
巻取ユニット、糸巻取機、及びボビン保持装置の取付方法
【課題】メンテナンス作業等のためにボビン保持装置を取り外した場合でも、ボビン保持装置を再び取り付ける際に取外し前の位置関係を容易に再現できる巻取ユニットを提供する。
【解決手段】基準プレート141は、ワインダユニットの下流側ユニットを支持する部材である機台フレームの構成部材(具体的には、第1フレームメンバ151)に対して取り付けられる。基準プレート141は、締付ボルト161を緩めたり締め付けたりすることで、第1フレームメンバ151に対して移動可能な調整状態と、第1フレームメンバ151に対して移動不能な固定状態と、を切換可能に構成している。ボビン保持装置10は、基準プレート141に対する取付け及び取外しが可能である。そして、当該ボビン保持装置10が基準プレート141に取り付けられる際は、基準プレート141に対する位置がただ1つに定まるように基準プレート141に対して固定される。
【解決手段】基準プレート141は、ワインダユニットの下流側ユニットを支持する部材である機台フレームの構成部材(具体的には、第1フレームメンバ151)に対して取り付けられる。基準プレート141は、締付ボルト161を緩めたり締め付けたりすることで、第1フレームメンバ151に対して移動可能な調整状態と、第1フレームメンバ151に対して移動不能な固定状態と、を切換可能に構成している。ボビン保持装置10は、基準プレート141に対する取付け及び取外しが可能である。そして、当該ボビン保持装置10が基準プレート141に取り付けられる際は、基準プレート141に対する位置がただ1つに定まるように基準プレート141に対して固定される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主として、給糸ボビンから糸を解舒して巻取ボビンに巻き取る巻取ユニットに関する。
【背景技術】
【0002】
従来から、巻取ユニットを多数並べて配置し、それぞれの巻取ユニットにおいて、給糸ボビンから解舒された糸を巻取ボビンに巻き取ってパッケージを形成するように構成した糸巻取機が知られている。この糸巻取機において、糸のテンションを安定させて高品質のパッケージを作る観点からは、糸が解舒される給糸ボビンを下流側の糸ガイドとの関係で正確な位置に保持することが重要である。
【0003】
この種の糸巻取機において給糸ボビンを保持するための構成として、例えば特許文献1は、給糸ボビンの芯管の内壁を保持するボビン保持装置を開示する。特許文献1のボビン保持装置は、給糸ボビンの内周を複数の爪部材(緊締クロー群)により複数の支点で支持することで、異なる芯管内径に対してもボビンと巻取装置との位置関係を変えずに巻取作業を行う構成になっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−89284号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、上記のようなボビン保持装置は、例えばメンテナンス作業を行うために巻取ユニットから取り外す必要が生じることがある。このメンテナンス作業としては、例えば、ボビン保持装置が有する可動部分に対するグリスの塗り直し等が考えられる。
【0006】
しかしながら、糸巻取機で高品質なパッケージを生産するには、上記のように、給糸ボビンを下流側の糸ガイドとの関係で正確な位置に保持することが必要になる。従って、ボビン保持装置をいったん巻取ユニットから取り外すと、再び取り付ける際にその位置を厳密に調整しなければならず、作業に時間が掛かっていた。従って、メンテナンス作業等を効率化する観点から更なる改良が望まれていた。
【0007】
この点、特許文献1では、ボビン保持装置が巻取ユニットに対してどのように取り付けられるかの開示が全くない。
【0008】
本発明は以上の事情に鑑みてされたものであり、その目的は、メンテナンス作業等のためにボビン保持装置を取り外した場合でも、ボビン保持装置を再び取り付ける際に取外し前の位置関係を容易に再現できる巻取ユニットを提供することにある。
【課題を解決するための手段及び効果】
【0009】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0010】
本発明の第1の観点によれば、以下の構成の巻取ユニットが提供される。即ち、この巻取ユニットは、ボビン保持装置と、下流側ユニットと、基準部材と、を備える。前記ボビン保持装置は、給糸ボビンを保持可能である。前記下流側ユニットは、前記給糸ボビンから解舒された糸を糸走行方向の下流へ案内してパッケージに巻き取る。前記基準部材は、前記下流側ユニットを支持する部材であるベース体に対して取り付けられる。前記基準部材は、前記ベース体に対して移動可能な状態である調整状態と、前記ベース体に対して移動不能な状態である固定状態と、を切換可能に構成している。前記ボビン保持装置は、前記基準部材に対する取付け及び取外しが可能であり、当該ボビン保持装置が前記基準部材に取り付けられる際は、前記基準部材に対する位置がただ1つに定まるように当該基準部材に対して固定される。
【0011】
これにより、基準部材をベース体に位置決めして固定した上で当該基準部材にボビン保持装置を固定するので、ボビン保持装置を取り外した場合でも、再び基準部材に取り付けるだけで、取外し前の位置関係を容易に再現できる。従って、位置の調整は最初の1回だけで良く、ボビン保持装置を取り外すごとに再調整する必要がないので、作業を大幅に効率化することができる。また、基準部材の位置決めによって、一般的に当該基準部材よりも大きく重い装置であるボビン保持装置の位置決めを実質的に実現できるので、位置決め作業自体も効率化することができる。
【0012】
前記の巻取ユニットにおいては、以下のように構成することが好ましい。即ち、前記ベース体及び前記基準部材のうち少なくとも一方には孔が設けられ、この孔にボルトを差し込むことで前記基準部材が前記ベース体に取り付けられている。前記ボルトの軸部と前記孔との間には遊びが設けられている。
【0013】
これにより、ボルトを緩めたり締め付けたりする簡単な構成で、基準部材の調整状態と固定状態とを切り換えることができる。また、ボルトの軸部の周囲に形成された遊びを利用して、基準部材の位置を調整可能な構成を簡単に実現することができる。
【0014】
前記の巻取ユニットにおいては、以下のように構成することが好ましい。即ち、前記下流側ユニットは、前記給糸ボビンからの糸の解舒を補助する解舒補助装置を備える。前記基準部材は、前記ボビン保持装置に保持される前記給糸ボビンの中心位置に対応した目印を有している。
【0015】
これにより、基準部材のベース体への取付け時に、目印と解舒補助装置との位置関係を調整することにより、後でボビン保持装置を基準部材に取り付けたときに、当該ボビン保持装置に保持される給糸ボビンの中心を解舒補助装置との関係で適切に位置させることができる。また、作業者は、ボビン保持装置そのものではなく基準部材の目印を使って位置合わせを行うことになるので、位置関係が視覚的に把握し易くなる。この結果、位置合わせ作業の効率化を実現できる。
【0016】
前記の巻取ユニットにおいては、前記目印は、前記基準部材に形成された凹部又は貫通孔であることが好ましい。
【0017】
これにより、簡単な構成で目印を得ることができるので、巻取ユニットの低コスト化を実現できる。
【0018】
前記の巻取ユニットにおいては、以下のように構成することが好ましい。即ち、前記解舒補助装置は、前記給糸ボビンの糸が解舒される解舒位置において形成されるバルーンの大きさを調整する円筒形状のバルーン規制部を備える。前記調整状態において、前記基準部材の位置は、前記バルーン規制部の軸線の延長線上に前記目印が位置するように調整される。
【0019】
これにより、ボビン保持装置を基準部材に取り付けたときに、当該ボビン保持装置に保持される給糸ボビンの中心を、バルーン規制部の軸線の延長線上に位置させることができる。この結果、給糸ボビンからの解舒時に周回位置によってバルーンの大きさが不均一になることが防止され、解舒される糸に安定したテンションを付与して高品質のパッケージを形成することができる。
【0020】
前記の巻取ユニットにおいては、以下のように構成することもできる。即ち、前記下流側ユニットは、前記給糸ボビンからの糸の解舒を補助する解舒補助装置を備える。前記基準部材は、前記ボビン保持装置に保持される前記給糸ボビンの中心位置に対応した位置に、目印となる基準冶具を取付可能である。
【0021】
これにより、基準部材のベース体への取付け時に、目印となる基準冶具と解舒補助装置との位置関係を調整することにより、後でボビン保持装置を基準部材に取り付けたときに、当該ボビン保持装置に保持される給糸ボビンの中心を解舒補助装置との関係で適切に位置させることができる。また、作業者は、ボビン保持装置そのものではなく基準治具を使って位置合わせを行うことになるので、位置関係が視覚的に把握し易くなる。この結果、位置合わせ作業の効率化を実現できる。
【0022】
前記の巻取ユニットにおいては、以下のように構成することが好ましい。即ち、前記解舒補助装置は、前記給糸ボビンの糸が解舒される解舒位置において形成されるバルーンの大きさを調整する円筒形状のバルーン規制部を備える。前記基準冶具は真っ直ぐに細長く形成される。前記調整状態において、前記基準部材の位置は、当該基準部材に前記基準冶具を取り付けた上で、当該基準冶具の中心と前記バルーン規制部の軸線とが一致するように調整される。
【0023】
これにより、ボビン保持装置を基準部材に取り付けたときに、当該ボビン保持装置に保持される給糸ボビンの中心を、バルーン規制部の軸線の延長線上に位置させることができる。この結果、給糸ボビンからの解舒時に周回位置によってバルーンの大きさが不均一になることが防止され、解舒される糸に安定したテンションを付与して高品質のパッケージを形成することができる。
【0024】
前記の巻取ユニットにおいては、前記基準部材は板状に形成されていることが好ましい。
【0025】
これにより、ボビン保持装置の位置決めのための構成を簡素化できる。
【0026】
前記の巻取ユニットにおいては、前記基準部材は、当該基準部材に前記ボビン保持装置が取り付けられるまでの間、当該ボビン保持装置の重量を一時的に支持する重量支持部を有することが好ましい。
【0027】
これにより、一般的に重量物であるボビン保持装置の重量を重量支持部で支持しながら、当該ボビン保持装置を基準部材に固定することができる。従って、ボビン保持装置の重量を作業者自身が手で支えながら固定作業を行う構成と比較して、作業者の負担を大幅に軽減し、作業効率を高めることができる。
【0028】
前記の巻取ユニットにおいては、前記ボビン保持装置は、その一端が前記基準部材に対して片持ち状に取り付けられることが好ましい。
【0029】
これにより、ボビン保持装置の基準部材への固定の際に、当該ボビン保持装置の重量が重量支持部で支持されるので、当該ボビン保持装置が落下したり傾いたりすることを防止できる。従って、作業効率を高めることができる。
【0030】
前記の巻取ユニットにおいては、前記ボビン保持装置には、供給された前記給糸ボビンの位置合わせ、当該給糸ボビンの保持、及び当該給糸ボビンの排出のうち少なくとも何れかのために動力を供給する駆動源が配置されていることが好ましい。
【0031】
これにより、ボビン保持装置が、外部の装置(例えば、下流側ユニット)から駆動力の供給を受けない構成が実現される。従って、ボビン保持装置を、駆動源を含めてユニット化して一体的に取り扱うことが容易になるので、メンテナンス作業等の効率化が実現される。
【0032】
本発明の第2の観点によれば、上記の巻取ユニットを複数並べて配置した糸巻取機が提供される。
【0033】
これにより、それぞれの巻取ユニットにおいて、ボビン保持装置の取外し/取付けの際に位置の再調整作業が不要になる。従って、ボビン保持装置のメンテナンス等が終了した後、巻取ユニットによる巻取りを早期に再開することができるので、糸巻取機の稼動効率を高めることができる。
【0034】
前記の糸巻取機においては、以下のように構成することが好ましい。即ち、前記ベース体は、複数の巻取ユニットに跨るように配置されて、それぞれの前記巻取ユニットの前記下流側ユニットを支持する。1つの前記ベース体に複数の前記巻取ユニットの前記基準部材が取り付けられる。
【0035】
これにより、糸巻取機の構成の簡素化を実現できる。
【0036】
本発明の第3の観点によれば、以下の構成のボビン保持装置の取付方法が提供される。即ち、このボビン保持装置の取付方法が適用される巻取ユニットは、ボビン保持装置と、下流側ユニットと、基準部材と、を備える。前記ボビン保持装置は、給糸ボビンを保持可能である。前記下流側ユニットは、前記給糸ボビンから解舒された糸を糸走行方向の下流へ案内してパッケージに巻き取る。前記基準部材は、前記下流側ユニットを支持する部材であるベース体に対して取り付けられる。そして、このボビン保持装置の取付方法は、第1工程と、第2工程と、第3工程と、を含む。前記第1工程は、前記基準部材を、前記ベース体に対して移動可能な状態である調整状態にした上で、当該基準部材の位置を前記下流側ユニットに対して合わせる。前記第2工程は、前記基準部材を、前記ベース体に対して移動不能な状態である固定状態に切り換える。前記第3工程は、前記基準部材に対して前記ボビン保持装置を固定する。
【0037】
これにより、基準部材をベース体に位置決めして固定した上で当該基準部材にボビン保持装置を固定するので、ボビン保持装置を取り外した場合でも、再び基準部材に取り付けるだけで、取外し前の位置関係を容易に再現できる。従って、位置の調整(第1工程及び第2工程)は最初の1回だけで良く、ボビン保持装置を取り外すごとに再調整する必要がないので、作業を大幅に効率化することができる。また、基準部材の位置決めによって、一般的に当該基準部材よりも大きく重い装置であるボビン保持装置の位置決めを実質的に実現できるので、位置決め作業自体も効率化することができる。
【図面の簡単な説明】
【0038】
【図1】本発明の一実施形態に係る自動ワインダの全体的な構成を示す外観斜視図。
【図2】ワインダユニットの模式的な側面図。
【図3】ワインダユニットの主要な構成を示すブロック図。
【図4】解舒補助装置の構成を示す拡大斜視図。
【図5】ボビン保持装置の構成を示す斜視図。
【図6】動力伝達部が備えるカムの形状を示す側面図。
【図7】主芯部材が受取姿勢にあるときの動力伝達部の様子を示す側面図。
【図8】主芯部材が解舒姿勢にあるときの動力伝達部の様子を示す側面図。
【図9】主芯部材が排出姿勢にあるときの動力伝達部の様子を示す側面図。
【図10】糸切れ等が発生したときにワインダユニットが行う処理を示すフローチャート。
【図11】給糸ボビンの解舒側端部の位置が調整される様子の前半部を示す側面図。
【図12】給糸ボビンの解舒側端部の位置が調整される様子の後半部を示す側面図。
【図13】給糸ボビンの解舒側端部の位置を調整する処理を示すフローチャート。
【図14】機台フレームに基準プレートを取り付ける様子を示す斜視図。
【図15】基準プレートを解舒補助装置に対して位置合わせする様子を示す側面図。
【図16】基準プレートにボビン保持装置を固定する様子を示す斜視図。
【図17】基準プレートに基準治具を取り付けて位置合わせする場合を示す側面図。
【発明を実施するための形態】
【0039】
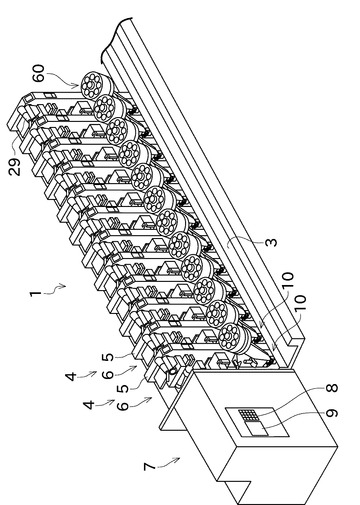
次に、図面を参照して本発明の実施の形態を説明する。初めに、本実施形態の自動ワインダ1の概要について図1を参照して説明する。図1は、本発明の一実施形態に係る自動ワインダ1の外観斜視図である。なお、以下の説明において、ワインダユニット4の正面側を単に「正面側」、ワインダユニット4の背面側を単に「背面側」と称することがある。また、ワインダユニット4における糸巻取時での糸の走行方向における上流及び下流を、単に「上流」及び「下流」と称することがある。
【0040】
本実施形態の自動ワインダ(糸巻取機)1は、並べて配置された複数のワインダユニット(巻取ユニット)4と、複数のワインダユニット4の並べられた方向の一端に配置された機台制御装置7と、を備えている。
【0041】
各ワインダユニット4は、下部に配置された上流側ユニットとしてのボビン保持装置10と、上部に配置された下流側ユニット6と、を備えている。下流側ユニット6は、正面視で左右一側に設けられたユニットフレーム5を備えている。ユニットフレーム5の内部には、ボビン保持装置10及び下流側ユニット6の各部を制御するユニット制御部50(図3を参照)が配置されている。
【0042】
ユニットフレーム5は、ボビン保持装置10及び下流側ユニット6の設定等を入力可能なユニット入力部18と、巻取作業の状況等を表示可能なユニット表示部19と、を備えている。このユニット入力部18は、例えばキーやボタンとして構成することができる。
【0043】
機台制御装置7はこのユニット制御部50と通信可能に構成されているため、機台制御装置7によって複数のワインダユニット4の動作を集中的に管理することが可能となっている。また、機台制御装置7は、各ワインダユニット4に対して様々な設定(各ワインダユニット4の巻取作業に用いられる給糸ボビンの種類の入力等)を行うための機台入力部8と、各ワインダユニット4の巻取作業の状況等を表示可能な機台表示部9と、を備えている。
【0044】
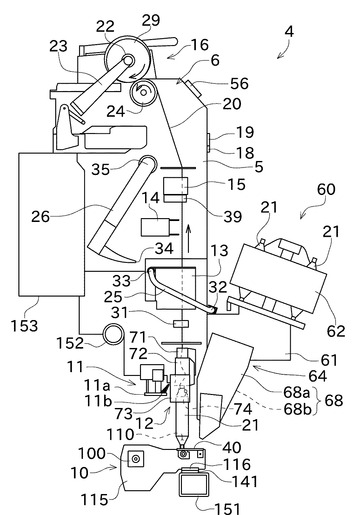
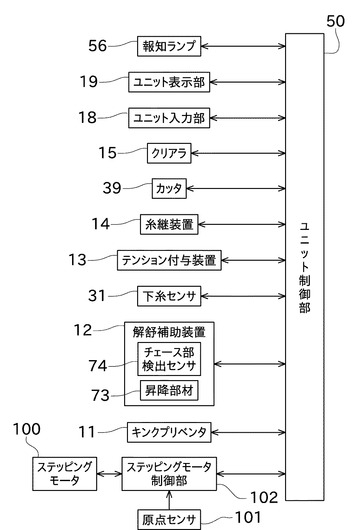
次に、図2及び図3を参照して、ワインダユニット4について詳細に説明する。図2は、ワインダユニット4の模式的な側面図である。図3は、ワインダユニット4の主要な構成を示すブロック図である。ワインダユニット4は、給糸ボビン21の糸20を巻取ボビン22に巻き取ってパッケージ29を形成するための装置である。以下、このワインダユニット4の各部について説明する。
【0045】
図1及び図2に示すように、下流側ユニット6は、ワインダユニット4の正面側に配置された、オペレータが給糸ボビン21を供給するためのボビン供給装置60を備える。ボビン供給装置60は、ワインダユニット4の下部から正面上方向に延出されたマガジン保持部61と、このマガジン保持部61の先端に取り付けられているマガジンカン62と、マガジンカン62の下方に設置された給糸ボビン案内部64と、開閉部68と、を備えている。
【0046】
マガジンカン62には複数の収納孔が円状に並べて形成されており、それぞれの収納孔には、給糸ボビン21を傾斜姿勢でセットすることができる。また、このマガジンカン62は、図略のモータによって間欠的な回転送り駆動が可能であるように構成されている。そして、このマガジンカン62の間欠駆動と、マガジンカン62が備える図略の制御弁の開閉動作とによって、所定の給糸ボビン21を斜め下方へ落下させることができる。
【0047】
給糸ボビン案内部64は、マガジンカン62から落下してきた給糸ボビン21を斜めに滑落させて、ボビン保持装置10のボビン保持部110まで案内するように構成されている。
【0048】
ボビン保持装置10はハウジング115を備えている。このハウジング115には、図5に示すように、ボビン保持部110と、糸20の解舒が完了した給糸ボビン21(芯管21a)を排出するための跳ね板40と、が支持されている。また、ボビン保持装置10は、ボビン保持部110及び跳ね板40を動作させる駆動部200を備える。なお、ボビン保持装置10の詳細は後述する。
【0049】
