
搬送装置およびこれを備えた組合せ計量装置
【課題】 トラフ上の物品の種類に関わらず、スムーズかつ所望の搬送速度で搬送することが可能な搬送装置およびこれを備えた組合せ計量装置を提供する。
【解決手段】 搬送装置は、トラフ11を平行リンク機構20によって往復移動させてトラフ11上に載置された物品を所定の方向へ搬送する搬送装置である。トラフ11は、搬送方向における前方に向かって下方傾斜している。トラフ11の搬送面には、第1の面18aと第2の面18bとを含む突起部18が形成されている。第1の面18aは、第2の面18bと比較して搬送面に対する傾斜角度が大きい。
【解決手段】 搬送装置は、トラフ11を平行リンク機構20によって往復移動させてトラフ11上に載置された物品を所定の方向へ搬送する搬送装置である。トラフ11は、搬送方向における前方に向かって下方傾斜している。トラフ11の搬送面には、第1の面18aと第2の面18bとを含む突起部18が形成されている。第1の面18aは、第2の面18bと比較して搬送面に対する傾斜角度が大きい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トラフ上に載置された物品を、トラフを搬送方向における前後に揺動させて搬送する搬送装置およびこれを備えた組合せ計量装置に関する。
【背景技術】
【0002】
従来より、トラフ上に載置された物品を搬送する搬送装置が提供されている。このような搬送装置としては、トラフに接続された平行リンクを用いてトラフを搬送方向に往復移動させるものが挙げられる。
【0003】
例えば、特許文献1に開示された搬送装置は、搬送方向における後方に前方よりも高速でトラフを移動させる、いわゆるファーストバック搬送方式を採用した搬送装置であって、平行リンクに接続されたモータを正逆反転させてトラフを搬送方向において往復移動させることができる。
【特許文献1】特開2000−247427号公報(平成12年9月12日公開)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来の搬送装置では、以下に示すような問題点を有している。
【0005】
すなわち、上記公報に開示された搬送装置では、ファーストバック搬送方式によってトラフ上の物品を搬送方向前方に搬送しているが、鶏肉や漬物等のような表面に粘着性がある物品や軟体で振動を吸収する物品等については搬送方向前方へスムーズに搬送できない場合がある。
【0006】
本発明の課題は、トラフ上の物品の種類に関わらず、スムーズかつ所望の搬送速度で搬送することが可能な搬送装置およびこれを備えた組合せ計量装置を提供することにある。
【課題を解決するための手段】
【0007】
第1の発明に係る搬送装置は、トラフと、往復移動機構と、駆動部と、突起部と、を備えている。トラフは、搬送する物品を載置するとともに、その搬送面が搬送方向前方に向かって下方に傾斜している。往復移動機構は、トラフを揺動させる。駆動部は、往復移動機構を駆動する。突起部は、トラフの搬送面に形成されており、搬送面に対して搬送方向前方における面の傾斜角度が搬送方向後方における面の傾斜角度よりも大きい。
【0008】
ここでは、往復移動機構によって揺動されてトラフ上に載置された物品を所定の方向に搬送する搬送装置において、このトラフには搬送面に対する搬送方向前方への傾斜角度が搬送方向後方への傾斜角度よりも大きい突起部が形成されている。
【0009】
ここで、このようにトラフを搬送方向における前後に揺動させて物品を所定の方向へ搬送する搬送装置では、物品を一定の搬送量で供給するために、搬送方向前方へのスムーズな搬送を実現する一方で、トラフ上を物品が滑落する場合等の意図しない高速での搬送についても防止する必要がある。
【0010】
そこで、本発明の搬送装置では、トラフの搬送面を搬送方向前方へ下方傾斜させるとともに、搬送方向における前方、後方にそれぞれ形成された2つの面を有する突起部をトラフの搬送面に設けている。
【0011】
これにより、トラフの搬送方向前方への下方傾斜と往復移動機構を駆動することによるトラフの揺動とによって物品をスムーズに搬送方向前方へ搬送することができる。そして、トラフの揺動中における搬送方向後方へのずれを突起部の傾斜角度の大きい側の面によって防止するとともに、トラフの搬送面の搬送方向前方への下方傾斜していることによる搬送方向前方への物品の滑落を突起部の傾斜角度の緩い側の面によって防止することができる。この結果、物品のスムーズな搬送を実現する一方、物品の滑落による意図しない高速搬送についても防止することができる。
【0012】
第2の発明に係る搬送装置は、第1の発明に係る搬送装置であって、往復移動機構は、トラフを支持する垂直部材を有しており、垂直部材は、鉛直方向に平行になる第1状態と、搬送方向後方側に傾いた第2状態との間を含む範囲内を往復移動する。
【0013】
ここでは、トラフを支持しながら搬送方向において前後に揺動させる往復移動機構を構成する垂直部材が、垂直部材が鉛直方向に平行になる第1状態と、搬送方向における後方に傾いた第2状態との間を含む範囲内を往復移動する。
【0014】
これにより、トラフ上に載置された物品には、搬送方向斜め前方へ投げ上げるような力が加えられる。このため、搬送される物品が、例えば、粘着物等の搬送面上を滑りにくい物である場合でも、スムーズに所定の方向へ搬送することができる。
【0015】
第3の発明に係る搬送装置は、第1または第2の発明に係る搬送装置であって、駆動部による往復移動機構の駆動を制御する制御部をさらに備え、制御部は、トラフが搬送方向における前後に等速で往復移動するように駆動部を制御する。
【0016】
ここでは、制御部が、トラフが搬送方向における前後に等速で往復移動するように駆動部を制御する。
【0017】
これにより、搬送方向における前後においてトラフの移動速度を切り替える場合と比較して、モータ等の駆動部のトルクを低減して、モータ等の駆動部の容量を小さくすることができる。さらに、駆動部の制御を簡単にして、制御部における制御負担を軽減することができる。
【0018】
第4の発明に係る搬送装置は、第3の発明に係る搬送装置であって、制御部は、トラフが搬送方向における前後に一往復するごとに間欠で移動するように駆動部を制御する。
【0019】
ここでは、制御部が、トラフを間欠で搬送方向における前後に一往復するごとに、所定時間間隔を開けて移動するように駆動部を制御する。
【0020】
これにより、物品を所定の方向へ効率よく搬送することができる。
【0021】
第5の発明に係る搬送装置は、第1から第4の発明のいずれか1つに係る搬送装置であって、トラフの上流側に配置されており、載置された物品が中心部から分散するように揺動される略円形の分散テーブルと、分散テーブルを揺動させる駆動機構と、をさらに備えている。
【0022】
ここでは、物品が載置された略円形の分散テーブルを揺動させることで物品を分散させる分散部をトラフの上流側に設けている。
【0023】
これにより、略円形の分散テーブルの周囲に複数のトラフを配置して物品を搬送することで、分散テーブル上に載置された物品を360度方向に搬送することができる。
【0024】
第6の発明に係る搬送装置は、第5の発明に係る搬送装置であって、分散テーブルの物品の載置面の周端側には、分散テーブルにおける搬送方向前方側の面が搬送方向後方側の面よりも傾斜角度が大きい突起部が形成されている。
【0025】
ここでは、分散テーブルの載置面に形成された突起部によって、スムーズに物品を所定の方向へ搬送する。
【0026】
これにより、突起部が有している搬送方向前方側の面において分散テーブルが揺動中に物品が搬送方向における後方へ移動するのを防止するとともに、搬送方向後方側の面において適度な速度で物品を搬送することができる。
【0027】
第7の発明に係る搬送装置は、第5または第6の発明に係る搬送装置であって、分散テーブルは、駆動機構によって水平方向において揺動される。
【0028】
ここでは、トラフの上流側に配置された分散テーブルを、水平方向において揺動させる。
【0029】
これにより、トラフまでの物品の搬送をスムーズに行うことができる。
【0030】
第8の発明に係る搬送装置は、第5から第7の発明のいずれか1つに係る搬送装置であって、分散テーブルの周端とトラフとの間に配置されており、物品の搬送を一時的に停止させるシャッタ機構を、さらに備えている。
【0031】
ここでは、分散テーブルと、分散テーブルから物品が供給されるトラフとの間に物品の搬送を阻止したり開放したりするシャッタ機構を備えている。
【0032】
これにより、分散テーブルの周囲に複数のトラフが配置されている場合において、シャッタ機構によって開閉を切り換えることで、各トラフに対して所定の数(例えば1個ずつ)の物品を供給することができる。
【0033】
第9の発明に係る組合せ計量装置は、第1から第8の発明のいずれか1つに係る搬送装置と、搬送装置から供給される物品を計量する計量部と、計量された物品を排出する排出部と、を備えている。
【0034】
ここでは、組合せ計量装置において計量部に対して物品を供給する供給部として上記搬送装置を用いている。
【0035】
これにより、物品をスムーズに計量部まで搬送するとともに、トラフの搬送面における物品の滑落による意図しない高速搬送を防止することが可能な組合せ計量装置を提供することができる。
【発明の効果】
【0036】
本発明の搬送装置によれば、物品をスムーズに計量部まで搬送するとともに、トラフの搬送面における物品の滑落による意図しない高速搬送を防止することができる。
【発明を実施するための最良の形態】
【0037】
[実施形態1]
本発明の一実施形態に係る搬送装置について、図1〜図5を用いて説明すれば以下の通りである。
【0038】
<搬送装置10全体の構成>
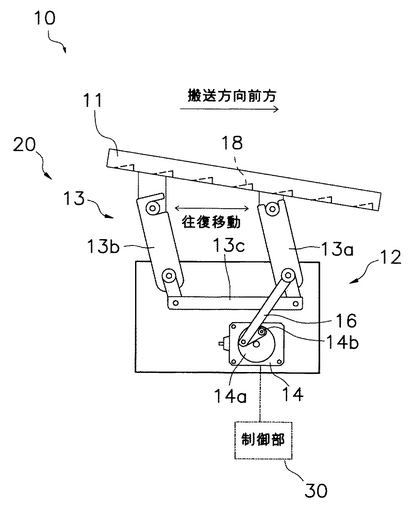
本発明の一実施形態に係る搬送装置10は、トラフ11上に載置された物品を所定の方向に搬送する搬送装置であって、図1に示すように、トラフ11と平行リンク機構(往復移動機構)20と、制御部30とを備えている。搬送装置10は、平行リンク機構20が搬送方向においてトラフ11を往復移動させながら物品を搬送する。また、搬送装置10においては、制御部30が、トラフ11の搬送方向における往復移動を、搬送方向前方への移動と搬送方向後方への移動とを間欠かつ等速で行う。制御部30は、後述する回転モータ14に接続されており、回転モータ14による回転駆動を制御するとともに、搬送装置10全体の制御を行う。
【0039】
<トラフ11>
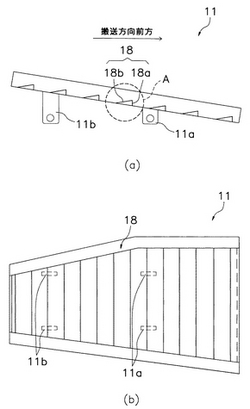
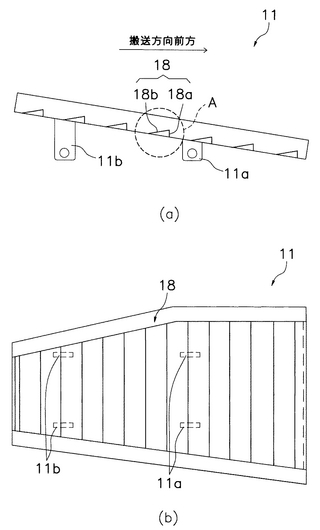
トラフ11は、搬送される物品を載置するためのステンレス鋼板を折り曲げて成形した板金製のトレイ状の部材であって、図1に示すように、搬送方向前方側へ下方傾斜した状態で、モータボックス12の直上に設けられている。また、トラフ11は、図2(a)および図2(b)に示すように、その裏面から鉛直方向下向きに突出する突出部11a,11bを各2個ずつ有している。突出部11a,11bは、後述する2本の第1リンク(垂直部材)13aおよび2本の第2リンク(垂直部材)13bのそれぞれの一方の端部に形成された第1凹部15a・第2凹部15b(図4(a),図4(b)参照)とねじ等によって連結される。これにより、トラフ11は、第1リンク13aおよび第2リンク13bによって支持される。
