,113のa接点(112a,113a)は、危険源(図11の場合にはモータ102)への通電を直接操作する。図9に示したFB入力はセーフティコントローラ110に入力される信号である。FB入力は、コンタクタ112,113のa接点(112a,113a)が溶着故障なく正常に動作していることをセーフティコントローラ110が確認するためにセーフティコントローラ110に入力される。コンタクタのa接点が溶着した場合には、モータ102への通電を遮断できなくなる。したがって、コンタクタのa接点が溶着故障していないことを検出する必要がある。
【0009】
図9,図10に示されたような安全制御システムを設計する際には、コンタクタ112,113には、a接点とb接点とが互いに連動するように機械的に拘束された機構を有するコンタクタが用いられる。このようなコンタクタでは、a接点がクローズであるときにはb接点は必ずオープンとなり、a接点がオープンのときにはb接点は必ずクローズとなる。
【0010】
図10に示されるように、2つのコンタクタ112,113のb接点(112b,113b)はセーフティコントローラ110のFB入力端子122に直列に接続される。セーフティコントローラ110は、コンタクタ112,113の動作を許可するための信号である安全出力を出力する。コンタクタ112,113のa接点は、この安全出力に応答してクローズする。
【0011】
セーフティコントローラ110が安全出力をコンタクタ112,113に出力する前に、コンタクタ112,113のb接点(112b,113b)で形成されたフィードバックループがクローズしていることをセーフティコントローラ110が確認する。これがセーフティコントローラのFB監視である。セーフティコントローラ110は、フィードバックループがクローズしていない(オープンである)ことを確認した場合には、安全出力の出力をオンしない。
【0012】
仮にコンタクタ112,113のうち少なくとも1つのコンタクタのa接点が溶着した場合には、そのコンタクタのb接点が強制的にオープンとなる。これによりフィードバックループはオープンとなるため、ユーザが故障を把握することができる。なお、2つのコンタクタを設ける理由は、一方のコンタクタのa接点が溶着していることが検出された場合に、他方のコンタクタのa接点をオープンにするためである。両方のコンタクタのa接点がともに溶着する確率は低いと考えられる。2つのコンタクタを配置することによって、より確実にモータ102への通電を遮断することができる。
【0013】
たとえば特開平9−212206号公報(特許文献1)は、制御経路のための制御装置を開示する。制御装置は、たとえばブラシレスモータ、DCモータ等を制御する。
【0014】
たとえば特表2003−504863号公報(特許文献2)は、ソレノイドを駆動する方法およびシステムを開示する。ソレノイドドライバは、ソレノイドを流れる所望の電流フローと実際の電流フローとの間の差に基づいて、ソレノイドを流れる実際の電流フローを制御する。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】特開平9−212206号公報
【特許文献2】特表2003−504863号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
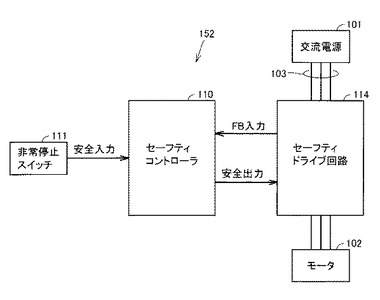
図11は、従来の安全制御システムの別の構成例を示した図である。図9および図11を参照して、安全制御システム152は、コンタクタ112,113に代えてセーフティドライブ回路114を有する。セーフティドライブ回路114は、たとえばサーボドライバあるいはインバータ等のモータ制御機器である。図9に示した安全制御システム151と同じく、セーフティコントローラ110は、セーフティドライブ回路114のFB監視を行なう。
【0017】
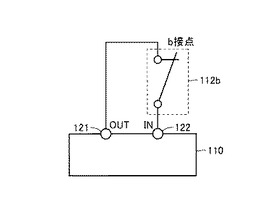
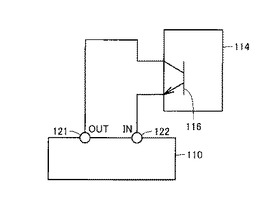
図12は、コンタクタ制御のフィードバックループを説明した図である。図13は、セーフティドライブ回路のフィードバックループを説明した図である。図12および図13を参照して、コンタクタのb接点(図12ではb接点112bを例示する)が、セーフティコントローラ110のFB出力端子(OUT)121およびFB入力端子(IN)122の間に接続される。これに対して、多くの場合、セーフティドライブ回路114のフィードバックモニタ出力には、半導体素子116の出力信号が用いられる。半導体素子を用いる理由の1つは、信号出力機能を担う部分の長寿命化を図るためである。
【0018】
セーフティコントローラ110のFB出力端子121からは、一定電圧(たとえばDC24V)が出力される。セーフティコントローラ110のFB入力端子122には、コンタクタのb接点あるいは半導体素子を介して、電圧が入力される。この入力電圧がHigh(ハイ)レベルであればフィードバックループがクローズであると判定され、入力電圧がLow(ロー)レベルであればフィードバックループがオープンであると判定される。
【0019】
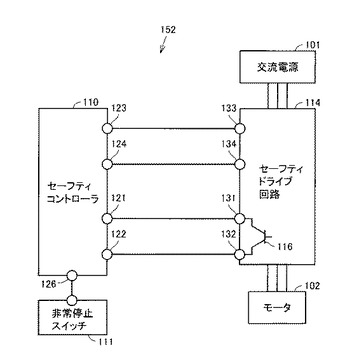
図14は、図13に示したセーフティコントローラとセーフティドライブ回路との接続をより具体的に説明した図である。図14を参照して、セーフティコントローラ110は、FB出力端子121と、FB入力端子122と、安全出力(1)端子123と、安全出力(2)端子124と、安全入力端子126とを有する。安全出力(1)端子123と安全出力(2)端子124とは、セーフティドライブ回路114の動作を許可する信号(「安全出力」と呼ぶ)を出力するための端子である。
【0020】
セーフティドライブ回路114は、半導体素子116と、電圧入力端子131と、FBモニタ出力端子132と、安全入力(1)端子133と、安全入力(2)端子134とを有する。半導体素子116は、電圧入力端子131と、FBモニタ出力端子132との間に設けられる。安全入力(1)端子133と安全入力(2)端子134とは、セーフティコントローラ110から出力された安全出力をセーフティドライブ回路114に入力するための端子である。安全入力(1)端子133と安全入力(2)端子134とに入力される信号を「安全入力」と呼ぶ。
【0021】
セーフティコントローラ110の安全出力(1)端子123とセーフティドライブ回路114の安全入力(1)端子133とが直接的に接続される。セーフティコントローラ110の安全出力(2)端子124とセーフティドライブ回路114の安全入力(2)端子134とが直接的に接続される。セーフティコントローラ110のFB出力端子121とセーフティドライブ回路114の電圧入力端子131とが直接的に接続される。セーフティコントローラ110のFB入力端子122とセーフティドライブ回路114のFBモニタ出力端子132とが直接的に接続される。
【0022】
セーフティコントローラ110のFB出力端子121からはHighレベルの信号が出力される。セーフティコントローラ110のFB入力端子122に入力される信号がHighレベルの信号であることがセーフティコントローラ110で検出される。この場合には、セーフティコントローラ110の安全出力(1)端子123と安全出力(2)端子124とからHighレベルの信号が出力される。セーフティコントローラ110の安全出力(1)端子123および安全出力(2)端子124の両方からHighレベルの信号を出力するのは、安全出力の信頼性を高めるためである。
【0023】
一方、セーフティドライブ回路114に入力される安全入力1,2の両方がHighレベルであるときに、FBモニタ出力はオフ(OFF)である。セーフティドライブ回路14に入力される安全入力1,2の両方がHighレベルでない場合、すなわち、安全入力1,2の少なくとも一方がLowレベルであるときには、FBモニタ出力はオン(ON)である。
【0024】
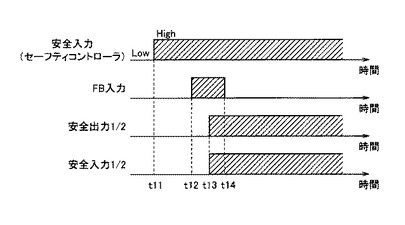
図15は、図14に示した安全制御システムの動作を説明するためのタイミング図である。図14および図15を参照して、まず、初期状態(時刻t11以前の状態)において、セーフティコントローラ110の安全出力1および安全出力2(図15において「安全出力1/2」とまとめて記載する)はいずれもLowレベルである。図示しないが、安全出力1/2がLowレベルであるためFBモニタ出力はオンしている。すなわちセーフティドライブ回路114のFBモニタ出力端子から電圧が出力される。
【0025】
次に、時刻t11においてセーフティコントローラ110の安全入力端子126への入力信号(安全入力)がHighレベルになる。これによって安全入力がHighレベルになる。
【0026】
続いて時刻t12においてFB入力端子122に入力される信号がHighレベルの信号であることがセーフティコントローラ110で検出される。これにより時刻t13においてセーフティコントローラ110の安全出力1/2がHighレベルになるので、セーフティドライブ回路114の安全入力1/2もHighレベルとなる。安全入力1/2がHighレベルとなることでセーフティドライブ回路114の半導体素子116がオフする。したがって時刻t14においてFBモニタ出力がオフする。
【0027】
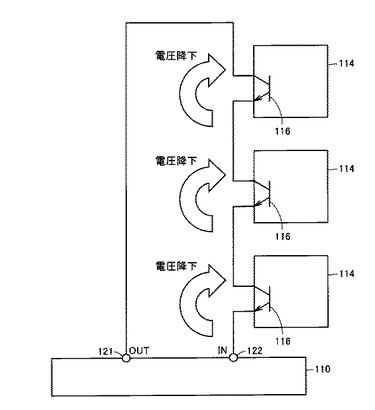
しかしながら、セーフティドライブ回路のフィードバックループにおいては、半導体素子116による電圧降下が発生する。図16に示されるように、複数のセーフティドライブ回路114を1台のセーフティコントローラ110で管理する場合には、コントローラのフィードバック入力端子に各セーフティドライブ回路114の半導体素子116が直列に接続される。したがって、セーフティコントローラ110のフィードバックループにおける電圧降下が大きくなる。これによってFB入力端子122の入力電圧が大きく低下する。
【0028】
FB入力端子122の入力電圧が低い場合には、セーフティコントローラ110はフィードバックループがオープンであると判定する。したがって、セーフティコントローラ110は安全出力をオンしない。すなわち、各セーフティドライブ回路が正常であっても、セーフティコントローラが複数のセーフティドライブ回路の動作を許可することができない。フィードバックループでの電圧降下が大きくなりすぎるのを防ぐため、従来では、セーフティコントローラ110に接続されるセーフティドライブ回路114の台数が制限される。
【0029】
このような問題を解決するための方法として、セーフティコントローラの構成あるいはセーフティドライブ回路の構成を変更することが考えられる。しかしながら、設計変更に伴う開発工数の増加、およびコストの増加が懸念される。さらに、変更後のセーフティコントローラあるいはセーフティドライブ回路が目標とする安全規格に適合していることの確認および認証が必要となる。このために費用および時間を要することが懸念される。
【0030】
なお、特開平9−212206号公報(特許文献1)は、サーボドライバにおける電圧降下について説明している(たとえば特開平9−212206号公報の明細書[0043])。しかしながら、特開平9−212206号公報には、上記の問題は記載されていない。同じく特表2003−504863号公報(特許文献2)にも上記の問題は記載されていない。
【0031】
本発明の目的は、コントローラおよびドライブ回路の構成を変更することなく、1台のコントローラで、より多くの台数のドライブ回路を監視することを実現するための安全制御システムを提供することである。
【課題を解決するための手段】
【0032】
本発明は要約すれば、安全制御システムであって、コントローラと、動力源を駆動するための少なくとも1つのドライブ回路とを備える。コントローラは、少なくとも1つのドライブ回路の状態をコントローラが監視するためのフィードバックループを形成するためのフィードバック出力端子およびフィードバック入力端子と、少なくとも1つのドライブ回路による動力源の駆動を許可するための出力信号をコントローラから出力するための信号出力端子とを含む。ドライブ回路は、コントローラの信号出力端子から出力された出力信号をドライブ回路に入力するための信号入力端子と、ドライブ回路からコントローラにドライブ回路の状態を示すモニタ電圧を出力するためのモニタ出力端子と、モニタ出力端子から出力されるモニタ電圧を発生させる半導体素子と、半導体素子にモニタ電圧を発生させるための電圧を半導体素子に入力するための電圧入力端子とを含む。ドライブ回路は、コントローラからの出力信号が信号入力端子に入力される前は、モニタ出力端子からモニタ電圧を出力する。安全制御システムは、少なくとも1つの第1のリレーをさらに備える。少なくとも1つの第1のリレーは、第1のコイルと、相補的に連動する第1の接点と第2の接点とを有する。少なくとも1つの第1のリレーは、第1のコイルの通電時には第1の接点が閉じるとともに第2の接点が開放し、第1のコイルの非通電時には第1の接点が開放するとともに第2の接点が閉じるように構成される。第1のリレーの第1の接点は、コントローラのフィードバック出力端子とフィードバック入力端子とに電気的に接続される。第1のリレーの第2の接点は、コントローラの信号出力端子とドライブ回路の信号入力端子とに電気的に接続される。第1のリレーの第1のコイルは、ドライブ回路のモニタ出力端子に電気的に接続される。
