
情報端末、プログラムおよび運転支援方法
【課題】ユーザに対して、所定の条件を満たすことにより通行可能となる車線の出入口で適切に案内できる技術を提供する。
【解決手段】情報端末は、所定の条件を満たすことにより通行可能となる車線の設置状況を含む車線情報を記憶する記憶手段と、所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定手段と、前記車線情報欠損判定手段により欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完手段と、を備える。
【解決手段】情報端末は、所定の条件を満たすことにより通行可能となる車線の設置状況を含む車線情報を記憶する記憶手段と、所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定手段と、前記車線情報欠損判定手段により欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、情報端末の技術に関するものである。
【背景技術】
【0002】
従来、ナビゲーション装置では、HOV(High−Occupancy Vehicles)レーン等の特定の条件を満たす車両のみが走行可能な車線に対応する経路誘導の技術が用いられている。当該技術では、HOVレーンを走行していない状態においてHOVレーンへの進入口があるとHOVレーン入口の案内を行い、HOVレーンを走行している状態においてHOVレーンの退出口があるとHOVレーン出口の案内を行う。特許文献1には、このようなナビゲーション装置についての技術が記載されている。なお、HOVレーンは、カープールレーンとも呼ばれる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−145282号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなナビゲーション装置では、実際にはHOVレーンが途切れずに継続しているにもかかわらず、地図情報からはHOVレーンの情報が欠落している区間においては、HOVレーンの出入口を案内してしまうこととなるが、実際にはHOVレーン出入り可能な出入口は限定されているため、不都合が起こる場合がある。
【0005】
本発明の目的は、ユーザに対して、所定の条件を満たすことにより通行可能となる車線の出入口において適切に案内できる技術を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決すべく、本発明に係る情報端末は、所定の条件を満たすことにより通行可能となる車線(以下条件付き車線という)の設置状況を含む車線情報を記憶する記憶手段と、所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定手段と、前記車線情報欠損判定手段により欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完手段と、を備えることを特徴とする。
【0007】
また、本発明に係るプログラムは、コンピュータに、運転を支援する手順を実行させるプログラムであって、前記コンピュータを、制御手段と、所定の条件を満たすことにより通行可能となる車線の設置状況を含む車線情報を記憶する記憶手段として機能させ、前記制御手段に対して、所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定手順と、前記車線情報欠損判定手順により欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完手順と、を実行させることを特徴とする。
【0008】
また、本発明に係る運転支援方法は、情報端末による運転支援方法であって、前記情報端末は、所定の条件を満たすことにより通行可能となる車線の設置状況を含む車線情報を記憶する記憶手段を備え、所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定ステップと、前記車線情報欠損判定ステップにより欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完ステップと、を実施することを特徴とする。
【発明の効果】
【0009】
本願発明によれば、所定の条件を満たすことにより通行可能となる車線の出入口で適切に案内できるナビゲーション技術を提供することが可能となる。
【図面の簡単な説明】
【0010】
【図1】第一の実施形態に係るナビゲーション装置の概略構成図である。
【図2】リンクテーブルの構成を示す図である。
【図3】演算処理部の機能構成図である。
【図4】HOV補完処理のフロー図である。
【図5】HOVレーン情報が欠損している道路の例を示す図である。
【図6】HOVレーン情報の補完の例を示す図である。
【図7】HOVレーン情報の補完の効果の例を示す図である。
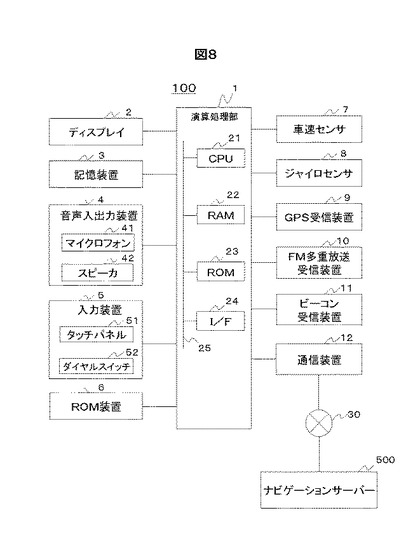
【図8】第二の実施形態に係るナビゲーションシステムの概略構成図である。
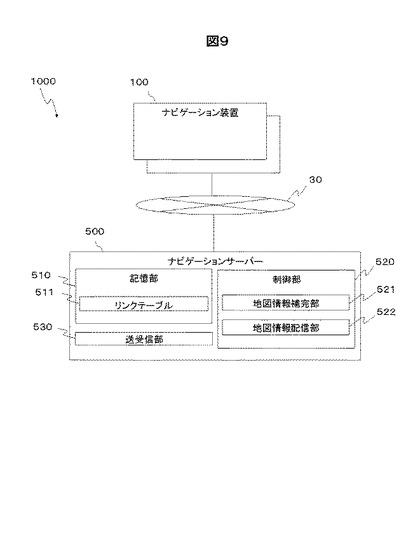
【図9】ナビゲーションサーバーの概略構成図である。
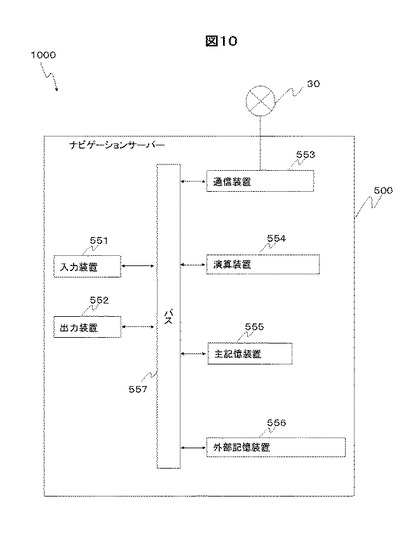
【図10】ナビゲーションサーバーのハードウェア構成例を示す図である。
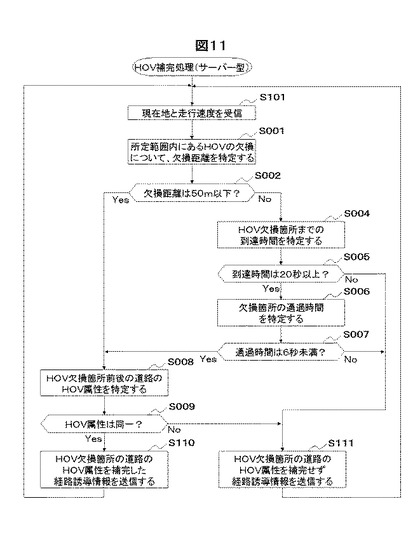
【図11】第二の実施形態に係るHOV補完処理のフロー図である。
【発明を実施するための形態】
【0011】
以下に、本発明の第一の実施形態を適用したナビゲーション装置について、図面を参照して説明する。
【0012】
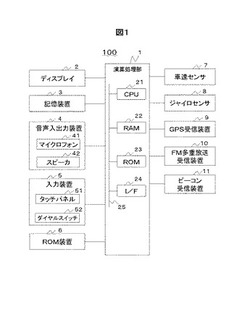
図1に、ナビゲーション装置100の全体構成図を示す。ナビゲーション装置100は、地図情報を表示して、ナビゲーション装置100の現在地を示す地点と、設定された目的地までの経路を誘導する情報とを示すことが可能ないわゆるナビゲーション装置である。
【0013】
ナビゲーション装置100は、演算処理部1と、ディスプレイ2と、記憶装置3と、音声入出力装置4(音声入力装置としてマイクロフォン41、音声出力装置としてスピーカ42を備える)と、入力装置5と、ROM装置6と、車速センサ7と、ジャイロセンサ8と、GPS(Global Positioning System)受信装置9と、FM多重放送受信装置10と、ビーコン受信装置11と、を備えている。
【0014】
演算処理部1は、様々な処理を行う中心的ユニットである。例えば各種センサ7,8やGPS受信装置9、FM多重放送受信装置10等から出力される情報に基づいて現在地を算出する。また、得られた現在地情報に基づいて、表示に必要な地図データを記憶装置3あるいはROM装置6から読み出す。
【0015】
また、演算処理部1は、読み出した地図データをグラフィックス展開し、そこに現在地を示すマークを重ねてディスプレイ2へ表示する。また、記憶装置3あるいはROM装置6に記憶されている地図データ等を用いて、ユーザから指示された出発地又は現在地と、目的地(または、経由地や立ち寄り地)とを結ぶ最適な経路(推奨経路)を探索する。また、スピーカ42やディスプレイ2を用いてユーザを誘導する。
【0016】
また、演算処理部1は、経路誘導を行う際に、HOV(High−OccupancyVehicles)レーンへの出入り口の走行を案内することができる。なお、HOVレーンは、乗車人数が規定の乗車人数(例えば運転者を含めて2人)以上である車両や、特定の基準(低燃費、あるいは低公害)を満たす車両のみが走行可能として規定された車線のことである。
【0017】
ナビゲーション装置100の演算処理部1は、各デバイス間をバス25で接続した構成である。演算処理部1は、数値演算及び各デバイスを制御するといった様々な処理を実行するCPU(Central Processing Unit)21と、記憶装置3から読み出した地図データ、演算データなどを格納するRAM(Random Access Memory)22と、プログラムやデータを格納するROM(Read Only Memory)23と、各種ハードウェアを演算処理部1と接続するためのI/F(インターフェイス)24と、を有する。
【0018】
ディスプレイ2は、演算処理部1等で生成されたグラフィックス情報を表示するユニットである。ディスプレイ2は、液晶ディスプレイ、有機ELディスプレイなどで構成される。
【0019】
記憶装置3は、HDD(Hard Disk Drive)や不揮発性メモリカードといった、少なくとも読み書きが可能な記憶媒体で構成される。
【0020】
この記憶媒体には、通常の経路探索装置に必要な地図データ(地図上の道路を構成するリンクのリンクデータを含む)であるリンクテーブル200が記憶されている。
【0021】
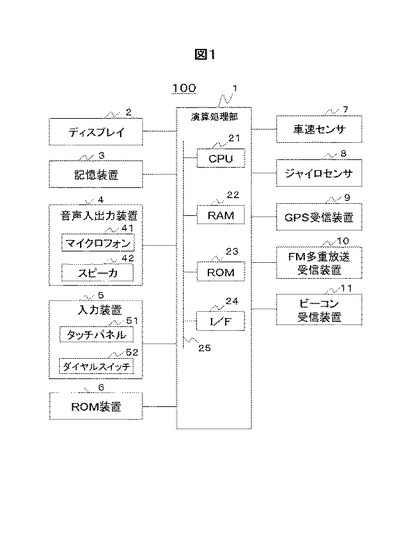
図2は、リンクテーブル200の構成を示す図である。リンクテーブル200は、地図上の区画された領域であるメッシュの識別コード(メッシュID)201ごとに、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ202を含んでいる。
【0022】
リンクデータ202は、リンクの識別子であるリンクID211ごとに、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報222、リンクを含む道路の種別を示す道路種別223、リンクの長さを示すリンク長224、予め記憶されたリンク旅行時間225、開始接続リンクおよび終了接続リンク226、リンクを含む道路の制限速度を示す制限速度227、リンクごとのHOVレーンの設置状況に関する属性を特定するHOV属性228などを含んでいる。なお、開始接続リンクおよび終了接続リンク226は、当該リンクの開始ノードに接続するリンクである開始接続リンクと、当該リンクの終了ノードに接続するリンクである終了接続リンクと、を特定する情報である。
【0023】
HOV属性228は、当該リンクがHOVレーンのみから構成されている道路である場合には、「専用」の属性231を備え、当該リンクがHOVレーンを備えない道路である場合には、「無」の属性233を備える。また、当該リンクがHOVレーンと通常レーンとを併せて有するものである場合には、「共用」の属性232を備える。また、「専用」の属性231と、「共用」の属性232と、「無」の属性233とが、後述するHOV補完処理により補完された属性の情報であるか否かを特定する補完有無234を備える。すなわち、HOV属性228には、HOVレーンの設置状況を特定する情報が格納されるといえる。なお、HOV属性228の情報は、「専用」の属性231と、「共用」の属性232と、「無」の属性233のいずれも格納されておらず、かつ、補完有無234に補完有の情報が格納されていない場合には、当該リンクについてHOV属性が欠落している、といえる。
