
定在波レーダー内蔵型LED照明器具
【課題】トイレ、風呂場、廊下等に設置してある既存の照明器具の代わりに設置するだけで、人体の位置、呼吸数及び心拍数等を検出することができ、人体の容体の急変を迅速に検知することができる定在波レーダー内蔵型LED照明器具を提供する。
【解決手段】ケース内に、円周上に配置されたLED6と、定在波レーダーモジュール8と、演算部31が設けられた基板7と、LED制御ユニット10とが配置されている。LEDから照明光が外部に向けて出射されると共に、定在波レーダーモジュール8からマイクロ波が送信され、反射波を検出する。演算部31は、送信波及び反射波を合成して、定在波を検出し、この定在波から、被反射体までの距離及び微小変位(脈拍、呼吸)を検出する。
【解決手段】ケース内に、円周上に配置されたLED6と、定在波レーダーモジュール8と、演算部31が設けられた基板7と、LED制御ユニット10とが配置されている。LEDから照明光が外部に向けて出射されると共に、定在波レーダーモジュール8からマイクロ波が送信され、反射波を検出する。演算部31は、送信波及び反射波を合成して、定在波を検出し、この定在波から、被反射体までの距離及び微小変位(脈拍、呼吸)を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、LED(発光ダイオード素子)照明器具に関し、特に、定在波レーダーを使用して、照明器具の下方に位置する人体の危険状態を検知する機能を付加した定在波レーダー内蔵型LED照明器具に関する。
【背景技術】
【0002】
従来の人体を検知する照明器具は、人体を赤外線センサ、超音波センサ又はドップラーセンサにより検知して、照明のオン及びオフを制御するものであり(特許文献4,5)、人体の危険状態を検知できるものではなかった。
【0003】
特許文献1には、間取りが種々異なる監視対象の住居でも容易に設置することができ、居住者の行動推移及び生活空間毎の動向を容易に把握できる居住者監視システムとして、電波を放出し、その反射波を受信する電波センサと、この電波センサが受信する信号の振幅及び位相を検出して検出信号を得る検出部と、この検出信号から居住者又は動物の現在位置、動き、呼吸数及び心拍数を測定して居住者の又は動物の存在の有無を判定する信号処理部とを有するシステムが開示されている。
【0004】
また、特許文献2には、ドップラー効果により監視対象の動きを検出する電波センサを備え、動き信号を、呼吸数の周波数帯域を通過周波数帯域とする呼吸数フィルタを通し、心拍数の周波数帯域を通過周波数帯域とする心拍数フィルタを通して、夫々の最大振幅から、呼吸数及び心拍数を算出する非接触式心肺機能監視装置が開示されている。
【0005】
更に、特許文献3には、住居内で、電波を送受信し、電波センサが受信した反射波に応じた信号から、居住者の呼吸に対応する周波数帯の呼吸信号と、この呼吸信号よりも高い周波数帯の動き信号とを抽出し、呼吸信号を検出しつつ、動き信号に基づいて、居住者に一定時間以上動きがない場合に、居住者が異常状態にあると判定する監視システムが開示されている(請求項1)。また、この電波センサは、ドップラーセンサである(請求項3)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−66877号公報
【特許文献2】特許第3057438号公報
【特許文献3】特開2006−285795号公報
【特許文献4】特開2011−34938号公報
【特許文献5】特開2003−132704号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載の従来技術においては、部屋毎に設置された(段落0007)複数の電波センサにより検出した位相又は振幅から、人の呼吸数及び心拍数を検出するが、居住者の位置情報については、位相又は振幅が変動しているセンサが監視している領域に居住者が位置し、位相又は振幅が変動していないセンサが監視している領域には居住者が不在として、居住者の位置を判定しているにすぎない(段落0013)。このように、特許文献1においては、居住者の位置については、どの部屋にいるかという程度の位置情報しか検出できない。また、居住者の異常については、居住者が通常長時間留まらない場所に長時間いるような場合を、異常と判断している(段落0026)。従って、特許文献1においては、人の異常を高精度にかつ迅速に検出することができない。
【0008】
また、特許文献1のように、放射された電波の反射波の受信信号の振幅及び位相を検出する場合、その振幅及び位相を検出できる距離は数m以上離隔していることが必要であり、この数m以上離隔した位置からの反射波しか、振幅及び位相を検出することができない。検出器がドップラーレーダーであれば、近距離での心拍及び呼吸の検出が可能であるが、ドップラーレーダーは反射波の周波数の変化を検出するものであるので、特許文献1のように、信号の振幅及び位相の変化だけでは、心拍及び呼吸を検出することができない。
【0009】
更に、特許文献2及び3は、ドップラー効果により検出された信号から、最大振幅の周波数を呼吸数及び心拍数として、算出するものであるが、ドップラー方式であるため,対象物の速度は検出できるが、距離を検出することができない。よって、特許文献2及び3は、人体の位置を検出することができない。
【0010】
本発明はかかる問題点に鑑みてなされたものであって、トイレ、風呂場、廊下等に設置してある既存の照明器具の代わりに設置するだけで、人体の位置、呼吸数及び心拍数等を検出することができ、人体の容体の急変を迅速に検知することができる定在波レーダー内蔵型LED照明器具を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明に係る定在波レーダー内蔵型LED照明器具は、
少なくとも一部に透光性のカバーを備えたケースと、
このケース内に格納され、前記カバーを介して照明光を外部に照射する発光体としてのLED光源と、
前記ケース内に格納され、前記カバーを介して周波数掃引された電波を外部に送信し、λを送信波の波長として、外部の被反射体から受信した反射波を送信波長に基づく一定距離λ/8だけ離隔した2点にて検出し、送信波及び受信波から合成される定在波を検知する定在波検知部と、
前記定在波検知部が検知した合成波の強度の周波数分布から、その直流成分を除去し、フーリエ変換して、距離スペクトルを求めて、前記被反射体までの距離を演算する演算部と、
得られた被反射体までの距離を、測定空間が無人の場合に得られた距離成分と比較し、前記測定空間内に進入してきた測定対象者との間の距離成分を抽出する信号処理部と、
測定対象者との間の距離成分から、前記測定対象者の身体状態並びに呼吸数及び脈拍を含む生理状態を判定する判定部と、
を有することを特徴とする。
【0012】
本発明の定在波レーダー内蔵型LED照明器具においては、例えば、
前記ケースの下部に、電球のソケット又はシーリングに装着可能なコネクタからなる給電部が設けられており、この給電部を介して、前記LED光源及び前記定在波検知部に給電されることを特徴とする。
【0013】
また、本発明の定在波レーダー内蔵型LED照明器具においては、例えば、
前記演算部、前記信号処理部及び前記判定部は、前記定在波検知部と共に、モジュールとして、前記ケース内に格納されていることを特徴とする。
【0014】
更に、本発明の定在波レーダー内蔵型LED照明器具においては、例えば、
前記判定部が、前記測定対象者との間の距離、又は前記測定対象者の呼吸数若しくは脈拍が、予め設定されている危険領域であると判定したとき、警報信号を外部の警報信号受信部に送信して、警報を発することを特徴とする。
【0015】
そして、本発明の定在波レーダー内蔵型LED照明器具の利用方法は、
上記定在波レーダー内蔵型LED照明器具を居宅又はビルの天井に設置して、居宅又はビル内の人体の異常を判定することを特徴とする。
【0016】
又は、本発明の定在波レーダー内蔵型LED照明器具の利用方法は、
上記定在波レーダー内蔵型LED照明器具を乗り物の天井に設置して、乗り物内の人体の混み具合を判定することを特徴とする。
【0017】
又は、本発明の定在波レーダー内蔵型LED照明器具の利用方法は、
上記定在波レーダー内蔵型LED照明器具を道路の照明のために設置して、道路にあふれた水の水位及び道路に位置する人体の混み具合を判定することを特徴とする。
【発明の効果】
【0018】
本発明によれば、定在波の分析により、微小距離から遠方まで、高精度で、測定対象者までの距離を測定できると共に、測定対象者の呼吸数及び脈拍等の微小変位も測定することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施形態に係るLED照明器具の外観図である。
【図2】同じくその構造を示す縦断面図である。
【図3】同じくそのレーダー制御モジュール基板7、定在波レーダーモジュール8、及びLED制御ユニット10のブロック図である。
【図4】定在波レーダーの基本構成を示す図である。
【図5】送信波の波長を示す図である。
【図6】合成波のパワーを示す図である。
【図7】フーリエ変換後の図である。
【図8】合成波のパワーを示す図である。
【図9】複数個のターゲットに対する定在波レーダーの基本構成を示す図である。
【図10】目的の成分pa(fd、0)を示すスペクトル図である。
【図11】ターゲットが2個の場合の距離スペクトルを示す図である。
【図12】合成波のスペクトルの真数部分と虚数部分を示す図である。
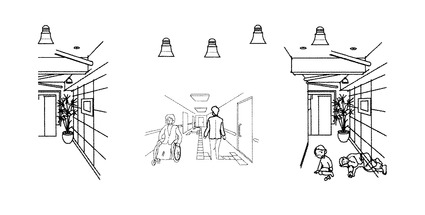