【0040】
本実施形態の搬送装置10では、トラフ11に対して、後述する平行リンク13を介してモータボックス12内の回転モータ(回転駆動源)14からの回転駆動力が伝達される。このとき、トラフ11が搬送方向において前後に往復移動することで、搬送方向前方へ物品を搬送する。
【0041】
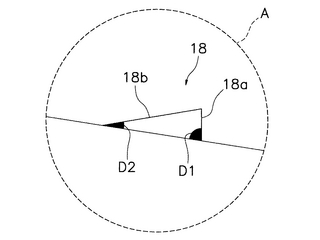
また、トラフ11の搬送面には、図2(a)および図2(b)に示すように、第1の面18aと第2の面18bとからなる複数の突起部18が形成されている。この突起部18は、トラフ11の搬送面において上部に突出するように形成されている。そして、第1の面18aは、第2の面18bよりも搬送方向における前側に配置されている。また、第1の面18aと第2の面18bとは、互いに交差する部分がトラフ11の搬送面から最も突出した部分となる。さらに、第1の面18aと第2の面18bとは、図5に示すように、トラフ11の搬送面に対して、第1の面18aの傾斜角度D1のほうが第2の面18bの傾斜角度D2よりも大きくなるように形成されている。このため、トラフ11を搬送方向における前後に往復移動させると、トラフ11上の物品は、トラフ11の往復移動とトラフ11の傾斜とによって搬送方向前方へ搬送されながら、第1の面18aによって搬送方向後方への移動を抑止されるとともに、第2の面18bによって搬送方向前側へ傾斜しているトラフ11上を物品が滑落することを回避できる。
【0042】
<平行リンク機構20>
平行リンク機構20は、搬送方向前方と搬送方向後方とでトラフ11を等速で移動させる機構である。そして、平行リンク機構20は、図1に示すように、モータボックス12、平行リンク13(第1リンク13a、第2リンク13b、第3リンク13c)、リンク部材16を備えている。
【0043】
(モータボックス12)
モータボックス12は、図1に示すように、内部に回転モータ(駆動部)14を備えている。そして、この回転モータ14を一方向に回転させることで、後述するリンク部材16を介して、平行リンク13(第1リンク13a、第2リンク13b、第3リンク13c)を搬送方向における前後に揺動させる。
【0044】
回転モータ14は、その回転軸の先端部分に円盤部材14aが接続されたステッピングモータである。円盤部材14aは、回転モータ14の回転中心から離れた位置に突出部14bを有している。そして、突出部14bは、一方の端部が第2リンク13bと接続されているリンク部材16の他方の端部と接続されている。これにより、回転モータ14を一方向に回転させるだけで、平行リンク13を前後に揺動させることができ、その結果、平行リンク13に接続されたトラフ11を往復移動させることが可能になる。
【0045】
また、回転モータ14は、制御部30によって回転制御されており、図1に示す搬送方向前方側への移動と搬送方向後方側への移動とが等速になるようにトラフ11を往復移動させる。さらに、回転モータ14は、制御部30によってトラフ11を一往復させるごとに所定時間停止させる、いわゆる間欠運転を行うように制御部30によって制御される。これにより、回転モータ14のトルクを軽減して、搭載するモータの容量を小さくすることができる。
【0046】
なお、本実施形態では、図1に示すように、モータボックス12がトラフ11の直下に配置されているが、これに限定されるものではない。例えば、モータボックス12がトラフ11の横や後ろに配置されていてもよい。
【0047】
(平行リンク13)
平行リンク13は、第1リンク13a、第2リンク13b、第3リンク13cを備えている。
【0048】
第1リンク13aは、図1に示すように、一方の端部が第3リンク13cおよびリンク部材16と、他方の端部がモータボックス12の側面とそれぞれ回動可能な状態で接続されている。一方、第2リンク13bは、一方の端部が第3リンク13cと、他方の端部がモータボックス12の側面とそれぞれ回動可能な状態で接続されている。これにより、平行リンク13は、回転モータ14からリンク部材16を介して回転駆動力が伝達されると、モータボックス12との接続位置を回動中心として鉛直平面内において前後に揺動する。
【0049】
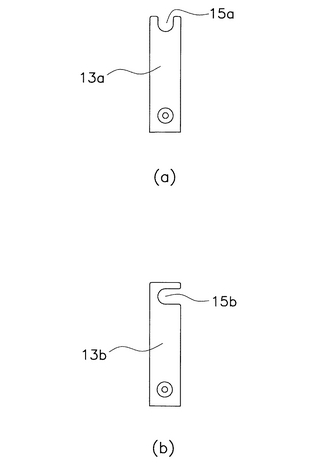
さらに、第1リンク13aは、モータボックス12の側面における第2リンク13bよりも搬送方向前方側に取り付けられている。また、第1リンク13aは、図4(a)に示すように、一方(上側)の端部に第1凹部15aを有している。そして、この第1凹部15aは、鉛直方向上向きに開口部分が向くように形成されており、上述したトラフ11の突出部11aを保持する。
【0050】
第2リンク13bは、第1リンク13aよりもモータボックス12における搬送方向後方側よりに取り付けられている。また、第2リンク13bは、図4(b)に示すように、一方(上側)の端部に第2凹部15bを有している。そして、この第2凹部15bは、物品の水平方向における搬送方向前方側、つまり平行リンク機構20から見て水平方向内向きに開口部分が向くように形成されており、上述したトラフ11の他方の突出部11bを保持する。
【0051】
第3リンク13cは、図1に示すように、第1リンク13aと第2リンク13bとをそれぞれの下部において接続する。これにより、リンク部材16と接続されている第1リンク13aを揺動させることにより、第2リンク13bについても揺動させることができ、結果として、平行リンク13全体を搬送方向において前後に揺動させることが可能になる。
【0052】
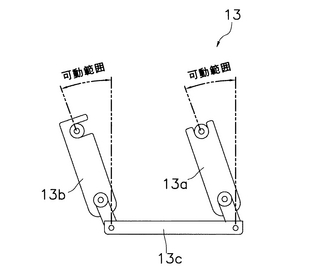
また、第1リンク13aおよび第2リンク13bは、図3に示すように、モータボックス12の側面との連結部分を中心にして回動して搬送方向後方側に傾斜した位置(第2状態)と鉛直方向に平行な位置(第1状態)との間の範囲内で前後に揺動する。このように、平行リンク13の可動範囲を搬送方向における後方側の範囲を含むようにトラフ11を往復移動させることで、トラフ11上の物品にはトラフ11から搬送方向前方側の斜め上向きに投げ上げるような力が加えられる。よって、搬送される物品はトラフ11上から斜め上方へ投げ上げられるようにして徐々に搬送方向前方へ搬送される。
【0053】
なお、平行リンク13は、トラフ11に対して、搬送方向後方側よりに、つまりトラフ11の中心部分よりも後ろよりに取り付けられている。
【0054】
(リンク部材16)
リンク部材16は、図1に示すように、一方の端部が平行リンク13(第2リンク13bおよびリンク部材16)に、他方の端部が回転モータ14の円盤部材14aの突出部14bに、それぞれ回動可能な状態で接続されている。そして、回転モータ14が回転を開始すると円盤部材14aが回転する。このとき、円盤部材14aの突出部14bに接続されたリンク部材16は、突出部14bを中心として回動自在に固定されているため、回転モータ14が回転することによりリンク部材16の他端に接続された平行リンク13(第1リンク13a)を、モータボックス12との接続部分を回転中心として前後に揺動させることができる。
【0055】
本実施形態の搬送装置10では、以上のように、回転モータ14による回転駆動を直接平行リンク13に伝達するのではなく、リンク部材16を介して伝達している。これにより、回転モータ14を正逆反転させなくても、一方向に回転させながらトラフ11を往復移動させることができる。
【0056】
<搬送装置10の動作説明>
ここで、本実施形態の搬送装置10による物品の搬送工程について説明する。
【0057】
まず、ユーザが搬送開始の指示を入力すると、制御部30が平行リンク機構20の回転モータ14の回転を開始させる。そして、この回転モータ14からの回転駆動力がリンク部材16を介して平行リンク13(第1リンク13a)に伝達され、搬送方向に平行な鉛直平面内で平行リンク13を前後に揺動させる。このとき、揺動される平行リンク13はトラフ11の裏面から突出した突出部11a,11bに接続されているため、トラフ11を搬送方向において前後に往復移動させることができる。
【0058】
また、トラフ11を搬送方向において前後に往復移動させる平行リンク13は、図3に示す可動範囲内において第1・第2リンク13a,13bにおける第3リンク13cとの接続側を回動中心として前後に揺動する。より詳細には、第1・第2リンク13a,13bは、鉛直方向に平行な第1状態と搬送方向における後方側へ傾斜した第2状態との間において繰り返し前後に揺動する。このように、搬送方向における後方側において第1・第2リンク13a,13bを前後に揺動させることで、搬送方向前方側の斜め上方へ投げ上げるようにトラフ11を往復移動させることができる。この結果、トラフ11上の物品に対して斜め上向きの力を付与することができるため、例えば、表面に粘着性のあるような物品や振動を吸収してしまう物品であってもスムーズに搬送することが可能になる。
【0059】
さらに、本実施形態では、上述のように搬送方向において前後に往復移動するトラフ11が、図1および図2に示すように、搬送方向前方に向かって下方傾斜している。そして、トラフ11の搬送面には、突起部18が形成されている。この突起部18は、第1の面18aと第2の面18bとを含んでいる。第1の面18aは搬送方向前方側に形成されている一方、第2の面18bは搬送方向後方側へ形成されている。そして、第1の面18aは、図5に示すように、第2の面18bと比較してトラフ11の搬送面に対する傾斜角度が大きくなるように(傾斜角度D1>傾斜角度D2)形成されている。このため、搬送される物品が、トラフ11が搬送方向において往復移動する際に搬送方向後方へ移動してしまうことを第1の面18aによって抑制することができる。そして、トラフ11が搬送方向前方側へ下方傾斜しているために搬送面上の物品が搬送面上を滑落することで搬送中の物品が必要以上の搬送速度で搬送面上を滑落してしまうという問題の発生を、第2の面18bによって抑制することができる。このように、トラフ11を搬送方向において前方に下方傾斜させることと、トラフ11上に突起部18を形成することとを組み合わせることで、必要以上の搬送速度で物品が搬送されることなく、表面に粘着性のある物品や振動を吸収してしまうような物品等であってもスムーズに搬送することができる。
【0060】
なお、上述したように、トラフ11の往復移動中には、搬送方向前方への移動と搬送方向後方への移動とが等速になるように制御部30によって制御される。これにより、駆動部(回転モータ14)への負荷を低減した状態で物品の搬送を行うことができるとともに、搬送方向前後において異なる速度で移動させる制御と比較して制御部30による制御負担を軽減することができる。さらに、トラフ11は、搬送方向において前後に往復移動する際に、一往復ごとに所定間隔をあけて間欠で移動する。このため、連続的に往復移動させる制御と比較して、トラフ11の移動回数を減らして効率よく物品の搬送を行うことができる。
【0061】
[搬送装置10の特徴]
(1)
本実施形態の搬送装置10は、図1に示すように、トラフ11を平行リンク機構20によって往復移動させてトラフ11上に載置された物品を所定の方向へ搬送する搬送装置であって、トラフ11が、搬送方向における前方に向かって下方傾斜している。そして、図2に示すように、トラフ11の搬送面には第1の面18aと第2の面18bとを含む突起部18が形成されている。そして、図5に示すように、第1の面18aの搬送面に対する傾斜角度D1は、第2の面18bの搬送面に対する傾斜角度D2よりも大きい。