【0024】
なお、ここでは、リンクを構成する2つのノードについて開始ノードと終了ノードとを区別することで、同じ道路の上り方向と下り方向とを、それぞれ別のリンクとして管理するようにしている。
【0025】
図1に戻って説明する。音声入出力装置4は、音声入力装置としてマイクロフォン41と、音声出力装置としてスピーカ42と、を備える。マイクロフォン41は、ユーザやその他の搭乗者が発した声などのナビゲーション装置100の外部の音声を取得する。
【0026】
スピーカ42は、演算処理部1で生成されたユーザへのメッセージを音声として出力する。マイクロフォン41とスピーカ42は、車両の所定の部位に、別個に配されている。ただし、一体の筐体に収納されていても良い。ナビゲーション装置100は、マイクロフォン41及びスピーカ42を、それぞれ複数備えることができる。
【0027】
入力装置5は、ユーザからの指示をユーザによる操作を介して受け付ける装置である。入力装置5は、タッチパネル51と、ダイヤルスイッチ52と、その他のハードスイッチ(図示しない)であるスクロールキー、縮尺変更キーなどで構成される。また、入力装置5には、ナビゲーション装置100に対して遠隔で操作指示を行うことができるリモートコントローラが含まれる。リモートコントローラは、ダイヤルスイッチやスクロールキー、縮尺変更キーなどを備え、各キーやスイッチが操作された情報をナビゲーション装置100に送出することができる。
【0028】
タッチパネル51は、ディスプレイ2の表示面側に搭載され、表示画面を透視可能である。タッチパネル51は、ディスプレイ2に表示された画像のXY座標と対応したタッチ位置を特定し、タッチ位置を座標に変換して出力する。タッチパネル51は、感圧式または静電式の入力検出素子などにより構成される。
【0029】
ダイヤルスイッチ52は、時計回り及び反時計回りに回転可能に構成され、所定の角度の回転ごとにパルス信号を発生し、演算処理部1に出力する。演算処理部1では、パルス信号の数から、回転角度を求める。
【0030】
ROM装置6は、CD-ROMやDVD-ROM等のROM(Read Only Memory)や、IC(Integrated Circuit)カードといった、少なくとも読み取りが可能な記憶媒体で構成されている。この記憶媒体には、例えば、動画データや、音声データなどが記憶されている。
【0031】
車速センサ7,ジャイロセンサ8およびGPS受信装置9は、ナビゲーション装置100で現在地(自車位置)を検出するために使用されるものである。車速センサ7は、車速を算出するのに用いる値を出力するセンサである。ジャイロセンサ8は、光ファイバジャイロや振動ジャイロ等で構成され、移動体の回転による角速度を検出するものである。GPS受信装置9は、GPS衛星からの信号を受信し移動体とGPS衛星間の距離と距離の変化率とを3個以上の衛星に対して測定することで移動体の現在地、進行速度および進行方位を測定するものである。
【0032】
FM多重放送受信装置10は、FM放送局から送られてくるFM多重放送信号を受信する。FM多重放送には、VICS(Vehicle Information Communication System:登録商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などやFM多重一般情報としてラジオ局が提供する文字情報などがある。
【0033】
ビーコン受信装置11は、VICS情報などの概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報や緊急警報などを受信する。例えば、光により通信する光ビーコン、電波により通信する電波ビーコン等の受信装置である。
【0034】
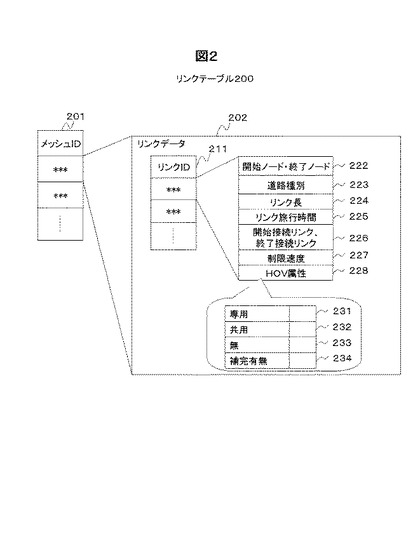
図3は、演算処理部1の機能ブロック図である。図示するように、演算処理部1は、基本制御部101と、入力受付部102と、出力処理部103と、HOV欠損判定部104と、HOV情報補完部105と、HOV出入口案内部106と、を有する。
【0035】
基本制御部101は、様々な処理を行う中心的な機能部であり、処理内容に応じて、他の処理部を制御する。また、各種センサ、GPS受信装置9等の情報を取得し、マップマッチング処理等を行って現在地を特定する。また、随時、走行した日付および時刻と、位置と、を対応付けて、リンクごとに走行履歴を記憶装置3に記憶する。さらに、各処理部からの要求に応じて、現在時刻を出力する。
【0036】
また、基本制御部101は、ユーザから指示された出発地又は現在地と、目的地とを結ぶ最適な経路(推奨経路)を探索する。当該経路探索においては、ダイクストラ法等の経路探索ロジックを用いて、道路の所定の区間(リンク)に対して予め設定されたリンクコストに基づいて経路を探索する。なお、当該処理においては、HOVレーンを利用する経路を考慮せずに、リンクコストが最小となる経路を探索する。
【0037】
また、基本制御部101は、車両の現在地が推奨経路から逸脱しないよう、スピーカ42やディスプレイ2を用いてユーザの運転操作を誘導する。また、基本制御部101は、HOV出入口案内部106に対して、HOVレーン入口への誘導や、通常レーンへの出口の誘導を行うよう指示する。
【0038】
入力受付部102は、入力装置5またはマイクロフォン41を介して入力されたユーザからの指示を受け付け、その要求内容に対応する処理を実行するように演算処理部1の各部を制御する。例えば、ユーザが推奨経路の探索を要求したときは、目的地を設定するため、地図をディスプレイ2に表示する処理を出力処理部103に要求する。
【0039】
出力処理部103は、例えばポリゴン情報等の表示させる画面情報を受け取り、ディスプレイ2に描画するための信号に変換してディスプレイ2に対して描画する指示を行う。
【0040】
HOV欠損判定部104は、所定区間の道路を構成するリンクについて、道路情報からHOV情報が欠損している道路であるのか、それとも実際に当該リンクに相当する道路はHOV情報の欠損は無い道路であるのかを判定する。
【0041】
HOV情報補完部105は、所定区間の道路を構成するリンクについて、道路情報からHOV情報が欠損している道路である場合に、当該区間の道路のHOV情報を、前後の区間の道路等から推測し、HOV情報を補完する。なお、HOV情報補完部105によりHOV情報が補完されたリンクは、補完されたHOV情報を有することを特定可能なように、補完の有無を特定する情報が対応付けられて記憶される。
【0042】
HOV出入口案内部106は、HOVレーンの出入り口におけるHOVレーンと通常レーンとの間の出入りに関して、ユーザに対して案内を行う。具体的には、HOV出入口案内部106は、HOVレーンの出入り口(一般的には、出口、入口は共用される)において、HOVレーンに進入すべき旨、HOVレーンから退出すべき旨、あるいは走行レーンを維持すべき旨等をユーザに対して音声・画像等を用いて案内する。またその案内においては、HOV出入口案内部106は、HOVレーンではないリンクあるいはHOVレーン情報が欠落しているリンクを出入口であるとして案内する。また、HOV出入口案内部106は、HOVレーン情報が補完されたリンクについて、当該リンクに基づくHOVレーンの走行についての案内を抑止する。
【0043】
すなわち、HOV出入口案内部106は、HOVレーン情報が設定されていないリンクについて、出入口の案内を行う対象として案内を行い、HOVレーン情報が設定されているリンクあるいはHOVレーン情報が補完されたリンクについては、出入口の案内を行う対象として案内を行う。
【0044】
上記した演算処理部1の各機能部、すなわち基本制御部101、入力受付部102、出力処理部103、HOV欠損判定部104、HOV情報補完部105、HOV出入口案内部106は、CPU21が所定のプログラムを読み込み実行することにより構築される。そのため、RAM22には、各機能部の処理を実現するためのプログラムが記憶されている。
【0045】
なお、上記した各構成要素は、ナビゲーション装置100の構成を、理解を容易にするために、主な処理内容に応じて分類したものである。そのため、構成要素の分類の仕方やその名称によって、本願発明が制限されることはない。ナビゲーション装置100の構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、1つの構成要素がさらに多くの処理を実行するように分類することもできる。
【0046】
また、各機能部は、ハードウェア(ASIC、GPUなど)により構築されてもよい。また、各機能部の処理が一つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
【0047】
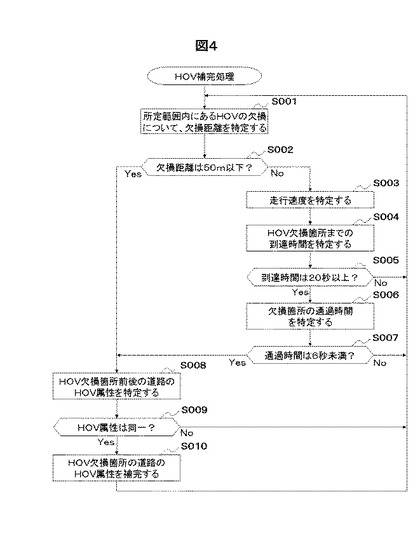
[動作の説明]次に、ナビゲーション装置100が実施するHOV補完処理の動作について説明する。図4は、ナビゲーション装置100が実施するHOV補完処理を示すフロー図である。このフローは、ナビゲーション装置100に電源が投入されて、ナビゲーション装置100が起動すると開始される。
【0048】
まず、HOV欠損判定部104は、現在地から所定範囲内(例えば、1km以内)にあるHOV属性28の欠損箇所について、欠損距離を特定する(ステップS001)。具体的には、HOV欠損判定部104は、基本制御部101に対して、現在地を特定する位置情報を要求して取得し、所定範囲内に含まれるリンクを抽出する。抽出した各リンクについて、HOV属性228の情報が、「専用」の属性231、「共用」の属性232、「無」の属性233のいずれでもない場合には、当該リンクを欠損箇所であるとして特定し、当該欠損箇所を構成するリンクのリンク長224を欠損距離として特定する。なお、HOV欠損判定部104は、HOV属性228の情報が、「専用」の属性231、「共用」の属性232、「無」の属性233のいずれでもないリンクが連続して接続されている場合には、連続して接続された複数のリンクの集合を欠損箇所として特定し、欠損箇所を構成するそれぞれのリンク長を合算して欠損距離として特定する。
【0049】
