
持ち運び可能な位置決定装置
位置決定装置が開示され、これはこの装置がその位置を予め定められた位置に関して変化するときに、計算された位置情報の読出しのためにページング受信機へ送信するためのページング送信機へ計算された位置情報を自動的に与えるための衛星ナビゲーション受信機を具備している。装置は小さいサイズで経済的な製造の持ち運び可能なユニットとして構成されることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は移動体オブジェクト、人間又は動物の位置または場所を決定するための電子的な個々の物体の位置決め装置に関し、特に双方向のページングシステムの能力、または他の無線通信手段と全地球測位システムを使用することにより移動体オブジェクト、人間または動物の位置または場所を決定するための装置に関する。
【背景技術】
【0002】
相当の範囲の区域にわたって未知の方向で移動できる人またはオブジェクト或いは家畜又はペットのような動物の位置の追跡は多年にわたって、関心をもたれている。既存の無線通信能力を使用する多数のシステムが提案されているが、これらは扱いにくいか、かさばり、高価であるか、それらの欠点の全てを有している。全地球測位システム(GPS)サービスの出現によって、移動するオブジェクトの位置を決定するための比較的廉価な位置決めシステムを提供することができる。これらは典型的に任意の一度の特定時に多数のトラック部隊を有する会社のために位置情報を提供するためにトラックにおいて使用されている。個々のトラックの位置は衛星受信機によりGPS衛星の少なくとも3つから信号を同時受信することにより決定され、その場所はその後記憶されることができるか、いくつかの種類の無線リンクを介して中央受信局へ送信されることができる。さらに無線リンクは双方向通信リンクであってもよく、ここでは位置決定情報はリクエストの受信に応答してのみ送信される。しかしながら全地球測位システム(GPS)は位置データの捕捉が比較的遅いことと、ターゲットオブジェクトが少なくとも3つのGPS衛星に関して視線位置にある空きスペースに存在することに強く依存するという幾つかの欠点を有する。特に小さく持ち運び可能なユニットにおけるさらに別の欠点は、位置決め装置に含まれなければならないGPS受信機が、位置情報が捕捉されGPSシステムから展開される期間に実質的な電気エネルギの使用を必要とすることである。さらに、小型の持ち運び可能なオブジェクト探知機は、GPSシステムによる迅速で効率的な位置決めを可能にするため理想的とはいえない方向に向けられている間は電力の使用を最小にし、さらに非常に簡単で使用が容易でなければならない。
【発明の概要】
【0003】
本発明の明細書に記載されここで請求されているオブジェクト探知機は結合されている少なくとも1つのアンテナを有する移動体通信ユニットを移動体オブジェクトに取付け、移動体通信ユニットの位置座標を得るために移動体通信ユニットからGPSシステムの送信をアクセスし、ページングネットワーク又は他の無線通信ネットワーク、例えばデジタルセルラネットワーク(例えばグローバル・システム・フォー・モバイル・コミュニケーションズ(GSM)、符合分割多元接続(CDMA)、ジェネラル・パケット・ラジオ・サービス(GPRS)または第3世代(3G)通信プロトコル、無線周波数(RF)ベースまたは衛星ベースの移動体電話ネットワーク、又は構内又は広域網(例えばインターネット)の単独又は組み合わせにより移動体通信ユニットから基地局へ位置座標を通信し、顧客または資産所有者に対して人が読取り可能で可聴または他の認識可能な形態で位置座標を出力するステップを含んでいる。
【0004】
本発明の説明の1特徴では、移動体オブジェクト探知機はGPS信号を受信し基地局と通信するための少なくとも1つのアンテナと共に襟またはハーネス或いは類似の装着品に取付けられるか、それらの内部に統合される。移動体オブジェクト探知機は装着されるか、その他の方法で追跡または位置決めされる人間により携帯されることができ、襟またはハーネス或いは類似の装着品に取付けられるか、それらの内部に統合される移動体オブジェクト探知機は追跡又は位置決めされる動物又はオブジェクトの身体または首周辺に位置される。
【0005】
好ましくは、移動体オブジェクト探知機は、例えば衣類、時計、腕輪、腕章、ベルト、ウェストバンド、腕または足首のブレスレット、ネックレス、時計の物品のような装着可能な物品内に埋設或いは集積されるか、例えばキーホルダに対する付属品としてのこのような小さい形状因子である。
【0006】
本発明の別の特徴では、移動体オブジェクト探知機中のGPS受信機が付勢され、GPS位置座標データは移動体オブジェクト、人間又は動物が装着するか携帯する移動体オブジェクト探知機の位置(例えば緯度と経度)を決定するように処理される。
【0007】
本発明の別の特徴では、移動体オブジェクト探知機は、位置情報のリクエストおよびそのリクエストに対する回答において位置情報を含む帰還送信を処理するため、デジタルセルラ通信ネットワーク又は他のRFベース、衛星ベースまたはインターネットベースの通信ネットワークのような無線通信ネットワーク単独でまたは組み合わせて基地局と通信する。
【0008】
本発明の別の特徴では、GPSシステムから得られる座標データは、デジタルセルラ通信ネットワーク又は他のRFベース、衛星ベースまたはインターネットベースの通信ネットワーク単独または組み合わせであっても、基地局またはページングネットワーク或いはその他の無線通信ネットワークで人間が読取り可能な形態に変換されることができ、その後移動体オブジェクト探知機から送信される。
【0009】
本発明の別の特徴では、GPSシステムから得られる座標データは、ページングネットワーク又はデジタルセルラ通信ネットワークまたは基地局のような他の無線通信ネットワークへ移動体オブジェクト探知機から送信する前に移動体オブジェクト探知機で変換され、それによってGPSエネーブル装置は緯度と経度を送信し、それらは装置のファームウェアにより町および所在地住所にマップされ、加入者位置および動きを追跡し監視するために使用される。
【0010】
本発明の別の特徴では、移動体オブジェクト探知機はデジタルセルラ、RFベースまたは衛星ベースの通信ネットワークのような任意の適切な無線通信ネットワークを介して基地局と通信し、それによってGPSシステムから得られる座標データの変換は基地局へ送信する前および後に行われることができる。
【0011】
本発明の別の特徴では、移動体オブジェクト探知機はデータ通信ネットワーク(インターネット)と共に恐らく無線セルラ通信ネットワークを介して、セルラ電話機またはコンピュータを有するユーザのアクセス装置と直接通信する。したがってユーザはユーザのアクセス装置から直接的に移動体オブジェクト探知機への位置の問合せを開始し、ユーザのアクセス装置で警報又は位置応答を受信することができる。
【0012】
このような通信はオーディオ、ビデオ、ファックス、eメール、インスタントメッセージ、テキストメッセージ、ショートメッセージサービス(SMS)メッセージ、インターネットプロトコル、音声、ボイスメール、少なくとも五感のうちの1つにおける振動または刺激により行われることができる。警報は次の通信手段のうちの1つ、即ちSMS、ファックス、eメール、インスタントメッセージ、インターネットプロトコル、音声、ボイスメール、GPRS、CDMA、WAPプロトコル、インターネット又はテキストを介して通信されることができる。
【0013】
本発明のさらに別の特徴では、位置情報の出力は、ユーザにより選択可能であるとき、高声器又はディスプレイを介してテキストまたは発話或いはグラフィック形態で与えられることができる。
【0014】
本発明の別の特徴では、オブジェクト探知システムは地図上に位置情報を描くか、ユーザが手作業で位置情報を描くか或いは位置情報メッセージから移動体オブジェクト探知機の位置を識別することを許容する。
【0015】
本発明の別の特徴では、位置情報の出力は基地局又はページング或いは、デジタルセルラ通信ネットワークのような他の無線通信ネットワーク、或いは他のRFベース、衛星ベースまたはインターネットベースの通信ネットワーク単独又はその組み合わせまたは他の中間局から別の遠隔局へ転送されることができる。
【0016】
本発明のさらに別の特徴では、他の情報は位置データが捕捉された時間、移動体オブジェクト探知機の状態、移動体オブジェクト探知機中のバッテリの状態、移動体オブジェクト探知機が予め定められた範囲内にあるか境界または電子的フェンスを通過したか、或いは警報状態の放送を含めた位置情報の出力に関連されそれらを有してまたはそれらと共に送信されることができる。
【0017】
本発明のさらに別の特徴では、移動体オブジェクト探知システムは自動的に位置情報を決定し、位置情報を報告するためにそれを基地局へ送信するかユーザ位置へダイヤルアップする。
【0018】
本発明のさらに別の特徴では、監視サービスに関連されるサーバ装置が設けられ、これはユーザ(カスタマ)が所望しない位置更新を受信するための移動体オブジェクト探知機「追跡」モードで動作する。サーバは要求に応じてユーザによりアクセスされることができる媒介および情報記憶装置としておよび警報およびマップ情報の発生器として作用する。
【0019】
本発明の別の特徴では、移動体オブジェクト探知機は人間又は動物の医療記録の記憶を行う機能を含んでおり、遠隔健康監視および診察能力と順守監視の能力が与えられる。
【0020】
本発明およびその利点をより完全に理解するため、添付図面と共に以下の説明を参照する。
【図面の簡単な説明】
【0021】
【図1】本発明のオブジェクト探知システムのブロック図である。
【図2】本発明によるオブジェクト探知機の例の概略図である。
【図3A】本発明により襟により支持されるオブジェクト探知機の概略図である。
【図3B】本発明により襟により支持されるオブジェクト探知機の概略図である。
【図3C】本発明により襟により支持されるオブジェクト探知機の概略図である。
【図4】本発明のオブジェクト探知機のブロック図である。
【図5】オブジェクト探知機の通常の動作のフローチャートである。
【図6】付加的な外部制御を受けるオブジェクト探知機の動作のフローチャートである。
【図7】オブジェクト探知機の外部制御を行うために使用される距離依存実施可能システムの概略図である。
【図8】本発明のオブジェクト探知機と共に使用されることができる基地局のブロック図である。
【図9】本発明のオブジェクト探知機と共に使用されることができる基地局の別の実施形態のブロック図である。
【図10】双方向ページングを介して位置データを得る本発明のオブジェクト探知システムの動作のフローチャートである。
【図11】本発明のオブジェクト探知システムの別の実施形態のブロック図である。
【図12A】本発明による基地局の別の実施形態のブロック図である。
【図12B】本発明による基地局のさらに別の実施形態のブロック図である。
【図13】本発明のオブジェクト探知システムの動作の別の実施形態を示す図10のフローチャートの拡大部の図である。
【図14】カスタマ無線セル電話機インターフェース、カスタマウェブインターフェース、追跡サーバコンポーネントを含むバックエンドシステムの1実施形態を示す図である。
【図15】本発明と共に使用されることのできるバックエンドインフラストラクチャ600のさらに別の実施形態を示す図である。
【図16】基地局を介してアクセス可能な種々の特徴を示している加入者装置に提示される1例のウェブインターフェースディスプレイを示す図である。
【図17】本発明の1実施形態による固定または移動体ウェブブラウザ装置を介して追跡/ジオ−フェンス監視および警報構造を加入者が設定することを可能にする1例のウェブインターフェースディスプレイを示す図である。
【図18】本発明の1実施形態による警報を設定するための機能を与える1例のスクリーンディスプレイインターフェースを示す図である。
【図19】本発明の1実施形態による現在のフェンス割当て情報を提供して加入者がフェンスを構成することを可能にするインターフェースを示す図である。
【図20A】本発明の1実施形態によるユーザがフェンス境界を特定することを可能にする例のスクリーンインターフェースを示す図である。
【図20B】本発明の1実施形態によるユーザがフェンス境界を試し表示することを可能にする例のスクリーンインターフェースを示す図である。
【図20C】本発明の1実施形態によるユーザがフェンス境界の位置を変更することを可能にする例のスクリーンインターフェースを示す図である。
【図21】本発明の1実施形態による警報メッセージを受信するために加入者が連絡を割当てることができる1例のディスプレイを示す図である。
【図22】バックエンドシステムにより発生される警報を受ける連絡をユーザが特定することを可能にするエントリフィールドを有する1例のディスプレイを示す図である。
【発明を実施するための形態】
【0022】
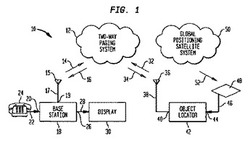
図1を参照すると、本発明のオブジェクト探知システムブロック図を示している。図1では、オブジェクト探知システム10は双方向ページングシステム12と、全地球測位置システム50と、オブジェクト探知機42を含んでいる。双方向ページングシステム12は例えば米国特許第5,423,056号明細書(Lindquist等)に示され記載されているような、技術でよく知られた通常のページングシステムである。双方向ページングシステム12は送信パス14と受信パス16によって基地局18と相互動作する。基地局18は電話機ページャ等を含んでもよく、または通信パス22に沿って電話機セット24からまたは通信パス31によって無線電話機セット25からダイヤルイン電話番号を受信するための入力20を有することができる。基地局18は他の実施形態では本発明のオブジェクト探知システム10と相互動作するためのユーザのエントリの別の動作点である代わりに、双方向ページングシステム12におけるページングサービスの中心であるか、または双方向ページングシステム12と結合される監視サービスであることができる。通常、入力20は電話機セット24または無線20電話機セット25により送信されるデュアルトーンマルチ周波数(DT MF)トーンに応答する。基地局18はさらに出力26を有し、その出力から表示される位置データはパス28に沿ってディスプレイ30へ伝送される。ディスプレイ30は任意の幾つかの形態、例えばテキスト、図、グラフィックまたは数で位置情報を表示するように構成されることができる。別の実施形態では、双方向ページングシステム12は直接RFリンクまたは他の無線通信チャンネルで置換されることができる。双方向ページングシステム12は本発明の概念を機能的に表すために本発明の説明の例示的な実施形態に示されている。
【0023】
図1を続けて参照すると、本発明のオブジェクト探知システム10はオブジェクト探知機42を含んでいる。その動作モードの1つにおいて、双方向ページングトランシーバとしてオブジェクト探知機42はパス32に沿って双方向ページングシステム12により送信される信号を受信しパス34に沿って双方向ページングシステム12へページング信号を送信するためケーブル38に沿ってアンテナ36に結合されている入力40を含んでいる。オブジェクト探知機42はパス52に沿って位置情報信号を全地球測位衛星(GPS)システム50から受信されるための入力44も含んでおり、それによって位置情報信号はアンテナ48により受信されパス46に沿ってオブジェクト探知機42の入力44へ導かれる。全地球測位衛星システム50は例えば米国特許第5,726,660号明細書(Purdy等)に記載されている技術でよく知られた通常の設計である。代わりに、位置情報信号は、このような受信用に構成されている受信システムの使用によりまたは欧州のガリレオ衛星システムを使用してロシアで現在使用中のグラスノスチ衛星システムから受信されることができる。
【0024】
本発明による動物およびペットの追跡に使用されることができるさらに別の衛星システムは中国政府により最近発射されたBaidu衛星システムである。幾つかの実施形態では、移動体オブジェクト探知機装置は改良されたナビゲーションのために多数のシステム(例えばグロナスおよびGPS)から信号を受信できる。
【0025】
動作において、オブジェクト探知機42は本発明のオブジェクト探知システムにより位置を決定されるか追跡される人、オブジェクトまたは動物に携帯または取付けられることを意図される。ユーザはオブジェクト探知機42に対応する電話番号アドレスをダイヤルすることによって基地局18からシステムに入り、探知機は例えば電話機24でページングトランシーバとして機能する。電話番号アドレスは無線電話機25からダイヤルされRFチャンネル31を介して送信されることもできる。DTMF信号はその後パス22に沿って基地局18の入力20へ伝送され、ここでページング送信信号に変換され、送信パス14に沿ってアンテナ15から双方向ページングシステム12へ送信される。双方向ページングシステム12はオブジェクト探知機42へ結合されているアンテナ36へ送信パス32を介してページングメッセージを中継する。ここで以下さらに詳細に説明するように、オブジェクト探知機42は基地局18により送信される位置情報のリクエストを処理し、全地球測位衛星システム50から位置情報を得て、その位置情報を含む応答をアンテナ36からパス34に沿って双方向ページングシステム12へ送信し、双方向ページングシステム12はそれを処理およびディスプレイ30上で表示するために基地局18のアンテナ15へパス16に沿って位置情報信号を中継する。位置情報のこの中継は自動的に行われるかまたは特別な問合せに応答して行われることができる。代わりにアンテナ15と共に無線パス14と16はそれぞれ本社への標準的な電話機接続を具備することができる。したがってページングセンタは位置情報を転送するために基地局の電話番号をダイヤルできる。
【0026】
図2を参照すると、オブジェクト探知機42の概略図が示されており、これは典型的に双方向ページングアンテナ36とGPS受信アンテナ48を有して構成されることができる。双方向ページングアンテナ36はオブジェクト探知機42上の入力40へのケーブル38に沿ってオブジェクト探知機42に結合されている。同様に、GPS受信アンテナ48はオブジェクト探知機42上の入力44へケーブル46に沿って結合されている。図2に示されている双方向ページングアンテナ36はオブジェクト探知機42のこのアンテナが双方向ページング装置で発見されることができる典型的なタイプである事実を表すことを意図されている。このようなアンテナは典型的にページャユニット自体に対して内部に取付けられており、それ故必然的に非常に小さい寸法である。しかしながら、図2に示されているような外部アンテナの使用によって最適化されることができる本発明のオブジェクト探知機42の応用が存在することができる。したがって図2の双方向ページングアンテナ36の図は限定的なものではなく、単なる例示である。GPS受信アンテナ48はそれが平坦で薄く長方形形状の設計であるために通常「パッチアンテナ」と呼ばれている。典型的にこのようなパッチアンテナは上方向で比較的水平に配置されることを意図され、それによってGPSシステムで整列されている衛星から全地球測位衛星システムにより送信される比較的弱い信号を受信するように露出される。図2はしたがってシステムで使用される両アンテナが最適の受信および送信のために配置され、それぞれ双方向ページングアンテナ36とGPS受信アンテナ48用のフレキシブルなケーブル38と46を使用してオブジェクト探知機42へ接続されることができることを立証している。
【0027】
図3a、3b、3cを参照すると、襟45の下部に取付けられているオブジェクト探知機42の概略図が示されている。このような襟45は本発明のオブジェクト探知機10により追跡または位置決めされることを意図されている動物の身体又は首周辺でオブジェクト探知機42を支持するように構成されている。GPSアンテナ48はオブジェクト探知機の位置と直径的に反対の位置で襟に取付けられることが観察されよう。これは以下説明するような意図で行われている。オブジェクト探知機はオブジェクト探知機42の入力44に接続するケーブル46を通してGPSアンテナ48に結合される。この構成は図3Aに示されており、図3Bに示されている断面A−A’を見ることによってさらに明白になる。断面A−A’では、襟上に取り付けられているオブジェクト探知機の側面図が示され、ここで襟45はその下点でオブジェクト探知機42を支持し、その直径的に反対の上点でGPSアンテナ48を支持する。前述したように、GPSアンテナ48はケーブル46を通してオブジェクト探知機42の入力44に結合される。同様に、図3Cに断面で示されている側面図は襟に取付けられたオブジェクト探知機42アセンブリの反対側を示している。断面B−B’では、襟45が示されており、これはその下点でオブジェクト探知機42を支持し、その直径的に反対の上点でパッチアンテナまたはGPSアンテナ48を支持する。さらに断面B−B’にはオブジェクト探知機42の入力40に結合されている双方向ページングアンテナ36が示されている。襟上または襟中に位置決め可能に取付けられた1つのユニットとして探知機およびアンテナを統合し、または代わりに探知機およびアンテナが襟上または襟中に分散されて配置されることを含めて、オブジェクト探知機およびそのアンテナを襟45に配置又は取付けることが可能であることが認識されよう。しかしながらGPSアンテナ48の質量に比較して大きなオブジェクト探知機42の質量と、これらが襟45の反対側に取り付けられることはGPS衛星システム50からの受信を最適化するために、オブジェクト探知機42が常に最も低い可能な位置に残留しGPS受信アンテナが常に最も高い可能な位置に残留することを可能にすることも認識されよう。襟45が追跡または位置決めされる動物の首又は身体周辺に襟を固定するために開かれ閉じられることができるための留め金又はバックルは図3A−3Cには示されていない。多くの構造が可能であり、当業者に明白であろう。
【0028】
好ましい実施形態では、移動体オブジェクト探知機は、例えば衣類、時計、腕輪、腕章、ベルトまたはウェストバンド、腕または足首のブレスレット、ネックレス、時計の物品のような装着可能な物品内に埋設或いは統合されるか、例えばキーホルダに対する付属品としてのこのような小さい形状の要素であることが理解されるべきである。したがって移動体オブジェクト探知機は子供、ペットまたは高齢者によって個別に、がさばらずにまたは固定されて携帯されることができる。さらにこのような小さい形状の要素の移動体オブジェクト探知機は耐水性で防水加工されたハウジングを含んでいる(少なくとも1ファゾムの防水)。
【0029】
図4を参照すると、本発明のオブジェクト探知システム10のオブジェクト探知機42のブロック図が示されている。ページング受信機60又は他のデジタル無線通信受信機はパス64に沿って制御装置66の入力へデータ出力62を結合して示されている。制御装置66は位置データの記憶のためのメモリ68とオブジェクト探知機42を付勢するためのバッテリ70とを含んでいる。このバッテリ70は本発明の実施例では再充電可能なバッテリである。このバッテリ70はNiCadバッテリまたはリチウムイオンバッテリであることができる。通常の結晶シリコン太陽電池、又は例えばテルル化カドミウムから作られた薄膜太陽電池(CdTe電池)のような太陽電池71がバッテリ70を充電するために設けられる。シリコン太陽電池は代わりに銅、インジウム、ガリウム、セレニウム(CIGS)の化合物構造のような多層化装置を具備することができる。再充電されることができる他の高効率の太陽電池はGelバッテリ、GaAs電池、有機物/重合体太陽電池、シリコンの薄膜を含むことができ、シリコンの薄膜は付着のパラメータに基づいてアモルファスシリコン(a−SiまたはSi:H)、プロトクリスタリンシリコンまたはナノクリスタリンシリコン(nc−SiまたはNc−Si:H)を具備する。代わりに、標準的又は再充電可能ではない置換可能なバッテリが同様に使用されることができる。
【0030】
さらに図4に示されているように制御装置66はパス74に沿ってページング受信機又は同様のデジタル無線通信受信機60の制御入力76へ結合されている制御出力72を含んでいる。ページング又は同様のデジタル無線通信受信機60はケーブル38Rに沿ってページング受信機60のRF入力40Rに結合されているアンテナ36Rを介してページングまたは無線通信を受信する。
【0031】
図4を続けて参照すると、GPS受信機78が示されており、それはパス82に沿って出力80の位置データを制御装置66の入力端子84に結合するための設備である。GPS受信機78はさらにパス88に沿って出力86の制御装置66からGPS受信機78のエネーブル入力90へ結合されるエネーブル入力を含んでいる。GPS受信機78はアンテナ48で全地球測位衛星システム50からGPS信号を受信し、その信号はパス46に沿ってGPS受信機78のRF入力44へ結合される。別の実施形態ではGPS受信機78は位置座標を決定する正確度を強化するため差分GPS(D−GPS)信号を受信するように構成されることができる。さらに、D−GPSに加えて、例えば(カルコム社により提供の)gpsOne(商標名)のようにA−GPS(補助GPS)およびHA−GPS(ハイブリッド、補助GPS)のような外部の正確性強化システムを使用する他のGPSシステムは位置座標の決定の正確度を強化するために使用されることができる。例えば3GPP標準で記載されている位置決めサービス(LCS)能力の提供により支配されるネットワーク補助位置決定技術であるE−OTD(強化され観察される時差)を含めた他のネットワーク補助位置決定技術が実行されることができることが理解される。
