
形態変形玩具の腕部収納構造及び形態変形玩具
【課題】従来に無い変形過程を楽しむことができる形態変形玩具を提供する。
【解決手段】車輪7のホイール53に、ホイールカバー61によって塞がれる収納凹部54を設ける。収納凹部54内に変形可能に構成された腕部71と手部75とを収納する。腕部71と手部75とは、形態変形玩具が移動玩具のときにはホイールカバー61によって塞がれた収納凹部54内に腕部71が縮んだ状態で収納される。形態変形玩具がロボット玩具のときには、収納凹部54から外部に出されて腕部71が延びた状態になる。
【解決手段】車輪7のホイール53に、ホイールカバー61によって塞がれる収納凹部54を設ける。収納凹部54内に変形可能に構成された腕部71と手部75とを収納する。腕部71と手部75とは、形態変形玩具が移動玩具のときにはホイールカバー61によって塞がれた収納凹部54内に腕部71が縮んだ状態で収納される。形態変形玩具がロボット玩具のときには、収納凹部54から外部に出されて腕部71が延びた状態になる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、形態変形玩具及びその腕部を収納する腕部収納構造に関するものである。
【背景技術】
【0002】
実公平3ー52555号公報(特許文献1)には、ロボット玩具に変形する前の形態において、下腕部が外部から見えないように下腕部を収納する変形ロボット玩具の腕部収納構造が示されている。この腕部収納構造では、上腕部を構成する部品の内部に下腕部を構成する部品を収納し、これを変形前の玩具の胴部に取り付けている。
【0003】
また実公平4−20478号公報(特許文献2)には、移動玩具が人形ロボット玩具の腕部を構成するように変形する形態変形玩具における腕部収納構造が示されている。この腕部収納構造では、腕部が折り曲げられた状態で収納凹部内に収納されている。移動玩具の状態で、折り曲げられた腕部の一部が、移動玩具の外観の一部を構成している。
【特許文献1】実公平3−52555号公報 第1図〜第4図
【特許文献2】実公平4−20478号公報 第1図
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら特許文献1及び2に示された形態変形玩具では、ロボット玩具に変形する前の態様で腕部全体を外部から見えない状態で収納することができない。そのため腕部の展開構造を容易に想像することができ、予想外の形態変形を期待することができない問題があった。
【0005】
本発明の目的は、従来に無い変形過程を楽しむことができる形態変形玩具及びその腕部収納構造を提供することにある。
【0006】
本発明の他の目的は、移動玩具が予想外の形態変形をする形態変形玩具の腕部収納構造を提供することにある。
【0007】
本発明の別の目的は、移動玩具の車輪がロボット玩具の腕部に変形するという従来にない変形過程を楽しむことができる形態変形玩具の腕部収納構造を提供することにある。
【課題を解決するための手段】
【0008】
本発明は、三輪車等の車輪を有する移動玩具から腕部と手部とを有するロボット玩具に変形する形態変形玩具の腕部収納構造を対象とする。本願明細書において、「車輪」とはとは、実際に動く車輪の他に、実際の車輪を模したもので実際には動かない車輪を含むものである。したがって本願明細書において、「車輪を有する移動玩具」とは、実際に車輪が回転して移動する乗り物玩具等の移動玩具の他に、実際には車輪が回転しない乗り物玩具等を模した静止または置物タイプの移動玩具を含むものである。本発明では、車輪のホイールに、ホイールカバーによって塞がれる収納凹部を設ける。そして収納凹部内に変形可能に構成された腕部と該腕部の先端に設けられた手部とを収納する。腕部と手部とを、形態変形玩具が移動玩具のときにはホイールカバーによって塞がれた収納凹部内に腕部が縮んだ状態で収納され、形態変形玩具がロボット玩具のときには、収納凹部から外部に出されて腕部が延びた状態になるように構成する。本発明のように車輪が腕部に変形するという構造は、従来にないものであり、本発明の形態変形玩具によれば、従来にない変形過程を楽しむことができる。また移動玩具の一部を構成する車輪の予想外の変形により、形態変形玩具に対する興味を高めることができる。
【0009】
ホイールカバーを腕部の可動部に固定すると、変形過程においてホイールカバーを別に取り外しておく必要がないだけでなく、ホイールカバーをロボット玩具の腕のガード(楯)として使用することができる。また腕部を収納する過程で腕部を縮める動作をすることにより、ホイールカバーを適切な位置に位置決めすることができるので、腕部を収納凹部に収納する際の作業が容易になる。
【0010】
またホイールカバーを、複数の部品に分割可能に構成してもよい。この場合には、複数の部品のうち一部の部品を腕部に固定し、残りの部品を一部の部品と組み合わされた第1の位置と一部の部品から離れた第2の位置との間を任意に変位可能に一部の部品に取り付けられた支持機構によって支持する。このようにすると腕部が収納凹部の外に出された状態で、ホイールカバー自体も変形するため、更に形態の変形を楽しむことができる。
【0011】
収納凹部から腕部を外部に出すための構造は任意である。例えば、車輪を支持する車軸を、形態変形玩具が移動玩具のときには一方の位置(以下後退位置と言う)にあり且つ形態変形玩具がロボット玩具のときには他方の位置(以下前進位置と言う)にあるように、形態変形玩具の一部に変位可能に支持する。その上で車軸の先端に腕部を取り付ける。そして車軸が前進位置にあり且つホイールを車軸の基部側に変位させた状態にあるときに、腕部と手部とが収納凹部の外部に出るようにする。このようにすると車軸の位置の変位とホイールの位置の変位とにより腕部と手部とをホイールの収納凹部の外部に出すことができるので、腕部と手部の引き出しが簡単になる。
【0012】
また形態変形玩具がロボット玩具になっているときに胴部を構成する部品に一端が回転可能に支持された回動リンクの他端に、回動リンクが延びる方向と直交する方向にスライド可能に軸部を支持する。そしてこの回動リンクを、形態変形玩具が移動玩具のときには、車軸が後退位置にスライドし得る第1の回動位置にあり、形態変形玩具がロボット玩具になっているときには、車軸の基部がロボット玩具の胴部を構成する部品と当接状態になって車軸が前進位置にある第2の回動位置に位置するように構成する。このようにすると回動リンクの回動位置を選択することにより、軸部の位置を決定することができるので、変形過程で無理なく腕部と手部とをホイールの収納凹部から出すことができる。また回動リンクを第2の回動位置に位置決めしている状態では、胴部が軸部の動きを規制するため、腕部が収納凹部内に戻ってしまうことを阻止することができる。なおこのようにした場合に、車軸の基部には嵌合用凹部を形成し、胴部を構成する部品には回動リンクが第2の回動位置にあるときに、嵌合用凹部が嵌合される嵌合用凸部を形成しておくのが好ましい。このようにすると嵌合用凹部と嵌合用凸部との嵌合によって車軸の位置決めが図られることになり、車軸の変位を更に確実に阻止することができて、腕部と手部とが収納凹部内に戻ることを確実に阻止することができる。
【0013】
本発明の腕部収納構造を備えた三輪タイプの形態変形玩具では、先端部と基部とをそれぞれ有する一対のフロントフォークと、一対のフロントフォークの先端部間に構成された前輪と、一対のフロントフォークの基部がそれぞれ取り付けられた本体フレームと、本体フレームに取り付けられたフロントカバー及びリアカバーと、本体フレームに直接またはリアカバーを介して本体フレームに間接的に取り付けられた一対の後輪とを有する移動玩具から一対の腕部と手部とを有するロボット玩具に変形する。この場合、後輪のホイールに、それぞれホイールカバーによって塞がれる収納凹部を設ける。そして収納凹部内に変形可能に構成された腕部と手部とを収納する。この場合も、腕部と手部とは、形態変形玩具が移動玩具のときにはホイールカバーによって塞がれた収納凹部内に腕部が縮んだ状態で収納され、形態変形玩具がロボット玩具のときには、収納凹部から外部に出されて腕部が延びた状態になるように構成する。
