
容器をブロー成形し充填するための方法および装置
本発明による方法と装置は、容器をブロー成形して充填するために用いる。パリソンをまず熱コンディショニングし、次にブロー成形型内部でブロー圧を作用することにより容器に成形する。ブロー成形した容器を、その搬送経路の少なくとも一部分に沿って、回転する受け渡しホイールによって保持されている担持要素によって位置決めする。前記受け渡しホイールは、容器製造用のブローモジュールと容器充填用の充填モジュールとの間の連結部の少なくとも一部を成している。容器の搬送方向において前記受け渡しホイールの前方に前記ブローモジュールの搬出ホイールは容器用の担持要素を備え、前記搬送方向において前記受け渡しホイールの後方に前記充填モジュールの搬入ホイール(50)が容器(2)用の担持要素(54)を備えている。前記受け渡しホイール(41)の領域における前記担持要素(42)の数量を生産速度に依存して変化させる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、容器をブロー成形して充填する方法であって、パリソンをまず熱コンディショニングし、次にブロー成形型内部でブロー圧を作用することにより容器に成形し、ブロー成形した容器を、その搬送経路の少なくとも一部分に沿って、回転する受け渡しホイールによって保持されている担持要素によって位置決めし、前記受け渡しホイールが、容器製造用のブローモジュールと容器充填用の充填モジュールとの間の連結部の少なくとも一部を成している前記方法に関するものである。
また、本発明は、ブロー成形型を備える少なくとも1つのブローステーションと、ブロー成形される容器を搬送経路に沿って位置決めするための少なくとも1つの担持要素とを有する、容器をブロー成形して充填するための装置であって、前記担持要素が回転する受け渡しホイールによって保持され、該受け渡しホイールが、容器を製造するためのブローモジュールと容器を充填するための充填モジュールとの間の連結部の少なくとも一部分を形成している前記装置にも関わる。
【背景技術】
【0002】
ブロー圧の作用によって容器を成形する場合、熱可塑性材料から成るパリソンは、たとえばPET(ポリエチレンテレフタラート)から成るパリソンは、ブロー成形機内部で種々の加工ステーションに供給される。典型的には、この種のブロー成形機は加熱装置とブロー装置とを有しており、ブロー装置の領域では、予め温度調整されたパリソンを双方向配向によって膨張させることで容器が形成される。膨張は、膨張すべきパリソン内部に導入される加圧空気を用いて行う。このようなパリソン膨張時における方法技術上の経過に関しては、特許文献1に記載されている。その冒頭で述べられている、加圧状態にあるガスの導入は、成長している容器ブロー内への加圧ガス導入と、ブロー工程開始時のパリソン内部への加圧ガス導入とを含んでいる。
【0003】
容器成形用のブローステーションの基本構成は特許文献2に記載がある。パリソンを温度調整するための可能な実施態様は、特許文献3に説明されている。
【0004】
ブロー成形するための装置の内部では、パリソンとブロー成形された容器とを種々の操作装置を用いて搬送することができる。特に、パリソンを差し込む搬送心棒の使用が有利であることが明らかになった。しかし、他の担持装置を用いてパリソンを操作することもできる。パリソンを操作するための把持やっとこの使用、および、保持のためにパリソンの口領域に挿入可能な拡開心棒の使用も、適用可能な構成に属する。
【0005】
受け渡しホイールを使用した容器の操作は、たとえば特許文献4において、ブローホイールと搬出経路との間に受け渡しホイールを配置する構成のケースで説明されている。
【0006】
すでに述べたパリソンの操作は、一方ではいわゆる2段階方式で行われ、すなわちまずパリソンを射出成形法で製造し、次に中間蓄積し、その後になって初めてその温度に関しコンディショニングを行い、ブロー処理をして容器を形成させる。他方、いわゆる1段階方式が適用され、すなわちパリソンを射出成形技術で製造し十分固化させた直後に適当に温度調整し、その後ブロー処理する。
【0007】
使用するブローステーションに関しては、種々の実施態様が知られている。回転する搬送ホイール上に配置されているブローステーションでは、型担持体を本のように開閉する構成のものが頻繁に使用される。他方、互いに相対的に変位可能な型担持体または他の態様で案内される型担持体を使用することも可能である。容器成形用の複数のキャビティを受容するために特に適した定置のブローステーションの場合は、典型的には、互いに並列に配置される複数個のプレートが型担持体として使用される。
【0008】
パリソンを操作し、ブロー成形される容器を操作するため、成形機内部に、パリソンまたは瓶用の担持要素を備えたいわゆる受け渡しホイールを使用することが多い。この場合、担持要素はパリソンまたは瓶にダイレクトに係合するか、或いは、パリソンまたは瓶をダイレクトに保持する別個の搬送要素を必要とする。受け渡し工程を補助するため、担持要素は受け渡しホイールに対し典型的には回動可能であるように支持されている。加えて、伸縮性も実現されることが多い。担持要素に対する位置設定にはカム制御が使用される。このため、担持要素はカムローラでもって定置の曲線に沿って案内される。
【0009】
すでに述べたブローモジュールは、実質的に、ブローステーションを備えた回転するブローホイールを含み、充填モジュールは、実質的に、充填ステーションを備えた回転可能な充填ホイールを含んでいる。
【0010】
担持要素を備えた、回転する受け渡しホイールも使用される。これは、いわゆるブロック機において、ブローモジュールを充填モジュールと連結させるためである。この種のブロック配置構成の場合、単位時間当たりの最大充填量が充填モジュールによって設定されるという問題がある。たとえば0.5リットルの容積をもった容器を製造するためのブロー成形機を充填モジュールと連結させ、両モジュールをその出力に関しその境界条件を考慮して選定したとすると、1リットルの容積をもつ容器の製造用にブロー成形機を改変し、充填モジュールによってこの容量大の容器を単位時間当たり同数充填させるのは、簡単に可能ではない。
【0011】
同様に、この実施態様の場合、ブロー成形機のブローホイールをより緩速に回転させるのも容易でない。というのは、カム制御型ブロー成形機の場合、プロセス技術上のパラメータ(たとえば延伸速度)をブローホイールの回転から頻繁に導出して変化させることは簡単でないからである。従って、相互に異なった容量の容器を処理する際にブローモジュールと充填モジュールとの出力を互いに同調させることは困難である。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】独国特許出願公開第4340291号明細書
