
損傷検査装置、方法
【課題】運動機構の軌道体転走面に関し、短時間で作業者に依存しない損傷診断が可能な損傷検査装置、方法を提案する。
【解決手段】転動体転走面が形成される軌道体21と、軌道体21に沿って相対移動可能な移動体22と、移動体22に保持されて相対移動に用いられる複数の転動体と、を備えた運動機構20における転動体転走面の損傷を検査する装置1であって、軌道体21或いはその近傍に設置された加速度センサ33,34と、加速度センサ33,34の信号を処理する信号処理部40と、を備える。
【解決手段】転動体転走面が形成される軌道体21と、軌道体21に沿って相対移動可能な移動体22と、移動体22に保持されて相対移動に用いられる複数の転動体と、を備えた運動機構20における転動体転走面の損傷を検査する装置1であって、軌道体21或いはその近傍に設置された加速度センサ33,34と、加速度センサ33,34の信号を処理する信号処理部40と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、損傷検査装置、方法に関する。
【背景技術】
【0002】
例えばリニアガイドやボールスプライン等のように、軌道体と移動体と転動体とを備える運動機構においては、レール等の軌道体の転走面の損傷の有無を確認する際には、作業者が目視にて損傷の有無を確認する損傷診断が行われている。
【特許文献1】特開2002−22617号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、検査に長時間を要する、損傷評価にばらつきが発生する等の問題がある。そのため、転走面の損傷の有無の検査を自動化することが望まれている。
【0004】
なお、特許文献1に記載の技術は、回転軸受が組み込まれた機械装置を分解することなく実稼動状態で回転軸受の異常診断を行う技術であって、高い精度が求められる運動機構の軌道体転走面の損傷診断には適さない。
【0005】
本発明は、上述した事情に鑑みてなされたもので、運動機構の軌道体転走面に関し、短時間で作業者に依存しない損傷診断が可能な損傷検査装置、方法を提案することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る損傷検査装置では、上記課題を解決するために以下の手段を採用した。
第1の発明は、転動体転走面が形成される軌道体と、前記軌道体に係合して前記軌道体に沿って相対移動可能な移動体と、前記移動体に保持されて前記相対移動に用いられる複数の転動体と、を備えた運動機構における前記転動体転走面の損傷を検査する装置であって、前記軌道体或いはその近傍に設置された加速度センサと、前記加速度センサの検出信号を処理する信号処理部と、を備えることを特徴とする。
【0007】
また、前記信号処理部は、バンドパスフィルタを有し、特定の周波数帯域の検出信号を取得することを特徴とする。
【0008】
第2の発明は、転動体転走面が形成される軌道体と、前記軌道体に係合して前記軌道体に沿って相対移動可能な移動体と、前記移動体に保持されて前記相対移動に用いられる複数の転動体と、を備えた運動機構における前記転動体転走面の損傷を検査する方法であって、前記軌道体或いはその近傍に設置された加速度センサと、前記加速度センサの検出信号を処理する信号処理部と、を備え、前記信号処理部により特定の周波数帯域の検出信号を取得することを特徴とする。
【発明の効果】
【0009】
本発明によれば、短時間で、作業者に依存しない損傷診断が可能な損傷検査装置、方法が得られる。
【発明を実施するための最良の形態】
【0010】
以下、本発明に係る損傷検査装置、方法の実施形態について図面を参照して説明する。
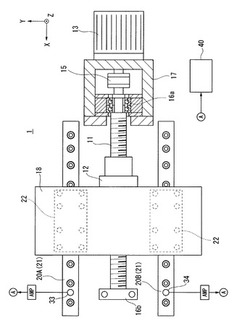
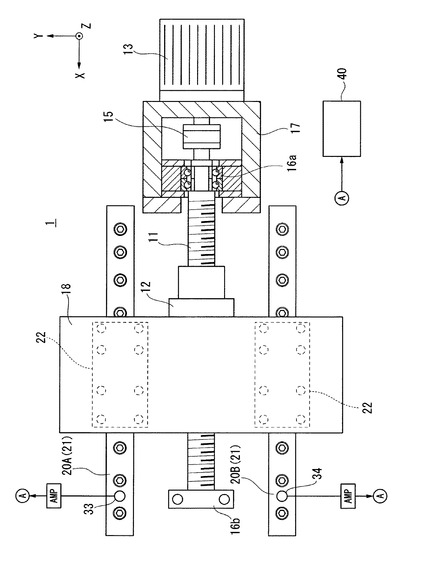
図1は、本発明に係る損傷検査装置1の実施形態を示す概略平面図である。