【0014】
この形態変形玩具では、一対のフロントフォークによりロボット玩具の一対の脚部を構成する。また前輪を一対のフロントフォークの先端部に取り付けられる一対の分割前輪構成部材により構成する。そして一対の分割前輪構成部材により人形ロボット玩具の一対の足部をそれぞれ構成する。さらに本体フレーム、フロントカバー及びリアカバーによってロボット玩具の一対の脚部よりも上に位置するロボット玩具本体部を構成する。後輪の車軸が形態変形玩具が移動玩具のときには後退位置にあり且つ形態変形玩具がロボット玩具のときには前進位置にあるように、形態変形玩具がロボット玩具に変形しているときのロボット玩具本体に後輪の車軸を変位可能に支持する。そして車軸の先端に腕部を取り付けると、車軸が前進位置にあるときに腕部と手部とが収納凹部の外部に出るようになる。したがって車軸の位置を変えることによって、腕部と手部とを簡単にホイールの収納凹部から出すことができる。
【0015】
車輪のホイールは、車軸が前進位置にあるときに回動リンクが収納されるリンク収納凹部を備えた構造にすることができる。回動リンクをリンク収納凹部に収納すれば、車輪がロボット玩具本体に近づくため、車輪がロボット玩具の肩部を構成することになり、ユニークな形態変形玩具を提供することができる。
【発明の効果】
【0016】
本発明によれば、従来にない変形過程を楽しむことができる上、移動玩具の一部を構成する車輪を予想外の腕部と手部とを含む形態に変形するができるので、形態変形玩具の愛好者の興味を大幅に高めることができる。
【発明を実施するための最良の形態】
【0017】
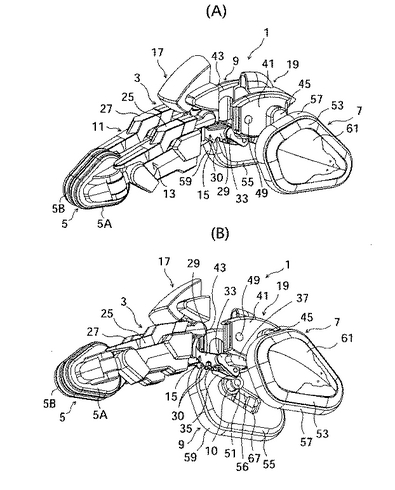
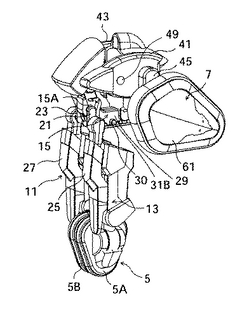
以下図面を参照して本発明の実施の形態を詳細に説明する。図1(A)及び(B)は、本発明の形態変形玩具1を異なる角度から見たときの斜視図である。この形態変形玩具1は、三輪車玩具(移動玩具)3の形態から、三輪車の一部を分解して変形させて人形型のロボット玩具(図9)に変形するものである。これらの図において、三輪車玩具(移動玩具)3は、1本の前輪5と、2本の後輪7及び9と、先端部と基部とをそれぞれ有する一対のフロントフォーク11及び13と、一対のフロントフォーク11及び13の基部がそれぞれ取り付けられた本体フレーム15と、本体フレーム15に取り付けられたフロントカバー17及びリアカバー19とを有している。前輪5は、一対のフロントフォーク11及び13の先端部間に構成されている。前輪5は、一対のフロントフォーク11及び13の先端部にそれぞれ取り付けられる一対の分割前輪構成部材5A及び5Bにより構成されている。一対の分割前輪構成部材5A及び5Bは、それぞれ二等辺三角形の角部に丸みをつけた輪郭形状を有しており、対面する分割面が後にロボット玩具の足部の裏面を構成する。一対の分割前輪構成部材5A及び5Bと一対のフロントフォーク11及び13の先端部とを連結する連結機構は、一対の分割前輪構成部材5A及び5Bが外側に向かって開き且つフロントフォーク11及び13を中心にして回動し得るような構造を有している。したがって一対の分割前輪構成部材5A及び5Bによりロボット玩具の一対の足部がそれぞれ構成される。
【0018】
一対のフロントフォーク11及び13の基部は、図4に示されるように、一端が本体フレーム15に回動自在に取り付けられた回動リンク21及び23の他端に回動自在に取り付けられている。そして一対のフロントフォーク11及び13は、長手方向にスライド可能な前方カバー25及び27をそれぞれ備えている。後に説明するようにこの前方カバー部材25及び27が上方にスライドすることにより、前方カバー部材25及び27と一対の分割前輪構成部材5A及び5Bとの係合が解除されて、一対の分割前輪構成部材5A及び5Bの回動が可能になる。図1に示された状態では、回動リンク21及び23が時計回り方向に回転して本体フレーム15の立ち上がり部15Aに沿った位置にある。したがってフロントフォーク11及び13の基部が、本体フレーム15側に引き寄せられた状態になっている。
【0019】
本体フレーム15は、L字状に曲がった前方フレーム29と、この前方フレーム29の前方端部に揺動可能に取り付けられた第1の留め具31[図2(A)]と、前方フレーム29の後方端部に回動自在に取り付けられた後方フレーム33と、後方フレーム33に揺動可能に取り付けられた第2の留め具35と、前方フレーム29に回動自在に取り付けられて後方フレーム33にリアカバー19を連結する連結フレーム37とから構成されている。図2(A)に示されるように、第1の留め具31は、留め具本体31Aの先端両側に突出する一対の突起を備えた構造を有している。そして三輪車玩具の状態のときには、留め具本体31Aが前方側に回動して、一対のフロントフォーク11及び13の内側壁部にそれぞれ設けた一対の嵌合孔に一対の突起31B(図4参照)を嵌合させている。これにより一対のフロントフォーク11及び13が、本体フレーム15から前方側に移動するのが阻止されている。この嵌合が解除して、一対のフロントフォーク11及び13に前方側に向かう力を加えると、前述の回動リンク21及び23が反時計回り方向に回転して図4に示すように回動リンク21及び23と一対のフロントフォーク11及び13とが直線状に並んだ状態になる。前方フレーム29の下側部分には、ロボット玩具に変形する際に、第1の留め具31の先端に設けた一対の突起31B(図4参照)を嵌合しておくための一対の嵌合用凹部30が形成されている。図2(B)に示すように、第2の留め具35の先端部のフック部36が前方フレーム29に設けた係合用凹部39に係合した状態[図1(B)及び図2(A)に示す状態]では、後方フレーム33が前方フレーム29に対して回動することが阻止されている。またこの状態では、図2(A)に示すように、第2の留め具35に連結フレーム37が係合しており、連結フレーム37が第2の留め具35に対して回動することが阻止されている。
【0020】
リアカバー19の両側カバー部41及び43[図2(A)及び図3(B)参照]には、一対の回動リンク45及び47[図3(B)参照]の一端が回動自在に取り付けられている。一対の回動リンク45及び47は、両側カバー部41及び43の外壁部に沿って所定の角度範囲内で回動または揺動する。回動リンク45及び47の他端(先端)には、後輪7及び9の車軸8及び10[図2(A)及び図3(B)参照]が回動自在且つ軸線方向に摺動自在に支持されている。図1乃至図3に示す状態では、車輪7及び9の車軸8及び10は、後退位置にある。なお形態変形玩具が三輪車玩具(移動玩具)からロボット玩具に変形する際には、この後退位置(一方の位置)から軸線方向外側の前進位置(他方の位置)に移動することになる。
【0021】
図1乃至図3に示す状態では、一対の回動リンク45及び47は、車軸8及び10が前述の後退位置にスライドし得る第1の回動位置にある。ロボット玩具に変形する場合には、一対のフロントフォーク11及び13が位置する前方側に回動して、両側カバー部41及び43の外壁部に設けた嵌合用凸部49が位置する側に回動する。車軸8及び10の基部には、嵌合用凸部49と嵌合する嵌合用凹部51がそれぞれ形成されている。嵌合用凸部49と嵌合用凹部51とが嵌合した状態にあるときが、回動リンク45及び47が第2の回動位置にあるときである。回動リンク45及び47が第2の位置にあるときには、車軸8及び10は両側カバー部41及び43の外壁部に接触した状態にあり、前述の後退位置から軸線方向外側に移動して前進位置に置かれることになる。車軸8及び10が前進位置に置かれたときの状態については後に説明する。
【0022】