ボビン供給装置60の開閉部68は、正面側(図2における手前側)と背面側(図2における奥側)との間で揺動可能な1対の開閉部材68a,68bで構成されており、1対の開閉部材68a,68bが、閉じた状態(図2で示す状態)と開いた状態とを切換可能になっている。開閉部68が閉じた状態においては、当該開閉部68の内面は給糸ボビン案内部64の一部分を構成する。つまり、開閉部68の内面は、マガジンカン62から落下してくる給糸ボビン21と接触して、当該給糸ボビン21を斜め下方のボビン保持装置10まで案内する。一方、開閉部68が開いた状態においては、巻取りが完了して糸20が巻かれていない状態になった給糸ボビン21を正面側に排出することができる。なお、開閉部68の正面側にはコンベア3(図1を参照)が配設されているので、自動ワインダ1は、開閉部68から排出された給糸ボビン21を、コンベア3によって、コンベア3の搬送方向端部に配置された図示しない給糸ボビン回収ボックスまで搬送することができる。
【0050】
また、ボビン保持部110は、図2及び図3に示すステッピングモータ(モータ)100が駆動することによって、正面側及び背面側に揺動可能に構成されている。なお、このステッピングモータ100は、図3に示すステッピングモータ制御部(制御部)102によって制御されている。また、ボビン保持装置10の適宜の位置には原点センサ101が取り付けられており、この原点センサ101が検出したステッピングモータ100の回転状態を基準として、当該ステッピングモータ100の回転制御が行われる。なお、この原点センサ101を取り付ける場所及び部材については後述する。
【0051】
また、ボビン保持部110は、背面側から正面側へ揺動することにより、給糸ボビン案内部64によって案内される給糸ボビン21を受取可能となっている。そして、ボビン保持部110は、背面側に揺動することにより、受け取った給糸ボビン21を略直立状態にすることができる。なお、ステッピングモータ100の駆動によってボビン保持部110を揺動させる機構、及びステッピングモータ制御部102が行う制御等の詳細は後述する。
【0052】
上記のようにボビン保持装置10のボビン保持部110にセットされた給糸ボビン21は、下流側ユニット6が備える巻取部16によって巻き取られる。この巻取部16は、図2に示すように、巻取ボビン22を装着可能に構成されたクレードル23と、糸20をトラバースさせるとともに前記巻取ボビン22を駆動するための綾振ドラム24と、を備えている。
【0053】
また、前記下流側ユニット6は、ボビン保持装置10と綾振ドラム24との間の糸走行経路中に、ユニットフレーム5により支持された各種の装置を備えている。具体的に説明すると、前記糸走行経路に配置される主要な装置として、ボビン保持装置10側から綾振ドラム24側へ向かって順に、糸縮れ発生防止装置11と、解舒補助装置12と、テンション付与装置13と、糸継装置14と、クリアラ(糸品質測定器)15と、が配置されている。
【0054】
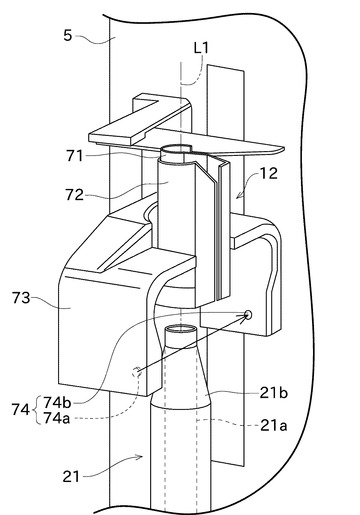
解舒補助装置12は、図4に示すように、固定部材71と、可動部材(バルーン規制部)72と、昇降部材73と、チェース部検出センサ74と、を備える。図4は、解舒補助装置12の構成を示した拡大斜視図である。
【0055】
固定部材71は、適宜の部材を介してユニットフレーム5に固定されている。この固定部材71の下部には、バルーンを制御するための絞り部(図略)が形成されている。可動部材72は、筒状に形成されており、固定部材71の外側を覆うように配置されている。なお、以下の説明において、この筒状に構成された可動部材72の中心軸線及び当該中心軸線を延長した線を仮想線L1と称する。
【0056】
昇降部材73はこの可動部材72と一体的に形成されている。そして、昇降部材73は鉛直方向に移動可能に構成されているため、当該可動部材72を鉛直方向に移動させることができる。この昇降部材73は、給糸ボビン21のチェース部21b(図4を参照)を検出するためのチェース部検出センサ74を備えている。なお、チェース部21bとは、巻取動作の進行に伴う給糸ボビン21の糸層端部である。また、チェース部検出センサ74は、投光部74aと受光部74bとを有する透過式のフォトセンサとして構成されている。図3に示すように、チェース部検出センサ74が検出した検出信号はユニット制御部50に入力される。
【0057】
この構成により、チェース部検出センサ74の検出信号に基づいて昇降部材73を動作させることで、チェース部21bから所定の距離に可動部材72を位置させることができる。そして、給糸ボビン21が解舒されてチェース部21bの位置が下降するに従って昇降部材73を下降させることで、チェース部21bと可動部材72との距離を常に一定にすることができる。これにより、給糸ボビン21が解舒される際にチェース部21bから糸20が解離する位置で発生するバルーンを適切に規制することができ、給糸ボビン21から解舒された糸20の張力を一定に保ちながら巻取作業を行うことができる。
【0058】
ここで、解舒補助装置12が上記のような解舒補助作業を適切に行うためには、給糸ボビン21の解舒側端部を仮想線L1上の位置(解舒基準位置)に良好に一致させる必要がある。仮に給糸ボビン21の解舒側端部が解舒基準位置からズレていると、給糸ボビン21から糸20を解舒する際に、糸20の周回位置によってバルーンの大きさが変化し、これによって張力のムラが生じてしまうからである。この点、本実施形態では、給糸ボビン21の解舒側端部の位置を調整する制御、及び、ボビン保持装置10自体の厳密な位置決めにより、上記の要求を満たし、給糸ボビン21からの糸20の良好な解舒を実現している。なお、これらの詳細については後述する。
【0059】
解舒補助装置12の背面側には、糸20の縮れの発生を防止するための糸縮れ発生防止装置11が配置されている。ここで糸縮れとは、糸に生じる不具合の1つであり、糸が縮れ、螺旋状に絡み合っている状態である。前記糸縮れ発生防止装置11は、ブラシアーム11aと、ブラシアーム11aの先端に形成されたブラシ部11bと、を備えている。このブラシアーム11aは回動可能に構成されており、回動させることで、ブラシ部11bを給糸ボビン21の上端部分に接触させることができる。これにより、糸継作業時等において糸20に適切なテンションを付与し、糸縮れの発生を防止することができる。
【0060】
テンション付与装置13は、走行する糸20に所定のテンションを付与するものである。本実施形態のテンション付与装置13は、固定の櫛歯に対して可動の櫛歯を配置するゲート式に構成されている。可動側の櫛歯は、櫛歯同士が噛合せ状態又は解放状態になるように、ロータリ式のソレノイドにより回動可能に構成されている。
【0061】
解舒補助装置12とテンション付与装置13との間には下糸検出センサ31が配置されている。下糸検出センサ31は、配置される位置において糸20が走行しているか否かを検出可能に構成されている。
【0062】
クリアラ15は、糸20の糸太さを監視することにより、スラブ等の糸欠陥(糸欠点)を検出するように構成されている。また、クリアラ15よりも糸道の上流側(下方)には、当該クリアラ15が糸欠陥を検出したときに直ちに糸20を切断するためのカッタ39が配置されている。
【0063】
糸継装置14は、クリアラ15が糸欠陥を検出してカッタ39で糸20を切断する糸切断時、給糸ボビン21からの解舒中の糸20の糸切れ時、又は給糸ボビン21の交換時等に、給糸ボビン21側の下糸と、パッケージ29側の上糸とを糸継ぎするものである。このような糸継装置14としては、圧縮空気等の流体を用いるものや、機械式のものを使用することができる。
【0064】
糸継装置14の下側及び上側には、給糸ボビン21側の下糸を捕捉して案内する下糸案内パイプ25と、パッケージ29側の上糸を捕捉して案内する上糸案内パイプ26と、が設けられている。下糸案内パイプ25の先端には吸引口32が形成され、上糸案内パイプ26の先端にはサクションマウス34が備えられている。下糸案内パイプ25及び上糸案内パイプ26には適宜の負圧源がそれぞれ接続されており、前記吸引口32及びサクションマウス34に吸引力を生じさせることができる。
【0065】
この構成で、給糸ボビンの交換時等においては、下糸案内パイプ25の吸引口32が下方へ回動して下糸を吸引捕捉し、その後、軸33を中心にして上方へ回動することで糸継装置14まで下糸を案内する。また、これとほぼ同時に、ワインダユニット4は、上糸案内パイプ26を図2の位置から軸35を中心として上方へ回動させるとともにパッケージ29を逆回転させ、当該パッケージ29から解舒される上糸をサクションマウス34によって捕捉する。続いて、ワインダユニット4は、軸35を中心として上糸案内パイプ26を下方へ回動させることで、糸継装置14に上糸を案内するようになっている。そして、糸継装置14において、下糸と上糸の糸継ぎが行われる。
【0066】
また、ユニットフレーム5には、図2及び図3に示すように報知ランプ56が配置されている。この報知ランプ56は、図3に示すようにユニット制御部50と接続されており、下流側ユニット6の各部に発生した異常をオペレータに知らせることができる。なお、この報知ランプ56は、光を用いてオペレータに異常の発生を知らせる構成であるが、この構成に代えて、ブザー等によって報知する構成にしても良い。
【0067】
以上の構成で、自動ワインダ1の各ワインダユニット4は、給糸ボビン21から解舒された糸20を巻取ボビン22に巻き取って所定長のパッケージ29を形成することができる。
【0068】
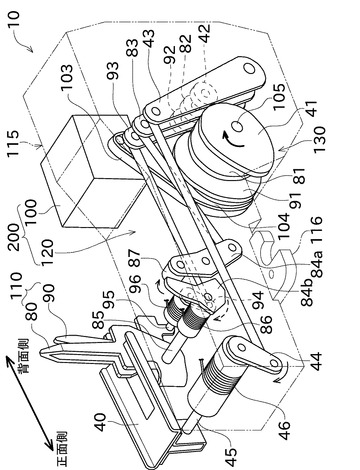
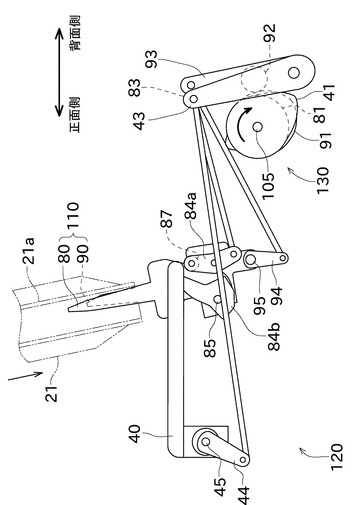
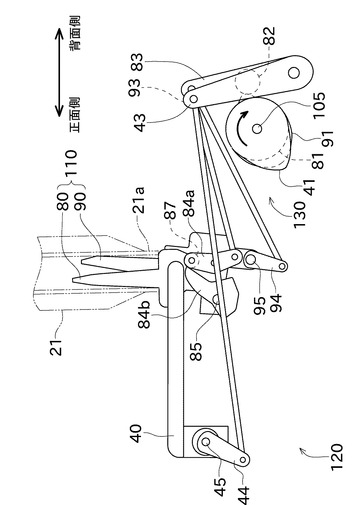
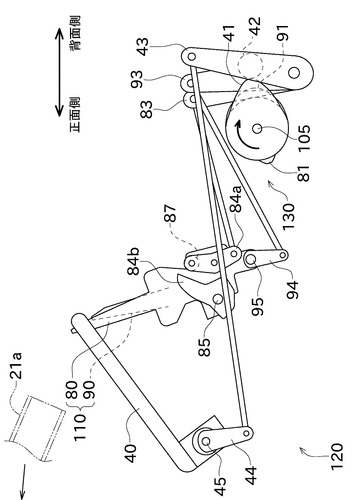
次に、図5から図9までを参照して、ボビン保持装置10について詳細に説明する。図5は、ボビン保持装置10の構成を示す斜視図である。図6は、動力伝達部120が備えるカムの形状を示す側面図である。図7は、主芯部材80が受取姿勢にあるときの動力伝達部120の様子を示す側面図である。図8は、主芯部材80が解舒姿勢にあるときの動力伝達部120の様子を示す側面図である。図9は、主芯部材80が排出姿勢にあるときの動力伝達部120の様子を示す側面図である。
【0069】
前述のように、ボビン保持装置10は、供給された給糸ボビン21を保持するためのボビン保持部110と、糸20の解舒が完了した給糸ボビン21(芯管21a)を排出するための跳ね板40と、ボビン保持部110及び跳ね板40を動作させる駆動部200と、を備えている。また、駆動部200は、ステッピングモータ(駆動源)100と、このステッピングモータ100の動力を跳ね板40及びボビン保持部110に伝達する動力伝達部120と、で構成されている。
【0070】
ボビン保持装置10は中空状のハウジング115を有しており、このハウジング115に、ボビン保持部110と、跳ね板40と、ステッピングモータ100と、が取り付けられている。また、ハウジング115の内部には、前記の動力伝達部120が収容されている。
【0071】
ボビン保持部110は、図7から図9に示すように揺動して、給糸ボビン21の解舒側端部の位置を変更させることができる。また、ボビン保持部110は、主芯部材(規定部材)80と、補助芯部材(固定部材)90と、で構成されている。この主芯部材80及び補助芯部材90は、図7に示すように、給糸ボビン21が供給されたときには閉じた状態となっており、芯管21aの内部に入り込むようになっている。そして、この状態から補助芯部材90が主芯部材80から離れる方向に揺動することで、主芯部材80及び補助芯部材90が開いた状態となって、給糸ボビン21を保持することができる(図8を参照)。また、このボビン保持部110による給糸ボビン21の保持が解除された状態で、跳ね板40を揺動させることにより、芯管21aの底部を押し出して主芯部材80及び補助芯部材90から抜き、給糸ボビン21を排出することができる(図9を参照)。
【0072】
次に、動力伝達部120について説明する。動力伝達部120は、主芯部材80を揺動させるための構成として、主芯部材駆動カム81と、ベアリング82と、揺動アーム83と、位置決めアーム84aと、接触アーム84bと、伝達軸85と、押当てバネ86と、を備えている。また、動力伝達部120は、ステッピングモータ100の動力を主芯部材駆動カム81等に伝えるための構成として、伝達ベルト103と、プーリ104と、カム軸105と、を備えている。
【0073】
プーリ104はカム軸105に固定されており、このプーリ104は、ステッピングモータ100の出力軸に対し伝達ベルト103を介して連結されている。伝達ベルト103は図5では簡略的に描かれているが、歯付きのタイミングベルトとして構成されており、ステッピングモータ100の出力軸の回転を滑りなくカム軸105に伝達することができる。
【0074】
前記プーリ104には原点センサ101(図5には示していない)が取り付けられており、この原点センサ101は、プーリ104ないしカム軸105が所定の回転位相であるときに検知信号を送るように構成されている。そして、この原点センサ101が検知信号を送信するときの回転状態がステッピングモータ100の原点とされており、ステッピングモータ100の回転制御はこの原点を基準として行われるようになっている。
【0075】
主芯部材駆動カム81は前記カム軸105に固定されており、当該カム軸105と一体的に回転する。また、主芯部材駆動カム81よりも背面側には揺動アーム83が配置されており、この揺動アーム83の中途部には回転可能なベアリング82が取り付けられている。このベアリング82は、主芯部材駆動カム81の外周面に接触しながら適宜回転できるように構成されている。
【0076】
揺動アーム83の先端部は、動力伝達部120の適宜の位置に揺動可能に支持された位置決めアーム84aの下端部に、棒状のリンクを介して連結されている。位置決めアーム84aの上端部には回転可能な回転部材87が支持されている。
【0077】
位置決めアーム84aよりも正面側には、接触アーム84bが配置されている。この接触アーム84bの先端は、前記位置決めアーム84aに取り付けられた前記回転部材87に対して接触可能に構成されている。接触アーム84bの基部には伝達軸85の一端が固定されており、伝達軸85の他端は主芯部材80に固定されている。つまり、伝達軸85と主芯部材80とは連動するように構成されている。従って、主芯部材80は接触アーム84bと一体的に回転するようになっている。また、前記接触アーム84bには捩りコイルバネ状の押当てバネ86が取り付けられており、接触アーム84bを図5の矢印方向に付勢している。
【0078】
以上の構成で、接触アーム84bには押当てバネ86の弾性力が作用するため、その突出部が回転部材87に接触し、位置決めアーム84aを押す。更に、位置決めアーム84aの下端部がリンクを介して揺動アーム83を引っ張るので、揺動アーム83のベアリング82が主芯部材駆動カム81に押し当てられる。このように、押当てバネ86は、主芯部材駆動カム81とベアリング82とを接触させるとともに、接触アーム84bを位置決めアーム84aに接触させるためのバネ力を発生させている。
【0079】
この状態で主芯部材駆動カム81が回転し、主芯部材駆動カム81の周縁部(後述の膨らみ部)がベアリング82を押すと、揺動アーム83がカム軸105から離れる方向に回動し、当該揺動アーム83の先端がリンクを介して位置決めアーム84aの下端部を引っ張る。その結果、位置決めアーム84aの上端の回転部材87が接触アーム84bを押すので、主芯部材80を接触アーム84bとともに正面側へ揺動させることができる(図8を参照)。
【0080】
また、動力伝達部120は、ステッピングモータ100の動力を補助芯部材90に伝えるための構成として、補助芯部材駆動カム91と、ベアリング92と、揺動アーム93と、伝達アーム94と、伝達軸95と、保持バネ96と、を備えている。
【0081】
補助芯部材駆動カム91は、主芯部材駆動カム81と同様に、前記カム軸105に固定されている。補助芯部材駆動カム91よりも背面側には揺動アーム93が配置されており、この揺動アーム93の中途部には回転可能なベアリング92が取り付けられている。このベアリング92は、補助芯部材駆動カム91の外周面に接触しながら適宜回転できるように構成されている。
【0082】
揺動アーム93の先端部は、動力伝達部120の適宜の位置に揺動可能に支持された伝達アーム94の下端部に、棒状のリンクを介して連結されている。伝達アーム94の基部には伝達軸95の一端が取り付けられており、伝達軸95の他端は補助芯部材90に固定されている。つまり、伝達軸95と補助芯部材90とは連動するように構成されている。従って、補助芯部材90は伝達アーム94と一体的に回転するようになっている。また、前記伝達アーム94には捩りコイルバネ状の保持バネ96が取り付けられており、伝達アーム94を図5の点線矢印方向に付勢している。
【0083】
以上の構成で、保持バネ96は、補助芯部材90が背面側に揺動する方向(主芯部材80から離れる方向)のバネ力を、伝達アーム94及び伝達軸95を介して当該補助芯部材90に作用させている。同時に、保持バネ96の弾性力が作用する伝達アーム94の先端部がリンクを介して揺動アーム93を引っ張るので、揺動アーム93のベアリング92が補助芯部材駆動カム91に押し当てられる。このように、保持バネ96は、補助芯部材駆動カム91とベアリング92とを接触させるためのバネ力を発生させている。
【0084】
この状態で補助芯部材駆動カム91が回転し、補助芯部材駆動カム91の周縁部(後述の膨らみ部)がベアリング92を押すと、揺動アーム93がカム軸105から離れる方向に揺動し、当該揺動アーム93の先端がリンクを介して伝達アーム94の下端部を引っ張る。その結果、補助芯部材90を正面側(主芯部材80に近づく方向)に揺動させることができる。
【0085】
なお、所定の角度を超えて補助芯部材90を正面側に揺動させた場合、当該補助芯部材90が主芯部材80の図略の部分と接触し、それ以後は補助芯部材90が主芯部材80を押すようにして一体的に揺動するように構成されている(この場合、接触アーム84bの先端部と回転部材87とが適宜離間することになる)。即ち、補助芯部材90が所定の角度を超えて正面側に揺動している状態では、主芯部材80は主芯部材駆動カム81ではなく補助芯部材駆動カム91によって駆動されることになる。
【0086】
次に、跳ね板40を駆動するための構成について説明する。動力伝達部120は、ステッピングモータ100の動力を跳ね板40に伝えるための構成として、跳ね板駆動カム41と、ベアリング42と、揺動アーム43と、伝動アーム44と、伝達軸45と、戻しバネ46と、を備えている。
【0087】
跳ね板駆動カム41は、補助芯部材駆動カム91及び主芯部材駆動カム81と同様に、前記カム軸105に固定されている。跳ね板駆動カム41よりも背面側には揺動アーム43が配置されており、この揺動アーム43の中途部には回転可能なベアリング42が取り付けられている。このベアリング42は、跳ね板駆動カム41の外周面に接触しながら適宜回転できるように構成されている。
【0088】
揺動アーム43の先端部は、動力伝達部120の適宜の位置に揺動可能に支持された伝動アーム44の下端部に、棒状のリンクを介して連結されている。伝動アーム44の基部には伝達軸45の一端が固定されており、伝達軸45の他端は跳ね板40に固定されている。つまり、伝達軸45と跳ね板40とは連動するように構成されている。従って、跳ね板40は伝動アーム44と一体的に回転するようになっている。また、前記伝動アーム44には捩りコイルバネ状の戻しバネ46が取り付けられており、伝動アーム44を図5の矢印方向に付勢している。
【0089】
以上の構成で、戻しバネ46の弾性力が作用する伝動アーム44の先端部が、リンクを介して揺動アーム43を引っ張るので、揺動アーム43のベアリング42が跳ね板駆動カム41に押し当てられる。このように、戻しバネ46は、跳ね板駆動カム41とベアリング42とを接触させるためのバネ力を発生させている。
