
患者支持デバイス
放射線療法用治療システムのテーブル・アセンブリの2つの対向する端部を実質的に同期させるように構成される方法およびシステム。このシステムは、横方向運動制御システムを備える。横方向運動制御システムは、テーブル・アセンブリと結合され、テーブル・アセンブリが放射線療法用治療システムのガントリに対して横方向に移動される際に、テーブル・アセンブリの2つの対向する端部の位置を検出し、それらの位置を実質的に同期させるように構成される。

【発明の詳細な説明】
【技術分野】
【0001】
本出願は、2007年9月4日に出願された米国仮特許出願第60/969,904号に基づく優先権を主張するものであり、その出願の全内容が参照により本明細書に組み込まれる。
【0002】
本発明は、放射線療法の撮像および治療のシステムに関する。より具体的には、本発明は、改善された運動制御を備えるそのようなシステムと共に使用するための患者支持デバイスに関する。
【背景技術】
【0003】
放射線療法用の医療設備は、高エネルギー放射線により潰瘍組織を治療する。線量および線量配置は、潰瘍が破壊されるのに十分な放射線を受けるように、ならびに、周囲および隣接する非潰瘍組織に対する損傷が最小限に抑えられるように、正確に制御されなければならない。強度変調放射線治療(IMRT:intensity modulated radiation therapy)は、強度および/またはエネルギーがそれぞれ別個に制御され得る複数の放射線によって、患者を治療する。これらの放射線は、患者に対して様々な角度から送られ、組み合わされ、所望される線量パターンを形成する。外部放射線源を用いる放射線療法においては、患者の外部にある放射線源が、内部の潰瘍を治療する。この外部放射線源は、通常は、潰瘍部位にのみにビームが向かうようにコリメートされる。典型的には、放射線源は、高エネルギーX線、特定の線形加速器からの電子、または高度に集束された放射性同位元素からのガンマ線の何れかを含むが、他のタイプの放射線源も可能である。
【0004】
患者に対する放射線照射の位置を制御する1つの方式は、1または複数の方向に調節可能な診療台などのような患者支持デバイスを使用することによるものである。患者支持デバイスの使用は、医療分野においてよく知られており、同様の患者支持デバイスが、CTスキャン・デバイスおよび磁気共鳴撮像装置(MRI)において使用される。患者支持デバイスにより、患者を、照射される放射線の領域内または領域外に移動させることが可能となり、場合によっては、放射線治療の最中に患者の位置を調節することが可能となる。
【発明の概要】
【0005】
診療台などの患者支持デバイスがこのようにして使用されるとき、考慮する必要のある多数の変数が存在する。例えば、構造材料、および診療台を操作するために必要な適切な電子機器の構成を慎重に選択し、診療台の円滑な操作および診療台の位置の正確な測定(診療台が複数の可動部分を有するとき)を確実なものとしなければならない。これらの特徴が放射線照射環境において十分に考慮されるとき、患者支持デバイスは、患者に対する成果を向上させる重要なツールになり得る。
【0006】
一実施形態において、本発明は、ベースと、テーブル・アセンブリと、制御装置と、横方向運動制御システムとを備える患者支持デバイスを提供する。テーブル・アセンブリは、患者を支持するように構成され、下側支持部と、下側支持部に対して移動可能な上側支持部とを備え、上側支持部は、第1の端部および第2の端部を備える。制御装置は、テーブル・アセンブリと電気的に結合され、ある軸に沿って第1の方向に、また、その軸に対して横方向に、また、その軸に対して垂直方向に移動するように、テーブル・アセンブリに対して指示するように構成される。横方向運動制御システムは、テーブル・アセンブリと電気的に結合されるものであり、上側支持部の第1の端部と結合されたシャフトを含む第1のモータと、シャフトと結合され、第1のモータのシャフトの第1の位置を検出するように構成された第1のエンコーダと、上側支持部の第2の端部と結合されたシャフトを含む第2のモータと、シャフトと結合され、第2のモータのシャフトの第2の位置を検出するように構成された第2のエンコーダとを備え、制御装置は、第1の位置および第2の位置を受け取り、比較するように構成され、制御装置は、第1の位置および第2の位置を実質的に同期させるように第1のモータおよび第2のモータに指示を通信するように構成される。
【0007】
別の実施形態において、本発明は、ガントリと、患者を支持するように構成されたテーブル・アセンブリと、制御装置と、横方向運動制御システムとを備える放射線療法用治療システムを提供する。テーブル・アセンブリは、下側支持部と、下側支持部に対して移動可能な上側支持部とを備え、上側支持部は、第1の端部および第2の端部を備える。制御装置は、テーブル・アセンブリと電気的に結合され、ガントリ内への第1の方向に、また、第1の方向に対して横方向に、また、第1の方向に対して垂直方向に移動するように、テーブル・アセンブリに対して指示するように構成される。横方向運動制御システムは、テーブル・アセンブリと電気的に結合され、上側支持部の第1の端部の位置および上側支持部の第2の端部の位置を検出し、第1の端部の位置および第2の端部の位置を出力するように構成される。
【0008】
本発明の別の態様において、本発明は、放射線療法用治療システム用のテーブル・アセンブリの第1の端部の位置を検出するステップと、テーブル・アセンブリの第2の端部の位置を検出するステップと、第2の端部の位置と第1の端部の位置とを比較するステップと、第1の端部の位置と第2の端部の位置とを実質的に同期させるステップとを含む方法を提供する。
【0009】
本発明の他の態様は、詳細な説明および添付の図面を精査することにより明らかになろう。
【図面の簡単な説明】
【0010】
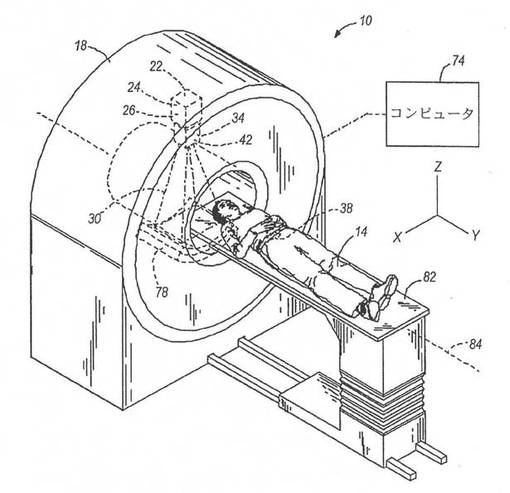
【図1】図1は、放射線療法用治療システムの斜視図である。
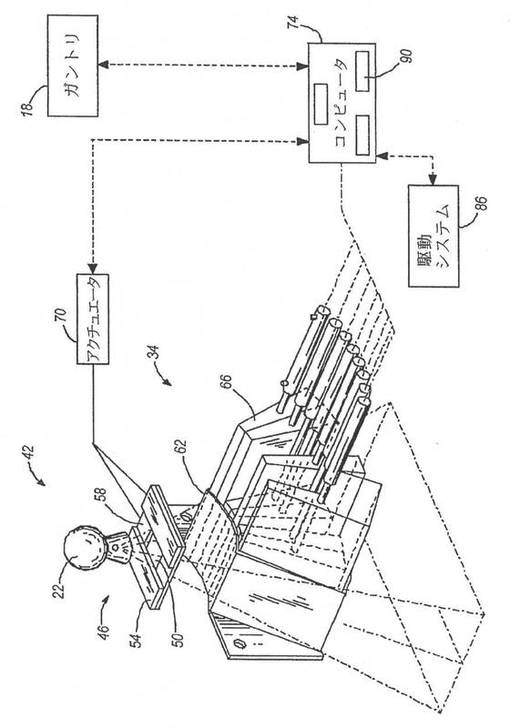
【図2】図2は、図1に図示される放射線療法用治療システムにおいて使用することが可能なマルチリーフ・コリメータの斜視図である。
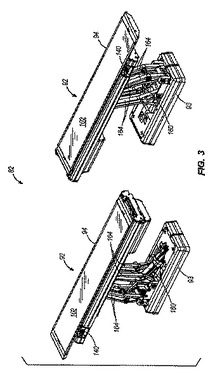
【図3】図3は、図1のシステムと共に使用するための患者支持デバイスの斜視図である。
【図4】図4は、図3の患者支持デバイスのテーブル・アセンブリの分解図である。
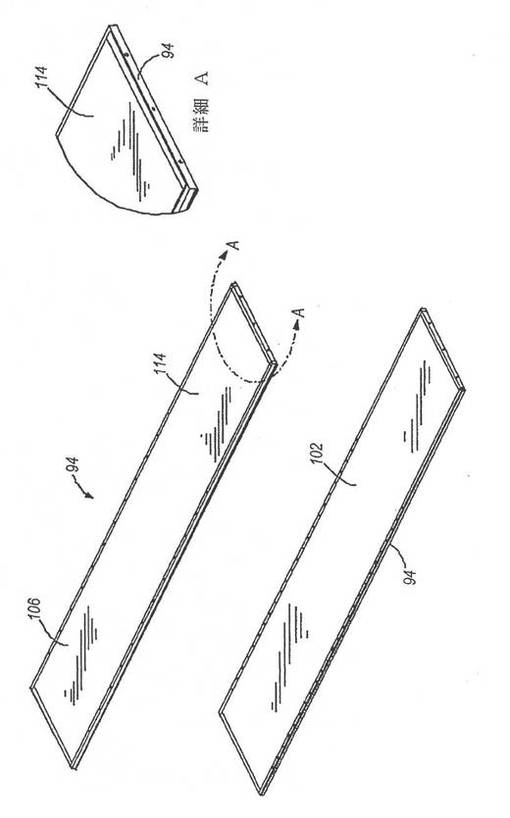
【図5】図5は、図4のテーブル・アセンブリの上側支持部の斜視図である。
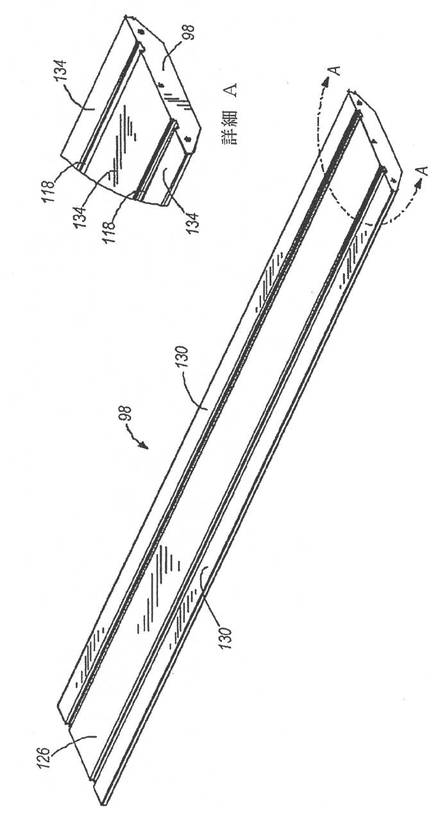
【図6】図6は、図4のテーブル・アセンブリの下側支持部の斜視図である。
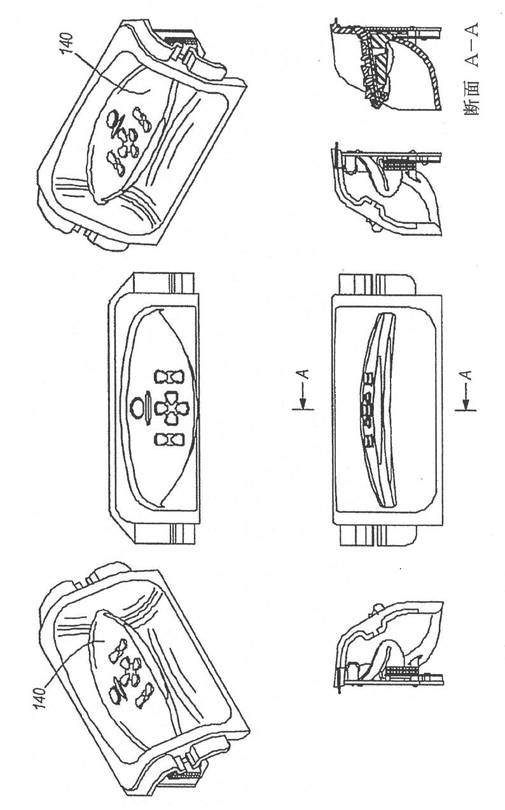
【図7】図7は、図1の患者支持デバイスと共に使用するための制御キーパッドの様々な図である。
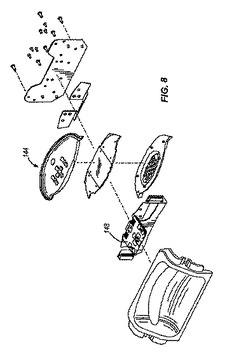
【図8】図8は、図7のキーパッドの分解図である。
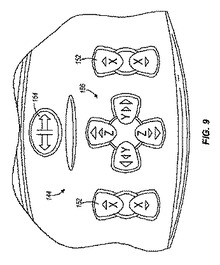
【図9】図9は、図7のキーパッドの正面図であり、制御ボタンを更に詳細に示す。
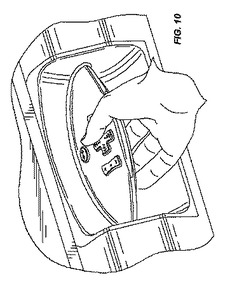
【図10】図10は、図7のキーパッドの斜視図であり、患者支持デバイスのオペレータによるボタンの操作を示す。
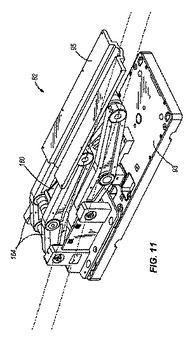