図示していないが、両側カバー部41及び43の外壁部上には、一対の回動リンク45及び47が第1の回動位置から第2の回動位置に向かって回動する際に、一対の回動リンク45及び47が乗り越えなければならない僅かな高さの突起が一体に設けられている。回動リンク45及び47がこの突起を乗り越えた状態で、回動リンク45及び47の外面とこの突起が係合して、回動リンク45及び47が第1の回動位置に自然に戻ることが阻止される。
【0023】
車輪7及び9は、変形した菱形の角部に丸みを付けた形状のホイール53及び55の外周に回転ベルト57及び59が回転自在に取り付けられた構造を有している。回転ベルト57及び59の回転をスムーズにするためにホイールの外周部に複数のローラが配置されている。後に詳しく説明するように、ホイール53及び55の表面側の内部にはロボット玩具の腕部と手部とを収納する収納凹部54(図8〜図9)及び56(図1〜図3)が形成されており、この収納凹部54及び56の開口部がホイールカバー61及び63[図8]によって塞がれた構造を有している。またホイール53及び55の裏面側の内部には、後に詳しく説明するように、ロボット玩具に変形する際に、回動リンク45及び47がそれぞれ収納されるリンク収納凹部65及び67が形成されている。なお本実施の形態では、収納凹部54とリンク収納凹部65とは連続して、収納凹部56とリンク収納凹部67も連続している。なおホイール53及び55の内部構造と腕部と手部については、三輪車玩具からロボット玩具に変形していく過程を説明する途中で後に詳しく説明する。
【0024】
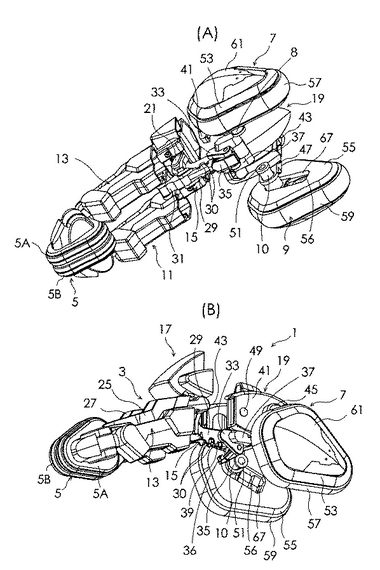
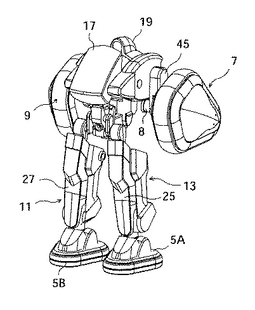
まず図1及び図2に示す三輪車玩具の状態から図9(B)に示すロボット玩具に変形するまでの過程を説明する。図2(B)に示すように、第2の留め具35を外して、前方フレーム29に対して後方フレーム33を回動し得る状態にする。そして後方フレーム33を図1及び図2に示す姿勢から上に持ち上げる方向(反時計回り方向)に回動させる。図3(A)及び(B)は、後方フレーム33を回動させた後の状態を示している。この状態では、図3(A)に示されるように、フロントカバー17とリヤカバー19とが合わさった状態になっている。そして図3(B)に示すように、第2の留め具35のフック36を前方フレームの後端部に設けた被嵌合部に嵌合する。この状態になると、第2の留め具35が後方フレーム33及び連結フレーム37の時計回り方向または後ろ方向への回動を阻止している。この状態から第1の留め具31[図2(A)]の突起31B(図4)を一対のフロントフォーク11及び13から外し、図4に示すように前方フレーム29に設けた嵌合用凹部30に突起31Bを嵌める。このようにすると、図4に示すように一対のフロントフォーク11及び13が連結されている回動リンク21及び23が回動して一対のフロントフォーク11及び13が前方側に移動した状態になる。
【0025】
図4の状態から一対のフロントフォーク11及び13に設けられた前方カバー25及び27を上方に持ち上げて、フロントフォーク11及び13と一対の分割前輪構成部材5A及び5Bとの係合を解除する。この係合の解除により、一対の分割前輪構成部材5A及び5Bはフロントフォーク11及び13に対して自由に動くことができるようになる。そこで図5に示すように、一対の分割前輪構成部材5A及び5Bの合わせ面が設置面と接触するように一対の分割前輪構成部材5A及び5Bを回動する。その後、前方カバー25及び27を下に下げて前方カバー部材25及び27とフロントフォーク11及び13とを係合する。これによってフロントフォーク11及び13が、分割前輪構成部材5A及び5B上にぐらつき無くしっかりと立つ。
【0026】
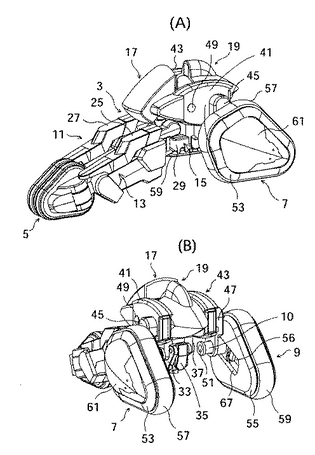
次に図6(A)に示すように、後輪7を外側方向(回動リンク45から離れる方向)に移動させる。このとき、回動リンク45に設けた突起46が、ホイール53の内壁部に設けた図示しない嵌合用孔部から抜かれることになる。この突起46と図示しない嵌合用孔部との嵌合によって後輪7のホイール53が車軸を中心にして回動するのが阻止されている。図6(A)には示していない車軸8は、後退位置から前進位置に移動することになる。他方の後輪9についても上記と同様の動作を行う。そして図6(A)の状態から車輪7を反時計回り方向に回転させて、図6(B)に示す状態を作る。図6(B)には、後輪9のホイール55の内壁面に設けられた嵌合用孔部50が示されている。この嵌合用孔部50に回動リンク47に設けた突起48が嵌合されていた。
【0027】
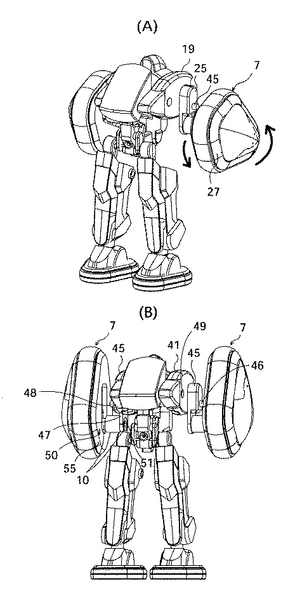
次に図6(B)に示す状態から、図7に示すように第1の回動位置にある回動リンク45及び47を第2の回動位置に回動させる。すなわち回動リンク45及び47を時計回り方向に回転させて、車軸8及び10の基部に設けた嵌合用凹部51と両側カバー部41及び43の外壁部に設けた嵌合用凸部49とを嵌合させる。これによって回動リンク45が第2の回動位置に保持される。
【0028】
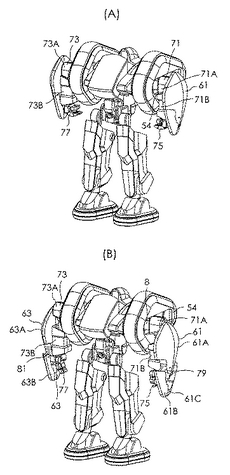
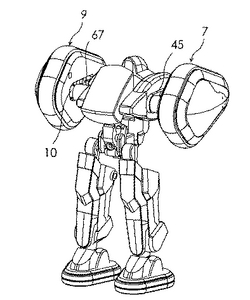
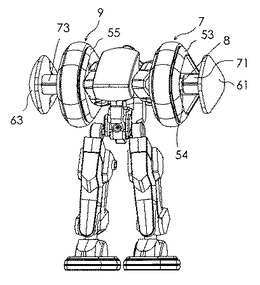
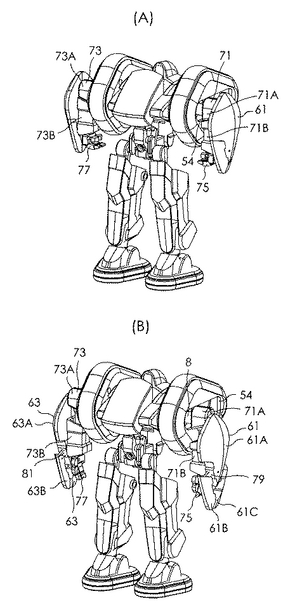
次に図8に示すように、車輪7及び9のホイール53及び55を両側カバー部41及び43または車軸8及び10の基部側に向かって移動させ、ホイール53及び55に設けたリンク収納凹部65及び67内に回動リンク45及び47を収納する。図8に示されるように、ホイール53及び55が両側カバー部41及び43と接触した状態になると、後輪7及び9内に収納された左右の腕部71及び73と手部75及び77[図9(A)]とが収納凹部54及び56から外部に出る。図8に示した状態では、腕部71及び73は縮んだ状態にある。図8に示す状態からホイールカバー61及び63を時計回り方向に回転させた状態が図9(A)に示されている。そして腕部71及び73を延ばした状態が図9(B)に示されている。
【0029】
ホイールカバー61及び63は、それぞれ腕部71及び73の可動部71B及び73Bに固定されている。ホイールカバー61及び63は、それぞれ3つの部品61A乃至61Cに分割可能に構成されている。部品61A及び63Aは、腕部71及び73の固定部品71A及び73Aに固定され、残りの2つの部品61B乃至63Cは部品61A及び63Aと組み合わされた第1の位置と部品61A及び63Aから離れた第2の位置との間を任意に変位可能に部品61A及び63Aに取り付けられた伸縮機能を有する支持機構79及び81によって支持されている。本実施の形態によれば、このような構成によって手部75及び77の外側に大きな爪の形をした武器が取り付けられた状態になる。
【0030】
なおこの形態変形玩具1では、一対のフロントフォーク11及び13によりロボット玩具の一対の脚部が構成されている。そして一対の分割前輪構成部材5A及び5Bにより人形ロボット玩具の一対の足部がそれぞれ構成されている。さらに本体フレーム15、フロントカバー17及びリアカバー19によってロボット玩具の一対の脚部よりも上に位置するロボット玩具本体部が構成されている。
【0031】
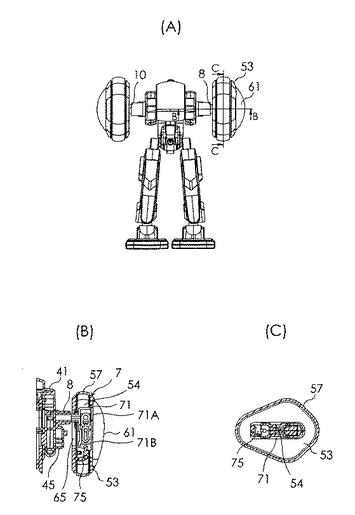
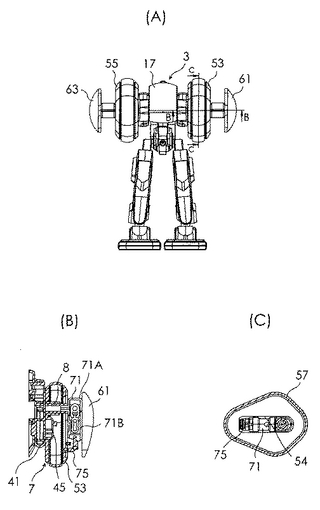