損傷検査装置1は、ねじ軸11とナット12とボール(不図示)からなるボールねじ10と、ねじ軸11を回転させてねじ軸11に螺合するナット12を往復運動させるサーボモータ13と、を備える。
【0011】
ねじ軸(軌道体)11は、一端にカップリング15を介してサーボモータ13に連結されている。このサーボモータ13は、不図示の制御部によって回転方向及び回転速度が制御される。
【0012】
ねじ軸11のカップリング15と接続された端部近傍は、サポート軸受16aにより回転自在に支持される。一方、ねじ軸11の他端は、サポート軸受16bを介して床面に対して回転自在に支持されている。
そして、カップリング15、サポート軸受16aは、サーボモータ13の取付ブラケットを兼ねたサポートケース17内に収納されている。そして、サポートケース17は、床面に固定される。
【0013】
ねじ軸11には、ナット(移動体)12が螺合しており、ねじ軸11の長手方向に相対移動可能に構成されている。
更に、ナット12には、移動テーブル18が固定されており、この移動テーブル18は、ねじ軸11の延在方向に対して平行配置された一対の直線運動装置20に沿って案内される。
【0014】
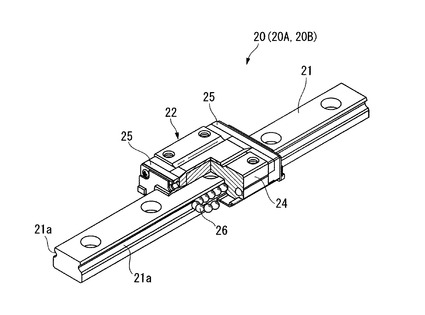
図2は、本実施形態に係る損傷検査装置1の試験体である直線運動装置20の一例を示す斜視図である。
直線運動装置20は、ガイドレール21と、このガイドレール21に沿って移動可能な移動ブロック22と、ガイドレール21と移動ブロック22との間に介在する複数のボール26と、を有するリニアガイドである。
【0015】
ガイドレール21は、直線状の軌道レールから成り、両側面に転動体であるボール26が転走するボール転走溝21aが形成されている。ガイドレール21は、床面等の基台上に固定される。
ガイドレール21に沿って移動する移動ブロック22は、ボール転走溝21aと対向する面にボール26が転走するボール転走溝が形成された移動ブロック本体24と、不図示の転動体方向転換路が形成されるとともに移動ブロック本体24の移動方向の前後端に固定された蓋体25とから構成されている。
【0016】
また、移動ブロック本体24には、転動体方向転換路によって方向転換されたボール26が通過する転動体戻り通路(不図示)が形成されている。そして、ボール転走溝21aとボール転走溝は、対となって負荷転動体転走路を形成し、転動体方向転換路、転動体戻り通路、転動体方向転換路の順に転動体循環路が形成される。
【0017】
図1に戻り、損傷検査装置1は、直線運動装置20のガイドレール21に設置された第一加速度センサ33、第二加速度センサ34と、これらの第一,第二加速度センサ33,34の検出信号をそれぞれ処理する信号処理部40と、を備えている。
【0018】
第一加速度センサ33は、ガイドレール21のうち基準側ガイドレール21Aに設置(マグネット吸着)される。第二加速度センサ34は、反基準側ガイドレール21Bに設置(マグネット吸着)される。なお、ガイドレール21A,21Bの近傍に設置してもよい。
第一加速度センサ33,第二加速度センサ34は、ガイドレール21に発生する振動のうち、例えば10kHz以下の振動(音)を検出する。
第一加速度センサ33,第二加速度センサ34は、例えば一軸加速度センサであって、ガイドレール21の延在方向に交差する方向(鉛直方向)の振動を検出する。
【0019】
信号処理部40は、アンプ、フィルタ及びFFT処理などが可能なデータレコーダからなる。そして、第一,第二加速度センサ33,34の検出信号(計測波形)を処理して、rms演算及びスペクトル演算等を行うことができる。
【0020】
移動テーブル18(移動ブロック22)をガイドレール21(21A,21B)の延在方向に沿って移動させることで、第一,第二加速度センサ33,34の検出信号を取得する。
ガイドレール21のボール転走溝21aに傷等の損傷が存在すると、傷等の損傷部分上をボール26が転動する際に、正常時とは異なった振動(音)が発生するので、この振動を第一,第二加速度センサ33,34の検出信号として取得する。
