
定在波レーダおよび距離測定方法
【課題】 近距離でも、また、ターゲットとの相対速度が大きくても、定在波を用いてターゲットの位置を正確に測定できる定在波レーダおよび距離測定方法を提供する。
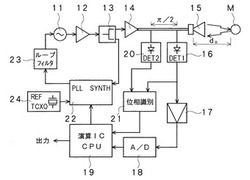
【解決手段】 発振周波数を掃引可能なVCO1に、一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期とする同調電圧を印加して周波数を掃引するように制御する周波数シンセサイザ22が接続されている。アンテナ15から放射され、ターゲットMから反射した反射波と定在波は、相互に90°位相をずらして設けられる第1および第2の検波器16、20により検波され、位相識別手段21により、ドップラー信号がプラス(近づく)かマイナス(離反する)か、を判定し、それに応じてドップラーシフトがプラスになるように、CPU19から周波数シンセサイザ22に信号を送り、検波した定在波の距離情報からドップラーシフト量を引き算して、距離d0を求める構成になっている。
【解決手段】 発振周波数を掃引可能なVCO1に、一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期とする同調電圧を印加して周波数を掃引するように制御する周波数シンセサイザ22が接続されている。アンテナ15から放射され、ターゲットMから反射した反射波と定在波は、相互に90°位相をずらして設けられる第1および第2の検波器16、20により検波され、位相識別手段21により、ドップラー信号がプラス(近づく)かマイナス(離反する)か、を判定し、それに応じてドップラーシフトがプラスになるように、CPU19から周波数シンセサイザ22に信号を送り、検波した定在波の距離情報からドップラーシフト量を引き算して、距離d0を求める構成になっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電磁波を空間に放射し、発振器とターゲットとの間に生じる定在波を利用してターゲットまでの距離を測定する、いわゆる定在波レーダおよびそれを用いた距離測定方法に関する。さらに詳しくは、アンテナとターゲットとの間に非常に大きな相対的な速度差があり、ターゲットとの距離が近い場合でも、その間の距離を正確に測定することができる定在波レーダおよび距離測定方法に関する。
【背景技術】
【0002】
距離測定方法として、一般的にパルスレーダ方式が知られている。この方法は、発振器から発射された電磁波のターゲットからの反射波を受信してその往復時間から距離を求める方法である。しかしながら、この方法では、一般的に近距離の測定が難しく、数十m以上でなければ測定することができないという問題がある。その問題を解決するため、発振器とターゲットとの間に生じる定在波を利用してターゲットまでの距離を測定する装置が提案されている(たとえば特許文献1参照)。
【0003】
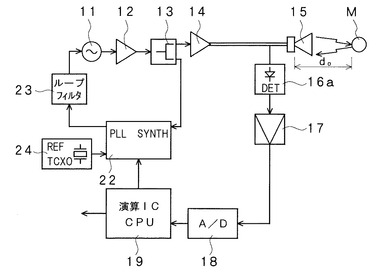
この装置は、たとえば図5にその一例のブロック図が示されるように、電圧制御発振器(以下、単にVCOともいう)11が発した電磁波が増幅器12、分波器13、増幅器14を介してアンテナ15から空間に放射され、ターゲットMに当たってその一部が反射すると進行波と反射波が干渉して空間に定在波が生じ、反射波と定在波は検波器(DET)16aにより検波され、増幅器17およびA−D変換器18を経て信号処理をするCPU19に送られる。この構成で、たとえば図6(a)に示されるような同調電圧(たとえばアップ波形の時間をTu、ダウン波形の時間をTdとして、Tu=Td=7msで、周波数変化fw=76MHz)の三角波または鋸歯を印加すると、同調電圧の一周期でVCOの発振周波数がfw変化する。なお、図6(a)に示される図では、直線的に変化する波形で示されているが、この例では、256または128段のステップ的に周波数を変化させてPLL動作をする構成になっており、CPU19からの信号に基づき、周波数シンセサイザ22によりVCO11への印加電圧を制御するようになっている。24はその基準周波数とする水晶発振器で、23は、周波数シンセサイザ22の位相比較器で発生する高調波成分を除去するループフィルタである。
【0004】
このような周期的に発振周波数が変る電磁波を放射して静止しているターゲットMで反射すると、進行波と反射波とにより図6(b)に示されるような定在波が形成される。この定在波周期fsから前述のCPUで計算することによりターゲットMとの間の距離dが次式(1)により求められる。
2d=c/fs (1)
なお、cは光速(3×108m/s)である。
【0005】
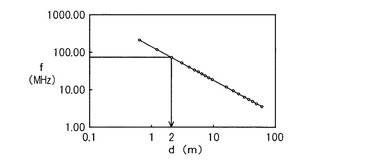
式(1)をグラフにすると図7に示されるようになり、たとえば掃引周波数fwを76MHzに設定すると、76MHzに一周期の定在波が存在する場合、すなわちターゲットM間での距離d=2mより近くの場合には測定することができない。なお、電磁波の中心周波数は、たとえば24.15GHz帯を用いることができる。
【0006】
一方、ターゲットMが移動している場合には、ドップラーシフトが定在波に重畳されるが、そのドップラーシフト量(周波数)は次式(2)および(3)により求めることができる。なお、(+)はターゲットとの距離が近づく場合、(−)は遠ざかる(離反する)場合を示している。
fd(+)=d0+(f0・v(m/s)・dt(s)/df(Hz) (2)
fd(−)=d0−(f0・v(m/s)・dt(s)/df(Hz) (3)
なお、距離のドップラーシフトによるズレ量Δdは、
Δd=(f0・v(m/s)・dt(s)/df (4)で得られる。
【0007】