【0032】
ジオロケーション能力を提供するための非GPSベースの解決策はさらに本発明のオブジェクト探知システムにより使用されるように考慮され、例えばネットワークベースの三角測量およびセルタワー位置決め技術が実行されることができる。例えば知られているネットワークでタワーの相対位置を有する既知の高さのタワーのスパースネットワークを設定することにより、3つのタワーがオブジェクト探知機の位置を三角測量するために使用されることができる。この方法は平面位置の決定に有用であり、少なくとも2つの座標、即ち経度と緯度を決定するために使用されることができ、地球上の任意の位置の決定には十分である。さらに3G(第3世代)MIMO(多入力、多出力)ベースの無線システムは本発明によるジオロケーション応用で使用されることができる。さらに新生のUWB(超広帯域)場所−位置ネットワーク(U−PoLoNets)はオブジェクト探知機の位置追跡に使用されることができる。
【0033】
さらに図4には出力98の制御装置66により与えられる位置データをパス96に沿ってページング送信機92のデータ入力94に送信するように構成されたページング送信機または同様のデジタル無線通信送信機92が示されている。制御装置66はまたパス102に沿ってページング又は同様のデジタル無線通信送信機92のエネーブル入力104へ出力100のエネーブル出力を提供する。ページング送信機92はエネーブルされるとき、データ入力94で受信されたデータを送信し、双方向ページングシステム12へ放射されるように出力端子40Tからパス38Tに沿ってページング送信機アンテナ36Tへ送信されるように信号を結合する。ページングシステムコンポーネントは図4では別個の機能要素として示されているが、実際は参照番号38で表されている共通のアンテナを共有する単一の双方向ページングトランシーバに統合されることができることが認識されよう。図4は双方向ページングシステム12を有するオブジェクト探知機42の通信関係期間に動作する信号パスに関して明瞭性を与えることを意図されている。アンテナをページングトランシーバへ結合するための複数の構造は実現可能であり、技術でもよく知られ、ここではさらに説明しない。
【0034】
代わりにデジタル無線通信送信機を使用するシステムは、エネーブルされるとき、データ入力94で受信されるデータを送信し、セルラ通信ネットワークへ放射されるようにパス38Tに沿って出力端子40Tから無線アンテナ36Tへ送信されるべき信号を結合する。
【0035】
図4の参照を続けると、パス110に沿って制御装置66のエネーブル入力112に結合されている出力108を有する「信号検出器」106とラベル付けされているブロックが示されている。この信号検出器106はオブジェクト探知機42によってオブジェクト探知機42の動作をページング通信又はGPS受信区域外のある外部条件に限定することによってオブジェクト探知機42のさらに正確な制御を可能にすることができる任意の幾つかの随意選択的な装置を表している。図4に示されている例示的な例では、信号検出器106は、その検出しきい値が独立したソースからのアンテナ105により取られた信号エネルギによって交差されるときにはいつでも信号検出器106は出力を提供する。別の実施形態では、信号検出器106はRF信号エネルギ、即ち例えば図4に示されているアンテナ36Rに存在する信号の電界強度雑音又は信号対雑音比を測定するために使用されることができる。このようなしきい値はこの点を超えて例えばオブジェクト探知機が電子フェンス等により動作されることを可能にされる限度点を表しており、又はしきい値はオブジェクト探知機42が例えば基地局の視線内にあるためにその距離内ではオブジェクト探知機の位置が恐らく有用な情報を提供しない距離を表すことができる。或いは、しきい値は時間または高度に関して、或いは方位の方向(heading)として表されることができる。代わりにオブジェクト探知機42はオブジェクト探知機42が周囲外に動くときに警報を作動するようにプログラムされることができる。このような周囲は極限の領域でオブジェクト探知機42の物理的な位置決定をすることによりプログラムされることができ、GPS受信機78が動作している間に、オブジェクト探知機のメモリに報告された座標を記憶し、したがってその外部ではオブジェクト探知機42が自動的に場所を報告する境界を設定する。さらに周囲はオブジェクト探知機メモリに記憶されている少なくとも1つの座標により限定されることができる。周囲はその後、その外部でオブジェクト探知機42が自動的に場所を報告する円形またはその他の幾何学形状の限度を規定するため記憶されたアルゴリズムを選択することにより決定される。
【0036】
図4の参照を続けると、図4に示されている各主要な機能ブロックは非常に小さい寸法のハウジング内に適合するように構成されることができる集積回路により構成されることが認識されよう。例えば典型的に約3から5立方インチの容積を占有するポケットページャは4から6オンスの重量がある可能性がある。制御装置66は種々の機能および動作特性を提供するようにプログラムされることができる単一チップのマイクロプロセッサ又はマイクロ制御装置或いはデジタル信号プロセッサを具備することができる。このようなプログラムはオブジェクト探知機52の動作の制御に置いて制御装置66により使用されるためメモリ68に記憶されることができる。ページング受信機60、ページング送信機92、GPS受信機78は機能ブロックで示されているが、実際にはそこに備えられているそれぞれ複数の複雑な機能を有することができる。したがって多くkの構造および機能動作が図4に示されているブロック図の範囲内で可能である。例えばオブジェクト探知機42のGPS受信機78は制御装置66のタイマー(図示せず)により、まあは代わりにインターネットにわたって受信されたスケジュールされたまたはその場その場の付勢信号を介して、OTA送信を介して、またはセルラ電話機通信ねと又はページングネットワークを介して周期的な間隔でエネーブル又は付勢されることができる。このような周期的な付勢はオブジェクト探知機42を追跡装置として動作するときまたは位置情報を自動的に捕捉してそれをページングシステム又はセルラ電話機システム12または基地局18へ送信するときに有用である。別の実施形態では、GPS受信機78はオブジェクト位置決めサービスを使用する複数のカスタマのベース局として機能する双方向ページングシステム12から、または監視サービスからのコマンドによりエネーブル又は付勢されることができる。このようなページングシステムまたは監視サービスは無線又はワイヤ接続されたチャンネル手段により位置情報をユーザまたは基地局へ通信できる。以下の詳細な説明は本発明のオブジェクト探知システム10の幾つかの基本的な動作特性の説明を例示的に提供する。信号検出器ブロック106により表される1つのこのような特徴を図7と共に以下説明する。
【0037】
図5を参照すると、ユーザがオブジェクト探知機42の位置を決定しようとする場合の図4に示されているオブジェクト探知機42の動作のフローチャートを示している。この状態は例えばペットの犬又はペットの猫、或いは子供またはアルツハイマー又は類似の認知機能障害又は状況を有する可能性のある人の位置を決定するための所有者の労力を含めた任意の数のユーザの活動を表すことができる。同様に、図5に示されている動作は所有者が時間に対して、オブジェクト探知機42が取付けられるオブジェクトを追跡しようとする状態も含むことができる。さらに図5のフローチャートはオブジェクト探知機42が人に取付けられるか携帯されるときの状態を示すこともでき、以下さらに説明するようにある特定の時間又はある他の以前の時間におけるその人の位置を知ることが所望される場合がある。フローはブロック202の動作シーケンスの開始で開始し、その後オブジェクト探知機42がページまたは類似の付勢信号、例えばSMSメッセージ、位置情報のリクエストが双方向ページング受信機60又は類似のデジタル無線通信受信機の入力40により受信されているか否かを決定しようとする決定ブロック204が続く。この決定の結果が否定的であるならばフローは再試行するために決定ブロックの入力に戻る。しかしながら問合せの結果が肯定であるならば、フローはブロック206へ進み、GPS受信機78は図1に示されている全地球測位衛星システム50から信号を回帰することによりオブジェクト探知機42の位置座標の捕捉を可能にされる。
【0038】
オブジェクト探知機42の座標、したがってオブジェクト探知機42が取付けられる個々のオブジェクトまたは動物の座標を適切に捕捉したとき、オブジェクト探知機42はその後座標情報をオブジェクト探知機42の制御装置66のメモリ68へロードすることによりブロック208で座標情報を記憶するように動作する。このような座標情報は時間スタンプと関連付けされることができる。GPS衛星システムから得られるこのような時間スタンプはその後、後の検索のためにブロック208で記憶されることができる。付加的に、このような座標情報はさらにオブジェクト探知機動作状態、送信された信号の強度、しきい値の横断、バッテリ状態、警報信号等のような基地局へ通信するための他の情報に関連されることができる。フローはその後ブロック208から進み、ここで座標はブロック210でメモリ68に記憶され、オブジェクト探知機42は双方向ページングシステム12にわたって受信されるリクエストに応答して座標を送信するように構成されている。座標の送信は位置座表のリクエストがブロック204で受信された同じ双方向ページングシステム12を使用して反対方向で行われる。ブロック210の座標の送信に続いて、フローはオブジェクト探知機42がGPSシステム50から特定時に座標を捕捉しようとする期間である測定された時間間隔を与えるタイマーブロック212へ進む。典型的なGPSシステムは十分な正確度でオブジェクト探知機42の位置を固定するため十分な数の衛星から位置座標情報を捕捉するために実質的な時間量を取ることはよく知られている。必要とされる時間は瞬間から瞬間で広く変化する可能性がある状況下で幾らかの信号を受信することを含んでおり、このことはオブジェクト探知機42のページング受信機60により受信されるリクエストに応答するための完全な位置データを得るための図4に示されているようなGPS受信機78の能力を損なう。ブロック212で動作するタイマーにより表される時間値は例えば5から10分間の程度である可能性がある。ブロック212で、タイマーがタイムアウト値に到達していないならば、フローはオブジェクト探知機52が再度GPSシステム50から座標を捕捉使用としているブロック206の入力に戻る。ブロック212へ戻り、タイマーがその終了値に到達しているならば、フローはブロック212からブロック214へ進み、ルーチンは終了する。この時限ステップは位置情報の獲得および捕捉の機会とGPS受信機78によるパワーの使用を限定する機会を最大にするように動作する。図5はしたがってオブジェクト探知機42の動作の基本モードを示している。この基本動作モードにおける多数の変化が可能であり、オブジェクト探知機42の動作を強化するために使用されることができることが認識されよう。このような特性はオブジェクト探知機42の制御装置66へプログラムされることができる。
【0039】
図6を参照すると、オブジェクト探知機42が基地局又は位置座標のリクエストが開始された幾つかの他の規定された位置に関して距離限度を超える位置にあるとき、この例示的な実施例でGPS受信機78のみから位置情報を得るように付勢される状況におけるオブジェクト探知機42の動作のフローチャートが示されている。図6のフローチャートはさらにオブジェクト探知機42内でGPS受信機78をエネーブルおよびディスエーブルするために使用されることができる動作シーケンスの付加的なステップを示している。先に指摘したように、GPS受信機78は典型的に動作するための実質的な電力を必要とする装置であり、したがって本発明のオブジェクト探知システム10が図4のオブジェクト探知機のバッテリ70から引出される電力を最小にすることが有効である。これはオブジェクト探知機42により必要とされる座標情報を得るのに十分な長さだけ動作可能になるためGPS受信機78の動作サイクルを限定することにより実現されることができる。
【0040】
フローは図6において開始ブロック220で開始し、そこからブロック222へ進み、オブジェクト探知機42はオブジェクト探知機42が位置情報のリクエストを行う基地局又は他の規定された位置から最小距離のように予め定められた限度を超えるか否かを決定する。決定が否定であるならば、即ちオブジェクト探知機42が予め定められた限度を超えないならば、フローは別の試行のために決定ブロック222の入力に戻る。このルーピングはオブジェクト探知機42がオブジェクト探知機42内の回路および本発明のオブジェクト探知システム10の他の部分によって設定された予め定められた限度内にある限り継続する。このような予め定められた限度特性の例示的な例の機能的動作を図7と共に以下さらに説明する。
【0041】
図6のフローチャートに戻ると、フローはオブジェクト探知機52が基地局18から問合せを受信したか否かを決定するために開始ブロック220から決定ブロック222へ進む。問合せが受信されていないならば、フローは「N」パスに沿ってタイマーブロック224へ進み、ここでオブジェクト探知機42は問合せが基地局18から受信されていてもいなくても位置座標を捕捉するようにGPS受信機78を周期的にエネーブルするために時限シーケンスを動作することができる。ブロック224のタイマーがタイムアウトするとき、フローは「Y」パスに沿ってブロック226へ進み、GPS受信機78をエネーブルする。決定ブロック222へ戻り、オブジェクト探知機42が基地局18から問合せを受信するならば、フローは「Y」パスに沿ってブロック226へ進み、GPS受信機78をエネーブルする。
【0042】
図6を続けて参照すると、オブジェクト探知機42のフローはブロック226からブロック228へ進み、オブジェクト探知機42の位置の座標を捕捉する。その後、フローはオブジェクト探知機42が基地局18に関して予め定められた限度を超えるか否かを決定するための決定ブロック229へ進む。ブロック229の決定結果が負であるならば、フローは「N」パスに沿って決定ブロック231へ進み、ここでカウンタはオブジェクト探知機42がブロック229で必要とされている予め定められた限度を超えているか否かを設定するための予め定められた試行数を与える。決定ブロック321のカウンタが終了していないならば、即ち最後のカウントがオブジェクト探知機42が限度を超えているか否かを決定するための全ての試行または試みを完了していないならば、フローは「N」パスに沿って位置座標を捕捉するためブロック228に再入するように進む。ブロック231のカウンタが最後のカウントを終了するとき、フローは「Y」パスに沿って決定ブロック222の入力へ進む。決定ブロック229へ戻り、オブジェクト探知機42が予め定められた限度を超えることが決定されたならば、フローはブロック228で行われたステップ期間にGPS衛星から捕捉された位置座標を記憶するため「Y」パスに沿ってブロック230へ進み、エネーブル端子90に与えられるエネーブル信号はしたがってGPS受信機78を喚起するように動作し、それによってGPSシステムと通信でき、オブジェクト探知機42の位置情報座標を得ることができる。したがって、フローはGPS受信機78がエネーブルされるブロック226からオブジェクト探知機42が全地球測位衛星システム50から座標情報を捕捉するブロック228へ進む。
【0043】
図6の参照を続けると、GPS受信機78からオブジェクト探知機42の座標を捕捉するとき、オブジェクト探知機42内の制御装置66は位置情報を図6の動作ブロック230のオブジェクト探知機42のメモリ68に記憶させる。フローはその後、ブロック232へ進み、ここで制御装置66はGPS受信機78をディスエーブルするように動作し、それによって次にGPSシステム50からの座標情報の捕捉が所望になるまで、もはやバッテリから電力を流し続けない。ブロック232のGPS受信機78のディスエーブルに続いて、フローはブロック234へ進み、オブジェクト探知機42はパス96に沿って出力端子98上の位置データをページング送信機92のデータ入力94へ提供する。位置情報はその後双方向ページングシステム12を介して図1に示されている基地局18へ送信される。フローはブロック234から進み、座標情報をタイムアウトブロック236へ送信し、タイマーはオブジェクト探知機42がGPSシステムから座標情報を捕捉するために許容される時間間隔を提供し、オブジェクト探知機42がインアクチブになる前に座標を捕捉する機会を最大にする。ここでタイムアウト値は典型的に5から10分間の程度であるが、時間期間は特定の使用状態と対応する合法的に任意の値であってもよく、実際には幾つかの応用で調節可能であることができる。ブロック236でタイムアウト値に到達されていない場合、動作はタイムアウトブロック236の入力に戻り、GPSシステムから位置情報を捕捉する試行を継続するようにオブジェクト探知機42をエネーブルする。タイムアウト値に到達した場合、フローは「Y」パスに沿ってブロック236から決定ブロック222への入力におけるシーケンスの開始に戻り、ここでオブジェクト探知機42は前述したようにそのオブジェクト探知機42が予め定められた限度を超えて位置されているか否かをチェックするようにエネーブルされる。
【0044】
バッテリの電力を節約する別の方法として、移動体探知機装置にはペット又は装着者が予め設定された時間量に移動していないとき、例えば装着者が眠っているか静止しているとき、探知機装置をスリープにするように動作可能な加速度計装置が取付けられている。1実施形態では、加速度計装置はピエゾフィルムまたは圧電センサ、Surface Micromachined Capacitive(MEMS)−MEMSICから入手可能なアナログ装置、フリースケール、ハニーウェル、シストロンドナー(BEI)、サーマル(サブミクロンCMOSプロセス)と、VTI Technologiesから入手可能なBulk Micromachined Capacitiveと、Rieker社から入手可能なBulk Micromachined Piezo Resistive、Capacitive Spring Mass Basedと、電気機械サーボ(サーボ力平衡)と、ゼロ平衡型、歪みゲージ型、共振型、磁気誘導型、オプチカル、表面音響波(SAW)型を含むことができる。
【0045】
さらに別のセンサ装置はオブジェクト探知機装置に構成されることができる。例えば運動検出器(例えば加速度計)に加えて、付加的にオブジェクト探知機装置、装置の周囲温度を感知するための温度センサが設けられ、温度センサはここで以下詳細に説明するようにバックエンドインフラストラクチャにより監視され、プログラムされた温度範囲を超過したか否かをユーザへ報告する。
【0046】
図7を参照すると、オブジェクト探知機42へ予め定められた限度信号を提供することを可能にする1構造の概略ブロック図が示されている。図7にはケーブル128を通ってそのアンテナ126と結合され、基地局のアンテナ126の放射パターン特性にしたがって放射される信号を発生するように動作可能な基地局18が示されている。さらに図7にはケーブル124を通ってアンテナ122に結合されている信号検出器ブロック120を含んでいるオブジェクト検出器42が示されている。基地局18は送信モードで動作し、オブジェクト検出器42はアンテナ122を介して受信モードで動作することに注意する。オブジェクト探知機42はアンテナ126から基地局によって送信された信号の受信された信号強度を信号検出器120内に記憶された基準信号と比較することによって、オブジェクト検出器42と基地局18とを分離している距離に関して基地局に関する場所についての決定を行うことができる。この例では基地局18とオブジェクト探知機42との間で測定される信号強度はオブジェクト探知機42を基地局18から分離する距離と比較するとき予測可能な方法では外れることが予測される。限度信号を基準信号と比較するための代替手段はオブジェクト探知機42の受信機の信号対雑音特性を単に使用する。基地局18から信号を獲得又は捕捉することがもはや可能ではないとき、限度が与えられる。限度は基地局の信号強度を単に調節することにより調節されることができる。例示により説明すると、予め定められた限度はしたがって基地局18の信号の信号強度を制御することにより設定されることができ、それによって基地局18を囲む仮想境界130が規定される。信号強度は仮想境界130のオブジェクト探知機42の信号検出器120によりやっと検出されることができる十分に低い値である。したがってオブジェクト探知機42のアンテナ122が基地局18からの半径「r」により示される距離よりも大きいならば、信号は検出されず(または許容可能なしきい値よりも低く)、オブジェクト探知機42は許容可能な半径として考えられることができる距離「r」により表される予め定められた限度を超えるものと予測される。しかしながら、オブジェクト探知機42が基地局18により放射される信号を受信又は検出したならば(または予め定められたしきい値よりも高い)、オブジェクト探知機42のアンテナ122は半径「r」内にあることが予測され、オブジェクト探知機42はその点においてGPSシステム50からの位置情報を捕捉しようとするように付勢されてはならない。
【0047】
図8を参照すると、オブジェクト探知機42から受信された位置情報を処理するため基地局18で実行されることができる構成を含んだブロック図が示されている。図8に示されている1実施形態では、基地局302はケーブル308によりページング受信機304に結合されている受信アンテナ306を有するページング受信機304を含んでいる。ページング受信機304の出力はパス312に沿って出力310でプロセッサ316の入力314へ供給され、プロセッサ316は出力又は表示のために位置情報を受信して処理する。図8の例示的な例では、情報はパス318に沿ってレジスタ320に記憶され、そのレジスタ320から情報は端子324でパス326に沿ってデータディスプレイ330の入力328へ出力するためにパス322に沿ってプロセッサ316により検索される。図8のブロック図により示されているこの簡単な例では、位置情報は経度と緯度の度数の形態、最も近い幹線街路の交差点の名称、または方位の方向のような極座標、基地局302とオブジェクト探知機42との間の距離に関するデータとして表示されるように処理される。別の実施形態では、位置情報はオーディオ出力装置(図8では示さず)を介して発話メッセージとして出力するため処理動作期間中に音声信号に変換または変更されるか、或いは少なくとも英数字符合のような手段を使用して地図上に描くための形態に変換又は変形されることができる。他の代わりの実施形態では、位置情報は基地局18から別の遠隔装置又は局へ転送されることができる。
【0048】
図9を参照すると、ページング受信機304を含む基地局350を示す別の実施形態が示されている。ページング受信機304はオブジェクト探知機42によりケーブル308に沿ってページング受信機304のアンテナ306へ送信された位置情報を受信する。ページング受信機304は出力352からパス354に沿って基地局350のプロセッサ358の入力356へ結合されている。プロセッサ358はパス378に沿ってレジスタ380へのアクセスも有することができ、そのレジスタ380からプロセッサ358はさらにパス382に沿ってレジスタ380から記憶された位置情報を得ることができる。このような位置情報は勿論、アンテナ382とケーブル384を介してGPS受信機368から利用可能であり、その情報は出力370においてパス372に沿ってプロセッサ358の入力374へ結合される。このGPS受信機368は基地局350の一部であり、基地局350がオブジェクト探知機42から得られた位置情報の強化された表示を行うことを可能にする。
【0049】
図9の参照を続けると、パス362に沿って入力364のGPSディスプレイ366への入力へ流れる出力360のプロセッサ358から位置座標に関するデータを得るGPSディスプレイ366が示されている。GPSディスプレイ366は基地局350とオブジェクト探知機42の両者を含む領域のマップを提供し、したがって他に関してオブジェクト探知システム10の各コンポーネントの相対位置を表示するように構成される。GPS表示装置で典型的であるように、街路または公道と共にマップが示されており、ディスプレイに含まれている表示は基地局350とオブジェクト探知機42のそれぞれの位置を示している。別の特徴では、基地局350はページング受信機以外の移動体装置、例えばセルラ電話機、PDA等を含むことができる。
【0050】