【図13】本発明の実施形態のLED照明器具をトイレに設置した場合の利用方法を示す図である。
【図14】本発明の実施形態のLED照明器具を風呂場に設置した場合の利用方法を示す図である。
【図15】本発明の実施形態のLED照明器具を廊下に設置した場合の利用方法を示す図である。
【図16】代表的な異常呼吸パターンを示す図である。
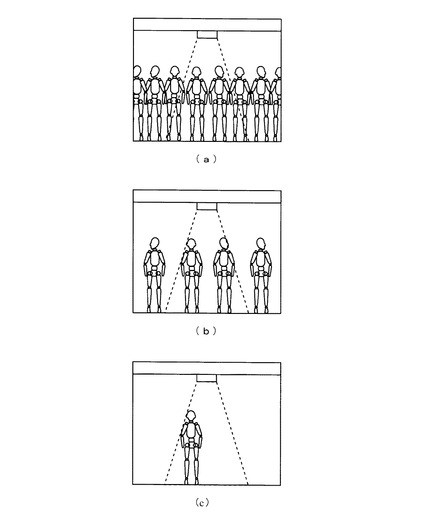
【図17】本発明の実施形態のLED照明器具を電車内の監視に利用した状態を示す図である。
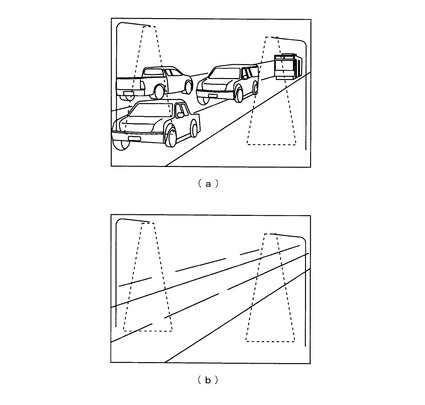
【図18】本発明の実施形態のLED照明器具を道路の状況の監視に利用した状態を示す図である。
【図19】直下型の照明器具を示す図である。
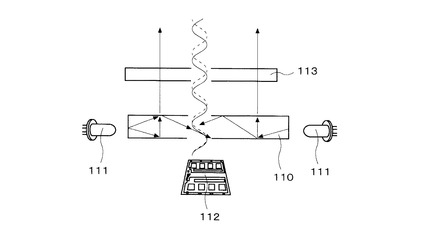
【図20】導光方式の照明器具を示す図である。
【発明を実施するための形態】
【0020】
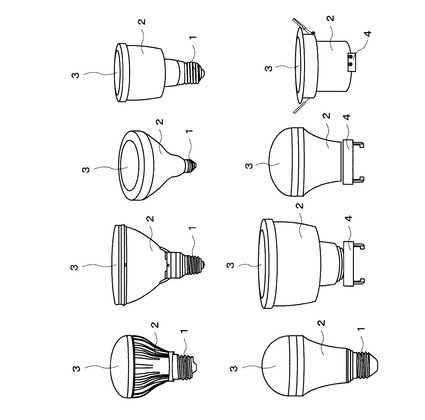
以下、本発明の実施形態について、貼付の図面を参照して具体的に説明する。図1は本発明の実施形態に係る定在波レーダー内蔵型LED照明器具の外観図である。LED照明器具のケースは、既存のソケットに装着可能な口金1と、ABS等の樹脂素材又はアルミニウム材等で形成され、放熱機能をもつケース本体2と、透明若しくは半透明のABS若しくはポリカーボネート等の透光性樹脂素材又はガラス等からなる透光性カバー3とから構成されている。透光性カバー3は、光を拡散させ、又は光ビームを絞り込むレンズ形状を有する。なお、照明器具として、口金1の代わりに、天井のシーリングに引っかけて装着する引掛けシーリング4を備えたものもある。このように、LED照明器具としては、多数のものが存在するが、本発明は、いずれのLED照明器具にも適用することができる。
【0021】
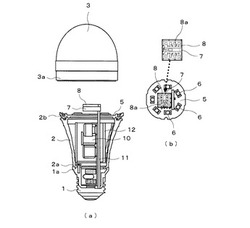
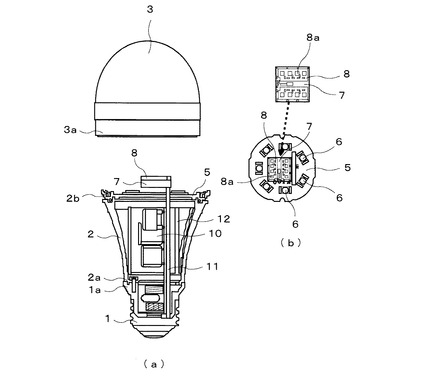
図2は、本発明の実施形態に係るLED照明器具の構造を示す図である。LED照明器具は、口金1と、ケース本体2と、カバー3とから構成されたケースの内部に、表面実装型LED6と、定在波レーダーモジュール8と、LED制御ユニット10とが格納されている。口金1の下半部はソケットにねじ込まれる部分であり、導電性の材料で形成されており、この口金1の上半部は、絶縁性の支持体となっている。そして、口金1の絶縁性支持体の上端部には、その内周縁部に周方向に沿って延びるねじ部1aが設けられており、ケース本体2の下端部にも、その外周縁部に周方向に沿って延びるねじ部2aが設けられていて、ねじ部1aをねじ部2aに螺合させることにより、口金1とケース本体2とが連結されるようになっている。また、ケース本体2の上端部にねじ部2bが形成され、カバー3の下端部にねじ部3aが形成されていて、ねじ部3aをねじ部2bに螺合させることにより、カバー3とケース本体2とが連結されるようになっている。
【0022】
ケース本体2内には、絶縁性の基板固定用ガイドフレーム12が設置されており、このガイドフレーム12に、LED制御ユニット10の基板11が固定されている。この基板11はその面を上下方向にして、即ち、その面を照明器具の中心軸に平行にして、ガイドフレーム12に固定されている。LED制御ユニット10は、この基板11上に搭載されており、ケース本体2及び口金1に囲まれた空間内に配置されている。この基板11には、口金1内で、外部から給電された100Vの交流電源が供給され、この電源は、基板11上に搭載された変換器でAC−DC変換された後、LED制御ユニット10に供給される。
【0023】
ケース本体2の上端部には、放熱性が優れたアルミニウム基板5がその面を水平にして配置されている。このアルミニウム基板5はケース本体2の上端部の縁部に支持されているが、基板11はこのアルミニウム基板5を挿通して、カバー3内に進出している。そして、この基板11の上端部に、レーダー制御モジュール基板7がその面を水平にして支持されており、このレーダー制御モジュール基板7の上に定在波レーダーモジュール8が搭載されている。アルミニウム基板5には、複数個(図示例は7個)のLED6が、照明器具の中心軸の周りに等配の位置に、即ち、円周上の等間隔の位置に、配置されている。アルミニウム基板5の電源線には、基板11の配線が接続されていて、基板11上の配線を介して、LED制御ユニット10からアルミニウム基板5上に搭載されたLED6に給電され、LED6が発光するようになっている。また、レーダー制御モジュール基板7上に搭載された定在波レーダーモジュール8には、基板11上の配線を介して、給電され、定在波レーダーモジュール8はマイクロ波等の電波を送受信し、レーダー制御モジュール基板7は、検出信号を、無線で外部の中継機器に送信する。この定在波レーダーモジュール8の上面には、アンテナ8aが設置されており、電波はこのアンテナ8aを介して送受信される。なお、この定在波レーダーモジュール8はレーダー制御モジュール基板7に対して、傾斜可能になっており、この定在波レーダーモジュール8を傾斜させることにより、アンテナ8aの指向方向を調節できるようになっている。
【0024】
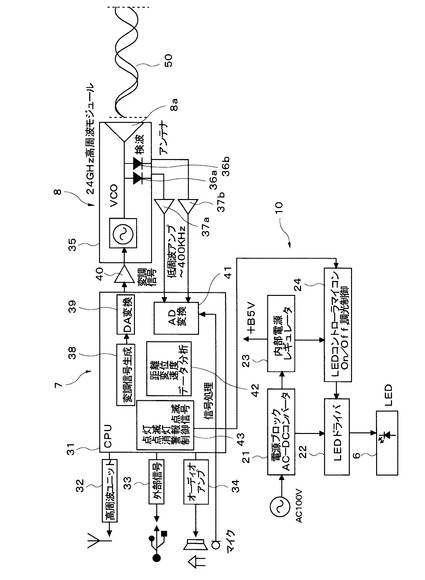
図3はレーダー制御モジュール基板7、定在波レーダーモジュール8、及びLED制御ユニット10のブロック図である。外部電源から、LED制御ユニット10の電源ブロック21に100Vの交流電源が入力され、電源ブロック21のAC−DCコンバータにより直流電源に変換されて、内部電源レギュレータ23に入力され、直流の5V電源が定在波レーダーモジュール8及びLEDコントローラマイコン24に供給される。また、AC−DCコンバータの出力は、LEDドライバ22にも供給されてLED6の駆動に使用される。LEDコントローラマイコン24は定在波レーダーモジュール8からの制御信号を受けて、LEDドライバ22にLEDのオン/オフの制御信号及び調光の制御信号を出力し、LEDドライバ22はこの制御信号に基づき、LED6を駆動する。
【0025】
レーダー制御モジュール基板7には、演算部31が設けられており、演算部31は、変調信号生成部38にてFM変調された周波数制御電圧を生成し、この周波数制御電圧をDA変換部39にてアナログ信号に変換された周波数制御信号がオペアンプ40を介して増幅された後、24GHz高周波モジュール35のVCOの制御入力に入力される。この周波数制御信号により、VCOは発信電波の周波数をスイープさせる。
【0026】
定在波レーダーモジュール8には、24GHz高周波送受信部35が設けられており、この24GHz高周波送受信部35は、24GHz帯VCO(電圧制御発振器)と平面アンテナ8aとが一体化されたモジュールである。そして、この送受信部35は、VCOにより平面アンテナ8aからマイクロ波が発信され、被反射体からの反射波がアンテナ8aに検出される。送受信部35には2個の検波器36a、36bが内蔵されており、検波器36a、36bは送信波及び受信波を検波する。
【0027】
アンテナ8aから電波を送信すると、反射物体がある場合は、アンテナ8aに反射波が戻ってきて、周波数が同じで進行方向が異なる波が重なり、定在波が発生する。VCOとアンテナ8aとを接続する線路上及びアンテナ給電部には、送信信号(進行波)と受信信号(反射波)が混在し、それらの合成で定在波が発生する。この場合に、VCOに供給するスイープ電圧を、少なくとも発信電波が被反射体に反射して戻ってくるまでの時間は一定に保持する必要があるため、前記スイープ電圧は、ステップ状に変化させる必要がある。そして、VCOを制御して周波数を順次切り替えることにより、複数の周波数に対する混合波の信号レベルが検波器36a、36bにより検出される。検波器36a、36bでは、送信波の電力と、反射波の電力と、定在波によって生じた成分とが検出される。得られた検波信号は、オペアンプ37a、37bで400kHz以下の必要な帯域が増幅され、演算部31内のAD変換部41によりデジタル信号に変換された後、信号処理部42に入力される。信号処理部42においては、入力される信号は周期関数で、その周期は被反射体からの距離に逆比例しているので、これをフーリエ変換することにより、周期の逆数である周波数を求めることによって、この周波数から被反射体までの距離を求めることができる。また、得られた波形の位相を基に、被反射体の微小変位情報を検出することができる。例えば、24GHzの場合は、微小変位は光速を4πfで除算した値となり、約±3.125mmの範囲の変位を検出することができる。このように、検波器36a、36bから検出された信号を信号処理することにより、被反射体からの距離、被反射体の速度及び変位を演算し、その経時変化を計測することにより、被反射体の動きを検出することができる。演算部42ではこの被反射体の動きを分析し、分析結果を警報部43に出力し、警報部43はLEDの点灯、点滅、消灯、警報点滅等の制御信号をLEDコントローラマイコン24に出力する。
【0028】
また、演算部31は、得られた被反射体の状態を、高周波ユニット32を介して無線で、また出力端子33を介して有線で、外部に送信する。また、演算部31は、オーディオアンプ34を介して、警報音を発する。この無線送信、有線送信又は警報音は、いずれか1つの手段を採用すればよい。
【0029】
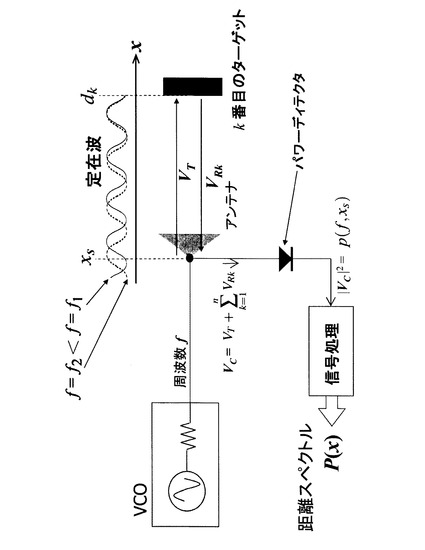