【図11】図11は、図3の患者支持デバイスの斜視図であり、下側位置にあるところを示す。
【図12】図12は、図3の患者支持デバイスのライザを示す。
【図13】図13は、本発明の一実施形態による横方向運動制御システムの図である。
【発明を実施するための形態】
【0011】
本発明の実施形態の詳細な説明を行う前に、本発明はその適用が、以下の説明において示される、または以下の図面において示される構成要素の構造および構成の詳細に限定されないことを理解されたい。本発明は、他の実施形態が可能であり、様々な様式での実施または実現が可能である。また、本明細書において使用される術語および用語は説明のためのものであり、限定的なものとして見なされるべきではないことを理解されたい。本明細書において、「含む」、「備える」、「有する」、およびそれらの変化した語が使用される場合には、以降に挙げられる物およびその均等物、ならびに追加的な物が包含される。明示されない限り、または他の様式で限定されない限り、「取り付けられた」、「接続された」、「支持された」、および「結合された」、ならびにそれらの変化した語は広義に使用され、直接的ならびに間接的な、取付け、接続、支持、および結合を包含する。
【0012】
本明細書において、図面を説明する上で上側、下側、下側向、上側向、後方、底部、前部、後部などのような、方向に関する参照がなされることがあるが、これらの参照は、便宜上の理由により図面(普通に見たとき)に対してなされる。これらの方向は、文字通り理解されることも、何らかの形態に本発明を限定することも意図されていない。更に、本明細書において、「第1の」、「第2の」、「第3の」などの語は、説明のために使用されるものであり、相対的な重要性や優位性を指示するものではなく、意図するものではない。
【0013】
更に、本発明の実施形態は、説明上の理由により、それらの構成要素の大半が専らハードウェアとして実装されたものとして示され説明され得る、ハードウェア、ソフトウェア、および電子構成要素または電子モジュールを含むことを理解されたい。しかしながら、当業者には、この詳細な説明を読めば、少なくとも1つの実施形態において、本発明の電子ベースの態様をソフトウェアとして実装でき得ることが理解されよう。従って、複数のハードウェア・ベース・デバイスおよびソフトウェア・ベース・デバイス、ならびに複数の異なる構造コンポーネントが本発明を実施するために使用され得ることに、留意されたい。更に、以降の段落において説明されるように、図面に示される特定の機械的構成は、本発明の実施形態を例示することを意図しており、他の代替の機械的構成も可能である。
【0014】
図1は、患者14に対して放射線療法を施すことが可能な放射線療法用治療システム10を示す。放射線療法による治療は、光子ベースの放射線療法、近接照射療法、電子ビーム療法、光子療法、中性子療法、粒子療法、または他のタイプの治療法を含み得る。放射線療法用治療システム10はガントリ18を含む。ガントリ18は放射線モジュール22を支持することが可能であり、放射線モジュール22は、放射線源24、および、放射線のビーム30を生成するように動作可能な線形加速器26(別称「リニアック」)を備えることが可能である。図に示されるガントリ18はリング型ガントリであり、全360°の弧を通って延び、完全なリングまたは円を形成するが、他のタイプの取付け構成も使用されてよい。例えば、C型の部分リング型ガントリやロボット・アームを使用することが可能である。また、患者14に対して様々な回転位置および/または軸方向位置において放射線モジュール22を位置決めすることが可能な任意の他のフレームワークが使用されてもよい。更に、放射線源24は、ガントリ18の形状に従わない経路を移動してよい。例えば、放射線源24は、図示されるガントリ18が略円形の形状であっても、非円形経路を移動してよい。示される実施形態のガントリ18はガントリ開口32を画定し、その開口の中を、患者14が治療の際に移動する。
【0015】
放射線モジュール22は、放射線ビーム30を変更または変調するように動作可能な変調デバイス34も備えることが可能である。変調デバイス34は、放射線ビーム30の変調を行い、患者14の方へ放射線ビーム30を向けて送る。具体的には、放射線ビーム30は、患者の一部分38へ向けられる。広く述べれば、部分は、全身を含んでもよいが、一般的には、全身よりも狭く、2次元範囲および/または3次元体積により画定され得る。放射線を受けることが望ましい一部分または一部位(標的または標的領域と呼ばれることもある)が、関心領域の一例である。別のタイプの関心領域は、危険領域である。ある部分が危険領域を含む場合、放射線ビームは、その危険領域からそらされることが好ましい。このような変調は、強度変調放射線治療(「IMRT」)と呼ばれることもある。
【0016】
変調デバイス34は、図2に示されるようなコリメーション・デバイス42を備えることが可能である。コリメーション・デバイス42は、放射線ビーム30が通過し得る開口50のサイズを画定および調節する1組のジョー部(jaw)46を備える。ジョー部46は、上側ジョー部54および下側ジョー部58を備える。上側ジョー部54および下側ジョー部58は、開口50のサイズを調節するように移動可能である。ジョー部46の位置により、患者14へ照射されるビーム30の形状が調整される。
【0017】
一実施形態においては、図2に示されるように、変調デバイス34はマルチリーフ・コリメータ62(通称「MLC」)を備えることが可能であり、このマルチリーフ・コリメータ62は、強度変調を実施するために、ある位置間で移動するように動作可能な複数のインターレースされたリーフ66を備える。また、リーフ66は、最小開位置と最大開位置との間における任意の位置に移動され得ることに留意されたい。複数のインターレースされたリーフ66は、放射線ビーム30が患者14の部分38に到達する前に、放射線ビーム30の強度、サイズ、および形状を変調する。リーフ66のそれぞれは、モータや空気弁などのようなアクチュエータ70によって個別に制御され、リーフ66が放射線の通過を許可または遮断するために迅速に開閉することが可能とされる。アクチュエータ70は、コンピュータ74および/または制御装置により制御され得る。
【0018】
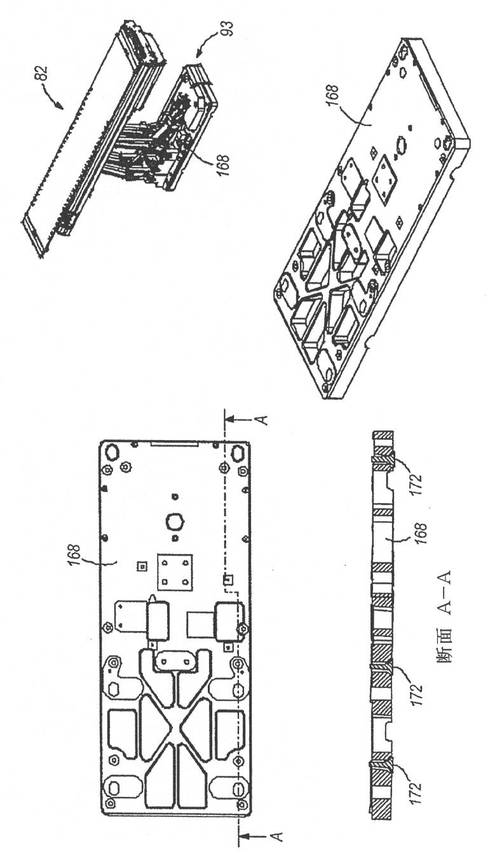
また、放射線療法用治療システム10は、図1に示されるように、放射線ビーム30を受けるように動作可能な、例えば、キロボルト検出器またはメガボルト検出器などのような検出器78を備えることができる。線形加速器(リニア・アクセレレータ)26および検出器78は、コンピュータ断層撮影(CT)システムとして動作して、患者14のCT画像を生成することも可能である。線形加速器26は、患者14の部分38の方へ放射線ビーム30を発する。部分38は、放射線の一部を吸収する。検出器78は、部分38により吸収された放射線量を検出または測定する。線形加速器26が患者14の周囲にて回転して患者14の方へ放射線を発すると、検出器78は、様々な角度からの吸収度データを収集する。収集された吸収度データはコンピュータ74へ伝送され、吸収度データが処理され、患者の身体組織および身体器官の画像が生成される。これらの画像は、骨、軟組織、および血管を示すことも可能である。また、システム10は、治療の際に患者14の少なくとも一部を支持するように動作可能な、診療台82として示されている患者支持デバイスを備えることも可能である。図示される診療台82は患者14の全身を支持するように設計されているが、本発明の他の実施形態においては、患者支持部は、全身を支持する必要はなく、治療の際に患者14の一部分のみを支持するように設計されてもよい。診療台82は、軸84(即ちY軸)に沿って、放射線領域内および放射線領域外に移動する。診療台82はまた、図に示すX軸およびZ軸に沿って移動することもできる。