図8および9に示されている実施形態は本発明の説明の概念および原理を示す目的で説明されており、この特定の実施形態に限定されず単なる例示である。英数字テキスト、発話メッセージまたはマップ表示の形態の位置情報の出力は考慮されることができる任意の幾つかの構造で実行されることができる。さらにいずれの出力手段が所望であるかユーザが選択することを可能にするための設備も含まれることができる。さらに、位置情報のある出力は選択された出力の代わり又はそれに加えて警報によって示されるか、その警報を伴うことができる。さらに、出力は例えばテキストフォーマットまたは発話フォーマットであるとき、与えられる情報はオブジェクト探知機42が使用されている領域の地理的マップ上に位置座標を手作業で描くことに使用されることができる。本発明のさらに別の実施形態では、GPS受信機により発生される座標データの処理は位置情報をページングシステム12または基地局18(図1参照)へ送信する前にオブジェクト探知機42の制御装置66(図4参照)により人間に読取り可能な形態に座標データを変換又は変更することを含むことができる。本発明のさらに別の実施形態では、位置情報は基地局18から別の遠隔装置又は局へ転送されることができる。
【0051】
図10を参照すると、図1に示されているように本発明のオブジェクト探知システム10の組合されたユニットの動作のフローチャートが示されている。フローはブロック402で開始し、ここでルーチンが開始し、基地局18がオブジェクト探知機42をページングすることにより位置情報をリクエストするブロック404へ進む。このブロック404で、基地局18は位置情報についてのリクエストをオブジェクト探知機42へ送信する。フローはブロック404からブロック412へ進み、オブジェクト探知機42は新しい位置座標情報を得るためにGPS受信機78をエネーブルするためのシーケンスを通って進む。それにおいて、フローはブロック406へ進み、オブジェクト探知機42はその固有のメモリをチェックし(例えば図4に示されているオブジェクト探知機42のブロック図を参照のこと)フローはブロック408へ進み、ここでオブジェクト探知機42は実際にそのメモリに座標が存在するか否かを決定する。結果が肯定であるならば、フローは「Y」パスに沿ってブロック410へ進み、ここでそのメモリに記憶された座標が現在であるか否かの決定をオブジェクト探知機42によって行う。ブロック410の結果が肯定であるならば、フローは「Y」パスに沿ってブロック420へ進み、ここでオブジェクト探知機42は図4に示されているそのメモリ68から座標情報と取り出し、ブロック422で基地局ヘ座標を送信するようにオブジェクト探知機42を設定する。それにおいて、フローはブロック424へ進み、基地局18はオブジェクト探知機42からリクエストされた座標情報を受信したか否かについての決定を行う。結果が肯定であるならば、フローは「Y」パスに沿ってブロック428へ進み、基地局18が基地局18でユーザに対して座標情報を出力または表示する。それにおいて、フローはブロック428からブロック430へ進み、ルーチンが終了する。
【0052】
図10のブロック424に戻ると、基地局18がリクエストされた座標情報を受信していないことを決定したならば、フローは決定ブロック426へ「N」パスに沿って進む。ブロック426で、基地局18はオブジェクト探知機42の最も最近のページが実際に基地局動作のプロトコル内で許容される最後の試行であったか否かを決定する。結果が肯定ならば、フローは「Y」パスに沿ってブロック418へ進み、ここでオブジェクト探知機42はGPS受信機78をディスエーブルするように動作し、それによってもはやオブジェクト探知機42のバッテリ70からのパワーを使用せず、その後ブロック430へ進みルーチンは終了する。しかしながらブロック426の決定結果が否であったならば、フローはブロック404への入力のルーチンの開始位置に戻り、ここで基地局18はオブジェクト探知機42をページすることを再試行する。
【0053】
図10のブロック408に戻ると、オブジェクト探知機42は位置座標情報が実際にオブジェクト探知機42のメモリ68にあるか否かを決定するためにチェックする。結果が否定であるならば、フローは「N」パスに沿ってブロック414へ進み、オブジェクト探知機42は新しい座標情報を捕捉し、前述したようにブロック416へ進み、オブジェクト探知機42のメモリ68に新しい座標情報を記憶する。フローはその後、ブロック412の入力へ戻り、GPS受信機78がエネーブルされる。
【0054】
前述のオブジェクト位置決めシステムはペットで使用されるものとして開示され、それによってペットの所有者は言うことを聞かないで逃げたペットの位置を決定することができる。探知機は前述したように1実施形態ではページングシステムからの信号の受信に応答してペットの位置を決定する様にトリガーされる。ページングシステムはペットのような移動するオブジェクトへ無線リンクによってメッセージを誘導するために既存のインフラストラクチャを使用する。これはページング送信機の周波数へ同調されるページング受信機を含めることが必要とするだけである。勿論、任意の所定の領域に配置された多数のページング送信機が存在する。ペットが全てのこれらのページング送信機の範囲外でさまようならば、システムは動作しない。これはその後、代わりにペットへの直接RFリンクを必要とする。
【0055】
オブジェクト探知機42がリクエストを受信したならば、探知機42は2つのうち1つを行う。第1に、GPSシステムの先の捕捉動作からその固有のメモリに位置座標が記憶されているか否かを決定するために自分のメモリを単に検索する。記憶されているならば、これらはリクエスト者へ返送されることができる。代わりにGPSシステムがリクエストの受信に応答してオンに切り換えられ、位置が決定される。勿論、前述したように、GPSシステムが捕捉することができない状態に対する備えも行われる。
【0056】
情報がユーザに返送されるとき、開示された実施形態は双方向ページャの使用を含む。これらの双方向ページャはそれらがページングシステムの既存のインフラストラクチャを使用するのが望ましい。これは信号が受信され中央局へ返送されることを可能にする各ページングタワーまたはページング「スティック」に複数の受信機を含ませることにより促進される。この中央局はその後受信された情報を処理し、それをユーザへ転送する。この情報は前述したように座標の形態である。この座標情報はその後任意の多数の方法でユーザへ中継されて戻されることができる。これは実際にページングチャンネルを介してユーザへ返送されることができ、これは約2乃至5分間の冗長を生じる可能性がある。代わりに、これは直接ユーザへ送信されることができ、そこではこのようなインフラストラクチャが設けられている。このインフラストラクチャはセルラ電話機システムの使用を組み込むことさえもできる。いずれにしても、ユーザおよび言うことを聞かないペットの相対位置を決定するために座標をユーザへ中継させることが必要である。使用されることができる双方向システムは通常のシステムであり、このような通常のシステムの1例は米国特許第5,708,971号明細書に記載されている。
【0057】
図11を参照すると、本発明のオブジェクト探知システムの別の実施形態のシステムブロック図が示されている。図11では、オブジェクト探知システム11は基地局18、オブジェクト探知機42、全地球測位衛星システム50を含んでいる。基地局18とオブジェクト探知機42は1対の矢印、即ち矢印21と矢印23により示されている無線リンクによって相互に直接通信する。無線リンク21、23についてさらに以下説明する。基地局18は電話機、ページャ等を含むことができ、または通信パス22に沿って電話機セット24からまたは通信パス31によって無線電話機セット25からダイヤルイン電話番号を受信するための入力20を有することができる。通常、入力20は電話機セット24または無線電話機セット25により送信されたデュアルトーンマルチ周波数(DTMF)トーンに応答する。基地局18はさらに出力26を有し、その出力から表示されるべき位置データがパス28に沿ってディスプレイ30へ伝送される。ディスプレイ30は任意の幾つかの形態、例えばテキスト、図、グラフィックまたは数で位置情報を表示するように構成されることができる。典型的なグラフィック表示では、オブジェクト探知機42が動作している領域のマップはディスプレイ30上で再生されるマップ上に表示されたオブジェクト探知機についての位置座標と共に表示されることができる。無線リンク21、23は基地局と移動局を有し、基地局と移動局との間で送信を中継するために中間局を必要としないシステムの直接RFリンクのような2つの局間で動作可能である任意の無線周波数通信チャンネルであることができる。またはその代わりに、無線リンク21、23は図11に示されているオブジェクト探知機42と基地局18を共にリンクするために衛星通信を使用できる。このようなシステムでは、アンテナ15と36およびそれらの関連される送信および受信構造は勿論、無線リンク21、23により表されるような、その後行われる衛星通信のために構成されている。したがって無線リンク21、23は技術でよく知られている多数の別の手段により構成されることができ、さらに説明しない。図1の例示的な実施形態に示されている1例は基地局18とオブジェクト探知機42との間にRFまたは無線リンクを与えるために双方向ページングシステムを使用する。
【0058】
図11の参照を続けると、本発明のオブジェクト探知システム11はオブジェクト探知機42を含んでいる。オブジェクト探知機42は基地局18から無線リンクで送信された信号を受信するためケーブル38に沿ってアンテナ36に結合される入力40を含んでいる。オブジェクト探知機42はRFパス52を介して全地球測位衛星(GPS)システム50から位置情報をアンテナ48により受信するための入力44も含んでいる。アンテナ48から、GPS信号は入力44へのパス46に沿ってオブジェクト探知機42へ導かれる。GPSシステム50は技術でよく知られた通常の設計であり、1例は米国特許第5,726,660(Purdy等)に記載されている。代わりに、位置情報信号はこのような受信用に構成されている受信システムの使用によってグラスノフチ衛星システムから受信されることができる。
【0059】
動作において、オブジェクト探知機42は本発明のオブジェクト探知システム11により位置を決定され又は追跡される人、オブジェクト又は動物に携帯または取付けられることを意図されている。ユーザは例えばオブジェクト探知機42に対応する電話番号アドレスをダイヤルすることにより基地局からシステムに入る。オブジェクト探知機42は無線リンク23に沿ってリクエスト又は命令を受信するための受信機或いは無線リンク21に沿った基地局18への位置情報の送信機として機能する。前述したように、電話番号は電話機セット24または電話機セット25でダイヤルされることができる。電話機セット24または25により発生されるDTMF信号はパス22によって基地局18の入力20へ結合される。基地局18において、DTMFリクエスト信号は無線信号に変換され、送信パス23に沿ってアンテナ15からアンテナ36へ送信され、アンテナ36はケーブル38に沿ってオブジェクト探知機42に結合されている。オブジェクト探知機42は基地局18により送信される位置情報のリクエストを処理し、全地球測位衛星システム50から位置情報を得て、位置情報を含む応答をアンテナ36からパス21に沿ってアンテナ15へ送信し、アンテナ15は処理およびディスプレイ30上での表示のために基地局18に結合される。代わりに、幾つかの応用では目的に適合される標準的な電話機チャンネルの特別な構造コンポーネントはアンテナ15およびアンテナ36及びそれらの関連される構造と共に無線パス21と23と置換されることができる。
【0060】
図12Aを参照すると、オブジェクト探知機42から受信された位置情報を処理するため前述の図8の基地局302で実行されることができる特性を含んだ基地局303の別の実施形態のブロック図が示されている。図12Aに示されている実施形態では、基地局302はケーブル308によりページング受信機304へ結合されている受信アンテナ306を有するページング受信機304を含んでいる。ページング受信機304の出力はプロセッサ316の入力314へのパス312に沿って出力310で与えられ、プロセッサ316は出力又は表示のための位置情報を受信および処理する。図12Aの例示的な例では、情報はパス318を介してレジスタ320に記憶される。レジスタ320から、情報は端子324でパス326に沿ってデータディスプレイ330の入力328へ出力される前に処理のためプロセッサ316によりパス322を介して検索されることができる。図12Aのブロック図により示されるこの簡単な例では、位置情報は経度および緯度の形態、最も近い幹線街路の交差点の名称、オブジェクト探知機42および基地局18の表示として、または方位の方向のような極座標、基地局302とオブジェクト探知機42との間の距離に関するデータとして表示されるように処理される。
【0061】
図12Aに対応する他の実施形態では、位置情報はディスプレイ330上で再生されるマップ上で描かれる形態に変換または変形されることができる。
【0062】
さらに他の代わりの実施形態では、位置情報は処理動作期間中に図12Aに示されているオーディオ出力338を介して発話メッセージとして出力するための音声信号へ変換又は変更されることができる。オーディオ出力338は音声信号に変換又は変形された位置情報をオーディオ出力338の入力336への線334に沿って出力332から受信する。オーディオ出力338は典型的に例えば高声器を駆動するための十分な電力を有するオーディオ信号を発生するためのオーディオ電力増幅器であってもよい。他の実施形態では、このようなオーディオ出力338は音声メールシステム、電話機接続又は他のオーディオ出力手段を駆動するためのライン出力として構成されることができる。この例示的な例ではオーディオ出力338から、音声又はオーディオ信号はユーザへ再生するように線340に沿って高声器342へ結合される。音声信号に加えて、前述したように警報状態を示すあるアナウンス信号も高声器342または目的用に構成された警報トランスデューサによる再生のために線334に沿ってオーディオ出力338へ結合されることができる。
【0063】
図12Bを参照すると、基地局351の別の実施形態が示されている。基地局351はページング受信機304を含んでいる。ページング受信機304はケーブル308で接続されたページング受信機304のアンテナによってオブジェクト探知機42により送信された位置情報を受信する。ページング受信機304の出力は出力352からパス354に沿って基地局351のプロセッサ358の入力356へ結合される。プロセッサ358はパス378に沿ったレジスタ380へのアクセスを有し、そこからプロセッサ358はさらにパス382に沿ってレジスタ380から記憶された位置情報を得ることができる。このような位置情報は勿論ケーブル398に沿ってGPS受信機368に結合されているアンテナ396を介してGPS受信機368から有効である。位置情報はその後、パス372に沿ってプロセッサ358への入力374へのGPS受信機368からの出力370で結合される。このGPS受信機368は基地局351の一部分であり、基地局351がオブジェクト探知機42から得られる位置情報の強化された表示を提供することを可能にする。この強化された表示は例えばオブジェクト探知機42が動作される領域のマップの提示を含むことができる。
【0064】
図12Bの参照を継続すると、GPSディスプレイ366が示されており、これは先の段落で述べられたように強化表示であり、出力360でプロセッサ358から位置座標に関するデータを獲得し、このデータはパス362に沿って入力364からGPSディスプレイ366へ入力される。GPSディスプレイ366は基地局351とオブジェクト探知機42の両者を含む領域のマップを提供するように構成され、したがって他に関してオブジェクト探知システム10の各コンポーネントの相対位置を表示することができる。さらに図12Bにはプロセッサ358の出力384から線386を介して入力388において音声信号または他のオーディオ周波数信号を受信するように動作可能なオーディオ出力390が示されており、このような信号はプロセッサ358の処理動作期間中の位置情報の変換又は変更から生じる。オーディオ出力390は線392を介して高声器394を駆動するためのオーディオ信号を生成する。音声信号に加えて、警報状態を示すある通知信号は高声器394により再生されるため線386に沿ってオーディオ出力390へ結合されることもできる。オーディオ出力390は典型的に前述したように高声器を駆動するのに十分な電力を有するオーディオ信号を発生するためのオーディオ電力増幅器であってもよい。他の実施形態では、このようなオーディオ出力は音声メールシステム、電話機接続又は他のオーディオ手段を駆動するための線出力として構成されることができる。
【0065】
図12Aと12Bはこれらの図12Aと12Bに示されているページングシステムおよびページング受信機304で幾つかの他の無線リンクを単に置換することにより図11のオブジェクト探知システム11を構成できることが認識されよう。GPSディスプレイユニットで典型的であるように、そこに示されている街路および公道と共にマップが示されており、ディスプレイに含まれている表示は基地局350とオブジェクト探知機42のそれぞれの位置を示している。さらに前述したように、街路名、経度、緯度、方位又は距離を与える読出し陳述も表示された出力に含まれることができる。
【0066】
図12Aと12Bに示されている実施形態は例示であり本発明の概念および原理を示すものであり、本発明は特定の実施形態に限定されない。英数字テキスト、発話メッセージまたはマップ表示の形態の位置情報の出力は考慮されることができる任意の幾つかの構造で実行されることができる。さらに図12Aと12Bに示されているような幾つかの異なる出力構造を含み、ユーザがいずれの出力手段が所望であるかを選択することを可能にする設備も前述したシステムに組み込まれることができる。位置情報のある出力は選択された出力の代わり又はそれに加えて警報によって示されるか、その警報を伴うことができる。さらに、出力は例えばテキストフォーマットまたは発話フォーマットであるとき、与えられる情報はオブジェクト探知機42が使用されている領域の地理的マップ上に位置座標を手作業で描くことに使用されることができる。本発明のさらに別の実施形態では、GPS受信機により発生される座標データの処理は位置情報をオブジェクト探知機42から基地局18(図1参照)へ送信する前にオブジェクト探知機42の制御装置66(図4参照)により人間に読取り可能な形態に座標データを変換又は変更することを含むことができる。
【0067】
図13を参照すると、図10のフローチャートと図4のブロック図に示されているオブジェクト探知システム10に対する別の実施形態の動作のフローチャートの拡大部が示されている。図13はオブジェクト探知機42がオブジェクト探知システム10の機能を強化するためにオブジェクト探知システム10の動作に関する他の情報を位置座標情報に関連付けするように動作可能である2つのケースを示している。図13の例はバッテリ状態または境界に対するオブジェクト探知機の関係またはオブジェクト探知機42から基地局18へ送信されることができる位置座標情報を有するしきい値についての関連情報を示している。図13の検査により、フローはブロック404で開始しブロック412を通って継続し、これらのブロックはそれぞれ402の開始ブロックに続くフローチャート中の連続ブロックとして図10でも見られることが観察される。
【0068】
図13の参照を続けると、ブロック404で開始し、ここで図1の基地局18(または図8、9、12Aと12Bの基地局)はオブジェクト探知機42をページし、フローはブロック405へ進み、ここでオブジェクト探知機42は基地局18からページを受信する。基地局18からページを受信すると、決定ブロック407でオブジェクト探知機はその後バッテリ70の検査を実行し、GPSシステム50からの位置座標情報の捕捉へ進行するのに十分なバッテリ容量が存在するか否かを決定する。バッテリ検査により十分なバッテリ容量が存在することが示されたならば、フローは「Y」パスに沿って決定ブロック411へ進み、ここでオブジェクト探知機42はしきい値を超えたか否かを決定する第2の検査を行う。例えばオブジェクト探知機42は基地局18から送信されている信号の強度によって、または電子フェンスの境界の横断を示す信号の受信によって設定された予め定められた範囲内又はその範囲を超える可能性がある。決定ブロック411で行われた決定が肯定である場合、フローはオブジェクト探知機42のGPS受信機78をエネーブルするために「Y」パスに沿ってブロック412へ進む。それにおいてフローは図10に示されているようなフローチャートのステップに進む。
【0069】
図13の参照を続けると、しかしながら図13の決定ブロック407で行われるバッテリ検査が否であり、バッテリ70がGPSシステム50からの完全な位置座標情報の捕捉を行うのに十分な容量を持たないことを示したならば、フローは「N」パスに沿ってブロック409へ進み、ここでオブジェクト探知機42中の制御装置66(図4参照)はバッテリ70が十分な容量をもたないことを示すために低バッテリの警報バイトをフェッチする。この低バッテリ検査警報バイトはオブジェクト探知機42の送信機に与えられ、ブロック415に示されているように、オブジェクト探知機42はこの警報バイトを基地局18へ送信するように動作可能である。低バッテリ検査を示す警報バイトの送信に続いて、フローはブロック415からブロック417へ進み、ここでルーチンは終了する。オブジェクト探知機42がしきい値検査を行うブロック411へ戻り、決定ブロック411の検査の決定が否であるならば、フローは「N」パスに沿ってブロック413へ進み、ここでオブジェクト探知機42の制御装置66は「範囲外」の警報バイトをフェッチし、それを送信機へ送信してブロック415で警報バイトとして基地局18へ送信される。それにおいて、フローは先のようにブロック417へ進み、ルーチンは終了する。
【0070】
図14はカスタマ無線セル電話機インターフェース、カスタマウェブインターフェース、追跡サーバコンポーネントを含む本発明のオブジェクト探知システム11のバックエンドインフラストラクチャ500の別の実施形態を示している。特に図14はデジタルセルラ電話機ネットワーク520によって通信するためのセルラ電話機トランシーバが設けられている移動体オブジェクト探知機追跡装置42を含む通信バックエンドシステム500の1例を示している。好ましくは、セルラ通信システムは3Gであり、即ち毎秒128Kbpsから数メガビットの範囲の速度を有する高速度マルチメディアデータに適合する。知られているように、3Gシステムは地域的に欧州UMTS(ユニバーサル・モバイル・テレコミュニケーション・システム)、北米(CDMA2000)、日本(NTT DoXoMo)で実用されている。高度ローミング特性を有する3G型の無線ネットワークを介して、信号はどこへでも伝播でき、自動的に他の無線システム、例えばインハウス電話機システム、セルラ、衛星等へ自動的にハンドオフされることができる。代わりにまたはさらに、構成されたセルラ電話機ネットワークは一般的なキャリアにより通常動作されるタイプのこれらの無線の広域網(例えばWWAN)を具備し、これはAMPS(線真移動電話システム)、GSM(グローバル・システム・フォー・モバイル・コミュニケーションズ)、GPRS(汎用パケット無線サービス)、CDPD(セルラデジタルパケットデータ)、TDMA(時分割多重アクセス)、1×RTT(1×無線送信技術)、CDMA(符合分割多重アクセス)、EDGE、W−CDMA、GSM/UMTS(ユニバーサル・モバイル・テレコミュニケーション・システム)のようなオープンスタンダードを使用する。このようなデジタルセルラ電話ネットワークはVerizon、Sprint、Cingular、Syniverse等により提供されるものを含むことができる。カスタマが必要又は要望していない日常的な位置座標更新または他の監視情報を受信する追跡サーバ装置530が提供される。サーバ530は要求に応じてアクセスされることができる媒介の情報記憶装置として、および警報およびマップ情報の発生器として作用する。ウェブブラウザ装置550を介して、カスタマはインターネット99およびセルラ電話ネットワーク520を介してオブジェクト探知機へアクセス又は通信を開始することができ、オンラインで追跡サーバ530により受信された移動体探知機装置位置決定座標の実時間ダウンロードを受信できる。代わりに、カスタマのセルラ電話機540を介して、カスタマはセルラ電話ネットワーク520および追跡サーバ530を介してオブジェクト探知機へアクセスするか通信を開始でき、移動体探知機装置位置決定座標の「無線の」ダウンロードを実時間で受信する。通信はそれぞれのカスタマセルラ電話機540を通して開始されるユーザ開始位置問合せ551aを含むことができ、この問合せはセルラ電話ネットワーク520を介してパッケージングおよびフォーマットのため追跡サーバへ送られ、その後装置42で受信するためにセルラ電話ネットワーク520を介して通信されることが理解されよう。同様に、ユーザ開始位置問合せ551bはそれぞれのカスタマウェブブラウザ装置550を通して開始されることができ、この問合せはパッケージングおよびフォーマットのため追跡サーバへ送られ、その後装置42で受信するためにセルラ電話ネットワーク520を介して通信される。