【0033】
好ましくは、コントローラは、出力信号と同期した補助出力信号をコントローラから出力するための補助出力端子をさらに含む。コントローラは、フィードバックループが閉じていることを確認した後に、出力信号を出力信号端子から出力するとともに、補助出力信号を補助出力端子から出力する。安全制御システムは、第2のリレーをさらに備える。第2のリレーは、第2のコイルと、第2のコイルの通電時には開放する一方で第2のコイルの非通電時には閉じるように構成された第3の接点とを含む。第1のリレーの第1のコイルと第2のリレーの第3の接点とは、ドライブ回路のモニタ出力端子と接地とに直列に電気的に接続される。第2のリレーの第2のコイルは、コントローラの補助出力端子と接地とに電気的に接続される。
【0034】
好ましくは、少なくとも1つのドライブ回路は、複数のドライブ回路である。少なくとも1つの第1のリレーは、複数のドライブ回路にそれぞれ対応して設けられた複数の第1のリレーである。複数の第1のリレーの各々の第1の接点は、コントローラのフィードバック出力端子とフィードバック入力端子との間に直列に電気的に接続される。複数の第1のリレーの各々の第2の接点は、コントローラの信号出力端子と、複数のドライブ回路のうちの各第1のリレーに対応するドライブ回路の信号入力端子とに電気的に接続される。複数の第1のリレーの各々の第1のコイルは、対応するドライブ回路のモニタ出力端子に電気的に接続されるとともに、第2のリレーの第3の接点に並列に接続される。
【0035】
好ましくは、第1のリレーの第1のコイルは、ドライブ回路のモニタ出力端子と接地とに電気的に接続される。
【0036】
好ましくは、少なくとも1つのドライブ回路は、複数のドライブ回路である。少なくとも1つの第1のリレーは、複数のドライブ回路にそれぞれ対応して設けられた複数の第1のリレーである。複数の第1のリレーの各々の第1の接点は、コントローラのフィードバック出力端子とフィードバック入力端子との間に直列に電気的に接続される。複数の第1のリレーの各々の第2の接点は、互いに直列に電気的に接続されるとともに、コントローラの信号出力端子と、複数のドライブ回路のうちの各第1のリレーに対応するドライブ回路の信号入力端子との間に電気的に接続される。
【発明の効果】
【0037】
本発明によれば、コントローラおよびドライブ回路の構成を変更することなく、1台のコントローラで、より多くの台数のドライブ回路を監視することを実現するための安全制御システムを提供することができる。
【図面の簡単な説明】
【0038】
【図1】本発明の第1の実施の形態に係る安全制御システムの構成の一例を示した図である。
【図2】図1に示したセーフティドライブ回路の動作を説明するための図である。
【図3】図1に示した安全制御システムの動作を説明するためのタイミング図である。
【図4】複数台のセーフティドライブ回路が1台のセーフティコントローラに接続された、実施の形態1に係る安全制御システムの構成を示した図である。
【図5】本発明の第2の実施の形態に係る安全制御システムの構成の一例を示した図である。
【図6】図5に示したセーフティドライブ回路の動作を説明するための図である。
【図7】図5に示した安全制御システムの動作を説明するためのタイミング図である。
【図8】複数台のセーフティドライブ回路が1台のセーフティコントローラに接続された、実施の形態2に係る安全制御システムの構成を示した図である。
【図9】従来の安全制御システムの1つの構成例を示した図である。
【図10】コンタクタを監視するための構成を具体的に説明するための図である。
【図11】従来の安全制御システムの別の構成例を示した図である。
【図12】コンタクタ制御のフィードバックループを説明した図である。
【図13】セーフティドライブ回路のフィードバックループを説明した図である。
【図14】図13に示したセーフティコントローラとセーフティドライブ回路との接続をより具体的に説明した図である。
【図15】図14に示した安全制御システムの動作を説明するためのタイミング図である。
【図16】各セーフティドライブ回路の半導体素子を直列に接続してフィードバックループを形成したときの問題点を説明するための図である。
【発明を実施するための形態】
【0039】
以下、この発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
【0040】
[実施の形態1]
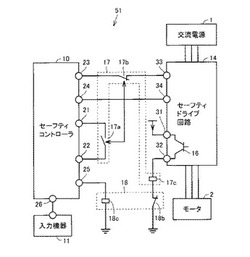
図1は、本発明の第1の実施の形態に係る安全制御システムの構成の一例を示した図である。
【0041】
図1を参照して、実施の形態1に係る安全制御システム51は、セーフティコントローラ10と、入力機器11と、セーフティドライブ回路14と、リレー17,18とを備える。入力機器11は、たとえば非常停止スイッチであるが、ユーザの操作によってセーフティコントローラ10に信号を入力するものであればよい。たとえばライトカーテン、ドアスイッチなどを入力機器11として適用できる。また、入力機器11は、単体の装置であると限定されず、複数の装置を組み合わせることで実現されてもよい。
【0042】
モータ2は動力源であり、交流電源1から三相交流が供給されることにより動作する。セーフティドライブ回路14は、モータ2を駆動する。セーフティドライブ回路14は、交流電源1からモータ2への駆動電力の供給および駆動電力の供給の遮断を行なう。セーフティドライブ回路14は、たとえばサーボドライバあるいはインバータ等のモータ制御機器である。セーフティコントローラ10は、セーフティドライブ回路14を監視する機能を有する。なお、交流電源1に代えて直流電源を用いてもよい。
【0043】
本明細書では、この発明の実施の形態の説明において「セーフティコントローラ」および「セーフティドライブ回路」という用語を用いている。しかしながら「セーフティコントローラ」および「セーフティドライブ回路」は、特定の装置を指すものではない。所定の安全規格に適合した制御装置(コントローラ)および駆動装置(ドライブ回路またはドライバ)であれば本発明を適用することができる。
【0044】
セーフティコントローラ10は、FB(フィードバック)出力端子21と、FB入力端子22と、安全出力(1)端子23と、安全出力(2)端子24と、補助出力端子25と、安全入力端子26とを有する。FB出力端子21とFB入力端子22とは、セーフティドライブ回路14の状態をセーフティコントローラ10が監視するためのフィードバックループを形成するための端子である。「セーフティドライブ回路14の状態」とは、この実施の形態では、出力許可状態および出力遮断状態である(たとえば図2を参照)。安全出力(1)端子23と安全出力(2)端子24とは、セーフティドライブ回路14の動作を許可する信号(「安全出力」と呼ぶ)をセーフティコントローラ10から出力するための端子である。補助出力端子25は、安全出力同期した信号(補助出力)をセーフティコントローラ10から出力するための端子である。安全入力端子26は、入力機器11からの信号(安全入力)をセーフティコントローラ10に入力するための端子である。入力機器11は、セーフティコントローラ10の安全入力端子26に接続される。
【0045】
セーフティドライブ回路14は、半導体素子16と、電圧入力端子31と、FBモニタ出力端子32と、安全入力(1)端子33と、安全入力(2)端子34とを有する。安全入力(1)端子33と安全入力(2)端子34とは、セーフティコントローラ10の安全出力(1)端子23および安全出力(2)端子24から出力された安全出力をセーフティドライブ回路14に入力するための端子である。安全入力(1)端子33と安全入力(2)端子34とに入力される信号を「安全入力」と呼ぶ。
【0046】
セーフティコントローラ10の安全出力端子とセーフティドライブ回路14の安全入力端子とからなる組が少なくとも1組あれば本発明は適用可能である。ただし、この実施の形態のように、安全出力端子と安全入力端子との組を2つ以上設けることによって、より安全制御システムの信頼性を高めることができる。
【0047】
半導体素子16は、電圧入力端子31と、FBモニタ出力端子32との間に設けられる。FBモニタ出力端子32は、セーフティドライブ回路14からセーフティコントローラ10にセーフティドライブ回路の状態を示すモニタ電圧(FBモニタ)を出力するためのモニタ出力端子である。半導体素子16は、FBモニタ出力端子32から出力されるモニタ電圧を発生させる。電圧入力端子31は、半導体素子16にモニタ電圧を発生させるための電圧を半導体素子16に入力するための電圧入力端子である。この実施の形態では、電圧入力端子31は、定電圧源に接続される。なお、後に詳細に説明するように、セーフティドライブ回路14は、セーフティコントローラ10からの出力信号(安全出力)がセーフティドライブ回路の安全入力端子に入力される前は、FBモニタ出力端子32からFBモニタが出力される。
【0048】
リレー17は、a接点17aと、b接点17bと、コイル17cとを有する。a接点17aとb接点17bとは相補的に連動するように機械的に拘束される。この実施の形態では、「相補的」とは、a接点17aとb接点17bとのうちの一方が「オープン」であるときに他方が「クローズ」であることを指す。すなわちa接点17aがクローズである時にはb接点17bがオープンであり、a接点17aがオープンである時にはb接点17bがクローズである。したがってa接点17aとb接点17bとがともにクローズすることがない。このような構造は、概して強制ガイド接点構造とも呼ばれる。すなわち、強制ガイド接点構造を有するリレーであればリレー17に適用可能である。
【0049】
a接点17aは、本発明の「第1のリレーの第1の接点」に対応する。b接点17bは、本発明の「第1のリレーの第2の接点」に対応する。コイル17cは、本発明の「第1のリレーの第1のコイル」に対応する。
【0050】
a接点17aは、セーフティコントローラ10のFB出力端子21と、FB入力端子22とに電気的に接続される。b接点17bは、セーフティコントローラ10の安全出力(1)端子23と、セーフティドライブ回路14の安全入力(1)端子33とに電気的に接続される。コイル17cの一方端は、セーフティドライブ回路14のFBモニタ出力端子32に電気的に接続される。本明細書では、「電気的に接続される」とは直接的に接続される場合だけでなく、たとえば配線を介して接続される場合も含む。
【0051】
リレー18は、b接点18bと、コイル18cとを有する。b接点18bの一方端はリレー17のコイル17cの他方端に接続され、b接点18bの他方端は接地される。すなわち、リレー17のコイル17cと、リレー18のb接点18bとは、セーフティドライブ回路14のFBモニタ出力端子32と接地との間に直列に電気的に接続される。コイル18cの一方端は、セーフティコントローラ10の補助出力端子25に接続され、コイル18cの他方端は接地される。すなわち、コイル18cは、セーフティコントローラ10の補助出力端子25と接地との間に電気的に接続される。
【0052】
リレー18は、強制ガイド接点構造を有する必要はなく、たとえば汎用のリレーであってもよい。b接点18bは、本発明の「第2のリレーの第3の接点」に対応する。コイル18cは、本発明の「第2のリレーの第2のコイル」に対応する。
【0053】
図1に示した構成によれば、セーフティコントローラ10のフィードバックループ、すなわち、セーフティコントローラ10のFB出力端子21とFB入力端子22との間の経路にはリレー17のa接点17aのみ設けられる。a接点17aの抵抗は、半導体素子16がオンした時の抵抗に比べて著しく小さい。したがって、上記のフィードバックループには、電圧降下要素が実質上は存在しない。
【0054】
さらに、リレー18は、セーフティコントローラ10の安全出力と同期する補助出力によって駆動される。一方、リレー17は、リレー18のb接点18b、およびセーフティドライブ回路14の半導体素子16(すなわちセーフティドライブ回路14のFBモニタ出力)によって駆動される。
【0055】
この実施の形態では、セーフティコントローラ10の2つの安全出力端子のうちの少なくとも1つと、その安全出力端子に対応するセーフティドライブ回路14の安全入力端子との間に、強制ガイド接点構造を有するリレーのb接点が設けられていればよい。したがって、図1に示した構成に代わり、リレー17のb接点17bが、セーフティコントローラ10の安全出力(2)端子24と、セーフティドライブ回路14の安全入力(2)端子34との間に設けられていてもよい。あるいは、図1に示した構成において、強制ガイド接点構造を有する別のリレーのb接点を、セーフティコントローラ10の安全出力(2)端子24と、セーフティドライブ回路14の安全入力(2)端子34との間に設けてもよい。