図10(B)及び図10(C)には、図10(A)のB−B線断面図及び図10(A)のC−C線断面図を示してある。そして図11(B)及び(C)には、図11(A)のB−B線断面図及び図11(A)のC−C線断面図を示してある。図10(A)は図7の状態と同じであり、図11(A)の状態は図8の状態と同じである。図10及び図11から明らかなように、車軸8が前進位置にあっても、ホイール53がカバー部材41側(車軸8の基部側)に移動しない限り、腕部71がホイール53の内部から外部に出ることはない。また腕部71の固定部71Aは、車軸8の端部に回動可能に取り付けられている。また腕部71の固定部71Aと可動部71Bとは、スライド機構を用いて伸縮可能に連結されている。
【0032】
ロボット玩具から三輪車玩具に変形する場合には、上記の手順と逆の手順で変形を行えばよい。
【0033】
上記実施の形態は、三輪車玩具からロボット玩具に変形する形態変形玩具に本発明を適用したものである。しかしその他の車輪を有する移動玩具からロボット玩具に変形する形態変形玩具にも本発明は当然にして適用できるのは勿論である。
【0034】
また上記実施の形態では車輪の輪郭形状が非円形形状を呈しているが、車輪の形状は通常の円形形状であってもよいのは勿論である。
【図面の簡単な説明】
【0035】
【図1】(A)及び(B)は、それぞれ本発明の形態変形玩具の実施の形態の一例を角度を変えて見た状態を示す斜視図である。
【図2】(A)は本発明の形態変形玩具の実施の形態の一例を角度を変えて見た状態を示す斜視図であり、(B)は第2の留め具を外した状態を示す形態変形玩具の斜視図である。
【図3】(A)及び(B)は、それぞれ形態変形途中の形態変形玩具の斜視図である。
【図4】形態変形途中の形態変形玩具の斜視図である。
【図5】形態変形途中の形態変形玩具の斜視図である。
【図6】(A)及び(B)は、それぞれ形態変形途中の形態変形玩具の斜視図である。
【図7】形態変形途中の形態変形玩具の斜視図である。
【図8】形態変形途中の形態変形玩具の斜視図である。
【図9】(A)は形態変形途中の形態変形玩具の斜視図であり、(B)は変形が完了した形態変形玩具の斜視図である。
【図10】(A)は図7に示された状態における形態変形玩具の正面図であり、(B)は図10(A)のB−B線断面図であり、(C)は図10(A)のC−C線断面図である。
【図11】(A)は図8に示された状態における形態変形玩具の正面図であり、(B)は図11(A)のB−B線断面図であり、(C)は図11(A)のC−C線断面図である。
【符号の説明】
【0036】
1 形態変形玩具
3 三輪車玩具(移動玩具)
5 前輪
5A,5B 分割前輪構成部材
7,9 後輪
11,13 フロントフォーク
15 本体フレーム
17 フロントカバー
19 リアカバー
31 第1の留め具
35 第2の留め具
41,43 カバー部
45,47 回動リンク
49 嵌合用凸部
51 嵌合用凹部
53,55 ホイール
54,56 収納凹部
61,63 ホイールカバー
65,67 リンク収納凹部
71,73 腕部
75,77 手部
【技術分野】
【0001】
本発明は、形態変形玩具及びその腕部を収納する腕部収納構造に関するものである。
【背景技術】
【0002】
実公平3ー52555号公報(特許文献1)には、ロボット玩具に変形する前の形態において、下腕部が外部から見えないように下腕部を収納する変形ロボット玩具の腕部収納構造が示されている。この腕部収納構造では、上腕部を構成する部品の内部に下腕部を構成する部品を収納し、これを変形前の玩具の胴部に取り付けている。
【0003】
また実公平4−20478号公報(特許文献2)には、移動玩具が人形ロボット玩具の腕部を構成するように変形する形態変形玩具における腕部収納構造が示されている。この腕部収納構造では、腕部が折り曲げられた状態で収納凹部内に収納されている。移動玩具の状態で、折り曲げられた腕部の一部が、移動玩具の外観の一部を構成している。
【特許文献1】実公平3−52555号公報 第1図〜第4図
【特許文献2】実公平4−20478号公報 第1図
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら特許文献1及び2に示された形態変形玩具では、ロボット玩具に変形する前の態様で腕部全体を外部から見えない状態で収納することができない。そのため腕部の展開構造を容易に想像することができ、予想外の形態変形を期待することができない問題があった。
【0005】
本発明の目的は、従来に無い変形過程を楽しむことができる形態変形玩具及びその腕部収納構造を提供することにある。
【0006】
本発明の他の目的は、移動玩具が予想外の形態変形をする形態変形玩具の腕部収納構造を提供することにある。
【0007】
本発明の別の目的は、移動玩具の車輪がロボット玩具の腕部に変形するという従来にない変形過程を楽しむことができる形態変形玩具の腕部収納構造を提供することにある。
【課題を解決するための手段】
【0008】
本発明は、三輪車等の車輪を有する移動玩具から腕部と手部とを有するロボット玩具に変形する形態変形玩具の腕部収納構造を対象とする。本願明細書において、「車輪」とはとは、実際に動く車輪の他に、実際の車輪を模したもので実際には動かない車輪を含むものである。したがって本願明細書において、「車輪を有する移動玩具」とは、実際に車輪が回転して移動する乗り物玩具等の移動玩具の他に、実際には車輪が回転しない乗り物玩具等を模した静止または置物タイプの移動玩具を含むものである。本発明では、車輪のホイールに、ホイールカバーによって塞がれる収納凹部を設ける。そして収納凹部内に変形可能に構成された腕部と該腕部の先端に設けられた手部とを収納する。腕部と手部とを、形態変形玩具が移動玩具のときにはホイールカバーによって塞がれた収納凹部内に腕部が縮んだ状態で収納され、形態変形玩具がロボット玩具のときには、収納凹部から外部に出されて腕部が延びた状態になるように構成する。本発明のように車輪が腕部に変形するという構造は、従来にないものであり、本発明の形態変形玩具によれば、従来にない変形過程を楽しむことができる。また移動玩具の一部を構成する車輪の予想外の変形により、形態変形玩具に対する興味を高めることができる。
【0009】
ホイールカバーを腕部の可動部に固定すると、変形過程においてホイールカバーを別に取り外しておく必要がないだけでなく、ホイールカバーをロボット玩具の腕のガード(楯)として使用することができる。また腕部を収納する過程で腕部を縮める動作をすることにより、ホイールカバーを適切な位置に位置決めすることができるので、腕部を収納凹部に収納する際の作業が容易になる。
【0010】
またホイールカバーを、複数の部品に分割可能に構成してもよい。この場合には、複数の部品のうち一部の部品を腕部に固定し、残りの部品を一部の部品と組み合わされた第1の位置と一部の部品から離れた第2の位置との間を任意に変位可能に一部の部品に取り付けられた支持機構によって支持する。このようにすると腕部が収納凹部の外に出された状態で、ホイールカバー自体も変形するため、更に形態の変形を楽しむことができる。
【0011】
収納凹部から腕部を外部に出すための構造は任意である。例えば、車輪を支持する車軸を、形態変形玩具が移動玩具のときには一方の位置(以下後退位置と言う)にあり且つ形態変形玩具がロボット玩具のときには他方の位置(以下前進位置と言う)にあるように、形態変形玩具の一部に変位可能に支持する。その上で車軸の先端に腕部を取り付ける。そして車軸が前進位置にあり且つホイールを車軸の基部側に変位させた状態にあるときに、腕部と手部とが収納凹部の外部に出るようにする。このようにすると車軸の位置の変位とホイールの位置の変位とにより腕部と手部とをホイールの収納凹部の外部に出すことができるので、腕部と手部の引き出しが簡単になる。
【0012】