次に、本発明の実施形態の動作について、信号処理部42の構成と共に説明する。定在波は、図4に示すように,信号源であるVCOから生成した送信波VTと、各ターゲットからの反射波VR1,VR2,VR3、・・・VRnとの干渉によって生じる。定在波レーダーは、この定在波を利用することによって、ターゲットの有無を検知し、各ターゲットまでの距離d1,d2,d3・・・dnを測定する。
【0030】
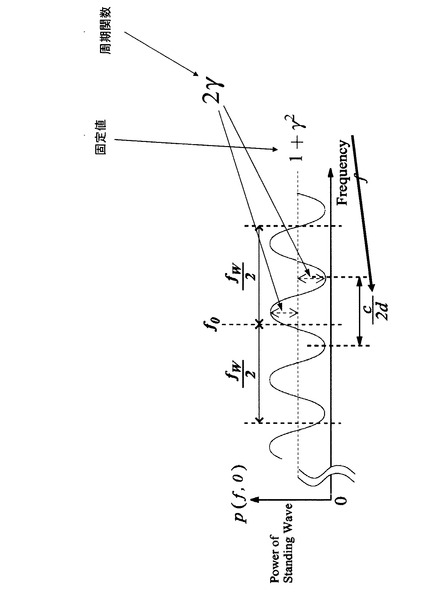
送信波(進行波)は、信号源の振幅をA、周波数をf、光速をc(3×108m/s)とすると、各数式1で表される。但し、周波数fは、図5に示すように、f0とfdで表される。
【0031】
【数1】

【0032】
k番目のターゲットの距離をdk、x軸上の任意の点における送信波に対する反射波の大きさの比をγk(反射係数の大きさ)、位相差をφk(反射係数の位相)とすれば、そのターゲットからの反射波は下記数式2にて表すことができる。
【0033】
【数2】
【0034】
アンテナから検出される検波出力は、合成波になるので、振幅Vcは下記数式3で表され、パワーは振幅の2乗であるので、合成波のパワーは、下記数式4で表される。
【0035】
【数3】
【0036】
【数4】
【0037】
送信波の大きさは、反射波の大きさより桁違いに大きいので、γkは1より極めて小さい。そこで、数式4に数式1及び数式2を代入して近似値をとると、下記数式5が得られる。
【0038】
【数5】
【0039】
この数式5において、{}内の第1項は、送信波のパワーを示し、第2項は、反射波のパワーを示し、第3項は、定在波によるパワーの変化分を示す。従来のレーダーは、第2項の反射波を受信して、信号処理を行うが、本発明においては、第3項の信号を信号処理する。このため、第1項目と第2項目を削除するため、合成波パワーp(fd、xs)をfdで微分して、この第1項目及び第2項目を除去する。
【0040】
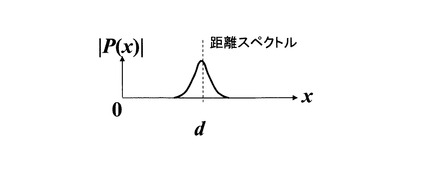
ここで、ターゲット(被反射体)の数が1であるとすると、n=1を数式5に代入して、下記数式6が得られる。この数式6をグラフ化すると、図6のようになる。即ち、合成波のパワーは、固定値1+γ2と、周期関数との和となる。この図6において、周期関数の周波数(周期の逆数)はc/2dとなり、距離dの成分が入る。このため、周期から周波数を求めれば、距離dが求まることになる。数式6から、直流成分1+γ2を除去して、フーリエ変換すると、図7に示すように、距離スペクトルP(x)が求まる。
【0041】
【数6】
【0042】
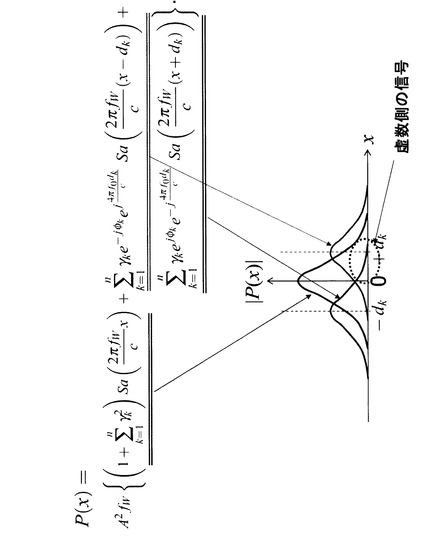
先ず、下記数式7に示すフーリエ変換公式に対し、変数の置き換えをし、更に、観測位置を原点として、フーリエ変換すると、下記数式8に示す距離スペクトルが得られる。但し、Sa(z)=sin(z)/zとする。なお、数式8では、直流分がカットされていない。周期のある関数をフーリエ展開すると、その関数に含まれる直流成分と、振動成分(sin、cos)に分解されてしまう。距離スペクトルは、その公式上、下記数式8のように表示される。
【0043】
【数7】
【0044】
【数8】
【0045】
なお、数式8のA2fw(1+Σγk2)Sa(2πfw/c)x)は、直流成分であるが、この直流成分は、実際の回路において、コンデンサにより除去される。
【0046】
この数式8の第3式で表されるパワーP(x)をグラフ図でみると、図8に示すようになる。そして、数式8の{}内の第1項目の直流分を除去し、第3項目をcos成分を複素正弦波(解析信号)に変換して除去し、定在波成分である第2項目の成分を抽出することができる。しかし、図8に破線にて示すように、数式8の{}内の第2項目の成分には、虚数側の信号が漏れ込んでしまう。つまり、この部分の定在波成分には、虚数側の信号が漏れ込んだ値になってしまう。
【0047】
このような問題点を解消するために、本発明においては、図9に示すように、送信波とその反射波を合成した信号を検出する際に、送信波の波長をλとして、λ/8だけ離隔した2点にて、信号レベルを検出する。つまり、レーダーの進行方向をx軸にとった場合に、被反射体であるn個(nは自然数、図示は2個のみ)のターゲットからの反射波をアンテナが受信し、これを送信波と共に、x軸方向にλ/8だけ離隔した2個のパワーディテクタで検出し、これを信号処理する。このとき、この2個のディテクタが検出したパワーレベルをp(fd,x1)、p(fd,x2)とすると、x1=0の位置に置かれたディテクタの出力は、検出パワーを示す数式5に、x1=xs=0を代入して、下記数式9に示すp(fd、0)として求まり、x1=−λ/8の位置に置かれたディテクタの出力は、検出パワーを示す数式5に、x2=xs=−λ/8を代入して、下記数式9に示すp(fd、−λ/8)として求まる。この数式9に示すように、λ/8だけ離隔した2点で定在波を検出することにより、各位置(0,−λ/8)に置かれたディテクタの出力の定在波成分に、cosとsinの直交成分が得られ、これにより、虚像信号を消去することができ、虚像側から漏れ込む信号の影響を解消することができる。即ち、cosとsinの直交成分(X軸成分とY軸成分)から合成されるベクトルが求める解析信号である。通常、虚軸側の信号は測定できないのであるが、−λ/8の位置に、虚軸側の信号が計測できることになり、ベクトル合成信号を形成できる。このベクトルの回転速度が周波数になるので、本実施形態では、この周波数と位相を解析することになる。
【0048】
【数9】
【0049】
この数式9におけるxs=0の位置のディテクタの出力のうちの定在波成分をa、xs=−λ/8の位置のディテクタの出力のうちの定在波成分をbとすると、a、bは下記数式10にて表される。そして、数式8の第3式を下記数式11に基づいて置き換えをすると、下記数式12及び数式13が得られる。即ち、数式10が求めるX軸、Y軸(実信号、虚軸信号)を実信号に変換された形に置き換えることが可能になる。数式13は、まさに、時間方向の信号と、回転軸での信号を表現しているが、結局、この数式13により、回転する解析信号を計算できることがわかる。
【0050】
【数10】
【0051】
【数11】
【0052】
【数12】
【0053】
【数13】
【0054】
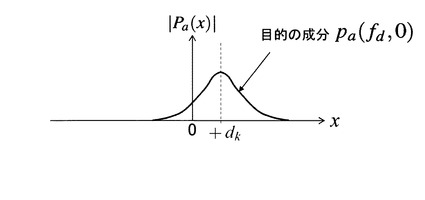
数式12の右辺のPDCは直流成分であり、m(fd)cos(θ(fd)−4π(f0+fd)/c・xs)は周期的に変化する定在波成分である。この定在波成分は、前述のごとく、xs=0の位置の成分aと、xs=−λ/8の位置の成分bとの合成成分a+jbは、sinとcosとの直交成分となり、aとbとから解析信号を合成することにより、不要の信号(図8に示す虚数側から漏れ込んだ信号)による影響が除去される。よって、この値(数式13の信号)を解析することにより、図10に示す目的の成分pa(fd,0)が得られる。
【0055】
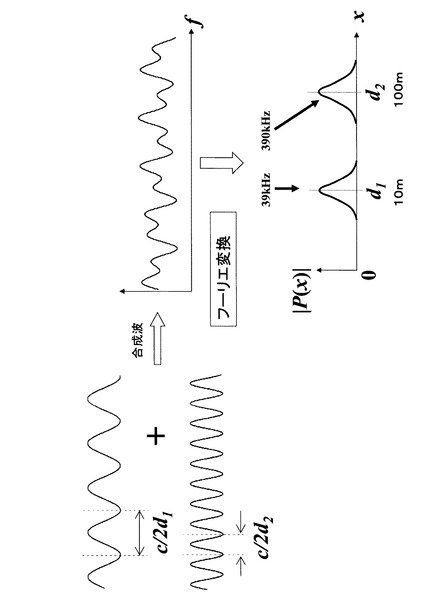
なお、ターゲットが2個の場合の距離スペクトルは、図11に示すように、xs=0のパワーp(fd、0)とxs=−λ/8のパワーp(fd,−λ/8)との合成波から直流分を除去して、フーリエ変換することにより、距離に対応する周波数が得られ、距離d1,d2が求まる。
【0056】
図12は合成波の真数のスペクトルと、虚数のスペクトルを示す図である。電波の速度cは、約30万km/秒である。発信波の周波数のスイープを、75MHz幅(fw)で行った場合、この75MHzの波長は、c/fw=4mである。しかし、波形を標本化するためのスイープは、往復で4mのため、行きはその半分の2mとなる。この2mを1周期と呼ぶ。そこで、スイープ幅75MHzで20mを計測した場合、10周期を計測することになる。スイープ時間が256μsであるとすると、観測する波形の周波数は、10/256μs=39kHzとなる。同様に、200mを計測した場合、100周期であるので、100/256μs=390kHzとなる。そして、図12に示す検出されたスペクトルの周波数のレベルは反射の強さを示し、周波数は距離に置き換えられる。よって、図11に示すように、フーリエ変換して39kHzのところにピークが現れると、それは、距離d1=10mの位置からの反射波であることがわかり、390kHzのところにピークが現れると、それは、距離d2=100mの位置からの反射波であることがわかる。このようにして、ディテクタの合成波の検出パワーpa(fd)を微分して直流成分を除去し、フーリエ変換すると、被反射体までの距離を求めることができる。
【0057】
スイープ幅が200MHzの場合、1周期が0.75mになるので、10mの計測は10/0.75=13.3周期を観測することになり、スイープ時間が256μsである場合は、13.3/256=51.9kHzとなる。つまり、スイープ幅が200MHzの場合は、51.9kHzにピークが現れた場合に、被反射体までの距離が10mと観測される。従って、スイープ幅を調整し、スイープ時間を調整することにより、検波出力の周波数を調整することができ、電波法の規制により帯域幅が制限されているので、一般的には、スイープ時間を可変とすることにより、被反射体までの距離を測定する。
【0058】
次に、微小変位計測について説明する。数式8において、位相に着目すると、k番目のターゲットに対する位相は、下記数式14により求まり、距離dkの変化分をdk、位相の変化分をΔφkとすると、下記数式15が得られる。
【0059】
【数14】
【0060】
【数15】
【0061】