【0019】
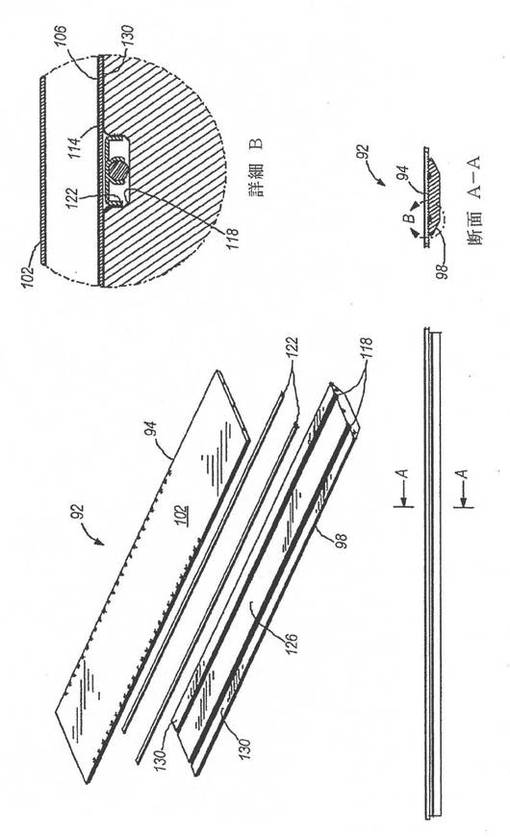
図3ないし図6を参照すると、診療台82は、プラットフォーム95を介してベース93と結合されたテーブル・アセンブリ92を備える。テーブル・アセンブリ92は、下側支持部98と可動式に結合された上側支持部94を備える。とりわけ図5を参照すると、上側支持部94は、実質的に平坦な矩形の支持部材であり、その上にて治療の際に患者が支持される。上側支持部94は、治療の際に放射線ビーム30内および放射線ビーム30外に患者を移動させるように、下側支持部98に対して移動可能である。図示される実施形態において、上側支持部94および下側支持部98は、炭素繊維複合体で構成されるが、他の適切な複合体からなる支持部も可能である。
【0020】
上側支持部94は、上側面102と、下側支持部98の上側面110に接触する下側面106とを有する。実施形態に示されるように、下側面106は、上側支持部94が下側支持部98に対して移動される際の、下側面106と下側支持部98の上側面110との間の摩擦を低減させることを意図したベアリング層114を備える。図示される実施形態において、ベアリング層114は、感圧接着剤を使用して下側面106に結合されるポリイミド・ラミネートである。図示される実施形態において、このラミネートは、DuPont(登録商標)社から入手可能なKapton(登録商標)である。上側支持部94が下側支持部98に対して移動するとき、これら支持部の間に生じる摩擦が、診療台82の動作を制御する電子機器の動作の妨げとなるおそれがあり、従って、この摩擦を低減させることが本発明の目的の1つとなる。更に、支持部が、炭素繊維複合体から構成されている場合、この摩擦により炭素の粉塵が生じて蓄積されるおそれがあり、これは、診療台の動作に問題を引き起こすおそれがある。更に、上側支持部94および下側支持部98の表面が互いに直接的に接触した場合、この接触により、さらなる磨耗が生じ、おそらくはそれらの支持部自体に反りが生じることになり、これにより、診療台により患者を位置決めする動作の精度が低下するだけではなく、診療台に故障が生じるおそれもある。
【0021】
図4を参照すると、下側支持部98は、診療台82の操作に必要な配線を受容し収容するように設計された2つのチャネル118を備える。幾つかの実施形態において、保持部材122がチャネル118内で配線の上に配置され、配線を定位置に保持し、配線をチャネル118内で直線状にするように作用して、上側支持部94と下側支持部98との間で配線が挟まれる可能性を低減させる。更に、画像の再現性のためにも、配線を直線的かつ一定の位置に保持することが望ましい。保持部材122と配線自体の外側シースとの双方とも耐放射線性材料から構成され、診療台82の高放射線環境における配線の保護および適切な機能を実現する。チャネル118の間隔および設計は、データ線と電力線とを分けるように選択され、2つの線が十分に離間されないときに生じる干渉の問題を回避するようにされる。
【0022】
テーブル・アセンブリ92は、図1に示されるように、X、Y、およびZ方向に移動可能である。ガントリ18および放射線ビーム30に対するテーブル・アセンブリ92の位置決め、従って、患者の位置の位置決めは、患者の適切な部位に放射線が確実に照射されるように、正確なものでなければならない。テーブル・アセンブリ92の動きは、図7ないし図10において示される制御キーパッド140を使用して診療台オペレータにより制御される。ユーザが、キーパッド140のボタン144を作動させると、テーブル・アセンブリ92はユーザの指示で移動することになる。
【0023】
本発明による診療台82の別の特徴は、横方向移動(即ちX方向の移動)が自動的に制御され、テーブル・アセンブリ92の両端部の横方向移動が同期される点である。従来の患者支持テーブルにおいて、横方向運動の調節は、横方向における位置を調節するために手動で回転されるノブまたはねじを使用して、達成される。この調節は、手動式であるばかりでなく、支持テーブルの各端部の調節が個別に行われなければならず、テーブルの端部の位置を同期させる機構は存在しない。これは、一方の端部が他方の端部より極度に横方向の位置へと動かされる場合があるため、患者位置決めエラーを生じさせる可能性があり、横方向における両端部の適正な同期された位置を得ることは非常に困難である。
【0024】
更に、端部を同期させることは、信頼性があり再現可能な撮像結果を確実なものとすることにおいて有効である。患者を撮影するために診療台82上の患者が放射線を受ける本発明のシステムなどのようなシステムでは、放射線源と、画像を生成するためにシステムへデータを供給する検出器との間の経路におけるあらゆるものが、画像の品質に影響を及ぼし得る。上述のテーブル・アセンブリ92の下側に延在する配線は、撮影される画像の品質に支障を及ぼすおそれがあり、画像上のアーティファクト、すなわち、療法士や医師が得られた画像を検討するときに考慮したいであろうアーティファクトとなり得る。上述の下側支持部98のチャネル118は、配線を分離され収容された状態に保つ役割を果たす。チャネル118の位置を認識することに加えて、テーブル・アセンブリ92の端部の動きを同期させることによって、医師/療法士は予測可能なアーティファクトを得ることができ、この予測可能なアーティファクトは、医師/療法士が画像を見たときに効果的に排除することが可能である。なぜなら、それらのアーティファクトは、予測可能な位置にあり、補正可能なものであり、画像が再現可能なものであるからである。同期しない場合には、アーティファクトは、ユーザにとってより大きな妨げとなる。
【0025】
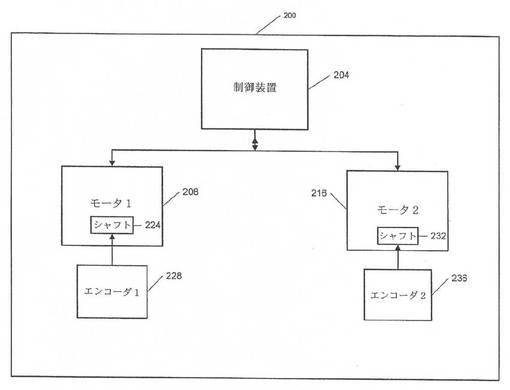
診療台82は、図13に示される本発明の一実施形態による横方向運動制御システム200を備える。横方向運動制御システム200は制御装置204を備え、制御装置204は、テーブル・アセンブリ92の第1の端部212の近くに配置される第1のモータ208と電気的に結合され、かつ、テーブル・アセンブリ92の第2の端部220の近くに配置される第2のモータ216と電気的に結合される。第1のモータ208は、シャフト224と、シャフト224に結合されたエンコーダ228とを備える。第2のモータ216は、シャフト232と、シャフト232に結合されたエンコーダ236とを備える。エンコーダ228、236は、各モータのシャフトの位置データを送るために、制御装置204と通信する。制御装置204は、キーパッド140から動作指示を受け取る。制御装置204はコンピュータ・コードを備え、このコンピュータ・コードは、テーブル・アセンブリ92の両端部で各モータ208、216のシャフト224、232が確実に同期されるように、エンコーダ228、236からの位置データを比較する。制御装置204は、同時に両軸の方向(XおよびY)にテーブル・アセンブリ92を移動させ、この移動と同時にヨー(yaw)を求める。エンコーダ228、236は絶対(アブソリュート)エンコーダであり、これは、同期を可能にするために、SSIや他の適切なタイプのフィードバックなどのようなフィードバックを組み入れる。
【0026】