【0062】
これにより、例えば、搬送される物品が表面に粘着性があったり、振動を吸収したりして搬送しにくい物品であっても、トラフ11の下方傾斜および第1の面18aによる搬送方向後方への物品の移動の抑制によってスムーズに搬送を行うことができる。さらに、トラフ11を搬送方向前方に向かって下方傾斜させていても、必要以上の搬送速度で物品が搬送されることや、トラフ11の往復移動を停止した際の物品のずれ落ち等の問題の発生を、第2の面18bによって防止することができる。この結果、トラフ11の搬送方向前方に向かう下方傾斜と、トラフ11の搬送面上に形成された突起部18の第1の面18a,第2の面18bとを組み合わせることで、物品の種類を問わず良好な搬送を行うことが可能になる。
【0063】
(2)
本実施形態の搬送装置10では、搬送方向においてトラフ11を往復移動させる往復移動機構としての平行リンク機構20に、トラフ11を支持する第1・第2リンク13a,13bを備えている。そして、第1リンク13a,第2リンク13bは、図3に示すように、鉛直方向に平行になる第1状態と、搬送方向における後方へ傾斜した第2状態との間において、前後に揺動する。
【0064】
このように、搬送方向における後方側の範囲を含むように平行リンク13(第1リンク13a、第2リンク13b)を揺動させることで、トラフ11上の物品に対して搬送方向斜め上方に向かう力を付与することができる。この結果、トラフ11上の物品を搬送方向における斜め上方へ投げ上げるようにして物品を搬送することができるため、表面に粘着性のある物品や振動を吸収してしまうような物品等であってもスムーズに搬送することができる。
【0065】
(3)
本実施形態の搬送装置10では、制御部30が、トラフ11が搬送方向における前方と後方とで等速で移動するように回転モータ14の回転駆動を制御する。
【0066】
これにより、例えば、ファーストバック搬送機構のように、搬送方向における前後においてトラフ11の移動速度を変更して駆動する機構と比較して、回転モータ14のトルクを低減してモータの容量を小さくすることができるとともに、制御部30による駆動制御の負担を軽減することができる。
【0067】
(4)
本実施形態の搬送装置10では、制御部30が、トラフ11を搬送方向において前後に一往復させるごとに所定時間を開けて駆動する、いわゆる間欠駆動を行う。
【0068】
これにより、連続的にトラフ11を往復移動させる場合と比較して、回転モータ14の回転数を削減して、より効率よく物品の搬送を行うことができる。
【0069】
[実施例]
ここでは、上記実施形態1において説明したトラフ11の下方傾斜とトラフ11の搬送面の突起部18とを組み合わせた搬送装置10の搬送性能についての試験結果を、図11〜図13を用いて説明する。
【0070】
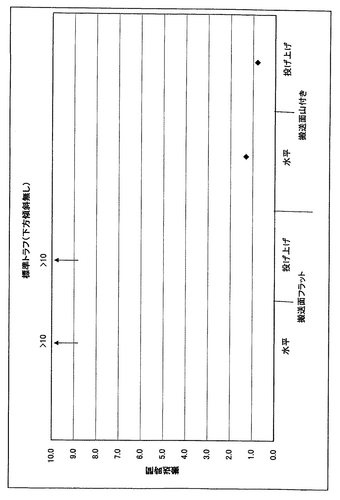
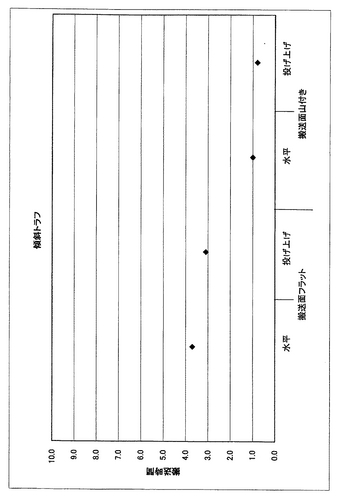
この搬送性能確認試験では、搬送距離200mm、搬送される物品として鶏肉を使用して、トラフ11の搬送方向前後における搬送速度を等速(1200pps)とした条件において、トラフ11の傾斜の有無、トラフ11の搬送面の突起物18の有無、第1・第2リンク13a,13bの可動範囲が水平か投げ上げ(後方稼動)か、についてそれぞれ試験を行った。
【0071】
まず、トラフ11の下方傾斜の有無については、下方傾斜無しの図11および下方傾斜有りの図12の試験結果を比較すると、トラフ11がフラット(下方傾斜無し)の試験結果とトラフ11を下方傾斜させた場合の試験結果とで、鶏肉の搬送時間が大幅に短縮されていることが分かる。例えば、搬送面がフラット(突起物無し)の試験結果同士で比較すると、下方傾斜無し(図11)では搬送時間が10秒以上かかっているのに対して、下方傾斜有り(図12)では4秒以下と短縮されている。これにより、トラフ11を搬送方向前方に向かって下方傾斜させたほうが、搬送時間の短縮が図れることが分かる。
【0072】
次に、トラフ11の搬送面に形成された突起部18の有無については、図11および図12の双方の試験結果から明らかなように、トラフ11の搬送面に突起部18を形成したほうが搬送時間を大幅に短縮できていることが分かる。例えば、図11の試験結果から分かるように、搬送面フラット(突起物無し)の試験結果が10秒以上であるのに対して、搬送面に突起部18を形成した山付きの試験結果では約1秒まで搬送時間が短縮されている。図12の試験結果についても同様に、搬送面フラット(突起物無し)の試験結果が3秒以上であるのに対して、山付きの試験結果は約1秒まで搬送時間を短縮している。これにより、トラフ11の搬送面に突起部18を形成すると、搬送時間の短縮を図れることが分かる。
【0073】
さらに、搬送面に突起部18を形成するとともにトラフ11を下方傾斜させた場合には、図12の試験結果に示すように、1秒以下まで搬送時間の短縮が図れる。
【0074】
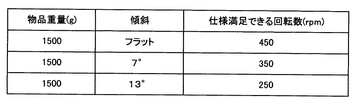
なお、トラフ11の下方傾斜の程度については、図13の試験結果に示すように、傾斜角度を7°、13°と大きくすると、仕様を満足させるために必要な回転モータ14の回転数を450rpmから350rpm、250rpmと落とすことができる。これにより、搬送される物品の性質に応じて、過度の搬送速度にならないような適切な傾斜角度でトラフ11の取付けを行うことで、トラフ11を往復移動させる回転モータ14の負担を軽減することができる。
【0075】
また、平行リンク13の第1・第2リンク13a,13bが搬送方向後方側に傾斜した状態(第1状態)と鉛直方向に向いた状態(第1状態)との間を揺動するようにして物品を投げ上げるように搬送することは、図11および図12の試験結果として示すように、投げ上げのほうが若干搬送時間を短縮できることが分かる。例えば、図12の試験結果によれば、搬送面フラット、搬送面山付きの試験結果ともに、投げ上げの試験結果のほうが若干搬送時間を短縮できている。
【0076】
以上の試験結果を参照すると、トラフ11を搬送方向前方に向かって下方傾斜させ、トラフ11の搬送面に突起部18を形成することで、トラフ11上の物品の搬送時間を大幅に短縮できることが分かる。さらに、平行リンク13については、トラフ11を水平に往復移動させるよりも、トラフ11上の物品を搬送方向前方へ投げ上げるように搬送方向後方に傾斜させる範囲内で往復移動させるほうが、若干の搬送時間の短縮が図れることも分かる。
【0077】
[実施形態2]
本発明の一実施形態に係る搬送装置を備えた組合せ計量装置について、図6〜図7を用いて説明すれば以下の通りである。
【0078】
<組合せ計量装置50全体の構成>
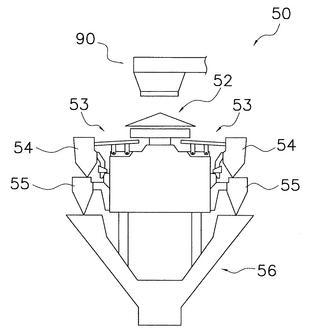
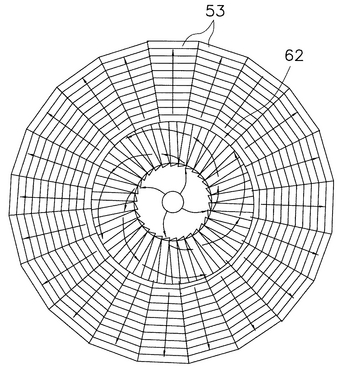
本実施形態に係る組合せ計量装置50は、図6に示すように、複数の計量ホッパ(計量部、排出部)55の計量値を用いて、被計量物の集合体が所定重量あるいは所定数量になるように組合せ計量を行う装置である。そして、組合せ計量装置50は、実施形態1において説明した搬送装置10を、供給トラフ群53として備えている。なお、供給トラフ群53の構成は、実施形態1において説明した搬送装置10と同様であるため、ここでは同じ符号を付し、詳細な構成についての説明は省略する。
【0079】
組合せ計量装置50は、主として、前段の供給コンベア装置90が被計量物(以下、物品という)を落下させる位置の真下に配置される円錐状の分散テーブル52と、分散テーブル52の周囲に配置される供給トラフ群(搬送装置)53と、複数のプールホッパ54および計量ホッパ55と、集合排出シュート56とから構成されている。
【0080】
分散テーブル52は、図7に示すように、傘状の円形板であって、駆動モータ(駆動機構)52aによって連続回転する。分散テーブル52の上面に供給コンベア装置90から供給された物品は、遠心力によって分散しながら供給トラフ群53へと移動する。
【0081】
供給トラフ群53の各トラフ11は、回転モータ14(図1および図7参照)からの回転駆動力が平行リンク13等を介して伝達されることで、搬送方向(分散テーブル52を中心とする半径方向外側)に向かって物品を搬送する。
【0082】
プールホッパ54は、供給トラフ群53から物品を受け取って一時的にプールし、図示しない制御部からの指令によって下部に設けられている開閉ゲートを開け、計量ホッパ55に物品を供給する。
【0083】
計量ホッパ55は、プールホッパ54の下方に設けられている。計量ホッパ55およびプールホッパ54は、トラフ11に対応して、円周方向に沿って複数配置されている。それぞれの計量ホッパ55は、ホッパ内の物品の重量を計測するためのロードセル(図示せず)を有しており、また、その下部には、計量ホッパ55が排出部として機能するために、物品を集合排出シュート56に投下するための開閉ゲート(図示せず)が設けられている。
【0084】
集合排出シュート56は、各計量ホッパ55から投下された物品を集めて、包装機などの後段の装置に物品を流し落とす。
【0085】
<分散テーブル52の構成>
分散テーブル52は、円周上に配置された供給トラフ群53の中心であって、供給トラフ群53の直上流側に配置されており、供給コンベア装置90から供給される物品を供給トラフ群53に向かって搬送する。
【0086】
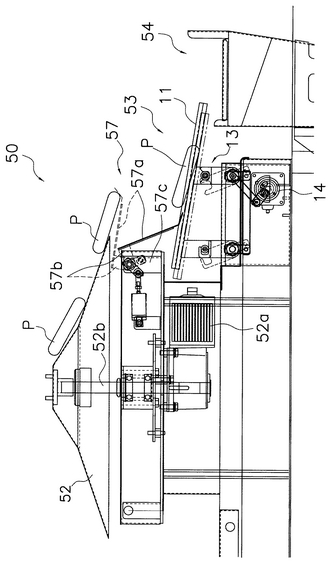
また、分散テーブル52は、駆動モータ(駆動機構)52aからの回転駆動力を受けて、水平方向において連続回転する(図7参照)。より詳細には、駆動モータ52aの回転駆動力が、図示しない複数のギアを介して分散テーブル52を支持する支持部52bに伝達されることで、支持部52bに接続されている分散テーブル52を水平方向において回転させる。これにより、分散テーブル52上に供給された物品に対して遠心力をかけることができ、分散テーブル52の周囲を取り囲むよう複数配置された供給トラフ群53のトラフ11に対してほぼ均一に物品を搬送することができる。
【0087】
さらに、分散テーブル52の略円形の外周部には、図7に示すように、各供給トラフ群53に対応して複数のシャッタ機構57が設けられている。シャッタ機構57は、通常時にはシャッタ部57aを閉状態となって物品Pの搬送を一時的に停止させ、供給トラフ群53またはプールホッパ54が空になると開状態となって物品Pを供給トラフ群53へ供給することにより、例えば、各供給トラフ群53またはプールホッパ54に対して1個ずつ物品Pを搬送する。また、シャッタ機構57は、シャッタ部57a、回動部57b、駆動部57cを有している。
【0088】
シャッタ部57aは、分散テーブル52から搬送されてきた物品Pを受け止めるトレイ状の部材であって、回動部57bに形成された回動中心を中心にして略水平状態から斜め下方へ回動することで、物品Pの搬送を一時的に停止させた状態から物品Pの供給状態へと移行して、物品Pを供給トラフ群53に対して搬送するタイミングを調整する。
【0089】