【特許文献2】独国特許出願公開第4212583号明細書
【特許文献3】独国特許出願公開第2352926号明細書
【特許文献4】独国特許出願公開第19906438号明細書
【発明の概要】
【発明が解決しようとする課題】
【0013】
それ故、本発明の課題は、簡潔な機械的構成で異なった容量の容器を製造し充填できるように冒頭で述べた種類の方法を改善することである。
本発明の他の課題は、簡潔な機械的構成で異なった容量の容器を製造し充填できるように冒頭で述べた種類の装置を改善することである。
【課題を解決するための手段】
【0014】
上記課題は、方法に関しては、受け渡しホイールの領域における担持要素の数量を生産速度に依存して変化させることによって解決される。
【0015】
特に、容器の搬送方向において受け渡しホイールの前方にブローモジュールの搬出ホイールが容器用の担持要素を備え、前記搬送方向において受け渡しホイールの後方に充填モジュールの搬入ホイールが容器用の担持要素を備えている。
【0016】
上記の課題は、装置に関しては、受け渡しホイールの領域における担持要素の数量が生産速度に依存して可変であることによって解決される。
【0017】
特に、容器の搬送方向において受け渡しホイールの前方においてブローモジュールの搬出ホイールが容器用の担持要素を備え、前記搬送方向において受け渡しホイールの後方において充填モジュールの搬入ホイールが容器用の担持要素を備えている。
【0018】
ブローモジュールと充填モジュールとの間に数量可変な担持要素を備えた受け渡しホイールを配置することにより、使用するどのブローステーションでも容器をブロー成形しないようにブローモジュールを作動させることが可能である。たとえば、ブローステーションの1つおきにブロー成形型を備えさせ、1つおきのブローステーションでのみ容器を製造することも可能である。これにより、受け渡しホイールはたとえば搬出ホイールの1つおきの担持要素からのみブロー成形した容器を受け取り、この容器を充填モジュールの搬入モジュールの対応する搬送要素へ隙間なく受け渡す。
【0019】
冒頭で述べた、0.5リットルの充填容量をもつ容器の生産を、1リットルの充填容量をもつ容器の生産に切り替える例では、この例では2倍の充填量で容器を充填するための十分な時間を提供するため、充填モジュールの領域の搬送要素を半分の搬送速度で作動させる。これに対し、ブローモジュールの領域では、ブローホイールをそのままの同じ速度で回転させ、これによりプロセス技術上のパラメータの維持を確保することができる。従って、受け渡しホイールはブローモジュールによって提供される容器間の隙間を埋め、充填モジュールの領域での容器の隙間のない配置を可能にする。
【0020】
すでに述べたように、数量可変な担持要素(たとえば数量可変なやっとこまたは数量可変な担持アーム)を備えた受け渡しホイールは、ブローモジュールの搬出ホイールと充填モジュールの搬入ホイールとの間に配置されていてよい。しかし、受け渡しホイールを、ブローホイールから充填ホイールまで延在している容器の搬送経路の他の個所に配置してもよい。特に、受け渡しホイールを充填機内部に配置して、たとえば容器を充填ホイールにダイレクトに受け渡すようにしてもよい。
【0021】
受け渡し工程を所定どおりに実施するため、受け渡しホイールの回転の際に担持要素は受け渡しホイールに対し相対的に運動する。
【0022】
特に、担持要素が受け渡しホイールに対し相対的に回動するのが有利であることが明らかになった。
【0023】
さらに、担持要素を受け渡しホイールに対し相対的に伸縮させてもよい。
【0024】
実施する運動の正確な再現性を可能にするため、担持要素をカム制御部によって受け渡しホイールに対し相対的に位置決めする。
【0025】
担持要素の運動軌道を、受け渡しホイールの領域での異なる数量の担持要素に適合させるため、生産速度が異なる場合、担持要素に対し異なる制御曲線を使用する。それぞれの制御曲線は、受け渡しホイールの領域での担持要素の数量が異なっている場合も、よって担持要素動詞の間隔が異なっている場合も、それぞれの受け渡しが確実に実施されるよう保証している。
【0026】
連続的な運動工程を達成するため、生産速度が半分である場合、受け渡しホイールの領域における担持要素の数量を半分にする。
【0027】
位置決めの他の実施態様は、担持要素をサーボモータによって位置決めすることにある。
【図面の簡単な説明】
【0028】
次に、本発明の実施形態を図面を用いて説明する。
【図1】パリソンから容器を製造するためのブローステーションの斜視図である。
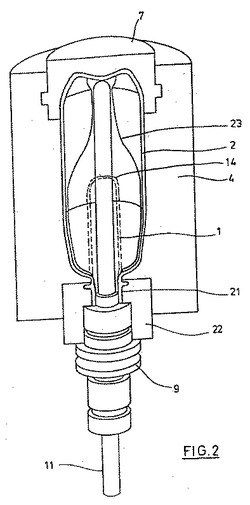
【図2】パリソンを延伸し膨張させるためのブロー成形型の縦断面図である。
【図3】パリソンから容器を製造するための装置の基本構成を説明する概略図である。
【図4】加熱容量を増大させた加熱経路の変形実施形態を示す図である。
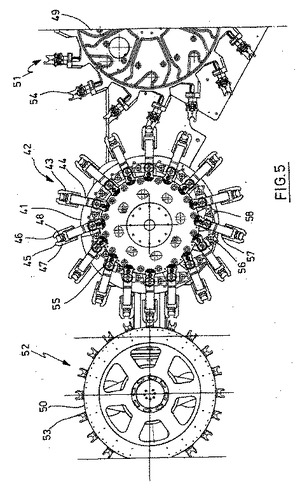
【図5】搬出ホイールと搬入ホイールとの間に位置するようにブロー成形した容器用の担持要素に設けられる受け渡しホイールをフル装備で示した図である。
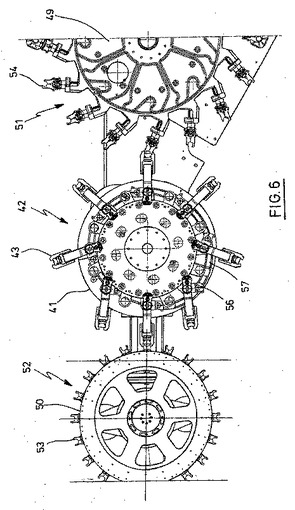
【図6】受け渡しホイールの領域で担持要素を1つごと除去した図5の配置構成を示す図である。
【発明を実施するための形態】
【0029】
図1および図2には、パリソン(1)を容器(2)に成形するための装置の基本構成が図示されている。
【0030】
容器(2)を形成するための装置は実質的にブローステーション(3)から成り、該ブローステーション(3)はブロー成形型(4)を備え、ブロー成形型(4)にパリソン(1)を挿着可能である。パリソン(1)はポリエチレンテレフタラートから成る射出成型品であってよい。ブロー成形型(4)内へのパリソン(1)の挿着を可能にし、完成した容器(2)の取り出しを可能にするため、ブロー成形型(4)は型半部分(5,6)と底部部分(7)とから成り、底部部分(7)は昇降装置(8)によって位置決め可能である。パリソン(1)はブローステーション(3)の領域において搬送心棒(9)によって保持されていてよく、搬送心棒(9)はパリソン(1)とともに装置内部の多数の処理ステーションを通過する。しかし、パリソン(1)をたとえばやっとこまたは他の操作手段を介してダイレクトにブロー成形型(4)に挿着するようにしてもよい。
【0031】
加圧空気の供給を可能にするため、搬送心棒(9)の下方に、パリソン(1)に加圧空気を供給し、同時に搬送心棒(8)に対する密封をも行う接続ピストン(10)が配置されている。しかし、変形実施形態において、基本的には固定の加圧空気供給管を使用してもよい。
【0032】