次に、HOV情報補完部105は、欠損距離が所定距離(例えば、50メートル)以下であるか否かを判定する(ステップS002)。具体的には、HOV情報補完部105は、ステップS001において特定した欠損箇所について、欠損距離が所定距離(例えば、50メートル)以下であるか否かを判定する。そして、HOV情報補完部105は、当該ステップ以降のステップS003〜ステップS010の処理を、欠損箇所ごとに実施する。
【0050】
欠損距離が所定距離以下ではない場合(ステップS002にて「No」の場合)には、HOV情報補完部105は、走行速度を特定する(ステップS003)。具体的には、HOV情報補完部105は、基本制御部101に対して、処理時点での走行速度を問い合わせる。基本制御部101は、ECU(Engine Control Unit)等から出力される速度の情報を取得して、HOV情報補完部105へ受け渡す。
【0051】
HOV情報補完部105は、対象としているHOV欠損箇所までの到達時間を特定する(ステップS004)。具体的には、HOV情報補完部105は、現在地からHOV欠損箇所の開始ノードまでの距離を特定し、走行速度で除算して到達時間を特定する。
【0052】
HOV情報補完部105は、到達時間が所定時間(例えば、20秒)以上であるか否かを判定する(S005)。到達時間が所定時間よりも短い場合には、HOV情報補完部105は、対象の欠損箇所についてのHOV属性情報の補完は行わず、他に欠損箇所が無ければステップS001へ制御を戻す。
【0053】
到達時間が所定時間以上である場合(ステップS005にて「Yes」)には、HOV情報補完部105は、欠損箇所の通過時間を特定する(ステップS006)。具体的には、HOV情報補完部105は、対象の欠損箇所の欠損距離を、走行速度で除算して通過にかかる時間を特定する。
【0054】
そして、HOV情報補完部105は、通過時間が所定時間(例えば、6秒)未満であるか否かを判定する(ステップS007)。通過時間が所定時間未満でない場合には、HOV情報補完部105は、対象の欠損箇所についてのHOV属性情報の補完は行わず、他に欠損箇所が無ければステップS001へ制御を戻す。
【0055】
通過時間が所定時間未満の場合(ステップS007にて「Yes」)には、HOV情報補完部105は、対象の欠損箇所の前後に接続される道路のHOV属性を特定する(ステップS008)。具体的には、HOV情報補完部105は、対象の欠損箇所を構成するリンクのうち、開始接続リンクにHOV情報の欠損がないリンクを欠損箇所の前に接続される道路とし、終了接続リンクにHOV情報の欠損がないリンクを欠損箇所の後に接続される道路とする。そして、HOV情報補完部105は、欠損箇所の前に接続される道路を構成するリンクのHOV属性228と、欠損箇所の後に接続される道路を構成するリンクのHOV属性228と、をリンクテーブル200から読み出す。なお、一般に、欠損箇所の前に接続される道路は、HOVの終端を構成し、欠損箇所の後に接続される道路は、HOVの開始端を構成する。
【0056】
HOV情報補完部105は、欠損箇所の前に接続される道路を構成するリンクのHOV属性228と、欠損箇所の後に接続される道路を構成するリンクのHOV属性228と、を比較し、同一であるか否かを判定する(ステップS009)。具体的には、HOV情報補完部105は、欠損箇所の前に接続される道路を構成するリンクのHOV属性228と、欠損箇所の後に接続される道路を構成するリンクのHOV属性228とが、互いに「専用」の属性231である場合、互いに「共用」の属性232である場合、互いに「無」の属性233である場合には、HOV属性が同一であると判定する。HOV属性が同一ではない場合には、HOV情報補完部105は、対象の欠損箇所についてのHOV属性情報の補完は行わず、他に欠損箇所が無ければステップS001へ制御を戻す。
【0057】
HOV情報補完部105は、HOV属性が同一である場合(ステップS009にて「Yes」の場合)には、欠損箇所を構成する道路のHOV属性を補完する(ステップS010)。そして、HOV情報補完部105は、他に欠損箇所が無ければステップS001へ制御を戻す。具体的には、HOV情報補完部105は、対象の欠損箇所を構成する一つまたは複数のリンクのHOV属性228に、欠損箇所の前に接続される道路を構成するリンクのHOV属性228の情報と同一の情報を格納する。そして、HOV情報補完部105は、補完有無234に補完があったことを特定する情報を格納する。
【0058】
以上が、HOV補完処理の処理フローである。HOV補完処理によれば、HOV属性の情報を有しない道路の部分について、当該部分が所定の距離未満である場合には、その直前の道路のHOV属性を用いてHOV属性情報を補完することができる。または、HOV属性の情報を有しない道路の部分が所定の距離以上であっても、当該部分へ到達するまでに所定の時間的余裕があり、当該部分を通過するのにかかる時間が短い場合には、その直前の道路のHOV属性を用いてHOV属性情報を補完することができる。なお、当該補完においては、欠損箇所の前に接続される道路を構成するリンクのHOV属性228と、欠損箇所の後に接続される道路を構成するリンクのHOV属性228とが、互いに同一のHOV属性を有する場合に補完を行う。
【0059】
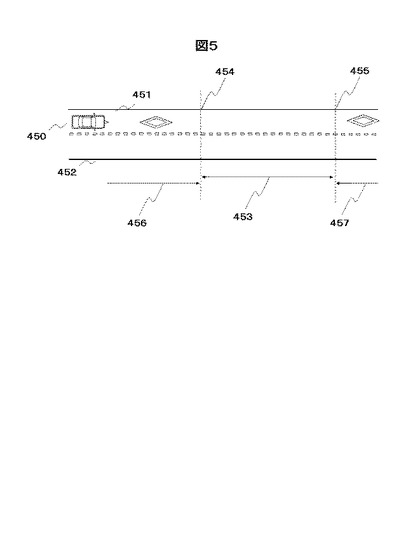
図5は、HOVレーン情報が欠損している道路の例を示す図である。当該例では、自車450はHOVレーン451を走行している状態である。また、当該例の道路は、HOVレーン451には、HOVレーンでない通常の走行車線452が併設されるいわゆる「共用」の属性を有する直近リンク456と、直近リンク456の終了端454において直近リンク456と接続される第二のリンク453と、第二のリンク453の終了端455において第二のリンク453に接続される第三のリンク457と、により構成される。そして、第二のリンク453にはHOVレーン属性の情報が欠損しており、第三のリンク457は、直近リンク456と同様のHOVレーン属性を有しているものとする。なお、第二のリンク453は、リンク長が50メートルを超えている(例えば、100メートル)ものとする。
【0060】
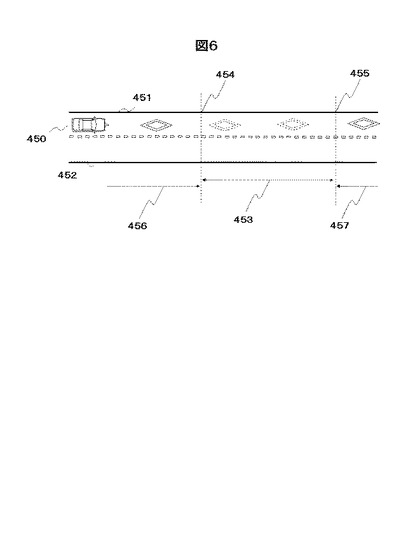
図6は、HOVレーン情報の補完処理の例を示す図である。当該例では、図5に示した道路において、第二のリンク453のHOVレーン属性が補完されている。すなわち、第二のリンク453は、直近リンク456と同様のHOVレーン属性を有する。上述したように、走行速度および第二のリンク453までの距離に応じて当該補完がなされるか否かの結果が異なるが、図6は、補完がなされる状態を示している。
【0061】
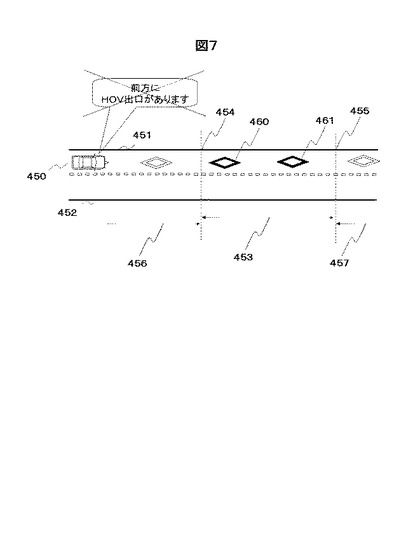
図7は、HOVレーン情報の補完の効果の例を示す図である。当該例では、図6に示した補完の処理の例により、第二のリンク453のHOVレーン属性の情報が補完された場合の出力例を示している。すなわち、第二のリンク453のHOVレーン属性が補完された結果、HOV出入口案内部106により、第二のリンク453についても直近リンク456と同様にHOVレーンであると判定され、HOV出入口案内部106は、HOVレーンを示す標識460、461等を画面上に表示する。また、HOV出入口案内部106は、第二のリンク453にHOVレーン属性の情報が補完されていない場合には、当該リンクをHOVレーンの出口として案内するが、第二のリンク453にHOVレーン属性の情報が補完されているため、当該リンクをHOVレーンの出口として案内することを抑制する。その結果、「前方にHOV出口があります」等の音声案内等も抑制される。なお、基本制御部101は、画面上に表示される標識460、461等については、補完された属性情報に基づくものであることが識別できるよう、他の標識と異ならせて表示するようにしてもよい。
【0062】
以上、本発明の第一の実施形態について説明した。本発明の第一の実施形態によると、ナビゲーション装置100は、所定の条件を満たすことにより通行可能となる車線の出入口において適切に案内できる。より具体的には、ユーザにHOVレーンの入口が近づくと、当該入口において適切に案内することができる。
【0063】
本発明は、上記の実施形態に制限されない。上記の実施形態は、本発明の技術的思想の範囲内で様々な変形が可能である。例えば、上記の実施形態では、ナビゲーション装置100が単体で動作するが、これに限られず、無線通信等によるネットワーク30等を介して他の装置から補完したHOVレーン属性の情報を受け取るようにしてもよい。このような第二の実施形態について、図8〜図11を用いて説明する。
【0064】
第二の実施形態は、基本的に第一の実施形態と同様の構成を備えるものであるが、一部相違する。当該相違を中心に、以下説明する。
【0065】
図8に示すように、第二の実施形態においては、ナビゲーション装置100は、携帯電話網やPHS網等を介した無線通信網であるネットワーク30上の他の装置と通信を行う通信装置12を備える。また、ネットワーク30には、ナビゲーションサーバー500が、当該ネットワーク30を介して他の装置と通信可能に接続される。
【0066】
図9は、ナビゲーションサーバー500の構成の概要を示す図である。ナビゲーションサーバー500は、ナビゲーション装置100が備えるリンクテーブル200とほぼ同様の情報を有するリンクテーブル511を記憶する記憶部510と、ナビゲーション装置100から受け付けた現在地を特定する情報と走行速度に応じて補完する地図情報を生成する地図情報補完部521と、地図情報をナビゲーション装置100へ送信する地図情報配信部522と、を備える制御部520と、ネットワーク30を介して他の装置と通信を行う送受信部530と、を有する。
【0067】
地図情報補完部521は、ナビゲーション装置100から現在地を特定する情報と走行速度とに関する情報を受け付けて、所定の条件を満たす場合には、HOVレーン属性の情報が欠損しているリンクについてHOVレーン属性の情報を補完するか否かを決定する。
【0068】
地図情報配信部522は、ナビゲーション装置100へ、表示する範囲の地図情報および経路を誘導する情報を送信する。その際、地図情報配信部522は、HOVレーンの属性情報を補完する場合には、補完して地図情報および経路を誘導する情報を送信する。補完しない場合には、そのまま地図情報および経路を誘導する情報を送信する。
【0069】
図10は、ナビゲーションサーバー500のハードウェア構成例を示す図である。ナビゲーションサーバー500は、入力装置551と、出力装置552と、通信装置553と、演算装置554と、主記憶装置555と、外部記憶装置556と、を有する。それぞれの装置は、バス557により接続されている。なお、入力装置551と、出力装置552とは、必須の構成ではなく、必要に応じて設けられるものであってよい。