従来の移動するターゲットMとの距離dを測定する場合、前述の図6(a)に示されるようなアップ波形とダウン波形とからなる3角波の電圧で発振周波数を変化させると、アップ波形の際にターゲットMが近づくと式(2)によりドップラーシフトが得られるが、ダウン波形のときにターゲットMが近づくと式(3)によりドップラーシフトが得られる。そのため、図6(a)に示されるアップ波形とダウン波形とを有する同調電圧で発振周波数を変えることにより、ターゲットMが近づく場合でも遠ざかる場合でも、擬似的にd0(+)とd0(−)とが得られ、両者の平均({式(2)+式(3)}/2)を取ることにより、正確な距離d0を得ることができる。
【0008】
この場合、ターゲットMの速度が、たとえば秒速3mで移動しているときに、アンテナとターゲットMとの距離d0が、たとえば0〜15mに変化する場合、ドップラー距離(
ドップラーシフト量を含めた距離)(+)とドップラー距離(−)の値は、表1に示されるようになる。
【0009】
【表1】

【0010】
表1から明らかなように、秒速3mでターゲットMが移動する場合、距離d0が7m、
8mでは、ドップラー距離d(−)が2m以下となり、しかも距離d0が6m以下では、
マイナス距離となり、あり得ない数値で、演算処理によっても求められない。
【特許文献1】特開2002−357656号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
前述のように、たとえば電圧制御による発振周波数変化が76MHzの場合、定在波の周波数が76MHz以上の測定をすることができないため、ターゲットMが静止している場合でも、76MHzのときの距離2m(図7参照)以下の距離を測定することができない。一方で電波法上、発振周波数変化も76MHz程度が限界で、これ以上上げることは難しい。さらに、ターゲットMがもし3m/s(10.8km/h)の速度で移動してい
ると、6m以下の距離を測定することができない。しかも、ターゲットMの移動速度がさらに早くなると、さらに測定可能な最短距離が大きくなり、近距離の測定をすることがで
きず、また、ターゲットMの速度が大きい場合さらに測定可能な最短距離が大きくなり、近距離で速度の大きいターゲットMの距離を測定することができないという問題がある。
【0012】
本発明は、このような問題を解決し、2m以下の近距離でも、さらにターゲットが高速度で移動する場合でも、定在波を用いてターゲットの位置を正確に測定することができる定在波レーダおよび距離測定方法を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明による定在波レーダは、(a)定められた帯域内で発振周波数を掃引可能な電圧制御発振器と、(b)該電圧制御発振器に一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期とする同調電圧を印加して周波数を掃引するように制御する周波数シンセサイザと、(c)前記電圧制御発振器から出力する電磁波を放射し、かつ、放射された進行波の一部がターゲットから反射する反射波を受信するアンテナと、(d)前記アンテナにより受信した反射波と、前記進行波と反射波とが干渉して発生する定在波を検波する第1の検波器と、(e)前記第1の検波器と位相を90度またはその奇数倍ずらして設けられ前記反射波を検波する第2の検波器と、(f)前記一定電圧で前記電圧制御発振器から発生する電磁波の反射波を検波し、前記第1の検波器および第2の検波器の出力から得られるドップラー信号により、前記ターゲットが近づく信号か遠ざかる信号かを識別する位相識別手段と、(g)該位相識別手段の出力に基づき、ドップラーシフトの量が0またはプラスになるような勾配の前記アップ波形またはダウン波形の掃引電圧を前記電圧制御発振器に印加するように前記周波数シンセサイザを制御すると共に、前記ドップラー信号から算出したドップラーシフトによる距離のズレを、前記第1の検波器により得られる定在波信号より求められる距離から減算することにより前記ターゲットまでの距離を算出する信号処理手段とを有することを特徴とする。
【0014】
また、本発明による距離測定方法は、発振器から出力する電磁波を周波数掃引してアンテナから放射し、該放射された進行波がターゲットに反射して、ターゲットとの間に形成される定在波を検波し、該定在波信号から前記ターゲットまでの距離を計測する距離測定方法において、前記周波数掃引する前記発振器の制御電圧を、一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期として印加し、前記一定電圧で前記電圧制御発振器から発生する電磁波の反射波によりドップラー信号を検出し、該ドップラー信号が前記ターゲットがアンテナに近づく信号か遠ざかる信号かにより、ドップラーシフト量が0またはプラスになるように、前記アップ波形またはダウン波形のいずれかの前記制御電圧を前記発振器に印加すると共に、前記ドップラー信号からドップラーシフトによる距離のズレを求め、前記定在波信号により得られるターゲットとの距離から前記ドップラーシフトによる距離のズレを除去することにより、前記ターゲットとの間の距離を求めることを特徴とする。
【発明の効果】
【0015】
本発明によれば、検波器に第1および第2の検波器の2個の検波器が用いられ、その2個の検波器が位相を90度またはその奇数倍ずらして設けられているため、その2個の検波器による検波出力により、一定の周波数でのドップラー信号を検出することができ、ターゲットMとの間隔が近づいているか、離反しているか、およびドップラー周波数を検出することができる。そして、そのドップラー信号の検出に応じて、VCOへの掃引電圧をドップラーシフト量が常にプラスとなるように制御電圧を印加、すなわち相対距離が近づいている場合にはアップ波形を、遠ざかっている場合にはダウン波形を印加しているため、ドップラーシフトを含めたターゲットまでの距離は、ターゲットが静止して相対速度がない場合の実際の距離よりもドップラーシフト量だけプラスとして求められる。その結果、ターゲットとの距離が近くてターゲットの相対速度が大きい場合でも、フーリエ変換による計算が不能になることなく、ドップラーシフトを含めた正確な距離を求めることがで
きる。そして、その距離から前述のドップラー周波数により得られるドップラーシフト量を差し引くことにより、ドップラーシフトの影響を除去した正確なターゲットまでの距離を求めることができる。