【0056】
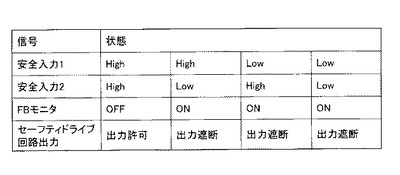
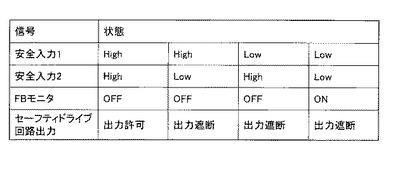
図2は、図1に示したセーフティドライブ回路の動作を説明するための図である。図2を参照して、「安全入力1」、「安全入力2」は、それぞれ、セーフティドライブ回路14の安全入力(1)端子33および安全入力(2)端子34に入力される信号を表わす。セーフティドライブ回路14の安全入力1,2の両方がHighレベルであるときには、セーフティドライブ回路14の出力が許可される。この場合、FBモニタ出力はオフ(OFF)である。セーフティドライブ回路14の安全入力1,2の両方がHighレベルでない場合、すなわち、安全入力1,2の少なくとも一方がLowレベルであるときには、セーフティドライブ回路14の出力が遮断される。この場合、FBモニタ出力はオン(ON)である。セーフティドライブ回路の出力とは、たとえば、セーフティドライブ回路からモータに供給される電力である。
【0057】
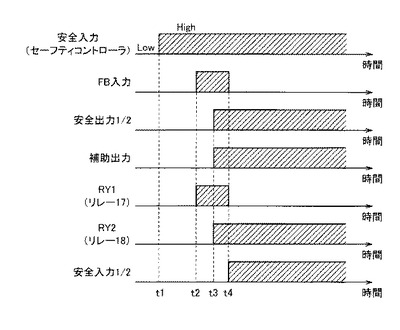
図3は、図1に示した安全制御システムの動作を説明するためのタイミング図である。図1および図3を参照して、まず、初期状態(時刻t1以前の状態)において、セーフティコントローラ10の安全出力1および安全出力2(図3において「安全出力1/2」とまとめて記載する)はいずれもLowレベルである。図3には示していないが、安全出力1/2がLowレベルであるため、FBモニタ出力はオンしている。すなわちセーフティドライブ回路14では半導体素子16がオンしてFBモニタ出力端子32からモニタ電圧が出力される。
【0058】
セーフティコントローラ10の補助出力がLowレベルであるので、コイル18cには電流が流れない。したがってリレー18(RY2)のb接点18bはクローズする。これにより、電流がセーフティドライブ回路14のFBモニタ出力端子32からリレー17(RY1)のコイル17cおよびリレー18のb接点18bを流れる。コイル17cに電流が流れることでリレー17がオンする。
【0059】
次に、時刻t1においてセーフティコントローラ10の安全入力端子26に入力される入力機器11からの信号(安全入力)がHighレベルになる。具体的にはユーザが入力機器11を操作することにより、安全入力がHighレベルになる。なお、この実施の形態では、「信号がHighレベルになる」ということは信号が出力されていることを意味する。以下の説明においても同様である。
【0060】
続いて時刻t2においてリレー17のa接点17aがクローズする。これによりフィードバックループがクローズするので、セーフティコントローラ10のFB入力端子22に入力される信号(FB入力)がHighレベルになる。FB入力がHighレベルになることにより、時刻t3において、セーフティコントローラ10の安全出力1/2がともにHighレベルになる。補助出力は安全出力1/2と同期してHighレベルになる。補助出力がHighレベルになることによって、リレー18のコイル18cに電流が流れる。したがってリレー18がオンする。
【0061】
リレー18がオンすることで、b接点18bがオープンとなる。これにより、リレー17のコイル17cに電流が流れなくなるので、時刻t4においてリレー17がオフする。リレー17がオフすることにより、a接点17aがオープンになるとともにb接点17bがクローズとなる。したがってセーフティドライブ回路14に入力される安全入力1/2がHighレベルとなる。安全入力1/2がHighレベルとなることでセーフティドライブ回路14の半導体素子16がオフする。したがってFBモニタ出力がオフする。
【0062】
なお、動作の順番が容易に理解されるように、図3では、時刻t1,t2,t3,t4を互いに離して示している。上記の動作がほぼ同時のタイミングで実行されていてもよい。
【0063】
図3および図15を対比すれば分かるように、この実施の形態に係る安全制御システムの動作は、従来の安全制御システムの動作と基本的に同じである。すなわち、FB入力がHighレベルになった後に安全出力1/2がHighレベルになる。安全出力1/2がHighレベルになることにより、安全入力1/2がHighレベルになる。したがって、既存のセーフティコントローラおよびセーフティドライブ回路をこの実施の形態に係る安全制御システムに適用することができる。
【0064】
さらに、この実施の形態によれば、セーフティコントローラ10のFBループ内に電圧降下要素がない。したがって複数台のセーフティドライブ回路を1台のセーフティコントローラに接続した場合に、従来の構成(図16を参照)に比べて、FBループにおける電圧降下を小さくすることができる。これにより、従来の構成に比べて、より多くの台数のセーフティドライブ回路を1台のセーフティコントローラに接続することができる。すなわち、1台のセーフティコントローラで監視可能なセーフティドライブ回路の台数を増やすことができる。
【0065】
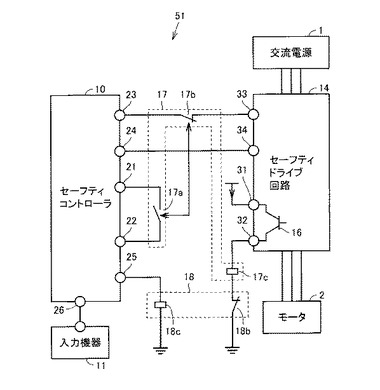
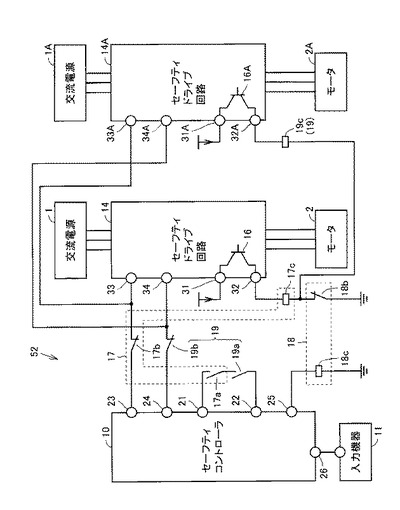
図4は、複数台のセーフティドライブ回路が1台のセーフティコントローラに接続された、実施の形態1に係る安全制御システムの構成を示した図である。図1および図4を参照して、安全制御システム52は、セーフティドライブ回路14Aおよびリレー19が追加される点において安全制御システム51と異なる。セーフティドライブ回路14Aは、交流電源1Aからの交流電力をモータ2Aに供給したり、モータ2Aへの電力の供給を遮断したりする。なお、図4では交流電源1,1Aが示されているが、1つの交流電源からモータ2,2Aに交流電力が供給されてもよい。
【0066】
リレー19は、a接点19aと、b接点19bと、コイル19cとを有する。リレー17と同様に、a接点19aとb接点19bとは互いに連動するように機械的に拘束される。
【0067】
セーフティドライブ回路14Aは、セーフティドライブ回路14と同じ構成を有する。具体的には、セーフティドライブ回路14Aは、半導体素子16Aと、電圧入力端子31Aと、FBモニタ出力端子32Aと、安全入力(1)端子33Aと、安全入力(2)端子34Aとを有する。
【0068】
セーフティコントローラ10のFB出力端子21とFB入力端子22との間には、リレー17のa接点17aおよびリレー19のa接点19aが直列に電気的に接続される。安全入力(1)端子33Aは、セーフティドライブ回路14の安全入力(1)端子33とともにリレー17のb接点17bに接続される。安全入力(2)端子34Aは、セーフティドライブ回路14の安全入力(1)端子34とともにリレー19のb接点19bに接続される。
【0069】
すなわちリレー17のb接点17bは、セーフティコントローラ10の信号出力端子(安全出力(1)端子23)と、リレー17に対応するセーフティドライブ回路14の信号入力端子(安全入力(1)端子33)との間に電気的に接続される。リレー19のb接点19bは、セーフティコントローラ10の信号出力端子(安全出力(2)端子24)と、リレー19に対応するセーフティドライブ回路14Aの信号入力端子(安全入力(2)端子34A)との間に電気的に接続される。なお、リレー19のb接点19bは、安全入力(1)端子33と安全入力(1)端子33Aとを電気的に接続する経路に挿入されてもよい。
【0070】
コイル19cの一方端は、セーフティドライブ回路14AのFBモニタ出力端子32Aに接続され、コイル19cの他方端は、リレー18のb接点18bに接続される。したがって、コイル17c,19cは、リレー18のb接点18bに並列に接続される。
【0071】
図4に示した安全制御システム52の動作は、基本的に図3に示した動作と同じである。図3において、RY1をリレー17,19に置き換え、安全入力1/2を、セーフティドライブ回路14,14Aの安全入力1/2と置き換えればよい。
【0072】
図4では2台のセーフティドライブ回路が示されているが、この実施の形態によれば、3台以上のセーフティドライブ回路も1台のセーフティコントローラ10により監視可能である。セーフティドライブ回路の台数と同じ数のリレー(a接点とb接点とが機械的に連動することが要求される)を設け、それらのリレーのa接点をセーフティコントローラ10のFB出力端子21とFB入力端子22との間に直列に電気的に接続する。また、それらのリレーのb接点は、対応のセーフティドライブ回路の信号入力端子(安全入力(1)端子、安全入力(2)端子のいずれか)と、セーフティコントローラ10の信号出力端子(安全出力(1)端子23、安全入力(2)端子24)との間に電気的に接続する。それらのリレーのコイルを、リレー18の接点18bに並列に接続する。
【0073】
図14、図16等に示した従来の構成によれば、セーフティコントローラのFB入力端子の入力仕様(Highレベルと見なされる電圧)およびセーフティドライバのFBモニタ出力での電圧降下によって、1台のセーフティコントローラに接続可能なセーフティドライブ回路の台数が制限される。したがって、より多くの台数のセーフティドライブ回路に対する安全制御を実行するために、ユーザは、複数台のセーフティコントローラを準備して、各セーフティコントローラにセーフティドライブ回路を接続する必要があった。しかしながら、このような構成によれば、複数台のセーフティコントローラが互いに同期して動作するための処置が必要となる。
【0074】
これに対して実施の形態1によれば、リレーを追加するだけで、1台のセーフティコントローラにより監視および制御することができるセーフティドライブ回路の台数を従来よりも大幅に増やすことができる。したがって、実施の形態1によれば、より多くの台数のセーフティドライブ回路を1台のセーフティコントローラによって監視するための構成を、よりシンプルに構築することができるとともに、安価に実現することができる。
【0075】
さらに、この実施の形態では、a接点とb接点とが互いに連動するように機械的に拘束されたリレー(17,19)が用いられる。このリレーのa接点は、セーフティコントローラ10のFB出力端子21およびFB入力端子22の間に設けられる。b接点は、セーフティコントローラの安全出力端子と、対応するセーフティコントローラの安全入力端子との間に設けられる。このようなリレーを用いることで当該リレーの故障を見つけることが可能になる。
【0076】
図11に示したように、FB監視は、もともとコンタクタのa接点の溶着を見つけることが目的である。セーフティドライブ回路の場合にも、そのドライブの出力が故障したときには、FBモニタ出力がオフ状態を保持する。これによりセーフティコントローラの安全出力がオン状態のままになることを抑止して危険状態となることを防ぐ。仮にa接点の溶着といった故障が検出できない場合、FBモニタ出力がオフ状態を保持しても、セーフティコントローラからの安全出力がオンしてしまう可能性が生じる。
【0077】
これに対して実施の形態1によれば、リレー17のa接点17a(またはリレー19のa接点19a)が溶着した場合に、そのリレー17のb接点17b(またはリレー19のb接点19b)が強制的にオープンとなる。したがって、セーフティドライブ回路(14,14A)の安全入力の少なくとも1つがオフとなる。このためセーフティドライブ回路(14,14A)は動作しないので、動力源(モータ2)は動作しない。
【0078】
一方、リレー17のb接点17b(またはリレー19のb接点19b)が溶着した場合に、そのリレー17のa接点17a(またはリレー19のa接点19a)がオープンとなる。この場合、セーフティコントローラ10のFBループがオープンになるので、セーフティコントローラ10の安全出力1,2はともにLowレベルとなる。この場合は、セーフティドライブ回路14(14A)の出力が遮断される。
【0079】
一方、リレー18は汎用リレーでもよい。リレー18の故障として、オン故障およびオフ故障が考えられる。しかしオン故障およびオフ故障のいずれの場合であってもセーフティドライブ回路14(14A)の出力を遮断できる。
【0080】
たとえばリレー18のオン故障が生じた場合、リレー18はオンしたままになる。これによりリレー17(19)のオン状態が保持される。この場合には、リレー17(19)のb接点(17b,19b)がオープンのままに保持される。したがって、セーフティコントローラ10からセーフティドライブ(14,14A)への安全出力の伝達が遮断される。これにより、セーフティドライバ(14,14A)の各々では、安全入力1,2の両方ともにHighレベルになることがない。したがってセーフティドライバ(14,14A)の出力が遮断される。
【0081】
一方、リレー18のオフ故障が生じた場合、リレー18はオフしたままになる。これによりリレー17(19)のオフ状態が保持される。この場合には、リレー17(19)のa接点(17a,19a)がオープンのままに保持される。したがって、セーフティコントローラ10のFBループがオープンになる。この場合、セーフティコントローラ10からの安全出力1,2はLowレベルである。したがってセーフティドライバ(14,14A)の出力が遮断される。