【0070】
入力装置551は、キーボードやマウス、あるいはタッチペン、その他ポインティングデバイスなどの入力を受け付ける装置である。出力装置552は、ディスプレイなどの表示を行う装置である。通信装置553は、ネットワーク30などのネットワークを介して他の装置と通信を行う装置である。ナビゲーションサーバー500の通信装置553は、ネットワーク30を通じて、ナビゲーション装置100の通信装置12等と通信を行うことができる。演算装置554は、例えばCPU(Central Processing Unit)などの演算装置である。主記憶装置555は、例えばRAM(Random Access Memory)などのメモリ装置である。外部記憶装置556は、例えばハードディスク装置やSSD(Solid State Drive)などの不揮発性記憶装置である。
【0071】
なお、主記憶装置555に展開される命令コードは、外部記憶装置556に記憶されたものでもよく、また、通信装置553を介して、ネットワーク30上の図示しない他の装置あるいはインターネット等のネットワーク上の装置から取得されたものでもよい。主記憶装置555は、演算装置554が実行する命令コードの展開を行う領域を有する。外部記憶装置556は、いわゆる通常の記憶装置であり、ナビゲーションサーバー500を動作させるソフトウェアや、当該ソフトウェアが必要とするデータの初期値、その他のデータなどを予め記録している。
【0072】
上記したナビゲーションサーバー500の制御部520の地図情報補完部521、地図情報配信部522は、演算装置554が所定のプログラムを読み込み実行することにより構築される。そのため、主記憶装置555には、各機能部の処理を実現するためのプログラムが記憶されている。
【0073】
なお、上記したナビゲーションサーバー500の構成要素は、構成の理解を容易にするために、主な処理内容に応じて分類したものである。そのため、構成要素の分類の仕方やその名称によって、本願発明が制限されることはない。ナビゲーションサーバー500の構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、1つの構成要素がさらに多くの処理を実行するように分類することもできる。
【0074】
また、ナビゲーションサーバー500の制御部520は、ハードウェア(ASIC、GPUなど)により構築されてもよい。また、各機能部の処理が一つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
【0075】
図11は、このような第二の実施形態におけるナビゲーションサーバー500が実施するHOV補完処理についてのフローチャートである。HOV補完処理は、ナビゲーションサーバー500が起動され、所定の開始処理が実行されると開始される。なお、第二の実施形態におけるHOV補完処理のステップS001〜ステップS009までの処理については、第一の実施形態におけるHOV補完処理と基本的に同様である。そのため、以下の説明においては、ステップS001〜ステップS009の処理については、説明を省略する。
【0076】
まず、地図情報補完部521は、現在地を特定する情報と走行速度を特定する情報とを受信する(ステップS101)。当該情報は、ナビゲーション装置100からネットワーク30を介して送信された情報である。
【0077】
そして、地図情報補完部521は、第一の実施形態におけるHOV補完処理のステップS001〜ステップS009と同様に、ステップS001〜ステップS009の処理を実施する。
【0078】
そして、ステップS009の判定において、HOV属性が同一ではない場合(ステップS009にて「No」の場合)には、地図情報配信部522は、経路誘導情報を生成してナビゲーション装置100に送信し、他に欠損箇所が無ければステップS101へ制御を戻す(ステップS111)。
【0079】
地図情報補完部521は、HOV属性が同一である場合(ステップS009にて「Yes」の場合)には、欠損箇所を構成する道路のHOV属性を補完する。そして、地図情報配信部522は、経路誘導情報を生成してナビゲーション装置100へ送信する(ステップS110)。そして、地図情報配信部522は、他に欠損箇所が無ければステップS101へ制御を戻す。具体的には、地図情報補完部521は、対象の欠損箇所を構成する一つまたは複数のリンクのHOV属性228に、欠損箇所の前に接続される道路を構成するリンクのHOV属性228の情報と同一の情報を格納する。そして、地図情報補完部521は、補完有無234に補完があったことを特定する情報を格納する。
【0080】
以上が、第二の実施形態に係るHOV補完処理の処理フローである。HOV補完処理によれば、HOV属性の情報を有しない道路の部分について、当該部分が所定の距離未満である場合には、その直前の道路のHOV属性を用いてHOV属性情報を補完することができる。または、HOV属性の情報を有しない道路の部分が所定の距離以上であっても、当該部分へ到達するまでに所定の時間的余裕があり、当該部分を通過するのにかかる時間が短い場合には、その直前の道路のHOV属性を用いてHOV属性情報を補完することができる。なお、当該補完においては、欠損箇所の前に接続される道路を構成するリンクのHOV属性228と、欠損箇所の後に接続される道路を構成するリンクのHOV属性228とが、互いに同一のHOV属性を有する場合に補完を行う。
【0081】
以上が、第二の実施形態に係るナビゲーションシステム1000である。ナビゲーションシステム1000によれば、所定の条件を満たすことにより通行可能となる車線の出入口において適切に案内できる。また、ナビゲーション装置100の演算負荷を減らすことができる。また、ナビゲーションサーバー500が有する地図情報の適切なアップデートにより均質かつ高精度な経路案内を簡単な仕組みで行うことができる。
【0082】
以上、本発明について、第一の実施形態および第二の実施形態を中心に説明した。なお、上記の第一の実施形態および第二の実施形態では、本発明にナビゲーション装置を用いた例について説明したが、本発明はナビゲーション装置に限らず、移動体の経路案内を行う装置全般、例えば携帯電話、PDA(Personal Digital Assistant)、モバイルPC、音楽プレーヤー等の情報端末全般に適用することができる。
【符号の説明】
【0083】
1・・・演算処理部、2・・・ディスプレイ、3・・・記憶装置、4・・・音声出入力装置、5・・・入力装置、6・・・ROM装置、7・・・車速センサ、8・・・ジャイロセンサ、9・・・GPS受信装置、10・・・FM多重放送受信装置、11・・・ビーコン受信装置、12・・・通信装置、21・・・CPU、22・・・RAM、23・・・ROM、24・・・I/F、25・・・バス、30・・・ネットワーク、41・・・マイクロフォン、42・・・スピーカ、51・・・タッチパネル、52・・・ダイヤルスイッチ、100・・・ナビゲーション装置、101・・・基本制御部、102・・・入力受付部、103・・・出力処理部、104・・・HOV欠損判定部、105・・・HOV情報補完部、106・・・HOV出入口案内部、200、511・・・リンクテーブル、500・・・ナビゲーションサーバー、510・・・記憶部、520・・・制御部、521・・・地図情報補完部、522・・・地図情報配信部、530・・・送受信部
【技術分野】
【0001】
本発明は、情報端末の技術に関するものである。
【背景技術】
【0002】
従来、ナビゲーション装置では、HOV(High−Occupancy Vehicles)レーン等の特定の条件を満たす車両のみが走行可能な車線に対応する経路誘導の技術が用いられている。当該技術では、HOVレーンを走行していない状態においてHOVレーンへの進入口があるとHOVレーン入口の案内を行い、HOVレーンを走行している状態においてHOVレーンの退出口があるとHOVレーン出口の案内を行う。特許文献1には、このようなナビゲーション装置についての技術が記載されている。なお、HOVレーンは、カープールレーンとも呼ばれる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−145282号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなナビゲーション装置では、実際にはHOVレーンが途切れずに継続しているにもかかわらず、地図情報からはHOVレーンの情報が欠落している区間においては、HOVレーンの出入口を案内してしまうこととなるが、実際にはHOVレーン出入り可能な出入口は限定されているため、不都合が起こる場合がある。
【0005】
本発明の目的は、ユーザに対して、所定の条件を満たすことにより通行可能となる車線の出入口において適切に案内できる技術を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決すべく、本発明に係る情報端末は、所定の条件を満たすことにより通行可能となる車線(以下条件付き車線という)の設置状況を含む車線情報を記憶する記憶手段と、所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定手段と、前記車線情報欠損判定手段により欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完手段と、を備えることを特徴とする。
【0007】
また、本発明に係るプログラムは、コンピュータに、運転を支援する手順を実行させるプログラムであって、前記コンピュータを、制御手段と、所定の条件を満たすことにより通行可能となる車線の設置状況を含む車線情報を記憶する記憶手段として機能させ、前記制御手段に対して、所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定手順と、前記車線情報欠損判定手順により欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完手順と、を実行させることを特徴とする。
【0008】
また、本発明に係る運転支援方法は、情報端末による運転支援方法であって、前記情報端末は、所定の条件を満たすことにより通行可能となる車線の設置状況を含む車線情報を記憶する記憶手段を備え、所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定ステップと、前記車線情報欠損判定ステップにより欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完ステップと、を実施することを特徴とする。