【0071】
さらに別の実施形態では、本発明は3Gエネーブルされた移動体オブジェクト探知機と通信するためWLAN(無線構内網)によって動作するショートメッセージサービス(SMS)データサービスを実行できる。この動作はWLANに転送する前にユーザ開始位置問合せ制御又は類似の付勢メッセージをIPフォーマットへフォーマットすることを伴う。SMSメッセージの受信時に、移動体オブジェクト探知機はその位置座標を得るためにGPSまたは衛星追跡受信機を付勢する。
【0072】
ここで説明するように、追跡サーバからの応答552a、bはルーチンの位置更新、ユーザの問合せを誘導するための位置応答、オブジェクト探知機動作状態、送信された信号の強度、しきい値の超過、バッテリ状態、警報信号等を含むことができる。ユーザのウェブブラウザ装置を介する通信の場合、クライアント接続はSSL(セキュア・ソケット・層)接続を介してそれらのパーソナルコンピュータを使用して加入者により行われる。
【0073】
図15は本発明と共に使用されることのできるバックエンドインフラストラクチャ600のさらに別の実施形態を示している。このシナリオでは、基地局610は例えばGlobalPetFinder、エリコ、ニューヨーク州の追跡/監視サービスプロバイダを有し、これは例えば地理上のフェンス境界を設定するインフラストラクチャと、オブジェクト探知機の追跡サービスを提供し、種々のユーザの特定された装置およびモダリティの警報、例えばSMS、MMS、テキストメッセージ、インスタントメッセージ、eメール、ブラウザ警告等を発生するuLocate(商標名)サービス技術プラットフォーム615のような付加的なパーティサービスと提携している。
【0074】
uLocate(商標名)プラットフォームサービスに加えて、例えば現在の位置および追跡情報を移動体又は固定された装置加入者へ送信する方法としてセル電話ネットワークにより提供されるような任意の位置ベースサービス技術プラットフォームが一体化されることができることが理解される。例えばサービスプロバイダはオブジェクト探知機に組み込まれたGPS受信機チップから位置を得るか、代わりに(例えばGPS特徴のないオブジェクト探知機装置の)最も近いセル電話機タワーの信号強度に基づいた無線位置および三辺測量を使用して、LBSサービスウェブサービスへこの情報を送信することができ、これは適切なチャンネルを介して、例えば任意の無数の通信モダリティの1つを介するウェブサイト又は移動体インターフェースを介してカスタム情報を問合せする所有者の装置へ提供できる。特に図15に示されているように、バックエンドインフラストラクチャ600はさらに強化された無線ネットワークサービスプロバイダ620、例えばSyniverse Technologiesを含んでおり、GPSデータの通信と、移動体、固定された広域ネットワーク間の相互運用性を可能にするゲートウェイおよびデータ接続性を与える。例えば、インフラストラクチャ600では、オブジェクト探知機42は遠隔信号により又は内部で付勢されても、例えばプログラムされた地理上のフェンス境界を横切るとき、そのGPSデータ座標を獲得し、このデータを固定し、例えばSyniverse無線ネットワークサービスへ提供する。GPS位置データはゲートウェイを通して基地局監視サービスプロバイダのウェブサーバ610へ通信されることができる。付加的なパーティサービス、例えばuLocate(商標名)LBSプラットフォームサービスは位置の決定を行い、特定されたユーザ装置540へ返送する通信のための適切な応答メッセージをフォーマットする。例えば地理上のフェンス/ジオコード化サービスを提供するためのプラットフォームを介して、ユーザはそれらのウェブサイトを介して地理上のフェンス境界情報およびプログラム追跡モードを提供するようにエネーブルされる。動作において、プラットフォームは全ての地理上のフェンス情報を受信/処理し、移動体探知機装置のユーザ又はペットがプログラムされた地理上のフェンス境界を離れたときそれを決定する。uLocate(商標名)LBSの解決策はオブジェクト探知機の位置を識別し、潜在的に近くにあるものを発見し、他と位置を共有するために実行されることができる。マッピングAPI(アプリケーションプログラムインターフェース)抽出を提供することによって、uLocate(商標名)サービスは全ての移動体キャリアを横切って標準的なインターフェースを介してLBS警告メッセージングを可能にする、したがって、示されている実施形態では、警告メッセージはuLocate(商標名)サービスを介して発生され、無線通信613で例えばSyniverse Technologiesの無線ネットワーク620から直接的にユーザの移動体装置、例えばPDA、移動体コンピュータ装置、セル電話機へユーザへ転送される。代わりに又はさらに、警告メッセージが発生され、監視サービスのウェブサイト(例えば基地局へ)オンラインアクセスするユーザのウェブブラウザへ押し進められる。したがってuLocate(商標名)サービスはGPSデータを受信し、境界の超過を決定し、警告メッセージの生成を開始してユーザに関連する方法でオブジェクト探知機装置の地理位置についてユーザ又はペット所有者に通知する。したがってuLocate(商標名)の第3パーティサービス補助又は無線ネットワークを介して、オブジェクト探知機42の位置および潜在的な他の関連データ(マップ、ランドマーク、運転方向、追跡歴等)はそのユーザ装置上に表示されるようにサービスのウェブサイト610を介してユーザまたはペット所有者に通報されることができる。
【0075】
uLocate(商標名)プラットフォームサービスに加えて、例えば現在位置および追跡情報を移動体又は固定された装置の加入者へ送信する方法としてセル電話ネットワークにより提供されるような任意の位置ベースのサービス策は一体化されることができることが理解される。例えば、サービスプロバイダはオブジェクト探知機に組込まれたGPS受信機チップから位置を得るか、代わりに(例えばGPS特徴のないオブジェクト探知機装置の)最も近いセル電話機タワーの信号強度に基づいた無線位置および三角測量を使用して、LBSサービスウェブサービスへこの情報を送信することができ、これは適切なチャンネルを介して、例えば任意の無数の通信モダリティの1つを介するウェブサイト又は移動体インターフェースを介して問合せする所有者の装置へカスタム情報を提供できる。
【0076】
図16は基地局を介してアクセス可能な種々の特徴を示しているユーザ装置の1例のウェブインターフェースディスプレイ700を示している。図16に示されているように、加入しているユーザ装置のインターフェースは所有者のペットまたは追跡されるオブジェクトの名称715と、最後に知られた住所および時間スタンプ711を含む追跡されているペット又は人の最後に知られた位置を示すマップ710と、加入者が追跡構造を設定することを可能にする装置管理特徴720と、オブジェクト探知機の電源の残量を示すバッテリ状態インジケータ725と、オブジェクト探知機装置と関連される現在の温度読み取りの指示730と、歩行モードまたは追跡モード機能のユーザプログラミングをエネーブルするモード設定ボタン740と、任意の警報、例えばフェンス外警報、バッテリ警報、移動体装置又はその周辺環境の温度があるしきい値を超えるかそれより低下する時に発生する温度警報がオブジェクト位置で発生されているかを示す警報状態インジケータ750とを含んでいる。
【0077】
ユーザがインターフェース700を介して装置の管理特徴720を選択するときに加入者によりアクセス可能な装置の管理機能の例示が図16に示されており、さらに別のディスプレイ775が図17に示されているように発生され、これによって加入者は追跡/地理上のフェンス監視および警報構造をそれらの固定された又は移動体ウェブブラウザ装置を介して設定することが可能になる。図17に示されているように、ユーザには第1の列780に追跡されるペット又は人の名称が提示され、対応する列782にオブジェクト探知機装置用にプログラムされた現在の地理上のフェンス境界が提示され、対応する列784に警報通知を受けるように指定された連絡先が提示される。図17に示されているように、加入者のアカウントに関連される多数のペットが存在し、さらに追跡されたペット位置情報を転送する多数の方法が存在することが理解される。
【0078】
特定のペットに対しては、ユーザは図17に示されているように、そのペットの構造リンク785、例えば“Hank”を選択することにより警報設定をプログラムできる。構造リンク785を選択した時、さらに別のスクリーンディスプレイ789が発生され、図18に示されている警報の設定の機能を与える。例えば図18に示されているように、温度状態の警報設定は例えば上限温度790a、下限温度790bを設定できる。さらに、ユーザは迷子のペットまたは人の位置を決定するための情報を与える好ましい方法を示すことができる。例えばフィールド792に示されているように、ユーザは緯度又は経度座標で報告を示すか、又は特定のアドレス或いは距離および方向報告モードで報告を示すことができる。インターフェース中に示されているエントリフィールド795は動作の監視モード、例えば基本モードを設定し、そこではユーザは迷子のペットまたは人の位置座標を得るために加入者のセル電話機で予め定められた番号をダイヤルすることによって位置を非同期的に要求できる。代わりに、ユーザは動作の「フェンス」モードを設定でき、加入者が仮想的に任意のサイズの地理上のフェンスを設定して追跡機能を開始することを可能にし、それによって加入者は彼らのペットがフェンス境界を出るとすぐに警告されることができる。さらに別のリンク786が図17に示され、それは選択されるときユーザがペット用にプログラムされた地理上のフェンスを編集し、半径を変更または加入者の連絡情報を編集することを可能にする。1つのリンク787は特にバックエンドシステムが加入者を彼らのペットへ誘導できる基準点として1位置を設定することを可能にする追跡点の特定に専用とされる。1実施形態では、オブジェクト探知システムは最初に加入者を誘導するためのアドレスを発見しようとし、それができないならば、加入者は特定された追跡点から距離および方向の形態でペットの位置を受信する。例えばユーザがユーザの家の正面に追跡点を設定し、その加入者のペットが所在地住所のないブロックに逃げ込んだならば、加入者は例えば「Fidoが離れ、家から50フィート西にいる」というフォーマットで警告を受け、ここでの「家」は加入者が追跡点に割当てた名称である。
【0079】
特に、図19に示されている装置の管理スクリーンインターフェース789を介して、加入者にはバックエンドシステムの基地局に記憶されているペットについての現在のフェンス割当て情報803が与えられる。加入者は示されている加入者のペットについてのフェンス境界の絵地図807の生成および表示を行うプレビューボタン806を選択できる。代わりにまたはさらに、加入者はフェンスの作成時に先に特定されたようにフェンス810の名称(“Jenの家?”)を選択し、例えばペット“Hank”へ割当てるためにはペットに対する“Assign Fence”ボタン813を選択することにより、ペットの任意の先に構成されたフェンスを割当てることができる。プレビューボタン816の選択はその割当てられたフェンス(“Jenの家?”)(図示せず)の絵地図の表示の観察を可能にする。
【0080】
さらに、図19に示されているスクリーンインターフェース789を介して、加入者には示されたペット、例えばペット“Hank”について新しいフェンスを作成するためのリンク820が与えられる。即ち、選択リンク820に応答してインターフェースディスプレイ850は図20Aに示されているように提示され、ユーザがフェンス境界を特定することを可能にする。エントリフィールド853はユーザがフェンスで囲まれた領域の原点を特定することを可能にし、特定のフェンス境界の名称付け(例えばSimpsonの家)をするためのエントリフィールド854を含んでいる。エントリフィールド855は示されたアドレスを有する原点を囲んでいるフェンス境界の半径に加入者が入ることを可能にする。図20Bに示されているように、フェンスを作成するために原点(アドレス)と半径(地理上のフェンス境界)を含む情報846の入力後、ディスプレイ上のアイコンにより表される原点アドレス849を囲む地理上のフェンス境界847を示すプレビュー845が表示される。1実施形態では、ユーザがフェンスを作成するためにアドレスを入力するならば、バックエンドシステムは家の中心を直接街路上に置き、加入者の家は実際には街路から奥まっているか地所のより後方向に位置される可能性がある。システムは図20Bに提示されているユーザインターフェースを介して加入者が調節を行うことを可能にする。例えば図20Bに示されているように、ユーザは加入者がフェンスの新しい中心にしようとしている位置、例えば位置839をクリックすることによりプレビュースクリーン845内でフェンスを動かすことができる。即ち、システムがフェンスのプレビューを表示した後、ユーザはフェンスの位置を中央化し直すためにマップ上のあらゆる所をクリックするようにカーソルを操作することができる。これが行われると、図20Bのプレビューを介して入力された位置に対応して図20Cに示されているプレビューディスプレイ845’に示されている新しい位置839'の原点のプレビューを有する新しい位置の原点でフェンスが作成される。このプロセスは加入者が入力したがっていること以外の事へ実際のアドレスを変更することができる。しかしながら計算された新しいアドレスが、設定されたフェンスの適切なアドレスであると衛星が理解しているアドレスであるとき、この変更は無視される。
【0081】
加入者により作成される各新しいフェンスは加入者のペットに関連付けするために記憶されることが理解される。
【0082】
再び図17を参照すると、装置管理スクリーンインターフェース789を介して、加入者は警報の送信を受ける連絡先と警報のメッセージングモダリティ、例えばSMS、eメール忠告等を特定している連絡情報を割当てることができる。“Assign Contacts”ボタン797の選択により、ディスプレイはペット(または人)についての連絡方法の割当てを可能にする加入者に提示される。図21は警報メッセージを受信するために加入者が連絡を割当てることができる1例のディスプレイ860を示している。図21に示されているように、加入者が作成した連絡リストを加入者がスクロールして、付加ボタン866の選択により1以上の連絡先を選択することを可能にする第1のドロップダウンリスト865が与えられる。さらに、図21に示されているスクリーンインターフェース860を介して、加入者に対して示されたペット、例えばペット“Hank”についての新しい連絡先を作成するためのリンク670が与えられる。即ち、選択リンク870に応答して、インターフェースディスプレイ880は図22に示されているように提示され、これはユーザが連絡先を特定することを可能にする。インターフェースディスプレイ880を介して、ユーザはエントリフィールド885を介して連絡先名を入力し、エントリフィールド887を介して連絡を受けるための好ましい通信モード、例えばセル電話機またはeメールを特定でき、さらにeメール連絡モードが特定されたならば、新しい連絡先のeメールアドレスの特定を可能にする。1実施形態では、連絡は連絡受け装置として特定されたセル電話機がSMSテキストメッセージング能力を含むことを確実にしなければならない。
【0083】
本発明のさらに別の実施形態では、図14および15に示されているように、バックエンドインフラストラクチャは加入者のペットの健康記録を追跡し、監視し、維持することができる獣医との随意選択的なインターフェースを有することができる。したがって、バックエンドシステムは獣医からその特定のペットが例えば「注射」または歯の検査を必要とすることについてのデータの供給580を受ける。このような通知をデータ供給580の受取りに応答して、バックエンドシステムは加入者のペットが特定のタイプの医療注射および/または良好な健康状態の維持を確実にするために獣医に通院する必要があるという警報を加入者へ発生することができる。例えば加入者はペットが注射を必要とする通知を受信でき、eメールまたはIMメッセージが迅速に発生され、その連絡装置を介して指定された連絡先へ発送される。獣医情報を図14と15に示されている方法でバックエンドシステムへ統合することにより、加入者は彼らのペットの健康に関する臨界的情報を受信できることが確実にされる。さらにこの実施形態に対して、ペットの医療記録がオブジェクト探知機装置のメモリに記憶され表示可能である。したがってペットが非所有者により発見されたならば、少なくともその発見されたペットに関する重要な医療データが検索されることができる。
【0084】
好ましい実施形態を詳細に説明したが、種々の変形、置換、変更が請求項により規定されている本発明の技術的範囲を逸脱せずに行われることができることが理解されるべきである。
【技術分野】
【0001】
本発明は移動体オブジェクト、人間又は動物の位置または場所を決定するための電子的な個々の物体の位置決め装置に関し、特に双方向のページングシステムの能力、または他の無線通信手段と全地球測位システムを使用することにより移動体オブジェクト、人間または動物の位置または場所を決定するための装置に関する。
【背景技術】
【0002】
相当の範囲の区域にわたって未知の方向で移動できる人またはオブジェクト或いは家畜又はペットのような動物の位置の追跡は多年にわたって、関心をもたれている。既存の無線通信能力を使用する多数のシステムが提案されているが、これらは扱いにくいか、かさばり、高価であるか、それらの欠点の全てを有している。全地球測位システム(GPS)サービスの出現によって、移動するオブジェクトの位置を決定するための比較的廉価な位置決めシステムを提供することができる。これらは典型的に任意の一度の特定時に多数のトラック部隊を有する会社のために位置情報を提供するためにトラックにおいて使用されている。個々のトラックの位置は衛星受信機によりGPS衛星の少なくとも3つから信号を同時受信することにより決定され、その場所はその後記憶されることができるか、いくつかの種類の無線リンクを介して中央受信局へ送信されることができる。さらに無線リンクは双方向通信リンクであってもよく、ここでは位置決定情報はリクエストの受信に応答してのみ送信される。しかしながら全地球測位システム(GPS)は位置データの捕捉が比較的遅いことと、ターゲットオブジェクトが少なくとも3つのGPS衛星に関して視線位置にある空きスペースに存在することに強く依存するという幾つかの欠点を有する。特に小さく持ち運び可能なユニットにおけるさらに別の欠点は、位置決め装置に含まれなければならないGPS受信機が、位置情報が捕捉されGPSシステムから展開される期間に実質的な電気エネルギの使用を必要とすることである。さらに、小型の持ち運び可能なオブジェクト探知機は、GPSシステムによる迅速で効率的な位置決めを可能にするため理想的とはいえない方向に向けられている間は電力の使用を最小にし、さらに非常に簡単で使用が容易でなければならない。
【発明の概要】
【0003】
本発明の明細書に記載されここで請求されているオブジェクト探知機は結合されている少なくとも1つのアンテナを有する移動体通信ユニットを移動体オブジェクトに取付け、移動体通信ユニットの位置座標を得るために移動体通信ユニットからGPSシステムの送信をアクセスし、ページングネットワーク又は他の無線通信ネットワーク、例えばデジタルセルラネットワーク(例えばグローバル・システム・フォー・モバイル・コミュニケーションズ(GSM)、符合分割多元接続(CDMA)、ジェネラル・パケット・ラジオ・サービス(GPRS)または第3世代(3G)通信プロトコル、無線周波数(RF)ベースまたは衛星ベースの移動体電話ネットワーク、又は構内又は広域網(例えばインターネット)の単独又は組み合わせにより移動体通信ユニットから基地局へ位置座標を通信し、顧客または資産所有者に対して人が読取り可能で可聴または他の認識可能な形態で位置座標を出力するステップを含んでいる。
【0004】
本発明の説明の1特徴では、移動体オブジェクト探知機はGPS信号を受信し基地局と通信するための少なくとも1つのアンテナと共に襟またはハーネス或いは類似の装着品に取付けられるか、それらの内部に統合される。移動体オブジェクト探知機は装着されるか、その他の方法で追跡または位置決めされる人間により携帯されることができ、襟またはハーネス或いは類似の装着品に取付けられるか、それらの内部に統合される移動体オブジェクト探知機は追跡又は位置決めされる動物又はオブジェクトの身体または首周辺に位置される。
【0005】
好ましくは、移動体オブジェクト探知機は、例えば衣類、時計、腕輪、腕章、ベルト、ウェストバンド、腕または足首のブレスレット、ネックレス、時計の物品のような装着可能な物品内に埋設或いは集積されるか、例えばキーホルダに対する付属品としてのこのような小さい形状因子である。
【0006】
本発明の別の特徴では、移動体オブジェクト探知機中のGPS受信機が付勢され、GPS位置座標データは移動体オブジェクト、人間又は動物が装着するか携帯する移動体オブジェクト探知機の位置(例えば緯度と経度)を決定するように処理される。
【0007】
本発明の別の特徴では、移動体オブジェクト探知機は、位置情報のリクエストおよびそのリクエストに対する回答において位置情報を含む帰還送信を処理するため、デジタルセルラ通信ネットワーク又は他のRFベース、衛星ベースまたはインターネットベースの通信ネットワークのような無線通信ネットワーク単独でまたは組み合わせて基地局と通信する。
【0008】
本発明の別の特徴では、GPSシステムから得られる座標データは、デジタルセルラ通信ネットワーク又は他のRFベース、衛星ベースまたはインターネットベースの通信ネットワーク単独または組み合わせであっても、基地局またはページングネットワーク或いはその他の無線通信ネットワークで人間が読取り可能な形態に変換されることができ、その後移動体オブジェクト探知機から送信される。
【0009】
本発明の別の特徴では、GPSシステムから得られる座標データは、ページングネットワーク又はデジタルセルラ通信ネットワークまたは基地局のような他の無線通信ネットワークへ移動体オブジェクト探知機から送信する前に移動体オブジェクト探知機で変換され、それによってGPSエネーブル装置は緯度と経度を送信し、それらは装置のファームウェアにより町および所在地住所にマップされ、加入者位置および動きを追跡し監視するために使用される。
【0010】
本発明の別の特徴では、移動体オブジェクト探知機はデジタルセルラ、RFベースまたは衛星ベースの通信ネットワークのような任意の適切な無線通信ネットワークを介して基地局と通信し、それによってGPSシステムから得られる座標データの変換は基地局へ送信する前および後に行われることができる。
【0011】
本発明の別の特徴では、移動体オブジェクト探知機はデータ通信ネットワーク(インターネット)と共に恐らく無線セルラ通信ネットワークを介して、セルラ電話機またはコンピュータを有するユーザのアクセス装置と直接通信する。したがってユーザはユーザのアクセス装置から直接的に移動体オブジェクト探知機への位置の問合せを開始し、ユーザのアクセス装置で警報又は位置応答を受信することができる。
【0012】
このような通信はオーディオ、ビデオ、ファックス、eメール、インスタントメッセージ、テキストメッセージ、ショートメッセージサービス(SMS)メッセージ、インターネットプロトコル、音声、ボイスメール、少なくとも五感のうちの1つにおける振動または刺激により行われることができる。警報は次の通信手段のうちの1つ、即ちSMS、ファックス、eメール、インスタントメッセージ、インターネットプロトコル、音声、ボイスメール、GPRS、CDMA、WAPプロトコル、インターネット又はテキストを介して通信されることができる。
【0013】
本発明のさらに別の特徴では、位置情報の出力は、ユーザにより選択可能であるとき、高声器又はディスプレイを介してテキストまたは発話或いはグラフィック形態で与えられることができる。
【0014】
本発明の別の特徴では、オブジェクト探知システムは地図上に位置情報を描くか、ユーザが手作業で位置情報を描くか或いは位置情報メッセージから移動体オブジェクト探知機の位置を識別することを許容する。
【0015】
本発明の別の特徴では、位置情報の出力は基地局又はページング或いは、デジタルセルラ通信ネットワークのような他の無線通信ネットワーク、或いは他のRFベース、衛星ベースまたはインターネットベースの通信ネットワーク単独又はその組み合わせまたは他の中間局から別の遠隔局へ転送されることができる。
【0016】