モータ208、216を、エンコーダ228、236の線形絶対フィードバックと関連して使用することにより、システムは、テーブル・アセンブリ92のヨーイングおよびクラブ運動(横に流される運動)を検出し、その情報をオペレータに対して表示することが可能となる。フィードバックがリニア(線形)であることにより、ユーザは、負荷側で生じていることを理解することも可能となる。このフィードバック情報は全て、上述のようにチャネル118において供給電力からフィードバック・ライン(データ線)を隔離することにより、可能となる。
【0027】
Y軸運動は、ステッピング・モータを使用して制御される。テーブル・アセンブリ92が移動している間、絶対線形フィードバックが使用され、テーブル・アセンブリ92を許容限度内に保持するようにテーブル・アセンブリ92をサーボ制御し、それにより、診療台の動作の制御における精度が向上する。更に、Y軸運動制御は、障害物の検出が可能となる利点や、起きようとしている診療台の衝突(ガントリとなど)の検出が可能となり、衝突前に診療台を停止させられる利点がある。衝突の検出は、診療台位置に関する連続的なダブル・チェッキングにより動的に実施される。あらゆる誤差の伝播が、PCP上でエンドユーザに対して表示される。
【0028】
この発明のさらなる特徴は、以下の特許請求の範囲から見出すことが可能である。
【技術分野】
【0001】
本出願は、2007年9月4日に出願された米国仮特許出願第60/969,904号に基づく優先権を主張するものであり、その出願の全内容が参照により本明細書に組み込まれる。
【0002】
本発明は、放射線療法の撮像および治療のシステムに関する。より具体的には、本発明は、改善された運動制御を備えるそのようなシステムと共に使用するための患者支持デバイスに関する。
【背景技術】
【0003】
放射線療法用の医療設備は、高エネルギー放射線により潰瘍組織を治療する。線量および線量配置は、潰瘍が破壊されるのに十分な放射線を受けるように、ならびに、周囲および隣接する非潰瘍組織に対する損傷が最小限に抑えられるように、正確に制御されなければならない。強度変調放射線治療(IMRT:intensity modulated radiation therapy)は、強度および/またはエネルギーがそれぞれ別個に制御され得る複数の放射線によって、患者を治療する。これらの放射線は、患者に対して様々な角度から送られ、組み合わされ、所望される線量パターンを形成する。外部放射線源を用いる放射線療法においては、患者の外部にある放射線源が、内部の潰瘍を治療する。この外部放射線源は、通常は、潰瘍部位にのみにビームが向かうようにコリメートされる。典型的には、放射線源は、高エネルギーX線、特定の線形加速器からの電子、または高度に集束された放射性同位元素からのガンマ線の何れかを含むが、他のタイプの放射線源も可能である。
【0004】
患者に対する放射線照射の位置を制御する1つの方式は、1または複数の方向に調節可能な診療台などのような患者支持デバイスを使用することによるものである。患者支持デバイスの使用は、医療分野においてよく知られており、同様の患者支持デバイスが、CTスキャン・デバイスおよび磁気共鳴撮像装置(MRI)において使用される。患者支持デバイスにより、患者を、照射される放射線の領域内または領域外に移動させることが可能となり、場合によっては、放射線治療の最中に患者の位置を調節することが可能となる。
【発明の概要】
【0005】
診療台などの患者支持デバイスがこのようにして使用されるとき、考慮する必要のある多数の変数が存在する。例えば、構造材料、および診療台を操作するために必要な適切な電子機器の構成を慎重に選択し、診療台の円滑な操作および診療台の位置の正確な測定(診療台が複数の可動部分を有するとき)を確実なものとしなければならない。これらの特徴が放射線照射環境において十分に考慮されるとき、患者支持デバイスは、患者に対する成果を向上させる重要なツールになり得る。
【0006】
一実施形態において、本発明は、ベースと、テーブル・アセンブリと、制御装置と、横方向運動制御システムとを備える患者支持デバイスを提供する。テーブル・アセンブリは、患者を支持するように構成され、下側支持部と、下側支持部に対して移動可能な上側支持部とを備え、上側支持部は、第1の端部および第2の端部を備える。制御装置は、テーブル・アセンブリと電気的に結合され、ある軸に沿って第1の方向に、また、その軸に対して横方向に、また、その軸に対して垂直方向に移動するように、テーブル・アセンブリに対して指示するように構成される。横方向運動制御システムは、テーブル・アセンブリと電気的に結合されるものであり、上側支持部の第1の端部と結合されたシャフトを含む第1のモータと、シャフトと結合され、第1のモータのシャフトの第1の位置を検出するように構成された第1のエンコーダと、上側支持部の第2の端部と結合されたシャフトを含む第2のモータと、シャフトと結合され、第2のモータのシャフトの第2の位置を検出するように構成された第2のエンコーダとを備え、制御装置は、第1の位置および第2の位置を受け取り、比較するように構成され、制御装置は、第1の位置および第2の位置を実質的に同期させるように第1のモータおよび第2のモータに指示を通信するように構成される。
【0007】
別の実施形態において、本発明は、ガントリと、患者を支持するように構成されたテーブル・アセンブリと、制御装置と、横方向運動制御システムとを備える放射線療法用治療システムを提供する。テーブル・アセンブリは、下側支持部と、下側支持部に対して移動可能な上側支持部とを備え、上側支持部は、第1の端部および第2の端部を備える。制御装置は、テーブル・アセンブリと電気的に結合され、ガントリ内への第1の方向に、また、第1の方向に対して横方向に、また、第1の方向に対して垂直方向に移動するように、テーブル・アセンブリに対して指示するように構成される。横方向運動制御システムは、テーブル・アセンブリと電気的に結合され、上側支持部の第1の端部の位置および上側支持部の第2の端部の位置を検出し、第1の端部の位置および第2の端部の位置を出力するように構成される。
【0008】
本発明の別の態様において、本発明は、放射線療法用治療システム用のテーブル・アセンブリの第1の端部の位置を検出するステップと、テーブル・アセンブリの第2の端部の位置を検出するステップと、第2の端部の位置と第1の端部の位置とを比較するステップと、第1の端部の位置と第2の端部の位置とを実質的に同期させるステップとを含む方法を提供する。
【0009】
本発明の他の態様は、詳細な説明および添付の図面を精査することにより明らかになろう。
【図面の簡単な説明】
【0010】
【図1】図1は、放射線療法用治療システムの斜視図である。
【図2】図2は、図1に図示される放射線療法用治療システムにおいて使用することが可能なマルチリーフ・コリメータの斜視図である。
【図3】図3は、図1のシステムと共に使用するための患者支持デバイスの斜視図である。
【図4】図4は、図3の患者支持デバイスのテーブル・アセンブリの分解図である。
【図5】図5は、図4のテーブル・アセンブリの上側支持部の斜視図である。
【図6】図6は、図4のテーブル・アセンブリの下側支持部の斜視図である。
【図7】図7は、図1の患者支持デバイスと共に使用するための制御キーパッドの様々な図である。
【図8】図8は、図7のキーパッドの分解図である。
【図9】図9は、図7のキーパッドの正面図であり、制御ボタンを更に詳細に示す。
【図10】図10は、図7のキーパッドの斜視図であり、患者支持デバイスのオペレータによるボタンの操作を示す。
【図11】図11は、図3の患者支持デバイスの斜視図であり、下側位置にあるところを示す。
【図12】図12は、図3の患者支持デバイスのライザを示す。
【図13】図13は、本発明の一実施形態による横方向運動制御システムの図である。