【発明の効果】
【0009】
本願発明によれば、所定の条件を満たすことにより通行可能となる車線の出入口で適切に案内できるナビゲーション技術を提供することが可能となる。
【図面の簡単な説明】
【0010】
【図1】第一の実施形態に係るナビゲーション装置の概略構成図である。
【図2】リンクテーブルの構成を示す図である。
【図3】演算処理部の機能構成図である。
【図4】HOV補完処理のフロー図である。
【図5】HOVレーン情報が欠損している道路の例を示す図である。
【図6】HOVレーン情報の補完の例を示す図である。
【図7】HOVレーン情報の補完の効果の例を示す図である。
【図8】第二の実施形態に係るナビゲーションシステムの概略構成図である。
【図9】ナビゲーションサーバーの概略構成図である。
【図10】ナビゲーションサーバーのハードウェア構成例を示す図である。
【図11】第二の実施形態に係るHOV補完処理のフロー図である。
【発明を実施するための形態】
【0011】
以下に、本発明の第一の実施形態を適用したナビゲーション装置について、図面を参照して説明する。
【0012】
図1に、ナビゲーション装置100の全体構成図を示す。ナビゲーション装置100は、地図情報を表示して、ナビゲーション装置100の現在地を示す地点と、設定された目的地までの経路を誘導する情報とを示すことが可能ないわゆるナビゲーション装置である。
【0013】
ナビゲーション装置100は、演算処理部1と、ディスプレイ2と、記憶装置3と、音声入出力装置4(音声入力装置としてマイクロフォン41、音声出力装置としてスピーカ42を備える)と、入力装置5と、ROM装置6と、車速センサ7と、ジャイロセンサ8と、GPS(Global Positioning System)受信装置9と、FM多重放送受信装置10と、ビーコン受信装置11と、を備えている。
【0014】
演算処理部1は、様々な処理を行う中心的ユニットである。例えば各種センサ7,8やGPS受信装置9、FM多重放送受信装置10等から出力される情報に基づいて現在地を算出する。また、得られた現在地情報に基づいて、表示に必要な地図データを記憶装置3あるいはROM装置6から読み出す。
【0015】
また、演算処理部1は、読み出した地図データをグラフィックス展開し、そこに現在地を示すマークを重ねてディスプレイ2へ表示する。また、記憶装置3あるいはROM装置6に記憶されている地図データ等を用いて、ユーザから指示された出発地又は現在地と、目的地(または、経由地や立ち寄り地)とを結ぶ最適な経路(推奨経路)を探索する。また、スピーカ42やディスプレイ2を用いてユーザを誘導する。
【0016】
また、演算処理部1は、経路誘導を行う際に、HOV(High−OccupancyVehicles)レーンへの出入り口の走行を案内することができる。なお、HOVレーンは、乗車人数が規定の乗車人数(例えば運転者を含めて2人)以上である車両や、特定の基準(低燃費、あるいは低公害)を満たす車両のみが走行可能として規定された車線のことである。
【0017】
ナビゲーション装置100の演算処理部1は、各デバイス間をバス25で接続した構成である。演算処理部1は、数値演算及び各デバイスを制御するといった様々な処理を実行するCPU(Central Processing Unit)21と、記憶装置3から読み出した地図データ、演算データなどを格納するRAM(Random Access Memory)22と、プログラムやデータを格納するROM(Read Only Memory)23と、各種ハードウェアを演算処理部1と接続するためのI/F(インターフェイス)24と、を有する。
【0018】
ディスプレイ2は、演算処理部1等で生成されたグラフィックス情報を表示するユニットである。ディスプレイ2は、液晶ディスプレイ、有機ELディスプレイなどで構成される。
【0019】
記憶装置3は、HDD(Hard Disk Drive)や不揮発性メモリカードといった、少なくとも読み書きが可能な記憶媒体で構成される。
【0020】
この記憶媒体には、通常の経路探索装置に必要な地図データ(地図上の道路を構成するリンクのリンクデータを含む)であるリンクテーブル200が記憶されている。
【0021】
図2は、リンクテーブル200の構成を示す図である。リンクテーブル200は、地図上の区画された領域であるメッシュの識別コード(メッシュID)201ごとに、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ202を含んでいる。
【0022】
リンクデータ202は、リンクの識別子であるリンクID211ごとに、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報222、リンクを含む道路の種別を示す道路種別223、リンクの長さを示すリンク長224、予め記憶されたリンク旅行時間225、開始接続リンクおよび終了接続リンク226、リンクを含む道路の制限速度を示す制限速度227、リンクごとのHOVレーンの設置状況に関する属性を特定するHOV属性228などを含んでいる。なお、開始接続リンクおよび終了接続リンク226は、当該リンクの開始ノードに接続するリンクである開始接続リンクと、当該リンクの終了ノードに接続するリンクである終了接続リンクと、を特定する情報である。
【0023】
HOV属性228は、当該リンクがHOVレーンのみから構成されている道路である場合には、「専用」の属性231を備え、当該リンクがHOVレーンを備えない道路である場合には、「無」の属性233を備える。また、当該リンクがHOVレーンと通常レーンとを併せて有するものである場合には、「共用」の属性232を備える。また、「専用」の属性231と、「共用」の属性232と、「無」の属性233とが、後述するHOV補完処理により補完された属性の情報であるか否かを特定する補完有無234を備える。すなわち、HOV属性228には、HOVレーンの設置状況を特定する情報が格納されるといえる。なお、HOV属性228の情報は、「専用」の属性231と、「共用」の属性232と、「無」の属性233のいずれも格納されておらず、かつ、補完有無234に補完有の情報が格納されていない場合には、当該リンクについてHOV属性が欠落している、といえる。
【0024】
なお、ここでは、リンクを構成する2つのノードについて開始ノードと終了ノードとを区別することで、同じ道路の上り方向と下り方向とを、それぞれ別のリンクとして管理するようにしている。
【0025】
図1に戻って説明する。音声入出力装置4は、音声入力装置としてマイクロフォン41と、音声出力装置としてスピーカ42と、を備える。マイクロフォン41は、ユーザやその他の搭乗者が発した声などのナビゲーション装置100の外部の音声を取得する。
【0026】
スピーカ42は、演算処理部1で生成されたユーザへのメッセージを音声として出力する。マイクロフォン41とスピーカ42は、車両の所定の部位に、別個に配されている。ただし、一体の筐体に収納されていても良い。ナビゲーション装置100は、マイクロフォン41及びスピーカ42を、それぞれ複数備えることができる。
【0027】
入力装置5は、ユーザからの指示をユーザによる操作を介して受け付ける装置である。入力装置5は、タッチパネル51と、ダイヤルスイッチ52と、その他のハードスイッチ(図示しない)であるスクロールキー、縮尺変更キーなどで構成される。また、入力装置5には、ナビゲーション装置100に対して遠隔で操作指示を行うことができるリモートコントローラが含まれる。リモートコントローラは、ダイヤルスイッチやスクロールキー、縮尺変更キーなどを備え、各キーやスイッチが操作された情報をナビゲーション装置100に送出することができる。
【0028】
タッチパネル51は、ディスプレイ2の表示面側に搭載され、表示画面を透視可能である。タッチパネル51は、ディスプレイ2に表示された画像のXY座標と対応したタッチ位置を特定し、タッチ位置を座標に変換して出力する。タッチパネル51は、感圧式または静電式の入力検出素子などにより構成される。
【0029】
ダイヤルスイッチ52は、時計回り及び反時計回りに回転可能に構成され、所定の角度の回転ごとにパルス信号を発生し、演算処理部1に出力する。演算処理部1では、パルス信号の数から、回転角度を求める。
【0030】
ROM装置6は、CD-ROMやDVD-ROM等のROM(Read Only Memory)や、IC(Integrated Circuit)カードといった、少なくとも読み取りが可能な記憶媒体で構成されている。この記憶媒体には、例えば、動画データや、音声データなどが記憶されている。
【0031】
車速センサ7,ジャイロセンサ8およびGPS受信装置9は、ナビゲーション装置100で現在地(自車位置)を検出するために使用されるものである。車速センサ7は、車速を算出するのに用いる値を出力するセンサである。ジャイロセンサ8は、光ファイバジャイロや振動ジャイロ等で構成され、移動体の回転による角速度を検出するものである。GPS受信装置9は、GPS衛星からの信号を受信し移動体とGPS衛星間の距離と距離の変化率とを3個以上の衛星に対して測定することで移動体の現在地、進行速度および進行方位を測定するものである。
【0032】
FM多重放送受信装置10は、FM放送局から送られてくるFM多重放送信号を受信する。FM多重放送には、VICS(Vehicle Information Communication System:登録商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などやFM多重一般情報としてラジオ局が提供する文字情報などがある。
【0033】
ビーコン受信装置11は、VICS情報などの概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報や緊急警報などを受信する。例えば、光により通信する光ビーコン、電波により通信する電波ビーコン等の受信装置である。
【0034】
図3は、演算処理部1の機能ブロック図である。図示するように、演算処理部1は、基本制御部101と、入力受付部102と、出力処理部103と、HOV欠損判定部104と、HOV情報補完部105と、HOV出入口案内部106と、を有する。
【0035】
基本制御部101は、様々な処理を行う中心的な機能部であり、処理内容に応じて、他の処理部を制御する。また、各種センサ、GPS受信装置9等の情報を取得し、マップマッチング処理等を行って現在地を特定する。また、随時、走行した日付および時刻と、位置と、を対応付けて、リンクごとに走行履歴を記憶装置3に記憶する。さらに、各処理部からの要求に応じて、現在時刻を出力する。
【0036】