【0082】
[実施の形態2]
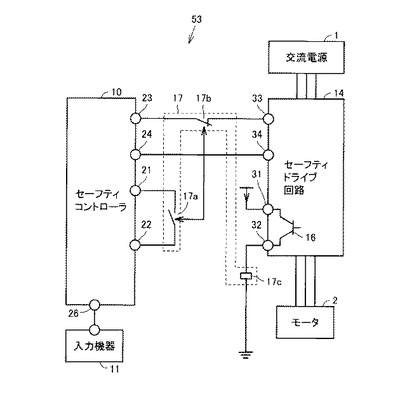
図5は、本発明の第2の実施の形態に係る安全制御システムの構成の一例を示した図である。図1および図5を参照して、実施の形態2に係る安全制御システム53は、リレー18が省略されている点において実施の形態1に係る安全制御システム51と相違する。
【0083】
実施の形態1と同様にセーフティコントローラ10は、補助出力端子25を有していてもよい。実施の形態2では、補助出力端子25は必須ではない。このため補助出力端子25は図5に示されていない。リレー17のコイル17cの一方端はセーフティドライブ回路14のFBモニタ出力端子32に接続される。コイル17cの一方端は接地される。したがってこの実施の形態では、コイル17cはセーフティドライブ回路14のFBモニタ出力端子32と接地との間に電気的に接続される。実施の形態2に係る安全制御システム53の他の部分の構成は、実施の形態1に係る安全制御システム51の対応する部分の構成と同様であるので、以後の説明は繰り返さない。
【0084】
図6は、図5に示したセーフティドライブ回路の動作を説明するための図である。図2および図6を参照して、実施の形態2では、「安全入力1」、「安全入力2」のいずれか一方がHighレベルであり、他方がLowレベルである場合に、FBモニタ出力はオフとなる。この点において実施の形態2は実施の形態1と異なっている。
【0085】
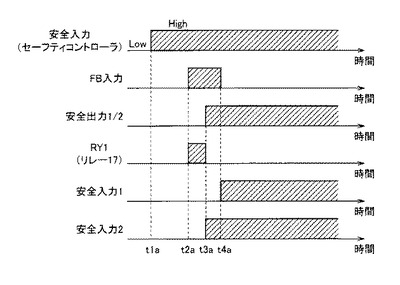
図7は、図5に示した安全制御システムの動作を説明するためのタイミング図である。図5および図7を参照して、まず、初期状態(時刻t1a以前の状態)において、セーフティコントローラ10の安全出力1および安全出力2(図7において「安全出力1/2」とまとめて記載する)はいずれもLowレベルである。図7には示していないが、安全出力1/2がLowレベルであるため、FBモニタ出力はオンしている。
【0086】
FBモニタ出力はオンしているので、セーフティドライブ回路14のモニタ出力端子32からリレー17(RY1)のコイル17cに電流が流れる。これによりリレー17がオンする。
【0087】
時刻t1aにおいてセーフティコントローラ10の安全入力端子26に入力される安全入力がHighレベルになる。続いて時刻t2aにおいてリレー17のa接点17aがクローズする。これによりセーフティコントローラ10のFB入力端子22に入力される信号(FB入力)がHighレベルになる。FB入力がHighレベルになることにより、時刻t3aにおいて、セーフティコントローラ10の安全出力1/2がHighレベルになる。リレー17のa接点17aがクローズしているため、リレー17のb接点17bはオープンである。このため、セーフティドライブ回路14の安全入力1は、時刻t3aにおいてLowレベルである。一方、セーフティドライブ回路14の安全入力2は、Highレベルである。
【0088】
セーフティドライブ回路14の安全入力1,2がそれぞれLowレベルおよびHighレベルとなることで、セーフティドライブ回路14のFBモニタ出力がオフする。これにより、リレー17のコイル17cに電流が流れなくなるので、リレー17がオフする。
時刻t4aにおいて、リレー17のa接点17aがオープンになるとともにb接点17bがクローズとなる。したがってセーフティドライブ回路14に入力される安全入力1がHighレベルとなる。これにより、時刻t4a以後、安全入力1,2は、Highレベルである。安全入力1,2は、Highレベルであるときには、FBモニタ出力はLowレベルである。したがって、時刻t4a以後もFBモニタ出力はLowレベルである。
【0089】
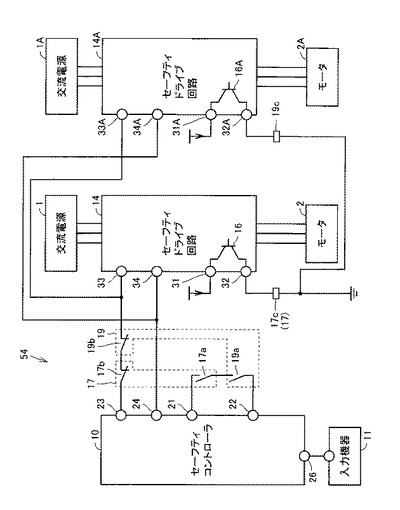
図8は、複数台のセーフティドライブ回路が1台のセーフティコントローラに接続された、実施の形態2に係る安全制御システムの構成を示した図である。図5および図8を参照して、安全制御システム54は、セーフティドライブ回路14Aおよびリレー19が追加される点において安全制御システム53と異なる。なお、セーフティドライブ回路14Aの構成については、図4に示された構成と同様であるので以後の説明を繰り返さない。同じく、リレー19の構成についても図4に示された構成と同様であるので以後の説明を繰り返さない。
【0090】
図8に示す構成では、リレー17のb接点17bとリレー19のb接点19bとが、セーフティコントローラ10の安全出力(1)端子23とセーフティドライブ回路(14,14A)の安全入力(1)端子(33,33A)との間に直列に接続される。リレー19のコイル19cは、セーフティドライブ回路14AのFBモニタ出力端子32Aと接地とに電気的に接続される。図8に示した構成では、リレー17のコイル17cとリレー19のコイル19cとは、共通に接地されているが、別々に接地されていてもよい。
【0091】
図8に示した構成と図5に示した構成との対比から分かるように、実施の形態2に係る構成では、複数台のセーフティドライブ回路が1台のセーフティコントローラに接続された場合にもリレー18を不要とすることができる。
【0092】
図8に示した構成に代えて、リレー17のb接点17bとリレー19のb接点19bとが、セーフティコントローラ10の安全出力(2)端子24とセーフティドライブ回路(14,14A)の安全入力(2)端子(34,34A)との間に直列に接続されてもよい。ただし、実施の形態2では、セーフティドライブ回路(14,14A)は図7に示した関係に従って動作するので、セーフティドライブ回路(14,14A)の2つの安全入力端子のうちの一方は、b接点を介さずに、セーフティコントローラ10の対応する安全出力端子と直接的に接続することが必要となる。
【0093】
実施の形態2によれば、実施の形態1と同じ効果を得ることができる。したがって、より多くの台数のセーフティドライブ回路を1台のセーフティコントローラによって監視するための構成を、よりシンプルに構築することができるとともに、安価に実現することができる。
【0094】
さらに実施の形態2によれば、実施の形態1に比べて使用されるリレーの個数を少なくすることができる。
【0095】
今回開示された実施の形態はすべての点で例示であって制限的なものでないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0096】
1,1A,101 交流電源、2,2A,102 モータ、10,110 セーフティコントローラ、11 入力機器、14,14A,114 セーフティドライブ回路、16,16A,116 半導体素子、17〜19 リレー、17a,19a,112a,113a a接点、17b〜19b,112b,113b b接点、17c〜19c コイル、21,121 FB(フィードバック)出力端子、22,122 FB(フィードバック)入力端子、23,123 安全出力(1)端子 24,124 安全出力(2)端子、25 補助出力端子、26,126 安全入力端子、33,33A,133 安全入力(1)端子、34,34A,134 安全入力(2)端子、31,31A,131 電圧入力端子、32,32A,132 FBモニタ出力端子、51〜54,151,152 安全制御システム、103 電源ライン、105 サーキットブレーカ、111 非常停止スイッチ、112,113 コンタクタ、L1〜L3 ライン。
【技術分野】
【0001】
本発明は安全制御システムに関し、特に、複数のドライブ回路を1台のコントローラによって監視するための構成に関する。
【背景技術】
【0002】
生産現場の労働安全を確立するために、安全が確保されている状態において機械設備の動力源(たとえばモータなど)に電力を供給する安全制御システムが構築されている。このような安全制御システムは、たとえばリレーユニット、コントローラ等によって構成される。
【0003】
図9は、従来の安全制御システムの1つの構成例を示した図である。図9を参照して、動力源であるモータ102は、交流電源101から三相交流が供給されることにより動作する。モータ102は、たとえば工場内の種々の機械装置を駆動するために用いられる。安全制御システム151は、交流電源101からモータ102への駆動電力の供給および駆動電力の供給の遮断を行なう。
【0004】
安全制御システム151は、セーフティコントローラ110と、非常停止スイッチ111と、コンタクタ112,113とを備える。非常停止スイッチ111は、セーフティコントローラ110に接続される入力機器の一例として図9に示されている。入力機器はライトカーテン、ドアスイッチなどであってもよい。コンタクタ112,113は、交流電源101とモータ102との間の電源ライン103に介挿接続される。セーフティコントローラ110は、コンタクタ112,113を監視する機能を有する。
【0005】
図10は、コンタクタを監視するための構成を具体的に説明するための図である。図9および図10を参照して、電源ライン103は、三相交流の各相に対応するラインL1,L2,L3を含む。モータ102は、コンタクタ112のa接点112a、コンタクタ113のa接点113aおよびサーキットブレーカ105を介して電源ライン103に接続される。
【0006】
一方、セーフティコントローラ110は、FB(FBはフィードバックを表わす。以下同じ)出力端子121およびFB入力端子122を有する。FB出力端子121とFB入力端子122との間には、コンタクタ112のb接点112bおよびコンタクタ113のb接点113bが直列に接続される。コンタクタ112,113の構成を中心に説明するために、図10では非常停止スイッチ111の図示が省略されている。
【0007】
ここでリレー、コンタクタといった励磁コイルへの通電を利用して接点の開閉を行なうスイッチでは、一般に「a接点」とは、励磁コイルの非通電時には開放(オープン)となり、励磁コイルの通電時に閉じる(クローズとなる)接点である。「b接点」は、逆に、励磁コイルの非通電時にはクローズとなりコイルの通電時にはオープンとなる接点である。本明細書においても、「a接点」および「b接点」は、上記の定義通りである。
【0008】
図9および図10に示した構成では、コンタクタ112,113のa接点(112a,113a)は、危険源(図11の場合にはモータ102)への通電を直接操作する。図9に示したFB入力はセーフティコントローラ110に入力される信号である。FB入力は、コンタクタ112,113のa接点(112a,113a)が溶着故障なく正常に動作していることをセーフティコントローラ110が確認するためにセーフティコントローラ110に入力される。コンタクタのa接点が溶着した場合には、モータ102への通電を遮断できなくなる。したがって、コンタクタのa接点が溶着故障していないことを検出する必要がある。
【0009】
図9,図10に示されたような安全制御システムを設計する際には、コンタクタ112,113には、a接点とb接点とが互いに連動するように機械的に拘束された機構を有するコンタクタが用いられる。このようなコンタクタでは、a接点がクローズであるときにはb接点は必ずオープンとなり、a接点がオープンのときにはb接点は必ずクローズとなる。
【0010】
図10に示されるように、2つのコンタクタ112,113のb接点(112b,113b)はセーフティコントローラ110のFB入力端子122に直列に接続される。セーフティコントローラ110は、コンタクタ112,113の動作を許可するための信号である安全出力を出力する。コンタクタ112,113のa接点は、この安全出力に応答してクローズする。
【0011】
セーフティコントローラ110が安全出力をコンタクタ112,113に出力する前に、コンタクタ112,113のb接点(112b,113b)で形成されたフィードバックループがクローズしていることをセーフティコントローラ110が確認する。これがセーフティコントローラのFB監視である。セーフティコントローラ110は、フィードバックループがクローズしていない(オープンである)ことを確認した場合には、安全出力の出力をオンしない。
【0012】
仮にコンタクタ112,113のうち少なくとも1つのコンタクタのa接点が溶着した場合には、そのコンタクタのb接点が強制的にオープンとなる。これによりフィードバックループはオープンとなるため、ユーザが故障を把握することができる。なお、2つのコンタクタを設ける理由は、一方のコンタクタのa接点が溶着していることが検出された場合に、他方のコンタクタのa接点をオープンにするためである。両方のコンタクタのa接点がともに溶着する確率は低いと考えられる。2つのコンタクタを配置することによって、より確実にモータ102への通電を遮断することができる。
【0013】
たとえば特開平9−212206号公報(特許文献1)は、制御経路のための制御装置を開示する。制御装置は、たとえばブラシレスモータ、DCモータ等を制御する。
【0014】