この実施形態では、パリソン(1)の延伸は、シリンダ(12)によって位置決めされる延伸棒(11)を用いて行われる。他の実施形態によれば、ピックオフローラの作用を受けるカムセグメントを介して延伸棒(11)の機械的位置決めを実施する。カムセグメントの使用は、特に、複数のブローステーション(3)が1つの回転ブローホイール上に配置されている場合に合目的である。
【0033】
図1に図示した実施形態の場合、延伸システムは、2つのシリンダ(12)のタンデム配置が可能であるように構成されている。本来の延伸工程を開始する前に、まず延伸棒(11)を1次シリンダ(13)によってパリソン(1)の底部(14)の領域まで走行させる。本来の延伸工程を実施している間、延伸棒を走出させた1次シリンダ(13)を、該1次シリンダ(13)を担持している往復台(15)とともに、2次シリンダ(16)によって或いはカム制御部を介して位置決めする。特に、2次シリンダをカム制御して使用すること、すなわち延伸工程を実施している間に曲線軌道に沿って滑動するガイドローラ(17)によって実際の延伸ポジションを設定することが考えられる。ガイドローラ(17)は2次シリンダ(16)によって案内軌道に対し押圧される。往復台(15)は2つの案内要素(18)に沿って滑動する。
【0034】
担持体(19,20)の領域に配置されている型半部分(5,6)を閉じた後、ロック装置(20)を用いて担持体(19,20)相互のロックを行う。
【0035】
パリソン(1)の口部分(21)の種々の形状に適合させるため、図2によれば、ブロー成形型(4)の領域に別個のスクリューインサート(22)を使用する。
【0036】
図2は、ブロー成形された容器(2)に加えて、破線で示したパリソン(1)と、成長段階にある容器ブロー(23)をも示している。
【0037】
図3は、加熱経路(24)と回転ブローホイール(25)とを備えたブロー成形機の基本構成を示している。パリソン(1)は、パリソン装入部(26)を起点として、受け渡しホイール(27,28,29)によって加熱経路(24)の領域へ搬送される。パリソン(1)を温度調整するため、加熱経路(24)に沿って放射加熱器(30)とファン(31)とが配置されている。パリソン(1)を十分に温度調整した後、パリソンをブローホイール(25)へ受け渡す。ブローホイール(25)の領域にはブローステーション(3)が配置されている。ブロー成形を終えた容器(2)は他の受け渡しホイールによって搬出経路へ供給される。
【0038】
容器(2)内部に充填される食糧、特に飲料物の長期使用を保証する材料特性を容器(2)が有するようにパリソン(1)を容器(2)に成形できるようにするには、パリソン(1)を加熱、配向する際に特殊な方法ステップを維持しなければならない。さらに、特別のサイズ規定を維持することによって有利な効果を得ることができる。
【0039】
熱可塑性材料として種々のプラスチックを使用することができる。たとえばPET,PENまたはPPを使用することができる。
【0040】
配向工程を実施している間のパリソン(1)の膨張は、加圧空気を供給することによって行う。加圧空気の供給は、ガス(たとえば圧縮空気)を低圧レベルで供給するプレブロー段階と、これに引き続き行われる、ガスをより高圧で供給するメインブロー段階とに分けられる。プレブロー段階では、典型的には、10バールないし25バールのインターバルの圧力をもった加圧空気を使用し、メインブロー段階では、25バールないし40バールのインターバルの圧力をもった加圧空気を使用する。
【0041】
図3からわかるように、図示した実施形態では、加熱経路(24)は多数の周回する搬送要素(33)から形成され、これらの搬送要素は互いにチェーン状に配列されて転向ホイール(34)に沿って案内されている。特に、チェーン状の配置により、実質的に長方形の基本輪郭を張ることが考慮されている。図示した実施形態では、加熱経路(24)の受け渡しホイール(29)側および搬入ホイール(35)側の互いに隣接する転向部領域に2つの比較的小さなサイズの転向ホイール(36)が使用され、反対側には比較的大きなサイズの1つの転向ホイール(34)が使用されている。しかし、基本的には任意の他のガイドも考えられる。
【0042】
受け渡しホイール(29)と搬入ホイール(35)とを互いにできるだけ密に配置できるようにするには、図示した配置が特に合目的であることが明らかになった。というのは、加熱経路(24)の対応する膨張領域に3つの転向ホイール(34,36)が配置され、すなわちより小さな転向ホイール(36)が加熱経路(24)の直線部への移行領域に配置され、より大きな転向ホイール(34)が受け渡しホイール(29)および搬入ホイール(35)へ直接受け渡す領域に配置されているからである。チェーン状の搬送要素(33)を使用する代わりに、たとえば回転する加熱ホイールを使用することも可能である。
【0043】
容器(21)のブロー成形が終了した後、容器を取り出しホイール(37)によってブローステーション(3)の領域から取り出し、受け渡しホイール(28)と搬出ホイール(38)とを介して搬出経路(32)へ搬出する。
【0044】
図4に図示した加熱経路(24)の変形実施形態では、より多くの放射加熱器(30)によって、単位時間当たりより多くのパリソン(1)を温度調整することができる。ここで、ファン(31)は冷却空気を冷却空気通路(39)の領域へ誘導し、冷却空気通路(39)はそれぞれ付設の放射加熱器(30)に対向配置され、排流穴を介して冷却空気を放出する。排流方向を設定することにより、冷却空気の流動方向は実質的にパリソン(1)の搬送方向に対し横方向に実現される。冷却空気通路(39)は放射加熱器(30)に対向する表面の領域に加熱放射線用のリフレクタを有していてよく、同様に、放出された冷却空気を介して放射加熱器(30)の冷却をも実現してよい。
【0045】
図5は、容器(2)の操作に用いる担持要素(42)を備えた受け渡しホイール(41)を示している。図示した実施形態では、担持要素(42)は操作要素(43)と担持アーム(44)とから形成されている。操作要素(43)は図示の実施形態ではやっとこ状に構成されて2つのやっとこアーム(45,46)を有しており、やっとこアーム(45,46)は回転軸線(47,48)に対して相対的に回動可能であるように担持アーム(44)によって保持されている。この種の操作要素(43)は容器(2)をダイレクトに把持する。しかし操作要素(43)は、パリソン(1)または容器(2)を担持する搬送要素と接触するように実現されていてもよい。この種の搬送要素はたとえば搬送心棒(9)として実現されていてよい。
【0046】