また、基本制御部101は、ユーザから指示された出発地又は現在地と、目的地とを結ぶ最適な経路(推奨経路)を探索する。当該経路探索においては、ダイクストラ法等の経路探索ロジックを用いて、道路の所定の区間(リンク)に対して予め設定されたリンクコストに基づいて経路を探索する。なお、当該処理においては、HOVレーンを利用する経路を考慮せずに、リンクコストが最小となる経路を探索する。
【0037】
また、基本制御部101は、車両の現在地が推奨経路から逸脱しないよう、スピーカ42やディスプレイ2を用いてユーザの運転操作を誘導する。また、基本制御部101は、HOV出入口案内部106に対して、HOVレーン入口への誘導や、通常レーンへの出口の誘導を行うよう指示する。
【0038】
入力受付部102は、入力装置5またはマイクロフォン41を介して入力されたユーザからの指示を受け付け、その要求内容に対応する処理を実行するように演算処理部1の各部を制御する。例えば、ユーザが推奨経路の探索を要求したときは、目的地を設定するため、地図をディスプレイ2に表示する処理を出力処理部103に要求する。
【0039】
出力処理部103は、例えばポリゴン情報等の表示させる画面情報を受け取り、ディスプレイ2に描画するための信号に変換してディスプレイ2に対して描画する指示を行う。
【0040】
HOV欠損判定部104は、所定区間の道路を構成するリンクについて、道路情報からHOV情報が欠損している道路であるのか、それとも実際に当該リンクに相当する道路はHOV情報の欠損は無い道路であるのかを判定する。
【0041】
HOV情報補完部105は、所定区間の道路を構成するリンクについて、道路情報からHOV情報が欠損している道路である場合に、当該区間の道路のHOV情報を、前後の区間の道路等から推測し、HOV情報を補完する。なお、HOV情報補完部105によりHOV情報が補完されたリンクは、補完されたHOV情報を有することを特定可能なように、補完の有無を特定する情報が対応付けられて記憶される。
【0042】
HOV出入口案内部106は、HOVレーンの出入り口におけるHOVレーンと通常レーンとの間の出入りに関して、ユーザに対して案内を行う。具体的には、HOV出入口案内部106は、HOVレーンの出入り口(一般的には、出口、入口は共用される)において、HOVレーンに進入すべき旨、HOVレーンから退出すべき旨、あるいは走行レーンを維持すべき旨等をユーザに対して音声・画像等を用いて案内する。またその案内においては、HOV出入口案内部106は、HOVレーンではないリンクあるいはHOVレーン情報が欠落しているリンクを出入口であるとして案内する。また、HOV出入口案内部106は、HOVレーン情報が補完されたリンクについて、当該リンクに基づくHOVレーンの走行についての案内を抑止する。
【0043】
すなわち、HOV出入口案内部106は、HOVレーン情報が設定されていないリンクについて、出入口の案内を行う対象として案内を行い、HOVレーン情報が設定されているリンクあるいはHOVレーン情報が補完されたリンクについては、出入口の案内を行う対象として案内を行う。
【0044】
上記した演算処理部1の各機能部、すなわち基本制御部101、入力受付部102、出力処理部103、HOV欠損判定部104、HOV情報補完部105、HOV出入口案内部106は、CPU21が所定のプログラムを読み込み実行することにより構築される。そのため、RAM22には、各機能部の処理を実現するためのプログラムが記憶されている。
【0045】
なお、上記した各構成要素は、ナビゲーション装置100の構成を、理解を容易にするために、主な処理内容に応じて分類したものである。そのため、構成要素の分類の仕方やその名称によって、本願発明が制限されることはない。ナビゲーション装置100の構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、1つの構成要素がさらに多くの処理を実行するように分類することもできる。
【0046】
また、各機能部は、ハードウェア(ASIC、GPUなど)により構築されてもよい。また、各機能部の処理が一つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
【0047】
[動作の説明]次に、ナビゲーション装置100が実施するHOV補完処理の動作について説明する。図4は、ナビゲーション装置100が実施するHOV補完処理を示すフロー図である。このフローは、ナビゲーション装置100に電源が投入されて、ナビゲーション装置100が起動すると開始される。
【0048】
まず、HOV欠損判定部104は、現在地から所定範囲内(例えば、1km以内)にあるHOV属性28の欠損箇所について、欠損距離を特定する(ステップS001)。具体的には、HOV欠損判定部104は、基本制御部101に対して、現在地を特定する位置情報を要求して取得し、所定範囲内に含まれるリンクを抽出する。抽出した各リンクについて、HOV属性228の情報が、「専用」の属性231、「共用」の属性232、「無」の属性233のいずれでもない場合には、当該リンクを欠損箇所であるとして特定し、当該欠損箇所を構成するリンクのリンク長224を欠損距離として特定する。なお、HOV欠損判定部104は、HOV属性228の情報が、「専用」の属性231、「共用」の属性232、「無」の属性233のいずれでもないリンクが連続して接続されている場合には、連続して接続された複数のリンクの集合を欠損箇所として特定し、欠損箇所を構成するそれぞれのリンク長を合算して欠損距離として特定する。
【0049】
次に、HOV情報補完部105は、欠損距離が所定距離(例えば、50メートル)以下であるか否かを判定する(ステップS002)。具体的には、HOV情報補完部105は、ステップS001において特定した欠損箇所について、欠損距離が所定距離(例えば、50メートル)以下であるか否かを判定する。そして、HOV情報補完部105は、当該ステップ以降のステップS003〜ステップS010の処理を、欠損箇所ごとに実施する。
【0050】
欠損距離が所定距離以下ではない場合(ステップS002にて「No」の場合)には、HOV情報補完部105は、走行速度を特定する(ステップS003)。具体的には、HOV情報補完部105は、基本制御部101に対して、処理時点での走行速度を問い合わせる。基本制御部101は、ECU(Engine Control Unit)等から出力される速度の情報を取得して、HOV情報補完部105へ受け渡す。
【0051】
HOV情報補完部105は、対象としているHOV欠損箇所までの到達時間を特定する(ステップS004)。具体的には、HOV情報補完部105は、現在地からHOV欠損箇所の開始ノードまでの距離を特定し、走行速度で除算して到達時間を特定する。
【0052】
HOV情報補完部105は、到達時間が所定時間(例えば、20秒)以上であるか否かを判定する(S005)。到達時間が所定時間よりも短い場合には、HOV情報補完部105は、対象の欠損箇所についてのHOV属性情報の補完は行わず、他に欠損箇所が無ければステップS001へ制御を戻す。
【0053】
到達時間が所定時間以上である場合(ステップS005にて「Yes」)には、HOV情報補完部105は、欠損箇所の通過時間を特定する(ステップS006)。具体的には、HOV情報補完部105は、対象の欠損箇所の欠損距離を、走行速度で除算して通過にかかる時間を特定する。
【0054】
そして、HOV情報補完部105は、通過時間が所定時間(例えば、6秒)未満であるか否かを判定する(ステップS007)。通過時間が所定時間未満でない場合には、HOV情報補完部105は、対象の欠損箇所についてのHOV属性情報の補完は行わず、他に欠損箇所が無ければステップS001へ制御を戻す。
【0055】
通過時間が所定時間未満の場合(ステップS007にて「Yes」)には、HOV情報補完部105は、対象の欠損箇所の前後に接続される道路のHOV属性を特定する(ステップS008)。具体的には、HOV情報補完部105は、対象の欠損箇所を構成するリンクのうち、開始接続リンクにHOV情報の欠損がないリンクを欠損箇所の前に接続される道路とし、終了接続リンクにHOV情報の欠損がないリンクを欠損箇所の後に接続される道路とする。そして、HOV情報補完部105は、欠損箇所の前に接続される道路を構成するリンクのHOV属性228と、欠損箇所の後に接続される道路を構成するリンクのHOV属性228と、をリンクテーブル200から読み出す。なお、一般に、欠損箇所の前に接続される道路は、HOVの終端を構成し、欠損箇所の後に接続される道路は、HOVの開始端を構成する。
【0056】
HOV情報補完部105は、欠損箇所の前に接続される道路を構成するリンクのHOV属性228と、欠損箇所の後に接続される道路を構成するリンクのHOV属性228と、を比較し、同一であるか否かを判定する(ステップS009)。具体的には、HOV情報補完部105は、欠損箇所の前に接続される道路を構成するリンクのHOV属性228と、欠損箇所の後に接続される道路を構成するリンクのHOV属性228とが、互いに「専用」の属性231である場合、互いに「共用」の属性232である場合、互いに「無」の属性233である場合には、HOV属性が同一であると判定する。HOV属性が同一ではない場合には、HOV情報補完部105は、対象の欠損箇所についてのHOV属性情報の補完は行わず、他に欠損箇所が無ければステップS001へ制御を戻す。
【0057】
HOV情報補完部105は、HOV属性が同一である場合(ステップS009にて「Yes」の場合)には、欠損箇所を構成する道路のHOV属性を補完する(ステップS010)。そして、HOV情報補完部105は、他に欠損箇所が無ければステップS001へ制御を戻す。具体的には、HOV情報補完部105は、対象の欠損箇所を構成する一つまたは複数のリンクのHOV属性228に、欠損箇所の前に接続される道路を構成するリンクのHOV属性228の情報と同一の情報を格納する。そして、HOV情報補完部105は、補完有無234に補完があったことを特定する情報を格納する。
【0058】
以上が、HOV補完処理の処理フローである。HOV補完処理によれば、HOV属性の情報を有しない道路の部分について、当該部分が所定の距離未満である場合には、その直前の道路のHOV属性を用いてHOV属性情報を補完することができる。または、HOV属性の情報を有しない道路の部分が所定の距離以上であっても、当該部分へ到達するまでに所定の時間的余裕があり、当該部分を通過するのにかかる時間が短い場合には、その直前の道路のHOV属性を用いてHOV属性情報を補完することができる。なお、当該補完においては、欠損箇所の前に接続される道路を構成するリンクのHOV属性228と、欠損箇所の後に接続される道路を構成するリンクのHOV属性228とが、互いに同一のHOV属性を有する場合に補完を行う。
