
振動センサー式リアルタイムGPSロガーシステム
【課題】本願発明は、リアルタイムGPSシステムにおいて必要最小限且つ高密度のGPS位置情報をより確実に発信できることに関する。
【解決手段】本願発明に従ったリアルタイムGPSシステムは、従来システムが無線サービスエリアで発信間隔ごと一箇所の位置情報しか送信しないことに対し、GPSロガーに蓄積した複数ポイントの位置情報を一定の間隔で発信する。GPSロガーにある位置情報データは振動センサーにより、動いていない時には記録しないように制御する。本発明により、最短1秒間隔の位置情報データをリアルタイムで送信できるようになり、電波が届かない場所においても、位置情報を記録し続け、電波回復時再度送信が可能となる。また動いていない時には無駄な位置情報を無くすることにより、通信量及び電池消耗も減る。これにより、経済的に通信費が節約できる、利用できる時間も大幅に延長できる。
【解決手段】本願発明に従ったリアルタイムGPSシステムは、従来システムが無線サービスエリアで発信間隔ごと一箇所の位置情報しか送信しないことに対し、GPSロガーに蓄積した複数ポイントの位置情報を一定の間隔で発信する。GPSロガーにある位置情報データは振動センサーにより、動いていない時には記録しないように制御する。本発明により、最短1秒間隔の位置情報データをリアルタイムで送信できるようになり、電波が届かない場所においても、位置情報を記録し続け、電波回復時再度送信が可能となる。また動いていない時には無駄な位置情報を無くすることにより、通信量及び電池消耗も減る。これにより、経済的に通信費が節約できる、利用できる時間も大幅に延長できる。
【発明の詳細な説明】
【技術分野】
【0001】
リアルタイムGPSシステムにおいて、必要最小限且つ高密度の位置情報をより確実に発信できることに関する物である。
【背景技術】
【0002】
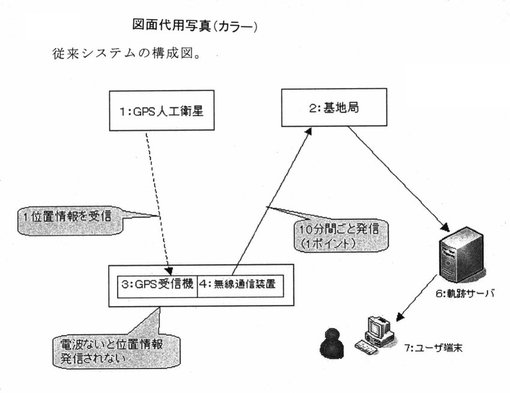
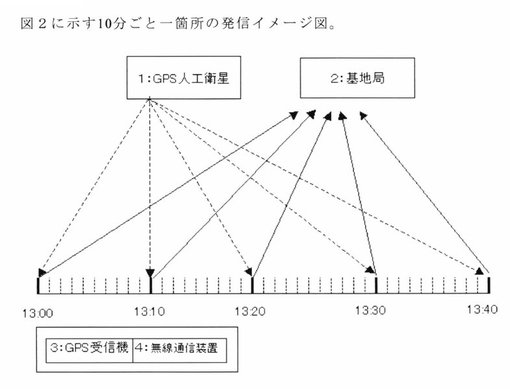
従来のリアルタイム位置情報発信システムは無線サービスエリア内に於いて発信間隔ごと、図3、図5に示すように一箇所のGPS位置情報を取得し、送信することである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−339757公報
【発明が解決しようとする課題】
【0004】
しかしながら、以上のシステムによれば、無線サービスエリアにおいて発信間隔ごとに1件の位置情報しか発信できない。3分間隔以下の発信は通信システム上制限され、また発信間隔を短くすると端末からの送信回数が増え、電池の消耗が激しくなり、利用動作時間が短い。また無線サービスエリア以外のところでは、位置情報が発信できなくなり、履歴が取れない。従来システムの端末は夜寝ている時も(動いていない時にも)、同じ場所の位置情報を発信し続ける為に電池消耗が激しくまた通信費も高騰となる。
本発明は、必要最小限且つ高密度のGPS位置情報をより効率良く、確実に発信できることを課題とする。また、GPS衛星信号が受信出来ないエリアでも、おおよその位置情報が把握できることを課題とする。