受け渡しホイール(41)は搬出ホイール(49)と搬入ホイール(50)との間に配置されている。搬出ホイール(49)はブローモジュール(51)に付設され、搬入ホイール(50)は充填モジュール(52)に付設されている。搬入ホイール(50)は複数個の担持要素(53)を有し、搬出ホイール(49)は複数個の担持要素(54)を有している。
【0047】
担持要素(42)は、受け渡しホイール(41)の領域で、回転軸線(55)に対し相対的に回動可能であるように支持されている。担持要素(42)の回動運動は、曲線軌道(57)に沿って案内されているカムローラ(56)を使用して行われる。カムローラ(56)は、回動運動を簡単に行えるようにするために、担持アーム(44)の横アーム(58)の領域に配置されていてよい。
【0048】
図5は、受け渡しホイール(41)の領域に最大数の担持要素(42)を配置した実施形態を示している。この場合、搬出ホイール(49)と受け渡しホイール(41)と搬入ホイール(50)とが回転すると、搬出ホイール(49)の各担持要素(54)はブロー成形した容器を受け渡しホイール(41)の担持要素(42)に受け渡し、受け渡しホイール(41)の各担持要素(42)は容器を搬入ホイール(50)の担持要素(50)に受け渡す。このような作動状態は、構造的に予め設定された、ブローモジュール(51)および充填モジュール(52)双方の最大仕事量に相当している。
【0049】
図6は、受け渡しホイール(41)の領域での担持要素(42)の数量を図5のものに比べて半分にした作動状態を示している。担持要素(42)を1つおきに省略したものである。この作動状態では、搬出ホイール(49)は図5の場合と同じ回転数で回転するが、担持要素(54)は1つおきにブロー成形した容器を搬送する。曲線軌道(57)を対応的に修正することにより、担持要素(42)の回動運動は、図5の実施形態に比べて搬入ホイール(50)の回転数が半分の場合、搬入ホイール(50)の各担持要素(53)が1個の容器を積載するように、設定される。これにより、充填モジュール(52)の領域では、容器の隙間のない連続積載を保証することができる。
【技術分野】
【0001】
本発明は、容器をブロー成形して充填する方法であって、パリソンをまず熱コンディショニングし、次にブロー成形型内部でブロー圧を作用することにより容器に成形し、ブロー成形した容器を、その搬送経路の少なくとも一部分に沿って、回転する受け渡しホイールによって保持されている担持要素によって位置決めし、前記受け渡しホイールが、容器製造用のブローモジュールと容器充填用の充填モジュールとの間の連結部の少なくとも一部を成している前記方法に関するものである。
また、本発明は、ブロー成形型を備える少なくとも1つのブローステーションと、ブロー成形される容器を搬送経路に沿って位置決めするための少なくとも1つの担持要素とを有する、容器をブロー成形して充填するための装置であって、前記担持要素が回転する受け渡しホイールによって保持され、該受け渡しホイールが、容器を製造するためのブローモジュールと容器を充填するための充填モジュールとの間の連結部の少なくとも一部分を形成している前記装置にも関わる。
【背景技術】
【0002】
ブロー圧の作用によって容器を成形する場合、熱可塑性材料から成るパリソンは、たとえばPET(ポリエチレンテレフタラート)から成るパリソンは、ブロー成形機内部で種々の加工ステーションに供給される。典型的には、この種のブロー成形機は加熱装置とブロー装置とを有しており、ブロー装置の領域では、予め温度調整されたパリソンを双方向配向によって膨張させることで容器が形成される。膨張は、膨張すべきパリソン内部に導入される加圧空気を用いて行う。このようなパリソン膨張時における方法技術上の経過に関しては、特許文献1に記載されている。その冒頭で述べられている、加圧状態にあるガスの導入は、成長している容器ブロー内への加圧ガス導入と、ブロー工程開始時のパリソン内部への加圧ガス導入とを含んでいる。
【0003】
容器成形用のブローステーションの基本構成は特許文献2に記載がある。パリソンを温度調整するための可能な実施態様は、特許文献3に説明されている。
【0004】
ブロー成形するための装置の内部では、パリソンとブロー成形された容器とを種々の操作装置を用いて搬送することができる。特に、パリソンを差し込む搬送心棒の使用が有利であることが明らかになった。しかし、他の担持装置を用いてパリソンを操作することもできる。パリソンを操作するための把持やっとこの使用、および、保持のためにパリソンの口領域に挿入可能な拡開心棒の使用も、適用可能な構成に属する。
【0005】
受け渡しホイールを使用した容器の操作は、たとえば特許文献4において、ブローホイールと搬出経路との間に受け渡しホイールを配置する構成のケースで説明されている。
【0006】
すでに述べたパリソンの操作は、一方ではいわゆる2段階方式で行われ、すなわちまずパリソンを射出成形法で製造し、次に中間蓄積し、その後になって初めてその温度に関しコンディショニングを行い、ブロー処理をして容器を形成させる。他方、いわゆる1段階方式が適用され、すなわちパリソンを射出成形技術で製造し十分固化させた直後に適当に温度調整し、その後ブロー処理する。
【0007】
使用するブローステーションに関しては、種々の実施態様が知られている。回転する搬送ホイール上に配置されているブローステーションでは、型担持体を本のように開閉する構成のものが頻繁に使用される。他方、互いに相対的に変位可能な型担持体または他の態様で案内される型担持体を使用することも可能である。容器成形用の複数のキャビティを受容するために特に適した定置のブローステーションの場合は、典型的には、互いに並列に配置される複数個のプレートが型担持体として使用される。
【0008】
パリソンを操作し、ブロー成形される容器を操作するため、成形機内部に、パリソンまたは瓶用の担持要素を備えたいわゆる受け渡しホイールを使用することが多い。この場合、担持要素はパリソンまたは瓶にダイレクトに係合するか、或いは、パリソンまたは瓶をダイレクトに保持する別個の搬送要素を必要とする。受け渡し工程を補助するため、担持要素は受け渡しホイールに対し典型的には回動可能であるように支持されている。加えて、伸縮性も実現されることが多い。担持要素に対する位置設定にはカム制御が使用される。このため、担持要素はカムローラでもって定置の曲線に沿って案内される。
【0009】
すでに述べたブローモジュールは、実質的に、ブローステーションを備えた回転するブローホイールを含み、充填モジュールは、実質的に、充填ステーションを備えた回転可能な充填ホイールを含んでいる。
【0010】