本発明のさらに別の特徴では、他の情報は位置データが捕捉された時間、移動体オブジェクト探知機の状態、移動体オブジェクト探知機中のバッテリの状態、移動体オブジェクト探知機が予め定められた範囲内にあるか境界または電子的フェンスを通過したか、或いは警報状態の放送を含めた位置情報の出力に関連されそれらを有してまたはそれらと共に送信されることができる。
【0017】
本発明のさらに別の特徴では、移動体オブジェクト探知システムは自動的に位置情報を決定し、位置情報を報告するためにそれを基地局へ送信するかユーザ位置へダイヤルアップする。
【0018】
本発明のさらに別の特徴では、監視サービスに関連されるサーバ装置が設けられ、これはユーザ(カスタマ)が所望しない位置更新を受信するための移動体オブジェクト探知機「追跡」モードで動作する。サーバは要求に応じてユーザによりアクセスされることができる媒介および情報記憶装置としておよび警報およびマップ情報の発生器として作用する。
【0019】
本発明の別の特徴では、移動体オブジェクト探知機は人間又は動物の医療記録の記憶を行う機能を含んでおり、遠隔健康監視および診察能力と順守監視の能力が与えられる。
【0020】
本発明およびその利点をより完全に理解するため、添付図面と共に以下の説明を参照する。
【図面の簡単な説明】
【0021】
【図1】本発明のオブジェクト探知システムのブロック図である。
【図2】本発明によるオブジェクト探知機の例の概略図である。
【図3A】本発明により襟により支持されるオブジェクト探知機の概略図である。
【図3B】本発明により襟により支持されるオブジェクト探知機の概略図である。
【図3C】本発明により襟により支持されるオブジェクト探知機の概略図である。
【図4】本発明のオブジェクト探知機のブロック図である。
【図5】オブジェクト探知機の通常の動作のフローチャートである。
【図6】付加的な外部制御を受けるオブジェクト探知機の動作のフローチャートである。
【図7】オブジェクト探知機の外部制御を行うために使用される距離依存実施可能システムの概略図である。
【図8】本発明のオブジェクト探知機と共に使用されることができる基地局のブロック図である。
【図9】本発明のオブジェクト探知機と共に使用されることができる基地局の別の実施形態のブロック図である。
【図10】双方向ページングを介して位置データを得る本発明のオブジェクト探知システムの動作のフローチャートである。
【図11】本発明のオブジェクト探知システムの別の実施形態のブロック図である。
【図12A】本発明による基地局の別の実施形態のブロック図である。
【図12B】本発明による基地局のさらに別の実施形態のブロック図である。
【図13】本発明のオブジェクト探知システムの動作の別の実施形態を示す図10のフローチャートの拡大部の図である。
【図14】カスタマ無線セル電話機インターフェース、カスタマウェブインターフェース、追跡サーバコンポーネントを含むバックエンドシステムの1実施形態を示す図である。
【図15】本発明と共に使用されることのできるバックエンドインフラストラクチャ600のさらに別の実施形態を示す図である。
【図16】基地局を介してアクセス可能な種々の特徴を示している加入者装置に提示される1例のウェブインターフェースディスプレイを示す図である。
【図17】本発明の1実施形態による固定または移動体ウェブブラウザ装置を介して追跡/ジオ−フェンス監視および警報構造を加入者が設定することを可能にする1例のウェブインターフェースディスプレイを示す図である。
【図18】本発明の1実施形態による警報を設定するための機能を与える1例のスクリーンディスプレイインターフェースを示す図である。
【図19】本発明の1実施形態による現在のフェンス割当て情報を提供して加入者がフェンスを構成することを可能にするインターフェースを示す図である。
【図20A】本発明の1実施形態によるユーザがフェンス境界を特定することを可能にする例のスクリーンインターフェースを示す図である。
【図20B】本発明の1実施形態によるユーザがフェンス境界を試し表示することを可能にする例のスクリーンインターフェースを示す図である。
【図20C】本発明の1実施形態によるユーザがフェンス境界の位置を変更することを可能にする例のスクリーンインターフェースを示す図である。
【図21】本発明の1実施形態による警報メッセージを受信するために加入者が連絡を割当てることができる1例のディスプレイを示す図である。
【図22】バックエンドシステムにより発生される警報を受ける連絡をユーザが特定することを可能にするエントリフィールドを有する1例のディスプレイを示す図である。
【発明を実施するための形態】
【0022】
図1を参照すると、本発明のオブジェクト探知システムブロック図を示している。図1では、オブジェクト探知システム10は双方向ページングシステム12と、全地球測位置システム50と、オブジェクト探知機42を含んでいる。双方向ページングシステム12は例えば米国特許第5,423,056号明細書(Lindquist等)に示され記載されているような、技術でよく知られた通常のページングシステムである。双方向ページングシステム12は送信パス14と受信パス16によって基地局18と相互動作する。基地局18は電話機ページャ等を含んでもよく、または通信パス22に沿って電話機セット24からまたは通信パス31によって無線電話機セット25からダイヤルイン電話番号を受信するための入力20を有することができる。基地局18は他の実施形態では本発明のオブジェクト探知システム10と相互動作するためのユーザのエントリの別の動作点である代わりに、双方向ページングシステム12におけるページングサービスの中心であるか、または双方向ページングシステム12と結合される監視サービスであることができる。通常、入力20は電話機セット24または無線20電話機セット25により送信されるデュアルトーンマルチ周波数(DT MF)トーンに応答する。基地局18はさらに出力26を有し、その出力から表示される位置データはパス28に沿ってディスプレイ30へ伝送される。ディスプレイ30は任意の幾つかの形態、例えばテキスト、図、グラフィックまたは数で位置情報を表示するように構成されることができる。別の実施形態では、双方向ページングシステム12は直接RFリンクまたは他の無線通信チャンネルで置換されることができる。双方向ページングシステム12は本発明の概念を機能的に表すために本発明の説明の例示的な実施形態に示されている。
【0023】
図1を続けて参照すると、本発明のオブジェクト探知システム10はオブジェクト探知機42を含んでいる。その動作モードの1つにおいて、双方向ページングトランシーバとしてオブジェクト探知機42はパス32に沿って双方向ページングシステム12により送信される信号を受信しパス34に沿って双方向ページングシステム12へページング信号を送信するためケーブル38に沿ってアンテナ36に結合されている入力40を含んでいる。オブジェクト探知機42はパス52に沿って位置情報信号を全地球測位衛星(GPS)システム50から受信されるための入力44も含んでおり、それによって位置情報信号はアンテナ48により受信されパス46に沿ってオブジェクト探知機42の入力44へ導かれる。全地球測位衛星システム50は例えば米国特許第5,726,660号明細書(Purdy等)に記載されている技術でよく知られた通常の設計である。代わりに、位置情報信号は、このような受信用に構成されている受信システムの使用によりまたは欧州のガリレオ衛星システムを使用してロシアで現在使用中のグラスノスチ衛星システムから受信されることができる。
【0024】
本発明による動物およびペットの追跡に使用されることができるさらに別の衛星システムは中国政府により最近発射されたBaidu衛星システムである。幾つかの実施形態では、移動体オブジェクト探知機装置は改良されたナビゲーションのために多数のシステム(例えばグロナスおよびGPS)から信号を受信できる。
【0025】
動作において、オブジェクト探知機42は本発明のオブジェクト探知システムにより位置を決定されるか追跡される人、オブジェクトまたは動物に携帯または取付けられることを意図される。ユーザはオブジェクト探知機42に対応する電話番号アドレスをダイヤルすることによって基地局18からシステムに入り、探知機は例えば電話機24でページングトランシーバとして機能する。電話番号アドレスは無線電話機25からダイヤルされRFチャンネル31を介して送信されることもできる。DTMF信号はその後パス22に沿って基地局18の入力20へ伝送され、ここでページング送信信号に変換され、送信パス14に沿ってアンテナ15から双方向ページングシステム12へ送信される。双方向ページングシステム12はオブジェクト探知機42へ結合されているアンテナ36へ送信パス32を介してページングメッセージを中継する。ここで以下さらに詳細に説明するように、オブジェクト探知機42は基地局18により送信される位置情報のリクエストを処理し、全地球測位衛星システム50から位置情報を得て、その位置情報を含む応答をアンテナ36からパス34に沿って双方向ページングシステム12へ送信し、双方向ページングシステム12はそれを処理およびディスプレイ30上で表示するために基地局18のアンテナ15へパス16に沿って位置情報信号を中継する。位置情報のこの中継は自動的に行われるかまたは特別な問合せに応答して行われることができる。代わりにアンテナ15と共に無線パス14と16はそれぞれ本社への標準的な電話機接続を具備することができる。したがってページングセンタは位置情報を転送するために基地局の電話番号をダイヤルできる。
【0026】
図2を参照すると、オブジェクト探知機42の概略図が示されており、これは典型的に双方向ページングアンテナ36とGPS受信アンテナ48を有して構成されることができる。双方向ページングアンテナ36はオブジェクト探知機42上の入力40へのケーブル38に沿ってオブジェクト探知機42に結合されている。同様に、GPS受信アンテナ48はオブジェクト探知機42上の入力44へケーブル46に沿って結合されている。図2に示されている双方向ページングアンテナ36はオブジェクト探知機42のこのアンテナが双方向ページング装置で発見されることができる典型的なタイプである事実を表すことを意図されている。このようなアンテナは典型的にページャユニット自体に対して内部に取付けられており、それ故必然的に非常に小さい寸法である。しかしながら、図2に示されているような外部アンテナの使用によって最適化されることができる本発明のオブジェクト探知機42の応用が存在することができる。したがって図2の双方向ページングアンテナ36の図は限定的なものではなく、単なる例示である。GPS受信アンテナ48はそれが平坦で薄く長方形形状の設計であるために通常「パッチアンテナ」と呼ばれている。典型的にこのようなパッチアンテナは上方向で比較的水平に配置されることを意図され、それによってGPSシステムで整列されている衛星から全地球測位衛星システムにより送信される比較的弱い信号を受信するように露出される。図2はしたがってシステムで使用される両アンテナが最適の受信および送信のために配置され、それぞれ双方向ページングアンテナ36とGPS受信アンテナ48用のフレキシブルなケーブル38と46を使用してオブジェクト探知機42へ接続されることができることを立証している。
【0027】
図3a、3b、3cを参照すると、襟45の下部に取付けられているオブジェクト探知機42の概略図が示されている。このような襟45は本発明のオブジェクト探知機10により追跡または位置決めされることを意図されている動物の身体又は首周辺でオブジェクト探知機42を支持するように構成されている。GPSアンテナ48はオブジェクト探知機の位置と直径的に反対の位置で襟に取付けられることが観察されよう。これは以下説明するような意図で行われている。オブジェクト探知機はオブジェクト探知機42の入力44に接続するケーブル46を通してGPSアンテナ48に結合される。この構成は図3Aに示されており、図3Bに示されている断面A−A’を見ることによってさらに明白になる。断面A−A’では、襟上に取り付けられているオブジェクト探知機の側面図が示され、ここで襟45はその下点でオブジェクト探知機42を支持し、その直径的に反対の上点でGPSアンテナ48を支持する。前述したように、GPSアンテナ48はケーブル46を通してオブジェクト探知機42の入力44に結合される。同様に、図3Cに断面で示されている側面図は襟に取付けられたオブジェクト探知機42アセンブリの反対側を示している。断面B−B’では、襟45が示されており、これはその下点でオブジェクト探知機42を支持し、その直径的に反対の上点でパッチアンテナまたはGPSアンテナ48を支持する。さらに断面B−B’にはオブジェクト探知機42の入力40に結合されている双方向ページングアンテナ36が示されている。襟上または襟中に位置決め可能に取付けられた1つのユニットとして探知機およびアンテナを統合し、または代わりに探知機およびアンテナが襟上または襟中に分散されて配置されることを含めて、オブジェクト探知機およびそのアンテナを襟45に配置又は取付けることが可能であることが認識されよう。しかしながらGPSアンテナ48の質量に比較して大きなオブジェクト探知機42の質量と、これらが襟45の反対側に取り付けられることはGPS衛星システム50からの受信を最適化するために、オブジェクト探知機42が常に最も低い可能な位置に残留しGPS受信アンテナが常に最も高い可能な位置に残留することを可能にすることも認識されよう。襟45が追跡または位置決めされる動物の首又は身体周辺に襟を固定するために開かれ閉じられることができるための留め金又はバックルは図3A−3Cには示されていない。多くの構造が可能であり、当業者に明白であろう。
【0028】
好ましい実施形態では、移動体オブジェクト探知機は、例えば衣類、時計、腕輪、腕章、ベルトまたはウェストバンド、腕または足首のブレスレット、ネックレス、時計の物品のような装着可能な物品内に埋設或いは統合されるか、例えばキーホルダに対する付属品としてのこのような小さい形状の要素であることが理解されるべきである。したがって移動体オブジェクト探知機は子供、ペットまたは高齢者によって個別に、がさばらずにまたは固定されて携帯されることができる。さらにこのような小さい形状の要素の移動体オブジェクト探知機は耐水性で防水加工されたハウジングを含んでいる(少なくとも1ファゾムの防水)。
【0029】
図4を参照すると、本発明のオブジェクト探知システム10のオブジェクト探知機42のブロック図が示されている。ページング受信機60又は他のデジタル無線通信受信機はパス64に沿って制御装置66の入力へデータ出力62を結合して示されている。制御装置66は位置データの記憶のためのメモリ68とオブジェクト探知機42を付勢するためのバッテリ70とを含んでいる。このバッテリ70は本発明の実施例では再充電可能なバッテリである。このバッテリ70はNiCadバッテリまたはリチウムイオンバッテリであることができる。通常の結晶シリコン太陽電池、又は例えばテルル化カドミウムから作られた薄膜太陽電池(CdTe電池)のような太陽電池71がバッテリ70を充電するために設けられる。シリコン太陽電池は代わりに銅、インジウム、ガリウム、セレニウム(CIGS)の化合物構造のような多層化装置を具備することができる。再充電されることができる他の高効率の太陽電池はGelバッテリ、GaAs電池、有機物/重合体太陽電池、シリコンの薄膜を含むことができ、シリコンの薄膜は付着のパラメータに基づいてアモルファスシリコン(a−SiまたはSi:H)、プロトクリスタリンシリコンまたはナノクリスタリンシリコン(nc−SiまたはNc−Si:H)を具備する。代わりに、標準的又は再充電可能ではない置換可能なバッテリが同様に使用されることができる。
【0030】
さらに図4に示されているように制御装置66はパス74に沿ってページング受信機又は同様のデジタル無線通信受信機60の制御入力76へ結合されている制御出力72を含んでいる。ページング又は同様のデジタル無線通信受信機60はケーブル38Rに沿ってページング受信機60のRF入力40Rに結合されているアンテナ36Rを介してページングまたは無線通信を受信する。
【0031】
図4を続けて参照すると、GPS受信機78が示されており、それはパス82に沿って出力80の位置データを制御装置66の入力端子84に結合するための設備である。GPS受信機78はさらにパス88に沿って出力86の制御装置66からGPS受信機78のエネーブル入力90へ結合されるエネーブル入力を含んでいる。GPS受信機78はアンテナ48で全地球測位衛星システム50からGPS信号を受信し、その信号はパス46に沿ってGPS受信機78のRF入力44へ結合される。別の実施形態ではGPS受信機78は位置座標を決定する正確度を強化するため差分GPS(D−GPS)信号を受信するように構成されることができる。さらに、D−GPSに加えて、例えば(カルコム社により提供の)gpsOne(商標名)のようにA−GPS(補助GPS)およびHA−GPS(ハイブリッド、補助GPS)のような外部の正確性強化システムを使用する他のGPSシステムは位置座標の決定の正確度を強化するために使用されることができる。例えば3GPP標準で記載されている位置決めサービス(LCS)能力の提供により支配されるネットワーク補助位置決定技術であるE−OTD(強化され観察される時差)を含めた他のネットワーク補助位置決定技術が実行されることができることが理解される。
【0032】
ジオロケーション能力を提供するための非GPSベースの解決策はさらに本発明のオブジェクト探知システムにより使用されるように考慮され、例えばネットワークベースの三角測量およびセルタワー位置決め技術が実行されることができる。例えば知られているネットワークでタワーの相対位置を有する既知の高さのタワーのスパースネットワークを設定することにより、3つのタワーがオブジェクト探知機の位置を三角測量するために使用されることができる。この方法は平面位置の決定に有用であり、少なくとも2つの座標、即ち経度と緯度を決定するために使用されることができ、地球上の任意の位置の決定には十分である。さらに3G(第3世代)MIMO(多入力、多出力)ベースの無線システムは本発明によるジオロケーション応用で使用されることができる。さらに新生のUWB(超広帯域)場所−位置ネットワーク(U−PoLoNets)はオブジェクト探知機の位置追跡に使用されることができる。
【0033】
さらに図4には出力98の制御装置66により与えられる位置データをパス96に沿ってページング送信機92のデータ入力94に送信するように構成されたページング送信機または同様のデジタル無線通信送信機92が示されている。制御装置66はまたパス102に沿ってページング又は同様のデジタル無線通信送信機92のエネーブル入力104へ出力100のエネーブル出力を提供する。ページング送信機92はエネーブルされるとき、データ入力94で受信されたデータを送信し、双方向ページングシステム12へ放射されるように出力端子40Tからパス38Tに沿ってページング送信機アンテナ36Tへ送信されるように信号を結合する。ページングシステムコンポーネントは図4では別個の機能要素として示されているが、実際は参照番号38で表されている共通のアンテナを共有する単一の双方向ページングトランシーバに統合されることができることが認識されよう。図4は双方向ページングシステム12を有するオブジェクト探知機42の通信関係期間に動作する信号パスに関して明瞭性を与えることを意図されている。アンテナをページングトランシーバへ結合するための複数の構造は実現可能であり、技術でもよく知られ、ここではさらに説明しない。
【0034】
代わりにデジタル無線通信送信機を使用するシステムは、エネーブルされるとき、データ入力94で受信されるデータを送信し、セルラ通信ネットワークへ放射されるようにパス38Tに沿って出力端子40Tから無線アンテナ36Tへ送信されるべき信号を結合する。
【0035】
図4の参照を続けると、パス110に沿って制御装置66のエネーブル入力112に結合されている出力108を有する「信号検出器」106とラベル付けされているブロックが示されている。この信号検出器106はオブジェクト探知機42によってオブジェクト探知機42の動作をページング通信又はGPS受信区域外のある外部条件に限定することによってオブジェクト探知機42のさらに正確な制御を可能にすることができる任意の幾つかの随意選択的な装置を表している。図4に示されている例示的な例では、信号検出器106は、その検出しきい値が独立したソースからのアンテナ105により取られた信号エネルギによって交差されるときにはいつでも信号検出器106は出力を提供する。別の実施形態では、信号検出器106はRF信号エネルギ、即ち例えば図4に示されているアンテナ36Rに存在する信号の電界強度雑音又は信号対雑音比を測定するために使用されることができる。このようなしきい値はこの点を超えて例えばオブジェクト探知機が電子フェンス等により動作されることを可能にされる限度点を表しており、又はしきい値はオブジェクト探知機42が例えば基地局の視線内にあるためにその距離内ではオブジェクト探知機の位置が恐らく有用な情報を提供しない距離を表すことができる。或いは、しきい値は時間または高度に関して、或いは方位の方向(heading)として表されることができる。代わりにオブジェクト探知機42はオブジェクト探知機42が周囲外に動くときに警報を作動するようにプログラムされることができる。このような周囲は極限の領域でオブジェクト探知機42の物理的な位置決定をすることによりプログラムされることができ、GPS受信機78が動作している間に、オブジェクト探知機のメモリに報告された座標を記憶し、したがってその外部ではオブジェクト探知機42が自動的に場所を報告する境界を設定する。さらに周囲はオブジェクト探知機メモリに記憶されている少なくとも1つの座標により限定されることができる。周囲はその後、その外部でオブジェクト探知機42が自動的に場所を報告する円形またはその他の幾何学形状の限度を規定するため記憶されたアルゴリズムを選択することにより決定される。
【0036】
図4の参照を続けると、図4に示されている各主要な機能ブロックは非常に小さい寸法のハウジング内に適合するように構成されることができる集積回路により構成されることが認識されよう。例えば典型的に約3から5立方インチの容積を占有するポケットページャは4から6オンスの重量がある可能性がある。制御装置66は種々の機能および動作特性を提供するようにプログラムされることができる単一チップのマイクロプロセッサ又はマイクロ制御装置或いはデジタル信号プロセッサを具備することができる。このようなプログラムはオブジェクト探知機52の動作の制御に置いて制御装置66により使用されるためメモリ68に記憶されることができる。ページング受信機60、ページング送信機92、GPS受信機78は機能ブロックで示されているが、実際にはそこに備えられているそれぞれ複数の複雑な機能を有することができる。したがって多くkの構造および機能動作が図4に示されているブロック図の範囲内で可能である。例えばオブジェクト探知機42のGPS受信機78は制御装置66のタイマー(図示せず)により、まあは代わりにインターネットにわたって受信されたスケジュールされたまたはその場その場の付勢信号を介して、OTA送信を介して、またはセルラ電話機通信ねと又はページングネットワークを介して周期的な間隔でエネーブル又は付勢されることができる。このような周期的な付勢はオブジェクト探知機42を追跡装置として動作するときまたは位置情報を自動的に捕捉してそれをページングシステム又はセルラ電話機システム12または基地局18へ送信するときに有用である。別の実施形態では、GPS受信機78はオブジェクト位置決めサービスを使用する複数のカスタマのベース局として機能する双方向ページングシステム12から、または監視サービスからのコマンドによりエネーブル又は付勢されることができる。このようなページングシステムまたは監視サービスは無線又はワイヤ接続されたチャンネル手段により位置情報をユーザまたは基地局へ通信できる。以下の詳細な説明は本発明のオブジェクト探知システム10の幾つかの基本的な動作特性の説明を例示的に提供する。信号検出器ブロック106により表される1つのこのような特徴を図7と共に以下説明する。
【0037】
図5を参照すると、ユーザがオブジェクト探知機42の位置を決定しようとする場合の図4に示されているオブジェクト探知機42の動作のフローチャートを示している。この状態は例えばペットの犬又はペットの猫、或いは子供またはアルツハイマー又は類似の認知機能障害又は状況を有する可能性のある人の位置を決定するための所有者の労力を含めた任意の数のユーザの活動を表すことができる。同様に、図5に示されている動作は所有者が時間に対して、オブジェクト探知機42が取付けられるオブジェクトを追跡しようとする状態も含むことができる。さらに図5のフローチャートはオブジェクト探知機42が人に取付けられるか携帯されるときの状態を示すこともでき、以下さらに説明するようにある特定の時間又はある他の以前の時間におけるその人の位置を知ることが所望される場合がある。フローはブロック202の動作シーケンスの開始で開始し、その後オブジェクト探知機42がページまたは類似の付勢信号、例えばSMSメッセージ、位置情報のリクエストが双方向ページング受信機60又は類似のデジタル無線通信受信機の入力40により受信されているか否かを決定しようとする決定ブロック204が続く。この決定の結果が否定的であるならばフローは再試行するために決定ブロックの入力に戻る。しかしながら問合せの結果が肯定であるならば、フローはブロック206へ進み、GPS受信機78は図1に示されている全地球測位衛星システム50から信号を回帰することによりオブジェクト探知機42の位置座標の捕捉を可能にされる。