たとえば特表2003−504863号公報(特許文献2)は、ソレノイドを駆動する方法およびシステムを開示する。ソレノイドドライバは、ソレノイドを流れる所望の電流フローと実際の電流フローとの間の差に基づいて、ソレノイドを流れる実際の電流フローを制御する。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】特開平9−212206号公報
【特許文献2】特表2003−504863号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
図11は、従来の安全制御システムの別の構成例を示した図である。図9および図11を参照して、安全制御システム152は、コンタクタ112,113に代えてセーフティドライブ回路114を有する。セーフティドライブ回路114は、たとえばサーボドライバあるいはインバータ等のモータ制御機器である。図9に示した安全制御システム151と同じく、セーフティコントローラ110は、セーフティドライブ回路114のFB監視を行なう。
【0017】
図12は、コンタクタ制御のフィードバックループを説明した図である。図13は、セーフティドライブ回路のフィードバックループを説明した図である。図12および図13を参照して、コンタクタのb接点(図12ではb接点112bを例示する)が、セーフティコントローラ110のFB出力端子(OUT)121およびFB入力端子(IN)122の間に接続される。これに対して、多くの場合、セーフティドライブ回路114のフィードバックモニタ出力には、半導体素子116の出力信号が用いられる。半導体素子を用いる理由の1つは、信号出力機能を担う部分の長寿命化を図るためである。
【0018】
セーフティコントローラ110のFB出力端子121からは、一定電圧(たとえばDC24V)が出力される。セーフティコントローラ110のFB入力端子122には、コンタクタのb接点あるいは半導体素子を介して、電圧が入力される。この入力電圧がHigh(ハイ)レベルであればフィードバックループがクローズであると判定され、入力電圧がLow(ロー)レベルであればフィードバックループがオープンであると判定される。
【0019】
図14は、図13に示したセーフティコントローラとセーフティドライブ回路との接続をより具体的に説明した図である。図14を参照して、セーフティコントローラ110は、FB出力端子121と、FB入力端子122と、安全出力(1)端子123と、安全出力(2)端子124と、安全入力端子126とを有する。安全出力(1)端子123と安全出力(2)端子124とは、セーフティドライブ回路114の動作を許可する信号(「安全出力」と呼ぶ)を出力するための端子である。
【0020】
セーフティドライブ回路114は、半導体素子116と、電圧入力端子131と、FBモニタ出力端子132と、安全入力(1)端子133と、安全入力(2)端子134とを有する。半導体素子116は、電圧入力端子131と、FBモニタ出力端子132との間に設けられる。安全入力(1)端子133と安全入力(2)端子134とは、セーフティコントローラ110から出力された安全出力をセーフティドライブ回路114に入力するための端子である。安全入力(1)端子133と安全入力(2)端子134とに入力される信号を「安全入力」と呼ぶ。
【0021】
セーフティコントローラ110の安全出力(1)端子123とセーフティドライブ回路114の安全入力(1)端子133とが直接的に接続される。セーフティコントローラ110の安全出力(2)端子124とセーフティドライブ回路114の安全入力(2)端子134とが直接的に接続される。セーフティコントローラ110のFB出力端子121とセーフティドライブ回路114の電圧入力端子131とが直接的に接続される。セーフティコントローラ110のFB入力端子122とセーフティドライブ回路114のFBモニタ出力端子132とが直接的に接続される。
【0022】
セーフティコントローラ110のFB出力端子121からはHighレベルの信号が出力される。セーフティコントローラ110のFB入力端子122に入力される信号がHighレベルの信号であることがセーフティコントローラ110で検出される。この場合には、セーフティコントローラ110の安全出力(1)端子123と安全出力(2)端子124とからHighレベルの信号が出力される。セーフティコントローラ110の安全出力(1)端子123および安全出力(2)端子124の両方からHighレベルの信号を出力するのは、安全出力の信頼性を高めるためである。
【0023】
一方、セーフティドライブ回路114に入力される安全入力1,2の両方がHighレベルであるときに、FBモニタ出力はオフ(OFF)である。セーフティドライブ回路14に入力される安全入力1,2の両方がHighレベルでない場合、すなわち、安全入力1,2の少なくとも一方がLowレベルであるときには、FBモニタ出力はオン(ON)である。
【0024】
図15は、図14に示した安全制御システムの動作を説明するためのタイミング図である。図14および図15を参照して、まず、初期状態(時刻t11以前の状態)において、セーフティコントローラ110の安全出力1および安全出力2(図15において「安全出力1/2」とまとめて記載する)はいずれもLowレベルである。図示しないが、安全出力1/2がLowレベルであるためFBモニタ出力はオンしている。すなわちセーフティドライブ回路114のFBモニタ出力端子から電圧が出力される。
【0025】
次に、時刻t11においてセーフティコントローラ110の安全入力端子126への入力信号(安全入力)がHighレベルになる。これによって安全入力がHighレベルになる。
【0026】
続いて時刻t12においてFB入力端子122に入力される信号がHighレベルの信号であることがセーフティコントローラ110で検出される。これにより時刻t13においてセーフティコントローラ110の安全出力1/2がHighレベルになるので、セーフティドライブ回路114の安全入力1/2もHighレベルとなる。安全入力1/2がHighレベルとなることでセーフティドライブ回路114の半導体素子116がオフする。したがって時刻t14においてFBモニタ出力がオフする。
【0027】
しかしながら、セーフティドライブ回路のフィードバックループにおいては、半導体素子116による電圧降下が発生する。図16に示されるように、複数のセーフティドライブ回路114を1台のセーフティコントローラ110で管理する場合には、コントローラのフィードバック入力端子に各セーフティドライブ回路114の半導体素子116が直列に接続される。したがって、セーフティコントローラ110のフィードバックループにおける電圧降下が大きくなる。これによってFB入力端子122の入力電圧が大きく低下する。
【0028】
FB入力端子122の入力電圧が低い場合には、セーフティコントローラ110はフィードバックループがオープンであると判定する。したがって、セーフティコントローラ110は安全出力をオンしない。すなわち、各セーフティドライブ回路が正常であっても、セーフティコントローラが複数のセーフティドライブ回路の動作を許可することができない。フィードバックループでの電圧降下が大きくなりすぎるのを防ぐため、従来では、セーフティコントローラ110に接続されるセーフティドライブ回路114の台数が制限される。
【0029】
このような問題を解決するための方法として、セーフティコントローラの構成あるいはセーフティドライブ回路の構成を変更することが考えられる。しかしながら、設計変更に伴う開発工数の増加、およびコストの増加が懸念される。さらに、変更後のセーフティコントローラあるいはセーフティドライブ回路が目標とする安全規格に適合していることの確認および認証が必要となる。このために費用および時間を要することが懸念される。
【0030】
なお、特開平9−212206号公報(特許文献1)は、サーボドライバにおける電圧降下について説明している(たとえば特開平9−212206号公報の明細書[0043])。しかしながら、特開平9−212206号公報には、上記の問題は記載されていない。同じく特表2003−504863号公報(特許文献2)にも上記の問題は記載されていない。
【0031】
本発明の目的は、コントローラおよびドライブ回路の構成を変更することなく、1台のコントローラで、より多くの台数のドライブ回路を監視することを実現するための安全制御システムを提供することである。
【課題を解決するための手段】
【0032】
本発明は要約すれば、安全制御システムであって、コントローラと、動力源を駆動するための少なくとも1つのドライブ回路とを備える。コントローラは、少なくとも1つのドライブ回路の状態をコントローラが監視するためのフィードバックループを形成するためのフィードバック出力端子およびフィードバック入力端子と、少なくとも1つのドライブ回路による動力源の駆動を許可するための出力信号をコントローラから出力するための信号出力端子とを含む。ドライブ回路は、コントローラの信号出力端子から出力された出力信号をドライブ回路に入力するための信号入力端子と、ドライブ回路からコントローラにドライブ回路の状態を示すモニタ電圧を出力するためのモニタ出力端子と、モニタ出力端子から出力されるモニタ電圧を発生させる半導体素子と、半導体素子にモニタ電圧を発生させるための電圧を半導体素子に入力するための電圧入力端子とを含む。ドライブ回路は、コントローラからの出力信号が信号入力端子に入力される前は、モニタ出力端子からモニタ電圧を出力する。安全制御システムは、少なくとも1つの第1のリレーをさらに備える。少なくとも1つの第1のリレーは、第1のコイルと、相補的に連動する第1の接点と第2の接点とを有する。少なくとも1つの第1のリレーは、第1のコイルの通電時には第1の接点が閉じるとともに第2の接点が開放し、第1のコイルの非通電時には第1の接点が開放するとともに第2の接点が閉じるように構成される。第1のリレーの第1の接点は、コントローラのフィードバック出力端子とフィードバック入力端子とに電気的に接続される。第1のリレーの第2の接点は、コントローラの信号出力端子とドライブ回路の信号入力端子とに電気的に接続される。第1のリレーの第1のコイルは、ドライブ回路のモニタ出力端子に電気的に接続される。
【0033】
好ましくは、コントローラは、出力信号と同期した補助出力信号をコントローラから出力するための補助出力端子をさらに含む。コントローラは、フィードバックループが閉じていることを確認した後に、出力信号を出力信号端子から出力するとともに、補助出力信号を補助出力端子から出力する。安全制御システムは、第2のリレーをさらに備える。第2のリレーは、第2のコイルと、第2のコイルの通電時には開放する一方で第2のコイルの非通電時には閉じるように構成された第3の接点とを含む。第1のリレーの第1のコイルと第2のリレーの第3の接点とは、ドライブ回路のモニタ出力端子と接地とに直列に電気的に接続される。第2のリレーの第2のコイルは、コントローラの補助出力端子と接地とに電気的に接続される。
【0034】
好ましくは、少なくとも1つのドライブ回路は、複数のドライブ回路である。少なくとも1つの第1のリレーは、複数のドライブ回路にそれぞれ対応して設けられた複数の第1のリレーである。複数の第1のリレーの各々の第1の接点は、コントローラのフィードバック出力端子とフィードバック入力端子との間に直列に電気的に接続される。複数の第1のリレーの各々の第2の接点は、コントローラの信号出力端子と、複数のドライブ回路のうちの各第1のリレーに対応するドライブ回路の信号入力端子とに電気的に接続される。複数の第1のリレーの各々の第1のコイルは、対応するドライブ回路のモニタ出力端子に電気的に接続されるとともに、第2のリレーの第3の接点に並列に接続される。
【0035】
好ましくは、第1のリレーの第1のコイルは、ドライブ回路のモニタ出力端子と接地とに電気的に接続される。
【0036】
好ましくは、少なくとも1つのドライブ回路は、複数のドライブ回路である。少なくとも1つの第1のリレーは、複数のドライブ回路にそれぞれ対応して設けられた複数の第1のリレーである。複数の第1のリレーの各々の第1の接点は、コントローラのフィードバック出力端子とフィードバック入力端子との間に直列に電気的に接続される。複数の第1のリレーの各々の第2の接点は、互いに直列に電気的に接続されるとともに、コントローラの信号出力端子と、複数のドライブ回路のうちの各第1のリレーに対応するドライブ回路の信号入力端子との間に電気的に接続される。
【発明の効果】
【0037】
本発明によれば、コントローラおよびドライブ回路の構成を変更することなく、1台のコントローラで、より多くの台数のドライブ回路を監視することを実現するための安全制御システムを提供することができる。
【図面の簡単な説明】
【0038】
【図1】本発明の第1の実施の形態に係る安全制御システムの構成の一例を示した図である。
【図2】図1に示したセーフティドライブ回路の動作を説明するための図である。
【図3】図1に示した安全制御システムの動作を説明するためのタイミング図である。