担持要素を備えた、回転する受け渡しホイールも使用される。これは、いわゆるブロック機において、ブローモジュールを充填モジュールと連結させるためである。この種のブロック配置構成の場合、単位時間当たりの最大充填量が充填モジュールによって設定されるという問題がある。たとえば0.5リットルの容積をもった容器を製造するためのブロー成形機を充填モジュールと連結させ、両モジュールをその出力に関しその境界条件を考慮して選定したとすると、1リットルの容積をもつ容器の製造用にブロー成形機を改変し、充填モジュールによってこの容量大の容器を単位時間当たり同数充填させるのは、簡単に可能ではない。
【0011】
同様に、この実施態様の場合、ブロー成形機のブローホイールをより緩速に回転させるのも容易でない。というのは、カム制御型ブロー成形機の場合、プロセス技術上のパラメータ(たとえば延伸速度)をブローホイールの回転から頻繁に導出して変化させることは簡単でないからである。従って、相互に異なった容量の容器を処理する際にブローモジュールと充填モジュールとの出力を互いに同調させることは困難である。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】独国特許出願公開第4340291号明細書
【特許文献2】独国特許出願公開第4212583号明細書
【特許文献3】独国特許出願公開第2352926号明細書
【特許文献4】独国特許出願公開第19906438号明細書
【発明の概要】
【発明が解決しようとする課題】
【0013】
それ故、本発明の課題は、簡潔な機械的構成で異なった容量の容器を製造し充填できるように冒頭で述べた種類の方法を改善することである。
本発明の他の課題は、簡潔な機械的構成で異なった容量の容器を製造し充填できるように冒頭で述べた種類の装置を改善することである。
【課題を解決するための手段】
【0014】
上記課題は、方法に関しては、受け渡しホイールの領域における担持要素の数量を生産速度に依存して変化させることによって解決される。
【0015】
特に、容器の搬送方向において受け渡しホイールの前方にブローモジュールの搬出ホイールが容器用の担持要素を備え、前記搬送方向において受け渡しホイールの後方に充填モジュールの搬入ホイールが容器用の担持要素を備えている。
【0016】
上記の課題は、装置に関しては、受け渡しホイールの領域における担持要素の数量が生産速度に依存して可変であることによって解決される。
【0017】
特に、容器の搬送方向において受け渡しホイールの前方においてブローモジュールの搬出ホイールが容器用の担持要素を備え、前記搬送方向において受け渡しホイールの後方において充填モジュールの搬入ホイールが容器用の担持要素を備えている。
【0018】
ブローモジュールと充填モジュールとの間に数量可変な担持要素を備えた受け渡しホイールを配置することにより、使用するどのブローステーションでも容器をブロー成形しないようにブローモジュールを作動させることが可能である。たとえば、ブローステーションの1つおきにブロー成形型を備えさせ、1つおきのブローステーションでのみ容器を製造することも可能である。これにより、受け渡しホイールはたとえば搬出ホイールの1つおきの担持要素からのみブロー成形した容器を受け取り、この容器を充填モジュールの搬入モジュールの対応する搬送要素へ隙間なく受け渡す。
【0019】
冒頭で述べた、0.5リットルの充填容量をもつ容器の生産を、1リットルの充填容量をもつ容器の生産に切り替える例では、この例では2倍の充填量で容器を充填するための十分な時間を提供するため、充填モジュールの領域の搬送要素を半分の搬送速度で作動させる。これに対し、ブローモジュールの領域では、ブローホイールをそのままの同じ速度で回転させ、これによりプロセス技術上のパラメータの維持を確保することができる。従って、受け渡しホイールはブローモジュールによって提供される容器間の隙間を埋め、充填モジュールの領域での容器の隙間のない配置を可能にする。
【0020】
すでに述べたように、数量可変な担持要素(たとえば数量可変なやっとこまたは数量可変な担持アーム)を備えた受け渡しホイールは、ブローモジュールの搬出ホイールと充填モジュールの搬入ホイールとの間に配置されていてよい。しかし、受け渡しホイールを、ブローホイールから充填ホイールまで延在している容器の搬送経路の他の個所に配置してもよい。特に、受け渡しホイールを充填機内部に配置して、たとえば容器を充填ホイールにダイレクトに受け渡すようにしてもよい。
【0021】
受け渡し工程を所定どおりに実施するため、受け渡しホイールの回転の際に担持要素は受け渡しホイールに対し相対的に運動する。
【0022】
特に、担持要素が受け渡しホイールに対し相対的に回動するのが有利であることが明らかになった。
【0023】
さらに、担持要素を受け渡しホイールに対し相対的に伸縮させてもよい。
【0024】
実施する運動の正確な再現性を可能にするため、担持要素をカム制御部によって受け渡しホイールに対し相対的に位置決めする。
【0025】
担持要素の運動軌道を、受け渡しホイールの領域での異なる数量の担持要素に適合させるため、生産速度が異なる場合、担持要素に対し異なる制御曲線を使用する。それぞれの制御曲線は、受け渡しホイールの領域での担持要素の数量が異なっている場合も、よって担持要素動詞の間隔が異なっている場合も、それぞれの受け渡しが確実に実施されるよう保証している。
【0026】
連続的な運動工程を達成するため、生産速度が半分である場合、受け渡しホイールの領域における担持要素の数量を半分にする。
【0027】
位置決めの他の実施態様は、担持要素をサーボモータによって位置決めすることにある。
【図面の簡単な説明】
【0028】
次に、本発明の実施形態を図面を用いて説明する。
【図1】パリソンから容器を製造するためのブローステーションの斜視図である。
【図2】パリソンを延伸し膨張させるためのブロー成形型の縦断面図である。
【図3】パリソンから容器を製造するための装置の基本構成を説明する概略図である。
【図4】加熱容量を増大させた加熱経路の変形実施形態を示す図である。
【図5】搬出ホイールと搬入ホイールとの間に位置するようにブロー成形した容器用の担持要素に設けられる受け渡しホイールをフル装備で示した図である。
【図6】受け渡しホイールの領域で担持要素を1つごと除去した図5の配置構成を示す図である。
【発明を実施するための形態】
【0029】
図1および図2には、パリソン(1)を容器(2)に成形するための装置の基本構成が図示されている。
【0030】
容器(2)を形成するための装置は実質的にブローステーション(3)から成り、該ブローステーション(3)はブロー成形型(4)を備え、ブロー成形型(4)にパリソン(1)を挿着可能である。パリソン(1)はポリエチレンテレフタラートから成る射出成型品であってよい。ブロー成形型(4)内へのパリソン(1)の挿着を可能にし、完成した容器(2)の取り出しを可能にするため、ブロー成形型(4)は型半部分(5,6)と底部部分(7)とから成り、底部部分(7)は昇降装置(8)によって位置決め可能である。パリソン(1)はブローステーション(3)の領域において搬送心棒(9)によって保持されていてよく、搬送心棒(9)はパリソン(1)とともに装置内部の多数の処理ステーションを通過する。しかし、パリソン(1)をたとえばやっとこまたは他の操作手段を介してダイレクトにブロー成形型(4)に挿着するようにしてもよい。