回動部57bは、シャッタ部57aの後端側(分散テーブル52側)に連結されており、駆動部57cに回転可能な状態で接続されている回動中心を中心にして回転することで、シャッタ部57aの開閉状態を切り換える。
【0090】
駆動部57cは、内部に図示しないシリンダ、リンクを備えており、シリンダの水平駆動をリンクを介して回動部57bに対して伝達することで、シャッタ部57aの開閉を行う。
【0091】
[組合せ計量装置50の特徴]
(1)
本実施形態の組合せ計量装置50では、図6に示すように、分散テーブル52、プールホッパ54、計量ホッパ55に加えて、上述した実施形態1で説明した搬送装置10を供給トラフ群53として複数搭載している。
【0092】
これにより、搬送対象となる物品が表面に粘着性のある物品や振動を吸収してしまうような物品(例えば、漬物や鶏肉等)であっても、過度の搬送速度になることなく、スムーズに下流側であるプールホッパ54まで搬送することができる。
【0093】
(2)
本実施形態の組合せ計量装置50では、図7に示すように、搬送装置としての供給トラフ群53の上流側に略傘型の分散テーブル52を配置しており、この分散テーブル52を回転させることで物品Pを分散テーブル52の回転中心から半径方向外側に向かって搬送する。
【0094】
これにより、分散テーブル52上の物品に対して遠心力を加えて、分散テーブル52の外周部に向かって物品Pを搬送することができる。
【0095】
(3)
本実施形態の組合せ計量装置50では、分散テーブル52を水平面内で回転させて分散テーブル52上に載置された物品Pを外周側へ搬送する。
【0096】
これにより、分散テーブル52の周辺に複数配置された供給トラフ群53に対してほぼ均一に物品Pの搬送を行うことができる。
【0097】
(4)
本実施形態の組合せ計量装置50では、図7に示すように、分散テーブル52の外周部とプールホッパ54との間にシャッタ機構57を設けている。
【0098】
これにより、シャッタ機構57のシャッタ部57aを開閉することで、分散テーブル52から物品が搬送される供給トラフ群53によるプールホッパ54に対する物品Pを供給するタイミングを制御することができる。よって、プールホッパ54や計量ホッパ55に対して、1個ずつ物品Pを供給する必要がある組合せ計量装置にも対応することができる。
【0099】
[他の実施形態]
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
【0100】
(A)
上記実施形態では、トラフ11の往復移動を平行リンク機構20によって行う例を挙げて説明した。しかし、本発明はこれに限定されるものではなく、他の搬送機構によってトラフ11を往復移動させる搬送装置であってもよい。
【0101】
(B)
上記実施形態1では、トラフ11の往復移動を等速で行っている例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0102】
例えば、往復移動の往路を復路側よりも早くした場合、あるいはその反対にした場合でも、上記と同様の効果を得ることができる。なお、このようなトラフ11の往復移動の駆動の種類については、搬送される物品の性質等を考慮して適切な搬送を行うことが可能な駆動に決定することができる。
【0103】
(C)
上記実施形態1では、トラフ11の往復移動を間欠で行っている例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0104】
例えば、トラフ11を連続して往復移動させるように制御した場合でも、上記と同様の効果を得ることができる。
【0105】
(D)
上記実施形態1では、図3に示すように、平行リンク13(第1リンク13a、第2リンク13b)の可動範囲を、鉛直方向と搬送方向における後方側に傾斜した位置との間とする例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0106】
例えば、鉛直方向よりも搬送方向前方側に傾斜した位置を含むような範囲において平行リンク13を往復移動させてもよい。この場合でも、第1リンク13a、第2リンク13bが搬送方向後方側に傾斜した範囲を搬送方向前方側に傾斜した範囲よりも多く含んでいることで、物品を投げ上げるように搬送することができる。
【0107】
(E)
上記実施形態2では、分散テーブル52を所定の速度で連続回転させることで物品を搬送する例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0108】
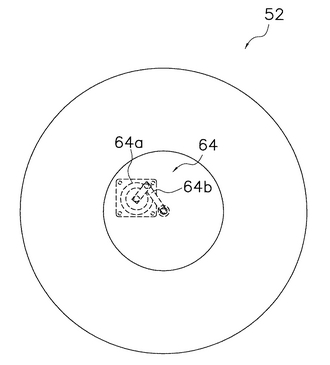
例えば、図8に示すような、駆動モータ64aとリンク機構64bとを有する駆動機構64を用いて、分散テーブル52の回転方向を交互に切り換えて物品に対して遠心力を与えるように制御してもよいし、連続回転ではなく間欠回転によって物品に対して遠心力を与えるように制御してもよい。
【0109】
(F)
上記実施形態2では、分散テーブル52の形状が略円錐形状である例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0110】
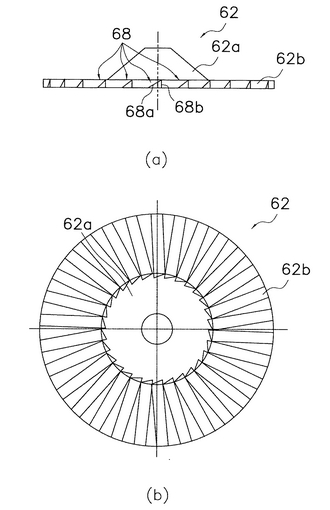
例えば、図9に示すように、円錐形状の頭頂部62aの周囲に水平方向に延びるドーナツ型の部材62bを取り付けた構成の分散テーブル62であってもよい。
【0111】
(G)
上記実施形態2では、分散テーブル52の搬送面には何も形成されていない例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0112】
例えば、図9に示すように、搬送面から突出した突起部68が形成された分散テーブル62であってもよい。この突起部68は、上述した実施形態1の突起部18と同様に、第1の面68aと第2の面68bとを有しており、搬送面に対する第1の面68aの傾斜角度が第2の面68bよりも大きくなるように形成されている。
【0113】
このため、図8に示す駆動機構64によって水平面内で分散テーブル62を所定の回転角度で回転方向を切り換えながら揺動させる場合には、実施形態1の突起部18と同様に、分散テーブル62上における物品の搬送方向(分散テーブル62の回転中心を中心とする円周方向(図10参照))後方への物品の移動を第1の面68aによって抑制することで、搬送方向前方に向かって物品をスムーズに搬送することができる。
【0114】
なお、この場合、分散テーブル62上の物品は、図10に示す矢印方向に分散移動していく。すなわち、分散テーブル62上の物品は、分散テーブル62の揺動によって分散テーブル62上を円周方向に滑りながら遠心力によって半径方向外側へ移動する。このため、分散テーブル62における搬送方向とは、分散テーブル62の回転中心を中心とする円周に沿った方向となる。よって、図8に示す駆動機構64によって水平方向において揺動される分散テーブル62では、突起部68の第1の面68aと第2の面68bとを搬送方向としたい向きに沿って配置すればよい。
【0115】
(H)
上記実施形態2では、分散テーブル52の外周部にシャッタ機構57を設けた例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0116】
例えば、シャッタ機構57を設けていない構成であっても、上記と同様の効果を得ることができる。ただし、上記実施形態2のように、シャッタ機構57を設けることで、例えば、鶏肉等の物品を1個ずつ計量ホッパに投入する必要がある組合せ計量装置等に対応することができる。
【産業上の利用可能性】
【0117】
本発明の搬送装置は、表面に粘着性のある物品や振動を吸収してしまう物品等の搬送しにくい物品を搬送方向下流側へスムーズに搬送することができるという効果を奏することから、多様な物品を搬送する搬送装置に対して広く適用可能である。
【図面の簡単な説明】
【0118】
【図1】本発明の一実施形態に係る搬送装置を示す側断面図。
【図2】(a),(b)は、図1の搬送装置が備えているトラフを示す側断面図と平面図。
【図3】図1の搬送装置が備えている平行リンク可動範囲を示す正面図。
【図4】(a),(b)は、2つの支持部材を示す正面図。
【図5】図2(a)のA部分を拡大した図。
【図6】本発明の他の実施形態に係る組合せ計量装置の構成を示す模式図。
【図7】図6の組合せ計量装置における分散テーブル周辺の詳細図。
【図8】(a),(b)は、図7の分散テーブル上からの物品の搬送方向を示す側面図および平面図。
【図9】本発明の他の実施形態に係る組合せ計量装置が備えた分散テーブルを揺動させる駆動機構を示す平面図。
【図10】(a),(b)は、本発明の他の実施形態に係る組合せ計量装置が備えた分散テーブルを示す側面図および平面図。
【図11】本発明の搬送装置の搬送性能を示す確認試験の結果を示すグラフ。
【図12】本発明の搬送装置の搬送性能を示す確認試験の結果を示すグラフ。
【図13】本発明の搬送装置の搬送性能を示す確認試験の結果を示すグラフ。
【符号の説明】
【0119】
10 搬送装置
11 トラフ
11a・11b 突出部
12 モータボックス
13 平行リンク
13a 第1リンク(垂直部材)
13b 第2リンク(垂直部材)
13c 第3リンク
14 回転モータ(駆動部)
14a 円盤部材
14b 突出部
15a 第1凹部
15b 第2凹部
16 リンク部材
18 突起部
18a 第1の面
18b 第2の面
20 平行リンク機構(往復移動機構)
30 制御部
50 組合せ計量装置
52 分散テーブル
52a 駆動モータ(駆動機構)
52b 支持部
53 供給トラフ群(搬送装置)
54 プールホッパ
55 計量ホッパ(計量部、排出部)
56 集合排出シュート
57 シャッタ機構
57a シャッタ部
57b 回動部
57c 駆動部
62 分散テーブル
62a 頭頂部
62b ドーナツ型の部材
64 駆動機構
64a 駆動モータ
64b リンク機構
68 突起部
68a 第1の面
68b 第2の面
90 供給コンベア装置
D1,D2 傾斜角度
P 物品
【技術分野】
【0001】
本発明は、トラフ上に載置された物品を、トラフを搬送方向における前後に揺動させて搬送する搬送装置およびこれを備えた組合せ計量装置に関する。
【背景技術】
【0002】
従来より、トラフ上に載置された物品を搬送する搬送装置が提供されている。このような搬送装置としては、トラフに接続された平行リンクを用いてトラフを搬送方向に往復移動させるものが挙げられる。
【0003】
例えば、特許文献1に開示された搬送装置は、搬送方向における後方に前方よりも高速でトラフを移動させる、いわゆるファーストバック搬送方式を採用した搬送装置であって、平行リンクに接続されたモータを正逆反転させてトラフを搬送方向において往復移動させることができる。
【特許文献1】特開2000−247427号公報(平成12年9月12日公開)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来の搬送装置では、以下に示すような問題点を有している。
【0005】
すなわち、上記公報に開示された搬送装置では、ファーストバック搬送方式によってトラフ上の物品を搬送方向前方に搬送しているが、鶏肉や漬物等のような表面に粘着性がある物品や軟体で振動を吸収する物品等については搬送方向前方へスムーズに搬送できない場合がある。
【0006】