【0038】
オブジェクト探知機42の座標、したがってオブジェクト探知機42が取付けられる個々のオブジェクトまたは動物の座標を適切に捕捉したとき、オブジェクト探知機42はその後座標情報をオブジェクト探知機42の制御装置66のメモリ68へロードすることによりブロック208で座標情報を記憶するように動作する。このような座標情報は時間スタンプと関連付けされることができる。GPS衛星システムから得られるこのような時間スタンプはその後、後の検索のためにブロック208で記憶されることができる。付加的に、このような座標情報はさらにオブジェクト探知機動作状態、送信された信号の強度、しきい値の横断、バッテリ状態、警報信号等のような基地局へ通信するための他の情報に関連されることができる。フローはその後ブロック208から進み、ここで座標はブロック210でメモリ68に記憶され、オブジェクト探知機42は双方向ページングシステム12にわたって受信されるリクエストに応答して座標を送信するように構成されている。座標の送信は位置座表のリクエストがブロック204で受信された同じ双方向ページングシステム12を使用して反対方向で行われる。ブロック210の座標の送信に続いて、フローはオブジェクト探知機42がGPSシステム50から特定時に座標を捕捉しようとする期間である測定された時間間隔を与えるタイマーブロック212へ進む。典型的なGPSシステムは十分な正確度でオブジェクト探知機42の位置を固定するため十分な数の衛星から位置座標情報を捕捉するために実質的な時間量を取ることはよく知られている。必要とされる時間は瞬間から瞬間で広く変化する可能性がある状況下で幾らかの信号を受信することを含んでおり、このことはオブジェクト探知機42のページング受信機60により受信されるリクエストに応答するための完全な位置データを得るための図4に示されているようなGPS受信機78の能力を損なう。ブロック212で動作するタイマーにより表される時間値は例えば5から10分間の程度である可能性がある。ブロック212で、タイマーがタイムアウト値に到達していないならば、フローはオブジェクト探知機52が再度GPSシステム50から座標を捕捉使用としているブロック206の入力に戻る。ブロック212へ戻り、タイマーがその終了値に到達しているならば、フローはブロック212からブロック214へ進み、ルーチンは終了する。この時限ステップは位置情報の獲得および捕捉の機会とGPS受信機78によるパワーの使用を限定する機会を最大にするように動作する。図5はしたがってオブジェクト探知機42の動作の基本モードを示している。この基本動作モードにおける多数の変化が可能であり、オブジェクト探知機42の動作を強化するために使用されることができることが認識されよう。このような特性はオブジェクト探知機42の制御装置66へプログラムされることができる。
【0039】
図6を参照すると、オブジェクト探知機42が基地局又は位置座標のリクエストが開始された幾つかの他の規定された位置に関して距離限度を超える位置にあるとき、この例示的な実施例でGPS受信機78のみから位置情報を得るように付勢される状況におけるオブジェクト探知機42の動作のフローチャートが示されている。図6のフローチャートはさらにオブジェクト探知機42内でGPS受信機78をエネーブルおよびディスエーブルするために使用されることができる動作シーケンスの付加的なステップを示している。先に指摘したように、GPS受信機78は典型的に動作するための実質的な電力を必要とする装置であり、したがって本発明のオブジェクト探知システム10が図4のオブジェクト探知機のバッテリ70から引出される電力を最小にすることが有効である。これはオブジェクト探知機42により必要とされる座標情報を得るのに十分な長さだけ動作可能になるためGPS受信機78の動作サイクルを限定することにより実現されることができる。
【0040】
フローは図6において開始ブロック220で開始し、そこからブロック222へ進み、オブジェクト探知機42はオブジェクト探知機42が位置情報のリクエストを行う基地局又は他の規定された位置から最小距離のように予め定められた限度を超えるか否かを決定する。決定が否定であるならば、即ちオブジェクト探知機42が予め定められた限度を超えないならば、フローは別の試行のために決定ブロック222の入力に戻る。このルーピングはオブジェクト探知機42がオブジェクト探知機42内の回路および本発明のオブジェクト探知システム10の他の部分によって設定された予め定められた限度内にある限り継続する。このような予め定められた限度特性の例示的な例の機能的動作を図7と共に以下さらに説明する。
【0041】
図6のフローチャートに戻ると、フローはオブジェクト探知機52が基地局18から問合せを受信したか否かを決定するために開始ブロック220から決定ブロック222へ進む。問合せが受信されていないならば、フローは「N」パスに沿ってタイマーブロック224へ進み、ここでオブジェクト探知機42は問合せが基地局18から受信されていてもいなくても位置座標を捕捉するようにGPS受信機78を周期的にエネーブルするために時限シーケンスを動作することができる。ブロック224のタイマーがタイムアウトするとき、フローは「Y」パスに沿ってブロック226へ進み、GPS受信機78をエネーブルする。決定ブロック222へ戻り、オブジェクト探知機42が基地局18から問合せを受信するならば、フローは「Y」パスに沿ってブロック226へ進み、GPS受信機78をエネーブルする。
【0042】
図6を続けて参照すると、オブジェクト探知機42のフローはブロック226からブロック228へ進み、オブジェクト探知機42の位置の座標を捕捉する。その後、フローはオブジェクト探知機42が基地局18に関して予め定められた限度を超えるか否かを決定するための決定ブロック229へ進む。ブロック229の決定結果が負であるならば、フローは「N」パスに沿って決定ブロック231へ進み、ここでカウンタはオブジェクト探知機42がブロック229で必要とされている予め定められた限度を超えているか否かを設定するための予め定められた試行数を与える。決定ブロック321のカウンタが終了していないならば、即ち最後のカウントがオブジェクト探知機42が限度を超えているか否かを決定するための全ての試行または試みを完了していないならば、フローは「N」パスに沿って位置座標を捕捉するためブロック228に再入するように進む。ブロック231のカウンタが最後のカウントを終了するとき、フローは「Y」パスに沿って決定ブロック222の入力へ進む。決定ブロック229へ戻り、オブジェクト探知機42が予め定められた限度を超えることが決定されたならば、フローはブロック228で行われたステップ期間にGPS衛星から捕捉された位置座標を記憶するため「Y」パスに沿ってブロック230へ進み、エネーブル端子90に与えられるエネーブル信号はしたがってGPS受信機78を喚起するように動作し、それによってGPSシステムと通信でき、オブジェクト探知機42の位置情報座標を得ることができる。したがって、フローはGPS受信機78がエネーブルされるブロック226からオブジェクト探知機42が全地球測位衛星システム50から座標情報を捕捉するブロック228へ進む。
【0043】
図6の参照を続けると、GPS受信機78からオブジェクト探知機42の座標を捕捉するとき、オブジェクト探知機42内の制御装置66は位置情報を図6の動作ブロック230のオブジェクト探知機42のメモリ68に記憶させる。フローはその後、ブロック232へ進み、ここで制御装置66はGPS受信機78をディスエーブルするように動作し、それによって次にGPSシステム50からの座標情報の捕捉が所望になるまで、もはやバッテリから電力を流し続けない。ブロック232のGPS受信機78のディスエーブルに続いて、フローはブロック234へ進み、オブジェクト探知機42はパス96に沿って出力端子98上の位置データをページング送信機92のデータ入力94へ提供する。位置情報はその後双方向ページングシステム12を介して図1に示されている基地局18へ送信される。フローはブロック234から進み、座標情報をタイムアウトブロック236へ送信し、タイマーはオブジェクト探知機42がGPSシステムから座標情報を捕捉するために許容される時間間隔を提供し、オブジェクト探知機42がインアクチブになる前に座標を捕捉する機会を最大にする。ここでタイムアウト値は典型的に5から10分間の程度であるが、時間期間は特定の使用状態と対応する合法的に任意の値であってもよく、実際には幾つかの応用で調節可能であることができる。ブロック236でタイムアウト値に到達されていない場合、動作はタイムアウトブロック236の入力に戻り、GPSシステムから位置情報を捕捉する試行を継続するようにオブジェクト探知機42をエネーブルする。タイムアウト値に到達した場合、フローは「Y」パスに沿ってブロック236から決定ブロック222への入力におけるシーケンスの開始に戻り、ここでオブジェクト探知機42は前述したようにそのオブジェクト探知機42が予め定められた限度を超えて位置されているか否かをチェックするようにエネーブルされる。
【0044】
バッテリの電力を節約する別の方法として、移動体探知機装置にはペット又は装着者が予め設定された時間量に移動していないとき、例えば装着者が眠っているか静止しているとき、探知機装置をスリープにするように動作可能な加速度計装置が取付けられている。1実施形態では、加速度計装置はピエゾフィルムまたは圧電センサ、Surface Micromachined Capacitive(MEMS)−MEMSICから入手可能なアナログ装置、フリースケール、ハニーウェル、シストロンドナー(BEI)、サーマル(サブミクロンCMOSプロセス)と、VTI Technologiesから入手可能なBulk Micromachined Capacitiveと、Rieker社から入手可能なBulk Micromachined Piezo Resistive、Capacitive Spring Mass Basedと、電気機械サーボ(サーボ力平衡)と、ゼロ平衡型、歪みゲージ型、共振型、磁気誘導型、オプチカル、表面音響波(SAW)型を含むことができる。
【0045】
さらに別のセンサ装置はオブジェクト探知機装置に構成されることができる。例えば運動検出器(例えば加速度計)に加えて、付加的にオブジェクト探知機装置、装置の周囲温度を感知するための温度センサが設けられ、温度センサはここで以下詳細に説明するようにバックエンドインフラストラクチャにより監視され、プログラムされた温度範囲を超過したか否かをユーザへ報告する。
【0046】
図7を参照すると、オブジェクト探知機42へ予め定められた限度信号を提供することを可能にする1構造の概略ブロック図が示されている。図7にはケーブル128を通ってそのアンテナ126と結合され、基地局のアンテナ126の放射パターン特性にしたがって放射される信号を発生するように動作可能な基地局18が示されている。さらに図7にはケーブル124を通ってアンテナ122に結合されている信号検出器ブロック120を含んでいるオブジェクト検出器42が示されている。基地局18は送信モードで動作し、オブジェクト検出器42はアンテナ122を介して受信モードで動作することに注意する。オブジェクト探知機42はアンテナ126から基地局によって送信された信号の受信された信号強度を信号検出器120内に記憶された基準信号と比較することによって、オブジェクト検出器42と基地局18とを分離している距離に関して基地局に関する場所についての決定を行うことができる。この例では基地局18とオブジェクト探知機42との間で測定される信号強度はオブジェクト探知機42を基地局18から分離する距離と比較するとき予測可能な方法では外れることが予測される。限度信号を基準信号と比較するための代替手段はオブジェクト探知機42の受信機の信号対雑音特性を単に使用する。基地局18から信号を獲得又は捕捉することがもはや可能ではないとき、限度が与えられる。限度は基地局の信号強度を単に調節することにより調節されることができる。例示により説明すると、予め定められた限度はしたがって基地局18の信号の信号強度を制御することにより設定されることができ、それによって基地局18を囲む仮想境界130が規定される。信号強度は仮想境界130のオブジェクト探知機42の信号検出器120によりやっと検出されることができる十分に低い値である。したがってオブジェクト探知機42のアンテナ122が基地局18からの半径「r」により示される距離よりも大きいならば、信号は検出されず(または許容可能なしきい値よりも低く)、オブジェクト探知機42は許容可能な半径として考えられることができる距離「r」により表される予め定められた限度を超えるものと予測される。しかしながら、オブジェクト探知機42が基地局18により放射される信号を受信又は検出したならば(または予め定められたしきい値よりも高い)、オブジェクト探知機42のアンテナ122は半径「r」内にあることが予測され、オブジェクト探知機42はその点においてGPSシステム50からの位置情報を捕捉しようとするように付勢されてはならない。
【0047】
図8を参照すると、オブジェクト探知機42から受信された位置情報を処理するため基地局18で実行されることができる構成を含んだブロック図が示されている。図8に示されている1実施形態では、基地局302はケーブル308によりページング受信機304に結合されている受信アンテナ306を有するページング受信機304を含んでいる。ページング受信機304の出力はパス312に沿って出力310でプロセッサ316の入力314へ供給され、プロセッサ316は出力又は表示のために位置情報を受信して処理する。図8の例示的な例では、情報はパス318に沿ってレジスタ320に記憶され、そのレジスタ320から情報は端子324でパス326に沿ってデータディスプレイ330の入力328へ出力するためにパス322に沿ってプロセッサ316により検索される。図8のブロック図により示されているこの簡単な例では、位置情報は経度と緯度の度数の形態、最も近い幹線街路の交差点の名称、または方位の方向のような極座標、基地局302とオブジェクト探知機42との間の距離に関するデータとして表示されるように処理される。別の実施形態では、位置情報はオーディオ出力装置(図8では示さず)を介して発話メッセージとして出力するため処理動作期間中に音声信号に変換または変更されるか、或いは少なくとも英数字符合のような手段を使用して地図上に描くための形態に変換又は変形されることができる。他の代わりの実施形態では、位置情報は基地局18から別の遠隔装置又は局へ転送されることができる。
【0048】
図9を参照すると、ページング受信機304を含む基地局350を示す別の実施形態が示されている。ページング受信機304はオブジェクト探知機42によりケーブル308に沿ってページング受信機304のアンテナ306へ送信された位置情報を受信する。ページング受信機304は出力352からパス354に沿って基地局350のプロセッサ358の入力356へ結合されている。プロセッサ358はパス378に沿ってレジスタ380へのアクセスも有することができ、そのレジスタ380からプロセッサ358はさらにパス382に沿ってレジスタ380から記憶された位置情報を得ることができる。このような位置情報は勿論、アンテナ382とケーブル384を介してGPS受信機368から利用可能であり、その情報は出力370においてパス372に沿ってプロセッサ358の入力374へ結合される。このGPS受信機368は基地局350の一部であり、基地局350がオブジェクト探知機42から得られた位置情報の強化された表示を行うことを可能にする。
【0049】
図9の参照を続けると、パス362に沿って入力364のGPSディスプレイ366への入力へ流れる出力360のプロセッサ358から位置座標に関するデータを得るGPSディスプレイ366が示されている。GPSディスプレイ366は基地局350とオブジェクト探知機42の両者を含む領域のマップを提供し、したがって他に関してオブジェクト探知システム10の各コンポーネントの相対位置を表示するように構成される。GPS表示装置で典型的であるように、街路または公道と共にマップが示されており、ディスプレイに含まれている表示は基地局350とオブジェクト探知機42のそれぞれの位置を示している。別の特徴では、基地局350はページング受信機以外の移動体装置、例えばセルラ電話機、PDA等を含むことができる。
【0050】
図8および9に示されている実施形態は本発明の説明の概念および原理を示す目的で説明されており、この特定の実施形態に限定されず単なる例示である。英数字テキスト、発話メッセージまたはマップ表示の形態の位置情報の出力は考慮されることができる任意の幾つかの構造で実行されることができる。さらにいずれの出力手段が所望であるかユーザが選択することを可能にするための設備も含まれることができる。さらに、位置情報のある出力は選択された出力の代わり又はそれに加えて警報によって示されるか、その警報を伴うことができる。さらに、出力は例えばテキストフォーマットまたは発話フォーマットであるとき、与えられる情報はオブジェクト探知機42が使用されている領域の地理的マップ上に位置座標を手作業で描くことに使用されることができる。本発明のさらに別の実施形態では、GPS受信機により発生される座標データの処理は位置情報をページングシステム12または基地局18(図1参照)へ送信する前にオブジェクト探知機42の制御装置66(図4参照)により人間に読取り可能な形態に座標データを変換又は変更することを含むことができる。本発明のさらに別の実施形態では、位置情報は基地局18から別の遠隔装置又は局へ転送されることができる。
【0051】
図10を参照すると、図1に示されているように本発明のオブジェクト探知システム10の組合されたユニットの動作のフローチャートが示されている。フローはブロック402で開始し、ここでルーチンが開始し、基地局18がオブジェクト探知機42をページングすることにより位置情報をリクエストするブロック404へ進む。このブロック404で、基地局18は位置情報についてのリクエストをオブジェクト探知機42へ送信する。フローはブロック404からブロック412へ進み、オブジェクト探知機42は新しい位置座標情報を得るためにGPS受信機78をエネーブルするためのシーケンスを通って進む。それにおいて、フローはブロック406へ進み、オブジェクト探知機42はその固有のメモリをチェックし(例えば図4に示されているオブジェクト探知機42のブロック図を参照のこと)フローはブロック408へ進み、ここでオブジェクト探知機42は実際にそのメモリに座標が存在するか否かを決定する。結果が肯定であるならば、フローは「Y」パスに沿ってブロック410へ進み、ここでそのメモリに記憶された座標が現在であるか否かの決定をオブジェクト探知機42によって行う。ブロック410の結果が肯定であるならば、フローは「Y」パスに沿ってブロック420へ進み、ここでオブジェクト探知機42は図4に示されているそのメモリ68から座標情報と取り出し、ブロック422で基地局ヘ座標を送信するようにオブジェクト探知機42を設定する。それにおいて、フローはブロック424へ進み、基地局18はオブジェクト探知機42からリクエストされた座標情報を受信したか否かについての決定を行う。結果が肯定であるならば、フローは「Y」パスに沿ってブロック428へ進み、基地局18が基地局18でユーザに対して座標情報を出力または表示する。それにおいて、フローはブロック428からブロック430へ進み、ルーチンが終了する。
【0052】
図10のブロック424に戻ると、基地局18がリクエストされた座標情報を受信していないことを決定したならば、フローは決定ブロック426へ「N」パスに沿って進む。ブロック426で、基地局18はオブジェクト探知機42の最も最近のページが実際に基地局動作のプロトコル内で許容される最後の試行であったか否かを決定する。結果が肯定ならば、フローは「Y」パスに沿ってブロック418へ進み、ここでオブジェクト探知機42はGPS受信機78をディスエーブルするように動作し、それによってもはやオブジェクト探知機42のバッテリ70からのパワーを使用せず、その後ブロック430へ進みルーチンは終了する。しかしながらブロック426の決定結果が否であったならば、フローはブロック404への入力のルーチンの開始位置に戻り、ここで基地局18はオブジェクト探知機42をページすることを再試行する。
【0053】
図10のブロック408に戻ると、オブジェクト探知機42は位置座標情報が実際にオブジェクト探知機42のメモリ68にあるか否かを決定するためにチェックする。結果が否定であるならば、フローは「N」パスに沿ってブロック414へ進み、オブジェクト探知機42は新しい座標情報を捕捉し、前述したようにブロック416へ進み、オブジェクト探知機42のメモリ68に新しい座標情報を記憶する。フローはその後、ブロック412の入力へ戻り、GPS受信機78がエネーブルされる。
【0054】
前述のオブジェクト位置決めシステムはペットで使用されるものとして開示され、それによってペットの所有者は言うことを聞かないで逃げたペットの位置を決定することができる。探知機は前述したように1実施形態ではページングシステムからの信号の受信に応答してペットの位置を決定する様にトリガーされる。ページングシステムはペットのような移動するオブジェクトへ無線リンクによってメッセージを誘導するために既存のインフラストラクチャを使用する。これはページング送信機の周波数へ同調されるページング受信機を含めることが必要とするだけである。勿論、任意の所定の領域に配置された多数のページング送信機が存在する。ペットが全てのこれらのページング送信機の範囲外でさまようならば、システムは動作しない。これはその後、代わりにペットへの直接RFリンクを必要とする。
【0055】
オブジェクト探知機42がリクエストを受信したならば、探知機42は2つのうち1つを行う。第1に、GPSシステムの先の捕捉動作からその固有のメモリに位置座標が記憶されているか否かを決定するために自分のメモリを単に検索する。記憶されているならば、これらはリクエスト者へ返送されることができる。代わりにGPSシステムがリクエストの受信に応答してオンに切り換えられ、位置が決定される。勿論、前述したように、GPSシステムが捕捉することができない状態に対する備えも行われる。
【0056】
情報がユーザに返送されるとき、開示された実施形態は双方向ページャの使用を含む。これらの双方向ページャはそれらがページングシステムの既存のインフラストラクチャを使用するのが望ましい。これは信号が受信され中央局へ返送されることを可能にする各ページングタワーまたはページング「スティック」に複数の受信機を含ませることにより促進される。この中央局はその後受信された情報を処理し、それをユーザへ転送する。この情報は前述したように座標の形態である。この座標情報はその後任意の多数の方法でユーザへ中継されて戻されることができる。これは実際にページングチャンネルを介してユーザへ返送されることができ、これは約2乃至5分間の冗長を生じる可能性がある。代わりに、これは直接ユーザへ送信されることができ、そこではこのようなインフラストラクチャが設けられている。このインフラストラクチャはセルラ電話機システムの使用を組み込むことさえもできる。いずれにしても、ユーザおよび言うことを聞かないペットの相対位置を決定するために座標をユーザへ中継させることが必要である。使用されることができる双方向システムは通常のシステムであり、このような通常のシステムの1例は米国特許第5,708,971号明細書に記載されている。
【0057】
図11を参照すると、本発明のオブジェクト探知システムの別の実施形態のシステムブロック図が示されている。図11では、オブジェクト探知システム11は基地局18、オブジェクト探知機42、全地球測位衛星システム50を含んでいる。基地局18とオブジェクト探知機42は1対の矢印、即ち矢印21と矢印23により示されている無線リンクによって相互に直接通信する。無線リンク21、23についてさらに以下説明する。基地局18は電話機、ページャ等を含むことができ、または通信パス22に沿って電話機セット24からまたは通信パス31によって無線電話機セット25からダイヤルイン電話番号を受信するための入力20を有することができる。通常、入力20は電話機セット24または無線電話機セット25により送信されたデュアルトーンマルチ周波数(DTMF)トーンに応答する。基地局18はさらに出力26を有し、その出力から表示されるべき位置データがパス28に沿ってディスプレイ30へ伝送される。ディスプレイ30は任意の幾つかの形態、例えばテキスト、図、グラフィックまたは数で位置情報を表示するように構成されることができる。典型的なグラフィック表示では、オブジェクト探知機42が動作している領域のマップはディスプレイ30上で再生されるマップ上に表示されたオブジェクト探知機についての位置座標と共に表示されることができる。無線リンク21、23は基地局と移動局を有し、基地局と移動局との間で送信を中継するために中間局を必要としないシステムの直接RFリンクのような2つの局間で動作可能である任意の無線周波数通信チャンネルであることができる。またはその代わりに、無線リンク21、23は図11に示されているオブジェクト探知機42と基地局18を共にリンクするために衛星通信を使用できる。このようなシステムでは、アンテナ15と36およびそれらの関連される送信および受信構造は勿論、無線リンク21、23により表されるような、その後行われる衛星通信のために構成されている。したがって無線リンク21、23は技術でよく知られている多数の別の手段により構成されることができ、さらに説明しない。図1の例示的な実施形態に示されている1例は基地局18とオブジェクト探知機42との間にRFまたは無線リンクを与えるために双方向ページングシステムを使用する。