【発明を実施するための最良の形態】
【0016】
つぎに、図面を参照しながら本発明の定在波レーダおよび距離の測定方法について説明をする。本発明による定在波レーダは、図1にその一実施形態の概要を示すブロック図が示されるように、定められた帯域内で発振周波数を掃引可能な電圧制御発振器(VCO)11に、一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期とする同調電圧を印加して周波数を掃引するように制御する周波数シンセサイザ22が接続され、発生した電磁波がアンテナ15から放射されるようになっている。アンテナ15から放射された進行波はターゲットMで反射し、その反射波と進行波とが干渉して空間に定在波が形成される。アンテナ15により受信された反射波と定在波は相互に位相を90°またはその奇数倍ずらして設けた第1の検波器(DET1)16および第2の検波器(DET2)20により検波され、位相識別手段21により、一定周波数での両者の位相を比較することによりドップラー信号が得られてCPU19に送られると共に、第1の検波器16で検波された定在波信号が増幅器17およびA/D変換器18を介してCPU19に送られるようになっている。
【0017】
そして、CPU19では、位相識別手段21の出力に基づき、ドップラーシフトの量が0またはプラスになるようなアップ波形またはダウン波形の掃引電圧をVCO11に印加するように周波数シンセサイザ22を制御すると共にドップラーシフトの量を計算し、第1の検波器16により得られる定在波信号からフーリエ変換による計算によりターゲットMまでのドップラーシフト量を含んだ距離dを求め、その値からドップラーシフトの量を減算することにより、ターゲットMまでのドップラーシフトを除去した距離d0を算出す
るようになっている。
【0018】
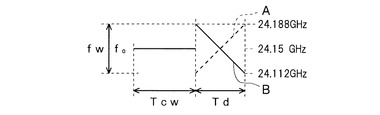
VCO11としては、たとえばトランジスタ発振器などを用いることができ、マイクロ波やミリ波などの電波を発振するものが好ましい。このVCO11には、同調用電圧が印加されるようになっており、同調用電圧により発振周波数が掃引されるようになっている。本発明では、この同調用電圧が、図2に示されるように、Tcwの間一定電圧で、その後のTdの間アップ波形Aまたはダウン波形Bが印加され、発振周波数がfw変化するように、周波数シンセサイザ22からの信号により制御されている。変化する周波数fwは、たとえば76MHzで、発振周波数の中心周波数f0は、たとえば24.15GHzで、アップ波形またはダウン波形の周波数変化は、この76MHzを256段階または128段階程度のステップ波形とすることができる。一定電圧およびアップ波形またはダウン波形を印加する時間TcwおよびTdは、従来の三角波と同様に、それぞれ7ms程度に設定することができるが、この時間は自由に設定される。このアップ波形を印加するか、ダウン波形を印加するかについては、後述する。
【0019】
増幅器12および14は、VCO11で発振する電磁波の出力を増大するもので、通常の増幅器を用いることができ、なくても構わない。また、分波器13は、周波数シンセサイザ22に一部の電力を取り出すためのもので、通常の分波器を用いることができる。アンテナ15としては、通常のアンテナを用いることができ、小型のセラミックアンテナからホーンアンテナなど、目的に応じて種々のアンテナを用いることができる。また、第1および第2の検波器16、20もショットキーバリアダイオードなど一般的な検波用ダイオードなどを用いることができるが、本発明では、この2つの検波器16、20が設けられる間隔が、前述の例では24.15GHzの位相が90度(π/2)またはその奇数倍
だけずれる間隔になるように設けられている。
【0020】
第1および第2の検波器16、20で検波された一定周波数f0(42.15GHz)の反射波の検波信号は、位相識別手段21に送られ、反射波の位相が進んでいるか、遅れているかにより、ターゲットMとの間隔が近づいているか、遠ざかっているかを判断して、CPU19(信号処理手段)に判断結果を送る。第1の検波器16で検波された定在波信号は、増幅器17を経てA/D変換器18でデジタル信号に変換され、CPU19(信号処理手段)に送られて定在波信号の周波数を計算し、前述の式(1)によりアンテナ15とターゲットMとの間の距離dが計算される。なお、ターゲットが近づいているか遠ざかっているかの判断およびその距離の計算についての詳細は、後述する。CPU19からは、アンテナ15とターゲットMとの相対速度が近づいている場合には、アップ波形を、逆の場合にはダウン波形をVCO11に印加するように周波数シンセサイザ22に信号を送るようになっており、周波数シンセサイザ22では、基準周波数発振器24に基づき所定の周波数で発振するように制御されている。なお、周波数シンセサイザ22では、通常の周波数シンセサイザと同様に、基準発振器24の周波数の逓倍やVCO11の発振周波数の分周などにより周波数を合せて、基準発振器24の信号との位相を比較するように構成されている。なお、ループフィルタは、周波数シンセサイザ22での位相比較などにより発生する高調波成分などを除去するものである。
【0021】
つぎに、この定在波レーダの動作について説明をする。前述のように、VCO11には図2に示されるような一定の周波数f0となる同調電圧(時間:Tcw)と、アップ波形
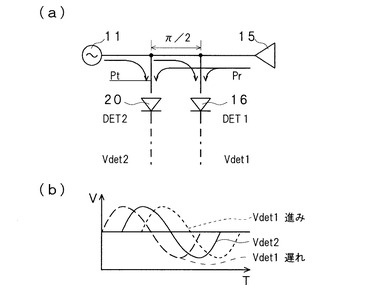