【0059】
図5は、HOVレーン情報が欠損している道路の例を示す図である。当該例では、自車450はHOVレーン451を走行している状態である。また、当該例の道路は、HOVレーン451には、HOVレーンでない通常の走行車線452が併設されるいわゆる「共用」の属性を有する直近リンク456と、直近リンク456の終了端454において直近リンク456と接続される第二のリンク453と、第二のリンク453の終了端455において第二のリンク453に接続される第三のリンク457と、により構成される。そして、第二のリンク453にはHOVレーン属性の情報が欠損しており、第三のリンク457は、直近リンク456と同様のHOVレーン属性を有しているものとする。なお、第二のリンク453は、リンク長が50メートルを超えている(例えば、100メートル)ものとする。
【0060】
図6は、HOVレーン情報の補完処理の例を示す図である。当該例では、図5に示した道路において、第二のリンク453のHOVレーン属性が補完されている。すなわち、第二のリンク453は、直近リンク456と同様のHOVレーン属性を有する。上述したように、走行速度および第二のリンク453までの距離に応じて当該補完がなされるか否かの結果が異なるが、図6は、補完がなされる状態を示している。
【0061】
図7は、HOVレーン情報の補完の効果の例を示す図である。当該例では、図6に示した補完の処理の例により、第二のリンク453のHOVレーン属性の情報が補完された場合の出力例を示している。すなわち、第二のリンク453のHOVレーン属性が補完された結果、HOV出入口案内部106により、第二のリンク453についても直近リンク456と同様にHOVレーンであると判定され、HOV出入口案内部106は、HOVレーンを示す標識460、461等を画面上に表示する。また、HOV出入口案内部106は、第二のリンク453にHOVレーン属性の情報が補完されていない場合には、当該リンクをHOVレーンの出口として案内するが、第二のリンク453にHOVレーン属性の情報が補完されているため、当該リンクをHOVレーンの出口として案内することを抑制する。その結果、「前方にHOV出口があります」等の音声案内等も抑制される。なお、基本制御部101は、画面上に表示される標識460、461等については、補完された属性情報に基づくものであることが識別できるよう、他の標識と異ならせて表示するようにしてもよい。
【0062】
以上、本発明の第一の実施形態について説明した。本発明の第一の実施形態によると、ナビゲーション装置100は、所定の条件を満たすことにより通行可能となる車線の出入口において適切に案内できる。より具体的には、ユーザにHOVレーンの入口が近づくと、当該入口において適切に案内することができる。
【0063】
本発明は、上記の実施形態に制限されない。上記の実施形態は、本発明の技術的思想の範囲内で様々な変形が可能である。例えば、上記の実施形態では、ナビゲーション装置100が単体で動作するが、これに限られず、無線通信等によるネットワーク30等を介して他の装置から補完したHOVレーン属性の情報を受け取るようにしてもよい。このような第二の実施形態について、図8〜図11を用いて説明する。
【0064】
第二の実施形態は、基本的に第一の実施形態と同様の構成を備えるものであるが、一部相違する。当該相違を中心に、以下説明する。
【0065】
図8に示すように、第二の実施形態においては、ナビゲーション装置100は、携帯電話網やPHS網等を介した無線通信網であるネットワーク30上の他の装置と通信を行う通信装置12を備える。また、ネットワーク30には、ナビゲーションサーバー500が、当該ネットワーク30を介して他の装置と通信可能に接続される。
【0066】
図9は、ナビゲーションサーバー500の構成の概要を示す図である。ナビゲーションサーバー500は、ナビゲーション装置100が備えるリンクテーブル200とほぼ同様の情報を有するリンクテーブル511を記憶する記憶部510と、ナビゲーション装置100から受け付けた現在地を特定する情報と走行速度に応じて補完する地図情報を生成する地図情報補完部521と、地図情報をナビゲーション装置100へ送信する地図情報配信部522と、を備える制御部520と、ネットワーク30を介して他の装置と通信を行う送受信部530と、を有する。
【0067】
地図情報補完部521は、ナビゲーション装置100から現在地を特定する情報と走行速度とに関する情報を受け付けて、所定の条件を満たす場合には、HOVレーン属性の情報が欠損しているリンクについてHOVレーン属性の情報を補完するか否かを決定する。
【0068】
地図情報配信部522は、ナビゲーション装置100へ、表示する範囲の地図情報および経路を誘導する情報を送信する。その際、地図情報配信部522は、HOVレーンの属性情報を補完する場合には、補完して地図情報および経路を誘導する情報を送信する。補完しない場合には、そのまま地図情報および経路を誘導する情報を送信する。
【0069】
図10は、ナビゲーションサーバー500のハードウェア構成例を示す図である。ナビゲーションサーバー500は、入力装置551と、出力装置552と、通信装置553と、演算装置554と、主記憶装置555と、外部記憶装置556と、を有する。それぞれの装置は、バス557により接続されている。なお、入力装置551と、出力装置552とは、必須の構成ではなく、必要に応じて設けられるものであってよい。
【0070】
入力装置551は、キーボードやマウス、あるいはタッチペン、その他ポインティングデバイスなどの入力を受け付ける装置である。出力装置552は、ディスプレイなどの表示を行う装置である。通信装置553は、ネットワーク30などのネットワークを介して他の装置と通信を行う装置である。ナビゲーションサーバー500の通信装置553は、ネットワーク30を通じて、ナビゲーション装置100の通信装置12等と通信を行うことができる。演算装置554は、例えばCPU(Central Processing Unit)などの演算装置である。主記憶装置555は、例えばRAM(Random Access Memory)などのメモリ装置である。外部記憶装置556は、例えばハードディスク装置やSSD(Solid State Drive)などの不揮発性記憶装置である。
【0071】
なお、主記憶装置555に展開される命令コードは、外部記憶装置556に記憶されたものでもよく、また、通信装置553を介して、ネットワーク30上の図示しない他の装置あるいはインターネット等のネットワーク上の装置から取得されたものでもよい。主記憶装置555は、演算装置554が実行する命令コードの展開を行う領域を有する。外部記憶装置556は、いわゆる通常の記憶装置であり、ナビゲーションサーバー500を動作させるソフトウェアや、当該ソフトウェアが必要とするデータの初期値、その他のデータなどを予め記録している。
【0072】
上記したナビゲーションサーバー500の制御部520の地図情報補完部521、地図情報配信部522は、演算装置554が所定のプログラムを読み込み実行することにより構築される。そのため、主記憶装置555には、各機能部の処理を実現するためのプログラムが記憶されている。
【0073】
なお、上記したナビゲーションサーバー500の構成要素は、構成の理解を容易にするために、主な処理内容に応じて分類したものである。そのため、構成要素の分類の仕方やその名称によって、本願発明が制限されることはない。ナビゲーションサーバー500の構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、1つの構成要素がさらに多くの処理を実行するように分類することもできる。
【0074】
また、ナビゲーションサーバー500の制御部520は、ハードウェア(ASIC、GPUなど)により構築されてもよい。また、各機能部の処理が一つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
【0075】
図11は、このような第二の実施形態におけるナビゲーションサーバー500が実施するHOV補完処理についてのフローチャートである。HOV補完処理は、ナビゲーションサーバー500が起動され、所定の開始処理が実行されると開始される。なお、第二の実施形態におけるHOV補完処理のステップS001〜ステップS009までの処理については、第一の実施形態におけるHOV補完処理と基本的に同様である。そのため、以下の説明においては、ステップS001〜ステップS009の処理については、説明を省略する。
【0076】
まず、地図情報補完部521は、現在地を特定する情報と走行速度を特定する情報とを受信する(ステップS101)。当該情報は、ナビゲーション装置100からネットワーク30を介して送信された情報である。
【0077】
そして、地図情報補完部521は、第一の実施形態におけるHOV補完処理のステップS001〜ステップS009と同様に、ステップS001〜ステップS009の処理を実施する。
【0078】
そして、ステップS009の判定において、HOV属性が同一ではない場合(ステップS009にて「No」の場合)には、地図情報配信部522は、経路誘導情報を生成してナビゲーション装置100に送信し、他に欠損箇所が無ければステップS101へ制御を戻す(ステップS111)。
【0079】
地図情報補完部521は、HOV属性が同一である場合(ステップS009にて「Yes」の場合)には、欠損箇所を構成する道路のHOV属性を補完する。そして、地図情報配信部522は、経路誘導情報を生成してナビゲーション装置100へ送信する(ステップS110)。そして、地図情報配信部522は、他に欠損箇所が無ければステップS101へ制御を戻す。具体的には、地図情報補完部521は、対象の欠損箇所を構成する一つまたは複数のリンクのHOV属性228に、欠損箇所の前に接続される道路を構成するリンクのHOV属性228の情報と同一の情報を格納する。そして、地図情報補完部521は、補完有無234に補完があったことを特定する情報を格納する。
【0080】
以上が、第二の実施形態に係るHOV補完処理の処理フローである。HOV補完処理によれば、HOV属性の情報を有しない道路の部分について、当該部分が所定の距離未満である場合には、その直前の道路のHOV属性を用いてHOV属性情報を補完することができる。または、HOV属性の情報を有しない道路の部分が所定の距離以上であっても、当該部分へ到達するまでに所定の時間的余裕があり、当該部分を通過するのにかかる時間が短い場合には、その直前の道路のHOV属性を用いてHOV属性情報を補完することができる。なお、当該補完においては、欠損箇所の前に接続される道路を構成するリンクのHOV属性228と、欠損箇所の後に接続される道路を構成するリンクのHOV属性228とが、互いに同一のHOV属性を有する場合に補完を行う。