【課題を解決するための手段】
【0005】
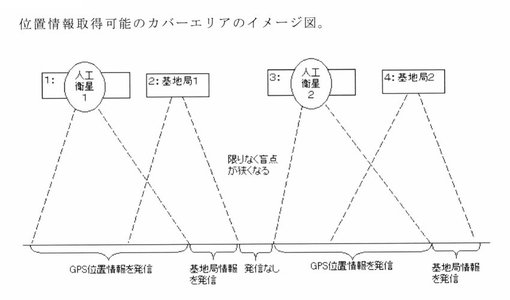
以上の課題を解決するために、本発明は振動センサーとGPSロガーと無線モジュールを有機的に結合することにより省電流、省無線回線運用コストを実現するリアルタイム位置情報発信システムである。また、GPS衛星信号が受信出来ないエリアで、基地局情報を元に位置情報を提供することで、限りなく監視盲点を狭くするシステムである。
【発明の効果】
【0006】
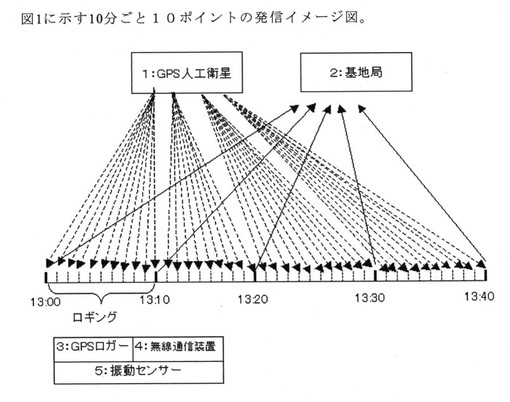
本発明によれば、GPSロガーと無線モジュールと結合したことで、図4示すように1分間隔(GPSロガー最短記録間隔は1秒間隔)の位置情報を蓄積し、一定間隔で発信することが可能となる。
【0007】
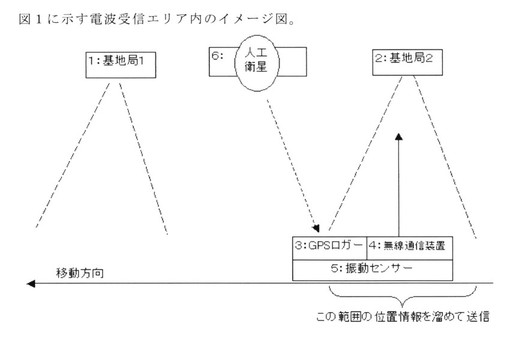
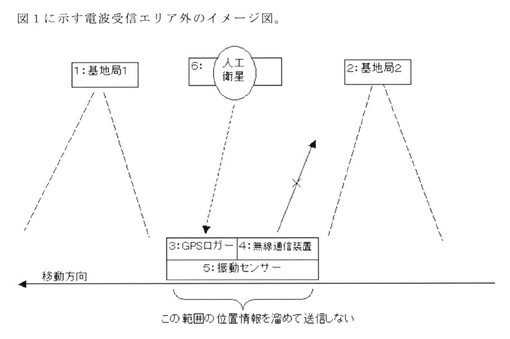
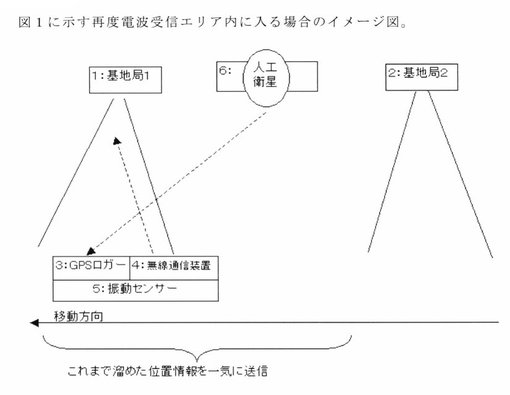
図6、図7、図8示すように、無線サービスエリア外でもGPSロガーに、位置情報が蓄積され、無線サービスエリアに入った時に蓄積データを発信される為に時間差のない動態管理システムが確立できる。
【0008】
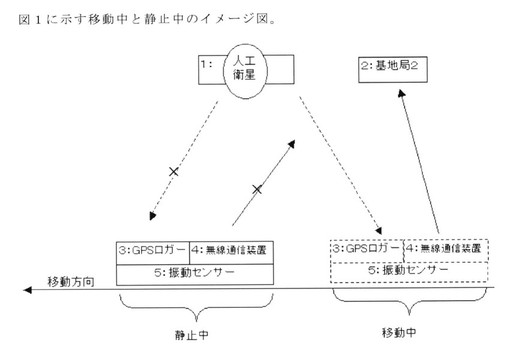
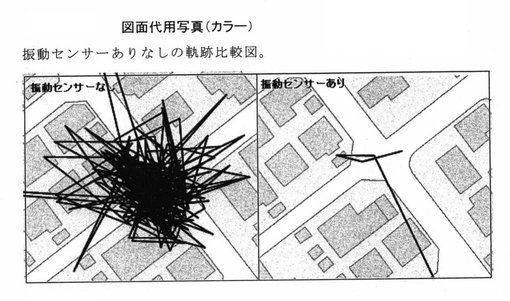
図9示すように、振動センサー制御により、動いていない時には無駄な情報がGPSロガーに蓄積されなくなる。通信モジュールも休眠モードに入り、発信しなくなる。それにより、通信量及び電池消耗が節約でき、通信費が減り、利用可能時間が長くなる。図11示すように軌跡がすっきりとなる。
【0009】
図9示すように、GPS衛星信号が受信出来ないエリアで、基地局情報を元に位置情報を提供することができる。
【発明を実施するための最良の形態】
【0010】
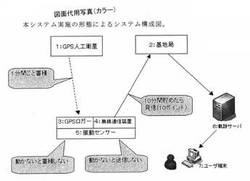
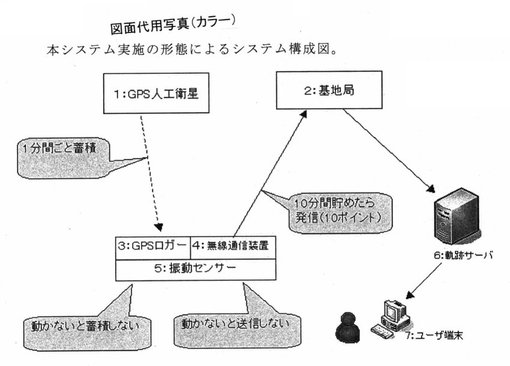
以下、本発明による振動センサー式リアルタイムGPSロガーシステムの実施の形態を図1に示す。GPSロガー(図1の3)がGPS人工衛星(図1の1)から1分ごとの位置情報をロギングする。発信間隔10分間が経ったら、無線通信装置(図1の4)を通して、10ポイントの位置情報を発信する。基地局(図1の2)を経由し、軌跡サーバー(図1の6)に伝送される。
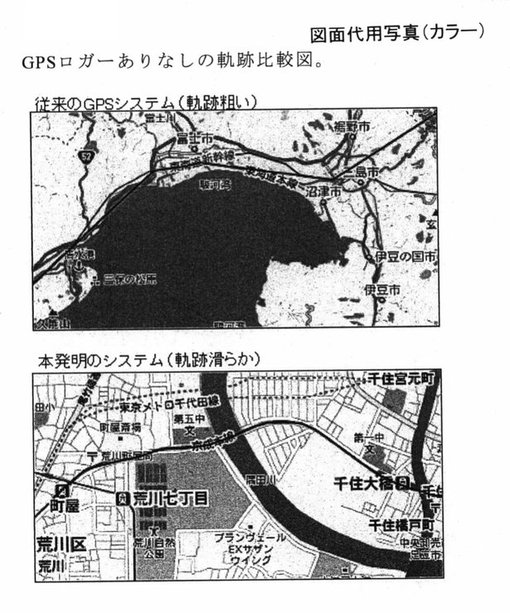
図4示すように本発明は40分間40ポイントの位置情報がリアルタイムで発信できる。図5示すように従来のシステムは40分間4ポイントしか発信できない。図12示すように本発明は従来システムと同じ発信間隔でありながら、よりきめ細かな間隔で蓄積したGPS位置情報が発信されることにより、高密度の位置情報がリアルタイムで取得できる。