Aまたはダウン波形Bの同調電圧(時間:Td)が印加されるようになっている。この周波数が一定の同調電圧で発振した電磁波Ptは、図3(a)に示されるように、その一部が直接第1および第2の検波器16、20に入射すると共に、アンテナ15から放射されターゲットMで反射して戻ってきた反射波Prが第1および第2の検波器16、20により検波される。この第2の検波器20により検波される波形は、図3(b)のVdet2となり、第1の検波器16で検波される波形は、前述のように、両検波器16、20の間隔が90度またはその奇数倍の位相差になっており、ドップラー効果が生じている場合、進行方向で基準Vdet2に対して、遅れ位相または進み位相となる。そして、遅れ位相の場合図3(b)に示される「Vdet1遅れ」のようになり、進み位相の場合図3(b)に示される「Vdet1進み」のようになる。この基準位相に対して送れているか、進んでいるかは、F/F(フリップフロップ)回路などにより容易に識別することができ、検波信号が遅れ位相か、進み位相かを知ることができる。
【0022】
すなわち、第1の検波器16による検波信号の位相が基準位相に対して進んでいるときはアンテナ15とターゲットMとの距離が近づいていることを、位相が遅れている場合にはその逆であることを示している。この情報およびその検波信号の周期(周波数)の情報は、CPU19に送られる。なお、このようなドップラー信号が得られない場合は、ターゲットMが静止しているか、ターゲットが存在しない場合で、後述する掃引波形はアップ波形でもダウン波形でもどちらでもよく、その場合に定在波波形が得られない場合は、ターゲットが存在しないことになる。
【0023】
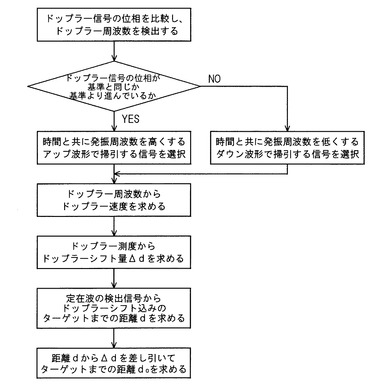
CPU19では、位相識別手段21からの上記情報に基づき、ドップラー信号の位相が進んでいる場合、すなわちアンテナ15とターゲットMとの距離が近づいている場合には、前述の図2に示されるVCO1の掃引電圧にアップ波形Aを印加するように、また、ドップラー信号の位相が逆の場合には、ダウン波形Bの掃引電圧を印加するように、換言するとドップラー信号がプラスにシフトとなるように、周波数シンセサイザ22に信号を送ると共に、ドップラー周波数fdpから相対速度を算出する。すなわち、ドップラー速度vは、次式(5)
fdp=2v/λ (5)
により得られる。なお、λは一定周波数f0、前述の例では24.15GHzの波長である。
【0024】
さらに、CPU19では、第1の検波器16で検波した定在波の周期から前述の式(1)により距離が得られるため、得られた関数をフーリエ変換することによりターゲットMまでの距離dを計算する。この場合、ターゲットMとアンテナ15との間に相対速度がある場合、距離の関数である定在波信号に速度に比例したドップラー信号が重畳するので、定在波検波信号に変化が生じる。そのため、前述のドップラー速度から得られるドップラーシフト量Δdを前述の式(4)により計算して、その値を減ずることにより、ドップラーシフト量を除去したターゲットMまでの距離d0を正確に求めることができる。この一
連の処理をフローチャートにすると、図4に示されるようになる。
【0025】
本発明によれば、予めドップラー信号を検出して、アンテナとターゲットとの相対速度がプラス(近づいている)か、マイナス(遠ざかっている)か、を検出し、そのドップラー信号に応じてVCO11を掃引する電圧をアップ波形かダウン波形かを選択して、常にドップラーシフト量がプラスになるようにしているため、アンテナとターゲットとの距離が非常に小さくなり、しかも相対速度が大きい場合でも、ドップラーシフト量を含んだ両者間の距離は常にプラスで測定され、その値から予め検出したドップラー信号より求められるドップラーシフト量を差し引くことにより、ドップラーシフト量を除去した両者間の正確な距離d0を検出することができる。
【図面の簡単な説明】
【0026】
【図1】本発明による定在波レーダの一実施形態の構成を示すブロック図である。
【図2】図1のVCOの同調を掃引する波形の説明図である。
【図3】図1の構成で、ターゲットの接近または離反により、第1および第2の検波器で検出される波形の違いを説明する図である。
【図4】ドップラー信号に応じてアップ波形で掃引するか、ダウン波形で掃引するか、および定在波の波形から距離d0を求めるCPUでの処理のフローチャートである。
【図5】従来の定在波レーダの構成例を示すブロック図である。
【図6】従来の定在波レーダで、発振周波数を掃引する電圧波形の一例を示す図である。
【図7】ターゲットとの距離dに対する定在波の周波数との関係を示す図である。
【符号の説明】
【0027】
11 VCO
15 アンテナ
16 第1の検波器
19 CPU(信号処理手段)
20 第2の検波器
21 位相識別手段
22 周波数シンセサイザ
M ターゲット
【技術分野】
【0001】
本発明は、電磁波を空間に放射し、発振器とターゲットとの間に生じる定在波を利用してターゲットまでの距離を測定する、いわゆる定在波レーダおよびそれを用いた距離測定方法に関する。さらに詳しくは、アンテナとターゲットとの間に非常に大きな相対的な速度差があり、ターゲットとの距離が近い場合でも、その間の距離を正確に測定することができる定在波レーダおよび距離測定方法に関する。
【背景技術】
【0002】
距離測定方法として、一般的にパルスレーダ方式が知られている。この方法は、発振器から発射された電磁波のターゲットからの反射波を受信してその往復時間から距離を求める方法である。しかしながら、この方法では、一般的に近距離の測定が難しく、数十m以上でなければ測定することができないという問題がある。その問題を解決するため、発振器とターゲットとの間に生じる定在波を利用してターゲットまでの距離を測定する装置が提案されている(たとえば特許文献1参照)。
【0003】
この装置は、たとえば図5にその一例のブロック図が示されるように、電圧制御発振器(以下、単にVCOともいう)11が発した電磁波が増幅器12、分波器13、増幅器14を介してアンテナ15から空間に放射され、ターゲットMに当たってその一部が反射すると進行波と反射波が干渉して空間に定在波が生じ、反射波と定在波は検波器(DET)16aにより検波され、増幅器17およびA−D変換器18を経て信号処理をするCPU19に送られる。この構成で、たとえば図6(a)に示されるような同調電圧(たとえばアップ波形の時間をTu、ダウン波形の時間をTdとして、Tu=Td=7msで、周波数変化fw=76MHz)の三角波または鋸歯を印加すると、同調電圧の一周期でVCOの発振周波数がfw変化する。なお、図6(a)に示される図では、直線的に変化する波形で示されているが、この例では、256または128段のステップ的に周波数を変化させてPLL動作をする構成になっており、CPU19からの信号に基づき、周波数シンセサイザ22によりVCO11への印加電圧を制御するようになっている。24はその基準周波数とする水晶発振器で、23は、周波数シンセサイザ22の位相比較器で発生する高調波成分を除去するループフィルタである。