【図4】複数台のセーフティドライブ回路が1台のセーフティコントローラに接続された、実施の形態1に係る安全制御システムの構成を示した図である。
【図5】本発明の第2の実施の形態に係る安全制御システムの構成の一例を示した図である。
【図6】図5に示したセーフティドライブ回路の動作を説明するための図である。
【図7】図5に示した安全制御システムの動作を説明するためのタイミング図である。
【図8】複数台のセーフティドライブ回路が1台のセーフティコントローラに接続された、実施の形態2に係る安全制御システムの構成を示した図である。
【図9】従来の安全制御システムの1つの構成例を示した図である。
【図10】コンタクタを監視するための構成を具体的に説明するための図である。
【図11】従来の安全制御システムの別の構成例を示した図である。
【図12】コンタクタ制御のフィードバックループを説明した図である。
【図13】セーフティドライブ回路のフィードバックループを説明した図である。
【図14】図13に示したセーフティコントローラとセーフティドライブ回路との接続をより具体的に説明した図である。
【図15】図14に示した安全制御システムの動作を説明するためのタイミング図である。
【図16】各セーフティドライブ回路の半導体素子を直列に接続してフィードバックループを形成したときの問題点を説明するための図である。
【発明を実施するための形態】
【0039】
以下、この発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
【0040】
[実施の形態1]
図1は、本発明の第1の実施の形態に係る安全制御システムの構成の一例を示した図である。
【0041】
図1を参照して、実施の形態1に係る安全制御システム51は、セーフティコントローラ10と、入力機器11と、セーフティドライブ回路14と、リレー17,18とを備える。入力機器11は、たとえば非常停止スイッチであるが、ユーザの操作によってセーフティコントローラ10に信号を入力するものであればよい。たとえばライトカーテン、ドアスイッチなどを入力機器11として適用できる。また、入力機器11は、単体の装置であると限定されず、複数の装置を組み合わせることで実現されてもよい。
【0042】
モータ2は動力源であり、交流電源1から三相交流が供給されることにより動作する。セーフティドライブ回路14は、モータ2を駆動する。セーフティドライブ回路14は、交流電源1からモータ2への駆動電力の供給および駆動電力の供給の遮断を行なう。セーフティドライブ回路14は、たとえばサーボドライバあるいはインバータ等のモータ制御機器である。セーフティコントローラ10は、セーフティドライブ回路14を監視する機能を有する。なお、交流電源1に代えて直流電源を用いてもよい。
【0043】
本明細書では、この発明の実施の形態の説明において「セーフティコントローラ」および「セーフティドライブ回路」という用語を用いている。しかしながら「セーフティコントローラ」および「セーフティドライブ回路」は、特定の装置を指すものではない。所定の安全規格に適合した制御装置(コントローラ)および駆動装置(ドライブ回路またはドライバ)であれば本発明を適用することができる。
【0044】
セーフティコントローラ10は、FB(フィードバック)出力端子21と、FB入力端子22と、安全出力(1)端子23と、安全出力(2)端子24と、補助出力端子25と、安全入力端子26とを有する。FB出力端子21とFB入力端子22とは、セーフティドライブ回路14の状態をセーフティコントローラ10が監視するためのフィードバックループを形成するための端子である。「セーフティドライブ回路14の状態」とは、この実施の形態では、出力許可状態および出力遮断状態である(たとえば図2を参照)。安全出力(1)端子23と安全出力(2)端子24とは、セーフティドライブ回路14の動作を許可する信号(「安全出力」と呼ぶ)をセーフティコントローラ10から出力するための端子である。補助出力端子25は、安全出力同期した信号(補助出力)をセーフティコントローラ10から出力するための端子である。安全入力端子26は、入力機器11からの信号(安全入力)をセーフティコントローラ10に入力するための端子である。入力機器11は、セーフティコントローラ10の安全入力端子26に接続される。
【0045】
セーフティドライブ回路14は、半導体素子16と、電圧入力端子31と、FBモニタ出力端子32と、安全入力(1)端子33と、安全入力(2)端子34とを有する。安全入力(1)端子33と安全入力(2)端子34とは、セーフティコントローラ10の安全出力(1)端子23および安全出力(2)端子24から出力された安全出力をセーフティドライブ回路14に入力するための端子である。安全入力(1)端子33と安全入力(2)端子34とに入力される信号を「安全入力」と呼ぶ。
【0046】
セーフティコントローラ10の安全出力端子とセーフティドライブ回路14の安全入力端子とからなる組が少なくとも1組あれば本発明は適用可能である。ただし、この実施の形態のように、安全出力端子と安全入力端子との組を2つ以上設けることによって、より安全制御システムの信頼性を高めることができる。
【0047】
半導体素子16は、電圧入力端子31と、FBモニタ出力端子32との間に設けられる。FBモニタ出力端子32は、セーフティドライブ回路14からセーフティコントローラ10にセーフティドライブ回路の状態を示すモニタ電圧(FBモニタ)を出力するためのモニタ出力端子である。半導体素子16は、FBモニタ出力端子32から出力されるモニタ電圧を発生させる。電圧入力端子31は、半導体素子16にモニタ電圧を発生させるための電圧を半導体素子16に入力するための電圧入力端子である。この実施の形態では、電圧入力端子31は、定電圧源に接続される。なお、後に詳細に説明するように、セーフティドライブ回路14は、セーフティコントローラ10からの出力信号(安全出力)がセーフティドライブ回路の安全入力端子に入力される前は、FBモニタ出力端子32からFBモニタが出力される。
【0048】
リレー17は、a接点17aと、b接点17bと、コイル17cとを有する。a接点17aとb接点17bとは相補的に連動するように機械的に拘束される。この実施の形態では、「相補的」とは、a接点17aとb接点17bとのうちの一方が「オープン」であるときに他方が「クローズ」であることを指す。すなわちa接点17aがクローズである時にはb接点17bがオープンであり、a接点17aがオープンである時にはb接点17bがクローズである。したがってa接点17aとb接点17bとがともにクローズすることがない。このような構造は、概して強制ガイド接点構造とも呼ばれる。すなわち、強制ガイド接点構造を有するリレーであればリレー17に適用可能である。
【0049】
a接点17aは、本発明の「第1のリレーの第1の接点」に対応する。b接点17bは、本発明の「第1のリレーの第2の接点」に対応する。コイル17cは、本発明の「第1のリレーの第1のコイル」に対応する。
【0050】
a接点17aは、セーフティコントローラ10のFB出力端子21と、FB入力端子22とに電気的に接続される。b接点17bは、セーフティコントローラ10の安全出力(1)端子23と、セーフティドライブ回路14の安全入力(1)端子33とに電気的に接続される。コイル17cの一方端は、セーフティドライブ回路14のFBモニタ出力端子32に電気的に接続される。本明細書では、「電気的に接続される」とは直接的に接続される場合だけでなく、たとえば配線を介して接続される場合も含む。
【0051】
リレー18は、b接点18bと、コイル18cとを有する。b接点18bの一方端はリレー17のコイル17cの他方端に接続され、b接点18bの他方端は接地される。すなわち、リレー17のコイル17cと、リレー18のb接点18bとは、セーフティドライブ回路14のFBモニタ出力端子32と接地との間に直列に電気的に接続される。コイル18cの一方端は、セーフティコントローラ10の補助出力端子25に接続され、コイル18cの他方端は接地される。すなわち、コイル18cは、セーフティコントローラ10の補助出力端子25と接地との間に電気的に接続される。
【0052】
リレー18は、強制ガイド接点構造を有する必要はなく、たとえば汎用のリレーであってもよい。b接点18bは、本発明の「第2のリレーの第3の接点」に対応する。コイル18cは、本発明の「第2のリレーの第2のコイル」に対応する。
【0053】
図1に示した構成によれば、セーフティコントローラ10のフィードバックループ、すなわち、セーフティコントローラ10のFB出力端子21とFB入力端子22との間の経路にはリレー17のa接点17aのみ設けられる。a接点17aの抵抗は、半導体素子16がオンした時の抵抗に比べて著しく小さい。したがって、上記のフィードバックループには、電圧降下要素が実質上は存在しない。
【0054】
さらに、リレー18は、セーフティコントローラ10の安全出力と同期する補助出力によって駆動される。一方、リレー17は、リレー18のb接点18b、およびセーフティドライブ回路14の半導体素子16(すなわちセーフティドライブ回路14のFBモニタ出力)によって駆動される。
【0055】
この実施の形態では、セーフティコントローラ10の2つの安全出力端子のうちの少なくとも1つと、その安全出力端子に対応するセーフティドライブ回路14の安全入力端子との間に、強制ガイド接点構造を有するリレーのb接点が設けられていればよい。したがって、図1に示した構成に代わり、リレー17のb接点17bが、セーフティコントローラ10の安全出力(2)端子24と、セーフティドライブ回路14の安全入力(2)端子34との間に設けられていてもよい。あるいは、図1に示した構成において、強制ガイド接点構造を有する別のリレーのb接点を、セーフティコントローラ10の安全出力(2)端子24と、セーフティドライブ回路14の安全入力(2)端子34との間に設けてもよい。
【0056】
図2は、図1に示したセーフティドライブ回路の動作を説明するための図である。図2を参照して、「安全入力1」、「安全入力2」は、それぞれ、セーフティドライブ回路14の安全入力(1)端子33および安全入力(2)端子34に入力される信号を表わす。セーフティドライブ回路14の安全入力1,2の両方がHighレベルであるときには、セーフティドライブ回路14の出力が許可される。この場合、FBモニタ出力はオフ(OFF)である。セーフティドライブ回路14の安全入力1,2の両方がHighレベルでない場合、すなわち、安全入力1,2の少なくとも一方がLowレベルであるときには、セーフティドライブ回路14の出力が遮断される。この場合、FBモニタ出力はオン(ON)である。セーフティドライブ回路の出力とは、たとえば、セーフティドライブ回路からモータに供給される電力である。
【0057】
図3は、図1に示した安全制御システムの動作を説明するためのタイミング図である。図1および図3を参照して、まず、初期状態(時刻t1以前の状態)において、セーフティコントローラ10の安全出力1および安全出力2(図3において「安全出力1/2」とまとめて記載する)はいずれもLowレベルである。図3には示していないが、安全出力1/2がLowレベルであるため、FBモニタ出力はオンしている。すなわちセーフティドライブ回路14では半導体素子16がオンしてFBモニタ出力端子32からモニタ電圧が出力される。
【0058】
セーフティコントローラ10の補助出力がLowレベルであるので、コイル18cには電流が流れない。したがってリレー18(RY2)のb接点18bはクローズする。これにより、電流がセーフティドライブ回路14のFBモニタ出力端子32からリレー17(RY1)のコイル17cおよびリレー18のb接点18bを流れる。コイル17cに電流が流れることでリレー17がオンする。
【0059】
次に、時刻t1においてセーフティコントローラ10の安全入力端子26に入力される入力機器11からの信号(安全入力)がHighレベルになる。具体的にはユーザが入力機器11を操作することにより、安全入力がHighレベルになる。なお、この実施の形態では、「信号がHighレベルになる」ということは信号が出力されていることを意味する。以下の説明においても同様である。
【0060】
続いて時刻t2においてリレー17のa接点17aがクローズする。これによりフィードバックループがクローズするので、セーフティコントローラ10のFB入力端子22に入力される信号(FB入力)がHighレベルになる。FB入力がHighレベルになることにより、時刻t3において、セーフティコントローラ10の安全出力1/2がともにHighレベルになる。補助出力は安全出力1/2と同期してHighレベルになる。補助出力がHighレベルになることによって、リレー18のコイル18cに電流が流れる。したがってリレー18がオンする。
【0061】
リレー18がオンすることで、b接点18bがオープンとなる。これにより、リレー17のコイル17cに電流が流れなくなるので、時刻t4においてリレー17がオフする。リレー17がオフすることにより、a接点17aがオープンになるとともにb接点17bがクローズとなる。したがってセーフティドライブ回路14に入力される安全入力1/2がHighレベルとなる。安全入力1/2がHighレベルとなることでセーフティドライブ回路14の半導体素子16がオフする。したがってFBモニタ出力がオフする。