【0031】
加圧空気の供給を可能にするため、搬送心棒(9)の下方に、パリソン(1)に加圧空気を供給し、同時に搬送心棒(8)に対する密封をも行う接続ピストン(10)が配置されている。しかし、変形実施形態において、基本的には固定の加圧空気供給管を使用してもよい。
【0032】
この実施形態では、パリソン(1)の延伸は、シリンダ(12)によって位置決めされる延伸棒(11)を用いて行われる。他の実施形態によれば、ピックオフローラの作用を受けるカムセグメントを介して延伸棒(11)の機械的位置決めを実施する。カムセグメントの使用は、特に、複数のブローステーション(3)が1つの回転ブローホイール上に配置されている場合に合目的である。
【0033】
図1に図示した実施形態の場合、延伸システムは、2つのシリンダ(12)のタンデム配置が可能であるように構成されている。本来の延伸工程を開始する前に、まず延伸棒(11)を1次シリンダ(13)によってパリソン(1)の底部(14)の領域まで走行させる。本来の延伸工程を実施している間、延伸棒を走出させた1次シリンダ(13)を、該1次シリンダ(13)を担持している往復台(15)とともに、2次シリンダ(16)によって或いはカム制御部を介して位置決めする。特に、2次シリンダをカム制御して使用すること、すなわち延伸工程を実施している間に曲線軌道に沿って滑動するガイドローラ(17)によって実際の延伸ポジションを設定することが考えられる。ガイドローラ(17)は2次シリンダ(16)によって案内軌道に対し押圧される。往復台(15)は2つの案内要素(18)に沿って滑動する。
【0034】
担持体(19,20)の領域に配置されている型半部分(5,6)を閉じた後、ロック装置(20)を用いて担持体(19,20)相互のロックを行う。
【0035】
パリソン(1)の口部分(21)の種々の形状に適合させるため、図2によれば、ブロー成形型(4)の領域に別個のスクリューインサート(22)を使用する。
【0036】
図2は、ブロー成形された容器(2)に加えて、破線で示したパリソン(1)と、成長段階にある容器ブロー(23)をも示している。
【0037】
図3は、加熱経路(24)と回転ブローホイール(25)とを備えたブロー成形機の基本構成を示している。パリソン(1)は、パリソン装入部(26)を起点として、受け渡しホイール(27,28,29)によって加熱経路(24)の領域へ搬送される。パリソン(1)を温度調整するため、加熱経路(24)に沿って放射加熱器(30)とファン(31)とが配置されている。パリソン(1)を十分に温度調整した後、パリソンをブローホイール(25)へ受け渡す。ブローホイール(25)の領域にはブローステーション(3)が配置されている。ブロー成形を終えた容器(2)は他の受け渡しホイールによって搬出経路へ供給される。
【0038】
容器(2)内部に充填される食糧、特に飲料物の長期使用を保証する材料特性を容器(2)が有するようにパリソン(1)を容器(2)に成形できるようにするには、パリソン(1)を加熱、配向する際に特殊な方法ステップを維持しなければならない。さらに、特別のサイズ規定を維持することによって有利な効果を得ることができる。
【0039】
熱可塑性材料として種々のプラスチックを使用することができる。たとえばPET,PENまたはPPを使用することができる。
【0040】
配向工程を実施している間のパリソン(1)の膨張は、加圧空気を供給することによって行う。加圧空気の供給は、ガス(たとえば圧縮空気)を低圧レベルで供給するプレブロー段階と、これに引き続き行われる、ガスをより高圧で供給するメインブロー段階とに分けられる。プレブロー段階では、典型的には、10バールないし25バールのインターバルの圧力をもった加圧空気を使用し、メインブロー段階では、25バールないし40バールのインターバルの圧力をもった加圧空気を使用する。
【0041】
図3からわかるように、図示した実施形態では、加熱経路(24)は多数の周回する搬送要素(33)から形成され、これらの搬送要素は互いにチェーン状に配列されて転向ホイール(34)に沿って案内されている。特に、チェーン状の配置により、実質的に長方形の基本輪郭を張ることが考慮されている。図示した実施形態では、加熱経路(24)の受け渡しホイール(29)側および搬入ホイール(35)側の互いに隣接する転向部領域に2つの比較的小さなサイズの転向ホイール(36)が使用され、反対側には比較的大きなサイズの1つの転向ホイール(34)が使用されている。しかし、基本的には任意の他のガイドも考えられる。
【0042】
受け渡しホイール(29)と搬入ホイール(35)とを互いにできるだけ密に配置できるようにするには、図示した配置が特に合目的であることが明らかになった。というのは、加熱経路(24)の対応する膨張領域に3つの転向ホイール(34,36)が配置され、すなわちより小さな転向ホイール(36)が加熱経路(24)の直線部への移行領域に配置され、より大きな転向ホイール(34)が受け渡しホイール(29)および搬入ホイール(35)へ直接受け渡す領域に配置されているからである。チェーン状の搬送要素(33)を使用する代わりに、たとえば回転する加熱ホイールを使用することも可能である。
【0043】
容器(21)のブロー成形が終了した後、容器を取り出しホイール(37)によってブローステーション(3)の領域から取り出し、受け渡しホイール(28)と搬出ホイール(38)とを介して搬出経路(32)へ搬出する。
【0044】
図4に図示した加熱経路(24)の変形実施形態では、より多くの放射加熱器(30)によって、単位時間当たりより多くのパリソン(1)を温度調整することができる。ここで、ファン(31)は冷却空気を冷却空気通路(39)の領域へ誘導し、冷却空気通路(39)はそれぞれ付設の放射加熱器(30)に対向配置され、排流穴を介して冷却空気を放出する。排流方向を設定することにより、冷却空気の流動方向は実質的にパリソン(1)の搬送方向に対し横方向に実現される。冷却空気通路(39)は放射加熱器(30)に対向する表面の領域に加熱放射線用のリフレクタを有していてよく、同様に、放出された冷却空気を介して放射加熱器(30)の冷却をも実現してよい。
【0045】