【0004】
このような周期的に発振周波数が変る電磁波を放射して静止しているターゲットMで反射すると、進行波と反射波とにより図6(b)に示されるような定在波が形成される。この定在波周期fsから前述のCPUで計算することによりターゲットMとの間の距離dが次式(1)により求められる。
2d=c/fs (1)
なお、cは光速(3×108m/s)である。
【0005】
式(1)をグラフにすると図7に示されるようになり、たとえば掃引周波数fwを76MHzに設定すると、76MHzに一周期の定在波が存在する場合、すなわちターゲットM間での距離d=2mより近くの場合には測定することができない。なお、電磁波の中心周波数は、たとえば24.15GHz帯を用いることができる。
【0006】
一方、ターゲットMが移動している場合には、ドップラーシフトが定在波に重畳されるが、そのドップラーシフト量(周波数)は次式(2)および(3)により求めることができる。なお、(+)はターゲットとの距離が近づく場合、(−)は遠ざかる(離反する)場合を示している。
fd(+)=d0+(f0・v(m/s)・dt(s)/df(Hz) (2)
fd(−)=d0−(f0・v(m/s)・dt(s)/df(Hz) (3)
なお、距離のドップラーシフトによるズレ量Δdは、
Δd=(f0・v(m/s)・dt(s)/df (4)で得られる。
【0007】
従来の移動するターゲットMとの距離dを測定する場合、前述の図6(a)に示されるようなアップ波形とダウン波形とからなる3角波の電圧で発振周波数を変化させると、アップ波形の際にターゲットMが近づくと式(2)によりドップラーシフトが得られるが、ダウン波形のときにターゲットMが近づくと式(3)によりドップラーシフトが得られる。そのため、図6(a)に示されるアップ波形とダウン波形とを有する同調電圧で発振周波数を変えることにより、ターゲットMが近づく場合でも遠ざかる場合でも、擬似的にd0(+)とd0(−)とが得られ、両者の平均({式(2)+式(3)}/2)を取ることにより、正確な距離d0を得ることができる。
【0008】
この場合、ターゲットMの速度が、たとえば秒速3mで移動しているときに、アンテナとターゲットMとの距離d0が、たとえば0〜15mに変化する場合、ドップラー距離(
ドップラーシフト量を含めた距離)(+)とドップラー距離(−)の値は、表1に示されるようになる。
【0009】
【表1】
【0010】
表1から明らかなように、秒速3mでターゲットMが移動する場合、距離d0が7m、
8mでは、ドップラー距離d(−)が2m以下となり、しかも距離d0が6m以下では、
マイナス距離となり、あり得ない数値で、演算処理によっても求められない。
【特許文献1】特開2002−357656号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
前述のように、たとえば電圧制御による発振周波数変化が76MHzの場合、定在波の周波数が76MHz以上の測定をすることができないため、ターゲットMが静止している場合でも、76MHzのときの距離2m(図7参照)以下の距離を測定することができない。一方で電波法上、発振周波数変化も76MHz程度が限界で、これ以上上げることは難しい。さらに、ターゲットMがもし3m/s(10.8km/h)の速度で移動してい
ると、6m以下の距離を測定することができない。しかも、ターゲットMの移動速度がさらに早くなると、さらに測定可能な最短距離が大きくなり、近距離の測定をすることがで
きず、また、ターゲットMの速度が大きい場合さらに測定可能な最短距離が大きくなり、近距離で速度の大きいターゲットMの距離を測定することができないという問題がある。
【0012】
本発明は、このような問題を解決し、2m以下の近距離でも、さらにターゲットが高速度で移動する場合でも、定在波を用いてターゲットの位置を正確に測定することができる定在波レーダおよび距離測定方法を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明による定在波レーダは、(a)定められた帯域内で発振周波数を掃引可能な電圧制御発振器と、(b)該電圧制御発振器に一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期とする同調電圧を印加して周波数を掃引するように制御する周波数シンセサイザと、(c)前記電圧制御発振器から出力する電磁波を放射し、かつ、放射された進行波の一部がターゲットから反射する反射波を受信するアンテナと、(d)前記アンテナにより受信した反射波と、前記進行波と反射波とが干渉して発生する定在波を検波する第1の検波器と、(e)前記第1の検波器と位相を90度またはその奇数倍ずらして設けられ前記反射波を検波する第2の検波器と、(f)前記一定電圧で前記電圧制御発振器から発生する電磁波の反射波を検波し、前記第1の検波器および第2の検波器の出力から得られるドップラー信号により、前記ターゲットが近づく信号か遠ざかる信号かを識別する位相識別手段と、(g)該位相識別手段の出力に基づき、ドップラーシフトの量が0またはプラスになるような勾配の前記アップ波形またはダウン波形の掃引電圧を前記電圧制御発振器に印加するように前記周波数シンセサイザを制御すると共に、前記ドップラー信号から算出したドップラーシフトによる距離のズレを、前記第1の検波器により得られる定在波信号より求められる距離から減算することにより前記ターゲットまでの距離を算出する信号処理手段とを有することを特徴とする。
【0014】