この数式15から、距離dの微小変位が求まる。周波数が24GHzの場合は、±3.125mmの変位を検知することが可能となる。
【0062】
以上のように、信号処理部42において、被反射体からの反射波を送信波に合成した定在波の分析により、被反射体の距離及び微小変位を計測することができる。この計測結果を経時的に把握すれば、被反射体の距離、速度及び変位を計測することができ、結局、被反射体の動きを計測できる。従来のレーダーであると、1〜2m以下は距離の測定が困難であったのに対し、本発明により、0mに近い至近距離から、200mの遠距離迄、距離の測定が可能である。また、本発明の場合は、微小変位の検知が可能であり、相対変位分解能は0.01mmにも及ぶ。しかも、定在波レーダーの場合は、衣服を通して、衣服に包まれた人体にて直接反射するので、人体の異常を高精度で検知できる。
【0063】
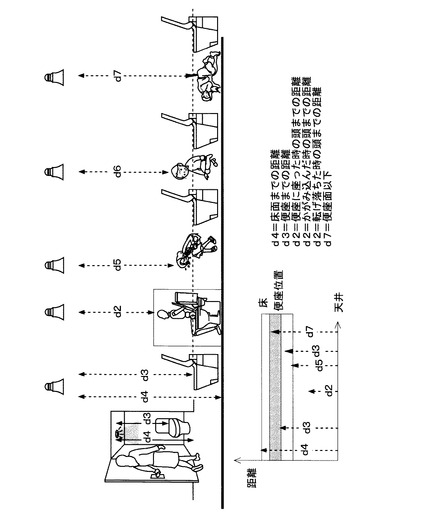
次に、本発明の実施形態に係る定在波レーダー内蔵型LED照明器具の利用例について説明する。図13はトイレの天井に本実施形態のLED照明器具を設置して、人体の異常を監視する場合、図14は風呂の天井に本実施形態のLED照明器具を設置して、人体の異常を監視する場合、図15は廊下の天井に本実施形態のLED照明器具を設置して、人体の異常を監視する場合を示す。
【0064】
先ず、図13に示すように、トイレ内で居住者が倒れた場合について説明する。最初に、LED照明器具の設置後、無人の場合の定在波を分析することにより、LED照明器具から、床面までの距離d4,便座までの距離d3を測定しておく。そして、トイレに居住者が入室した後、本実施形態のLED照明器具により、距離d2が計測される。この距離d2は居住者の頭までの距離である。これにより、d3,d4と異なる距離d2が計測されたことにより、居住者がトイレを利用中であることが判定される。その後、トイレの利用にとって適当な時間が経過した後、距離d2が計測されなくなった場合は、通常のトイレの利用が行われたと判定される。
【0065】
一方、利用者がトイレ内でうずくまっている場合及び座り込んでいる場合は、人体に異常が生じているのであるが、距離d5及び距離d6は、距離d3,d4とは異なると共に、便座に座っているときの頭までの距離d2より大きいので、異常事態が発生したことがわかる。この場合に、利用者に意識があれば、LED照明器具は利用者の動きも検出するので、置物ではなく、人体であることも判定され、人体に異常が生じたことが確実に把握される。これにより、警報部43が警報信号を出力し、トイレ利用者の異常事態を外部に知らせる。
【0066】
また、利用者がトイレの床に倒れており、意識がない場合、LED照明器具は頭の距離d2とは異なる距離d7を計測するが、人体の動きは計測できない。しかし、本発明においては、位相分析により微小変位を検出することができるので、倒れている人の呼吸数及び脈拍等の人体の微小な変位も検出できる。そこで、本発明により、置物ではなく、人体が倒れていることを判定できる。この場合に、定在波レーダーにより、衣服を透過して、その下の人体の表面の動きを直接計測できるので、より確実に人体の異常を検知することができる。また、演算部31に、呼吸数及び脈拍等の危険域を予め設定しておけば、呼吸等の検出により、人体か、置物かの区別だけでなく、人体の状況が重篤なものであるか、そうでないかも判定できる。
【0067】
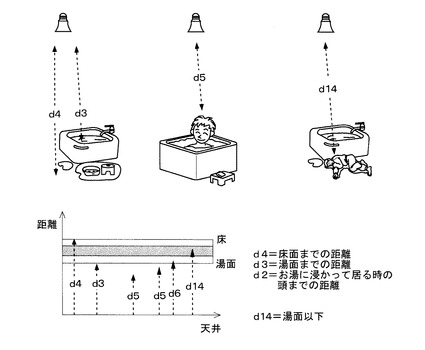
図14に示す風呂場の場合、図15に示す廊下の場合等も、同様に、無人の場合の計測結果を求めておき、その計測距離を異常検知から排除しておけば、居住者の異常を判定することができる。このとき、通常の人体行動のときの検出される距離の範囲を設定し、その範囲から外れる距離を計測した場合に、居住者に異常が生じたと判定することもできる。しかも、微小変位から呼吸及び脈拍を計測できるので、人体であるか否か、及び人体の場合にどの程度重篤であるかも判定することができる。なお、図16は呼吸数を計測している状態を示すチャートである。図16に示すように、本発明により、異常呼吸を検出できることがわかる。
【0068】
図17は電車の天井に本発明の実施形態のLED照明器具を取り付け、LEDで照明すると共に、定在波を分析して電車の混み具合を判定する方法を示す。このように、本発明の実施形態のLED照明器具を電車の天井に取り付ければ、電車内の人体の数が多いか、少ないか及びその人体の数のおおよその数を検出することができる。従って、電車内が満員であるか、通常の混み具合であるか、又はすいているかを、電車の集中運行管理センタで容易に把握することができる。
【0069】
図18は、市街地の電柱に本発明の実施形態のLED照明器具を取り付け、LEDで照明すると共に、洪水で道路に水があふれた場合の水位及びこの異常な道路にどの程度の人が存在するかを判定する方法を示す。このように、本発明の実施形態のLED照明器具を電柱に取り付ければ、洪水で水があふれた道路の水位の変化及びその場合に道路にどの程度の人数が繰り出しているか等を、防災センターで管理判定することができる。
【0070】
本発明は、上記実施形態に限らず、種々の変形が可能である。例えば、図19は本発明の照明器具の他の形態を示す。この図19に示す照明器具は、図2に示す電球型と異なり、看板等の平面発光の表示面の裏側にLEDを配置したものであり、直下型の照明器具である。基板100上の中心位置に、電波を外部に送信すると共に、外部からの反射波を受信する送受信部102が設置されており、この送受信部102の周辺に、複数個のLED101が、例えば、等間隔で配置されている。これらのLED101及び送受信部102は、透光性のカバー103に覆われており、LED101からの照明光はこのカバー103を介して外部に出射し、送受信部102はこのカバー103を介して送信波及び反射波を送受信する。このカバー103は、光を拡散させる作用も有し、カバー103からLED照明光が外部に向けて拡散し、滑らかな照明光として出射される。この照明器具においても、送受信部102から電波の送信及び反射波の受信が可能である。なお、この直下方式においては、照明カバーの背後にLEDを配置して、LED光が直接外部に出射するようにしている。よって、LED光の光量は強いものの、送受信部102は、金属製の放熱基板101の背後(下方)に設けることはできず、レーダー送受信部の設置位置に制約がある。なお、平面発光の表示面とは、必ずしも、看板に限らないことは勿論である。看板のように、文字又は図形が付されていない壁のようなものでも良い。
【0071】
図20に示す照明器具は、導光方式の照明器具であり、導光板110の背後に電波の送受信部112を配置し、導光板110の側面から、複数個の等間隔で並べられたLED111から発光した照明光を導光板110内に導入し、照明光を導光板110内で反射させて、導光板110からその表面に垂直の方向に出射させる。この導光板110の前方にも、透光性のカバー113が配置されており、このカバー113も光の拡散作用を有し、拡散により滑らかな照明光を出射させることができる。導光板110内に進入したLED光は、導光板110内でその下面及び上面に反射し、導光板110の上面から、光量がその面内でほぼ均一な面発光光となって、外部に出射される。この照明器具においても、送受信部112から電波の送信及び反射波の受信が可能である。この導光方式においては、照明光を面発光させることができると共に、レーダー送受信部112の位置は、導光板110の背後でも良く、その設置場所に制約がない。
【符号の説明】
【0072】
1:口金
2:ケース本体
3:カバー
5:アルミニウム基板
6:LED
7:定在波レーダーモジュール基板
8:定在波レーダーモジュール
10:LED制御ユニット
11:基板
12:フレーム
31:演算部
35:24GHz高周波モジュール
42:信号処理部
【技術分野】
【0001】
本発明は、LED(発光ダイオード素子)照明器具に関し、特に、定在波レーダーを使用して、照明器具の下方に位置する人体の危険状態を検知する機能を付加した定在波レーダー内蔵型LED照明器具に関する。
【背景技術】
【0002】
従来の人体を検知する照明器具は、人体を赤外線センサ、超音波センサ又はドップラーセンサにより検知して、照明のオン及びオフを制御するものであり(特許文献4,5)、人体の危険状態を検知できるものではなかった。
【0003】
特許文献1には、間取りが種々異なる監視対象の住居でも容易に設置することができ、居住者の行動推移及び生活空間毎の動向を容易に把握できる居住者監視システムとして、電波を放出し、その反射波を受信する電波センサと、この電波センサが受信する信号の振幅及び位相を検出して検出信号を得る検出部と、この検出信号から居住者又は動物の現在位置、動き、呼吸数及び心拍数を測定して居住者の又は動物の存在の有無を判定する信号処理部とを有するシステムが開示されている。
【0004】
また、特許文献2には、ドップラー効果により監視対象の動きを検出する電波センサを備え、動き信号を、呼吸数の周波数帯域を通過周波数帯域とする呼吸数フィルタを通し、心拍数の周波数帯域を通過周波数帯域とする心拍数フィルタを通して、夫々の最大振幅から、呼吸数及び心拍数を算出する非接触式心肺機能監視装置が開示されている。
【0005】