【0081】
以上が、第二の実施形態に係るナビゲーションシステム1000である。ナビゲーションシステム1000によれば、所定の条件を満たすことにより通行可能となる車線の出入口において適切に案内できる。また、ナビゲーション装置100の演算負荷を減らすことができる。また、ナビゲーションサーバー500が有する地図情報の適切なアップデートにより均質かつ高精度な経路案内を簡単な仕組みで行うことができる。
【0082】
以上、本発明について、第一の実施形態および第二の実施形態を中心に説明した。なお、上記の第一の実施形態および第二の実施形態では、本発明にナビゲーション装置を用いた例について説明したが、本発明はナビゲーション装置に限らず、移動体の経路案内を行う装置全般、例えば携帯電話、PDA(Personal Digital Assistant)、モバイルPC、音楽プレーヤー等の情報端末全般に適用することができる。
【符号の説明】
【0083】
1・・・演算処理部、2・・・ディスプレイ、3・・・記憶装置、4・・・音声出入力装置、5・・・入力装置、6・・・ROM装置、7・・・車速センサ、8・・・ジャイロセンサ、9・・・GPS受信装置、10・・・FM多重放送受信装置、11・・・ビーコン受信装置、12・・・通信装置、21・・・CPU、22・・・RAM、23・・・ROM、24・・・I/F、25・・・バス、30・・・ネットワーク、41・・・マイクロフォン、42・・・スピーカ、51・・・タッチパネル、52・・・ダイヤルスイッチ、100・・・ナビゲーション装置、101・・・基本制御部、102・・・入力受付部、103・・・出力処理部、104・・・HOV欠損判定部、105・・・HOV情報補完部、106・・・HOV出入口案内部、200、511・・・リンクテーブル、500・・・ナビゲーションサーバー、510・・・記憶部、520・・・制御部、521・・・地図情報補完部、522・・・地図情報配信部、530・・・送受信部
【特許請求の範囲】
【請求項1】
所定の条件を満たすことにより通行可能となる車線(以下条件付き車線という)の設置状況を含む車線情報を記憶する記憶手段と、
所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定手段と、
前記車線情報欠損判定手段により欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完手段と、
を備えることを特徴とする情報端末。
【請求項2】
請求項1に記載の情報端末であって、
前記車線情報欠損判定手段は、前記所定の道路の区間が、前記条件付き車線についての車線情報を含まない場合に、欠損していると判定する、
ことを特徴とする情報端末。
【請求項3】
請求項1または2に記載の情報端末であって、
前記車線情報補完手段は、欠損している前記所定の道路の区間の長さが、所定距離より短い場合には、当該道路の区間の前記条件付き車線についての車線情報を補完対象とする、
ことを特徴とする情報端末。
【請求項4】
請求項1〜3のいずれか一項に記載の情報端末であって、
前記車線情報補完手段は、欠損している前記所定の道路の区間の長さが、所定距離より短い場合であって、前記欠損している道路の区間の前後の車線情報のうち前記条件付き車線についての情報が一致する場合には、当該道路の区間の前記条件付き車線についての車線情報を補完対象とする、
ことを特徴とする情報端末。
【請求項5】
請求項1〜4のいずれか一項に記載の情報端末であって、
前記車線情報補完手段は、欠損している前記所定の道路の区間の長さが、所定距離より長い場合であって、当該道路の区間を通過するのにかかる通過予測時間が所定時間より短い場合には、当該道路の区間の前記条件付き車線についての車線情報を補完対象とする、
ことを特徴とする情報端末。
【請求項6】
請求項1〜5のいずれか一項に記載の情報端末であって、
前記車線情報補完手段は、欠損している前記所定の道路の区間の長さが、所定距離より長い場合であって、当該道路の区間を通過するのにかかる通過予測時間が所定時間より短く、当該道路の区間へ到達するのにかかる到達予測時間が所定時間より長い場合には、当該道路の区間の前記条件付き車線についての車線情報を補完対象とする、
ことを特徴とする情報端末。
【請求項7】
請求項1〜6のいずれか一項に記載の情報端末であって、
さらに、現在地を特定する現在地特定手段を備え、
前記車線情報補完手段は、前記補完対象の道路の区間について、当該区間に隣接する所定の道路の区間のうち、現在地に近い区間の条件付き車線についての車線情報を用いて補完する、
ことを特徴とする情報端末。
【請求項8】
請求項1〜7のいずれか一項に記載の情報端末であって、
さらに、前記車線情報補完手段により補完された前記道路の区間の前記車線情報を含む車線情報を用いて、道路の情報を表示する表示手段、
を備えることを特徴とする情報端末。
【請求項9】
コンピュータに、運転を支援する手順を実行させるプログラムであって、
前記コンピュータを、制御手段と、所定の条件を満たすことにより通行可能となる車線の設置状況を含む車線情報を記憶する記憶手段として機能させ、
前記制御手段に対して、
所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定手順と、
前記車線情報欠損判定手順により欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完手順と、
を実行させることを特徴とするプログラム。
【請求項10】
情報端末による運転支援方法であって、
前記情報端末は、
所定の条件を満たすことにより通行可能となる車線の設置状況を含む車線情報を記憶する記憶手段を備え、
所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定ステップと、
前記車線情報欠損判定ステップにより欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完ステップと、
を実施することを特徴とする運転支援方法。
【請求項1】
所定の条件を満たすことにより通行可能となる車線(以下条件付き車線という)の設置状況を含む車線情報を記憶する記憶手段と、
所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定手段と、
前記車線情報欠損判定手段により欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完手段と、
を備えることを特徴とする情報端末。
【請求項2】
請求項1に記載の情報端末であって、
前記車線情報欠損判定手段は、前記所定の道路の区間が、前記条件付き車線についての車線情報を含まない場合に、欠損していると判定する、
ことを特徴とする情報端末。
【請求項3】
請求項1または2に記載の情報端末であって、
前記車線情報補完手段は、欠損している前記所定の道路の区間の長さが、所定距離より短い場合には、当該道路の区間の前記条件付き車線についての車線情報を補完対象とする、
ことを特徴とする情報端末。
【請求項4】
請求項1〜3のいずれか一項に記載の情報端末であって、
前記車線情報補完手段は、欠損している前記所定の道路の区間の長さが、所定距離より短い場合であって、前記欠損している道路の区間の前後の車線情報のうち前記条件付き車線についての情報が一致する場合には、当該道路の区間の前記条件付き車線についての車線情報を補完対象とする、
ことを特徴とする情報端末。
【請求項5】
請求項1〜4のいずれか一項に記載の情報端末であって、
前記車線情報補完手段は、欠損している前記所定の道路の区間の長さが、所定距離より長い場合であって、当該道路の区間を通過するのにかかる通過予測時間が所定時間より短い場合には、当該道路の区間の前記条件付き車線についての車線情報を補完対象とする、
ことを特徴とする情報端末。
【請求項6】
請求項1〜5のいずれか一項に記載の情報端末であって、
前記車線情報補完手段は、欠損している前記所定の道路の区間の長さが、所定距離より長い場合であって、当該道路の区間を通過するのにかかる通過予測時間が所定時間より短く、当該道路の区間へ到達するのにかかる到達予測時間が所定時間より長い場合には、当該道路の区間の前記条件付き車線についての車線情報を補完対象とする、
ことを特徴とする情報端末。
【請求項7】
請求項1〜6のいずれか一項に記載の情報端末であって、
さらに、現在地を特定する現在地特定手段を備え、
前記車線情報補完手段は、前記補完対象の道路の区間について、当該区間に隣接する所定の道路の区間のうち、現在地に近い区間の条件付き車線についての車線情報を用いて補完する、
ことを特徴とする情報端末。
【請求項8】
請求項1〜7のいずれか一項に記載の情報端末であって、
さらに、前記車線情報補完手段により補完された前記道路の区間の前記車線情報を含む車線情報を用いて、道路の情報を表示する表示手段、
を備えることを特徴とする情報端末。
【請求項9】
コンピュータに、運転を支援する手順を実行させるプログラムであって、
前記コンピュータを、制御手段と、所定の条件を満たすことにより通行可能となる車線の設置状況を含む車線情報を記憶する記憶手段として機能させ、
前記制御手段に対して、
所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定手順と、
前記車線情報欠損判定手順により欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完手順と、
を実行させることを特徴とするプログラム。
【請求項10】
情報端末による運転支援方法であって、
前記情報端末は、
所定の条件を満たすことにより通行可能となる車線の設置状況を含む車線情報を記憶する記憶手段を備え、
所定の道路の区間について、前記車線情報が欠損しているか否かを判定する車線情報欠損判定ステップと、
前記車線情報欠損判定ステップにより欠損していると判定された場合に、当該道路の区間の前記車線情報を補完する車線情報補完ステップと、
を実施することを特徴とする運転支援方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−88236(P2013−88236A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−227878(P2011−227878)
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]