【0021】
表1は、第一,第二加速度センサ33,34と信号処理部40の一覧である。
【0022】
【表1】

【0023】
表2及び表3は、計測条件である。
【0024】
【表2】
【0025】
【表3】
【0026】
移動テーブル18(移動ブロック22)のストロークは350mmである。移動テーブル18の移動速度(最高速度)は、500、900、1400mm/secの3種類にて測定を行った。
【0027】
計測波形と評価に使用した演算処理は以下の通りである。
計測波形は、停止時間を含む片側ストロークの信号を計測する。アンプのゲインによる補正を除くために、計測電圧をゲインで割ったセンサ出力換算値を採用している。
すなわち、センサ出力電圧=計測電圧/ゲイン
である。
【0028】
rms(Root Mean Square:二乗平均平方根)演算は、計測波形から、表3に示す区間を抜き取り、抜き取った波形でrms演算を実施する。すなわち、加速度センサの信号でフィルタ処理をしているが、この場合、計測波形にIIRフィルタをかけてから、表3に示す区間を抜き取っている。
【0029】
スペクトル演算は、計測波形に対して、2000ポイントの区間で分割し、各々のスペクトルを平均化している。
【0030】
損傷検査装置1の試験体として、予め損傷度合いの異なる6対の直線運動装置20(No.0〜No.5)を用意した。
ここで、No.0は損傷のない新品の直線運動装置20である。そして、No.1〜No.5に従って、損傷度合いが大きくなっている。
【0031】
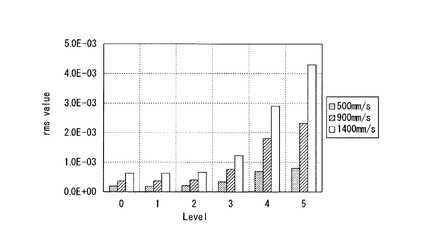
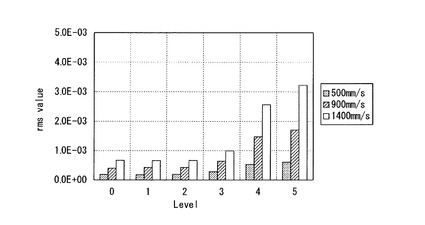
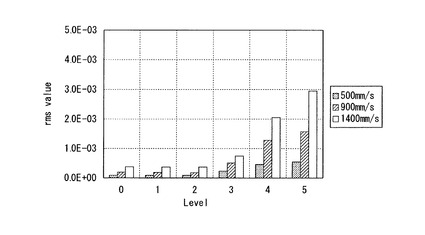
図3、図4は、第一加速度センサ33,第二加速度センサ34の信号のrms強度と損傷度合いとの関係を示す図である。図3は第一加速度センサ33(基準側ガイドレール21A)、図4は第二加速度センサ34(反基準側ガイドレール21B)の結果を示す。
ここで、損傷度合い(level)は、任意にてレベル分けを行っている。
アンプのフィルタが5Hz−10kHzであり、この周波数範囲において、損傷度合いがレベル2までは、ほとんど強度に変化がないが、損傷度合いがレベル3以上になると、損傷度合いに応じて、信号強度が大きくなる。
【0032】
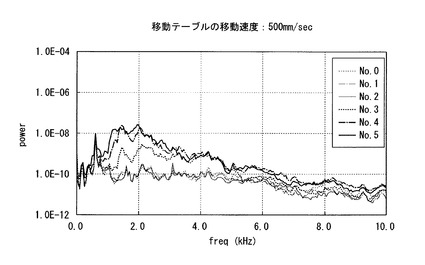
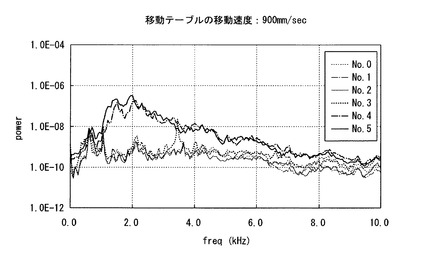
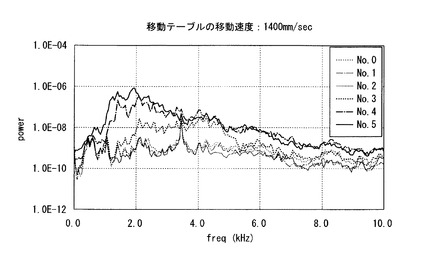
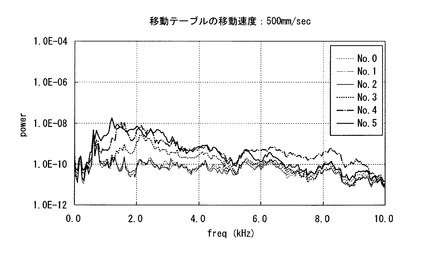
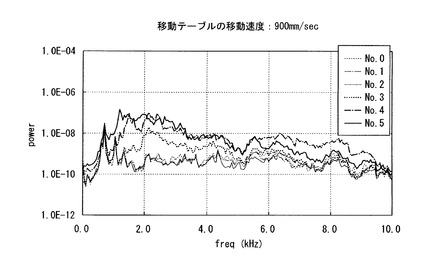
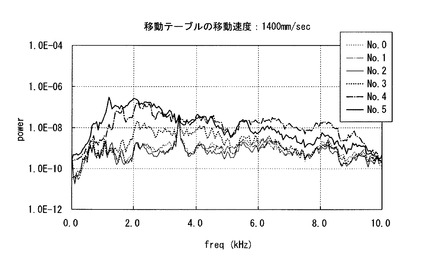
図5、図6、図7は、第一加速度センサ33(基準側ガイドレール21A)の信号の周波数特性を示す図である。図5は移動テーブル18の移動速度が500mm/sec、図6は900mm/sec、図7は1400mm/secの場合を示す。
なお、周波数の演算に用いた波形は、停止時間を含む波形であり、絶対強度とはならない(相対比較は可能)。
レベル3以上で損傷度合いの大きさに依存して1kHz〜4kHz程度の周波数範囲の強度が徐々に大きくなっている。この周波数帯域は駆動速度で周波数は変化しない。
【0033】
図8、図9、図10は、第二加速度センサ34(反基準側ガイドレール21B)の信号の周波数特性を示す図である。図8は移動テーブル18の移動速度が500mm/sec、図9は900mm/sec、図10は1400mm/secの場合を示す。
なお、周波数の演算に用いた波形は、停止時間を含む波形であり、絶対強度とはならない(相対比較は可能)。