【0058】
図11の参照を続けると、本発明のオブジェクト探知システム11はオブジェクト探知機42を含んでいる。オブジェクト探知機42は基地局18から無線リンクで送信された信号を受信するためケーブル38に沿ってアンテナ36に結合される入力40を含んでいる。オブジェクト探知機42はRFパス52を介して全地球測位衛星(GPS)システム50から位置情報をアンテナ48により受信するための入力44も含んでいる。アンテナ48から、GPS信号は入力44へのパス46に沿ってオブジェクト探知機42へ導かれる。GPSシステム50は技術でよく知られた通常の設計であり、1例は米国特許第5,726,660(Purdy等)に記載されている。代わりに、位置情報信号はこのような受信用に構成されている受信システムの使用によってグラスノフチ衛星システムから受信されることができる。
【0059】
動作において、オブジェクト探知機42は本発明のオブジェクト探知システム11により位置を決定され又は追跡される人、オブジェクト又は動物に携帯または取付けられることを意図されている。ユーザは例えばオブジェクト探知機42に対応する電話番号アドレスをダイヤルすることにより基地局からシステムに入る。オブジェクト探知機42は無線リンク23に沿ってリクエスト又は命令を受信するための受信機或いは無線リンク21に沿った基地局18への位置情報の送信機として機能する。前述したように、電話番号は電話機セット24または電話機セット25でダイヤルされることができる。電話機セット24または25により発生されるDTMF信号はパス22によって基地局18の入力20へ結合される。基地局18において、DTMFリクエスト信号は無線信号に変換され、送信パス23に沿ってアンテナ15からアンテナ36へ送信され、アンテナ36はケーブル38に沿ってオブジェクト探知機42に結合されている。オブジェクト探知機42は基地局18により送信される位置情報のリクエストを処理し、全地球測位衛星システム50から位置情報を得て、位置情報を含む応答をアンテナ36からパス21に沿ってアンテナ15へ送信し、アンテナ15は処理およびディスプレイ30上での表示のために基地局18に結合される。代わりに、幾つかの応用では目的に適合される標準的な電話機チャンネルの特別な構造コンポーネントはアンテナ15およびアンテナ36及びそれらの関連される構造と共に無線パス21と23と置換されることができる。
【0060】
図12Aを参照すると、オブジェクト探知機42から受信された位置情報を処理するため前述の図8の基地局302で実行されることができる特性を含んだ基地局303の別の実施形態のブロック図が示されている。図12Aに示されている実施形態では、基地局302はケーブル308によりページング受信機304へ結合されている受信アンテナ306を有するページング受信機304を含んでいる。ページング受信機304の出力はプロセッサ316の入力314へのパス312に沿って出力310で与えられ、プロセッサ316は出力又は表示のための位置情報を受信および処理する。図12Aの例示的な例では、情報はパス318を介してレジスタ320に記憶される。レジスタ320から、情報は端子324でパス326に沿ってデータディスプレイ330の入力328へ出力される前に処理のためプロセッサ316によりパス322を介して検索されることができる。図12Aのブロック図により示されるこの簡単な例では、位置情報は経度および緯度の形態、最も近い幹線街路の交差点の名称、オブジェクト探知機42および基地局18の表示として、または方位の方向のような極座標、基地局302とオブジェクト探知機42との間の距離に関するデータとして表示されるように処理される。
【0061】
図12Aに対応する他の実施形態では、位置情報はディスプレイ330上で再生されるマップ上で描かれる形態に変換または変形されることができる。
【0062】
さらに他の代わりの実施形態では、位置情報は処理動作期間中に図12Aに示されているオーディオ出力338を介して発話メッセージとして出力するための音声信号へ変換又は変更されることができる。オーディオ出力338は音声信号に変換又は変形された位置情報をオーディオ出力338の入力336への線334に沿って出力332から受信する。オーディオ出力338は典型的に例えば高声器を駆動するための十分な電力を有するオーディオ信号を発生するためのオーディオ電力増幅器であってもよい。他の実施形態では、このようなオーディオ出力338は音声メールシステム、電話機接続又は他のオーディオ出力手段を駆動するためのライン出力として構成されることができる。この例示的な例ではオーディオ出力338から、音声又はオーディオ信号はユーザへ再生するように線340に沿って高声器342へ結合される。音声信号に加えて、前述したように警報状態を示すあるアナウンス信号も高声器342または目的用に構成された警報トランスデューサによる再生のために線334に沿ってオーディオ出力338へ結合されることができる。
【0063】
図12Bを参照すると、基地局351の別の実施形態が示されている。基地局351はページング受信機304を含んでいる。ページング受信機304はケーブル308で接続されたページング受信機304のアンテナによってオブジェクト探知機42により送信された位置情報を受信する。ページング受信機304の出力は出力352からパス354に沿って基地局351のプロセッサ358の入力356へ結合される。プロセッサ358はパス378に沿ったレジスタ380へのアクセスを有し、そこからプロセッサ358はさらにパス382に沿ってレジスタ380から記憶された位置情報を得ることができる。このような位置情報は勿論ケーブル398に沿ってGPS受信機368に結合されているアンテナ396を介してGPS受信機368から有効である。位置情報はその後、パス372に沿ってプロセッサ358への入力374へのGPS受信機368からの出力370で結合される。このGPS受信機368は基地局351の一部分であり、基地局351がオブジェクト探知機42から得られる位置情報の強化された表示を提供することを可能にする。この強化された表示は例えばオブジェクト探知機42が動作される領域のマップの提示を含むことができる。
【0064】
図12Bの参照を継続すると、GPSディスプレイ366が示されており、これは先の段落で述べられたように強化表示であり、出力360でプロセッサ358から位置座標に関するデータを獲得し、このデータはパス362に沿って入力364からGPSディスプレイ366へ入力される。GPSディスプレイ366は基地局351とオブジェクト探知機42の両者を含む領域のマップを提供するように構成され、したがって他に関してオブジェクト探知システム10の各コンポーネントの相対位置を表示することができる。さらに図12Bにはプロセッサ358の出力384から線386を介して入力388において音声信号または他のオーディオ周波数信号を受信するように動作可能なオーディオ出力390が示されており、このような信号はプロセッサ358の処理動作期間中の位置情報の変換又は変更から生じる。オーディオ出力390は線392を介して高声器394を駆動するためのオーディオ信号を生成する。音声信号に加えて、警報状態を示すある通知信号は高声器394により再生されるため線386に沿ってオーディオ出力390へ結合されることもできる。オーディオ出力390は典型的に前述したように高声器を駆動するのに十分な電力を有するオーディオ信号を発生するためのオーディオ電力増幅器であってもよい。他の実施形態では、このようなオーディオ出力は音声メールシステム、電話機接続又は他のオーディオ手段を駆動するための線出力として構成されることができる。
【0065】
図12Aと12Bはこれらの図12Aと12Bに示されているページングシステムおよびページング受信機304で幾つかの他の無線リンクを単に置換することにより図11のオブジェクト探知システム11を構成できることが認識されよう。GPSディスプレイユニットで典型的であるように、そこに示されている街路および公道と共にマップが示されており、ディスプレイに含まれている表示は基地局350とオブジェクト探知機42のそれぞれの位置を示している。さらに前述したように、街路名、経度、緯度、方位又は距離を与える読出し陳述も表示された出力に含まれることができる。
【0066】
図12Aと12Bに示されている実施形態は例示であり本発明の概念および原理を示すものであり、本発明は特定の実施形態に限定されない。英数字テキスト、発話メッセージまたはマップ表示の形態の位置情報の出力は考慮されることができる任意の幾つかの構造で実行されることができる。さらに図12Aと12Bに示されているような幾つかの異なる出力構造を含み、ユーザがいずれの出力手段が所望であるかを選択することを可能にする設備も前述したシステムに組み込まれることができる。位置情報のある出力は選択された出力の代わり又はそれに加えて警報によって示されるか、その警報を伴うことができる。さらに、出力は例えばテキストフォーマットまたは発話フォーマットであるとき、与えられる情報はオブジェクト探知機42が使用されている領域の地理的マップ上に位置座標を手作業で描くことに使用されることができる。本発明のさらに別の実施形態では、GPS受信機により発生される座標データの処理は位置情報をオブジェクト探知機42から基地局18(図1参照)へ送信する前にオブジェクト探知機42の制御装置66(図4参照)により人間に読取り可能な形態に座標データを変換又は変更することを含むことができる。
【0067】
図13を参照すると、図10のフローチャートと図4のブロック図に示されているオブジェクト探知システム10に対する別の実施形態の動作のフローチャートの拡大部が示されている。図13はオブジェクト探知機42がオブジェクト探知システム10の機能を強化するためにオブジェクト探知システム10の動作に関する他の情報を位置座標情報に関連付けするように動作可能である2つのケースを示している。図13の例はバッテリ状態または境界に対するオブジェクト探知機の関係またはオブジェクト探知機42から基地局18へ送信されることができる位置座標情報を有するしきい値についての関連情報を示している。図13の検査により、フローはブロック404で開始しブロック412を通って継続し、これらのブロックはそれぞれ402の開始ブロックに続くフローチャート中の連続ブロックとして図10でも見られることが観察される。
【0068】
図13の参照を続けると、ブロック404で開始し、ここで図1の基地局18(または図8、9、12Aと12Bの基地局)はオブジェクト探知機42をページし、フローはブロック405へ進み、ここでオブジェクト探知機42は基地局18からページを受信する。基地局18からページを受信すると、決定ブロック407でオブジェクト探知機はその後バッテリ70の検査を実行し、GPSシステム50からの位置座標情報の捕捉へ進行するのに十分なバッテリ容量が存在するか否かを決定する。バッテリ検査により十分なバッテリ容量が存在することが示されたならば、フローは「Y」パスに沿って決定ブロック411へ進み、ここでオブジェクト探知機42はしきい値を超えたか否かを決定する第2の検査を行う。例えばオブジェクト探知機42は基地局18から送信されている信号の強度によって、または電子フェンスの境界の横断を示す信号の受信によって設定された予め定められた範囲内又はその範囲を超える可能性がある。決定ブロック411で行われた決定が肯定である場合、フローはオブジェクト探知機42のGPS受信機78をエネーブルするために「Y」パスに沿ってブロック412へ進む。それにおいてフローは図10に示されているようなフローチャートのステップに進む。
【0069】
図13の参照を続けると、しかしながら図13の決定ブロック407で行われるバッテリ検査が否であり、バッテリ70がGPSシステム50からの完全な位置座標情報の捕捉を行うのに十分な容量を持たないことを示したならば、フローは「N」パスに沿ってブロック409へ進み、ここでオブジェクト探知機42中の制御装置66(図4参照)はバッテリ70が十分な容量をもたないことを示すために低バッテリの警報バイトをフェッチする。この低バッテリ検査警報バイトはオブジェクト探知機42の送信機に与えられ、ブロック415に示されているように、オブジェクト探知機42はこの警報バイトを基地局18へ送信するように動作可能である。低バッテリ検査を示す警報バイトの送信に続いて、フローはブロック415からブロック417へ進み、ここでルーチンは終了する。オブジェクト探知機42がしきい値検査を行うブロック411へ戻り、決定ブロック411の検査の決定が否であるならば、フローは「N」パスに沿ってブロック413へ進み、ここでオブジェクト探知機42の制御装置66は「範囲外」の警報バイトをフェッチし、それを送信機へ送信してブロック415で警報バイトとして基地局18へ送信される。それにおいて、フローは先のようにブロック417へ進み、ルーチンは終了する。
【0070】
図14はカスタマ無線セル電話機インターフェース、カスタマウェブインターフェース、追跡サーバコンポーネントを含む本発明のオブジェクト探知システム11のバックエンドインフラストラクチャ500の別の実施形態を示している。特に図14はデジタルセルラ電話機ネットワーク520によって通信するためのセルラ電話機トランシーバが設けられている移動体オブジェクト探知機追跡装置42を含む通信バックエンドシステム500の1例を示している。好ましくは、セルラ通信システムは3Gであり、即ち毎秒128Kbpsから数メガビットの範囲の速度を有する高速度マルチメディアデータに適合する。知られているように、3Gシステムは地域的に欧州UMTS(ユニバーサル・モバイル・テレコミュニケーション・システム)、北米(CDMA2000)、日本(NTT DoXoMo)で実用されている。高度ローミング特性を有する3G型の無線ネットワークを介して、信号はどこへでも伝播でき、自動的に他の無線システム、例えばインハウス電話機システム、セルラ、衛星等へ自動的にハンドオフされることができる。代わりにまたはさらに、構成されたセルラ電話機ネットワークは一般的なキャリアにより通常動作されるタイプのこれらの無線の広域網(例えばWWAN)を具備し、これはAMPS(線真移動電話システム)、GSM(グローバル・システム・フォー・モバイル・コミュニケーションズ)、GPRS(汎用パケット無線サービス)、CDPD(セルラデジタルパケットデータ)、TDMA(時分割多重アクセス)、1×RTT(1×無線送信技術)、CDMA(符合分割多重アクセス)、EDGE、W−CDMA、GSM/UMTS(ユニバーサル・モバイル・テレコミュニケーション・システム)のようなオープンスタンダードを使用する。このようなデジタルセルラ電話ネットワークはVerizon、Sprint、Cingular、Syniverse等により提供されるものを含むことができる。カスタマが必要又は要望していない日常的な位置座標更新または他の監視情報を受信する追跡サーバ装置530が提供される。サーバ530は要求に応じてアクセスされることができる媒介の情報記憶装置として、および警報およびマップ情報の発生器として作用する。ウェブブラウザ装置550を介して、カスタマはインターネット99およびセルラ電話ネットワーク520を介してオブジェクト探知機へアクセス又は通信を開始することができ、オンラインで追跡サーバ530により受信された移動体探知機装置位置決定座標の実時間ダウンロードを受信できる。代わりに、カスタマのセルラ電話機540を介して、カスタマはセルラ電話ネットワーク520および追跡サーバ530を介してオブジェクト探知機へアクセスするか通信を開始でき、移動体探知機装置位置決定座標の「無線の」ダウンロードを実時間で受信する。通信はそれぞれのカスタマセルラ電話機540を通して開始されるユーザ開始位置問合せ551aを含むことができ、この問合せはセルラ電話ネットワーク520を介してパッケージングおよびフォーマットのため追跡サーバへ送られ、その後装置42で受信するためにセルラ電話ネットワーク520を介して通信されることが理解されよう。同様に、ユーザ開始位置問合せ551bはそれぞれのカスタマウェブブラウザ装置550を通して開始されることができ、この問合せはパッケージングおよびフォーマットのため追跡サーバへ送られ、その後装置42で受信するためにセルラ電話ネットワーク520を介して通信される。
【0071】
さらに別の実施形態では、本発明は3Gエネーブルされた移動体オブジェクト探知機と通信するためWLAN(無線構内網)によって動作するショートメッセージサービス(SMS)データサービスを実行できる。この動作はWLANに転送する前にユーザ開始位置問合せ制御又は類似の付勢メッセージをIPフォーマットへフォーマットすることを伴う。SMSメッセージの受信時に、移動体オブジェクト探知機はその位置座標を得るためにGPSまたは衛星追跡受信機を付勢する。
【0072】
ここで説明するように、追跡サーバからの応答552a、bはルーチンの位置更新、ユーザの問合せを誘導するための位置応答、オブジェクト探知機動作状態、送信された信号の強度、しきい値の超過、バッテリ状態、警報信号等を含むことができる。ユーザのウェブブラウザ装置を介する通信の場合、クライアント接続はSSL(セキュア・ソケット・層)接続を介してそれらのパーソナルコンピュータを使用して加入者により行われる。
【0073】
図15は本発明と共に使用されることのできるバックエンドインフラストラクチャ600のさらに別の実施形態を示している。このシナリオでは、基地局610は例えばGlobalPetFinder、エリコ、ニューヨーク州の追跡/監視サービスプロバイダを有し、これは例えば地理上のフェンス境界を設定するインフラストラクチャと、オブジェクト探知機の追跡サービスを提供し、種々のユーザの特定された装置およびモダリティの警報、例えばSMS、MMS、テキストメッセージ、インスタントメッセージ、eメール、ブラウザ警告等を発生するuLocate(商標名)サービス技術プラットフォーム615のような付加的なパーティサービスと提携している。
【0074】
uLocate(商標名)プラットフォームサービスに加えて、例えば現在の位置および追跡情報を移動体又は固定された装置加入者へ送信する方法としてセル電話ネットワークにより提供されるような任意の位置ベースサービス技術プラットフォームが一体化されることができることが理解される。例えばサービスプロバイダはオブジェクト探知機に組み込まれたGPS受信機チップから位置を得るか、代わりに(例えばGPS特徴のないオブジェクト探知機装置の)最も近いセル電話機タワーの信号強度に基づいた無線位置および三辺測量を使用して、LBSサービスウェブサービスへこの情報を送信することができ、これは適切なチャンネルを介して、例えば任意の無数の通信モダリティの1つを介するウェブサイト又は移動体インターフェースを介してカスタム情報を問合せする所有者の装置へ提供できる。特に図15に示されているように、バックエンドインフラストラクチャ600はさらに強化された無線ネットワークサービスプロバイダ620、例えばSyniverse Technologiesを含んでおり、GPSデータの通信と、移動体、固定された広域ネットワーク間の相互運用性を可能にするゲートウェイおよびデータ接続性を与える。例えば、インフラストラクチャ600では、オブジェクト探知機42は遠隔信号により又は内部で付勢されても、例えばプログラムされた地理上のフェンス境界を横切るとき、そのGPSデータ座標を獲得し、このデータを固定し、例えばSyniverse無線ネットワークサービスへ提供する。GPS位置データはゲートウェイを通して基地局監視サービスプロバイダのウェブサーバ610へ通信されることができる。付加的なパーティサービス、例えばuLocate(商標名)LBSプラットフォームサービスは位置の決定を行い、特定されたユーザ装置540へ返送する通信のための適切な応答メッセージをフォーマットする。例えば地理上のフェンス/ジオコード化サービスを提供するためのプラットフォームを介して、ユーザはそれらのウェブサイトを介して地理上のフェンス境界情報およびプログラム追跡モードを提供するようにエネーブルされる。動作において、プラットフォームは全ての地理上のフェンス情報を受信/処理し、移動体探知機装置のユーザ又はペットがプログラムされた地理上のフェンス境界を離れたときそれを決定する。uLocate(商標名)LBSの解決策はオブジェクト探知機の位置を識別し、潜在的に近くにあるものを発見し、他と位置を共有するために実行されることができる。マッピングAPI(アプリケーションプログラムインターフェース)抽出を提供することによって、uLocate(商標名)サービスは全ての移動体キャリアを横切って標準的なインターフェースを介してLBS警告メッセージングを可能にする、したがって、示されている実施形態では、警告メッセージはuLocate(商標名)サービスを介して発生され、無線通信613で例えばSyniverse Technologiesの無線ネットワーク620から直接的にユーザの移動体装置、例えばPDA、移動体コンピュータ装置、セル電話機へユーザへ転送される。代わりに又はさらに、警告メッセージが発生され、監視サービスのウェブサイト(例えば基地局へ)オンラインアクセスするユーザのウェブブラウザへ押し進められる。したがってuLocate(商標名)サービスはGPSデータを受信し、境界の超過を決定し、警告メッセージの生成を開始してユーザに関連する方法でオブジェクト探知機装置の地理位置についてユーザ又はペット所有者に通知する。したがってuLocate(商標名)の第3パーティサービス補助又は無線ネットワークを介して、オブジェクト探知機42の位置および潜在的な他の関連データ(マップ、ランドマーク、運転方向、追跡歴等)はそのユーザ装置上に表示されるようにサービスのウェブサイト610を介してユーザまたはペット所有者に通報されることができる。
【0075】
uLocate(商標名)プラットフォームサービスに加えて、例えば現在位置および追跡情報を移動体又は固定された装置の加入者へ送信する方法としてセル電話ネットワークにより提供されるような任意の位置ベースのサービス策は一体化されることができることが理解される。例えば、サービスプロバイダはオブジェクト探知機に組込まれたGPS受信機チップから位置を得るか、代わりに(例えばGPS特徴のないオブジェクト探知機装置の)最も近いセル電話機タワーの信号強度に基づいた無線位置および三角測量を使用して、LBSサービスウェブサービスへこの情報を送信することができ、これは適切なチャンネルを介して、例えば任意の無数の通信モダリティの1つを介するウェブサイト又は移動体インターフェースを介して問合せする所有者の装置へカスタム情報を提供できる。
【0076】
図16は基地局を介してアクセス可能な種々の特徴を示しているユーザ装置の1例のウェブインターフェースディスプレイ700を示している。図16に示されているように、加入しているユーザ装置のインターフェースは所有者のペットまたは追跡されるオブジェクトの名称715と、最後に知られた住所および時間スタンプ711を含む追跡されているペット又は人の最後に知られた位置を示すマップ710と、加入者が追跡構造を設定することを可能にする装置管理特徴720と、オブジェクト探知機の電源の残量を示すバッテリ状態インジケータ725と、オブジェクト探知機装置と関連される現在の温度読み取りの指示730と、歩行モードまたは追跡モード機能のユーザプログラミングをエネーブルするモード設定ボタン740と、任意の警報、例えばフェンス外警報、バッテリ警報、移動体装置又はその周辺環境の温度があるしきい値を超えるかそれより低下する時に発生する温度警報がオブジェクト位置で発生されているかを示す警報状態インジケータ750とを含んでいる。
【0077】
ユーザがインターフェース700を介して装置の管理特徴720を選択するときに加入者によりアクセス可能な装置の管理機能の例示が図16に示されており、さらに別のディスプレイ775が図17に示されているように発生され、これによって加入者は追跡/地理上のフェンス監視および警報構造をそれらの固定された又は移動体ウェブブラウザ装置を介して設定することが可能になる。図17に示されているように、ユーザには第1の列780に追跡されるペット又は人の名称が提示され、対応する列782にオブジェクト探知機装置用にプログラムされた現在の地理上のフェンス境界が提示され、対応する列784に警報通知を受けるように指定された連絡先が提示される。図17に示されているように、加入者のアカウントに関連される多数のペットが存在し、さらに追跡されたペット位置情報を転送する多数の方法が存在することが理解される。