また、本発明による距離測定方法は、発振器から出力する電磁波を周波数掃引してアンテナから放射し、該放射された進行波がターゲットに反射して、ターゲットとの間に形成される定在波を検波し、該定在波信号から前記ターゲットまでの距離を計測する距離測定方法において、前記周波数掃引する前記発振器の制御電圧を、一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期として印加し、前記一定電圧で前記電圧制御発振器から発生する電磁波の反射波によりドップラー信号を検出し、該ドップラー信号が前記ターゲットがアンテナに近づく信号か遠ざかる信号かにより、ドップラーシフト量が0またはプラスになるように、前記アップ波形またはダウン波形のいずれかの前記制御電圧を前記発振器に印加すると共に、前記ドップラー信号からドップラーシフトによる距離のズレを求め、前記定在波信号により得られるターゲットとの距離から前記ドップラーシフトによる距離のズレを除去することにより、前記ターゲットとの間の距離を求めることを特徴とする。
【発明の効果】
【0015】
本発明によれば、検波器に第1および第2の検波器の2個の検波器が用いられ、その2個の検波器が位相を90度またはその奇数倍ずらして設けられているため、その2個の検波器による検波出力により、一定の周波数でのドップラー信号を検出することができ、ターゲットMとの間隔が近づいているか、離反しているか、およびドップラー周波数を検出することができる。そして、そのドップラー信号の検出に応じて、VCOへの掃引電圧をドップラーシフト量が常にプラスとなるように制御電圧を印加、すなわち相対距離が近づいている場合にはアップ波形を、遠ざかっている場合にはダウン波形を印加しているため、ドップラーシフトを含めたターゲットまでの距離は、ターゲットが静止して相対速度がない場合の実際の距離よりもドップラーシフト量だけプラスとして求められる。その結果、ターゲットとの距離が近くてターゲットの相対速度が大きい場合でも、フーリエ変換による計算が不能になることなく、ドップラーシフトを含めた正確な距離を求めることがで
きる。そして、その距離から前述のドップラー周波数により得られるドップラーシフト量を差し引くことにより、ドップラーシフトの影響を除去した正確なターゲットまでの距離を求めることができる。
【発明を実施するための最良の形態】
【0016】
つぎに、図面を参照しながら本発明の定在波レーダおよび距離の測定方法について説明をする。本発明による定在波レーダは、図1にその一実施形態の概要を示すブロック図が示されるように、定められた帯域内で発振周波数を掃引可能な電圧制御発振器(VCO)11に、一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期とする同調電圧を印加して周波数を掃引するように制御する周波数シンセサイザ22が接続され、発生した電磁波がアンテナ15から放射されるようになっている。アンテナ15から放射された進行波はターゲットMで反射し、その反射波と進行波とが干渉して空間に定在波が形成される。アンテナ15により受信された反射波と定在波は相互に位相を90°またはその奇数倍ずらして設けた第1の検波器(DET1)16および第2の検波器(DET2)20により検波され、位相識別手段21により、一定周波数での両者の位相を比較することによりドップラー信号が得られてCPU19に送られると共に、第1の検波器16で検波された定在波信号が増幅器17およびA/D変換器18を介してCPU19に送られるようになっている。
【0017】
そして、CPU19では、位相識別手段21の出力に基づき、ドップラーシフトの量が0またはプラスになるようなアップ波形またはダウン波形の掃引電圧をVCO11に印加するように周波数シンセサイザ22を制御すると共にドップラーシフトの量を計算し、第1の検波器16により得られる定在波信号からフーリエ変換による計算によりターゲットMまでのドップラーシフト量を含んだ距離dを求め、その値からドップラーシフトの量を減算することにより、ターゲットMまでのドップラーシフトを除去した距離d0を算出す
るようになっている。
【0018】
VCO11としては、たとえばトランジスタ発振器などを用いることができ、マイクロ波やミリ波などの電波を発振するものが好ましい。このVCO11には、同調用電圧が印加されるようになっており、同調用電圧により発振周波数が掃引されるようになっている。本発明では、この同調用電圧が、図2に示されるように、Tcwの間一定電圧で、その後のTdの間アップ波形Aまたはダウン波形Bが印加され、発振周波数がfw変化するように、周波数シンセサイザ22からの信号により制御されている。変化する周波数fwは、たとえば76MHzで、発振周波数の中心周波数f0は、たとえば24.15GHzで、アップ波形またはダウン波形の周波数変化は、この76MHzを256段階または128段階程度のステップ波形とすることができる。一定電圧およびアップ波形またはダウン波形を印加する時間TcwおよびTdは、従来の三角波と同様に、それぞれ7ms程度に設定することができるが、この時間は自由に設定される。このアップ波形を印加するか、ダウン波形を印加するかについては、後述する。
【0019】
増幅器12および14は、VCO11で発振する電磁波の出力を増大するもので、通常の増幅器を用いることができ、なくても構わない。また、分波器13は、周波数シンセサイザ22に一部の電力を取り出すためのもので、通常の分波器を用いることができる。アンテナ15としては、通常のアンテナを用いることができ、小型のセラミックアンテナからホーンアンテナなど、目的に応じて種々のアンテナを用いることができる。また、第1および第2の検波器16、20もショットキーバリアダイオードなど一般的な検波用ダイオードなどを用いることができるが、本発明では、この2つの検波器16、20が設けられる間隔が、前述の例では24.15GHzの位相が90度(π/2)またはその奇数倍
だけずれる間隔になるように設けられている。
【0020】