図5は、容器(2)の操作に用いる担持要素(42)を備えた受け渡しホイール(41)を示している。図示した実施形態では、担持要素(42)は操作要素(43)と担持アーム(44)とから形成されている。操作要素(43)は図示の実施形態ではやっとこ状に構成されて2つのやっとこアーム(45,46)を有しており、やっとこアーム(45,46)は回転軸線(47,48)に対して相対的に回動可能であるように担持アーム(44)によって保持されている。この種の操作要素(43)は容器(2)をダイレクトに把持する。しかし操作要素(43)は、パリソン(1)または容器(2)を担持する搬送要素と接触するように実現されていてもよい。この種の搬送要素はたとえば搬送心棒(9)として実現されていてよい。
【0046】
受け渡しホイール(41)は搬出ホイール(49)と搬入ホイール(50)との間に配置されている。搬出ホイール(49)はブローモジュール(51)に付設され、搬入ホイール(50)は充填モジュール(52)に付設されている。搬入ホイール(50)は複数個の担持要素(53)を有し、搬出ホイール(49)は複数個の担持要素(54)を有している。
【0047】
担持要素(42)は、受け渡しホイール(41)の領域で、回転軸線(55)に対し相対的に回動可能であるように支持されている。担持要素(42)の回動運動は、曲線軌道(57)に沿って案内されているカムローラ(56)を使用して行われる。カムローラ(56)は、回動運動を簡単に行えるようにするために、担持アーム(44)の横アーム(58)の領域に配置されていてよい。
【0048】
図5は、受け渡しホイール(41)の領域に最大数の担持要素(42)を配置した実施形態を示している。この場合、搬出ホイール(49)と受け渡しホイール(41)と搬入ホイール(50)とが回転すると、搬出ホイール(49)の各担持要素(54)はブロー成形した容器を受け渡しホイール(41)の担持要素(42)に受け渡し、受け渡しホイール(41)の各担持要素(42)は容器を搬入ホイール(50)の担持要素(50)に受け渡す。このような作動状態は、構造的に予め設定された、ブローモジュール(51)および充填モジュール(52)双方の最大仕事量に相当している。
【0049】
図6は、受け渡しホイール(41)の領域での担持要素(42)の数量を図5のものに比べて半分にした作動状態を示している。担持要素(42)を1つおきに省略したものである。この作動状態では、搬出ホイール(49)は図5の場合と同じ回転数で回転するが、担持要素(54)は1つおきにブロー成形した容器を搬送する。曲線軌道(57)を対応的に修正することにより、担持要素(42)の回動運動は、図5の実施形態に比べて搬入ホイール(50)の回転数が半分の場合、搬入ホイール(50)の各担持要素(53)が1個の容器を積載するように、設定される。これにより、充填モジュール(52)の領域では、容器の隙間のない連続積載を保証することができる。
【特許請求の範囲】
【請求項1】
容器をブロー成形して充填する方法であって、パリソンをまず熱コンディショニングし、次にブロー成形型内部でブロー圧を作用することにより容器に成形し、ブロー成形した容器を、その搬送経路の少なくとも一部分に沿って、回転する受け渡しホイールによって保持されている担持要素によって位置決めし、前記受け渡しホイールが、容器製造用のブローモジュールと容器充填用の充填モジュールとの間の連結部の少なくとも一部を成している前記方法において、
前記受け渡しホイール(41)の領域における前記担持要素(42)の数量を生産速度に依存して変化させることを特徴とする方法。
【請求項2】
容器(2)の搬送方向において前記受け渡しホイール(41)の前方に前記ブローモジュールの搬出ホイール(49)が容器(2)用の担持要素(53)を備え、前記搬送方向において前記受け渡しホイール(41)の後方に前記充填モジュール(52)の搬入ホイール(50)が容器(2)用の担持要素(54)を備えていることを特徴とする、請求項1に記載の方法。
【請求項3】
前記受け渡しホイール(41)の回転の際に前記担持要素(42)が前記受け渡しホイール(41)に対し相対的に運動することを特徴とする、請求項1または2に記載の方法。
【請求項4】
前記担持要素(42)が前記受け渡しホイール(41)に対し相対的に回動することを特徴とする、請求項1から3までのいずれか一つに記載の方法。
【請求項5】
前記担持要素(42)が前記受け渡しホイール(41)に対し相対的に伸縮することを特徴とする、請求項1から3までのいずれか一つに記載の方法。
【請求項6】
前記担持要素(42)をカム制御部によって前記受け渡しホイール(41)に対し相対的に位置決めすることを特徴とする、請求項1から5までのいずれか一つに記載の方法。
【請求項7】
生産速度が異なる場合、前記担持要素(42)に対し異なる制御曲線を使用することを特徴とする、請求項1から6までのいずれか一つに記載の方法。
【請求項8】
生産速度が半分である場合、前記受け渡しホイール(41)の領域における前記担持要素(42)の数量を半分にすることを特徴とする、請求項1から7までのいずれか一つに記載の方法。
【請求項9】
前記担持要素(42)をサーボモータによって位置決めすることを特徴とする、請求項1から5までのいずれか一つに記載の方法。
【請求項10】
ブロー成形型を備える少なくとも1つのブローステーションと、ブロー成形される容器を搬送経路に沿って位置決めするための少なくとも1つの担持要素とを有する、容器をブロー成形して充填するための装置であって、前記担持要素が回転する受け渡しホイールによって保持され、該受け渡しホイールが、容器を製造するためのブローモジュールと容器を充填するための充填モジュールとの間の連結部の少なくとも一部分を形成している前記装置において、
前記受け渡しホイール(41)の領域における前記担持要素(42)の数量が生産速度に依存して可変であることを特徴とする装置。
【請求項11】
容器(2)の搬送方向において前記受け渡しホイール(41)の前方において前記ブローモジュール(51)の搬出ホイール(49)が容器(2)用の担持要素(53)を備え、前記搬送方向において前記受け渡しホイール(41)の後方において前記充填モジュール(52)の搬入ホイール(50)が容器(2)用の担持要素(54)を備えていることを特徴とする、請求項10に記載の装置。
【請求項12】
前記担持要素(42)が前記受け渡しホイール(41)に対し相対的に可動に配置されていることを特徴とする、請求項10または11に記載の装置。
【請求項13】
前記担持要素(42)が前記受け渡しホイール(41)に対し相対的に回動可能に配置されていることを特徴とする、請求項10から12までのいずれか一つに記載の装置。
【請求項14】
前記担持要素(42)が前記受け渡しホイール(41)に対し相対的に伸縮可能に配置されていることを特徴とする、請求項10から12までのいずれか一つに記載の装置。
【請求項15】
前記担持要素(42)が前記受け渡しホイール(41)に対し相対的にカム制御部によって位置決め可能であることを特徴とする、請求項10から14までのいずれか一つに記載の装置。