更に、特許文献3には、住居内で、電波を送受信し、電波センサが受信した反射波に応じた信号から、居住者の呼吸に対応する周波数帯の呼吸信号と、この呼吸信号よりも高い周波数帯の動き信号とを抽出し、呼吸信号を検出しつつ、動き信号に基づいて、居住者に一定時間以上動きがない場合に、居住者が異常状態にあると判定する監視システムが開示されている(請求項1)。また、この電波センサは、ドップラーセンサである(請求項3)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−66877号公報
【特許文献2】特許第3057438号公報
【特許文献3】特開2006−285795号公報
【特許文献4】特開2011−34938号公報
【特許文献5】特開2003−132704号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載の従来技術においては、部屋毎に設置された(段落0007)複数の電波センサにより検出した位相又は振幅から、人の呼吸数及び心拍数を検出するが、居住者の位置情報については、位相又は振幅が変動しているセンサが監視している領域に居住者が位置し、位相又は振幅が変動していないセンサが監視している領域には居住者が不在として、居住者の位置を判定しているにすぎない(段落0013)。このように、特許文献1においては、居住者の位置については、どの部屋にいるかという程度の位置情報しか検出できない。また、居住者の異常については、居住者が通常長時間留まらない場所に長時間いるような場合を、異常と判断している(段落0026)。従って、特許文献1においては、人の異常を高精度にかつ迅速に検出することができない。
【0008】
また、特許文献1のように、放射された電波の反射波の受信信号の振幅及び位相を検出する場合、その振幅及び位相を検出できる距離は数m以上離隔していることが必要であり、この数m以上離隔した位置からの反射波しか、振幅及び位相を検出することができない。検出器がドップラーレーダーであれば、近距離での心拍及び呼吸の検出が可能であるが、ドップラーレーダーは反射波の周波数の変化を検出するものであるので、特許文献1のように、信号の振幅及び位相の変化だけでは、心拍及び呼吸を検出することができない。
【0009】
更に、特許文献2及び3は、ドップラー効果により検出された信号から、最大振幅の周波数を呼吸数及び心拍数として、算出するものであるが、ドップラー方式であるため,対象物の速度は検出できるが、距離を検出することができない。よって、特許文献2及び3は、人体の位置を検出することができない。
【0010】
本発明はかかる問題点に鑑みてなされたものであって、トイレ、風呂場、廊下等に設置してある既存の照明器具の代わりに設置するだけで、人体の位置、呼吸数及び心拍数等を検出することができ、人体の容体の急変を迅速に検知することができる定在波レーダー内蔵型LED照明器具を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明に係る定在波レーダー内蔵型LED照明器具は、
少なくとも一部に透光性のカバーを備えたケースと、
このケース内に格納され、前記カバーを介して照明光を外部に照射する発光体としてのLED光源と、
前記ケース内に格納され、前記カバーを介して周波数掃引された電波を外部に送信し、λを送信波の波長として、外部の被反射体から受信した反射波を送信波長に基づく一定距離λ/8だけ離隔した2点にて検出し、送信波及び受信波から合成される定在波を検知する定在波検知部と、
前記定在波検知部が検知した合成波の強度の周波数分布から、その直流成分を除去し、フーリエ変換して、距離スペクトルを求めて、前記被反射体までの距離を演算する演算部と、
得られた被反射体までの距離を、測定空間が無人の場合に得られた距離成分と比較し、前記測定空間内に進入してきた測定対象者との間の距離成分を抽出する信号処理部と、
測定対象者との間の距離成分から、前記測定対象者の身体状態並びに呼吸数及び脈拍を含む生理状態を判定する判定部と、
を有することを特徴とする。
【0012】
本発明の定在波レーダー内蔵型LED照明器具においては、例えば、
前記ケースの下部に、電球のソケット又はシーリングに装着可能なコネクタからなる給電部が設けられており、この給電部を介して、前記LED光源及び前記定在波検知部に給電されることを特徴とする。
【0013】
また、本発明の定在波レーダー内蔵型LED照明器具においては、例えば、
前記演算部、前記信号処理部及び前記判定部は、前記定在波検知部と共に、モジュールとして、前記ケース内に格納されていることを特徴とする。
【0014】
更に、本発明の定在波レーダー内蔵型LED照明器具においては、例えば、
前記判定部が、前記測定対象者との間の距離、又は前記測定対象者の呼吸数若しくは脈拍が、予め設定されている危険領域であると判定したとき、警報信号を外部の警報信号受信部に送信して、警報を発することを特徴とする。
【0015】
そして、本発明の定在波レーダー内蔵型LED照明器具の利用方法は、
上記定在波レーダー内蔵型LED照明器具を居宅又はビルの天井に設置して、居宅又はビル内の人体の異常を判定することを特徴とする。
【0016】
又は、本発明の定在波レーダー内蔵型LED照明器具の利用方法は、
上記定在波レーダー内蔵型LED照明器具を乗り物の天井に設置して、乗り物内の人体の混み具合を判定することを特徴とする。
【0017】
又は、本発明の定在波レーダー内蔵型LED照明器具の利用方法は、
上記定在波レーダー内蔵型LED照明器具を道路の照明のために設置して、道路にあふれた水の水位及び道路に位置する人体の混み具合を判定することを特徴とする。
【発明の効果】
【0018】
本発明によれば、定在波の分析により、微小距離から遠方まで、高精度で、測定対象者までの距離を測定できると共に、測定対象者の呼吸数及び脈拍等の微小変位も測定することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施形態に係るLED照明器具の外観図である。
【図2】同じくその構造を示す縦断面図である。
【図3】同じくそのレーダー制御モジュール基板7、定在波レーダーモジュール8、及びLED制御ユニット10のブロック図である。
【図4】定在波レーダーの基本構成を示す図である。
【図5】送信波の波長を示す図である。
【図6】合成波のパワーを示す図である。
【図7】フーリエ変換後の図である。
【図8】合成波のパワーを示す図である。
【図9】複数個のターゲットに対する定在波レーダーの基本構成を示す図である。
【図10】目的の成分pa(fd、0)を示すスペクトル図である。
【図11】ターゲットが2個の場合の距離スペクトルを示す図である。
【図12】合成波のスペクトルの真数部分と虚数部分を示す図である。
【図13】本発明の実施形態のLED照明器具をトイレに設置した場合の利用方法を示す図である。
【図14】本発明の実施形態のLED照明器具を風呂場に設置した場合の利用方法を示す図である。
【図15】本発明の実施形態のLED照明器具を廊下に設置した場合の利用方法を示す図である。
【図16】代表的な異常呼吸パターンを示す図である。
【図17】本発明の実施形態のLED照明器具を電車内の監視に利用した状態を示す図である。
【図18】本発明の実施形態のLED照明器具を道路の状況の監視に利用した状態を示す図である。
【図19】直下型の照明器具を示す図である。
【図20】導光方式の照明器具を示す図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施形態について、貼付の図面を参照して具体的に説明する。図1は本発明の実施形態に係る定在波レーダー内蔵型LED照明器具の外観図である。LED照明器具のケースは、既存のソケットに装着可能な口金1と、ABS等の樹脂素材又はアルミニウム材等で形成され、放熱機能をもつケース本体2と、透明若しくは半透明のABS若しくはポリカーボネート等の透光性樹脂素材又はガラス等からなる透光性カバー3とから構成されている。透光性カバー3は、光を拡散させ、又は光ビームを絞り込むレンズ形状を有する。なお、照明器具として、口金1の代わりに、天井のシーリングに引っかけて装着する引掛けシーリング4を備えたものもある。このように、LED照明器具としては、多数のものが存在するが、本発明は、いずれのLED照明器具にも適用することができる。
【0021】
図2は、本発明の実施形態に係るLED照明器具の構造を示す図である。LED照明器具は、口金1と、ケース本体2と、カバー3とから構成されたケースの内部に、表面実装型LED6と、定在波レーダーモジュール8と、LED制御ユニット10とが格納されている。口金1の下半部はソケットにねじ込まれる部分であり、導電性の材料で形成されており、この口金1の上半部は、絶縁性の支持体となっている。そして、口金1の絶縁性支持体の上端部には、その内周縁部に周方向に沿って延びるねじ部1aが設けられており、ケース本体2の下端部にも、その外周縁部に周方向に沿って延びるねじ部2aが設けられていて、ねじ部1aをねじ部2aに螺合させることにより、口金1とケース本体2とが連結されるようになっている。また、ケース本体2の上端部にねじ部2bが形成され、カバー3の下端部にねじ部3aが形成されていて、ねじ部3aをねじ部2bに螺合させることにより、カバー3とケース本体2とが連結されるようになっている。
【0022】
ケース本体2内には、絶縁性の基板固定用ガイドフレーム12が設置されており、このガイドフレーム12に、LED制御ユニット10の基板11が固定されている。この基板11はその面を上下方向にして、即ち、その面を照明器具の中心軸に平行にして、ガイドフレーム12に固定されている。LED制御ユニット10は、この基板11上に搭載されており、ケース本体2及び口金1に囲まれた空間内に配置されている。この基板11には、口金1内で、外部から給電された100Vの交流電源が供給され、この電源は、基板11上に搭載された変換器でAC−DC変換された後、LED制御ユニット10に供給される。