【0090】
この状態で跳ね板駆動カム41が回転し、跳ね板駆動カム41の周縁部(後述の膨らみ部)がベアリング42を押すと、揺動アーム43がカム軸105から離れる方向に移動し、当該揺動アーム43の先端がリンクを介して伝動アーム44の下端部を引っ張る。その結果、跳ね板40を正面側へ跳ね上げることができる(図9を参照)。
【0091】
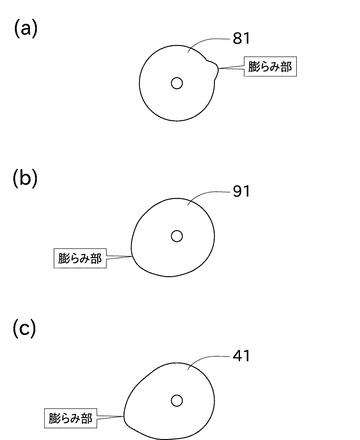
次に、ワインダユニット4が、給糸ボビン21の受取り、給糸ボビン21の糸20が解舒される所定の位置での保持、及び排出を行う構成について説明する。前述のように、本実施形態において跳ね板駆動カム41、主芯部材駆動カム81及び補助芯部材駆動カム91は、共通のカム軸105に固定されたカム連結機構130として構成されており、3つのカム41,81,91が一体的に駆動するようになっている。また、図6に示すように、3つのカム41,81,91にはそれぞれ膨らみ部が形成されており、この膨らみによって跳ね板40、主芯部材80、補助芯部材90の姿勢を変更させることができる。補助芯部材駆動カム91の膨らみ部及び跳ね板駆動カム41の膨らみ部は緩やかに形成されているが、主芯部材駆動カム81の膨らみ部はやや鋭く形成されている。また、補助芯部材駆動カム91の膨らみ部と跳ね板駆動カム41の膨らみ部とはほぼ同じ位相で形成される一方、それらとほぼ180°異なる位相において主芯部材駆動カム81の膨らみ部が形成されている。
【0092】
以上の構成において、給糸ボビン21の受取りを行うときは、ステッピングモータ100を適宜駆動して3つのカム41,81,91を回転させ、揺動アーム93が有するベアリング92が、補助芯部材駆動カム91において膨らみ部のピーク部分を若干通り過ぎた箇所に接触した状態とし、この状態でカム41,81,91の回転を停止させる。これにより、図7に示すように、補助芯部材90は、直立状態から正面側に若干倒れた姿勢となる。
【0093】
この状態においては、補助芯部材90が所定の角度を超えて揺動しているため、前述のように主芯部材80も補助芯部材90に押される形で正面側に揺動しており、その姿勢は、補助芯部材90と同様に、直立状態から正面側に若干倒れている。そして、この状態で給糸ボビン21がマガジン保持部61から供給されると、ボビン保持部110(主芯部材80及び補助芯部材90)が芯管21aの内部に入り込む。なお、本明細書において、給糸ボビン21の受取りを行うときの主芯部材80の姿勢(図7の姿勢)を受取姿勢と称する。
【0094】
そして、受け取った給糸ボビン21について糸20の解舒を行うときは、ステッピングモータ100を再び駆動し、カム軸105を図7の矢印で示す方向に回転させる。これにより、揺動アーム43,93が有するベアリング42,92が、跳ね板駆動カム41及び補助芯部材駆動カム91において膨らみ部を完全に通り過ぎ、非膨らみ部に接触するようになる。また、揺動アーム83が有するベアリング82は、主芯部材駆動カム81において膨らみ部に接触するようになる。
【0095】
これに伴って、図8に示すように、跳ね板40は図7の状態から背面側に揺動して水平となるとともに、補助芯部材90が背面側へ若干倒れるように揺動する。また、前述したように補助芯部材90によって正面側に押されていた主芯部材80も、補助芯部材90の背面側への揺動に伴って同様に背面側に揺動していくが、やがて接触アーム84bが位置決めアーム84aの回転部材87に接触することで主芯部材80の揺動が止められ、以後は補助芯部材90のみが、保持バネ96のバネ力によって背面側へ揺動することになる。即ち、補助芯部材90が主芯部材80から相対的に離れるように変位するため、給糸ボビン21の芯管21aをボビン保持部110によって内側から保持することができる。
【0096】
このときの主芯部材80の揺動が止められる姿勢は、位置決めアーム84aが有する回転部材87の位置によって定まる。また、この位置決めアーム84aはリンクを介して揺動アーム83に連結されているので、主芯部材80の姿勢は、前記揺動アーム83のベアリング82が前記主芯部材駆動カム81の膨らみ部におけるどの部分に接触しているか(膨らみ部の立ち上がり部分に接触しているのか、ピーク部分に接触しているのか等)によって変更することができる。即ち、主芯部材駆動カム81の回転位相を変更することで、主芯部材80の姿勢を調整することができるのである。なお、このように主芯部材80の姿勢が変更される場合でも、補助芯部材90は保持バネ96の弾性力によって、給糸ボビン21の保持状態を問題なく維持することができる。
【0097】
なお、本明細書において、給糸ボビン21の解舒を行うときの主芯部材80の姿勢を解舒姿勢と称する。また、前記原点センサ101は、図8のように主芯部材80がほぼ直立した姿勢となっている状態でのプーリ104の回転位相を検出することとし、この状態がステッピングモータ100の回転制御における原点となるように設定されている。なお、主芯部材80の解舒姿勢は給糸ボビン21の種類等によって変化するものであるので、原点センサ101が検出する原点と前記解舒姿勢とは必ずしも一致しない。
【0098】
次に、給糸ボビン21の排出を行うときは、ステッピングモータ100を適宜駆動して3つのカム41,81,91を回転させる。これにより、揺動アーム43,93が有するベアリング42,92が、跳ね板駆動カム41及び補助芯部材駆動カム91の膨らみ部に接触する。従って、図9に示すように、跳ね板40は正面側に大きく揺動する。また、これと連動して、補助芯部材90が正面側に揺動することで給糸ボビン21の保持が解除されるとともに、当該補助芯部材90が主芯部材80を押しながら正面側に大きく揺動する。これにより、跳ね板40が給糸ボビン21の芯管21aの下端を押し上げて、当該給糸ボビン21を排出することができる。なお、本明細書において、給糸ボビン21の排出を行うときの主芯部材80の姿勢を排出姿勢と称する。
【0099】
以上のように、本実施形態では、単一の駆動源であるステッピングモータ100を駆動するだけで、給糸ボビン21の受取り、解舒姿勢での給糸ボビン21の保持(及び当該解舒姿勢の調整)、及び給糸ボビン21の排出を行うことができる。
【0100】
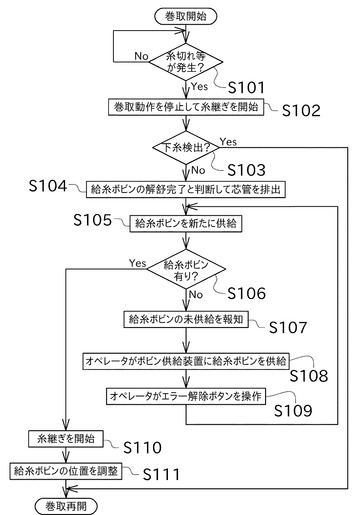
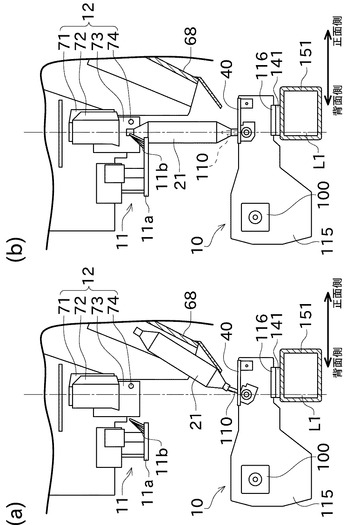
次に、図10から図12までを参照して、自動ワインダ1が給糸ボビン21を交換しつつ巻取りを行うときの一連の流れについて説明する。図10は、糸切れ等が発生したときにワインダユニット4が行う処理を示すフローチャートである。図11は、給糸ボビン21の解舒側端部の位置が調整される様子の前半部を示す側面図である。図12は、給糸ボビン21の解舒側端部の位置が調整される様子の後半部を示す側面図である。
【0101】
ワインダユニット4による巻取動作中において、クリアラ15が糸欠陥を検出してカッタ39で糸20を切断したり、給糸ボビン21からの解舒中の糸20の糸切れが発生したり、給糸ボビン21の糸20を解舒し終わって糸20が無くなったりすることがある。ワインダユニット4はこの糸切れ等を監視しており(S101)、糸切れ等が発生したときには、巻取動作を停止させる(S102)。
【0102】
そして、巻取動作が停止すると、下方に位置している下糸案内パイプ25の吸引口32による下糸の吸引捕捉と、上糸案内パイプ26による上糸の吸引捕捉と、が行われ、糸継装置14での糸継ぎが開始される(S102)。その後、ユニット制御部50は、下糸検出センサ31の検出結果に基づいて、糸継ぎ後に下糸があるか否かを判断している(S103)。
【0103】
カッタ39による糸20の切断又は解舒中の糸20の糸切れが発生していた場合は、給糸ボビン21に糸20が残っており、機械的なミス等が起こらなければ糸継ぎが完了する。従って、下糸検出センサ31によって下糸が検出される。この場合、ユニット制御部50は、ボビン保持装置10及び下流側ユニット6の各構成を制御して糸20の巻取りを再開させる。
【0104】
一方、給糸ボビン21の糸20を全て解舒し終わって糸20が無くなった場合は、糸継ぎができないので、下糸検出センサ31によって下糸が検出されない。このとき、ユニット制御部50は、給糸ボビン21の糸20の解舒が完了したと判断し、ボビン保持部110及び跳ね板40を動作させて芯管21aの排出処理を行わせる(S104)。その後、ユニット制御部50は、ボビン供給装置60に給糸ボビン21の供給を新たに行わせる(S105)。このとき、ステッピングモータ制御部102はステッピングモータ100を駆動させ、主芯部材80を受取姿勢まで予め移動させておく。
【0105】
新たに供給された給糸ボビン21は、図11(a)に示すように、ボビン保持装置10に案内される。そして、ステッピングモータ制御部102は、ボビン保持部110を背面側へ揺動する。
【0106】
なお、本実施形態のワインダユニット4は、ボビン保持部110を背面側に揺動させるときに、給糸ボビン21がチェース部検出センサ74の検出範囲を横切るように、ボビン保持部110のレイアウト等が考慮されている。そして、ユニット制御部50は、このチェース部検出センサ74の検出結果に基づいて、給糸ボビン21が新たに供給されたか否かを判断している(S106)。具体的には、ユニット制御部50が給糸ボビン21の供給を新たに行うように指示した後にチェース部検出センサ74によって給糸ボビン21が検出された場合は、給糸ボビン21が新たに供給されたと判断される。一方、所定時間以内にチェース部検出センサ74によって給糸ボビン21が検出されなかった場合は、給糸ボビン21が新たに供給されていないと判断される。
【0107】
給糸ボビン21が新たに供給されたと判断した場合、ユニット制御部50は、新しく供給された給糸ボビン21の糸端とパッケージ29側の糸端とを捕捉させて、糸継装置14による糸継ぎを開始させる(S110)。
【0108】
給糸ボビン21が新たに供給されていないと判断した場合、ユニット制御部50は、糸継作業を開始することなく、報知ランプ56に対して適宜の信号を送る。この信号を受信した報知ランプ56は、予め設定された表示色等を用いて、給糸ボビン21が新たに供給されていない旨をオペレータに通知する(S107)。
【0109】
そして、本実施形態のユニット制御部50は、給糸ボビン21が新たに供給されていないと判断して報知ランプ56に適宜の信号を送ってから、この不具合が解消されるまで、下糸の捕捉動作、上糸の捕捉動作、及び糸継ぎを行わないように構成されている。また、オペレータは、報知ランプ56の通知によってボビン供給装置60に給糸ボビン21が供給されていない旨を知ることができる。そして、オペレータが、ボビン供給装置60に給糸ボビン21を供給して(S108)、エラー解除ボタンを操作(S109)することにより、報知ランプ56の通知を止めることができる。その後、ユニット制御部50の指示により、ボビン供給装置60が給糸ボビン21の供給を新たに行う(S105)。
【0110】
ユニット制御部50は、給糸ボビン21が供給されたか否かを上記と同様に再び判断する(S106)。給糸ボビン21が供給されたと判断した場合、ユニット制御部50は、新しく供給された給糸ボビン21の糸端とパッケージ29側の糸端とを捕捉させて、糸継ぎを開始させる(S110)。
【0111】
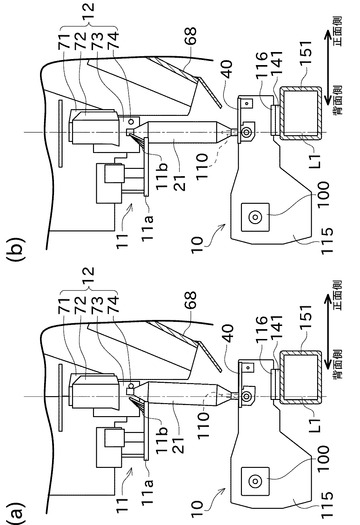
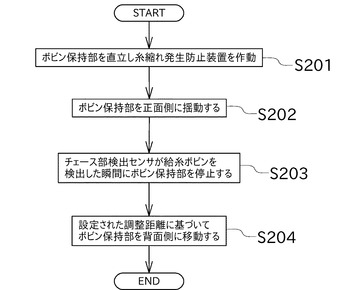
続いて、ユニット制御部50は、糸継ぎと並行して給糸ボビン21の解舒側端部の位置の調整を行う(S111)。以下、この給糸ボビン21の解舒側端部の位置を調整する制御について、図11から図13を参照して説明する。図13は、給糸ボビン21の解舒側端部の位置を調整する処理を示すフローチャートである。
【0112】
本実施形態のワインダユニット4は、解舒補助装置12が備えるチェース部検出センサ74を給糸ボビン21が横切るようにボビン保持部110を実際に揺動させた上で、チェース部検出センサ74が給糸ボビン21を検知するタイミングに基づいて、当該給糸ボビン21の位置を調整している。これにより、本実施形態のワインダユニット4は、給糸ボビン21の解舒側端部を解舒基準位置に精度良く位置決めできる構成となっている。また、本実施形態のワインダユニット4は、解舒補助装置12の可動部材72が移動することで給糸ボビン21に被さる構成となっているが、上記のように給糸ボビン21の解舒側端部を正確に位置決めすることで、可動部材72と給糸ボビン21との接触を確実に防止することができる。
【0113】
以下、具体的に説明する。即ち、ステッピングモータ制御部102は、ステッピングモータ100を制御することにより、受取姿勢にある主芯部材80を背面側に回動して給糸ボビン21を一度直立させる。このときユニット制御部50は、図11(b)に示すように、糸縮れ発生防止装置11のブラシ部11bを給糸ボビン21の上端部分に接触させて、糸20に適切なテンションを付与し、糸縮れの発生を防止させる(S201)。その後、ステッピングモータ制御部102は、給糸ボビン21を再び正面側へ若干倒すようにボビン保持部110を揺動させる(S202)。そして、ユニット制御部50は、チェース部検出センサ74によって給糸ボビン21が検出されたときにボビン保持部110の揺動を停止させる(S203,図12(a))。
【0114】
ユニット制御部50は記憶部としてのメモリを備えており、このメモリは、チェース部検出センサ74によって給糸ボビン21が検出され始めた位置から何パルス分だけステッピングモータ100を駆動させれば給糸ボビン21を適切な位置にできるか(調整距離)を、用いる給糸ボビン21の種類等と対応付けて記憶している。また、オペレータは、巻取作業を始める前に、用いる給糸ボビン21の種類をユニット入力部18に入力している。これにより、ユニット制御部50には、現在の巻取作業において用いるべき調整距離が設定されている。そして、ユニット制御部50は、この設定された調整距離に基づいて、ステッピングモータ100に所定のパルス数を出力して、ボビン保持部110を背面側に揺動する(S204,図12(b))。
【0115】
これにより、給糸ボビン21の解舒側端部を解舒基準位置に合わせることができる。従って、解舒補助装置12の機能を適正に発揮させつつ、可動部材72と給糸ボビン21との接触を防止することができる。
【0116】
なお、用いる給糸ボビン21の種類が変更された場合は、ユニット入力部18に適宜の入力を行うことにより、適切な調整距離をユニット制御部50に設定することができる。また、この入力は、ユニット入力部18に行うことに代えて、機台入力部8に行うこともできる。この場合、機台制御装置7は、機台入力部8に入力された内容を各ワインダユニット4に送信する。これにより、各ワインダユニット4のユニット制御部50に対して、一括して適切な調整距離を設定することができる。
【0117】
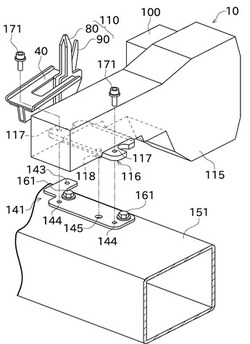
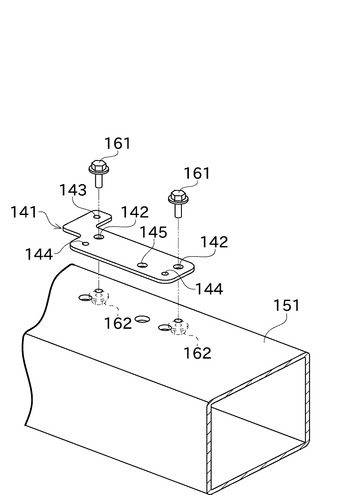
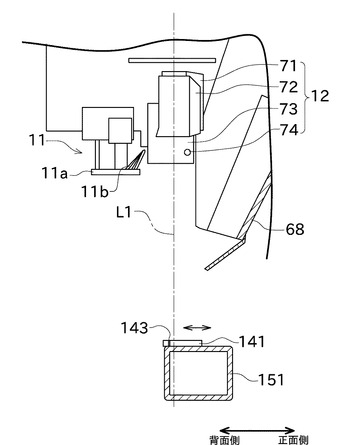
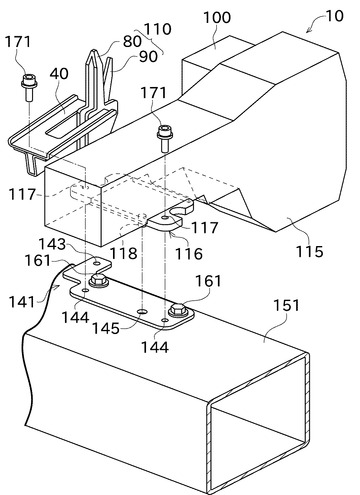
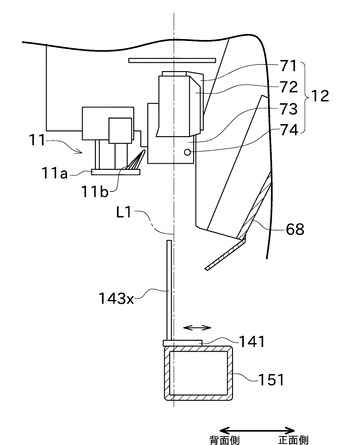
次に、上記したボビン保持装置10の自動ワインダ1に対する組付けについて、図14から図17を中心に参照して説明する。図14は、機台フレームの第1フレームメンバ151に基準プレート141を取り付ける様子を示す斜視図である。図15は、基準プレート141を解舒補助装置12に対して位置合わせする様子を示す側面図である。図16は、基準プレート141にボビン保持装置10を固定する様子を示す斜視図である。図17は、基準プレート141に基準治具143xを取り付けて位置合わせする場合を示す側面図である。
【0118】
前述のとおり、ワインダユニット4はボビン保持装置10と下流側ユニット6とを備えているが、これらは共通の機台フレーム(ベース体)によって支持されている。具体的には、自動ワインダ1は、ワインダユニット4が並べられる方向に細長い機台フレームを備え、この機台フレームは、図2に示すように、第1フレームメンバ151と、第2フレームメンバ152と、第3フレームメンバ153と、を備えている。これらのフレームメンバ151〜153は、図示しない連結メンバによって互いに連結されている。
【0119】
第1フレームメンバ151は角パイプ状に構成されて、機台の下部に配置される。第2フレームメンバ152は丸パイプ状に構成されて、第1フレームメンバ151より上方の高さに配置される。第3フレームメンバ153は断面矩形状に構成されて、第2フレームメンバ152よりやや上方に配置される。
【0120】
以上の機台フレームの構成で、図2に示すように、ボビン保持装置10は第1フレームメンバ151に固定される。一方、下流側ユニット6は、第2フレームメンバ152及び第3フレームメンバ153に固定される。このように、ボビン保持装置10と下流側ユニット6とは互いに分離されており、機台フレームに対して別々に取り付けられるので、ボビン保持装置10の取付位置を下流側ユニット6とは無関係に調整することができる。
【0121】
そして、ボビン保持装置10は第1フレームメンバ151に直接取り付けられるのではなく、板状の部材である基準プレート(基準部材)141を介在させるようにして取り付けられる。図14には、基準プレート141を第1フレームメンバ151に取り付ける様子が示されている。
【0122】
基準プレート141は、所定の厚みを有する平面視略L字状のプレートとして形成されている。この基準プレート141には、調整孔(孔)142と、位置確認孔(目印、貫通孔)143と、ボビン保持装置固定孔144と、引掛け孔(重量支持部)145と、が形成されている。
【0123】
調整孔142は、貫通状に形成された円形孔であり、適宜の間隔をあけて2つ設けられている。この調整孔142には、基準プレート141を第1フレームメンバ151に取り付けるための固定具である締付ボルト(ボルト)161の軸部を差し込むことができる。この締付ボルト161を、第1フレームメンバ151側に固定されたナット162にねじ込むことで、基準プレート141を第1フレームメンバ151に取り付けることができる。
【0124】
調整孔142の径は締付ボルト161の軸部の径よりもある程度大きく設定されており、こうして形成される遊びにより、締付ボルト161を緩めたときには基準プレート141はある程度の範囲で変位することができる。
【0125】
位置確認孔143は、基準プレート141に形成された貫通孔として形成されている。この位置確認孔143は、当該基準プレート141にボビン保持装置10を取り付けたときに、当該ボビン保持装置10が有するボビン保持部110の軸に対応する位置に形成されている。
【0126】
ボビン保持装置固定孔144は、貫通状に形成されたネジ孔であり、適宜の間隔をあけて2つ設けられている。このボビン保持装置固定孔144には、図16に示す固定ネジ171を用いて、ボビン保持装置10を基準プレート141に固定することができる。
【0127】
引掛け孔145は、図14に示すように、貫通状に形成された円形孔として構成されている。この引掛け孔145には、図16に示すボビン保持装置10が備える差込突起118を差し込むことができるように構成されている。
【0128】