また形態変形玩具がロボット玩具になっているときに胴部を構成する部品に一端が回転可能に支持された回動リンクの他端に、回動リンクが延びる方向と直交する方向にスライド可能に軸部を支持する。そしてこの回動リンクを、形態変形玩具が移動玩具のときには、車軸が後退位置にスライドし得る第1の回動位置にあり、形態変形玩具がロボット玩具になっているときには、車軸の基部がロボット玩具の胴部を構成する部品と当接状態になって車軸が前進位置にある第2の回動位置に位置するように構成する。このようにすると回動リンクの回動位置を選択することにより、軸部の位置を決定することができるので、変形過程で無理なく腕部と手部とをホイールの収納凹部から出すことができる。また回動リンクを第2の回動位置に位置決めしている状態では、胴部が軸部の動きを規制するため、腕部が収納凹部内に戻ってしまうことを阻止することができる。なおこのようにした場合に、車軸の基部には嵌合用凹部を形成し、胴部を構成する部品には回動リンクが第2の回動位置にあるときに、嵌合用凹部が嵌合される嵌合用凸部を形成しておくのが好ましい。このようにすると嵌合用凹部と嵌合用凸部との嵌合によって車軸の位置決めが図られることになり、車軸の変位を更に確実に阻止することができて、腕部と手部とが収納凹部内に戻ることを確実に阻止することができる。
【0013】
本発明の腕部収納構造を備えた三輪タイプの形態変形玩具では、先端部と基部とをそれぞれ有する一対のフロントフォークと、一対のフロントフォークの先端部間に構成された前輪と、一対のフロントフォークの基部がそれぞれ取り付けられた本体フレームと、本体フレームに取り付けられたフロントカバー及びリアカバーと、本体フレームに直接またはリアカバーを介して本体フレームに間接的に取り付けられた一対の後輪とを有する移動玩具から一対の腕部と手部とを有するロボット玩具に変形する。この場合、後輪のホイールに、それぞれホイールカバーによって塞がれる収納凹部を設ける。そして収納凹部内に変形可能に構成された腕部と手部とを収納する。この場合も、腕部と手部とは、形態変形玩具が移動玩具のときにはホイールカバーによって塞がれた収納凹部内に腕部が縮んだ状態で収納され、形態変形玩具がロボット玩具のときには、収納凹部から外部に出されて腕部が延びた状態になるように構成する。
【0014】
この形態変形玩具では、一対のフロントフォークによりロボット玩具の一対の脚部を構成する。また前輪を一対のフロントフォークの先端部に取り付けられる一対の分割前輪構成部材により構成する。そして一対の分割前輪構成部材により人形ロボット玩具の一対の足部をそれぞれ構成する。さらに本体フレーム、フロントカバー及びリアカバーによってロボット玩具の一対の脚部よりも上に位置するロボット玩具本体部を構成する。後輪の車軸が形態変形玩具が移動玩具のときには後退位置にあり且つ形態変形玩具がロボット玩具のときには前進位置にあるように、形態変形玩具がロボット玩具に変形しているときのロボット玩具本体に後輪の車軸を変位可能に支持する。そして車軸の先端に腕部を取り付けると、車軸が前進位置にあるときに腕部と手部とが収納凹部の外部に出るようになる。したがって車軸の位置を変えることによって、腕部と手部とを簡単にホイールの収納凹部から出すことができる。
【0015】
車輪のホイールは、車軸が前進位置にあるときに回動リンクが収納されるリンク収納凹部を備えた構造にすることができる。回動リンクをリンク収納凹部に収納すれば、車輪がロボット玩具本体に近づくため、車輪がロボット玩具の肩部を構成することになり、ユニークな形態変形玩具を提供することができる。
【発明の効果】
【0016】
本発明によれば、従来にない変形過程を楽しむことができる上、移動玩具の一部を構成する車輪を予想外の腕部と手部とを含む形態に変形するができるので、形態変形玩具の愛好者の興味を大幅に高めることができる。
【発明を実施するための最良の形態】
【0017】
以下図面を参照して本発明の実施の形態を詳細に説明する。図1(A)及び(B)は、本発明の形態変形玩具1を異なる角度から見たときの斜視図である。この形態変形玩具1は、三輪車玩具(移動玩具)3の形態から、三輪車の一部を分解して変形させて人形型のロボット玩具(図9)に変形するものである。これらの図において、三輪車玩具(移動玩具)3は、1本の前輪5と、2本の後輪7及び9と、先端部と基部とをそれぞれ有する一対のフロントフォーク11及び13と、一対のフロントフォーク11及び13の基部がそれぞれ取り付けられた本体フレーム15と、本体フレーム15に取り付けられたフロントカバー17及びリアカバー19とを有している。前輪5は、一対のフロントフォーク11及び13の先端部間に構成されている。前輪5は、一対のフロントフォーク11及び13の先端部にそれぞれ取り付けられる一対の分割前輪構成部材5A及び5Bにより構成されている。一対の分割前輪構成部材5A及び5Bは、それぞれ二等辺三角形の角部に丸みをつけた輪郭形状を有しており、対面する分割面が後にロボット玩具の足部の裏面を構成する。一対の分割前輪構成部材5A及び5Bと一対のフロントフォーク11及び13の先端部とを連結する連結機構は、一対の分割前輪構成部材5A及び5Bが外側に向かって開き且つフロントフォーク11及び13を中心にして回動し得るような構造を有している。したがって一対の分割前輪構成部材5A及び5Bによりロボット玩具の一対の足部がそれぞれ構成される。
【0018】
一対のフロントフォーク11及び13の基部は、図4に示されるように、一端が本体フレーム15に回動自在に取り付けられた回動リンク21及び23の他端に回動自在に取り付けられている。そして一対のフロントフォーク11及び13は、長手方向にスライド可能な前方カバー25及び27をそれぞれ備えている。後に説明するようにこの前方カバー部材25及び27が上方にスライドすることにより、前方カバー部材25及び27と一対の分割前輪構成部材5A及び5Bとの係合が解除されて、一対の分割前輪構成部材5A及び5Bの回動が可能になる。図1に示された状態では、回動リンク21及び23が時計回り方向に回転して本体フレーム15の立ち上がり部15Aに沿った位置にある。したがってフロントフォーク11及び13の基部が、本体フレーム15側に引き寄せられた状態になっている。
【0019】
本体フレーム15は、L字状に曲がった前方フレーム29と、この前方フレーム29の前方端部に揺動可能に取り付けられた第1の留め具31[図2(A)]と、前方フレーム29の後方端部に回動自在に取り付けられた後方フレーム33と、後方フレーム33に揺動可能に取り付けられた第2の留め具35と、前方フレーム29に回動自在に取り付けられて後方フレーム33にリアカバー19を連結する連結フレーム37とから構成されている。図2(A)に示されるように、第1の留め具31は、留め具本体31Aの先端両側に突出する一対の突起を備えた構造を有している。そして三輪車玩具の状態のときには、留め具本体31Aが前方側に回動して、一対のフロントフォーク11及び13の内側壁部にそれぞれ設けた一対の嵌合孔に一対の突起31B(図4参照)を嵌合させている。これにより一対のフロントフォーク11及び13が、本体フレーム15から前方側に移動するのが阻止されている。この嵌合が解除して、一対のフロントフォーク11及び13に前方側に向かう力を加えると、前述の回動リンク21及び23が反時計回り方向に回転して図4に示すように回動リンク21及び23と一対のフロントフォーク11及び13とが直線状に並んだ状態になる。前方フレーム29の下側部分には、ロボット玩具に変形する際に、第1の留め具31の先端に設けた一対の突起31B(図4参照)を嵌合しておくための一対の嵌合用凹部30が形成されている。図2(B)に示すように、第2の留め具35の先端部のフック部36が前方フレーム29に設けた係合用凹部39に係合した状態[図1(B)及び図2(A)に示す状態]では、後方フレーム33が前方フレーム29に対して回動することが阻止されている。またこの状態では、図2(A)に示すように、第2の留め具35に連結フレーム37が係合しており、連結フレーム37が第2の留め具35に対して回動することが阻止されている。
【0020】