【発明を実施するための形態】
【0011】
本発明の実施形態の詳細な説明を行う前に、本発明はその適用が、以下の説明において示される、または以下の図面において示される構成要素の構造および構成の詳細に限定されないことを理解されたい。本発明は、他の実施形態が可能であり、様々な様式での実施または実現が可能である。また、本明細書において使用される術語および用語は説明のためのものであり、限定的なものとして見なされるべきではないことを理解されたい。本明細書において、「含む」、「備える」、「有する」、およびそれらの変化した語が使用される場合には、以降に挙げられる物およびその均等物、ならびに追加的な物が包含される。明示されない限り、または他の様式で限定されない限り、「取り付けられた」、「接続された」、「支持された」、および「結合された」、ならびにそれらの変化した語は広義に使用され、直接的ならびに間接的な、取付け、接続、支持、および結合を包含する。
【0012】
本明細書において、図面を説明する上で上側、下側、下側向、上側向、後方、底部、前部、後部などのような、方向に関する参照がなされることがあるが、これらの参照は、便宜上の理由により図面(普通に見たとき)に対してなされる。これらの方向は、文字通り理解されることも、何らかの形態に本発明を限定することも意図されていない。更に、本明細書において、「第1の」、「第2の」、「第3の」などの語は、説明のために使用されるものであり、相対的な重要性や優位性を指示するものではなく、意図するものではない。
【0013】
更に、本発明の実施形態は、説明上の理由により、それらの構成要素の大半が専らハードウェアとして実装されたものとして示され説明され得る、ハードウェア、ソフトウェア、および電子構成要素または電子モジュールを含むことを理解されたい。しかしながら、当業者には、この詳細な説明を読めば、少なくとも1つの実施形態において、本発明の電子ベースの態様をソフトウェアとして実装でき得ることが理解されよう。従って、複数のハードウェア・ベース・デバイスおよびソフトウェア・ベース・デバイス、ならびに複数の異なる構造コンポーネントが本発明を実施するために使用され得ることに、留意されたい。更に、以降の段落において説明されるように、図面に示される特定の機械的構成は、本発明の実施形態を例示することを意図しており、他の代替の機械的構成も可能である。
【0014】
図1は、患者14に対して放射線療法を施すことが可能な放射線療法用治療システム10を示す。放射線療法による治療は、光子ベースの放射線療法、近接照射療法、電子ビーム療法、光子療法、中性子療法、粒子療法、または他のタイプの治療法を含み得る。放射線療法用治療システム10はガントリ18を含む。ガントリ18は放射線モジュール22を支持することが可能であり、放射線モジュール22は、放射線源24、および、放射線のビーム30を生成するように動作可能な線形加速器26(別称「リニアック」)を備えることが可能である。図に示されるガントリ18はリング型ガントリであり、全360°の弧を通って延び、完全なリングまたは円を形成するが、他のタイプの取付け構成も使用されてよい。例えば、C型の部分リング型ガントリやロボット・アームを使用することが可能である。また、患者14に対して様々な回転位置および/または軸方向位置において放射線モジュール22を位置決めすることが可能な任意の他のフレームワークが使用されてもよい。更に、放射線源24は、ガントリ18の形状に従わない経路を移動してよい。例えば、放射線源24は、図示されるガントリ18が略円形の形状であっても、非円形経路を移動してよい。示される実施形態のガントリ18はガントリ開口32を画定し、その開口の中を、患者14が治療の際に移動する。
【0015】
放射線モジュール22は、放射線ビーム30を変更または変調するように動作可能な変調デバイス34も備えることが可能である。変調デバイス34は、放射線ビーム30の変調を行い、患者14の方へ放射線ビーム30を向けて送る。具体的には、放射線ビーム30は、患者の一部分38へ向けられる。広く述べれば、部分は、全身を含んでもよいが、一般的には、全身よりも狭く、2次元範囲および/または3次元体積により画定され得る。放射線を受けることが望ましい一部分または一部位(標的または標的領域と呼ばれることもある)が、関心領域の一例である。別のタイプの関心領域は、危険領域である。ある部分が危険領域を含む場合、放射線ビームは、その危険領域からそらされることが好ましい。このような変調は、強度変調放射線治療(「IMRT」)と呼ばれることもある。
【0016】
変調デバイス34は、図2に示されるようなコリメーション・デバイス42を備えることが可能である。コリメーション・デバイス42は、放射線ビーム30が通過し得る開口50のサイズを画定および調節する1組のジョー部(jaw)46を備える。ジョー部46は、上側ジョー部54および下側ジョー部58を備える。上側ジョー部54および下側ジョー部58は、開口50のサイズを調節するように移動可能である。ジョー部46の位置により、患者14へ照射されるビーム30の形状が調整される。
【0017】
一実施形態においては、図2に示されるように、変調デバイス34はマルチリーフ・コリメータ62(通称「MLC」)を備えることが可能であり、このマルチリーフ・コリメータ62は、強度変調を実施するために、ある位置間で移動するように動作可能な複数のインターレースされたリーフ66を備える。また、リーフ66は、最小開位置と最大開位置との間における任意の位置に移動され得ることに留意されたい。複数のインターレースされたリーフ66は、放射線ビーム30が患者14の部分38に到達する前に、放射線ビーム30の強度、サイズ、および形状を変調する。リーフ66のそれぞれは、モータや空気弁などのようなアクチュエータ70によって個別に制御され、リーフ66が放射線の通過を許可または遮断するために迅速に開閉することが可能とされる。アクチュエータ70は、コンピュータ74および/または制御装置により制御され得る。
【0018】
また、放射線療法用治療システム10は、図1に示されるように、放射線ビーム30を受けるように動作可能な、例えば、キロボルト検出器またはメガボルト検出器などのような検出器78を備えることができる。線形加速器(リニア・アクセレレータ)26および検出器78は、コンピュータ断層撮影(CT)システムとして動作して、患者14のCT画像を生成することも可能である。線形加速器26は、患者14の部分38の方へ放射線ビーム30を発する。部分38は、放射線の一部を吸収する。検出器78は、部分38により吸収された放射線量を検出または測定する。線形加速器26が患者14の周囲にて回転して患者14の方へ放射線を発すると、検出器78は、様々な角度からの吸収度データを収集する。収集された吸収度データはコンピュータ74へ伝送され、吸収度データが処理され、患者の身体組織および身体器官の画像が生成される。これらの画像は、骨、軟組織、および血管を示すことも可能である。また、システム10は、治療の際に患者14の少なくとも一部を支持するように動作可能な、診療台82として示されている患者支持デバイスを備えることも可能である。図示される診療台82は患者14の全身を支持するように設計されているが、本発明の他の実施形態においては、患者支持部は、全身を支持する必要はなく、治療の際に患者14の一部分のみを支持するように設計されてもよい。診療台82は、軸84(即ちY軸)に沿って、放射線領域内および放射線領域外に移動する。診療台82はまた、図に示すX軸およびZ軸に沿って移動することもできる。
【0019】