本発明の課題は、トラフ上の物品の種類に関わらず、スムーズかつ所望の搬送速度で搬送することが可能な搬送装置およびこれを備えた組合せ計量装置を提供することにある。
【課題を解決するための手段】
【0007】
第1の発明に係る搬送装置は、トラフと、往復移動機構と、駆動部と、突起部と、を備えている。トラフは、搬送する物品を載置するとともに、その搬送面が搬送方向前方に向かって下方に傾斜している。往復移動機構は、トラフを揺動させる。駆動部は、往復移動機構を駆動する。突起部は、トラフの搬送面に形成されており、搬送面に対して搬送方向前方における面の傾斜角度が搬送方向後方における面の傾斜角度よりも大きい。
【0008】
ここでは、往復移動機構によって揺動されてトラフ上に載置された物品を所定の方向に搬送する搬送装置において、このトラフには搬送面に対する搬送方向前方への傾斜角度が搬送方向後方への傾斜角度よりも大きい突起部が形成されている。
【0009】
ここで、このようにトラフを搬送方向における前後に揺動させて物品を所定の方向へ搬送する搬送装置では、物品を一定の搬送量で供給するために、搬送方向前方へのスムーズな搬送を実現する一方で、トラフ上を物品が滑落する場合等の意図しない高速での搬送についても防止する必要がある。
【0010】
そこで、本発明の搬送装置では、トラフの搬送面を搬送方向前方へ下方傾斜させるとともに、搬送方向における前方、後方にそれぞれ形成された2つの面を有する突起部をトラフの搬送面に設けている。
【0011】
これにより、トラフの搬送方向前方への下方傾斜と往復移動機構を駆動することによるトラフの揺動とによって物品をスムーズに搬送方向前方へ搬送することができる。そして、トラフの揺動中における搬送方向後方へのずれを突起部の傾斜角度の大きい側の面によって防止するとともに、トラフの搬送面の搬送方向前方への下方傾斜していることによる搬送方向前方への物品の滑落を突起部の傾斜角度の緩い側の面によって防止することができる。この結果、物品のスムーズな搬送を実現する一方、物品の滑落による意図しない高速搬送についても防止することができる。
【0012】
第2の発明に係る搬送装置は、第1の発明に係る搬送装置であって、往復移動機構は、トラフを支持する垂直部材を有しており、垂直部材は、鉛直方向に平行になる第1状態と、搬送方向後方側に傾いた第2状態との間を含む範囲内を往復移動する。
【0013】
ここでは、トラフを支持しながら搬送方向において前後に揺動させる往復移動機構を構成する垂直部材が、垂直部材が鉛直方向に平行になる第1状態と、搬送方向における後方に傾いた第2状態との間を含む範囲内を往復移動する。
【0014】
これにより、トラフ上に載置された物品には、搬送方向斜め前方へ投げ上げるような力が加えられる。このため、搬送される物品が、例えば、粘着物等の搬送面上を滑りにくい物である場合でも、スムーズに所定の方向へ搬送することができる。
【0015】
第3の発明に係る搬送装置は、第1または第2の発明に係る搬送装置であって、駆動部による往復移動機構の駆動を制御する制御部をさらに備え、制御部は、トラフが搬送方向における前後に等速で往復移動するように駆動部を制御する。
【0016】
ここでは、制御部が、トラフが搬送方向における前後に等速で往復移動するように駆動部を制御する。
【0017】
これにより、搬送方向における前後においてトラフの移動速度を切り替える場合と比較して、モータ等の駆動部のトルクを低減して、モータ等の駆動部の容量を小さくすることができる。さらに、駆動部の制御を簡単にして、制御部における制御負担を軽減することができる。
【0018】
第4の発明に係る搬送装置は、第3の発明に係る搬送装置であって、制御部は、トラフが搬送方向における前後に一往復するごとに間欠で移動するように駆動部を制御する。
【0019】
ここでは、制御部が、トラフを間欠で搬送方向における前後に一往復するごとに、所定時間間隔を開けて移動するように駆動部を制御する。
【0020】
これにより、物品を所定の方向へ効率よく搬送することができる。
【0021】
第5の発明に係る搬送装置は、第1から第4の発明のいずれか1つに係る搬送装置であって、トラフの上流側に配置されており、載置された物品が中心部から分散するように揺動される略円形の分散テーブルと、分散テーブルを揺動させる駆動機構と、をさらに備えている。
【0022】
ここでは、物品が載置された略円形の分散テーブルを揺動させることで物品を分散させる分散部をトラフの上流側に設けている。
【0023】
これにより、略円形の分散テーブルの周囲に複数のトラフを配置して物品を搬送することで、分散テーブル上に載置された物品を360度方向に搬送することができる。
【0024】
第6の発明に係る搬送装置は、第5の発明に係る搬送装置であって、分散テーブルの物品の載置面の周端側には、分散テーブルにおける搬送方向前方側の面が搬送方向後方側の面よりも傾斜角度が大きい突起部が形成されている。
【0025】
ここでは、分散テーブルの載置面に形成された突起部によって、スムーズに物品を所定の方向へ搬送する。
【0026】
これにより、突起部が有している搬送方向前方側の面において分散テーブルが揺動中に物品が搬送方向における後方へ移動するのを防止するとともに、搬送方向後方側の面において適度な速度で物品を搬送することができる。
【0027】
第7の発明に係る搬送装置は、第5または第6の発明に係る搬送装置であって、分散テーブルは、駆動機構によって水平方向において揺動される。
【0028】
ここでは、トラフの上流側に配置された分散テーブルを、水平方向において揺動させる。
【0029】
これにより、トラフまでの物品の搬送をスムーズに行うことができる。
【0030】
第8の発明に係る搬送装置は、第5から第7の発明のいずれか1つに係る搬送装置であって、分散テーブルの周端とトラフとの間に配置されており、物品の搬送を一時的に停止させるシャッタ機構を、さらに備えている。
【0031】
ここでは、分散テーブルと、分散テーブルから物品が供給されるトラフとの間に物品の搬送を阻止したり開放したりするシャッタ機構を備えている。
【0032】
これにより、分散テーブルの周囲に複数のトラフが配置されている場合において、シャッタ機構によって開閉を切り換えることで、各トラフに対して所定の数(例えば1個ずつ)の物品を供給することができる。
【0033】
第9の発明に係る組合せ計量装置は、第1から第8の発明のいずれか1つに係る搬送装置と、搬送装置から供給される物品を計量する計量部と、計量された物品を排出する排出部と、を備えている。
【0034】
ここでは、組合せ計量装置において計量部に対して物品を供給する供給部として上記搬送装置を用いている。
【0035】
これにより、物品をスムーズに計量部まで搬送するとともに、トラフの搬送面における物品の滑落による意図しない高速搬送を防止することが可能な組合せ計量装置を提供することができる。
【発明の効果】
【0036】
本発明の搬送装置によれば、物品をスムーズに計量部まで搬送するとともに、トラフの搬送面における物品の滑落による意図しない高速搬送を防止することができる。
【発明を実施するための最良の形態】
【0037】
[実施形態1]
本発明の一実施形態に係る搬送装置について、図1〜図5を用いて説明すれば以下の通りである。
【0038】
<搬送装置10全体の構成>
本発明の一実施形態に係る搬送装置10は、トラフ11上に載置された物品を所定の方向に搬送する搬送装置であって、図1に示すように、トラフ11と平行リンク機構(往復移動機構)20と、制御部30とを備えている。搬送装置10は、平行リンク機構20が搬送方向においてトラフ11を往復移動させながら物品を搬送する。また、搬送装置10においては、制御部30が、トラフ11の搬送方向における往復移動を、搬送方向前方への移動と搬送方向後方への移動とを間欠かつ等速で行う。制御部30は、後述する回転モータ14に接続されており、回転モータ14による回転駆動を制御するとともに、搬送装置10全体の制御を行う。
【0039】
<トラフ11>
トラフ11は、搬送される物品を載置するためのステンレス鋼板を折り曲げて成形した板金製のトレイ状の部材であって、図1に示すように、搬送方向前方側へ下方傾斜した状態で、モータボックス12の直上に設けられている。また、トラフ11は、図2(a)および図2(b)に示すように、その裏面から鉛直方向下向きに突出する突出部11a,11bを各2個ずつ有している。突出部11a,11bは、後述する2本の第1リンク(垂直部材)13aおよび2本の第2リンク(垂直部材)13bのそれぞれの一方の端部に形成された第1凹部15a・第2凹部15b(図4(a),図4(b)参照)とねじ等によって連結される。これにより、トラフ11は、第1リンク13aおよび第2リンク13bによって支持される。
【0040】
本実施形態の搬送装置10では、トラフ11に対して、後述する平行リンク13を介してモータボックス12内の回転モータ(回転駆動源)14からの回転駆動力が伝達される。このとき、トラフ11が搬送方向において前後に往復移動することで、搬送方向前方へ物品を搬送する。
【0041】
また、トラフ11の搬送面には、図2(a)および図2(b)に示すように、第1の面18aと第2の面18bとからなる複数の突起部18が形成されている。この突起部18は、トラフ11の搬送面において上部に突出するように形成されている。そして、第1の面18aは、第2の面18bよりも搬送方向における前側に配置されている。また、第1の面18aと第2の面18bとは、互いに交差する部分がトラフ11の搬送面から最も突出した部分となる。さらに、第1の面18aと第2の面18bとは、図5に示すように、トラフ11の搬送面に対して、第1の面18aの傾斜角度D1のほうが第2の面18bの傾斜角度D2よりも大きくなるように形成されている。このため、トラフ11を搬送方向における前後に往復移動させると、トラフ11上の物品は、トラフ11の往復移動とトラフ11の傾斜とによって搬送方向前方へ搬送されながら、第1の面18aによって搬送方向後方への移動を抑止されるとともに、第2の面18bによって搬送方向前側へ傾斜しているトラフ11上を物品が滑落することを回避できる。
【0042】
<平行リンク機構20>
平行リンク機構20は、搬送方向前方と搬送方向後方とでトラフ11を等速で移動させる機構である。そして、平行リンク機構20は、図1に示すように、モータボックス12、平行リンク13(第1リンク13a、第2リンク13b、第3リンク13c)、リンク部材16を備えている。
【0043】
(モータボックス12)
モータボックス12は、図1に示すように、内部に回転モータ(駆動部)14を備えている。そして、この回転モータ14を一方向に回転させることで、後述するリンク部材16を介して、平行リンク13(第1リンク13a、第2リンク13b、第3リンク13c)を搬送方向における前後に揺動させる。
【0044】
回転モータ14は、その回転軸の先端部分に円盤部材14aが接続されたステッピングモータである。円盤部材14aは、回転モータ14の回転中心から離れた位置に突出部14bを有している。そして、突出部14bは、一方の端部が第2リンク13bと接続されているリンク部材16の他方の端部と接続されている。これにより、回転モータ14を一方向に回転させるだけで、平行リンク13を前後に揺動させることができ、その結果、平行リンク13に接続されたトラフ11を往復移動させることが可能になる。
【0045】