リアカバー19の両側カバー部41及び43[図2(A)及び図3(B)参照]には、一対の回動リンク45及び47[図3(B)参照]の一端が回動自在に取り付けられている。一対の回動リンク45及び47は、両側カバー部41及び43の外壁部に沿って所定の角度範囲内で回動または揺動する。回動リンク45及び47の他端(先端)には、後輪7及び9の車軸8及び10[図2(A)及び図3(B)参照]が回動自在且つ軸線方向に摺動自在に支持されている。図1乃至図3に示す状態では、車輪7及び9の車軸8及び10は、後退位置にある。なお形態変形玩具が三輪車玩具(移動玩具)からロボット玩具に変形する際には、この後退位置(一方の位置)から軸線方向外側の前進位置(他方の位置)に移動することになる。
【0021】
図1乃至図3に示す状態では、一対の回動リンク45及び47は、車軸8及び10が前述の後退位置にスライドし得る第1の回動位置にある。ロボット玩具に変形する場合には、一対のフロントフォーク11及び13が位置する前方側に回動して、両側カバー部41及び43の外壁部に設けた嵌合用凸部49が位置する側に回動する。車軸8及び10の基部には、嵌合用凸部49と嵌合する嵌合用凹部51がそれぞれ形成されている。嵌合用凸部49と嵌合用凹部51とが嵌合した状態にあるときが、回動リンク45及び47が第2の回動位置にあるときである。回動リンク45及び47が第2の位置にあるときには、車軸8及び10は両側カバー部41及び43の外壁部に接触した状態にあり、前述の後退位置から軸線方向外側に移動して前進位置に置かれることになる。車軸8及び10が前進位置に置かれたときの状態については後に説明する。
【0022】
図示していないが、両側カバー部41及び43の外壁部上には、一対の回動リンク45及び47が第1の回動位置から第2の回動位置に向かって回動する際に、一対の回動リンク45及び47が乗り越えなければならない僅かな高さの突起が一体に設けられている。回動リンク45及び47がこの突起を乗り越えた状態で、回動リンク45及び47の外面とこの突起が係合して、回動リンク45及び47が第1の回動位置に自然に戻ることが阻止される。
【0023】
車輪7及び9は、変形した菱形の角部に丸みを付けた形状のホイール53及び55の外周に回転ベルト57及び59が回転自在に取り付けられた構造を有している。回転ベルト57及び59の回転をスムーズにするためにホイールの外周部に複数のローラが配置されている。後に詳しく説明するように、ホイール53及び55の表面側の内部にはロボット玩具の腕部と手部とを収納する収納凹部54(図8〜図9)及び56(図1〜図3)が形成されており、この収納凹部54及び56の開口部がホイールカバー61及び63[図8]によって塞がれた構造を有している。またホイール53及び55の裏面側の内部には、後に詳しく説明するように、ロボット玩具に変形する際に、回動リンク45及び47がそれぞれ収納されるリンク収納凹部65及び67が形成されている。なお本実施の形態では、収納凹部54とリンク収納凹部65とは連続して、収納凹部56とリンク収納凹部67も連続している。なおホイール53及び55の内部構造と腕部と手部については、三輪車玩具からロボット玩具に変形していく過程を説明する途中で後に詳しく説明する。
【0024】
まず図1及び図2に示す三輪車玩具の状態から図9(B)に示すロボット玩具に変形するまでの過程を説明する。図2(B)に示すように、第2の留め具35を外して、前方フレーム29に対して後方フレーム33を回動し得る状態にする。そして後方フレーム33を図1及び図2に示す姿勢から上に持ち上げる方向(反時計回り方向)に回動させる。図3(A)及び(B)は、後方フレーム33を回動させた後の状態を示している。この状態では、図3(A)に示されるように、フロントカバー17とリヤカバー19とが合わさった状態になっている。そして図3(B)に示すように、第2の留め具35のフック36を前方フレームの後端部に設けた被嵌合部に嵌合する。この状態になると、第2の留め具35が後方フレーム33及び連結フレーム37の時計回り方向または後ろ方向への回動を阻止している。この状態から第1の留め具31[図2(A)]の突起31B(図4)を一対のフロントフォーク11及び13から外し、図4に示すように前方フレーム29に設けた嵌合用凹部30に突起31Bを嵌める。このようにすると、図4に示すように一対のフロントフォーク11及び13が連結されている回動リンク21及び23が回動して一対のフロントフォーク11及び13が前方側に移動した状態になる。
【0025】
図4の状態から一対のフロントフォーク11及び13に設けられた前方カバー25及び27を上方に持ち上げて、フロントフォーク11及び13と一対の分割前輪構成部材5A及び5Bとの係合を解除する。この係合の解除により、一対の分割前輪構成部材5A及び5Bはフロントフォーク11及び13に対して自由に動くことができるようになる。そこで図5に示すように、一対の分割前輪構成部材5A及び5Bの合わせ面が設置面と接触するように一対の分割前輪構成部材5A及び5Bを回動する。その後、前方カバー25及び27を下に下げて前方カバー部材25及び27とフロントフォーク11及び13とを係合する。これによってフロントフォーク11及び13が、分割前輪構成部材5A及び5B上にぐらつき無くしっかりと立つ。
【0026】
次に図6(A)に示すように、後輪7を外側方向(回動リンク45から離れる方向)に移動させる。このとき、回動リンク45に設けた突起46が、ホイール53の内壁部に設けた図示しない嵌合用孔部から抜かれることになる。この突起46と図示しない嵌合用孔部との嵌合によって後輪7のホイール53が車軸を中心にして回動するのが阻止されている。図6(A)には示していない車軸8は、後退位置から前進位置に移動することになる。他方の後輪9についても上記と同様の動作を行う。そして図6(A)の状態から車輪7を反時計回り方向に回転させて、図6(B)に示す状態を作る。図6(B)には、後輪9のホイール55の内壁面に設けられた嵌合用孔部50が示されている。この嵌合用孔部50に回動リンク47に設けた突起48が嵌合されていた。
【0027】
次に図6(B)に示す状態から、図7に示すように第1の回動位置にある回動リンク45及び47を第2の回動位置に回動させる。すなわち回動リンク45及び47を時計回り方向に回転させて、車軸8及び10の基部に設けた嵌合用凹部51と両側カバー部41及び43の外壁部に設けた嵌合用凸部49とを嵌合させる。これによって回動リンク45が第2の回動位置に保持される。
【0028】
次に図8に示すように、車輪7及び9のホイール53及び55を両側カバー部41及び43または車軸8及び10の基部側に向かって移動させ、ホイール53及び55に設けたリンク収納凹部65及び67内に回動リンク45及び47を収納する。図8に示されるように、ホイール53及び55が両側カバー部41及び43と接触した状態になると、後輪7及び9内に収納された左右の腕部71及び73と手部75及び77[図9(A)]とが収納凹部54及び56から外部に出る。図8に示した状態では、腕部71及び73は縮んだ状態にある。図8に示す状態からホイールカバー61及び63を時計回り方向に回転させた状態が図9(A)に示されている。そして腕部71及び73を延ばした状態が図9(B)に示されている。
【0029】
ホイールカバー61及び63は、それぞれ腕部71及び73の可動部71B及び73Bに固定されている。ホイールカバー61及び63は、それぞれ3つの部品61A乃至61Cに分割可能に構成されている。部品61A及び63Aは、腕部71及び73の固定部品71A及び73Aに固定され、残りの2つの部品61B乃至63Cは部品61A及び63Aと組み合わされた第1の位置と部品61A及び63Aから離れた第2の位置との間を任意に変位可能に部品61A及び63Aに取り付けられた伸縮機能を有する支持機構79及び81によって支持されている。本実施の形態によれば、このような構成によって手部75及び77の外側に大きな爪の形をした武器が取り付けられた状態になる。
【0030】