【0078】
特定のペットに対しては、ユーザは図17に示されているように、そのペットの構造リンク785、例えば“Hank”を選択することにより警報設定をプログラムできる。構造リンク785を選択した時、さらに別のスクリーンディスプレイ789が発生され、図18に示されている警報の設定の機能を与える。例えば図18に示されているように、温度状態の警報設定は例えば上限温度790a、下限温度790bを設定できる。さらに、ユーザは迷子のペットまたは人の位置を決定するための情報を与える好ましい方法を示すことができる。例えばフィールド792に示されているように、ユーザは緯度又は経度座標で報告を示すか、又は特定のアドレス或いは距離および方向報告モードで報告を示すことができる。インターフェース中に示されているエントリフィールド795は動作の監視モード、例えば基本モードを設定し、そこではユーザは迷子のペットまたは人の位置座標を得るために加入者のセル電話機で予め定められた番号をダイヤルすることによって位置を非同期的に要求できる。代わりに、ユーザは動作の「フェンス」モードを設定でき、加入者が仮想的に任意のサイズの地理上のフェンスを設定して追跡機能を開始することを可能にし、それによって加入者は彼らのペットがフェンス境界を出るとすぐに警告されることができる。さらに別のリンク786が図17に示され、それは選択されるときユーザがペット用にプログラムされた地理上のフェンスを編集し、半径を変更または加入者の連絡情報を編集することを可能にする。1つのリンク787は特にバックエンドシステムが加入者を彼らのペットへ誘導できる基準点として1位置を設定することを可能にする追跡点の特定に専用とされる。1実施形態では、オブジェクト探知システムは最初に加入者を誘導するためのアドレスを発見しようとし、それができないならば、加入者は特定された追跡点から距離および方向の形態でペットの位置を受信する。例えばユーザがユーザの家の正面に追跡点を設定し、その加入者のペットが所在地住所のないブロックに逃げ込んだならば、加入者は例えば「Fidoが離れ、家から50フィート西にいる」というフォーマットで警告を受け、ここでの「家」は加入者が追跡点に割当てた名称である。
【0079】
特に、図19に示されている装置の管理スクリーンインターフェース789を介して、加入者にはバックエンドシステムの基地局に記憶されているペットについての現在のフェンス割当て情報803が与えられる。加入者は示されている加入者のペットについてのフェンス境界の絵地図807の生成および表示を行うプレビューボタン806を選択できる。代わりにまたはさらに、加入者はフェンスの作成時に先に特定されたようにフェンス810の名称(“Jenの家?”)を選択し、例えばペット“Hank”へ割当てるためにはペットに対する“Assign Fence”ボタン813を選択することにより、ペットの任意の先に構成されたフェンスを割当てることができる。プレビューボタン816の選択はその割当てられたフェンス(“Jenの家?”)(図示せず)の絵地図の表示の観察を可能にする。
【0080】
さらに、図19に示されているスクリーンインターフェース789を介して、加入者には示されたペット、例えばペット“Hank”について新しいフェンスを作成するためのリンク820が与えられる。即ち、選択リンク820に応答してインターフェースディスプレイ850は図20Aに示されているように提示され、ユーザがフェンス境界を特定することを可能にする。エントリフィールド853はユーザがフェンスで囲まれた領域の原点を特定することを可能にし、特定のフェンス境界の名称付け(例えばSimpsonの家)をするためのエントリフィールド854を含んでいる。エントリフィールド855は示されたアドレスを有する原点を囲んでいるフェンス境界の半径に加入者が入ることを可能にする。図20Bに示されているように、フェンスを作成するために原点(アドレス)と半径(地理上のフェンス境界)を含む情報846の入力後、ディスプレイ上のアイコンにより表される原点アドレス849を囲む地理上のフェンス境界847を示すプレビュー845が表示される。1実施形態では、ユーザがフェンスを作成するためにアドレスを入力するならば、バックエンドシステムは家の中心を直接街路上に置き、加入者の家は実際には街路から奥まっているか地所のより後方向に位置される可能性がある。システムは図20Bに提示されているユーザインターフェースを介して加入者が調節を行うことを可能にする。例えば図20Bに示されているように、ユーザは加入者がフェンスの新しい中心にしようとしている位置、例えば位置839をクリックすることによりプレビュースクリーン845内でフェンスを動かすことができる。即ち、システムがフェンスのプレビューを表示した後、ユーザはフェンスの位置を中央化し直すためにマップ上のあらゆる所をクリックするようにカーソルを操作することができる。これが行われると、図20Bのプレビューを介して入力された位置に対応して図20Cに示されているプレビューディスプレイ845’に示されている新しい位置839'の原点のプレビューを有する新しい位置の原点でフェンスが作成される。このプロセスは加入者が入力したがっていること以外の事へ実際のアドレスを変更することができる。しかしながら計算された新しいアドレスが、設定されたフェンスの適切なアドレスであると衛星が理解しているアドレスであるとき、この変更は無視される。
【0081】
加入者により作成される各新しいフェンスは加入者のペットに関連付けするために記憶されることが理解される。
【0082】
再び図17を参照すると、装置管理スクリーンインターフェース789を介して、加入者は警報の送信を受ける連絡先と警報のメッセージングモダリティ、例えばSMS、eメール忠告等を特定している連絡情報を割当てることができる。“Assign Contacts”ボタン797の選択により、ディスプレイはペット(または人)についての連絡方法の割当てを可能にする加入者に提示される。図21は警報メッセージを受信するために加入者が連絡を割当てることができる1例のディスプレイ860を示している。図21に示されているように、加入者が作成した連絡リストを加入者がスクロールして、付加ボタン866の選択により1以上の連絡先を選択することを可能にする第1のドロップダウンリスト865が与えられる。さらに、図21に示されているスクリーンインターフェース860を介して、加入者に対して示されたペット、例えばペット“Hank”についての新しい連絡先を作成するためのリンク670が与えられる。即ち、選択リンク870に応答して、インターフェースディスプレイ880は図22に示されているように提示され、これはユーザが連絡先を特定することを可能にする。インターフェースディスプレイ880を介して、ユーザはエントリフィールド885を介して連絡先名を入力し、エントリフィールド887を介して連絡を受けるための好ましい通信モード、例えばセル電話機またはeメールを特定でき、さらにeメール連絡モードが特定されたならば、新しい連絡先のeメールアドレスの特定を可能にする。1実施形態では、連絡は連絡受け装置として特定されたセル電話機がSMSテキストメッセージング能力を含むことを確実にしなければならない。
【0083】
本発明のさらに別の実施形態では、図14および15に示されているように、バックエンドインフラストラクチャは加入者のペットの健康記録を追跡し、監視し、維持することができる獣医との随意選択的なインターフェースを有することができる。したがって、バックエンドシステムは獣医からその特定のペットが例えば「注射」または歯の検査を必要とすることについてのデータの供給580を受ける。このような通知をデータ供給580の受取りに応答して、バックエンドシステムは加入者のペットが特定のタイプの医療注射および/または良好な健康状態の維持を確実にするために獣医に通院する必要があるという警報を加入者へ発生することができる。例えば加入者はペットが注射を必要とする通知を受信でき、eメールまたはIMメッセージが迅速に発生され、その連絡装置を介して指定された連絡先へ発送される。獣医情報を図14と15に示されている方法でバックエンドシステムへ統合することにより、加入者は彼らのペットの健康に関する臨界的情報を受信できることが確実にされる。さらにこの実施形態に対して、ペットの医療記録がオブジェクト探知機装置のメモリに記憶され表示可能である。したがってペットが非所有者により発見されたならば、少なくともその発見されたペットに関する重要な医療データが検索されることができる。
【0084】
好ましい実施形態を詳細に説明したが、種々の変形、置換、変更が請求項により規定されている本発明の技術的範囲を逸脱せずに行われることができることが理解されるべきである。
【特許請求の範囲】
【請求項1】
人に結合された装置で位置情報を無線で受信し、
位置情報を決定するために位置信号を処理するように装置の少なくとも一部を付勢し、
位置情報の決定後、移動体装置の一部を自動的に消勢し、
人に関連される位置しきい値を識別し、
位置情報に少なくとも部分的に基づいて位置しきい値の侵害を決定するステップを含み、その侵害は人に結合された装置により決定される方法。
【請求項2】
人に関連される位置しきい値を記憶するように動作可能なメモリと1以上のプロセッサとを具備し、
1以上のプロセッサは、
位置信号を無線で受信し、
位置情報を決定するために位置信号を処理するように装置の少なくとも一部を付勢し、
位置情報の決定後、移動体装置の一部を自動的に消勢し、
人に関連される位置しきい値を識別し、
位置情報に少なくとも部分的に基づいて位置しきい値の侵害を決定するように動作可能であり、人に結合されるように動作可能であるシステム。
【請求項3】
無線通信ネットワークおよび基地局を含むシステム中で動作可能であり、人の位置を決定または追跡をするための移動体通信ユニットにおいて、
時間において選択したインターバルで与えられる付勢信号に応答して衛星ナビゲーションシステムからデータ送信を受信するように動作可能な受信機と、
処理された位置データを前記無線通信ネットワークを介して前記基地局のユーザへ送信するように動作可能な送信機と、
前記受信機と、前記受信機を制御するための前記付勢信号を与えるように動作可能な前記送信機とに結合されて動作し、前記衛星ナビゲーションシステムから受信された前記データ送信を処理し前記処理された位置データを前記送信機へ結合して前記送信手段から前記基地局の前記ユーザへ処理された位置データを送信するように動作可能な制御装置とを具備し、前記移動体通信ユニットは前記人により携帯されるように構成されている移動体通信ユニット。
【請求項4】
人の位置についての情報を基地局のユーザに提供する方法において、
人により携帯され基地局との無線通信ネットワークを介して通信する衛星ナビゲーション受信機および送信機と結合されている移動体制御装置は、
衛星ナビゲーションシステムの衛星送信から位置情報を捕捉するために予め定められた時間に移動体制御装置で発生される付勢信号に応答して衛星ナビゲーション受信機を付勢し、
衛星ナビゲーション受信機から前記制御装置へ出力された位置情報を処理して、処理された位置情報を送信機へ結合し、
処理された位置情報を無線通信ネットワークを介して送信機から基地局へ送信し、制御装置を携帯する人の位置についての情報を通信するステップにしたがって衛星ナビゲーション受信機から位置情報を得るように動作可能である方法。
【請求項5】
受信機エネーブル入力および1つの出力を有し、前記出力から位置データを提供するために時間において選択した間隔で付勢するときに衛星ナビゲーションシステムから送信を受信するため第1のアンテナに結合されている衛星ナビゲーション受信機と、
送信エネーブル入力および1つのデータ入力を有し、前記位置データが前記データ入力で与えられるとき基地局へ通信するため第2のアンテナに結合される送信機と、
衛星ナビゲーションシステム受信機を付勢するために時間において選択した間隔で付勢信号を発生し、前記位置データを処理して、時間において選択した間隔で前記基地局への提案された位置データの通信を制御し、前記衛星ナビゲーションシステム受信機の前記出力に応答している位置データ入力と、前記処理された位置データを前記送信機の前記データ入力に提供するための送信データ出力と、受信機エネーブル信号を前記受信機の前記受信機エネーブル入力へ結合するための受信機エネーブル出力と、送信信号を前記送信機の前記送信エネーブル入力に結合するための送信エネーブル出力とを有する制御装置と、
前記人上で前記MCUを支持するキャリアとを具備している人の位置決めまたは追跡のための移動体通信ユニット(MCU)。
【請求項6】
無線通信ネットワークと基地局とを含んでいるシステムで動作可能である人の位置決め又は追跡のための移動体通信ユニット(MCU)において、
時間において選択した間隔で与えられる付勢信号に応答した衛星ナビゲーションシステムからのデータ送信を受信するための衛星受信手段と、処理された位置データを前記無線通信ネットワークを介して前記基地局のユーザへ送信するための送信手段と、
前記衛星受信手段と前記送信手段とに結合されて動作し、前記付勢信号を提供して衛星受信手段を制御する制御手段と、
前記衛星ナビゲーションシステムから受信された前記データ送信を処理し、前記処理された位置データを前記送信手段へ結合して、前記送信手段からの前期処理された位置データを前記基地局の前記ユーザへ通信し、
前記基地局からの送信を前記無線通信ネットワークを介して受信するための前記移動体通信ユニット中の第2の受信手段とを具備し、前記移動体通信ユニットは前記人により携帯されるように構成されている移動体通信ユニット。
【請求項7】
人に結合された少なくとも1つのアンテナを有する移動体通信装置を人に取付け、
移動体通信ユニットの位置座標を得るために移動体通信ユニットにおいてGPSシステムの送信をアクセスし、
無線リンクを介して移動体通信ユニットから移動体基地局へ位置座標を通信し、
基地局の位置座標を決定し、
移動体通信ユニットの受信された位置座標と移動体局の決定された座標から、移動体通信ユニットに対する移動体基地局の相対位置を決定するステップを含んでいる人の位置決め又は追跡のための方法。
【請求項8】
移動体通信ユニットの位置座標を得るため移動体通信ユニットでGPSシステムの送信を受信し、移動体通信ユニットは人に結合されている少なくとも1つのアンテナを有し、
無線リンクを介して移動体通信ユニットから位置座標を移動体基地局へ通信し、
移動体基地局の位置座標を決定し、
移動体通信ユニットの受信された位置座標と移動体局の決定された座標から、移動体通信ユニットに対する移動体基地局の相対位置を決定するステップを含んでいる人の位置決め又は追跡のための方法。
【請求項1】
人に結合された装置で位置情報を無線で受信し、
位置情報を決定するために位置信号を処理するように装置の少なくとも一部を付勢し、
位置情報の決定後、移動体装置の一部を自動的に消勢し、
人に関連される位置しきい値を識別し、
位置情報に少なくとも部分的に基づいて位置しきい値の侵害を決定するステップを含み、その侵害は人に結合された装置により決定される方法。
【請求項2】
人に関連される位置しきい値を記憶するように動作可能なメモリと1以上のプロセッサとを具備し、
1以上のプロセッサは、
位置信号を無線で受信し、
位置情報を決定するために位置信号を処理するように装置の少なくとも一部を付勢し、
位置情報の決定後、移動体装置の一部を自動的に消勢し、
人に関連される位置しきい値を識別し、
位置情報に少なくとも部分的に基づいて位置しきい値の侵害を決定するように動作可能であり、人に結合されるように動作可能であるシステム。
【請求項3】
無線通信ネットワークおよび基地局を含むシステム中で動作可能であり、人の位置を決定または追跡をするための移動体通信ユニットにおいて、
時間において選択したインターバルで与えられる付勢信号に応答して衛星ナビゲーションシステムからデータ送信を受信するように動作可能な受信機と、
処理された位置データを前記無線通信ネットワークを介して前記基地局のユーザへ送信するように動作可能な送信機と、
前記受信機と、前記受信機を制御するための前記付勢信号を与えるように動作可能な前記送信機とに結合されて動作し、前記衛星ナビゲーションシステムから受信された前記データ送信を処理し前記処理された位置データを前記送信機へ結合して前記送信手段から前記基地局の前記ユーザへ処理された位置データを送信するように動作可能な制御装置とを具備し、前記移動体通信ユニットは前記人により携帯されるように構成されている移動体通信ユニット。
【請求項4】
人の位置についての情報を基地局のユーザに提供する方法において、
人により携帯され基地局との無線通信ネットワークを介して通信する衛星ナビゲーション受信機および送信機と結合されている移動体制御装置は、
衛星ナビゲーションシステムの衛星送信から位置情報を捕捉するために予め定められた時間に移動体制御装置で発生される付勢信号に応答して衛星ナビゲーション受信機を付勢し、
衛星ナビゲーション受信機から前記制御装置へ出力された位置情報を処理して、処理された位置情報を送信機へ結合し、
処理された位置情報を無線通信ネットワークを介して送信機から基地局へ送信し、制御装置を携帯する人の位置についての情報を通信するステップにしたがって衛星ナビゲーション受信機から位置情報を得るように動作可能である方法。
【請求項5】
受信機エネーブル入力および1つの出力を有し、前記出力から位置データを提供するために時間において選択した間隔で付勢するときに衛星ナビゲーションシステムから送信を受信するため第1のアンテナに結合されている衛星ナビゲーション受信機と、
送信エネーブル入力および1つのデータ入力を有し、前記位置データが前記データ入力で与えられるとき基地局へ通信するため第2のアンテナに結合される送信機と、
衛星ナビゲーションシステム受信機を付勢するために時間において選択した間隔で付勢信号を発生し、前記位置データを処理して、時間において選択した間隔で前記基地局への提案された位置データの通信を制御し、前記衛星ナビゲーションシステム受信機の前記出力に応答している位置データ入力と、前記処理された位置データを前記送信機の前記データ入力に提供するための送信データ出力と、受信機エネーブル信号を前記受信機の前記受信機エネーブル入力へ結合するための受信機エネーブル出力と、送信信号を前記送信機の前記送信エネーブル入力に結合するための送信エネーブル出力とを有する制御装置と、
前記人上で前記MCUを支持するキャリアとを具備している人の位置決めまたは追跡のための移動体通信ユニット(MCU)。
【請求項6】
無線通信ネットワークと基地局とを含んでいるシステムで動作可能である人の位置決め又は追跡のための移動体通信ユニット(MCU)において、
時間において選択した間隔で与えられる付勢信号に応答した衛星ナビゲーションシステムからのデータ送信を受信するための衛星受信手段と、処理された位置データを前記無線通信ネットワークを介して前記基地局のユーザへ送信するための送信手段と、
前記衛星受信手段と前記送信手段とに結合されて動作し、前記付勢信号を提供して衛星受信手段を制御する制御手段と、
前記衛星ナビゲーションシステムから受信された前記データ送信を処理し、前記処理された位置データを前記送信手段へ結合して、前記送信手段からの前期処理された位置データを前記基地局の前記ユーザへ通信し、
前記基地局からの送信を前記無線通信ネットワークを介して受信するための前記移動体通信ユニット中の第2の受信手段とを具備し、前記移動体通信ユニットは前記人により携帯されるように構成されている移動体通信ユニット。
【請求項7】
人に結合された少なくとも1つのアンテナを有する移動体通信装置を人に取付け、
移動体通信ユニットの位置座標を得るために移動体通信ユニットにおいてGPSシステムの送信をアクセスし、
無線リンクを介して移動体通信ユニットから移動体基地局へ位置座標を通信し、
基地局の位置座標を決定し、
移動体通信ユニットの受信された位置座標と移動体局の決定された座標から、移動体通信ユニットに対する移動体基地局の相対位置を決定するステップを含んでいる人の位置決め又は追跡のための方法。
【請求項8】
移動体通信ユニットの位置座標を得るため移動体通信ユニットでGPSシステムの送信を受信し、移動体通信ユニットは人に結合されている少なくとも1つのアンテナを有し、
無線リンクを介して移動体通信ユニットから位置座標を移動体基地局へ通信し、
移動体基地局の位置座標を決定し、
移動体通信ユニットの受信された位置座標と移動体局の決定された座標から、移動体通信ユニットに対する移動体基地局の相対位置を決定するステップを含んでいる人の位置決め又は追跡のための方法。
【図1】


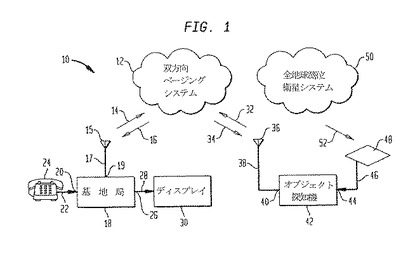
【図2】
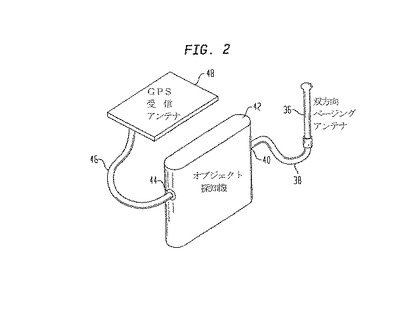
【図3A】
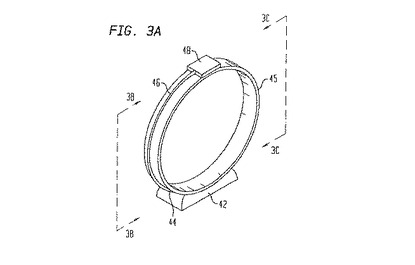
【図3B】
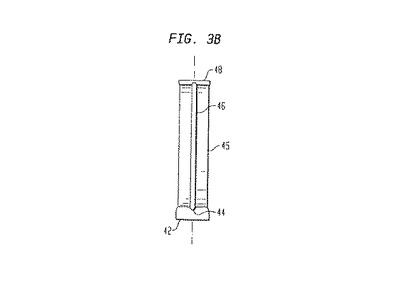
【図3C】
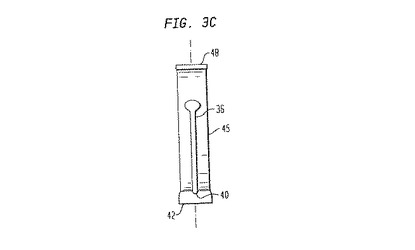
【図4】
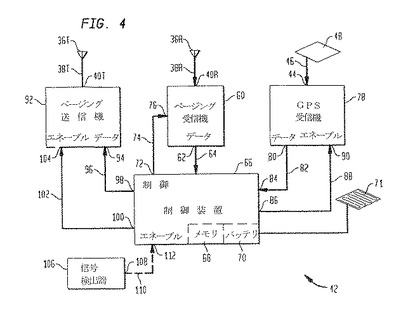
【図5】
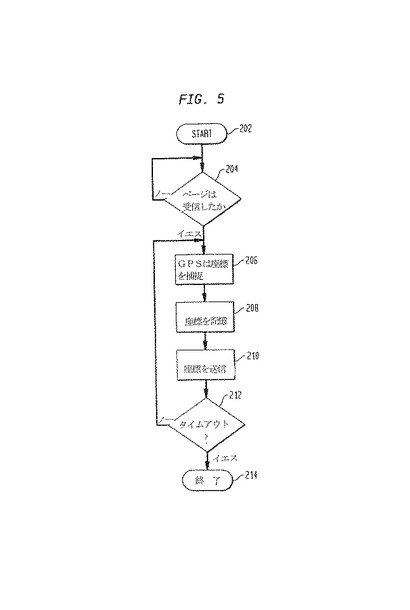
【図6】
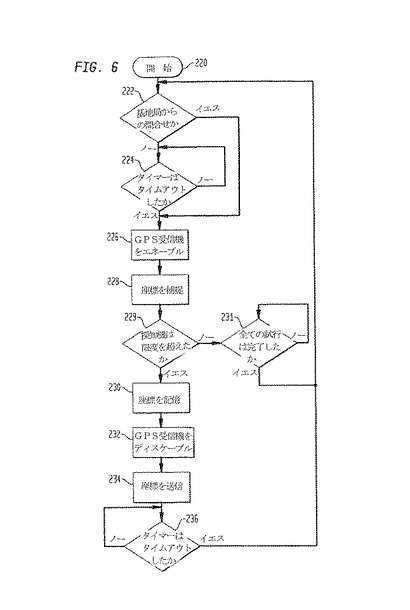
【図7】
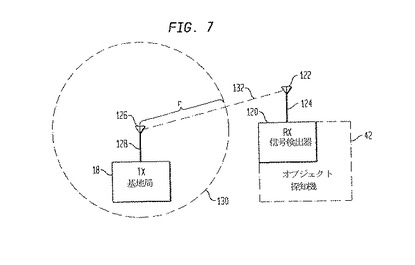
【図8】
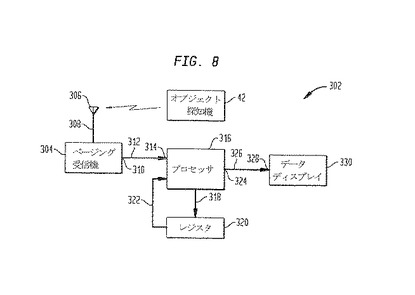
【図9】
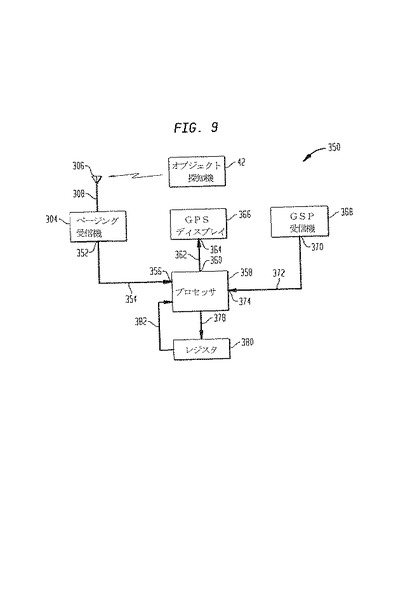
【図10】
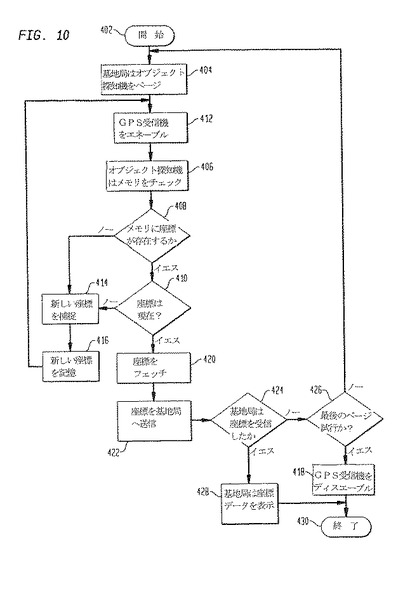
【図11】
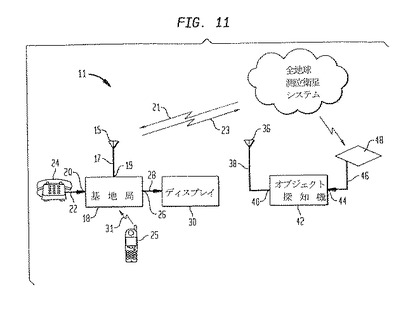
【図12A】
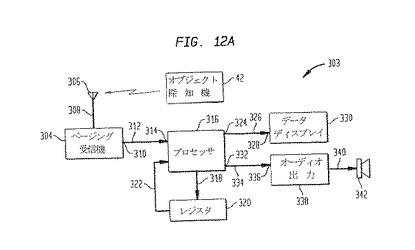
【図12B】
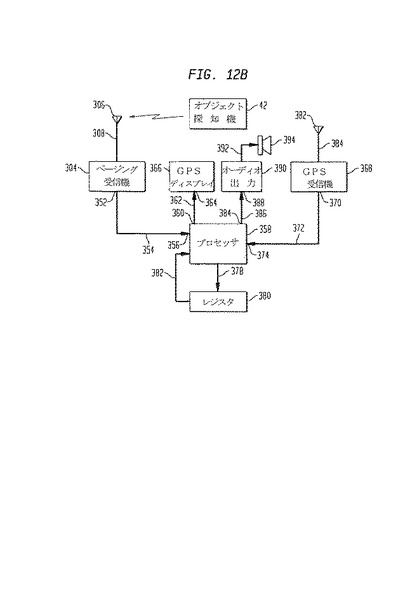
【図13】
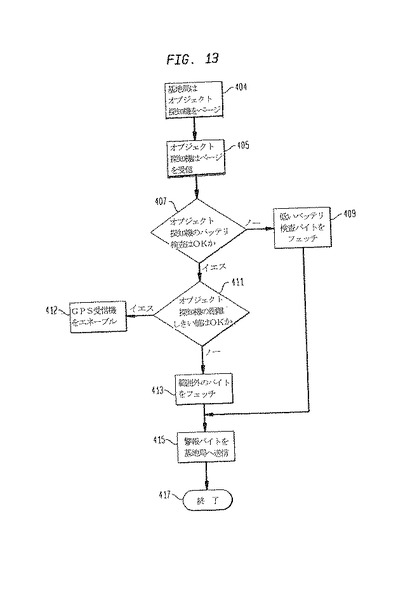
【図14】
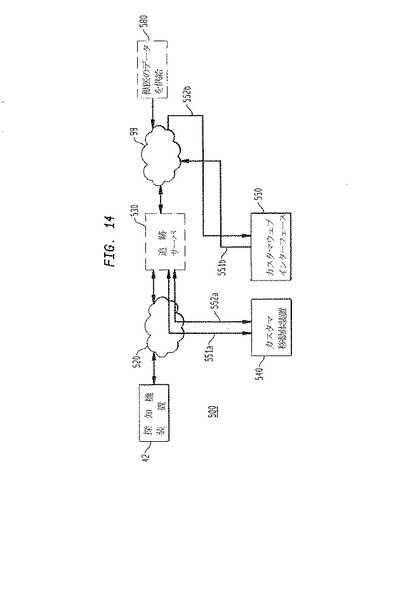
【図15】
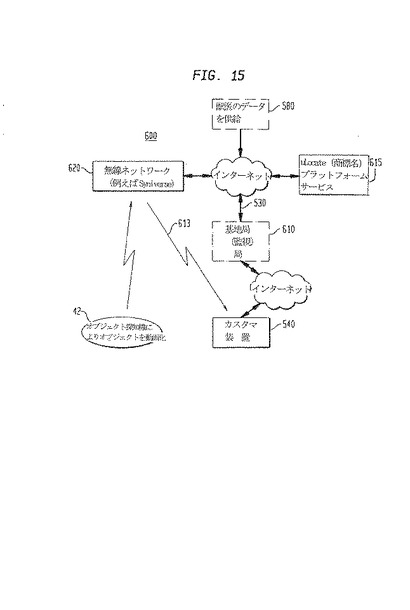
【図16】
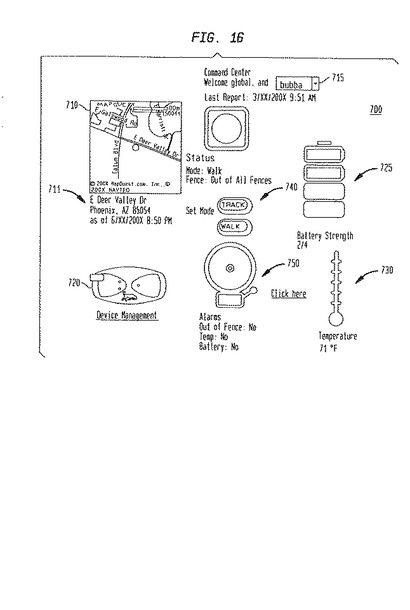
【図17】
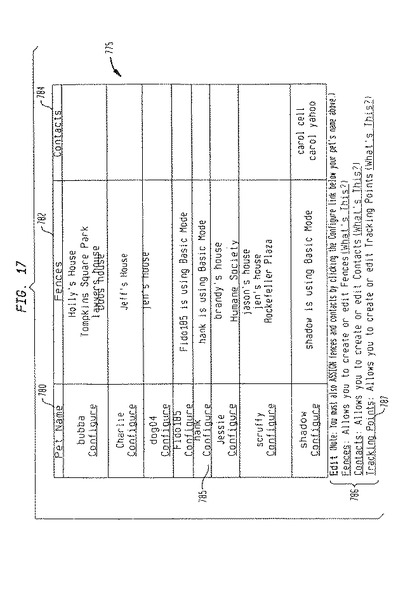
【図18】
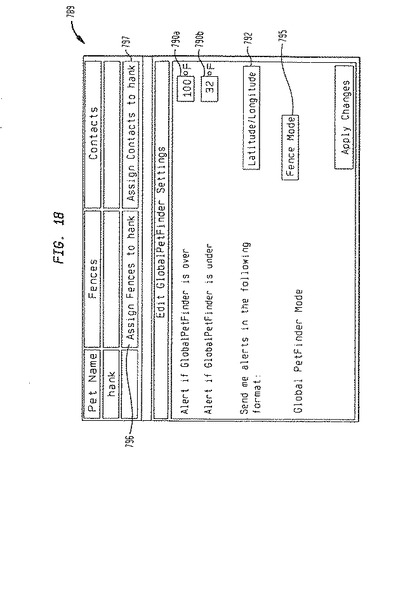
【図19】
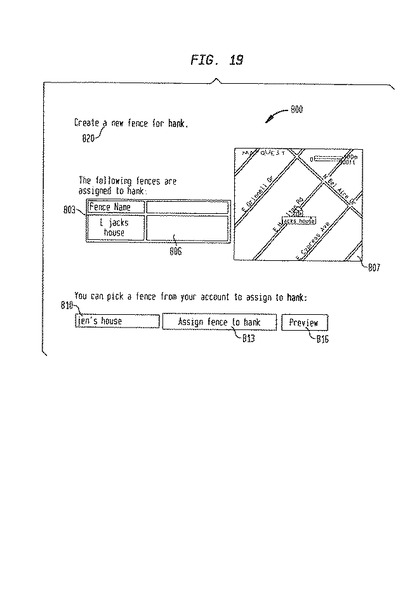
【図20A】
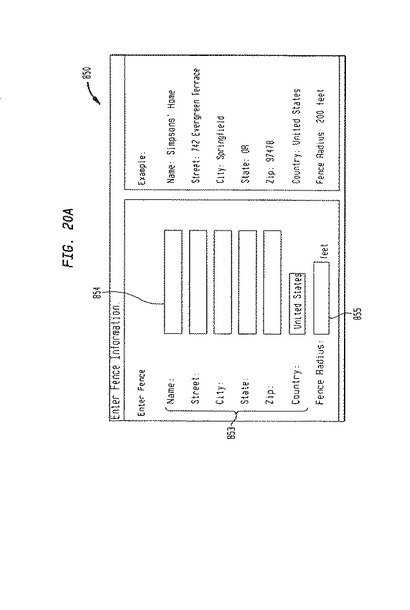
【図20B】
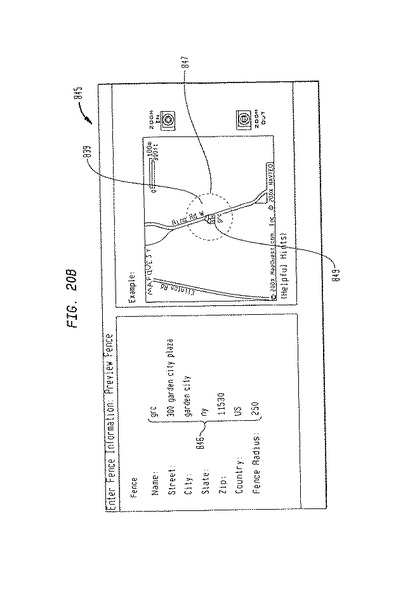
【図20C】
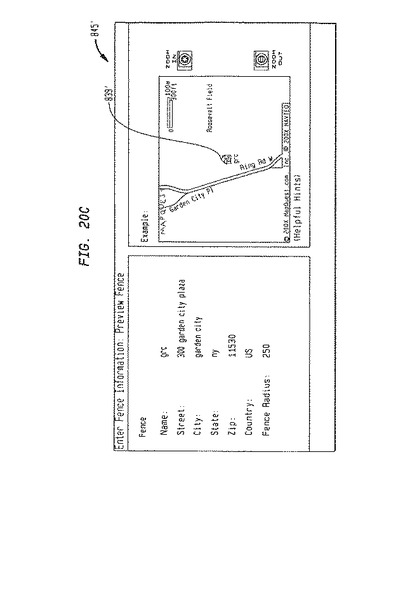
【図21】
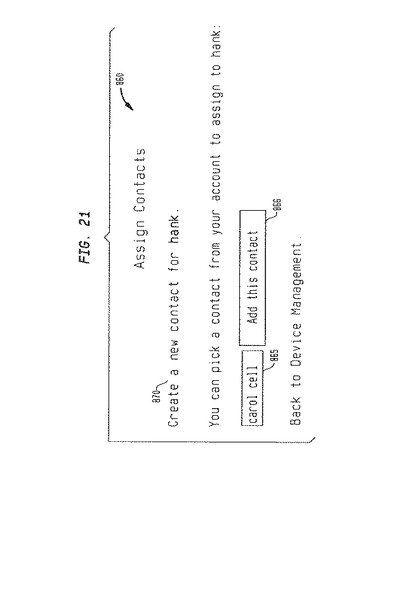
【図22】
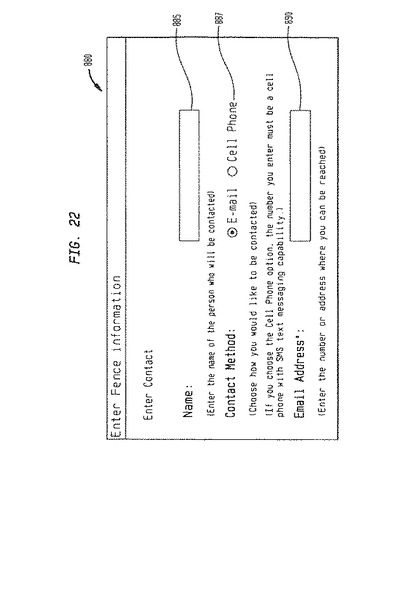
【図2】
【図3A】
【図3B】
【図3C】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12A】
【図12B】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20A】
【図20B】
【図20C】
【図21】
【図22】
【公表番号】特表2010−529520(P2010−529520A)
【公表日】平成22年8月26日(2010.8.26)
【国際特許分類】
【出願番号】特願2010−506247(P2010−506247)
【出願日】平成20年4月23日(2008.4.23)
【国際出願番号】PCT/US2008/005240
【国際公開番号】WO2008/133912
【国際公開日】平成20年11月6日(2008.11.6)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.GSM
【出願人】(593141953)ファイザー・インク (302)
【Fターム(参考)】
【公表日】平成22年8月26日(2010.8.26)
【国際特許分類】
【出願日】平成20年4月23日(2008.4.23)
【国際出願番号】PCT/US2008/005240
【国際公開番号】WO2008/133912
【国際公開日】平成20年11月6日(2008.11.6)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.GSM
【出願人】(593141953)ファイザー・インク (302)
【Fターム(参考)】
[ Back to top ]