【0062】
なお、動作の順番が容易に理解されるように、図3では、時刻t1,t2,t3,t4を互いに離して示している。上記の動作がほぼ同時のタイミングで実行されていてもよい。
【0063】
図3および図15を対比すれば分かるように、この実施の形態に係る安全制御システムの動作は、従来の安全制御システムの動作と基本的に同じである。すなわち、FB入力がHighレベルになった後に安全出力1/2がHighレベルになる。安全出力1/2がHighレベルになることにより、安全入力1/2がHighレベルになる。したがって、既存のセーフティコントローラおよびセーフティドライブ回路をこの実施の形態に係る安全制御システムに適用することができる。
【0064】
さらに、この実施の形態によれば、セーフティコントローラ10のFBループ内に電圧降下要素がない。したがって複数台のセーフティドライブ回路を1台のセーフティコントローラに接続した場合に、従来の構成(図16を参照)に比べて、FBループにおける電圧降下を小さくすることができる。これにより、従来の構成に比べて、より多くの台数のセーフティドライブ回路を1台のセーフティコントローラに接続することができる。すなわち、1台のセーフティコントローラで監視可能なセーフティドライブ回路の台数を増やすことができる。
【0065】
図4は、複数台のセーフティドライブ回路が1台のセーフティコントローラに接続された、実施の形態1に係る安全制御システムの構成を示した図である。図1および図4を参照して、安全制御システム52は、セーフティドライブ回路14Aおよびリレー19が追加される点において安全制御システム51と異なる。セーフティドライブ回路14Aは、交流電源1Aからの交流電力をモータ2Aに供給したり、モータ2Aへの電力の供給を遮断したりする。なお、図4では交流電源1,1Aが示されているが、1つの交流電源からモータ2,2Aに交流電力が供給されてもよい。
【0066】
リレー19は、a接点19aと、b接点19bと、コイル19cとを有する。リレー17と同様に、a接点19aとb接点19bとは互いに連動するように機械的に拘束される。
【0067】
セーフティドライブ回路14Aは、セーフティドライブ回路14と同じ構成を有する。具体的には、セーフティドライブ回路14Aは、半導体素子16Aと、電圧入力端子31Aと、FBモニタ出力端子32Aと、安全入力(1)端子33Aと、安全入力(2)端子34Aとを有する。
【0068】
セーフティコントローラ10のFB出力端子21とFB入力端子22との間には、リレー17のa接点17aおよびリレー19のa接点19aが直列に電気的に接続される。安全入力(1)端子33Aは、セーフティドライブ回路14の安全入力(1)端子33とともにリレー17のb接点17bに接続される。安全入力(2)端子34Aは、セーフティドライブ回路14の安全入力(1)端子34とともにリレー19のb接点19bに接続される。
【0069】
すなわちリレー17のb接点17bは、セーフティコントローラ10の信号出力端子(安全出力(1)端子23)と、リレー17に対応するセーフティドライブ回路14の信号入力端子(安全入力(1)端子33)との間に電気的に接続される。リレー19のb接点19bは、セーフティコントローラ10の信号出力端子(安全出力(2)端子24)と、リレー19に対応するセーフティドライブ回路14Aの信号入力端子(安全入力(2)端子34A)との間に電気的に接続される。なお、リレー19のb接点19bは、安全入力(1)端子33と安全入力(1)端子33Aとを電気的に接続する経路に挿入されてもよい。
【0070】
コイル19cの一方端は、セーフティドライブ回路14AのFBモニタ出力端子32Aに接続され、コイル19cの他方端は、リレー18のb接点18bに接続される。したがって、コイル17c,19cは、リレー18のb接点18bに並列に接続される。
【0071】
図4に示した安全制御システム52の動作は、基本的に図3に示した動作と同じである。図3において、RY1をリレー17,19に置き換え、安全入力1/2を、セーフティドライブ回路14,14Aの安全入力1/2と置き換えればよい。
【0072】
図4では2台のセーフティドライブ回路が示されているが、この実施の形態によれば、3台以上のセーフティドライブ回路も1台のセーフティコントローラ10により監視可能である。セーフティドライブ回路の台数と同じ数のリレー(a接点とb接点とが機械的に連動することが要求される)を設け、それらのリレーのa接点をセーフティコントローラ10のFB出力端子21とFB入力端子22との間に直列に電気的に接続する。また、それらのリレーのb接点は、対応のセーフティドライブ回路の信号入力端子(安全入力(1)端子、安全入力(2)端子のいずれか)と、セーフティコントローラ10の信号出力端子(安全出力(1)端子23、安全入力(2)端子24)との間に電気的に接続する。それらのリレーのコイルを、リレー18の接点18bに並列に接続する。
【0073】
図14、図16等に示した従来の構成によれば、セーフティコントローラのFB入力端子の入力仕様(Highレベルと見なされる電圧)およびセーフティドライバのFBモニタ出力での電圧降下によって、1台のセーフティコントローラに接続可能なセーフティドライブ回路の台数が制限される。したがって、より多くの台数のセーフティドライブ回路に対する安全制御を実行するために、ユーザは、複数台のセーフティコントローラを準備して、各セーフティコントローラにセーフティドライブ回路を接続する必要があった。しかしながら、このような構成によれば、複数台のセーフティコントローラが互いに同期して動作するための処置が必要となる。
【0074】
これに対して実施の形態1によれば、リレーを追加するだけで、1台のセーフティコントローラにより監視および制御することができるセーフティドライブ回路の台数を従来よりも大幅に増やすことができる。したがって、実施の形態1によれば、より多くの台数のセーフティドライブ回路を1台のセーフティコントローラによって監視するための構成を、よりシンプルに構築することができるとともに、安価に実現することができる。
【0075】
さらに、この実施の形態では、a接点とb接点とが互いに連動するように機械的に拘束されたリレー(17,19)が用いられる。このリレーのa接点は、セーフティコントローラ10のFB出力端子21およびFB入力端子22の間に設けられる。b接点は、セーフティコントローラの安全出力端子と、対応するセーフティコントローラの安全入力端子との間に設けられる。このようなリレーを用いることで当該リレーの故障を見つけることが可能になる。
【0076】
図11に示したように、FB監視は、もともとコンタクタのa接点の溶着を見つけることが目的である。セーフティドライブ回路の場合にも、そのドライブの出力が故障したときには、FBモニタ出力がオフ状態を保持する。これによりセーフティコントローラの安全出力がオン状態のままになることを抑止して危険状態となることを防ぐ。仮にa接点の溶着といった故障が検出できない場合、FBモニタ出力がオフ状態を保持しても、セーフティコントローラからの安全出力がオンしてしまう可能性が生じる。
【0077】
これに対して実施の形態1によれば、リレー17のa接点17a(またはリレー19のa接点19a)が溶着した場合に、そのリレー17のb接点17b(またはリレー19のb接点19b)が強制的にオープンとなる。したがって、セーフティドライブ回路(14,14A)の安全入力の少なくとも1つがオフとなる。このためセーフティドライブ回路(14,14A)は動作しないので、動力源(モータ2)は動作しない。
【0078】
一方、リレー17のb接点17b(またはリレー19のb接点19b)が溶着した場合に、そのリレー17のa接点17a(またはリレー19のa接点19a)がオープンとなる。この場合、セーフティコントローラ10のFBループがオープンになるので、セーフティコントローラ10の安全出力1,2はともにLowレベルとなる。この場合は、セーフティドライブ回路14(14A)の出力が遮断される。
【0079】
一方、リレー18は汎用リレーでもよい。リレー18の故障として、オン故障およびオフ故障が考えられる。しかしオン故障およびオフ故障のいずれの場合であってもセーフティドライブ回路14(14A)の出力を遮断できる。
【0080】
たとえばリレー18のオン故障が生じた場合、リレー18はオンしたままになる。これによりリレー17(19)のオン状態が保持される。この場合には、リレー17(19)のb接点(17b,19b)がオープンのままに保持される。したがって、セーフティコントローラ10からセーフティドライブ(14,14A)への安全出力の伝達が遮断される。これにより、セーフティドライバ(14,14A)の各々では、安全入力1,2の両方ともにHighレベルになることがない。したがってセーフティドライバ(14,14A)の出力が遮断される。
【0081】
一方、リレー18のオフ故障が生じた場合、リレー18はオフしたままになる。これによりリレー17(19)のオフ状態が保持される。この場合には、リレー17(19)のa接点(17a,19a)がオープンのままに保持される。したがって、セーフティコントローラ10のFBループがオープンになる。この場合、セーフティコントローラ10からの安全出力1,2はLowレベルである。したがってセーフティドライバ(14,14A)の出力が遮断される。
【0082】
[実施の形態2]
図5は、本発明の第2の実施の形態に係る安全制御システムの構成の一例を示した図である。図1および図5を参照して、実施の形態2に係る安全制御システム53は、リレー18が省略されている点において実施の形態1に係る安全制御システム51と相違する。
【0083】
実施の形態1と同様にセーフティコントローラ10は、補助出力端子25を有していてもよい。実施の形態2では、補助出力端子25は必須ではない。このため補助出力端子25は図5に示されていない。リレー17のコイル17cの一方端はセーフティドライブ回路14のFBモニタ出力端子32に接続される。コイル17cの一方端は接地される。したがってこの実施の形態では、コイル17cはセーフティドライブ回路14のFBモニタ出力端子32と接地との間に電気的に接続される。実施の形態2に係る安全制御システム53の他の部分の構成は、実施の形態1に係る安全制御システム51の対応する部分の構成と同様であるので、以後の説明は繰り返さない。
【0084】
図6は、図5に示したセーフティドライブ回路の動作を説明するための図である。図2および図6を参照して、実施の形態2では、「安全入力1」、「安全入力2」のいずれか一方がHighレベルであり、他方がLowレベルである場合に、FBモニタ出力はオフとなる。この点において実施の形態2は実施の形態1と異なっている。
【0085】
図7は、図5に示した安全制御システムの動作を説明するためのタイミング図である。図5および図7を参照して、まず、初期状態(時刻t1a以前の状態)において、セーフティコントローラ10の安全出力1および安全出力2(図7において「安全出力1/2」とまとめて記載する)はいずれもLowレベルである。図7には示していないが、安全出力1/2がLowレベルであるため、FBモニタ出力はオンしている。
【0086】
FBモニタ出力はオンしているので、セーフティドライブ回路14のモニタ出力端子32からリレー17(RY1)のコイル17cに電流が流れる。これによりリレー17がオンする。
【0087】
時刻t1aにおいてセーフティコントローラ10の安全入力端子26に入力される安全入力がHighレベルになる。続いて時刻t2aにおいてリレー17のa接点17aがクローズする。これによりセーフティコントローラ10のFB入力端子22に入力される信号(FB入力)がHighレベルになる。FB入力がHighレベルになることにより、時刻t3aにおいて、セーフティコントローラ10の安全出力1/2がHighレベルになる。リレー17のa接点17aがクローズしているため、リレー17のb接点17bはオープンである。このため、セーフティドライブ回路14の安全入力1は、時刻t3aにおいてLowレベルである。一方、セーフティドライブ回路14の安全入力2は、Highレベルである。
【0088】
セーフティドライブ回路14の安全入力1,2がそれぞれLowレベルおよびHighレベルとなることで、セーフティドライブ回路14のFBモニタ出力がオフする。これにより、リレー17のコイル17cに電流が流れなくなるので、リレー17がオフする。
時刻t4aにおいて、リレー17のa接点17aがオープンになるとともにb接点17bがクローズとなる。したがってセーフティドライブ回路14に入力される安全入力1がHighレベルとなる。これにより、時刻t4a以後、安全入力1,2は、Highレベルである。安全入力1,2は、Highレベルであるときには、FBモニタ出力はLowレベルである。したがって、時刻t4a以後もFBモニタ出力はLowレベルである。
【0089】