図6、図7、図8示すように、一時無線サービスエリア外に入っても位置情報は蓄積され、再度無線サービスエリアに入った時にこれまでの位置情報が送信される。
また、図2、図10示すように、振動センサー制御により、動いていない時には不要な位置情報を蓄積及び送信しなくて済む。
【産業上の利用可能性】
【0011】
前記[0010]項では動物生態調査や各種工業実験など、きめ細かい間隔の位置情報をリアルタイムで取得できる。
【0012】
前記[0010]項では登山の際、長距離運送時など郊外の無線サービスエリアない場所の軌跡も蓄積されているので、無線サービスエリアに入ると即座と取得できる。
【0013】
前記[0010]項では振動センサーを監視する事により、無駄な位置情報のデータ収拾及び無線通信もされなくなり、利用可能時間が長くなる。
【図面の簡単な説明】
【0014】
【図1】本システム実施の形態によるシステム構成図。
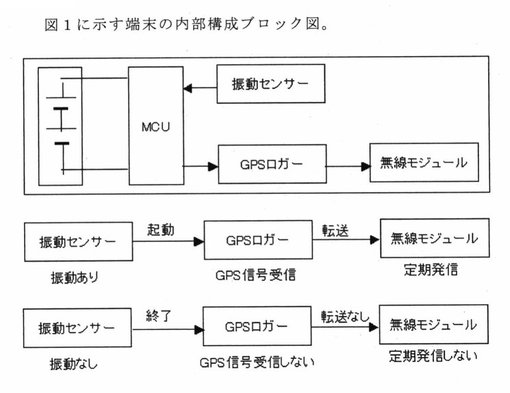
【図2】図1に示す端末の内部構成ブロック図。
【図3】従来システムの構成図。
【図4】図1に示す10分ごと10ポイントの発信イメージ図。
【図5】図2に示す10分ごと一箇所の発信イメージ図。
【図6】図1に示す電波受信エリア内のイメージ図。
【図7】図1に示す電波受信エリア外のイメージ図。
【図8】図1に示す再度電波受信エリア内に入る場合のイメージ図。
【図9】位置情報取得可能のカバーエリアのイメージ図。
【図10】図1に示す移動中と静止中のイメージ図。
【図11】振動センサーありなしの軌跡比較図。
【図12】GPSロガーありなしの軌跡比較図。
【技術分野】
【0001】
リアルタイムGPSシステムにおいて、必要最小限且つ高密度の位置情報をより確実に発信できることに関する物である。
【背景技術】
【0002】
従来のリアルタイム位置情報発信システムは無線サービスエリア内に於いて発信間隔ごと、図3、図5に示すように一箇所のGPS位置情報を取得し、送信することである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−339757公報
【発明が解決しようとする課題】
【0004】
しかしながら、以上のシステムによれば、無線サービスエリアにおいて発信間隔ごとに1件の位置情報しか発信できない。3分間隔以下の発信は通信システム上制限され、また発信間隔を短くすると端末からの送信回数が増え、電池の消耗が激しくなり、利用動作時間が短い。また無線サービスエリア以外のところでは、位置情報が発信できなくなり、履歴が取れない。従来システムの端末は夜寝ている時も(動いていない時にも)、同じ場所の位置情報を発信し続ける為に電池消耗が激しくまた通信費も高騰となる。
本発明は、必要最小限且つ高密度のGPS位置情報をより効率良く、確実に発信できることを課題とする。また、GPS衛星信号が受信出来ないエリアでも、おおよその位置情報が把握できることを課題とする。
【課題を解決するための手段】
【0005】