図3ないし図6を参照すると、診療台82は、プラットフォーム95を介してベース93と結合されたテーブル・アセンブリ92を備える。テーブル・アセンブリ92は、下側支持部98と可動式に結合された上側支持部94を備える。とりわけ図5を参照すると、上側支持部94は、実質的に平坦な矩形の支持部材であり、その上にて治療の際に患者が支持される。上側支持部94は、治療の際に放射線ビーム30内および放射線ビーム30外に患者を移動させるように、下側支持部98に対して移動可能である。図示される実施形態において、上側支持部94および下側支持部98は、炭素繊維複合体で構成されるが、他の適切な複合体からなる支持部も可能である。
【0020】
上側支持部94は、上側面102と、下側支持部98の上側面110に接触する下側面106とを有する。実施形態に示されるように、下側面106は、上側支持部94が下側支持部98に対して移動される際の、下側面106と下側支持部98の上側面110との間の摩擦を低減させることを意図したベアリング層114を備える。図示される実施形態において、ベアリング層114は、感圧接着剤を使用して下側面106に結合されるポリイミド・ラミネートである。図示される実施形態において、このラミネートは、DuPont(登録商標)社から入手可能なKapton(登録商標)である。上側支持部94が下側支持部98に対して移動するとき、これら支持部の間に生じる摩擦が、診療台82の動作を制御する電子機器の動作の妨げとなるおそれがあり、従って、この摩擦を低減させることが本発明の目的の1つとなる。更に、支持部が、炭素繊維複合体から構成されている場合、この摩擦により炭素の粉塵が生じて蓄積されるおそれがあり、これは、診療台の動作に問題を引き起こすおそれがある。更に、上側支持部94および下側支持部98の表面が互いに直接的に接触した場合、この接触により、さらなる磨耗が生じ、おそらくはそれらの支持部自体に反りが生じることになり、これにより、診療台により患者を位置決めする動作の精度が低下するだけではなく、診療台に故障が生じるおそれもある。
【0021】
図4を参照すると、下側支持部98は、診療台82の操作に必要な配線を受容し収容するように設計された2つのチャネル118を備える。幾つかの実施形態において、保持部材122がチャネル118内で配線の上に配置され、配線を定位置に保持し、配線をチャネル118内で直線状にするように作用して、上側支持部94と下側支持部98との間で配線が挟まれる可能性を低減させる。更に、画像の再現性のためにも、配線を直線的かつ一定の位置に保持することが望ましい。保持部材122と配線自体の外側シースとの双方とも耐放射線性材料から構成され、診療台82の高放射線環境における配線の保護および適切な機能を実現する。チャネル118の間隔および設計は、データ線と電力線とを分けるように選択され、2つの線が十分に離間されないときに生じる干渉の問題を回避するようにされる。
【0022】
テーブル・アセンブリ92は、図1に示されるように、X、Y、およびZ方向に移動可能である。ガントリ18および放射線ビーム30に対するテーブル・アセンブリ92の位置決め、従って、患者の位置の位置決めは、患者の適切な部位に放射線が確実に照射されるように、正確なものでなければならない。テーブル・アセンブリ92の動きは、図7ないし図10において示される制御キーパッド140を使用して診療台オペレータにより制御される。ユーザが、キーパッド140のボタン144を作動させると、テーブル・アセンブリ92はユーザの指示で移動することになる。
【0023】
本発明による診療台82の別の特徴は、横方向移動(即ちX方向の移動)が自動的に制御され、テーブル・アセンブリ92の両端部の横方向移動が同期される点である。従来の患者支持テーブルにおいて、横方向運動の調節は、横方向における位置を調節するために手動で回転されるノブまたはねじを使用して、達成される。この調節は、手動式であるばかりでなく、支持テーブルの各端部の調節が個別に行われなければならず、テーブルの端部の位置を同期させる機構は存在しない。これは、一方の端部が他方の端部より極度に横方向の位置へと動かされる場合があるため、患者位置決めエラーを生じさせる可能性があり、横方向における両端部の適正な同期された位置を得ることは非常に困難である。
【0024】
更に、端部を同期させることは、信頼性があり再現可能な撮像結果を確実なものとすることにおいて有効である。患者を撮影するために診療台82上の患者が放射線を受ける本発明のシステムなどのようなシステムでは、放射線源と、画像を生成するためにシステムへデータを供給する検出器との間の経路におけるあらゆるものが、画像の品質に影響を及ぼし得る。上述のテーブル・アセンブリ92の下側に延在する配線は、撮影される画像の品質に支障を及ぼすおそれがあり、画像上のアーティファクト、すなわち、療法士や医師が得られた画像を検討するときに考慮したいであろうアーティファクトとなり得る。上述の下側支持部98のチャネル118は、配線を分離され収容された状態に保つ役割を果たす。チャネル118の位置を認識することに加えて、テーブル・アセンブリ92の端部の動きを同期させることによって、医師/療法士は予測可能なアーティファクトを得ることができ、この予測可能なアーティファクトは、医師/療法士が画像を見たときに効果的に排除することが可能である。なぜなら、それらのアーティファクトは、予測可能な位置にあり、補正可能なものであり、画像が再現可能なものであるからである。同期しない場合には、アーティファクトは、ユーザにとってより大きな妨げとなる。
【0025】
診療台82は、図13に示される本発明の一実施形態による横方向運動制御システム200を備える。横方向運動制御システム200は制御装置204を備え、制御装置204は、テーブル・アセンブリ92の第1の端部212の近くに配置される第1のモータ208と電気的に結合され、かつ、テーブル・アセンブリ92の第2の端部220の近くに配置される第2のモータ216と電気的に結合される。第1のモータ208は、シャフト224と、シャフト224に結合されたエンコーダ228とを備える。第2のモータ216は、シャフト232と、シャフト232に結合されたエンコーダ236とを備える。エンコーダ228、236は、各モータのシャフトの位置データを送るために、制御装置204と通信する。制御装置204は、キーパッド140から動作指示を受け取る。制御装置204はコンピュータ・コードを備え、このコンピュータ・コードは、テーブル・アセンブリ92の両端部で各モータ208、216のシャフト224、232が確実に同期されるように、エンコーダ228、236からの位置データを比較する。制御装置204は、同時に両軸の方向(XおよびY)にテーブル・アセンブリ92を移動させ、この移動と同時にヨー(yaw)を求める。エンコーダ228、236は絶対(アブソリュート)エンコーダであり、これは、同期を可能にするために、SSIや他の適切なタイプのフィードバックなどのようなフィードバックを組み入れる。
【0026】
モータ208、216を、エンコーダ228、236の線形絶対フィードバックと関連して使用することにより、システムは、テーブル・アセンブリ92のヨーイングおよびクラブ運動(横に流される運動)を検出し、その情報をオペレータに対して表示することが可能となる。フィードバックがリニア(線形)であることにより、ユーザは、負荷側で生じていることを理解することも可能となる。このフィードバック情報は全て、上述のようにチャネル118において供給電力からフィードバック・ライン(データ線)を隔離することにより、可能となる。
【0027】