図8は、複数台のセーフティドライブ回路が1台のセーフティコントローラに接続された、実施の形態2に係る安全制御システムの構成を示した図である。図5および図8を参照して、安全制御システム54は、セーフティドライブ回路14Aおよびリレー19が追加される点において安全制御システム53と異なる。なお、セーフティドライブ回路14Aの構成については、図4に示された構成と同様であるので以後の説明を繰り返さない。同じく、リレー19の構成についても図4に示された構成と同様であるので以後の説明を繰り返さない。
【0090】
図8に示す構成では、リレー17のb接点17bとリレー19のb接点19bとが、セーフティコントローラ10の安全出力(1)端子23とセーフティドライブ回路(14,14A)の安全入力(1)端子(33,33A)との間に直列に接続される。リレー19のコイル19cは、セーフティドライブ回路14AのFBモニタ出力端子32Aと接地とに電気的に接続される。図8に示した構成では、リレー17のコイル17cとリレー19のコイル19cとは、共通に接地されているが、別々に接地されていてもよい。
【0091】
図8に示した構成と図5に示した構成との対比から分かるように、実施の形態2に係る構成では、複数台のセーフティドライブ回路が1台のセーフティコントローラに接続された場合にもリレー18を不要とすることができる。
【0092】
図8に示した構成に代えて、リレー17のb接点17bとリレー19のb接点19bとが、セーフティコントローラ10の安全出力(2)端子24とセーフティドライブ回路(14,14A)の安全入力(2)端子(34,34A)との間に直列に接続されてもよい。ただし、実施の形態2では、セーフティドライブ回路(14,14A)は図7に示した関係に従って動作するので、セーフティドライブ回路(14,14A)の2つの安全入力端子のうちの一方は、b接点を介さずに、セーフティコントローラ10の対応する安全出力端子と直接的に接続することが必要となる。
【0093】
実施の形態2によれば、実施の形態1と同じ効果を得ることができる。したがって、より多くの台数のセーフティドライブ回路を1台のセーフティコントローラによって監視するための構成を、よりシンプルに構築することができるとともに、安価に実現することができる。
【0094】
さらに実施の形態2によれば、実施の形態1に比べて使用されるリレーの個数を少なくすることができる。
【0095】
今回開示された実施の形態はすべての点で例示であって制限的なものでないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0096】
1,1A,101 交流電源、2,2A,102 モータ、10,110 セーフティコントローラ、11 入力機器、14,14A,114 セーフティドライブ回路、16,16A,116 半導体素子、17〜19 リレー、17a,19a,112a,113a a接点、17b〜19b,112b,113b b接点、17c〜19c コイル、21,121 FB(フィードバック)出力端子、22,122 FB(フィードバック)入力端子、23,123 安全出力(1)端子 24,124 安全出力(2)端子、25 補助出力端子、26,126 安全入力端子、33,33A,133 安全入力(1)端子、34,34A,134 安全入力(2)端子、31,31A,131 電圧入力端子、32,32A,132 FBモニタ出力端子、51〜54,151,152 安全制御システム、103 電源ライン、105 サーキットブレーカ、111 非常停止スイッチ、112,113 コンタクタ、L1〜L3 ライン。
【特許請求の範囲】
【請求項1】
安全制御システムであって、
コントローラと、
動力源を駆動するための少なくとも1つのドライブ回路とを備え、
前記コントローラは、
前記少なくとも1つのドライブ回路の状態を前記コントローラが監視するためのフィードバックループを形成するためのフィードバック出力端子およびフィードバック入力端子と、
前記少なくとも1つのドライブ回路による前記動力源の駆動を許可するための出力信号を前記コントローラから出力するための信号出力端子とを含み、
前記ドライブ回路は、
前記コントローラの前記信号出力端子から出力された前記出力信号を前記ドライブ回路に入力するための信号入力端子と、
前記ドライブ回路から前記コントローラに前記ドライブ回路の状態を示すモニタ電圧を出力するためのモニタ出力端子と、
前記モニタ出力端子から出力される前記モニタ電圧を発生させる半導体素子と、
前記半導体素子に前記モニタ電圧を発生させるための電圧を前記半導体素子に入力するための電圧入力端子とを含み、
前記ドライブ回路は、前記コントローラからの前記出力信号が前記信号入力端子に入力される前は、前記モニタ出力端子から前記モニタ電圧を出力し、
前記安全制御システムは、
第1のコイルと、相補的に連動する第1の接点と第2の接点とを有し、前記第1のコイルの通電時には前記第1の接点が閉じるとともに前記第2の接点が開放し、前記第1のコイルの非通電時には前記第1の接点が開放するとともに前記第2の接点が閉じるように構成された少なくとも1つの第1のリレーをさらに備え、
前記第1のリレーの前記第1の接点は、前記コントローラの前記フィードバック出力端子と前記フィードバック入力端子とに電気的に接続され、
前記第1のリレーの前記第2の接点は、前記コントローラの前記信号出力端子と前記ドライブ回路の前記信号入力端子とに電気的に接続され、
前記第1のリレーの前記第1のコイルは、前記ドライブ回路の前記モニタ出力端子に電気的に接続される、安全制御システム。
【請求項2】
前記コントローラは、前記出力信号と同期した補助出力信号を前記コントローラから出力するための補助出力端子をさらに含み、
前記コントローラは、前記フィードバックループが閉じていることを確認した後に、前記出力信号を前記出力信号端子から出力するとともに、前記補助出力信号を前記補助出力端子から出力し、
前記安全制御システムは、
第2のコイルと、前記第2のコイルの通電時には開放する一方で前記第2のコイルの非通電時には閉じるように構成された第3の接点とを含む第2のリレーをさらに備え、
前記第1のリレーの前記第1のコイルと前記第2のリレーの前記第3の接点とは、前記ドライブ回路の前記モニタ出力端子と接地とに直列に電気的に接続され、
前記第2のリレーの前記第2のコイルは、前記コントローラの前記補助出力端子と接地とに電気的に接続される、請求項1に記載の安全制御システム。
【請求項3】
前記少なくとも1つのドライブ回路は、複数のドライブ回路であり、
前記少なくとも1つの第1のリレーは、前記複数のドライブ回路にそれぞれ対応して設けられた複数の第1のリレーであり、
前記複数の第1のリレーの各々の前記第1の接点は、前記コントローラの前記フィードバック出力端子と前記フィードバック入力端子との間に直列に電気的に接続され、
前記複数の第1のリレーの各々の前記第2の接点は、前記コントローラの前記信号出力端子と、前記複数のドライブ回路のうちの各前記第1のリレーに対応するドライブ回路の前記信号入力端子とに電気的に接続され、
前記複数の第1のリレーの各々の前記第1のコイルは、前記対応するドライブ回路の前記モニタ出力端子に電気的に接続されるとともに、前記第2のリレーの前記第3の接点に並列に接続される、請求項2に記載の安全制御システム。
【請求項4】
前記第1のリレーの前記第1のコイルは、前記ドライブ回路の前記モニタ出力端子と接地とに電気的に接続される、請求項1に記載の安全制御システム。
【請求項5】
前記少なくとも1つのドライブ回路は、複数のドライブ回路であり、
前記少なくとも1つの第1のリレーは、前記複数のドライブ回路にそれぞれ対応して設けられた複数の第1のリレーであり、
前記複数の第1のリレーの各々の前記第1の接点は、前記コントローラの前記フィードバック出力端子と前記フィードバック入力端子との間に直列に電気的に接続され、
前記複数の第1のリレーの各々の前記第2の接点は、互いに直列に電気的に接続されるとともに、前記コントローラの前記信号出力端子と、前記複数のドライブ回路のうちの各前記第1のリレーに対応するドライブ回路の前記信号入力端子との間に電気的に接続される、請求項4に記載の安全制御システム。
【請求項1】
安全制御システムであって、
コントローラと、
動力源を駆動するための少なくとも1つのドライブ回路とを備え、
前記コントローラは、
前記少なくとも1つのドライブ回路の状態を前記コントローラが監視するためのフィードバックループを形成するためのフィードバック出力端子およびフィードバック入力端子と、
前記少なくとも1つのドライブ回路による前記動力源の駆動を許可するための出力信号を前記コントローラから出力するための信号出力端子とを含み、
前記ドライブ回路は、
前記コントローラの前記信号出力端子から出力された前記出力信号を前記ドライブ回路に入力するための信号入力端子と、
前記ドライブ回路から前記コントローラに前記ドライブ回路の状態を示すモニタ電圧を出力するためのモニタ出力端子と、
前記モニタ出力端子から出力される前記モニタ電圧を発生させる半導体素子と、
前記半導体素子に前記モニタ電圧を発生させるための電圧を前記半導体素子に入力するための電圧入力端子とを含み、
前記ドライブ回路は、前記コントローラからの前記出力信号が前記信号入力端子に入力される前は、前記モニタ出力端子から前記モニタ電圧を出力し、
前記安全制御システムは、
第1のコイルと、相補的に連動する第1の接点と第2の接点とを有し、前記第1のコイルの通電時には前記第1の接点が閉じるとともに前記第2の接点が開放し、前記第1のコイルの非通電時には前記第1の接点が開放するとともに前記第2の接点が閉じるように構成された少なくとも1つの第1のリレーをさらに備え、
前記第1のリレーの前記第1の接点は、前記コントローラの前記フィードバック出力端子と前記フィードバック入力端子とに電気的に接続され、
前記第1のリレーの前記第2の接点は、前記コントローラの前記信号出力端子と前記ドライブ回路の前記信号入力端子とに電気的に接続され、
前記第1のリレーの前記第1のコイルは、前記ドライブ回路の前記モニタ出力端子に電気的に接続される、安全制御システム。
【請求項2】
前記コントローラは、前記出力信号と同期した補助出力信号を前記コントローラから出力するための補助出力端子をさらに含み、
前記コントローラは、前記フィードバックループが閉じていることを確認した後に、前記出力信号を前記出力信号端子から出力するとともに、前記補助出力信号を前記補助出力端子から出力し、
前記安全制御システムは、
第2のコイルと、前記第2のコイルの通電時には開放する一方で前記第2のコイルの非通電時には閉じるように構成された第3の接点とを含む第2のリレーをさらに備え、
前記第1のリレーの前記第1のコイルと前記第2のリレーの前記第3の接点とは、前記ドライブ回路の前記モニタ出力端子と接地とに直列に電気的に接続され、
前記第2のリレーの前記第2のコイルは、前記コントローラの前記補助出力端子と接地とに電気的に接続される、請求項1に記載の安全制御システム。
【請求項3】
前記少なくとも1つのドライブ回路は、複数のドライブ回路であり、
前記少なくとも1つの第1のリレーは、前記複数のドライブ回路にそれぞれ対応して設けられた複数の第1のリレーであり、
前記複数の第1のリレーの各々の前記第1の接点は、前記コントローラの前記フィードバック出力端子と前記フィードバック入力端子との間に直列に電気的に接続され、
前記複数の第1のリレーの各々の前記第2の接点は、前記コントローラの前記信号出力端子と、前記複数のドライブ回路のうちの各前記第1のリレーに対応するドライブ回路の前記信号入力端子とに電気的に接続され、
前記複数の第1のリレーの各々の前記第1のコイルは、前記対応するドライブ回路の前記モニタ出力端子に電気的に接続されるとともに、前記第2のリレーの前記第3の接点に並列に接続される、請求項2に記載の安全制御システム。
【請求項4】
前記第1のリレーの前記第1のコイルは、前記ドライブ回路の前記モニタ出力端子と接地とに電気的に接続される、請求項1に記載の安全制御システム。
【請求項5】
前記少なくとも1つのドライブ回路は、複数のドライブ回路であり、
前記少なくとも1つの第1のリレーは、前記複数のドライブ回路にそれぞれ対応して設けられた複数の第1のリレーであり、
前記複数の第1のリレーの各々の前記第1の接点は、前記コントローラの前記フィードバック出力端子と前記フィードバック入力端子との間に直列に電気的に接続され、
前記複数の第1のリレーの各々の前記第2の接点は、互いに直列に電気的に接続されるとともに、前記コントローラの前記信号出力端子と、前記複数のドライブ回路のうちの各前記第1のリレーに対応するドライブ回路の前記信号入力端子との間に電気的に接続される、請求項4に記載の安全制御システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−101459(P2013−101459A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244306(P2011−244306)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]