以上の課題を解決するために、本発明は振動センサーとGPSロガーと無線モジュールを有機的に結合することにより省電流、省無線回線運用コストを実現するリアルタイム位置情報発信システムである。また、GPS衛星信号が受信出来ないエリアで、基地局情報を元に位置情報を提供することで、限りなく監視盲点を狭くするシステムである。
【発明の効果】
【0006】
本発明によれば、GPSロガーと無線モジュールと結合したことで、図4示すように1分間隔(GPSロガー最短記録間隔は1秒間隔)の位置情報を蓄積し、一定間隔で発信することが可能となる。
【0007】
図6、図7、図8示すように、無線サービスエリア外でもGPSロガーに、位置情報が蓄積され、無線サービスエリアに入った時に蓄積データを発信される為に時間差のない動態管理システムが確立できる。
【0008】
図9示すように、振動センサー制御により、動いていない時には無駄な情報がGPSロガーに蓄積されなくなる。通信モジュールも休眠モードに入り、発信しなくなる。それにより、通信量及び電池消耗が節約でき、通信費が減り、利用可能時間が長くなる。図11示すように軌跡がすっきりとなる。
【0009】
図9示すように、GPS衛星信号が受信出来ないエリアで、基地局情報を元に位置情報を提供することができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明による振動センサー式リアルタイムGPSロガーシステムの実施の形態を図1に示す。GPSロガー(図1の3)がGPS人工衛星(図1の1)から1分ごとの位置情報をロギングする。発信間隔10分間が経ったら、無線通信装置(図1の4)を通して、10ポイントの位置情報を発信する。基地局(図1の2)を経由し、軌跡サーバー(図1の6)に伝送される。
図4示すように本発明は40分間40ポイントの位置情報がリアルタイムで発信できる。図5示すように従来のシステムは40分間4ポイントしか発信できない。図12示すように本発明は従来システムと同じ発信間隔でありながら、よりきめ細かな間隔で蓄積したGPS位置情報が発信されることにより、高密度の位置情報がリアルタイムで取得できる。
図6、図7、図8示すように、一時無線サービスエリア外に入っても位置情報は蓄積され、再度無線サービスエリアに入った時にこれまでの位置情報が送信される。
また、図2、図10示すように、振動センサー制御により、動いていない時には不要な位置情報を蓄積及び送信しなくて済む。
【産業上の利用可能性】
【0011】
前記[0010]項では動物生態調査や各種工業実験など、きめ細かい間隔の位置情報をリアルタイムで取得できる。
【0012】
前記[0010]項では登山の際、長距離運送時など郊外の無線サービスエリアない場所の軌跡も蓄積されているので、無線サービスエリアに入ると即座と取得できる。
【0013】
前記[0010]項では振動センサーを監視する事により、無駄な位置情報のデータ収拾及び無線通信もされなくなり、利用可能時間が長くなる。
【図面の簡単な説明】
【0014】
【図1】本システム実施の形態によるシステム構成図。
【図2】図1に示す端末の内部構成ブロック図。
【図3】従来システムの構成図。
【図4】図1に示す10分ごと10ポイントの発信イメージ図。