なお、図14に示すように、第1フレームメンバ151には、上記した締付ボルト161の軸部を通過させるための貫通孔が形成されているほか、ボビン保持装置固定孔144及び引掛け孔145に対応する部位にも貫通孔が形成されている。ボビン保持装置固定孔144及び引掛け孔145に対応する貫通孔は、後述のように基準プレート141を変位させた場合でもボビン保持装置固定孔144及び引掛け孔145を塞ぐことのないように、若干大きく形成されている。
【0129】
この構成で、ボビン保持装置10を自動ワインダ1に組み付ける場合は、作業者は、図14に示すようにして基準プレート141を第1フレームメンバ151に取り付ける。ただし、このとき作業者は、締付ボルト161を完全には締め付けずに、ある程度緩めた状態としておく。すると、基準プレート141は、調整孔142と締付ボルト161の軸部との間に形成されている遊びの分に相当するストロークの範囲内で、第1フレームメンバ151上を移動することができる(調整状態)。
【0130】
作業者は、この状態で、位置確認孔143を上から確認しながら、前記解舒補助装置12が有する可動部材72の軸線の延長線(前記仮想線L1)上に当該位置確認孔143が位置するように、基準プレート141の位置を動かして調整する(図15を参照)。なお、図15には基準プレート141を背面側又は正面側に移動させて調整する様子が矢印で示されているが、上記の調整孔142の遊びは全周にわたって設けられているため、調整の方向は任意である。従って、基準プレート141を上記と垂直な方向(即ち、ワインダユニット4が並べられる方向、第1フレームメンバ151の長手方向に沿う方向)に移動させて調整することも可能になっている。作業者は、上記の位置合わせが完了した後、締付ボルト161を強く締め付けて、基準プレート141を移動不能に固定する(固定状態)。
【0131】
次に、作業者は、上記のように位置決めされた基準プレート141に対して、図16に示すようにボビン保持装置10を固定する。このボビン保持装置10が備えるハウジング115は、第1フレームメンバ151と垂直な向きに細長く形成されており、その部分の端部に近い位置において、所定の厚みを有する取付プレート116がハウジング115の下面に固定されている。
【0132】
この取付プレート116には、貫通状の取付孔117が2つ形成されている。この取付孔117は、ハウジング115の両側に配置されるとともに、基準プレート141に形成されたボビン保持装置固定孔144と対応する位置に配置されている。また、取付プレート116の下面には、下向きに突出する円柱状の差込突起118が備えられている。
【0133】
上記の構成で、まず作業者は、基準プレート141に形成された引掛け孔145に対し、ボビン保持装置10の下面の差込突起118を差し込むようにして、ボビン保持装置10を基準プレート141上に載せる。なお、これによりボビン保持装置10は一端を片持ち支持される形になるが、差込突起118と引掛け孔145の間には僅かの隙間しか形成されないように寸法が設定されているため、差込突起118が引掛け孔145に引っ掛かるような形となって、ボビン保持装置10が落下しないように支持することができる。ここで、上記のボビン保持装置10はハウジング115、ステッピングモータ100やカム連結機構130等を有しており、全体として相当に大きな重量となっているが、本実施形態の構成によれば、ボビン保持装置10の重量を支持させた状態で取付作業ができるため、作業者の負担を大幅に軽減することができる。
【0134】
次に、作業者は、それぞれの取付孔117に固定ネジ171を差し込み、ボビン保持装置固定孔144にねじ込む。ここで、固定ネジ171と取付孔117及びボビン保持装置固定孔144との間には、ガタ等が生じないように厳格な公差が設定されている。従って、2つの固定ネジ171を締め付けることにより、基準プレート141に対するボビン保持装置10の位置がただ1つに定まるように、ボビン保持装置10を基準プレート141に固定することができる。
【0135】
以上によりボビン保持装置10の設置が完了し、巻取作業が可能な状態になるが、上述したように、基準プレート141が有する位置確認孔143は、ボビン保持装置10のボビン保持部110の軸に対応する位置に配置されている。従って、解舒補助装置12の可動部材72の軸線に位置確認孔143を合わせて基準プレート141を固定し、その上で当該基準プレート141にボビン保持装置10を固定することで、ボビン保持部110の軸が解舒補助装置12の可動部材72の軸線に一致することになる。従って、上述した給糸ボビン21の解舒側端部の位置制御ともあいまって、解舒補助装置12による解舒補助作業を適切に行わせることができる。
【0136】
ところで、上述したグリスの塗り直しが必要になる等、何らかの事情により、自動ワインダ1からボビン保持装置10を取り外してメンテナンス作業を行う必要が生じる場合がある。この場合、作業者は、固定ネジ171だけを外して(締付ボルト161は外さず)、基準プレート141を第1フレームメンバ151側に残した状態でボビン保持装置10を取り外せば良い。ボビン保持装置10のメンテナンスが完了した後は、ボビン保持装置10を基準プレート141に取り付けるだけで、ボビン保持装置10を適切に位置決めした状態を再現できる。従って、直ぐに巻取作業を再開することができる。
【0137】
次に、図17を参照して、基準プレート141の位置を調整する作業の変形例を説明する。なお、図17の変形例において、前述の実施形態と同一又は類似の部材には図面に同一の符号を付し、説明を省略する場合がある。
【0138】
図17の例では、作業者は、基準プレート141の位置確認孔143に対して着脱可能な基準治具143xを用意して、当該基準治具143xを位置確認孔143に差し込んで立てた状態で位置合わせ作業を行う。これにより、位置合わせの基準(軸)が視覚的に明確になるので、より厳密な位置決めを実現することができる。位置合わせの完了後、基準治具143xは、ボビン保持装置10の取付けの邪魔にならないように基準プレート141から取り外される。
【0139】
以上に説明したように、本実施形態のワインダユニット4は、ボビン保持装置10と、下流側ユニット6と、基準プレート141と、を備える。ボビン保持装置10は、給糸ボビン21を保持可能である。下流側ユニット6は、給糸ボビン21から解舒された糸20を糸走行方向の下流へ案内してパッケージ29に巻き取る。基準プレート141は、下流側ユニット6を支持する部材である機台フレーム(具体的には、当該機台フレームを構成する第1フレームメンバ151)に対して取り付けられる。基準プレート141は、締付ボルト161を緩めたり締め付けたりすることで、第1フレームメンバ151に対して移動可能な状態である調整状態と、第1フレームメンバ151に対して移動不能な状態である固定状態と、を切換可能に構成している。ボビン保持装置10は、基準プレート141に対する取付け及び取外しが可能である。そして、当該ボビン保持装置10が基準プレート141に取り付けられる際は、基準プレート141に対する位置がただ1つに定まるように基準プレート141に対して固定される。
【0140】
これにより、基準プレート141を第1フレームメンバ151に位置決めして固定した上で当該基準プレート141にボビン保持装置10を固定するので、ボビン保持装置10を取り外した場合でも、再び基準プレート141に取り付けることで、取外し前の位置関係を容易に再現できる。従って、位置の調整は最初の1回だけで良く、ボビン保持装置10を取り外すごとに再調整する必要がないので、作業を大幅に効率化することができる。また、基準プレート141の位置決めによって、一般的に当該基準プレート141よりも大きく重い装置であるボビン保持装置10の位置決めを実質的に実現できるので、位置決め作業自体も効率化することができる。
【0141】
また、本実施形態のワインダユニット4においては、基準プレート141には調整孔142が設けられ、この調整孔142に締付ボルト161を差し込むことで基準プレート141が第1フレームメンバ151に取り付けられている。締付ボルト161の軸部と調整孔142との間には遊びが設けられている。
【0142】
これにより、締付ボルト161を緩めたり締め付けたりする簡単な構成で、基準プレート141の調整状態と固定状態とを切り換えることができる。また、締付ボルト161の軸部の周囲に形成された遊びを利用して、基準プレート141の位置を調整可能な構成を簡単に実現することができる。
【0143】
また、本実施形態のワインダユニット4においては、下流側ユニット6は、給糸ボビン21からの糸20の解舒を補助する解舒補助装置12を備える。基準プレート141は、ボビン保持装置10に保持される給糸ボビン21の中心位置に対応した目印としての位置確認孔143を有している。
【0144】
これにより、基準プレート141の第1フレームメンバ151への取付け時に、目印と解舒補助装置12との位置関係を調整することにより、後でボビン保持装置10を基準プレート141に取り付けたときに、当該ボビン保持装置10に保持される給糸ボビン21の中心を解舒補助装置12との関係で適切に位置させることができる。また、作業者は、ボビン保持装置10そのものではなく基準プレート141の目印を使って位置合わせを行うことになるので、位置関係が視覚的に把握し易くなる。この結果、位置合わせ作業の効率化を実現できる。
【0145】
また、本実施形態のワインダユニット4においては、基準プレート141に形成された貫通孔としての位置確認孔143が、上記の目印として用いられている。
【0146】
これにより、簡単な構成で目印を得ることができるので、ワインダユニット4の低コスト化を実現できる。
【0147】
また、本実施形態のワインダユニット4において、解舒補助装置12は、給糸ボビン21の糸20が解舒される解舒位置において形成されるバルーンの大きさを調整する円筒形状の可動部材72を備える。そして、締付ボルト161を緩めた状態(上記の調整状態)において、基準プレート141の位置は、前記可動部材72の軸線の延長線上に位置確認孔143が位置するように調整される。
【0148】
これにより、ボビン保持装置10を基準プレート141に取り付けたときに、当該ボビン保持装置10に保持される給糸ボビン21の中心を、可動部材72の軸線の延長線上に位置させることができる。この結果、給糸ボビン21からの解舒時に周回位置によってバルーンの大きさが不均一になることが防止され、給糸ボビン21から解舒される糸20に安定したテンションを付与して高品質のパッケージ29を形成することができる。
【0149】
また、図17の変形例の構成では、基準プレート141は、ボビン保持装置10に保持される給糸ボビン21の中心位置に対応した位置に、目印となる基準治具143xを取り付けることができる。
【0150】
これにより、基準プレート141の第1フレームメンバ151への取付け時に、目印となる基準治具143xと解舒補助装置12との位置関係を調整することにより、後でボビン保持装置10を基準プレート141に取り付けたときに、当該ボビン保持装置10に保持される給糸ボビン21の中心を解舒補助装置との関係で適切に位置させることができる。また、作業者は、ボビン保持装置10そのものではなく基準治具143xを使って位置合わせを行うことになるので、位置関係が視覚的に把握し易くなる。この結果、位置合わせ作業の効率化を実現できる。
【0151】
また、上記の変形例の構成では、締付ボルト161を緩めた状態(上記の調整状態)において、基準プレート141の位置は、当該基準治具143xの中心と前記可動部材72の軸線とが一致するように調整される。
【0152】
これにより、ボビン保持装置10を基準プレート141に取り付けたときに、当該ボビン保持装置10に保持される給糸ボビン21の中心を、可動部材72の軸線の延長線上に位置させることができる。この結果、給糸ボビン21からの解舒時に周回位置によってバルーンの大きさが不均一になることが防止され、解舒される糸20に安定したテンションを付与して高品質のパッケージ29を形成することができる。
【0153】
また、本実施形態のワインダユニット4において、基準プレート141は板状に形成された部材である。
【0154】
これにより、ボビン保持装置10の位置決めのための構成を簡素化できる。
【0155】
また、本実施形態のワインダユニット4において、基準プレート141は、当該基準プレート141にボビン保持装置10が固定されるまでの間、ボビン保持装置10の重量を一時的に支持する引掛け孔145を有する。
【0156】
これにより、ボビン保持装置10の大きな重量を引掛け孔145部で支持しながら、当該ボビン保持装置10を基準プレート141に固定することができる。従って、ボビン保持装置10の重量を作業者自身が手で支えながら固定作業を行う構成と比較して、作業者の負担を大幅に軽減し、作業効率を高めることができる。
【0157】
また、本実施形態のワインダユニット4において、ボビン保持装置10は、その一端側が基準プレート141に対して片持ち状に取り付けられる。
【0158】
これにより、ボビン保持装置10の基準プレート141への固定の際に、当該ボビン保持装置10の重量が引掛け孔145で支持されるので、当該ボビン保持装置が落下したり傾いたりすることを防止できる。従って、作業効率を高めることができる。
【0159】
また、本実施形態のワインダユニット4において、ボビン保持装置10にはステッピングモータ100が配置されている。このステッピングモータ100は、供給された給糸ボビン21の位置合わせ(解舒姿勢の調整)、給糸ボビン21の保持、及び給糸ボビン21の排出を行うための駆動力を供給する。
【0160】
これにより、ボビン保持装置10が、外部の装置(例えば、下流側ユニット6)から駆動力の供給を受けない構成が実現される。従って、ボビン保持装置10を、駆動源を含めてユニット化して一体的に取り扱うことが容易になるので、メンテナンス作業等の効率化が実現される。
【0161】
また、本実施形態の自動ワインダ1は、上記の構成のワインダユニット4を複数並べて配置した構成になっている。
【0162】
これにより、それぞれのワインダユニット4において、ボビン保持装置10の取外し/取付けの際に位置の再調整作業が不要になる。従って、ボビン保持装置10のメンテナンス等が終了した後、ワインダユニット4による巻取りを早期に再開することができるので、自動ワインダ1の稼動効率を高めることができる。
【0163】
また、本実施形態の自動ワインダ1において、基準プレート141が取り付けられる機台フレームは、複数のワインダユニット4に跨るように配置される。そして、1つの機台フレーム(第1フレームメンバ151)に、複数のワインダユニット4の基準プレート141が取り付けられる。
【0164】
これにより、自動ワインダ1の構成の簡素化を実現できる。
【0165】
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
【0166】
プレート状に形成された基準プレート141に代えて、例えばブロック状の部材を第1フレームメンバ151に取り付けて用いることができる。
【0167】
遊びを有する調整孔142は、基準プレート141ではなく、第1フレームメンバ151側に形成しても良い。
【0168】
基準プレート141に付けられる目印としては、位置確認孔143のように貫通孔とすることに限らず、例えば、基準プレート141の上面に開口する凹部としたり、上面から突出する凸部としたり、上面に刻印された目盛りや十字マーク等としたりすることができる。
【0169】
基準プレート141に引掛け孔145を形成する代わりに、当該基準プレート141に差込突起を設け、ボビン保持装置10のハウジング115側に凹部あるいは貫通孔を設けるように変更することができる。
【0170】
ボビン保持装置10の構成は、上記実施形態で示すものに限らず、適宜変更することができる。例えば、ステッピングモータ100は、供給された給糸ボビン21の位置合わせ(解舒姿勢の調整)、給糸ボビン21の保持、及び給糸ボビン21の排出の全てではなく、一部についてのみ動力を供給する構成であっても良い。
【符号の説明】
【0171】
1 自動ワインダ(糸巻取機)
4 ワインダユニット(巻取ユニット)
6 下流側ユニット
10 ボビン保持装置
12 解舒補助装置
20 糸
21 給糸ボビン
29 パッケージ
72 可動部材(バルーン規制部)
100 ステッピングモータ(駆動源)
141 基準プレート(基準部材)
142 調整孔(孔)
143 位置確認孔(目印、貫通孔)
143x 基準治具
145 引掛け孔(重量支持部)
151 第1フレームメンバ(ベース体を構成する部材)
161 締付ボルト(ボルト)
【技術分野】
【0001】
本発明は、主として、給糸ボビンから糸を解舒して巻取ボビンに巻き取る巻取ユニットに関する。
【背景技術】
【0002】
従来から、巻取ユニットを多数並べて配置し、それぞれの巻取ユニットにおいて、給糸ボビンから解舒された糸を巻取ボビンに巻き取ってパッケージを形成するように構成した糸巻取機が知られている。この糸巻取機において、糸のテンションを安定させて高品質のパッケージを作る観点からは、糸が解舒される給糸ボビンを下流側の糸ガイドとの関係で正確な位置に保持することが重要である。
【0003】
この種の糸巻取機において給糸ボビンを保持するための構成として、例えば特許文献1は、給糸ボビンの芯管の内壁を保持するボビン保持装置を開示する。特許文献1のボビン保持装置は、給糸ボビンの内周を複数の爪部材(緊締クロー群)により複数の支点で支持することで、異なる芯管内径に対してもボビンと巻取装置との位置関係を変えずに巻取作業を行う構成になっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−89284号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、上記のようなボビン保持装置は、例えばメンテナンス作業を行うために巻取ユニットから取り外す必要が生じることがある。このメンテナンス作業としては、例えば、ボビン保持装置が有する可動部分に対するグリスの塗り直し等が考えられる。
【0006】
しかしながら、糸巻取機で高品質なパッケージを生産するには、上記のように、給糸ボビンを下流側の糸ガイドとの関係で正確な位置に保持することが必要になる。従って、ボビン保持装置をいったん巻取ユニットから取り外すと、再び取り付ける際にその位置を厳密に調整しなければならず、作業に時間が掛かっていた。従って、メンテナンス作業等を効率化する観点から更なる改良が望まれていた。
【0007】
この点、特許文献1では、ボビン保持装置が巻取ユニットに対してどのように取り付けられるかの開示が全くない。
【0008】
本発明は以上の事情に鑑みてされたものであり、その目的は、メンテナンス作業等のためにボビン保持装置を取り外した場合でも、ボビン保持装置を再び取り付ける際に取外し前の位置関係を容易に再現できる巻取ユニットを提供することにある。
【課題を解決するための手段及び効果】
【0009】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0010】
本発明の第1の観点によれば、以下の構成の巻取ユニットが提供される。即ち、この巻取ユニットは、ボビン保持装置と、下流側ユニットと、基準部材と、を備える。前記ボビン保持装置は、給糸ボビンを保持可能である。前記下流側ユニットは、前記給糸ボビンから解舒された糸を糸走行方向の下流へ案内してパッケージに巻き取る。前記基準部材は、前記下流側ユニットを支持する部材であるベース体に対して取り付けられる。前記基準部材は、前記ベース体に対して移動可能な状態である調整状態と、前記ベース体に対して移動不能な状態である固定状態と、を切換可能に構成している。前記ボビン保持装置は、前記基準部材に対する取付け及び取外しが可能であり、当該ボビン保持装置が前記基準部材に取り付けられる際は、前記基準部材に対する位置がただ1つに定まるように当該基準部材に対して固定される。
【0011】