また、回転モータ14は、制御部30によって回転制御されており、図1に示す搬送方向前方側への移動と搬送方向後方側への移動とが等速になるようにトラフ11を往復移動させる。さらに、回転モータ14は、制御部30によってトラフ11を一往復させるごとに所定時間停止させる、いわゆる間欠運転を行うように制御部30によって制御される。これにより、回転モータ14のトルクを軽減して、搭載するモータの容量を小さくすることができる。
【0046】
なお、本実施形態では、図1に示すように、モータボックス12がトラフ11の直下に配置されているが、これに限定されるものではない。例えば、モータボックス12がトラフ11の横や後ろに配置されていてもよい。
【0047】
(平行リンク13)
平行リンク13は、第1リンク13a、第2リンク13b、第3リンク13cを備えている。
【0048】
第1リンク13aは、図1に示すように、一方の端部が第3リンク13cおよびリンク部材16と、他方の端部がモータボックス12の側面とそれぞれ回動可能な状態で接続されている。一方、第2リンク13bは、一方の端部が第3リンク13cと、他方の端部がモータボックス12の側面とそれぞれ回動可能な状態で接続されている。これにより、平行リンク13は、回転モータ14からリンク部材16を介して回転駆動力が伝達されると、モータボックス12との接続位置を回動中心として鉛直平面内において前後に揺動する。
【0049】
さらに、第1リンク13aは、モータボックス12の側面における第2リンク13bよりも搬送方向前方側に取り付けられている。また、第1リンク13aは、図4(a)に示すように、一方(上側)の端部に第1凹部15aを有している。そして、この第1凹部15aは、鉛直方向上向きに開口部分が向くように形成されており、上述したトラフ11の突出部11aを保持する。
【0050】
第2リンク13bは、第1リンク13aよりもモータボックス12における搬送方向後方側よりに取り付けられている。また、第2リンク13bは、図4(b)に示すように、一方(上側)の端部に第2凹部15bを有している。そして、この第2凹部15bは、物品の水平方向における搬送方向前方側、つまり平行リンク機構20から見て水平方向内向きに開口部分が向くように形成されており、上述したトラフ11の他方の突出部11bを保持する。
【0051】
第3リンク13cは、図1に示すように、第1リンク13aと第2リンク13bとをそれぞれの下部において接続する。これにより、リンク部材16と接続されている第1リンク13aを揺動させることにより、第2リンク13bについても揺動させることができ、結果として、平行リンク13全体を搬送方向において前後に揺動させることが可能になる。
【0052】
また、第1リンク13aおよび第2リンク13bは、図3に示すように、モータボックス12の側面との連結部分を中心にして回動して搬送方向後方側に傾斜した位置(第2状態)と鉛直方向に平行な位置(第1状態)との間の範囲内で前後に揺動する。このように、平行リンク13の可動範囲を搬送方向における後方側の範囲を含むようにトラフ11を往復移動させることで、トラフ11上の物品にはトラフ11から搬送方向前方側の斜め上向きに投げ上げるような力が加えられる。よって、搬送される物品はトラフ11上から斜め上方へ投げ上げられるようにして徐々に搬送方向前方へ搬送される。
【0053】
なお、平行リンク13は、トラフ11に対して、搬送方向後方側よりに、つまりトラフ11の中心部分よりも後ろよりに取り付けられている。
【0054】
(リンク部材16)
リンク部材16は、図1に示すように、一方の端部が平行リンク13(第2リンク13bおよびリンク部材16)に、他方の端部が回転モータ14の円盤部材14aの突出部14bに、それぞれ回動可能な状態で接続されている。そして、回転モータ14が回転を開始すると円盤部材14aが回転する。このとき、円盤部材14aの突出部14bに接続されたリンク部材16は、突出部14bを中心として回動自在に固定されているため、回転モータ14が回転することによりリンク部材16の他端に接続された平行リンク13(第1リンク13a)を、モータボックス12との接続部分を回転中心として前後に揺動させることができる。
【0055】
本実施形態の搬送装置10では、以上のように、回転モータ14による回転駆動を直接平行リンク13に伝達するのではなく、リンク部材16を介して伝達している。これにより、回転モータ14を正逆反転させなくても、一方向に回転させながらトラフ11を往復移動させることができる。
【0056】
<搬送装置10の動作説明>
ここで、本実施形態の搬送装置10による物品の搬送工程について説明する。
【0057】
まず、ユーザが搬送開始の指示を入力すると、制御部30が平行リンク機構20の回転モータ14の回転を開始させる。そして、この回転モータ14からの回転駆動力がリンク部材16を介して平行リンク13(第1リンク13a)に伝達され、搬送方向に平行な鉛直平面内で平行リンク13を前後に揺動させる。このとき、揺動される平行リンク13はトラフ11の裏面から突出した突出部11a,11bに接続されているため、トラフ11を搬送方向において前後に往復移動させることができる。
【0058】
また、トラフ11を搬送方向において前後に往復移動させる平行リンク13は、図3に示す可動範囲内において第1・第2リンク13a,13bにおける第3リンク13cとの接続側を回動中心として前後に揺動する。より詳細には、第1・第2リンク13a,13bは、鉛直方向に平行な第1状態と搬送方向における後方側へ傾斜した第2状態との間において繰り返し前後に揺動する。このように、搬送方向における後方側において第1・第2リンク13a,13bを前後に揺動させることで、搬送方向前方側の斜め上方へ投げ上げるようにトラフ11を往復移動させることができる。この結果、トラフ11上の物品に対して斜め上向きの力を付与することができるため、例えば、表面に粘着性のあるような物品や振動を吸収してしまう物品であってもスムーズに搬送することが可能になる。
【0059】
さらに、本実施形態では、上述のように搬送方向において前後に往復移動するトラフ11が、図1および図2に示すように、搬送方向前方に向かって下方傾斜している。そして、トラフ11の搬送面には、突起部18が形成されている。この突起部18は、第1の面18aと第2の面18bとを含んでいる。第1の面18aは搬送方向前方側に形成されている一方、第2の面18bは搬送方向後方側へ形成されている。そして、第1の面18aは、図5に示すように、第2の面18bと比較してトラフ11の搬送面に対する傾斜角度が大きくなるように(傾斜角度D1>傾斜角度D2)形成されている。このため、搬送される物品が、トラフ11が搬送方向において往復移動する際に搬送方向後方へ移動してしまうことを第1の面18aによって抑制することができる。そして、トラフ11が搬送方向前方側へ下方傾斜しているために搬送面上の物品が搬送面上を滑落することで搬送中の物品が必要以上の搬送速度で搬送面上を滑落してしまうという問題の発生を、第2の面18bによって抑制することができる。このように、トラフ11を搬送方向において前方に下方傾斜させることと、トラフ11上に突起部18を形成することとを組み合わせることで、必要以上の搬送速度で物品が搬送されることなく、表面に粘着性のある物品や振動を吸収してしまうような物品等であってもスムーズに搬送することができる。
【0060】
なお、上述したように、トラフ11の往復移動中には、搬送方向前方への移動と搬送方向後方への移動とが等速になるように制御部30によって制御される。これにより、駆動部(回転モータ14)への負荷を低減した状態で物品の搬送を行うことができるとともに、搬送方向前後において異なる速度で移動させる制御と比較して制御部30による制御負担を軽減することができる。さらに、トラフ11は、搬送方向において前後に往復移動する際に、一往復ごとに所定間隔をあけて間欠で移動する。このため、連続的に往復移動させる制御と比較して、トラフ11の移動回数を減らして効率よく物品の搬送を行うことができる。
【0061】
[搬送装置10の特徴]
(1)
本実施形態の搬送装置10は、図1に示すように、トラフ11を平行リンク機構20によって往復移動させてトラフ11上に載置された物品を所定の方向へ搬送する搬送装置であって、トラフ11が、搬送方向における前方に向かって下方傾斜している。そして、図2に示すように、トラフ11の搬送面には第1の面18aと第2の面18bとを含む突起部18が形成されている。そして、図5に示すように、第1の面18aの搬送面に対する傾斜角度D1は、第2の面18bの搬送面に対する傾斜角度D2よりも大きい。
【0062】
これにより、例えば、搬送される物品が表面に粘着性があったり、振動を吸収したりして搬送しにくい物品であっても、トラフ11の下方傾斜および第1の面18aによる搬送方向後方への物品の移動の抑制によってスムーズに搬送を行うことができる。さらに、トラフ11を搬送方向前方に向かって下方傾斜させていても、必要以上の搬送速度で物品が搬送されることや、トラフ11の往復移動を停止した際の物品のずれ落ち等の問題の発生を、第2の面18bによって防止することができる。この結果、トラフ11の搬送方向前方に向かう下方傾斜と、トラフ11の搬送面上に形成された突起部18の第1の面18a,第2の面18bとを組み合わせることで、物品の種類を問わず良好な搬送を行うことが可能になる。
【0063】
(2)
本実施形態の搬送装置10では、搬送方向においてトラフ11を往復移動させる往復移動機構としての平行リンク機構20に、トラフ11を支持する第1・第2リンク13a,13bを備えている。そして、第1リンク13a,第2リンク13bは、図3に示すように、鉛直方向に平行になる第1状態と、搬送方向における後方へ傾斜した第2状態との間において、前後に揺動する。
【0064】
このように、搬送方向における後方側の範囲を含むように平行リンク13(第1リンク13a、第2リンク13b)を揺動させることで、トラフ11上の物品に対して搬送方向斜め上方に向かう力を付与することができる。この結果、トラフ11上の物品を搬送方向における斜め上方へ投げ上げるようにして物品を搬送することができるため、表面に粘着性のある物品や振動を吸収してしまうような物品等であってもスムーズに搬送することができる。
【0065】
(3)
本実施形態の搬送装置10では、制御部30が、トラフ11が搬送方向における前方と後方とで等速で移動するように回転モータ14の回転駆動を制御する。
【0066】
これにより、例えば、ファーストバック搬送機構のように、搬送方向における前後においてトラフ11の移動速度を変更して駆動する機構と比較して、回転モータ14のトルクを低減してモータの容量を小さくすることができるとともに、制御部30による駆動制御の負担を軽減することができる。
【0067】
(4)
本実施形態の搬送装置10では、制御部30が、トラフ11を搬送方向において前後に一往復させるごとに所定時間を開けて駆動する、いわゆる間欠駆動を行う。
【0068】
これにより、連続的にトラフ11を往復移動させる場合と比較して、回転モータ14の回転数を削減して、より効率よく物品の搬送を行うことができる。
【0069】
[実施例]
ここでは、上記実施形態1において説明したトラフ11の下方傾斜とトラフ11の搬送面の突起部18とを組み合わせた搬送装置10の搬送性能についての試験結果を、図11〜図13を用いて説明する。
【0070】