レベル3以上で損傷度合いの大きさに依存して1kHz〜4kHz程度の周波数範囲の強度が大きくなっている。この周波数帯域は駆動速度で周波数は変化しない。このことから、損傷度合いの大きいものは、1kHz〜4kHzの周波数を評価すればよいことが分かる。
【0034】
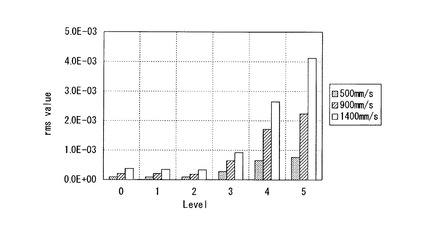
図11、図12は、第一加速度センサ33,第二加速度センサ34の信号をフィルタリングした後のrms強度を示す図である。図11は第一加速度センサ33(基準側ガイドレール21A)、図12は第二加速度センサ34(反基準側ガイドレール21B)の結果を示す。
フィルタ条件:BW5次、HPF=1kHz、LPF=4kHz
計測波形をフィルタ処理した後の信号強度で比較すると、フィルタを使用しない場合に比べて、容易に損傷度合いの大きさの診断が可能である。
【0035】
以上、説明したように、本願発明に係る損傷検査装置、方法によれば、短時間で、作業者に依存しない損傷診断が可能となる。
ガイドレール21又は移動テーブル18のいずれかに加速度センサ33,34を設置することで、損傷度合いの診断が可能になる。特に、診断の精度を向上させるために、特定の周波数帯域のバンドパスフィルタを使用することが望ましい。
そして、計測波形をフィルタ処理した後の信号強度が所定の閾値を超えるか否かを判定することで、損傷度合いの診断を的確に行うことができる。
【0036】
なお、上述した実施の形態において示した動作手順、あるいは各構成部材の諸形状や組み合わせ等は一例であって、本発明の主旨から逸脱しない範囲において設計要求等に基づき種々変更可能である。
【0037】
試験体としての運動機構としては、直線運動装置20に限らない。ボールスプライン、ローラスプライン、ボールねじ等であってもよい。
【0038】
移動テーブル18(移動ブロック22)を移動させる駆動手段としては、モータとボールねじからなる駆動機構に限らない。リニアモータの方が好ましい。
【図面の簡単な説明】
【0039】
【図1】本発明に係る損傷検査装置1の実施形態を示す概略平面図である。
【図2】試験体である直線運動装置20の一例を示す斜視図である。
【図3】第一加速度センサ33のrms強度と損傷度合いの関係を示す図である。
【図4】第二加速度センサ34のrms強度と損傷度合いの関係を示す図である。
【図5】第一加速度センサ33の信号の周波数特性を示す図(移動テーブル18の移動速度:500mm/sec)である。
【図6】第一加速度センサ33の信号の周波数特性を示す図(移動テーブル18の移動速度:900mm/sec)である。
【図7】第一加速度センサ33の信号の周波数特性を示す図(移動テーブル18の移動速度:1400mm/sec)である。
【図8】第二加速度センサ34の信号の周波数特性を示す図(移動テーブル18の移動速度:500mm/sec)である。
【図9】第二加速度センサ34の信号の周波数特性を示す図(移動テーブル18の移動速度:900mm/sec)である。
【図10】第二加速度センサ34の信号の周波数特性を示す図(移動テーブル18の移動速度:1400mm/sec)である。
【図11】第一加速度センサ33の信号をフィルタリングした後のrms強度を示す図である。
【図12】第二加速度センサ34の信号をフィルタリングした後のrms強度を示す図である。
【符号の説明】
【0040】
1…損傷検査装置、 18…移動テーブル、 20…直線運動装置(運動機構)、 21…ガイドレール(軌道体)、 21a…ボール転走溝(転動体転走面)、 22…移動ブロック(移動体)、 26…ボール、 33…第一加速度センサ、 34…第二加速度センサ、 40…信号処理部
【技術分野】
【0001】
本発明は、損傷検査装置、方法に関する。
【背景技術】
【0002】
例えばリニアガイドやボールスプライン等のように、軌道体と移動体と転動体とを備える運動機構においては、レール等の軌道体の転走面の損傷の有無を確認する際には、作業者が目視にて損傷の有無を確認する損傷診断が行われている。