これにより、基準部材をベース体に位置決めして固定した上で当該基準部材にボビン保持装置を固定するので、ボビン保持装置を取り外した場合でも、再び基準部材に取り付けるだけで、取外し前の位置関係を容易に再現できる。従って、位置の調整は最初の1回だけで良く、ボビン保持装置を取り外すごとに再調整する必要がないので、作業を大幅に効率化することができる。また、基準部材の位置決めによって、一般的に当該基準部材よりも大きく重い装置であるボビン保持装置の位置決めを実質的に実現できるので、位置決め作業自体も効率化することができる。
【0012】
前記の巻取ユニットにおいては、以下のように構成することが好ましい。即ち、前記ベース体及び前記基準部材のうち少なくとも一方には孔が設けられ、この孔にボルトを差し込むことで前記基準部材が前記ベース体に取り付けられている。前記ボルトの軸部と前記孔との間には遊びが設けられている。
【0013】
これにより、ボルトを緩めたり締め付けたりする簡単な構成で、基準部材の調整状態と固定状態とを切り換えることができる。また、ボルトの軸部の周囲に形成された遊びを利用して、基準部材の位置を調整可能な構成を簡単に実現することができる。
【0014】
前記の巻取ユニットにおいては、以下のように構成することが好ましい。即ち、前記下流側ユニットは、前記給糸ボビンからの糸の解舒を補助する解舒補助装置を備える。前記基準部材は、前記ボビン保持装置に保持される前記給糸ボビンの中心位置に対応した目印を有している。
【0015】
これにより、基準部材のベース体への取付け時に、目印と解舒補助装置との位置関係を調整することにより、後でボビン保持装置を基準部材に取り付けたときに、当該ボビン保持装置に保持される給糸ボビンの中心を解舒補助装置との関係で適切に位置させることができる。また、作業者は、ボビン保持装置そのものではなく基準部材の目印を使って位置合わせを行うことになるので、位置関係が視覚的に把握し易くなる。この結果、位置合わせ作業の効率化を実現できる。
【0016】
前記の巻取ユニットにおいては、前記目印は、前記基準部材に形成された凹部又は貫通孔であることが好ましい。
【0017】
これにより、簡単な構成で目印を得ることができるので、巻取ユニットの低コスト化を実現できる。
【0018】
前記の巻取ユニットにおいては、以下のように構成することが好ましい。即ち、前記解舒補助装置は、前記給糸ボビンの糸が解舒される解舒位置において形成されるバルーンの大きさを調整する円筒形状のバルーン規制部を備える。前記調整状態において、前記基準部材の位置は、前記バルーン規制部の軸線の延長線上に前記目印が位置するように調整される。
【0019】
これにより、ボビン保持装置を基準部材に取り付けたときに、当該ボビン保持装置に保持される給糸ボビンの中心を、バルーン規制部の軸線の延長線上に位置させることができる。この結果、給糸ボビンからの解舒時に周回位置によってバルーンの大きさが不均一になることが防止され、解舒される糸に安定したテンションを付与して高品質のパッケージを形成することができる。
【0020】
前記の巻取ユニットにおいては、以下のように構成することもできる。即ち、前記下流側ユニットは、前記給糸ボビンからの糸の解舒を補助する解舒補助装置を備える。前記基準部材は、前記ボビン保持装置に保持される前記給糸ボビンの中心位置に対応した位置に、目印となる基準冶具を取付可能である。
【0021】
これにより、基準部材のベース体への取付け時に、目印となる基準冶具と解舒補助装置との位置関係を調整することにより、後でボビン保持装置を基準部材に取り付けたときに、当該ボビン保持装置に保持される給糸ボビンの中心を解舒補助装置との関係で適切に位置させることができる。また、作業者は、ボビン保持装置そのものではなく基準治具を使って位置合わせを行うことになるので、位置関係が視覚的に把握し易くなる。この結果、位置合わせ作業の効率化を実現できる。
【0022】
前記の巻取ユニットにおいては、以下のように構成することが好ましい。即ち、前記解舒補助装置は、前記給糸ボビンの糸が解舒される解舒位置において形成されるバルーンの大きさを調整する円筒形状のバルーン規制部を備える。前記基準冶具は真っ直ぐに細長く形成される。前記調整状態において、前記基準部材の位置は、当該基準部材に前記基準冶具を取り付けた上で、当該基準冶具の中心と前記バルーン規制部の軸線とが一致するように調整される。
【0023】
これにより、ボビン保持装置を基準部材に取り付けたときに、当該ボビン保持装置に保持される給糸ボビンの中心を、バルーン規制部の軸線の延長線上に位置させることができる。この結果、給糸ボビンからの解舒時に周回位置によってバルーンの大きさが不均一になることが防止され、解舒される糸に安定したテンションを付与して高品質のパッケージを形成することができる。
【0024】
前記の巻取ユニットにおいては、前記基準部材は板状に形成されていることが好ましい。
【0025】
これにより、ボビン保持装置の位置決めのための構成を簡素化できる。
【0026】
前記の巻取ユニットにおいては、前記基準部材は、当該基準部材に前記ボビン保持装置が取り付けられるまでの間、当該ボビン保持装置の重量を一時的に支持する重量支持部を有することが好ましい。
【0027】
これにより、一般的に重量物であるボビン保持装置の重量を重量支持部で支持しながら、当該ボビン保持装置を基準部材に固定することができる。従って、ボビン保持装置の重量を作業者自身が手で支えながら固定作業を行う構成と比較して、作業者の負担を大幅に軽減し、作業効率を高めることができる。
【0028】
前記の巻取ユニットにおいては、前記ボビン保持装置は、その一端が前記基準部材に対して片持ち状に取り付けられることが好ましい。
【0029】
これにより、ボビン保持装置の基準部材への固定の際に、当該ボビン保持装置の重量が重量支持部で支持されるので、当該ボビン保持装置が落下したり傾いたりすることを防止できる。従って、作業効率を高めることができる。
【0030】
前記の巻取ユニットにおいては、前記ボビン保持装置には、供給された前記給糸ボビンの位置合わせ、当該給糸ボビンの保持、及び当該給糸ボビンの排出のうち少なくとも何れかのために動力を供給する駆動源が配置されていることが好ましい。
【0031】
これにより、ボビン保持装置が、外部の装置(例えば、下流側ユニット)から駆動力の供給を受けない構成が実現される。従って、ボビン保持装置を、駆動源を含めてユニット化して一体的に取り扱うことが容易になるので、メンテナンス作業等の効率化が実現される。
【0032】
本発明の第2の観点によれば、上記の巻取ユニットを複数並べて配置した糸巻取機が提供される。
【0033】
これにより、それぞれの巻取ユニットにおいて、ボビン保持装置の取外し/取付けの際に位置の再調整作業が不要になる。従って、ボビン保持装置のメンテナンス等が終了した後、巻取ユニットによる巻取りを早期に再開することができるので、糸巻取機の稼動効率を高めることができる。
【0034】
前記の糸巻取機においては、以下のように構成することが好ましい。即ち、前記ベース体は、複数の巻取ユニットに跨るように配置されて、それぞれの前記巻取ユニットの前記下流側ユニットを支持する。1つの前記ベース体に複数の前記巻取ユニットの前記基準部材が取り付けられる。
【0035】
これにより、糸巻取機の構成の簡素化を実現できる。
【0036】
本発明の第3の観点によれば、以下の構成のボビン保持装置の取付方法が提供される。即ち、このボビン保持装置の取付方法が適用される巻取ユニットは、ボビン保持装置と、下流側ユニットと、基準部材と、を備える。前記ボビン保持装置は、給糸ボビンを保持可能である。前記下流側ユニットは、前記給糸ボビンから解舒された糸を糸走行方向の下流へ案内してパッケージに巻き取る。前記基準部材は、前記下流側ユニットを支持する部材であるベース体に対して取り付けられる。そして、このボビン保持装置の取付方法は、第1工程と、第2工程と、第3工程と、を含む。前記第1工程は、前記基準部材を、前記ベース体に対して移動可能な状態である調整状態にした上で、当該基準部材の位置を前記下流側ユニットに対して合わせる。前記第2工程は、前記基準部材を、前記ベース体に対して移動不能な状態である固定状態に切り換える。前記第3工程は、前記基準部材に対して前記ボビン保持装置を固定する。
【0037】
これにより、基準部材をベース体に位置決めして固定した上で当該基準部材にボビン保持装置を固定するので、ボビン保持装置を取り外した場合でも、再び基準部材に取り付けるだけで、取外し前の位置関係を容易に再現できる。従って、位置の調整(第1工程及び第2工程)は最初の1回だけで良く、ボビン保持装置を取り外すごとに再調整する必要がないので、作業を大幅に効率化することができる。また、基準部材の位置決めによって、一般的に当該基準部材よりも大きく重い装置であるボビン保持装置の位置決めを実質的に実現できるので、位置決め作業自体も効率化することができる。
【図面の簡単な説明】
【0038】
【図1】本発明の一実施形態に係る自動ワインダの全体的な構成を示す外観斜視図。
【図2】ワインダユニットの模式的な側面図。
【図3】ワインダユニットの主要な構成を示すブロック図。
【図4】解舒補助装置の構成を示す拡大斜視図。
【図5】ボビン保持装置の構成を示す斜視図。
【図6】動力伝達部が備えるカムの形状を示す側面図。
【図7】主芯部材が受取姿勢にあるときの動力伝達部の様子を示す側面図。
【図8】主芯部材が解舒姿勢にあるときの動力伝達部の様子を示す側面図。
【図9】主芯部材が排出姿勢にあるときの動力伝達部の様子を示す側面図。
【図10】糸切れ等が発生したときにワインダユニットが行う処理を示すフローチャート。
【図11】給糸ボビンの解舒側端部の位置が調整される様子の前半部を示す側面図。
【図12】給糸ボビンの解舒側端部の位置が調整される様子の後半部を示す側面図。
【図13】給糸ボビンの解舒側端部の位置を調整する処理を示すフローチャート。
【図14】機台フレームに基準プレートを取り付ける様子を示す斜視図。
【図15】基準プレートを解舒補助装置に対して位置合わせする様子を示す側面図。
【図16】基準プレートにボビン保持装置を固定する様子を示す斜視図。
【図17】基準プレートに基準治具を取り付けて位置合わせする場合を示す側面図。
【発明を実施するための形態】
【0039】
次に、図面を参照して本発明の実施の形態を説明する。初めに、本実施形態の自動ワインダ1の概要について図1を参照して説明する。図1は、本発明の一実施形態に係る自動ワインダ1の外観斜視図である。なお、以下の説明において、ワインダユニット4の正面側を単に「正面側」、ワインダユニット4の背面側を単に「背面側」と称することがある。また、ワインダユニット4における糸巻取時での糸の走行方向における上流及び下流を、単に「上流」及び「下流」と称することがある。
【0040】
本実施形態の自動ワインダ(糸巻取機)1は、並べて配置された複数のワインダユニット(巻取ユニット)4と、複数のワインダユニット4の並べられた方向の一端に配置された機台制御装置7と、を備えている。
【0041】
各ワインダユニット4は、下部に配置された上流側ユニットとしてのボビン保持装置10と、上部に配置された下流側ユニット6と、を備えている。下流側ユニット6は、正面視で左右一側に設けられたユニットフレーム5を備えている。ユニットフレーム5の内部には、ボビン保持装置10及び下流側ユニット6の各部を制御するユニット制御部50(図3を参照)が配置されている。
【0042】
ユニットフレーム5は、ボビン保持装置10及び下流側ユニット6の設定等を入力可能なユニット入力部18と、巻取作業の状況等を表示可能なユニット表示部19と、を備えている。このユニット入力部18は、例えばキーやボタンとして構成することができる。
【0043】
機台制御装置7はこのユニット制御部50と通信可能に構成されているため、機台制御装置7によって複数のワインダユニット4の動作を集中的に管理することが可能となっている。また、機台制御装置7は、各ワインダユニット4に対して様々な設定(各ワインダユニット4の巻取作業に用いられる給糸ボビンの種類の入力等)を行うための機台入力部8と、各ワインダユニット4の巻取作業の状況等を表示可能な機台表示部9と、を備えている。
【0044】
次に、図2及び図3を参照して、ワインダユニット4について詳細に説明する。図2は、ワインダユニット4の模式的な側面図である。図3は、ワインダユニット4の主要な構成を示すブロック図である。ワインダユニット4は、給糸ボビン21の糸20を巻取ボビン22に巻き取ってパッケージ29を形成するための装置である。以下、このワインダユニット4の各部について説明する。
【0045】
図1及び図2に示すように、下流側ユニット6は、ワインダユニット4の正面側に配置された、オペレータが給糸ボビン21を供給するためのボビン供給装置60を備える。ボビン供給装置60は、ワインダユニット4の下部から正面上方向に延出されたマガジン保持部61と、このマガジン保持部61の先端に取り付けられているマガジンカン62と、マガジンカン62の下方に設置された給糸ボビン案内部64と、開閉部68と、を備えている。
【0046】
マガジンカン62には複数の収納孔が円状に並べて形成されており、それぞれの収納孔には、給糸ボビン21を傾斜姿勢でセットすることができる。また、このマガジンカン62は、図略のモータによって間欠的な回転送り駆動が可能であるように構成されている。そして、このマガジンカン62の間欠駆動と、マガジンカン62が備える図略の制御弁の開閉動作とによって、所定の給糸ボビン21を斜め下方へ落下させることができる。
【0047】
給糸ボビン案内部64は、マガジンカン62から落下してきた給糸ボビン21を斜めに滑落させて、ボビン保持装置10のボビン保持部110まで案内するように構成されている。
【0048】
ボビン保持装置10はハウジング115を備えている。このハウジング115には、図5に示すように、ボビン保持部110と、糸20の解舒が完了した給糸ボビン21(芯管21a)を排出するための跳ね板40と、が支持されている。また、ボビン保持装置10は、ボビン保持部110及び跳ね板40を動作させる駆動部200を備える。なお、ボビン保持装置10の詳細は後述する。
【0049】
ボビン供給装置60の開閉部68は、正面側(図2における手前側)と背面側(図2における奥側)との間で揺動可能な1対の開閉部材68a,68bで構成されており、1対の開閉部材68a,68bが、閉じた状態(図2で示す状態)と開いた状態とを切換可能になっている。開閉部68が閉じた状態においては、当該開閉部68の内面は給糸ボビン案内部64の一部分を構成する。つまり、開閉部68の内面は、マガジンカン62から落下してくる給糸ボビン21と接触して、当該給糸ボビン21を斜め下方のボビン保持装置10まで案内する。一方、開閉部68が開いた状態においては、巻取りが完了して糸20が巻かれていない状態になった給糸ボビン21を正面側に排出することができる。なお、開閉部68の正面側にはコンベア3(図1を参照)が配設されているので、自動ワインダ1は、開閉部68から排出された給糸ボビン21を、コンベア3によって、コンベア3の搬送方向端部に配置された図示しない給糸ボビン回収ボックスまで搬送することができる。
【0050】
また、ボビン保持部110は、図2及び図3に示すステッピングモータ(モータ)100が駆動することによって、正面側及び背面側に揺動可能に構成されている。なお、このステッピングモータ100は、図3に示すステッピングモータ制御部(制御部)102によって制御されている。また、ボビン保持装置10の適宜の位置には原点センサ101が取り付けられており、この原点センサ101が検出したステッピングモータ100の回転状態を基準として、当該ステッピングモータ100の回転制御が行われる。なお、この原点センサ101を取り付ける場所及び部材については後述する。
【0051】
また、ボビン保持部110は、背面側から正面側へ揺動することにより、給糸ボビン案内部64によって案内される給糸ボビン21を受取可能となっている。そして、ボビン保持部110は、背面側に揺動することにより、受け取った給糸ボビン21を略直立状態にすることができる。なお、ステッピングモータ100の駆動によってボビン保持部110を揺動させる機構、及びステッピングモータ制御部102が行う制御等の詳細は後述する。
【0052】
上記のようにボビン保持装置10のボビン保持部110にセットされた給糸ボビン21は、下流側ユニット6が備える巻取部16によって巻き取られる。この巻取部16は、図2に示すように、巻取ボビン22を装着可能に構成されたクレードル23と、糸20をトラバースさせるとともに前記巻取ボビン22を駆動するための綾振ドラム24と、を備えている。
【0053】
また、前記下流側ユニット6は、ボビン保持装置10と綾振ドラム24との間の糸走行経路中に、ユニットフレーム5により支持された各種の装置を備えている。具体的に説明すると、前記糸走行経路に配置される主要な装置として、ボビン保持装置10側から綾振ドラム24側へ向かって順に、糸縮れ発生防止装置11と、解舒補助装置12と、テンション付与装置13と、糸継装置14と、クリアラ(糸品質測定器)15と、が配置されている。
【0054】
解舒補助装置12は、図4に示すように、固定部材71と、可動部材(バルーン規制部)72と、昇降部材73と、チェース部検出センサ74と、を備える。図4は、解舒補助装置12の構成を示した拡大斜視図である。
【0055】
固定部材71は、適宜の部材を介してユニットフレーム5に固定されている。この固定部材71の下部には、バルーンを制御するための絞り部(図略)が形成されている。可動部材72は、筒状に形成されており、固定部材71の外側を覆うように配置されている。なお、以下の説明において、この筒状に構成された可動部材72の中心軸線及び当該中心軸線を延長した線を仮想線L1と称する。
【0056】
昇降部材73はこの可動部材72と一体的に形成されている。そして、昇降部材73は鉛直方向に移動可能に構成されているため、当該可動部材72を鉛直方向に移動させることができる。この昇降部材73は、給糸ボビン21のチェース部21b(図4を参照)を検出するためのチェース部検出センサ74を備えている。なお、チェース部21bとは、巻取動作の進行に伴う給糸ボビン21の糸層端部である。また、チェース部検出センサ74は、投光部74aと受光部74bとを有する透過式のフォトセンサとして構成されている。図3に示すように、チェース部検出センサ74が検出した検出信号はユニット制御部50に入力される。
【0057】
この構成により、チェース部検出センサ74の検出信号に基づいて昇降部材73を動作させることで、チェース部21bから所定の距離に可動部材72を位置させることができる。そして、給糸ボビン21が解舒されてチェース部21bの位置が下降するに従って昇降部材73を下降させることで、チェース部21bと可動部材72との距離を常に一定にすることができる。これにより、給糸ボビン21が解舒される際にチェース部21bから糸20が解離する位置で発生するバルーンを適切に規制することができ、給糸ボビン21から解舒された糸20の張力を一定に保ちながら巻取作業を行うことができる。
【0058】
ここで、解舒補助装置12が上記のような解舒補助作業を適切に行うためには、給糸ボビン21の解舒側端部を仮想線L1上の位置(解舒基準位置)に良好に一致させる必要がある。仮に給糸ボビン21の解舒側端部が解舒基準位置からズレていると、給糸ボビン21から糸20を解舒する際に、糸20の周回位置によってバルーンの大きさが変化し、これによって張力のムラが生じてしまうからである。この点、本実施形態では、給糸ボビン21の解舒側端部の位置を調整する制御、及び、ボビン保持装置10自体の厳密な位置決めにより、上記の要求を満たし、給糸ボビン21からの糸20の良好な解舒を実現している。なお、これらの詳細については後述する。
【0059】