Y軸運動は、ステッピング・モータを使用して制御される。テーブル・アセンブリ92が移動している間、絶対線形フィードバックが使用され、テーブル・アセンブリ92を許容限度内に保持するようにテーブル・アセンブリ92をサーボ制御し、それにより、診療台の動作の制御における精度が向上する。更に、Y軸運動制御は、障害物の検出が可能となる利点や、起きようとしている診療台の衝突(ガントリとなど)の検出が可能となり、衝突前に診療台を停止させられる利点がある。衝突の検出は、診療台位置に関する連続的なダブル・チェッキングにより動的に実施される。あらゆる誤差の伝播が、PCP上でエンドユーザに対して表示される。
【0028】
この発明のさらなる特徴は、以下の特許請求の範囲から見出すことが可能である。
【特許請求の範囲】
【請求項1】
患者支持デバイスであって、
ベースと、
下側支持部と、前記下側支持部に対して移動可能であり第1の端部および第2の端部を含む上側支持部とを備え、患者を支持するように構成されるテーブル・アセンブリと、
前記テーブル・アセンブリと電気的に結合され、前記テーブル・アセンブリが或る軸に沿って第1の方向に、また、前記軸に対して横方向に、また、前記軸に対して垂直方向に動くように指示するように構成される制御装置と、
前記テーブル・アセンブリと電気的に結合される横方向運動制御システムと
を備え、前記横方向運動制御システムは、
前記上側支持部の前記第1の端部に結合されたシャフトを含む第1のモータと、
前記第1のモータの前記シャフトと結合され、前記シャフトの第1の位置を検出するように構成される第1のエンコーダと、
前記上側支持部の前記第2の端部に結合されたシャフトを含む第2のモータと、
前記第2のモータの前記シャフトと結合され、前記シャフトの第2の位置を検出するように構成された第2のエンコーダとを備え、
前記制御装置は、前記第1の位置および前記第2の位置を受け取り、比較するように構成され、前記制御装置は、前記第1の位置および前記第2の位置を実質的に同期させるように、前記第1のモータおよび前記第2のモータへ指示を通信するように構成される、
患者支持デバイス。
【請求項2】
請求項1に記載の患者支持デバイスであって、前記テーブル・アセンブリと結合されるキーパッドを更に備え、前記制御装置は、前記第1の位置および前記第2の位置を実質的に同期させるように、前記キーパッドを介したユーザからの指示を受け取るように構成される、患者支持デバイス。
【請求項3】
請求項1に記載の患者支持デバイスであって、前記横方向運動制御システムは、前記上側支持部が前記軸に対して横方向に動かされる際に、前記上側支持部のヨー運動を検出するように構成される、患者支持デバイス。
【請求項4】
請求項1に記載の患者支持デバイスであって、前記横方向運動制御システムは、前記上側支持部が前記軸に対して横方向に動かされる際に、前記上側サポートのクラブ運動を検出するように構成される、患者支持デバイス。
【請求項5】
請求項1に記載の患者支持デバイスであって、前記テーブル・アセンブリと電気的に結合され、前記軸に対して垂直方向に前記上側支持部を動かすように構成されたステッピング・モータを更に備える、患者支持デバイス。
【請求項6】
放射線療法用治療システムにおいて、
ガントリと、
下側支持部と、前記下側支持部に対して移動可能であり第1の端部および第2の端部を備える上側支持部とを備え、患者を支持するように構成されたテーブル・アセンブリと、
前記テーブル・アセンブリと電気的に結合され、前記テーブル・アセンブリがガントリ内への第1の方向に、また、前記第1の方向に対して横方向に、また、前記第1の方向に対して垂直方向に動くよう指示するように構成される制御装置と、
前記テーブル・アセンブリと電気的に結合され、前記上側支持部の前記第1の端部の位置および前記上側支持部の前記第2の端部の位置を検出し、前記第1の端部の位置および前記第2の端部の位置を出力するように構成される横方向運動制御システムと
を備える放射線療法用治療システム。
【請求項7】
請求項6に記載の放射線療法用治療システムであって、前記横方向運動制御システムは、前記第1の端部の位置と前記第2の端部の位置とを比較するように構成される、放射線療法用治療システム。
【請求項8】
請求項7に記載の放射線療法用治療システムであって、前記横方向運動制御システムは、前記第1の端部の位置および前記第2の端部の位置を同期させるように、前記制御装置に対して指示を通信するように構成される、放射線療法用治療システム。
【請求項9】
請求項6に記載の放射線療法用治療システムであって、前記横方向運動制御システムは、前記第1の端部の位置および前記第2の端部の位置を同期させるように、前記制御装置に対して指示を通信するように構成される、放射線療法用治療システム。
【請求項10】
請求項6に記載の放射線療法用治療システムであって、前記制御装置は、前記テーブル・アセンブリを、前記第1の方向、前記第1の方向に対する横方向、および前記第1の方向に対する垂直方向のうちの1つの方向に動かすように、キーパッドを介してユーザからの指示を受け取るように構成される、放射線療法用治療システム。
【請求項11】
請求項10に記載の放射線療法用治療システムであって、前記制御装置は、前記第1の端部の位置と前記第2の端部の位置とを同期させるようにキーパッドを介してユーザからの指示を受け取るように構成される、放射線療法用治療システム。
【請求項12】
請求項6に記載の放射線療法用治療システムであって、前記制御装置は、前記第1の端部の位置と前記第2の端部の位置とを同期させるようにキーパッドを介してユーザからの指示を受け取るように更に構成される、放射線療法用治療システム。
【請求項13】
請求項6に記載の放射線療法用治療システムであって、前記横方向運動制御システムは、前記上側支持部の前記第1の端部に結合されるシャフトを含む第1のモータと、前記第1のモータの前記シャフトに結合され、前記シャフトの第1の位置を検出するように構成された第1のエンコーダと、前記上側支持部の第2の端部に結合されたシャフトを含む第2のモータと、前記第2のモータの前記シャフトに結合され、前記シャフトの第2の位置を検出するように構成された第2のエンコーダとを備える、放射線療法用治療システム。
【請求項14】
請求項13に記載の放射線療法用治療システムであって、前記制御装置は、前記第1の位置および前記第2の位置を受け取り、比較するように構成され、前記制御装置は、前記第1の位置および前記第2の位置を実質的に同期させるように、前記第1のモータおよび前記第2のモータへ指示を通信するように構成される、放射線療法用治療システム。
【請求項15】
放射線療法用治療システム用のテーブル・アセンブリの第1の端部の位置を検出するステップと、
前記テーブル・アセンブリの第2の端部の位置を検出するステップと、
前記第1の端部の前記位置と前記第2の端部の前記位置とを比較するステップと、
前記第1の端部の前記位置と前記第2の端部の前記位置とを実質的に同期させるステップと
を備える方法。
【請求項16】
請求項15に記載の方法であって、前記第1の端部の前記位置と前記第2の端部の前記位置とを実質的に同期させる前記ステップは、前記テーブル・アセンブリを移動の際に実施される、方法。
【請求項17】
請求項16に記載の方法であって、前記テーブル・アセンブリの前記移動は、前記テーブル・アセンブリを支持するベースに対しての横方向になされるものである、方法。
【請求項1】
患者支持デバイスであって、
ベースと、
下側支持部と、前記下側支持部に対して移動可能であり第1の端部および第2の端部を含む上側支持部とを備え、患者を支持するように構成されるテーブル・アセンブリと、
前記テーブル・アセンブリと電気的に結合され、前記テーブル・アセンブリが或る軸に沿って第1の方向に、また、前記軸に対して横方向に、また、前記軸に対して垂直方向に動くように指示するように構成される制御装置と、