【0023】
ケース本体2の上端部には、放熱性が優れたアルミニウム基板5がその面を水平にして配置されている。このアルミニウム基板5はケース本体2の上端部の縁部に支持されているが、基板11はこのアルミニウム基板5を挿通して、カバー3内に進出している。そして、この基板11の上端部に、レーダー制御モジュール基板7がその面を水平にして支持されており、このレーダー制御モジュール基板7の上に定在波レーダーモジュール8が搭載されている。アルミニウム基板5には、複数個(図示例は7個)のLED6が、照明器具の中心軸の周りに等配の位置に、即ち、円周上の等間隔の位置に、配置されている。アルミニウム基板5の電源線には、基板11の配線が接続されていて、基板11上の配線を介して、LED制御ユニット10からアルミニウム基板5上に搭載されたLED6に給電され、LED6が発光するようになっている。また、レーダー制御モジュール基板7上に搭載された定在波レーダーモジュール8には、基板11上の配線を介して、給電され、定在波レーダーモジュール8はマイクロ波等の電波を送受信し、レーダー制御モジュール基板7は、検出信号を、無線で外部の中継機器に送信する。この定在波レーダーモジュール8の上面には、アンテナ8aが設置されており、電波はこのアンテナ8aを介して送受信される。なお、この定在波レーダーモジュール8はレーダー制御モジュール基板7に対して、傾斜可能になっており、この定在波レーダーモジュール8を傾斜させることにより、アンテナ8aの指向方向を調節できるようになっている。
【0024】
図3はレーダー制御モジュール基板7、定在波レーダーモジュール8、及びLED制御ユニット10のブロック図である。外部電源から、LED制御ユニット10の電源ブロック21に100Vの交流電源が入力され、電源ブロック21のAC−DCコンバータにより直流電源に変換されて、内部電源レギュレータ23に入力され、直流の5V電源が定在波レーダーモジュール8及びLEDコントローラマイコン24に供給される。また、AC−DCコンバータの出力は、LEDドライバ22にも供給されてLED6の駆動に使用される。LEDコントローラマイコン24は定在波レーダーモジュール8からの制御信号を受けて、LEDドライバ22にLEDのオン/オフの制御信号及び調光の制御信号を出力し、LEDドライバ22はこの制御信号に基づき、LED6を駆動する。
【0025】
レーダー制御モジュール基板7には、演算部31が設けられており、演算部31は、変調信号生成部38にてFM変調された周波数制御電圧を生成し、この周波数制御電圧をDA変換部39にてアナログ信号に変換された周波数制御信号がオペアンプ40を介して増幅された後、24GHz高周波モジュール35のVCOの制御入力に入力される。この周波数制御信号により、VCOは発信電波の周波数をスイープさせる。
【0026】
定在波レーダーモジュール8には、24GHz高周波送受信部35が設けられており、この24GHz高周波送受信部35は、24GHz帯VCO(電圧制御発振器)と平面アンテナ8aとが一体化されたモジュールである。そして、この送受信部35は、VCOにより平面アンテナ8aからマイクロ波が発信され、被反射体からの反射波がアンテナ8aに検出される。送受信部35には2個の検波器36a、36bが内蔵されており、検波器36a、36bは送信波及び受信波を検波する。
【0027】
アンテナ8aから電波を送信すると、反射物体がある場合は、アンテナ8aに反射波が戻ってきて、周波数が同じで進行方向が異なる波が重なり、定在波が発生する。VCOとアンテナ8aとを接続する線路上及びアンテナ給電部には、送信信号(進行波)と受信信号(反射波)が混在し、それらの合成で定在波が発生する。この場合に、VCOに供給するスイープ電圧を、少なくとも発信電波が被反射体に反射して戻ってくるまでの時間は一定に保持する必要があるため、前記スイープ電圧は、ステップ状に変化させる必要がある。そして、VCOを制御して周波数を順次切り替えることにより、複数の周波数に対する混合波の信号レベルが検波器36a、36bにより検出される。検波器36a、36bでは、送信波の電力と、反射波の電力と、定在波によって生じた成分とが検出される。得られた検波信号は、オペアンプ37a、37bで400kHz以下の必要な帯域が増幅され、演算部31内のAD変換部41によりデジタル信号に変換された後、信号処理部42に入力される。信号処理部42においては、入力される信号は周期関数で、その周期は被反射体からの距離に逆比例しているので、これをフーリエ変換することにより、周期の逆数である周波数を求めることによって、この周波数から被反射体までの距離を求めることができる。また、得られた波形の位相を基に、被反射体の微小変位情報を検出することができる。例えば、24GHzの場合は、微小変位は光速を4πfで除算した値となり、約±3.125mmの範囲の変位を検出することができる。このように、検波器36a、36bから検出された信号を信号処理することにより、被反射体からの距離、被反射体の速度及び変位を演算し、その経時変化を計測することにより、被反射体の動きを検出することができる。演算部42ではこの被反射体の動きを分析し、分析結果を警報部43に出力し、警報部43はLEDの点灯、点滅、消灯、警報点滅等の制御信号をLEDコントローラマイコン24に出力する。
【0028】
また、演算部31は、得られた被反射体の状態を、高周波ユニット32を介して無線で、また出力端子33を介して有線で、外部に送信する。また、演算部31は、オーディオアンプ34を介して、警報音を発する。この無線送信、有線送信又は警報音は、いずれか1つの手段を採用すればよい。
【0029】
次に、本発明の実施形態の動作について、信号処理部42の構成と共に説明する。定在波は、図4に示すように,信号源であるVCOから生成した送信波VTと、各ターゲットからの反射波VR1,VR2,VR3、・・・VRnとの干渉によって生じる。定在波レーダーは、この定在波を利用することによって、ターゲットの有無を検知し、各ターゲットまでの距離d1,d2,d3・・・dnを測定する。
【0030】
送信波(進行波)は、信号源の振幅をA、周波数をf、光速をc(3×108m/s)とすると、各数式1で表される。但し、周波数fは、図5に示すように、f0とfdで表される。
【0031】
【数1】
【0032】
k番目のターゲットの距離をdk、x軸上の任意の点における送信波に対する反射波の大きさの比をγk(反射係数の大きさ)、位相差をφk(反射係数の位相)とすれば、そのターゲットからの反射波は下記数式2にて表すことができる。
【0033】
【数2】
【0034】
アンテナから検出される検波出力は、合成波になるので、振幅Vcは下記数式3で表され、パワーは振幅の2乗であるので、合成波のパワーは、下記数式4で表される。
【0035】
【数3】
【0036】
【数4】
【0037】
送信波の大きさは、反射波の大きさより桁違いに大きいので、γkは1より極めて小さい。そこで、数式4に数式1及び数式2を代入して近似値をとると、下記数式5が得られる。
【0038】
【数5】
【0039】
この数式5において、{}内の第1項は、送信波のパワーを示し、第2項は、反射波のパワーを示し、第3項は、定在波によるパワーの変化分を示す。従来のレーダーは、第2項の反射波を受信して、信号処理を行うが、本発明においては、第3項の信号を信号処理する。このため、第1項目と第2項目を削除するため、合成波パワーp(fd、xs)をfdで微分して、この第1項目及び第2項目を除去する。
【0040】
ここで、ターゲット(被反射体)の数が1であるとすると、n=1を数式5に代入して、下記数式6が得られる。この数式6をグラフ化すると、図6のようになる。即ち、合成波のパワーは、固定値1+γ2と、周期関数との和となる。この図6において、周期関数の周波数(周期の逆数)はc/2dとなり、距離dの成分が入る。このため、周期から周波数を求めれば、距離dが求まることになる。数式6から、直流成分1+γ2を除去して、フーリエ変換すると、図7に示すように、距離スペクトルP(x)が求まる。
【0041】
【数6】
【0042】
先ず、下記数式7に示すフーリエ変換公式に対し、変数の置き換えをし、更に、観測位置を原点として、フーリエ変換すると、下記数式8に示す距離スペクトルが得られる。但し、Sa(z)=sin(z)/zとする。なお、数式8では、直流分がカットされていない。周期のある関数をフーリエ展開すると、その関数に含まれる直流成分と、振動成分(sin、cos)に分解されてしまう。距離スペクトルは、その公式上、下記数式8のように表示される。
【0043】
【数7】
【0044】
【数8】
【0045】
なお、数式8のA2fw(1+Σγk2)Sa(2πfw/c)x)は、直流成分であるが、この直流成分は、実際の回路において、コンデンサにより除去される。
【0046】
この数式8の第3式で表されるパワーP(x)をグラフ図でみると、図8に示すようになる。そして、数式8の{}内の第1項目の直流分を除去し、第3項目をcos成分を複素正弦波(解析信号)に変換して除去し、定在波成分である第2項目の成分を抽出することができる。しかし、図8に破線にて示すように、数式8の{}内の第2項目の成分には、虚数側の信号が漏れ込んでしまう。つまり、この部分の定在波成分には、虚数側の信号が漏れ込んだ値になってしまう。
【0047】