解舒補助装置12の背面側には、糸20の縮れの発生を防止するための糸縮れ発生防止装置11が配置されている。ここで糸縮れとは、糸に生じる不具合の1つであり、糸が縮れ、螺旋状に絡み合っている状態である。前記糸縮れ発生防止装置11は、ブラシアーム11aと、ブラシアーム11aの先端に形成されたブラシ部11bと、を備えている。このブラシアーム11aは回動可能に構成されており、回動させることで、ブラシ部11bを給糸ボビン21の上端部分に接触させることができる。これにより、糸継作業時等において糸20に適切なテンションを付与し、糸縮れの発生を防止することができる。
【0060】
テンション付与装置13は、走行する糸20に所定のテンションを付与するものである。本実施形態のテンション付与装置13は、固定の櫛歯に対して可動の櫛歯を配置するゲート式に構成されている。可動側の櫛歯は、櫛歯同士が噛合せ状態又は解放状態になるように、ロータリ式のソレノイドにより回動可能に構成されている。
【0061】
解舒補助装置12とテンション付与装置13との間には下糸検出センサ31が配置されている。下糸検出センサ31は、配置される位置において糸20が走行しているか否かを検出可能に構成されている。
【0062】
クリアラ15は、糸20の糸太さを監視することにより、スラブ等の糸欠陥(糸欠点)を検出するように構成されている。また、クリアラ15よりも糸道の上流側(下方)には、当該クリアラ15が糸欠陥を検出したときに直ちに糸20を切断するためのカッタ39が配置されている。
【0063】
糸継装置14は、クリアラ15が糸欠陥を検出してカッタ39で糸20を切断する糸切断時、給糸ボビン21からの解舒中の糸20の糸切れ時、又は給糸ボビン21の交換時等に、給糸ボビン21側の下糸と、パッケージ29側の上糸とを糸継ぎするものである。このような糸継装置14としては、圧縮空気等の流体を用いるものや、機械式のものを使用することができる。
【0064】
糸継装置14の下側及び上側には、給糸ボビン21側の下糸を捕捉して案内する下糸案内パイプ25と、パッケージ29側の上糸を捕捉して案内する上糸案内パイプ26と、が設けられている。下糸案内パイプ25の先端には吸引口32が形成され、上糸案内パイプ26の先端にはサクションマウス34が備えられている。下糸案内パイプ25及び上糸案内パイプ26には適宜の負圧源がそれぞれ接続されており、前記吸引口32及びサクションマウス34に吸引力を生じさせることができる。
【0065】
この構成で、給糸ボビンの交換時等においては、下糸案内パイプ25の吸引口32が下方へ回動して下糸を吸引捕捉し、その後、軸33を中心にして上方へ回動することで糸継装置14まで下糸を案内する。また、これとほぼ同時に、ワインダユニット4は、上糸案内パイプ26を図2の位置から軸35を中心として上方へ回動させるとともにパッケージ29を逆回転させ、当該パッケージ29から解舒される上糸をサクションマウス34によって捕捉する。続いて、ワインダユニット4は、軸35を中心として上糸案内パイプ26を下方へ回動させることで、糸継装置14に上糸を案内するようになっている。そして、糸継装置14において、下糸と上糸の糸継ぎが行われる。
【0066】
また、ユニットフレーム5には、図2及び図3に示すように報知ランプ56が配置されている。この報知ランプ56は、図3に示すようにユニット制御部50と接続されており、下流側ユニット6の各部に発生した異常をオペレータに知らせることができる。なお、この報知ランプ56は、光を用いてオペレータに異常の発生を知らせる構成であるが、この構成に代えて、ブザー等によって報知する構成にしても良い。
【0067】
以上の構成で、自動ワインダ1の各ワインダユニット4は、給糸ボビン21から解舒された糸20を巻取ボビン22に巻き取って所定長のパッケージ29を形成することができる。
【0068】
次に、図5から図9までを参照して、ボビン保持装置10について詳細に説明する。図5は、ボビン保持装置10の構成を示す斜視図である。図6は、動力伝達部120が備えるカムの形状を示す側面図である。図7は、主芯部材80が受取姿勢にあるときの動力伝達部120の様子を示す側面図である。図8は、主芯部材80が解舒姿勢にあるときの動力伝達部120の様子を示す側面図である。図9は、主芯部材80が排出姿勢にあるときの動力伝達部120の様子を示す側面図である。
【0069】
前述のように、ボビン保持装置10は、供給された給糸ボビン21を保持するためのボビン保持部110と、糸20の解舒が完了した給糸ボビン21(芯管21a)を排出するための跳ね板40と、ボビン保持部110及び跳ね板40を動作させる駆動部200と、を備えている。また、駆動部200は、ステッピングモータ(駆動源)100と、このステッピングモータ100の動力を跳ね板40及びボビン保持部110に伝達する動力伝達部120と、で構成されている。
【0070】
ボビン保持装置10は中空状のハウジング115を有しており、このハウジング115に、ボビン保持部110と、跳ね板40と、ステッピングモータ100と、が取り付けられている。また、ハウジング115の内部には、前記の動力伝達部120が収容されている。
【0071】
ボビン保持部110は、図7から図9に示すように揺動して、給糸ボビン21の解舒側端部の位置を変更させることができる。また、ボビン保持部110は、主芯部材(規定部材)80と、補助芯部材(固定部材)90と、で構成されている。この主芯部材80及び補助芯部材90は、図7に示すように、給糸ボビン21が供給されたときには閉じた状態となっており、芯管21aの内部に入り込むようになっている。そして、この状態から補助芯部材90が主芯部材80から離れる方向に揺動することで、主芯部材80及び補助芯部材90が開いた状態となって、給糸ボビン21を保持することができる(図8を参照)。また、このボビン保持部110による給糸ボビン21の保持が解除された状態で、跳ね板40を揺動させることにより、芯管21aの底部を押し出して主芯部材80及び補助芯部材90から抜き、給糸ボビン21を排出することができる(図9を参照)。
【0072】
次に、動力伝達部120について説明する。動力伝達部120は、主芯部材80を揺動させるための構成として、主芯部材駆動カム81と、ベアリング82と、揺動アーム83と、位置決めアーム84aと、接触アーム84bと、伝達軸85と、押当てバネ86と、を備えている。また、動力伝達部120は、ステッピングモータ100の動力を主芯部材駆動カム81等に伝えるための構成として、伝達ベルト103と、プーリ104と、カム軸105と、を備えている。
【0073】
プーリ104はカム軸105に固定されており、このプーリ104は、ステッピングモータ100の出力軸に対し伝達ベルト103を介して連結されている。伝達ベルト103は図5では簡略的に描かれているが、歯付きのタイミングベルトとして構成されており、ステッピングモータ100の出力軸の回転を滑りなくカム軸105に伝達することができる。
【0074】
前記プーリ104には原点センサ101(図5には示していない)が取り付けられており、この原点センサ101は、プーリ104ないしカム軸105が所定の回転位相であるときに検知信号を送るように構成されている。そして、この原点センサ101が検知信号を送信するときの回転状態がステッピングモータ100の原点とされており、ステッピングモータ100の回転制御はこの原点を基準として行われるようになっている。
【0075】
主芯部材駆動カム81は前記カム軸105に固定されており、当該カム軸105と一体的に回転する。また、主芯部材駆動カム81よりも背面側には揺動アーム83が配置されており、この揺動アーム83の中途部には回転可能なベアリング82が取り付けられている。このベアリング82は、主芯部材駆動カム81の外周面に接触しながら適宜回転できるように構成されている。
【0076】
揺動アーム83の先端部は、動力伝達部120の適宜の位置に揺動可能に支持された位置決めアーム84aの下端部に、棒状のリンクを介して連結されている。位置決めアーム84aの上端部には回転可能な回転部材87が支持されている。
【0077】
位置決めアーム84aよりも正面側には、接触アーム84bが配置されている。この接触アーム84bの先端は、前記位置決めアーム84aに取り付けられた前記回転部材87に対して接触可能に構成されている。接触アーム84bの基部には伝達軸85の一端が固定されており、伝達軸85の他端は主芯部材80に固定されている。つまり、伝達軸85と主芯部材80とは連動するように構成されている。従って、主芯部材80は接触アーム84bと一体的に回転するようになっている。また、前記接触アーム84bには捩りコイルバネ状の押当てバネ86が取り付けられており、接触アーム84bを図5の矢印方向に付勢している。
【0078】
以上の構成で、接触アーム84bには押当てバネ86の弾性力が作用するため、その突出部が回転部材87に接触し、位置決めアーム84aを押す。更に、位置決めアーム84aの下端部がリンクを介して揺動アーム83を引っ張るので、揺動アーム83のベアリング82が主芯部材駆動カム81に押し当てられる。このように、押当てバネ86は、主芯部材駆動カム81とベアリング82とを接触させるとともに、接触アーム84bを位置決めアーム84aに接触させるためのバネ力を発生させている。
【0079】
この状態で主芯部材駆動カム81が回転し、主芯部材駆動カム81の周縁部(後述の膨らみ部)がベアリング82を押すと、揺動アーム83がカム軸105から離れる方向に回動し、当該揺動アーム83の先端がリンクを介して位置決めアーム84aの下端部を引っ張る。その結果、位置決めアーム84aの上端の回転部材87が接触アーム84bを押すので、主芯部材80を接触アーム84bとともに正面側へ揺動させることができる(図8を参照)。
【0080】
また、動力伝達部120は、ステッピングモータ100の動力を補助芯部材90に伝えるための構成として、補助芯部材駆動カム91と、ベアリング92と、揺動アーム93と、伝達アーム94と、伝達軸95と、保持バネ96と、を備えている。
【0081】
補助芯部材駆動カム91は、主芯部材駆動カム81と同様に、前記カム軸105に固定されている。補助芯部材駆動カム91よりも背面側には揺動アーム93が配置されており、この揺動アーム93の中途部には回転可能なベアリング92が取り付けられている。このベアリング92は、補助芯部材駆動カム91の外周面に接触しながら適宜回転できるように構成されている。
【0082】
揺動アーム93の先端部は、動力伝達部120の適宜の位置に揺動可能に支持された伝達アーム94の下端部に、棒状のリンクを介して連結されている。伝達アーム94の基部には伝達軸95の一端が取り付けられており、伝達軸95の他端は補助芯部材90に固定されている。つまり、伝達軸95と補助芯部材90とは連動するように構成されている。従って、補助芯部材90は伝達アーム94と一体的に回転するようになっている。また、前記伝達アーム94には捩りコイルバネ状の保持バネ96が取り付けられており、伝達アーム94を図5の点線矢印方向に付勢している。
【0083】
以上の構成で、保持バネ96は、補助芯部材90が背面側に揺動する方向(主芯部材80から離れる方向)のバネ力を、伝達アーム94及び伝達軸95を介して当該補助芯部材90に作用させている。同時に、保持バネ96の弾性力が作用する伝達アーム94の先端部がリンクを介して揺動アーム93を引っ張るので、揺動アーム93のベアリング92が補助芯部材駆動カム91に押し当てられる。このように、保持バネ96は、補助芯部材駆動カム91とベアリング92とを接触させるためのバネ力を発生させている。
【0084】
この状態で補助芯部材駆動カム91が回転し、補助芯部材駆動カム91の周縁部(後述の膨らみ部)がベアリング92を押すと、揺動アーム93がカム軸105から離れる方向に揺動し、当該揺動アーム93の先端がリンクを介して伝達アーム94の下端部を引っ張る。その結果、補助芯部材90を正面側(主芯部材80に近づく方向)に揺動させることができる。
【0085】
なお、所定の角度を超えて補助芯部材90を正面側に揺動させた場合、当該補助芯部材90が主芯部材80の図略の部分と接触し、それ以後は補助芯部材90が主芯部材80を押すようにして一体的に揺動するように構成されている(この場合、接触アーム84bの先端部と回転部材87とが適宜離間することになる)。即ち、補助芯部材90が所定の角度を超えて正面側に揺動している状態では、主芯部材80は主芯部材駆動カム81ではなく補助芯部材駆動カム91によって駆動されることになる。
【0086】
次に、跳ね板40を駆動するための構成について説明する。動力伝達部120は、ステッピングモータ100の動力を跳ね板40に伝えるための構成として、跳ね板駆動カム41と、ベアリング42と、揺動アーム43と、伝動アーム44と、伝達軸45と、戻しバネ46と、を備えている。
【0087】
跳ね板駆動カム41は、補助芯部材駆動カム91及び主芯部材駆動カム81と同様に、前記カム軸105に固定されている。跳ね板駆動カム41よりも背面側には揺動アーム43が配置されており、この揺動アーム43の中途部には回転可能なベアリング42が取り付けられている。このベアリング42は、跳ね板駆動カム41の外周面に接触しながら適宜回転できるように構成されている。
【0088】
揺動アーム43の先端部は、動力伝達部120の適宜の位置に揺動可能に支持された伝動アーム44の下端部に、棒状のリンクを介して連結されている。伝動アーム44の基部には伝達軸45の一端が固定されており、伝達軸45の他端は跳ね板40に固定されている。つまり、伝達軸45と跳ね板40とは連動するように構成されている。従って、跳ね板40は伝動アーム44と一体的に回転するようになっている。また、前記伝動アーム44には捩りコイルバネ状の戻しバネ46が取り付けられており、伝動アーム44を図5の矢印方向に付勢している。
【0089】
以上の構成で、戻しバネ46の弾性力が作用する伝動アーム44の先端部が、リンクを介して揺動アーム43を引っ張るので、揺動アーム43のベアリング42が跳ね板駆動カム41に押し当てられる。このように、戻しバネ46は、跳ね板駆動カム41とベアリング42とを接触させるためのバネ力を発生させている。
【0090】
この状態で跳ね板駆動カム41が回転し、跳ね板駆動カム41の周縁部(後述の膨らみ部)がベアリング42を押すと、揺動アーム43がカム軸105から離れる方向に移動し、当該揺動アーム43の先端がリンクを介して伝動アーム44の下端部を引っ張る。その結果、跳ね板40を正面側へ跳ね上げることができる(図9を参照)。
【0091】
次に、ワインダユニット4が、給糸ボビン21の受取り、給糸ボビン21の糸20が解舒される所定の位置での保持、及び排出を行う構成について説明する。前述のように、本実施形態において跳ね板駆動カム41、主芯部材駆動カム81及び補助芯部材駆動カム91は、共通のカム軸105に固定されたカム連結機構130として構成されており、3つのカム41,81,91が一体的に駆動するようになっている。また、図6に示すように、3つのカム41,81,91にはそれぞれ膨らみ部が形成されており、この膨らみによって跳ね板40、主芯部材80、補助芯部材90の姿勢を変更させることができる。補助芯部材駆動カム91の膨らみ部及び跳ね板駆動カム41の膨らみ部は緩やかに形成されているが、主芯部材駆動カム81の膨らみ部はやや鋭く形成されている。また、補助芯部材駆動カム91の膨らみ部と跳ね板駆動カム41の膨らみ部とはほぼ同じ位相で形成される一方、それらとほぼ180°異なる位相において主芯部材駆動カム81の膨らみ部が形成されている。
【0092】
以上の構成において、給糸ボビン21の受取りを行うときは、ステッピングモータ100を適宜駆動して3つのカム41,81,91を回転させ、揺動アーム93が有するベアリング92が、補助芯部材駆動カム91において膨らみ部のピーク部分を若干通り過ぎた箇所に接触した状態とし、この状態でカム41,81,91の回転を停止させる。これにより、図7に示すように、補助芯部材90は、直立状態から正面側に若干倒れた姿勢となる。
【0093】
この状態においては、補助芯部材90が所定の角度を超えて揺動しているため、前述のように主芯部材80も補助芯部材90に押される形で正面側に揺動しており、その姿勢は、補助芯部材90と同様に、直立状態から正面側に若干倒れている。そして、この状態で給糸ボビン21がマガジン保持部61から供給されると、ボビン保持部110(主芯部材80及び補助芯部材90)が芯管21aの内部に入り込む。なお、本明細書において、給糸ボビン21の受取りを行うときの主芯部材80の姿勢(図7の姿勢)を受取姿勢と称する。
【0094】
そして、受け取った給糸ボビン21について糸20の解舒を行うときは、ステッピングモータ100を再び駆動し、カム軸105を図7の矢印で示す方向に回転させる。これにより、揺動アーム43,93が有するベアリング42,92が、跳ね板駆動カム41及び補助芯部材駆動カム91において膨らみ部を完全に通り過ぎ、非膨らみ部に接触するようになる。また、揺動アーム83が有するベアリング82は、主芯部材駆動カム81において膨らみ部に接触するようになる。
【0095】
これに伴って、図8に示すように、跳ね板40は図7の状態から背面側に揺動して水平となるとともに、補助芯部材90が背面側へ若干倒れるように揺動する。また、前述したように補助芯部材90によって正面側に押されていた主芯部材80も、補助芯部材90の背面側への揺動に伴って同様に背面側に揺動していくが、やがて接触アーム84bが位置決めアーム84aの回転部材87に接触することで主芯部材80の揺動が止められ、以後は補助芯部材90のみが、保持バネ96のバネ力によって背面側へ揺動することになる。即ち、補助芯部材90が主芯部材80から相対的に離れるように変位するため、給糸ボビン21の芯管21aをボビン保持部110によって内側から保持することができる。
【0096】
このときの主芯部材80の揺動が止められる姿勢は、位置決めアーム84aが有する回転部材87の位置によって定まる。また、この位置決めアーム84aはリンクを介して揺動アーム83に連結されているので、主芯部材80の姿勢は、前記揺動アーム83のベアリング82が前記主芯部材駆動カム81の膨らみ部におけるどの部分に接触しているか(膨らみ部の立ち上がり部分に接触しているのか、ピーク部分に接触しているのか等)によって変更することができる。即ち、主芯部材駆動カム81の回転位相を変更することで、主芯部材80の姿勢を調整することができるのである。なお、このように主芯部材80の姿勢が変更される場合でも、補助芯部材90は保持バネ96の弾性力によって、給糸ボビン21の保持状態を問題なく維持することができる。
【0097】
なお、本明細書において、給糸ボビン21の解舒を行うときの主芯部材80の姿勢を解舒姿勢と称する。また、前記原点センサ101は、図8のように主芯部材80がほぼ直立した姿勢となっている状態でのプーリ104の回転位相を検出することとし、この状態がステッピングモータ100の回転制御における原点となるように設定されている。なお、主芯部材80の解舒姿勢は給糸ボビン21の種類等によって変化するものであるので、原点センサ101が検出する原点と前記解舒姿勢とは必ずしも一致しない。
【0098】
次に、給糸ボビン21の排出を行うときは、ステッピングモータ100を適宜駆動して3つのカム41,81,91を回転させる。これにより、揺動アーム43,93が有するベアリング42,92が、跳ね板駆動カム41及び補助芯部材駆動カム91の膨らみ部に接触する。従って、図9に示すように、跳ね板40は正面側に大きく揺動する。また、これと連動して、補助芯部材90が正面側に揺動することで給糸ボビン21の保持が解除されるとともに、当該補助芯部材90が主芯部材80を押しながら正面側に大きく揺動する。これにより、跳ね板40が給糸ボビン21の芯管21aの下端を押し上げて、当該給糸ボビン21を排出することができる。なお、本明細書において、給糸ボビン21の排出を行うときの主芯部材80の姿勢を排出姿勢と称する。