【図5】図2に示す10分ごと一箇所の発信イメージ図。
【図6】図1に示す電波受信エリア内のイメージ図。
【図7】図1に示す電波受信エリア外のイメージ図。
【図8】図1に示す再度電波受信エリア内に入る場合のイメージ図。
【図9】位置情報取得可能のカバーエリアのイメージ図。
【図10】図1に示す移動中と静止中のイメージ図。
【図11】振動センサーありなしの軌跡比較図。
【図12】GPSロガーありなしの軌跡比較図。
【特許請求の範囲】
【請求項1】
振動センサーとGPSロガーと無線モジュールを有機的に結合することを特徴とするリアルタイム位置情報発信システムである。
【請求項2】
前記請求項1記載の振動センサーとGPSロガーと無線モジュールを有機的に結合することにより、GPSロガーに蓄積した最短1秒間隔の位置情報が発信でき、動いていない時には無駄な位置情報を発信しない装置。
【請求項3】
前記請求項1記載の無線モジュールが振動センサーから直接信号を受けず、GPSシリアル信号の有無により、移動中か静止中を判断し、送信可否を制御するシステムである。
【請求項4】
無線圏外エリアに於いてもGPSデータを蓄積しているので無線サービスエリアに到達した時点で全ての位置データを伝送するシステムである。
【請求項5】
GPS衛星信号が受信出来ない時はPHS基地局情報を元に位置情報を送出しておおよその位置情報をサポートする伝送システムである。
【請求項1】
振動センサーとGPSロガーと無線モジュールを有機的に結合することを特徴とするリアルタイム位置情報発信システムである。
【請求項2】
前記請求項1記載の振動センサーとGPSロガーと無線モジュールを有機的に結合することにより、GPSロガーに蓄積した最短1秒間隔の位置情報が発信でき、動いていない時には無駄な位置情報を発信しない装置。
【請求項3】
前記請求項1記載の無線モジュールが振動センサーから直接信号を受けず、GPSシリアル信号の有無により、移動中か静止中を判断し、送信可否を制御するシステムである。
【請求項4】
無線圏外エリアに於いてもGPSデータを蓄積しているので無線サービスエリアに到達した時点で全ての位置データを伝送するシステムである。
【請求項5】
GPS衛星信号が受信出来ない時はPHS基地局情報を元に位置情報を送出しておおよその位置情報をサポートする伝送システムである。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−15503(P2013−15503A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−158366(P2011−158366)
【出願日】平成23年7月1日(2011.7.1)
【出願人】(511175369)株式会社リアルタイムシステムズ (1)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月1日(2011.7.1)
【出願人】(511175369)株式会社リアルタイムシステムズ (1)
【Fターム(参考)】
[ Back to top ]