この搬送性能確認試験では、搬送距離200mm、搬送される物品として鶏肉を使用して、トラフ11の搬送方向前後における搬送速度を等速(1200pps)とした条件において、トラフ11の傾斜の有無、トラフ11の搬送面の突起物18の有無、第1・第2リンク13a,13bの可動範囲が水平か投げ上げ(後方稼動)か、についてそれぞれ試験を行った。
【0071】
まず、トラフ11の下方傾斜の有無については、下方傾斜無しの図11および下方傾斜有りの図12の試験結果を比較すると、トラフ11がフラット(下方傾斜無し)の試験結果とトラフ11を下方傾斜させた場合の試験結果とで、鶏肉の搬送時間が大幅に短縮されていることが分かる。例えば、搬送面がフラット(突起物無し)の試験結果同士で比較すると、下方傾斜無し(図11)では搬送時間が10秒以上かかっているのに対して、下方傾斜有り(図12)では4秒以下と短縮されている。これにより、トラフ11を搬送方向前方に向かって下方傾斜させたほうが、搬送時間の短縮が図れることが分かる。
【0072】
次に、トラフ11の搬送面に形成された突起部18の有無については、図11および図12の双方の試験結果から明らかなように、トラフ11の搬送面に突起部18を形成したほうが搬送時間を大幅に短縮できていることが分かる。例えば、図11の試験結果から分かるように、搬送面フラット(突起物無し)の試験結果が10秒以上であるのに対して、搬送面に突起部18を形成した山付きの試験結果では約1秒まで搬送時間が短縮されている。図12の試験結果についても同様に、搬送面フラット(突起物無し)の試験結果が3秒以上であるのに対して、山付きの試験結果は約1秒まで搬送時間を短縮している。これにより、トラフ11の搬送面に突起部18を形成すると、搬送時間の短縮を図れることが分かる。
【0073】
さらに、搬送面に突起部18を形成するとともにトラフ11を下方傾斜させた場合には、図12の試験結果に示すように、1秒以下まで搬送時間の短縮が図れる。
【0074】
なお、トラフ11の下方傾斜の程度については、図13の試験結果に示すように、傾斜角度を7°、13°と大きくすると、仕様を満足させるために必要な回転モータ14の回転数を450rpmから350rpm、250rpmと落とすことができる。これにより、搬送される物品の性質に応じて、過度の搬送速度にならないような適切な傾斜角度でトラフ11の取付けを行うことで、トラフ11を往復移動させる回転モータ14の負担を軽減することができる。
【0075】
また、平行リンク13の第1・第2リンク13a,13bが搬送方向後方側に傾斜した状態(第1状態)と鉛直方向に向いた状態(第1状態)との間を揺動するようにして物品を投げ上げるように搬送することは、図11および図12の試験結果として示すように、投げ上げのほうが若干搬送時間を短縮できることが分かる。例えば、図12の試験結果によれば、搬送面フラット、搬送面山付きの試験結果ともに、投げ上げの試験結果のほうが若干搬送時間を短縮できている。
【0076】
以上の試験結果を参照すると、トラフ11を搬送方向前方に向かって下方傾斜させ、トラフ11の搬送面に突起部18を形成することで、トラフ11上の物品の搬送時間を大幅に短縮できることが分かる。さらに、平行リンク13については、トラフ11を水平に往復移動させるよりも、トラフ11上の物品を搬送方向前方へ投げ上げるように搬送方向後方に傾斜させる範囲内で往復移動させるほうが、若干の搬送時間の短縮が図れることも分かる。
【0077】
[実施形態2]
本発明の一実施形態に係る搬送装置を備えた組合せ計量装置について、図6〜図7を用いて説明すれば以下の通りである。
【0078】
<組合せ計量装置50全体の構成>
本実施形態に係る組合せ計量装置50は、図6に示すように、複数の計量ホッパ(計量部、排出部)55の計量値を用いて、被計量物の集合体が所定重量あるいは所定数量になるように組合せ計量を行う装置である。そして、組合せ計量装置50は、実施形態1において説明した搬送装置10を、供給トラフ群53として備えている。なお、供給トラフ群53の構成は、実施形態1において説明した搬送装置10と同様であるため、ここでは同じ符号を付し、詳細な構成についての説明は省略する。
【0079】
組合せ計量装置50は、主として、前段の供給コンベア装置90が被計量物(以下、物品という)を落下させる位置の真下に配置される円錐状の分散テーブル52と、分散テーブル52の周囲に配置される供給トラフ群(搬送装置)53と、複数のプールホッパ54および計量ホッパ55と、集合排出シュート56とから構成されている。
【0080】
分散テーブル52は、図7に示すように、傘状の円形板であって、駆動モータ(駆動機構)52aによって連続回転する。分散テーブル52の上面に供給コンベア装置90から供給された物品は、遠心力によって分散しながら供給トラフ群53へと移動する。
【0081】
供給トラフ群53の各トラフ11は、回転モータ14(図1および図7参照)からの回転駆動力が平行リンク13等を介して伝達されることで、搬送方向(分散テーブル52を中心とする半径方向外側)に向かって物品を搬送する。
【0082】
プールホッパ54は、供給トラフ群53から物品を受け取って一時的にプールし、図示しない制御部からの指令によって下部に設けられている開閉ゲートを開け、計量ホッパ55に物品を供給する。
【0083】
計量ホッパ55は、プールホッパ54の下方に設けられている。計量ホッパ55およびプールホッパ54は、トラフ11に対応して、円周方向に沿って複数配置されている。それぞれの計量ホッパ55は、ホッパ内の物品の重量を計測するためのロードセル(図示せず)を有しており、また、その下部には、計量ホッパ55が排出部として機能するために、物品を集合排出シュート56に投下するための開閉ゲート(図示せず)が設けられている。
【0084】
集合排出シュート56は、各計量ホッパ55から投下された物品を集めて、包装機などの後段の装置に物品を流し落とす。
【0085】
<分散テーブル52の構成>
分散テーブル52は、円周上に配置された供給トラフ群53の中心であって、供給トラフ群53の直上流側に配置されており、供給コンベア装置90から供給される物品を供給トラフ群53に向かって搬送する。
【0086】
また、分散テーブル52は、駆動モータ(駆動機構)52aからの回転駆動力を受けて、水平方向において連続回転する(図7参照)。より詳細には、駆動モータ52aの回転駆動力が、図示しない複数のギアを介して分散テーブル52を支持する支持部52bに伝達されることで、支持部52bに接続されている分散テーブル52を水平方向において回転させる。これにより、分散テーブル52上に供給された物品に対して遠心力をかけることができ、分散テーブル52の周囲を取り囲むよう複数配置された供給トラフ群53のトラフ11に対してほぼ均一に物品を搬送することができる。
【0087】
さらに、分散テーブル52の略円形の外周部には、図7に示すように、各供給トラフ群53に対応して複数のシャッタ機構57が設けられている。シャッタ機構57は、通常時にはシャッタ部57aを閉状態となって物品Pの搬送を一時的に停止させ、供給トラフ群53またはプールホッパ54が空になると開状態となって物品Pを供給トラフ群53へ供給することにより、例えば、各供給トラフ群53またはプールホッパ54に対して1個ずつ物品Pを搬送する。また、シャッタ機構57は、シャッタ部57a、回動部57b、駆動部57cを有している。
【0088】
シャッタ部57aは、分散テーブル52から搬送されてきた物品Pを受け止めるトレイ状の部材であって、回動部57bに形成された回動中心を中心にして略水平状態から斜め下方へ回動することで、物品Pの搬送を一時的に停止させた状態から物品Pの供給状態へと移行して、物品Pを供給トラフ群53に対して搬送するタイミングを調整する。
【0089】
回動部57bは、シャッタ部57aの後端側(分散テーブル52側)に連結されており、駆動部57cに回転可能な状態で接続されている回動中心を中心にして回転することで、シャッタ部57aの開閉状態を切り換える。
【0090】
駆動部57cは、内部に図示しないシリンダ、リンクを備えており、シリンダの水平駆動をリンクを介して回動部57bに対して伝達することで、シャッタ部57aの開閉を行う。
【0091】
[組合せ計量装置50の特徴]
(1)
本実施形態の組合せ計量装置50では、図6に示すように、分散テーブル52、プールホッパ54、計量ホッパ55に加えて、上述した実施形態1で説明した搬送装置10を供給トラフ群53として複数搭載している。
【0092】
これにより、搬送対象となる物品が表面に粘着性のある物品や振動を吸収してしまうような物品(例えば、漬物や鶏肉等)であっても、過度の搬送速度になることなく、スムーズに下流側であるプールホッパ54まで搬送することができる。
【0093】
(2)
本実施形態の組合せ計量装置50では、図7に示すように、搬送装置としての供給トラフ群53の上流側に略傘型の分散テーブル52を配置しており、この分散テーブル52を回転させることで物品Pを分散テーブル52の回転中心から半径方向外側に向かって搬送する。
【0094】
これにより、分散テーブル52上の物品に対して遠心力を加えて、分散テーブル52の外周部に向かって物品Pを搬送することができる。
【0095】
(3)
本実施形態の組合せ計量装置50では、分散テーブル52を水平面内で回転させて分散テーブル52上に載置された物品Pを外周側へ搬送する。
【0096】
これにより、分散テーブル52の周辺に複数配置された供給トラフ群53に対してほぼ均一に物品Pの搬送を行うことができる。
【0097】
(4)
本実施形態の組合せ計量装置50では、図7に示すように、分散テーブル52の外周部とプールホッパ54との間にシャッタ機構57を設けている。
【0098】
これにより、シャッタ機構57のシャッタ部57aを開閉することで、分散テーブル52から物品が搬送される供給トラフ群53によるプールホッパ54に対する物品Pを供給するタイミングを制御することができる。よって、プールホッパ54や計量ホッパ55に対して、1個ずつ物品Pを供給する必要がある組合せ計量装置にも対応することができる。
【0099】
[他の実施形態]
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
【0100】
(A)
上記実施形態では、トラフ11の往復移動を平行リンク機構20によって行う例を挙げて説明した。しかし、本発明はこれに限定されるものではなく、他の搬送機構によってトラフ11を往復移動させる搬送装置であってもよい。
【0101】
(B)
上記実施形態1では、トラフ11の往復移動を等速で行っている例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0102】
例えば、往復移動の往路を復路側よりも早くした場合、あるいはその反対にした場合でも、上記と同様の効果を得ることができる。なお、このようなトラフ11の往復移動の駆動の種類については、搬送される物品の性質等を考慮して適切な搬送を行うことが可能な駆動に決定することができる。
【0103】
(C)
上記実施形態1では、トラフ11の往復移動を間欠で行っている例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0104】
例えば、トラフ11を連続して往復移動させるように制御した場合でも、上記と同様の効果を得ることができる。
【0105】