【0099】
以上のように、本実施形態では、単一の駆動源であるステッピングモータ100を駆動するだけで、給糸ボビン21の受取り、解舒姿勢での給糸ボビン21の保持(及び当該解舒姿勢の調整)、及び給糸ボビン21の排出を行うことができる。
【0100】
次に、図10から図12までを参照して、自動ワインダ1が給糸ボビン21を交換しつつ巻取りを行うときの一連の流れについて説明する。図10は、糸切れ等が発生したときにワインダユニット4が行う処理を示すフローチャートである。図11は、給糸ボビン21の解舒側端部の位置が調整される様子の前半部を示す側面図である。図12は、給糸ボビン21の解舒側端部の位置が調整される様子の後半部を示す側面図である。
【0101】
ワインダユニット4による巻取動作中において、クリアラ15が糸欠陥を検出してカッタ39で糸20を切断したり、給糸ボビン21からの解舒中の糸20の糸切れが発生したり、給糸ボビン21の糸20を解舒し終わって糸20が無くなったりすることがある。ワインダユニット4はこの糸切れ等を監視しており(S101)、糸切れ等が発生したときには、巻取動作を停止させる(S102)。
【0102】
そして、巻取動作が停止すると、下方に位置している下糸案内パイプ25の吸引口32による下糸の吸引捕捉と、上糸案内パイプ26による上糸の吸引捕捉と、が行われ、糸継装置14での糸継ぎが開始される(S102)。その後、ユニット制御部50は、下糸検出センサ31の検出結果に基づいて、糸継ぎ後に下糸があるか否かを判断している(S103)。
【0103】
カッタ39による糸20の切断又は解舒中の糸20の糸切れが発生していた場合は、給糸ボビン21に糸20が残っており、機械的なミス等が起こらなければ糸継ぎが完了する。従って、下糸検出センサ31によって下糸が検出される。この場合、ユニット制御部50は、ボビン保持装置10及び下流側ユニット6の各構成を制御して糸20の巻取りを再開させる。
【0104】
一方、給糸ボビン21の糸20を全て解舒し終わって糸20が無くなった場合は、糸継ぎができないので、下糸検出センサ31によって下糸が検出されない。このとき、ユニット制御部50は、給糸ボビン21の糸20の解舒が完了したと判断し、ボビン保持部110及び跳ね板40を動作させて芯管21aの排出処理を行わせる(S104)。その後、ユニット制御部50は、ボビン供給装置60に給糸ボビン21の供給を新たに行わせる(S105)。このとき、ステッピングモータ制御部102はステッピングモータ100を駆動させ、主芯部材80を受取姿勢まで予め移動させておく。
【0105】
新たに供給された給糸ボビン21は、図11(a)に示すように、ボビン保持装置10に案内される。そして、ステッピングモータ制御部102は、ボビン保持部110を背面側へ揺動する。
【0106】
なお、本実施形態のワインダユニット4は、ボビン保持部110を背面側に揺動させるときに、給糸ボビン21がチェース部検出センサ74の検出範囲を横切るように、ボビン保持部110のレイアウト等が考慮されている。そして、ユニット制御部50は、このチェース部検出センサ74の検出結果に基づいて、給糸ボビン21が新たに供給されたか否かを判断している(S106)。具体的には、ユニット制御部50が給糸ボビン21の供給を新たに行うように指示した後にチェース部検出センサ74によって給糸ボビン21が検出された場合は、給糸ボビン21が新たに供給されたと判断される。一方、所定時間以内にチェース部検出センサ74によって給糸ボビン21が検出されなかった場合は、給糸ボビン21が新たに供給されていないと判断される。
【0107】
給糸ボビン21が新たに供給されたと判断した場合、ユニット制御部50は、新しく供給された給糸ボビン21の糸端とパッケージ29側の糸端とを捕捉させて、糸継装置14による糸継ぎを開始させる(S110)。
【0108】
給糸ボビン21が新たに供給されていないと判断した場合、ユニット制御部50は、糸継作業を開始することなく、報知ランプ56に対して適宜の信号を送る。この信号を受信した報知ランプ56は、予め設定された表示色等を用いて、給糸ボビン21が新たに供給されていない旨をオペレータに通知する(S107)。
【0109】
そして、本実施形態のユニット制御部50は、給糸ボビン21が新たに供給されていないと判断して報知ランプ56に適宜の信号を送ってから、この不具合が解消されるまで、下糸の捕捉動作、上糸の捕捉動作、及び糸継ぎを行わないように構成されている。また、オペレータは、報知ランプ56の通知によってボビン供給装置60に給糸ボビン21が供給されていない旨を知ることができる。そして、オペレータが、ボビン供給装置60に給糸ボビン21を供給して(S108)、エラー解除ボタンを操作(S109)することにより、報知ランプ56の通知を止めることができる。その後、ユニット制御部50の指示により、ボビン供給装置60が給糸ボビン21の供給を新たに行う(S105)。
【0110】
ユニット制御部50は、給糸ボビン21が供給されたか否かを上記と同様に再び判断する(S106)。給糸ボビン21が供給されたと判断した場合、ユニット制御部50は、新しく供給された給糸ボビン21の糸端とパッケージ29側の糸端とを捕捉させて、糸継ぎを開始させる(S110)。
【0111】
続いて、ユニット制御部50は、糸継ぎと並行して給糸ボビン21の解舒側端部の位置の調整を行う(S111)。以下、この給糸ボビン21の解舒側端部の位置を調整する制御について、図11から図13を参照して説明する。図13は、給糸ボビン21の解舒側端部の位置を調整する処理を示すフローチャートである。
【0112】
本実施形態のワインダユニット4は、解舒補助装置12が備えるチェース部検出センサ74を給糸ボビン21が横切るようにボビン保持部110を実際に揺動させた上で、チェース部検出センサ74が給糸ボビン21を検知するタイミングに基づいて、当該給糸ボビン21の位置を調整している。これにより、本実施形態のワインダユニット4は、給糸ボビン21の解舒側端部を解舒基準位置に精度良く位置決めできる構成となっている。また、本実施形態のワインダユニット4は、解舒補助装置12の可動部材72が移動することで給糸ボビン21に被さる構成となっているが、上記のように給糸ボビン21の解舒側端部を正確に位置決めすることで、可動部材72と給糸ボビン21との接触を確実に防止することができる。
【0113】
以下、具体的に説明する。即ち、ステッピングモータ制御部102は、ステッピングモータ100を制御することにより、受取姿勢にある主芯部材80を背面側に回動して給糸ボビン21を一度直立させる。このときユニット制御部50は、図11(b)に示すように、糸縮れ発生防止装置11のブラシ部11bを給糸ボビン21の上端部分に接触させて、糸20に適切なテンションを付与し、糸縮れの発生を防止させる(S201)。その後、ステッピングモータ制御部102は、給糸ボビン21を再び正面側へ若干倒すようにボビン保持部110を揺動させる(S202)。そして、ユニット制御部50は、チェース部検出センサ74によって給糸ボビン21が検出されたときにボビン保持部110の揺動を停止させる(S203,図12(a))。
【0114】
ユニット制御部50は記憶部としてのメモリを備えており、このメモリは、チェース部検出センサ74によって給糸ボビン21が検出され始めた位置から何パルス分だけステッピングモータ100を駆動させれば給糸ボビン21を適切な位置にできるか(調整距離)を、用いる給糸ボビン21の種類等と対応付けて記憶している。また、オペレータは、巻取作業を始める前に、用いる給糸ボビン21の種類をユニット入力部18に入力している。これにより、ユニット制御部50には、現在の巻取作業において用いるべき調整距離が設定されている。そして、ユニット制御部50は、この設定された調整距離に基づいて、ステッピングモータ100に所定のパルス数を出力して、ボビン保持部110を背面側に揺動する(S204,図12(b))。
【0115】
これにより、給糸ボビン21の解舒側端部を解舒基準位置に合わせることができる。従って、解舒補助装置12の機能を適正に発揮させつつ、可動部材72と給糸ボビン21との接触を防止することができる。
【0116】
なお、用いる給糸ボビン21の種類が変更された場合は、ユニット入力部18に適宜の入力を行うことにより、適切な調整距離をユニット制御部50に設定することができる。また、この入力は、ユニット入力部18に行うことに代えて、機台入力部8に行うこともできる。この場合、機台制御装置7は、機台入力部8に入力された内容を各ワインダユニット4に送信する。これにより、各ワインダユニット4のユニット制御部50に対して、一括して適切な調整距離を設定することができる。
【0117】
次に、上記したボビン保持装置10の自動ワインダ1に対する組付けについて、図14から図17を中心に参照して説明する。図14は、機台フレームの第1フレームメンバ151に基準プレート141を取り付ける様子を示す斜視図である。図15は、基準プレート141を解舒補助装置12に対して位置合わせする様子を示す側面図である。図16は、基準プレート141にボビン保持装置10を固定する様子を示す斜視図である。図17は、基準プレート141に基準治具143xを取り付けて位置合わせする場合を示す側面図である。
【0118】
前述のとおり、ワインダユニット4はボビン保持装置10と下流側ユニット6とを備えているが、これらは共通の機台フレーム(ベース体)によって支持されている。具体的には、自動ワインダ1は、ワインダユニット4が並べられる方向に細長い機台フレームを備え、この機台フレームは、図2に示すように、第1フレームメンバ151と、第2フレームメンバ152と、第3フレームメンバ153と、を備えている。これらのフレームメンバ151〜153は、図示しない連結メンバによって互いに連結されている。
【0119】
第1フレームメンバ151は角パイプ状に構成されて、機台の下部に配置される。第2フレームメンバ152は丸パイプ状に構成されて、第1フレームメンバ151より上方の高さに配置される。第3フレームメンバ153は断面矩形状に構成されて、第2フレームメンバ152よりやや上方に配置される。
【0120】
以上の機台フレームの構成で、図2に示すように、ボビン保持装置10は第1フレームメンバ151に固定される。一方、下流側ユニット6は、第2フレームメンバ152及び第3フレームメンバ153に固定される。このように、ボビン保持装置10と下流側ユニット6とは互いに分離されており、機台フレームに対して別々に取り付けられるので、ボビン保持装置10の取付位置を下流側ユニット6とは無関係に調整することができる。
【0121】
そして、ボビン保持装置10は第1フレームメンバ151に直接取り付けられるのではなく、板状の部材である基準プレート(基準部材)141を介在させるようにして取り付けられる。図14には、基準プレート141を第1フレームメンバ151に取り付ける様子が示されている。
【0122】
基準プレート141は、所定の厚みを有する平面視略L字状のプレートとして形成されている。この基準プレート141には、調整孔(孔)142と、位置確認孔(目印、貫通孔)143と、ボビン保持装置固定孔144と、引掛け孔(重量支持部)145と、が形成されている。
【0123】
調整孔142は、貫通状に形成された円形孔であり、適宜の間隔をあけて2つ設けられている。この調整孔142には、基準プレート141を第1フレームメンバ151に取り付けるための固定具である締付ボルト(ボルト)161の軸部を差し込むことができる。この締付ボルト161を、第1フレームメンバ151側に固定されたナット162にねじ込むことで、基準プレート141を第1フレームメンバ151に取り付けることができる。
【0124】
調整孔142の径は締付ボルト161の軸部の径よりもある程度大きく設定されており、こうして形成される遊びにより、締付ボルト161を緩めたときには基準プレート141はある程度の範囲で変位することができる。
【0125】
位置確認孔143は、基準プレート141に形成された貫通孔として形成されている。この位置確認孔143は、当該基準プレート141にボビン保持装置10を取り付けたときに、当該ボビン保持装置10が有するボビン保持部110の軸に対応する位置に形成されている。
【0126】
ボビン保持装置固定孔144は、貫通状に形成されたネジ孔であり、適宜の間隔をあけて2つ設けられている。このボビン保持装置固定孔144には、図16に示す固定ネジ171を用いて、ボビン保持装置10を基準プレート141に固定することができる。
【0127】
引掛け孔145は、図14に示すように、貫通状に形成された円形孔として構成されている。この引掛け孔145には、図16に示すボビン保持装置10が備える差込突起118を差し込むことができるように構成されている。
【0128】
なお、図14に示すように、第1フレームメンバ151には、上記した締付ボルト161の軸部を通過させるための貫通孔が形成されているほか、ボビン保持装置固定孔144及び引掛け孔145に対応する部位にも貫通孔が形成されている。ボビン保持装置固定孔144及び引掛け孔145に対応する貫通孔は、後述のように基準プレート141を変位させた場合でもボビン保持装置固定孔144及び引掛け孔145を塞ぐことのないように、若干大きく形成されている。
【0129】
この構成で、ボビン保持装置10を自動ワインダ1に組み付ける場合は、作業者は、図14に示すようにして基準プレート141を第1フレームメンバ151に取り付ける。ただし、このとき作業者は、締付ボルト161を完全には締め付けずに、ある程度緩めた状態としておく。すると、基準プレート141は、調整孔142と締付ボルト161の軸部との間に形成されている遊びの分に相当するストロークの範囲内で、第1フレームメンバ151上を移動することができる(調整状態)。
【0130】
作業者は、この状態で、位置確認孔143を上から確認しながら、前記解舒補助装置12が有する可動部材72の軸線の延長線(前記仮想線L1)上に当該位置確認孔143が位置するように、基準プレート141の位置を動かして調整する(図15を参照)。なお、図15には基準プレート141を背面側又は正面側に移動させて調整する様子が矢印で示されているが、上記の調整孔142の遊びは全周にわたって設けられているため、調整の方向は任意である。従って、基準プレート141を上記と垂直な方向(即ち、ワインダユニット4が並べられる方向、第1フレームメンバ151の長手方向に沿う方向)に移動させて調整することも可能になっている。作業者は、上記の位置合わせが完了した後、締付ボルト161を強く締め付けて、基準プレート141を移動不能に固定する(固定状態)。
【0131】
次に、作業者は、上記のように位置決めされた基準プレート141に対して、図16に示すようにボビン保持装置10を固定する。このボビン保持装置10が備えるハウジング115は、第1フレームメンバ151と垂直な向きに細長く形成されており、その部分の端部に近い位置において、所定の厚みを有する取付プレート116がハウジング115の下面に固定されている。
【0132】
この取付プレート116には、貫通状の取付孔117が2つ形成されている。この取付孔117は、ハウジング115の両側に配置されるとともに、基準プレート141に形成されたボビン保持装置固定孔144と対応する位置に配置されている。また、取付プレート116の下面には、下向きに突出する円柱状の差込突起118が備えられている。
【0133】
上記の構成で、まず作業者は、基準プレート141に形成された引掛け孔145に対し、ボビン保持装置10の下面の差込突起118を差し込むようにして、ボビン保持装置10を基準プレート141上に載せる。なお、これによりボビン保持装置10は一端を片持ち支持される形になるが、差込突起118と引掛け孔145の間には僅かの隙間しか形成されないように寸法が設定されているため、差込突起118が引掛け孔145に引っ掛かるような形となって、ボビン保持装置10が落下しないように支持することができる。ここで、上記のボビン保持装置10はハウジング115、ステッピングモータ100やカム連結機構130等を有しており、全体として相当に大きな重量となっているが、本実施形態の構成によれば、ボビン保持装置10の重量を支持させた状態で取付作業ができるため、作業者の負担を大幅に軽減することができる。
【0134】
次に、作業者は、それぞれの取付孔117に固定ネジ171を差し込み、ボビン保持装置固定孔144にねじ込む。ここで、固定ネジ171と取付孔117及びボビン保持装置固定孔144との間には、ガタ等が生じないように厳格な公差が設定されている。従って、2つの固定ネジ171を締め付けることにより、基準プレート141に対するボビン保持装置10の位置がただ1つに定まるように、ボビン保持装置10を基準プレート141に固定することができる。
【0135】
以上によりボビン保持装置10の設置が完了し、巻取作業が可能な状態になるが、上述したように、基準プレート141が有する位置確認孔143は、ボビン保持装置10のボビン保持部110の軸に対応する位置に配置されている。従って、解舒補助装置12の可動部材72の軸線に位置確認孔143を合わせて基準プレート141を固定し、その上で当該基準プレート141にボビン保持装置10を固定することで、ボビン保持部110の軸が解舒補助装置12の可動部材72の軸線に一致することになる。従って、上述した給糸ボビン21の解舒側端部の位置制御ともあいまって、解舒補助装置12による解舒補助作業を適切に行わせることができる。
【0136】
ところで、上述したグリスの塗り直しが必要になる等、何らかの事情により、自動ワインダ1からボビン保持装置10を取り外してメンテナンス作業を行う必要が生じる場合がある。この場合、作業者は、固定ネジ171だけを外して(締付ボルト161は外さず)、基準プレート141を第1フレームメンバ151側に残した状態でボビン保持装置10を取り外せば良い。ボビン保持装置10のメンテナンスが完了した後は、ボビン保持装置10を基準プレート141に取り付けるだけで、ボビン保持装置10を適切に位置決めした状態を再現できる。従って、直ぐに巻取作業を再開することができる。
【0137】
次に、図17を参照して、基準プレート141の位置を調整する作業の変形例を説明する。なお、図17の変形例において、前述の実施形態と同一又は類似の部材には図面に同一の符号を付し、説明を省略する場合がある。
【0138】
図17の例では、作業者は、基準プレート141の位置確認孔143に対して着脱可能な基準治具143xを用意して、当該基準治具143xを位置確認孔143に差し込んで立てた状態で位置合わせ作業を行う。これにより、位置合わせの基準(軸)が視覚的に明確になるので、より厳密な位置決めを実現することができる。位置合わせの完了後、基準治具143xは、ボビン保持装置10の取付けの邪魔にならないように基準プレート141から取り外される。
【0139】
以上に説明したように、本実施形態のワインダユニット4は、ボビン保持装置10と、下流側ユニット6と、基準プレート141と、を備える。ボビン保持装置10は、給糸ボビン21を保持可能である。下流側ユニット6は、給糸ボビン21から解舒された糸20を糸走行方向の下流へ案内してパッケージ29に巻き取る。基準プレート141は、下流側ユニット6を支持する部材である機台フレーム(具体的には、当該機台フレームを構成する第1フレームメンバ151)に対して取り付けられる。基準プレート141は、締付ボルト161を緩めたり締め付けたりすることで、第1フレームメンバ151に対して移動可能な状態である調整状態と、第1フレームメンバ151に対して移動不能な状態である固定状態と、を切換可能に構成している。ボビン保持装置10は、基準プレート141に対する取付け及び取外しが可能である。そして、当該ボビン保持装置10が基準プレート141に取り付けられる際は、基準プレート141に対する位置がただ1つに定まるように基準プレート141に対して固定される。