第1および第2の検波器16、20で検波された一定周波数f0(42.15GHz)の反射波の検波信号は、位相識別手段21に送られ、反射波の位相が進んでいるか、遅れているかにより、ターゲットMとの間隔が近づいているか、遠ざかっているかを判断して、CPU19(信号処理手段)に判断結果を送る。第1の検波器16で検波された定在波信号は、増幅器17を経てA/D変換器18でデジタル信号に変換され、CPU19(信号処理手段)に送られて定在波信号の周波数を計算し、前述の式(1)によりアンテナ15とターゲットMとの間の距離dが計算される。なお、ターゲットが近づいているか遠ざかっているかの判断およびその距離の計算についての詳細は、後述する。CPU19からは、アンテナ15とターゲットMとの相対速度が近づいている場合には、アップ波形を、逆の場合にはダウン波形をVCO11に印加するように周波数シンセサイザ22に信号を送るようになっており、周波数シンセサイザ22では、基準周波数発振器24に基づき所定の周波数で発振するように制御されている。なお、周波数シンセサイザ22では、通常の周波数シンセサイザと同様に、基準発振器24の周波数の逓倍やVCO11の発振周波数の分周などにより周波数を合せて、基準発振器24の信号との位相を比較するように構成されている。なお、ループフィルタは、周波数シンセサイザ22での位相比較などにより発生する高調波成分などを除去するものである。
【0021】
つぎに、この定在波レーダの動作について説明をする。前述のように、VCO11には図2に示されるような一定の周波数f0となる同調電圧(時間:Tcw)と、アップ波形
Aまたはダウン波形Bの同調電圧(時間:Td)が印加されるようになっている。この周波数が一定の同調電圧で発振した電磁波Ptは、図3(a)に示されるように、その一部が直接第1および第2の検波器16、20に入射すると共に、アンテナ15から放射されターゲットMで反射して戻ってきた反射波Prが第1および第2の検波器16、20により検波される。この第2の検波器20により検波される波形は、図3(b)のVdet2となり、第1の検波器16で検波される波形は、前述のように、両検波器16、20の間隔が90度またはその奇数倍の位相差になっており、ドップラー効果が生じている場合、進行方向で基準Vdet2に対して、遅れ位相または進み位相となる。そして、遅れ位相の場合図3(b)に示される「Vdet1遅れ」のようになり、進み位相の場合図3(b)に示される「Vdet1進み」のようになる。この基準位相に対して送れているか、進んでいるかは、F/F(フリップフロップ)回路などにより容易に識別することができ、検波信号が遅れ位相か、進み位相かを知ることができる。
【0022】
すなわち、第1の検波器16による検波信号の位相が基準位相に対して進んでいるときはアンテナ15とターゲットMとの距離が近づいていることを、位相が遅れている場合にはその逆であることを示している。この情報およびその検波信号の周期(周波数)の情報は、CPU19に送られる。なお、このようなドップラー信号が得られない場合は、ターゲットMが静止しているか、ターゲットが存在しない場合で、後述する掃引波形はアップ波形でもダウン波形でもどちらでもよく、その場合に定在波波形が得られない場合は、ターゲットが存在しないことになる。
【0023】
CPU19では、位相識別手段21からの上記情報に基づき、ドップラー信号の位相が進んでいる場合、すなわちアンテナ15とターゲットMとの距離が近づいている場合には、前述の図2に示されるVCO1の掃引電圧にアップ波形Aを印加するように、また、ドップラー信号の位相が逆の場合には、ダウン波形Bの掃引電圧を印加するように、換言するとドップラー信号がプラスにシフトとなるように、周波数シンセサイザ22に信号を送ると共に、ドップラー周波数fdpから相対速度を算出する。すなわち、ドップラー速度vは、次式(5)
fdp=2v/λ (5)
により得られる。なお、λは一定周波数f0、前述の例では24.15GHzの波長である。
【0024】
さらに、CPU19では、第1の検波器16で検波した定在波の周期から前述の式(1)により距離が得られるため、得られた関数をフーリエ変換することによりターゲットMまでの距離dを計算する。この場合、ターゲットMとアンテナ15との間に相対速度がある場合、距離の関数である定在波信号に速度に比例したドップラー信号が重畳するので、定在波検波信号に変化が生じる。そのため、前述のドップラー速度から得られるドップラーシフト量Δdを前述の式(4)により計算して、その値を減ずることにより、ドップラーシフト量を除去したターゲットMまでの距離d0を正確に求めることができる。この一
連の処理をフローチャートにすると、図4に示されるようになる。
【0025】
本発明によれば、予めドップラー信号を検出して、アンテナとターゲットとの相対速度がプラス(近づいている)か、マイナス(遠ざかっている)か、を検出し、そのドップラー信号に応じてVCO11を掃引する電圧をアップ波形かダウン波形かを選択して、常にドップラーシフト量がプラスになるようにしているため、アンテナとターゲットとの距離が非常に小さくなり、しかも相対速度が大きい場合でも、ドップラーシフト量を含んだ両者間の距離は常にプラスで測定され、その値から予め検出したドップラー信号より求められるドップラーシフト量を差し引くことにより、ドップラーシフト量を除去した両者間の正確な距離d0を検出することができる。
【図面の簡単な説明】
【0026】
【図1】本発明による定在波レーダの一実施形態の構成を示すブロック図である。
【図2】図1のVCOの同調を掃引する波形の説明図である。
【図3】図1の構成で、ターゲットの接近または離反により、第1および第2の検波器で検出される波形の違いを説明する図である。
【図4】ドップラー信号に応じてアップ波形で掃引するか、ダウン波形で掃引するか、および定在波の波形から距離d0を求めるCPUでの処理のフローチャートである。
【図5】従来の定在波レーダの構成例を示すブロック図である。
【図6】従来の定在波レーダで、発振周波数を掃引する電圧波形の一例を示す図である。
【図7】ターゲットとの距離dに対する定在波の周波数との関係を示す図である。