【特許文献1】特開2002−22617号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、検査に長時間を要する、損傷評価にばらつきが発生する等の問題がある。そのため、転走面の損傷の有無の検査を自動化することが望まれている。
【0004】
なお、特許文献1に記載の技術は、回転軸受が組み込まれた機械装置を分解することなく実稼動状態で回転軸受の異常診断を行う技術であって、高い精度が求められる運動機構の軌道体転走面の損傷診断には適さない。
【0005】
本発明は、上述した事情に鑑みてなされたもので、運動機構の軌道体転走面に関し、短時間で作業者に依存しない損傷診断が可能な損傷検査装置、方法を提案することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る損傷検査装置では、上記課題を解決するために以下の手段を採用した。
第1の発明は、転動体転走面が形成される軌道体と、前記軌道体に係合して前記軌道体に沿って相対移動可能な移動体と、前記移動体に保持されて前記相対移動に用いられる複数の転動体と、を備えた運動機構における前記転動体転走面の損傷を検査する装置であって、前記軌道体或いはその近傍に設置された加速度センサと、前記加速度センサの検出信号を処理する信号処理部と、を備えることを特徴とする。
【0007】
また、前記信号処理部は、バンドパスフィルタを有し、特定の周波数帯域の検出信号を取得することを特徴とする。
【0008】
第2の発明は、転動体転走面が形成される軌道体と、前記軌道体に係合して前記軌道体に沿って相対移動可能な移動体と、前記移動体に保持されて前記相対移動に用いられる複数の転動体と、を備えた運動機構における前記転動体転走面の損傷を検査する方法であって、前記軌道体或いはその近傍に設置された加速度センサと、前記加速度センサの検出信号を処理する信号処理部と、を備え、前記信号処理部により特定の周波数帯域の検出信号を取得することを特徴とする。
【発明の効果】
【0009】
本発明によれば、短時間で、作業者に依存しない損傷診断が可能な損傷検査装置、方法が得られる。
【発明を実施するための最良の形態】
【0010】
以下、本発明に係る損傷検査装置、方法の実施形態について図面を参照して説明する。
図1は、本発明に係る損傷検査装置1の実施形態を示す概略平面図である。
損傷検査装置1は、ねじ軸11とナット12とボール(不図示)からなるボールねじ10と、ねじ軸11を回転させてねじ軸11に螺合するナット12を往復運動させるサーボモータ13と、を備える。
【0011】
ねじ軸(軌道体)11は、一端にカップリング15を介してサーボモータ13に連結されている。このサーボモータ13は、不図示の制御部によって回転方向及び回転速度が制御される。
【0012】
ねじ軸11のカップリング15と接続された端部近傍は、サポート軸受16aにより回転自在に支持される。一方、ねじ軸11の他端は、サポート軸受16bを介して床面に対して回転自在に支持されている。
そして、カップリング15、サポート軸受16aは、サーボモータ13の取付ブラケットを兼ねたサポートケース17内に収納されている。そして、サポートケース17は、床面に固定される。
【0013】
ねじ軸11には、ナット(移動体)12が螺合しており、ねじ軸11の長手方向に相対移動可能に構成されている。
更に、ナット12には、移動テーブル18が固定されており、この移動テーブル18は、ねじ軸11の延在方向に対して平行配置された一対の直線運動装置20に沿って案内される。
【0014】
図2は、本実施形態に係る損傷検査装置1の試験体である直線運動装置20の一例を示す斜視図である。
直線運動装置20は、ガイドレール21と、このガイドレール21に沿って移動可能な移動ブロック22と、ガイドレール21と移動ブロック22との間に介在する複数のボール26と、を有するリニアガイドである。
【0015】
ガイドレール21は、直線状の軌道レールから成り、両側面に転動体であるボール26が転走するボール転走溝21aが形成されている。ガイドレール21は、床面等の基台上に固定される。