【0140】
これにより、基準プレート141を第1フレームメンバ151に位置決めして固定した上で当該基準プレート141にボビン保持装置10を固定するので、ボビン保持装置10を取り外した場合でも、再び基準プレート141に取り付けることで、取外し前の位置関係を容易に再現できる。従って、位置の調整は最初の1回だけで良く、ボビン保持装置10を取り外すごとに再調整する必要がないので、作業を大幅に効率化することができる。また、基準プレート141の位置決めによって、一般的に当該基準プレート141よりも大きく重い装置であるボビン保持装置10の位置決めを実質的に実現できるので、位置決め作業自体も効率化することができる。
【0141】
また、本実施形態のワインダユニット4においては、基準プレート141には調整孔142が設けられ、この調整孔142に締付ボルト161を差し込むことで基準プレート141が第1フレームメンバ151に取り付けられている。締付ボルト161の軸部と調整孔142との間には遊びが設けられている。
【0142】
これにより、締付ボルト161を緩めたり締め付けたりする簡単な構成で、基準プレート141の調整状態と固定状態とを切り換えることができる。また、締付ボルト161の軸部の周囲に形成された遊びを利用して、基準プレート141の位置を調整可能な構成を簡単に実現することができる。
【0143】
また、本実施形態のワインダユニット4においては、下流側ユニット6は、給糸ボビン21からの糸20の解舒を補助する解舒補助装置12を備える。基準プレート141は、ボビン保持装置10に保持される給糸ボビン21の中心位置に対応した目印としての位置確認孔143を有している。
【0144】
これにより、基準プレート141の第1フレームメンバ151への取付け時に、目印と解舒補助装置12との位置関係を調整することにより、後でボビン保持装置10を基準プレート141に取り付けたときに、当該ボビン保持装置10に保持される給糸ボビン21の中心を解舒補助装置12との関係で適切に位置させることができる。また、作業者は、ボビン保持装置10そのものではなく基準プレート141の目印を使って位置合わせを行うことになるので、位置関係が視覚的に把握し易くなる。この結果、位置合わせ作業の効率化を実現できる。
【0145】
また、本実施形態のワインダユニット4においては、基準プレート141に形成された貫通孔としての位置確認孔143が、上記の目印として用いられている。
【0146】
これにより、簡単な構成で目印を得ることができるので、ワインダユニット4の低コスト化を実現できる。
【0147】
また、本実施形態のワインダユニット4において、解舒補助装置12は、給糸ボビン21の糸20が解舒される解舒位置において形成されるバルーンの大きさを調整する円筒形状の可動部材72を備える。そして、締付ボルト161を緩めた状態(上記の調整状態)において、基準プレート141の位置は、前記可動部材72の軸線の延長線上に位置確認孔143が位置するように調整される。
【0148】
これにより、ボビン保持装置10を基準プレート141に取り付けたときに、当該ボビン保持装置10に保持される給糸ボビン21の中心を、可動部材72の軸線の延長線上に位置させることができる。この結果、給糸ボビン21からの解舒時に周回位置によってバルーンの大きさが不均一になることが防止され、給糸ボビン21から解舒される糸20に安定したテンションを付与して高品質のパッケージ29を形成することができる。
【0149】
また、図17の変形例の構成では、基準プレート141は、ボビン保持装置10に保持される給糸ボビン21の中心位置に対応した位置に、目印となる基準治具143xを取り付けることができる。
【0150】
これにより、基準プレート141の第1フレームメンバ151への取付け時に、目印となる基準治具143xと解舒補助装置12との位置関係を調整することにより、後でボビン保持装置10を基準プレート141に取り付けたときに、当該ボビン保持装置10に保持される給糸ボビン21の中心を解舒補助装置との関係で適切に位置させることができる。また、作業者は、ボビン保持装置10そのものではなく基準治具143xを使って位置合わせを行うことになるので、位置関係が視覚的に把握し易くなる。この結果、位置合わせ作業の効率化を実現できる。
【0151】
また、上記の変形例の構成では、締付ボルト161を緩めた状態(上記の調整状態)において、基準プレート141の位置は、当該基準治具143xの中心と前記可動部材72の軸線とが一致するように調整される。
【0152】
これにより、ボビン保持装置10を基準プレート141に取り付けたときに、当該ボビン保持装置10に保持される給糸ボビン21の中心を、可動部材72の軸線の延長線上に位置させることができる。この結果、給糸ボビン21からの解舒時に周回位置によってバルーンの大きさが不均一になることが防止され、解舒される糸20に安定したテンションを付与して高品質のパッケージ29を形成することができる。
【0153】
また、本実施形態のワインダユニット4において、基準プレート141は板状に形成された部材である。
【0154】
これにより、ボビン保持装置10の位置決めのための構成を簡素化できる。
【0155】
また、本実施形態のワインダユニット4において、基準プレート141は、当該基準プレート141にボビン保持装置10が固定されるまでの間、ボビン保持装置10の重量を一時的に支持する引掛け孔145を有する。
【0156】
これにより、ボビン保持装置10の大きな重量を引掛け孔145部で支持しながら、当該ボビン保持装置10を基準プレート141に固定することができる。従って、ボビン保持装置10の重量を作業者自身が手で支えながら固定作業を行う構成と比較して、作業者の負担を大幅に軽減し、作業効率を高めることができる。
【0157】
また、本実施形態のワインダユニット4において、ボビン保持装置10は、その一端側が基準プレート141に対して片持ち状に取り付けられる。
【0158】
これにより、ボビン保持装置10の基準プレート141への固定の際に、当該ボビン保持装置10の重量が引掛け孔145で支持されるので、当該ボビン保持装置が落下したり傾いたりすることを防止できる。従って、作業効率を高めることができる。
【0159】
また、本実施形態のワインダユニット4において、ボビン保持装置10にはステッピングモータ100が配置されている。このステッピングモータ100は、供給された給糸ボビン21の位置合わせ(解舒姿勢の調整)、給糸ボビン21の保持、及び給糸ボビン21の排出を行うための駆動力を供給する。
【0160】
これにより、ボビン保持装置10が、外部の装置(例えば、下流側ユニット6)から駆動力の供給を受けない構成が実現される。従って、ボビン保持装置10を、駆動源を含めてユニット化して一体的に取り扱うことが容易になるので、メンテナンス作業等の効率化が実現される。
【0161】
また、本実施形態の自動ワインダ1は、上記の構成のワインダユニット4を複数並べて配置した構成になっている。
【0162】
これにより、それぞれのワインダユニット4において、ボビン保持装置10の取外し/取付けの際に位置の再調整作業が不要になる。従って、ボビン保持装置10のメンテナンス等が終了した後、ワインダユニット4による巻取りを早期に再開することができるので、自動ワインダ1の稼動効率を高めることができる。
【0163】
また、本実施形態の自動ワインダ1において、基準プレート141が取り付けられる機台フレームは、複数のワインダユニット4に跨るように配置される。そして、1つの機台フレーム(第1フレームメンバ151)に、複数のワインダユニット4の基準プレート141が取り付けられる。
【0164】
これにより、自動ワインダ1の構成の簡素化を実現できる。
【0165】
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
【0166】
プレート状に形成された基準プレート141に代えて、例えばブロック状の部材を第1フレームメンバ151に取り付けて用いることができる。
【0167】
遊びを有する調整孔142は、基準プレート141ではなく、第1フレームメンバ151側に形成しても良い。
【0168】
基準プレート141に付けられる目印としては、位置確認孔143のように貫通孔とすることに限らず、例えば、基準プレート141の上面に開口する凹部としたり、上面から突出する凸部としたり、上面に刻印された目盛りや十字マーク等としたりすることができる。
【0169】
基準プレート141に引掛け孔145を形成する代わりに、当該基準プレート141に差込突起を設け、ボビン保持装置10のハウジング115側に凹部あるいは貫通孔を設けるように変更することができる。
【0170】
ボビン保持装置10の構成は、上記実施形態で示すものに限らず、適宜変更することができる。例えば、ステッピングモータ100は、供給された給糸ボビン21の位置合わせ(解舒姿勢の調整)、給糸ボビン21の保持、及び給糸ボビン21の排出の全てではなく、一部についてのみ動力を供給する構成であっても良い。
【符号の説明】
【0171】
1 自動ワインダ(糸巻取機)
4 ワインダユニット(巻取ユニット)
6 下流側ユニット
10 ボビン保持装置
12 解舒補助装置
20 糸
21 給糸ボビン
29 パッケージ
72 可動部材(バルーン規制部)
100 ステッピングモータ(駆動源)
141 基準プレート(基準部材)
142 調整孔(孔)
143 位置確認孔(目印、貫通孔)
143x 基準治具
145 引掛け孔(重量支持部)
151 第1フレームメンバ(ベース体を構成する部材)
161 締付ボルト(ボルト)
【特許請求の範囲】
【請求項1】
給糸ボビンを保持可能なボビン保持装置と、
前記給糸ボビンから解舒された糸を糸走行方向の下流へ案内してパッケージに巻き取る下流側ユニットと、
前記下流側ユニットを支持する部材であるベース体に対して取り付けられる基準部材と、
を備え、
前記基準部材は、前記ベース体に対して移動可能な状態である調整状態と、前記ベース体に対して移動不能な状態である固定状態と、を切換可能に構成しており、
前記ボビン保持装置は、前記基準部材に対する取付け及び取外しが可能であり、当該ボビン保持装置が前記基準部材に取り付けられる際は、前記基準部材に対する位置がただ1つに定まるように当該基準部材に対して固定されることを特徴とする巻取ユニット。
【請求項2】
請求項1に記載の巻取ユニットであって、
前記ベース体及び前記基準部材のうち少なくとも一方には孔が設けられ、この孔にボルトを差し込むことで前記基準部材が前記ベース体に取り付けられており、
前記ボルトの軸部と前記孔との間には遊びが設けられていることを特徴とする巻取ユニット。
【請求項3】
請求項1又は2に記載の巻取ユニットであって、
前記下流側ユニットは、前記給糸ボビンからの糸の解舒を補助する解舒補助装置を備え、
前記基準部材は、前記ボビン保持装置に保持される前記給糸ボビンの中心位置に対応した目印を有していることを特徴とする巻取ユニット。
【請求項4】
請求項3に記載の巻取ユニットであって、
前記目印は、前記基準部材に形成された凹部又は貫通孔であることを特徴とする巻取ユニット。
【請求項5】
請求項4に記載の巻取ユニットであって、
前記解舒補助装置は、前記給糸ボビンの糸が解舒される解舒位置において形成されるバルーンの大きさを調整する円筒形状のバルーン規制部を備え、
前記調整状態において、前記基準部材の位置は、前記バルーン規制部の軸線の延長線上に前記目印が位置するように調整されることを特徴とする巻取ユニット。
【請求項6】
請求項1又は2に記載の巻取ユニットであって、
前記下流側ユニットは、前記給糸ボビンからの糸の解舒を補助する解舒補助装置を備え、
前記基準部材は、前記ボビン保持装置に保持される前記給糸ボビンの中心位置に対応した位置に、目印となる基準冶具を取付可能であることを特徴とする巻取ユニット。
【請求項7】
請求項6に記載の巻取ユニットであって、
前記解舒補助装置は、前記給糸ボビンの糸が解舒される解舒位置において形成されるバルーンの大きさを調整する円筒形状のバルーン規制部を備え、
前記基準冶具は真っ直ぐに細長く形成され、
前記調整状態において、前記基準部材の位置は、当該基準部材に前記基準冶具を取り付けた上で、当該基準冶具の中心と前記バルーン規制部の軸線とが一致するように調整されることを特徴とする巻取ユニット。
【請求項8】
請求項1から6までの何れか一項に記載の巻取ユニットであって、
前記基準部材は板状に形成されていることを特徴とする巻取ユニット。
【請求項9】
請求項1から8までの何れか一項に記載の巻取ユニットであって、
前記基準部材は、当該基準部材に前記ボビン保持装置が取り付けられるまでの間、当該ボビン保持装置の重量を一時的に支持する重量支持部を有することを特徴とする巻取ユニット。
【請求項10】
請求項9に記載の巻取ユニットであって、
前記ボビン保持装置は、その一端が前記基準部材に対して片持ち状に取り付けられることを特徴とする巻取ユニット。
【請求項11】
請求項1から10までの何れか一項に記載の巻取ユニットであって、
前記ボビン保持装置には、供給された前記給糸ボビンの位置合わせ、当該給糸ボビンの保持、及び当該給糸ボビンの排出のうち少なくとも何れかのために動力を供給する駆動源が配置されていることを特徴とする巻取ユニット。
【請求項12】
請求項1から11までの何れか一項に記載の巻取ユニットを複数並べて配置したことを特徴とする糸巻取機。
【請求項13】
請求項12に記載の糸巻取機であって、
前記ベース体は、複数の巻取ユニットに跨るように配置されて、それぞれの前記巻取ユニットの前記下流側ユニットを支持するベース部材であり、
1つの前記ベース部材に複数の前記巻取ユニットの前記基準部材が取り付けられることを特徴とする糸巻取機。
【請求項14】
給糸ボビンを保持可能なボビン保持装置と、
前記給糸ボビンから解舒された糸を糸走行方向の下流へ案内してパッケージに巻き取る下流側ユニットと、
前記下流側ユニットを支持する部材であるベース体に対して取り付けられる基準部材と、
を備える巻取ユニットにおけるボビン保持装置の取付方法であって、
前記基準部材を、前記ベース体に対して移動可能な状態である調整状態にした上で、当該基準部材の位置を前記下流側ユニットに対して合わせる第1工程と、
前記基準部材を、前記ベース体に対して移動不能な状態である固定状態に切り換える第2工程と、
前記基準部材に対して前記ボビン保持装置を固定する第3工程と、
を含むことを特徴とするボビン保持装置の取付方法。
【請求項1】
給糸ボビンを保持可能なボビン保持装置と、
前記給糸ボビンから解舒された糸を糸走行方向の下流へ案内してパッケージに巻き取る下流側ユニットと、
前記下流側ユニットを支持する部材であるベース体に対して取り付けられる基準部材と、
を備え、
前記基準部材は、前記ベース体に対して移動可能な状態である調整状態と、前記ベース体に対して移動不能な状態である固定状態と、を切換可能に構成しており、
前記ボビン保持装置は、前記基準部材に対する取付け及び取外しが可能であり、当該ボビン保持装置が前記基準部材に取り付けられる際は、前記基準部材に対する位置がただ1つに定まるように当該基準部材に対して固定されることを特徴とする巻取ユニット。
【請求項2】
請求項1に記載の巻取ユニットであって、
前記ベース体及び前記基準部材のうち少なくとも一方には孔が設けられ、この孔にボルトを差し込むことで前記基準部材が前記ベース体に取り付けられており、
前記ボルトの軸部と前記孔との間には遊びが設けられていることを特徴とする巻取ユニット。
【請求項3】
請求項1又は2に記載の巻取ユニットであって、
前記下流側ユニットは、前記給糸ボビンからの糸の解舒を補助する解舒補助装置を備え、
前記基準部材は、前記ボビン保持装置に保持される前記給糸ボビンの中心位置に対応した目印を有していることを特徴とする巻取ユニット。
【請求項4】
請求項3に記載の巻取ユニットであって、
前記目印は、前記基準部材に形成された凹部又は貫通孔であることを特徴とする巻取ユニット。
【請求項5】
請求項4に記載の巻取ユニットであって、
前記解舒補助装置は、前記給糸ボビンの糸が解舒される解舒位置において形成されるバルーンの大きさを調整する円筒形状のバルーン規制部を備え、
前記調整状態において、前記基準部材の位置は、前記バルーン規制部の軸線の延長線上に前記目印が位置するように調整されることを特徴とする巻取ユニット。
【請求項6】
請求項1又は2に記載の巻取ユニットであって、
前記下流側ユニットは、前記給糸ボビンからの糸の解舒を補助する解舒補助装置を備え、
前記基準部材は、前記ボビン保持装置に保持される前記給糸ボビンの中心位置に対応した位置に、目印となる基準冶具を取付可能であることを特徴とする巻取ユニット。
【請求項7】
請求項6に記載の巻取ユニットであって、
前記解舒補助装置は、前記給糸ボビンの糸が解舒される解舒位置において形成されるバルーンの大きさを調整する円筒形状のバルーン規制部を備え、
前記基準冶具は真っ直ぐに細長く形成され、
前記調整状態において、前記基準部材の位置は、当該基準部材に前記基準冶具を取り付けた上で、当該基準冶具の中心と前記バルーン規制部の軸線とが一致するように調整されることを特徴とする巻取ユニット。
【請求項8】
請求項1から6までの何れか一項に記載の巻取ユニットであって、
前記基準部材は板状に形成されていることを特徴とする巻取ユニット。
【請求項9】
請求項1から8までの何れか一項に記載の巻取ユニットであって、
前記基準部材は、当該基準部材に前記ボビン保持装置が取り付けられるまでの間、当該ボビン保持装置の重量を一時的に支持する重量支持部を有することを特徴とする巻取ユニット。
【請求項10】
請求項9に記載の巻取ユニットであって、
前記ボビン保持装置は、その一端が前記基準部材に対して片持ち状に取り付けられることを特徴とする巻取ユニット。
【請求項11】
請求項1から10までの何れか一項に記載の巻取ユニットであって、
前記ボビン保持装置には、供給された前記給糸ボビンの位置合わせ、当該給糸ボビンの保持、及び当該給糸ボビンの排出のうち少なくとも何れかのために動力を供給する駆動源が配置されていることを特徴とする巻取ユニット。
【請求項12】
請求項1から11までの何れか一項に記載の巻取ユニットを複数並べて配置したことを特徴とする糸巻取機。
【請求項13】
請求項12に記載の糸巻取機であって、
前記ベース体は、複数の巻取ユニットに跨るように配置されて、それぞれの前記巻取ユニットの前記下流側ユニットを支持するベース部材であり、
1つの前記ベース部材に複数の前記巻取ユニットの前記基準部材が取り付けられることを特徴とする糸巻取機。
【請求項14】
給糸ボビンを保持可能なボビン保持装置と、
前記給糸ボビンから解舒された糸を糸走行方向の下流へ案内してパッケージに巻き取る下流側ユニットと、
前記下流側ユニットを支持する部材であるベース体に対して取り付けられる基準部材と、
を備える巻取ユニットにおけるボビン保持装置の取付方法であって、
前記基準部材を、前記ベース体に対して移動可能な状態である調整状態にした上で、当該基準部材の位置を前記下流側ユニットに対して合わせる第1工程と、
前記基準部材を、前記ベース体に対して移動不能な状態である固定状態に切り換える第2工程と、
前記基準部材に対して前記ボビン保持装置を固定する第3工程と、
を含むことを特徴とするボビン保持装置の取付方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−67476(P2013−67476A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−206513(P2011−206513)
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]