【符号の説明】
【0027】
11 VCO
15 アンテナ
16 第1の検波器
19 CPU(信号処理手段)
20 第2の検波器
21 位相識別手段
22 周波数シンセサイザ
M ターゲット
【特許請求の範囲】
【請求項1】
(a)定められた帯域内で発振周波数を掃引可能な電圧制御発振器と、(b)該電圧制御発振器に一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期とする同調電圧を印加して周波数を掃引するように制御する周波数シンセサイザと、(c)前記電圧制御発振器から出力する電磁波を放射し、かつ、放射された進行波の一部がターゲットから反射する反射波を受信するアンテナと、(d)前記アンテナにより受信した反射波と、前記進行波と反射波とが干渉して発生する定在波を検波する第1の検波器と、(e)前記第1の検波器と位相を90度またはその奇数倍ずらして設けられ前記反射波を検波する第2の検波器と、(f)前記一定電圧で前記電圧制御発振器から発生する電磁波の反射波を検波し、前記第1の検波器および第2の検波器の出力から得られるドップラー信号により、前記ターゲットが近づく信号か遠ざかる信号かを識別する位相識別手段と、(g)該位相識別手段の出力に基づき、ドップラーシフトの量が0またはプラスになるような勾配の前記アップ波形またはダウン波形の掃引電圧を前記電圧制御発振器に印加するように前記周波数シンセサイザを制御すると共に、前記ドップラー信号から算出したドップラーシフトによる距離のズレを、前記第1の検波器により得られる定在波信号より求められる距離から減算することにより前記ターゲットまでの距離を算出する信号処理手段とを有することを特徴とする定在波レーダ。
【請求項2】
発振器から出力する電磁波を周波数掃引してアンテナから放射し、該放射された進行波がターゲットに反射して、ターゲットとの間に形成される定在波を検波し、該定在波信号から前記ターゲットまでの距離を計測する距離測定方法において、前記周波数掃引する前記発振器の制御電圧を、一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期として印加し、前記一定電圧で前記電圧制御発振器から発生する電磁波の反射波によりドップラー信号を検出し、該ドップラー信号が前記ターゲットがアンテナに近づく信号か遠ざかる信号かにより、ドップラーシフト量が0またはプラスになるように、前記アップ波形またはダウン波形のいずれかの前記制御電圧を前記発振器に印加すると共に、前記ドップラー信号からドップラーシフトによる距離のズレを求め、前記定在波信号により得られるターゲットとの距離から前記ドップラーシフトによる距離のズレを除去することにより、前記ターゲットとの間の距離を求めることを特徴とする距離測定方法。
【請求項1】
(a)定められた帯域内で発振周波数を掃引可能な電圧制御発振器と、(b)該電圧制御発振器に一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期とする同調電圧を印加して周波数を掃引するように制御する周波数シンセサイザと、(c)前記電圧制御発振器から出力する電磁波を放射し、かつ、放射された進行波の一部がターゲットから反射する反射波を受信するアンテナと、(d)前記アンテナにより受信した反射波と、前記進行波と反射波とが干渉して発生する定在波を検波する第1の検波器と、(e)前記第1の検波器と位相を90度またはその奇数倍ずらして設けられ前記反射波を検波する第2の検波器と、(f)前記一定電圧で前記電圧制御発振器から発生する電磁波の反射波を検波し、前記第1の検波器および第2の検波器の出力から得られるドップラー信号により、前記ターゲットが近づく信号か遠ざかる信号かを識別する位相識別手段と、(g)該位相識別手段の出力に基づき、ドップラーシフトの量が0またはプラスになるような勾配の前記アップ波形またはダウン波形の掃引電圧を前記電圧制御発振器に印加するように前記周波数シンセサイザを制御すると共に、前記ドップラー信号から算出したドップラーシフトによる距離のズレを、前記第1の検波器により得られる定在波信号より求められる距離から減算することにより前記ターゲットまでの距離を算出する信号処理手段とを有することを特徴とする定在波レーダ。
【請求項2】
発振器から出力する電磁波を周波数掃引してアンテナから放射し、該放射された進行波がターゲットに反射して、ターゲットとの間に形成される定在波を検波し、該定在波信号から前記ターゲットまでの距離を計測する距離測定方法において、前記周波数掃引する前記発振器の制御電圧を、一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期として印加し、前記一定電圧で前記電圧制御発振器から発生する電磁波の反射波によりドップラー信号を検出し、該ドップラー信号が前記ターゲットがアンテナに近づく信号か遠ざかる信号かにより、ドップラーシフト量が0またはプラスになるように、前記アップ波形またはダウン波形のいずれかの前記制御電圧を前記発振器に印加すると共に、前記ドップラー信号からドップラーシフトによる距離のズレを求め、前記定在波信号により得られるターゲットとの距離から前記ドップラーシフトによる距離のズレを除去することにより、前記ターゲットとの間の距離を求めることを特徴とする距離測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−147473(P2007−147473A)
【公開日】平成19年6月14日(2007.6.14)
【国際特許分類】
【出願番号】特願2005−343140(P2005−343140)
【出願日】平成17年11月29日(2005.11.29)
【出願人】(000191238)新日本無線株式会社 (569)
【Fターム(参考)】
【公開日】平成19年6月14日(2007.6.14)
【国際特許分類】
【出願日】平成17年11月29日(2005.11.29)
【出願人】(000191238)新日本無線株式会社 (569)
【Fターム(参考)】
[ Back to top ]