なおこの形態変形玩具1では、一対のフロントフォーク11及び13によりロボット玩具の一対の脚部が構成されている。そして一対の分割前輪構成部材5A及び5Bにより人形ロボット玩具の一対の足部がそれぞれ構成されている。さらに本体フレーム15、フロントカバー17及びリアカバー19によってロボット玩具の一対の脚部よりも上に位置するロボット玩具本体部が構成されている。
【0031】
図10(B)及び図10(C)には、図10(A)のB−B線断面図及び図10(A)のC−C線断面図を示してある。そして図11(B)及び(C)には、図11(A)のB−B線断面図及び図11(A)のC−C線断面図を示してある。図10(A)は図7の状態と同じであり、図11(A)の状態は図8の状態と同じである。図10及び図11から明らかなように、車軸8が前進位置にあっても、ホイール53がカバー部材41側(車軸8の基部側)に移動しない限り、腕部71がホイール53の内部から外部に出ることはない。また腕部71の固定部71Aは、車軸8の端部に回動可能に取り付けられている。また腕部71の固定部71Aと可動部71Bとは、スライド機構を用いて伸縮可能に連結されている。
【0032】
ロボット玩具から三輪車玩具に変形する場合には、上記の手順と逆の手順で変形を行えばよい。
【0033】
上記実施の形態は、三輪車玩具からロボット玩具に変形する形態変形玩具に本発明を適用したものである。しかしその他の車輪を有する移動玩具からロボット玩具に変形する形態変形玩具にも本発明は当然にして適用できるのは勿論である。
【0034】
また上記実施の形態では車輪の輪郭形状が非円形形状を呈しているが、車輪の形状は通常の円形形状であってもよいのは勿論である。
【図面の簡単な説明】
【0035】
【図1】(A)及び(B)は、それぞれ本発明の形態変形玩具の実施の形態の一例を角度を変えて見た状態を示す斜視図である。
【図2】(A)は本発明の形態変形玩具の実施の形態の一例を角度を変えて見た状態を示す斜視図であり、(B)は第2の留め具を外した状態を示す形態変形玩具の斜視図である。
【図3】(A)及び(B)は、それぞれ形態変形途中の形態変形玩具の斜視図である。
【図4】形態変形途中の形態変形玩具の斜視図である。
【図5】形態変形途中の形態変形玩具の斜視図である。
【図6】(A)及び(B)は、それぞれ形態変形途中の形態変形玩具の斜視図である。
【図7】形態変形途中の形態変形玩具の斜視図である。
【図8】形態変形途中の形態変形玩具の斜視図である。
【図9】(A)は形態変形途中の形態変形玩具の斜視図であり、(B)は変形が完了した形態変形玩具の斜視図である。
【図10】(A)は図7に示された状態における形態変形玩具の正面図であり、(B)は図10(A)のB−B線断面図であり、(C)は図10(A)のC−C線断面図である。
【図11】(A)は図8に示された状態における形態変形玩具の正面図であり、(B)は図11(A)のB−B線断面図であり、(C)は図11(A)のC−C線断面図である。
【符号の説明】
【0036】
1 形態変形玩具
3 三輪車玩具(移動玩具)
5 前輪
5A,5B 分割前輪構成部材
7,9 後輪
11,13 フロントフォーク
15 本体フレーム
17 フロントカバー
19 リアカバー
31 第1の留め具
35 第2の留め具
41,43 カバー部
45,47 回動リンク
49 嵌合用凸部
51 嵌合用凹部
53,55 ホイール
54,56 収納凹部
61,63 ホイールカバー
65,67 リンク収納凹部
71,73 腕部
75,77 手部
【特許請求の範囲】
【請求項1】
車輪を有する移動玩具から腕部と手部とを有するロボット玩具に変形する形態変形玩具の腕部収納構造であって、
前記車輪のホイールは、ホイールカバーによって塞がれる収納凹部を備え、
前記収納凹部内に変形可能に構成された腕部と該腕部の先端に設けられた手部とが収納されており、
前記腕部と前記手部とは、前記形態変形玩具が前記移動玩具のときには前記ホイールカバーによって塞がれた前記収納凹部内に前記腕部が縮んだ状態で収納され、前記形態変形玩具が前記ロボット玩具のときには、前記収納凹部から外部に出されて前記腕部が延びた状態になるように構成されていることを特徴とする形態変形玩具の腕部収納構造。
【請求項2】
前記ホイールカバーが前記腕部の可動部に固定されている請求項1に記載の形態変形玩具の腕部収納構造。
【請求項3】
前記ホイールカバーは、複数の部品に分割可能に構成され、
前記複数の部品のうち一部の部品は前記腕部に固定され、残りの部品は前記一部の部品と組み合わされた第1の位置と前記一部の部品から離れた第2の位置との間を任意に変位可能に前記一部の部品に取り付けられた支持機構によって支持されている請求項2に記載の形態変形玩具の腕部収納構造。
【請求項4】
前記車輪を支持する車軸は、前記形態変形玩具が前記移動玩具のときには一方の位置にあり且つ前記形態変形玩具が前記ロボット玩具のときには他方の位置にあるように、前記形態変形玩具の一部に変位可能に支持されており、
前記車軸の先端に前記腕部が取り付けられており、
前記車軸が前記他方の位置にあり且つ前記ホイールが前記車軸の基部側に変位した状態にあるときに前記腕部と前記手部とが前記収納凹部の外部に出ることを特徴とする請求項1、2または3に記載の形態変形玩具の腕部収納構造。
【請求項5】
前記車軸は前記形態変形玩具が前記ロボット玩具になっているときに胴部を構成する部品に一端が回転可能に支持された回動リンクの他端に前記回動リンクが延びる方向と直交する方向にスライド可能に支持されており、
前記回動リンクは、前記形態変形玩具が前記移動玩具のときには、前記車軸が前記一方の位置にスライドし得る第1の回動位置にあり、前記形態変形玩具が前記ロボット玩具になっているときには、前記車軸の基部が前記ロボット玩具の前記胴部を構成する部品と当接状態になって前記車軸が前記他方の位置にある第2の回動位置に位置するように構成されている請求項4に記載の形態変形玩具の腕部収納構造。
【請求項6】
前記車軸の前記基部には嵌合用凹部が形成されており、
前記胴部を構成する部品には前記回動リンクが前記第2の回動位置にあるときに、嵌合用凹部が嵌合される嵌合用凸部が形成されている請求項5に記載の形態変形玩具の腕部収納構造。
【請求項7】
前記車輪の前記ホイールは、前記車軸が前記他方の位置にあるときに前記回動リンクが収納されるリンク収納凹部を備えている請求項4に記載の形態変形玩具の腕部収納構造。
【請求項8】
先端部と基部とをそれぞれ有する一対のフロントフォークと、前記一対のフロントフォークの前記先端部間に構成された前輪と、前記一対のフロントフォークの前記基部がそれぞれ取り付けられた本体フレームと、前記本体フレームに取り付けられたフロントカバー及びリアカバーと、前記本体フレームに直接または前記リアカバーを介して前記本体フレームに間接的に取り付けられた一対の後輪とを有する移動玩具から一対の腕部と手部とを有するロボット玩具に変形する形態変形玩具であって、
前記後輪のホイールは、それぞれホイールカバーによって塞がれる収納凹部を備え、
前記収納凹部内に変形可能に構成された前記腕部と前記手部とが収納されており、
前記腕部と前記手部とは、前記形態変形玩具が前記移動玩具のときには前記ホイールカバーによって塞がれた前記収納凹部内に前記腕部が縮んだ状態で収納され、前記形態変形玩具が前記ロボット玩具のときには、前記収納凹部から外部に出されて前記腕部が延びた状態になるように構成されていることを特徴とする形態変形玩具
【請求項9】
前記一対のフロントフォークにより前記ロボット玩具の一対の脚部が構成され、
前記前輪が前記一対のフロントフォークの前記先端部に取り付けられる一対の分割前輪構成部材により構成されて、前記一対の分割前輪構成部材により前記ロボット玩具の一対の足部がそれぞれ構成され、
前記本体フレーム、前記フロントカバー及び前記リアカバーによって前記ロボット玩具の前記一対の脚部よりも上に位置するロボット玩具本体部が構成され、