ガイドレール21に沿って移動する移動ブロック22は、ボール転走溝21aと対向する面にボール26が転走するボール転走溝が形成された移動ブロック本体24と、不図示の転動体方向転換路が形成されるとともに移動ブロック本体24の移動方向の前後端に固定された蓋体25とから構成されている。
【0016】
また、移動ブロック本体24には、転動体方向転換路によって方向転換されたボール26が通過する転動体戻り通路(不図示)が形成されている。そして、ボール転走溝21aとボール転走溝は、対となって負荷転動体転走路を形成し、転動体方向転換路、転動体戻り通路、転動体方向転換路の順に転動体循環路が形成される。
【0017】
図1に戻り、損傷検査装置1は、直線運動装置20のガイドレール21に設置された第一加速度センサ33、第二加速度センサ34と、これらの第一,第二加速度センサ33,34の検出信号をそれぞれ処理する信号処理部40と、を備えている。
【0018】
第一加速度センサ33は、ガイドレール21のうち基準側ガイドレール21Aに設置(マグネット吸着)される。第二加速度センサ34は、反基準側ガイドレール21Bに設置(マグネット吸着)される。なお、ガイドレール21A,21Bの近傍に設置してもよい。
第一加速度センサ33,第二加速度センサ34は、ガイドレール21に発生する振動のうち、例えば10kHz以下の振動(音)を検出する。
第一加速度センサ33,第二加速度センサ34は、例えば一軸加速度センサであって、ガイドレール21の延在方向に交差する方向(鉛直方向)の振動を検出する。
【0019】
信号処理部40は、アンプ、フィルタ及びFFT処理などが可能なデータレコーダからなる。そして、第一,第二加速度センサ33,34の検出信号(計測波形)を処理して、rms演算及びスペクトル演算等を行うことができる。
【0020】
移動テーブル18(移動ブロック22)をガイドレール21(21A,21B)の延在方向に沿って移動させることで、第一,第二加速度センサ33,34の検出信号を取得する。
ガイドレール21のボール転走溝21aに傷等の損傷が存在すると、傷等の損傷部分上をボール26が転動する際に、正常時とは異なった振動(音)が発生するので、この振動を第一,第二加速度センサ33,34の検出信号として取得する。
【0021】
表1は、第一,第二加速度センサ33,34と信号処理部40の一覧である。
【0022】
【表1】
【0023】
表2及び表3は、計測条件である。
【0024】
【表2】
【0025】
【表3】
【0026】
移動テーブル18(移動ブロック22)のストロークは350mmである。移動テーブル18の移動速度(最高速度)は、500、900、1400mm/secの3種類にて測定を行った。
【0027】
計測波形と評価に使用した演算処理は以下の通りである。
計測波形は、停止時間を含む片側ストロークの信号を計測する。アンプのゲインによる補正を除くために、計測電圧をゲインで割ったセンサ出力換算値を採用している。
すなわち、センサ出力電圧=計測電圧/ゲイン
である。
【0028】
rms(Root Mean Square:二乗平均平方根)演算は、計測波形から、表3に示す区間を抜き取り、抜き取った波形でrms演算を実施する。すなわち、加速度センサの信号でフィルタ処理をしているが、この場合、計測波形にIIRフィルタをかけてから、表3に示す区間を抜き取っている。
【0029】
スペクトル演算は、計測波形に対して、2000ポイントの区間で分割し、各々のスペクトルを平均化している。
【0030】
損傷検査装置1の試験体として、予め損傷度合いの異なる6対の直線運動装置20(No.0〜No.5)を用意した。
ここで、No.0は損傷のない新品の直線運動装置20である。そして、No.1〜No.5に従って、損傷度合いが大きくなっている。
【0031】
図3、図4は、第一加速度センサ33,第二加速度センサ34の信号のrms強度と損傷度合いとの関係を示す図である。図3は第一加速度センサ33(基準側ガイドレール21A)、図4は第二加速度センサ34(反基準側ガイドレール21B)の結果を示す。