このような問題点を解消するために、本発明においては、図9に示すように、送信波とその反射波を合成した信号を検出する際に、送信波の波長をλとして、λ/8だけ離隔した2点にて、信号レベルを検出する。つまり、レーダーの進行方向をx軸にとった場合に、被反射体であるn個(nは自然数、図示は2個のみ)のターゲットからの反射波をアンテナが受信し、これを送信波と共に、x軸方向にλ/8だけ離隔した2個のパワーディテクタで検出し、これを信号処理する。このとき、この2個のディテクタが検出したパワーレベルをp(fd,x1)、p(fd,x2)とすると、x1=0の位置に置かれたディテクタの出力は、検出パワーを示す数式5に、x1=xs=0を代入して、下記数式9に示すp(fd、0)として求まり、x1=−λ/8の位置に置かれたディテクタの出力は、検出パワーを示す数式5に、x2=xs=−λ/8を代入して、下記数式9に示すp(fd、−λ/8)として求まる。この数式9に示すように、λ/8だけ離隔した2点で定在波を検出することにより、各位置(0,−λ/8)に置かれたディテクタの出力の定在波成分に、cosとsinの直交成分が得られ、これにより、虚像信号を消去することができ、虚像側から漏れ込む信号の影響を解消することができる。即ち、cosとsinの直交成分(X軸成分とY軸成分)から合成されるベクトルが求める解析信号である。通常、虚軸側の信号は測定できないのであるが、−λ/8の位置に、虚軸側の信号が計測できることになり、ベクトル合成信号を形成できる。このベクトルの回転速度が周波数になるので、本実施形態では、この周波数と位相を解析することになる。
【0048】
【数9】
【0049】
この数式9におけるxs=0の位置のディテクタの出力のうちの定在波成分をa、xs=−λ/8の位置のディテクタの出力のうちの定在波成分をbとすると、a、bは下記数式10にて表される。そして、数式8の第3式を下記数式11に基づいて置き換えをすると、下記数式12及び数式13が得られる。即ち、数式10が求めるX軸、Y軸(実信号、虚軸信号)を実信号に変換された形に置き換えることが可能になる。数式13は、まさに、時間方向の信号と、回転軸での信号を表現しているが、結局、この数式13により、回転する解析信号を計算できることがわかる。
【0050】
【数10】
【0051】
【数11】
【0052】
【数12】
【0053】
【数13】
【0054】
数式12の右辺のPDCは直流成分であり、m(fd)cos(θ(fd)−4π(f0+fd)/c・xs)は周期的に変化する定在波成分である。この定在波成分は、前述のごとく、xs=0の位置の成分aと、xs=−λ/8の位置の成分bとの合成成分a+jbは、sinとcosとの直交成分となり、aとbとから解析信号を合成することにより、不要の信号(図8に示す虚数側から漏れ込んだ信号)による影響が除去される。よって、この値(数式13の信号)を解析することにより、図10に示す目的の成分pa(fd,0)が得られる。
【0055】
なお、ターゲットが2個の場合の距離スペクトルは、図11に示すように、xs=0のパワーp(fd、0)とxs=−λ/8のパワーp(fd,−λ/8)との合成波から直流分を除去して、フーリエ変換することにより、距離に対応する周波数が得られ、距離d1,d2が求まる。
【0056】
図12は合成波の真数のスペクトルと、虚数のスペクトルを示す図である。電波の速度cは、約30万km/秒である。発信波の周波数のスイープを、75MHz幅(fw)で行った場合、この75MHzの波長は、c/fw=4mである。しかし、波形を標本化するためのスイープは、往復で4mのため、行きはその半分の2mとなる。この2mを1周期と呼ぶ。そこで、スイープ幅75MHzで20mを計測した場合、10周期を計測することになる。スイープ時間が256μsであるとすると、観測する波形の周波数は、10/256μs=39kHzとなる。同様に、200mを計測した場合、100周期であるので、100/256μs=390kHzとなる。そして、図12に示す検出されたスペクトルの周波数のレベルは反射の強さを示し、周波数は距離に置き換えられる。よって、図11に示すように、フーリエ変換して39kHzのところにピークが現れると、それは、距離d1=10mの位置からの反射波であることがわかり、390kHzのところにピークが現れると、それは、距離d2=100mの位置からの反射波であることがわかる。このようにして、ディテクタの合成波の検出パワーpa(fd)を微分して直流成分を除去し、フーリエ変換すると、被反射体までの距離を求めることができる。
【0057】
スイープ幅が200MHzの場合、1周期が0.75mになるので、10mの計測は10/0.75=13.3周期を観測することになり、スイープ時間が256μsである場合は、13.3/256=51.9kHzとなる。つまり、スイープ幅が200MHzの場合は、51.9kHzにピークが現れた場合に、被反射体までの距離が10mと観測される。従って、スイープ幅を調整し、スイープ時間を調整することにより、検波出力の周波数を調整することができ、電波法の規制により帯域幅が制限されているので、一般的には、スイープ時間を可変とすることにより、被反射体までの距離を測定する。
【0058】
次に、微小変位計測について説明する。数式8において、位相に着目すると、k番目のターゲットに対する位相は、下記数式14により求まり、距離dkの変化分をdk、位相の変化分をΔφkとすると、下記数式15が得られる。
【0059】
【数14】
【0060】
【数15】
【0061】
この数式15から、距離dの微小変位が求まる。周波数が24GHzの場合は、±3.125mmの変位を検知することが可能となる。
【0062】
以上のように、信号処理部42において、被反射体からの反射波を送信波に合成した定在波の分析により、被反射体の距離及び微小変位を計測することができる。この計測結果を経時的に把握すれば、被反射体の距離、速度及び変位を計測することができ、結局、被反射体の動きを計測できる。従来のレーダーであると、1〜2m以下は距離の測定が困難であったのに対し、本発明により、0mに近い至近距離から、200mの遠距離迄、距離の測定が可能である。また、本発明の場合は、微小変位の検知が可能であり、相対変位分解能は0.01mmにも及ぶ。しかも、定在波レーダーの場合は、衣服を通して、衣服に包まれた人体にて直接反射するので、人体の異常を高精度で検知できる。
【0063】
次に、本発明の実施形態に係る定在波レーダー内蔵型LED照明器具の利用例について説明する。図13はトイレの天井に本実施形態のLED照明器具を設置して、人体の異常を監視する場合、図14は風呂の天井に本実施形態のLED照明器具を設置して、人体の異常を監視する場合、図15は廊下の天井に本実施形態のLED照明器具を設置して、人体の異常を監視する場合を示す。
【0064】
先ず、図13に示すように、トイレ内で居住者が倒れた場合について説明する。最初に、LED照明器具の設置後、無人の場合の定在波を分析することにより、LED照明器具から、床面までの距離d4,便座までの距離d3を測定しておく。そして、トイレに居住者が入室した後、本実施形態のLED照明器具により、距離d2が計測される。この距離d2は居住者の頭までの距離である。これにより、d3,d4と異なる距離d2が計測されたことにより、居住者がトイレを利用中であることが判定される。その後、トイレの利用にとって適当な時間が経過した後、距離d2が計測されなくなった場合は、通常のトイレの利用が行われたと判定される。
【0065】
一方、利用者がトイレ内でうずくまっている場合及び座り込んでいる場合は、人体に異常が生じているのであるが、距離d5及び距離d6は、距離d3,d4とは異なると共に、便座に座っているときの頭までの距離d2より大きいので、異常事態が発生したことがわかる。この場合に、利用者に意識があれば、LED照明器具は利用者の動きも検出するので、置物ではなく、人体であることも判定され、人体に異常が生じたことが確実に把握される。これにより、警報部43が警報信号を出力し、トイレ利用者の異常事態を外部に知らせる。
【0066】
また、利用者がトイレの床に倒れており、意識がない場合、LED照明器具は頭の距離d2とは異なる距離d7を計測するが、人体の動きは計測できない。しかし、本発明においては、位相分析により微小変位を検出することができるので、倒れている人の呼吸数及び脈拍等の人体の微小な変位も検出できる。そこで、本発明により、置物ではなく、人体が倒れていることを判定できる。この場合に、定在波レーダーにより、衣服を透過して、その下の人体の表面の動きを直接計測できるので、より確実に人体の異常を検知することができる。また、演算部31に、呼吸数及び脈拍等の危険域を予め設定しておけば、呼吸等の検出により、人体か、置物かの区別だけでなく、人体の状況が重篤なものであるか、そうでないかも判定できる。
【0067】
図14に示す風呂場の場合、図15に示す廊下の場合等も、同様に、無人の場合の計測結果を求めておき、その計測距離を異常検知から排除しておけば、居住者の異常を判定することができる。このとき、通常の人体行動のときの検出される距離の範囲を設定し、その範囲から外れる距離を計測した場合に、居住者に異常が生じたと判定することもできる。しかも、微小変位から呼吸及び脈拍を計測できるので、人体であるか否か、及び人体の場合にどの程度重篤であるかも判定することができる。なお、図16は呼吸数を計測している状態を示すチャートである。図16に示すように、本発明により、異常呼吸を検出できることがわかる。
【0068】
図17は電車の天井に本発明の実施形態のLED照明器具を取り付け、LEDで照明すると共に、定在波を分析して電車の混み具合を判定する方法を示す。このように、本発明の実施形態のLED照明器具を電車の天井に取り付ければ、電車内の人体の数が多いか、少ないか及びその人体の数のおおよその数を検出することができる。従って、電車内が満員であるか、通常の混み具合であるか、又はすいているかを、電車の集中運行管理センタで容易に把握することができる。