前記後輪の車軸が、前記形態変形玩具が前記移動玩具のときには一方の位置にあり且つ前記形態変形玩具が前記ロボット玩具のときには他方の位置にあるように、前記形態変形玩具が前記ロボット玩具に変形しているときの前記ロボット玩具本体に変位可能に支持されており、
前記車軸の先端に前記腕部が取り付けられており、
前記車軸が前記他方の位置にあり且つ前記ホイールが前記車軸の基部側に変位している状態にあるとときに前記腕部と前記手部とが前記収納凹部の外部に出ることを特徴とする請求項8に記載の形態変形玩具。
【請求項10】
前記車軸は前記リアカバーに一端が回転可能に支持された回動リンクの他端に前記回動リンクが延びる方向と直交する方向にスライド可能に支持されており、
前記回動リンクは、前記形態変形玩具が前記移動玩具のときには、前記車軸が前記一方の位置にスライドし得る第1の回動位置にあり、前記形態変形玩具が前記ロボット玩具になっているときには、前記車軸の基部が前記ロボット玩具の前記胴部を構成する部品と当接状態になって前記車軸が前記他方の位置にある第2の回動位置に位置するように構成されている請求項9に記載の形態変形玩具。
【請求項11】
前記車輪の前記ホイールは、前記車軸が前記他方の位置にあるときに前記回動リンクが収納されるリンク収納凹部を備えており、前記車輪が前記ロボット玩具の肩部を構成している請求項9に記載の形態変形玩具。
【請求項1】
車輪を有する移動玩具から腕部と手部とを有するロボット玩具に変形する形態変形玩具の腕部収納構造であって、
前記車輪のホイールは、ホイールカバーによって塞がれる収納凹部を備え、
前記収納凹部内に変形可能に構成された腕部と該腕部の先端に設けられた手部とが収納されており、
前記腕部と前記手部とは、前記形態変形玩具が前記移動玩具のときには前記ホイールカバーによって塞がれた前記収納凹部内に前記腕部が縮んだ状態で収納され、前記形態変形玩具が前記ロボット玩具のときには、前記収納凹部から外部に出されて前記腕部が延びた状態になるように構成されていることを特徴とする形態変形玩具の腕部収納構造。
【請求項2】
前記ホイールカバーが前記腕部の可動部に固定されている請求項1に記載の形態変形玩具の腕部収納構造。
【請求項3】
前記ホイールカバーは、複数の部品に分割可能に構成され、
前記複数の部品のうち一部の部品は前記腕部に固定され、残りの部品は前記一部の部品と組み合わされた第1の位置と前記一部の部品から離れた第2の位置との間を任意に変位可能に前記一部の部品に取り付けられた支持機構によって支持されている請求項2に記載の形態変形玩具の腕部収納構造。
【請求項4】
前記車輪を支持する車軸は、前記形態変形玩具が前記移動玩具のときには一方の位置にあり且つ前記形態変形玩具が前記ロボット玩具のときには他方の位置にあるように、前記形態変形玩具の一部に変位可能に支持されており、
前記車軸の先端に前記腕部が取り付けられており、
前記車軸が前記他方の位置にあり且つ前記ホイールが前記車軸の基部側に変位した状態にあるときに前記腕部と前記手部とが前記収納凹部の外部に出ることを特徴とする請求項1、2または3に記載の形態変形玩具の腕部収納構造。
【請求項5】
前記車軸は前記形態変形玩具が前記ロボット玩具になっているときに胴部を構成する部品に一端が回転可能に支持された回動リンクの他端に前記回動リンクが延びる方向と直交する方向にスライド可能に支持されており、
前記回動リンクは、前記形態変形玩具が前記移動玩具のときには、前記車軸が前記一方の位置にスライドし得る第1の回動位置にあり、前記形態変形玩具が前記ロボット玩具になっているときには、前記車軸の基部が前記ロボット玩具の前記胴部を構成する部品と当接状態になって前記車軸が前記他方の位置にある第2の回動位置に位置するように構成されている請求項4に記載の形態変形玩具の腕部収納構造。
【請求項6】
前記車軸の前記基部には嵌合用凹部が形成されており、
前記胴部を構成する部品には前記回動リンクが前記第2の回動位置にあるときに、嵌合用凹部が嵌合される嵌合用凸部が形成されている請求項5に記載の形態変形玩具の腕部収納構造。
【請求項7】
前記車輪の前記ホイールは、前記車軸が前記他方の位置にあるときに前記回動リンクが収納されるリンク収納凹部を備えている請求項4に記載の形態変形玩具の腕部収納構造。
【請求項8】
先端部と基部とをそれぞれ有する一対のフロントフォークと、前記一対のフロントフォークの前記先端部間に構成された前輪と、前記一対のフロントフォークの前記基部がそれぞれ取り付けられた本体フレームと、前記本体フレームに取り付けられたフロントカバー及びリアカバーと、前記本体フレームに直接または前記リアカバーを介して前記本体フレームに間接的に取り付けられた一対の後輪とを有する移動玩具から一対の腕部と手部とを有するロボット玩具に変形する形態変形玩具であって、
前記後輪のホイールは、それぞれホイールカバーによって塞がれる収納凹部を備え、
前記収納凹部内に変形可能に構成された前記腕部と前記手部とが収納されており、
前記腕部と前記手部とは、前記形態変形玩具が前記移動玩具のときには前記ホイールカバーによって塞がれた前記収納凹部内に前記腕部が縮んだ状態で収納され、前記形態変形玩具が前記ロボット玩具のときには、前記収納凹部から外部に出されて前記腕部が延びた状態になるように構成されていることを特徴とする形態変形玩具
【請求項9】
前記一対のフロントフォークにより前記ロボット玩具の一対の脚部が構成され、
前記前輪が前記一対のフロントフォークの前記先端部に取り付けられる一対の分割前輪構成部材により構成されて、前記一対の分割前輪構成部材により前記ロボット玩具の一対の足部がそれぞれ構成され、
前記本体フレーム、前記フロントカバー及び前記リアカバーによって前記ロボット玩具の前記一対の脚部よりも上に位置するロボット玩具本体部が構成され、
前記後輪の車軸が、前記形態変形玩具が前記移動玩具のときには一方の位置にあり且つ前記形態変形玩具が前記ロボット玩具のときには他方の位置にあるように、前記形態変形玩具が前記ロボット玩具に変形しているときの前記ロボット玩具本体に変位可能に支持されており、
前記車軸の先端に前記腕部が取り付けられており、
前記車軸が前記他方の位置にあり且つ前記ホイールが前記車軸の基部側に変位している状態にあるとときに前記腕部と前記手部とが前記収納凹部の外部に出ることを特徴とする請求項8に記載の形態変形玩具。
【請求項10】
前記車軸は前記リアカバーに一端が回転可能に支持された回動リンクの他端に前記回動リンクが延びる方向と直交する方向にスライド可能に支持されており、
前記回動リンクは、前記形態変形玩具が前記移動玩具のときには、前記車軸が前記一方の位置にスライドし得る第1の回動位置にあり、前記形態変形玩具が前記ロボット玩具になっているときには、前記車軸の基部が前記ロボット玩具の前記胴部を構成する部品と当接状態になって前記車軸が前記他方の位置にある第2の回動位置に位置するように構成されている請求項9に記載の形態変形玩具。
【請求項11】
前記車輪の前記ホイールは、前記車軸が前記他方の位置にあるときに前記回動リンクが収納されるリンク収納凹部を備えており、前記車輪が前記ロボット玩具の肩部を構成している請求項9に記載の形態変形玩具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2006−34896(P2006−34896A)
【公開日】平成18年2月9日(2006.2.9)
【国際特許分類】
【出願番号】特願2004−223590(P2004−223590)
【出願日】平成16年7月30日(2004.7.30)
【出願人】(000105637)コナミ株式会社 (106)
【Fターム(参考)】
【公開日】平成18年2月9日(2006.2.9)
【国際特許分類】
【出願日】平成16年7月30日(2004.7.30)
【出願人】(000105637)コナミ株式会社 (106)
【Fターム(参考)】
[ Back to top ]