ここで、損傷度合い(level)は、任意にてレベル分けを行っている。
アンプのフィルタが5Hz−10kHzであり、この周波数範囲において、損傷度合いがレベル2までは、ほとんど強度に変化がないが、損傷度合いがレベル3以上になると、損傷度合いに応じて、信号強度が大きくなる。
【0032】
図5、図6、図7は、第一加速度センサ33(基準側ガイドレール21A)の信号の周波数特性を示す図である。図5は移動テーブル18の移動速度が500mm/sec、図6は900mm/sec、図7は1400mm/secの場合を示す。
なお、周波数の演算に用いた波形は、停止時間を含む波形であり、絶対強度とはならない(相対比較は可能)。
レベル3以上で損傷度合いの大きさに依存して1kHz〜4kHz程度の周波数範囲の強度が徐々に大きくなっている。この周波数帯域は駆動速度で周波数は変化しない。
【0033】
図8、図9、図10は、第二加速度センサ34(反基準側ガイドレール21B)の信号の周波数特性を示す図である。図8は移動テーブル18の移動速度が500mm/sec、図9は900mm/sec、図10は1400mm/secの場合を示す。
なお、周波数の演算に用いた波形は、停止時間を含む波形であり、絶対強度とはならない(相対比較は可能)。
レベル3以上で損傷度合いの大きさに依存して1kHz〜4kHz程度の周波数範囲の強度が大きくなっている。この周波数帯域は駆動速度で周波数は変化しない。このことから、損傷度合いの大きいものは、1kHz〜4kHzの周波数を評価すればよいことが分かる。
【0034】
図11、図12は、第一加速度センサ33,第二加速度センサ34の信号をフィルタリングした後のrms強度を示す図である。図11は第一加速度センサ33(基準側ガイドレール21A)、図12は第二加速度センサ34(反基準側ガイドレール21B)の結果を示す。
フィルタ条件:BW5次、HPF=1kHz、LPF=4kHz
計測波形をフィルタ処理した後の信号強度で比較すると、フィルタを使用しない場合に比べて、容易に損傷度合いの大きさの診断が可能である。
【0035】
以上、説明したように、本願発明に係る損傷検査装置、方法によれば、短時間で、作業者に依存しない損傷診断が可能となる。
ガイドレール21又は移動テーブル18のいずれかに加速度センサ33,34を設置することで、損傷度合いの診断が可能になる。特に、診断の精度を向上させるために、特定の周波数帯域のバンドパスフィルタを使用することが望ましい。
そして、計測波形をフィルタ処理した後の信号強度が所定の閾値を超えるか否かを判定することで、損傷度合いの診断を的確に行うことができる。
【0036】
なお、上述した実施の形態において示した動作手順、あるいは各構成部材の諸形状や組み合わせ等は一例であって、本発明の主旨から逸脱しない範囲において設計要求等に基づき種々変更可能である。
【0037】
試験体としての運動機構としては、直線運動装置20に限らない。ボールスプライン、ローラスプライン、ボールねじ等であってもよい。
【0038】
移動テーブル18(移動ブロック22)を移動させる駆動手段としては、モータとボールねじからなる駆動機構に限らない。リニアモータの方が好ましい。
【図面の簡単な説明】
【0039】
【図1】本発明に係る損傷検査装置1の実施形態を示す概略平面図である。
【図2】試験体である直線運動装置20の一例を示す斜視図である。
【図3】第一加速度センサ33のrms強度と損傷度合いの関係を示す図である。
【図4】第二加速度センサ34のrms強度と損傷度合いの関係を示す図である。
【図5】第一加速度センサ33の信号の周波数特性を示す図(移動テーブル18の移動速度:500mm/sec)である。
【図6】第一加速度センサ33の信号の周波数特性を示す図(移動テーブル18の移動速度:900mm/sec)である。
【図7】第一加速度センサ33の信号の周波数特性を示す図(移動テーブル18の移動速度:1400mm/sec)である。