【0069】
図18は、市街地の電柱に本発明の実施形態のLED照明器具を取り付け、LEDで照明すると共に、洪水で道路に水があふれた場合の水位及びこの異常な道路にどの程度の人が存在するかを判定する方法を示す。このように、本発明の実施形態のLED照明器具を電柱に取り付ければ、洪水で水があふれた道路の水位の変化及びその場合に道路にどの程度の人数が繰り出しているか等を、防災センターで管理判定することができる。
【0070】
本発明は、上記実施形態に限らず、種々の変形が可能である。例えば、図19は本発明の照明器具の他の形態を示す。この図19に示す照明器具は、図2に示す電球型と異なり、看板等の平面発光の表示面の裏側にLEDを配置したものであり、直下型の照明器具である。基板100上の中心位置に、電波を外部に送信すると共に、外部からの反射波を受信する送受信部102が設置されており、この送受信部102の周辺に、複数個のLED101が、例えば、等間隔で配置されている。これらのLED101及び送受信部102は、透光性のカバー103に覆われており、LED101からの照明光はこのカバー103を介して外部に出射し、送受信部102はこのカバー103を介して送信波及び反射波を送受信する。このカバー103は、光を拡散させる作用も有し、カバー103からLED照明光が外部に向けて拡散し、滑らかな照明光として出射される。この照明器具においても、送受信部102から電波の送信及び反射波の受信が可能である。なお、この直下方式においては、照明カバーの背後にLEDを配置して、LED光が直接外部に出射するようにしている。よって、LED光の光量は強いものの、送受信部102は、金属製の放熱基板101の背後(下方)に設けることはできず、レーダー送受信部の設置位置に制約がある。なお、平面発光の表示面とは、必ずしも、看板に限らないことは勿論である。看板のように、文字又は図形が付されていない壁のようなものでも良い。
【0071】
図20に示す照明器具は、導光方式の照明器具であり、導光板110の背後に電波の送受信部112を配置し、導光板110の側面から、複数個の等間隔で並べられたLED111から発光した照明光を導光板110内に導入し、照明光を導光板110内で反射させて、導光板110からその表面に垂直の方向に出射させる。この導光板110の前方にも、透光性のカバー113が配置されており、このカバー113も光の拡散作用を有し、拡散により滑らかな照明光を出射させることができる。導光板110内に進入したLED光は、導光板110内でその下面及び上面に反射し、導光板110の上面から、光量がその面内でほぼ均一な面発光光となって、外部に出射される。この照明器具においても、送受信部112から電波の送信及び反射波の受信が可能である。この導光方式においては、照明光を面発光させることができると共に、レーダー送受信部112の位置は、導光板110の背後でも良く、その設置場所に制約がない。
【符号の説明】
【0072】
1:口金
2:ケース本体
3:カバー
5:アルミニウム基板
6:LED
7:定在波レーダーモジュール基板
8:定在波レーダーモジュール
10:LED制御ユニット
11:基板
12:フレーム
31:演算部
35:24GHz高周波モジュール
42:信号処理部
【特許請求の範囲】
【請求項1】
少なくとも一部に透光性のカバーを備えたケースと、
このケース内に格納され、前記カバーを介して照明光を外部に照射する発光体としてのLED光源と、
前記ケース内に格納され、前記カバーを介して周波数掃引された電波を外部に送信し、λを送信波の波長として、外部の被反射体から受信した反射波を送信波長に基づく一定距離λ/8だけ離隔した2点にて検出し、送信波及び受信波から合成される定在波を検知する定在波検知部と、
前記定在波検知部が検知した合成波の周波数分布から、その直流成分を除去し、フーリエ変換して、距離スペクトルを求めて、前記被反射体までの距離を演算する演算部と、
得られた被反射体までの距離を、測定空間が無人の場合に得られた距離成分と比較し、前記測定空間内に進入してきた測定対象者との間の距離成分を抽出する信号処理部と、
測定対象者との間の距離成分から、前記測定対象者の身体状態並びに呼吸数及び脈拍を含む生理状態を判定する判定部と、
を有することを特徴とする定在波レーダー内蔵型LED照明器具。
【請求項2】
前記ケースの下部に、電球のソケット又はシーリングに装着可能なコネクタからなる給電部が設けられており、この給電部を介して、前記LED光源及び前記定在波検知部に給電されることを特徴とする請求項1に記載の定在波レーダー内蔵型LED照明器具。
【請求項3】
前記演算部、前記信号処理部及び前記判定部は、前記定在波検知部と共に、モジュールとして、前記ケース内に格納されていることを特徴とする請求項1又は2に記載の定在波レーダー内蔵型LED照明器具。
【請求項4】
前記判定部が、前記測定対象者との間の距離、又は前記測定対象者の呼吸数若しくは脈拍が、予め設定されている危険領域であると判定したとき、警報信号を外部の警報信号受信部に送信して、警報を発することを特徴とする請求項1乃至3のいずれか1項に記載の定在波レーダー内蔵型LED照明器具。
【請求項5】
前記請求項1乃至4に記載の定在波レーダー内蔵型LED照明器具を居宅又はビルの天井に設置して、居宅又はビル内の人体の異常を判定することを特徴とする定在波レーダー内蔵型LED照明器具の利用方法。
【請求項6】
前記請求項1乃至4に記載の定在波レーダー内蔵型LED照明器具を乗り物の天井に設置して、乗り物内の人体の混み具合を判定することを特徴とする定在波レーダー内蔵型LED照明器具の利用方法。
【請求項7】
前記請求項1乃至4に記載の定在波レーダー内蔵型LED照明器具を道路の照明のために設置して、道路にあふれた水の水位及び道路に位置する人体の混み具合を判定することを特徴とする定在波レーダー内蔵型LED照明器具の利用方法。
【請求項1】
少なくとも一部に透光性のカバーを備えたケースと、
このケース内に格納され、前記カバーを介して照明光を外部に照射する発光体としてのLED光源と、
前記ケース内に格納され、前記カバーを介して周波数掃引された電波を外部に送信し、λを送信波の波長として、外部の被反射体から受信した反射波を送信波長に基づく一定距離λ/8だけ離隔した2点にて検出し、送信波及び受信波から合成される定在波を検知する定在波検知部と、
前記定在波検知部が検知した合成波の周波数分布から、その直流成分を除去し、フーリエ変換して、距離スペクトルを求めて、前記被反射体までの距離を演算する演算部と、
得られた被反射体までの距離を、測定空間が無人の場合に得られた距離成分と比較し、前記測定空間内に進入してきた測定対象者との間の距離成分を抽出する信号処理部と、
測定対象者との間の距離成分から、前記測定対象者の身体状態並びに呼吸数及び脈拍を含む生理状態を判定する判定部と、
を有することを特徴とする定在波レーダー内蔵型LED照明器具。
【請求項2】
前記ケースの下部に、電球のソケット又はシーリングに装着可能なコネクタからなる給電部が設けられており、この給電部を介して、前記LED光源及び前記定在波検知部に給電されることを特徴とする請求項1に記載の定在波レーダー内蔵型LED照明器具。
【請求項3】
前記演算部、前記信号処理部及び前記判定部は、前記定在波検知部と共に、モジュールとして、前記ケース内に格納されていることを特徴とする請求項1又は2に記載の定在波レーダー内蔵型LED照明器具。
【請求項4】
前記判定部が、前記測定対象者との間の距離、又は前記測定対象者の呼吸数若しくは脈拍が、予め設定されている危険領域であると判定したとき、警報信号を外部の警報信号受信部に送信して、警報を発することを特徴とする請求項1乃至3のいずれか1項に記載の定在波レーダー内蔵型LED照明器具。
【請求項5】
前記請求項1乃至4に記載の定在波レーダー内蔵型LED照明器具を居宅又はビルの天井に設置して、居宅又はビル内の人体の異常を判定することを特徴とする定在波レーダー内蔵型LED照明器具の利用方法。
【請求項6】
前記請求項1乃至4に記載の定在波レーダー内蔵型LED照明器具を乗り物の天井に設置して、乗り物内の人体の混み具合を判定することを特徴とする定在波レーダー内蔵型LED照明器具の利用方法。
【請求項7】
前記請求項1乃至4に記載の定在波レーダー内蔵型LED照明器具を道路の照明のために設置して、道路にあふれた水の水位及び道路に位置する人体の混み具合を判定することを特徴とする定在波レーダー内蔵型LED照明器具の利用方法。
【図1】

【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】

【図13】
【図14】
【図15】
【図16】

【図17】
【図18】
【図19】

【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2013−80689(P2013−80689A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2012−22579(P2012−22579)
【出願日】平成24年2月4日(2012.2.4)
【出願人】(711010585)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成24年2月4日(2012.2.4)
【出願人】(711010585)
【Fターム(参考)】
[ Back to top ]