【請求項16】
異なる生産速度に適合させるために前記カム制御部の曲線軌道(57)が交換可能に前記受け渡しホイール(41)の領域に配置されていることを特徴とする、請求項10から15までのいずれか一つに記載の装置。
【請求項17】
前記受け渡しホイール(41)の領域での前記担持要素(42)の数量が半分の場合、前記担持要素(42)が1つおきに除去されていることを特徴とする、請求項10から16までのいずれか一つに記載の装置。
【請求項18】
前記担持要素を位置決めするためにサーボモータが使用されていることを特徴とする、請求項10から17までのいずれか一つに記載の装置。
【請求項1】
容器をブロー成形して充填する方法であって、パリソンをまず熱コンディショニングし、次にブロー成形型内部でブロー圧を作用することにより容器に成形し、ブロー成形した容器を、その搬送経路の少なくとも一部分に沿って、回転する受け渡しホイールによって保持されている担持要素によって位置決めし、前記受け渡しホイールが、容器製造用のブローモジュールと容器充填用の充填モジュールとの間の連結部の少なくとも一部を成している前記方法において、
前記受け渡しホイール(41)の領域における前記担持要素(42)の数量を生産速度に依存して変化させることを特徴とする方法。
【請求項2】
容器(2)の搬送方向において前記受け渡しホイール(41)の前方に前記ブローモジュールの搬出ホイール(49)が容器(2)用の担持要素(53)を備え、前記搬送方向において前記受け渡しホイール(41)の後方に前記充填モジュール(52)の搬入ホイール(50)が容器(2)用の担持要素(54)を備えていることを特徴とする、請求項1に記載の方法。
【請求項3】
前記受け渡しホイール(41)の回転の際に前記担持要素(42)が前記受け渡しホイール(41)に対し相対的に運動することを特徴とする、請求項1または2に記載の方法。
【請求項4】
前記担持要素(42)が前記受け渡しホイール(41)に対し相対的に回動することを特徴とする、請求項1から3までのいずれか一つに記載の方法。
【請求項5】
前記担持要素(42)が前記受け渡しホイール(41)に対し相対的に伸縮することを特徴とする、請求項1から3までのいずれか一つに記載の方法。
【請求項6】
前記担持要素(42)をカム制御部によって前記受け渡しホイール(41)に対し相対的に位置決めすることを特徴とする、請求項1から5までのいずれか一つに記載の方法。
【請求項7】
生産速度が異なる場合、前記担持要素(42)に対し異なる制御曲線を使用することを特徴とする、請求項1から6までのいずれか一つに記載の方法。
【請求項8】
生産速度が半分である場合、前記受け渡しホイール(41)の領域における前記担持要素(42)の数量を半分にすることを特徴とする、請求項1から7までのいずれか一つに記載の方法。
【請求項9】
前記担持要素(42)をサーボモータによって位置決めすることを特徴とする、請求項1から5までのいずれか一つに記載の方法。
【請求項10】
ブロー成形型を備える少なくとも1つのブローステーションと、ブロー成形される容器を搬送経路に沿って位置決めするための少なくとも1つの担持要素とを有する、容器をブロー成形して充填するための装置であって、前記担持要素が回転する受け渡しホイールによって保持され、該受け渡しホイールが、容器を製造するためのブローモジュールと容器を充填するための充填モジュールとの間の連結部の少なくとも一部分を形成している前記装置において、
前記受け渡しホイール(41)の領域における前記担持要素(42)の数量が生産速度に依存して可変であることを特徴とする装置。
【請求項11】
容器(2)の搬送方向において前記受け渡しホイール(41)の前方において前記ブローモジュール(51)の搬出ホイール(49)が容器(2)用の担持要素(53)を備え、前記搬送方向において前記受け渡しホイール(41)の後方において前記充填モジュール(52)の搬入ホイール(50)が容器(2)用の担持要素(54)を備えていることを特徴とする、請求項10に記載の装置。
【請求項12】
前記担持要素(42)が前記受け渡しホイール(41)に対し相対的に可動に配置されていることを特徴とする、請求項10または11に記載の装置。
【請求項13】
前記担持要素(42)が前記受け渡しホイール(41)に対し相対的に回動可能に配置されていることを特徴とする、請求項10から12までのいずれか一つに記載の装置。
【請求項14】
前記担持要素(42)が前記受け渡しホイール(41)に対し相対的に伸縮可能に配置されていることを特徴とする、請求項10から12までのいずれか一つに記載の装置。
【請求項15】
前記担持要素(42)が前記受け渡しホイール(41)に対し相対的にカム制御部によって位置決め可能であることを特徴とする、請求項10から14までのいずれか一つに記載の装置。
【請求項16】
異なる生産速度に適合させるために前記カム制御部の曲線軌道(57)が交換可能に前記受け渡しホイール(41)の領域に配置されていることを特徴とする、請求項10から15までのいずれか一つに記載の装置。
【請求項17】
前記受け渡しホイール(41)の領域での前記担持要素(42)の数量が半分の場合、前記担持要素(42)が1つおきに除去されていることを特徴とする、請求項10から16までのいずれか一つに記載の装置。
【請求項18】
前記担持要素を位置決めするためにサーボモータが使用されていることを特徴とする、請求項10から17までのいずれか一つに記載の装置。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2012−526029(P2012−526029A)
【公表日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2012−510111(P2012−510111)
【出願日】平成22年3月29日(2010.3.29)
【国際出願番号】PCT/DE2010/000388
【国際公開番号】WO2010/130236
【国際公開日】平成22年11月18日(2010.11.18)
【出願人】(509017365)カーハーエス コーポプラスト ゲーエムベーハー (15)
【Fターム(参考)】
【公表日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成22年3月29日(2010.3.29)
【国際出願番号】PCT/DE2010/000388
【国際公開番号】WO2010/130236
【国際公開日】平成22年11月18日(2010.11.18)
【出願人】(509017365)カーハーエス コーポプラスト ゲーエムベーハー (15)
【Fターム(参考)】
[ Back to top ]