【図8】第二加速度センサ34の信号の周波数特性を示す図(移動テーブル18の移動速度:500mm/sec)である。
【図9】第二加速度センサ34の信号の周波数特性を示す図(移動テーブル18の移動速度:900mm/sec)である。
【図10】第二加速度センサ34の信号の周波数特性を示す図(移動テーブル18の移動速度:1400mm/sec)である。
【図11】第一加速度センサ33の信号をフィルタリングした後のrms強度を示す図である。
【図12】第二加速度センサ34の信号をフィルタリングした後のrms強度を示す図である。
【符号の説明】
【0040】
1…損傷検査装置、 18…移動テーブル、 20…直線運動装置(運動機構)、 21…ガイドレール(軌道体)、 21a…ボール転走溝(転動体転走面)、 22…移動ブロック(移動体)、 26…ボール、 33…第一加速度センサ、 34…第二加速度センサ、 40…信号処理部
【特許請求の範囲】
【請求項1】
転動体転走面が形成される軌道体と、前記軌道体に係合して前記軌道体に沿って相対移動可能な移動体と、前記移動体に保持されて前記相対移動に用いられる複数の転動体と、を備えた運動機構における前記転動体転走面の損傷を検査する装置であって、
前記軌道体或いはその近傍に設置された加速度センサと、
前記加速度センサの検出信号を処理する信号処理部と、
を備えることを特徴とする損傷検査装置。
【請求項2】
前記信号処理部は、バンドパスフィルタを有し、特定の周波数帯域の検出信号を取得することを特徴とする請求項1に記載の損傷検査装置。
【請求項3】
転動体転走面が形成される軌道体と、前記軌道体に係合して前記軌道体に沿って相対移動可能な移動体と、前記移動体に保持されて前記相対移動に用いられる複数の転動体と、を備えた運動機構における前記転動体転走面の損傷を検査する方法であって、
前記軌道体或いはその近傍に設置された加速度センサと、
前記加速度センサの検出信号を処理する信号処理部と、
を備え、
前記信号処理部により特定の周波数帯域の検出信号を取得することを特徴とする損傷検査方法。
【請求項1】
転動体転走面が形成される軌道体と、前記軌道体に係合して前記軌道体に沿って相対移動可能な移動体と、前記移動体に保持されて前記相対移動に用いられる複数の転動体と、を備えた運動機構における前記転動体転走面の損傷を検査する装置であって、
前記軌道体或いはその近傍に設置された加速度センサと、
前記加速度センサの検出信号を処理する信号処理部と、
を備えることを特徴とする損傷検査装置。
【請求項2】
前記信号処理部は、バンドパスフィルタを有し、特定の周波数帯域の検出信号を取得することを特徴とする請求項1に記載の損傷検査装置。
【請求項3】
転動体転走面が形成される軌道体と、前記軌道体に係合して前記軌道体に沿って相対移動可能な移動体と、前記移動体に保持されて前記相対移動に用いられる複数の転動体と、を備えた運動機構における前記転動体転走面の損傷を検査する方法であって、
前記軌道体或いはその近傍に設置された加速度センサと、
前記加速度センサの検出信号を処理する信号処理部と、
を備え、
前記信号処理部により特定の周波数帯域の検出信号を取得することを特徴とする損傷検査方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−96541(P2010−96541A)
【公開日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願番号】特願2008−265518(P2008−265518)
【出願日】平成20年10月14日(2008.10.14)
【出願人】(390029805)THK株式会社 (420)
【Fターム(参考)】
【公開日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願日】平成20年10月14日(2008.10.14)
【出願人】(390029805)THK株式会社 (420)
【Fターム(参考)】
[ Back to top ]