(D)
上記実施形態1では、図3に示すように、平行リンク13(第1リンク13a、第2リンク13b)の可動範囲を、鉛直方向と搬送方向における後方側に傾斜した位置との間とする例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0106】
例えば、鉛直方向よりも搬送方向前方側に傾斜した位置を含むような範囲において平行リンク13を往復移動させてもよい。この場合でも、第1リンク13a、第2リンク13bが搬送方向後方側に傾斜した範囲を搬送方向前方側に傾斜した範囲よりも多く含んでいることで、物品を投げ上げるように搬送することができる。
【0107】
(E)
上記実施形態2では、分散テーブル52を所定の速度で連続回転させることで物品を搬送する例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0108】
例えば、図8に示すような、駆動モータ64aとリンク機構64bとを有する駆動機構64を用いて、分散テーブル52の回転方向を交互に切り換えて物品に対して遠心力を与えるように制御してもよいし、連続回転ではなく間欠回転によって物品に対して遠心力を与えるように制御してもよい。
【0109】
(F)
上記実施形態2では、分散テーブル52の形状が略円錐形状である例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0110】
例えば、図9に示すように、円錐形状の頭頂部62aの周囲に水平方向に延びるドーナツ型の部材62bを取り付けた構成の分散テーブル62であってもよい。
【0111】
(G)
上記実施形態2では、分散テーブル52の搬送面には何も形成されていない例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0112】
例えば、図9に示すように、搬送面から突出した突起部68が形成された分散テーブル62であってもよい。この突起部68は、上述した実施形態1の突起部18と同様に、第1の面68aと第2の面68bとを有しており、搬送面に対する第1の面68aの傾斜角度が第2の面68bよりも大きくなるように形成されている。
【0113】
このため、図8に示す駆動機構64によって水平面内で分散テーブル62を所定の回転角度で回転方向を切り換えながら揺動させる場合には、実施形態1の突起部18と同様に、分散テーブル62上における物品の搬送方向(分散テーブル62の回転中心を中心とする円周方向(図10参照))後方への物品の移動を第1の面68aによって抑制することで、搬送方向前方に向かって物品をスムーズに搬送することができる。
【0114】
なお、この場合、分散テーブル62上の物品は、図10に示す矢印方向に分散移動していく。すなわち、分散テーブル62上の物品は、分散テーブル62の揺動によって分散テーブル62上を円周方向に滑りながら遠心力によって半径方向外側へ移動する。このため、分散テーブル62における搬送方向とは、分散テーブル62の回転中心を中心とする円周に沿った方向となる。よって、図8に示す駆動機構64によって水平方向において揺動される分散テーブル62では、突起部68の第1の面68aと第2の面68bとを搬送方向としたい向きに沿って配置すればよい。
【0115】
(H)
上記実施形態2では、分散テーブル52の外周部にシャッタ機構57を設けた例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0116】
例えば、シャッタ機構57を設けていない構成であっても、上記と同様の効果を得ることができる。ただし、上記実施形態2のように、シャッタ機構57を設けることで、例えば、鶏肉等の物品を1個ずつ計量ホッパに投入する必要がある組合せ計量装置等に対応することができる。
【産業上の利用可能性】
【0117】
本発明の搬送装置は、表面に粘着性のある物品や振動を吸収してしまう物品等の搬送しにくい物品を搬送方向下流側へスムーズに搬送することができるという効果を奏することから、多様な物品を搬送する搬送装置に対して広く適用可能である。
【図面の簡単な説明】
【0118】
【図1】本発明の一実施形態に係る搬送装置を示す側断面図。
【図2】(a),(b)は、図1の搬送装置が備えているトラフを示す側断面図と平面図。
【図3】図1の搬送装置が備えている平行リンク可動範囲を示す正面図。
【図4】(a),(b)は、2つの支持部材を示す正面図。
【図5】図2(a)のA部分を拡大した図。
【図6】本発明の他の実施形態に係る組合せ計量装置の構成を示す模式図。
【図7】図6の組合せ計量装置における分散テーブル周辺の詳細図。
【図8】(a),(b)は、図7の分散テーブル上からの物品の搬送方向を示す側面図および平面図。
【図9】本発明の他の実施形態に係る組合せ計量装置が備えた分散テーブルを揺動させる駆動機構を示す平面図。
【図10】(a),(b)は、本発明の他の実施形態に係る組合せ計量装置が備えた分散テーブルを示す側面図および平面図。
【図11】本発明の搬送装置の搬送性能を示す確認試験の結果を示すグラフ。
【図12】本発明の搬送装置の搬送性能を示す確認試験の結果を示すグラフ。
【図13】本発明の搬送装置の搬送性能を示す確認試験の結果を示すグラフ。
【符号の説明】
【0119】
10 搬送装置
11 トラフ
11a・11b 突出部
12 モータボックス
13 平行リンク
13a 第1リンク(垂直部材)
13b 第2リンク(垂直部材)
13c 第3リンク
14 回転モータ(駆動部)
14a 円盤部材
14b 突出部
15a 第1凹部
15b 第2凹部
16 リンク部材
18 突起部
18a 第1の面
18b 第2の面
20 平行リンク機構(往復移動機構)
30 制御部
50 組合せ計量装置
52 分散テーブル
52a 駆動モータ(駆動機構)
52b 支持部
53 供給トラフ群(搬送装置)
54 プールホッパ
55 計量ホッパ(計量部、排出部)
56 集合排出シュート
57 シャッタ機構
57a シャッタ部
57b 回動部
57c 駆動部
62 分散テーブル
62a 頭頂部
62b ドーナツ型の部材
64 駆動機構
64a 駆動モータ
64b リンク機構
68 突起部
68a 第1の面
68b 第2の面
90 供給コンベア装置
D1,D2 傾斜角度
P 物品
【特許請求の範囲】
【請求項1】
搬送する物品を載置するとともに、その搬送面が搬送方向前方に向かって下方に傾斜しているトラフと、
前記トラフを揺動させる往復移動機構と、
前記往復移動機構を駆動する駆動部と、
前記トラフの搬送面に形成されており、前記搬送面に対して前記搬送方向前方側における面の傾斜角度が前記搬送方向後方側における面の傾斜角度よりも大きい突起部と、
を備えている搬送装置。
【請求項2】
前記往復移動機構は、前記トラフを支持する垂直部材を有しており、
前記垂直部材は、鉛直方向に平行になる第1状態と、前記搬送方向後方側に傾いた第2状態との間を含む範囲内を往復移動する、
請求項1に記載の搬送装置。
【請求項3】
前記駆動部による前記往復移動機構の駆動を制御する制御部をさらに備え、
前記制御部は、前記トラフが前記搬送方向における前後に等速で移動するように前記駆動部を制御する、
請求項1または2に記載の搬送装置。
【請求項4】
前記制御部は、前記トラフが前記搬送方向における前後に一往復するごとに間欠で移動するように前記駆動部を制御する、
請求項3に記載の搬送装置。
【請求項5】
前記トラフの上流側に配置されており、載置された前記物品が中心部から分散するように揺動される略円形の分散テーブルと、前記分散テーブルを揺動させる駆動機構と、をさらに備えた、
請求項1から4のいずれか1項に記載の搬送装置。
【請求項6】
前記分散テーブルの前記物品の載置面の周端側には、前記分散テーブルにおける搬送方向前方側の面が搬送方向後方側の面よりも傾斜角度が大きい突起部が形成されている、
請求項5に記載の搬送装置。
【請求項7】
前記分散テーブルは、前記駆動機構によって水平方向において揺動される、
請求項5または6に記載の搬送装置。
【請求項8】
前記分散テーブルの周端と前記トラフとの間に配置されており、前記物品の搬送を一時的に停止させるシャッタ機構を、さらに備えている、
請求項5から7のいずれか1項に記載の搬送装置。
【請求項9】
請求項1から8のいずれか1項に記載の搬送装置と、
前記搬送装置から供給される物品を計量する計量部と、
前記計量された物品を排出する排出部と、
を備えた組合せ計量装置。
【請求項1】
搬送する物品を載置するとともに、その搬送面が搬送方向前方に向かって下方に傾斜しているトラフと、
前記トラフを揺動させる往復移動機構と、
前記往復移動機構を駆動する駆動部と、
前記トラフの搬送面に形成されており、前記搬送面に対して前記搬送方向前方側における面の傾斜角度が前記搬送方向後方側における面の傾斜角度よりも大きい突起部と、
を備えている搬送装置。
【請求項2】
前記往復移動機構は、前記トラフを支持する垂直部材を有しており、
前記垂直部材は、鉛直方向に平行になる第1状態と、前記搬送方向後方側に傾いた第2状態との間を含む範囲内を往復移動する、
請求項1に記載の搬送装置。
【請求項3】
前記駆動部による前記往復移動機構の駆動を制御する制御部をさらに備え、
前記制御部は、前記トラフが前記搬送方向における前後に等速で移動するように前記駆動部を制御する、
請求項1または2に記載の搬送装置。
【請求項4】
前記制御部は、前記トラフが前記搬送方向における前後に一往復するごとに間欠で移動するように前記駆動部を制御する、
請求項3に記載の搬送装置。
【請求項5】
前記トラフの上流側に配置されており、載置された前記物品が中心部から分散するように揺動される略円形の分散テーブルと、前記分散テーブルを揺動させる駆動機構と、をさらに備えた、
請求項1から4のいずれか1項に記載の搬送装置。
【請求項6】
前記分散テーブルの前記物品の載置面の周端側には、前記分散テーブルにおける搬送方向前方側の面が搬送方向後方側の面よりも傾斜角度が大きい突起部が形成されている、
請求項5に記載の搬送装置。
【請求項7】
前記分散テーブルは、前記駆動機構によって水平方向において揺動される、
請求項5または6に記載の搬送装置。
【請求項8】
前記分散テーブルの周端と前記トラフとの間に配置されており、前記物品の搬送を一時的に停止させるシャッタ機構を、さらに備えている、
請求項5から7のいずれか1項に記載の搬送装置。
【請求項9】
請求項1から8のいずれか1項に記載の搬送装置と、
前記搬送装置から供給される物品を計量する計量部と、
前記計量された物品を排出する排出部と、
を備えた組合せ計量装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2006−199424(P2006−199424A)
【公開日】平成18年8月3日(2006.8.3)
【国際特許分類】
【出願番号】特願2005−12396(P2005−12396)
【出願日】平成17年1月20日(2005.1.20)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
【公開日】平成18年8月3日(2006.8.3)
【国際特許分類】
【出願日】平成17年1月20日(2005.1.20)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
[ Back to top ]