前記テーブル・アセンブリと電気的に結合される横方向運動制御システムと
を備え、前記横方向運動制御システムは、
前記上側支持部の前記第1の端部に結合されたシャフトを含む第1のモータと、
前記第1のモータの前記シャフトと結合され、前記シャフトの第1の位置を検出するように構成される第1のエンコーダと、
前記上側支持部の前記第2の端部に結合されたシャフトを含む第2のモータと、
前記第2のモータの前記シャフトと結合され、前記シャフトの第2の位置を検出するように構成された第2のエンコーダとを備え、
前記制御装置は、前記第1の位置および前記第2の位置を受け取り、比較するように構成され、前記制御装置は、前記第1の位置および前記第2の位置を実質的に同期させるように、前記第1のモータおよび前記第2のモータへ指示を通信するように構成される、
患者支持デバイス。
【請求項2】
請求項1に記載の患者支持デバイスであって、前記テーブル・アセンブリと結合されるキーパッドを更に備え、前記制御装置は、前記第1の位置および前記第2の位置を実質的に同期させるように、前記キーパッドを介したユーザからの指示を受け取るように構成される、患者支持デバイス。
【請求項3】
請求項1に記載の患者支持デバイスであって、前記横方向運動制御システムは、前記上側支持部が前記軸に対して横方向に動かされる際に、前記上側支持部のヨー運動を検出するように構成される、患者支持デバイス。
【請求項4】
請求項1に記載の患者支持デバイスであって、前記横方向運動制御システムは、前記上側支持部が前記軸に対して横方向に動かされる際に、前記上側サポートのクラブ運動を検出するように構成される、患者支持デバイス。
【請求項5】
請求項1に記載の患者支持デバイスであって、前記テーブル・アセンブリと電気的に結合され、前記軸に対して垂直方向に前記上側支持部を動かすように構成されたステッピング・モータを更に備える、患者支持デバイス。
【請求項6】
放射線療法用治療システムにおいて、
ガントリと、
下側支持部と、前記下側支持部に対して移動可能であり第1の端部および第2の端部を備える上側支持部とを備え、患者を支持するように構成されたテーブル・アセンブリと、
前記テーブル・アセンブリと電気的に結合され、前記テーブル・アセンブリがガントリ内への第1の方向に、また、前記第1の方向に対して横方向に、また、前記第1の方向に対して垂直方向に動くよう指示するように構成される制御装置と、
前記テーブル・アセンブリと電気的に結合され、前記上側支持部の前記第1の端部の位置および前記上側支持部の前記第2の端部の位置を検出し、前記第1の端部の位置および前記第2の端部の位置を出力するように構成される横方向運動制御システムと
を備える放射線療法用治療システム。
【請求項7】
請求項6に記載の放射線療法用治療システムであって、前記横方向運動制御システムは、前記第1の端部の位置と前記第2の端部の位置とを比較するように構成される、放射線療法用治療システム。
【請求項8】
請求項7に記載の放射線療法用治療システムであって、前記横方向運動制御システムは、前記第1の端部の位置および前記第2の端部の位置を同期させるように、前記制御装置に対して指示を通信するように構成される、放射線療法用治療システム。
【請求項9】
請求項6に記載の放射線療法用治療システムであって、前記横方向運動制御システムは、前記第1の端部の位置および前記第2の端部の位置を同期させるように、前記制御装置に対して指示を通信するように構成される、放射線療法用治療システム。
【請求項10】
請求項6に記載の放射線療法用治療システムであって、前記制御装置は、前記テーブル・アセンブリを、前記第1の方向、前記第1の方向に対する横方向、および前記第1の方向に対する垂直方向のうちの1つの方向に動かすように、キーパッドを介してユーザからの指示を受け取るように構成される、放射線療法用治療システム。
【請求項11】
請求項10に記載の放射線療法用治療システムであって、前記制御装置は、前記第1の端部の位置と前記第2の端部の位置とを同期させるようにキーパッドを介してユーザからの指示を受け取るように構成される、放射線療法用治療システム。
【請求項12】
請求項6に記載の放射線療法用治療システムであって、前記制御装置は、前記第1の端部の位置と前記第2の端部の位置とを同期させるようにキーパッドを介してユーザからの指示を受け取るように更に構成される、放射線療法用治療システム。
【請求項13】
請求項6に記載の放射線療法用治療システムであって、前記横方向運動制御システムは、前記上側支持部の前記第1の端部に結合されるシャフトを含む第1のモータと、前記第1のモータの前記シャフトに結合され、前記シャフトの第1の位置を検出するように構成された第1のエンコーダと、前記上側支持部の第2の端部に結合されたシャフトを含む第2のモータと、前記第2のモータの前記シャフトに結合され、前記シャフトの第2の位置を検出するように構成された第2のエンコーダとを備える、放射線療法用治療システム。
【請求項14】
請求項13に記載の放射線療法用治療システムであって、前記制御装置は、前記第1の位置および前記第2の位置を受け取り、比較するように構成され、前記制御装置は、前記第1の位置および前記第2の位置を実質的に同期させるように、前記第1のモータおよび前記第2のモータへ指示を通信するように構成される、放射線療法用治療システム。
【請求項15】
放射線療法用治療システム用のテーブル・アセンブリの第1の端部の位置を検出するステップと、
前記テーブル・アセンブリの第2の端部の位置を検出するステップと、
前記第1の端部の前記位置と前記第2の端部の前記位置とを比較するステップと、
前記第1の端部の前記位置と前記第2の端部の前記位置とを実質的に同期させるステップと
を備える方法。
【請求項16】
請求項15に記載の方法であって、前記第1の端部の前記位置と前記第2の端部の前記位置とを実質的に同期させる前記ステップは、前記テーブル・アセンブリを移動の際に実施される、方法。
【請求項17】
請求項16に記載の方法であって、前記テーブル・アセンブリの前記移動は、前記テーブル・アセンブリを支持するベースに対しての横方向になされるものである、方法。
【図3】

【図8】
【図9】
【図10】
【図11】
【図1】
【図2】
【図4】
【図5】
【図6】
【図7】
【図12】
【図13】
【図8】
【図9】
【図10】
【図11】
【図1】
【図2】
【図4】
【図5】
【図6】
【図7】
【図12】
【図13】
【公表番号】特表2010−537784(P2010−537784A)
【公表日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願番号】特願2010−524143(P2010−524143)
【出願日】平成20年9月4日(2008.9.4)
【国際出願番号】PCT/US2008/075269
【国際公開番号】WO2009/032935
【国際公開日】平成21年3月12日(2009.3.12)
【出願人】(506024320)トモセラピー・インコーポレーテッド (27)
【Fターム(参考)】
【公表日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願日】平成20年9月4日(2008.9.4)
【国際出願番号】PCT/US2008/075269
【国際公開番号】WO2009/032935
【国際公開日】平成21年3月12日(2009.3.12)
【出願人】(506024320)トモセラピー・インコーポレーテッド (27)
【Fターム(参考)】
[ Back to top ]